Embed Size (px)
DESCRIPTION
ME2134
Citation preview
![Page 1: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/1.jpg)
1
ME 2134: Fluid Mechanics IPart 2
By
T. T. Lim
Office: E2-03-18
Recommended and Reference Texts:
(1) Cengel Y.A. and Cimbala J.M.:“Fluid Mechanics: Fundamental and Applications” (McGraw-Hill 2006)
(2) E.John Finnemore and Joseph B. Franzini:“Fluid Mechanics with Engineering Applications” (10th edition), McGraw Hill, 2002.
(3) R.W. Fox and A.T. McDonald:“Introduction to Fluid Mechanics” (4th edition), John Wiley & Sons, 1992.
(4) K.L. Kumar:“Engineering Fluid Mechanics”. Eurasian Publishing house
(5) B. Massey (revised by J Ward-Smith):“Mechanics of Fluids”. Stanley Thornes (Publishers) Ltd, c1998.
(6) B.R. Munson, D.F. Young and T.H. Okiishi:“Fundamentals of Fluid Mechanics” (3rd edition), John Wiley & Sons, 1998.
![Page 2: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/2.jpg)
2
(7) M.C. Potter and D.C. Wiggert:“Mechanics of Fluids” (2nd edition), Prentice-Hall International, 1997
(8) Irving H. Shames:“Mechanics of Fluids” (3rd Edition), McGraw Hill, 1992.
(9) Alexander J. Smits:“A Physical Introduction to Fluid Mechanics” (1st edition), John Wiley, 2000.
(10) V.L. Streeter, E.B. Wylie and K.W. Bedford: “Fluid Mechanics” (9th edition), McGraw Hill, 1998.
(11) F.M. White:“Fluid Mechanics” (7th Edition), McGraw Hill, 2011.
(12) A. Jeffrey:“Handbook of Mathematical Formulas and Integration” (2nd Edition), Academic Press, 2000.
Module Outline:
1. Equilibrium of Moving Fluids (in translation and rotation).
2. Momentum and its Applications.
3. Dimensional Analysis and Similitude.
4. Analysis of Pipe Flow
![Page 3: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/3.jpg)
3
Equilibrium of Moving Fluids
Stationary Tank
p= pa + ρgz
Pa
z
p
V=ConstantMoving Tank
z
Pa
p
p= ??
(A) Statics of a Moving System
V=Constantz
Pa
p
p= pa + ρgz
When the entire continuum is in uniform RECTILINER motion, the governing principle of the statics of a fluid in the gravity field remains the same.
A container moving with a CONSTANT VELOCITY
![Page 4: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/4.jpg)
4
(B) Uniform Rectilinear Acceleration
a=Constant accelerationAccelerating Tankz
Pa
p
What does the fluid/air interface look like ?
p= ?
Questions:
Under constant acceleration
ax
aaz
z
x
dx
dz
2dx
xpp∂∂
−
2dz
zpp∂∂
−
2dx
xpp∂∂
+
2dz
zpp∂∂
+
p ax
az
wt
dz
dxA
B C
D
Fluid element has a unit depth
![Page 5: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/5.jpg)
5
2dx
xpp∂∂
−
2dz
zpp∂∂
−
2dx
xpp∂∂
+
2dz
zpp∂∂
+
p ax
az
wtdz
dxA
B C
D
Fluid element has unit depth
( ) xa1.dz.dxdz2
dx.xppdz
2dx.
xpp ρ=⎟
⎠⎞
⎜⎝⎛
∂∂
+−⎟⎠⎞
⎜⎝⎛
∂∂
−
xaxp
ρ−=∂∂
The equation of motion in the x-direction is
Simplifying the above equation gives
(B1)
⎟⎠⎞
⎜⎝⎛
∂∂
−2
dxxpp 1.dz
2dx
xpp ⎟
⎠⎞
⎜⎝⎛
∂∂
−
⎟⎠⎞
⎜⎝⎛
∂∂
+2
dxxpp 1.dz
2dx
xpp ⎟
⎠⎞
⎜⎝⎛
∂∂
+
⎟⎠⎞
⎜⎝⎛
∂∂
−2dz
zpp 1.dx
2dz
zpp ⎟
⎠⎞
⎜⎝⎛
∂∂
−
⎟⎠⎞
⎜⎝⎛
∂∂
+2dz
zpp 1.dx
2dz
zpp ⎟
⎠⎞
⎜⎝⎛
∂∂
+
dx × 1AD
dx × 1BC
dz × 1CD
dz × 1AB
ForcePressureAreaFacex
z
2dx
xpp∂∂
−
2dz
zpp∂∂
−
2dx
xpp∂∂
+
2dz
zpp∂∂
+
p ax
az
wtdz
dxA
B C
D
Fluid element has a unit depth
( ) ( ) za1.dz.dx1.dz.dxgdx2dz.
zppdx
2dz.
zpp ρ=ρ−⎟
⎠⎞
⎜⎝⎛
∂∂
+−⎟⎠⎞
⎜⎝⎛
∂∂
−
( )gazp
z +ρ=∂∂
−
Similarly, the equation of motion in the z-direction is
Expanding and simplifying the above equation gives
(B2)
⎟⎠⎞
⎜⎝⎛
∂∂
−2
dxxpp 1.dz
2dx
xpp ⎟
⎠⎞
⎜⎝⎛
∂∂
−
⎟⎠⎞
⎜⎝⎛
∂∂
+2
dxxpp 1.dz
2dx
xpp ⎟
⎠⎞
⎜⎝⎛
∂∂
+
⎟⎠⎞
⎜⎝⎛
∂∂
−2dz
zpp 1.dx
2dz
zpp ⎟
⎠⎞
⎜⎝⎛
∂∂
−
⎟⎠⎞
⎜⎝⎛
∂∂
+2dz
zpp 1.dx
2dz
zpp ⎟
⎠⎞
⎜⎝⎛
∂∂
+
dx × 1AD
dx × 1BC
dz × 1CD
dz × 1AB
ForcePressureAreaFace
z
![Page 6: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/6.jpg)
6
Integrate equation (B1) gives, xaxp
ρ−=∂∂
(B1)
Therefore equation (B5) becomes ( )[ ] ozx pzgaxap ++ρ+ρ−= (B6)
Similarly, integrating equation (B2) gives
where f(x) is a term containing only x, and c2 is a constant.
( ) 2z c)x(fzgap +++ρ−= (B4) ( )ga
zp
z +ρ=∂∂
− (B2)
z
x
po
0
Substituting the boundary condition (at x=0, z=0, p=po.) into equation (B5) gives
c3=po
1x c)z(fxap ++ρ−= (B3)
where f(z) is a term containing only z, and c1 is a constant.
( )[ ] 3zx czgaxap ++ρ+ρ−= (B5)
Now equations (B3) and (B4) are compatible only if
where c3 is a new constant which depends on boundary condition.
To find the slope of the free surface, we substitute p=po into equation (B6) which leads to
gaa
dxdztan
z
x
+−==θ (B7)
It can be shown that the lines of constant pressure, also called ISOBARS are parallel to the free surface.
( )[ ] ozx pzgaxap ++ρ+ρ−= (B6)
aI SO BA R S
θ
A Large Open Cylinder A Small Closed Cylinder
θI SO BA R S
a
Po
Po
![Page 7: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/7.jpg)
7
[ ] opgzaxp +ρ+ρ−=
θ
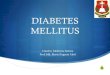
For a simple case of acceleration along the x-axis only, substitute ax=a, az=0 into equation (B6), and we obtain
gatan −=θ
and the inclination of the free surface to the direction of the acceleration is given by
( )[ ] ozx pzgaxap ++ρ+ρ−= (B6)
ax = a
Applications: This type of analysis is important in the design of the tank-truck where brakes may be applied abruptly or a tank car for a railway. It is also important in the design of a fuel system of an airplane
Tank truckAcknowledgement: Wikimedia
Tank car of railwayAcknowledgement: China Railway
![Page 8: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/8.jpg)
8
Worked Example
Equilibrium of Fluid in ROTATION
![Page 9: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/9.jpg)
9
(C) Uniform Spin of Liquid in a Container
When a body of fluid rotates uniformly without relative motion between different elements of the fluid in a container, each particle moves in a circle. Under this condition, the fluid is said to undergo a SOLID-BODY ROTAION
Because an external torque is required to start the motion, the term “Forced Vortex” has also been used. Once steady conditions are established, there is no relative motion between fluid particles and thus no shear forces exist, even in a real fluid.
T=0
ω
T>T1
r
uθ
p
p
p
dθ
r dr
2dr.
rpp∂∂
− 2dr.
rpp∂∂
+
Top-view
ω
r
z
o
zo dzdrz
r 2dr.
rpp∂∂
+
2dz.
zpp∂∂
+
pdr/2dz
Wt2dr.
rpp∂∂
−
2dz.
zpp∂∂
−
Side-view
![Page 10: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/10.jpg)
10
( ) ( )drdzrdrdz2
dpdr2dzd)(drr2dr
rppdzrd
2dr
rpp 2 θρω−=
θ+θ+⎟
⎠⎞
⎜⎝⎛
∂∂
+−θ⎟⎠⎞
⎜⎝⎛
∂∂
−
( ) drrpdrdrr2dr
rppr
2dr
rpp 22ρω−=++⎟
⎠⎞
⎜⎝⎛
∂∂
+−⎟⎠⎞
⎜⎝⎛
∂∂
−
drrpdrdr2dr
rpr.
2dr
rppdrprr.
2dr
rppr 22ρω−=+⎟
⎠⎞
⎜⎝⎛
∂∂
+∂∂
++−∂∂
−
drrdr2dr
rpr.dr
rp 22ρω−=
∂∂
−∂∂
−
The velocity of a typical element of dimension δr, rδθ, dz at a radial distance r from the axis of rotation is
u=uθ=ωr
The acceleration of the same element is given by rω2 in a radially inward direction.
Equation of motion of the fluid element in the radial (r) direction may be written as
Simplifying the above equation leads to
ρω=∂∂ r
rp 2 (C1)
2dr.
rpp∂∂
+pdz
2dr.
rpp∂∂
−
p
p
p
dθ
r dr2dr.
rpp∂∂
− 2dr.
rpp∂∂
+
2dz.
zpp∂∂
−
2dz.
zpp∂∂
+
wt
Radial direction
rω ωr
2dr.
rpp∂∂
+pdz
2dr.
rpp∂∂
−
p
p
p
dθ
r dr2dr.
rpp∂∂
− 2dr.
rpp∂∂
+
2dz.
zpp∂∂
−
2dz.
zpp∂∂
+
wt
( ) ( ) ( ) 022
=θρ−θ⎟⎠⎞
⎜⎝⎛
∂∂
+−θ⎟⎠⎞
⎜⎝⎛
∂∂
− dz.rd.drgrd.drdzzpprd.drdz
zpp
In the z-direction
gzp
ρ−=∂∂ (C2)
Integrate equation (C1) gives
c)z(frp ++ρω=2
22 (C3)
ρω=∂∂ r
rp 2 (C1)
where f(z) is a term containing only z, and c is a constant
1c)r(fgzp ++ρ−=
Integrate equation (C2) gives
(C4)
where f(r) is a term containing only r, and c1 is a constant
2
22 c
2rgzp +ρω+ρ−=
Equations (C3) and (C4) are compatible only if
(C5)
where c2 is a new constant which depends on boundary condition
![Page 11: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/11.jpg)
11
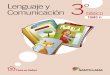
At r=0, z=zo and p = po (reference pressure) (see figure),it can be shown that
c2= po+ρg zo
Therefore, equation (C5) becomes
( ) oo przzgp +ρω+−ρ−= 22
21
(C6)
2
22 c
2rgzp +ρω+ρ−= (C5)
ω
o
zoz
r
po
( ) 22
210 rzzg o ρω+−ρ−=
which is a PARABOLOID OF REVOLUTION (see figure below)
ozrg
z +ω= 22
21
(C7)
To find the equation of the free surface, we let p=po
Therefore, equation (C6) becomes ( ) oo przzgp +ρω+−ρ−= 22
21
(C6)
Zo (i.e. Zmin)
Zmax
R
ISOBARSOriginal fluid level before rotation
Z1
Isobars in Rotating Cylinder with Liquid
![Page 12: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/12.jpg)
12
α=ω
=ω
= tang
rg
rdrdz 22
22
The slope of the liquid level at any radius r is given by
R
z
r
α
r
ozrg
z +ω= 22
21
(C7)
Application: A centrifugal pump and a centrifuge make use of this principle. Here, an enclosed mass of water is whirled rapidly to create the pressure difference between the inlet and outlet.
Centrifugal pump
Acknowledgement: Encyclopedia Britannica Acknowledgement: ITT Corporation
![Page 13: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/13.jpg)
13
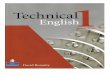
InitialState
Increasing Rotational Speed (Open Container)
ω
1 2 3 4 5 6 7
Tall Cylinder: No spillage of fluid
Rotation stops
InitialState
Increasing Rotational Speed (Open Container)
ω
1 2 3 4 5 6 7Rotation
stops
Short cylinder: Spillage of fluid
![Page 14: ME2134_PPT_Part_2A[1].pdf](https://reader036.pdfslide.net/reader036/viewer/2022071921/55cf9bce550346d033a7729a/html5/thumbnails/14.jpg)
14
InitialState
Increasing Rotational Speed (Closed Container)
ω
1 2 3 4 5 6 7
Short cylinder: Spillage of fluid
Let us go through a simple example





![1 habit 1[1].pdf](https://img.pdfslide.net/doc/110x75/55cf92cb550346f57b999be7/1-habit-11pdf.jpg)
![Tradecoop Pdf 1[1] 1](https://img.pdfslide.net/doc/110x75/5598b3ca1a28abbd608b4605/tradecoop-pdf-11-1.jpg)















![Case_Studies[1] (1).pdf](https://img.pdfslide.net/doc/110x75/55cf8fbc550346703b9f471e/casestudies1-1pdf.jpg)



