Embed Size (px)
Citation preview

Structura mecanismelor Capitolul 1
13
MODULUL II
ELEMENTE DE TEORIA MECANISMELOR
STRUCTURA MECANISMELOR
1.1. NOŢIUNI GENERALE
Datorită inteligenţei omului, încă de la începuturi a observat că,urmărind şi analizând evenimentele ce aveau loc în jurul său poate săgăsească soluţii care să îl ajute pentru a se proteja de stihiile naturii, fie de a-şi depăşi fie propriile capacităţi, fie pe cele ale celor cu care era nevoit să secompare sau înfrunte. De atunci, activitatea umană a fost, este şi va fiorientată întotdeauna spre folosirea legilor naturii pentru obţinerea celor stricnecesare traiului cu un efort cât mai mic, într-un timp cât mai scurt, încondiţii de siguranţă, confort şi eficienţă maxime. Astfel, a obţinut în schimbtimpul necesar pentru a trece de la activităţi pentru necesităţi la activităţispecific umane legate de satisfacerea unor dorinţe. Această activitate sematerializează în cele mai diferite construcţii şi instalaţii, cum ar ficonstrucţiile fixe, dacă le raportăm la un sistem de referinţă, (variatelelocuinţe şi spaţii de asigurare a vieţii cotidiene, podurile, şoselele cuelemente cinematice conexe, cum ar fi tunelurile, viaductele, barajele,construcţii monumentale, etc.) şi realizări mobile, enumerând aici maşinile,cu cele mai diferite forme şi destinaţii, cu ajutorul cărora să poată să-şidepăşească propriile limite şi posibilităţi, aparatele dispozitivele instalaţiilecomplexe, etc. evoluţiile continui fac imposibilă o delimitare şi ierarhizare aacestor complexe realizări umane.
1.2. REPREZENTAREA STRUCTURALĂ
În cadrul mecanicii, utilizarea unor modele mecanice de studiureprezintă un mare avantaj, datorită generalizării soluţiilor găsite, ce se potparticulariza, de la caz la caz. Prin extensie se poate spune că reprezentareastructurală este echivalentul modelului din Mecanică. Reprezentarea

Structura mecanismelor Capitolul 1
14
structurală asigură o largă generalizare a mecanismului studiat, este uşor derealizat mecanismul pentru studiu, permite reprezentări succesive şisecvenţiale, elimină cunoaşterea aprofundată a desenului tehnic pentru aputea înţelege soluţia discutată, oferă specialistului în organe de maşini,numit prescurtat organolog, care v-a pune în aplicare mecanismul realizat omare libertate de manevră, fără a fi necesară o colaborare indispensabilă.
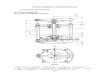
Pentru a exemplifica se consideră exemplul din fig.1.1., în care estereprezentat mecanismul de deschidere a supapelor unui motor cu ardereinternă,
1.3. NOŢIUNI STRUCTURALE DE BAZĂ ALEANALIZEI STRUCTURALE
Un sistem tehnic în cel mai larg înţeles al cuvântului conţine înstructura unul sau mai multe mecanisme care execută fie transmitere sautransformarea de mişcări, fie efectuarea unui lucru mecanic util cum ar fi:modificarea formei geometrice a pieselor pe maşini unelte, a transportării depiese, ansamble şi subansamble, materiale în cadrul unui proces deautomatizare din industria textilă, metalurgică, construcţii de maşini,activităţi portuare etc. Pentru studiul acestui sistem tehnic, acesta sedescompune în părţile sale componente, ce pot fi maşini de acţionare,transmisii, maşini de lucru, etc. Toate aceste părţi componente, la rândul lor
Fig.1.1.

Structura mecanismelor Capitolul 1
15
sunt constituite din mecanisme, care constituie elementul de bază al tuturoracestor sisteme tehnice. La rândul lor aceste mecanisme sunt constituite dinpărţi componente, ce se vor studia în continuare, precum şi condiţiile cetrebuie să le îndeplinească pentru buna lor funcţionare.
1.3.1. ELEMENTE CINEMATICE
Elementul cinematic se defineşte ca partea mobilă a unuimecanism, care legat în continuare cu unul sau mai multe componentemobile sau fixe, prin intermediul unor legături ce restricţionează mişcărilerelative, permite transmiterea în sensul dorit a mişcării şi/sau forţei saumomentului.
După starea şi calităţile fizice, elementele cinematice pot fi clasificateîn mai multe clase, după cum urmează.
Elemente cinematice solideElemente cinematice flexibile.Elemente cinematice lichide.Elemente cinematice gazoase.
Elemente cinematice de natura electrica.ELEMENTE CINEMATICE SOLIDE
1.3.2.1. Reprezentarea structurală a elementelor cinematice şi amişcărilor elementelor conducătoare.
Mişcările elementelor cinematice se reprezintă schematic în teoriamecanismelor, conform STAS 1543-62,
- mişcarea rectilinie într-un sens alternativă;- mişcarea de rotaţie în plan, sau spaţiu;
Fig.1.2.

Structura mecanismelor Capitolul 1
16
- mişcarea de şurub (roto-translaţie) etc.
Reprezentarea are avantajul că permite găsirea sensul de rotaţiea elementului de execuţie, precum şi a celorlalte elemente conduse .
1.3.2.2. Clasificarea elementelor cinematice
După rolul elementelor cinematice acestea pot fi:- elemente cinematice conducătoare,- elemente cinematice conduse,- elemente de execuţie,
- elementul bază, sau baza,- După forma şi numărul legăturilor, putem avea:
- elemente cinematice simple,
Fig.1.3.

Structura mecanismelor Capitolul 1
17
- elemente cinematice complexe,
Pentru aceasta se introduce noţiunea de rangul elementelorcinematice. Prin definiţie, rangul elementelor cinematice este un numărîntreg, notat cu j, egal cu numărul legăturilor pe care acestea le realizează,sau posibil a fi realizate cu elementele cinematice vecine.
Elementele cinematice de rang j<2 se mai numesc şi simple iarelemente cinematicele de rang j >2 se mai numesc elemente cinematicecomplexe.
1.3.3. CUPLE CINEMATICE
1.3.3.1. Aspecte generale
Soluţia tehnică prin care se asigură legarea a două sau maimulte elemente cinematice (corpuri) în scopul limitării selective alibertăţilor de mişcare relativă ale acestora, legare care se poate realiza
Fig.1.4.

Structura mecanismelor Capitolul 1
18
continuu sau periodic, pe o suprafaţă, linie sau punct se numeşte cuplăcinematică.
1.3.3.2. Clasificarea cuplelor cinematice
Un prim criteriu îl constituie soluţia constructivă de realizare alegăturii.
Clasificarea cuplelor cinematice din punct de vedere constructiv seface în două mari grupe:
-cuple cinematice închise;-cuple cinematice deschise;
Clasificarea cuplelorcinematice din pune devedere cinematic,
- cuple cinematice plane;-cuple cinematice spaţiale;
Cupla sferică din spaţiu,reprezintă echivalentul celei de rotaţie alagărului din plan, fig.1.7.
O cuplă cinematică spaţială esteşi cupla şurub-piuliţă, care permiteşurubului o mişcare elicoidală faţă depiuliţă, din care cauză se mai numeşteşi cuplă elicoidală. Datorită posibilităţiide transformare a mişcării de rotaţie încea de translaţie se utilizează pe scară
Fig.1.5.
vx vy vz xw yw zw0 0 0 1 1 1
Fig.1.9.

Structura mecanismelor Capitolul 1
19
largă în realizarea de cricuri şi instalaţii de ridicat sau presat cum se redă înexemplele constructive din anexa I, precum şi a mecanismelor de avans de lamaşinile unelte, sisteme de comandă, de închidere şi deschidere, etc.. Dacăse notează cu p pasul şurubului, reprezentând deplasarea şurubului în lungulaxei la o rotaţie completă a sa, atunci la o rotaţie cu unghiul j a şurubului,deplasarea x a acestuia este obţinută după principiul regulii de trei simple,respectiv a proporţiilor, fiind data de relaţia:
2x pj
p= 1.1.
Deoarece între cei doi parametri ai mişcării spaţiale a şurubului săpiuliţei există o relaţie dată de formula 1.1. din cele două mişcări seconsideră ca o singură libertate a cuplei.
Din punct de vedere al contactului suprafeţelor cuplelor, în practicăîntâlnim:
- cuple inferioare; -cuple superioare;
Cuplele inferioare, la care contactul se realizează prin intermediulunor suprafeţe ce se află în contact direct, ce pot avea diferite formegeometrice de suprafeţe de contact plane, curbe, circulare, profilate,complementare, sau reciproc înfăşurabile, cum este cazul cuplelor filetate.
Cuplele superioare, sunt cele la care contactul suprafeţelor mobile alecuplei are loc teoretic într-un punct definite cuple cu contact punctiform, caexemplu putând considera contatul bilei din fig.1.5. cu plăcile între care esteprinsă, sau cu contact liniar, dacă contactul între cele două suprafeţe are locdupă o linie dreaptă sau curbă.
Clasificarea structurală este cea mai importantă clasificare pentruanaliza structurală a mecanismelor, întrucât cu ajutorul acestor concluziiputem realiza o transpunere matematică a condiţiilor structurale pe care lepoate îndeplini un mecanism pentru a funcţiona în siguranţă. Clasificareastructurală împarte cuplele cinematice în cinci clase, la care se adaugăcuplele de fixare, la care elementelor nu li se permite nici o mişcare relativă.
Generic clasa unei cuple se notează cu ,,m”, având pentru cuplelecinematice, deci cu mişcare valori de la 1 la 5.

Structura mecanismelor Capitolul 1
20
Cupla cinematică de clasa 1 (m=1). Suprimă un grad de libertate alelementului mobil.
Cupla cinematică de clasa a II-a (m=2).
Cupla cinematică de clasa a-III-a (m=3, simbol C3.Cupla cinematică de clasa a IV-a, cu m=4, având ca simbol C4.
Cupla cinematică de clasa a V-a, la care, m=5, fiind codificată cuC5, permite elementelor cinematice supuse legăturii o singură mişcareindependentă.
Un alt caz de cuplă de clasa cinci este cel al cuplelor cinematicefiletate din fig.1.16., în care elementele cinematice execută o mişcare deşurub, constând dintr-o translaţie în lungul axei şurubului vx şi o rotaţie xwîn jurul aceleiaşi axe, considerată în acest caz axa Ox. Deşi cele douăelemente execută două mişcări, aceste nu sunt independente, cupla fiind declasă cinci, deoarece:
2x xpv wp
= 1.2.
Pornind de la definiţia acestui gen de mişcare din mecanică, demişcare elicoidală, cupla se mai numeşte cuplă elicoidală.
Fig.1.14.

Structura mecanismelor Capitolul 1
21
Cupla cinematică de clasa a-VI-a, cu m=6, nu se poate utiliza înstudiul mecanismelor, deoarece aceasta nu permite nici o mişcare relativăelementelor supuse acestor legături. Ea există însă în construcţiile civile şi amaşinilor sub denumirea de „încastrare,, deoarece suprimă elementecinematicelor toate cele 6 grade de libertate.
1.3.4. LANŢURILE CINEMATICE
Prin definiţie numim lanţ cinematic doua sau mai multe elementecinematice legate între ele prin intermediul unor cuple. Lanţul cinematic esteo noţiune abstractă, teoretică, necesară în dezvoltarea teoriei mecanismelor.
1.3.4.1. Clasificarea lanţurile cinematice
Clasificarea lanţurilor cinematice, se poate face pe baza mai multorcriterii, descrise în continuare.
După felul mişcărilor permise:- lanţuri cinematice plane, atunci când, toate elementele
cinematice se mişca în acelaşi plan, sau în plane paralele.- lanţuri cinematice spaţiale, atunci când există elemente
cinematice astfel încât să avem mişcări după toate cele trei axeale spaţiului.
După complexitatea structurală avem- lanţuri cinematice simple, sunt caracterizate de faptul că
elementele cinematice componente au rangul 2j £ , conformexemplelor din fig.1.17. şi fig.1.18.
- lanţuri cinematice complexe, atunci când există cel puţin unelement cinematic pentru care 3j ³ , cum este redat în fig.1.19.
După rangul elementelor cinematice avem:
Fig.1.16.

Structura mecanismelor Capitolul 1
22
- lanţuri cinematice deschise, în care există cel puţin un elementcinematic cu J=1, toate exemplele din fig.1.17., a, elementele 1şi 2, b, elementele 1 şi 3, şi c, elementele 1 şi 5,
exemplele din fig.1.19.a, elementele 1, 4 şi 5, b, elementele 1, 5, 6, şi 8.
- lanţuri cinematice închise, sunt lanţurile cinematice pentru care toateelementele au 2j ³ , exemplele din fig.1.18.
1.3.4.2. Gradul de mobilitate al unui lanţ cinematic
Prin definiţie, gradul de mobilitate al unui lanţ cinematic, este unnumăr întreg, notat cu G, ce reprezintă diferenţa dintre numărul total al
Fig.1.17.
Fig.1.18.
a bFig.1.19.

Structura mecanismelor Capitolul 1
23
libertăţilor elementelor cinematice, notat cu L şi numărul total alrestricţiilor impuse de cuplele cinematice R. Conform definiţiei:
G= L - R 1.3.
L=6 e 1.4.
Pentru cuplele de clasă m, al căror număr total este notat cu cm vomavea un număr total de restricţii Rm, dat de relaţia:
m mR mc= 1.6.
Calculul gradului de libertate G a unui lanţ cinematic spaţial sub forma:
5
1 2 51
6 6 1 2 .... 5mG e mc e c c c= - = - - - -å 1.8.
Deoarece această relaţie este folosită în analiza structurală a lanţurilorcinematice, ea mai este cunoscută sub denumirea de formula structurală alanţurilor cinematice.
1.3.5. NOŢIUNEA DE MECANISM
Utilizând noţiunea de lanţ cinematic, se defineşte mecanismul cafiind orice lanţ cinematic cu un element fix numit bază, şasiu, batiu,suport, etc. În cazul mecanismelor spre deosebire de lanţurile cinematice,cuplele sunt precizate explicit, cuple de clasa 5 de rotaţie sau translaţie,cuple de clasa 4 de rototranslaţie, etc.. În sens larg numim mecanism un grup de elemente cinematicelegate la o baza precum şi între ele cu ajutorul unor cuple cinematiceprecizate explicit. Prin definiţie, numim mecanism motor, mecanismul la care este precizatelementul, sau după caz elementele conducătoare.
1.3.5.1. Clasificarea mecanismelor
- mecanisme plane- mecanisme spaţiale.

Structura mecanismelor Capitolul 1
24
- mecanisme cu cuple cinematice inferioare- mecanisme cu cuple cinematice superioare
În fig.1.21. sunt prezentate diferite variante de mecanisme, toateobţinute din lanţul cinematic cu trei laturi prin modificarea tipului de cuple.
Fig.1.20.

Structura mecanismelor Capitolul 1
25
Mecanismele cu cuple superioare dacă în componenta acestormecanisme există cel puţin o cuplă superioară, cum este cazul mecanismelorcu roţi dinţate, descrise în capitolul 4, marea majoritate a mecanismelor cucame, dezvoltate în capitolul 5.
1.3.5.2. Mobilitatea mecanismelor si condiţia de desmodromie
Dacă în cazul lanţurilor cinematice cu ajutorul formulei structurale secalculează gradul de mobilitate G, în cazul mecanismelor se introducenoţiunea de mobilitatea mecanismului, notată cu M şi având aceiaşisemnificaţie ca în cazul lanţurilor cinematice. Pentru calcul se porneşte de laacelaşi raţionament ca şi în cazul lanţurilor cinematice dată de relaţia 1.3.,mobilitatea rezultând ca diferenţa dintre numărul total al libertăţilor L şi alrestricţiilor R,
M=L-R 1.10.
Fig.1.21.

Structura mecanismelor Capitolul 1
26
. Cu aceste modificări, mobilitatea mecanismului spaţial este dată de relaţia:
5
5 4 3 2 1 61
6 6 5 4 3 2 1mM n mc n c c c c c M= - = - - - - - =å 1.12.
Pentru a preciza faptul că relaţia este pentru cazul spaţial, se poatenota cu 6M - mobilitatea mecanismului spaţial.
Pentru mecanismele plane, raţionând ca în cazul lanţurilor cinematicese obţine relaţia de calcul:
5
3 5 4 34
(6 3) ( 3) 3 2mm
M n m c n c c M=
= - - - = - - =å 1.13.
unde m reprezintă numărul de restricţii induse de o cupla de clasă m, ca şi încazul lanţurilor cinematice. Prin definiţie spunem că un mecanism este desmodrom dacă toateelementele cinematice ale mecanismului au între ele o mişcare relativăunic determinată. În concluzie orice studiu al unui mecanism trebuie să înceapă cu verificareadesmodromiei. Prin definiţie, din punct de vedere matematic un mecanismeste desmodrom dacă mobilitatea sa M este egală cu numărul elementelorcinematice conducătoare.
1.3.5.3. Cuple, elemente cinematice şi mobilităţi pasive structural
1.3.5.4. Cuple multiple
Sunt situaţii în care într-un mecanism se leagă în acelaşi punct teoreticde cuplare doua sau mai multe elemente cinematice. În cazul în care într-ocuplă se leagă mai mult de doua elemente cinematice atunci vorbim de cuplamultipla. În analiza structurala este strict necesar ca să folosim ordinul demultiplicitate al cuplei k în sensul că dacă în cuplă se leagă n elementecinematice, numărul de cuple pe care le introducem în analiza structuralaeste numit ordin de multiplicitate, se notează cu k şi este dat de relaţia:
k=n-1 1.14.

Structura mecanismelor Capitolul 1
27
1.3.5.5. Noţiunea de familia mecanismelor
În aplicaţii s-au observat de multe ori erori în aplicarea formulei decalcul a mobilităţii unui mecanism, chiar dacă s-a ţinut cont de cuplele,elementele şi gradele de prisos în sensul celor descrise în paragraful anterior.
Pentru a rezolva această eroare V. V. Dobrovolschi, a introdusnoţiunea de familie a mecanismelor. Introducerea acestei noţiuni s-a realizatprin generalizarea calculului mobilităţii mecanismelor plane care conform
Fig.1.26.

Structura mecanismelor Capitolul 1
28
relaţiei 1.13. reducea cu trei gradele de libertate ale fiecărui elementcinematic, respectiv deveneau comune cele trei restricţii specifice mişcăriiplane.Prin definiţie numim familia unui mecanism numărul întreg „f” egal cu
numărul restricţiilor comune impuse tuturor elementelor cinematice aleunui mecanism în raport cu un sistem de referinţă unic.
5
1(6 ) ( )f m
fM f n m f c
+= - - -å 1.15.
Considerând cazul mecanismelor plane pentru care f=3 şi înlocuind înrelaţia 1.15., se regăseşte formula de calcul a mecanismelor plane, 1.13.,respectiv:
3 5 43 2M n c c= - - 1.16.
1.3.6. GRUPELE STRUCTURALE
1.3.6.1. Aspecte generale
Grupele structurale ne sunt utile în analiza cinematica şi dinamicapentru că ne da posibilitatea studiului parţial al mecanismului care reprezintăun mare avantaj aşa cum vom vedea. De aceea se mai numesc şi grupecinematice. Din acest motiv este bine să se respecte următoarele observaţiilegate de împărţirea unui mecanism în grupe structurale.
1. Grupele structurale trebuie sa conţină un număr de elemente cat maimic posibil.
2. Grupele structurale trebuie sa fie cat mai simple.3. Împărţirea în grupe structurale se face pornind de la elementul
cinematic conducător şi mergând din aproape în aproape până laelementele cinematice de execuţie.
4. Grupele structurale trebuie sa conţină un număr cat mai mare deelemente, cuple sau puncte cu mişcare cunoscută.
5. În formarea grupelor structurale trebuie sa avem în vedere un aspectdeosebit de important legat de posibilitatea de echivalare structurală a

Structura mecanismelor Capitolul 1
29
cuplei cinematice de clasa 4 de rototranslaţie cu un lanţ cinematic cu douăelemente cinematice şi trei cuple de clasa 5, cum este redat în fig.1.35.
Acesta este cazul suprapunerii celor două mişcări permise de cupladin B dintre elementele 1 şi 3. Conform figurii fig.1.35.b, este redat cazulîn care se separă cele două componente ale cuplei, prin introducereapatinei ca element cinematic, separat, care se leagă prin cele două cupleseparate de data aceasta, constând într-o cuplă de translaţie din B şi unade rotaţie din C. Conform detaliilor geometrice cele două cuple realizeazăaceleaşi funcţii, respectiv modificarea distanţei x şi a unghiului a metodapurtând numele de metoda separării cuplei de clasă patru.
1.3.6.2. Clasificarea grupelor structurale
Grupele structurale se împart după mai multe criterii, astfel:1. După numărul elementelor cinematice componente n, careformează în cazul unei grupe un contur închis, respectiv după rangulmaxim al elementelor componente se împart în clase. Prin definiţieclasa unei grupe, este un număr întreg, egal cu numărulelementelor ce formează laturilor unui contur închis, respectivrangul maxim al elementelor ce compun grupa, dacă nu existăcontururi închise. Funcţie de acest număr grupele cinematice poartădenumiri specifice, astfel:
- pentru n=2 avem grupele cinematice de clasă doi, numite diadedin tabelul cu diadele de mai jos;
- pentru n=3 avem grupele cinematice de clasa 3, numite şitriade (fig.1.36.a şi b, datorită rangului maxim j=3);
- pentru n=4 avem grupele cinematice de clasa 4 numite şitetrade (fig.1.36.c);
- pentru n=5 avem grupele cinematice de clasa 5 sau pentade.
2. După numărul cuplelor posibile de legătura, grupele structuralese împart în ordine. Ordinul este un număr întreg egal cunumărul cuplelor posibile a se lega la alte mecanisme.
a b cFig.1.36.

Structura mecanismelor Capitolul 1
30
3. În cazul aceleiaşi grupe şi ordin grupele structurale se clasificăîn aspecte, în funcţie de tipul cuplelor ce o compun. Deoarece în aplicaţiileuzuale vom folosi numai diade se vor analiza doar aspectele acestei grupe.
Exemple semnificative, cu cuplele separate precum şi cu cuplesuprapuse şi mecanismele reprezentative din care provin sunt redate întabelul cu diadele de mai jos.
2. ANALIZA CINEMATICĂ AMECANISMELOR CU BAREARTICULATE
În cadrul analizei cinematice se studiază cei cele trei mărimi conformrezultatelor de la mecanică, denumiţi parametrii cinematici. Prin parametriicinematici, se înţeleg cele trei mărimi cu ajutorul cărora definim mişcarea însensul modificării poziţiei geometrice a unui corp şi a unor distanţe relativedintre aceste corpuri, precum şi a modului de variaţie a acestor distanţerespectiv, spaţiul parcurs, viteza şi acceleraţie, prin prisma transformărilor ceau loc în timpul funcţionarii mecanismului. În lucrare se va dezvolta metodaanalitica. Metoda analitica este cea mai evoluata, folosită pentru calcululparametrilor cinematici pe baza proiecţiilor poziţiilor punctelor pe sistemede axe, urmată de rezolvarea analitică a ecuaţiilor obţinute.
2.1. CALCULUL PARAMETRILOR CINEMATICIPENTRU MECANISME PLANE CU BARE
UTILIZÂND METODA GRAFOANALITICĂ
2.1.1. REPREZENTAREA LA SCARĂ A MECANISMELOR ŞI ATRAIECTORIILOR ELEMENTELOR CINEMATICE
Desigur pentru a putea rezolva problemele pe cale grafică problemelede analiză cinematică, mai întâi trebuie să se realizeze reproducerea la scarăa mecanismului existent studiat sau a celui ce se proiectează. Pentru a serealiza acest lucru trebuie să se ţină seama de mai multe aspecte. În primulrând pentru a se desena la scară mecanismul trebuie mai întâi să se aleagă oscară a lungimilor, notată cu kl. Aceasta este o scară cu valori aleatoare, ce

Structura mecanismelor Capitolul 1
31
se aleg pornind de la dimensiunile reale şi de la suprafaţa de desen, deoarecereprezentarea structurală nu este un desen tehnic nu este obligatorierespectarea valorilor scărilor standardizate din desenul tehnic. Avândcunoscută lungimea lAM=l1 din fig.2.1 pentru a trasa grafic la scara kl aleasăse obţine valoarea din desen:
AM=l1 ×kl 2.1.
Cum în desen se lucrează în mm, rezultă că unitatea de măsură a scăriitrebuie aleasă în funcţie de unitatea de lungime dimensiunii reale aelementului cinematic. Dacă se notează cu [L] unitatea de măsură aelementului cinematic real, atunci:
[kl]=[ ][ ]mmL
2.2.
Pentru stabilirea traiectoriilor unor puncte cu rol funcţional alelementului cinematic (cum ar fi cuplele de legătură) se folosescproprietăţile mişcărilor particulare simple studiate la mecanică, în special cuajutorul epurei vitezelor şi acceleraţiilor [DID04].
2.2. CALCULUL PARAMETRILOR CINEMATICI AIMECANISMELOR PLANE CU BARE ARTICULATEFOLOSIND METODA ANALITICĂ A FUNCŢIEI DETRANSFER,
2.2.1. ASPECTE GENERALE
Cum s-a mai spus, metodele grafice de analiză cinematică amecanismelor sunt intuitive şi expeditive, dar rămân tributare preciziei şicum s-a văzut construirea planurilor vitezelor şi acceleraţiilor trebuie făcutăpentru fiecare poziţie a elementului conducător. Pentru a realiza o mărire apreciziei de evaluare a parametrilor cinematici ai mecanismelor precum şipentru o aprofundare a calculului se impune folosirea metodelor analitice. Înliteratura de specialitate sunt diferite metode analitice, dar o metodă foartegenerală şi cu o sferă de aplicabilitate deosebit de largă este metoda funcţiilede transmitere sau de transfer.
Fundamentul metodei constă în a se obţine acele funcţii care stabilesco legătură între parametrii cinematici ai elementului conducător sau a

Structura mecanismelor Capitolul 1
32
elementelor conducătoare, când este cazul şi cei ai unei element cinematicconsiderat condus, ce poate fi de execuţie sau element conducător înurmătoarea etapă de analiză, cum se v-a vedea în continuare. Pentru o mailargă generalizare a metodei, se introduce noţiunea de coordonatăgeneralizată, notată cu q1, pentru elementul cinematic conducător, respectivcu qk, pentru cel condus sau de execuţie. Aceste coordonate generalizată potfi deplasări unghiulare sau deplasări liniare, după cum elementele 1 şi kexecută mişcări de rotaţie sau de translaţie.
Se defineşte astfel, funcţia de transmitere de ordinul zero, saufuncţia de poziţie, sau funcţia primară ca fiind funcţia care stabileştelegătura între parametrul qt care fixează poziţia elementului condus k şiparametrul q1, o coordonată independentă care fixează poziţia elementuluiconducător 1.
Această funcţie poate fi pusă sub forma :
( )1, 0k k kR q q Rº = 2.84.
ce este specifică unui anumit mecanism. Pe lângă cele două coordonategeneralizate în relaţie mai intră ca nişte constante lungimile elementelormecanismului, sau anumite unghiuri constante. Derivând 2.84. în raport cutimpul, având în vedere că funcţia de transfer depinde de timp prinintermediul coordonatelor generalizate 1 1( ) ( );t k k tq q q q= =
'1k kq R q= ×& & 2.85.
în care cu 'kR s-a notat expresia:
' 1
k
kk
k
RqR Rq
¶¶
= -¶¶
2.86.
ce poartă numele de funcţie de transmitere de ordinul întâi, care stabileşte ocorelaţie între vitezele generalizate, ale elementului condus şi a celuiconducător. Pentru simplificarea scrierii s-a folosit scrierea prescurtată cuajutorul punctelor a derivatelor absolute în raport cu timpul, respectiv:

Structura mecanismelor Capitolul 1
33
kk
dqqdt
=& ; 11
dqqdt
=& 2.87.
Derivând în raport cu timpul relaţia 2.85. se obţine:
'' 2 '1 1k k kq R q R q= +&& & && 2.88.
în care s-au folosit notaţiile specifice teoriei mecanismelor (vezi cursul inextenso)
Expresia ''kR este funcţia de transmitere de ordinul doi şi aşa cum se
poate constata din 2.90, alături de funcţia de transmitere de ordinul întâi Rk',stabileşte legătura între acceleraţia generalizată kq&& a elementului condus k şiviteza generalizată 1q& , respectiv acceleraţia 1q&& ale elementului conducător1. Pentru obţinerea funcţiei de transfer, se înlocuiesc elementele cinematicecu vectorii echivalenţi, care unesc cuplele fiecărui element, după care seproiectează aceşti vectori pe axele unui sistem de referinţă plan unitar şi alesconvenabil. Pentru a scrie cât mai uşor ecuaţiile de proiecţii, prin relaţiiunitare, indiferent de mecanism, unghiul cu care definim poziţia vectorilor înraport cu axa Ox, sunt unghiuri orientate în sens trigonometric conformfigurii. Folosind aceasta marcare a unghiului atunci ecuaţia vectorială pentruun lanţ de vectori ai unui mecanism oarecare:
1 2 31
... 0, 0n
n kl l l l l+ + + + = =å 2.91.
devin cu ajutorul proiecţiilor pe axele planului:
1 1 2 2
1 1 2 2
: cos cos ... cos 0: sin sin ... sin 0
n n
n n
Ox l l lOy l l l
j j jj j j
+ + + =ìí + + + =î
2.92.
Din cele N sisteme de ecuaţii ce se pot scrie doar pentru N-1 ecuaţiilevor fi independente. Deci, dacă notăm cu K numărul de cicluri independentede vectori, atunci:
1K N= - 2.93.

Structura mecanismelor Capitolul 1
34
Conform [VIA82], pentru calculul lui K, se poate utiliza relaţia:
5
1k
kK c n
== -å 2.94.
în care kc , reprezintă numărul de cuple de clasă k, iar n numărul de elementemobile.
2.2.2. ANALIZA CINEMATICĂ A MECANISMULUI PATRULATER CU CUPLE DE ROTAŢIE
La mecanismul patrulater din fig.2.9. numărul de cicluri independenteK, pe baza relaţiei 2.93., este K = 4 - 3 = 1, deoarece sunt 4 cuple de clasă 5şi 3 elemente cinematice mobile. Se consideră că elementul AB esteconducător 1 (q1 = 1j ), iar elementul BC este condus deci qk = 3j .
2.2.3. ANALIZA CINEMATICĂ A MECANISMULUIBIELĂ-MANIVELĂ
Mecanismul bielă manivelă, sau manivelă piston reprezentat înfig.2.9. este mecanismul utilizat pentru realizarea motoarelor cu ardereinternă, atunci când elementul conducător este pistonul, respectiv piatra deculisă, sau pentru compresoarele de aer cu piston, atunci când elementulconducător este manivela 1. Mecanismul în primul caz de utilizaretransformă o de translaţie într-o mişcare de rotaţie, a manivelei şi invers încel de al doilea caz. Mecanismul având două elemente cinematice c5=2,c4=1 şi fiind plan M3=3n-2c5-c4=1, deci este desmodrom, respectiv
calculând relaţia 2.94. se obţine,5
1k
kK c n
== -å =3-2=1, deci mecanismul are
un singur ciclu. Folosind notaţiile din figura 2.10. şi elementele departicularitate, respectiv 0 0
3 3270 , 180j j= = , iar elementul 3, se notează cue şi poartă numele de excentricitate sau dezaxare,
2.2.4. ANALIZA CINEMATICĂ A MECANISMULUIDE ŞEPING
Mecanismul transformă o mişcare de rotaţie uniformă a manivelei 1,în una de translaţie a glisierei fixe 5. Mecanismul având n=5 elementecinematice c5=7, c4=0, deoarece s-a înlocuit cupla de clasă 4, cu două cuple

Structura mecanismelor Capitolul 1
35
de clasă 5 şi un element cinematic 2 şi fiind plan M3= 3n - 2c5 - c4=1, decieste desmodrom. Înlocuind aceste valori în relaţia 2.94. se obţine,
5
1k
kK c n
== -å = 7 – 5 = 2,
deci mecanismul are două cicluri independente.este desmodrom. Din cele trei cicluri independente, I- ABCA, II- CDEHC şiIII- ABDEHA, se vor utiliza primele două.
BIBLIOGRAFIE
1. ATANASIU, M. -Mecanică, Ed. Didactică şi Pedagogică, Bucureşti, 19732. BĂLAN Şt. - Lecţii complementare de mecanică, Ed. Didactică şi Pedagogică,
Bucureşti, 1973.3. CEAUŞU, V., ENESCU, N., CEAUŞU, F. - Culegere de probleme de mecanică,
Lito. , I.P.B. Bucureşti, 1982.4. CEAUŞU, V., ENESCU, N., - Probleme de mecanică, Statică, Cinematică.
Corifeu, Bucureşti, 2002.5. DASCĂLU, D., ONCICA, V., - Mecanică şi rezistenţa materialelor. Ed.
Academiei navale ,,Mircea cel Bătrân,,. Constanţa 2002.6. DASCĂLU, D., Mecanică pentru ofiţerii de marină. Ed. PRINTECH,
BUCUREŞTI, 20047. Iacob, C., - Mecanica teoretică, Ed. Didactică şi Pedagogică, Bucureşti, 1980.8. IOACHIMESCU, A.- Mecanica raţională, Biblioteca ,, Gazetei matematice,,
Bucureşti 1947.9. MANGERON, D., IRIMINCIUC, N. - Mecanica rigidelor cu aplicaţie în
inginerie, Ed. Tehnică, Bucureşti 1978.10. MAIER, V. - Mecanica navei, Ed. Didactică şi Pedagogică, Bucureşti, 1995.11. OLARIU, V., SIMA, R., ACHIRILOAIE, V.- Mecanica, Ed. Tehnică, Bucureşti
1982.12. ONICESCU, O.- Mecanica, Ed. Tehnică, Bucureşti 1969.13. PLĂCINŢEANU, I.I. – Mecanica vectorială şi analitică, Ed. Tehnică, Bucureşti
1958.14. PRICOP, M., CARP, V. –Probleme de mecanică. Ed. Academiei navale ,,Mircea
cel Bătrân,,. Constanţa 2002.15. RĂDOI, M., DECIU, E., –Mecanica, Ed. Didactică şi Pedagogică, Bucureşti,
1981.16. RIPIANU, A., POPESCU, P., BĂLAN, B. – Mecanica tehnică, Ed. Didactică şi
Pedagogică, Bucureşti, 1979.

Structura mecanismelor Capitolul 1
36
17. SILAŞ, GH. GROŞIANU, I. – Mecanica Ed. Didactică şi Pedagogică, Bucureşti,1981.
18. ROŞCA, I., – Mecanica pentru ingineri, Ed. Matrix rom, Bucureşti, 1998.19. SARIAN, M., ş.a. –Probleme de mecanică. Ed. Didactică şi Pedagogică,
Bucureşti, 1981.20. VÂLCOVICI, V., BĂLAN, Şt., VOINEA, R. – Mecanica teoretică, Ed. Tehnică,
Bucureşti 1974.21. VOICULESCU, D., ENESCU, N., HAŞEGANU, E. –Mecanică şi rezistenţa
materialelor. Lito. , I.P.B. Bucureşti, 1984.22. VOINAROSKI, R. – Mecanica teoretică, Ed. Didactică şi Pedagogică, Bucureşti,
1968.23. VOINEA, R., ATANASIU, M. –Metode analitice noi în teoria mecanismelor.
Ed. Tehnică, Bucureşti 1964.24. VOINEA, R., VOICULESCU, D., SIMION, P., Fl., –Introducere în mecanica
solidului cu aplicaţii în inginerie, Ed. Academiei R.S.R.1989.25. VOINEA, R., VOICULESCU, D., CEAUŞU, V. – Mecanica, Ed. Didactică şi
Pedagogică, Bucureşti, 1968.
Capitolul 4
MECANISME CU ROŢI DINŢATE
4.1. SCURT ISTORIC
4.3. ANGRENAJE EVOLVENTICE
4.3.1. ELEMENTE GENERALE
Dacă în istoria construcţiei de maşini angrenajele au o vechime depeste două milenii, angrenajele evolventice, sau mecanismele cu roţi dinţateevolventice, care s-au impus în acest domeniu şi care vor fi studiate încontinuare au o vechime de numai două secole iar utilizarea lor industrialămai puţin de un secol [JVD1889]. Aceste mecanisme cu roţi dinţateevolventice actuale, atât de răspândite şi perfecţionate, mai sunt cunoscute în

Structura mecanismelor Capitolul 1
37
literatura tehnică sub numele de angrenaje. Acestea au înlocuit mai vechileangrenaje (mecanisme) cicloidale cu bolţuri sau roţi, care au fost prezentatepe scurt în capitolul anterior.
Prin definiţie angrenajul evolventic, cunoscut, cum s-a mai afirmatanterior, datorit largii utilizări şi sub denumirea generică de angrenaj, esteun mecanism care serveşte la transmiterea directă şi forţată de la un arboreconducător la un arbore condus, a unei mişcări şi a unei forţe sau moment.
Elementele cinematice care stau la baza acestor mecanisme, realizândfuncţia de bază, sunt roţile dinţate.
Dintre avantajele angrenajelor, care au favorizat dezvoltarea lor atâtde amplă se pot enumera :
-asigurarea unui raport de transmisie constant conform calculelor(excepţie angrenajelor eliptice şi cele speciale);
-stabilitate a raportului de transmitere odată cu variaţi distanţei dintreaxe;
-durabilitate foarte bună;-siguranţă în exploatare;-dimensiuni şi gabarit relative redus;-randament ridicat ( ajungând până la 0,995);-transmiterea de puteri într-un domeniu larg de viteze şi rapoarte de
transmitere;Dezavantajele angrenajelor sunt:-necesitatea unei precizii înalte de execuţie şi montaj ce implică
tehnologii de prelucrare relativ scumpe şi maşini de prelucrare specializatesau în unele cazuri speciale;
-funcţionarea zgomotoasă odată cu creşterea vitezelor şi a durităţiiflancurilor;
-restricţionarea rapoartelor de transmitere datorită necesităţi canumărul de dinţi ai fiecărei roţi să fie un număr întreg;
-uzuri disproporţionate între flancurile celor două roţi datoritănumărului de contacte diferit pentru aceiaşi durată de funcţionare;
-sisteme de montaj destul de complexe şi precise;
4.3.2. CLASIFICAREA ANGRENAJELOR
Datorită dezvoltării şi perfecţionării continue a angrenajelor, acesteasau diversificat şi în consecinţă, studiul lor presupune necesitatea clasificăriilor după diverse criterii, pentru ca specialiştii să poată comunica între ei.
Pentru a înţelege mai bine aceste clasificări, au fost redate spaţial,utilizând o reprezentare simplificată, în figurile de mai jos clasele principale

Structura mecanismelor Capitolul 1
38
de mecanisme cu roţi dinţate. Aceste mecanisme vor fi analizate detaliatulterior.
a) după poziţia relativă a axelor celor două roţi aflate în angrenare,angrenajele pot fi:
- angrenaje cu axe paralele (fig.4.4.);- angrenaje cu axe concurente (fig.4.5.);- angrenaje cu axe încrucişate (fig.4.6.);
b) după forma geometrică a suprafeţelor de dispunere suprafeţelordanturate, angrenajele pot fi:
- cilindrice (fig.4.4.; fig.4.7. şi fig.4.8.);- conice (fig.4.5.);- eliptice fig.4.9.- alte suprafeţe (plane, cremalierele din fig.4.7.; suprafeţe riglate de
revoluţie, în cazul roţilor melcate şi fig.4.6. b şi c, sau a melcului globoidal,fig.4.6. c);
c) după modul de dispunere a axei de simetrie a dinţilor roţilorcomponente, în raport cu axele de rotaţie, angrenajele pot fi:
- cu dinţi simpli, care la rândul lor pot fi:
- cu dinţi drepţi, când sunt paraleli cu axa de rotaţie(fig.4.4.a; fig.4.5. a; fig.4.6.a);
- cu dinţi înclinaţi, când formează un unghi constant cu axa derotaţie (fig.4.4.b; fig.4.5.b; fig.4.6.b);
- cu dinţi curbi, când formează un unghi variabil cu axa de rotaţie(fig.4.5.c).
- cu dinţi compuşi, care la rândul lor pot fi:
- cu dinţi în V (fig.4.4., c);- cu dinţi în W etc.
d) după profilul dinţilor angrenajele pot fi:
- evolventice (profilul este evolventic);

Structura mecanismelor Capitolul 1
39
- cicloidale (profilul este o cicloidă, descrise anterior);- arc de cerc (profilul este un arc de cerc);- speciale (profilul este o altă curbă);
e) după modul de mişcare a axelor roţilor, angrenajele pot fi:
- ordinare (la care axele sunt fixe) (fig.4.4., ...., 4.6.);- planetare (la care o axă este mobilă) (fig.4.8.).
În general angrenajele simple au gradul de mobilitate unu (M =1).Dacă un sistem de angrenaje are gradul de mobilitate M = 2 sau mai
mare, se numesc diferenţiale.Prin definiţie raportul de transmitere i12 al unui angrenaj este raportul
dintre viteza unghiulară 1w a roţii dinţate conducătoare 1 şi viteza unghiulară
2w a roţii dinţate conduse 2, adică:
121
2
1
2
nin
ww
= = 4.1.
e) Funcţie de valoarea raportului de transmitere 12i , numită în teoriamecanismelor (funcţia de transmitere de ordinul întâi), angrenajele pot fi:
- cu raport de transmitere constant 12i ct= (fig.4.4., 4,5., 4.6., 4.7.,4.8.a.);- cu raport de transmitere variabil ( 12i ct¹ ) ; angrenaje eliptice, etc.fig.4.8.b.

Structura mecanismelor Capitolul 1
40
a bFig.4.7.

Structura mecanismelor Capitolul 1
41
f) Tot funcţie de valoarea raportului de transmitere i12, angrenajele semai pot clasifică astfel:
- dacă 12i > 1, angrenajul este demultiplicator;- dacă i12 < 1, angrenajul este multiplicator.
Angrenajele cu raport de transmitere instantaneu constant, i12= ct., suntcele mai răspândite, motiv pentru care li se va acorda o atenţie deosebită.
a
1w2w
bFig .4.8.

Structura mecanismelor Capitolul 1
42
4.3.3.GEOMETRIA DINŢILOR ROŢILOR DINŢATECILINDRICE CU DANTURĂ DREAPTĂ
Profilul unui dinte al unei danturi are caracteristic cele două flancurisimetrice care limitează grosimea dintelui şi o suprafaţă circulară caredelimitează înălţimea dintelui.
4.3.3.1. Profilul evolventic al angrenajelor cilindrice cu dinţi drepţi
Conform celor prezentate, se defineşte (Fig.4.9.) pentru angrenajelecilindrice cu dantură dreaptă, profilul evolventic, ca locul geometric, al unuipunct fix de pe o dreaptă, numită generatoare, care se rostogoleşte fărălunecare pe un cerc, numit cerc de bază.
Diametrul cercului de bază se notează cu db . Se consideră A punctulfix de pe dreapta generatoare. Prin rotirea dreptei generatoare pe arcul decerc din dreapta, cu unghiul a , se obţine profilul evolventic, numit maiexact după modul de generare profilul evolventic de cerc, pe care se găseştepunctul B, corespunzător unghiului dat. Dacă se roteşte dreapta generatoareîn sens contrar, atunci se va genera un profil simetric cu primul, faţă dedreapta OA.
Calculul functiei involuta de unghi α
inv α = ev α = tg α - α 4.6.
Considerând diametrul d al cercului pe care se află punctul B, ca unpunct curent de pe evolvent se mai obţine o relaţie utilă
d =d b /cos α 4.7.
4.3.3.2. Geometria dintelui unei roţi cu dantură exterioară
În urma perfecţionării continui atât a tehnologiilor de prelucrare cât şia generalizării utilizării industriale a angrenării evoventice, a apărutnecesitatea asigurării interschimbabilităţii depline a roţilor dinţate, reducereanumărului de scule prin standardizarea elementelor geometrice ale profiluluidintelui. Astfel toate danturile cilindrice sunt definite cu ajutorul uneicremaliere, numită cremalieră de referinţă.
Acestea reprezintă o roată dinţată cu raza tinzând către infinit.

Structura mecanismelor Capitolul 1
43
Conjugata cremalierei de referinţă, conform fig.4.10. se defineşte cafiind cremaliera generatoare.
Dreapta MN, poartă numele de linia de referinţă sau axa cremalierei,fiind o dreaptă particulară ce se bucură de proprietatea că grosimea dinteluicremalierei de referinţă, segmentul NP, este egal cu grosimea golului NM.Segmentul MP se notează cu p şi poartă numele de pasul danturii. Se maipoate observa o proprietate deosebit de importantă, că în cazul cremaliereipasul este constant pe toată înălţimea cremalierei.
Pasul danturii distanţa dintre intersecţiile a două flancuri succesiveale cremalierei de referinţă cu linia de referinţă.
Cercul de divizare al roţii dinţate, având raza Rd şi diametru dd ,numite raza respectiv diametru cercului de divizare,
Pentru o mai uşoară standardizare a geometriei angrenajelor seintroduce noţiunea de modulul angrenajului notată cu m, dată de relaţia dedefiniţie:
pmp
= 4.8.
Pentru a exprima valoric unitar dimensiunile mărimilor legate deînălţimea dintelui în funcţie de modulul danturii se introduce f, ce poartănumele de coeficient de înălţime a capului dintelui, având valoarea:
- f =1, pentru dantura normală; - f =0,85 pentru dantura scurtată, pentru a obţine dinţi mai scunzi
- înălţimea capului dintelui a,
- înălţimea piciorului dintelui b,
b=1,25m 4.12.
- înălţimea dintelui h este dată de relaţia geometrică evidentă:
h = a +b = (2f + 0w )m 4.13.
Raza de racordare r
r =3,38 m 4.15.

Structura mecanismelor Capitolul 1
44
4.3.4. GEOMETRIA ROŢILOR DINŢATE CILINDRICE CUDANTURĂ DREAPTĂ
4.3.4.1. Geometria roţilor dinţate cilindrice cu dantură dreaptă cuangrenare exterioară
Diametrul cercului de divizare dd
Numărul de dinţi z
p dd=z pd 4.17.
Diametrul cercului exterior de
de=m(z+2)=2Re 4.21.
Diametrul cercului interior di
di =m(z - 2,5) 4.23.
Grosimea dintelui pe un cerc oarecare sd
Grosimea golului pe un cerc oarecare gd
4.3.4.2. Geometria roţilor dinţate cilindrice cu dantură dreaptă cuangrenare interioară
După cum se poate vedeadin fig.4.12., care reprezintăprofilul unei roţi cu danturăinterioară, se remarcă o anumităsimilitudine cu cea exterioară,deosebirea fiind dată de faptul că,de această dată diametrul interiordi, respectiv raza interioară Ri,sunt mai mari decât celeexterioare. Deoarece profilul este
Fig 4.12.

Structura mecanismelor Capitolul 1
45
generat similar cu cele exterioare, atunci elementele geometrice definitoriivor avea expresiile identice.
Astfel, raza cercului de divizare a roţii cu dantură interioară este datăde relaţia:
R/d= 2
mz 4.26.
Raza cercului interior, devine mai mare de această dată, decât cea adiametrului de divizare, fiind dată de relaţia geometrică evidentă:
R/i= 2
mz + b=m(2z +f+w0)=m(
2z +1,25) 4.27.
iar pentru cercul exterior, efectul este contrar deoarece acesta cum rezultădin figura 4.13.
R/e= 2
mz –a = m(2z - f)=m(
2z -1) 4.28.
4.3.5. GEOMETRIA ANGRENAJELOR CILINDRICE CUDANTURĂ DREAPTĂ
După cum reiese din fig.4.14., în cazul unei angrenări a două sau maimulte roţi dinţate cilindrice cu dantură dreaptă, pot angrena reciproc, dacă
axele lor sunt paralele, iar profiluldanturilor sunt complementare,asigurând condiţia de angrenare,respectiv să aibă aceiaşi cremalieră dereferinţă şi în consecinţă să fiecaracterizate de acelaşi modul. Pentrucalculul geometric al angrenajului se areîn vedere această condiţie deosebit deimportantă şi strict obligatorie, că celedouă roţi dinţate au acelaşi modul şiaceeaşi cremalieră de referinţă. Pentrudefinirea mărimilor caracteristice aleroţilor în angrenare, fiecare roată poartă
un număr de ordine, notat simbolic cu i. Acest număr însoţeşte ca indiceinferior fiecare mărimea caracteristică a roţii respective.
Fig. 4.14.

Structura mecanismelor Capitolul 1
46
Polul angrenării P
Polul angrenării, se notează cu P şi reprezintă punctul de intersecţiedintre dreapta 1 2O O , ce uneşte centrele de rotaţie al celor două roţi şitangenta comună la cele două cercuri de bază ale roţilor notate cu K1 şirespectiv K2. Deoarece cele două centre ale roţilor precum şi cercurile debază rămân fixe, atunci rezultă că polul angrenării P, se bucură deproprietatea că reprezintă un punct fix al angrenajului, respectiv uninvariant.
Diametrul cercurilor de rostogolire dri
Aşa cum rezultă din figură, punctul P mai reprezintă şi punctul detangentă al celor doi cilindrii care se rostogolesc reciproc în timpulangrenării. Aceste cercuri poartă numele de cercuri de rostogolire,diametrele lor fiind notate cu dr1, respectiv dr2, iar razele corespunzătoare, cuRr1, respectiv Rr2.
11 1 11
22 2 22
2
2
r d
r d
mzR R x m
mzR R x m
x
x
ìïïíïïî
= + = +
= + = +4.52.
Unghiul de angrenare a
Unghiul de angrenare a , reprezintă pentru un angrenaj, unghiulpe care tangenta comună la cele două cercuri de bază K1 K2, îl face cu axacentrelor 1 2O O . Acesta mai poartă numele de unghi de presiune, deoarecereprezintă unghiul după care este dispusă componenta normală a forţei decontact între cele două flancuri ale dinţilor aflaţi în contact. Pentruangrenajele normale acest unghi se notează cu 0 20oa = , fiind unghiul deangrenare normal.
Antraxa angrenajului A12
Distanţa dintre centrele de rotaţie ale celor două roţi 1 2O O , poartănumele de distanţă axială sau antraxa angrenajului sau mai simpluantraxă. Aceasta se notează cu Amn, în care n şi m reprezintă numărul curental roţilor ce formează angrenajul. În cazul de faţă 12A . Pentru angrenajele

Structura mecanismelor Capitolul 1
47
normale, aceasta poartă suplimentar indicele 0, deci A012. Pentru calcul,rezultă din desen relaţia geometrică evident că:
12 1 2A O P O P= + 4.65.
Dar, prin înlocuirea valorilor celor două segmente cu relaţiile razelorcercurilor de rostogolire se obţine:
1 212 1 2 1 1 2 2 1 2
( ) ( )2r r d d
m z zA R R R x R x m x x+
= + = + + + = + + 4.66.
121 2
0( )A
2m z z-
= 4.78.
respectiv funcţie de diametrele cercurilor de divizare, o altă relaţie de calculfrecvent folosită ca şi în cazul celor exterioare este:
121 2
0A2
d dd d-= 4.79.
Raportul de transmitere i
Conform relaţiilor stabilite de R. Willis, raportul de transmitere al unuiangrenaj se defineşte ca raportul dintre turaţiile roţii conduse şi a roţiiconducătoare. Raportul de transmitere se notează pentru cele două roţi cuimn, în care m şi n sunt numerele de ordine al celor două roţi ce formeazăangrenajul studiat. Pornind de la această definiţie, pentru angrenajul studiat,format de roţile 1 şi respectiv 2, raportul de transmitere i12 , conformrelaţiei 4.1. este:
1 112
2 2
nin
ww
= = 4.86.
în care 1w reprezintă viteza unghiulară a roţii dinţate conducătoare 1 şi 2w
viteza unghiulară a roţii dinţate conduse 2. Având în vedere că 1 12 nw p= ,respectiv 2 22 nw p= , în care n1 şi n2 reprezintă numărul de rotaţii ale celor

Structura mecanismelor Capitolul 1
48
două roţi. Această relaţie poartă denumire de legea fundamentală aangrenajelor.
2 21 2 212
2 1 1 1 1
b dr
r b d
R RR ziR R R z
ww
= = = = = 4.90.
Această relaţie demonstrează o proprietate deosebit de importantă atransmisiilor dinţate evolventice, faţă de cele cicloidale, care de fapt le-aimpus pe piaţă, respectiv constanţa raportului de transmisie cu variaţiiledistanţei dintre axe.
4.3.6. DEPLASAREA DE PROFIL, O METODĂ DE OPTIMIZAREA GEOMETRIEI ANGRENAJELOR
Dacă la început, odată cu impunerea angrenajului evolventei s-aîncercat îmbunătăţirea performanţelor acestor angrenaje prin modificarea fiea unghiului de angrenare fie a înălţimii capului sau piciorului dintelui,începând cu 1908, inginerul elveţian din Zürich, Max Magg, întemeietorulcunoscutei firme Mag de prelucrare a angrenajelor a pus la punct acestprocedeu de optimizare a transmisiilor prin corijarea danturii. Aceastăcorijare a danturii se realizează, aşa după cum s-a mai prezentat şi înconformitate cu teoriile lui Maag:
a) prin deplasarea profilului de referinţă;b) prin modificarea unghiului de angrenare;Conform acestei teorii putem întâlni trei situaţii:
I. Dacă linia de referinţă a cremalierei M-M este tangentă la cercul dedivizare, pentru care golul şi plinul au aceiaşi dimensiune danturase numeşte normală sau necorijată sau dantură zero, mărimilecaracteristice fiind precizate prin indicele ,,0”.
II. Dacă linia de referinţa a cremalierei se aşează la o distanţă decorijare x faţă de cercul de divizare şi în afara sa, rezultă o danturăcu deplasare pozitivă.
III. Dacă linia de referinţă se deplasează în interiorul cercului dedivizare cu distanţă de corijare, atunci dantura este cu deplasarenegativă.Pentru a putea sistematiza valorile deplasărilor de profil ale căror
efecte sunt de multe ori contradictorii exprimarea valorică a deplasării deprofil se exprimă cu ajutorul modulului cu relaţia 4.14.

Structura mecanismelor Capitolul 1
49
x mx= 4.96.
în care x poartă numele de coeficientului de plasării de profil. Aceastămărime poate avea fie valori pozitive, în cazul I şi negative pentru cazul II.
Din punct de vedere al calculului elementelor geometrice relaţiile suntredate în paragraful 4.3.4.1. legat de geometria roţilor dinţate cilindrice cudantură dreaptă cu angrenare exterioară.
4.3.6.1. Efectele deplasării de profil
- deplasările de profil pozitive sunt limitate de condiţia extremă cadiametrul exterior al roţii să nu depăşească diametrul de vârf dv . - deplasările de profil negative trebuie să evite apariţia fenomenuluide interferenţă sau subtăiere.
În concluzie: - deplasarea de profil pozitivă este benefică şi se recomandăaplicarea ei ori de câte ori este posibil.- deplasarea de profil pozitivă se realizează la roata cu numărul dedinţi z mai mic, pinion;- deplasarea de profil negativă nu este benefică şi se utilizeazănumai fortuit, fiind recomandat să se aplice la roţile dinţate cu numărul mai mare de dinţi ai angrenajului.dacă este necesară realizarea de roţi dinţate cu un număr z<17,atunci este recomandat să se realizeze o corijare pozitivă a profiluluicu o valoare a deplasării dată de relaţia:

Structura mecanismelor Capitolul 1
50
4.3.6.2. Angrenajele corijate
Angrenajele corijate se folosesc din ce în ce mai mult datorităavantajelor incontestabile, date de îmbunătăţirea profilului, în consecinţă aperformanţelor cuplei, dar şi impus deoarece deplasarea de profil reprezintăo modalitate prin care antraxa angrenajului se poate corecta având în acestfel posibilitatea standardizării acestor mărimi.
Astfel, conform fig.4.17. angrenajele se pot clasifica după modul decorijare a danturii celor două roţi astfel:
- I. angrenajul nedeplasat sau zero, la care notând coeficienţii decorecţie ai celor două roţi cu 1x şi
2x , aceştia îndeplinesc condiţia:
1x = 2x =0;- II. angrenajele ,,0” deplasat sunt angrenajele la care, distanţa dintreaxe O1O2 este aceiaşi, deoarece 1x = - 2x- III. angrenajele deplasate, reprezintă cazul cel mai general, când
1 2x x¹ .
Fig.4.16.

Structura mecanismelor Capitolul 1
51
4.3.7. PARTICULARITĂŢILE ANGRENAJELOR CILINDRICECU DANTURĂ ÎNCLINATĂ
4.3.7.1. Elemente generale
Din punct de vedere al mecanismului, angrenajele cilindrice cudantură înclinată nu prezintă elemente de diferenţiere, semnificative ci maimult din punct de vedere organologic.
Dintre avantajele acestor mecanisme se pot remarca:-gabarit redus;-silenţiozitate crescută, datorită intrării progresive în angrenare a
dinţilor;-dimensiuni mai mici prin comparaţie cu cele cilindrice cu dantură
dreaptă;Dezavantajele sunt legate în primul rând:- procesul tehnologic de realizare a acestor danturi este mai
complicat necesitând maşini speciale;- datorită necesităţi prelucrării componentelor axiale a forţei de
contact dintre flancuri, sistemul de fixare pe lagăre este maicomplicat;
- construcţia ansamblului mai complicată;După cum rezultă din fig.4.18., care prezintă modurile de realizare a
acestor transmisii, pornind de la reprezentarea spaţială a acestora cu ajutorulcercurilor de divizare, respectiv, planul de referinţă al cremalierei, iar înfig.4.19. pentru a se contura mai bine particularităţile acestora, aceleaşiimagini, dar reprezentate fizic, putem întâlni trei cazuri distincte:
- angrenaj roată cremalieră (fig.4.18. a, respectiv, fig.4.19.a), caretransformă o mişcare de rotaţie într-o mişcare de translaţie şiinvers.
- angrenaj cilindric exterior cu dantura înclinată (fig.4.18.b,respectiv, fig.4.19.b);
- angrenaj cilindric interior exterior cu dantura înclinată (fig.4.18. , respectiv, fig.4.19.c);
După cum reiese din fig.418.a. dantura cremalierei este înclinată faţăde axa cremalierei paralelă cu axa roţii, cu un unghi notat cu 0b . Dacăunghiul cremalierei 0b este constant cel al roţii este variabil fiind minimpentru diametrul de la interior al roţii, şi maxim la exterior. Pentru definirearoţii se foloseşte unghiul corespunzător diametrului de divizare, numit şiunghi de înclinare mediu. În conformitate cu fig.4.18.b, danturile unui

Structura mecanismelor Capitolul 1
52
angrenaj exterior au sensuri contrare de înclinare, deoarece se rotesc însensuri opuse; implicit, elicele cilindrilor de rostogolire sunt caracterizateprin unghiuri de înclinare egale şi sensuri de înclinare opuse; acesteparticularităţi se regăsesc şi la angrenajul particular roată-cremalieră(fig.4.18.a.). În cazul angrenajului interior (fig.4.18.c.), danturile au acelaşisens de înclinare, deoarece se rotesc în acelaşi sens; implicit, elicelecilindrilor de rostogolire sunt caracterizate prin acelaşi unghi şi acelaşi sensde înclinare
4.3.7.2. Particularităţile profilului angrenajelor cilindrice cudantură dreaptă
Pentru calculul elementelor geometrice caracteristice celor douăprofile, se consideră conform fig.4.20., cremaliera de referinţă şi cele douăsecţiuni necesare studiului comparat. Avem un prim plan, situatperpendicular pe axa roţii dinţate, fig.4.21, numit plan frontal sau tăietor.
Mărimile geometrice care definesc roata corespunzătoare acesteisecţiuni, sunt conforme cu cele de la angrenajul cu dantură înclinată.
a b c
Fig.4.18.
a b c
Fig. 4.19.

Structura mecanismelor Capitolul 1
53
Relaţiile de calcul geometric ale angrenajului din acest plan frontal seobţin din relaţiile angrenajului plan (cap. 4.3.5.). Pentru o mai bunăidentificare, elementele geometrice definitorii vor purta indicele f, fiindreprezentate în secţiunea frontală F-F.. Cel de al doilea plan, se numeşteplan de secţiune normal, datorită poziţiei sale particulare de a fi normal peaxa de simetrie a dintelui studiat. Acest plan, este evident că este înclinatfaţă de axa de rotaţie a roţii cu un unghi 0b .
Deoarece conform fig.4.20. 0 fp este perpendicular pe axa roţii, fiindîn mărime naturală în planul frontal pe diametrul de divizare, 0np esteperpendicular pe axa de simetrie a dintelui, fiind în mărime naturală înplanul normal pe diametrul de divizare, se poate scrie relaţia geometricaimediată între paşii danturilor în cele două plane, respectiv:
0 0 0cosn fp p b= 4.98.sau:
000cosfn pp
bp p
= 4.99.
Cum prin definiţie:00 ; fn
n f
pp m mp p
= = 4.100.
înlocuind 4.100. în 4.99. rezulta:
0cosbfn mm = 4.101
Cum pasul danturii în cele doua secţiuni este diferit, rezultă că şiunghiurile de presiune n0a respectiv f0a corespunzătoare cercului dedivizare vor avea valori diferite.
Relaţiile de calcul geometric pentru angrenaje cilindrice exterioarecu dantură dreaptă şi înclinată

Structura mecanismelor Capitolul 1
54
4.3.8. PARTICULARITĂŢILE ANGRENAJELOR CONICE
4.3.8.1. Aspecte generale
Angrenajele conice au fost create pentru a transmite mişcarea derotaţie şi un cuplu util între axe concurente ce formează între ele diferiteunghiuri, notate cu δ.
Aceste conuri vor avea nume semnificative, similare cu cele alecercurilor de la angrenajele cilindrice, după cum urmează:
- Conul de divizare, echivalentul cercului de divizare;- Conul exterior, echivalentul cercului exterior;- Conul interior, echivalentul cercului interior;- Conul de vârf, echivalentul cercului de vârf;
Cea mai performantă soluţie o reprezintă angrenajele conice cudantură curbă, la care axa de simetrie a dintelui realizează un unghi variabilcu generatoarea conului de divizare. În fig.4.23. sunt redate schematic patrudin cele mai utilizate tipuri de curbe pentru aceste angrenaje. În timpulangrenării, fiecărei roţi conice, similar cercurilor de rostogolire ale roţilorcilindrice, îi corespunde ca suprafaţă de rostogolire câte un con derostogolire.
Fig.4.22.

Structura mecanismelor Capitolul 1
55
4.3.8.2. Clasificarea angrenajelor conice după poziţia relativă aconurilor de rostogolire
Pentru a studia posibilităţile de realizare şi utilizare a angrenajelorconice, sunt redate în figura 4.24. prin reprezentare schematică şi respectiv însecţiune, cele mai reprezentative trei clase de angrenaje. Aşa cum rezultă dinfigura 4.24. funcţie de poziţia relativă a conurilor de rostogolire, acesteangrenaje conice pot fi:
a) Angrenaje concurente conice exterioare (fig.4.24.a, reprezentareschematică şi b reprezentare în secţiune);
b) Angrenaje concurente conice interioare (fig.4.24.c, reprezentareschematică şi d reprezentare în secţiune);
c) Angrenaje concurente conice cu rotaţie plană (fig.4.24.ereprezentare schematică şi f reprezentare în secţiune).
4.3.8.3. Angrenajul cilindric cu dantură dreaptă echivalentangrenajului conic
Pentru calculul geometric se considera cele 2 roţi cilindriceechivalente ale căror mărimi geometrice caracteristice poarta indicele 1S şirespectiv 2S .
Fig.4.23.

Structura mecanismelor Capitolul 1
56
Conform figurii dacă se rulează conul exterior după un plan ce conţinegeneratoarea 1O PS ,respectiv 2O PS , urma lăsată pe plan sunt cele doua roţicilindrice echivalente având diametrele de divizare 1dd S şi respectiv 2dd S
date de relaţiile:1 1
1 11 1
2 22 2
2 2
2 22cos cos2 22cos cos
dd
dd
O P dd PO
O P dd PO
d d
d d
S S
S S
ì = = =ïïíï = = =ïî
4.112.
în care 1dd S şi 2dd S reprezintă diametrele de divizare ale roţii conice laexteriorul dintelui.
Se obţin numerele de dinţi ai roţilor echivalente cilindrice cu danturădreaptă, respectiv:
11
1
22
2
cos
cos
zz
zz
d
d
S
S
ì =ïïíï =ïî
4.114.
4.3.10. PARTICULARITĂŢILE ANGRENAJELOR MELCATE
Angrenajele melcate reprezintă o clasă de angrenaje mult deosebite decele cilindrice şi conice. Aşa cum rezultă din fig.4.27., ce redă un astfel deangrenaj, principala caracteristică o constituie melcul angrenajului, care estetotdeauna roata conducătoare. Dantura melcului, cum rezultă din fig.4.27.constă din una până la maxim patru spirale, înfăşurate pe corpul melcului.
Numărul spiralelor reprezintă numărul de dinţi ai melcului, care senotează totdeauna cu z1. Datorită acestei particularităţi, profilul danturii sepoate asimila cu profilul unui şurub, iar numărul de dinţi reprezintănumărul de începuturi ale şurubului. Datorită mişcării continui de rotaţie amelcului mecanismul mai poartă numele de mecanism cu şurub fără sfârşit.
Roata conjugată melcului are de asemenea un profil deosebit,suprafaţa pe care este dispusă dantura fiind o suprafaţă riglată de hiperboloidde rotaţie. Angrenajele melcate, mai au caracteristic faptul că cele două axe

Structura mecanismelor Capitolul 1
57
sun totdeauna perpendiculare în spaţiu. Funcţie de suprafaţa pe care esteînfăşurată spira melcului, angrenajele se clasifică în:
a) Angrenaje melcate cu melc cilindric, la care melcul are spiraînfăşurată pe un cilindru (fig.4.27.)
b) Angrenaje melcate cu melc globoidal (fig.4.28.), sau angrenajegloboidale, la care spira melcului este înfăşurata pe o pânză deforma unui hiperboloid de revoluţie astfel încât şi melcul înfăşoarădantura rotii melcate. Melcul capătă formă toroidală. Datorităacestui mod de angrenare sunt cele mai performante angrenajemelcate. Hiperboloidul de revoluţie este folosit preponderent,datorită avantajului de a fi o suprafaţă riglată, ce constituie un mareavantaj din punct de vedere tehnologic, putând utiliza scule cuprofil rectiliniu. Cum rezultă din fig.4.28. suprafeţele melcului şiale roţii formează suprafeţe spaţiale reciproc înfăşurabile.
c) Angrenaje melcate cu melc conic, la care suprafaţa de înfăşurare aspirei melcului este un trunchi de con, îmbunătăţind astfel foartemult performanţele angrenajului în raport cu cel cu melc cilindric.
4.4. UTILIZĂRI ALE MECANISMELOR CU ROŢIDINŢATE
4.4.1. MECANISME CU AXE FIXE
Fig. 4.27.

Structura mecanismelor Capitolul 1
58
4.4.1.1. Lanţuri de roţi dinţate serie
Plecând de la definiţia raportului de transmitere, pentru angrenajeleexterioare:
1 1 212
2 2 1
n zin z
ww
= = = - 4.132.
Prin recurenţă, se obţine că:
)(11, 12 23 1,1 ...
kn n n
n
i i i iww -= = - × × × 4.135.
respectiv,
( )1,1
1 k nn
ziz
= - 4.136.
în care:
k= n – 1 4.137.
reprezintă numărul de angrenări exterioare realizat de cele n roţi cilindricecu dantură dreaptă ce se află în angrenare.
4.4.1.2. Lanţuri de roţi dinţate paralele
În acest caz, cu excepţia roţii conducătoare şi a roţii conduse, restulroţilor sunt montate rigid câte două pe acelaşi ax, având deci aceiaşi vitezăunghiulară
Utilizând regulile stabilite anterior, la lanţurile serie, rapoartele detransmitere vor fi date de relaţiile:

Structura mecanismelor Capitolul 1
59
)(11, 12 23 1,1 ...
kn n n
n
i i i iww -= = - × × × 4.142.
respectiv:
( ) ( )2 4 2 41,
1 3 1 1 3 1
... ...1 1... ...
k kn d d d nn
n d d d n
z z z d d diz z z d d d- -
× × × × × ×= - = -
× × × × × × 4.143.
4.4.1.3. Lanţuri de roţi dinţate combinate sau mixte
Antraxa dintre prima şi ultima roată este dată de relaţia geometricăimediată:
)(1 1
11, 1 5 5 5
2 2
12 2
n ndi di
n i i i dd dA m z z m z d
- -
+
+= + + = +å å 4.146.
relaţie valabilă pentru orice valori are modulul fiecărei perechi de roţi aflateîn angrenare,obţinută prin însumarea diametrelor de divizare pentru fiecare roată separat.
4.4.1.4. Reductoare – amplificatoare, cu roţi dinţate
Cutiile de viteze, primesc la intrări de obicei o turaţie constantă, şirealizează mai multe turaţii la ieşire, funcţie de necesităţi. Pentru a face acestlucru posibil, se utilizează fie roţi baladoare, sau alte soluţii prin care se potrealiza mai multe rapoarte de transmitere. Roţile baladoare, sunt roţi cu maimulte danturi, care pot angrena selectiv cu roţile conjugate funcţie deselecţia utilizatorului mecanismului.
Clasificarea reductoarelor şi standarde de proiectare
Reductoarele de turaţie se folosesc în toate domeniile industriei demaşini. Datorită acestei largi utilizări, există o mare tipo-diversitate de tipuride reductoare în funcţie de felul angrenajelor, schema cinematică, numărulde trepte, poziţia arborilor etc.

Structura mecanismelor Capitolul 1
60
După felul angrenajelor, reductoarele pot fi:
— cilindrice;— conice;— elicoidale;— hipoide;— melcate;— combinate;— planetare;
După poziţia arborilor, reductoarele pot fi:— orizontale;— verticale;— înclinate;
După numărul de trepte, reductoarele pot fi:— cu o treaptă;— cu două trepte;— cu mai multe trepte (un număr de trepte mai mare de trei, se
utilizează destul de rar datorită reducerii eficienţei soluţiei peansamblu).
Parametrii principali ai unui reductor sânt:
- tipul reductorul;- puterea de transmis P1;- turaţia de intrare n1;- raportul de transmitere total i;
Datorită largii dezvoltări a acestei clase a reductoarelor cu roţi dinţatefiind ansambluri mult utilizate, sa dezvoltat o bază standarde pentru multedintre mărimile necesare şi anume:
- rapoartele de transmitere 6012-82;- distanţa dintre axe în STAS 6055-82;- modulul în STAS 822-82;- simbolizarea reductoarelor în STAS 6848-80;- parametri pentru reductoare cilindrice în STAS 6850-77;- melcate în STAS 7026-77;- condiţiile tehnice de calitate în STAS6849-77, pentru
redactoarele cilindrice şi conice;

Structura mecanismelor Capitolul 1
61
- în STAS 7599-71 condiţiile tehnice de calitate pentruredactoarele melcate;
Tipuri de reductoare
Tipurile principale de reductoare şi în fig.4.36. Numărul de trepte alereductorului se adoptă. Se preferă, de asemenea, reductoarele orizontale (cupoziţia orizontală a axelor) şi cu planul de separare al carcasei în planulorizontal (fig.4.36. a), dar există şi reductoare verticale, care au planul deseparaţie înclinat etc.
Schema cea mai utilizată de reductor cilindric în două trepte, esteredată în fig.4.36. d. La reductoarele de puteri mari se face o ramificare afluxului de putere şi astfel în loc de schema din fig.4.36. d ,se poate utilizaschema din fig.4.36. e, care are şi avantajul posibilităţii montării treptei întâisimetric între lagăre, deci o repartiţie mai bună a încărcării pe lăţimeadanturii. Dacă se doreşte o coaxialitate a arborelui de intrare şi ieşire, ca încazul multor reductoare navale, se recomandă să se adopte schema dinfig.4.36. f, care dă lungimi mai mici (dar lăţimi mai mari) ale reductorului.
O combinaţie mult folosită, când trebuie deviată cu 90° direcţiamişcării, este reductorul conico-cilindric (fig.4.36. g).
Reductoarele cilindrice cu trei trepte se execută după schema dinfig.4.36. j, analoagă schemei din fig.4.36. d, sau după o schemă mult maiavantajoasă, perfecţionată (fig.4.36.k) cu o treaptă intermediară ramificatăcare realizează o simetrizare avantajoasă pe toate treptele reductorului. Serecomandă pentru cazul în care se doreşte o soluţie de optim.
O gamă mai nouă de reductoare o constituie, reductoarele cilindro-melcate. Aceste construcţii mai noi, au fost promovate ca răspuns lanecesitatea de a îmbunătăţi randamentul şi silenţiozitatea reductorului,precum şi pentru a exista un element de siguranţă a transmisiei, spreexemplu la mecanismele de ridicare. Astfel datorită caracterului uni-sens detransmitere a mişcării de către reductoarele melcate, la coborârea sarcinii,deplasarea sa se realizează numai dacă utilizatorul comandă acest lucru.

Structura mecanismelor Capitolul 1
62
Fig.4.36.

Structura mecanismelor Capitolul 1
63
Rapoartele de transmitere şi numărul de trepte.
La angrenajele cilindrice şi conice se pot accepta următoarelerecomandări [MSD1983]:
- pentru reductoarele într-o treaptă i, acest raport să fie mai mic de6,3. Pentru situaţii particulare, când roata face corp comun cu piesarespectivă, spre exemplu la mori de ciment, macarale turnante,strunguri carusel, se pot accepta şi valori cuprinse între 8... 18, culuarea anumitor măsuri;
- pentru reductoare în două trepte, se recomandă 7,1£ i £ 40(60);- pentru reductoare în trei trepte, se recomandă la 45 £ i £ 200(300).- pentru reductoarele melcate într-o treaptă, 6 £ i £ 60.. .80(100),- La reductoarele cu mai multe trepte rezultă împărţirea raportului
total de transmitere i pe treptele reductorului să se foloseascărelaţia 4.146.
i= iI iII iIII..... 4.147.
În vederea folosirii cât mai judicioase a spaţiului din carcasareductorului, precum şi pentru a asigura condiţii de ungere a angrenajelor, lareductoarele la care arborii sunt aşezaţi în plan orizontal, este necesar a selua raportul de transmitere parţial pe treapta rapidă cu valoare mai mare[ADT1981]. Spre exemplu, pentru reductorul cu 2 trepte:
i1 = (1,2 ... 1,25) totali 4.148.
Pentru cele cu trei trepte i1 > i2 > i3, iar diferenţa între rapoarteleparţiale fiind de circa 30%
i1 ³1.3 i2, i2 ³1,3i3 4.149.
La reductoarele conico-cilindrice se recomandă ca:
i1 £ totali 4.153.
4.4.2. MECANISME CU AXE MOBILE

Structura mecanismelor Capitolul 1
64
4.4.2.1. Mecanisme planetare
Mecanismele planetare, sunt angrenajele la care cel puţin o axă a uneiroţi dinţate este mobilă în spaţiu, aşa cum se poate vedea în fig.4.41.
respectiv, fig.4.42. Denumirea de angrenaje planetare vine de la faptul căau caracteristic existenţa unor roţi mobile ce sunt fixate pe un suport mobil,numit braţ portsatelit, sau suport portsateliţi dacă susţine mai multe roţi cuaxe mobile.
Suportul portsatelit se poate roti în jurul axei comune cu cea a roţii 1şi paralelă cu axele mobile ale roţilor 2. De aceea, cum se observă dinfig.4.41. şi 4.42. în timpul angrenării roţile doi se vor roti în jurul roţiicentrale 1, similar cu mişcarea planetelor în jurul soarelui. De aceea, roata 1poartă numele de roata solară (centrală), având axa fixă, iar roata 2, deroata satelit, având axa mobilă. Pentru a îmbunătăţii performanţele acestormecanisme, ele pot avea un număr mai mare de sateliţi, reuşind o mai bunădistribuţie a sarcinii de pe un singur angrenaj, precum şi o mai bunăechilibrare a ansamblului. Pentru aceasta de regulă numărul acestor sateliţieste impar. Bara sau suportul portsatelit, notată cu s, se roteşte în jurul axeifixe a roţii centrale şi odată cu ea axa mobilă O2 a satelitului. Cum rezultădin cele două scheme structurale din fig.4.41. şi 4.42. mecanismele pot firealiza diferit funcţie de modul de angrenare a sateliţilor. Dacă satelitulrealizează o angrenare exterioară, exemplul redat în fig.4.41, spunem căavem un angrenaj planetar cu roată centrală. În cel de al doilea exemplufig.4.42. sateliţii au angrenare la interior purtând numele de angrenajplanetar cu coroană centrală.
4.155.
Fig.4.41. Fig.4.42.

Structura mecanismelor Capitolul 1
65
iar prin înlocuirea celor două viteze unghiulare relative se obţine:
11 212
2 2 1
ss s
ss
ziz
w www w w
-= = = -
- 4.156.
Relaţia este cunoscută şi sub denumirea de formula lui Willis şipermite determinarea vitezei unghiulare 2w atunci când se cunosc numerelede dinţi z1 şi z2 ale roţilor 1 şi 2 şi vitezele unghiulare 1w şi respectiv sw aleelementelor conducătoare. Această relaţie se poate particulariza pentrudiferite situaţii. Astfel, dacă roata dinţată 1 se fixează, angrenajul diferenţialse transformă într-un angrenaj planetar simplu. Din formula lui Willis,pentru această situaţie 1w = 0, rezultă:
2
2 1
s
s
zz
ww w
= - Þ- 4.157.
2 1 12 2
2 2
1 1s ss
z ziz z
w w ww
æ ö= =+ Þ = +ç ÷
è ø