Embed Size (px)
Citation preview
MECANISMOS DE AUTOMAÇÃO DO VEÍCULO MAGLEV-COBRA E
ENQUADRAMENTO À NORMA APM - AUTOMATED PEOPLE MOVER
Eric Lustosa Caillaux
Projeto de Graduação apresentado ao Curso
de Engenharia Elétrica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Richard Magdalena Stephan
Rio de Janeiro
Setembro de 2017

MECANISMOS DE AUTOMAÇÃO DO VEÍCULO MAGLEV-COBRA E
ENQUADRAMENTO À NORMA APM - AUTOMATED PEOPLE MOVER
Eric Lustosa Caillaux
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO
CURSO DE ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE
DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO ELETRICISTA.
Examinado por:
Prof. Richard Magdalena Stephan, Dr.-Ing.
Prof. Elkin Ferney Rodriguez Velandia, D.Sc.
Eng. Roberto André Henrique de Oliveira, M.Sc.
RIO DE JANEIRO, RJ BRASIL
SETEMBRO DE 2017

Lustosa Caillaux, Eric
Mecanismos de automação do veículo MagLev-Cobra
e enquadramento à norma APM - Automated People
Mover/Eric Lustosa Caillaux. Rio de Janeiro: UFRJ/
Escola Politécnica, 2017.
XIV, 49 p.: il.; 29, 7cm.
Orientador: Richard Magdalena Stephan
Projeto de Graduação UFRJ/ Escola Politécnica/
Curso de Engenharia Elétrica, 2017.
Referências Bibliográcas: p. 43 43.
1. MagLev. 2. Automação. 3. CLP. 4. APM. I.
Magdalena Stephan, Richard. II. Universidade Federal do
Rio de Janeiro, Escola Politécnica, Curso de Engenharia
Elétrica. III. Título.
iii

Dedico este trabalho a minha
família, cujo amor me permitiu
saber qual caminho a trilhar e
ter forças para conseguir.
iv

Agradecimentos
Gostaria de agradecer, em primeiro lugar, ao apoio dado por minha família. Em
especial, a meus pais, pela educação dentro de casa e pelo estímulo aos estudos.
À Universidade Federal do Rio de Janeiro, seu corpo docente e administração,
estendendo meus agradecimentos ao Governo Federal, pela chance de ter tido educa-
ção pública de qualidade, que espero poder sempre retribuir em minhas ações como
cidadão.
A meu orientador, professor Richard Magdalena Stephan, alguém cujo saber não
impede a virtude da humildade, pela oportunidade de me envolver com o projeto
MagLev-Cobra. Posso armar que minhas contribuições se reetiram em avanço
modesto em relação à dimensão tecnológica do projeto, mas em enorme aprendizado
para minha formação.
Aos professores, técnicos e colegas do LASUP e LABMAQ, que sempre se dispu-
seram a me ajudar: Edeval, Elkin, Felipe, Jonatha, Marcio, Raul, Renato, Roberto,
Rubens, Sergio, Vina.
Um sincero muito obrigado a todos.
v

Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Eletricista.
MECANISMOS DE AUTOMAÇÃO DO VEÍCULO MAGLEV-COBRA E
ENQUADRAMENTO À NORMA APM - AUTOMATED PEOPLE MOVER
Eric Lustosa Caillaux
Setembro/2017
Orientador: Richard Magdalena Stephan
Curso: Engenharia Elétrica
Apresentam-se, neste trabalho, os mecanismos presentes no veículo MagLev-
Cobra que se beneciam do uso de controladores lógicos programáveis para ter sua
operação tornada mais eciente, segura e integrada. Por se tratar de um protótipo
operacional de uma alternativa de transporte urbano, tais sistemas são apresentados
como soluções práticas e são discutidas, também, como contribuições futuras visando
aos próximos passos do projeto MagLev-Cobra, em especial o objetivo de avanço na
automação de todos os sistemas do veículo. Neste aspecto, a norma Automated
People Mover Standards da American Society of Civil Engineers é balizadora e
estimula uma análise de cada um dos sistemas abordados por este trabalho à luz de
seus requisitos.
vi

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulllment
of the requirements for the degree of Engineer.
AUTOMATION MECHANISMS OF THE MAGLEV-COBRA VEHICLE AND
ADAPTION TO THE APM - AUTOMATED PEOPLE MOVER - STANDARD
Eric Lustosa Caillaux
September/2017
Advisor: Richard Magdalena Stephan
Course: Electrical Engineering
This work presents the mechanisms present in the MagLev-Cobra vehicle that
benet from the use of programmable logic controllers to make its operation more
ecient, safer and more integrated. As it is an operational prototype of an urban
transportation alternative, such systems are presented as practical solutions and are
also discussed as future contributions towards the next steps of the MagLev-Cobra
project, especially the goal of enhancing the automation of all the vehicle systems.
In this respect, the Automated People Mover Standards from American Society of
Civil Engineers is a beacon and encourages an analysis of each of the systems covered
by this work according to its requirements.
vii

Sumário
Lista de Figuras x
Lista de Tabelas xii
Lista de Abreviaturas xiii
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Controladores Lógicos Programáveis 3
2.1 Evolução dos controles industriais . . . . . . . . . . . . . . . . . . . . 3
2.2 Arquitetura de um CLP . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.1 Partes de um CLP . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2.2 Princípio de operação . . . . . . . . . . . . . . . . . . . . . . . 6
2.2.3 Programação em Ladder . . . . . . . . . . . . . . . . . . . . . 7
2.3 CLP WEG TPW-03 . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Características básicas de entrada e saída . . . . . . . . . . . . 10
2.3.2 Endereços básicos de programação . . . . . . . . . . . . . . . 12
2.3.3 Contadores de alta velocidade . . . . . . . . . . . . . . . . . . 14
3 Sensor de velocidade e posição 15
3.1 Função velocímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1.1 Disposição da informação em uma IHM . . . . . . . . . . . . . 16
3.2 Função odômetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.1 Interface com o CLP . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.2 Resultado e discussão do sensoriamento de posição . . . . . . 21
4 Automação dos mecanismos auxiliares do veículo 23
4.1 Portas do veículo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Portas das estações . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
viii
4.3 Freio mecânico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 Descrição do sistema . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.2 Pressurização automática do óleo de freio . . . . . . . . . . . . 27
4.4 Sistema de abastecimento automático de nitrogênio líquido . . . . . . 30
4.4.1 Método de detecção de nível de LN2 . . . . . . . . . . . . . . 31
4.4.2 Automação do processo com TPW-03 . . . . . . . . . . . . . . 32
5 Contribuição ao enquadramento à norma APM 35
5.1 Movimentador automático de pessoas . . . . . . . . . . . . . . . . . . 35
5.2 Itens da norma relacionados aos mecanismos auxiliares do veículo . . 36
5.2.1 Controle Automático do Trem (ATC - Automated Train Control) 36
5.2.2 Equipamentos elétricos . . . . . . . . . . . . . . . . . . . . . . 39
5.2.3 Monitoramento operacional . . . . . . . . . . . . . . . . . . . 39
6 Conclusões e trabalhos futuros 41
6.1 Conclusões . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.2 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Referências Bibliográcas 43
A Programa carregado no CLP do veículo 44
B Ajustes para funções velocímetro e odômetro 48
B.1 Velocímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
B.2 Odômetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
ix

Lista de Figuras
2.1 Regulador de esferas suspensas. Disponível em
pt.wikipedia.org/wiki/Governador_centrífugo . . . . . . . . . . . . . 3
2.2 Painel de controle dos anos 1960. Extraído de [4] . . . . . . . . . . . 4
2.3 Diagrama de blocos de um CLP. . . . . . . . . . . . . . . . . . . . . . 5
2.4 Ciclo de varredura . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.5 Relé de atração, com contatos NA e NF. Extraído de [6] . . . . . . . 8
2.6 Símbolos ladder para contatos do relé . . . . . . . . . . . . . . . . . . 8
2.7 Bobina de saída em ladder . . . . . . . . . . . . . . . . . . . . . . . . 10
2.8 Desenho da unidade básica do CLP TPW-03. Extraído de [7] . . . . . 12
2.9 Terminais de entrada e saída digital. Extraído de [7] . . . . . . . . . . 12
2.10 Instruções por borda: (a) De subida (b) De descida . . . . . . . . . . 14
3.1 Console eletrônico do sensor Aqua L-350. Extraído de [9] . . . . . . . 16
3.2 ligações do sensor Aqua L-350 no veículo . . . . . . . . . . . . . . . . 17
3.3 Diagrama ladder: conversão do sinal de velocidade. . . . . . . . . . . 18
3.4 Diagrama ladder: conguração do protocolo de comunicação. . . . . . 18
3.5 Conguração da comunicação da tela DOP-B . . . . . . . . . . . . . 19
3.6 Tela exibida no painel informativo . . . . . . . . . . . . . . . . . . . . 19
3.7 Uso da informação correta de posição no CLP . . . . . . . . . . . . . 22
4.1 Circuito das portas e ligações com TPW-03 . . . . . . . . . . . . . . 24
4.2 Diagrama ladder: fechamento de portas. . . . . . . . . . . . . . . . . 25
4.3 Diagrama ladder: abertura de portas. . . . . . . . . . . . . . . . . . . 25
4.4 Acionamento do freio mecânico . . . . . . . . . . . . . . . . . . . . . 27
4.5 Diagrama ladder: conguração para recebimento do sinal analógico
de corrente (pressostato). . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.6 Ligação do transdutor de pressão ao CLP . . . . . . . . . . . . . . . . 28
4.7 Diagrama ladder: pressurização automática de óleo de freio. . . . . . 29
4.8 Comando da bomba de óleo . . . . . . . . . . . . . . . . . . . . . . . 30
4.9 Análise da temperatura dos gases de saída do criostato. Extraído de [3] 32
x

4.10 Esquema básico de automação de válvula de abastecimento. Extraído
de [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.11 Diagrama ladder de automação de válvula de abastecimento. Ex-
traído de [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.12 Tela de painel interativo para controle de abastecimento. Extraído
de [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.13 Abastecimento manual por gravidade em comparação a automático
pressurizado. Extraído de [3] . . . . . . . . . . . . . . . . . . . . . . . 34
5.1 Acionamento do freio mecânico apenas com detecção de velocidade zero 38
5.2 Implementação no CLP do intertravamento de acionamento do freio
com a velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.3 Tempo de espera de abertura de portas do veículo . . . . . . . . . . . 39
xi
Lista de Tabelas
2.1 Funções lógicas, em diagramas de bloco de funções e ladder . . . . . . 11
2.2 Características das entradas digitais . . . . . . . . . . . . . . . . . . . 13
2.3 Características das saída digitais a relé . . . . . . . . . . . . . . . . . 13
2.4 Características das entradas analógicas . . . . . . . . . . . . . . . . . 14
3.1 Especicações do sensor Aqua L-350 . . . . . . . . . . . . . . . . . . 15
xii

Lista de Abreviaturas
APM Movimentador Automático de Pessoas, do inglês Automated
People Mover, p. 1
ATC Controle Automático do Trem, do inglês Automated Train
Control, p. 35
ATO Operação Automática do Trem, do inglês Automatic Train
Operation, p. 35
ATP Proteção Automática do Trem, do inglês Automatic Train Pro-
tection, p. 35
ATS Supervisão Automática do Trem, do inglês Automatic Train
Supervision, p. 35
CLP Controlador Lógico Programável, p. 1
COPPE Instituto Alberto Luiz Coimbra de Pós-graduação e Pesquisa
de Engenharia, p. 1
FBD Function Block Diagram, p. 7
IHM Interface homem-máquina, p. 5
LASUP Laboratório de Aplicações de Supercondutores, p. 1
LN2 Nitrogênio Líquido (Liquid nitrogen), p. 29
NA Normalmente aberto, p. 8
NF Normalmente fechado, p. 8
OTE Output Energize, p. 10
RTD Resistance Temperature Detector, p. 30
UFRJ Universidade Federal do Rio de Janeiro, p. 1
xiii

XIC Examine if closed, p. 8
XIO Examine if open, p. 8
xiv

Capítulo 1
Introdução
1.1 Motivação
O esgotamento das modalidades de locomoção de pessoas em razão do incessante
crescimento das metrópoles, em conjunto com as preocupações indispensáveis às
novas soluções tecnológicas no tocante à preservação do meio ambiente e à emissão
de gases poluentes, motivam a ciência a criar novas concepções para o transporte
urbano e a torná-lo mais eciente do ponto de vista energético.
O projeto MagLev-Cobra, desenvolvido no Laboratório de Aplicações de Super-
condutores (LASUP) da COPPE/UFRJ propõe uma moderna alternativa para os
deslocamentos dentro das grandes cidades, ao se apresentar como um veículo elé-
trico de baixíssimo consumo, uma vez que se fundamenta na tecnologia de levitação
magnética, eliminando, em seus deslocamentos, o atrito inerente aos sistemas roda-
trilho. Este tipo de projeto, pioneiro no uso da tecnologia de levitação magnética
supercondutora para um protótipo de testes em escala real, traz outras vantagens em
relação a sistemas urbanos convencionais, dentre as quais a sua maior capacidade de
aceleração, desaceleração e de subida de aclives, além de um custo de implantação
de cerca de um terço dos metrôs[1].
1.2 Objetivos
Este trabalho tem por objetivo relacionar os sistemas de automação presentes no pro-
tótipo operacional do MagLev-Cobra, discutindo tanto soluções já implementadas
aos mecanismos auxiliares do veículo através de Controladores Lógico Programáveis
(CLP) quanto possíveis avanços futuros, com vistas a tornar a operação cada vez
mais automatizada, contribuindo para sua eciência e segurança.
Tendo em vista a meta de certicação da linha de testes, serão apresentados al-
guns tópicos da norma APM (Automated People Mover) da Sociedade Americana de
1

Engenheiros Civis (ASCE American Society of Civil Engineers), conforme foi feito
em [2] e serão discutidos os avanços efetuados até o momento para o enquadramento
do MagLev-Cobra a esta norma.
1.3 Organização do trabalho
O trabalho está organizado na sequência apresentada abaixo:
No capítulo 2, é feita uma revisão teórica tratando de Controladores Lógicos
Programáveis e sobre a linguagem mais comumente utilizada na programação deste
tipo de ferramenta, os diagramas Ladder. São apresentadas, também, características
do modelo CLP que se optou por utilizar no MagLev-Cobra, o TPW-03 do fabricante
WEG.
O capítulo 3 aborda o principal mecanismo de sensoriamento presente no veículo
utilizado para ns de automação: o sensor óptico Correvit L-350 Aqua, do fabricante
Corrsys-Datron. Apresentam-se algumas informações a respeito deste equipamento e
detalham-se as formas como suas informações são recebidas pelo CLP e aproveitadas
pelos sistemas do veículo.
O capítulo 4 trata de alguns mecanismos auxiliares do MagLev-Cobra que pu-
deram ser automatizados com o uso do CLP ou que possivelmente se beneciarão
do uso desta ferramenta em aplicações futuras: abertura e fechamento de portas do
veículo, acionamento automático das portas da estação, freio mecânico e sistema de
abastecimento de nitrogênio líquido[3]
O capítulo 5 se dedica à análise da possibilidade de enquadramento do MagLev-
Cobra à norma APM. São apresentados alguns tópicos discutidos em [2] acerca do
tema, em especial aqueles que se relacionam aos sistemas de automação e sensori-
amento de que tratam os capítulos 2 e 3, e discutem-se os avanços realizados, bem
como os próximos passos para a certicação da linha de testes.
O capítulo 6 apresenta as conclusões obtidas e sugere temas para trabalhos fu-
turos relacionados à automação do veículo.
2

Capítulo 2
Controladores Lógicos Programáveis
2.1 Evolução dos controles industriais
Os primeiros dispositivos destinados a realizar funções de controle em manufaturas
industriais eram mecânicos, sendo o regulador centrífugo de máquinas a vapor pro-
posto por James Watt em 1769 (gura 2.1) o perfeito exemplo destes inventos, por
ser o primeiro a aplicar de forma robusta e automática o controle proporcional em
malha fechada.
Figura 2.1: Regulador de esferas suspensas. Disponível empt.wikipedia.org/wiki/Governador_centrífugo
Nas primeiras décadas do século XX, tais dispositivos deram lugar aos comandos
por relés, ampliando os horizontes da engenharia de controle num cenário industrial
já dominado pelas máquinas elétricas.
Ainda nos anos 1960, os comandos elétricos industriais eram realizados em salas
de controle com paredes repletas de relés, blocos de contato e emaranhados de os.
A gura 2.2 ilustra um painel de controle por relés dos anos 1960.
Este tipo de tecnologia apresentava problemas, como pouca exibilidade para
expandir o processo, suscetibilidade elevada a falhas em razão do grande número de
componentes e difícil diagnóstico de manutenção.
Com o avanço nas pesquisas voltadas para a aplicação de dispositivos semicon-
dutores, os comandos eletromecânicos começaram a ser substituídos, na indústria
3
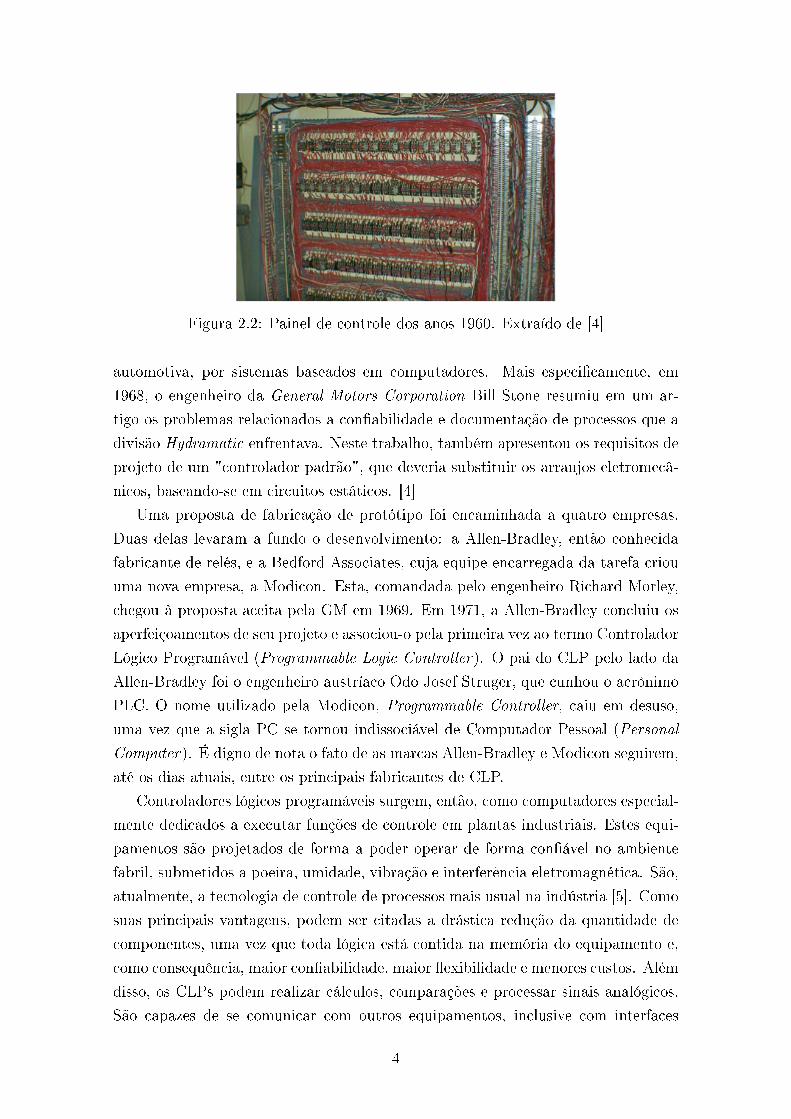
Figura 2.2: Painel de controle dos anos 1960. Extraído de [4]
automotiva, por sistemas baseados em computadores. Mais especicamente, em
1968, o engenheiro da General Motors Corporation Bill Stone resumiu em um ar-
tigo os problemas relacionados a conabilidade e documentação de processos que a
divisão Hydramatic enfrentava. Neste trabalho, também apresentou os requisitos de
projeto de um "controlador padrão", que deveria substituir os arranjos eletromecâ-
nicos, baseando-se em circuitos estáticos. [4]
Uma proposta de fabricação de protótipo foi encaminhada a quatro empresas.
Duas delas levaram a fundo o desenvolvimento: a Allen-Bradley, então conhecida
fabricante de relés, e a Bedford Associates, cuja equipe encarregada da tarefa criou
uma nova empresa, a Modicon. Esta, comandada pelo engenheiro Richard Morley,
chegou à proposta aceita pela GM em 1969. Em 1971, a Allen-Bradley concluiu os
aperfeiçoamentos de seu projeto e associou-o pela primeira vez ao termo Controlador
Lógico Programável (Programmable Logic Controller). O pai do CLP pelo lado da
Allen-Bradley foi o engenheiro austríaco Odo Josef Struger, que cunhou o acrônimo
PLC. O nome utilizado pela Modicon, Programmable Controller, caiu em desuso,
uma vez que a sigla PC se tornou indissociável de Computador Pessoal (Personal
Computer). É digno de nota o fato de as marcas Allen-Bradley e Modicon seguirem,
até os dias atuais, entre os principais fabricantes de CLP.
Controladores lógicos programáveis surgem, então, como computadores especial-
mente dedicados a executar funções de controle em plantas industriais. Estes equi-
pamentos são projetados de forma a poder operar de forma conável no ambiente
fabril, submetidos a poeira, umidade, vibração e interferência eletromagnética. São,
atualmente, a tecnologia de controle de processos mais usual na indústria [5]. Como
suas principais vantagens, podem ser citadas a drástica redução da quantidade de
componentes, uma vez que toda lógica está contida na memória do equipamento e,
como consequência, maior conabilidade, maior exibilidade e menores custos. Além
disso, os CLPs podem realizar cálculos, comparações e processar sinais analógicos.
São capazes de se comunicar com outros equipamentos, inclusive com interfaces
4
homem-máquina (IHM) , que facilitam consideravelmente a programação na memó-
ria e permitem a monitoração de processos em tempo real. O CLP apresenta tempo
de resposta consideravelmente pequeno, sendo adequado à velocidade dos processos
industriais.
2.2 Arquitetura de um CLP
2.2.1 Partes de um CLP
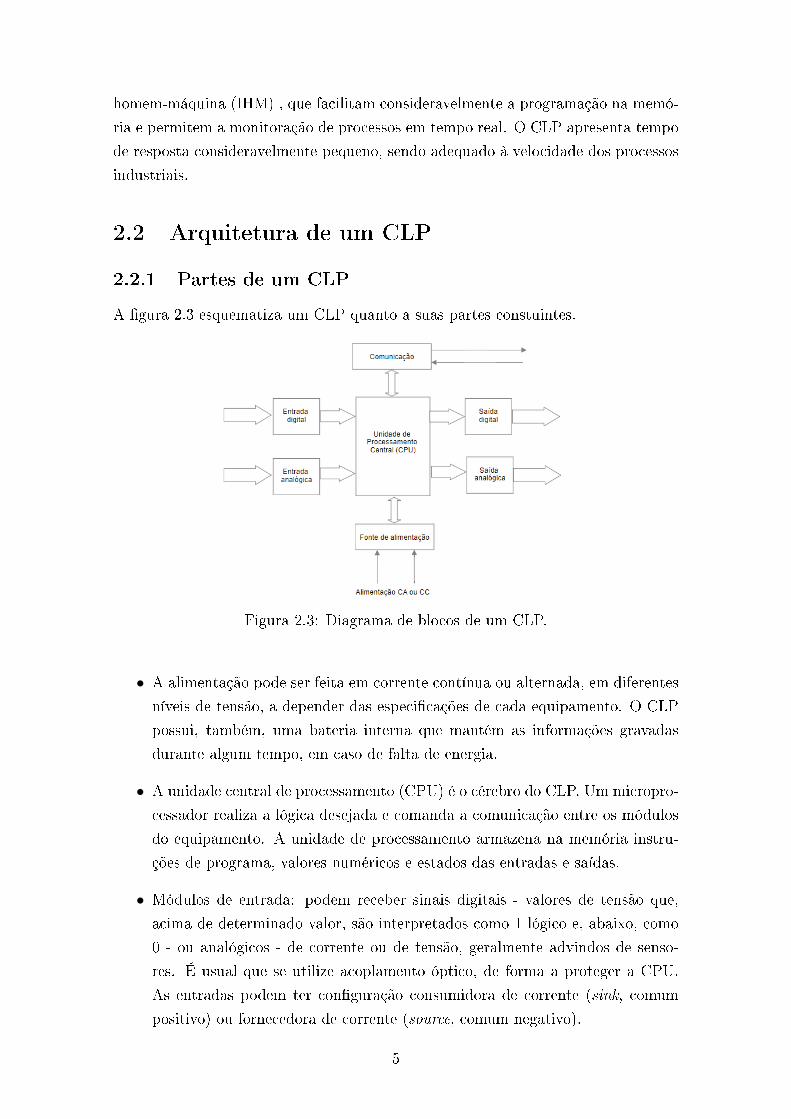
A gura 2.3 esquematiza um CLP quanto a suas partes constuintes.
Figura 2.3: Diagrama de blocos de um CLP.
• A alimentação pode ser feita em corrente contínua ou alternada, em diferentes
níveis de tensão, a depender das especicações de cada equipamento. O CLP
possui, também, uma bateria interna que mantém as informações gravadas
durante algum tempo, em caso de falta de energia.
• A unidade central de processamento (CPU) é o cérebro do CLP. Um micropro-
cessador realiza a lógica desejada e comanda a comunicação entre os módulos
do equipamento. A unidade de processamento armazena na memória instru-
ções de programa, valores numéricos e estados das entradas e saídas.
• Módulos de entrada: podem receber sinais digitais - valores de tensão que,
acima de determinado valor, são interpretados como 1 lógico e, abaixo, como
0 - ou analógicos - de corrente ou de tensão, geralmente advindos de senso-
res. É usual que se utilize acoplamento óptico, de forma a proteger a CPU.
As entradas podem ter conguração consumidora de corrente (sink, comum
positivo) ou fornecedora de corrente (source, comum negativo).
5
• Módulos de saída: saída digitais fazem o papel de relés, conectando e desconec-
tando fontes de alimentação a motores, lâmpadas, válvulas solenóides e outras
cargas elétricas. Podem se apresentar como verdadeiros relés internos, com a
vantagem de trabalharem com níveis de tensão e corrente de saída maiores, ou
como transistores fotoacoplados, com a vantagem de comutação mais rápida.
Há também a possibilidade de se ter saída do tipo analógica, como um sinal
de controle de baixa potência.
• Módulos de comunicação permitem que o CLP interaja com outros CLPs,
IHMs, inversores de frequência, etc. As redes de comunicação formadas são
denominadas eld bus [6]. Uma interface direta de programação está presente
em alguns CLPs, enquanto outros requerem que as instruções sejam carregadas
a partir de dispositivos externos capazes de execução de softwares para escrita
das instruções.
2.2.2 Princípio de operação
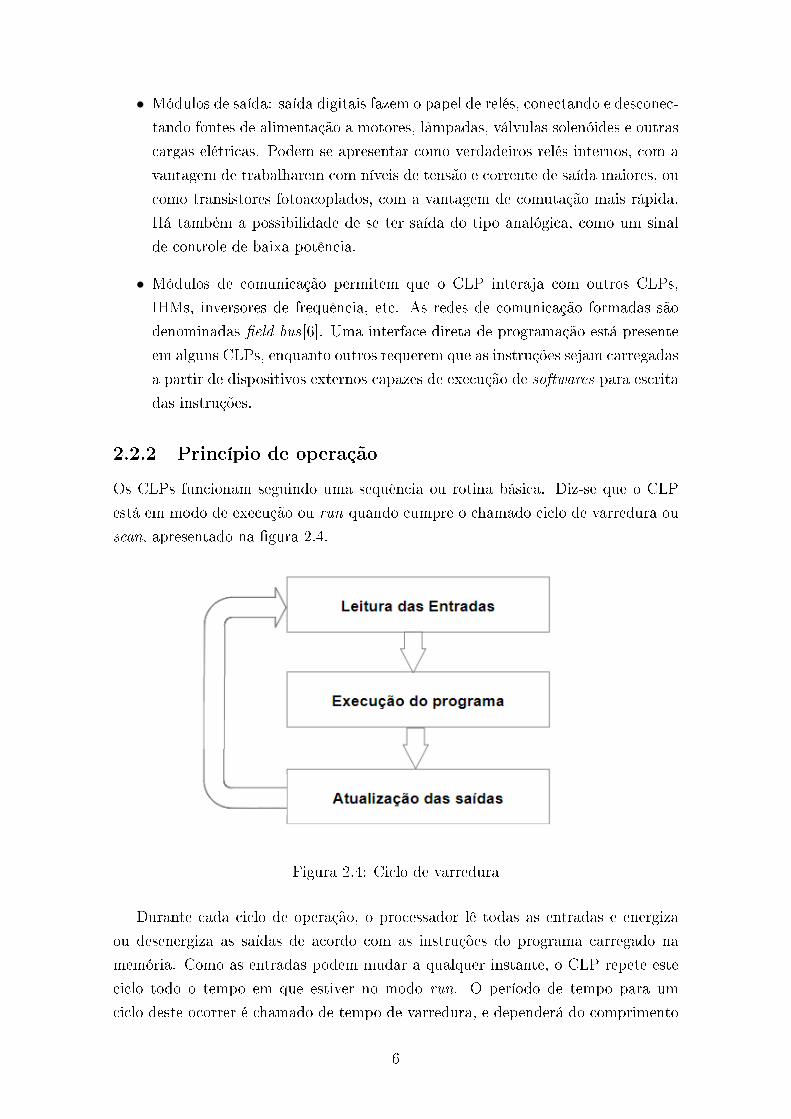
Os CLPs funcionam seguindo uma sequência ou rotina básica. Diz-se que o CLP
está em modo de execução ou run quando cumpre o chamado ciclo de varredura ou
scan, apresentado na gura 2.4.
Figura 2.4: Ciclo de varredura
Durante cada ciclo de operação, o processador lê todas as entradas e energiza
ou desenergiza as saídas de acordo com as instruções do programa carregado na
memória. Como as entradas podem mudar a qualquer instante, o CLP repete este
ciclo todo o tempo em que estiver no modo run. O período de tempo para um
ciclo deste ocorrer é chamado de tempo de varredura, e dependerá do comprimento
6

e complexidade do programa. Imediatamente após a conclusão da varredura atual,
o próximo já se inicia. A atualização de entradas acontece no início de cada scan,
enquanto as saídas são atualizadas no nal da varredura.
2.2.3 Programação em Ladder
A norma IEC 61131 padroniza as múltiplas linguagens de programação associadas
a CLPs, classicando-as nos grupos:
• Diagramas ladder: representação gráca direta da lógica de acionamentos por
relés, contatos auxiliares, botoeiras, elementos temporizados etc.
• Diagramas de blocos de funções (ou FBD, do inglês Function Block Diagram) :
representação gráca de processos utilizando blocos interligados, semelhantes
aos utilizados em esquemas de eletrônica digital.
• Sequenciamento gráco de funções (Grafcet): é uma linguagem gráca que per-
mite a descrição de ações sequenciais, paralelas e alternadas existentes numa
aplicação de controle.
• Lista de instruções: linguagem baseada em texto, de baixo nível, que usa
mnemônicos de instruções
• Texto estruturado: linguagem baseada em texto, de alto nível, como BASIC,
C ou PASCAL, especicamente desenvolvida para aplicações de controles in-
dustriais
A linguagem ladder é a mais comumente utilizada, uma vez que se mantém el à
simbologia da lógica de acionamento por relés, justamente a que motivou o desenvol-
vimento dos CLPs . A gura 2.5 apresenta a ilustração de um relé eletromecânico.
Se os terminais da bobina receberem uma tensão A maior ou igual à tensão
de pick-up do relé (nesse caso, A será considerada, do ponto de vista lógico, como
em nível alto), a força magnética será igual ou maior à força da mola, atraindo
a armadura e levando os contatos comum e normalmente aberto (NA) a terem
continuidade. Se A for diminuída para um valor menor do que a tensão de drop−out(A em nível lógico baixo), a mola restituirá a posição inicial da armadura, e o contato
normalmente fechado (NF) estará ligado ao contato comum. A representação ladder
para os contatos NA e NF referentes à entrada A é dada na gura 2.6
A maneira como a lógica da simbologia de contatos é realizada pelo processador
do CLP se dá pela interpretação dos símbolos das guras 2.6a e 2.6b como instruções
vericador de fechado (XIC - examine if closed) e vericador de aberto (XIO -
examine if open) , respectivamente.
A instrução XIC se dá pelos seguintes passos[5]:
7

Figura 2.5: Relé de atração, com contatos NA e NF. Extraído de [6]
(a) NA (b) NF
Figura 2.6: Símbolos ladder para contatos do relé
• O bit da memória referente ao contato NA é estabelecido em 1 ou 0, de-
pendendo do estado do dispositivo físico de entrada ou do estado lógico do
endereço de relé interno associado.
• Um 1 corresponde a um estado verdadeiro ou a uma condição on (ligado).
• Um 0 corresponde a um estado falso ou a uma condição o (desligado).
• Quando a instrução XIC estiver associada a uma entrada física, a instrução
assumirá o valor 1 (verdadeiro) se uma entrada física estiver presente(isto é,
se houver tensão aplicada àquela entrada) e 0 (falso) quando não estiver.
• Quando a instrução XIC estiver associada um endereço de relé interno, o estado
do bit é dependente do estado lógico do bit interno com o mesmo endereço da
instrução.
• Se o bit da instrução for 1 (verdadeiro), ela permitirá a continuidade, como
8

um contato fechado de relé.
• Se o bit da instrução for 0 (falso), ela não permitirá a continuidade, como um
contato aberto de um relé.
Já a instrução XIO segue as etapas abaixo[5]:
• O bit da memória referente ao contato NF é estabelecido em 1 ou 0, depen-
dendo do estado do dispositivo físico de entrada ou do estado lógico do endereço
de relé interno associado.
• Um 1 corresponde a um estado verdadeiro ou a uma condição on (ligado).
• Um 0 corresponde a um estado falso ou a uma condição o (desligado).
• Quando a instrução XIO estiver associada a uma entrada física, a instrução
assumirá o valor 0 (falso) se uma entrada física estiver presente(isto é, se
houver tensão aplicada àquela entrada) e 1 (verdadeiro) quando não estiver.
• Quando a instrução XIO estiver associada um endereço de relé interno, o estado
do bit é dependente do estado lógico do bit interno com o mesmo endereço da
instrução.
• Se o bit da instrução for 1 (verdadeiro), ela permitirá a continuidade, como
um contato fechado de relé.
• Se o bit da instrução for 0 (falso), ela não permitirá a continuidade, como um
contato aberto de um relé.
Estes contatos virtuais são dispostos entre duas raias, correspondentes à alimentação
entre duas fases (ou entre fase e neutro) num esquema de controle real. A depender
da disposição dos contatos NA e NF e do estado de suas entradas, poderá haver
continuidade elétrica a partir de uma raia até um elemento de saída, que se conecta
à outra raia. Nos esquemas reais, esta saída corresponde à bobina de um contator,
que irá ligar ou desligar cargas, acionar dispositivos de sinalização, alarmes etc. Nos
diagramas ladder, se houver continuidade lógica, o bit corresponde à saída vai a
nível alto. Isto pode levar, a depender do endereço da saída, à comutação de uma
saída física digital, ligando os pontos elétricos a ela conectados. O símbolo de saída
em ladder é uma bobina (gura 2.7).
O símbolo da gura 2.7 se traduz para o CLP como a instrução energização
de saída (OTE-output energize) . O funcionamento da instrução OTE pode ser
resumido como se segue[5]:
9
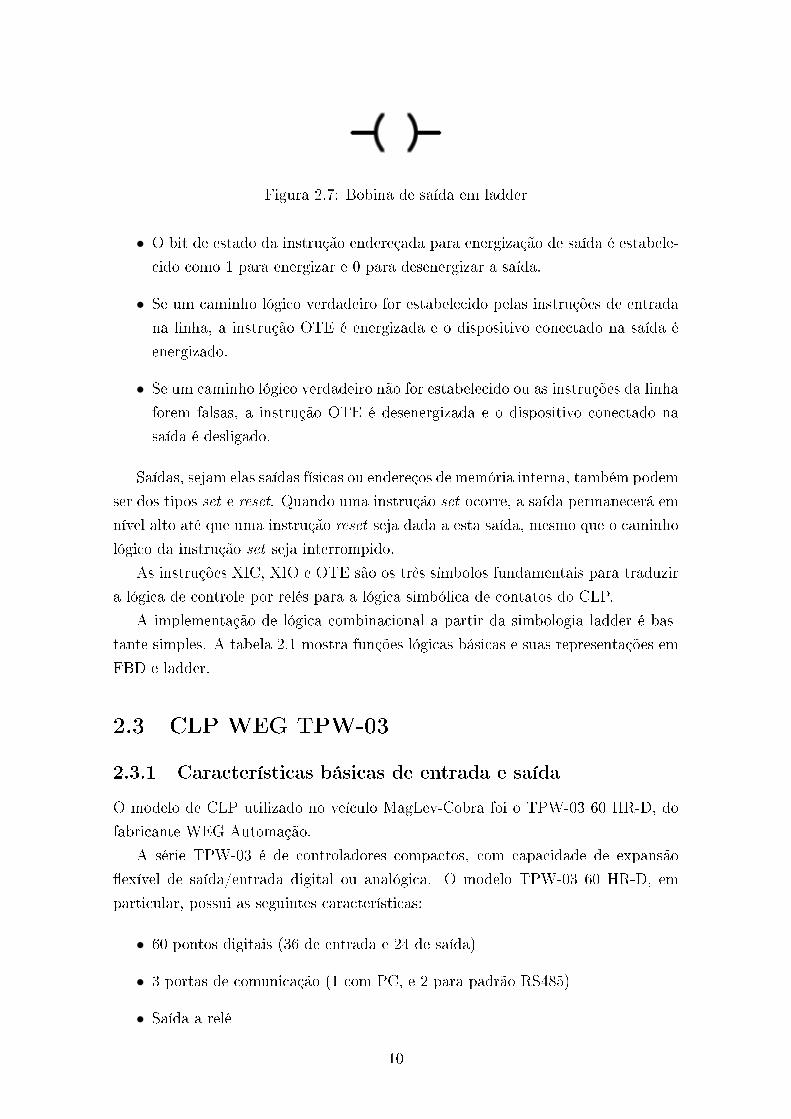
Figura 2.7: Bobina de saída em ladder
• O bit de estado da instrução endereçada para energização de saída é estabele-
cido como 1 para energizar e 0 para desenergizar a saída.
• Se um caminho lógico verdadeiro for estabelecido pelas instruções de entrada
na linha, a instrução OTE é energizada e o dispositivo conectado na saída é
energizado.
• Se um caminho lógico verdadeiro não for estabelecido ou as instruções da linha
forem falsas, a instrução OTE é desenergizada e o dispositivo conectado na
saída é desligado.
Saídas, sejam elas saídas físicas ou endereços de memória interna, também podem
ser dos tipos set e reset. Quando uma instrução set ocorre, a saída permanecerá em
nível alto até que uma instrução reset seja dada a esta saída, mesmo que o caminho
lógico da instrução set seja interrompido.
As instruções XIC, XIO e OTE são os três símbolos fundamentais para traduzir
a lógica de controle por relés para a lógica simbólica de contatos do CLP.
A implementação de lógica combinacional a partir da simbologia ladder é bas-
tante simples. A tabela 2.1 mostra funções lógicas básicas e suas representações em
FBD e ladder.
2.3 CLP WEG TPW-03
2.3.1 Características básicas de entrada e saída
O modelo de CLP utilizado no veículo MagLev-Cobra foi o TPW-03 60 HR-D, do
fabricante WEG Automação.
A série TPW-03 é de controladores compactos, com capacidade de expansão
exível de saída/entrada digital ou analógica. O modelo TPW-03 60 HR-D, em
particular, possui as seguintes características:
• 60 pontos digitais (36 de entrada e 24 de saída)
• 3 portas de comunicação (1 com PC, e 2 para padrão RS485)
• Saída a relé
10

Função lógicaPortalógica
Tabelaverdade
Diagrama debloco de funções
Diagrama Ladder
AND
A B Y
0 0 00 1 01 0 01 1 1
OR
A B Y
0 0 00 1 11 0 11 1 1
NOT
A Y
0 11 0
NAND
A B Y
0 0 10 1 11 0 11 1 0
NOR
A B Y
0 0 10 1 01 0 01 1 0
XOR
A B Y
0 0 00 1 11 0 11 1 0
Tabela 2.1: Funções lógicas, em diagramas de bloco de funções e ladder
11
• Alimentação em 24 Vcc
A gura 2.8 ilustra a unidade básica do TPW-03 [7].
Figura 2.8: Desenho da unidade básica do CLP TPW-03. Extraído de [7]
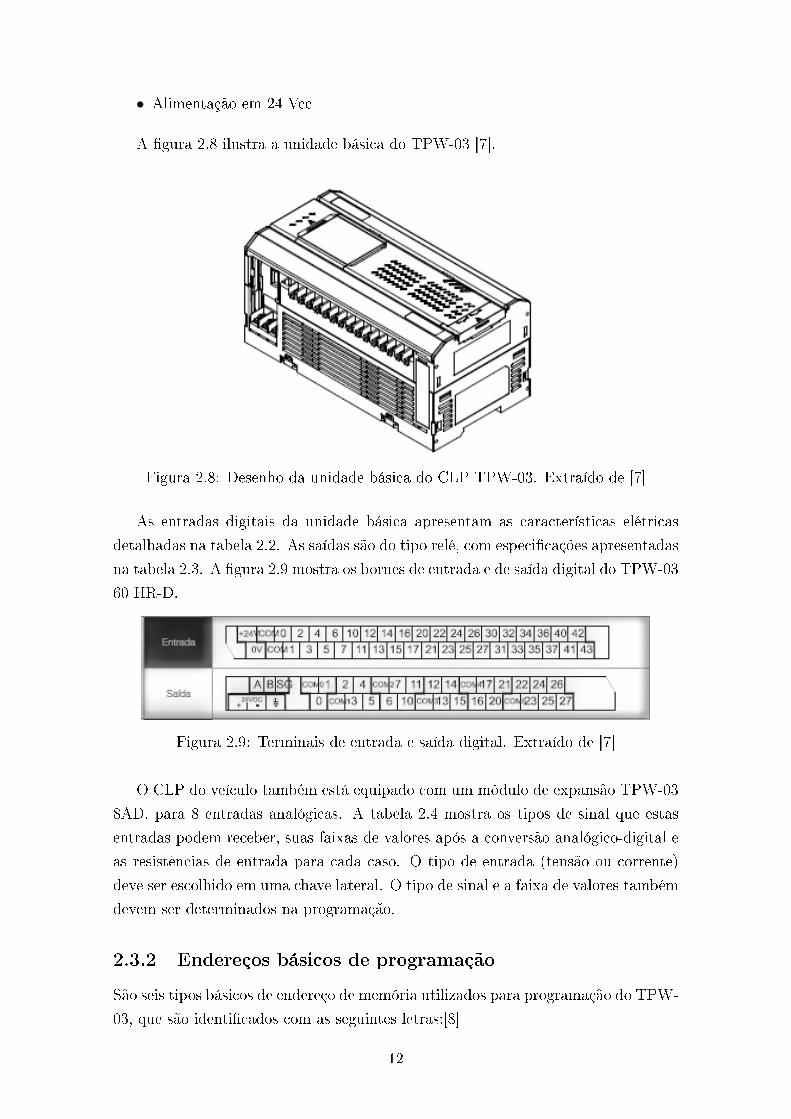
As entradas digitais da unidade básica apresentam as características elétricas
detalhadas na tabela 2.2. As saídas são do tipo relé, com especicações apresentadas
na tabela 2.3. A gura 2.9 mostra os bornes de entrada e de saída digital do TPW-03
60 HR-D.
Figura 2.9: Terminais de entrada e saída digital. Extraído de [7]
O CLP do veículo também está equipado com um módulo de expansão TPW-03
8AD, para 8 entradas analógicas. A tabela 2.4 mostra os tipos de sinal que estas
entradas podem receber, suas faixas de valores após a conversão analógico-digital e
as resistências de entrada para cada caso. O tipo de entrada (tensão ou corrente)
deve ser escolhido em uma chave lateral. O tipo de sinal e a faixa de valores também
devem ser determinados na programação.
2.3.2 Endereços básicos de programação
São seis tipos básicos de endereço de memória utilizados para programação do TPW-
03, que são identicados com as seguintes letras:[8]
12

Especicações Elétricas Diagrama EsquemáticoTipo de entrada DC (sink ou source)
Nível de tensãoO → On 15 VccOn → O 9 Vcc
Impedância de entrada 3,4kΩCorrente 6,7 - 7,2 mA/24 Vcc
Tempo de respostaO → On 1 msOn → O 2,5 ms
Isolação Foto-acoplamento
Tabela 2.2: Características das entradas digitais
Especicações Elétricas Diagrama EsquemáticoCorrente 2A/ponto (5A/COM)
Carga máximaIndutiva 100 VAResistiva 120 W
Carga mínima DC5V 1mATensão 250 Vca ou 30 Vcc
Tempo de respostaO → On 6 msOn → O 6 ms
Tabela 2.3: Características das saída digitais a relé
• X: Identica todas as entradas físicas e diretas ao CLP.
• Y: Identica todas as saídas físicas e diretas do CLP.
• T: Identica os temporizadores internos do CLP.
• C: Identica os contadores internos do CLP.
• M e S: São marcadores auxiliares que podem ser utilizados nas operações
internas do programa do CLP.
Todos os endereços mencionados acima são endereços de bit, ou seja, podem
armazenar somente dois estados (1 ou 0).
Palavras podem ser armazenadas em registradores de 16 bits, cujos endereços
são identicados pela letra D.
Há a possibilidade de se utilizarem, na programação, instruções do tipo borda de
subida ou borda de descida. Estas se diferem da instrução vericador de fechado
por carem ativas apenas durante um ciclo de varredura após o endereço associado
mudar de o para on (subida) ou de on para o (descida). A gura 2.10 mostra os
símbolos destas instruções na programação do TPW-03.
13

Tipo de sinal Faixa de conversão A/D Resistência de entradaTensão 0-10 V 0-4000 30 kΩTensão 1-5 V 0-2000 30 kΩ
Corrente 4-20 mA 0-2000 250 ΩCorrente 0-20 mA 0-2000 250 Ω
Tabela 2.4: Características das entradas analógicas
(a) (b)
Figura 2.10: Instruções por borda: (a) De subida (b) De descida
2.3.3 Contadores de alta velocidade
O TPW-03 possui 6 entradas (X000 a X005) capazes de registrar em alta frequência
o número de pulsos de nível lógico alto que lhes forem aplicados. A depender da
entrada escolhida, pode-se trabalhar com sinais de até 5, 10, 50 ou 100 kHz.
14

Capítulo 3
Sensor de velocidade e posição
Veículos tradicionais contam com sistemas que aferem a velocidade de cruzeiro di-
retamente nas partes girantes, geralmente por meios magnéticos. Em um trem de
levitação, que se movimenta sem contato com o solo e impulsionado pela força mag-
nética de um motor de indução linear, é necessário utilizar-se algum outro método
de obtenção da informação a ser levada ao mostrador do velocímetro.
A solução escolhida no projeto do MagLev-Cobra para este propósito foi o uso do
sensor óptico de velocidade e posição Correvit L-350 Aqua, do fabricante Corrsys-
Datron. Este equipamento é utilizado, dentre outras aplicações, em testes de veículos
sobre rodas em condições de deslizamento, como frenagem brusca ou aquaplanagem,
caracterizando-se por apresentar leituras de alta precisão quando utilizado sobre as
mais diversas superfícies. A tabela 3.1 apresenta algumas especicações do sensor.
Características de instalaçãoAlimentação 10...28 V
Consumo a 12 V 33 WDistância do solo 350 ± 130 mm
Níveis de proteçãoCabeça do sensor: IP67Console eletrônico: IP30
Fonte luminosa Lâmpada halógena (20 W)Características de performance
Faixa de velocidade 0,3...250 km/hResolução de distância 1,5 mmFrequência de medição 250 Hz
Sinais de saídaVelocidade: Analógico 0 -10 VDistância: Digital (TTL) 1-1000 pulsos/m
Interfaces USB, CAN, RS-232C
Tabela 3.1: Especicações do sensor Aqua L-350
Como o TPW-03 não apresenta as mesmas interfaces de comunicação que o
sensor, seus sinais de saída foram repassados a suas entradas físicas. A gura 3.1
15

mostra a parte traseira do console eletrônico do sensor.
Figura 3.1: Console eletrônico do sensor Aqua L-350. Extraído de [9]
A porta de saída é do tipo serial DB9, com os pinos 1 e 4 correspondendo à saída
analógica, e os pinos 7 e 9 à digital [9].
3.1 Função velocímetro
O sinal de velocidade é analógico de 0 a 10 V e, portanto, compatível com a entrada
analógica da expansão TPW-03 8AD, conforme mostra a tabela 2.4. O software
CeCalWin permite a programação das saídas do sensor. Optou-se por uma taxa
de 400 mV/km/h (apêndice B), que se reete em 160 pontos/km/h na memória do
registrador D8440 referente à entrada analógica A4 utilizada para receber o sinal.
A gura 3.2 apresenta as ligações do sensor no veículo.
O programa carregado no CLP do veículo consta do apêndice A. O trecho em
destaque na gura 3.3 mostra o tratamento dado ao sinal de velocidade.
À linha 0075, é realizada uma operação de divisão (função DIV) da palavra
registrada em D8440 pelo decimal 160 (decimais são marcados, na programação do
TPW-03, com um K), para que se tenha o valor de velocidade na unidade km/h.
Esta instrução é controlada pelo marcador especial M8000, que estará em nível
alto sempre que o CLP estiver em modo RUN. Logo, esta e todas as ações que
dependerem do marcador M8000 serão efetuadas em todos os ciclos de varredura. O
resultado da divisão é enviado para o terceiro argumento da função, o registrador D0.
O registro seguinte (D1) recebe o resto da divisão euclidiana. Às linhas seguintes
(83 e 91) é feito um arredondamento para o valor inteiro mais próximo, que ca
registrado em D2.
3.1.1 Disposição da informação em uma IHM
Uma interface homem-máquina do fabricante Delta Electronics, modelo DOP-B é
utilizada no veículo como painel informativo. Este dispositivo conta com comunica-
16

Figura 3.2: ligações do sensor Aqua L-350 no veículo
ção via protocolo Modbus, através do padrão RS-485[10]. Este protocolo estabelece
uma rede do tipo mestre-escravo, na qual o mestre inicia a comunicação e o es-
cravo responde a esta solicitação. Assim, deve-se estabelecer a comunicação com
a IHM atuando como mestre do CLP, requisitando seus valores de memória para
exibição e também podendo enviar dados na rede, servindo como um dos métodos
de ação do operador nos sistemas controlados pelo CLP. A conguração da interface
de comunicação dos dois equipamentos é apresentada na sequência.
A referência [7] especica o endereço D8120 do CLP como registro especial para
programação do formato de comunicação RS-485. Os parâmetros que devem ser
escolhidos são
• Comprimento da palavra - 8 bits é o padrão para o TPW-03
• Modo de transmissão Modbus - padrão para o TPW-03: RTU
• Paridade - padrão para o TPW-03: sem paridade
• Bits de parada - padrão para o TPW-03: 2 bits
• Velocidade de comunicação (baud rate) - padrão para o TPW-03: 19,2 kb/s
A gura 3.4 mostra o trecho do programa ladder em que se realiza esta congu-
ração.
17

Figura 3.3: Diagrama ladder: conversão do sinal de velocidade.
Figura 3.4: Diagrama ladder: conguração do protocolo de comunicação.
Seguindo-se as instruções da página 127 de [8], estas congurações são alcançadas
pela programação no registro D8120 do número binário 1001001, ou 137, em decimal.
Na linha 0000 do programa este valor é movido para a devida memória, bem como
se faz a conguração do registro especial D8121, que contém o endereço atual da
porta serial do CLP (padrão: 1).
No software DopSoft de programação da tela, são escolhidas as mesmas congu-
rações, como mostra a gura 3.5.
Como se vê, além das congurações de comunicação iguais às escolhidas
para o CLP, deve-se denir modo mestre e especicar como se deseja acessar os
endereços do escravo. No presente caso, escolheu-se endereço em hexadecimal. O
manual [7] relaciona todos os diversos tipos de memória e seu valores para comunica-
ção Modbus utilizando endereço hexadecimal. Para a presente aplicação, destaca-se:
Tipo de word Endereço Modbus hexadecimal
D0-D8511, valor atual 4338H-6477H
Com isso, pode-se enviar a palavra do registro D2 para a tela através da pro-
gramação da leitura do endereço 433A, e, assim, poderá ser exibida a velocidade do
18

Figura 3.5: Conguração da comunicação da tela DOP-B
veículo em km/h num velocímetro virtual (gura 3.6).
Figura 3.6: Tela exibida no painel informativo
3.2 Função odômetro
O sinal digital de posição fornecido pelo sensor é também uma informação de grande
interesse para os sistemas do veículo. Dentre as possíveis aplicações do sensoriamento
de posição, estão:
19
• Função de odômetro, armazenando na memória do CLP a distância percorrida
em um dia de operação.
• Constatação de uma viagem completa, possibilitando a automação do aci-
onamento de mecanismos como abertura de portas e ancoramento do freio
mecânico.
• Variável a ser monitorada numa possível implementação futura de esquema de
condução automática do veículo.
Conforme exposto na tabela 3.1, a informação é enviada em forma de pulsos
digitais TTL. Este tipo de saída apresenta a tensão de nível lógico baixo numa
faixa de 0 a 0, 8V e de nível alto, de 2, 2 a 5, 0 V . Observando-se o sinal com o
auxílio de um osciloscópio numa bancada de teste, pôde-se vericar que os valores
de nível alto e baixo se situam em faixas bem mais estreitas em torno de 5 V e 0 V ,
respectivamente. Numa topologia fornecedora de corrente, este tipo de saída pode
trabalhar com valores até 100 mA.
3.2.1 Interface com o CLP
O ajuste escolhido para a saída digital foi 50 pulsos por metro. O apêndice B traz
alguns cálculos que justicam esta opção. Como se deseja entrar com este sinal numa
entrada digital do TPW-03 (mais especicamente, numa entrada com a função de
contador de alta velocidade), é necessário ter níveis de tensão como os que constam
da tabela 2.2, ou seja, acima de 15 V para nível alto.
Um transistor NPN na conguração coletor aberto realizaria a função de con-
verter os níveis lógicos, recebendo na base o sinal TTL e transitando, de acordo
com esta entrada, entre os estados de saturação e corte, realizando o chaveamento
da tensão da bateria sobre um resistor conectado ao coletor.
No entanto, é preferível que se utilize um fototransistor, de forma a conferir ao
circuito a característica de isolação elétrica entre a bateria e o sensor, por medida
de segurança para o instrumento. Na gura 3.2 também está ilustrado este circuito
de interface, com o uso do opto acoplador 4N25.
A escolha dos resistores para o circuito de interface foi feita considerando, inici-
almente, a corrente no LED do optoacoplador:
If =5− 1, 3
1000= 3, 7mA (3.1)
Sendo 1, 3 V um valor típico de tensão no LED para ativar o fototransistor, de
acordo com a folha de dados do 4N25. O resultado de 3.1 é seguro para o sensor e
adequado, também, para o LED.
20

Para garantir a saturação do fototransistor, a corrente de coletor deveria ser
menor do que a corrente no LED multiplicada pela taxa de transferência de corrente
do optoacoplador, parâmetro que depende não linearmente da corrente no LED,
da tensão aplicada ao coletor e da temperatura. Contudo, o resistor conectado ao
coletor do fototransistor não poderia ser de valor muito elevado, considerando que
o sinal deveria ainda ser lido pela entrada digital do TPW-03, cuja resistência de
entrada é 3, 4 kΩ. O valor de 2, 7 kΩ foi determinado de maneira empírica, sendo
aquele elevado o suciente para que o fototransistor pudesse entrar na saturação (e,
portanto, responder ao sinal do sensor) e, ao mesmo tempo, reduzido o bastante
para poder oferecer leitura ao CLP.
O coletor do fototransistor é ligado à entrada digital X5 do TPW-03, habilitável
para a função de contador de alta velocidade.
3.2.2 Resultado e discussão do sensoriamento de posição
Na linha 0114 do programa ladder, tem-se a habilitação do contador C240, que
corresponde à entrada X5. Na linha 0120, há a instrução para que este contador seja
zerado após o pulso do marcador especial 8002. Este marcador interno é ativado
apenas no primeiro pulso de varredura do CLP em modo Run. Dessa forma, a
memória C240 do CLP registrará o número de pulsos enviados pelo sensor, cada
pulso correspondendo a 2 cm percorridos (ver apêndice B). Como, a cada vez que o
CLP for ligado (o que se faz no começo de um dia operação), a contagem será zerada,
o resultado será o registro da distância percorrida em um dia de demonstração do
veículo.
Um problema observado tanto ao se testar o sensor Aqua L-350 na bancada de
laboratório, quanto ao se monitorar o programa no CLP, foi o disparo involuntário
do sinal digital, sob a forma de trens de pulsos em alta frequência, em situação de
repouso. Este problema impede que se aproveite o sinal de posição para qualquer um
dos propósitos listados anteriormente: o odômetro passa a contabilizar distâncias
indevidas, e os mecanismos de automação que utilizariam a informação de posição
do veículo na via (abertura automática de portas, frenagem automática), por en-
volverem segurança, não devem, por ora, ser implementados, ainda que o problema
aparentemente não se manifeste com o sensor em movimento.
Se futuramente for possível corrigir esse contratempo através de manutenção ou
recalibração do sensor, poderão ser adicionadas as linhas da gura 3.7 ao programa
do CLP
O contador C240 seria levado a nível alto a cada vez que contasse 10.000
pulsos, correspondentes aos 200 m da via (o número é, de certa forma, ilustra-
tivo; a quantidade exato de pulsos correspondente a uma viagem deveria ser
21

Figura 3.7: Uso da informação correta de posição no CLP
determinada experimentalmente). A cada pulso em C240, este contador zeraria
a si próprio, de forma a poder contar a próxima viagem, e daria um pulso num
outro contador, C0. Na programação da IHM, poderia ser incluído um mostrador
com o valor armazenado em C0 (número de viagens no dia) ou em D4 (distân-
cia percorrida no dia em metros, dada pelo número de viagens multiplicado por 200).
Observações:
• O contador C0 é não retentivo, de forma que não precisaria ser resetado com
o pulso M8002, como se faz com o contador de alta velocidade
• O uso de contadores requer que se estabeleça um limite, após o qual o contador
vai a nível alto e os pulsos não são mais contados. O valor de 10.000 foi
escolhido como arbitrariamente alto para um único dia, de forma a permitir a
contagem de todas as viagens.
O pulso em C240, se atestada para além de qualquer dúvida a precisão da con-
tagem, poderia também acionar a abertura de portas (ver capítulo 4), ou o aciona-
mento do freio mecânico.
Outra opção para automatizar estes sistemas relacionados à chegada do veículo
na estação seria algum tipo de m de curso (mecânico ou óptico) localizado nos
extremos da via. No entanto, a informação não poderia ser processada pelo CLP
embarcado, uma vez que seria obtida externamente, não havendo, por enquanto, a
possibilidade de comunicação sem o com o TPW-03.
22

Capítulo 4
Automação dos mecanismos
auxiliares do veículo
Neste capítulo serão apresentadas algumas soluções de automação já implementadas
para sistemas do veículo e da estação. Também serão discutidas tarefas futuras que
possam ser automatizadas com o uso de CLP. Os mecanismos a seguir podem ser
considerados auxiliares: não interferem diretamente na locomoção ou na levitação
do veículo, mas contribuem para o conforto e segurança dos passageiros e da equipe.
4.1 Portas do veículo
As portas para embarque e desembarque de passageiros no veículo puderam ser
automatizadas com o uso do CLP, no sentido de que seu acionamento passou a
requerer apenas um toque, como em um acionamento com contato de selo. Mais
do que dispensar o comando manual de uma botoeira, o esquema permite que a
abertura e fechamento de portas seja controlada por um computador. Com isso,
outras formas de acionamento são possíveis, como pela comunicação entre a IHM
e o CLP, ou de forma totalmente automática, por constatação de viagem completa
(seção 3.2.2).
As portas são acionadas por motores CC de imã permanente, de 24 V, 45 W.
Como as saídas a relé do CLP estão limitadas a 2 A/ponto, estes motores, de
corrente nominal 5,4 A (chegando a 18 A no torque máximo), demandaram o uso de
contatoras como interface entre o CLP e a parte de potência. A gura 4.1 apresenta
a ligação dos circuitos de comando e de potência para acionamento automático das
portas do veículo.
A gura 4.2 destaca do programa no apêndice A o comando de fechamento das
portas (linha 0067).
Um pulso em X3 aciona a saída Y7, que aciona a contatora K2, se as portas não
23

A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
ME
A
B
M
MD
A
B
M
24
VC
C
K1
1 3
2 4
K2
1 3
2 4
FC2
21 14
22 13
FC3
21 14
22 13
FC1
21 13
22 14
FC4
21 14
22 13
24
VC
C
G
13
14
R
13
14
R
11
12
G
11
12
K1
A1
A2
K2
A1
A2
K2
5
6
K2
13
14
K1
5
6
K1
13
14
24
VC
C
Y0 Y7
COM 0 COM 2
X4 X3
COM(ENTRADA)
X10
X2
Legenda:
ME: motor lado esquerdo
(de dentro do veículo)MD: motor lado direito
G: botão verde
R: botão vermelho
Circuito de potência Circuito de comando
A: terminal verde do motor
B: terminal marrom do motor
24
VC
C
Figura 4.1: Circuito das portas e ligações com TPW-03
estiverem já fechadas (contato NF X2), e se a contatora K1 não estiver acionada
(contato NF Y0), o que geraria um curto-circuito. Um contato NF Y7 em paralelo
com X3 faz a lógica de selo, e apenas quando os contatos NF de ambas as chaves de
m de curso de fechamento (FC2 e FC3, na gura 4.1) comutarem, Y7 vai a nível
baixo. No entanto, como é comum que uma das portas termine o ciclo antes da
outra, cada motor também é desligado individualmente pela comutação do contato
normalmente fechado do respectivo m de curso (FC2 para a porta da esquerda,
FC3 para a da direita), mesmo que a contatora K2 ainda não tenha comutado. Com
isso, evita-se o desalinhamento das portas, e, o que seria pior, a alta corrente no
motor que estivesse travado e continuasse energizado.
O acionamento no sentido de abertura segue lógica bastante semelhante como é
mostrado à linha 0058 (gura 4.3.)
Há um elemento a mais, o contato NF M20. Este vem de um teste lógico efetuado
na linha 0106, e assumirá valor lógico alto (e, portanto, impedirá a abertura) sempre
que o sinal de velocidade for maior do que 50 pontos no registro D8440, o que equivale
a 0, 3125 km/h. Não se optou por estabelecer um valor mais baixo para o limite
de velocidade para intertravamento da abertura de porta pois, em função de algum
24

Figura 4.2: Diagrama ladder: fechamento de portas.
Figura 4.3: Diagrama ladder: abertura de portas.
ruído ou erro de leitura, o registro poderia não car exatamente em 0, impedindo o
acionamento mesmo com o veículo parado.
As entradas X3 e X4 podem ser pulsadas por botões físicos vermelho e verde,
respectivamente, conforme mostrado na gura 4.1. Estes botões também apresen-
tam intertravamento através de blocos auxiliares de contato, que complementam o
intertravamento entre as linhas 0058 e 0067. Nota-se, que, com os ramos de saída do
CLP em paralelo aos ramos de acionamento por botão, é possível ligar as contatoras
e movimentar as portas mesmo com o CLP desligado, com a perda da caracterís-
tica automática, logicamente. Dessa forma, tem-se um esquema que não impede a
operação das portas em caso de falha no CLP.
Na conguração da tela do painel informativo (gura 3.5), foram incluídos bo-
tões virtuais que ativam os endereços de X3 e X4 na memória do CLP, através da
comunicação pelo protocolo Modbus. Destaca-se, aqui, o endereço hexadecimal a se
programar a escrita de bit[7]:
Tipo de bit Endereço Modbus hexadecimal
X0-X377 0000H-00FFH
Portanto, foram utilizados os endereços 0004 para o botão verde (abrir), 0003
para o botão vermelho (fechar) e 0007 para o botão interromper, que para imedi-
atamente o movimento das portas. Como a IHM está instalada próxima ao painel
de condução do veículo, o controle das portas pelo condutor se torna, desta forma,
mais cômodo.
25
O marcador M5, quando em nível alto, impede tanto a abertura quanto o fecha-
mento das portas. Este marcador, como se vê na linha 0056 (apêndice A), é ativado
pela entrada digital X7. O botão virtual interromper congurado na IHM ativa X7
e para qualquer movimento das portas caso, por exemplo, haja algo as obstruindo e
o acionamento automático tenha sido efetuado. Escolheu-se usar uma entrada física
para controlar o marcador M5 para que se tenha também a possibilidade de incluir
uma botoeira de emergência, ligada ao terminal de X7, com a mesma função.
4.2 Portas das estações
Um sistema que não foi explorado mas que se beneciaria do projeto de um esquema
de automação seria a abertura de portas das estações. Para isso, dois são os desaos:
1. Garantir que o sinal de posição do sensor Aqua L-350 permita a detecção
precisa de uma viagem completa, como discutido na seção 3.2.2.
2. Acionar a porta da estação de maneira remota. Atualmente, isto já é feito pelo
condutor por meio de uma chave com comando por radiofrequência. Portanto,
seria necessário fazer a saída digital do CLP atuar sobre uma cópia do circuito
da chave.
Uma alternativa seria o uso de ns de curso indicando a chegada do veículo à
estação, partindo destes pontos a informação que acionaria o comando por radio-
frequência.
4.3 Freio mecânico
O freio mecânico do veículo tem como função a parada completa do trem na estação e
serve, também, como freio de emergência no caso de falha dos esquemas de frenagem
elétrica, os quais funcionam por redução da frequência de alimentação do motor e
por injeção de corrente contínua.
4.3.1 Descrição do sistema
A frenagem se dá por meio da ancoragem de sapatas no secundário do motor linear.
A posição natural das sapatas é a de parada, de forma tal que, numa falta de
energia no banco de baterias, o veículo não possa se mover, ao invés de não poder
frear. Um sistema de óleo sob pressão, cujo detalhamento está além do escopo
deste trabalho, é capaz de, ao ser acionado, retirar as sapatas da posição de atrito
com o secundário, liberando o trem para se movimentar. A gura 4.4 esquematiza o
26

acionamento do freio mecânico. Dois botões cogumelo (denominados CT1 e CT2 por
estarem localizados nos painéis nas extremidades do veículo) são ligados em série,
com qualquer um deles podendo interromper o mecanismos de recuo das sapatas,
provocando a ancoragem do trem no secundário.
Figura 4.4: Acionamento do freio mecânico
4.3.2 Pressurização automática do óleo de freio
Com o mecanismo de recuo das sapatas energizado, ou seja, com os dois botões de
frenagem mecânica desacionados, o freio só será efetivamente solto se houver pressão
suciente no óleo da unidade hidráulica.
Após seguidos ciclos de operação do freio, a carga no acumulador de óleo se
perde. Uma bomba de óleo está instalada para pressurizá-lo quando necessário,
permitindo novo recuo dos cilindros. Como há um pressostato instalado no tanque
de óleo, é possível monitorar a pressão do uido, a m de se ligar a bomba quando
o freio estiver solto mas com pressão insuciente para uma nova restituição após
a frenagem seguinte. A pressão mínima para recuar o cilindro é, de acordo com o
projeto da unidade hidráulica, 60 bar.
O pressostato, do fabricante GEFRAN[11], modelo TK-E-1-E-B02-C-M-V, for-
nece um sinal de corrente de 4 a 20 mA, correspondente à leitura de sua escala de
0 a 160 bar. Este instrumento deve ser conectado à fonte de alimentação (bateria)
e seu sinal de corrente é ligado à entrada A0 da expansão analógica TPW-03 8AD,
que está congurada para receber sinais de corrente de 4 a 20 mA (linha 0017 do
27

programa, gura 4.5). O endereço correspondente à entrada é D8436. A gura 4.6
mostra as conexões elétricas.
Figura 4.5: Diagrama ladder: conguração para recebimento do sinal analógico decorrente (pressostato).
Figura 4.6: Ligação do transdutor de pressão ao CLP
Foram efetuados testes com amperímetro digital ligados à saída do pressostato
de forma a se reconhecer o valor de corrente correspondente à pressão mínima de
recuo do cilindro, através de sucessivos acionamentos do freio. Feito isto, foi acio-
nada a bomba de óleo até que a pressão não mais aumentasse e foi anotada a leitura
analógica do sensor. Este valor estabelece o parâmetro que o CLP terá para inter-
romper a pressurização, de forma a não se ter gasto excessivo da carga da bateria
(a bomba de óleo é uma das maiores cargas no interior do veículo, com 2,2 kW) e
nem riscos de vazamento de óleo.
A gura 4.7 apresenta o trecho do programa ladder referente à pressurização
automática.
Na linha 0029, é executado um teste lógico de comparação entre o sinal do
pressostato e o decimal 420, correspondente a 7,36 mA, ou 58,88 bar. Se a pressão
for menor, o marcador M100 é ativado; se for igual, M101 vai a nível alto. O sistema
de pressurização deve atuar apenas quando o veículo não estiver ancorado, uma vez
que, como explicado anteriormente, o sistema atua recuando o cilindro de freio, de
forma que a pressão vai naturalmente a zero com a frenagem, sem que se deva efetuar
nenhuma correção. A informação de posição do freio é dada ao CLP pela entrada
X6, exibida na gura 4.4, que estará em nível baixo sempre que o veículo estiver
ancorado.
Pela instrução da linha 0045, pode-se ver a lógica: se M100 ou M101 estiver em
nível alto e se o freio estiver solto, aciona-se o temporizador TO. Esta saída espera
28

Figura 4.7: Diagrama ladder: pressurização automática de óleo de freio.
1 segundo antes de ir a nível alto, quando aciona a saída física Y2 (linha 0054).
Seus contatos energizam a bobina de uma contatora, que liga a bomba (gura 4.8).
O tempo de espera antes do acionamento da bomba é para garantir que o sistema
mecânico já tenha completado seu movimento e, portanto, que a leitura de pressão
do óleo seja a de um valor de regime permanente.
Na linha 0037 do programa, tem-se a instrução de comparar a pressão com o
patamar superior de 497 (correspondente a 7,976 mA ou 63,808 Bar), enquanto a
bomba estiver acionada. Se a pressão for menor, o marcador M200 vai a nível alto.
Voltando à linha 0045, vê-se um terceiro caminho em paralelo: se a pressão estiver
acima de 58,88 bar (M102 ON) e abaixo de 63,808 bar (M200 ON) e se o freio estiver
solto, o temporizador segue em nível alto e mantém a bomba acionada. Quando o
teste lógico da linha 0037 retornar falso, M200, M100 e M101 estarão em nível
baixo e, da mesma forma, T0 e Y2, desligando a bomba. Os valores de comparação
de pressão passaram por um ajuste no, já com o sistema implementado e com o
programa do CLP sendo monitorado em tempo real.
Na gura 4.8 também é possível observar a presença de duas botoeiras normal-
mente abertas em paralelo com a saída digital do CLP. Estes interruptores, deno-
minados CT1 e CT2 por estarem localizados nos dois painéis nas extremidades do
veículo, permitem o acionamento manual da bomba, em caso de alguma falha no
29

A
A
B
B
C
C
D
D
E
E
F
F
G
G
H
H
1 1
2 2
3 3
4 4
5 5
24
VC
C
0 V
COM 1
Y2
CT1
13
14
CT2
13
14
K
A1
A2
K
1 3 5
2 4 6
M
M DE ÓLEO
Circuito de comando Circuito de potência
BOMBA
Figura 4.8: Comando da bomba de óleo
CLP.
4.4 Sistema de abastecimento automático de nitro-
gênio líquido
Os criostatos são compartimentos em que cam alojadas as cerâmicas do sistema de
levitação magnética supercondutora. Estes equipamentos têm como função isolar
termicamente o material supercondutor, resfriado com nitrogênio líquido (LN2) a
aproximadamente -196 C, do meio externo.
A fonte de nitrogênio líquido é um tanque cilíndrico com capacidade de 1800
Litros instalado na área externa à estação de operação do veículo onde há uma
tubulação isolada que leva o uido pressurizado (1.5 bar) até o ponto de abasteci-
mento. Válvulas solenóides normalmente fechadas são os atuadores que liberam e
bloqueiam o enchimento dos criostatos.
A referência [3] apresenta uma proposta de sistema de automação da tarefa
de suprimento de nitrogênio nos 24 criostatos do veículo. A execução manual do
abastecimento de nitrogênio é possível, mas apresenta os seguintes inconvenientes:
• Necessidade de pelo menos dois operadores, um em cada lado do veículo, para
30

fechar as válvulas de abastecimento quando os criostatos estiverem cheios de
nitrogênio líquido.
• Risco de ferimento do operador ao entrar em contato com um uido criogênico.
• Desperdício de LN2, uma vez que há várias válvulas para se fechar ao mesmo
tempo e o critério para parar o abastecimento é a observação visual da fuga
de líquido pela saída de ventilação do criostato.
4.4.1 Método de detecção de nível de LN2
De acordo com o mesmo trabalho, as opções para medição de nível de nitrogênio
dentro da câmara dos criostatos seriam:
• Chave de nível tipo bóia
• Chave de nível capacitiva
• Chave de nível condutiva
• Sensor de pressão de fundo de poço
• Sensor óptico de nível
• Indicador de nível externo (tipo régua)
Foi observado, no entanto, que nenhum desses sensores de nível disponíveis no
mercado possuía dimensão adequada para instalação dentro de um criostato, nem
capacidade para trabalhar a temperaturas próximas a -200 C
Sabendo que o gás de saída na ventilação do criostato possui temperatura dife-
rente do líquido no interior, foi desenvolvido um meio de detectar quando o volume
estiver preenchido. Foi necessário utilizar um sensor de temperatura para vericar
quando o uido de saída atingia a temperatura de -196 C. Assim, quando líquido
começa a verter pela tubulação de saída do criostato, este sensor pode detectar sua
presença e, desta forma, indicar nível cheio. Este método tem como grande vanta-
gem o fato de não ser invasivo, por fazer a medição no exterior do criostato, sem
danicar o isolamento a vácuo. A leitura da temperatura dos gases de ventilação
fornece, também, uma indicação do quão perto está o reservatório da sua capacidade
máxima no momento do abastecimento.
A gura 4.9 é resultado de observação, utilizando um multímetro com função
termômetro, da evolução da temperatura de saída dos gases de um criostato até o
aparecimento de líquido.
É possível observar o surgimento de um degrau quando o líquido começa a sair
pelo tubo de ventilação do criostato. Este degrau é a região de interesse. O sensor
31

Figura 4.9: Análise da temperatura dos gases de saída do criostato. Extraído de [3]
de temperatura utilizado, então, foi uma termorresistência (Resistance Temperature
Detector - RTD) PT100, juntamente com um transmissor de temperatura Novus
modelo TX, equipamento cuja função é linearizar o sinal e levá-lo à faixa de leitura
desejada (4 a 20 mA).
4.4.2 Automação do processo com TPW-03
Conhecido e testado o método de constatação de abastecimento completo, o trabalho
propõe uma rotina de automação, baseada no mesmo CLP WEG TPW-03 60-HR-D
apresentado no capítulo 2. A gura 4.10 apresenta o esquema de automação de uma
válvula de abastecimento.
Figura 4.10: Esquema básico de automação de válvula de abastecimento. Extraídode [3]
A gura 4.11 mostra o diagrama ladder para a automação de uma única válvula.
A proposta do trabalho é de se controlar o processo de abastecimento por uma
IHM. Desta forma, a memória M1 deve ser acionada virtualmente pelo operador
32

Figura 4.11: Diagrama ladder de automação de válvula de abastecimento. Extraídode [3]
para que a válvula ligada à saída Y5 seja aberta, possibilitando o abastecimento,
até ser fechada quando a temperatura lida na expansão analógica atingir um valor
desejado.
Para controlar o abastecimento de todos os criostatos, são necessárias 4 expansões
analógicas, para monitorar 24 sinais de temperatura, além de serem usadas 24 saídas
digitais, de forma tal que a instalação de um TPW-03 60-HR-D unicamente dedicado
para esta função se faria necessária.
A gura 4.12 mostra a tela na IHM que faria o controle do abastecimento de
cada criostato.
Figura 4.12: Tela de painel interativo para controle de abastecimento. Extraído de[3]
Por m, é feita uma comparação do tempo de abastecimento manual e apenas
pela ação da gravidade com a operação automatizada e com o uido sob pressão,
33

reproduzida na gura 4.13, em que se verica a enorme economia de tempo com o
segundo método.
Figura 4.13: Abastecimento manual por gravidade em comparação a automáticopressurizado. Extraído de [3]
Atualmente, o uido escoa sob pressão, mas o esquema completo de automação
como apresentado ainda está em fase de implementação.
34

Capítulo 5
Contribuição ao enquadramento à
norma APM
5.1 Movimentador automático de pessoas
Um movimentador automático de pessoas, ou Automated People Mover, é denido
como um meio de transporte, com operação totalmente automatizada, composto
de veículos que transitam em vias de operação exclusivas[12]. Diversas tecnologias
podem se enquadrar na categoria APM, como os monotrilhos (monorails), os veículos
leves sobre trilhos (light rails) e, também, os Maglevs.
O movimentador automático de pessoas mais comum na vida cotidiana é, cer-
tamente, o elevador de passageiros. Com sua tecnologia diariamente posta à prova
ao longo de décadas nos centros urbanos, este equipamento faz viagens totalmente
automáticas, repletas de controles e requisitos de segurança, se tornarem algo usual
e até mesmo corriqueiro. Ao mesmo tempo que o exemplo de sucesso estimula o
uso de tecnologias de automação para outros métodos de transporte, deve-se aten-
tar para a necessidade de também ser replicado, nas novas aplicações, todo o rigor
técnico que garante uma operação conável, eciente e segura. Para isso, deve-se
sempre optar pelos padrões referendados por órgãos de normatização.
A American Society of Civil Engineers (ASCE) elaborou a norma Automated
People Mover Standards estabelecendo os requisitos mínimos para se atingirem níveis
aceitáveis de segurança e de performance de um APM. Tem-se, também, a norma
brasileira (ABNT) a tratar do tema, a NBR 16074, de 2012.
35

5.2 Itens da norma relacionados aos mecanismos
auxiliares do veículo
A referência [2] apresenta um extenso estudo dos vários componentes e procedi-
mentos de operação e manutenção do veículo MagLev-Cobra à luz dos requisitos
da norma americana. É feita a exposição de cada item da norma acompanhado de
comentários sobre a abordagem utilizada no projeto e sobre possíveis adequações
necessárias.
Nesta seção, serão, da mesma forma, abordados alguns itens da norma, mas
apenas aqueles que guardam relação com mecanismos de automação explorados ao
longo do presente trabalho.
5.2.1 Controle Automático do Trem (ATC - Automated Train
Control)
O capítulo 5 da norma trata do sistema de controle automático do trem e o divide
em:
• Proteção Automática do Trem (Automatic Train Protection - ATP)
• Operação Automática do Trem (Automatic Train Operation - ATO)
• Supervisão Automática do Trem (Automatic Train Supervision - ATS).
O item 5.1.3 da norma trata da obrigatoriedade de sistema ATP de detecção
de movimentos não intencionais. Conforme discutido no capítulo 3 e no apêndice
B, o sinal de posição do sensor Correvit Aqua L-350 pode ser ajustado para qual-
quer resolução desejada em sua faixa de operação, de forma a detectar movimentos
signicativos. O pulso disparado poderia ser recebido pela entrada digital do CLP
através do circuito de interface. Instruções no CLP levariam uma saída a nível alto
caso houvesse contagem de pulsos de distância sem que fosse dada partida no in-
versor (neste caso, seria necessária, também, a comunicação pelo protocolo Modbus
entre o CLP TPW-03 e o inversor CFW-11). Esta saída acenderia uma lâmpada de
aviso, ou faria soar um alarme sonoro. Contudo, o disparo involuntário do sensor é
um impeditivo à implementação imediata deste sistema.
O item 5.1.4 prevê sistema de proteção contra sobrevelocidade. Em [2], atenta-
se para o fato de que o inversor CFW-11 possui parâmetros para limitar a velocidade
e sugere-se que se façam testes para determinar um valor seguro de operação. A
contribuição que se pode propor é a inclusão do sinal analógico como uma proteção
redundante, sendo recebido pelo CLP e comparado com o valor máximo estipulado.
36

Outro sistema APM é objeto do item 5.1.5, que dispõe sobre o uso de proteções
de m de curso com o objetivo de evitar colisões do trem com o m da plataforma.
A abordagem proposta pelo autor para o MagLev é o uso de ns de curso mecâ-
nicos em redundância com o sensor óptico, com programação destes sistemas para
detecção de falha de posicionamento. Conforme já discutido no capítulo 3, o sinal
de posição do sensor Aqua L-350, sendo registrado pelo contador de alta velocidade
do CLP, pode dar a informação precisa de varredura de um comprimento completo
da via, se prestando a realizar a função de indicador de m de curso ou de falha de
posicionamento.
O item 5.1.7 trata da perda de sinal de proteção, determinando que, num APM,
todos os sinais críticos para as funções de ATP devem ser contínuos ou de uma
natureza tal que a interrupção do sinal repetitivo seja detectada. A contribuição
deste trabalho para cumprimento do requisito se limita aos sinais de velocidade e
posição do sensor Correvit Aqua L-350. Como deve haver tensão na entrada referente
ao sinal analógico e contagem de pulsos no contador de alta velocidade sempre que o
veículo estiver em movimento, a comunicação entre CLP e inversor permitirá que se
identique o erro, caso algum destes sinais esteja sem resposta mesmo com o motor
energizado.
O item 5.1.8 refere-se à detecção de velocidade zero e estabelece que, em siste-
mas APM em que é necessária esta informação para parar os trens, este requisito
deve ser uma função de ATP. A abordagem para o MagLev, conforme discutido
em [2], é de que a velocidade zero deve ser detectada pelo sensor óptico para o
acionamento da ancoragem do veículo por meio do freio mecânico, fazendo-se neces-
sária, ainda, a realização de testes de vericação. Como contribuição para este item,
pode-se armar que o sinal de velocidade enviado para a expansão analógica do CLP
tem oferecido leituras conáveis, sendo inclusive utilizado para intertravamento da
abertura de portas (linha 0058, apêndice A) e que, portanto, um sistema de anco-
ragem dependente da velocidade zero já poderia ser implementado. As guras 5.1
e 5.2 ilustram, respectivamente, a ligação necessária no circuito de acionamento do
freio mecânico e as linhas a se incluir no programa ladder para que o freio só possa
ser acionado com velocidade nula (ou, mais precisamente, abaixo de 0,0125 km/h,
correspondente ao decimal 2 no registro D8440, escolhido para a comparação.
Um caminho em paralelo manteria o freio solto sempre que uma saída (por
exemplo, Y5) estivesse em nível alto. Esta saída teria seu estado lógico controlado
pelo teste de comparação com um limiar de velocidade de 2 pontos no registro D8440,
ou 0,0125 km/h. Escolheu-se este valor uma vez que, sempre que se observou o
programa em tempo real com o veículo parado, o registro D8440 não se mantinha
constantemente em 0, mas oscilava até 2.
O item 5.1.9 trata da proteção automática contra abertura indevida de portas.
37

Figura 5.1: Acionamento do freio mecânico apenas com detecção de velocidade zero
Figura 5.2: Implementação no CLP do intertravamento de acionamento do freio coma velocidade
Conforme discutido na seção 4.1, o acionamento de portas pelo CLP já possui a
característica de não permitir abertura quando a velocidade for superior a 0, 3125
km/h. Além disso, o fato de os ns de curso estarem ligados ao CLP fornece a
informação a se controlar: se uma das folhas de porta não estiver em posição fechada,
X2 estará em nível baixo, o que deverá gerar algum tipo de aviso ou ordenar parada
de emergência, caso não tenha sido registrada ordem de abertura na entrada X4.
Em 5.2.3, há a indicação para controle e tempo de espera de porta, com a
determinação de que as portas do trem e da estação devem abrir e fechar juntas e
que, se após um comando de fechamento ou abertura a porta demorar mais que 10s
para obedecer, um alarme deve ser dado para a central de controle.
A gura 5.3 mostra uma possível implementação para o controle do tempo de
espera para o movimento de abertura (o caso de fechamento é analógo).
Após uma ordem de abertura (pulso em X4) e enquanto as portas estiveram
em posição fechada (X2) um marcador interno ordena contagem de T1. Após 10
segundos (cada unidade corresponde a 100 ms), T1 vai a nível alto, energizando a
saída Y20, que deverá emitir algum tipo de alarme.
38

Figura 5.3: Tempo de espera de abertura de portas do veículo
5.2.2 Equipamentos elétricos
O capítulo 9 da norma versa sobre os equipamentos elétricos de um APM.
O item 9.1.1 trata da segurança dos equipamentos, determinando que os pas-
sageiros, operadores e pessoal de manutenção, bem como a equipe de socorro de-
vem estar protegidos do contato com tensões que possam ferir ou matar. A luz
azul (ferroviária) deve indicar o perigo. A abordagem de segurança utilizada no
MagLev-Cobra, segundo [2], é:
os trilhos de energia energizados com 534 VCC são protegidos contra contato
humano. As luzes azuis ferroviárias não foram previstas.
Embora não se trate de um sistema de automação, cabe ressaltar as atualizações
feitas na linha de testes neste sentido:
• Luzes vermelhas estão instaladas próximas ao barramento de alimentação, se
acendendo com ligação do painel reticador que alimenta os trilhos.
• Para assegurar um segundo estágio de segurança, um disjuntor motor controla
a ligação ao barramento. Voltímetros de ferro móvel instalados nos extremos
da via estão ligados aos trilhos, alertando a equipe sobre a efetiva energização
dos trilhos.
5.2.3 Monitoramento operacional
No capítulo 16, o último da norma APM, dene-se que um programa operacional
deve ser desenvolvido e implementado para monitorar o sistema. Um dos elemen-
tos exigidos está descrito no item 16.8, que requer um programa para materiais
perigosos. De acordo com [2] a abordagem feita no MagLev-Cobra acerca do tema
é:
39

Além dos materiais típicos de veículos elétricos, o MagLev-Cobra conta com o
trilho de ímãs e com o abastecimento de LN2, ambos potencialmente perigosos, o
primeiro, por risco de atrair partes metálicas podendo provocar esmagamentos, o
segundo, por risco de contato direto provocando queimaduras.
No que tange aos riscos para equipe envolvendo o abastecimento de LN2, deve-se
citar o trabalho [3], já discutido na seção 4.6. Um sistema totalmente automático de
abastecimento reduziria sensivelmente o perigo, uma vez que os operadores teriam
contato mínimo com o uido criogênico, podendo o controle de cada criostato ser
feito por uma IHM.
40

Capítulo 6
Conclusões e trabalhos futuros
6.1 Conclusões
O trabalho permitiu que se tenha clareza quanto ao potencial de avanço na área de
automação nos sistemas do veículo MagLev-Cobra.
Fortalecem essa constatação os mecanismos já implementados, como o controle de
portas e de pressurização de óleo de freio, mas são diversos os sistemas que podem se
beneciar de estratégias de automação, como o abastecimento de nitrogênio líquido,
ou a ancoragem do freio mecânico e abertura de portas do veículo e da estação
a partir da constatação de viagem completa pelos mecanismos de sensoriamento.
Tanto para os esquemas atuais quanto para os projetos futuros, controladores lógicos
programáveis surgem como a ferramenta de escolha imediata, pela robustez advinda
de serem projetados para o ambiente fabril, e pela facilidade de se aplicá-los aos
circuitos de acionamento e comando já implementados desde o começo da operação
do veículo.
O mais signicativo avanço que se pode visualizar em termos de automação é
tornar o MagLev-Cobra um APM, possibilitando a redução do envolvimento humano
direto em várias etapas de seu funcionamento, com a substituição dos controles
manuais por mecanismos de operação, proteção e supervisão automáticos. São claros
os desaos, como se pode constatar a partir da análise da norma APM, mas este
deve ser entendido como um objetivo alcançável e que contribuiria ainda mais não só
para o conteúdo técnico, mas também para a atratividade do projeto, cujo principal
objetivo, na fase atual, é de divulgação da tecnologia.
6.2 Trabalhos futuros
Algumas possibilidades de trabalhos na área de automação do MagLev-Cobra são
a implementação prática daqueles sistemas descritos ao longo deste trabalho como
41

etapas futuras, por serem dependentes da realização de baterias de testes, instalação
de novos equipamentos ou do desenvolvimento de soluções para que possam ser
efetivados.
Conforme abordado na seção 3.2.2, o correto conhecimento da posição do veículo
ao longo da via enseja a implementação de diversos sistemas de automação, como
a abertura automática de portas quando da chegada na estação. A inclusão do
freio de estacionamento nos sistemas comandados pelo CLP, permitiria, também, o
ancoramento automático do veículo e o atendimento ao item 5.1.8 da norma APM.
O controle do acionamento das portas da estação complementaria este passo para
tornar a operação do MagLev-Cobra mais automatizada.
A condução automática do veículo é um objetivo mais ousado, porém exequível.
Neste sentido, a implementação de sistemas de sensoriamento, com vistas a garantir
as redundâncias de segurança previstas na norma [12] seria de grande valor para
a meta de tornar o MagLev-Cobra um APM. Da mesma forma, uma maior inte-
ração entre sistemas de controle e sensoriamento, reunidos nos CLPs, e o inversor
responsável pela alimentação do motor linear seria essencial nesta etapa. Com a
entrada em operação de um sistema de viagens automáticas, a análise estatística
do desempenho facilitaria sua validação, abrindo, desta forma, mais um campo de
estudo.
A implementação prática do sistema de abastecimento de nitrogênio líquido con-
cebido em [3] surge, também, como um dos desaos a serem enfrentados, contri-
buindo para maior segurança da equipe, em atendimento ao item 16.8 da norma
APM.
42
Referências Bibliográcas
[1] LASUP. Laboratório de Aplicações de Supercondutores, disponível em
<http://www.dee.ufrj.br/lasup/index.html>, acessado em 05 ago. 2017.
.
[2] MATTOS, L. S. Análise da propulsão distribuída do veículo MagLev-Cobra e
adequação à norma APM - Automated People Mover. Tese de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2015.
[3] DOS SANTOS COSTA, F. Controle automatizado de abastecimento de nitro-
gênio líquido. Monograa de especialização em Engenharia Mecatrônica,
POLI/UFRJ, Rio de Janeiro, RJ, Brasil, 2014.
[4] SEGOVIA, V. R., THEORIN, A. History of Control: History of PLC and DCS,
University of Lund, jun. 2012.
[5] PETRUZELLA, F. Programmable Logic Controllers. 5 ed. New York, McGraw-
Hill, 2017.
[6] ROQUE, L. A. O. L. Automação de Processos com Linguagem Ladder e Sistemas
Supervisórios. 1 ed. Rio de Janeiro, LTC, 2014.
[7] WEG. Manual do Micro Controlador Lógico Programável série TPW-03. 1 ed.
, 2010.
[8] WEG. TPW-03: Controlador programável - Manual de programação. 1 ed. ,
2010.
[9] CORRSYS-DATRON. Correvit R© L-350 Aqua Non-contact Optical Sensors -
Instruction Manual. Kistler Group, 2011.
[10] DELTA. DOP Series HMI connection manual. Delta Electronics, Inc., 2010.
[11] GEFRAN. Manual of Electrical Installation for Pressure Probes. 3 ed. , Gefran
SPA, 2016.
[12] ASCE. Automated People Mover Standards. Reston, Virginia: American
Society of Civil Engineers, 2013a.
43

Apêndice A
Programa carregado no CLP do
veículo
A seguir, apresenta-se o programa carregado no TPW-03 do MagLev-Cobra, para
realização das tarefas de automação discutidas nos capítulos 2 e 3. Os comentários
nas linhas e nas variáveis servem como orientação, mas, ao longo do trabalho, estão
mais bem expostas as funções de cada linha.
Não estão incluídas alterações propostas para o futuro, como as da gura 3.7.
O programa passou por diversos ajustes, tendo sido a versão abaixo carregada no
CLP em 22/08/17.
44

0000
0011
0017
0023
0029
0037
0045
M8000
Modo RUN
MOV K137 D8120
MOV K1 D8121
M8000
Modo RUN
MOV K1 D8257
M8000
Modo RUN
MOV K3 D8261
M8000
Modo RUN
MOV K1 D8262
M8000
Modo RUN
CMP K420 D8436
Sinal pressão
M100
pressão abaixo do mínimo
Y002
Motor bomba de óleo
CMP K497 D8436
Sinal pressão
M200
pressão abaixo do limite de pressurização
M100
pressão abaixo do mínimo
X006
Freio Solto
( )T0
K10
Esperar 1 segundo antes de pressurizar
M101
pressão igual ao mínimo
M102
pressão acima do mínimo
M200
pressão abaixo do limite de pressurização
* Configuração protocolo Modbus: interface RS485, palavra de 8 bits; 2 stop bits; sem paridade; endereço do escravo: 1
* Número de expansões TPW-03 8AD conectadas: 1
* Entrada A0 configurada para corrente 4-20 mA
* Entrada A4 configurada para tensão 0-10 V
* Teste lógico pressão abaixo do mínimo
* Teste lógico do limite da pressurização
* Pressurização
PAGE 1
PAGE 1
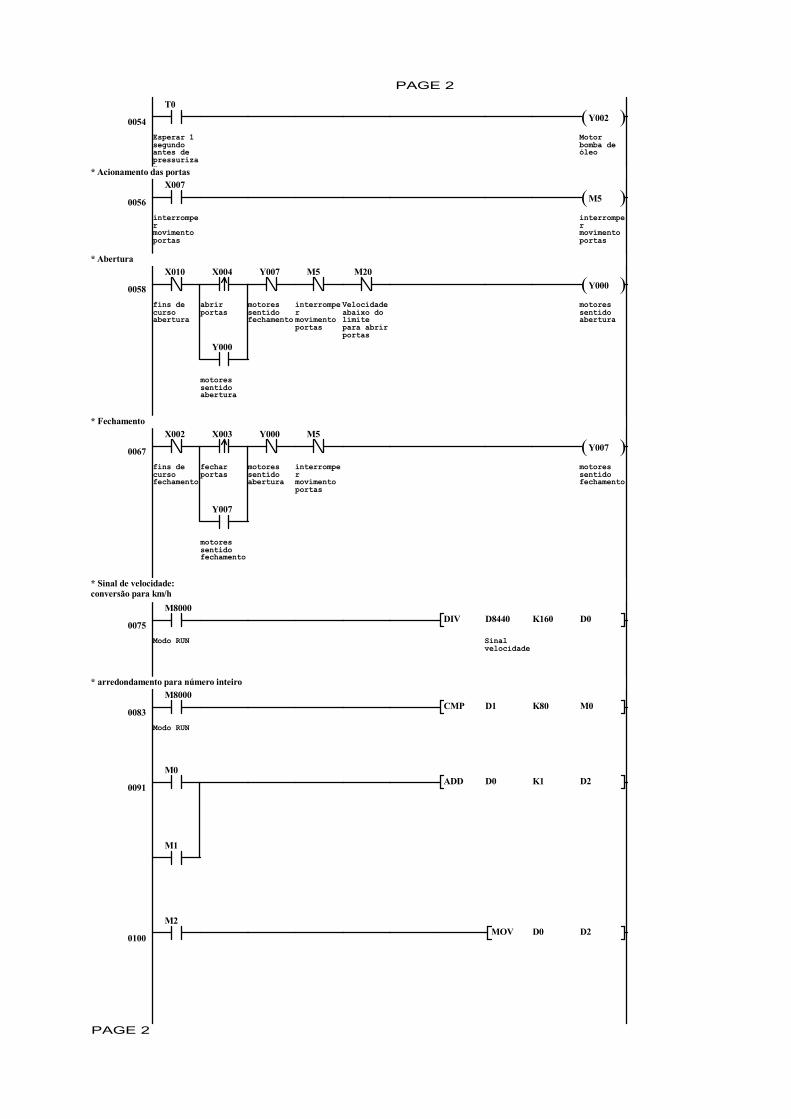
0054
0056
0058
0067
0075
0083
0091
0100
T0
Esperar 1 segundo antes de pressurizar
( )Y002
Motor bomba de óleo
X007
interromper movimento portas
( )M5
interromper movimento portas
X010
fins de curso abertura
X004
abrir portas
Y007
motores sentido fechamento
M5
interromper movimento portas
M20
Velocidadeabaixo do limite para abrirportas
( )Y000
motores sentido abertura
Y000
motores sentido abertura
X002
fins de curso fechamento
X003
fechar portas
Y000
motores sentido abertura
M5
interromper movimento portas
( )Y007
motores sentido fechamento
Y007
motores sentido fechamento
M8000
Modo RUN
DIV D8440
Sinal velocidade
K160 D0
M8000
Modo RUN
CMP D1 K80 M0
M0ADD D0 K1 D2
M1
M2MOV D0 D2
* Acionamento das portas
* Abertura
* Fechamento
* Sinal de velocidade:conversão para km/h
* arredondamento para número inteiro
PAGE 2
PAGE 2
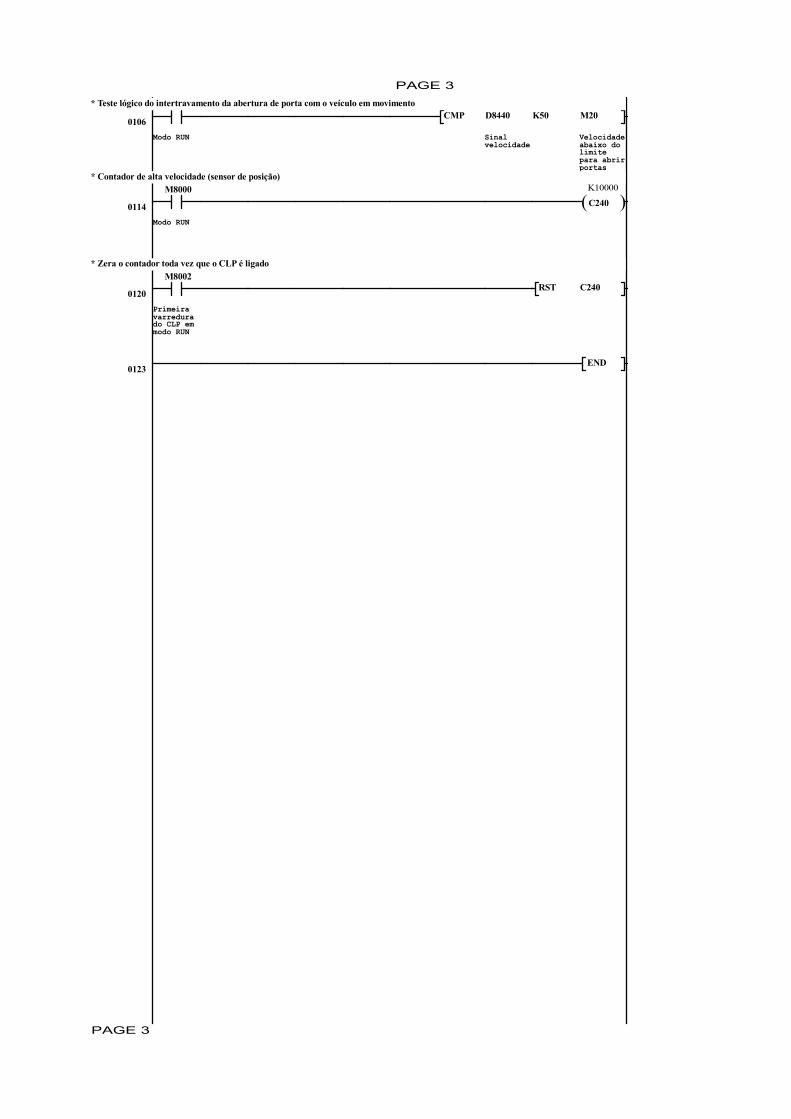
0106
0114
0120
0123
M8000
Modo RUN
CMP D8440
Sinal velocidade
K50 M20
Velocidadeabaixo do limite para abrirportas
M8000
Modo RUN
( )C240
K10000
M8002
Primeira varredura do CLP em modo RUN
RST C240
END
* Teste lógico do intertravamento da abertura de porta com o veículo em movimento
* Contador de alta velocidade (sensor de posição)
* Zera o contador toda vez que o CLP é ligado
PAGE 3
PAGE 3

Apêndice B
Ajustes para funções velocímetro e
odômetro
B.1 Velocímetro
A saída analógica programada no sensor foi de 400mV/km/h. Considerando-se uma
velocidade do MagLev-Cobra de 10km/h, tem-se uma tensão de saída do sensor de
4V , valor adequado para a entrada analógica congurada para 0 a 10V . Dadas
as velocidades com que o veículo trafega na linha de testes, pode-se considerar o
ajuste de tensão por velocidade como, de certa forma, conservador. No entanto, não
haveria nenhum ganho óbvio em se ajustar a saída de tensão mais próxima do limite
de 10V .
Futuramente, numa eventual expansão da linha pela campus da Cidade Uni-
versitária, a programação do sensor deverá sempre considerar a velocidade máxima
atingida pelo veículo em todo o trajeto, e a taxa de mV por km/h nunca deverá
ultrapassar 10V menos uma certa margem de segurança, de forma a não danicar
nem o sensor, nem o CLP.
B.2 Odômetro
A saída digital programada no sensor foi de 50 pulsos/metro.
Com isso, tem-se que a resolução de posição, ou seja, a menor distância percorrida
que o sensor será capaz de identicar será de:
Resol. =1
50= 0, 02m = 2cm (B.1)
Conforme consta do manual do sensor Aqua L-350[9], a resolução poderia ser
tão pequena quanto 1, 5 mm. Deve-se atentar, no entanto, para o fato de que
sempre será contabilizada uma distância igual à resolução mínima, qualquer que
48

seja o sentido em que for percorrida. Uma pequena oscilação do veículo (como, por
exemplo, um leve baque ao ser ancorado mecanicamente no secundário do motor)
levaria à geração de pulsos que, ao invés de se cancelar, se somariam, contribuindo
para uma leitura com erro signicativo após seguidos ciclos de operação.
Outro fator a se considerar é a frequência máxima do sinal de saída. Com o
veículo a 10km/h, tem-se:
v = 10km/h = 2, 778m/s⇒ fout = 50× 2, 778pulsos/s = 138, 89Hz (B.2)
Este valor está bem abaixo da frequência máxima do contador de alta velocidade
escolhido (terminal X005, 5kHz).
49

![Balanço energético e Armazenamento de Energia do Veículo ... · Veículo de Transporte Urbano MagLev-Cobra Sérgio Henrique Ferreira da Conceição ... M Massa do veículo [kg]](https://img.pdfslide.net/doc/110x75/5c0859a009d3f29f288c0fc2/balanco-energetico-e-armazenamento-de-energia-do-veiculo-veiculo-de.jpg)



























![Maglev resumé]](https://img.pdfslide.net/doc/110x75/5571f8a849795991698dd702/maglev-resume.jpg)