Embed Size (px)
Citation preview

Mechanical Analysis and Modeling for Tricopter
Yang Yanga, Li-ling Xiangb, Zhi Liuc, Jin-feng Cuid
Changchun University of Science and Technology, Changchun 130022 China
ae-mail:[email protected], be-mail:[email protected],
ce-mail: [email protected], de-mail: [email protected]
Keywords: Tricopter; Flight attitude; Torque analysis; PID control
Abstract. Distinguished quadrotor , the research of tricopter is still in undeveloped state. This paper
focuses on torque analysis and mathematical modeling for attitude control of the tricopter aircraft.
The simulation of controller shows that the PID method can not achieve the desired states, so the
research of building the mathematical model provides some theoretical foundation for controlling the
tricopter.
Introduction
It's currently more popular to do the research of rotorcraft about miniature unmanned quadrotor all
over the world. So far, the basic theory and experimental research of micro quadrotor have made
great progress, but it is also facing many key technical challenges to maturity and utility. The main
jobs are the overall design optimizing, power and energy, establishment of mathematical model and
flight attitude control.
According to the trends of rotorcraft, the research of tricopter is still undeveloped state in the
world, so this paper puts forward the research scheme of tricopter, provides an effective way for
UAV attitude control and enriches the developments in the field of the UAV.
The Moment Analysis of tricopter UAV
1l′ 2l′
3l′
1f
2f
3f
o′
1l 2l
3l
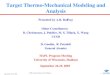
Fig.1 Torsional forces f1, f2, f3 acting perpendicularly to respective shafts
In this system the motor produces two kinds of forces, one is the torsional forces f1, f2 and f3. The
second torque equilibrium condition is to make approximate that is vertical on l1, l2, l3 in the x-y
plane as shown in figure 1. Another forces are the lift forces F1, F2 and F3, which direction is
vertical upward the x-y plane as shown in figure 4. So when the aircraft hovering in the air, it
should meet two torque equilibrium conditions: one makes the aircraft not loop in the x-y plane, and
the other makes it not roll in the y-z plane. Under the first torque equilibrium condition the
corresponding torques of the forces f1 and f2 are vertical upward, and the torque of f3 downward.
Seen by the right hand rule, it is known that the former can make the aircraft anti-clockwise rotate,
and the latter can make it clockwise rotate. In order to make the torque balance, we need to have the
following formula:
1 1 2 2 3 3f l f l f l′ ′ ′⋅ + ⋅ = ⋅� � �
(1)
Which l1’, l2
’, l3
’are the arms of each torsional force to the center of gravity.The vehicle not roll
around y axis, the torque equilibrium as follows:
Applied Mechanics and Materials Vol. 455 (2014) pp 304-309Online available since 2013/Nov/15 at www.scientific.net© (2014) Trans Tech Publications, Switzerlanddoi:10.4028/www.scientific.net/AMM.455.304
All rights reserved. No part of contents of this paper may be reproduced or transmitted in any form or by any means without the written permission of TTP,www.ttp.net. (ID: 130.207.50.37, Georgia Tech Library, Atlanta, USA-16/11/14,13:06:51)

33002211 lFlgmlFlF ⋅=⋅+⋅+⋅����
(2)
Which m0g is the counterweight and l0 is the distance from center of gravity of stuff for
counterweight to fulcrum O.
In addition, the lift forces of motors and the gravity of aircraft should be equal, so equilibrium
conditions as follows:
mggmFFF +=++ 0321 (3)
Which mg is the weight of tricopter.
Let F1, F2 and F3 be the lift forces provided by three motors of tricopter as shown in Figure 4.
Assuming that the x axis positive direction is the forward direction, the forces along x, y, z axis [3-4]
as follows:
++=
321
0
0
FFF
Ftotal (4)
Which the lift force of each motor as follows: 2
1, 2,3
i i iF K W
i
= •=
(5)
Which the constant ki represents the lift coefficient of the ith rotor wing, and wi is the angular
velocity of the ith motor.
According to the figure 2, the moment analysis of the x, y, z axis as follows [5]
:
+=
332211
44321
2211
--
-)(
-
lflflf
LFLFF
LFLF
τ
(6) Which f1, f2 and f3 are the torsional forces of tangential direction mentioned in the Part I of this
paper.
Fig.2 The torque diagram of the tricopter
Coordinate Transformation Matrix Analysis of Tricopter
The rolling unit matrix along x axis direction is as follows:
−=φφφφφ
cossin0
sincos0
001
),(xR
Which φ is the rolling angle along the direction of x axis.
φ
θ
ψ
Fig.3 (a)Rolling angle φ (b)Pitch angle θ (c) Yaw angle ψ
Applied Mechanics and Materials Vol. 455 305

The rolling matrix equation of unit points a, b, c along y axis direction as follows:
−=
θθ
θθθ
cos0sin
010
sin0cos
),( yR
Which θ is the rolling angle along the direction of y axis.
−=
100
0cossin
0sincos
),( ψψψψ
ψzR
Which ψ is the rolling angle along the direction of z axis .
By means of the above matrixes, the coordinate transformation matrix can be got:
),(),(),(),,( φθψψθφ xRyRzRR = (7)
−+−+
++=
θφθφθψθφψφφψθψφψθ
ψθφψφψθφψφθψψθφ
coscoscossinsin
sinsincoscossinsinsinsincoscossincos
cossincossinsincossinsinsincoscos
),,(
s
R
(8)
The Process of Modeling of Tricopter
The forces of tricopter along the direction of x, y, z axes are:
3
1
sin sin cos sin cos
( , , ) ( ) -sin sin cos sin cos
cos cos
x
y i
i
z
F
F F R F
F
ϕ ψ ϕ θ ψϕ θ ψ ϕ ψ ϕ θ ψ
ϕ θ=
+ = • = +
∑总 (9)
According to the third theorem of Newton, the linear equations along the x, y, z directions base
on Ground Coordinate are as follows:
⋅−=⋅−=⋅−=
mzKFz
myKFy
mxKFx
z
y
x
/)(
/)(
/)(
���
���
���
(10) Which K is the coefficient of air resistance.
According to the Euler equation, we can get the equation of angle motion for tricopter:
⋅⋅⋅=⋅⋅+⋅=
⋅⋅=
Izlflflf
IyLFLFLF
IxLFLF
/)--(
/)-(
/)-(
332211
443231
2211
ψθ
φ
��
��
��
(11) From the above formulas, we can reach an equation of modeling the dynamics for tricopter.
( (1)(sin sin cos sin cos )) /
( (1)(sin sin cos cos sin )) /
( (1) cos cos ) /
(2) 1/
(3) 3 /
(4) /
x u m
y u m
z u m g
u L Ix
u L Iy
u l Iz
ψ ϕ ψ θ ϕψ θ ϕ ψ ϕϕ θ
ϕθψ
= + = − = − = =
=
��
��
��
��
��
��
(12)
Which l is the length from center of gravity of the UAV to the arm each propeller, lk is the
moment of the inertia of the corresponding shaft.
Because the output matrix of state equation of tricopter is TzY ),,,( ψθφ�= , the input matrix of
control should be equal to the output matrix,for U = (u(1), u(2), u(3), u(4))T,let the formula of the
controlled object of the input as follows:
306 Mechanical Materials and Manufacturing Engineering III

1 2 3
1 2
1 2 3
1 2 3
(1)
(2)
(3) 2
(4)
u F F F
u F F
u F F F
u f f f
= + + = − = + − = − −
(13)
The Establishment of State Equation and the Simulation of PID Control of Tricoptor
[6-7]
Through the non-linear model of tricopter, we can get the state equation as follows:
X AX BU
Y C X D U
•
•
= +
= +
(14)
TzY ),,,( ψθφ�= TuuuuU ))4(),3(),2(),1((= .
The Coefficient matrixes are as follows:
−
=
0000010000
0000100000
0001000000
0000000000
0000000000
0000000000
0000000000
1000000000
0000000000
0000000000
A
=
0000
0000
0000
0000
/000
0/200
00/10
000/1
000/1
000/1
Izl
IyL
IxL
m
m
m
B
=
0000010000
0000000010
0000000100
0010000000
C
By the following formula, we can obtain the transfer function of tricopter with Matlab as
follows:
DBASICSG +−= −1)()( (15)
According to the design parameters of Reference [3],assuming m = 5.4, l = 1, Ix = Iy = 0.92 and
Iz = 0.78, the transfer function is as follows:
=
2
2
2
/78.0000
0/92.000
00/92.00
000/4.5
)(
s
s
s
s
SG
According to the transfer function of the system of tricopter, we use the method of
Ziegler–Nichols to design PID controller of the control system and the unit step response, unit
impulse response are simulated in the state space with Matlab. The diagram is as shown below[4-7]
:
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Am
plit
ud
e
0 0.5 1 1.5 2 2.5
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
Fig.4 (a)The simulation plot of gain P proportional control for channel Z
(b)PID control step response plot for channel Z at gain k = 1 and the time T = [0, 2.5]
Applied Mechanics and Materials Vol. 455 307

0 2 4 6 8 10 12 14 16 180
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
Fig.5 The step response plot of P(red), PI(green), PID(blue) controls, at T = [0, 18] for channel φ
and θ
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Step Response
Time (sec)
Am
plit
ud
e
Fig.6 PID control step response plot at gain k = 1, the time T = [0, 100] for channel φ and θ
0 10 20 30 40 50 60 70 80 90 1000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Step Response
Time (sec)
Am
plit
ude
Fig.7 PID control step response plot at gain k = 1, the time T = [0, 2.5] for channel Z
Conclusoion
In this paper, at first the mechanical structure of unmanned tricopter is also briefly introduced, and
we analyze the overall physical torque, at the same time theoretically solve the problem of torques
offset. Secondly, we discuss the attitude of the aircraft take-off, pitch, roll, yaw, etc. Finally, through
the above steps we get the kinematics equation of flight attitude control system to describe the
unmanned tricopter, and simulate it with Matlab. The experimental results show that oscillation
time tends to about 80-100 seconds which is a long time in the control system of tricopter using
PID method at gain k = 1, time T = 0-100s. So the design of the control system of tricopter using
PID method can not reach the ideal state and need other method to improve.
308 Mechanical Materials and Manufacturing Engineering III

References
[1] LIU Lili .Research on the Modeling and Control to a Quadrotor Helicopter Simulator [D]. Zhong
Nan University. (in Chinese)
[2] LIU Huanye. Study and design of flight control systems for small scale quadrotor[D] .Shanghai
Jiaotong University. (in Chinese)
[3] WANG Shugang. Research of Quadrotor Control [D]. Harbin Institute of Technology. (in
Chinese)
[4] Sergio Salazar-Cruz, Real-Time Control of a Small-Scale Helicopter Having Three Rotors
Compiègne, France{ssalazar, fkendoul, rlozano, ifantoni}[M]
[5] S. Salazar-Cruz and R. Lozano. Stabilization and nonlinear control fora novel tri-rotor
mini-aircraft, in proceedings of the IEEE ICRA’05, Barcelone, Spain, April 2005[C].
[6] A.Tayebi, S.McGilvray, “Attitude stabilization of a four-rotor aerial robot,” IEEE Conference on
Decision and Control, 2004[C]
[7] N.Guenard, T.Hamel, V.Moreau, Dynamic modeling and intuitive control strategy for an
“X4-flyer, International Conference on Control and Automation, 2005[C].
[8] S. Salazar-cruz, F. Kendoul, R. Lozano, I. Fantoni, “Real-Time Stabilization of a Small
Three-Rotor Aircraft,” Aerospace and Electronic Systems Vol.44, No.2, 2008[C].
[9] J.Escareno, A.Sanchez, O.Garcia, R.Lozano, “Triple Tilting Rotor mini-UAV: Modeling and
Embedded Control of the Attitude,” American Control Conference, 2008[C].
Applied Mechanics and Materials Vol. 455 309

Mechanical Materials and Manufacturing Engineering III 10.4028/www.scientific.net/AMM.455 Mechanical Analysis and Modeling for Tricopter 10.4028/www.scientific.net/AMM.455.304