Embed Size (px)
Citation preview

Classical mechanics 1
This document is based on Chapter 1 of theFoundations of Physics for Chemists,by G. A. D. Ritchie and D. S. Sivia, published by the Oxford University Press(2000) in theOxford Chemistry Primers series (vol. 93).
1.1 Introduction
Newton (1642–1727) became Lucasian Pro-fessor at Cambridge at the age of 27, andstayed at the university for 30 years beforebecoming Master of the Royal Mint. Whilehis contributions to Mathematics and Physicswere far-reaching, his greatest interests werealchemy and the occult.
The Oxford English Dictionary describes Physics as‘the scientific study of theproperties and interactions of matter and energy’. An important aspect of thisstudy is a desire to understand a wide range of disparate phenomena in termsof a few basic rules or‘laws of nature’. One of the first people to achieve amajor success in this endeavour was Sir Isaac Newton, who wasable to explainwhy apples fell to the ground and how planets orbited the sun within a singletheory of the universal law of gravitation. We begin our discussion of Physics,therefore, with Newton’s work on forces and motion; this topics is usuallycalled classical or Newtonian mechanics.
1.2 Newton’s laws of motion
1.2.1 The first law
A body remains at rest, or moves at a constant speed in a straight line,unless acted upon by a force.The first law provides a definition of force: thatwhich causes an object to change its speed or direction of motion. In lay terms,a push or a pull.
It’s not too difficult to imagine that a force exerted along the line of motionwill result in a change of speed, whereas a corresponding nudge in a perpendic-ular direction will alter the course of travel. This dependence on the orientationof the force tells us that it is avectorquantity, being specified by both a mag-nitude and a direction; by contrast, mass is ascalarquantity, having only theformer attribute of ‘size’ (or how heavy or light something is). The statementof the first law can be made more succinct by rephrasing it in terms of auni-form velocity, where velocity is a vector pertaining to speed (a scalar) inagiven direction. Explicitly, 10 metres per second (m/s or m s−1) is a speed but10 m s−1 due east is a velocity.
We will not go into a detailed discussion of vectors, or any other topic inapplied mathematics, in this text (referring the reader instead to volumes 77and 82, by Sivia and Rawlings, in the Oxford Chemistry Primers series), butwill try to give a brief reminder at opportune times.

2 Classical mechanics
Magnitudes, directions and basic vector algebra
A vector,F say, is represented graphically by an arrow where the lengthof the linecorresponds to its magnitude,|F|, and the pointed-end indicates the direction. Alge-braically, vector quantities are often differentiated from scalar ones through the useof a bold font. If the vector lies in thex–y plane (so that it can easily be drawn ona piece of paper), then it can be decomposed, orresolved, into two components thatare perpendicular to each other. Using thex (or horizontal) andy (or vertical) direc-tions as our reference, we can expressF as(Fx , Fy) whereFx andFy are scalars;specifically, ifF points at an angleθ (anti-clockwise) with respect to thex-axis, thenelementary trigonometry shows that
Fx = |F| cos θ and Fy = |F| sin θ .
Using the identitysin2θ + cos2θ ≡ 1, or Pythagoras’ theorem, it follows that thesquare of the magnitude ofF is given by
|F|2 = F2
x + F2
y .
Two vectors are said to be equal if they have the same magnitude and direction; thisis equivalent to requiring each of the corresponding components to be equal.
Vectors are added together graphically by sequentially placing the flat-end of onearrow representation at the location of another’s apex, so that the sum is the resultantdisplacement from start to finish; algebraically, this amounts to separately adding-up the various components of the contributing vectors. Subtraction is just a specialcase of addition, with the negative vector having the same magnitude but oppositedirection as its positive counterpart. Algebraically, then,
C = A ±B ⇒ Cx = Ax ± Bx , Cy = Ay ± By , . . .
The multiplication and division of a vector by a scalar is straightforward, resulting inonly a change of magnitude but not direction (to within a signreversal, if the scalaris negative). In terms of components,
C = µA ⇒ Cx = µAx , Cy = µAy , . . .
The product of two vector is more involved, and we defer its discussion to appropriatepoints in this chapter. Division by a vector is not defined, however, and this operationmust never appear in our calculations.
A=B ⇔ Ax =Bx , Ay =By , . . .
Newton’s first law of motion can be paraphrased by saying that‘a force isrequired to change an object’s velocity’. A stationary body is a special casewhen the magnitude of the velocity, or speed, happens to be zero. Indeed,its study forms a separate branch of mechanics calledstatics(as opposed todynamics); it plays a central role in working out the strength of the materialsrequired to prevent a bridge from collapsing, or the frictional roughness of asurfaced required to stop a ladder from slipping, and so on. According to thefirst law, of course, the net force on an object must be zero if it is to remainstationary; this forms the basis of the topic of statics.

1.2 Newton’s laws of motion3
1.2.2 The second law
The force acting on a body is directly proportional to its rate of changeof momentum. The second law is a quantitative statement about the strength,and influence, of a force. To appreciate it, however, we must first understandwhat is meant bymomentum.
Exercise 1.1Given that the quantum mechan-ical wavelength,λ , associated with a parti-cle having a momentum of magnitudep isλ = h/p , whereh is Planck’s constant, whatis the speed of a neutron used in diffractionexperiments to study structure on an atomiclength scale (i.e.λ ≈ 0.1 nm) ?
In everyday parlance, we sometimes talk about a movement developing amomentum of its own; the implication being that it is a trend that is becomingincreasingly difficult to argue with or stop. A simple physical picture thatconjures-up the same sense is that of a car, or a truck, careering down a hilldue to brake failure. It’s not hard to imagine that the effortrequired to controlthe run-away vehicle will be greater the faster it’s going orthe heavier it is;consequently, the definition of the momentum of an object as the product ofits mass and velocity does not seem unreasonable. Like the velocity v, and incontrast to the massm, the momentump is also a vector:
p = mv , (1.1)
so that the direction of the (linear) momentum is along the (instantaneous) lineof motion.
Returning to Newton’s second law of motion, we can now state this mathe-matically as
F ∝ d
dt(mv) , (1.2)
d
dt(mv) = m
dv
dt+ v
dm
dt
whereF is the applied force andd/d t is the differential operator meaning‘the rate of change, with respect to time (t), of’ . If the mass of the object re-mains constant during the motion, so thatdm/dt =0, then eqn (1.2) simplifiesslightly to the more familiar form
F = ma , (1.3)
wherea =
dv
dt, (1.4) ax =
dvx
dt, ay =
dvy
dt, . . .
the rate of change of velocity with time, is theacceleration. We should notethat the proportionality of eqn (1.2) has been replaced by anequality in goingto eqn (1.3) by assuming that the force, mass and velocity aregiven in suit-able (SI) units: newtons (N), kilograms (kg) and metres per second (m s−1)respectively.
Exercise 1.2 Is an electron moving in a cir-cular orbit at a constant speed accelerating?
Early on in our school life, we usually learn Newton’s secondlaw of motionas‘force = mass×acceleration’. The discussion above shows that while this isgenerally true, we must remember that force and acceleration are vectors. Assuch, eqn (1.3) yields separate relationships for each of its components:
Fx = mdvx
dt, Fy = m
dvy
dt, . . . (1.5)
We should also bear in mind the proviso of an invariant mass, and add a termv dm/dt to the right-hand side of eqn (1.3) ifdm/dt 6= 0 (as for the case ofa rocket where fuel burning is significant).

4 Classical mechanics
Newton’s second law of motion tells us that, for the same applied force, themagnitude of the acceleration experienced by a body is inversely proportionalto its mass. That’s why motorcycles with modestly powerful engines can easilyovertake cars, or why racing cars are made from the lightest (but structurallystrong) materials available. Incidentally, the change in the momentum of anobject is called theimpulseand, by integration of eqn (1.2), is readily shownto be equal to
∫
Fdt :
t2∫
t1
Fdt = [mv ]t2t1 = m(v2−v1) , (1.6)v1 = v(t1)
where we have assumed that the mass does not change in the writing the termon the far right-hand side. If the force itself happens to be constant, then eqn(1.6) reduces to‘force× time = mass×change-of-velocity’. To return a tennisball so that it approaches our opponent at very high speed, for example, weneed either a brief but powerful contact with the racket or a less vigorous strokethat maintains contact between the racket-head and ball fora longer time.
1.2.3 The third law
To every action there is an equal and opposite reaction.The third law is astatement about the nature of forces, in that they mediate a mutual interactionbetween two objects.
If the earth is held in its orbit around the sun by the latter’sgravitationalattraction pulling it towards the centre of the solar system, then the sun experi-ences a (gravitational) pull of equal magnitude towards theearth; the influenceof this force on the sun is much smaller, of course, because ofthe enormousdifference in their masses (a factor of more than one hundredthousand). Sim-ilarly, the forward propulsion of a bullet fired from a rifle isaccompanied by abackwards recoil of the gun.
1.3 Newton’s second law in action
To see how Newton’s laws of motion can be to used to understandthe dynam-ical behaviour of the world around us in a quantitative manner, let us considera couple of examples. The first is quaint, but very pedagogical, and involvesthe trajectory of a projectile. The second entails oscillatory behaviour, and isof greater scientific relevance.
1.3.1 The trajectory of a cannon ball
Suppose that a shell is fired out to sea from the battlements ofa coastal fort thatare at a heightH metres above sea-level. Ifu is the speed of the projectile onleaving the gun-barrel, which is inclined at an angleθ to the horizontal, howfar will it go before it hits the water?
To deal with this problem we first need to set up a coordinate system, or ref-erence framework, within which to do the calculation. Following convention,

1.3 Newton’s second law in action5
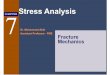
Fig. 1.1 Thex-y coordinate framework for the trajectory of a shell fired froma coastal fort.
we will let x andy denote the (rightwards) horizontal and (upwards) verticaldisplacements respectively; for convenience, the origin(0 , 0) is best chosen tobe at the coastal-base of the fort. The situation is illustrated in Fig. 1.1.
Exercise 1.3 If the neutron in Exercise 1.1enters a long, straight, horizontal and evacu-ated guide tube of radius1 cm, how far alongthe guide will it have moved before it firstmakes contact with the bottom wall assum-ing an alignment of the initial velocity withthe central axis?
Ignoring minor factors such as air resistance, the only force acting on theprojectile during its flight is gravity: a downwards force ofmagnitudemg,whereg = 9.8 N kg−1 is the strength of earth’s gravitational pull close to thesurface. As such, thex andy components ofF are
Fx = 0 and Fy = −mg .
Their substitution into eqn (1.5), and a division bym, leads to two first-orderdifferential equation for the velocity of the shell:
dvx
dt= 0 and
dvy
dt= −g . (1.7)
These are said to be theequations of motionfor the projectile, and follow fromthe application of Newton’s second law of motion in the horizontal and verticaldirections respectively. They represent the case where there is no accelerationin the horizontal direction and a constant acceleration vertically. An integra-tion of eqn (1.7), with respect tot, yields the time-dependence of thex andycomponents of the velocityv:
vx = α and vy = −g t + β ,
whereα andβ are constants. If we lett=0 be the starting-time of the trajec-tory, whenvx = u cos θ and vy = u sin θ, then
vx = u cos θ and vy = u sin θ − g t . (1.8)
These expressions can readily be turned into a pair of first-order differentialequation for the location of the projectile,

6 Classical mechanics
dx
dt= u cos θ and
dy
dt= u sin θ − g t , (1.9)
since velocity is the rate of change of position,r=(x, y), with time:
v =dr
dt. (1.10)vx =
dx
dt, vy =
dy
dt, . . .
An integration of eqn (1.9), with respect tot, yields
x = (u cos θ) t + α′ and y = (u sin θ) t − 12g t2 + β′ ,
whereα′ andβ′ are constants. Asx = 0 andy = H whent = 0 , α′ = 0 andβ′=H . Hence,
x = (u cos θ)t and y = H + (u sin θ) t − 12g t2 (1.11)
defines the trajectory of the shell as a function of time (after launch and beforeit hits the sea). The substitution oft = x/(u cos θ) into the expression foryreveals the path to be parabolic.
Since sea-level corresponds toy=0 in our coordinate system, the time takenfor the projectile to reach the surface of the water,T , is given by the solutionto the quadratic equation
H + (u sin θ)T − 12gT 2 = 0 .
Although this is formally satisfied by two values ofT , only the one with thepositive square-root makes physical sense (ast>0):
T =u sin θ +
√
u2 sin2θ + 2gH
g.
The range of the shell,R, is then equal to thex-coordinate in eqn (1.11) whent=T . Namely,
R =u cos θ
g
[
u sin θ +
√
u2 sin2θ + 2gH
]
. (1.12)
If required, the angle of inclination for the maximum range can be calculatedby solving the equationdR/dθ = 0 . While the differentiation is straightfor-ward, if somewhat messy, finding the root(s) of the resultantnon-linear equa-tion is not easy in general. The special case ofH =0 can be done analytically,however, when eqn (1.12) simplifies to
R =u2 sin2θ
g.sin2θ = 2 sinθ cosθ
This yields a maximum range ofu2/g when θ=45◦.

1.3 Newton’s second law in action7
1.3.2 Simple harmonic motion
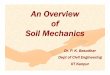
As a second example of Newton’s second law in action, let’s consider the be-haviour of an atom that is loosely bound to a substrate. The situation can bemodeled as a particle of massm (kg) that is attached to a solid planar surfaceby a (weak) spring of stiffnessk (N m−1). While several types of motion arepossible, for simplicity, we will only consider small perturbations of the atom,from its equilibriumposition, along the line of the bond; this is illustrated inFig. 1.2(a). For an ideal spring, the restoring force,F , is proportional to itsextension or compression,x, so that
F = − kx , (1.13)
wherek is called thespring constant; this is known asHooke’s law. Usingthe fact that the acceleration of the mass,a, can be expressed as the secondderivative of its displacement with respect to time,
a =dv
dt=
d
dt
(
dx
dt
)
=d2x
dt2,
Newton’s second law of motion for this one-dimensional problem,F = ma ,leads to the differential equation
− kx = md2x
dt2. (1.14)
This equation of motion has the general solution
x = A sin(ω t + φ) , (1.15) d2x
dt2= −ω
2x
which can be verified by substitution in eqn (1.14), where theangularfre-quencyof the sinusoidal oscillation,ω, is given by
ω =
√
k
m(1.16)
Fig. 1.2 A simple harmonic example: (a) the restoring force,−kx, given a small displacement,x, from the equilibrium position; (b) the resultant sinusoidal oscillation, with frequencyω.

8 Classical mechanics
and has (SI) units ofradiansper second. The determination of the (arbitrary)constantsA andφ , known as theamplitudeandphaserespectively, requiresfurther information, or boundary conditions. A spectroscopic measurement ofω tells us about the stiffness of the related atomic bond.
The frequency of an oscillatory system is often given in terms of cyclespersecond, orHertz(Hz), rather than rad s−1. Denoting the latter byf , it is easilyrelated toω through
ω = 2πf , (1.17)
since there are2π radians in one complete turn (or 360◦).
1.4 Conservation of momentum
In Section 1.2.1, we noted that an object moved with a uniformvelocity if therewas no force acting on it. More formally, a time-integral of the second law ofmotion in eqn (1.2) shows that
p = mv = constant
if F=0. While this is not particularly useful for an isolated body,it becomesan important property once we realise that the total momentum of a collectionof interacting particles is always conserved if there is no net external forceacting on them.
To see this, consider a system ofN particles; we will label each with asubscript, so that theith one has momentumpi. If Fi denotes the externalforce acting on theith particle, andFij is the force exerted by thejth on i,then Newton’s second law tells us that theith component of the system obeysthe equation of motion
Fi +∑
j 6=i
Fij =dpi
dt,
X
j 6=1
F1j = F12 +F13 + · · · +F1N
where theΣ-term constitutes the sum of all the internal interactions.Addingup theN such equation, fori =1, 2, 3, . . . , N , we obtain
N∑
i=1
Fi +N∑
i=1
∑
j 6=i
Fij =N∑
i=1
dpi
dt.
NX
i=1
X
j 6=i
Fij =X
j 6=1
F1j + · · · +X
j 6=N
FNj
According to Newton’s third law,Fij =−Fji. All the terms cancel out in pairsin the double-summation, therefore, and the equation of motion reduces to
N∑
i=1
Fi =d
dt
(
N∑
i=1
pi
)
, (1.18)
where we have used the linearity of the differential operator, d/dt, to write thesum of the derivatives as the derivative of the sum on the right-hand side. Ifthe system is isolated, so that
∑
Fi =0, then an integration of eqn (1.18) withrespect to time yields

1.5 Work done, energy and power9
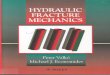
Fig. 1.3 (a) The kinematics of a general two-body collision, and (b) asimple special case.
N∑
i=1
mivi = constant , (1.19) pi = mivi
wheremi andvi are the mass and velocity of theith particle. In other words,the total (linear) momentum is conserved.
As an explicit illustration of eqn (1.19), suppose that two particles, withmassesm1 andm2, collide with incoming velocities ofu1 andu2 and separatewith outgoing velocitiesv1 andv2; the situation is sketched in Fig.1.3(a). Thetotal initial momentum ism1u1 + m2 u2 , whereas the outgoing combinationis m1v1+m2v2. According to the conservation of momentum, therefore, oneconstraint on their motion is given by
m1u1 + m2 u2 = m1v1 + m2v2 . (1.20)
This vector equation is shorthand for several simultaneousrelationships, ofcourse, since it is satisfied by every spatial component of the velocities (alongthe x, y , . . . directions). A particularly simple case of the above scenariooccurs when particle 2 is initially at rest (u2 =0) and they both stick togetheron impact, or coalesce, so thatv1 =v2 =v, as illustrated in Fig. 1.3(b). Then,eqn (1.20) simplifies to
m1u1 = (m1+ m2)v .
That is to say, the initial and final velocities are in the samedirection (i.e. astraight-line collision), but the onward-going speed is reduced by a factor ofm1/(m1+m2).
1.5 Work done, energy and power
1.5.1 Work done
Lifting a heavy object is a difficult task, and entails a greatdeal of effort; we’dbe inclined to say that it was hard work! In science, the term ‘work’ has avery specific meaning: it is a measure of the distance moved inopposition to a

10 Classical mechanics
force. If the forceF had a constant magnitude, and acted in a fixed direction,and we moved a distanceL in a straight line directly against it, then the workdone by us is defined to be|F|L newton metres (N m) orjoules(J); in otherwords, ‘force× distance’. Conversely, if we were displaced byL along thedirection ofF, then |F|L would be the work done by the force.
When we are making the effort, there is no particular reason why F and thedisplacement vectorL should be parallel (or antiparallel) to each other. If theirorientations differ by an angleθ, but are otherwise acting in a uniform manner,then the work done by us,W, is given by
W = − |F| |L| cos θ . (1.21)
If W is negative, then|W | is the work that is done on us by the force. Thepresence of the cosine in eqn (1.21) can be understood in one of two equiva-lent ways: (i) the component of the displacement in the direction of the forceis |L| cos θ, by elementary trigonometry; and, similarly, (ii)|F| cos θ is thecomponent of the force along the displacement-path.
In general, neither the displacement nor the direction of the force will liealong a fixed direction; indeed, the magnitude ofF may also vary with posi-tion. The work done can then be calculated by dividing up the path into manysmall straight line segments, with displacementsδL, over which the force islocally uniform, and adding up all the tiny contributions
δW ≈ − |F| |δL| cos θ . (1.22)
Taking the infinitesimal limit in the summation, and using the succinct notationof ascalar(or dot) product,
W = lim|δL|→0
∑
path
δW = −∫
path
F•dr (1.23)
where we have useddr instead ofdL on the right-hand side for consistencywith the conventional notationF=F(r).
F•dr = |F| |dr| cos θ
The scalar, or dot, product of two vectors
The simplest way in which two vectors,A andB, can be multiplied together is calleda ‘scalar’ or ‘dot’ product. The former indicates that the result of such a multiplicationis a scalar quantity, whereas the latter describes the symbol used to denote this typeof product. It is defined geometrically as theproduct of the lengths of the two vectorstimes the cosine of the angle between them,
A•B = |A| |B| cos θ , (1.24)
and is calculated algebraically through thesum of the products of corresponding com-ponents:
A•B = AxBx + AyBy + · · · , (1.25)
whereA=(Ax , Ay , . . . ) andB =(Bx , By , . . . ).

1.5 Work done, energy and power11
1.5.2 Potential energy
Potential energyis literally the potential of an object, or a system, to do workby virtue of its position or state of being. Water at the top ofa high waterfallhas a lot of potential energy, for example, since it is capable of driving a turbineblade to generate electricity. Similarly, a spring stores potential energy whenit is stretched or compressed which becomes available (for catapulting things)when the tension is released.
To get a quantitative feel for the concept, let us calculate the potential energystored in an ideal spring. As noted in Section 1.3, this can beused to modelthe behaviour of a chemical bond when subjected to a collinear perturbation.With reference to Fig. 1.2(a) and eqn (1.22), the small amount of work done,δW, in increasing the extension or compression of a spring of stiffnessk fromx to x + δx is given by
δW ≈ k x δx .
Summing up these tiny contributions in the limit ofδx→ 0, the total amountof work needed to change the length of the spring from its relaxed state by adistanceX is evaluated through the integral
W =
x=X∫
x=0
k x dx =
[
kx2
2
]X
0
= 12kX2 .
Taking this to be the amount of energy stored in the distortedspring, the po-tential energyV at displacementx is:
V = 12kx2 . (1.26)
It varies quadratically, whereas the the restoring force islinear.As a second example, consider two isolated ions with chargesq and Q
coulombs(C) that are separated by a distancer. According to Coulomb’s law,there is a mutual repulsion between them which is proportional to the productof the charges and inversely proportional to the square of their separation:
F =q Q
4πǫo r2, (1.27)
»
−1
r
–∞
R
=1
R
whereǫo is a constant (8.854×10−12 C2 m−2 N−1) called thepermittivityoffree space. A negative value ofF indicates that the force is actually attractive,and will be the case whenq andQ have opposite signs. The inverse-square falloff in eqn (1.27) is illustrated in Fig. 1.4(a). Taking the potential energy of thissystem to be zero when the two charges are infinitely far apart, V is equal tothe work done in bringing them together fromr=∞ to r=R. Following eqns(1.23) and (1.27), that is
V = −r=R∫
r=∞
F dr =q Q
4πǫo
∞∫
R
dr
r2.

12 Classical mechanics
Fig. 1.4 The variation of the (mutually repulsive) force,F , and potential energy,V , with separa-tion r between two isolated (point-like) ions with chargesq andQ.
Evaluating the integral, the potential energy at a separation ofr is seen to be
V =q Q
4πǫo r, (1.28)
and is illustrated in Fig. 1.4(b). The potential energy increases with distancefor charges of opposite sign, since work has to be done to pullthem apart, anddecreases with separation for charges of the same sign, as they naturally repeleach other. Incidentally, ananionwith a charge equivalent to one electron hasq = −1.602×10−19 C.
1.5.3 Kinetic energy
Kinetic energy(KE) is the energy associated with motion. Although we mightguess that it is a function of the mass and speed of an object,KE = f (m,v),what is the exact relationship?
The formula for the kinetic energy can be derived by calculating the workdone by a forceF when a massm is accelerated from rest to speedvo. Sincethe force need not be uniform, we will consider infinitesimally small incre-ments and add up their contributions as in eqn (1.23):
KE =
v=vo∫
v=0
F•dr . (1.29)
Over a short period of time,dt , the force and the resultant displacement,dr,can be related to the instantaneous velocity,v, through
F = mdv
dtand dr = v dt .
This enables the integrand in eqn (1.29) to be written as
F•dr = mv•dv ,

1.5 Work done, energy and power13
where we have implicitly used thechain ruleof differentiation and the com-mutative property of a dot product. A direct connection between F •dr andthe speed can now be made by noting that
dv2 = d(v•v) = 2v•dv ,
A•B = B•A
v = |v| =√
v•v
which follows from theproduct ruleof differentiation. In other words, theintegral of eqn (1.29) simplifies to
KE =m
2
v=vo∫
v=0
dv2 =m
2
[
v2]vo
0= 1
2mv2
o .
Hence, the kinetic energy (in joules, J) of a massm (kg) moving at a speedv(m s−1) is found to be
KE = 12mv2 =
p2
2m, (1.30)
wherep = mv is the modulus of the momentum in eqn (1.1).
1.5.4 Conservation of energy
One of the most useful devices in Physics for carrying out quantitative calcu-lations are ‘conservation laws’. We met an example of this inSection 1.4, theconservation of linear momentum, which was derived from Newton’s secondand third laws of motion. Perhaps the most fundamental of allsuch rules, or as-sumptions based on experience, is that of the conservation of energy:Energymay be transformed from one form to another, but it cannot be created ordestroyed.In other words, the total energy of a system is conserved.
As a specific example, let us consider the simple harmonic case of Section1.3. Substituting for the displacementx from eqn (1.15) into the formula forthe corresponding potential energy (PE) in eqn (1.26),
PE = 12kA2 sin2(ω t + φ) . (1.31)
Likewise, the substitution of the time-derivative ofx in eqn (1.15) forv in eqn(1.30) leads to
KE = 12m
(
dx
dt
)2
= 12m ω2A2 cos2(ω t + φ) ,
which can be simplified to
KE = 12kA2 cos2(ω t + φ) . (1.32)
with eqn (1.16). Although the potential and kinetic energies vary sinusoidallywith time, their sum remains constant:
Total energy = PE + KE = 12kA2 , (1.33)
where we have implicitly used the identitysin2θ + cos2θ ≡ 1. The temporalvariation of eqns (1.31)–(1.33) is illustrated in Fig.1.5,and shows that any loss

14 Classical mechanics
Fig. 1.5 The temporal variation of the kinetic, potential and total energy of the simple harmonicsystem of Fig. 1.2, as per eqns (1.31)–(1.33).
in potential energy is matched by an equivalent gain in kinetic energy andviceversa.
While the total energy of an isolated system is always conserved, there isoften special interest in its kinetic energy. This is particularly true in collisionphenomena, where the termelasticis used to denote the conservation of KE. Ifthe interaction of Fig.1.3(a) was elastic, for example, then the velocities wouldsatisfy the scalar constraint
m1|u1|2+ m2 |u2|2 = m1|v1|2+ m2 |v2|2 (1.34)
Exercise 1.4 If two H+ ions traveling in op-posite directions at 300 m s−1 have a head-oncollision, how close will they get before theystart to move apart? How would the situationdiffer if one of the ions was initially at rest?
in addition to the vector condition of eqn (1.20). The collision illustrated inFig. 1.3(b) isinelasticsince
m1|u1|2 > (m1+ m2) |v|2
from the conservation of momentum. The shortfall in kineticenergy cannot berecovered in this case as it becomes dispersed asinternal energy(heat) in theputty-like encounter.
The universal nature of the law of conservation of energy canbe seen fromthe fact that it appears in several different guises in science. For example, thefirst law of thermodynamics, and theBorn-HaberandHesscycles in Chem-istry, are nothing more than a restatement of this principle.
1.5.5 Power
Although the concept of energy tells us how much work is (or can be) done, itgives no indication of how quickly the relevant task is performed.This temporalaspect is encapsulated in the termpower, which is defined to be the‘rate ofdoing work’. In calculus notation, the powerP is related to the work doneWthrough
P (t) =dW
dtand W =
t2∫
t1
P (t) dt . (1.35)
The average power is simply the total work done divided by theduration ofthe exercise. The standard unit for power is watts (W), whichis equivalent tojoules per second (J s−1). A measure more familiar from car specifications is‘horsepower’, where1 hp = 746 W. We note that the most common everyday

1.6 Fields, potentials and stability15
unit of energy is acalorie (Cal), frequently misused for kCal (or 1000 Cal),and is approximately equal to4.2 J; one calorie is formally defined to be theenergy required to raise the temperature of1 cm3 of water by1◦C.
1.6 Fields, potentials and stability
In eqn (1.27), we encountered Coulomb’s law. It is an exampleof an ‘action-at-a-distance’force, since it operates without direct contact between thetwocharges. In such contexts, it can be useful to introduce the concept of a ‘fieldof the force’. The idea is probably familiar, as the pattern made by iron-fillingsscattered on a piece of paper above a bar magnet gives a visualindication ofthe lines of the magnetic field. A small object, which is susceptible to effectsof magnetism, will move along the field lines when placed in the vicinity ofthe bar magnet.
There is, of course, a close link between a field and a force; itis essentiallyone of normalisation, or scaling. An electric field is definedto be the force perunit charge (N C−1), for example, and a gravitational field is the force per unitmass (N kg−1). Thus an object with chargeQ will experience a force
Felec = QE (1.36)
when placed in an electric fieldE, and a massm will experience of a force
Fgrav = mg (1.37)
when in a gravitational fieldg.Just as it is sometimes useful to think in terms of a field rather than a force,
so too is there an analogous quantity for potential energy; namely thepotential,which corresponds to the PE per unit charge (J C−1) or per unit mass (J kg−1)in the electrostatic and gravitational cases respectively. There is an intimateconnection between fields and potentials, since force and work done are linkedthrough the integral relationship of eqn (1.23). A consideration of eqns (1.13)and (1.26) provides explicit verification of a differentialconnection betweenthe relevant forceF and potential energyV ,
F = − dV
dx,
for an ideal spring. This is confirmed by the electrostatic example of eqns(1.27) and (1.28), from which it can be seen that
F = − dV
dr.
A more detailed examination of the electrostatic case leadsto the general vec-torial result
E = −∇φ , (1.38)
whereφ is the scalar potential and∇ is a ‘vector differential operator’. Theimportant thing to note about∇φ is that it is a vector: its direction indicates

16 Classical mechanics
Fig. 1.6 The equipotentials,φ = constant, and electric field,E , shown in blue and red respec-tively, for three elementary cases: (a) a positive charge, (b) a negative charge and (c) parallelplates. The arrows indicate the direction in which a positive charge in the vicinity would move.
the direction in which the potential increases most rapidly, and its magnitudespecifies how quickly it does so. The minus sign in eqn (1.38) tells us thatobjects move naturally from locations of high potential to the nearest lowerones. Some simple examples of electric fields and‘equipotentials’(lines, orsurfaces, along whichφ = constant) are shown in Fig. 1.6, and illustrate thatthe two are mutually perpendicular.
There is a proviso to the discussion above, in that only‘conservative’forceshave associated potentials. These are ones in which the workdone in movingan object depends only on the start and end points, and not on the path takenbetween them. As such, potentials are a physical analogue of‘state functions’in Chemistry.
The final topic we need to discuss in this section is that of‘stability’ . Sup-pose that a particle exists in a certain potentialφ(r), where we have made theproblem one-dimensional for simplicity. Are there any locations, or values ofr, where it can remain at rest? According to Newton’s first law of motion, thiscan only happen if the net force is zero. Following eqns (1.36) and (1.38), forexample, we needdφ/dr = 0 , or the stationary points of the potential. If thelatter is a minimum, so thatd2φ/dr
2 > 0 , then it is a point ofstable equilib-rium: the particle moves back to the stationary value ofr if it is given a smallnudge. Conversely, any perturbation will be amplified ifd2φ/dr
2 <0 becausesuch a maximum is a point ofunstable equilibrium. The situation is illustratedgraphically in Fig. 1.7(a).
The interaction between two neutral atoms is often modelledin terms ofa Lennard–Jonespotential; its variation, as a function of their separationr,is plotted in Fig. 1.7(b). The point of stable equilibrium gives the naturalbond length: if the atoms moves closer than this, the net force is repulsive;if separated farther, it’s attractive. For small perturbations from equilibrium,φ(r) can be approximated by a quadratic Taylors series expansionabout theminimum; this is indicated in Fig. 1.7(b) and, to within an additive constant, isequivalent to the simple harmonic potential of eqn (1.26).
1.7 Rotational motion
Perhaps the simplest and most common form of non straight line motion is onethat follows a circular curve. The orbits of the planets around the sun, or the

1.7 Rotational motion 17
Fig. 1.7 (a) A one-dimensional potential energy surface,φ(r), with points of stable and unstableequilibrium and a region of neutral stability. (b) The Lennard–Jones potential, which is often usedto model the interaction of two neutral atoms as a function oftheir separationr; the dotted red lineis the harmonic approximation for small perturbations fromequilibrium.
moon around the earth, for example, are very nearly circular(more generallyelliptical); and the Bohr model of the atom had the electronsmoving around thenucleus along circular paths. In this section, we will consider such rotational,or angular, motion.
1.7.1 Centripetal forces
According to Newton’s first law of motion, any deviation fromtravel in astraight line is indicative of a net force. In particular, circular motion requiresa centrally acting, orcentripetal, force that continually pulls the orbiting bodytowards a focal, or pivotal, point. In an astronomical setting, this is providedby gravity; and in the Bohr model, by the electrostatic attraction between thenegatively charged electrons and the positive nucleus.
As children we have all spun a bucket, or some other object, tied to our handwith a piece of string. The centripetal force here is provided by the tension inthe string. Our hand, however, feels an outward tug; but thisis nothing morethan Newton’s third law of motion in action.
1.7.2 Angular velocity and acceleration
For simplicity, let us restrict ourselves to circular motion at a constant speed.This can either be specified in terms of anangular speed, ω, in rad s−1, or alinear speed, v, in m s−1; the former being related to a frequency,f , in cyclesper second through eqn (1.17). To see the connection betweenω andv, con-sider an orbit of radiusR. In a timet, the object will rotate through an angleθ = ω t and move a distancel = v t along an arc. Given also thatθ = l/R ,from the definition of radians,
v =l
t=
R θ
t= R ω . (1.39)
This scalar relationship can be generalized to a vector one between the angularand linear velocities,ω andv, by using avector(or cross) product:

18 Classical mechanics
The vector, or cross, product of two vectors
The second way in which two vectors,A andB, can be multiplied together is calleda ‘vector’ or ‘cross’ product. The former indicates that theresult of such a multipli-cation is a vector quantity, whereas the latter describes the symbol used to denote thistype of product. Geometrically, itsmodulus is the product of the lengths of the twovectors times the sine of the angle between them,
|A×B| = |A| |B| sin θ , (1.40)
and itsdirection is perpendicular to both and in the sense of a ‘right-hand screw’.That is to say, if the curl of the fingers on our right hand matches the sense of rotationneeded to go fromA to B, then the out-stretched thumb indicates the direction ofA×B. Algebraically, the components of the cross product are calculated through theformula:
A×B = (AyBz−By Az , AzBx−Bz Ax , AxBy−BxAy) , (1.41)
whereA=(Ax , Ay , Az) andB =(Bx , By , Bz).
v = ω×r , (1.42)
where the direction ofω is along the axis of rotation, in a‘right-hand screw’sense,|ω |= ω and r is any vector from the axis of rotation to the object inquestion. The modulus of this equation returns the simple connection betweenthe speeds in eqn (1.39),
v = |v| = |ω×r| = ω |r| sin α = ωR ,
whereα is the angle betweenω andr, but it also captures the directional aspectof the instantaneous motion.
The acceleration of the orbiting body can be ascertained by differentiatingeqn (1.42) with respect to time:
a =dv
dt= ω× dr
dt= ω×v , (1.43)
where we have implicitly assumed thatdω/dt = 0 and used the basic defini-tion v = dr/dt . Sincev is tangential to the circular orbit andω is axial, thecentripetal nature of the acceleration is recovered from the direction of theircross product. The magnitude of the acceleration reduces to
a = |a| = |ω×v| = ω v
becauseω andv are mutually perpendicular. Upon substitution forω or vfrom eqn (1.39),
a = ω2R =v2
R(1.44)
whereR is the radius of the circular motion.

1.7 Rotational motion 19
1.7.3 Torque and angular momentum
Tight nuts and bolts are loosened by using a spanner. Very sticky cases requirea stronger yank, or a wrench with a longer handle, or both. This suggests thatthe ‘turning force’ ortorque, G, involves both the magnitude of the (linear)force used,F , and the distance from the pivot,R , at which it is applied;
G = FR , (1.45)
perhaps? A more careful consideration of the situation leads to the definitionof the torque vector,G, as
G = r×F , (1.46)
wherer is the location, relative to the pivot (or origin), at which the force,F,is applied. Its magnitude is consistent with eqn (1.45) whenR is taken to bethe perpendicular distance between the pivot and the force,and its direction isnormal to the plane containingr andF and indicates the axis of the torque ina right-hand screw sense.
Just as torque is the rotational analogue of a force, theangular momentum
L = r×p (1.47)
is the rotational analogue of (linear) momentum,p. Indeed, they obey a rela-tionship that is equivalent to Newton’s second law of motion:
G =dL
dt. (1.48) F =
dp
dt
Torque and angular momentum are known as the‘moments’of the force andmomentum respectively. In the absence of a torque, the angular momentumremains constant.
1.7.4 The moment of inertia
For an object of massm moving in a circular orbit of radiusR at speedv, themagnitude of the angular momentum about the centre of the motion reduces to
L = |L| = R mv , (1.49)
because the linear momentum,p=mv, is perpendicular to the instantaneousdisplacement,r, (of lengthR) from the origin. It can be written in terms of theangular speed,ω, by using eqn (1.39):
L =(
mR2)
ω . (1.50)
Similarly, the kinetic energy of the circulating object is given by
KE = 12mv2 = 1
2
(
mR2)
ω2 . (1.51)
L = Iω
KE = 1
2Iω
2 =L2
2I
These formulae lead to the recognition of the quantity in brackets,
I = mR2 , (1.52)

20 Classical mechanics
as the rotational analogue of mass: themoment of inertia.For a set of point-masses that are all rotating about the sameaxis like a rigid
body, eqn (1.52) generalizes to
I =∑
j
mjR2j , (1.53)
wheremj is the mass of thejth entity andRj is its (perpendicular) distancefrom the axis of rotation. In the continuum limit of a solid object, the summa-tion is replaced by a corresponding three-dimensional integral over the massdensity. The important thing to note is thatI depends on the distribution ofthe mass relative to the axis of rotation. Spinning skaters,for example, changetheir moment of inertia by stretching out or drawing in theirarms and leg; con-sequently, their angular speed increases or decreases in accordance with theconservation of angular momentum (Iω = constant).
We should point out that the behaviour of a rigid body can always be anal-ysed in terms of the motion of itscentre of massand a rotation about an axisthrough it. For a symmetric diatomic molecule, such as hydrogen or oxygen,therefore, the relevant moment of inertia is calculated from an axis that passesthrough the mid-point of the bond. For rotation in the plane of the molecule,
I = m
(
d
2
)2
+ m
(
d
2
)2
=(m
2
)
d 2
wherem is the atomic mass andd is the bond length. For rotation about anaxis collinear with the bond,I≈ 0.
1.7.5 A comparison with linear motion
Exercise 1.5 Given that the H2 bond lengthis 0.075 nm, evaluate its moment of inertia.If the average rotational kinetic energy of H2
at a temperature ofT = 300 K is kT , wherek is the Boltzmann constant, determine theaverage angular momentum of the molecule.Hence estimate the rotational frequency of ahydrogen molecule at room temperature.
Let us conclude this section with a tabular summary that emphasizes the simi-larity between the basic notions and formulae involved in rotational and linear
Table 1.1 The correspondence between the formulae of linear and rotational motion.
Linear Rotational
displacement x angle θ
velocity v =dx
dtangular velocity ω =
dθ
dt
acceleration a =dv
dt=
d2x
dt2angular acceleration
dω
dt=
d2θ
dt2
inertia (mass) m moment of inertia I
momentum p = mv angular momentum L = Iω
force F =dp
dt= m
dv
dttorque G =
dL
dt= I
dω
dt
kinetic energy (KE)1
2mv2 =
p2
2mrotational KE
1
2Iω2 =
L2
2I

1.8 Limitations of classical mechanics21
motion. The results are given in Table 1.1. To simplify the comparison, the lin-ear motion has been restricted to lie along thex-axis and only the magnitudesof vector quantities have been considered.
1.8 Limitations of classical mechanics
While classical mechanics is immensely powerful in helpingus to understandeveryday phenomena, it has been found to breakdown in the limit of light-likespeeds, the vicinity of ultra-heavy objects and on atomic length scales. It isthen superseded by the theories ofrelativity andquantum mechanics. Evenin these circumstances, however, many of the elementary notions of classicalmechanics still play a central role.
1.9 Answers to exercises
1.1 4.0 km s−1.
1.2 Yes, because its direction (and, hence, velocity) is continually changing.
1.3 180 m.
1.4 1.5µm. Conservation of non-zero momentum⇒ 6.0µm.
1.5 I = 4.7× 10−48 kg m2. Root-mean-squareL = 2.0× 10−34 kg m2 s−1.Therefore,ω ≈ 4.2 × 1013 rad s−1 or f ≈ 6.7 GHz.
Quantity Value (SI units)
Planck constant (h) 6.626×10−34 J s
Boltzmann constant 1.380×10−23 J K−1
Avogadro constant 6.022×1023 mol−1
Permittivity of free space (ǫo) 8.854×10−12 Fm−1
Elementary charge (e) 1.602×10−19 C
Mass of an electron 9.109×10−31 kg
Mass of a proton 1.673×10−27 kg
Mass of a neutron 1.675×10−27 kg