Embed Size (px)
Citation preview
1
Aktory
Mechatronikai inteligentne systemy produkcyjne
2
Definicja aktora
Aktor (ang. actuator)-elektronicznie sterowany człon wykonawczy.
Aktor jest łącznikiem między urządzeniem przetwarzającyminformację (mikroprocesorem) i procesem, którego parametry należy zmieniać.
3
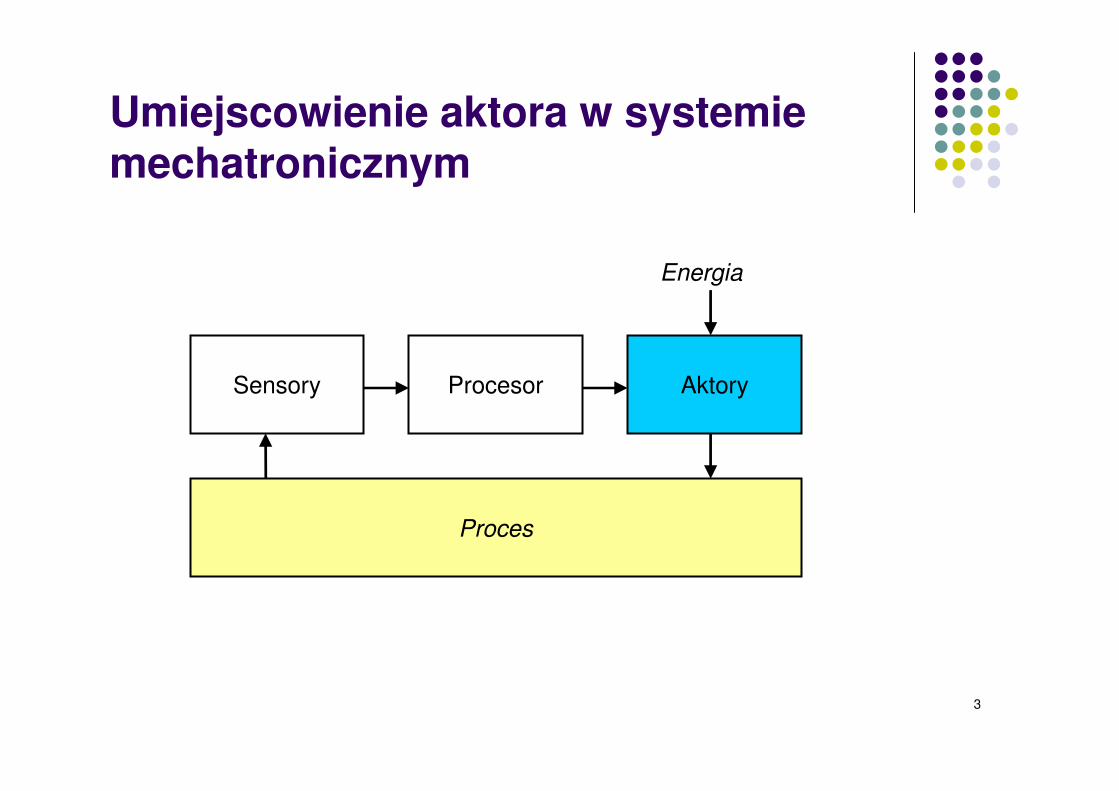
Umiejscowienie aktora w systemie mechatronicznym
Sensory Procesor Aktory
Proces
Energia
4
Cechy aktora
•Aktory pozwalają nastawiać w określony sposób (kierować) strumienie energii lub przepływy masy.
•Wielkością wyjściową aktora jest zazwyczaj energia mechaniczna.
•Wejście aktora jest sterowane elektrycznie (napięcie, prąd, wypełnienie impulsu, częstotliwość, słowo cyfrowe).
•Wzmocnienie mocy potrzebne sterowania dużym strumieniem energii za pomocą sygnału o małej mocy jest osiągane głównie na drodze elektrycznej, hydraulicznej lub pneumatycznej.
5
Wymagania stawiane aktorom
• Duża dokładność nastawiania (pozycjonowania)
• Możliwie dobra dynamika nastawiania
Te dwie grupy wymagań stoją do siebie w opozycji. Osiąganie dużej dokładności nastawiania odbywa się kosztem dynamiki i odwrotnie. Problem udaje się znacząco zminimalizować w zamkniętych obwodach sterowania położeniem (pozycją).
6
Czynniki ograniczające jakość regulacji
•Dokładność wykonania elementów mechanicznych
•Tarcie i straty w przekładniach
•Efekty histerezy i nasycania (np. magnetycznego)
•Nieliniowe charakterystyki statyczne
•Zmiany w procesie podlegającym sterowaniu
7
Budowa aktora
Aktor składa się z:
- przetwornika energii,- nastawnika energii.
Wielkością wejściową i wyjściową przetwornika energii jest energia, choć zazwyczaj następuje jej zamiana w inną formę, np.elektryczna->mechaniczna.
Wielkością wejściową nastawnika jest wspomniana wyżej wielkość elektryczna (energia pobierana ze źródła sygnału jest wielokrotnie mniejsza od energii przetwarzanej w przetworniku). Wielkością wyjściową jest sterowanie przetwarzaniem energii.
8
Tendencja rozwojowa aktorów
•Początkowo aktory były prostymi urządzeniami wykonawczymi o małej precyzji wykonania
•Z czasem zaczęto budować precyzyjne aktory, pozwalające na sterowanie szeroką gamą procesów
•W celu zwiększenia wydajności aktorów zaczęto zaopatrywać je w mikroprocesory, pozwalające na realizację podstawowych algorytmów sterowania wprost na pokładzie aktora, co poprawiło ich właściwości dynamiczne i zwiększyło dokładność bez zwiększania precyzji wykonania.
9
Tendencja rozwojowa aktorów- aktory inteligentne
•Dostarczenie aktorowi „inteligencji” pozwala na jego adaptację do aktualnych warunków otoczenia, co poprawia nastawianie, zmniejsza zużycie energii i zwiększa żywotność samego aktora.
Przykład – aktywne zawieszenie samochodu, przystosowujące się do rodzaju nawierzchni.
•Aktor inteligentny jest w rzeczywistości prostym systemem mechatronicznym.
10
Klasyfikacja aktorów
Aktory klasyfikuje się ze względu na formę energii pomocniczej, potrzebnej
do realizacji wybranego zadania. Najbardziej ogólny podział wyróżnia
aktory:
•Elektromechaniczne
•Hydrauliczne
•Pneumatyczne
•Niekonwencjonalne (inne)
11
Aktory elektromechaniczne
•Elektromagnesy
•Silniki prądu stałego
•Silniki prądu przemiennego
•Silniki krokowe
•Serwomechanizmy
•Inne
12
Aktory elektromechaniczne
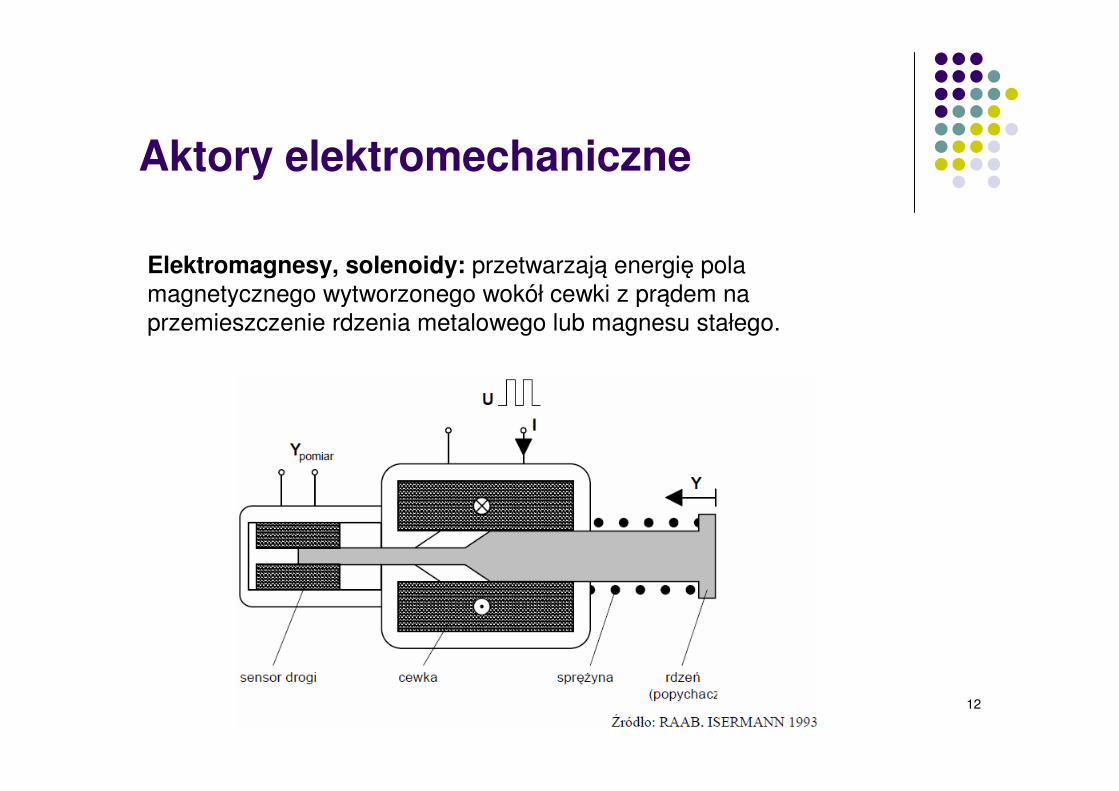
Elektromagnesy, solenoidy: przetwarzają energię pola
magnetycznego wytworzonego wokół cewki z prądem na
przemieszczenie rdzenia metalowego lub magnesu stałego.
13
Aktory elektromechaniczne
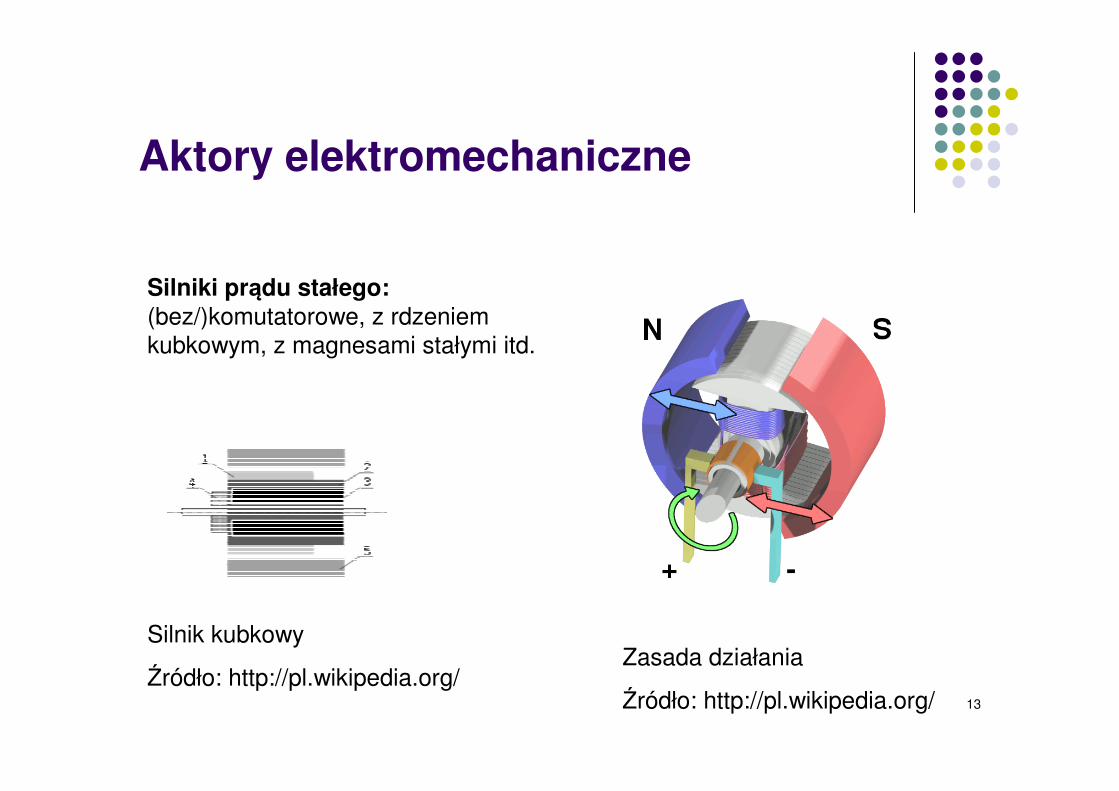
Silniki prądu stałego: (bez/)komutatorowe, z rdzeniem
kubkowym, z magnesami stałymi itd.
Zasada działania
Źródło: http://pl.wikipedia.org/
Silnik kubkowy
Źródło: http://pl.wikipedia.org/

14
Aktory elektromechaniczne
Silniki prądu przemiennego:silniki asynchroniczne wymagają ścisłej
kontroli kąta obroty, ale są proste i tanie
silniki synchroniczne pozwalają na
wymuszenie prędkości obrotowej
zależnej tylko od częstotliwości prądu
przemiennego.
Źródło: http://pl.wikipedia.org/
15
Aktory elektromechaniczne
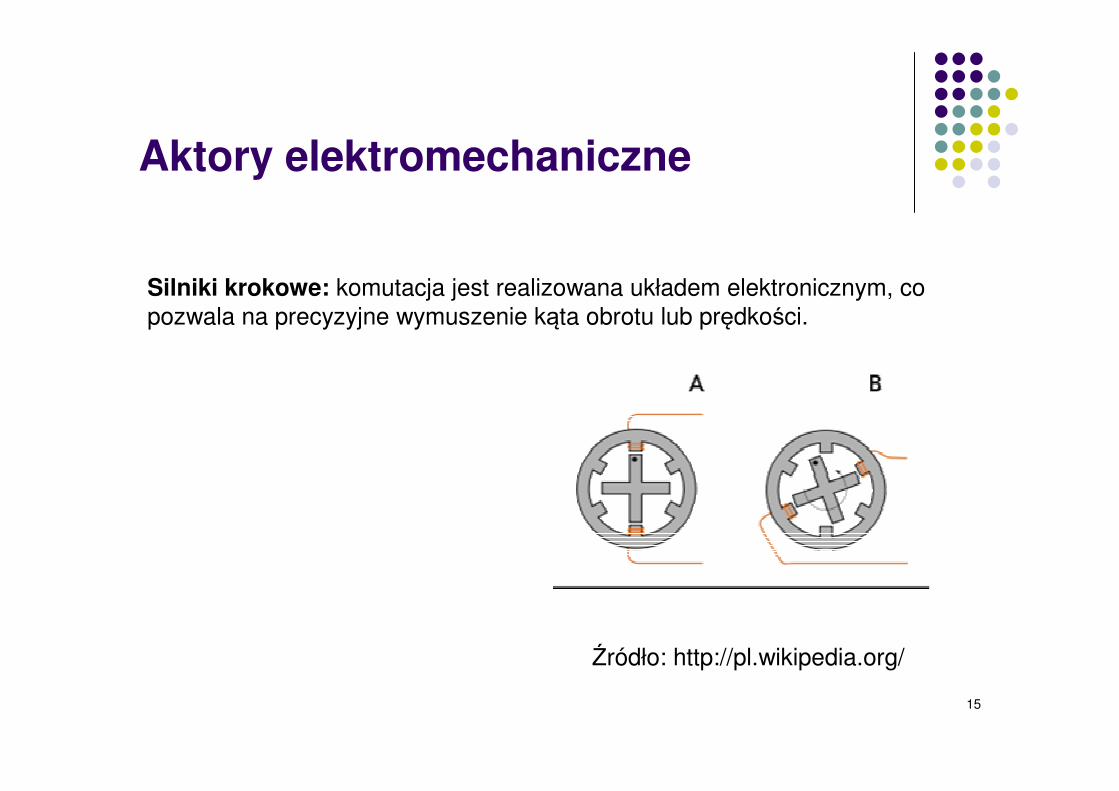
Silniki krokowe: komutacja jest realizowana układem elektronicznym, co
pozwala na precyzyjne wymuszenie kąta obrotu lub prędkości.
Źródło: http://pl.wikipedia.org/
16
Aktory elektromechaniczne
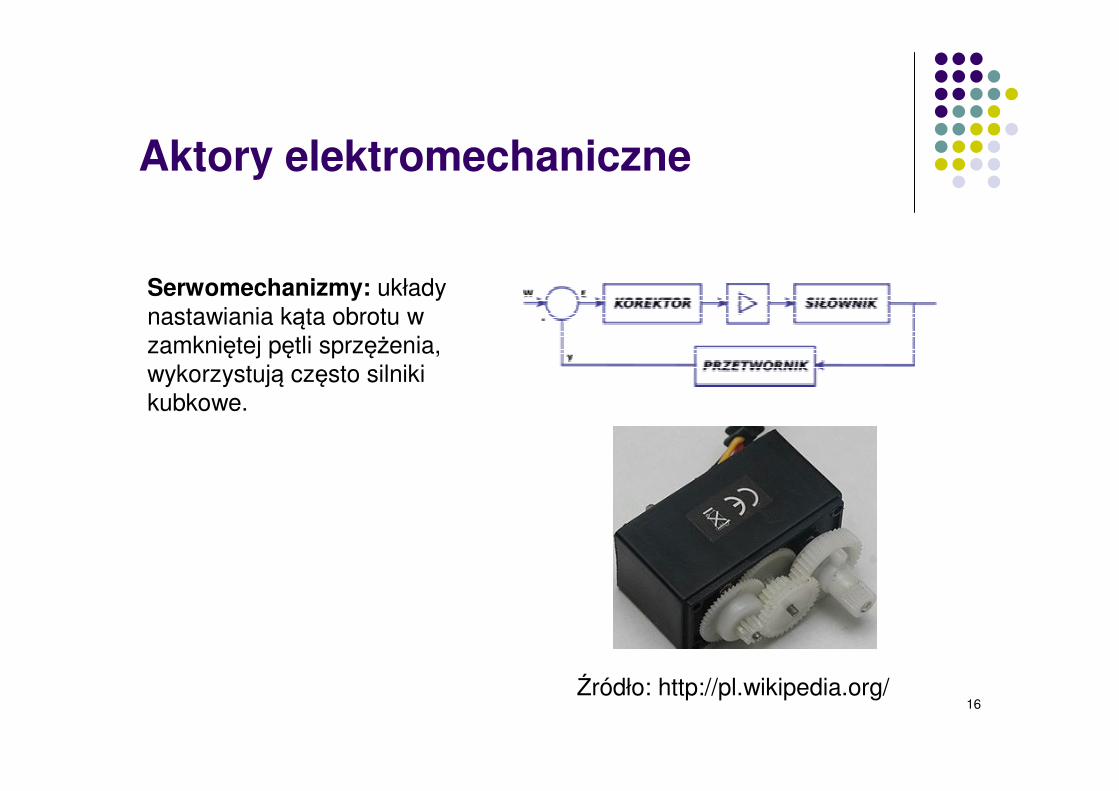
Serwomechanizmy: układy
nastawiania kąta obrotu w
zamkniętej pętli sprzężenia,
wykorzystują często silniki
kubkowe.
Źródło: http://pl.wikipedia.org/
17
Aktory hydrauliczne
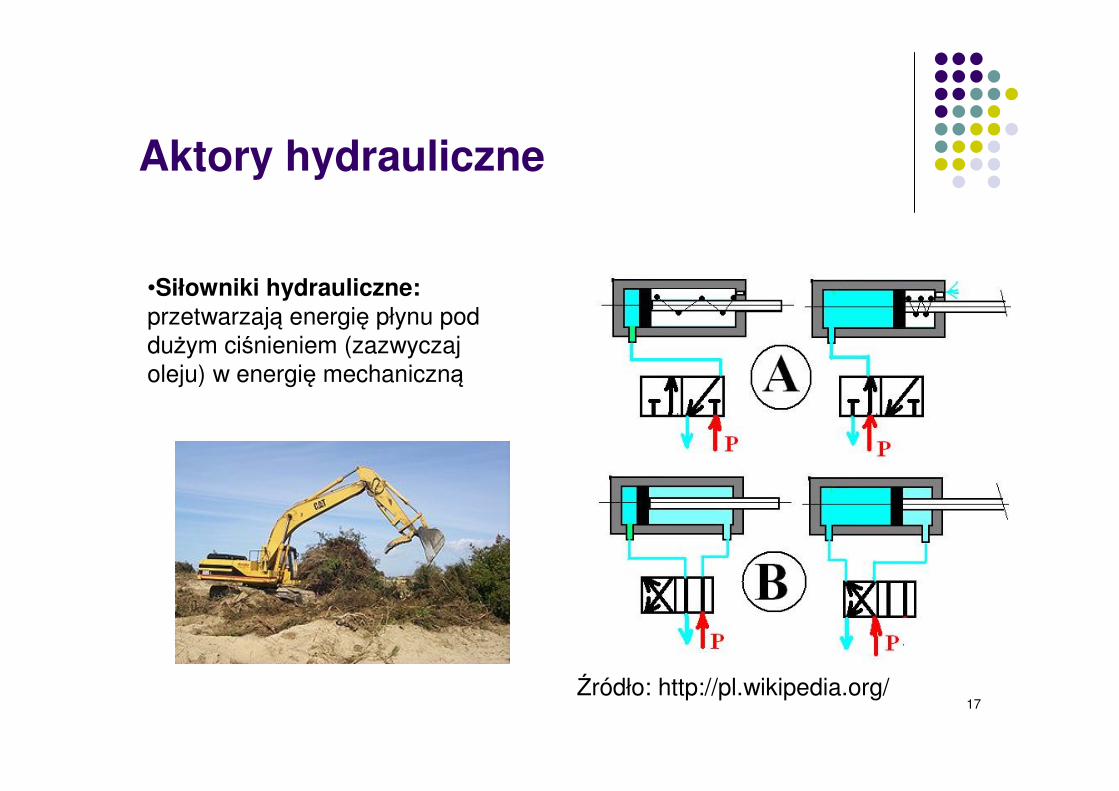
•Siłowniki hydrauliczne: przetwarzają energię płynu pod
dużym ciśnieniem (zazwyczaj
oleju) w energię mechaniczną
Źródło: http://pl.wikipedia.org/
18
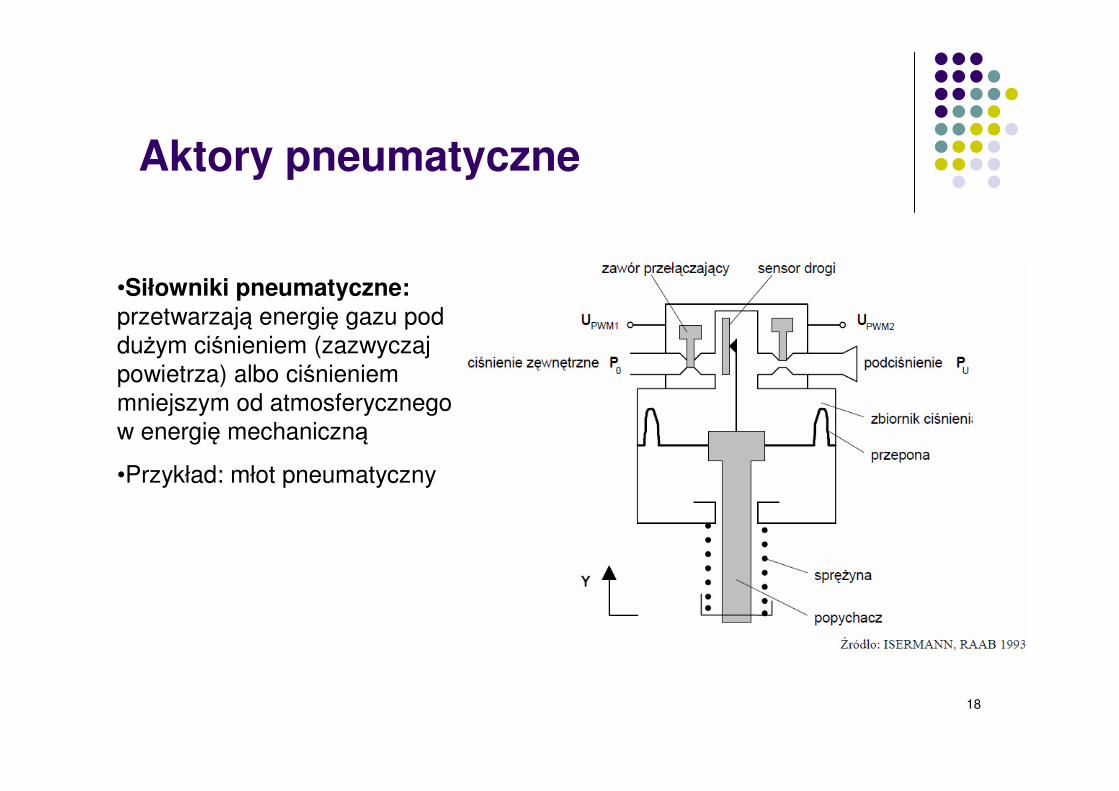
Aktory pneumatyczne
•Siłowniki pneumatyczne: przetwarzają energię gazu pod
dużym ciśnieniem (zazwyczaj
powietrza) albo ciśnieniem
mniejszym od atmosferycznego
w energię mechaniczną
•Przykład: młot pneumatyczny
19
Aktory niekonwencjonalne
•Piezoelektryczne
•Magnetostrykcyjne
•Elektrochemiczne
•Termobimetaliczne
•Inne
Źródło: http://pl.wikipedia.org/
Źródło: http://www.matint.pl/materialy-
elektrostrykcyjne.php
20
Najważniejsze parametry aktorów
•Siła nastawiania w funkcji prędkości
•Siła nastawiania w funkcji zakresu nastawiania
•Moc maksymalna w funkcji masy
21
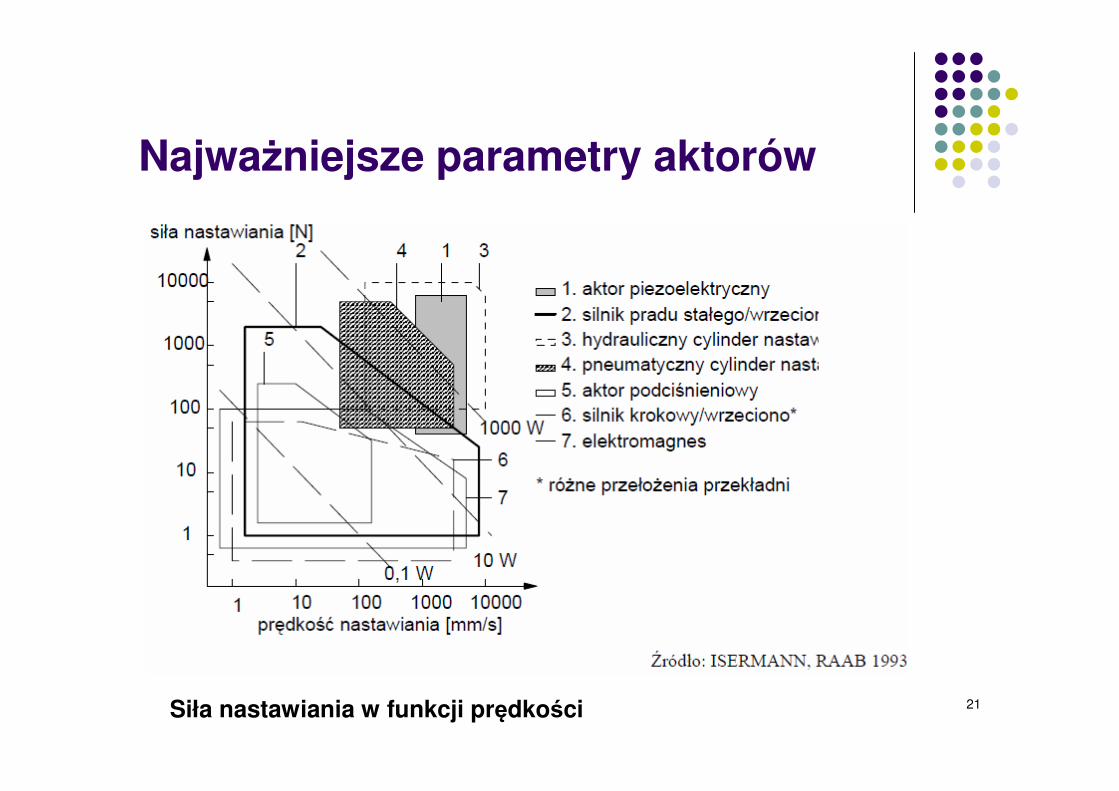
Najważniejsze parametry aktorów
Siła nastawiania w funkcji prędkości
22
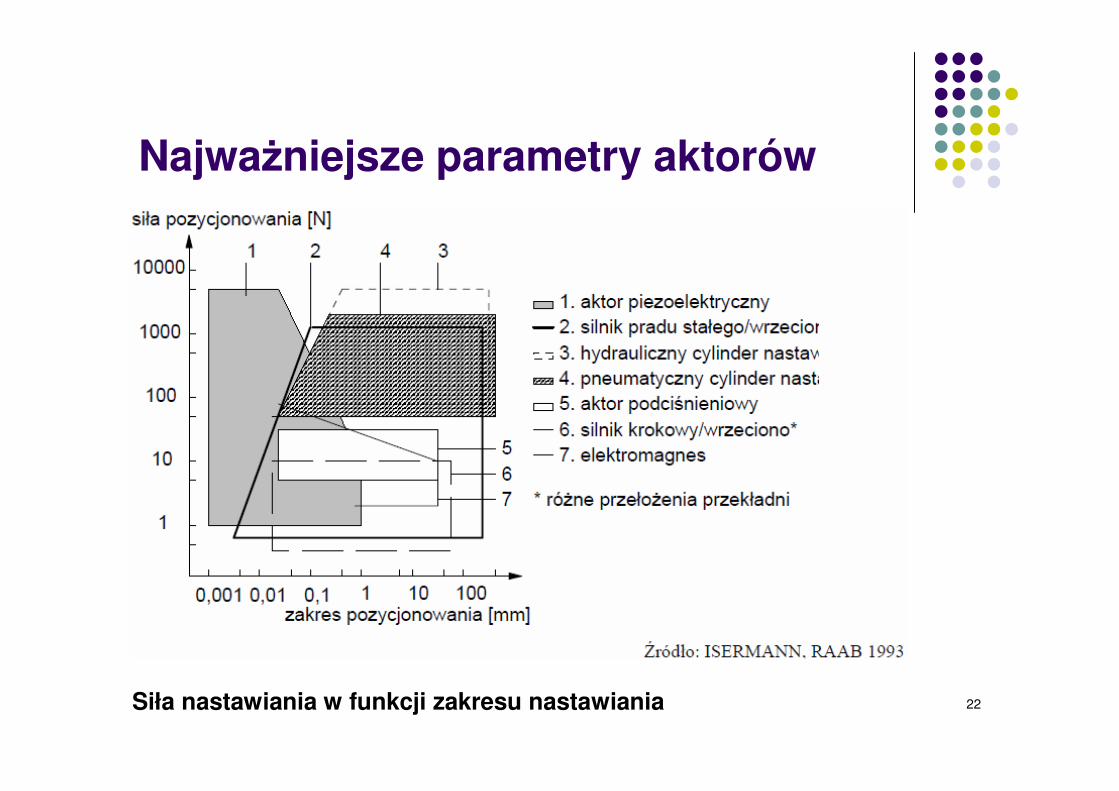
Najważniejsze parametry aktorów
Siła nastawiania w funkcji zakresu nastawiania
23
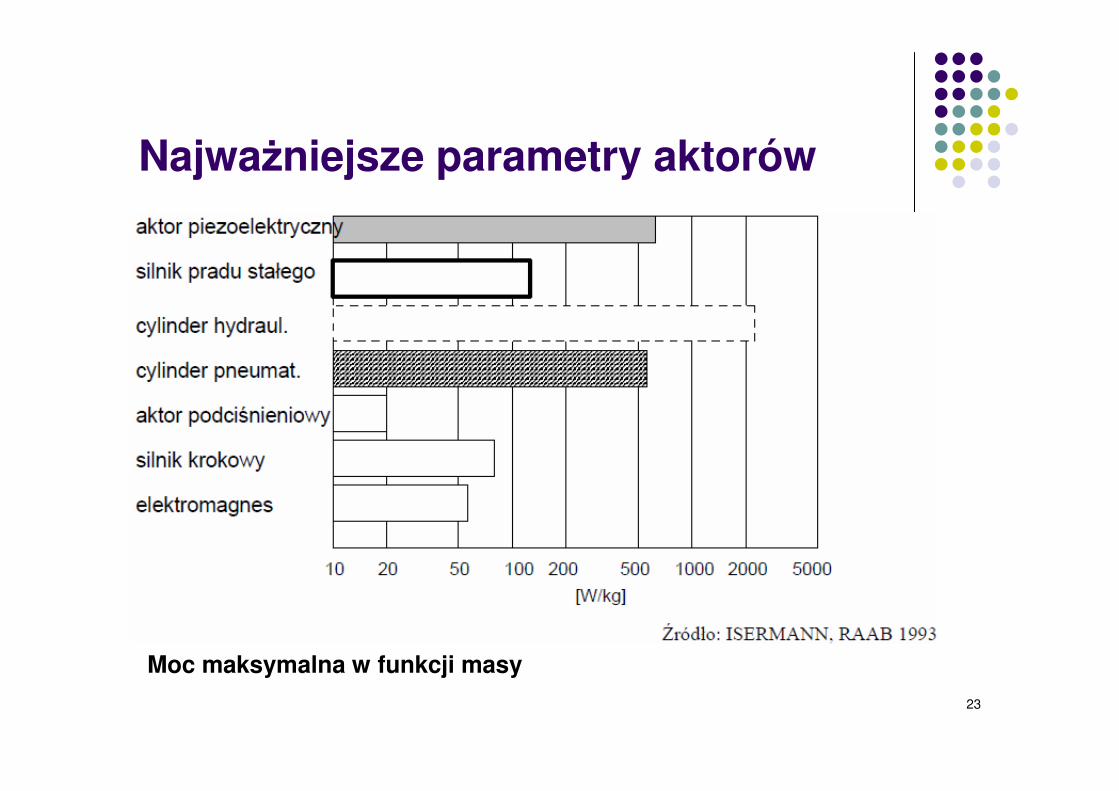
Najważniejsze parametry aktorów
Moc maksymalna w funkcji masy




![F]QH - bc.ore.edu.plpomagac+uczniom+rozwijac... · czyli inteligencja to „ogólna zdolność korzystania z doświadczeń”. Według Sterna „inteligencja jest to zdolność nastawiania](https://img.pdfslide.net/doc/110x75/5c75d77b09d3f2941e8bc705/fqh-bcoreedupl-pomagacuczniomrozwijac-czyli-inteligencja-to-ogolna.jpg)






