Embed Size (px)
Citation preview

Memory ManagementMemory ManagementMemory ManagementMemory Management

Managing Memory … The Simplest Case
The O/S
User Program
0
0xFFF …
* Early PCs and Mainframes* Embedded Systems
One user program at a time.
The logical address space is the same as the physical address space.

But in most modern But in most modern systems …systems …
But in most modern But in most modern systems …systems …
Modern memory managers subdivide memory to accommodate multiple processes.
Memory needs to be allocated efficiently to pack as many processes into memory as possible
When required a process should be able to have exclusive use of a block of memory, or permit sharing of the memory by multiple processes.
Primary memory is abstracted so that a program perceives that the memory allocated to it is a large array of contiguously addressed bytes (but it usually isn’t).
Modern memory managers subdivide memory to accommodate multiple processes.
Memory needs to be allocated efficiently to pack as many processes into memory as possible
When required a process should be able to have exclusive use of a block of memory, or permit sharing of the memory by multiple processes.
Primary memory is abstracted so that a program perceives that the memory allocated to it is a large array of contiguously addressed bytes (but it usually isn’t).

* Relocation* Protection* Sharing* Physical Organization
Memory Managers: Four ConcernsMemory Managers: Four Concerns

RelocationRelocationRelocationRelocation
The Programmer does not know where the The Programmer does not know where the program will be placed in memory when it is program will be placed in memory when it is executed. While the program is executing, it may executed. While the program is executing, it may be swapped to disk and returned to main memory be swapped to disk and returned to main memory at a different location (relocated). Memory at a different location (relocated). Memory references in the code must be translated to references in the code must be translated to actual physical memory addressactual physical memory address

Process’s logicaladdress space
Physical addressspace

ProtectionProtectionProtectionProtection
With multiple processes in memory and running simultaneously” the system must protect one process from referencing memory locations in another process. This is more of a hardware responsibility than it is an operating system responsibility.

Loading and Linking a ProgramLoading and Linking a Program
Source Compiler
Relocatable Object Module
Relocatable Object Modules
Linker
Load Module
Program SegmentData SegmentStack Segment
Library Modules
All references to data orfunctions are resolved…

Loader
Load Module
Process ImageIn Main Memory

Load Module
Process ImageIn Main Memory
Absolute LoaderAbsolute Loader
program
data
program
data
0 0
no changes in addresses

Load Module
Process ImageIn Main Memory
Static BindingStatic Binding
program
dataprogram
data
0
All addresses in thecode segment arerelative to 0
Add the offset to everyaddress as the code isloaded.
Offset = 1000
Jump 400
Jump 1400
1000

Load Module
Process ImageIn Main Memory
Dynamic Run-time BindingDynamic Run-time Binding
program
dataprogram
data
0
All addresses in thecode segment arerelative to 0
Offset = 1000
Jump 400
Jump 400
Addresses are maintained inrelative format
Address translationtakes place on thefly at run time.

program
data
Base Register
Limit Register
jump, 400
Adder
Comparatorabsolute address
interrupt
1000
relative address400
1400
segment error!

A Code ExampleA Code Example
. . .
static int gVar;
. . . int function_a(int arg) { . . .
gVar = 7; libFunction(gVar); . . .}
static variables are stored in the data segment.
generated code will be stored in the code segment.
libFunction( ) is defined in an external module. At compile time we don’t know the address of its entry point

A Code Example
. . .
static int gVar;
. . . int function_a(int arg) { . . .
gVar = 7; libFunction(gVar); . . .}
0000 . . . . . . 0008 entry function_a . . . 0220 load r1, 7 0224 store r1, 0036 0228 push 0036 0228 call libFunction . . .
0400 External Reference Table . . . 0404 “libFunction” ???? . . . 0500 External Definition Table . . . 0540 “function_a” 0008 . . . 0600 Symbol Table . . . 0799 End of Code Segment
. . . 0036 [space for gVar] . . . 0049 End of Data segment
Code S
eg
ment
Data
Seg
relative addresses
compile

0000 . . . . . . 0008 entry function_a . . . 0220 load r1, 7 0224 store r1, 0036 0228 push 0036 0228 call libFunction . . .
0400 External Reference Table . . . 0404 “libFunction” ???? . . . 0500 External Definition Table . . . 0540 “function_a” 0008 . . . 0600 Symbol Table . . . 0799 (end of code segment)
. . . 0036 [space for gVar] . . . 0049 (end of data segment)
libFunction
0000 (other modules) . . . 1008 entry function_a . . . 1220 load r1, 7 1224 store r1, 0136 1228 push 1036 1232 call 2334 . . . 1399 (end of function_a) . . . (other modules) 2334 entry libFunction . . . 2999 (end of code segment)
. . .0136 [space for gVar]. . . 1000 (end of data segment)
relative addresses
Code S
egm
ent
Data
seg
link
Object File
Contains an external definition tableIndicating the relative entry point

0000 (other modules) . . . 1008 entry function_a . . . 1220 load r1, 7 1224 store r1, 0136 1228 push 0136 1232 call 2334 . . . 1399 (end of function_a) . . . (other modules) 2334 entry libFunction . . . 2999 (end of code segment)
. . . 0136 [space for gVar] . . . 1000 (end of data segment)
0000 (other modules) . . . 5008 entry function_a . . . 5220 load r1, 7 5224 store r1, 7136 5228 push 7136 5232 call 6334 . . . 5399 (end of function_a) . . . (other modules) 6334 entry libFunction . . . 6999 (end of code segment)
. . . 7136 [space for gVar] . . . 8000 (end of data segment)
real addresses
staticbind
loaderLoad Module

SharingSharingSharingSharing
Multiple processes (fork) running the same executable
Shared memory

Physical OrganizationPhysical OrganizationPhysical OrganizationPhysical Organization
The flow of information between the various“levels” of memory.

Registers
Cache
RAM
Disk
Optical, Tape, etc
fast but expensive
cheap but slow
1 machine cycle

Memory AllocationMemory Allocation
Before an address space can be bound to physical addresses, the memory manager must allocate the space in real memory where the address space will be mapped to. There are a number of schemes to do memory allocation.

Fixed PartitioningFixed PartitioningFixed PartitioningFixed PartitioningEqual-size fixed partitions
any process whose size is less than or equal to the partition size can be loaded into an available partition
if all partitions are full, the operating system can swap a process out of a partition
a program may not fit in a partition. Then the programmer must design the program with overlays
Equal-size fixed partitions
any process whose size is less than or equal to the partition size can be loaded into an available partition
if all partitions are full, the operating system can swap a process out of a partition
a program may not fit in a partition. Then the programmer must design the program with overlays

Fixed PartitioningFixed PartitioningFixed PartitioningFixed Partitioning
Main memory use is inefficient. Any program, no matter how small, occupies an entire partition. This is called internal fragmentation.
But . . . It’s easy to implement.
Main memory use is inefficient. Any program, no matter how small, occupies an entire partition. This is called internal fragmentation.
But . . . It’s easy to implement.

Placement Algorithm with Fixed Placement Algorithm with Fixed Size PartitionsSize Partitions
Placement Algorithm with Fixed Placement Algorithm with Fixed Size PartitionsSize Partitions
Equal-size partitionsbecause all partitions are of equal size, it does not matter which partition is used Placement is trivial.
Equal-size partitionsbecause all partitions are of equal size, it does not matter which partition is used Placement is trivial.

Fixed Partition with Fixed Partition with Different SizesDifferent Sizes
Fixed Partition with Fixed Partition with Different SizesDifferent Sizes
Example is OS/360 MFT. The operator fixed the partition sizes at system start up.
Two options: * Separate Input Queues * Single Input Queue

Multiple Input QueuesMultiple Input QueuesMultiple Input QueuesMultiple Input Queues
O/S0
100K
200K
400K
700K
800K
Partition 1
Partition 2
Partition 3
Partition 4
Jobs are put into the queuefor the smallest partition bigenough to hold them.
Disadvantage?
Memory can go unused,even though there arejobs waiting to run thatwould fit.
Single Input QueueSingle Input QueueSingle Input QueueSingle Input Queue
O/S0
100K
200K
400K
700K
800K
Partition 1
Partition 2
Partition 3
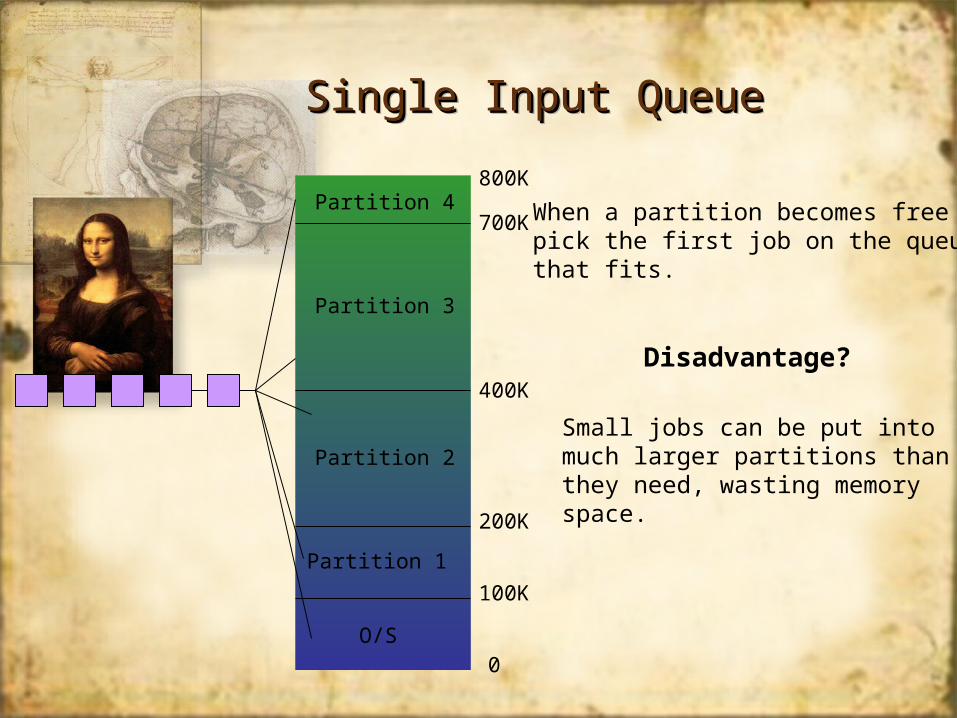
Partition 4 When a partition becomes freepick the first job on the queuethat fits.
Disadvantage?
Small jobs can be put intomuch larger partitions thanthey need, wasting memoryspace.

Single Input QueueSingle Input QueueSingle Input QueueSingle Input Queue
O/S0
100K
200K
400K
700K
800K
Partition 1
Partition 2
Partition 3
Partition 4 Alternative Solution – scan thewhole queue and find the jobthat best fits.
Disadvantage?
Discriminates against small jobs. Starvation.

CPU UtilizationCPU UtilizationCPU UtilizationCPU Utilization
From a probabalistic point of view ….
Suppose that a process spends a fraction p of its timewaiting for I/O to complete. With n processes in memoryat once, the probability that all n processes are waitingfor I/O (in which case the CPU is idle) is p n.
CPU utilization is therefore given by the formula
CPU Utilization = 1 – p n

Consider the case where processes spend 80% of their timewaiting for I/O (not unusual in an interactive end-user systemwhere most time is spent waiting for keystrokes). Notice thatit requires at least 10 processes to be in memory to achievea 90% CPU utilization.
Predicting PerformancePredicting PerformancePredicting PerformancePredicting Performance
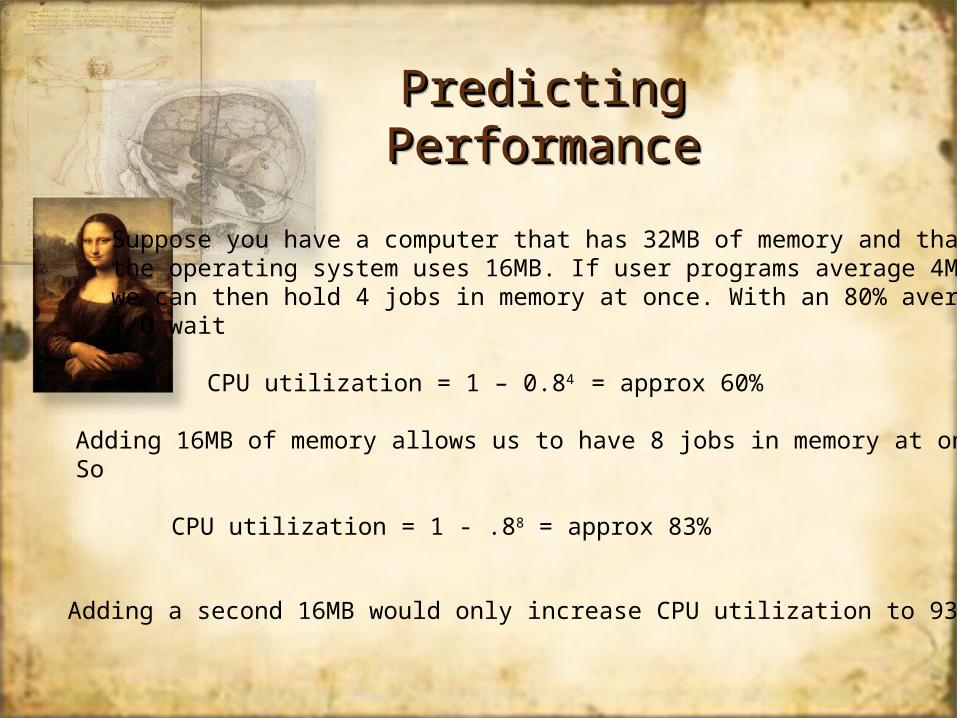
Suppose you have a computer that has 32MB of memory and that the operating system uses 16MB. If user programs average 4MBwe can then hold 4 jobs in memory at once. With an 80% averageI/O wait
CPU utilization = 1 – 0.84 = approx 60%
Adding 16MB of memory allows us to have 8 jobs in memory at onceSo
CPU utilization = 1 - .88 = approx 83%
Adding a second 16MB would only increase CPU utilization to 93%

Dynamic PartitioningDynamic PartitioningDynamic PartitioningDynamic Partitioning
Partitions are of variable length and number.A process is allocated exactly as much memory as it requires.
Eventually you get holes in the memory. This is called external fragmentation.
You must use compaction to shift processes so they are contiguous and all free memory is in one block.
Partitions are of variable length and number.A process is allocated exactly as much memory as it requires.
Eventually you get holes in the memory. This is called external fragmentation.
You must use compaction to shift processes so they are contiguous and all free memory is in one block.

O/S 8M
56M
ForExample …

O/S 8M
Process 1 20M
36M

O/S 8M
Process 1 20M
Process 2 14M
18MProcess 3
8M
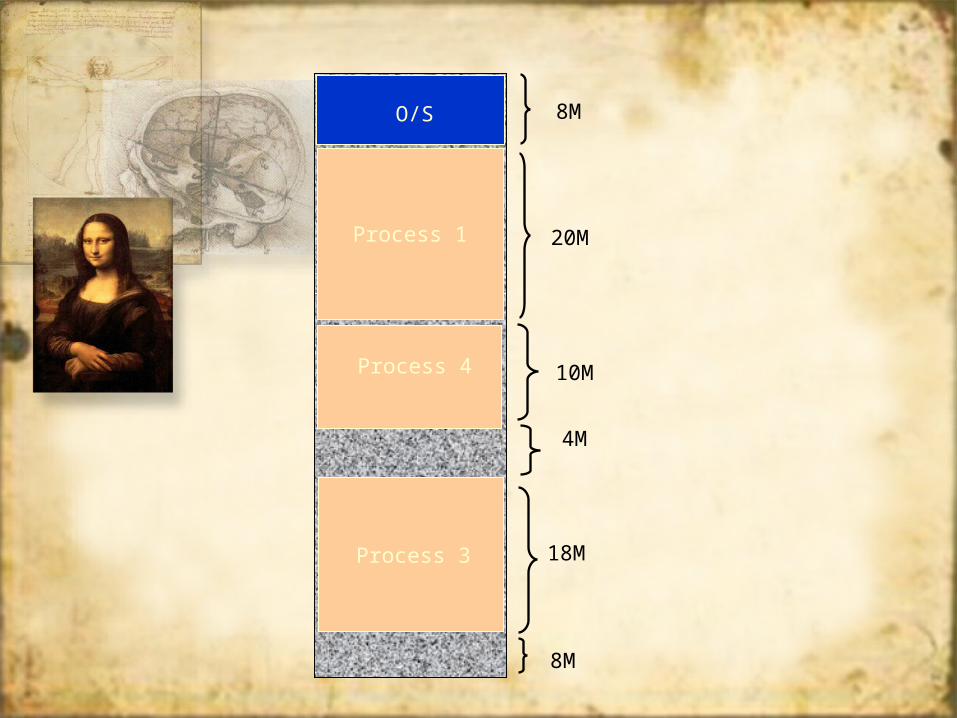
O/S 8M
Process 1 20M
10M
18MProcess 3
8M
Process 4
4M
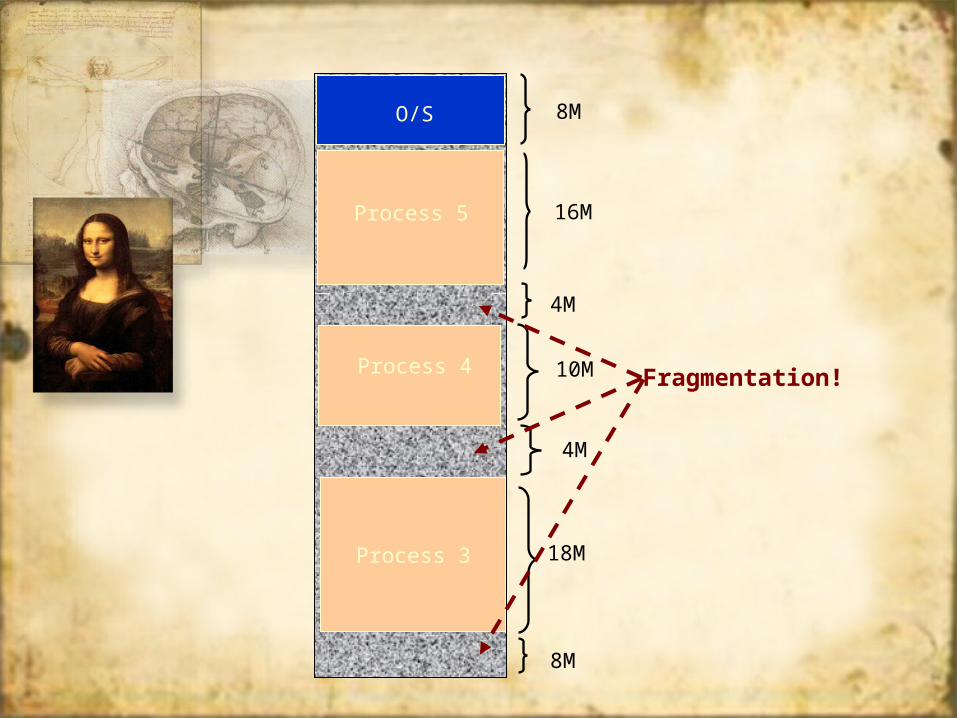
O/S 8M
16M
10M
18MProcess 3
8M
Process 4
4M
Process 5
4M
Fragmentation!

Periodically the O/S could do memory compaction – likedisk compaction. Copy all of the blocks of code for loadedprocesses into contiguous memory locations, thus openinglarger un-used blocks of free memory.
The problem is that this is expensive!
A related question: How much memory do you allocate to a process when it is created or swapped in?
In most modern computer languages data can be created dynamically.

The HeapThe HeapThe HeapThe Heap
This may come as a surprise….
Dynamic memory allocation with malloc, or new, does not reallycause system memory to be dynamically allocated to the process.
In most implementations, the linker anticipates the use of dynamicmemory and reserves space to honor such requests. The linkerreserves space for both the process’s run-time stack and it’s heap. Thus a malloc( ) call returns an address within the existing address space reserved for the process.
Only when this space is used up does a system call to the kernel take place to get more memory. The address space may have to be rebound.

Managing Dynamically Managing Dynamically Allocated MemoryAllocated Memory
Managing Dynamically Managing Dynamically Allocated MemoryAllocated Memory
When managing memory dynamically, the operating system must keep track of the free and used blocks of memory.
Common methods used are bitmaps and linked lists.

Linked List AllocationLinked List AllocationLinked List AllocationLinked List Allocation
P 0 5 H 5 3 P 8 6 P 14 4
H 18 2 P 20 6 P 26 3 H 29 3 X
Hole
Starts at
Length
Process
Memory is divided up into somenumber of fixed size allocationunits.
Keep List in order sorted by address
Linked List AllocationLinked List AllocationLinked List AllocationLinked List Allocation
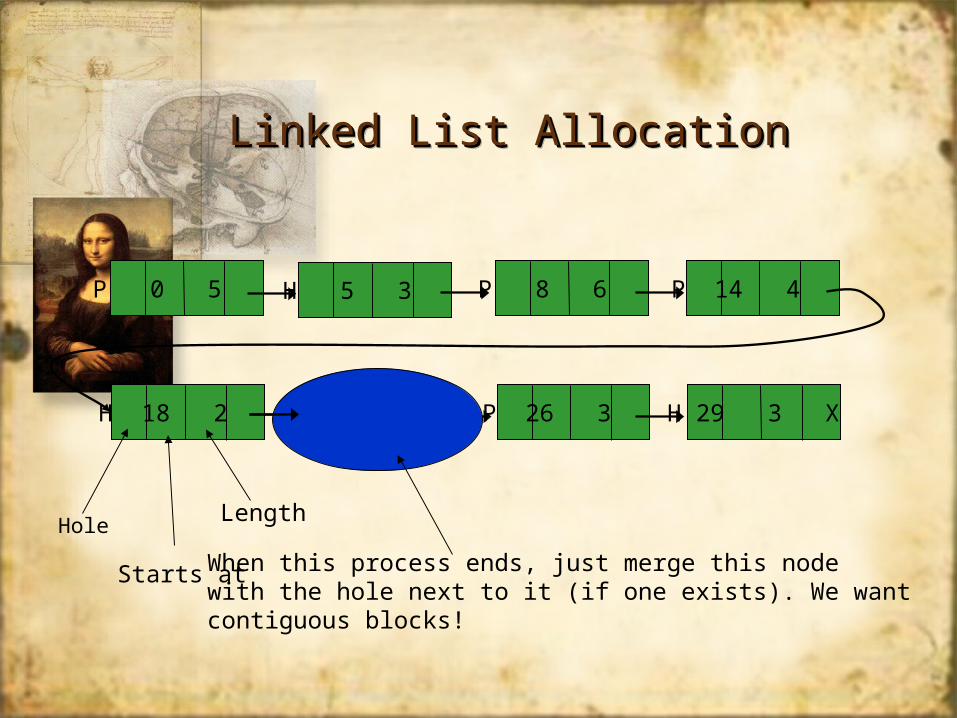
P 0 5 H 5 3 P 8 6 P 14 4
H 18 2 P 20 6 P 26 3 H 29 3 X
When this process ends, just merge this node with the hole next to it (if one exists). We wantcontiguous blocks!
Hole
Starts at
Length

Linked List AllocationLinked List AllocationLinked List AllocationLinked List Allocation
P 0 5 H 5 3 P 8 6 P 14 4
H 18 8 P 26 3 H 29 3 X
When blocks are managed this way, there are several algorithms thatthe O/S can use to find blocks for a new process, or one beingswapped in from disk.
Hole
Starts at
Length

Dynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement AlgorithmsDynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement Algorithms
Best-fit algorithmSearch the entire list and choose the block that is
the smallest that will hold the request. This algorithmis the worst performer overall, since the smallest possible block is found for a process, this algorithm tends to leave
lots of tiny holes that are not useful.

smallest block that process will fit in
tiny hole
Dynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement AlgorithmsDynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement Algorithms
Worst-fit – a variation of best fitThis scheme is like best fit, but when looking for a new block it picks the largest block of unallocated memory.
The idea is that external fragmentation will result in bigger holes, so it is more likely that another block will fit.
Largest block of unallocated memory
big hole
Dynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement AlgorithmsDynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement Algorithms
First-fit algorithmFinds the first block in the list that will fit.
May end up with many process loaded in the front end of memory that must be searched over when trying to
find a free block

Dynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement AlgorithmsDynamic Partitioning Dynamic Partitioning Placement AlgorithmsPlacement Algorithms
Next-fit – a variation of first fitThis scheme is like first fit, but when looking for a new block, it begins its search where it left off the last time. This algorithm actually performs slightly
worse than first fit

SwappingSwapping
Used primarily in timeshared systems with single thread processes.
Optimizes system performance by removing a process from memory when its thread is blocked.
When a process is moved to the ready state, the process manager notifies the memory manager so that the address space can be swapped in again when space is available.
Requires relocation hardware
Swapping can also be used when the memory requirements of the processes running on the system exceed available memory.

System Costs to do SwappingIf a process requires S units of primary storage, and a disk block holds D units of primary storage, then
ceiling(S/D)
disk writes are required to swap the address space to disk. The same number of reads are required to swap the address space back into primary storage.
For example, if a process is using 1000 bytes of memory, anddisk blocks are 256 bytes, then 4 disk writes are required.

Suppose that a process requiring S units of primary storage is blocked for T units of time. The resource wasted because the process stays in memory is
S x T.
What criteria would you use to determine whether or not to swap the process out of primary storage?

Suppose that a process requiring S units of primary storage is blocked for T units of time. The resource wasted because the process stays in memory is
S x T.
What criteria would you use to determine whether or not to swap the process out of primary storage?
How big is S ? If it is small, then the amount of storage made available for other processes to use is minimized, and another process may not fit. Swapping would be wasteful if there is nota process that would fit in the storage made available.

Suppose that a process requiring S units of primary storage is blocked for T units of time. The resource wasted because the process stays in memory is
S x T.
What criteria would you use to determine whether or not to swap the process out of primary storage?
If T is small, then the process will begin competing for primary storage too quickly to make the swap effective.
If T < R, the process will begin requesting memory before it is even completely swapped out (R is the time required to swap).

Suppose that a process requiring S units of primary storage is blocked for T units of time. The resource wasted because the process stays in memory is
S x T.
What criteria would you use to determine whether or not to swap the process out of primary storage?
For swapping to be effective, T must be considerably larger than 2R for every process that the memory manager chooses to swap out, and S must be large enough for other processes to execute.
S is known. Can T be predicted?

S is known. Can T be predicted?
When a process is blocked on a slow I/O device, the memory manager can estimate a lower bound.
What about when a process is blocked by a semaphore operation?
Example Test Questions
A memory manager for a variable sized region strategy has afree list of memory blocks of the following sizes:
600, 400, 1000, 2200, 1600, 2500, 1050
Which block will be selected to honor a request for 1603 bytesUsing a best-fit policy? 2200
Which block will be selected to honor a request for 949 bytesUsing a best-fit policy? 1000
Which block will be selected to honor a request for 1603 bytesUsing a worst-fit policy? 2500

If you were designing an operating system, and had to determine the best way to sort the free block list, how would you sort it for each of the following policies, and why?
Best-fit Smallest to largest free block
Worst-fit Largest to smallest free block












![Mainframes Refresher[2]](https://img.pdfslide.net/doc/110x75/577d20a81a28ab4e1e936e78/mainframes-refresher2.jpg)















