Embed Size (px)
Citation preview

MÉTHODE DE RECONSTRUCTION
TOMOGRAPHIQUE BASÉE SUR
MAILLAGES ADAPTATIFS
CIVA 11 : NOUVEAUTÉS EN
CT, VAR & POD
18 avril 2013
Club Image 3D NOESIS | Marius COSTIN
Laboratoire Images Tomographie et Traitement
CEA | 11 OCTOBRE 2012 | PAGE 1
1 / 40

INTRODUCTION
CIVA Simulation Platform
The world reference for NDT simulation & expertize
Developed by 4 labs at CEA-LIST
More than 170 customers worldwide (> 250 licences)
Industries, SMEs, research centers, academics
A multi-technique software platform
UT, ET, RT, CT, GWT
A valorization platform
Collaborations with many leading labs (industries and academics)
ET : 2D map of a complex defect
UT : Transmitted beam computation
RT : weld inspection CT : tomographic reconstruction
of complex parts
2 / 40

CIVA RT-CT (Radiographic Testing - Computed Tomography)
From CIVA RT to CIVA CT (CIVA Tomo)
CT set-up Part, source,
detector, motion,
defects
Source positions
Rotation axis
Detector
X-Ray
projections
CIVA
RT
CT
Reconstruction
CT data (images & volume)
3 / 40

CT Reconstruction From Few Projections - Comparison
FDK PixTV GradTV
Reconstruction from 32 projections (512x512 pixels)
NEW FEATURES OF CIVA 11
4 / 40

NEW FEATURES OF CIVA 11
Import Experimental CT Data New functionality to import experimental data process and reconstruct
Import wizard
5 / 40

NEW FEATURES OF CIVA 11
Import Experimental Data Reconstruction
6 / 40

NEW FEATURES OF CIVA 11
VAR & POD Modules
o Variation multi-configuration project – modify flaw size, position, orientation, etc.
o Probability Of Detection POD curve
7 / 40

NEW FEATURES OF CIVA 11
POD Results Page
Data table
Data plot +
Statistical regression
Plot of
residuals
POD curve
Statistics
Signal Response
Thresholds
8 / 40

CIVA 11
Current and Future Developments
RT : detectors : spectral / window, MC for electrons, etc…
CT : advanced reconstruction algorithms : multi-resolution, multi-energy, phase
contrast, scattering correction, etc.
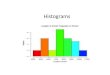
Data analysis
image tools : histograms, filters, profiles, etc.
improvement of POD functionality / experimental data
Experimental data import
corrections, calibrations
Robotized CT
Gerim 2 platform
PhD on CT reconstruction on non-standard trajectories
9 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Méthode de reconstruction adaptative entomographie par rayons X : Optimisation sur
architecture parallèle de type GPU
Soutenance de thèseprésentée par
Michele Arcangelo Quinto
dirigée par Dominique Houzet (Gipsa-lab)encadrée par Fanny Buyens (CEA LIST)
thèse préparée au sein du LITTLaboratoire Imagerie Traitement et Tomographie,
CEA LIST
5 Avril 2013
10 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Contexte
Contrôle de conformité (enutilisant le modèle CAO)
Analyse quantitative
Dimensionnement del'objet
Segmentation dedi�érentes structures Ref :http: // biomedical. materialise. com/ mimics
Mousse de nickel Fibres de carbone
11 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Approche proposée
Méthode de reconstruction itérative en tomographie par rayons Xsimultanée à la segmentation :
réduction du nombre d'éléments à estimer
représentation des images par un maillage s'adapatant aucontenu
réduction de la taille de stockage des images reconstruites
optimisation de la reconstruction sur des architecturesparallèles
12 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Adaptive Triangular Mesh (ATM) : Aperçu
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la taille de f̂
ou
13 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Adaptive Triangular Mesh (ATM) : Aperçu
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la tallie de f̂
ou
14 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Adaptive Triangular Mesh (ATM) : Aperçu
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la tallie de f̂
ou
15 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Adaptive Triangular Mesh (ATM) : Aperçu
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la tallie de f̂
ou
16 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Adaptive Triangular Mesh (ATM) : Aperçu
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la tallie de f̂
ou
Synopsis de l'algorithme développé : ATM 17 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Méthode de reconstruction tomographique
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la tallie de f̂
ou
18 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Méthode de reconstruction tomographique
Algorithmes de reconstruction itératif adaptés aux grillesirrégulières composées d'éléments triangulaires (2D) ettétraédriques (3D) :
p = Hf
Expectation-Maximization (EM)
Gradient Conjugué (GC)
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0 5 10 15 20 25 30 35 40 45 50fonctiondecoûtJ
Nombre des itérations
EMGradient Conjugué
GC plus performance (meilleure vitesse de convergence)
19 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Méthode de reconstruction tomographique
Calcul de la matrice de projection H :
les éléments hi ,j représentent la longueur du rayon i interceptépar l'élément de maillage j
développement du calcul de l'opérateur de projection selon uneméthode de lancer de rayons
ligne de projection ies
détecteur linéaire
`
ligne de projection ies
détecteur linéaire
`
20 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Segmentation
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la taille de f̂
21 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Segmentation : passage vers une grille régulière pixelisée
Passage d'une grille irrégulière àune grille réguilière
image(i,j)= triangle(x,y)
Passage d'une grille réguilière àune grille irrégulière
trangle(x,y)= image[i][j]
Résolution de la grille régulière :
dx =δx
l̄M·Nx , où
{δx résolution dans le cas reconstruction pixeliséNx ×Ny
l̄M longueur moyenne de l'arête du maillage
Nx
26 dx 6 2Nx
22 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Segmentation : mise en ÷uvre des levels sets
Cas mono-matériau :
Γ = {x | φ(x) > α} x ∈ R2, α ∈ ]0, 1[
avec α =max{φ(x)}
2
Cas multi-matériaux :
Γ =
r⋃i=1
{x | φ(x) > αi } x ∈ R2, αi ∈ ]0, 1[
les αi sont calculés à partir de l'histogrammede la fonction φ(x)
23 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Génération d'un maillage adapté au contenu de l'image
Initialisation :Maillage/Image
Reconstruction
Segmentation
Générationdu maillage
J(f ) < ε
Estimer f̂
Détection de contours
Réduire la taille de f̂
24 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Génération d'un maillage adapté au contenu de l'image
Contour implicite Génération d'un maillage maillageadapté contraint par les points du
contour (en rouge)Interpolation du contour :
établir le nombre des points optimal, k
distribution uniforme des points sur le périmètre du contour(cas d'un seul contour segmenté)
25 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Génération d'un maillage adapté au contenu de l'image
Dans le cas de plusieurs contours segmentés :
Mise en place d'un critère pour dé�nir le nombre de points
optimal : KCi =LCi
LCmin· k i = {1, . . . ,NC }
nombre de points constant pourchaque contour
nombre de points calculés avec lecritère proposé pour chaque contour
26 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Taille de stokage mémoire
Objet Représentation Type de Taille du Gainde l'image données �chier stokage
Genou1024×1024 pixels binaire 1 8 Mo ×1531135 triangles ASCII 52 Ko
Foret256×256 pixels binaire 524 Ko ×11920 triangles ASCII 44 Ko
Shepp-Logan256×256 pixels binaire 524 Ko ×1.19522 triangles ASCII 472 Ko
1. 64 bits
27 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Résultats : reconstructions 2D
Cas mono- matériau :
I Fantôme numériqued'un genou
I Donnéesexpérimentales d'unforet
Cas multi- matériaux :
I Fantôme numériquedu Shepp-Logan
28 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas mono-matériau : données numériques du genou
Reconstruction d'une coupe 2D du fantôme du genou(maillage initial : 100140 triangles)
360 projec-tions
1135 triangles
36 projec-tions
FBP ATM1129 triangles
29 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas mono-matériau : données numériques du genou
Comparaison des contours obtenus par la méthode dereconstruction ATM à partir de 36 et de 360 projections
-40
-30
-20
-10
0
10
20
30
40
-60 -50 -40 -30 -20 -10 0 10
y
x
360 projections36 projections
30 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas mono-matériau : données expérimentales d'un foretDonnées acquises avec un système d'imagerie de micro-tomographiepar rayons X du CEA LIST : foret de diamètre ∅ = 500µm
Générateur X
Medipix 2
Systèmede rotation
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0 50 100 150 200 250
Niveaudegris
Distance (pixels) sinogramme
distance source-objet 22.5 mmdistance objet-détecteur 127.5 mmtaille du détecteur 14 mm2
pixels détecteur 256×256
31 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas mono-matériau : données expérimentales d'un foret
Reconstruction d'une coupe 2D du foret(maillage initial : 55241 triangles)
360 projec-tions
920 triangles
36 projec-tions
FBP ATM 940 triangles 32 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas mono-matériau : données expérimentales d'un foret
Comparaison des contours obtenus par la méthode dereconstruction ATM à partir de 36 et de 360 projections
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5
y
x
360 projections36 projections
33 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas multi-materiaux : données numériques de Shepp-Logan
Objet : fantôme Shepp-Logan composé de 5 matériauxDonnées : 256 projections calculées de façon analytique
distance source-objet 98 mmdistance objet-détecteur 132 mmtaille du détecteur 14 mm2
pixels détecteur 256×256
34 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas multi-materiaux : données numériques de Shepp-Logan
Reconstruction 2D du fantôme Shepp-Logan à partir de 256projections (maillage initial : 55241 triangles)
FBP ATM 9522 triangles
35 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Cas multi-materiaux : données numériques de Shepp-Logan
Contours obtenus par la méthodeATM
Pro�le horizontal
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
50 100 150 200 250
Niveaudegris
Nombre de pixels
Fantôme numériqueFBP
Méthode proposée
36 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Résumé
temps mesuré temps mesuré
genou objet régulierprojections 360 projections 360
Reconstruction : détecteur 256 détecteur 2562
projection/ triangles 100140 tétraèdres 6538236rétroprojection 2D CPU non-optimisé 3D CPU 3D GPU
∼30 min ∼53 min ∼96 secitération itération
Segmentation image=10242 volume=10243
0.5 sec 500 sec �
Maillage 2D 3D
5 sec � �
37 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Conclusions
Mise en ÷uvre d'une méthode itérative de reconstruction entomographie par rayons X simultanée à la segmentation de l'objetétudié à partir d'une représentation sur une grille adaptée aucontenu de l'image
représentation de l'objet par un maillage adapté au contenud'image
reconstruction �classique� en niveau de gris
volume de l'objet segmenté (pas de post-traitement)
stockage des données reconstruites sous forme de �chier CAO
stockage mémoire peu coûteux
optimisation de l'opérateur de projection 3D sur GPU (gaincompris entre ×40 et ×80)
38 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Perspectives : méthode
Court terme :
Optimisation de la segmentation 3D
Validation complète de la méthode de reconstruction ATM en3D (ensemble des étapes)
Optmisation du transfert mémoire CPU/GPU
Transfert vers CIVA CT (via un plugin de reconstruction)
Long terme :
Mise en ÷uvre de la méthode ATM sur architecturemulti-GPUs
Génération du maillage 3D sur architecture parallèle
39 / 40

Contexte Adaptive Triangular Mesh (ATM) Résultats Parallélisation sur GPU Conclusions/Perspectives
Perspectives : applications
CND
contrôle deconformité
métrologie
reverse engineeringTurbine aéronautique. Ref :
http: // blog. nikonmetrology. com/ tag/ industrial-ct
Médical
suivi de maladieosseuse : gonarthrose
40 / 40