Ajuste de curvas Y Mtodos de resolucin para sistemas de
ecuaciones como: Cramer, Gauss, Gauss Jordn
AJUSTE DE CURVASAjuste de curvas se usa para encontrar una
funcin que responda a una muestra de datos obtenidas de alguna
medicin, sampleo etc.
La aplicacin ms elemental es para dibujar una curva en una
computadora en base a algunos puntos (datos) de manera que se vea
bien.
Otra aplicacin ms interesante es la obtener una funcin que en
base a algunos puntos obtenidos de medicin se pueda estimar otros
puntos que no fueron medidos empricamente.
Para lograr este objetivo se utilizan, entre otros, interpolacin
y aproximacin por el mtodo de mnimos cuadrados; en los mtodos por
interpolacin la funcin pasa exactamente por los puntos observados,
en cambio en el mtodo de aproximacin se busca que una funcin pase
lo mas cercanamente posible por los puntos observados.
Interpolacin polinomial:
Este es un mtodo que dados los puntos x1,x2,..,xn con sus
correspondientes valores f(x1),f(x2),..,f/(xn) obtiene un nico
polinomio que pasa por todos los puntos.
Este mtodo trae aparejados dos problemas uno computacional y
otro matemtico.
Problema computacional: La frmula clsica que se utiliza es la de
interpolacin de Lagrange:
Figura 1
Por ejemplo un polinomio de grado 2 donde p(1) = 3, p(2) = 7 y
p(3) = 13 ; utilizando la frmula de la figura 1, sera el
siguiente:
Figura 2
En la frmula de la figura 2 se ve que cuando x = 1 se anulan el
segundo y tercer trmino, cuando x = 2 se anulan el primero y el
tercero y cuando x = 3 se anulan el primero y el segundo; pudindose
extender este ejemplo hasta N puntos, vemos que para N puntos nos
queda un polinomio de grado N-1.
La frmula expresada en la figura 2 se simplifica y se llega a la
siguiente:
Figura 3
Y es ac donde se ve el problema computacional; para pasar de la
frmula de la figura 2 a la de la figura 3, que es la forma estndar
de expresin del polinomio con sus coeficientes, se necesitan por lo
menos N2 operaciones, dado que la sumatoria tiene N trminos y cada
termino tiene un producto de N factores, y esto para varios puntos
crece muy rpido.
Por el otro lado el problema matemtico viene dado debido a que
al crecer el grado del polinomio siempre logro que el mismo pase
por todos los puntos que le exig, pero a medida que crece el grado
del mismo curva entre los puntos no exigidos tiende a fluctuar,
provocando que no sirva para estimar valores no medidos (el cual es
uno de los principales objetivos).
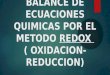
En la siguiente figura se ve un caso tpico; hacemos de cuenta
que conocemos la funcin f a aproximar y la aproximamos con este
mtodo con el polinomio P:
Figura 4
Se ve claramente que en los puntos medidos el polinomio vale
igual que la funcin, pero entre los puntos difiere mucho.
Por estas razones se considera inapropiado el mtodo de
interpolacin de polinomios para hacer un ajuste de curva.
Interpolacin Spline:
Mediante este mtodo se usan polinomios de grado 3 para unir dos
puntos de la funcin entre si, es decir en vez de utilizar un
polinomio de alto grado se usan varios de grado 3 , esto implica
que para N puntos tenemos N-1 polinomios diferentes de grado 3.
Figura 5
Si(x) es el polinomio que une el punto i con el i + 1, es decir
S1(x1) = y1 , S1(x2) = y2 , S2(x2) = y2 (
S1(x2) = S2(x2) ; por otro lado adems de coincidir los
diferentes polinomios en los puntos que los unen pedimos que
coincidan la primer y segunda derivada, de esta forma vamos a
lograr una unin natural entre los puntos, que es hacia lo que
apuntamos.
Teniendo en cuenta que :
Figura 6
y que en un mismo punto coinciden los valores de sus derivadas
primeras y de sus derivadas segundas es decir:
Figura 7
Nos queda un sistema de ecuaciones de 4N-6 ecuaciones con 4(N-1)
= 4N-4 incgnitas, es decir nos faltan 2 condiciones para poder
armar un sistema de ecuaciones con solucin nica.
Una solucin para esto es saber el valor de y de y para un spline
llamado natural estas derivadas valen cero, completando con estas
dos condiciones un sistema de ecuaciones de 4N-4 ecuaciones con
4N-4 incgnitas (que son los coeficientes de los N-1 polinomios de
grado 3 que unen los N puntos).
Este sistema se resuelve aplicando eliminacin de Gauss.
Existe una forma de calcular ms eficientemente estas curvas;
supongamos que conocemos los valores de Si(xi) y los llamamos pi ,
podemos expresar el valor de los coeficientes de cada curva en
funcin de esos pi utilizando el siguiente sistema de
ecuaciones:
Figura 8
Una vez resuelto esto el problema se reduce a N-2 pi incgnitas,
que se resuelven con las N-2 ecuaciones
que salen de que
Figura 9
Haciendo un cambio de variables
Figura 10
nos queda la siguiente ecuacin de la curva Si(t) entre el punto
xi y xi+1 en funcin de pi y pi+1
Figura 11
en la ecuacin anterior cuando x = xi ( t = 0 y cuando x = xi+1 (
t = 1por lo tanto quedando Si-1(1) = Si(0) para i = 2, . . . , N-1
y llamando
Figura 12
Nos queda la siguiente ecuacin, completando el sistema de
ecuaciones para averiguar pi
Figura 13
Finalmente llamando
Figura 14
Y para un caso en que N = 7 nos queda el siguiente sistema de
ecuaciones
Figura 15
El sistema de ecuaciones anterior se resuelve de la siguiente
manera dado que es una matriz tridiagonal y adems simtrica con
respecto a la diagonal.
Usamos el siguiente mtodo:
Figura 16
Y una vez obtenidos los valores pi se los utiliza en el
siguiente mtodo que devuelve el valor de la funcin interpolante
para un x dado:
Figura17
El mtodo anterior primero ubica en que intervalo [xi,xi+1] se
encuentra la x ingresada y luego hace todos los clculos con esa
curva interpolante.
DEFINICIN Y CLASIFICACIN DE ECUACIONES LINEALES
Se denomina ecuacin lineal a aquella que tiene la forma de un
polinomio de primer grado, es decir, las incgnitas no estn elevadas
a potencias, ni multiplicadas entre s, ni en el denominador.Por
ejemplo, 3x + 2y + 6z = 6 es una ecuacin lineal con tres incgnitas.
Como es bien sabido, las ecuaciones lineales con 2 incgnitas
representan una recta en el plano.
Si la ecuacin lineal tiene 3 incgnitas, su representacin grfica
es un plano en el espacio.
Un ejemplo de ambas representaciones puede observarse en la
figura:
Representacin grfica de la recta x + 2y = 3 en el plano y del
plano x + y + z = 1 en el espacio
UN SISTEMA DE ECUACIONES LINEALES ES UN CONJUNTO DE ECUACIONES
LINEALES DE LA FORMA:
En este caso tenemos m ecuaciones y n incgnitas.
Los nmeros reales aij se denominan coeficientes y los se
denominan incgnitas (o nmeros a determinar) y bj se denominan
trminos independientes.
En el caso de que las incgnitas sean 2 se suelen designar
simplemente por x e y en vez de x1 y x2, y en el caso de tres, x,
y, z en lugar de x1, x2 y x3 pero esto es indiferente a la hora de
resolver el sistema.
Resolver el sistema consiste en calcular las incgnitas para que
se cumplan TODAS las ecuaciones del sistema simultneamente.
Diremos que dos sistemas son equivalentes cuando tienen las
mismas soluciones.REPRESENTACIN MATRICIAL DE UN SISTEMA DE
ECUACIONESCualquier sistema de ecuaciones lineales se puede
expresar en forma matricial del modo:
La matriz formada por A y B conjuntamente, es decir:
se llama matriz ampliada del sistema y se representara por
(A|B)SISTEMAS EQUIVALENTES
11-1
2-11
1-3-1
-1-31
X
Y
Z
2
1
0
0
=
Los sistemas equivalentes, se aplican a sistemas de ecuaciones
lineales que tienen las mismas soluciones y que resultan de aplicar
sobre la matriz original operaciones elementales de fila
11-12
2-111
1-3-10
-1-310
CLASIFICACION DE SISTEMAS DE ECUACIONES
Sistemas homogneos (2 tipos de soluciones)
La solucin trivial, es decir, cuando las incgnitas valen cero
cada una.
Infinitas soluciones, cuando algunas de las incgnitas quedan en
funcin de otras y valen cero.
Sistemas no homogneos (3 tipos de soluciones)
nica solucin, cuando para todas las incgnitas del sistema existe
con un solo valor real.
Infinitas soluciones, cuando algunas de las incgnitas estn en
funcin de otras y tienen un valor real.
No existe solucin, cuando los valores de las incgnitas no
existen.
En sistemaNo homogneoHomogneo
a)SiSi (Trivial)
b)SiSi
c)SiNo
MTODOS DE RESOLUCIN Mtodo de Gauss
El mtodo de Gauss, conocido tambin como de triangulacin o de
cascada, nos permite resolver sistemas de ecuaciones lineales con
cualquier nmero de ecuaciones y de incgnitas.
La idea es muy simple; por ejemplo, para el caso de un sistema
de tres ecuaciones con tres incgnitas se trata de obtener un
sistema equivalente cuya primera ecuacin tenga tres incgnitas, la
segunda dos y la tercera una. Se obtiene as unsistema triangularo
en cascada de la forma:
Ax+ By+ Cz= D Ey+ Fz= G Hz= I
Ejemplo:
Realizamos operaciones de fila
La ultima matriz esta en forma escalonada por filas, (mtodo de
gauss), lo cual significa que:
.
Mtodo de Gauss-Jordan
Este mtodo, que constituye una variacin del mtodo de eliminacin
de Gauss, permite resolver hasta 15 o 20 ecuaciones simultneas, con
8 o 10 dgitos significativos en las operaciones aritmticas de la
computadora. Este procedimiento se distingue del mtodo Gaussiano en
que cuando se elimina una incgnita, se elimina de todas las
ecuaciones restantes, es decir, las que preceden a la ecuacin
pivote as como de las que la siguen.
El mtodo se ilustra mejor con un ejemplo. Resolvamos el
siguiente conjunto de ecuaciones
3.0 X1 - 0.1 X2 - 0.2 X3 = 7.8500
0.1 X1 + 7.0 X2 - 0.3 X3 = - 19.3
0.3 X1 - 0.2 X2 + 10 X3 = 71.4000
Primero expresemos los coeficientes y el vector de trminos
independientes como una matriz aumentada.
Se normaliza el primer rengln dividiendo entre 3 para
obtener:
El trmino X1 se puede eliminar del segundo rengln restando 0.1
veces el primero del segundo rengln. De una manera similar,
restando 0.3 veces el primero del tercer rengln se elimina el
trmino con X1 del tercer rengln.
En seguida, se normaliza el segundo rengln dividiendo entre
7.00333:
Reduciendo los trminos en X2 de la primera y la tercera ecuacin
se obtiene:
El tercer rengln se normaliza dividiendolo entre 10.010:
Finalmente, los trminos con X3 se pueden reducir de la primera y
segunda ecuacin para obtener:
Ntese que no se necesita sustitucin hacia atrs para obtener la
solucin.
Las ventajas y desventajas de la eliminacin gaussiana se aplican
tambin al mtodo de Gauss-Jordan.
Aunque los mtodos de Gauss-Jordan y de eliminacin de Gauss
pueden parecer casi idnticos, el primero requiere aproximadamente
50% menos operaciones. Por lo tanto, la eliminacin gaussiana es el
m todo simple por excelencia en la obtencin de soluciones exactas a
las ecuaciones lineales simultneas. Una de las principales razones
para incluir el mtodo de Gauss-Jordan, es la de proporcionar un
mtodo directo para obtener la matriz inversa. Mtodo de Cramer
Laregla de Cramersirve para resolver sistemas de ecuaciones
lineales. Se aplica a sistemas que cumplan las dos condiciones
siguientes:
-Elnmero de ecuacioneses igual alnmero de incgnitas.
-Eldeterminantede la matriz de los coeficientes esdistinto de
cero.
Talessistemasse denominansistemas de Cramer.
Seael determinante de la matriz de coeficientes.
Y sean: 1, 2, 3... , nLos determinantes que se obtiene al
sustituir los coeficientes del 2 miembro (los trminos
independientes) en la 1 columna, en la 2 columna, en la 3 columna y
en la ensima columna respectivamente.Unsistema de
Cramertieneunasolasolucinque viene dada por las siguientes
expresiones:
CRITERIO PARA HALLAR SOLUCIONES
Una vez aplicado Gauss o Gauss-Jordn
Tiene solucin nica si el nmero de ecuaciones validas es igual al
nmero de incgnitas.
Tiene infinitas soluciones si el nmero de ecuaciones validas es
menor al nmero de incgnitas.
No tiene solucin si el nmero de filas no nulas de la matriz
ampliada y el de la matriz de coeficientes son diferentes.
Aplicamos Gauss Jordn
Como se escriben las infinitas soluciones
Ejemplo:
Resolucin por Gauss- Jordan
Ejercicios tipo examen:
Determinar para que valores de existe:
a) b) c)
Determinar los valores de a para que el sistema
a) Tenga solucin nica. Hallarlas
b) Tenga ms de una solucin. Hallarlas
c) No tenga soluciones
+2+22
C.S.= C.S.=Determinar los valores de m para que el siguiente
sistema
a) Tenga solucin nica. Hallarlas
b) Tenga ms de una solucin. Hallarlas
c) No tenga soluciones
C.S.= C.S.=
C.S.= C.S.=
SEMESTRE: 5 B
2015
Ajuste de curvas Y Mtodos de resolucin para sistemas de
ecuaciones como: Cramer, Gauss, Gauss Jordn
Mtodos numricos
Vanessa Alexandra vila Domnguez
UNIVERSIDAD NACIONAL DE CHIMBORAZO
FACULTAD DE INGENIERA
INGENIERA CIVIL
_1118068686.doc
_1118065909.bin