Embed Size (px)
Citation preview
MÉTODO DE SISTEMATIZAÇÃO E LEVANTAMENTO DE
DADOS PARA O ESTUDO DA RELAÇÃO DE ACIDENTES COM O ALINHAMENTO EM PLANTA E PERFIL DE UMA RODOVIA CYNTHIA PERPÉTUA LOTTI
Tese apresentada à Escola de Engenharia de São Carlos da Universidade de São Paulo, como parte dos requisitos para obtenção do Título de Doutor em Transportes. ORIENTADOR: Prof. Dr. João Alexandre Widmer CO-ORIENTADOR: Prof. Dr. Ricardo E. Schaal
São Carlos 2002
Lotti, Cynthia Perpétua L884m Método de sistematização e levantamento de dados
para o estudo da relação de acidentes com o alinhamento em planta e perfil de uma rodovia / Cynthia Perpétua Lotti. –- São Carlos, 2002.
Tese (Doutorado) –- Escola de Engenharia de São
Carlos-Universidade de São Paulo, 2002. Área: Transportes. Orientador: Prof. Dr. João Alexandre Widmer. Co-orientador : Prof. Dr. Ricardo Ernesto Schaal. 1. Rodovia. 2. Acidentes. 3. Geometria. 4. SIG. 5.
GPS. 6. Banco de dados. I. Título.
SUMÁRIO
VOLUME I
LISTA DE FIGURAS i LISTA DE TABELAS x LISTA DE ABREVIATURAS E SIGLAS xiv RESUMO xvi ABSTRACT xvii
1 INTRODUÇÃO 1
1.1 OBJETIVO 6
1.2 JUSTIFICATIVA 6
1.3 ORGANIZAÇÃO DO TRABALHO 7
2 BANCOS DE DADOS EXISTENTES E ESTUDOS SOBRE A
RELAÇÃO ENTRE AS CARACTERÍSTICAS OPERACIONAIS E OS
ACIDENTES 9
3 FORMATAÇÃO E INTEGRAÇÃO DOS DADOS EM UM SIG 36
3.1 INFORMAÇÕES DOS ACIDENTES 37
3.2 DADOS DA GEOMETRIA 39
3.3 DADOS DOS OUTROS ATRIBUTOS 40
3.4 DADOS DO TRÁFEGO 42
3.5 INCORPORAÇÃO DAS INFORMAÇÕES À BASE GEOGRÁFICA 46
3.6 DADOS CONSIDERADOS NO DESENVOLVIMENTO
DA PESQUISA 51
4 INFORMAÇÕES DOS ACIDENTES EM UMA RODOVIA 55
5 MÉTODOS PARA LEVANTAR A GEOMETRIA DE
UMA RODOVIA 61
5.1 MÉTODOS ANALISADOS 63
5.1.1 ESTAÇÃO TOTAL 64 5.1.2 FOTOGRAMETRIA E SENSORIAMENTO REMOTO 65 5.1.3 GPS 70 5.1.4 INS 71 5.1.5 GPS/INS 76 5.1.6 VEÍCULOS ESPECIAIS PARA COLETA DE DADOS 80
5.2 INFORMAÇÕES COLETATAS SOBRE GEOMETRIA
DA RODOVIA 87
5.3 MÉTODO ADOTADO 89
6 SEPARAÇÃO DOS ELEMENTOS GEOMÉTRICOS DE
UMA RODOVIA 91
6.1 MÉTODO PROPOSTO POR MARTELL (1990) 91
6.2 MÉTODO PROPOSTO POR BREZINSKA (1996) 92
6.3 MÉTODO PROPOSTO POR DAWOUD ET AL (1997) 94
6.4 MÉTODO PROPOSTO POR EASA ET AL (1998) 94
6.5 MÉTODO PROPOSTO POR DRAKOPOULOS & ÖRNEK (2000) 102
6.6 PROGRAMA CPV DA EESC-USP 104
6.7 RESUMO DOS MÉTODOS ENCONTRADOS 108
7 MÉTODO PROPOSTO PARA SEPARAÇÃO DOS ELEMENTOS
GEOMÉTRICOS DE RODOVIAS 109
7.1 FLUXOGRAMA GERAL 133
7.2 ALGORITMO DO MÉTODO DECLIVIDADE I 138
7.3 ALGORITMO DO MÉTODO DECLIVIDADE II 141
7.4 TESTES COM DADOS SIMULADOS 143
7.5 TESTES COM DADOS DO PROJETO EXECUTIVO DE
UMA RODOVIA 147
8 LEVANTAMENTOS DE DADOS DE CAMPO 155
8.1 LEVANTAMENTO DA SP-127- RODOVIA FAUSTO
SANTO MAURO 156
8.1.1 LEVANTAMENTO REALIZADO EM 1997 156 8.1.2 LEVANTAMENTO REALIZADO EM 21 DE MAIO DE 2000 159 8.1.3 LEVANTAMENTOS REALIZADOS EM OUTUBRO E NOVEMBRO
DE 2000 161 8.1.4 LEVANTAMENTO REALIZADO EM MAIO DE 2001 PARA INCORPORAR
DADOS DAS CARACTERÍSTICAS COMPLEMENTARES 162 8.1.5 LEVANTAMENTO COM ESTAÇÃO TOTAL 162
SUMÁRIO
VOLUME II
9 VALIDAÇÃO COM DADOS DE CAMPO 163
9.1 COMPARAÇÃO DO MÉTODO PROPOSTO UTILIZANDO OS DADOS
DA ESTAÇÃO TOTAL COM O PROJETO EXECUTIVO DA SP-127-
TRECHO DE 3 KM- SENTIDO RIO CLARO-PIRACICABA 164
9.2 COMPARAÇÃO ENTRE O GPS E A ESTAÇÃO TOTAL 174
9.3 COMPARAÇÃO DOS DADOS GPS COM OS DADOS DO PROJETO
GEOMÉTRICO EM UM TRECHO DE 18 KM 181
9.4 DETERMINAÇÃO DO PERFIL DA RODOVIA NO SENTIDO
RIO CLARO-PIRACICABA- TRECHO TOTAL 198
9.4 DETERMINAÇÃO DA PLANTA NO SENTIDO
RIO CLARO-PIRACICABA 204
10 APLICAÇÃO DO MÉTODO NA ANÁLISE DE ACIDENTES 219
10.1 DESCRIÇÃO DOS ELEMENTOS EM PLANTA 219
10.2 DESCRIÇÃO DOS ELEMENTOS EM PERFIL 221
10.3 DESCRIÇÃO DAS CARACTERÍSTICAS GEOMÉTRICAS
RELEVANTES NO TRANSCAD 221
10.4 APLICAÇÃO À ANÁLISE DE ACIDENTES 226
11 CONCLUSÕES E RECOMENDAÇÕES 241
ANEXO A 245
ANEXO B 249
ANEXO C 252
ANEXO D 257
ANEXO E 262
BIBLIOGRAFIA REFERENCIADA 267
BIBLIOGRAFIA CONSULTADA 275
APÊNDICE I 288
APÊNDICE I I 293
9 VALIDAÇÃO COM OS DADOS DE CAMPO
O método de separação foi amplamente testado com um conjunto de curvas
padronizadas e o projeto executivo da SP-127. O segundo passo foi avaliar o
comportamento do método com dados de campo.
Primeiramente, analisaram-se os resultados do método de separação com um
levantamento de 3 km com Estação Total e os dados do projeto executivo. O objetivo
foi avaliar o desempenho do método de separação com um processo de coleta de
dados mais preciso que o GPS. Em seguida, neste trecho de 3 km, foram comparados
os dados do GPS cinemático com os dados da Estação total e com o projeto .
Depois, o método foi aplicado aos dados obtidos com o método de
levantamento utilizando o sistema GPS cinemático adotado nesta tese para
determinação do as-built da rodovia. Conforme visto no capítulo 8, foram realizados
dois levantamentos no sentido Rio Claro – Piracicaba com espaçamento dos dados de
10 e 20 m. Os dados em perfil e planta foram determinados através do método
proposto e depois foram comparados com os dados do projeto em perfil e planta.

164
9.1 Comparação do Método Proposto Utilizando os dados da Estação Total
com o Projeto Executivo da SP-127- Trecho de 3 km- Sentido Rio Claro-
Piracicaba
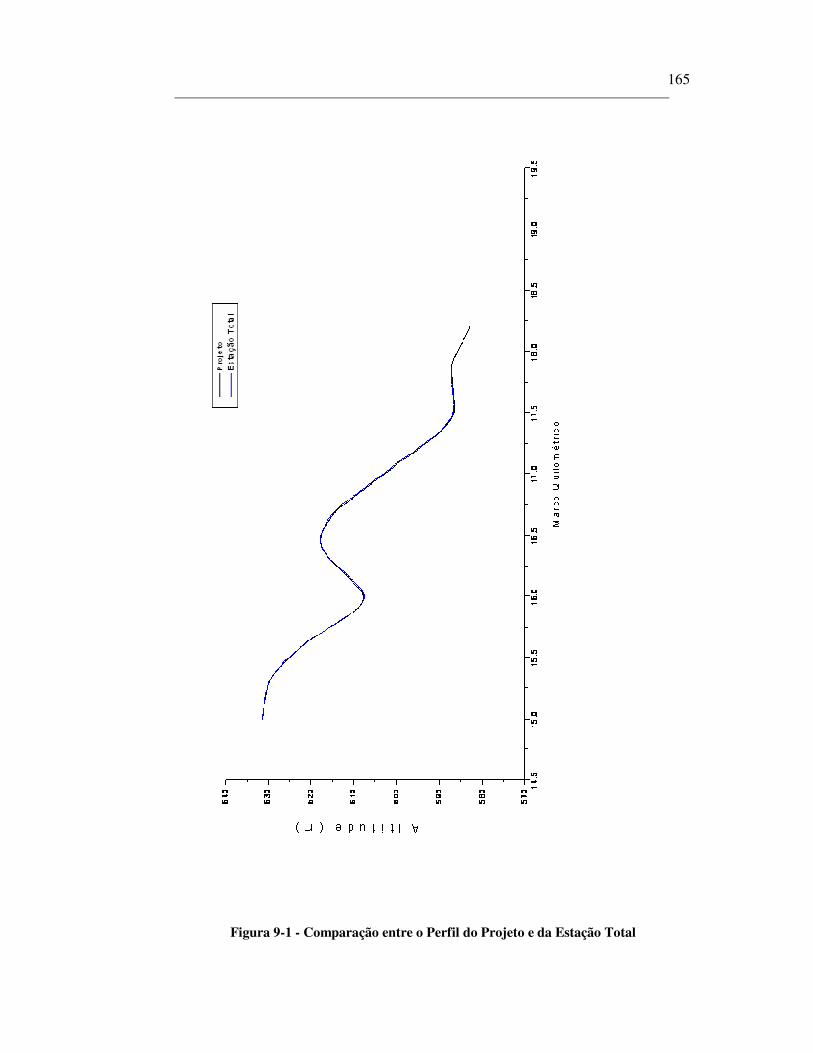
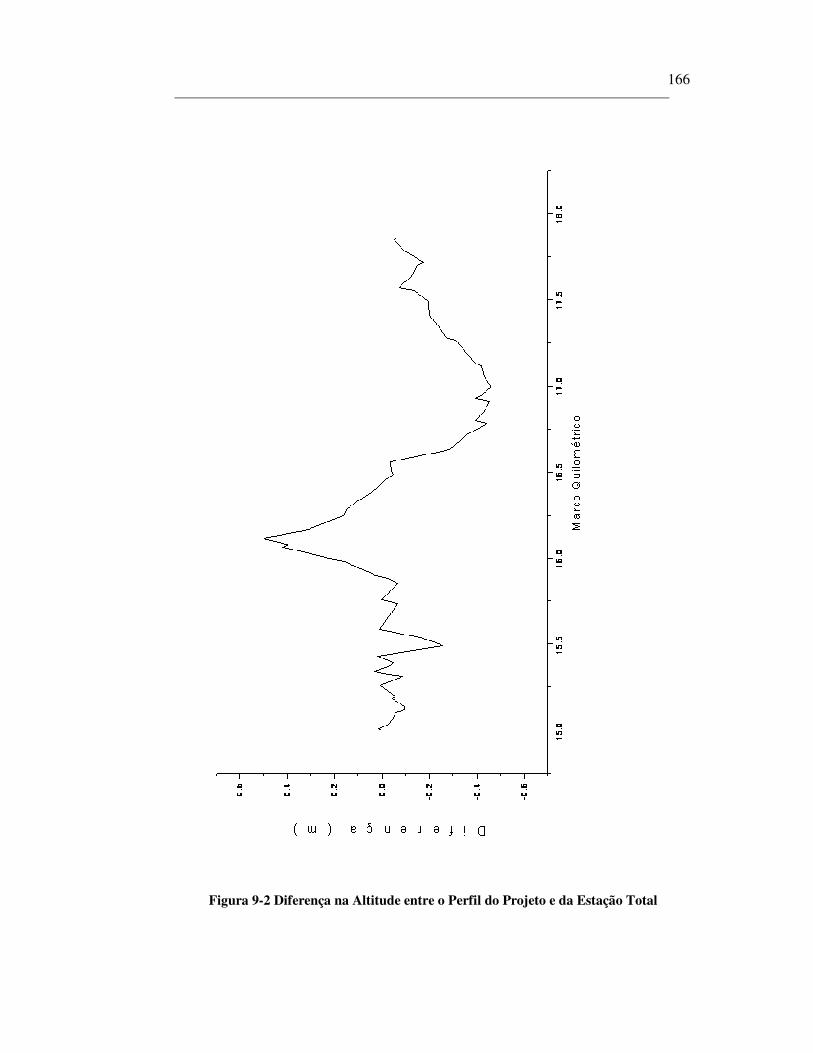
Foi verificado se os dados do projeto conferiam com os dados do as-built
obtido pela Estação Total (Figura 9-1). A diferença entre o as-built e o projeto não
ultrapassou 0.50 m e a média das diferenças é igual a 0.16 m, ou seja, neste trecho, o
que foi projetado foi executado (Figura 9-2). O eixo de coordenadas original do
projeto teve que ser transladado para que os dados pudessem ser comparados com os
dados da Estação Total.
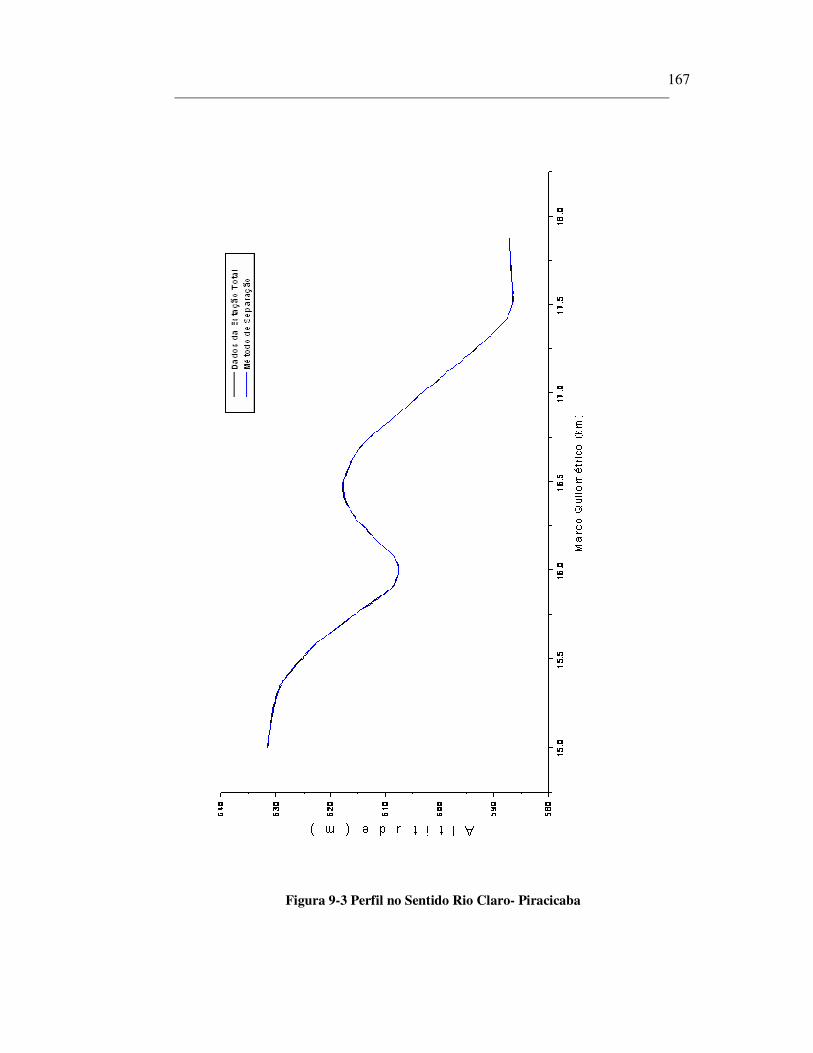
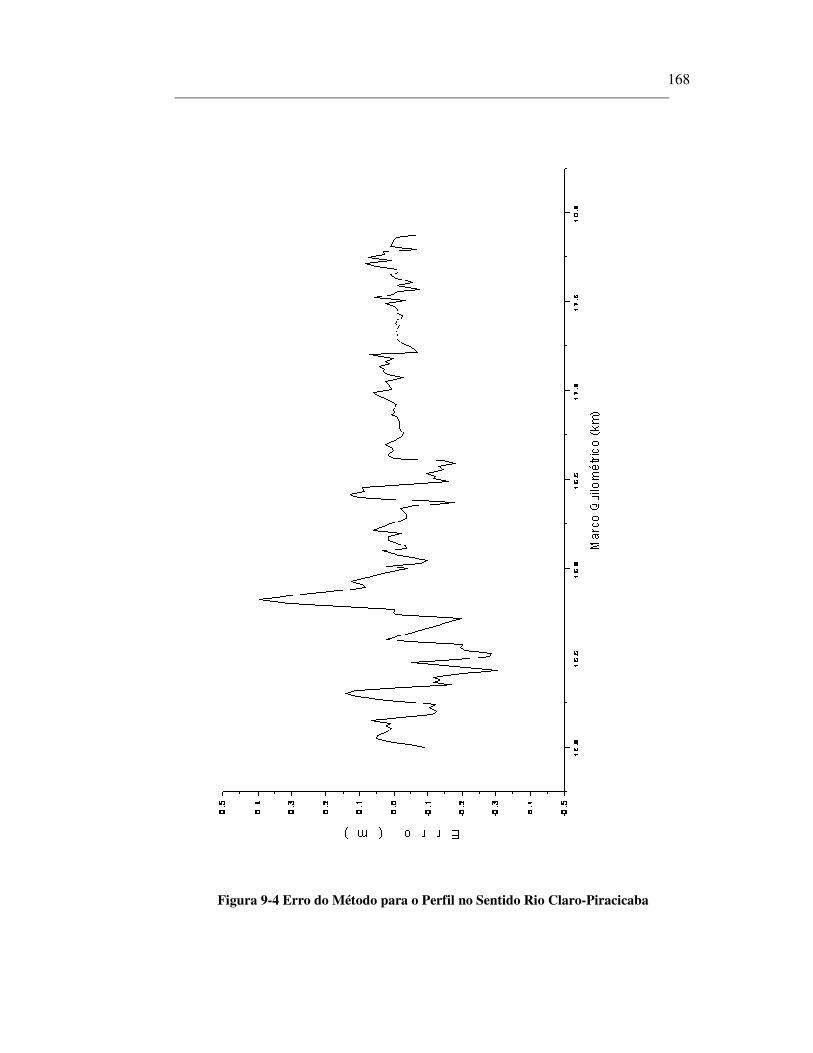
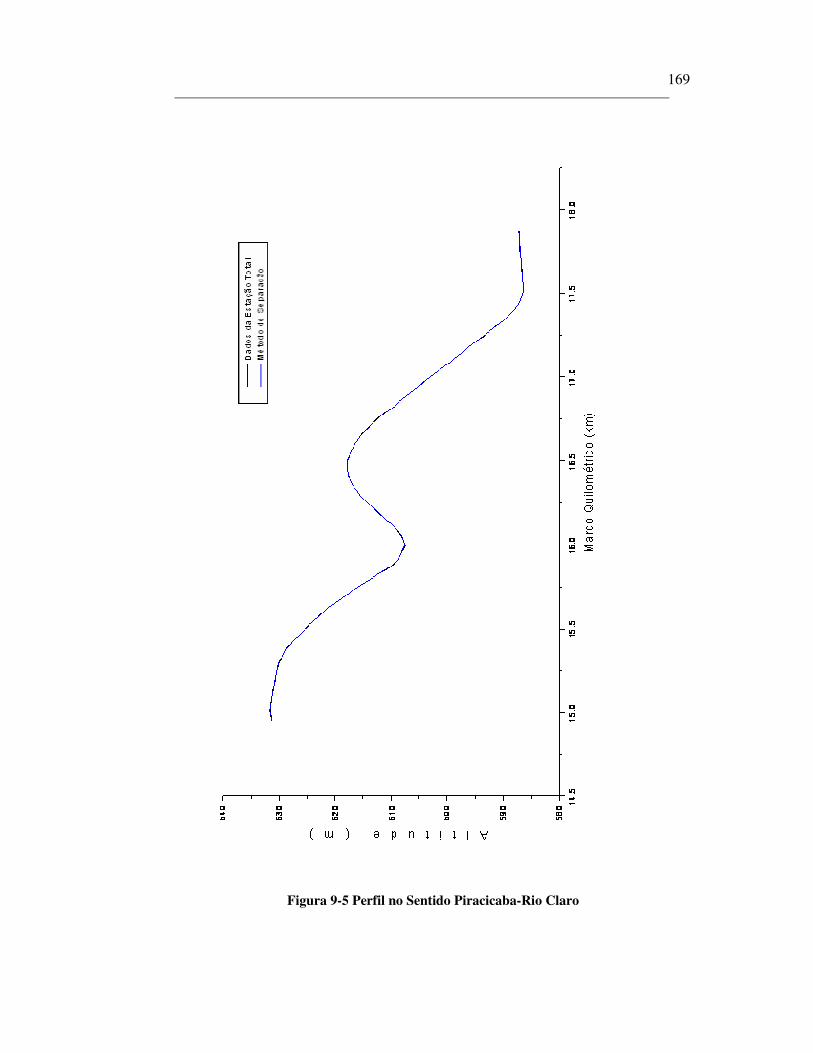
Os dados foram processados e os resultados são apresentados nas tabelas e
figuras apresentadas a seguir. Na Figura 9-3, são apresentados o perfil obtido pela
Estação Total e o perfil determinado pelo método no sentido Rio Claro- Piracicaba e
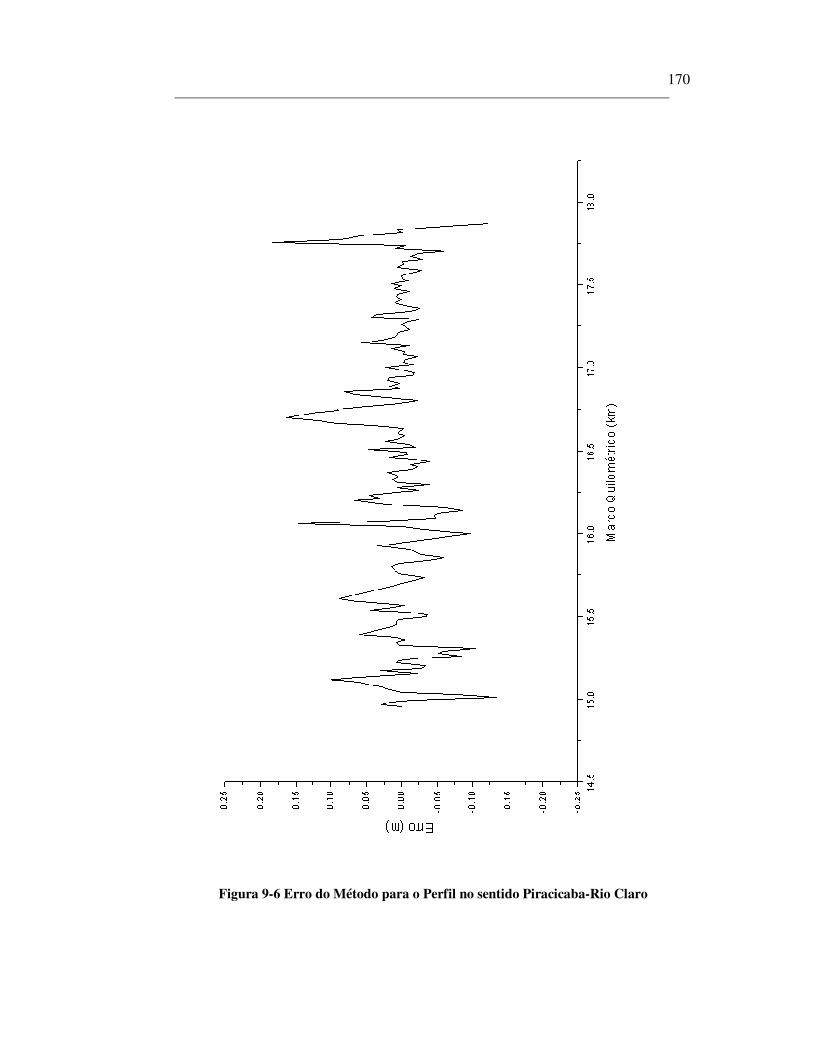
na Figura 9-5 no sentido Piracicaba – Rio Claro. A diferença na altitude entre os dois
perfis não ultrapassou os 0.4 m (Figura 9-4) no sentido Rio Claro- Piracicaba e 0.2 m
no sentido Piracicaba – Rio Claro (Figura 9-6) .
165
Figura 9-1 - Comparação entre o Perfil do Projeto e da Estação Total
166
Figura 9-2 Diferença na Altitude entre o Perfil do Projeto e da Estação Total
167
Figura 9-3 Perfil no Sentido Rio Claro- Piracicaba
168
Figura 9-4 Erro do Método para o Perfil no Sentido Rio Claro-Piracicaba
169
Figura 9-5 Perfil no Sentido Piracicaba-Rio Claro
170
Figura 9-6 Erro do Método para o Perfil no sentido Piracicaba-Rio Claro
Piracicaba-Rio Claro
171
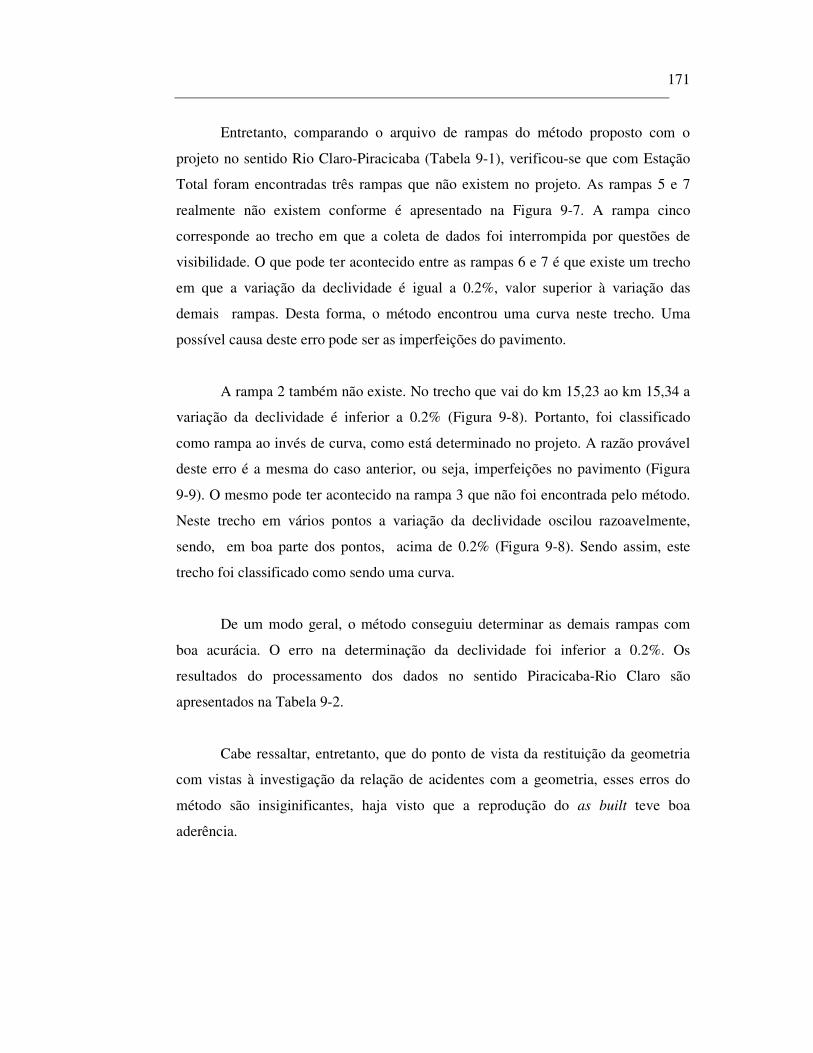
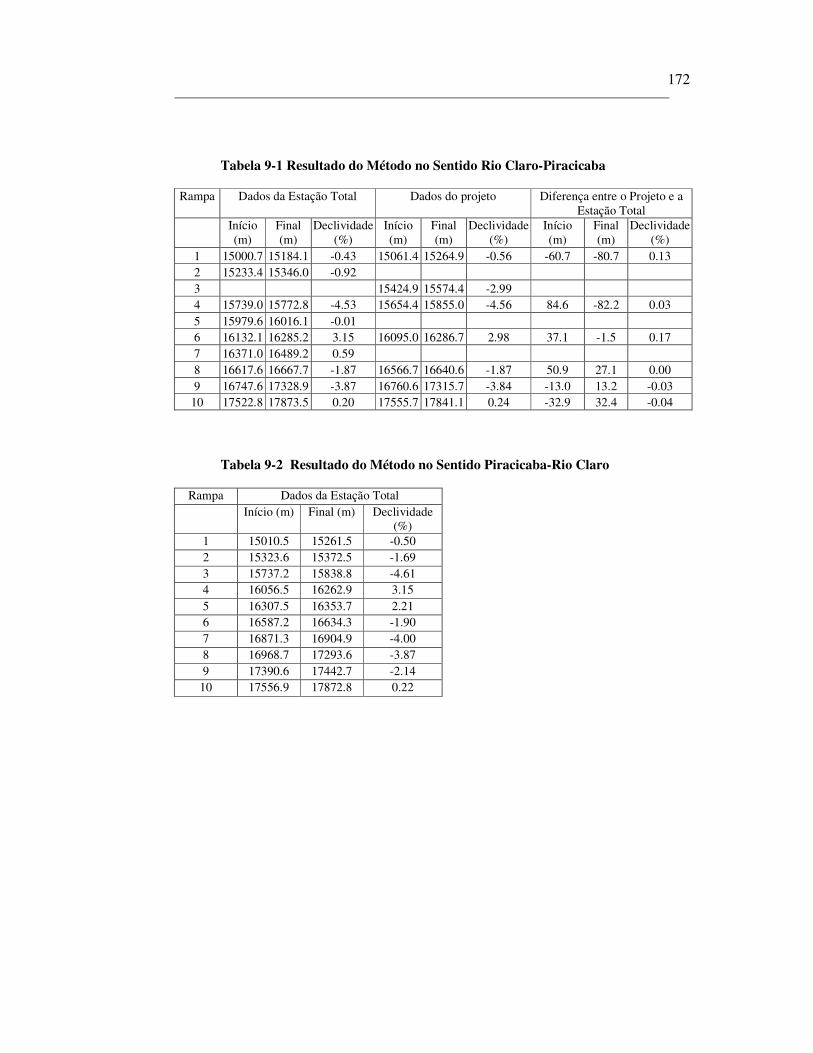
Entretanto, comparando o arquivo de rampas do método proposto com o
projeto no sentido Rio Claro-Piracicaba (Tabela 9-1), verificou-se que com Estação
Total foram encontradas três rampas que não existem no projeto. As rampas 5 e 7
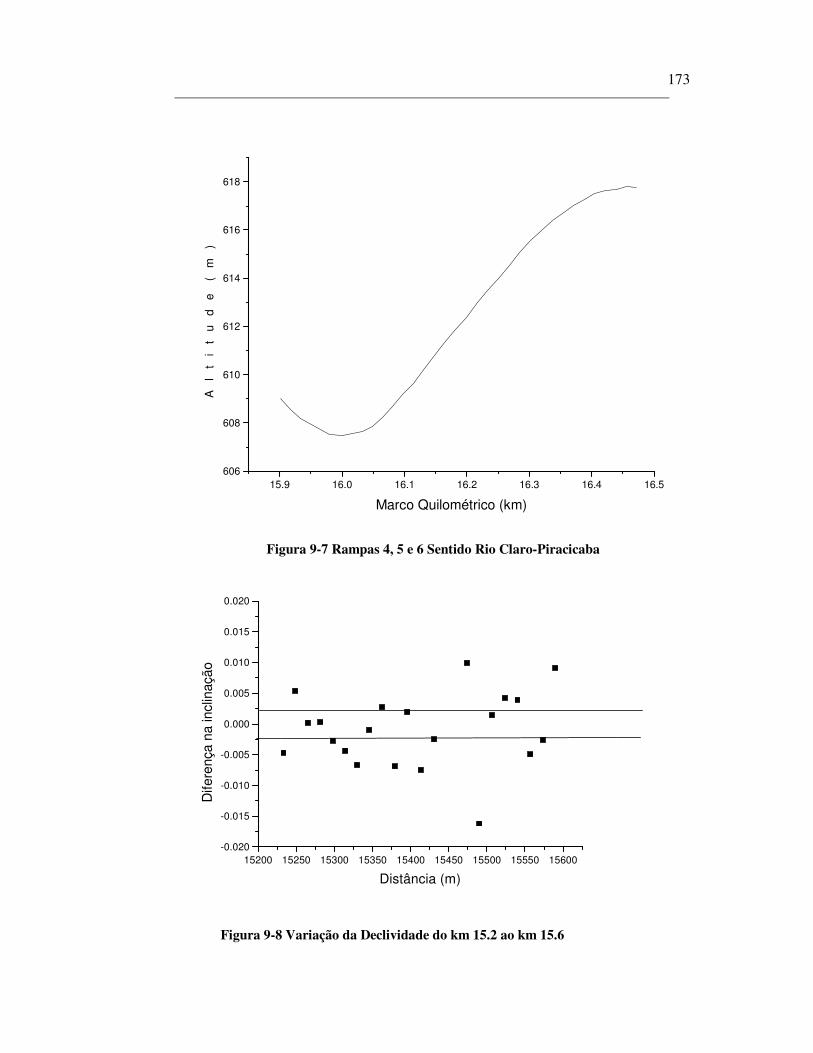
realmente não existem conforme é apresentado na Figura 9-7. A rampa cinco
corresponde ao trecho em que a coleta de dados foi interrompida por questões de
visibilidade. O que pode ter acontecido entre as rampas 6 e 7 é que existe um trecho
em que a variação da declividade é igual a 0.2%, valor superior à variação das
demais rampas. Desta forma, o método encontrou uma curva neste trecho. Uma
possível causa deste erro pode ser as imperfeições do pavimento.
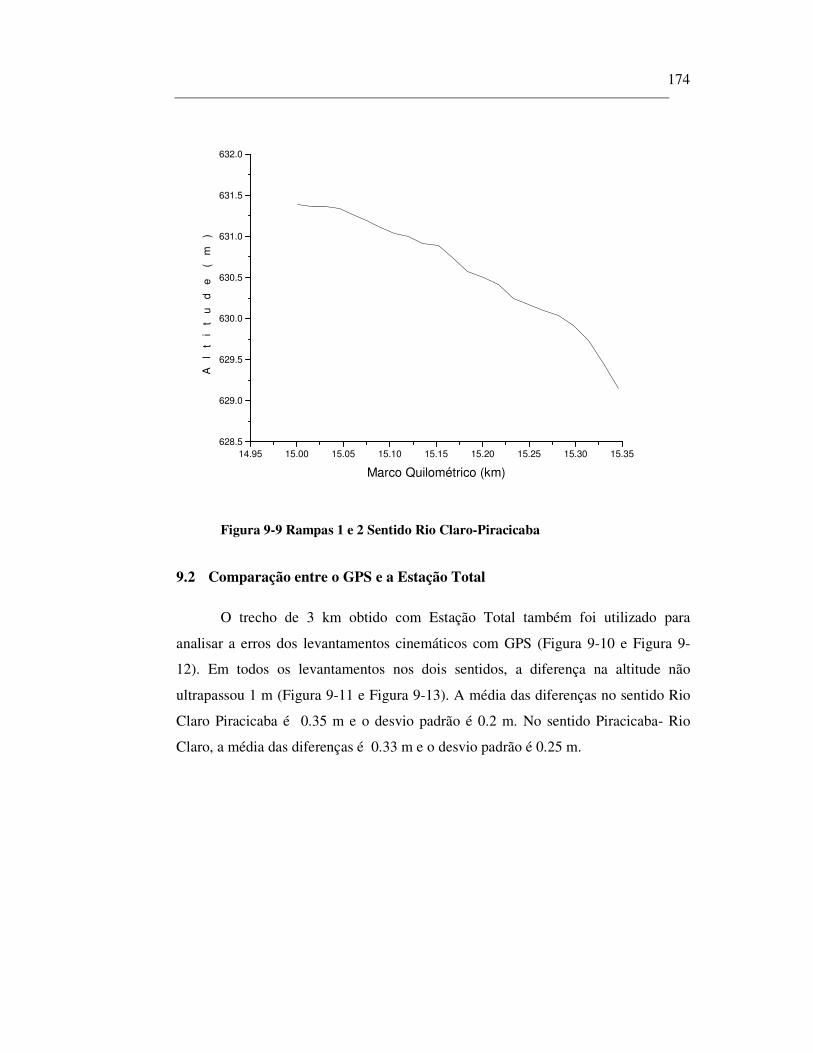
A rampa 2 também não existe. No trecho que vai do km 15,23 ao km 15,34 a
variação da declividade é inferior a 0.2% (Figura 9-8). Portanto, foi classificado
como rampa ao invés de curva, como está determinado no projeto. A razão provável
deste erro é a mesma do caso anterior, ou seja, imperfeições no pavimento (Figura
9-9). O mesmo pode ter acontecido na rampa 3 que não foi encontrada pelo método.
Neste trecho em vários pontos a variação da declividade oscilou razoavelmente,
sendo, em boa parte dos pontos, acima de 0.2% (Figura 9-8). Sendo assim, este
trecho foi classificado como sendo uma curva.
De um modo geral, o método conseguiu determinar as demais rampas com
boa acurácia. O erro na determinação da declividade foi inferior a 0.2%. Os
resultados do processamento dos dados no sentido Piracicaba-Rio Claro são
apresentados na Tabela 9-2.
Cabe ressaltar, entretanto, que do ponto de vista da restituição da geometria
com vistas à investigação da relação de acidentes com a geometria, esses erros do
método são insiginificantes, haja visto que a reprodução do as built teve boa
aderência.
172
Tabela 9-1 Resultado do Método no Sentido Rio Claro-Piracicaba
Rampa Dados da Estação Total Dados do projeto Diferença entre o Projeto e a Estação Total
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
1 15000.7 15184.1 -0.43 15061.4 15264.9 -0.56 -60.7 -80.7 0.13 2 15233.4 15346.0 -0.92 3 15424.9 15574.4 -2.99 4 15739.0 15772.8 -4.53 15654.4 15855.0 -4.56 84.6 -82.2 0.03 5 15979.6 16016.1 -0.01 6 16132.1 16285.2 3.15 16095.0 16286.7 2.98 37.1 -1.5 0.17 7 16371.0 16489.2 0.59 8 16617.6 16667.7 -1.87 16566.7 16640.6 -1.87 50.9 27.1 0.00 9 16747.6 17328.9 -3.87 16760.6 17315.7 -3.84 -13.0 13.2 -0.03
10 17522.8 17873.5 0.20 17555.7 17841.1 0.24 -32.9 32.4 -0.04
Tabela 9-2 Resultado do Método no Sentido Piracicaba-Rio Claro
Rampa Dados da Estação Total Início (m) Final (m) Declividade
(%) 1 15010.5 15261.5 -0.50 2 15323.6 15372.5 -1.69 3 15737.2 15838.8 -4.61 4 16056.5 16262.9 3.15 5 16307.5 16353.7 2.21 6 16587.2 16634.3 -1.90 7 16871.3 16904.9 -4.00 8 16968.7 17293.6 -3.87 9 17390.6 17442.7 -2.14
10 17556.9 17872.8 0.22
173
15.9 16.0 16.1 16.2 16.3 16.4 16.5606
608
610
612
614
616
618
A
l t
i
t u
d
e
(
m
)
Marco Quilométrico (km)
Figura 9-7 Rampas 4, 5 e 6 Sentido Rio Claro-Piracicaba
15200 15250 15300 15350 15400 15450 15500 15550 15600-0.020
-0.015
-0.010
-0.005
0.000
0.005
0.010
0.015
0.020
Dife
renç
a na
incl
inaç
ão
Distância (m)
Figura 9-8 Variação da Declividade do km 15.2 ao km 15.6
174
14.95 15.00 15.05 15.10 15.15 15.20 15.25 15.30 15.35628.5
629.0
629.5
630.0
630.5
631.0
631.5
632.0
A
l t
i
t u
d
e
(
m
)
Marco Quilométrico (km)
Figura 9-9 Rampas 1 e 2 Sentido Rio Claro-Piracicaba
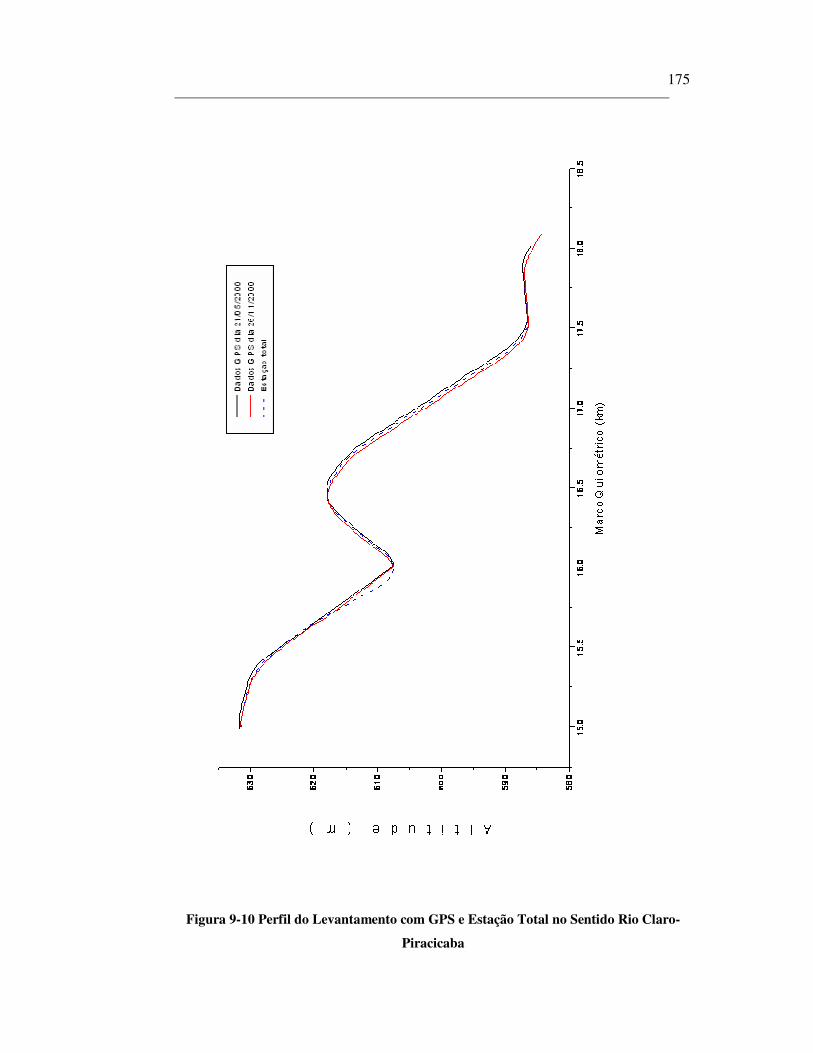
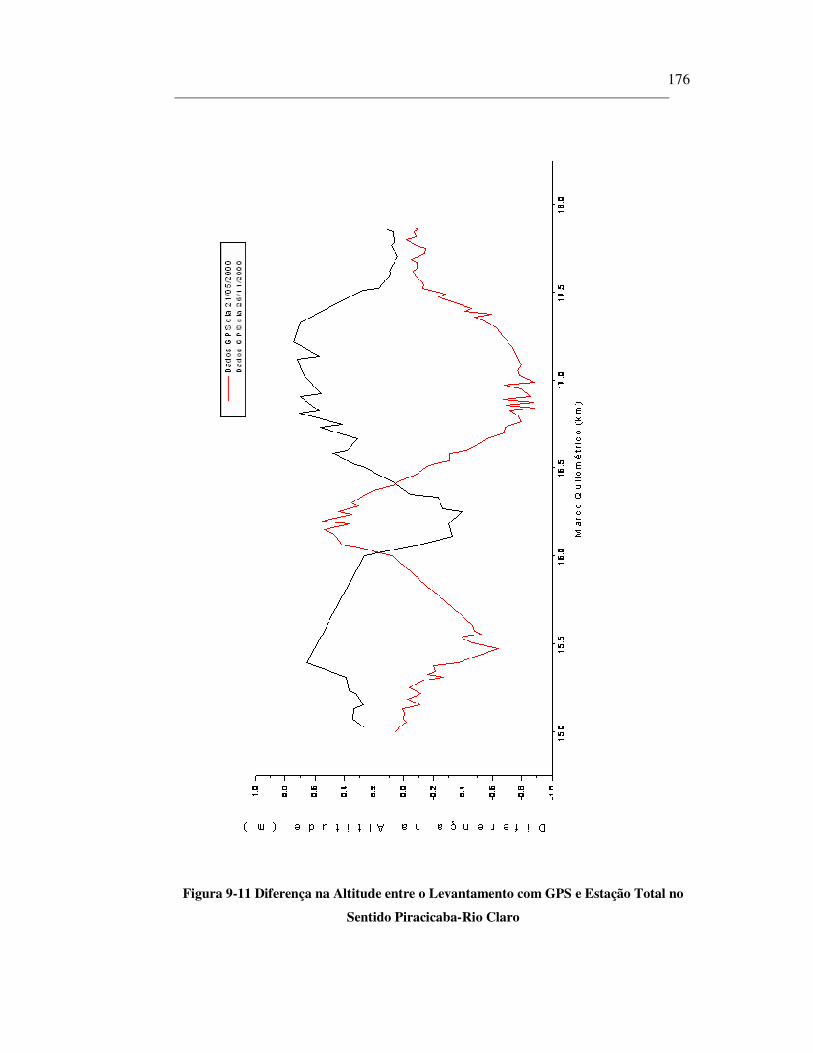
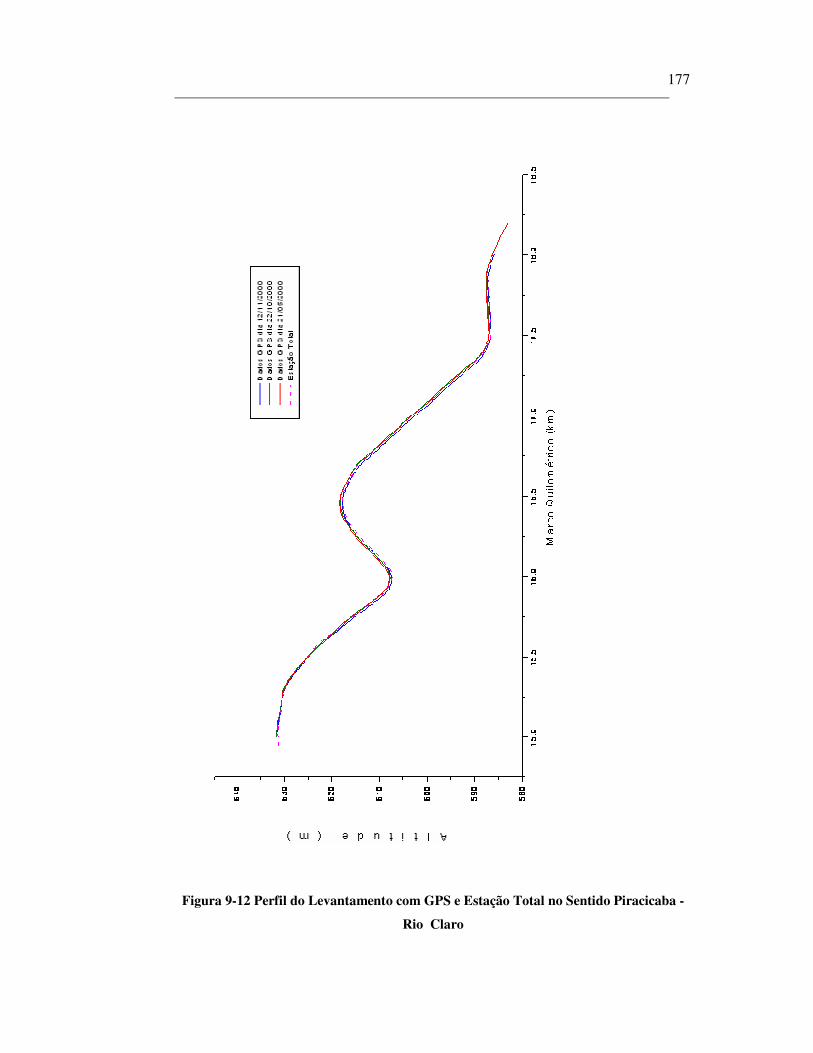
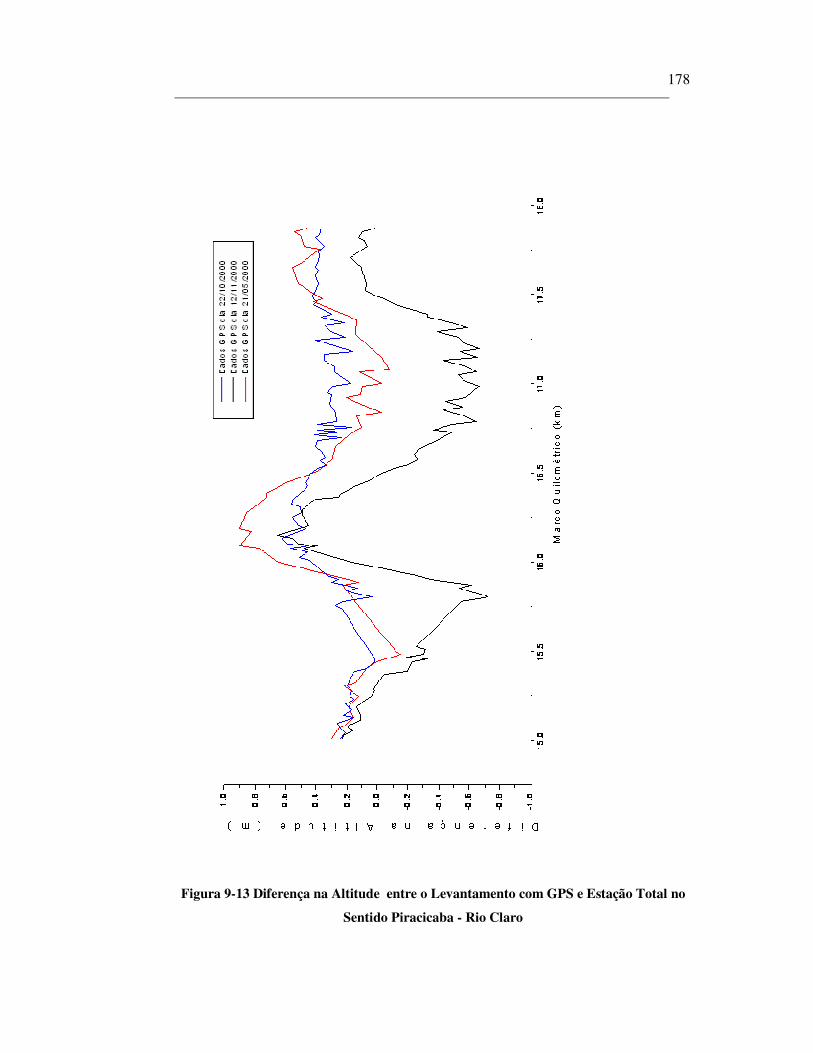
9.2 Comparação entre o GPS e a Estação Total
O trecho de 3 km obtido com Estação Total também foi utilizado para
analisar a erros dos levantamentos cinemáticos com GPS (Figura 9-10 e Figura 9-
12). Em todos os levantamentos nos dois sentidos, a diferença na altitude não
ultrapassou 1 m (Figura 9-11 e Figura 9-13). A média das diferenças no sentido Rio
Claro Piracicaba é 0.35 m e o desvio padrão é 0.2 m. No sentido Piracicaba- Rio
Claro, a média das diferenças é 0.33 m e o desvio padrão é 0.25 m.
175
Figura 9-10 Perfil do Levantamento com GPS e Estação Total no Sentido Rio Claro-
Piracicaba
176
Figura 9-11 Diferença na Altitude entre o Levantamento com GPS e Estação Total no
Sentido Piracicaba-Rio Claro
177
Figura 9-12 Perfil do Levantamento com GPS e Estação Total no Sentido Piracicaba -
Rio Claro
178
Figura 9-13 Diferença na Altitude entre o Levantamento com GPS e Estação Total no
Sentido Piracicaba - Rio Claro
179
A diferença na declividade da rampa entre o GPS e o projeto não foi superior
a 2.7% (Tabela 9-3) no trecho que vai do km 15 ao km 18 e apenas duas rampas do
projeto foram consideradas curvas pelo método.
No caso da rampa 1, ela foi considerada pelo método como sendo curva, pois
no trecho de 100 m, a variação da declividade foi superior a 0.2% e este valor está
muito próximo da variação da declividade na curvas anterior e posterior à rampa. Isto
pode ter acontecido por causa dos ruídos nos dados do GPS. O mesmo ocorreu com a
rampa 2.
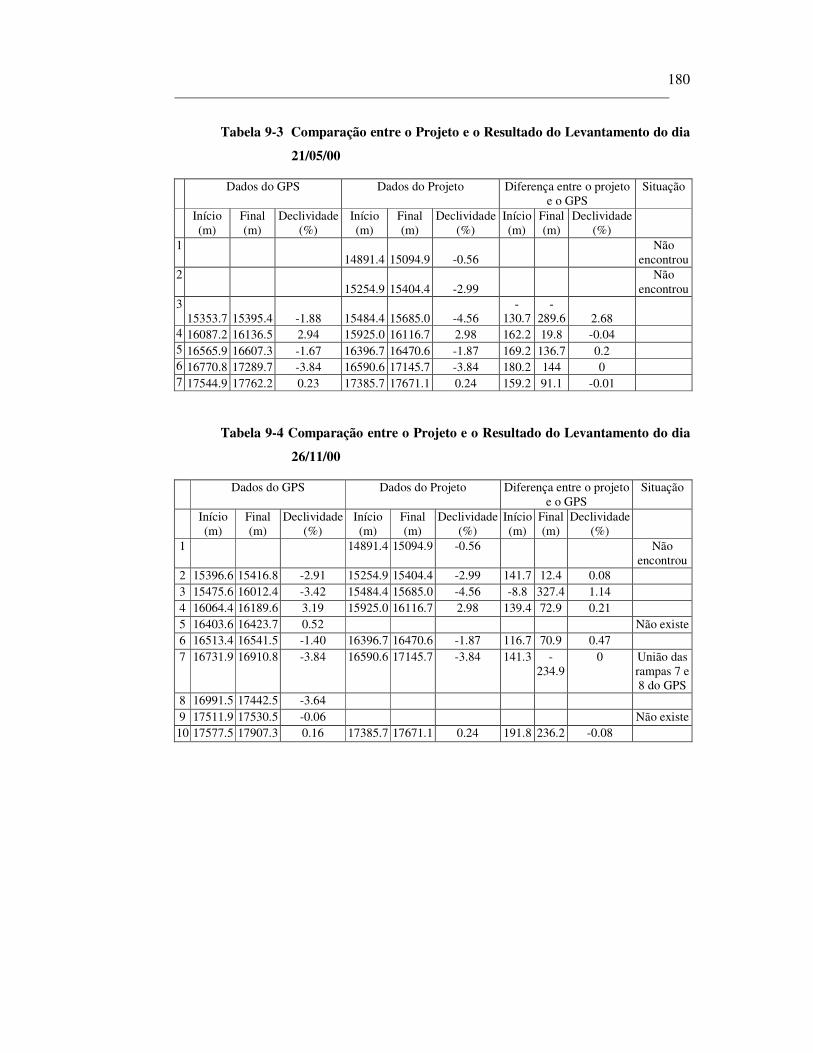
O erro de 2.7 % na determinação da declividade da rampa 3 no levantamento
do dia 21/05/00 aconteceu provavelmente devido ao fato de que, não foram coletados
dados com GPS do km 15.4 ao km 16 que correspondem ao trecho existente entre o
final e começo do levantamento, onde buscou-se evitar o bloqueio do sinal pelo
viaduto e a interferência no tráfego que acessa a interseção em desnível. Desta forma,
do comprimento de 400 m apenas foram coletados dados dos primeiros 50 m que
correspondem a apenas 3 pontos. O mesmo não aconteceu no levantamento do dia
26/11/00, pois para uma distância de 50 m, o número disponível de pontos para o
cálculo da declividade da rampa foi superior a 3. Desta forma, foi possível
determinar a rampa com um erro menor (1,14%).
No levantamento do dia 26/11/00, a diferença entre o projeto e os dados do
GPS na determinação da declividade da rampa não foi superior a 0.5% nas demais
rampas (Tabela 9-4). Da mesma forma, que o levantamento do dia 21/05/00, o
método classificou a rampa 1 como sendo curva e também encontrou duas rampas
que não existem no projeto. Além disso, ele dividiu a rampa do projeto que vai do
km 16.6 ao km 17.1 em duas partes. Neste trecho, a variação da declividade oscilou
muito entre 0 de 0.3% o que levou o método a determinar a existência de uma curva.
Nota-se que o método tem dificuldades de reproduzir fielmente a geometria
sempre que ocorrem variações de declividade de rampas em trechos muito curtos.
180
Tabela 9-3 Comparação entre o Projeto e o Resultado do Levantamento do dia
21/05/00
Dados do GPS Dados do Projeto Diferença entre o projeto e o GPS
Situação
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
1 14891.4 15094.9 -0.56
Não encontrou
2 15254.9 15404.4 -2.99
Não encontrou
3 15353.7 15395.4 -1.88 15484.4 15685.0 -4.56
-130.7
-289.6 2.68
4 16087.2 16136.5 2.94 15925.0 16116.7 2.98 162.2 19.8 -0.04 5 16565.9 16607.3 -1.67 16396.7 16470.6 -1.87 169.2 136.7 0.2 6 16770.8 17289.7 -3.84 16590.6 17145.7 -3.84 180.2 144 0 7 17544.9 17762.2 0.23 17385.7 17671.1 0.24 159.2 91.1 -0.01
Tabela 9-4 Comparação entre o Projeto e o Resultado do Levantamento do dia
26/11/00
Dados do GPS Dados do Projeto Diferença entre o projeto e o GPS
Situação
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
Início (m)
Final (m)
Declividade (%)
1 14891.4 15094.9 -0.56 Não encontrou
2 15396.6 15416.8 -2.91 15254.9 15404.4 -2.99 141.7 12.4 0.08 3 15475.6 16012.4 -3.42 15484.4 15685.0 -4.56 -8.8 327.4 1.14 4 16064.4 16189.6 3.19 15925.0 16116.7 2.98 139.4 72.9 0.21 5 16403.6 16423.7 0.52 Não existe 6 16513.4 16541.5 -1.40 16396.7 16470.6 -1.87 116.7 70.9 0.47 7 16731.9 16910.8 -3.84 16590.6 17145.7 -3.84 141.3 -
234.9 0 União das
rampas 7 e 8 do GPS
8 16991.5 17442.5 -3.64 9 17511.9 17530.5 -0.06 Não existe 10 17577.5 17907.3 0.16 17385.7 17671.1 0.24 191.8 236.2 -0.08
181
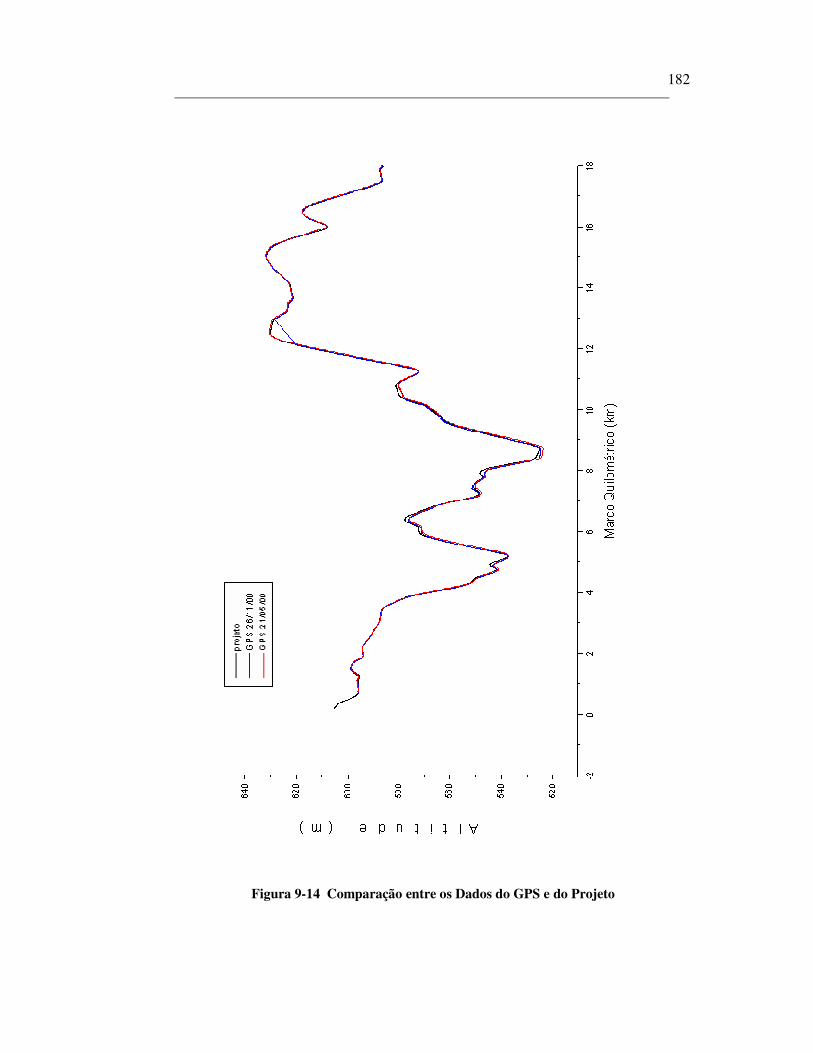
9.3 Comparação dos Dados GPS com os Dados do Projeto Geométrico em um
Trecho de 18 km
Como nos trecho de 3 km os dados GPS estão próximos dos dados de projeto
e da Estação Total, resolveu-se avaliar a diferença do projeto e do GPS em um trecho
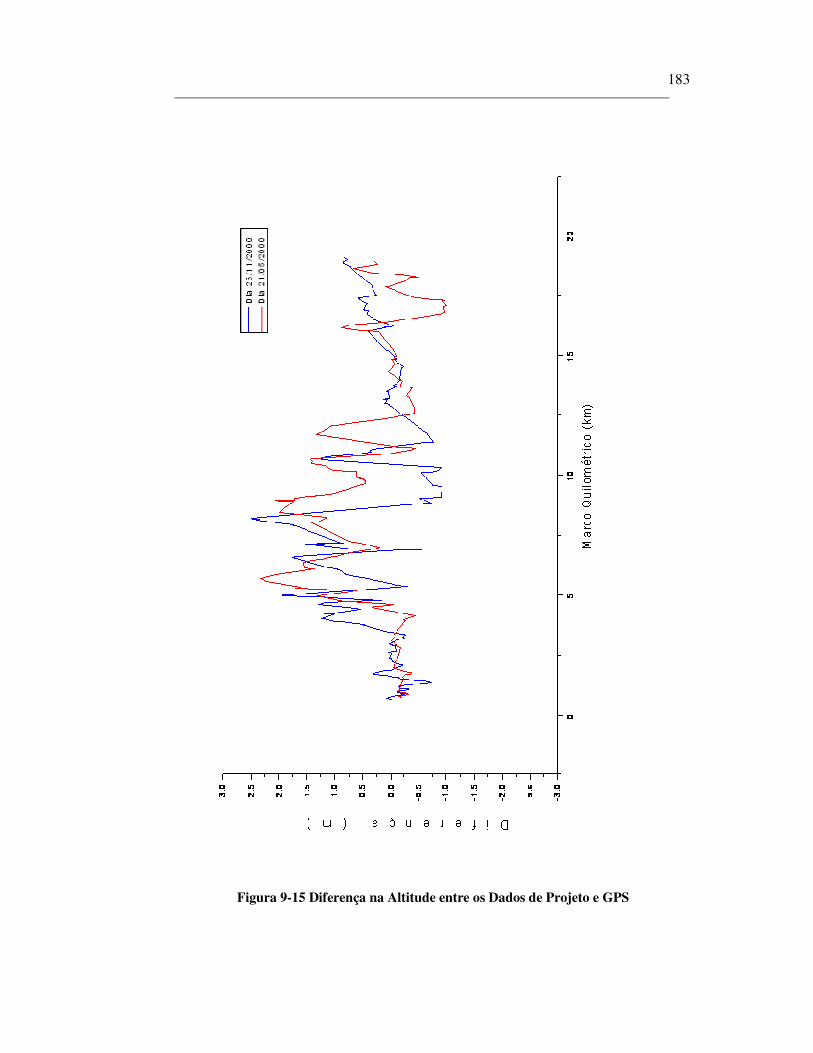
maior. Analisando a diferença entre o GPS e o projeto, verificou-se que em apenas
alguns trechos existe uma diferença razoável entre os dois perfis (Figura 9-14 e
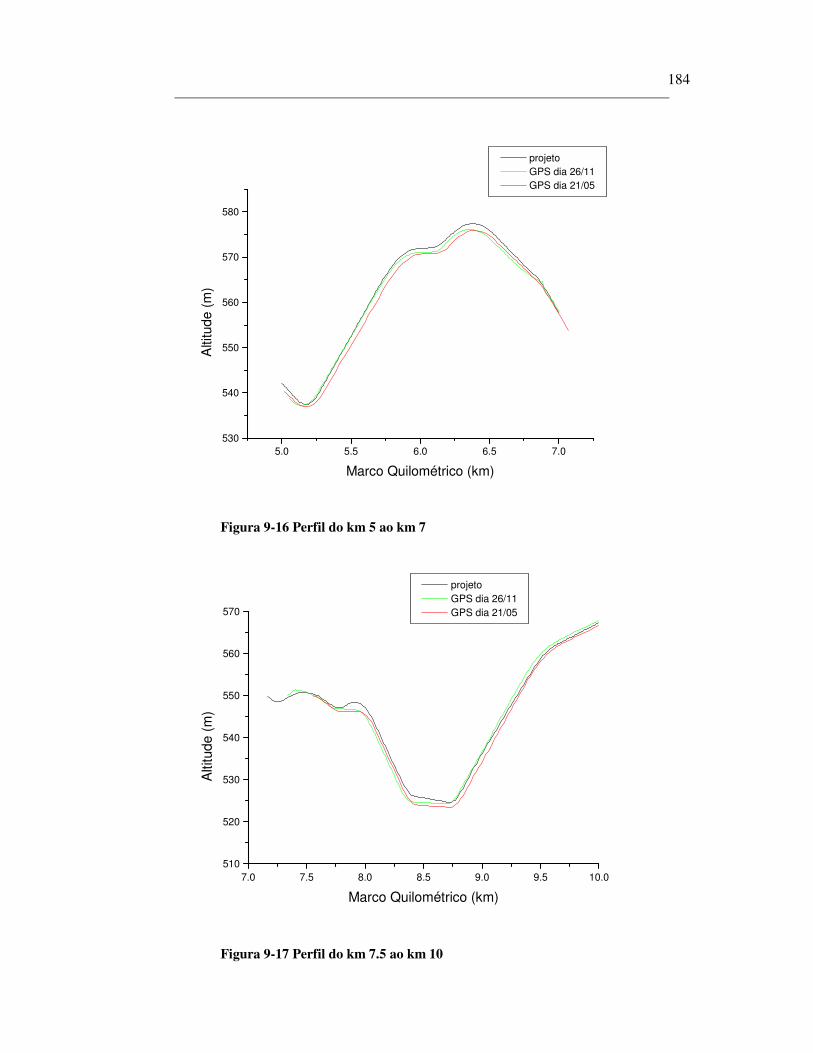
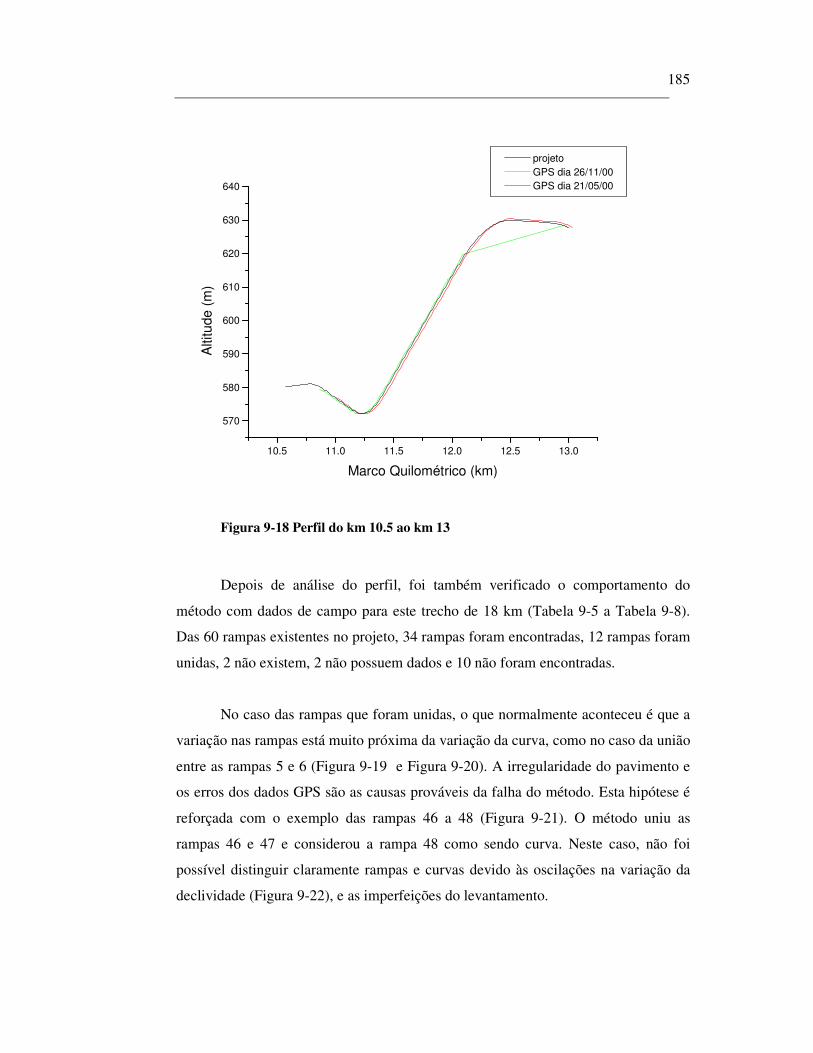
Figura 9-15). As maiores diferenças estão entre o km5 e o km 7 (Figura 9-16), km
7.5 e o km 9 (Figura 9-17), km 10 e o km 11 (Figura 9-18) e no caso do
levantamento do dia 26/11, do km 12 ao 13. Este último, deve-se ao fato de não
terem sido coletados dados neste trecho e esta diferença não aparece na Figura 9-15,
pois foram comparados apenas os pontos existentes nos três grupos de dados.
Entre o km 7.5 e km 10, de uma forma geral, os três perfis seguem o mesmo
traçado, a não ser pela curva próxima do km 8, que aparentemente foi suavizada
durante a construção. Não há grandes diferenças de traçado entre o km 5 e km 7,
basicamente os perfis do GPS estão deslocados em relação ao perfil do projeto
sendo que, a maior diferença ocorreu no dia 21/05. Isto pode ter acontecido, pois os
dados GPS foram coletados em dias e horários diferentes que podem ter afetado a
qualidade dos dados.
182
Figura 9-14 Comparação entre os Dados do GPS e do Projeto
183
Figura 9-15 Diferença na Altitude entre os Dados de Projeto e GPS
184
5.0 5.5 6.0 6.5 7.0530
540
550
560
570
580
projeto GPS dia 26/11 GPS dia 21/05
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-16 Perfil do km 5 ao km 7
7.0 7.5 8.0 8.5 9.0 9.5 10.0510
520
530
540
550
560
570
projeto GPS dia 26/11 GPS dia 21/05
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-17 Perfil do km 7.5 ao km 10
185
10.5 11.0 11.5 12.0 12.5 13.0
570
580
590
600
610
620
630
640
projeto GPS dia 26/11/00 GPS dia 21/05/00
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-18 Perfil do km 10.5 ao km 13
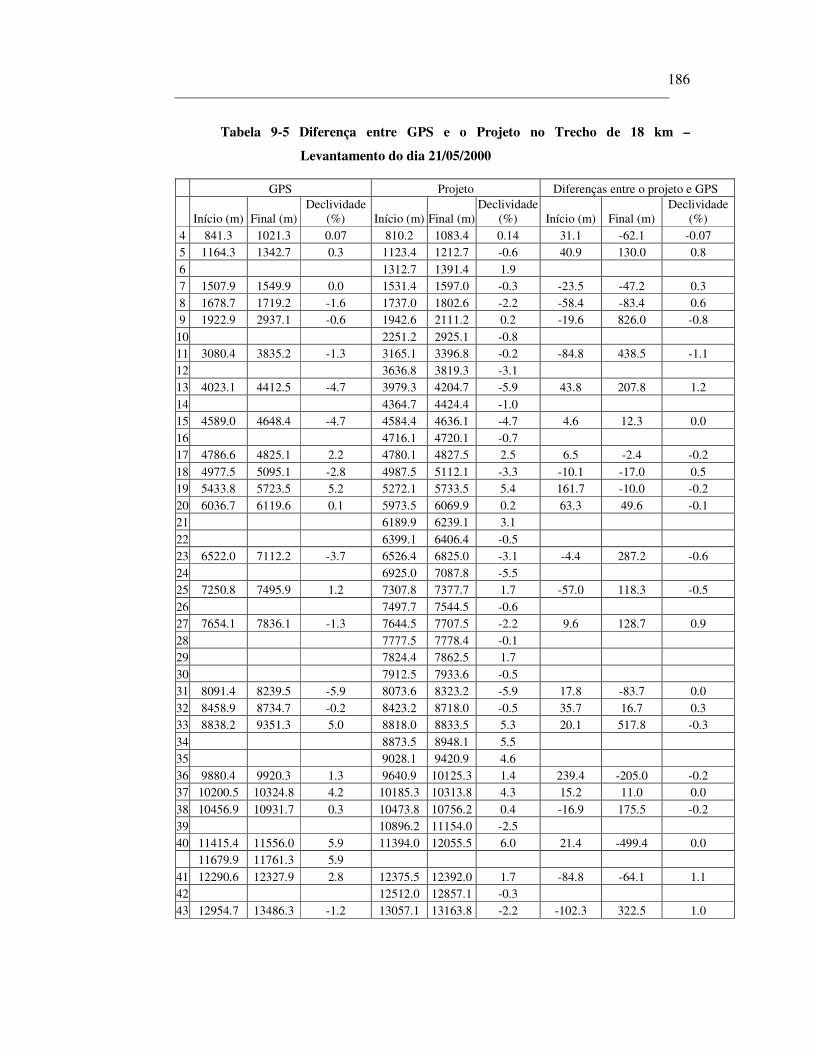
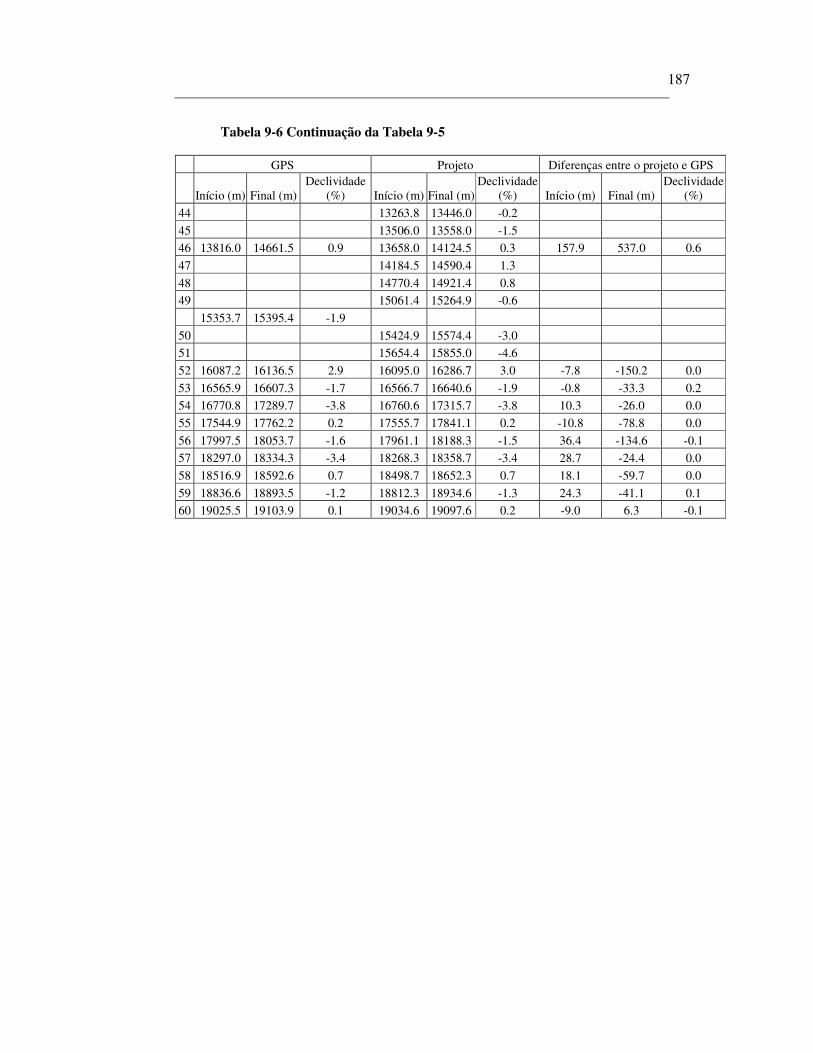
Depois de análise do perfil, foi também verificado o comportamento do
método com dados de campo para este trecho de 18 km (Tabela 9-5 a Tabela 9-8).
Das 60 rampas existentes no projeto, 34 rampas foram encontradas, 12 rampas foram
unidas, 2 não existem, 2 não possuem dados e 10 não foram encontradas.
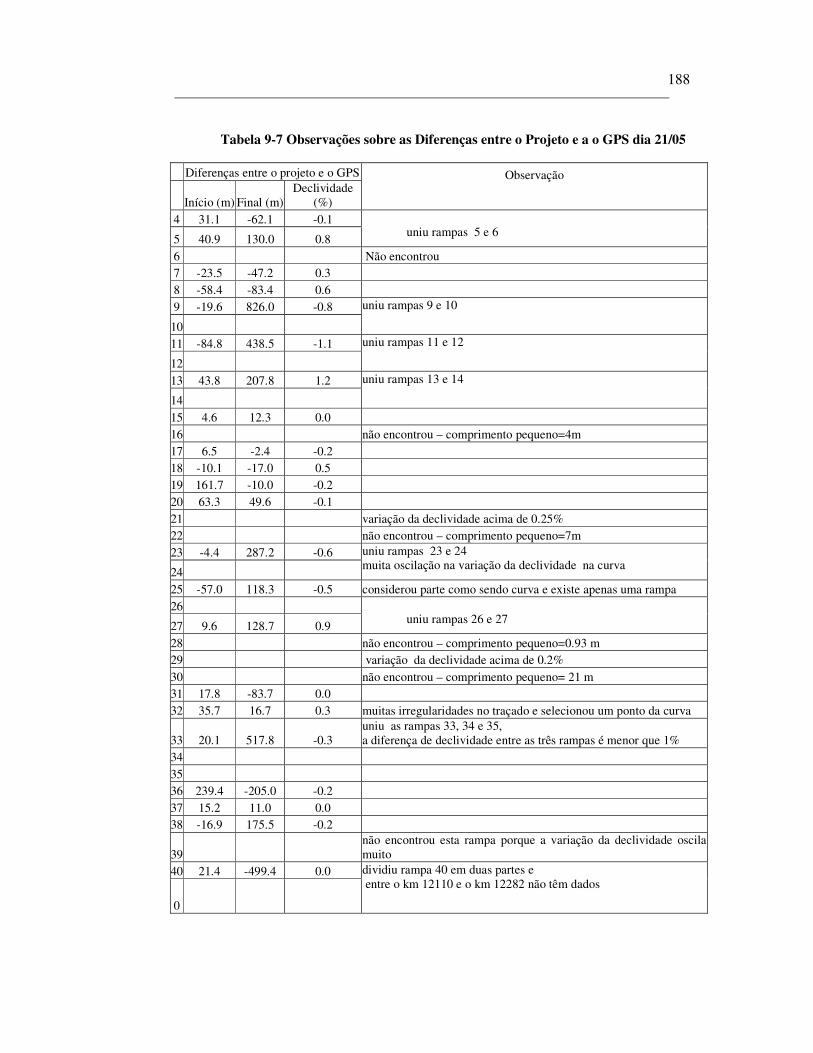
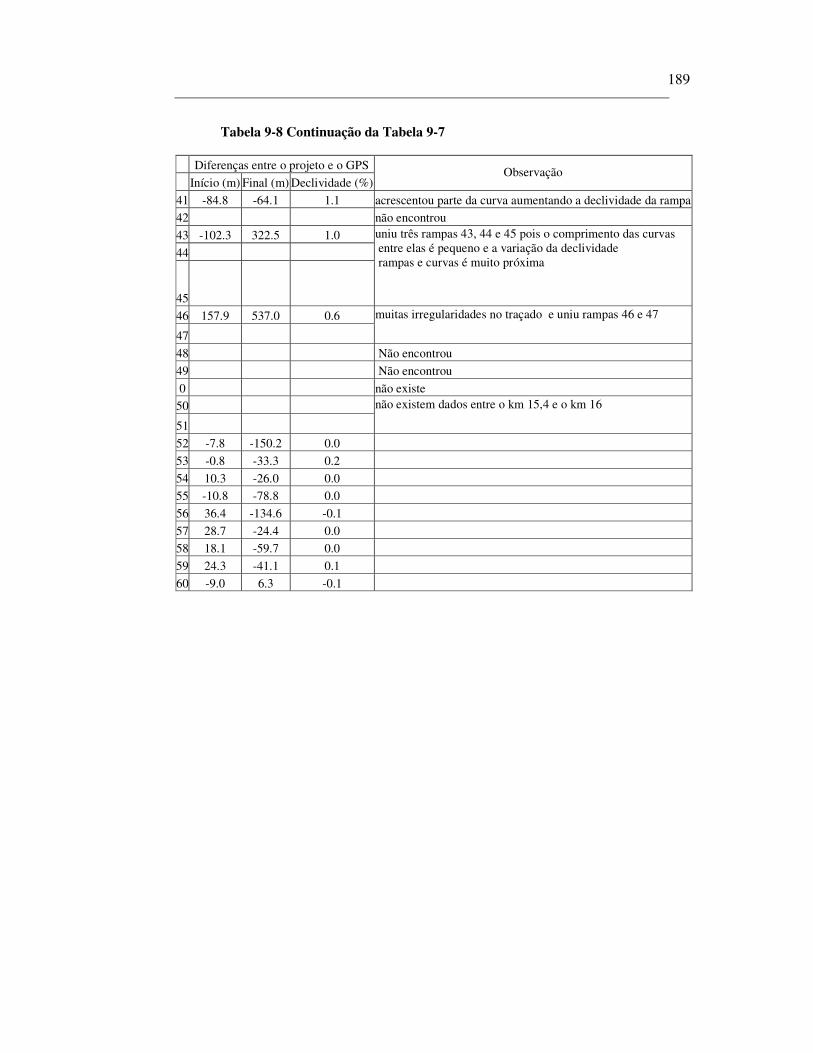
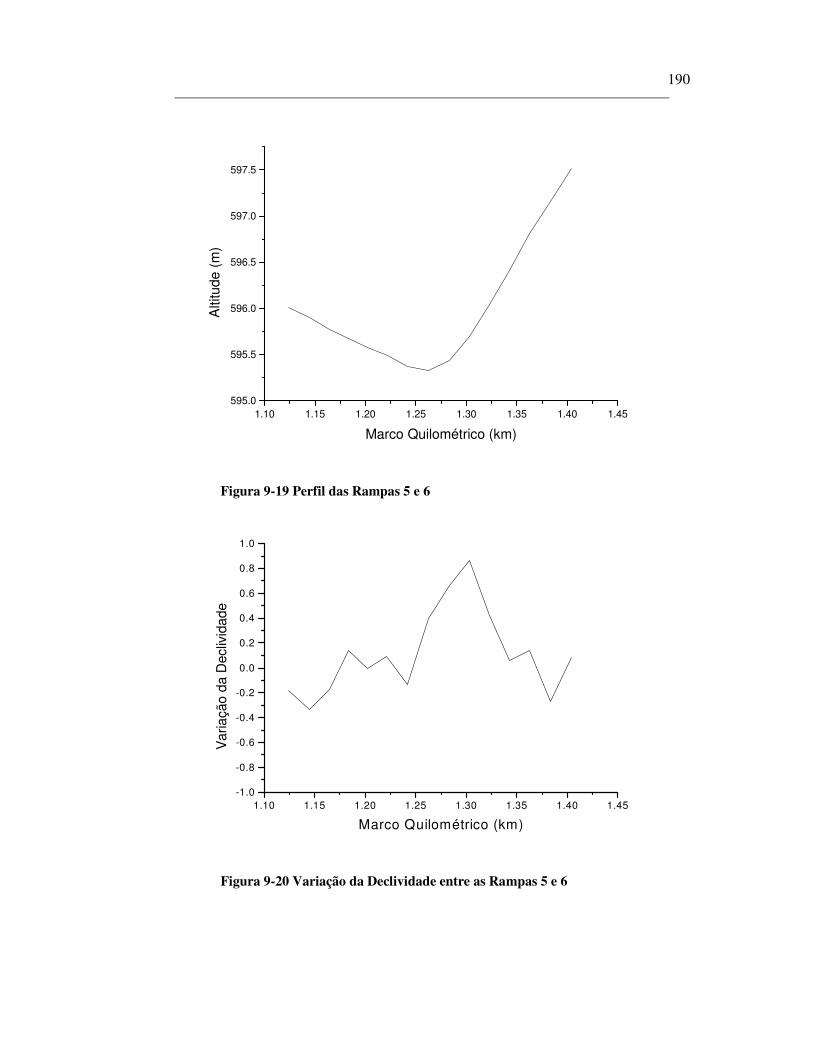
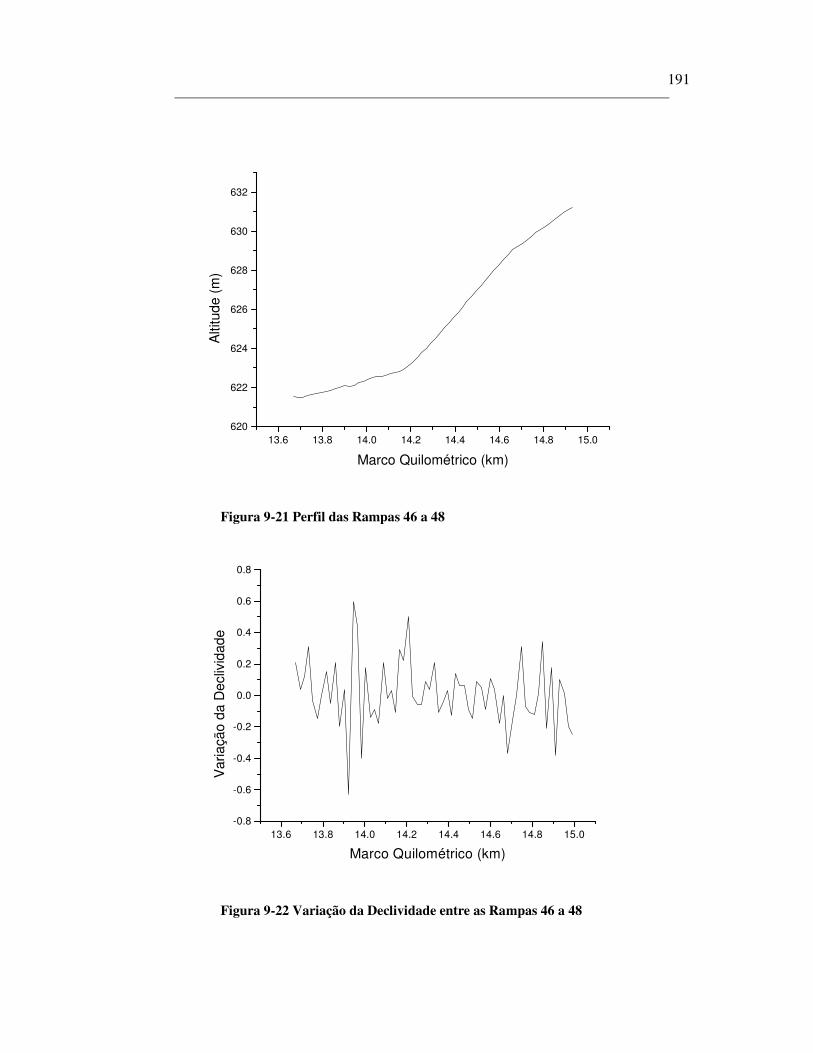
No caso das rampas que foram unidas, o que normalmente aconteceu é que a
variação nas rampas está muito próxima da variação da curva, como no caso da união
entre as rampas 5 e 6 (Figura 9-19 e Figura 9-20). A irregularidade do pavimento e
os erros dos dados GPS são as causas prováveis da falha do método. Esta hipótese é
reforçada com o exemplo das rampas 46 a 48 (Figura 9-21). O método uniu as
rampas 46 e 47 e considerou a rampa 48 como sendo curva. Neste caso, não foi
possível distinguir claramente rampas e curvas devido às oscilações na variação da
declividade (Figura 9-22), e as imperfeições do levantamento.
186
Tabela 9-5 Diferença entre GPS e o Projeto no Trecho de 18 km –
Levantamento do dia 21/05/2000
GPS Projeto Diferenças entre o projeto e GPS
Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) 4 841.3 1021.3 0.07 810.2 1083.4 0.14 31.1 -62.1 -0.07 5 1164.3 1342.7 0.3 1123.4 1212.7 -0.6 40.9 130.0 0.8 6 1312.7 1391.4 1.9 7 1507.9 1549.9 0.0 1531.4 1597.0 -0.3 -23.5 -47.2 0.3 8 1678.7 1719.2 -1.6 1737.0 1802.6 -2.2 -58.4 -83.4 0.6 9 1922.9 2937.1 -0.6 1942.6 2111.2 0.2 -19.6 826.0 -0.8
10 2251.2 2925.1 -0.8 11 3080.4 3835.2 -1.3 3165.1 3396.8 -0.2 -84.8 438.5 -1.1 12 3636.8 3819.3 -3.1 13 4023.1 4412.5 -4.7 3979.3 4204.7 -5.9 43.8 207.8 1.2 14 4364.7 4424.4 -1.0 15 4589.0 4648.4 -4.7 4584.4 4636.1 -4.7 4.6 12.3 0.0 16 4716.1 4720.1 -0.7 17 4786.6 4825.1 2.2 4780.1 4827.5 2.5 6.5 -2.4 -0.2 18 4977.5 5095.1 -2.8 4987.5 5112.1 -3.3 -10.1 -17.0 0.5 19 5433.8 5723.5 5.2 5272.1 5733.5 5.4 161.7 -10.0 -0.2 20 6036.7 6119.6 0.1 5973.5 6069.9 0.2 63.3 49.6 -0.1 21 6189.9 6239.1 3.1 22 6399.1 6406.4 -0.5 23 6522.0 7112.2 -3.7 6526.4 6825.0 -3.1 -4.4 287.2 -0.6 24 6925.0 7087.8 -5.5 25 7250.8 7495.9 1.2 7307.8 7377.7 1.7 -57.0 118.3 -0.5 26 7497.7 7544.5 -0.6 27 7654.1 7836.1 -1.3 7644.5 7707.5 -2.2 9.6 128.7 0.9 28 7777.5 7778.4 -0.1 29 7824.4 7862.5 1.7 30 7912.5 7933.6 -0.5 31 8091.4 8239.5 -5.9 8073.6 8323.2 -5.9 17.8 -83.7 0.0 32 8458.9 8734.7 -0.2 8423.2 8718.0 -0.5 35.7 16.7 0.3 33 8838.2 9351.3 5.0 8818.0 8833.5 5.3 20.1 517.8 -0.3 34 8873.5 8948.1 5.5 35 9028.1 9420.9 4.6 36 9880.4 9920.3 1.3 9640.9 10125.3 1.4 239.4 -205.0 -0.2 37 10200.5 10324.8 4.2 10185.3 10313.8 4.3 15.2 11.0 0.0 38 10456.9 10931.7 0.3 10473.8 10756.2 0.4 -16.9 175.5 -0.2 39 10896.2 11154.0 -2.5 40 11415.4 11556.0 5.9 11394.0 12055.5 6.0 21.4 -499.4 0.0 11679.9 11761.3 5.9
41 12290.6 12327.9 2.8 12375.5 12392.0 1.7 -84.8 -64.1 1.1 42 12512.0 12857.1 -0.3 43 12954.7 13486.3 -1.2 13057.1 13163.8 -2.2 -102.3 322.5 1.0
187
Tabela 9-6 Continuação da Tabela 9-5
GPS Projeto Diferenças entre o projeto e GPS
Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%)
44 13263.8 13446.0 -0.2
45 13506.0 13558.0 -1.5
46 13816.0 14661.5 0.9 13658.0 14124.5 0.3 157.9 537.0 0.6
47 14184.5 14590.4 1.3
48 14770.4 14921.4 0.8
49 15061.4 15264.9 -0.6
15353.7 15395.4 -1.9
50 15424.9 15574.4 -3.0
51 15654.4 15855.0 -4.6
52 16087.2 16136.5 2.9 16095.0 16286.7 3.0 -7.8 -150.2 0.0
53 16565.9 16607.3 -1.7 16566.7 16640.6 -1.9 -0.8 -33.3 0.2
54 16770.8 17289.7 -3.8 16760.6 17315.7 -3.8 10.3 -26.0 0.0
55 17544.9 17762.2 0.2 17555.7 17841.1 0.2 -10.8 -78.8 0.0
56 17997.5 18053.7 -1.6 17961.1 18188.3 -1.5 36.4 -134.6 -0.1
57 18297.0 18334.3 -3.4 18268.3 18358.7 -3.4 28.7 -24.4 0.0
58 18516.9 18592.6 0.7 18498.7 18652.3 0.7 18.1 -59.7 0.0
59 18836.6 18893.5 -1.2 18812.3 18934.6 -1.3 24.3 -41.1 0.1
60 19025.5 19103.9 0.1 19034.6 19097.6 0.2 -9.0 6.3 -0.1
188
Tabela 9-7 Observações sobre as Diferenças entre o Projeto e a o GPS dia 21/05
Diferenças entre o projeto e o GPS
Início (m) Final (m) Declividade
(%)
Observação
4 31.1 -62.1 -0.1
5 40.9 130.0 0.8
uniu rampas 5 e 6
6 Não encontrou 7 -23.5 -47.2 0.3 8 -58.4 -83.4 0.6 9 -19.6 826.0 -0.8
10
uniu rampas 9 e 10
11 -84.8 438.5 -1.1
12
uniu rampas 11 e 12
13 43.8 207.8 1.2
14
uniu rampas 13 e 14
15 4.6 12.3 0.0 16 não encontrou – comprimento pequeno=4m 17 6.5 -2.4 -0.2 18 -10.1 -17.0 0.5 19 161.7 -10.0 -0.2 20 63.3 49.6 -0.1 21 variação da declividade acima de 0.25% 22 não encontrou – comprimento pequeno=7m 23 -4.4 287.2 -0.6
24
uniu rampas 23 e 24 muita oscilação na variação da declividade na curva
25 -57.0 118.3 -0.5 considerou parte como sendo curva e existe apenas uma rampa 26
27 9.6 128.7 0.9
uniu rampas 26 e 27
28 não encontrou – comprimento pequeno=0.93 m 29 variação da declividade acima de 0.2% 30 não encontrou – comprimento pequeno= 21 m 31 17.8 -83.7 0.0 32 35.7 16.7 0.3 muitas irregularidades no traçado e selecionou um ponto da curva
33 20.1 517.8 -0.3 uniu as rampas 33, 34 e 35, a diferença de declividade entre as três rampas é menor que 1%
34 35 36 239.4 -205.0 -0.2 37 15.2 11.0 0.0 38 -16.9 175.5 -0.2
39 não encontrou esta rampa porque a variação da declividade oscila muito
40 21.4 -499.4 0.0
0
dividiu rampa 40 em duas partes e entre o km 12110 e o km 12282 não têm dados
189
Tabela 9-8 Continuação da Tabela 9-7
Diferenças entre o projeto e o GPS
Início (m) Final (m) Declividade (%) Observação
41 -84.8 -64.1 1.1 acrescentou parte da curva aumentando a declividade da rampa
42 não encontrou
43 -102.3 322.5 1.0
44
45
uniu três rampas 43, 44 e 45 pois o comprimento das curvas entre elas é pequeno e a variação da declividade rampas e curvas é muito próxima
46 157.9 537.0 0.6
47
muitas irregularidades no traçado e uniu rampas 46 e 47
48 Não encontrou
49 Não encontrou
0 não existe
50
51
não existem dados entre o km 15,4 e o km 16
52 -7.8 -150.2 0.0
53 -0.8 -33.3 0.2
54 10.3 -26.0 0.0
55 -10.8 -78.8 0.0
56 36.4 -134.6 -0.1
57 28.7 -24.4 0.0
58 18.1 -59.7 0.0
59 24.3 -41.1 0.1
60 -9.0 6.3 -0.1
190
1.10 1.15 1.20 1.25 1.30 1.35 1.40 1.45595.0
595.5
596.0
596.5
597.0
597.5
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-19 Perfil das Rampas 5 e 6
1.10 1.15 1.20 1.25 1.30 1.35 1.40 1.45-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
Var
iaçã
o da
Dec
livid
ade
Marco Quilométrico (km)
Figura 9-20 Variação da Declividade entre as Rampas 5 e 6
191
13.6 13.8 14.0 14.2 14.4 14.6 14.8 15.0620
622
624
626
628
630
632
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-21 Perfil das Rampas 46 a 48
13.6 13.8 14.0 14.2 14.4 14.6 14.8 15.0-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
Var
iaçã
o da
Dec
livid
ade
Marco Quilométrico (km)
Figura 9-22 Variação da Declividade entre as Rampas 46 a 48
192
Os dados GPS, com espaçamento de 10 m do dia 26/11, também foram
processados e analisados neste trecho. Neste dia, ao invés de unir rampas, o método
dividiu boa parte delas. Então, das 60 rampas existentes no projeto, 10 rampas foram
divididas em duas ou três partes, 6 rampas não foram encontradas e em duas rampas
não existiam dados. Além disso, foram classificadas 14 curvas que não existiam no
projeto. Da mesma forma, que nos dados do dia 21/05, as imperfeições do
levantamento criaram estes erros na determinação das rampas pelo método.
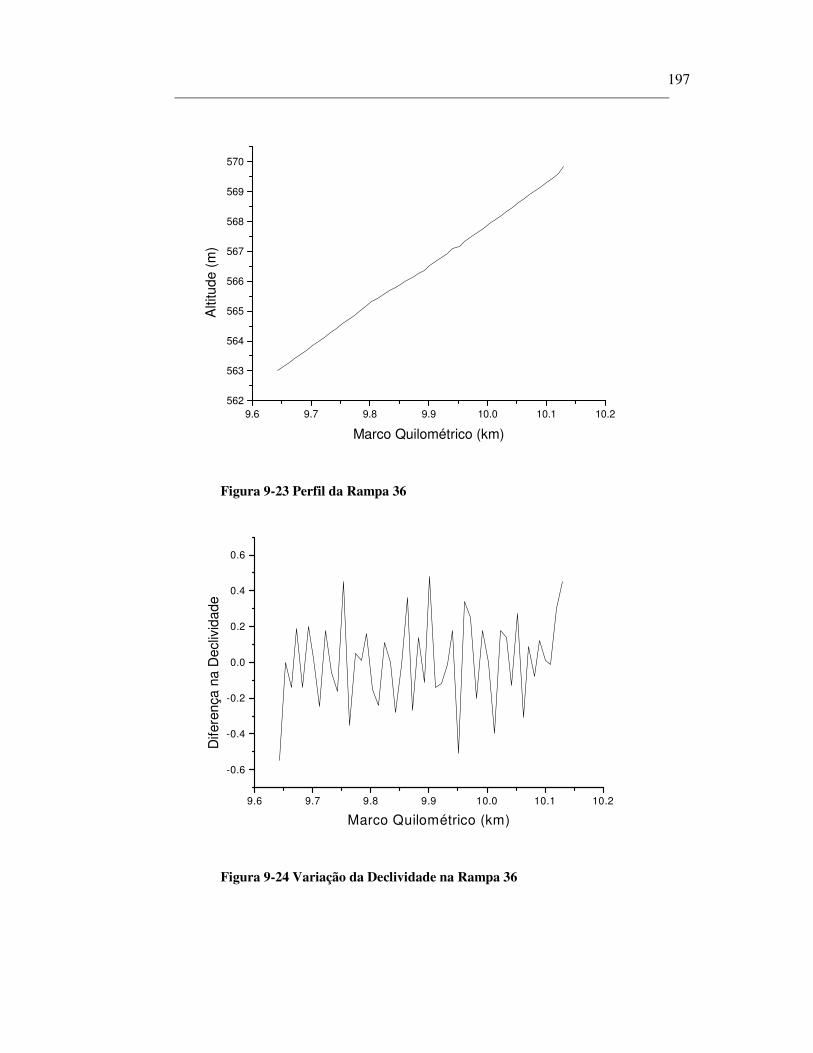
Um bom exemplo é a rampa 36 do projeto. Este rampa foi dividida em três
partes pelo método (Figura 9-23). As erros no levantamento causaram uma oscilação
considerável na variação da declividade (Figura 9-24) que fez com que o método
encontrasse duas curvas neste trecho.
Para o caso do perfil, a melhor solução encontrada foi com os dados com
espaçamento de 10 m. A divisão das rampas fez com que o perfil gerado pelo método
se aproximasse mais dos dados. Além disso, 42 rampas foram encontradas no dia
26/11 contra 34 dos dados do dia 21/05 (espaçamento de 20 m). A desvantagem é
que o número de curvas encontradas com estes dados é bem superior ao do
espaçamento de 20 m.
De acordo com o dados apresentados, para o caso do perfil é aconselhável
trabalhar com um espaçamento entre dados de 10 m, pois foi o que gerou o menor
erro do traçado. Além disso, caso ocorra algum problema nos dados é possível
aumentar o espaçamento para verificar o comportamento do método antes de refazer
o levantamento.
193
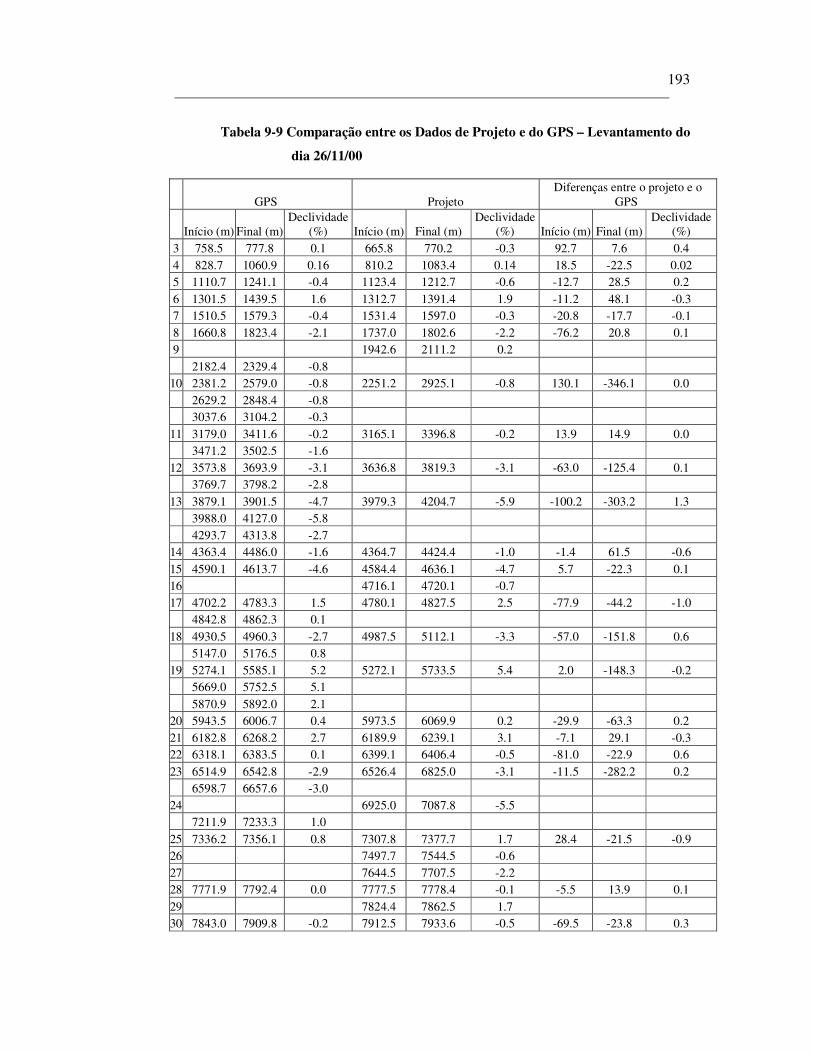
Tabela 9-9 Comparação entre os Dados de Projeto e do GPS – Levantamento do
dia 26/11/00
GPS Projeto Diferenças entre o projeto e o
GPS
Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) 3 758.5 777.8 0.1 665.8 770.2 -0.3 92.7 7.6 0.4 4 828.7 1060.9 0.16 810.2 1083.4 0.14 18.5 -22.5 0.02 5 1110.7 1241.1 -0.4 1123.4 1212.7 -0.6 -12.7 28.5 0.2 6 1301.5 1439.5 1.6 1312.7 1391.4 1.9 -11.2 48.1 -0.3 7 1510.5 1579.3 -0.4 1531.4 1597.0 -0.3 -20.8 -17.7 -0.1 8 1660.8 1823.4 -2.1 1737.0 1802.6 -2.2 -76.2 20.8 0.1 9 1942.6 2111.2 0.2 2182.4 2329.4 -0.8
10 2381.2 2579.0 -0.8 2251.2 2925.1 -0.8 130.1 -346.1 0.0 2629.2 2848.4 -0.8 3037.6 3104.2 -0.3
11 3179.0 3411.6 -0.2 3165.1 3396.8 -0.2 13.9 14.9 0.0 3471.2 3502.5 -1.6
12 3573.8 3693.9 -3.1 3636.8 3819.3 -3.1 -63.0 -125.4 0.1 3769.7 3798.2 -2.8
13 3879.1 3901.5 -4.7 3979.3 4204.7 -5.9 -100.2 -303.2 1.3 3988.0 4127.0 -5.8 4293.7 4313.8 -2.7
14 4363.4 4486.0 -1.6 4364.7 4424.4 -1.0 -1.4 61.5 -0.6 15 4590.1 4613.7 -4.6 4584.4 4636.1 -4.7 5.7 -22.3 0.1 16 4716.1 4720.1 -0.7 17 4702.2 4783.3 1.5 4780.1 4827.5 2.5 -77.9 -44.2 -1.0 4842.8 4862.3 0.1
18 4930.5 4960.3 -2.7 4987.5 5112.1 -3.3 -57.0 -151.8 0.6 5147.0 5176.5 0.8
19 5274.1 5585.1 5.2 5272.1 5733.5 5.4 2.0 -148.3 -0.2 5669.0 5752.5 5.1 5870.9 5892.0 2.1
20 5943.5 6006.7 0.4 5973.5 6069.9 0.2 -29.9 -63.3 0.2 21 6182.8 6268.2 2.7 6189.9 6239.1 3.1 -7.1 29.1 -0.3 22 6318.1 6383.5 0.1 6399.1 6406.4 -0.5 -81.0 -22.9 0.6 23 6514.9 6542.8 -2.9 6526.4 6825.0 -3.1 -11.5 -282.2 0.2 6598.7 6657.6 -3.0
24 6925.0 7087.8 -5.5 7211.9 7233.3 1.0
25 7336.2 7356.1 0.8 7307.8 7377.7 1.7 28.4 -21.5 -0.9 26 7497.7 7544.5 -0.6 27 7644.5 7707.5 -2.2 28 7771.9 7792.4 0.0 7777.5 7778.4 -0.1 -5.5 13.9 0.1 29 7824.4 7862.5 1.7 30 7843.0 7909.8 -0.2 7912.5 7933.6 -0.5 -69.5 -23.8 0.3
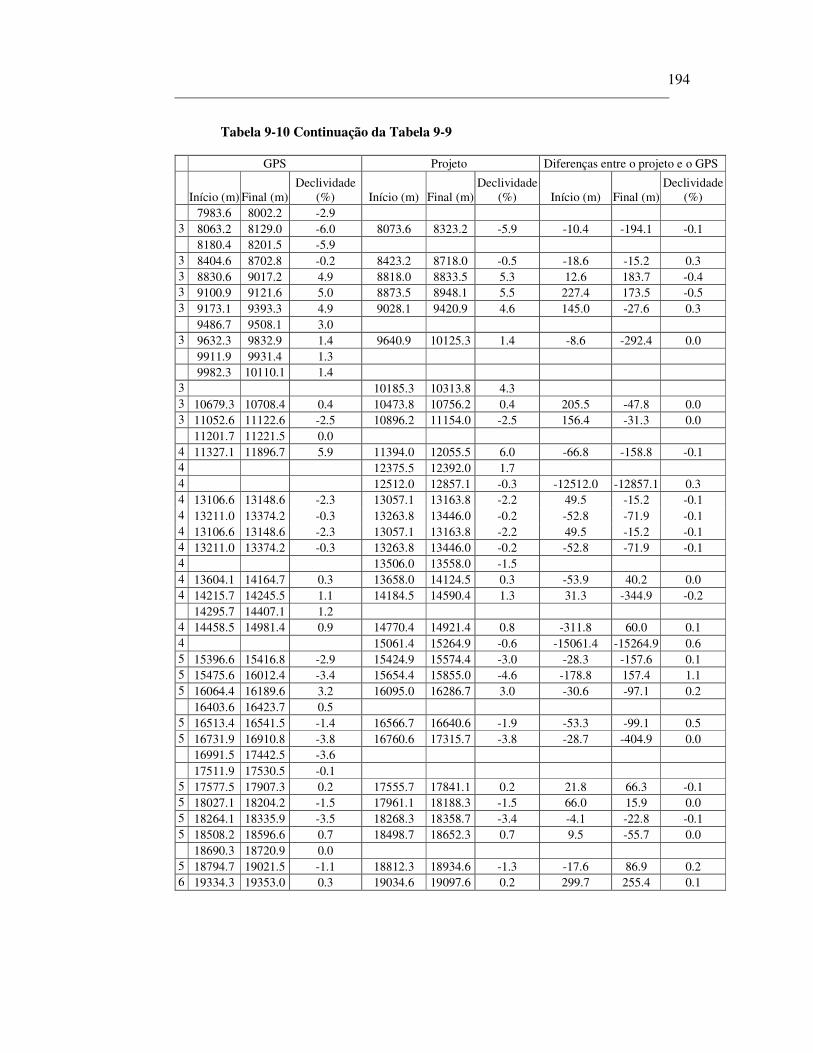
194
Tabela 9-10 Continuação da Tabela 9-9
GPS Projeto Diferenças entre o projeto e o GPS
Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) Início (m) Final (m) Declividade
(%) 7983.6 8002.2 -2.9
31
8063.2 8129.0 -6.0 8073.6 8323.2 -5.9 -10.4 -194.1 -0.1 8180.4 8201.5 -5.9 32
8404.6 8702.8 -0.2 8423.2 8718.0 -0.5 -18.6 -15.2 0.3 33
8830.6 9017.2 4.9 8818.0 8833.5 5.3 12.6 183.7 -0.4 34
9100.9 9121.6 5.0 8873.5 8948.1 5.5 227.4 173.5 -0.5 35
9173.1 9393.3 4.9 9028.1 9420.9 4.6 145.0 -27.6 0.3 9486.7 9508.1 3.0 36
9632.3 9832.9 1.4 9640.9 10125.3 1.4 -8.6 -292.4 0.0 9911.9 9931.4 1.3 9982.3 10110.1 1.4 37
10185.3 10313.8 4.3 38
10679.3 10708.4 0.4 10473.8 10756.2 0.4 205.5 -47.8 0.0 39
11052.6 11122.6 -2.5 10896.2 11154.0 -2.5 156.4 -31.3 0.0 11201.7 11221.5 0.0 40
11327.1 11896.7 5.9 11394.0 12055.5 6.0 -66.8 -158.8 -0.1 41
12375.5 12392.0 1.7 42
12512.0 12857.1 -0.3 -12512.0 -12857.1 0.3 43
13106.6 13148.6 -2.3 13057.1 13163.8 -2.2 49.5 -15.2 -0.1 44
13211.0 13374.2 -0.3 13263.8 13446.0 -0.2 -52.8 -71.9 -0.1 43
13106.6 13148.6 -2.3 13057.1 13163.8 -2.2 49.5 -15.2 -0.1 44
13211.0 13374.2 -0.3 13263.8 13446.0 -0.2 -52.8 -71.9 -0.1 45
13506.0 13558.0 -1.5 46
13604.1 14164.7 0.3 13658.0 14124.5 0.3 -53.9 40.2 0.0 47
14215.7 14245.5 1.1 14184.5 14590.4 1.3 31.3 -344.9 -0.2 14295.7 14407.1 1.2 48
14458.5 14981.4 0.9 14770.4 14921.4 0.8 -311.8 60.0 0.1 49
15061.4 15264.9 -0.6 -15061.4 -15264.9 0.6 50
15396.6 15416.8 -2.9 15424.9 15574.4 -3.0 -28.3 -157.6 0.1 51
15475.6 16012.4 -3.4 15654.4 15855.0 -4.6 -178.8 157.4 1.1 52
16064.4 16189.6 3.2 16095.0 16286.7 3.0 -30.6 -97.1 0.2 16403.6 16423.7 0.5 53
16513.4 16541.5 -1.4 16566.7 16640.6 -1.9 -53.3 -99.1 0.5 54
16731.9 16910.8 -3.8 16760.6 17315.7 -3.8 -28.7 -404.9 0.0 16991.5 17442.5 -3.6 17511.9 17530.5 -0.1 55
17577.5 17907.3 0.2 17555.7 17841.1 0.2 21.8 66.3 -0.1 56
18027.1 18204.2 -1.5 17961.1 18188.3 -1.5 66.0 15.9 0.0 57
18264.1 18335.9 -3.5 18268.3 18358.7 -3.4 -4.1 -22.8 -0.1 58
18508.2 18596.6 0.7 18498.7 18652.3 0.7 9.5 -55.7 0.0 18690.3 18720.9 0.0 59
18794.7 19021.5 -1.1 18812.3 18934.6 -1.3 -17.6 86.9 0.2 60
19334.3 19353.0 0.3 19034.6 19097.6 0.2 299.7 255.4 0.1
195
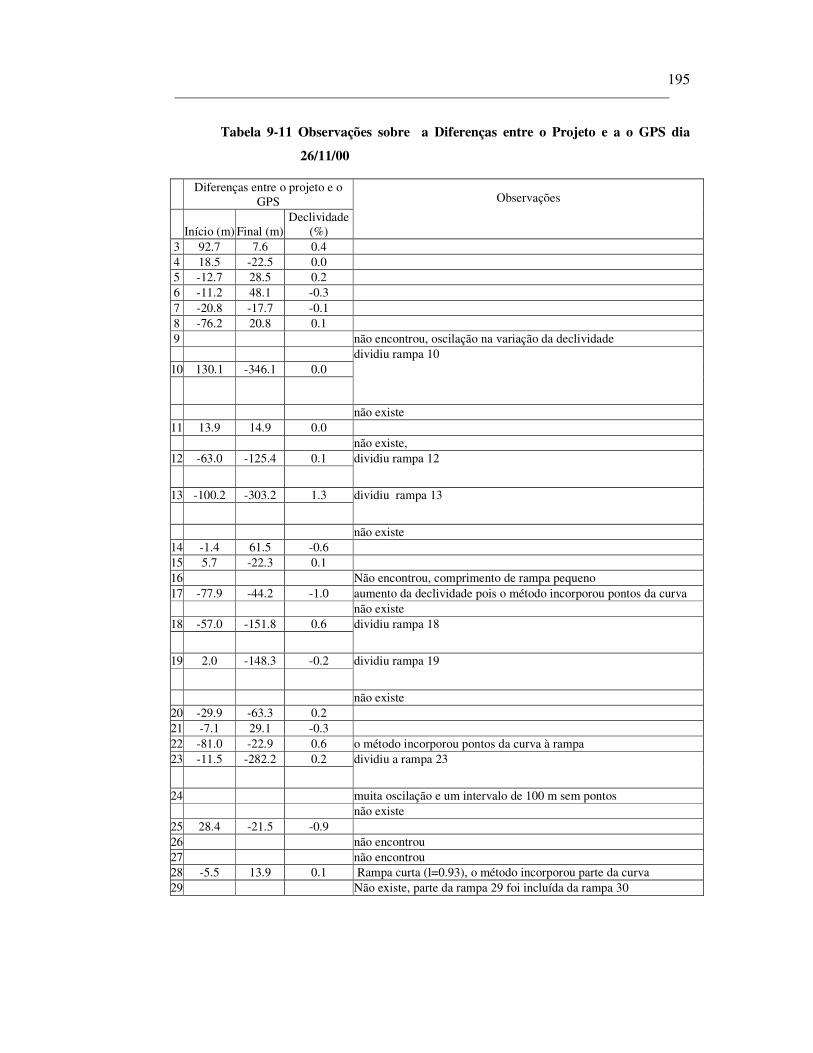
Tabela 9-11 Observações sobre a Diferenças entre o Projeto e a o GPS dia
26/11/00
Diferenças entre o projeto e o
GPS
Início (m) Final (m) Declividade
(%)
Observações
3 92.7 7.6 0.4 4 18.5 -22.5 0.0 5 -12.7 28.5 0.2 6 -11.2 48.1 -0.3 7 -20.8 -17.7 -0.1 8 -76.2 20.8 0.1 9 não encontrou, oscilação na variação da declividade
10 130.1 -346.1 0.0
dividiu rampa 10
não existe 11 13.9 14.9 0.0 não existe,
12 -63.0 -125.4 0.1
dividiu rampa 12
13 -100.2 -303.2 1.3
dividiu rampa 13
não existe 14 -1.4 61.5 -0.6 15 5.7 -22.3 0.1 16 Não encontrou, comprimento de rampa pequeno 17 -77.9 -44.2 -1.0 aumento da declividade pois o método incorporou pontos da curva não existe
18 -57.0 -151.8 0.6
dividiu rampa 18
19 2.0 -148.3 -0.2
dividiu rampa 19
não existe 20 -29.9 -63.3 0.2 21 -7.1 29.1 -0.3 22 -81.0 -22.9 0.6 o método incorporou pontos da curva à rampa 23 -11.5 -282.2 0.2
dividiu a rampa 23
24 muita oscilação e um intervalo de 100 m sem pontos não existe
25 28.4 -21.5 -0.9 26 não encontrou 27 não encontrou 28 -5.5 13.9 0.1 Rampa curta (l=0.93), o método incorporou parte da curva 29 Não existe, parte da rampa 29 foi incluída da rampa 30
196
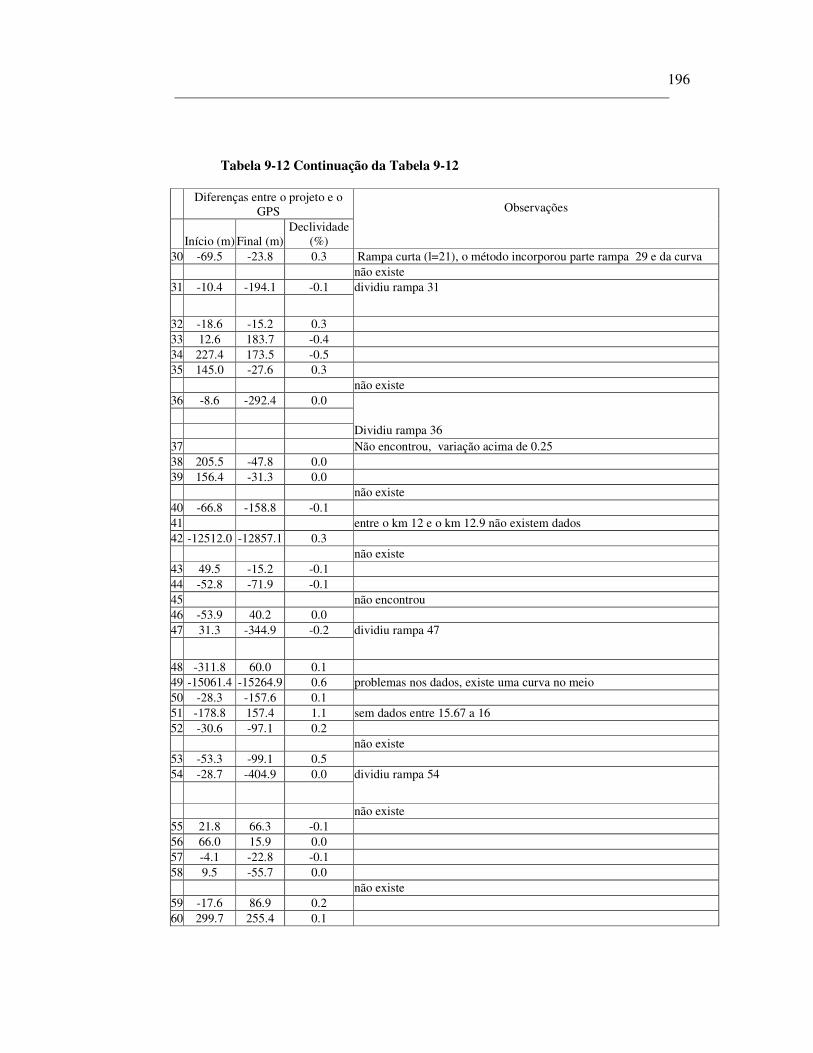
Tabela 9-12 Continuação da Tabela 9-12
Diferenças entre o projeto e o
GPS
Início (m) Final (m) Declividade
(%)
Observações
30 -69.5 -23.8 0.3 Rampa curta (l=21), o método incorporou parte rampa 29 e da curva não existe
31 -10.4 -194.1 -0.1
dividiu rampa 31
32 -18.6 -15.2 0.3 33 12.6 183.7 -0.4 34 227.4 173.5 -0.5 35 145.0 -27.6 0.3 não existe
36 -8.6 -292.4 0.0 Dividiu rampa 36
37 Não encontrou, variação acima de 0.25 38 205.5 -47.8 0.0 39 156.4 -31.3 0.0 não existe
40 -66.8 -158.8 -0.1 41 entre o km 12 e o km 12.9 não existem dados 42 -12512.0 -12857.1 0.3 não existe
43 49.5 -15.2 -0.1 44 -52.8 -71.9 -0.1 45 não encontrou 46 -53.9 40.2 0.0 47 31.3 -344.9 -0.2
dividiu rampa 47
48 -311.8 60.0 0.1 49 -15061.4 -15264.9 0.6 problemas nos dados, existe uma curva no meio 50 -28.3 -157.6 0.1 51 -178.8 157.4 1.1 sem dados entre 15.67 a 16 52 -30.6 -97.1 0.2 não existe
53 -53.3 -99.1 0.5 54 -28.7 -404.9 0.0
dividiu rampa 54
não existe 55 21.8 66.3 -0.1 56 66.0 15.9 0.0 57 -4.1 -22.8 -0.1 58 9.5 -55.7 0.0 não existe
59 -17.6 86.9 0.2 60 299.7 255.4 0.1
197
9.6 9.7 9.8 9.9 10.0 10.1 10.2562
563
564
565
566
567
568
569
570
Alti
tude
(m
)
Marco Quilométrico (km)
Figura 9-23 Perfil da Rampa 36
9.6 9.7 9.8 9.9 10.0 10.1 10.2
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
Dife
renç
a na
Dec
livid
ade
Marco Quilométrico (km)
Figura 9-24 Variação da Declividade na Rampa 36
198
9.4 Determinação do Perfil da Rodovia no Sentido Rio Claro-Piracicaba-
Trecho Total
Para o processamento dos dados do perfil nos dois sentidos através do método
foram considerados os seguintes intervalos:
� ξ variou entre 0.0001 a 0.006 (este valor corresponde a uma variação
de 0.6% na declividade da rampa) com incremento de 0.0002.
� τ igual a 2
� η variou entre 3 e 4
� os dados foram divididos 6 vezes
� o valor do raio limite foi de 30000 m
O levantamento do dia 21/05/00 foi realizado com espaçamento entre pontos
de cerca de 20 m e do dia 26/11/00 o espaçamento é de cerca de 10 m. Os resultados
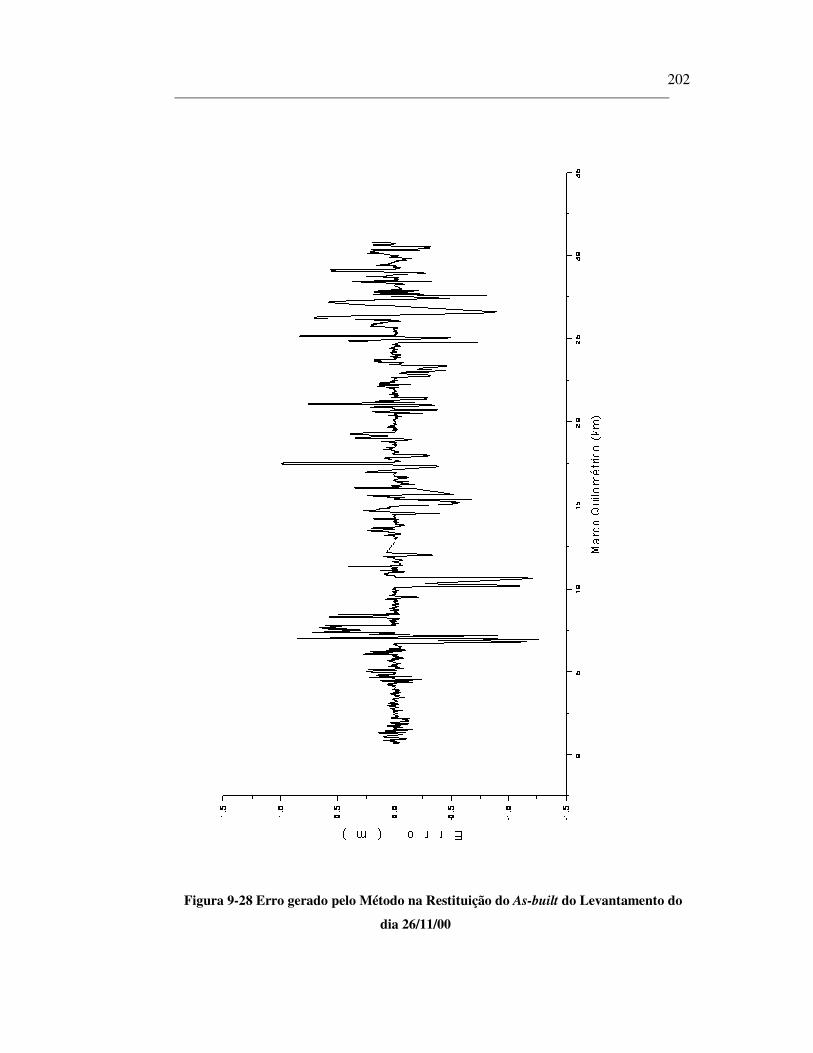
do levantamento são apresentados na Figura 9-25 a Figura 9-28. O erro máximo
encontrado pelo método na reconstituição do perfil foi de 3 m no dia 21/05 e de 1.5
m no dia 26/11. Das 100 rampas existentes no projeto, o método encontrou 115
rampas com os dados do dia 26/11/00 e 67 rampas com os dados do dia 21/05/00. O
comportamento encontrado no trecho de 18 km foi o mesmo para o trecho de 31 km.
Ou seja, as razões pelas quais o método determinou mais rampas do que as existentes
no projeto já foram explicadas no item anterior.
199
Figura 9-25 Comparação entre o Perfil Determinado pelo Método e o Perfil Levantado
no dia 21/05/00 com Espaçamento de 20 m
200
Figura 9-26 Erro Gerado pelo Método na Restituição do As-built do Levantamento do
dia 21/05/00
201
Figura 9-27 Comparação entre o Perfil Determinado pelo Método e o Perfil Levantado
no dia 26/11/00 com Espaçamento de 10 m
202
Figura 9-28 Erro gerado pelo Método na Restituição do As-built do Levantamento do
dia 26/11/00/11/00
203
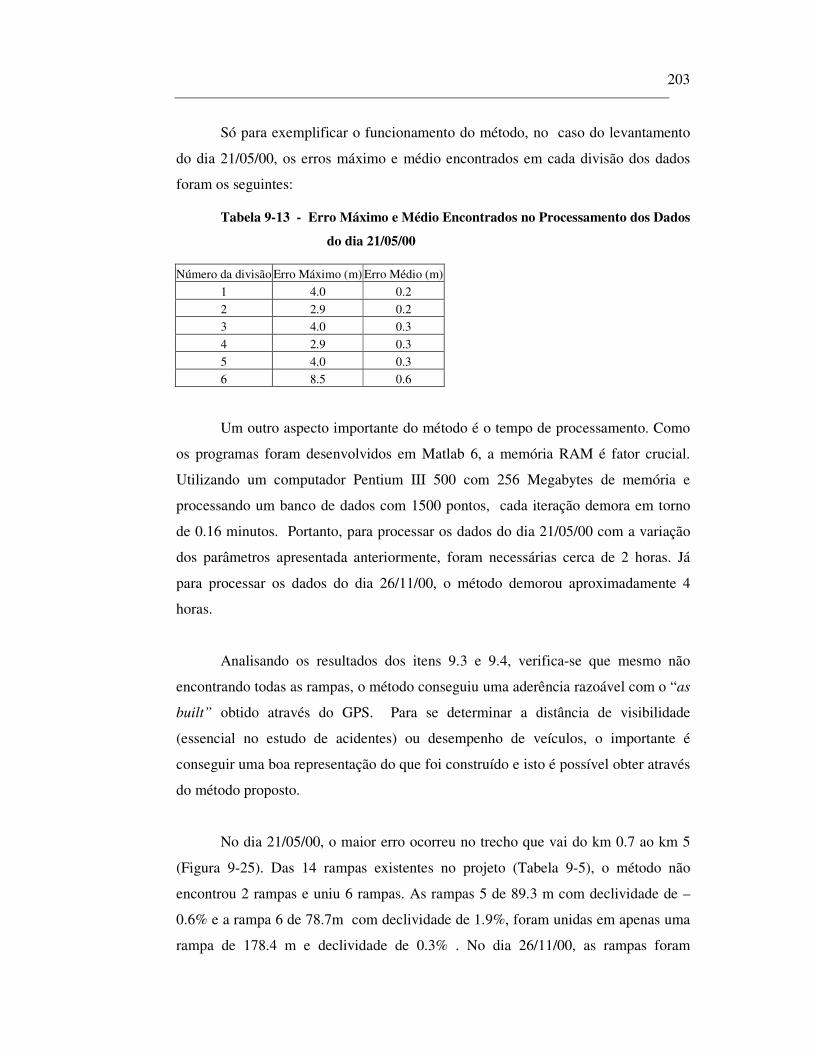
Só para exemplificar o funcionamento do método, no caso do levantamento
do dia 21/05/00, os erros máximo e médio encontrados em cada divisão dos dados
foram os seguintes:
Tabela 9-13 - Erro Máximo e Médio Encontrados no Processamento dos Dados
do dia 21/05/00
Um outro aspecto importante do método é o tempo de processamento. Como
os programas foram desenvolvidos em Matlab 6, a memória RAM é fator crucial.
Utilizando um computador Pentium III 500 com 256 Megabytes de memória e
processando um banco de dados com 1500 pontos, cada iteração demora em torno
de 0.16 minutos. Portanto, para processar os dados do dia 21/05/00 com a variação
dos parâmetros apresentada anteriormente, foram necessárias cerca de 2 horas. Já
para processar os dados do dia 26/11/00, o método demorou aproximadamente 4
horas.
Analisando os resultados dos itens 9.3 e 9.4, verifica-se que mesmo não
encontrando todas as rampas, o método conseguiu uma aderência razoável com o “as
built” obtido através do GPS. Para se determinar a distância de visibilidade
(essencial no estudo de acidentes) ou desempenho de veículos, o importante é
conseguir uma boa representação do que foi construído e isto é possível obter através
do método proposto.
No dia 21/05/00, o maior erro ocorreu no trecho que vai do km 0.7 ao km 5
(Figura 9-25). Das 14 rampas existentes no projeto (Tabela 9-5), o método não
encontrou 2 rampas e uniu 6 rampas. As rampas 5 de 89.3 m com declividade de –
0.6% e a rampa 6 de 78.7m com declividade de 1.9%, foram unidas em apenas uma
rampa de 178.4 m e declividade de 0.3% . No dia 26/11/00, as rampas foram
Número da divisão Erro Máximo (m) Erro Médio (m)
1 4.0 0.2
2 2.9 0.2
3 4.0 0.3
4 2.9 0.3
5 4.0 0.3
6 8.5 0.6
204
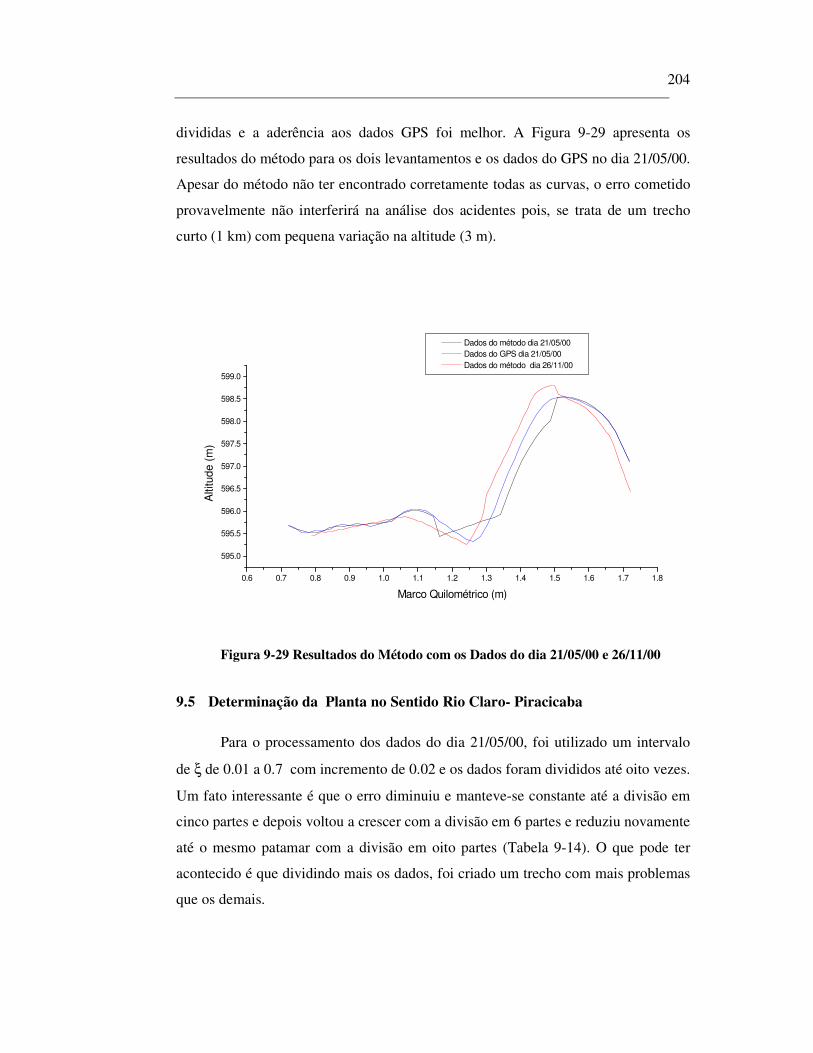
divididas e a aderência aos dados GPS foi melhor. A Figura 9-29 apresenta os
resultados do método para os dois levantamentos e os dados do GPS no dia 21/05/00.
Apesar do método não ter encontrado corretamente todas as curvas, o erro cometido
provavelmente não interferirá na análise dos acidentes pois, se trata de um trecho
curto (1 km) com pequena variação na altitude (3 m).
0.6 0.7 0.8 0.9 1.0 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8
595.0
595.5
596.0
596.5
597.0
597.5
598.0
598.5
599.0
Dados do método dia 21/05/00 Dados do GPS dia 21/05/00 Dados do método dia 26/11/00
Alti
tude
(m
)
Marco Quilométrico (m)
Figura 9-29 Resultados do Método com os Dados do dia 21/05/00 e 26/11/00
9.5 Determinação da Planta no Sentido Rio Claro- Piracicaba
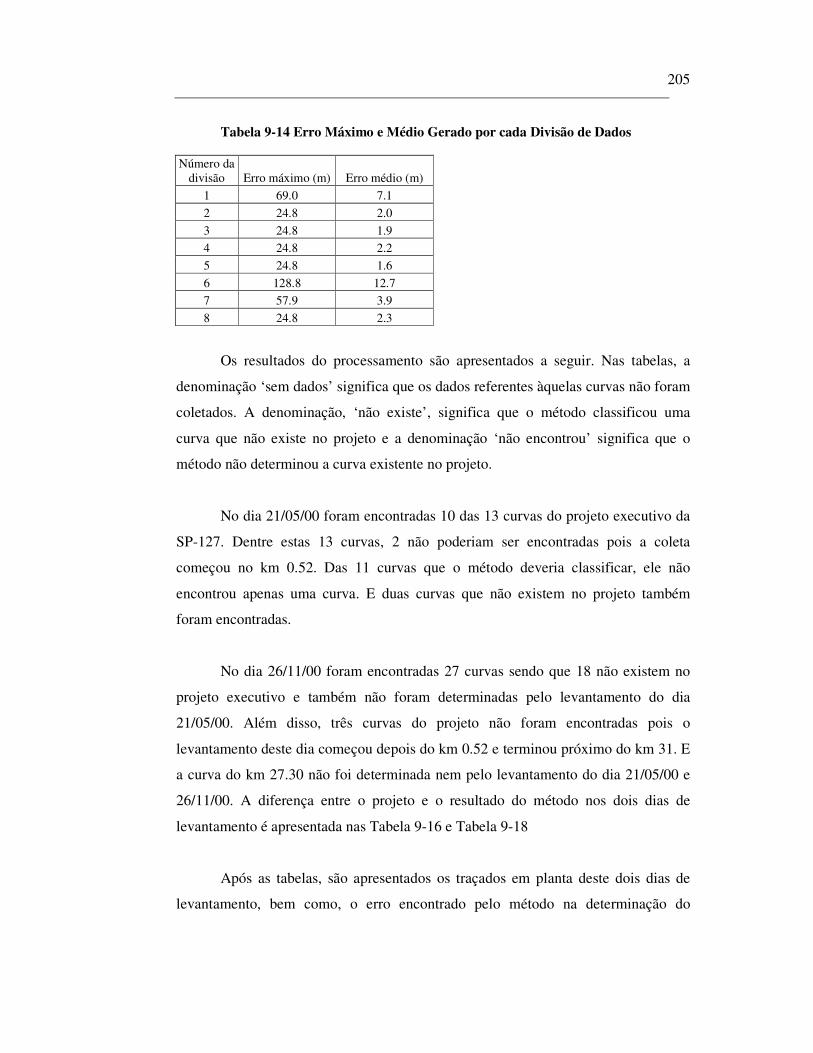
Para o processamento dos dados do dia 21/05/00, foi utilizado um intervalo
de ξ de 0.01 a 0.7 com incremento de 0.02 e os dados foram divididos até oito vezes.
Um fato interessante é que o erro diminuiu e manteve-se constante até a divisão em
cinco partes e depois voltou a crescer com a divisão em 6 partes e reduziu novamente
até o mesmo patamar com a divisão em oito partes (Tabela 9-14). O que pode ter
acontecido é que dividindo mais os dados, foi criado um trecho com mais problemas
que os demais.
205
Tabela 9-14 Erro Máximo e Médio Gerado por cada Divisão de Dados
Número da divisão Erro máximo (m) Erro médio (m)
1 69.0 7.1
2 24.8 2.0
3 24.8 1.9
4 24.8 2.2
5 24.8 1.6
6 128.8 12.7
7 57.9 3.9
8 24.8 2.3
Os resultados do processamento são apresentados a seguir. Nas tabelas, a
denominação ‘sem dados’ significa que os dados referentes àquelas curvas não foram
coletados. A denominação, ‘não existe’, significa que o método classificou uma
curva que não existe no projeto e a denominação ‘não encontrou’ significa que o
método não determinou a curva existente no projeto.
No dia 21/05/00 foram encontradas 10 das 13 curvas do projeto executivo da
SP-127. Dentre estas 13 curvas, 2 não poderiam ser encontradas pois a coleta
começou no km 0.52. Das 11 curvas que o método deveria classificar, ele não
encontrou apenas uma curva. E duas curvas que não existem no projeto também
foram encontradas.
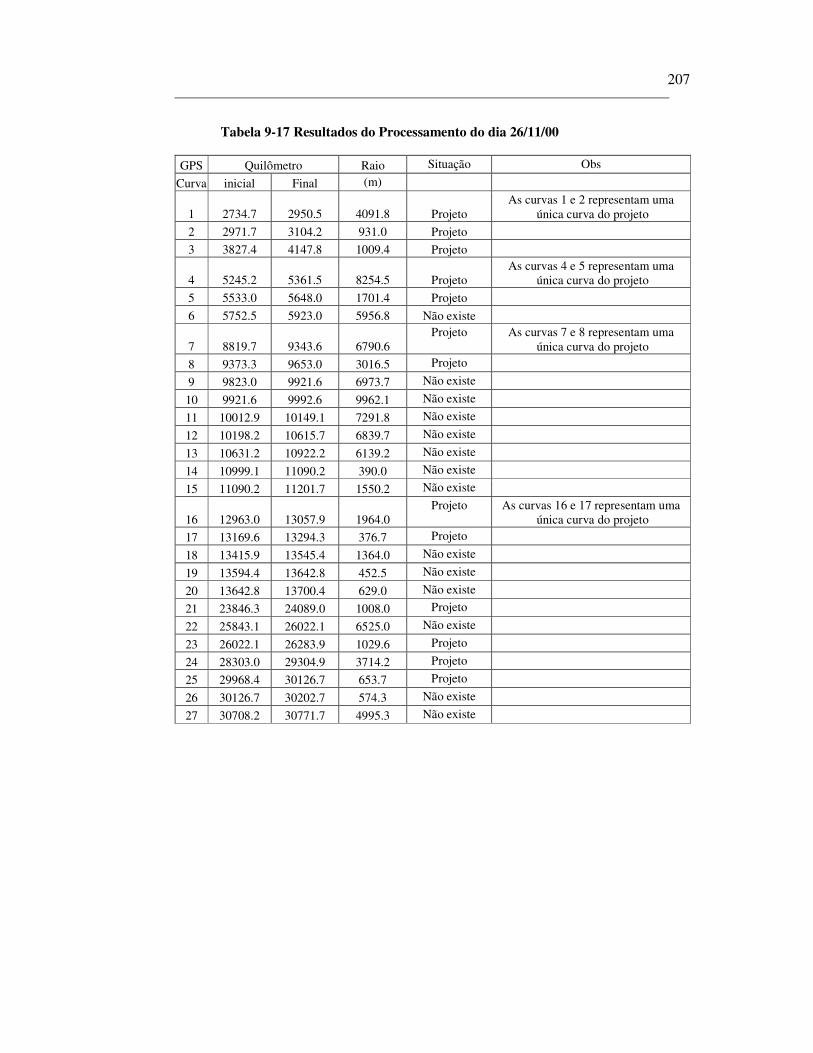
No dia 26/11/00 foram encontradas 27 curvas sendo que 18 não existem no
projeto executivo e também não foram determinadas pelo levantamento do dia
21/05/00. Além disso, três curvas do projeto não foram encontradas pois o
levantamento deste dia começou depois do km 0.52 e terminou próximo do km 31. E
a curva do km 27.30 não foi determinada nem pelo levantamento do dia 21/05/00 e
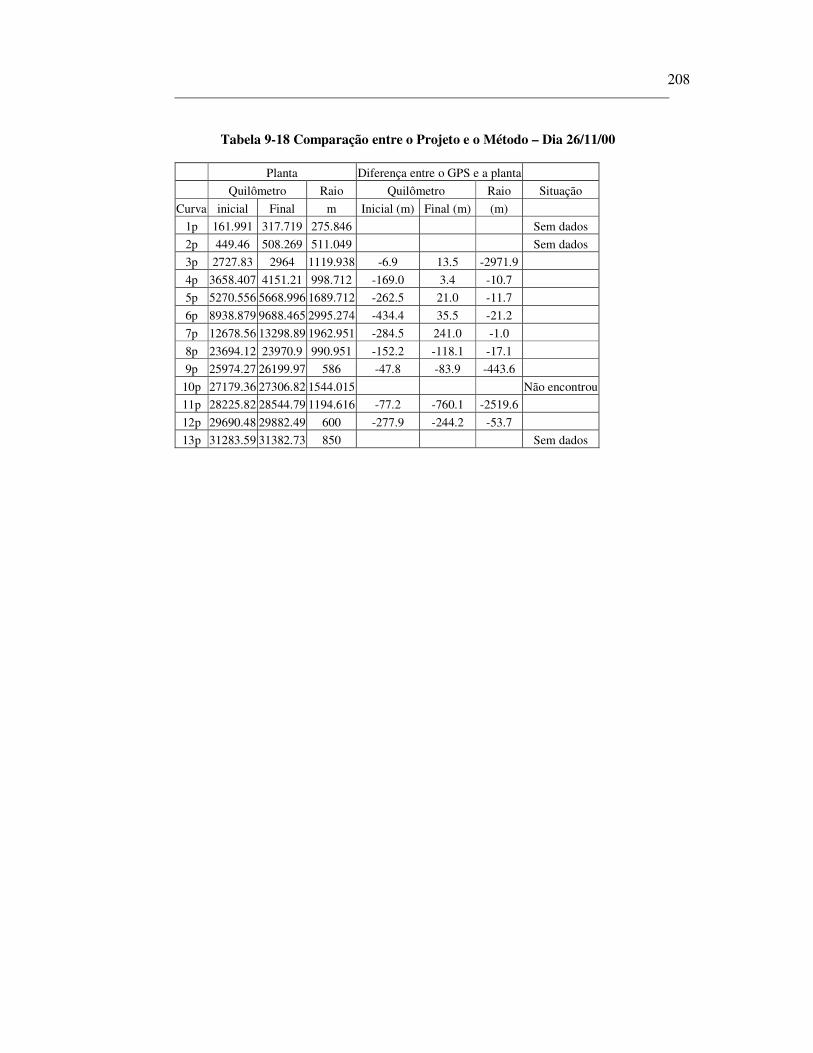
26/11/00. A diferença entre o projeto e o resultado do método nos dois dias de
levantamento é apresentada nas Tabela 9-16 e Tabela 9-18
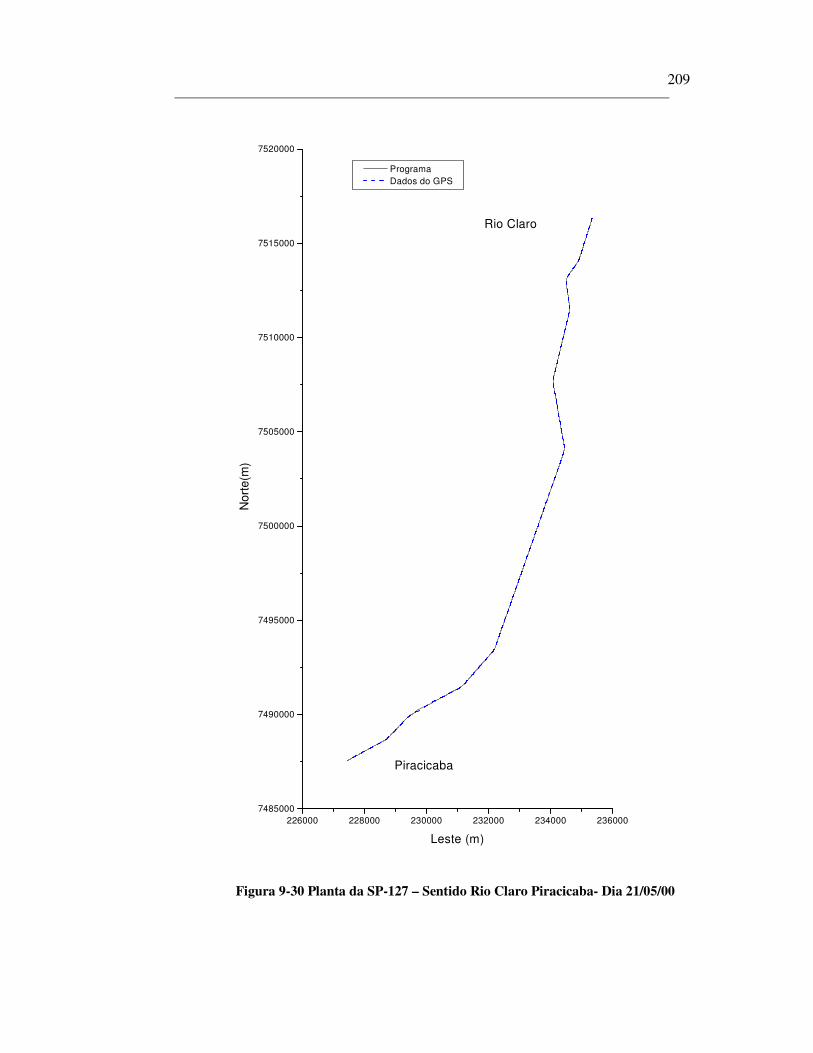
Após as tabelas, são apresentados os traçados em planta deste dois dias de
levantamento, bem como, o erro encontrado pelo método na determinação do
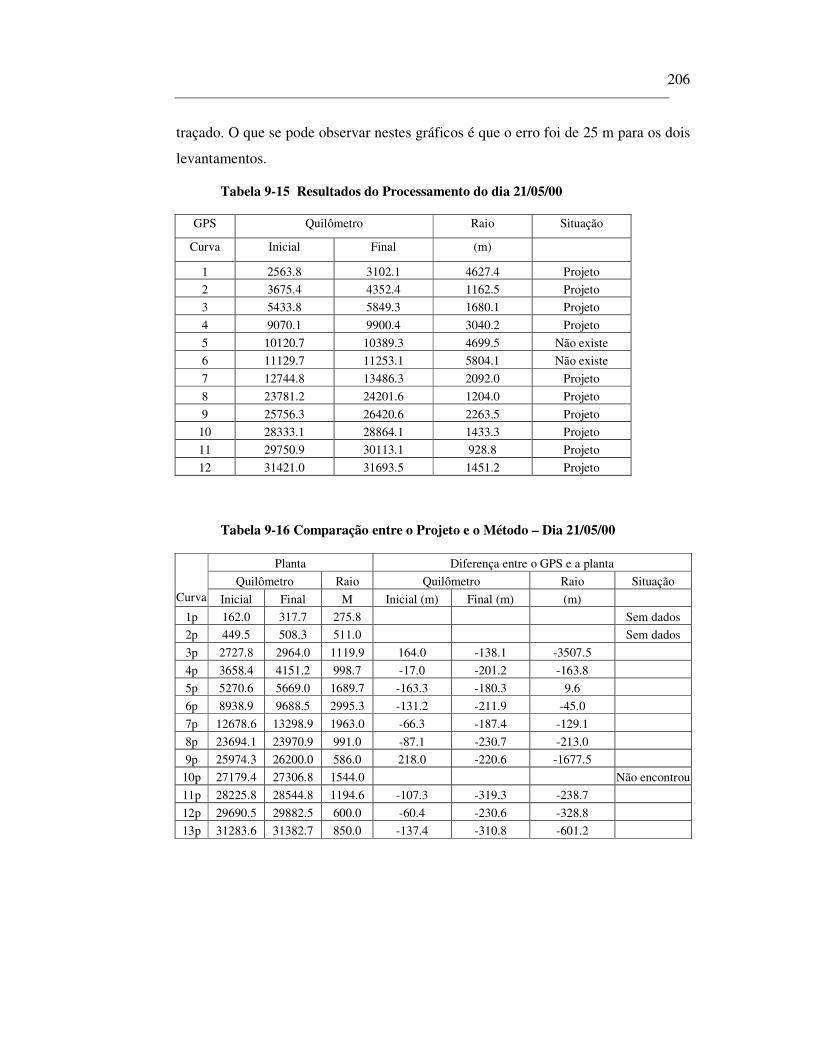
206
traçado. O que se pode observar nestes gráficos é que o erro foi de 25 m para os dois
levantamentos.
Tabela 9-15 Resultados do Processamento do dia 21/05/00
GPS Quilômetro Raio Situação
Curva Inicial Final (m)
1 2563.8 3102.1 4627.4 Projeto
2 3675.4 4352.4 1162.5 Projeto
3 5433.8 5849.3 1680.1 Projeto
4 9070.1 9900.4 3040.2 Projeto
5 10120.7 10389.3 4699.5 Não existe
6 11129.7 11253.1 5804.1 Não existe
7 12744.8 13486.3 2092.0 Projeto
8 23781.2 24201.6 1204.0 Projeto
9 25756.3 26420.6 2263.5 Projeto
10 28333.1 28864.1 1433.3 Projeto
11 29750.9 30113.1 928.8 Projeto
12 31421.0 31693.5 1451.2 Projeto
Tabela 9-16 Comparação entre o Projeto e o Método – Dia 21/05/00
Planta Diferença entre o GPS e a planta
Quilômetro Raio Quilômetro Raio Situação Curva Inicial Final M Inicial (m) Final (m) (m)
1p 162.0 317.7 275.8 Sem dados
2p 449.5 508.3 511.0 Sem dados
3p 2727.8 2964.0 1119.9 164.0 -138.1 -3507.5
4p 3658.4 4151.2 998.7 -17.0 -201.2 -163.8
5p 5270.6 5669.0 1689.7 -163.3 -180.3 9.6
6p 8938.9 9688.5 2995.3 -131.2 -211.9 -45.0
7p 12678.6 13298.9 1963.0 -66.3 -187.4 -129.1
8p 23694.1 23970.9 991.0 -87.1 -230.7 -213.0
9p 25974.3 26200.0 586.0 218.0 -220.6 -1677.5
10p 27179.4 27306.8 1544.0 Não encontrou
11p 28225.8 28544.8 1194.6 -107.3 -319.3 -238.7
12p 29690.5 29882.5 600.0 -60.4 -230.6 -328.8
13p 31283.6 31382.7 850.0 -137.4 -310.8 -601.2
207
Tabela 9-17 Resultados do Processamento do dia 26/11/00
GPS Quilômetro Raio Situação Obs
Curva inicial Final (m)
1 2734.7 2950.5 4091.8 Projeto As curvas 1 e 2 representam uma
única curva do projeto
2 2971.7 3104.2 931.0 Projeto
3 3827.4 4147.8 1009.4 Projeto
4 5245.2 5361.5 8254.5 Projeto As curvas 4 e 5 representam uma
única curva do projeto
5 5533.0 5648.0 1701.4 Projeto
6 5752.5 5923.0 5956.8 Não existe
7 8819.7 9343.6 6790.6 Projeto As curvas 7 e 8 representam uma
única curva do projeto
8 9373.3 9653.0 3016.5 Projeto
9 9823.0 9921.6 6973.7 Não existe
10 9921.6 9992.6 9962.1 Não existe
11 10012.9 10149.1 7291.8 Não existe
12 10198.2 10615.7 6839.7 Não existe
13 10631.2 10922.2 6139.2 Não existe
14 10999.1 11090.2 390.0 Não existe
15 11090.2 11201.7 1550.2 Não existe
16 12963.0 13057.9 1964.0 Projeto As curvas 16 e 17 representam uma
única curva do projeto
17 13169.6 13294.3 376.7 Projeto
18 13415.9 13545.4 1364.0 Não existe
19 13594.4 13642.8 452.5 Não existe
20 13642.8 13700.4 629.0 Não existe
21 23846.3 24089.0 1008.0 Projeto
22 25843.1 26022.1 6525.0 Não existe
23 26022.1 26283.9 1029.6 Projeto
24 28303.0 29304.9 3714.2 Projeto
25 29968.4 30126.7 653.7 Projeto
26 30126.7 30202.7 574.3 Não existe
27 30708.2 30771.7 4995.3 Não existe
208
Tabela 9-18 Comparação entre o Projeto e o Método – Dia 26/11/00
Planta Diferença entre o GPS e a planta
Quilômetro Raio Quilômetro Raio Situação
Curva inicial Final m Inicial (m) Final (m) (m)
1p 161.991 317.719 275.846 Sem dados
2p 449.46 508.269 511.049 Sem dados
3p 2727.83 2964 1119.938 -6.9 13.5 -2971.9
4p 3658.407 4151.21 998.712 -169.0 3.4 -10.7
5p 5270.556 5668.996 1689.712 -262.5 21.0 -11.7
6p 8938.879 9688.465 2995.274 -434.4 35.5 -21.2
7p 12678.56 13298.89 1962.951 -284.5 241.0 -1.0
8p 23694.12 23970.9 990.951 -152.2 -118.1 -17.1
9p 25974.27 26199.97 586 -47.8 -83.9 -443.6
10p 27179.36 27306.82 1544.015 Não encontrou
11p 28225.82 28544.79 1194.616 -77.2 -760.1 -2519.6
12p 29690.48 29882.49 600 -277.9 -244.2 -53.7
13p 31283.59 31382.73 850 Sem dados
209
226000 228000 230000 232000 234000 2360007485000
7490000
7495000
7500000
7505000
7510000
7515000
7520000
Piracicaba
Rio Claro
Programa Dados do GPS
Nor
te(m
)
Leste (m)
Figura 9-30 Planta da SP-127 – Sentido Rio Claro Piracicaba- Dia 21/05/00
210
7485000
7490000
7495000
7500000
7505000
7510000
7515000
7520000
-20 -15 -10 -5 0 5 10 15 20 25
Piracicaba
Rio Claro
Erro (m)
Nor
te (
m)
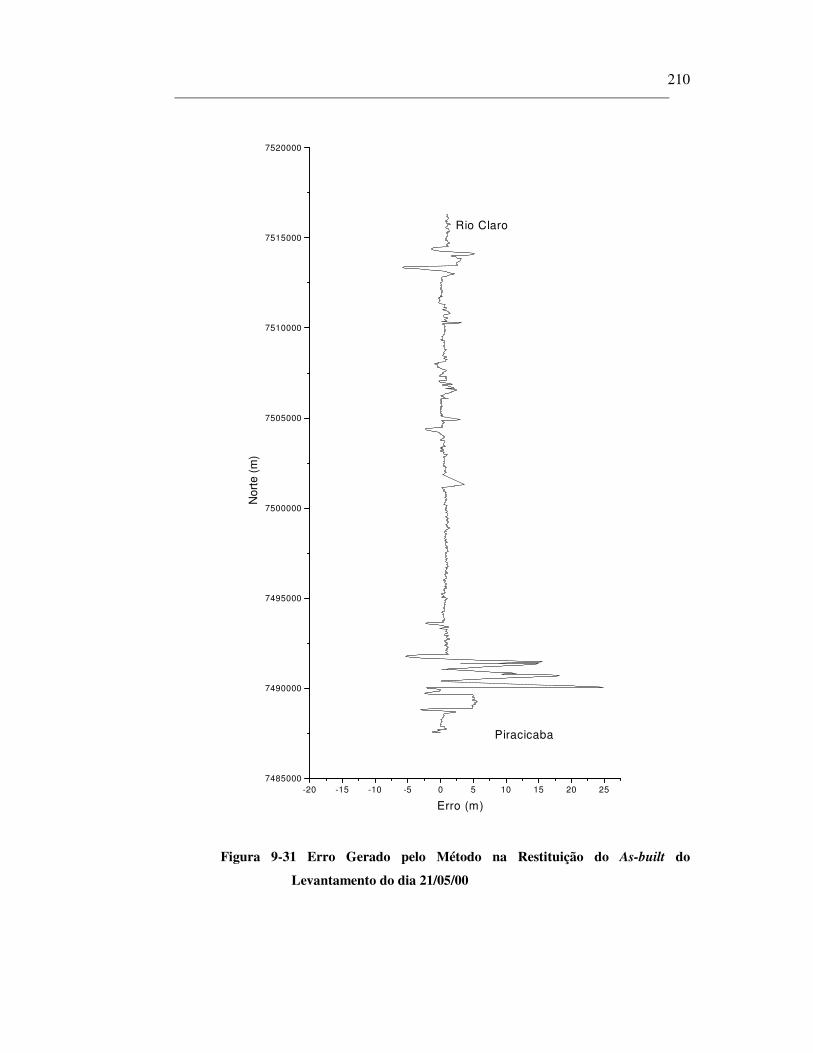
Figura 9-31 Erro Gerado pelo Método na Restituição do As-built do
Levantamento do dia 21/05/00
211
228000 230000 232000 234000 2360007485000
7490000
7495000
7500000
7505000
7510000
7515000
7520000
Piracicaba
Rio Claro Dados do GPS Programa
Nor
te (
m)
Leste (m)
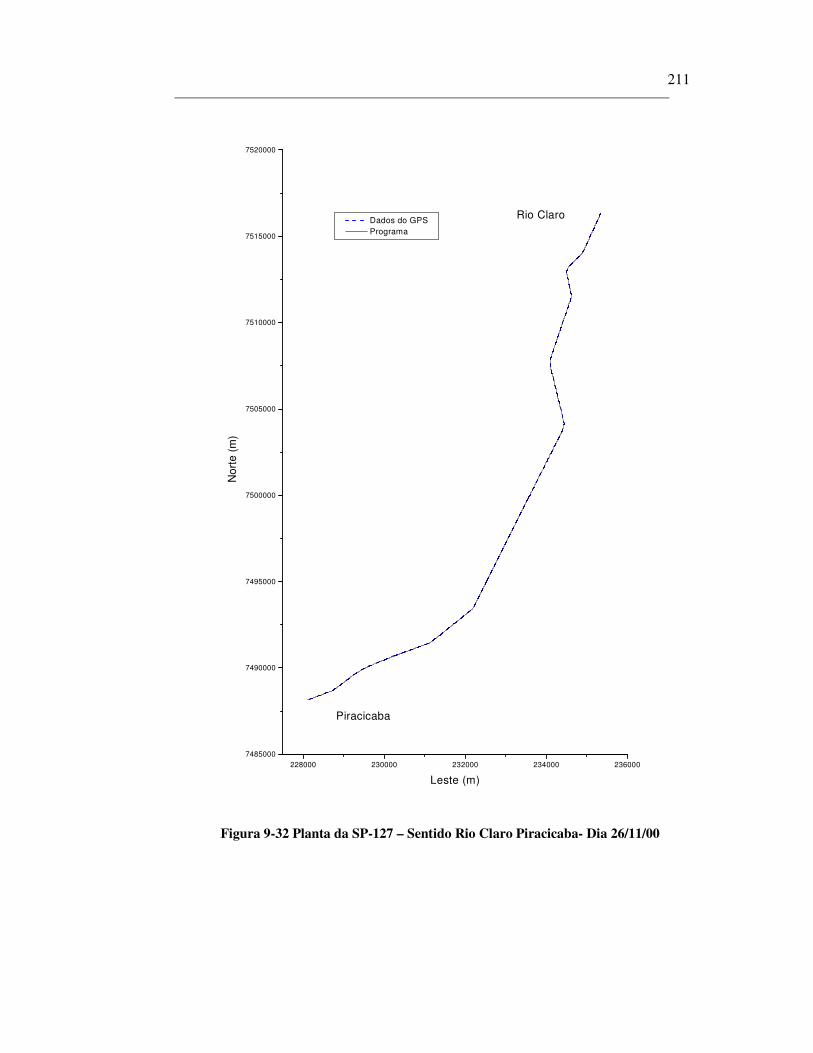
Figura 9-32 Planta da SP-127 – Sentido Rio Claro Piracicaba- Dia 26/11/00
212
7485000
7490000
7495000
7500000
7505000
7510000
7515000
7520000
-15 -10 -5 0 5 10 15 20 25 30
Piracicaba
Rio Claro
Erro (m)
Nor
te (
m)
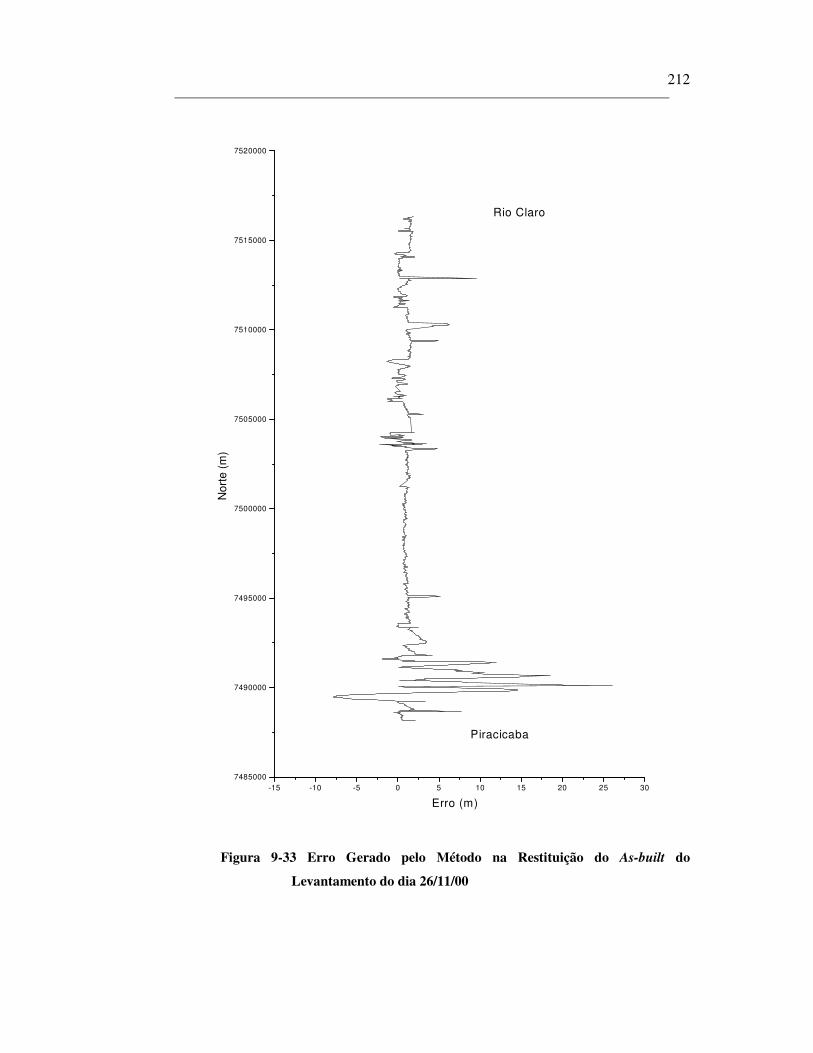
Figura 9-33 Erro Gerado pelo Método na Restituição do As-built do
Levantamento do dia 26/11/00
213
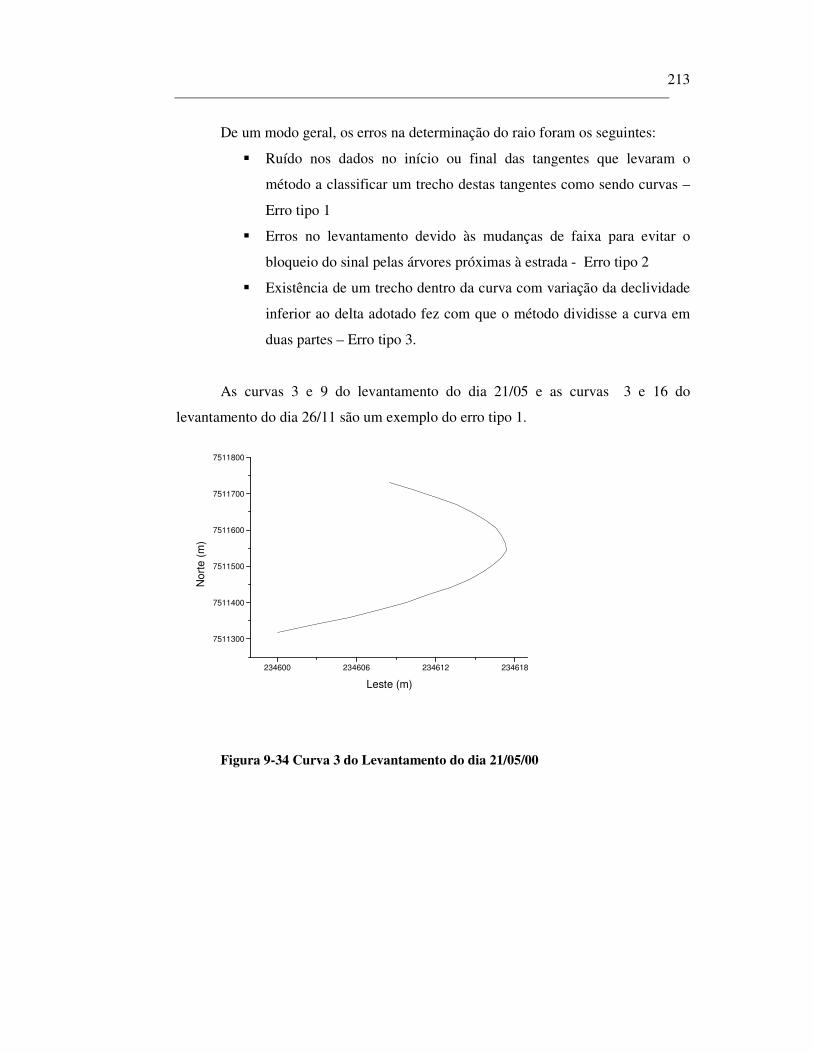
De um modo geral, os erros na determinação do raio foram os seguintes:
� Ruído nos dados no início ou final das tangentes que levaram o
método a classificar um trecho destas tangentes como sendo curvas –
Erro tipo 1
� Erros no levantamento devido às mudanças de faixa para evitar o
bloqueio do sinal pelas árvores próximas à estrada - Erro tipo 2
� Existência de um trecho dentro da curva com variação da declividade
inferior ao delta adotado fez com que o método dividisse a curva em
duas partes – Erro tipo 3.
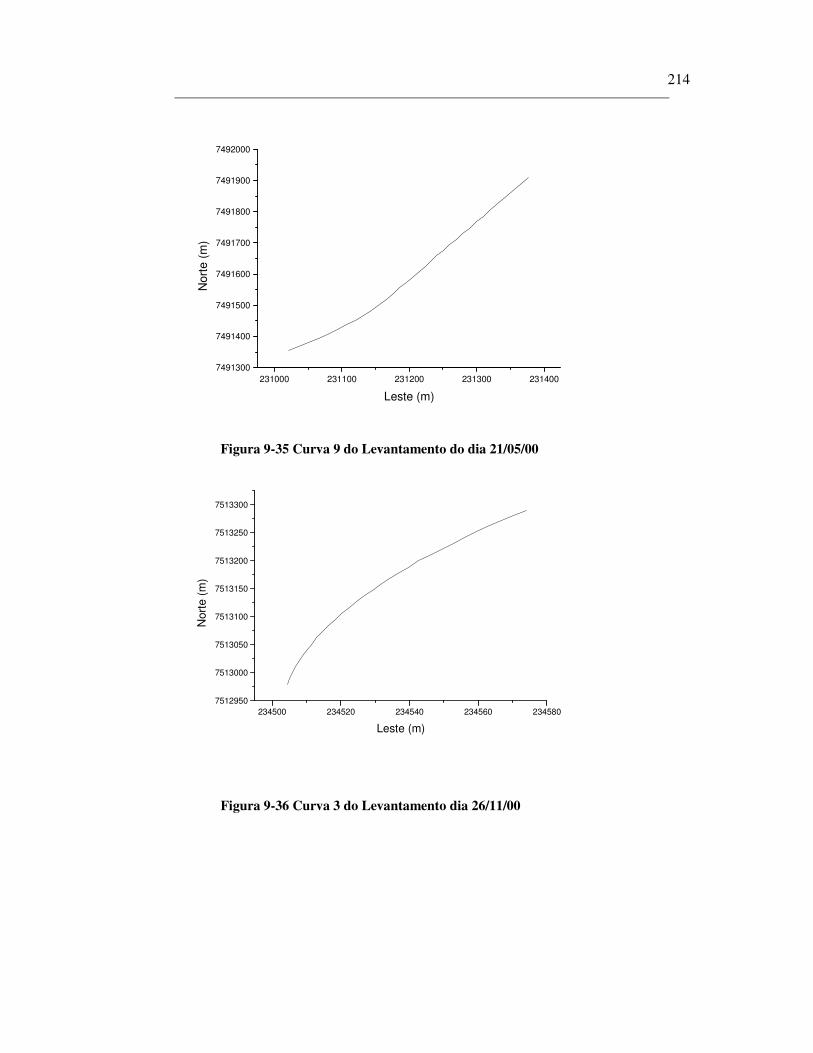
As curvas 3 e 9 do levantamento do dia 21/05 e as curvas 3 e 16 do
levantamento do dia 26/11 são um exemplo do erro tipo 1.
234600 234606 234612 234618
7511300
7511400
7511500
7511600
7511700
7511800
Nor
te (
m)
Leste (m)
Figura 9-34 Curva 3 do Levantamento do dia 21/05/00
214
231000 231100 231200 231300 2314007491300
7491400
7491500
7491600
7491700
7491800
7491900
7492000
Nor
te (
m)
Leste (m)
Figura 9-35 Curva 9 do Levantamento do dia 21/05/00
234500 234520 234540 234560 2345807512950
7513000
7513050
7513100
7513150
7513200
7513250
7513300
Nor
te (
m)
Leste (m)
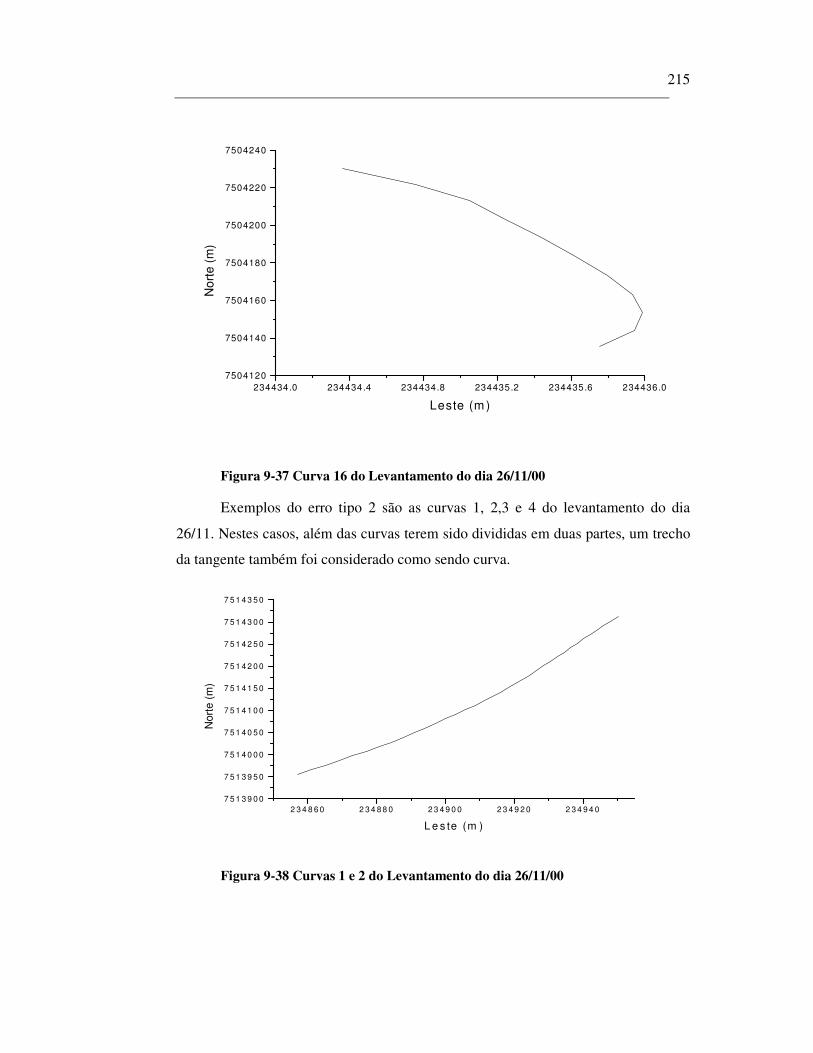
Figura 9-36 Curva 3 do Levantamento dia 26/11/00
215
234434.0 234434.4 234434.8 234435.2 234435.6 234436.07504120
7504140
7504160
7504180
7504200
7504220
7504240
Nor
te (
m)
Leste (m )
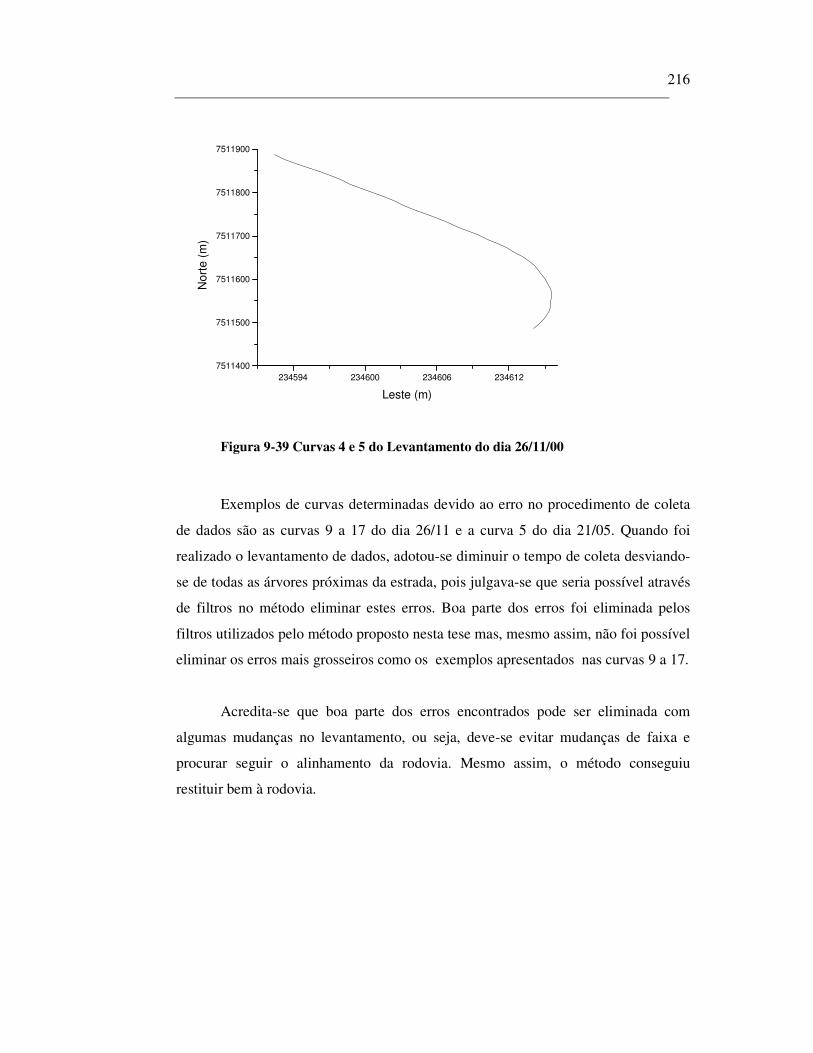
Figura 9-37 Curva 16 do Levantamento do dia 26/11/00
Exemplos do erro tipo 2 são as curvas 1, 2,3 e 4 do levantamento do dia
26/11. Nestes casos, além das curvas terem sido divididas em duas partes, um trecho
da tangente também foi considerado como sendo curva.
2 3 4 8 6 0 2 3 4 8 8 0 2 3 4 9 0 0 2 3 4 9 2 0 2 3 4 9 4 07 5 1 3 9 0 0
7 5 1 3 9 5 0
7 5 1 4 0 0 0
7 5 1 4 0 5 0
7 5 1 4 1 0 0
7 5 1 4 1 5 0
7 5 1 4 2 0 0
7 5 1 4 2 5 0
7 5 1 4 3 0 0
7 5 1 4 3 5 0
Nor
te (
m)
L e s te (m )
Figura 9-38 Curvas 1 e 2 do Levantamento do dia 26/11/00
216
234594 234600 234606 2346127511400
7511500
7511600
7511700
7511800
7511900
Nor
te (
m)
Leste (m)
Figura 9-39 Curvas 4 e 5 do Levantamento do dia 26/11/00
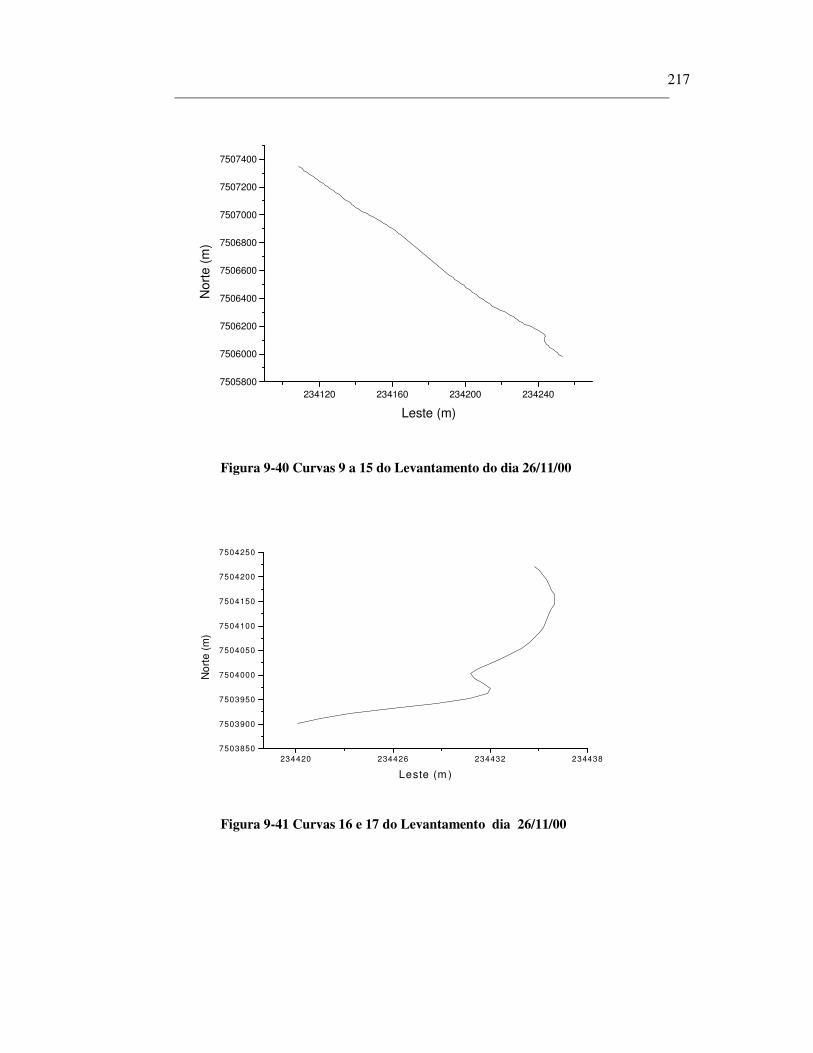
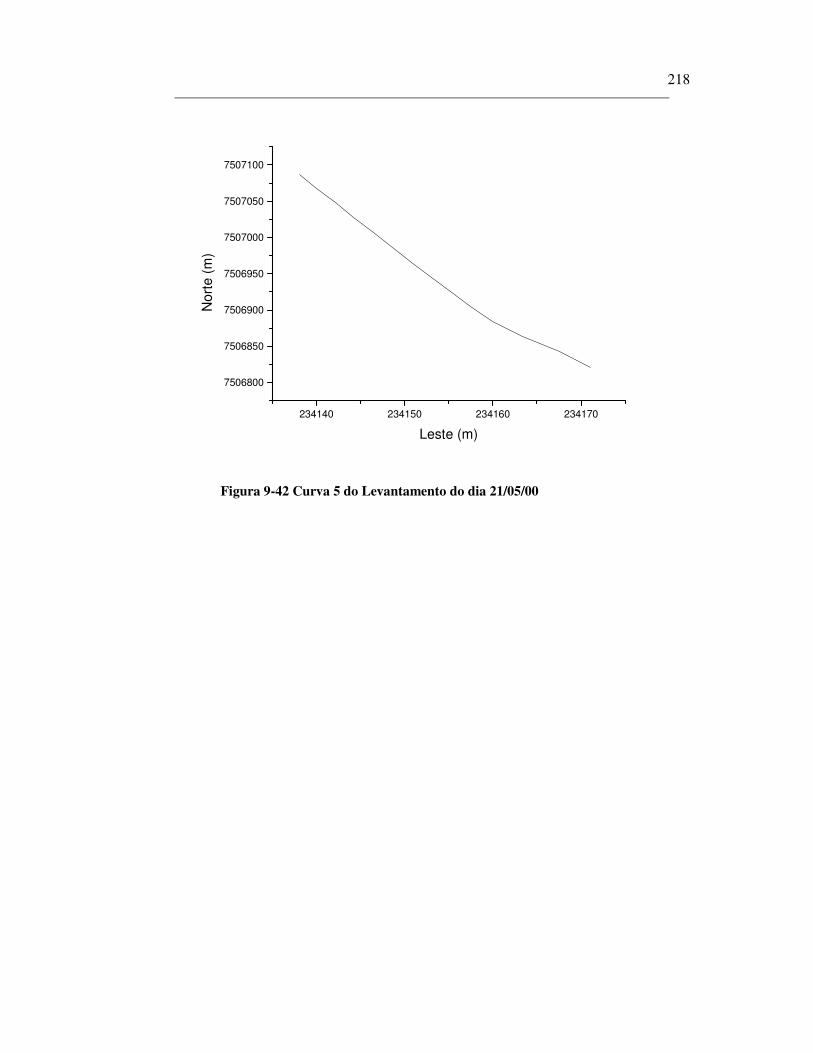
Exemplos de curvas determinadas devido ao erro no procedimento de coleta
de dados são as curvas 9 a 17 do dia 26/11 e a curva 5 do dia 21/05. Quando foi
realizado o levantamento de dados, adotou-se diminuir o tempo de coleta desviando-
se de todas as árvores próximas da estrada, pois julgava-se que seria possível através
de filtros no método eliminar estes erros. Boa parte dos erros foi eliminada pelos
filtros utilizados pelo método proposto nesta tese mas, mesmo assim, não foi possível
eliminar os erros mais grosseiros como os exemplos apresentados nas curvas 9 a 17.
Acredita-se que boa parte dos erros encontrados pode ser eliminada com
algumas mudanças no levantamento, ou seja, deve-se evitar mudanças de faixa e
procurar seguir o alinhamento da rodovia. Mesmo assim, o método conseguiu
restituir bem à rodovia.
217
234120 234160 234200 2342407505800
7506000
7506200
7506400
7506600
7506800
7507000
7507200
7507400
Nor
te (
m)
Leste (m)
Figura 9-40 Curvas 9 a 15 do Levantamento do dia 26/11/00
234420 234426 234432 2344387503850
7503900
7503950
7504000
7504050
7504100
7504150
7504200
7504250
Nor
te (
m)
Leste (m )
Figura 9-41 Curvas 16 e 17 do Levantamento dia 26/11/00
218
234140 234150 234160 234170
7506800
7506850
7506900
7506950
7507000
7507050
7507100
Nor
te (
m)
Leste (m)
Figura 9-42 Curva 5 do Levantamento do dia 21/05/00
10 APLICAÇÃO DO MÉTODO NA ANÁLISE DE ACIDENTES
Os dados de acidentes da SP-127 disponíveis nesta tese são de 1991 a 1995,
período anterior à duplicação da rodovia. Desta forma, para análise de acidentes, só
seria possível utilizar o levantamento de 1997. Mas, como neste levantamento o
espaçamento entre pontos é de 100 m, os erros na determinação do traçado em perfil
vertical e planta foram altos.
Como a pista no sentido Piracicaba-Rio Claro corresponde à pista antiga que
não foi modificada a não ser por alguns acessos e interseções, foram utilizados nesta
análise os resultados do dia 26/10/2000 com espaçamento de 10m. Todos os
levantamentos foram processados e como não existe uma diferença significativa
entre eles, optou-se por analisar somente este dia.
10.1 Descrição dos Elementos em Planta
O erro no traçado em planta encontrado pelo método foi abaixo de 20 m. Da
mesma forma que o levantamento do dia 26/11/0, o procedimento do levantamento
interferiu razoavelmente nos resultados. No dia 26/10/2000, foram determinadas 29
curvas horizontais.
Para facilitar as análises, optou-se por utilizar os dados do projeto no sentido
Rio Claro – Piracicaba pois os traçados das duas pistas são praticamente iguais e os
resultados do GPS estão próximos do projeto. A Figura 10-1 apresenta o traçado em
planta obtido pelo método e os raios do projeto executivo.

220
226000 228000 230000 232000 234000 2360007485000
7490000
7495000
7500000
7505000
7510000
7515000
7520000
Rio Claro
Piracicaba
590
9901960
1200
600
3000
1690
1000
1200
Nor
te (
m)
Leste (m)
Figura 10-1 Planta no Sentido Piracicaba-Rio Claro e os Raios Obtidos Através
do Método de Separação Proposto
221
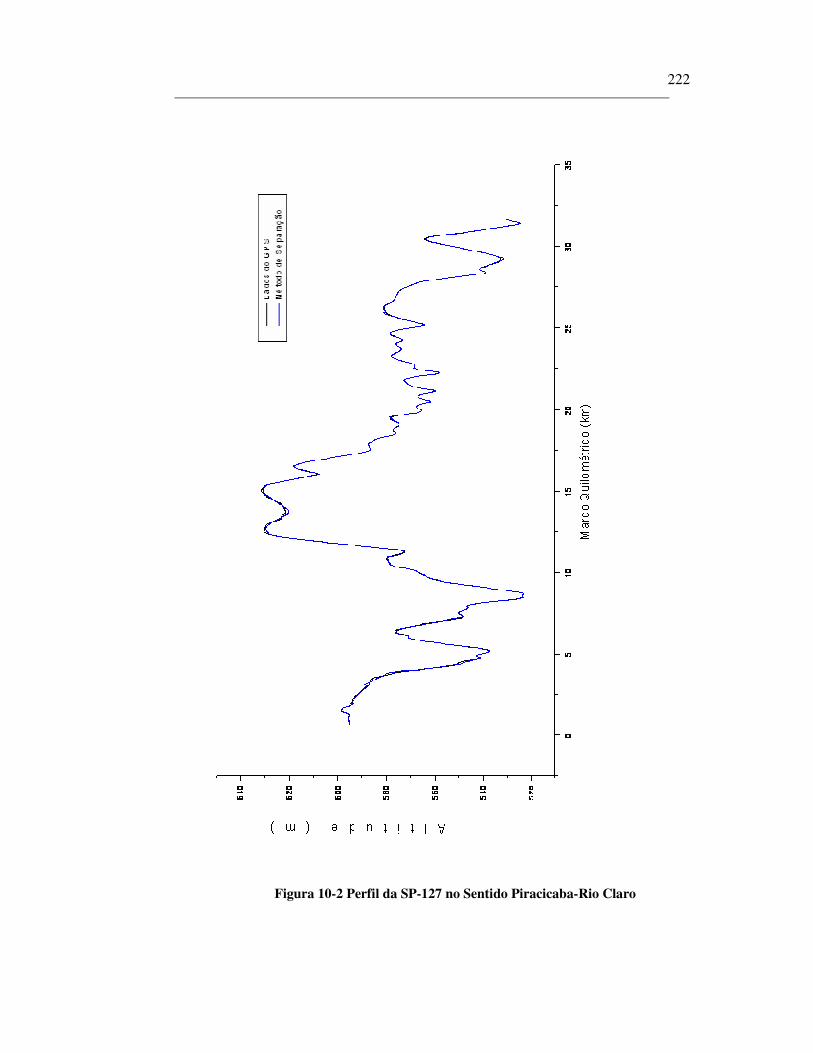
10.2 Descrição dos Elementos em Perfil
Da mesma forma que o levantamento no sentido Rio Claro –Piracicaba, o erro
na determinação do perfil foi inferior a 1.5 m. O resultado é apresentado na Figura
10-2. Todas estas informações foram incorporadas no TRANSCAD.
10.3 Descrição das Características Geométricas Relevantes no TRANSCAD
Conforme foi explicado no capítulo 3, as informações dos diversos bancos de
dados podem ser unidas através do Transcad. Com o levantamento GPS foi possível
montar um arquivo de linha que é a base para a união de todos os dados. Através de
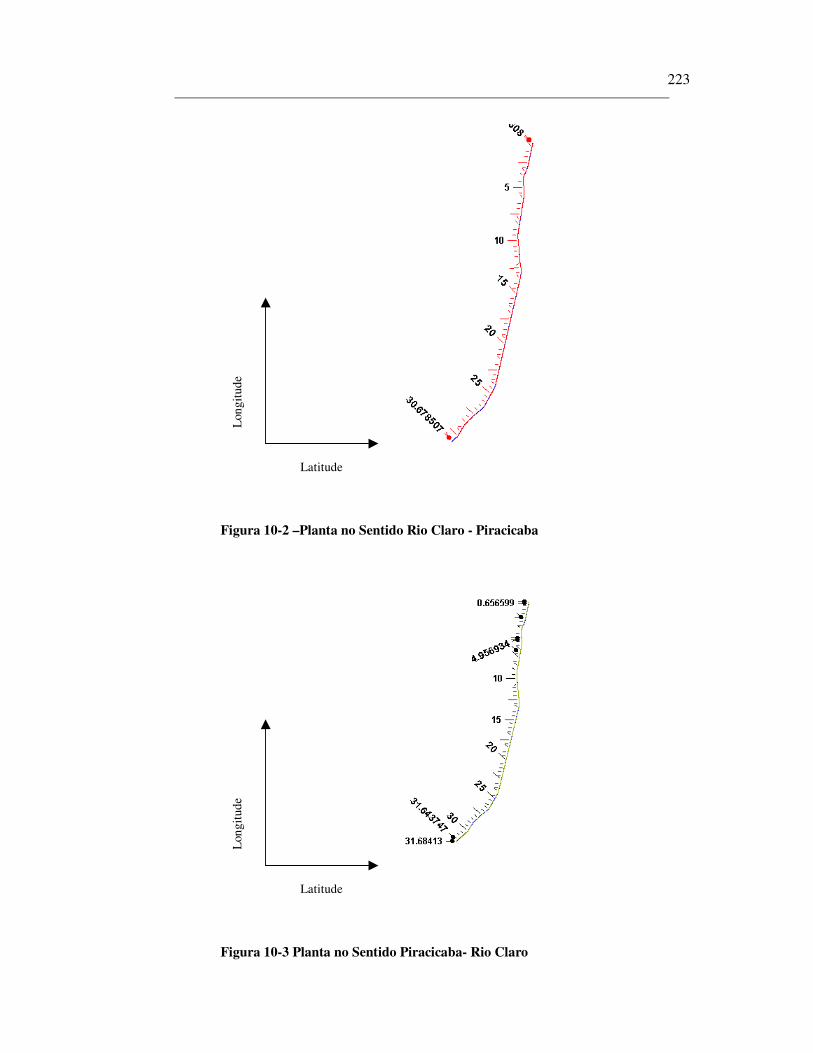
uma ferramenta do Transcad, denominada segmentação dinâmica, foi determinada a
quilometragem ao longo da rodovia nos dois sentidos (Figura 10-3 e Figura 10-4).
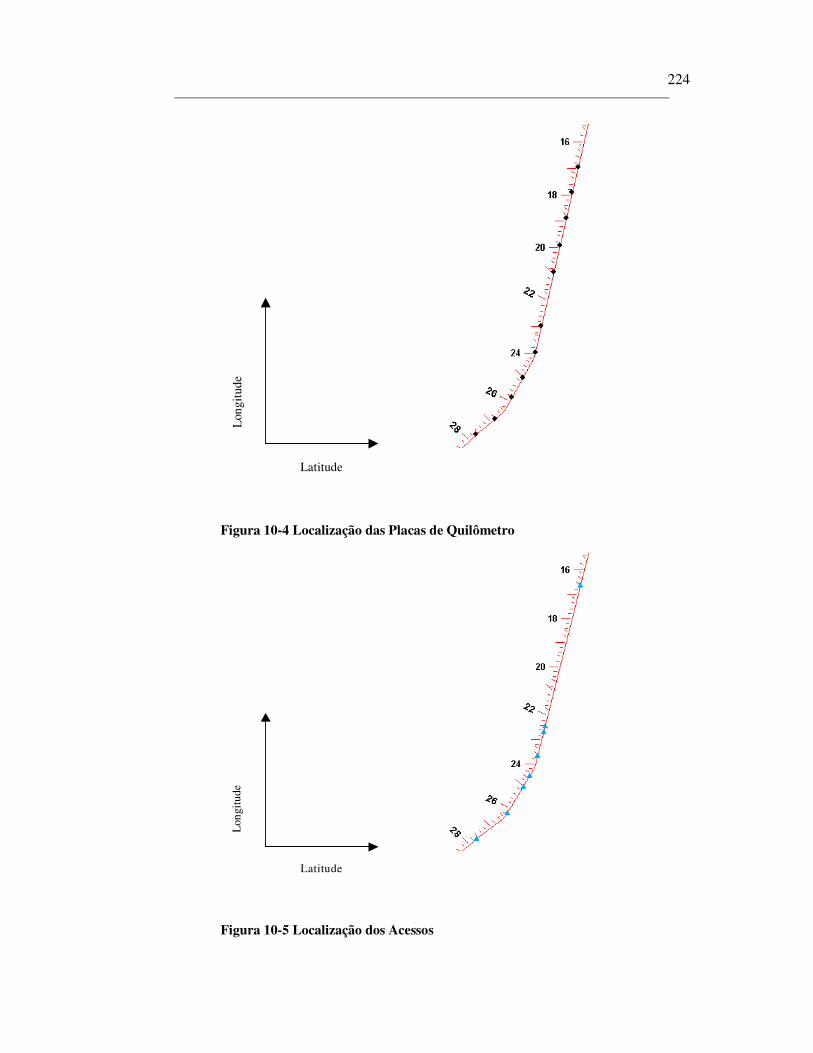
A partir desta base geográfica, foi possível associar as outras informações
através da quilometragem, permitindo assim, visualizar as placas de quilômetro
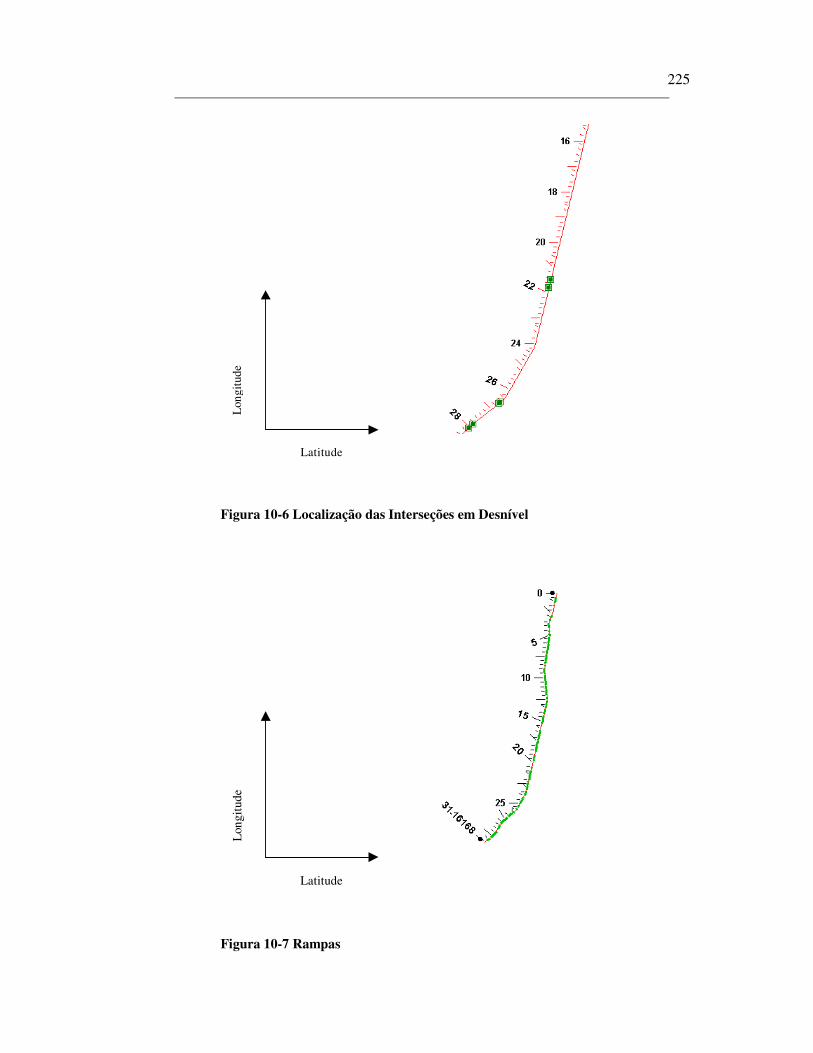
(Figura 10-5), a localização dos acessos (Figura 10-6) e a localização das interseções
em desnível (Figura 10-7).
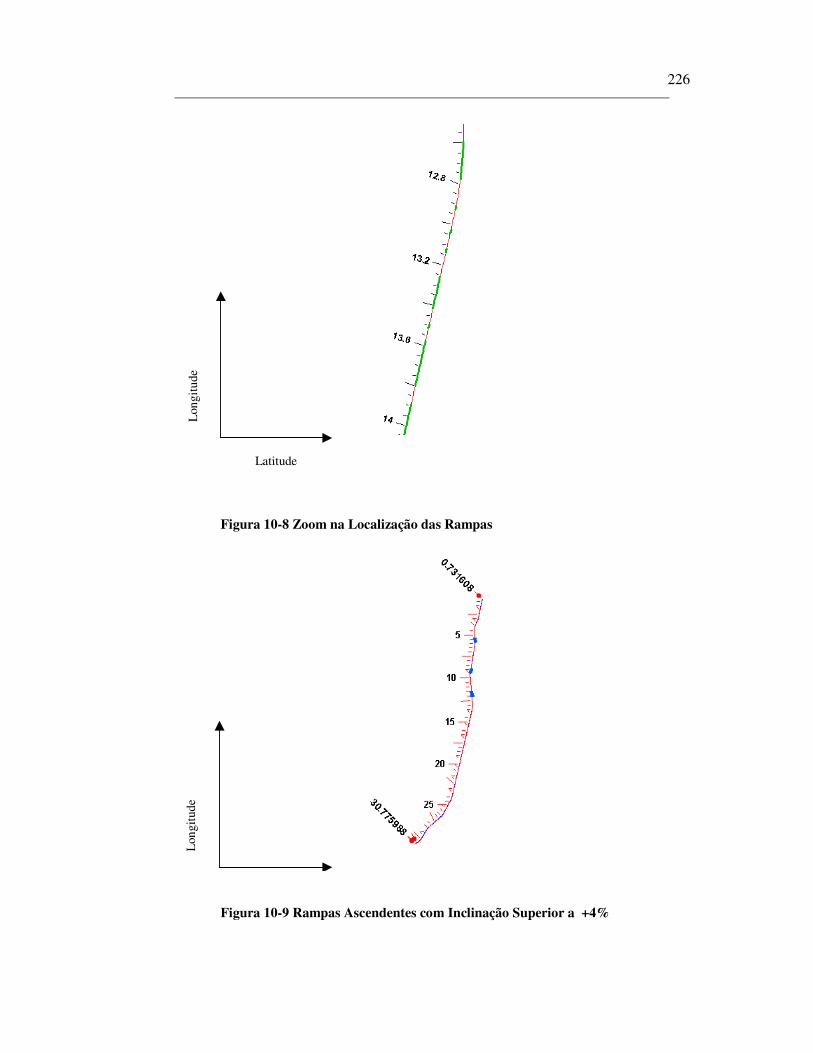
Os arquivos sobre geometria resultantes do método de separação também
foram unidos à rodovia. Sendo assim foi possível verificar onde se localizam as
rampas (Figura 10-8 e Figura 10-9) ou quais são as rampas com inclinação superior a
4% (Figura 10-10).
222
Figura 10-2 Perfil da SP-127 no Sentido Piracicaba-Rio Claro
223
Latitude
Lon
gitu
de
Figura 10-2 –Planta no Sentido Rio Claro - Piracicaba
Latitude
Lon
gitu
de
Figura 10-3 Planta no Sentido Piracicaba- Rio Claro
224
Latitude
Lon
gitu
de
Figura 10-4 Localização das Placas de Quilômetro
Latitude
Lon
gitu
de
Figura 10-5 Localização dos Acessos
225
Latitude
Lon
gitu
de
Figura 10-6 Localização das Interseções em Desnível
Latitude
Lon
gitu
de
Figura 10-7 Rampas
226
Latitude
Lon
gitu
de
Figura 10-8 Zoom na Localização das Rampas
Lon
gitu
de
Figura 10-9 Rampas Ascendentes com Inclinação Superior a +4%
227
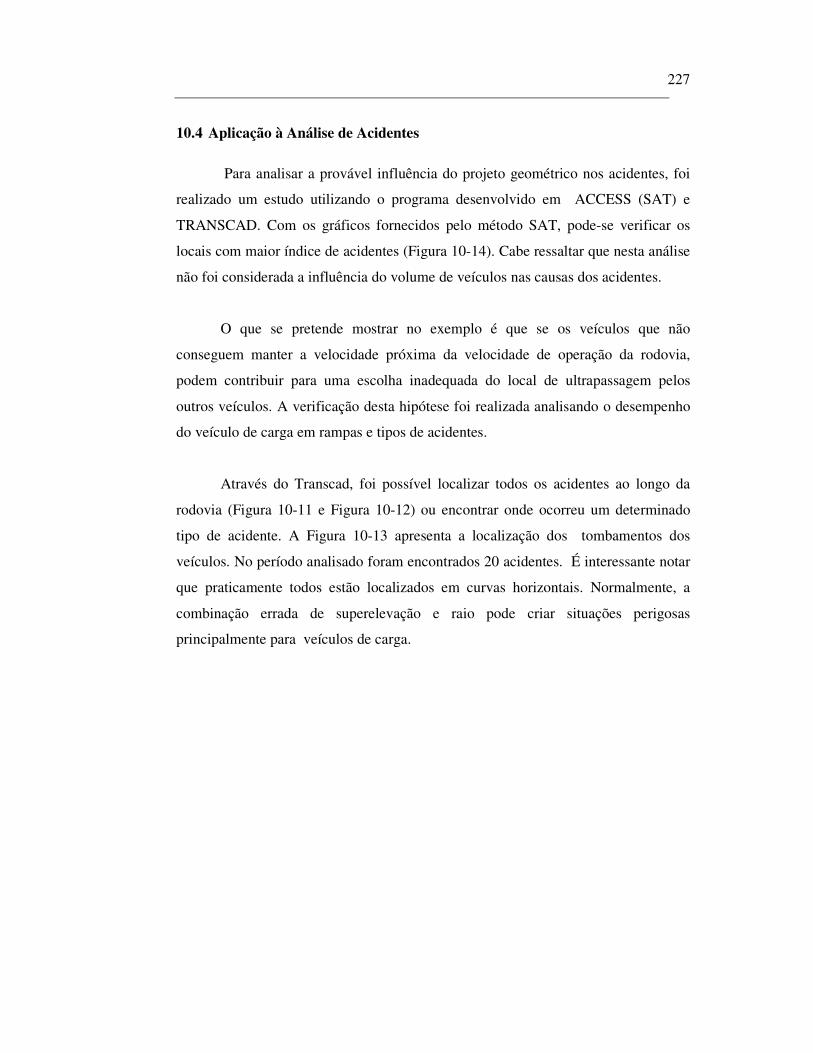
10.4 Aplicação à Análise de Acidentes
Para analisar a provável influência do projeto geométrico nos acidentes, foi
realizado um estudo utilizando o programa desenvolvido em ACCESS (SAT) e
TRANSCAD. Com os gráficos fornecidos pelo método SAT, pode-se verificar os
locais com maior índice de acidentes (Figura 10-14). Cabe ressaltar que nesta análise
não foi considerada a influência do volume de veículos nas causas dos acidentes.
O que se pretende mostrar no exemplo é que se os veículos que não
conseguem manter a velocidade próxima da velocidade de operação da rodovia,
podem contribuir para uma escolha inadequada do local de ultrapassagem pelos
outros veículos. A verificação desta hipótese foi realizada analisando o desempenho
do veículo de carga em rampas e tipos de acidentes.
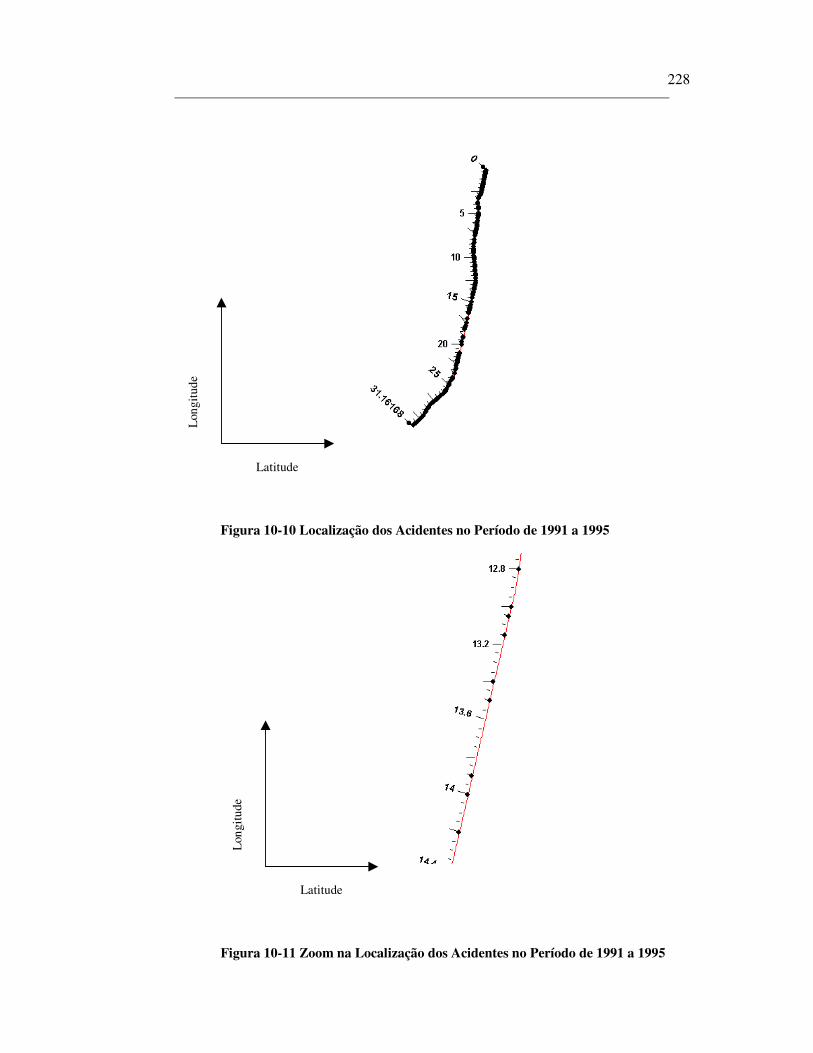
Através do Transcad, foi possível localizar todos os acidentes ao longo da
rodovia (Figura 10-11 e Figura 10-12) ou encontrar onde ocorreu um determinado
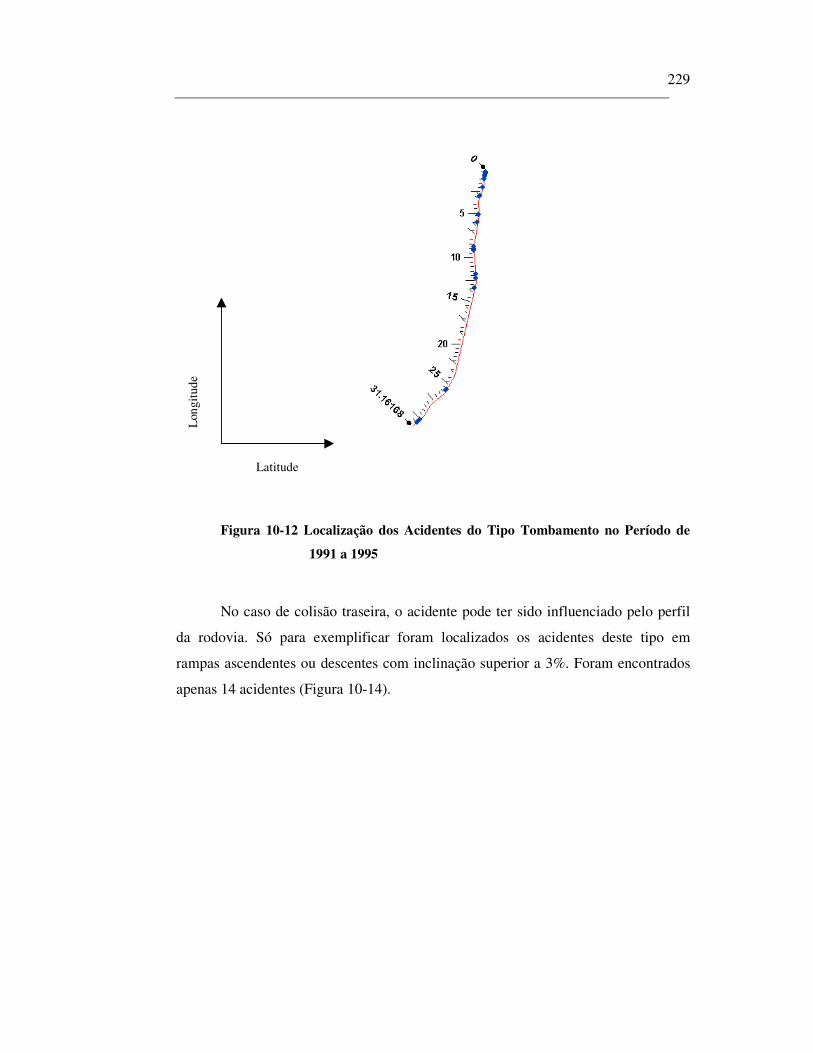
tipo de acidente. A Figura 10-13 apresenta a localização dos tombamentos dos
veículos. No período analisado foram encontrados 20 acidentes. É interessante notar
que praticamente todos estão localizados em curvas horizontais. Normalmente, a
combinação errada de superelevação e raio pode criar situações perigosas
principalmente para veículos de carga.
228
Latitude
Lon
gitu
de
Figura 10-10 Localização dos Acidentes no Período de 1991 a 1995
Latitude
Lon
gitu
de
Figura 10-11 Zoom na Localização dos Acidentes no Período de 1991 a 1995
229
Latitude
Lon
gitu
de
Figura 10-12 Localização dos Acidentes do Tipo Tombamento no Período de
1991 a 1995
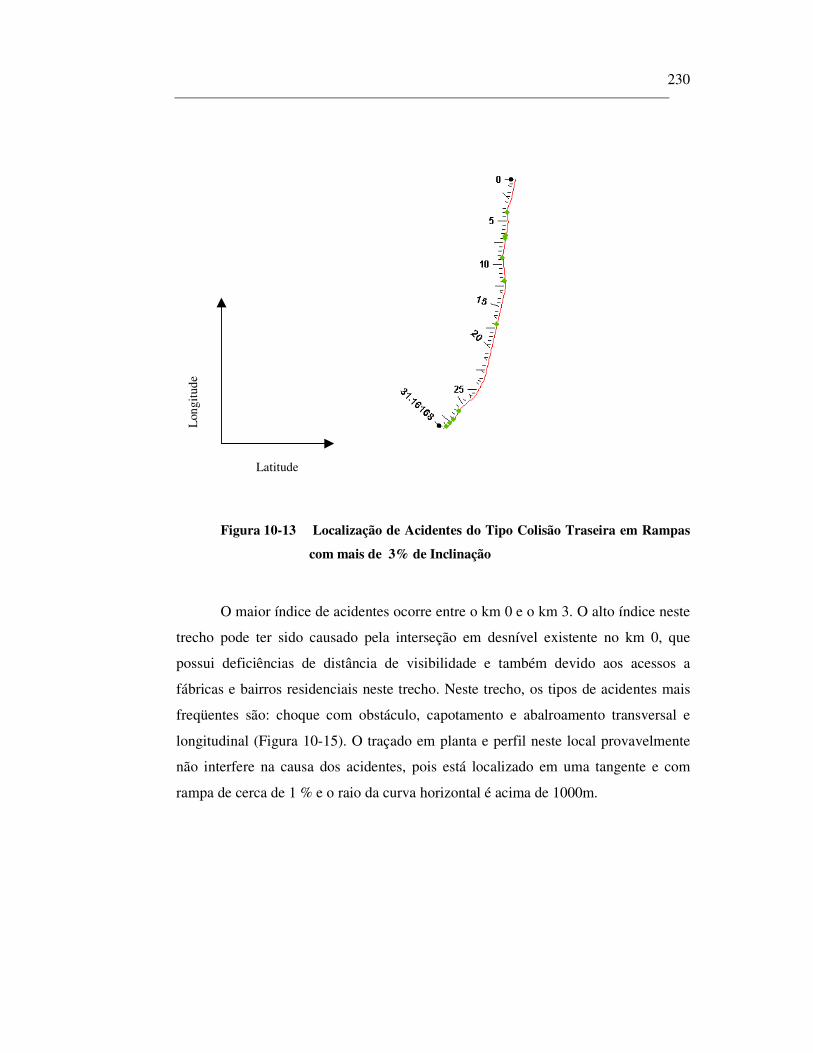
No caso de colisão traseira, o acidente pode ter sido influenciado pelo perfil
da rodovia. Só para exemplificar foram localizados os acidentes deste tipo em
rampas ascendentes ou descentes com inclinação superior a 3%. Foram encontrados
apenas 14 acidentes (Figura 10-14).
230
Latitude
Lon
gitu
de
Figura 10-13 Localização de Acidentes do Tipo Colisão Traseira em Rampas
com mais de 3% de Inclinação
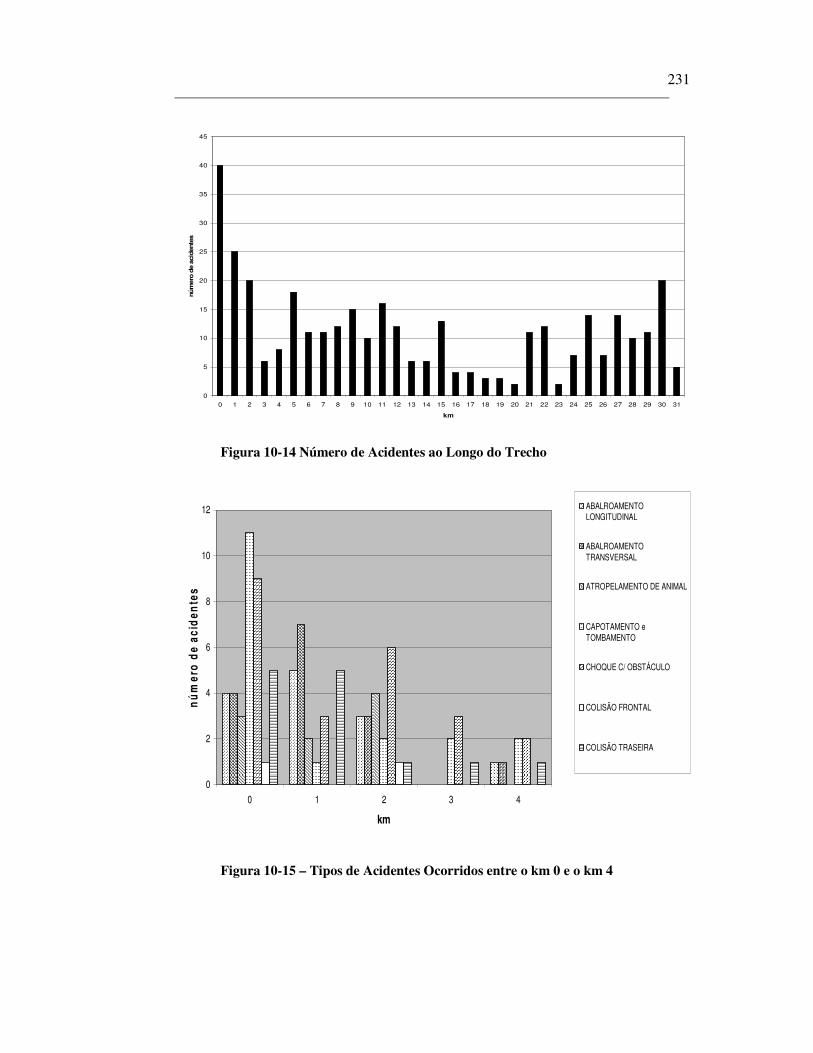
O maior índice de acidentes ocorre entre o km 0 e o km 3. O alto índice neste
trecho pode ter sido causado pela interseção em desnível existente no km 0, que
possui deficiências de distância de visibilidade e também devido aos acessos a
fábricas e bairros residenciais neste trecho. Neste trecho, os tipos de acidentes mais
freqüentes são: choque com obstáculo, capotamento e abalroamento transversal e
longitudinal (Figura 10-15). O traçado em planta e perfil neste local provavelmente
não interfere na causa dos acidentes, pois está localizado em uma tangente e com
rampa de cerca de 1 % e o raio da curva horizontal é acima de 1000m.
231
0
5
10
15
20
25
30
35
40
45
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
km
núm
ero
de a
cid
ente
s
Figura 10-14 Número de Acidentes ao Longo do Trecho
0
2
4
6
8
10
12
0 1 2 3 4
km
nú
me
ro d
e a
cid
en
tes
ABALROAMENTOLONGITUDINAL
ABALROAMENTOTRANSVERSAL
ATROPELAMENTO DE ANIMAL
CAPOTAMENTO eTOMBAMENTO
CHOQUE C/ OBSTÁCULO
COLISÃO FRONTAL
COLISÃO TRASEIRA
Figura 10-15 – Tipos de Acidentes Ocorridos entre o km 0 e o km 4
232
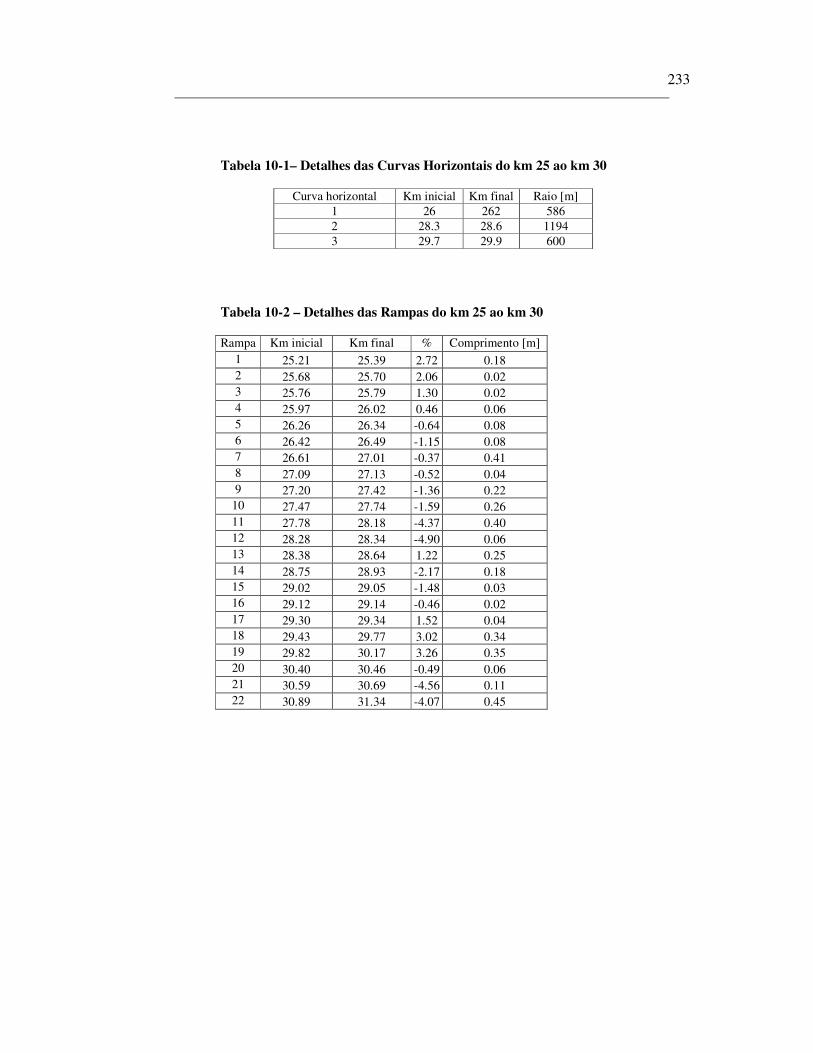
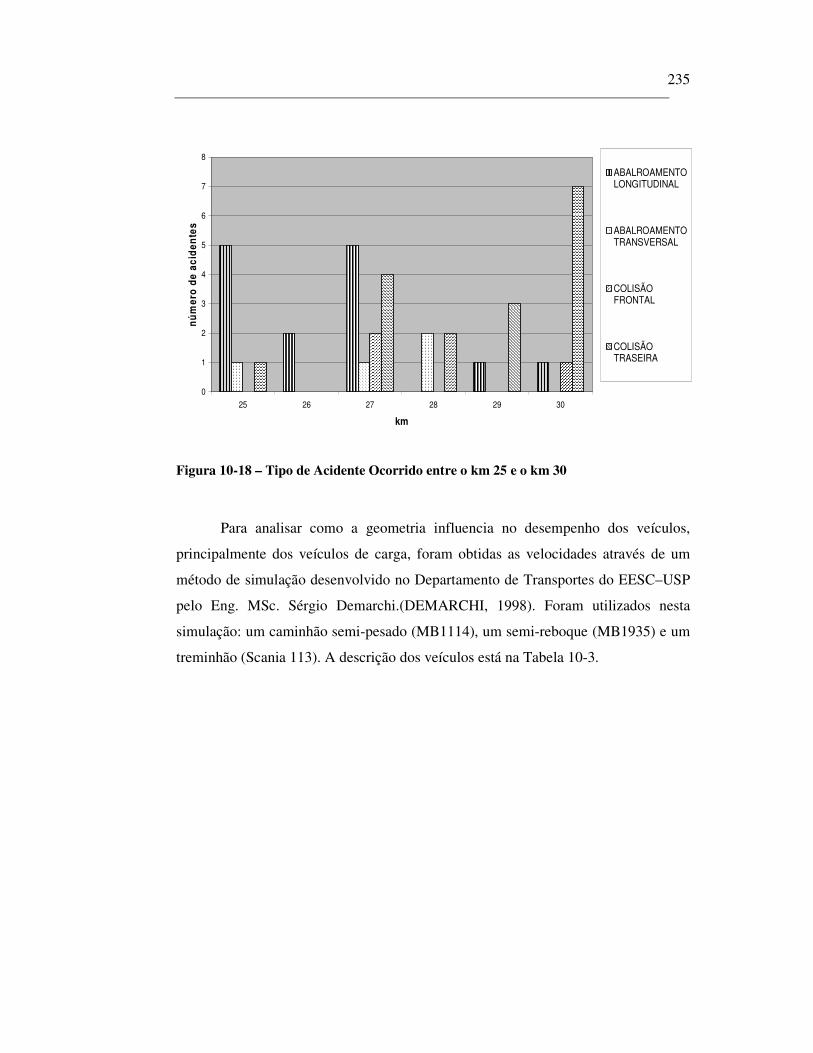
Outro segmento escolhido para análise foi o trecho compreendido entre o km
25 e o km 31. A descrição do trecho está apresentada nas Tabelas 10-1 e 10-2 e nas
Figuras 10-17 e 10-18. Através da análise dos tipos de acidentes (ver Figura 10-18)
verifica-se que os acidentes mais frequentes são colisão traseira e abalroamento
longitudinal. Geralmente, estes acidentes são causados por erro de julgamento do
motorista do veículo mais veloz na determinação da velocidade do veículo que está
trafegando à sua frente na mesma direção ou em direção oposta. Este fato permite
estabelecer a hipótese que a condição geométrica da via constitui um fator
concorrente para a ocorrência dos acidentes.
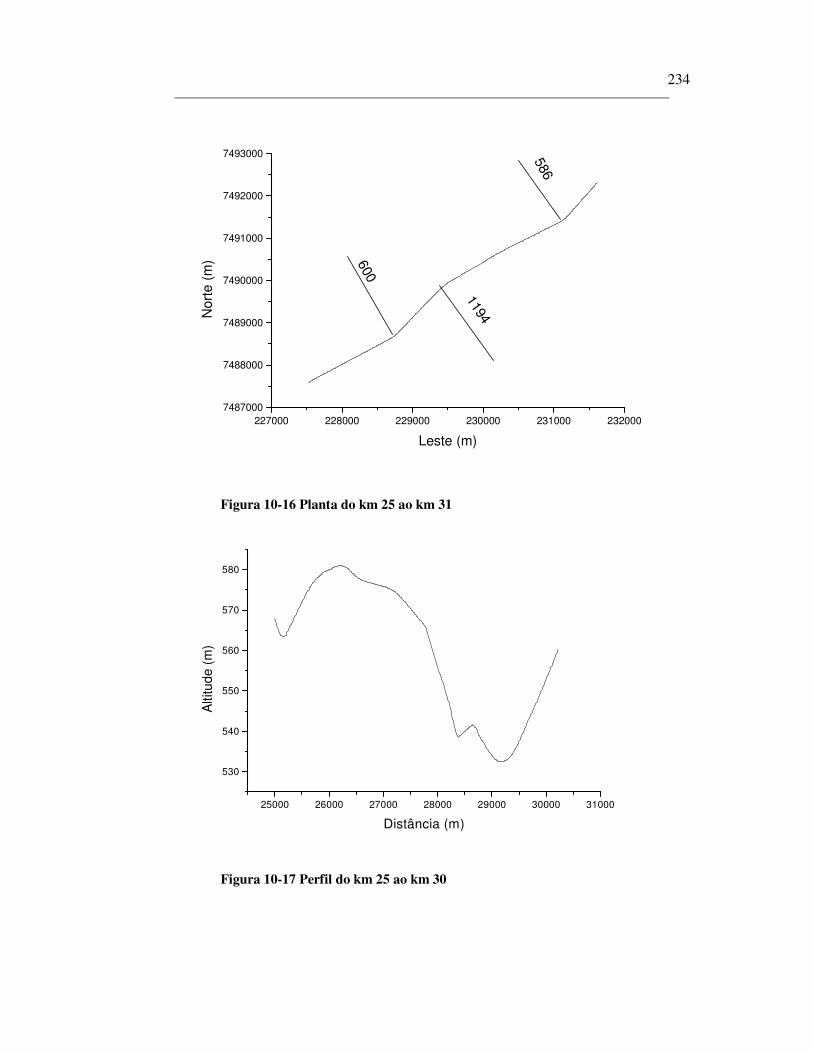
Analisando o alinhamento horizontal (ver Tabela 10-1 e Figura 10-17)
verifica-se que este provavelmente não é um fator concorrente na causa dos
acidentes, pois as curvas são suaves, o que nos remete a admitir que as rampas
podem representar uma influência significativa.
233
Tabela 10-1– Detalhes das Curvas Horizontais do km 25 ao km 30
Curva horizontal Km inicial Km final Raio [m] 1 26 262 586 2 28.3 28.6 1194 3 29.7 29.9 600
Tabela 10-2 – Detalhes das Rampas do km 25 ao km 30
Rampa Km inicial Km final % Comprimento [m] 1 25.21 25.39 2.72 0.18 2 25.68 25.70 2.06 0.02 3 25.76 25.79 1.30 0.02 4 25.97 26.02 0.46 0.06 5 26.26 26.34 -0.64 0.08 6 26.42 26.49 -1.15 0.08 7 26.61 27.01 -0.37 0.41 8 27.09 27.13 -0.52 0.04 9 27.20 27.42 -1.36 0.22
10 27.47 27.74 -1.59 0.26 11 27.78 28.18 -4.37 0.40 12 28.28 28.34 -4.90 0.06 13 28.38 28.64 1.22 0.25 14 28.75 28.93 -2.17 0.18 15 29.02 29.05 -1.48 0.03 16 29.12 29.14 -0.46 0.02 17 29.30 29.34 1.52 0.04 18 29.43 29.77 3.02 0.34 19 29.82 30.17 3.26 0.35 20 30.40 30.46 -0.49 0.06 21 30.59 30.69 -4.56 0.11 22 30.89 31.34 -4.07 0.45
234
227000 228000 229000 230000 231000 2320007487000
7488000
7489000
7490000
7491000
7492000
7493000
600
1194
586
Nor
te (
m)
Leste (m)
Figura 10-16 Planta do km 25 ao km 31
25000 26000 27000 28000 29000 30000 31000
530
540
550
560
570
580
Alti
tude
(m
)
Distância (m)
Figura 10-17 Perfil do km 25 ao km 30
235
0
1
2
3
4
5
6
7
8
25 26 27 28 29 30
km
nú
me
ro
de
ac
ide
nte
s
ABALROAMENTOLONGITUDINAL
ABALROAMENTOTRANSVERSAL
COLISÃOFRONTAL
COLISÃOTRASEIRA
Figura 10-18 – Tipo de Acidente Ocorrido entre o km 25 e o km 30
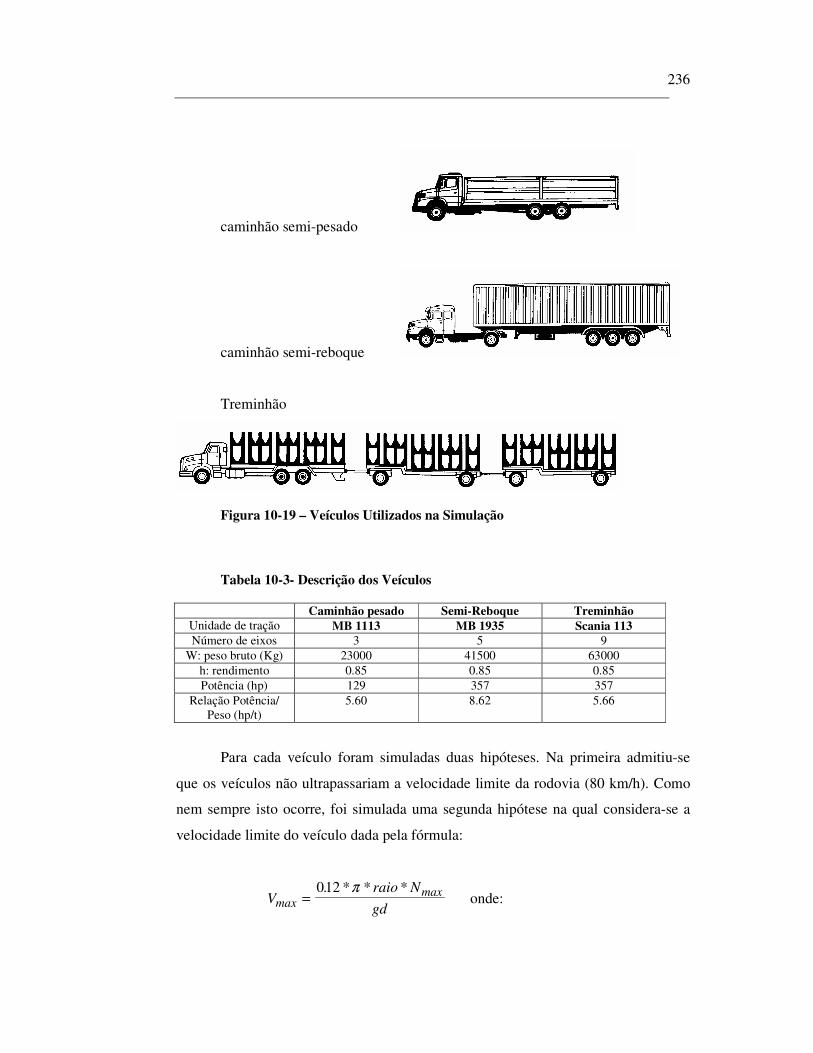
Para analisar como a geometria influencia no desempenho dos veículos,
principalmente dos veículos de carga, foram obtidas as velocidades através de um
método de simulação desenvolvido no Departamento de Transportes do EESC–USP
pelo Eng. MSc. Sérgio Demarchi.(DEMARCHI, 1998). Foram utilizados nesta
simulação: um caminhão semi-pesado (MB1114), um semi-reboque (MB1935) e um
treminhão (Scania 113). A descrição dos veículos está na Tabela 10-3.
236
caminhão semi-pesado
caminhão semi-reboque
Treminhão
Figura 10-19 – Veículos Utilizados na Simulação
Tabela 10-3- Descrição dos Veículos
Caminhão pesado Semi-Reboque Treminhão Unidade de tração MB 1113 MB 1935 Scania 113 Número de eixos 3 5 9
W: peso bruto (Kg) 23000 41500 63000 h: rendimento 0.85 0.85 0.85 Potência (hp) 129 357 357
Relação Potência/ Peso (hp/t)
5.60 8.62 5.66
Para cada veículo foram simuladas duas hipóteses. Na primeira admitiu-se
que os veículos não ultrapassariam a velocidade limite da rodovia (80 km/h). Como
nem sempre isto ocorre, foi simulada uma segunda hipótese na qual considera-se a
velocidade limite do veículo dada pela fórmula:
Vraio N
gdmaxmax=
012. * * *π onde:
237
onde:
raio: raio de rolamento do pneu
N: máxima rotação do motor
gd: redução do diferencial
O fator que levou a simular a primeira hipótese (velocidade máxima de 80
km/h) foi que limitando-se a velocidade do caminhão na descida, diminuirá a sua
velocidade de entrada na rampa ascendente e portanto a velocidade no final no trecho
será mais baixa, acarretando uma maior interferência no tráfego.
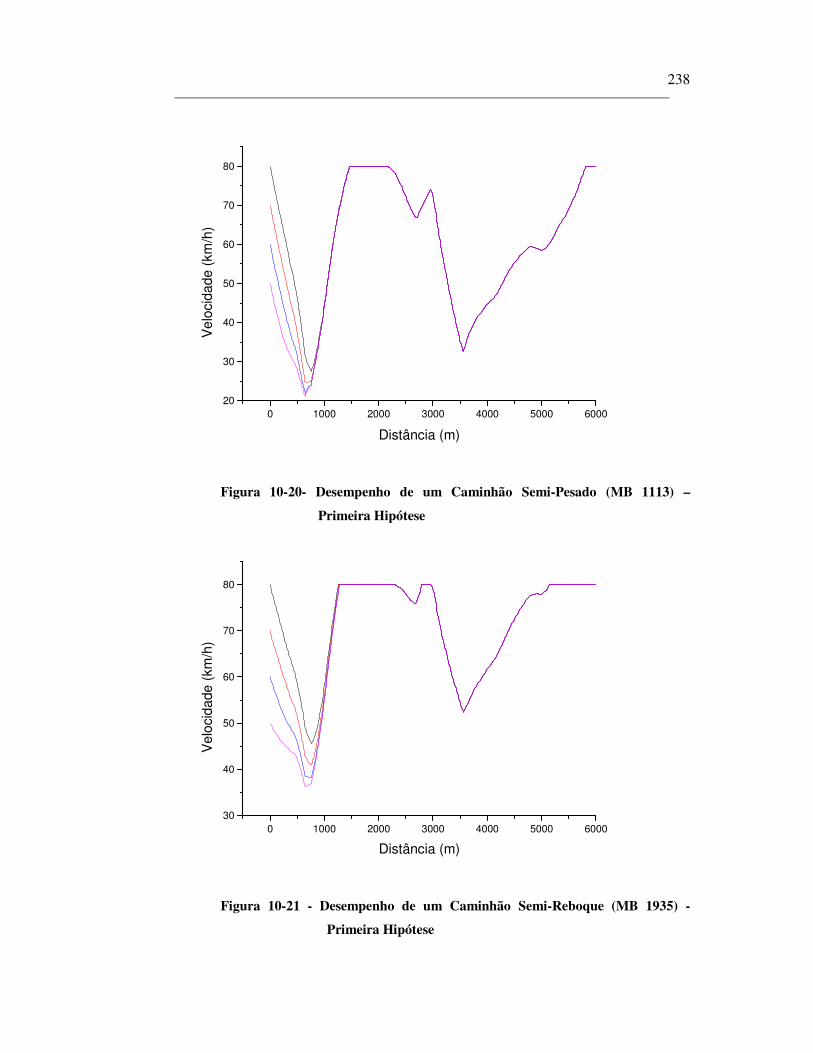
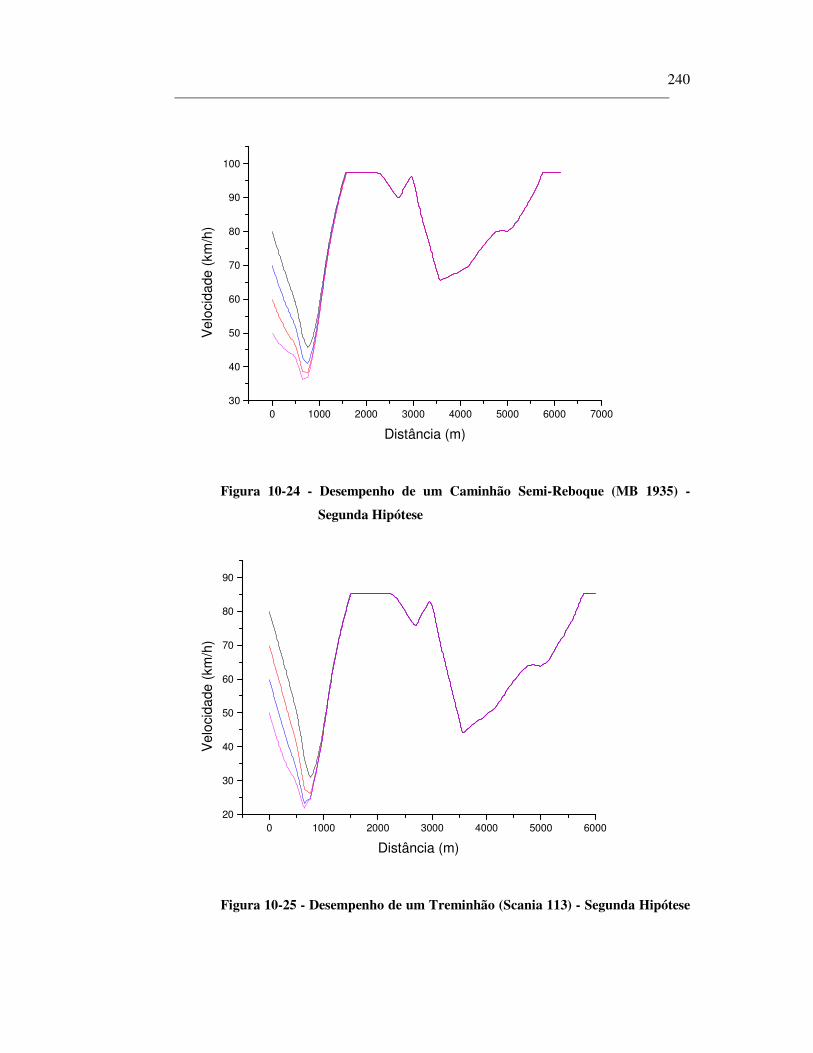
Para análise do desempenho no trecho selecionado, foram simuladas várias
velocidades de entrada (80,70,60,50 km/h). Os resultados são apresentados nas
Figura 10-19 a Figura 10-24. Analisando o comportamento dos três tipos de veículos,
verificamos que o semi-reboque tem um desempenho superior aos demais e que o
caminhão semi-pesado e o extra-pesado (treminhão) têm desempenho semelhante.
Esta diferença está relacionada com a relação potência/peso.
O que se pode notar é que todos os veículos conseguem manter a velocidade
de 80 km /h ou superior em pequenos trechos, ou seja, estes seriam os trechos onde
os veículos de carga não interferem no desempenho dos outros veículos. Nos demais
trechos a baixa velocidade dos veículos de carga pode aumentar o risco de acidentes
por induzir os veículos mais rápidos a ultrapassá-los sob condições não ideais.
Como se acredita que os acidentes do tipo colisão e abalroamento são
causados pelo elevado diferencial de velocidade nas rampas longas e/ou íngremes,
justifica-se a hipótese de que o perfil neste trecho seja um fator contribuinte para os
acidentes, pois os veículos trafegam com baixa velocidade e metade dos acidentes
ocorridos no trecho é deste tipo.
238
0 1000 2000 3000 4000 5000 600020
30
40
50
60
70
80
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-20- Desempenho de um Caminhão Semi-Pesado (MB 1113) –
Primeira Hipótese
0 1000 2000 3000 4000 5000 600030
40
50
60
70
80
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-21 - Desempenho de um Caminhão Semi-Reboque (MB 1935) -
Primeira Hipótese
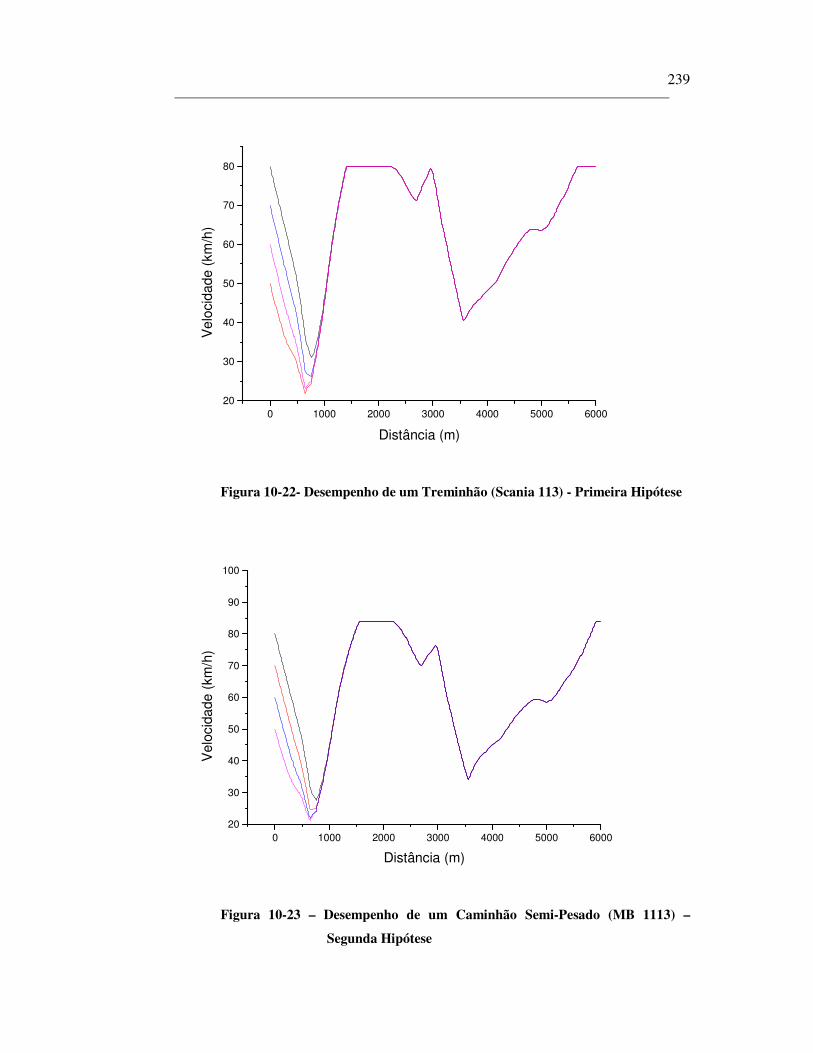
239
0 1000 2000 3000 4000 5000 600020
30
40
50
60
70
80
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-22- Desempenho de um Treminhão (Scania 113) - Primeira Hipótese
0 1000 2000 3000 4000 5000 600020
30
40
50
60
70
80
90
100
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-23 – Desempenho de um Caminhão Semi-Pesado (MB 1113) –
Segunda Hipótese
240
0 1000 2000 3000 4000 5000 6000 700030
40
50
60
70
80
90
100
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-24 - Desempenho de um Caminhão Semi-Reboque (MB 1935) -
Segunda Hipótese
0 1000 2000 3000 4000 5000 600020
30
40
50
60
70
80
90
Vel
ocid
ade
(km
/h)
Distância (m)
Figura 10-25 - Desempenho de um Treminhão (Scania 113) - Segunda Hipótese
11 CONCLUSÕES E RECOMENDAÇÕES
A principal contribuição foi o desenvolvimento de um método para separar os
elementos geométricos horizontais e verticais da rodovia, o qual foi implementado
em um programa de computador na linguagem MATLAB
O modelo matemático do método mostrou-se bastante consistente através de
validações com dados de simulações, que buscaram representar várias configurações
de curvas, tanto horizontais como verticais com os dados do projeto executivo da SP-
127 e com dados obtidos com o sistema GPS na mesma rodovia.
Nos casos teóricos simulados de perfil vertical que, tiveram comprimentos
inferiores a 3 km, a diferença entre os valores restituídos e originais do traçado foi
inferior a 0.01 m e o erro na determinação do raio de curvatura vertical foi inferior a
77 m. Nas rampas as diferenças de inclinação simuladas e restituídas foram
praticamente zero. Para a planta, o maior erro na determinação do raio foi de 72 m e
a maior diferença entre o traçado restituído e o original foi de 11 m.
Com os dados do projeto executivo da SP-127 com trechos superiores a 3 km,
constatou-se que o método também consegue obter uma boa aderência com relação
aos dados originais tanto em planta quanto perfil.
Nos 32 km de dados levantados com o sistema GPS cinemático, o maior erro
constatado no cálculo do traçado foi de 3 m no perfil e 27 m na planta, assumindo
que estes dados representam corretamente o as-built da estrada. Para verificar essa
hipótese, foi realizado um levantamento clássico do perfil com uma Estação Total em
242
um trecho de 3 km. A diferença entre os dois levantamentos apresentou uma média
de 0,35 m e um máximo inferior a 1 m.
O método matemático apresenta problemas de ajuste quando ocorre uma
sucessão de rampas com pequenas variações de inclinação.As causas destas
oscilações da inclinação podem ser as imperfeições no pavimento, pequenas erros
nos dados GPS e outras interferências. Mesmo assim, do ponto de vista da restituição
da geometria para análise da relação entre os acidentes e a geometria da rodovia,
estes desvios do método proposto são pouco importantes, pois os valores médios
obtidos para as rampas com mais de dez estacas são compatíveis com o projeto e não
afetam o desempenho dos veículos em termos de velocidade. Essa característica
permite a utilização do método de forma autônoma, dispensando-se a existência de
projeto executivo ou outras formas de levantamento de dados.
Os resultados do método em termos de aderência ao as-built do caso em
estudo permitem recomendá-lo para uso sem necessidade de verificação em relação
ao projeto executivo. Recomenda-se entretanto, que a pesquisa seja estendida para
trechos em regiões montanhosas onde existem normalmente sucessivas curvas
horizontais com raios pequenos.
Comparando o método proposto com os encontrados na literatura, pode-se
ressaltar as seguintes vantagens:
� Assume-se um intervalo de variação de delta e do número mínimo de
pontos da curva, fornecendo o melhor resultado;
� utilizam-se dois modelos matemáticos para separação dos elementos
da rodovia, incorporando-se o resultado com menor erro;
� permite a divisão dos dados, para melhorar a acurácia dos resultados;
� pode ser utilizado para determinar os elementos de planta e perfil e,
� utilizam-se as coordenadas UTM do ponto, portanto os dados de
entrada podem ser oriundos do GPS, Estação Total, integração
GPS/INS etc
243
Na integração dos dados no Transcad, verificou-se que as diversas fontes de
dados podem ser manipuladas facilmente por este software, possibilitando uma visão
mais ampla sobre os dados. Um exemplo de como podem ser utilizados os métodos e
ferramentas propostas nesta tese foi apresentado no capítulo 10. Com todas as
informações disponíveis foi possível verificar a influência da geometria nos
acidentes, mesmo sem os dados de tráfego. Nos locais onde veículos de carga
trafegam em baixa velocidade, ocorreu o maior número de acidentes no trecho
analisado do tipo colisão traseira e abalroamento lateral. Como se acredita que os
acidentes deste tipo são causados pelo elevado diferencial de velocidade nas rampas
longas e/ou íngremes, justifica-se a hipótese de que o perfil neste trecho seja um
fator contribuinte para os acidentes.
Todas as informações obtidas nesta tese contribuem para o avanço na criação
de bancos de dados para o estudo de acidentes. O fato de ser possível visualizar a
geometria, sinalização, acidentes etc, em um mesmo gráfico, facilita o trabalho do
analista de acidentes. Além disso, possibilita a escolha de trechos cujo levantamento
precisa ser mais detalhado, reduzindo tempo e custo.
Como sugestão para trabalhos futuros, recomenda-se ampliar o banco de
dados desta tese com as informações sobre tráfego, drenagem e demais dados
sugeridos no capítulo 3. Assim, será possível realizar análises mais profundas sobre
os acidentes como acontece nos EUA com a utilização do HSIS.
A investigação sobre a integração GPS e INS precisa continuar pois, as
informações sobre a atitude do veículo fornecidas pelo INS podem trabalhar em
conjunto com as coordenadas da rodovia, de forma a diminuir o erro na determinação
do final e início das curvas horizontais e verticais para que o método possa ser
utilizado em outras aplicações que necessitam de uma representação mais exata do
244
projeto que não é o caso do estudo de acidentes. Com o ângulo roll fornecido pelo
INS, será possível determinar também a superelevação da rodovia e talvez a
localização da transição, ampliando o arquivo sobre geometria a ser incorporado ao
SIG. Os dados sobre a superelevação são essenciais no estudo das causas do
tombamento e capotamento nas rodovias.
O método para separação dos elementos da geometria apresentado constitui
um significativo avanço em relação aos métodos encontrados na literatura e pode ser
aprimorado com a introdução de novos filtros e outras informações da geometria da
rodovia fornecidas pelo INS, como por exemplo, a superelevação que pode auxiliar
na determinação do início e final da transição. Além disso, precisa-se melhorar a
interface com o usuário e criar manuais de operação do software.
ANEXO A
246
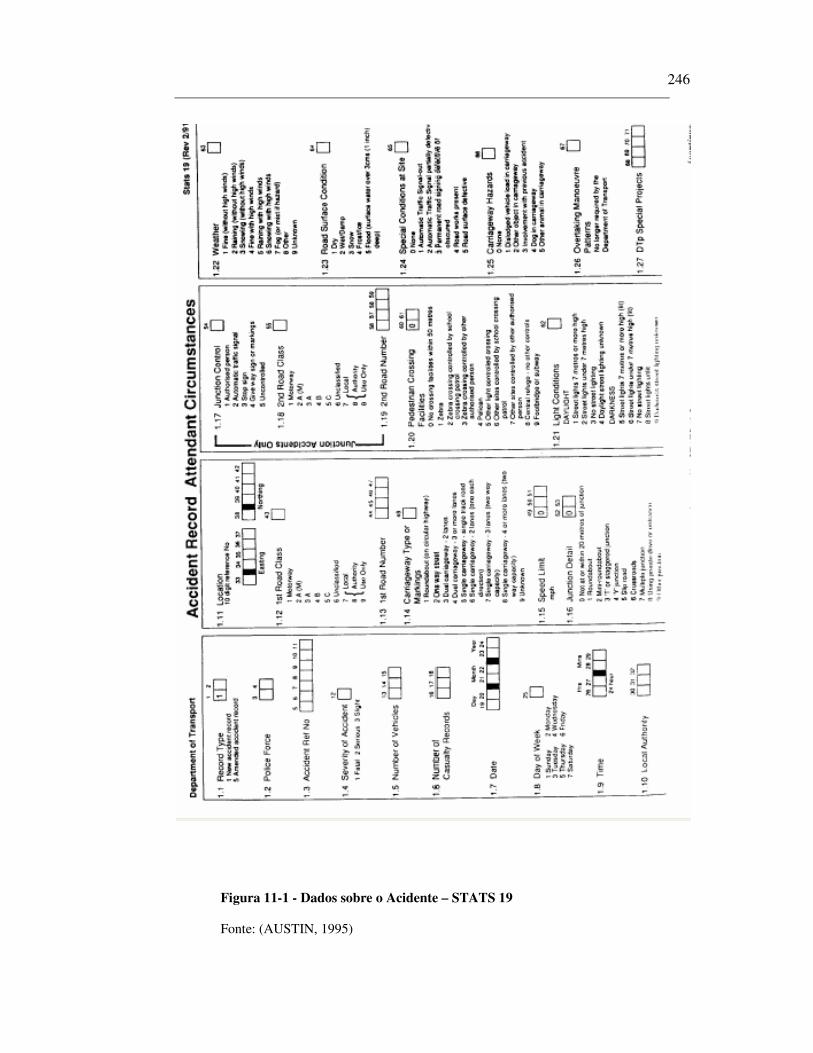
Figura 11-1 - Dados sobre o Acidente – STATS 19
Fonte: (AUSTIN, 1995)
247
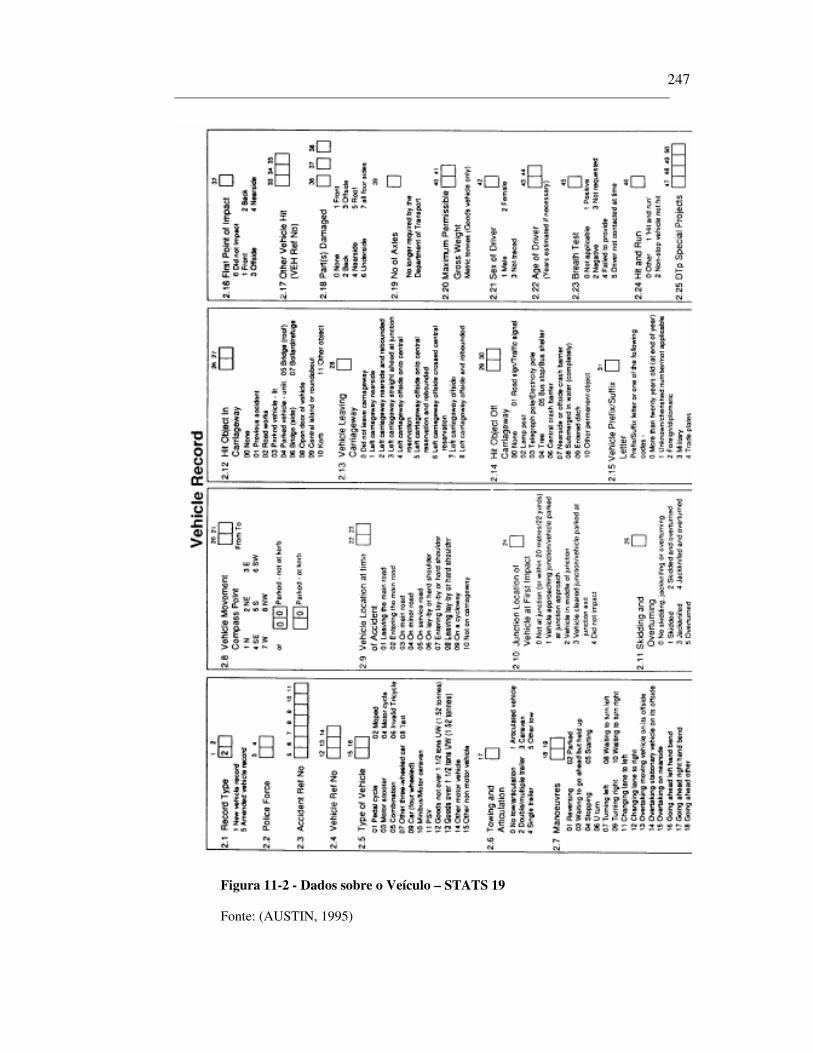
Figura 11-2 - Dados sobre o Veículo – STATS 19
Fonte: (AUSTIN, 1995)
248
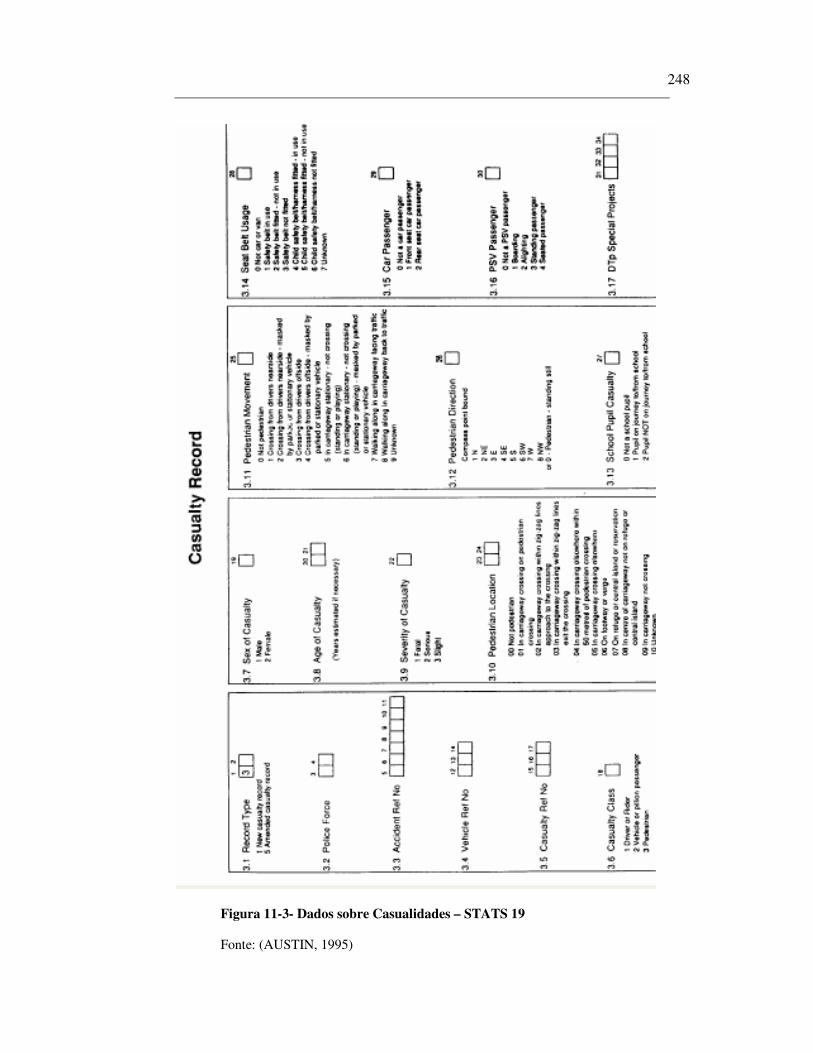
Figura 11-3- Dados sobre Casualidades – STATS 19
Fonte: (AUSTIN, 1995)
ANEXO B
250
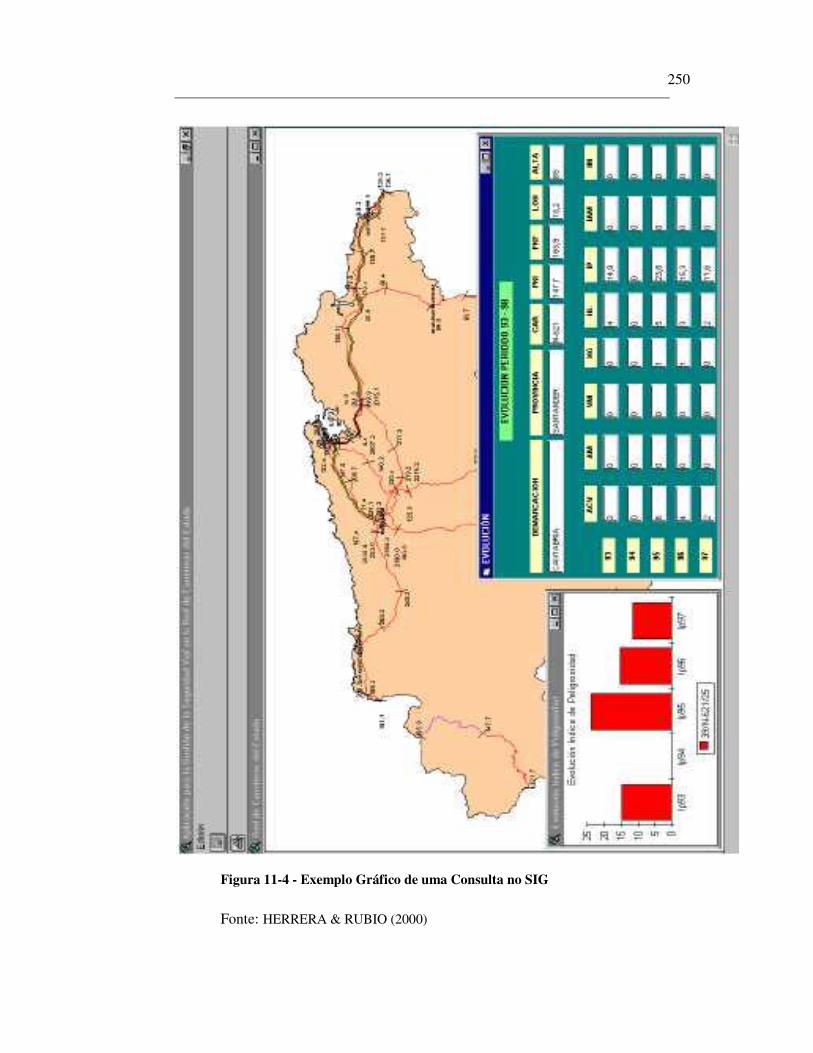
Figura 11-4 - Exemplo Gráfico de uma Consulta no SIG
Fonte: HERRERA & RUBIO (2000)
251
Figura 11-5- Exemplo Gráfico de uma Consulta no SIG
Fonte: HERRERA & RUBIO (2000)
ANEXO C
253
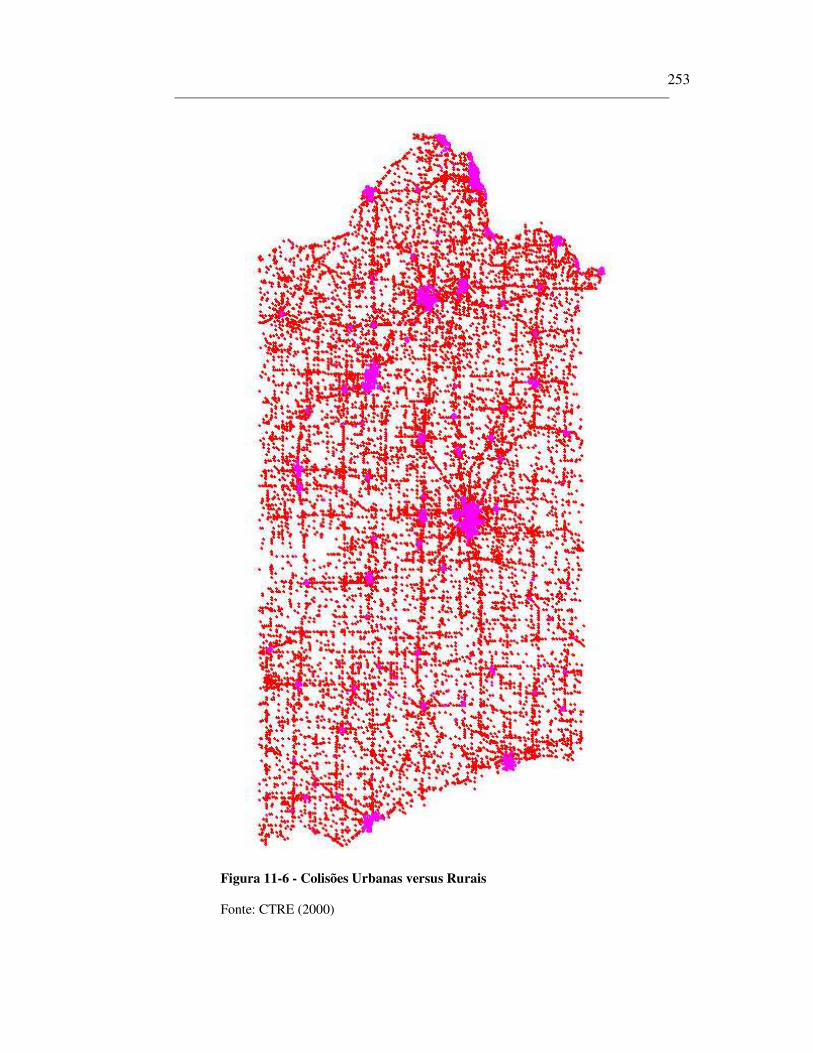
Figura 11-6 - Colisões Urbanas versus Rurais
Fonte: CTRE (2000)
254
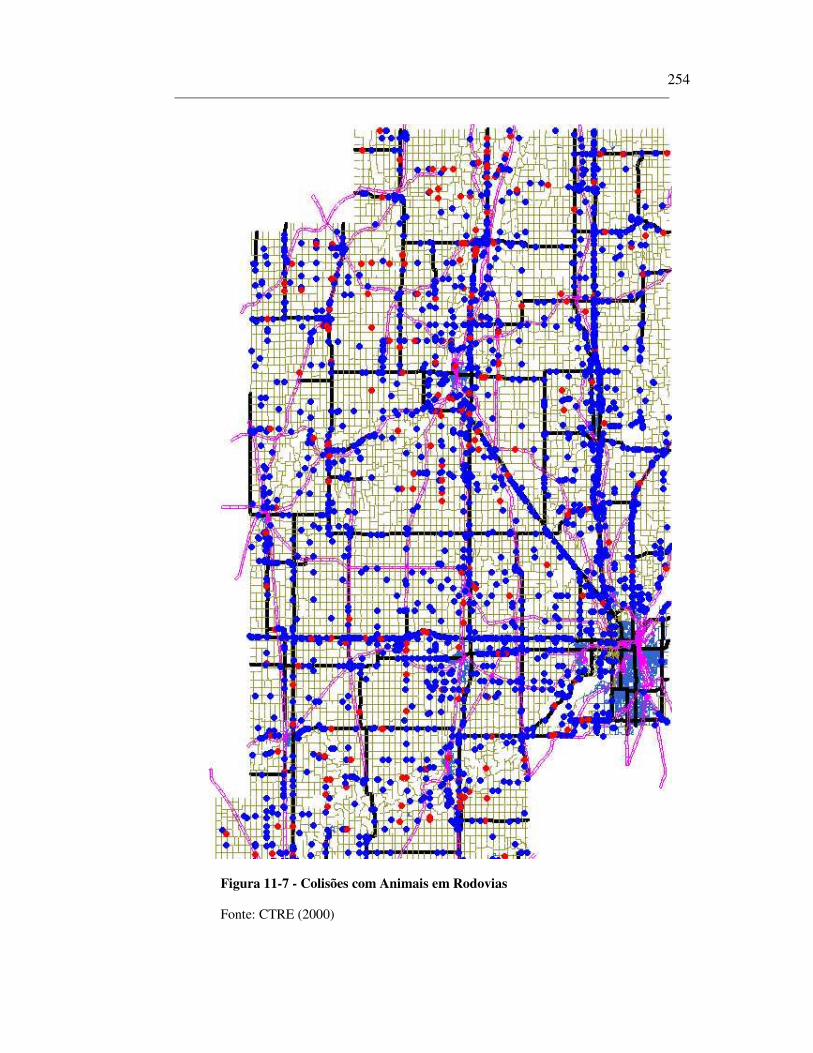
Figura 11-7 - Colisões com Animais em Rodovias
Fonte: CTRE (2000)
255
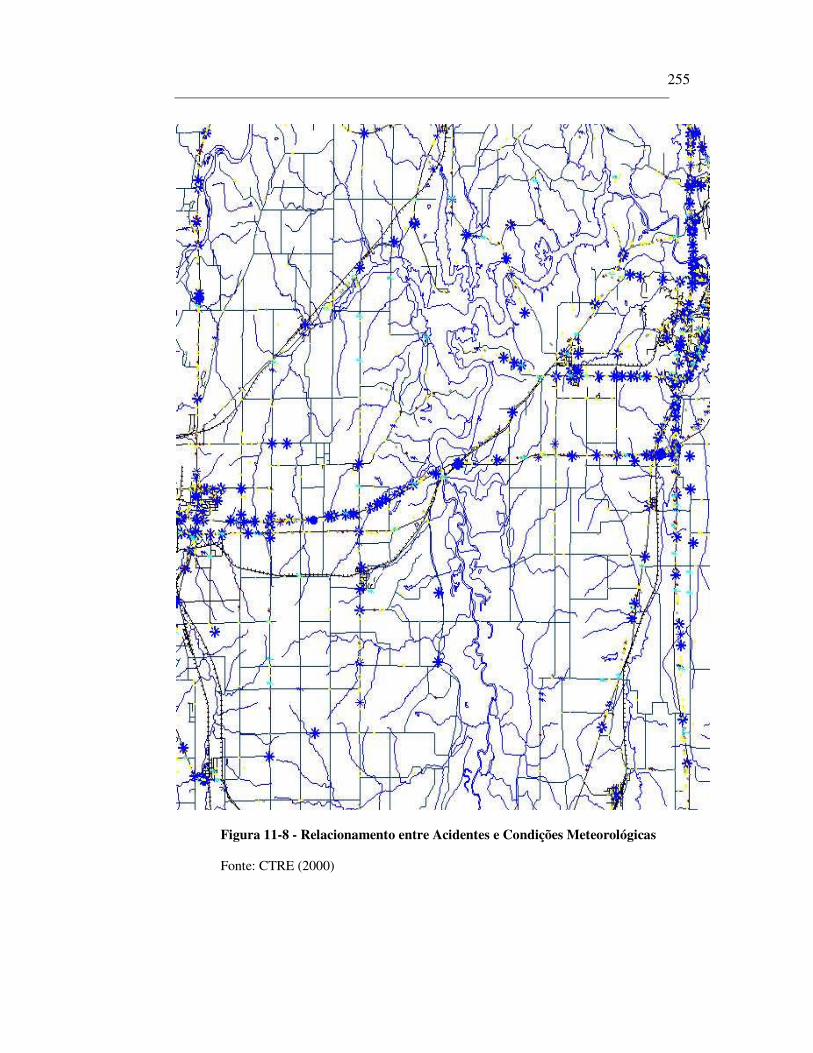
Figura 11-8 - Relacionamento entre Acidentes e Condições Meteorológicas
Fonte: CTRE (2000)
256
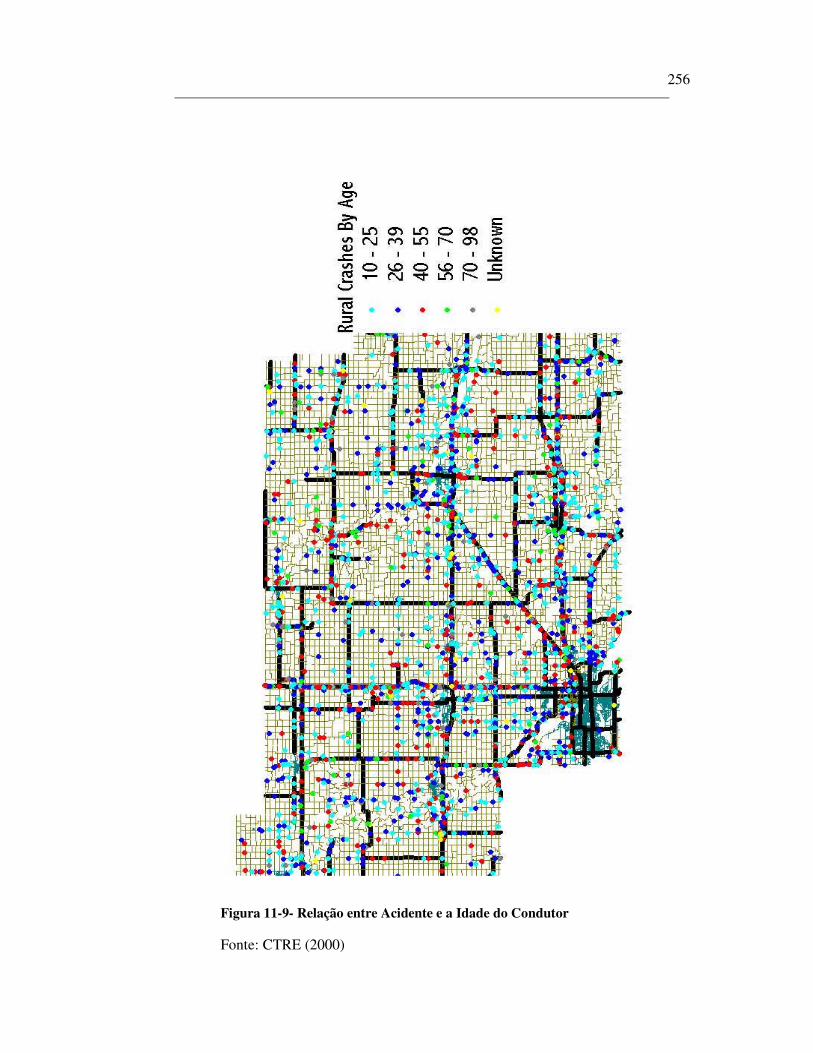
Figura 11-9- Relação entre Acidente e a Idade do Condutor
Fonte: CTRE (2000)
ANEXO D
258
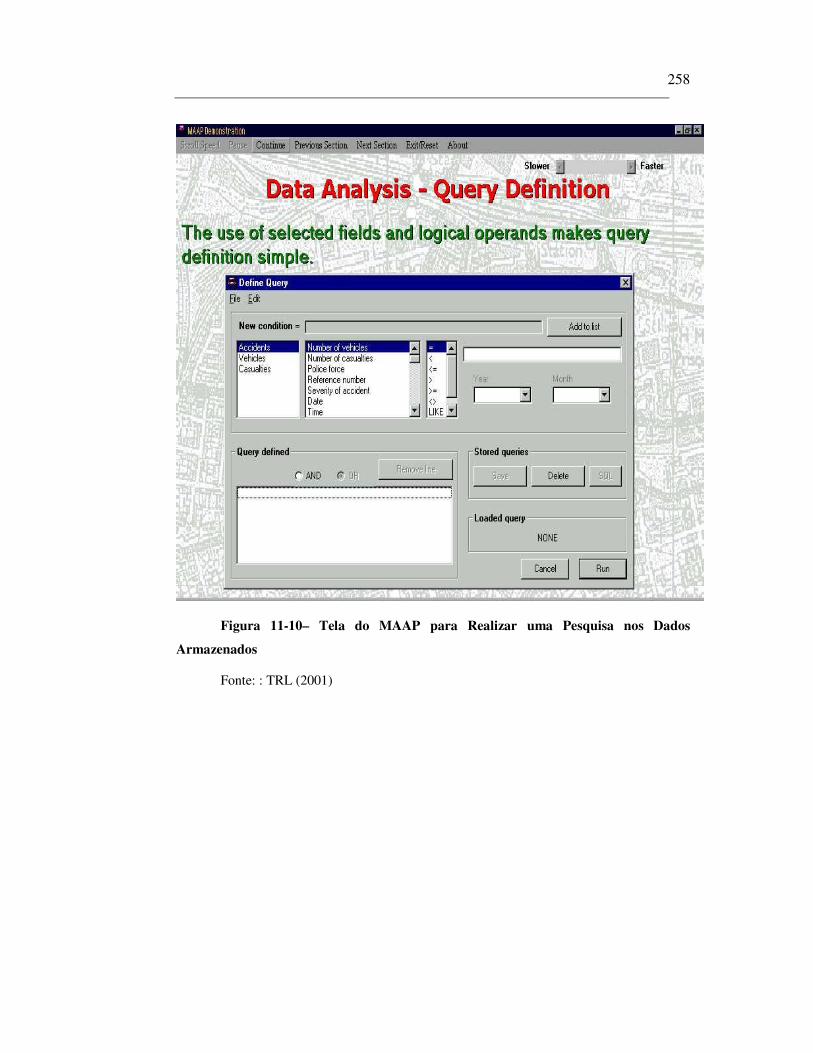
Figura 11-10– Tela do MAAP para Realizar uma Pesquisa nos Dados
Armazenados
Fonte: : TRL (2001)
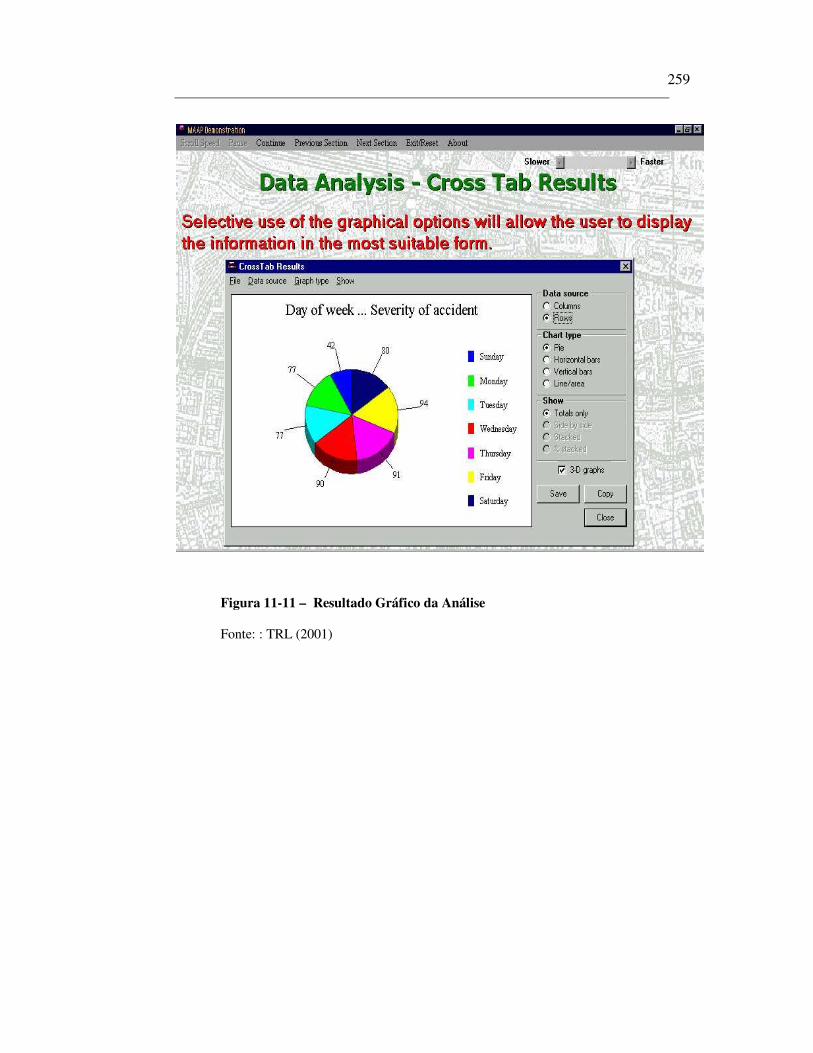
259
Figura 11-11 – Resultado Gráfico da Análise
Fonte: : TRL (2001)
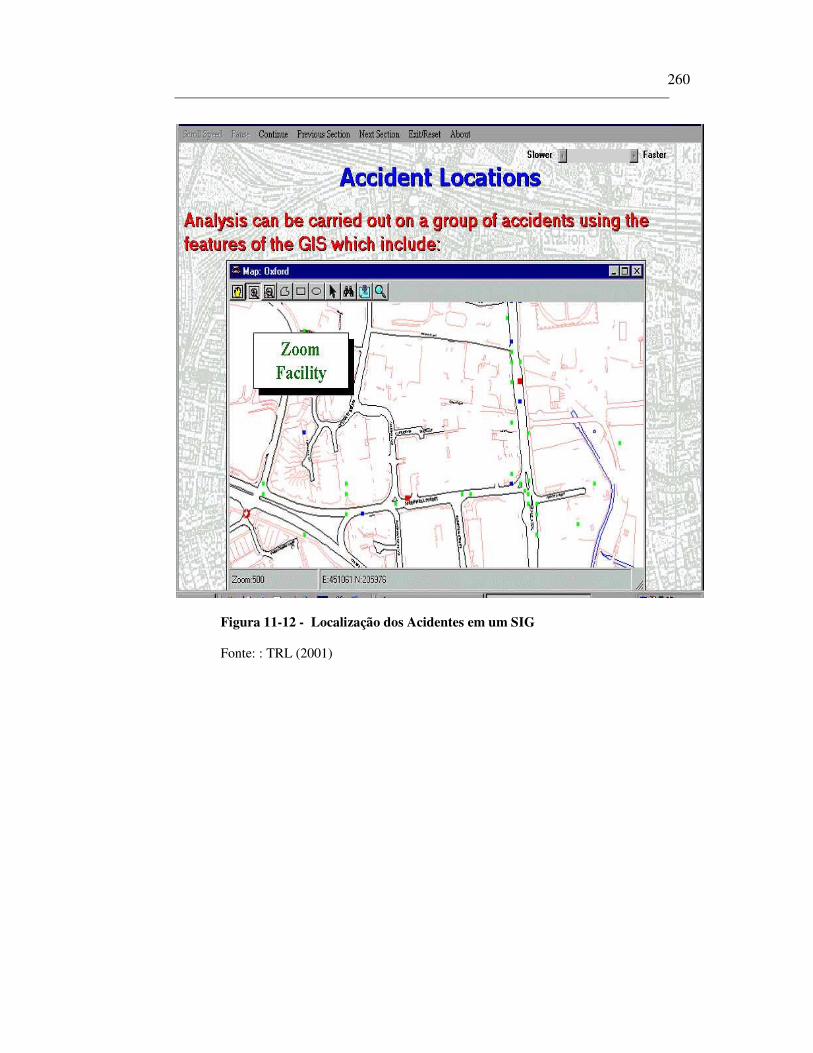
260
Figura 11-12 - Localização dos Acidentes em um SIG
Fonte: : TRL (2001)
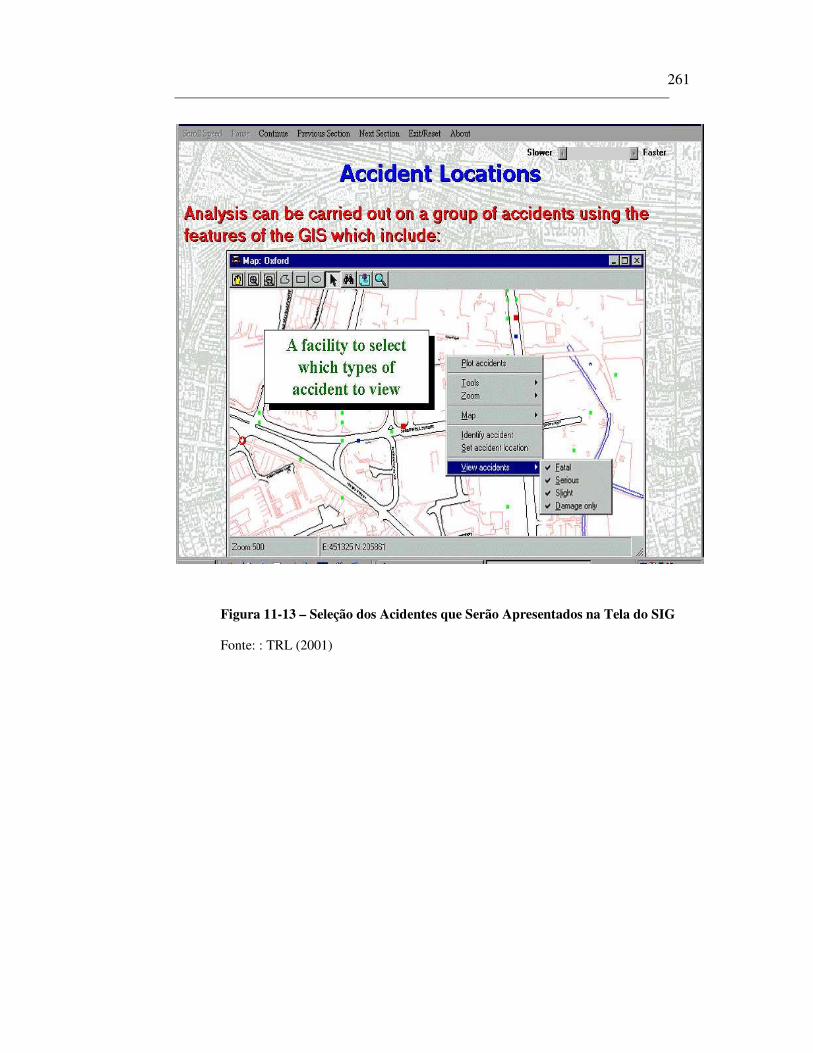
261
Figura 11-13 – Seleção dos Acidentes que Serão Apresentados na Tela do SIG
Fonte: : TRL (2001)
ANEXO E
263
264
265
266
12 BIBLIOGRAFIA REFERENCIADA
APPLANIX (1998) http:// www.applanix.com Acesso em 12/11/1998
ASSHTO (1990) A Policy on Geometric Design of Highways and Streets,
Washington, DC. USA.
ASSOCIAÇÃO BRASILEIRA DE CONCESSIONÁRIAS DE RODOVIAS –
ABCR (2000) http://www.abcr.org.br
AUSTIN, Kevin (1995) “The Identification of Mistakes in Road Accidents Records:
Part 1: Locational Variables” Accident Analysis and Prevention, vol. 25, no. 2,
pp. 261-276.
AWUAH-BAFFOUR, Robert; SARASUA, Wayne; DIXON, Karen K.;
BACHMAN, Willian; GUENSLER, Randall (1997) “Global Positioning System
with an Attitude Method for Collecting Raodway Grade and Superelevation
Data” Transportation Research Record 1592, pp.144-150, TRB.
BOCKMANN, Lars (1998) "Road Mapping by Use of GPS in Combination with
Inertial Navigation System"
http://www.navcen.uscg.mil/cgsic/meetings/summaryrpts/31stmeeting/bockmann
/bockmann.htm Acesso em: 17/11/2000
BREZINSKA, Dorota A (1996) “Dynamic Estimation of Ral and Highway Grade of
Rail and Curvature” In: Proceedings of the 1996 9th International Meeting of the
Satellite Division of the Institute of Navigation – ION GPS 96, v.2, pp. 1243-
1251.
268
BRICH, Stephen C. & FITCH, G. Michael (1997) “Opportunities for collecting
Highway inventory Data With the Global Positioning System” Transportation
Research Record 1593, pp. 64-71
BURDEN, R. L.; FAIRES, J.D.; REYNOLDS, A.C. (1981) Numerical Analysis,
2nd Edition, Editora Prindle, Weber & Shmidt, EUA
CALIPER (1995) TRANSCAD - Transportation GIS Software (User Guide)
CALIPER (1998) http.://www.caliper.com Acesso em 3/06/1998
CENTER FOR TRANSPORTATION RESEARCH AND EDUCATION - CTRE
(2000) “Gis-Based Accident Location And Analysis System (Gis-Alas) Phase 2
Proposal” http://www.ctre.iastate.edu/research/multimod/alas/prop_ph2.htm
Acesso em 16/12/2000
CHOUEIRI, Elias M.; LAMM, Ruediger; Kloeckner, Juergen H.; Mailaender,
Theodor (1994) “Safety Aspects of Individual Design Elements and Their
Interactions on Two-Lane Highways: International Perspective” Transportation
Research Record 1445, TRB, p.34-46.
DAWOUD, S.; NIXON, R.; SOLOMON, M. (1997) “Kinematic GPS/INS Road
Curvature Determination” ENGO 500 Final Report, Department of Geomatics
Engineering, University of Calgary, Calgary.
DEMARCHI, Sérgio H. (1998) Relatório Técnico Interno Departamento de
Transportes. EESC-USP. São Carlos
DENATRAN (2002) ‘Política Nacional de Trânsito – PNT – Texto básico IV’
http://www.denatran.gov.br Acesso em 21/03/2002
DOUGAN, C.; GREEN, D.; KAUFAM, W.; KENT, E.; O'KEEFE, T.; WANG, H.;
WENTWORTH, J. (1994) "Advanced Transportation Technology"
http://www.bts.gov/NTL/DOCS/advtech.html Acesso em 2/03/1998
269
DRAKOPOULOS, A. & ÖRNEK, E. (2000) “Use of Vehicle-Collected Data to
Calculate Existing Roadway Geometry” Journal of transportation Engineering,
vol, 126, no. 2, March/April, pp. 154-160.
EASA, Said ; HASSAN, Yasser: KARIM, Z. Abdul (1998) “Establishing Highway
Vertical Alignment Using Profile Field Data” ITE Journal on the Web, August,
pp.81-86.
EL-SHEIMY, Naser & SCHWARZ, K.P. (2000) "KINGPSPAD"
http:\\uti.ca\kingspad.htm Acesso em 8/03/200
ELVIK, Rune (2000) “How Much Do Road Accidents cost the National Economy?”
Accident Analysis and Prevention, no. 32, pp.849-851
ERSI EARTH RESOURCE SURVEYS (1998) http://www.ersi.bc.ca/ Acesso em
5/27/1998
FCT(2002) ‘Laboratório de Mapeamento Móvel”
http://www.prudente.unesp.br/dcartog/labs/lmm/index.htm Acesso em
20/03/2002
FHWA (2000) "Highway Safety Information System (HSIS) - Overview"
http://ntl.bts.gov/ntl/DOCS/hsis/hsisbrochure.htm Acesso em 10/03/2000
GEIPOT (1998) Anuário Estatístico dos Transportes 1997
http://www.geipot.gov.br data Acesso em 20/05/1998
GEIPOT (2000) Anuário Estatístico dos Transportes 1998
http://www.geipot.gov.br Acesso em 21/05/01
GELB, Arthur (1996) Applied Optimal Estimation , M.I.T Press, 14 th edition
GERDAN, George P. (1992) “Efficient Surveying with the Global Positioning
System” Surveying and Land Information Systems, vol. 52, no.1, pp.34-40.
270
GLENNON, John C. (1987). “Effect of Alignment on Highway Safety” State of the
Art Report 6 - Relationships between Safety and Key Highways Features, TRB,
pp. 48-63.
HALL, J. W. & TURNER, D. S. (1989) “Stopping Sight Distance: Can We See
Where We Now Stand?” Transportation Research Record, no 1208, pp 4-13,
TRB.
HAN, S. & RIZOS, C. (1999) “Road Slope Information From GPS-Derived
Trajectory Data” Journal of Transportation Engineering, vol.125, no.2, May, pp.
59-69.
HERRERA, D. Alonso Domínguez & RUBIO, D. Roberto Liamas (2000)
“Experiencia en Aplicaciones de los Sistemas de Información Geográfica a la
Seguridad vial Analisis y Demostración Practica” In: IV Congresso de
Ingeniería Del Transporte – CIT 2000. Anais (CD-ROOM). Valencia, Espanha
HUMMER, J.E.; SCHEFFLER, C.R.; KHATTAK, A.; KARIMI, H.A. (2000)
“Choosing an Inventory Data Collection System” Transportation Research
Record, no. 1690, pp.126-134.
INNES, J. (1981) "Inertial Platform Techniques for Rapid Surveys of Hilliness and
Bendiness" Sensors in Highway and Civil Engineering, pp. 143-154.
JUSTO, E. T (2001) Relatório Técnico Interno Departamento de Transportes.
EESC-USP. São Carlos
KARIMI, H.A.; HUMMER, J.E. (2000) “Collection and Presentation of Roadway
Inventory Data” National Cooperative Highway Research Program, Report 437,
75p., TRB
KAYTON, M.; FRIED, W.R. (1969) Avionic Navigation Systems editora John
Wiley & Sons.
KRAKIWSKY, Edward J. (1987) “Papers for the CISM Adjustment and Analysis
Seminars” Canadian Institute of Geomatics.
271
KRAKIWSKY, Edward J. (1998) “Technology Closeup: Navigation and Tracking
System” http://www.advanstar.com Acesso em 5/18/1998
KVH (1999) http://www.kvh.com Acesso em 10/11/1998
LAMBDATECH (1998) http:// www.lambdatech.com/ Acesso em 19/01/1998
LAPUCHA, D. (1990) “Precise GPS/INS Positioning for Highway Inventory
System” MSc Thesis, Publication #20038, Department of Geomactics
Engineering, University of Calgary, Calgary.
LI, Deren; ZHONG, Si-Dong; HE, Sai-xian; ZHENG, Han (1999) "A Mobile
Mapping System Based on GPS, GIS and Multi-sensor" Proceedings
International Workshop on Mobile Mapping Technology, pp. 1-3-1 a 1-3-5,
Bangkok.
LI, Jian; ABDELWAHAB, Walid; BROWN, Gerald (1994) “Join Effects of Access
and Geometry on Two-Lane Rural Highway Safety in British Columbia”
Canadian Journal of Civil Engineering, vol. 21, no. 6, pp.1012-1024, December.
LOGSDON, Tom (1994) Understanding the NAVSTAR GPS, GIS, and IVHS,
Segunda edição, New York-EUA, Editora Van Nostrand Reinhold.
LOTTI, C. P. & WIDMER, J.A. (1998) “Desenvolvimento de Base de Dados para o
Estudo de Acidentes Rodoviários” . In: 31a Reunião de Pavimentação da ABPV.
Anais da 31a Reunião de Pavimentação da ABPV. Associação Brasileira de
Pavimentação. São Paulo, SP.
LOTTI, Cynthia P. (1997) Um Método Expedito de Representação da Geometria de
uma Rodovia na Forma em que foi Efetivamente Construída Dissertação de
Mestrado - Escola de Engenharia de São Carlos, Universidade de São Paulo
LUPTON, K. & BOLSDON, D. (1999) “An Object-Based Approach to a Road
Network Definition for an Accident Database” Computers, Environment and
Urban Systems, vol. 23, pp.383-398.
272
MARTELL, H. E. (1990) “Application of Strapdown Inertial Systems In curvature
Detection Problems” MSc Thesis, Publication #20043, Department of
Geomatics Engineering, University of Calgary, Calgary.
McGEE, H. W.; HUGHES, W. E.; DAILY, K. (1995) “Effect of Highway Standards
on Safety” National Cooperative Highway Research Program, Report 374, 75p.,
TRB.
MINISTÉRIO DOS TRANPORTES (1999) 'Banco de Informações dos Transportes'
http://www.transportes.gov.br Acesso em 29/03/1999
MINISTÉRIO DOS TRANSPORTES (2002) ‘Estatísticas de Acidentes de Trânsito
nas Rodovias Federais 1998/2000” http://www.transportes.gov.br Acesso em
21/03/2002
MUSSONE, Lorenzo; REITANI, Giuseppe; RINELLI, Savino (1995) “Vehicular
Flow Analysis to Estimate Accident Probability by Artificial Neural Networks”
Proceedings of 4th International Conference on Computers in Urban Planning
and Urban Management, Melbourne, Australia, July, vol. 1, pp. 361-368.
NOGUEIRA, A. A. R. (1994) Análise da Relação Geometria de Rodovias e
Acidentes Envolvendo Veículos de Carga, São Carlos. Dissertação de Mestrado -
Escola de Engenharia de São Carlos, Universidade de São Paulo
PELED, A.; HAJ-YEHIA, B.; HAKKERT, A.S. (1996) “ArcInfo – based
Geographical Information System for Road Safety Analyses & Improvement”
http://www.esri.com/library/userconf/proc96/TO50/PAP005/P5.HTM Acesso
em 16/10/2000
PIMENTA, Carlos R. T & OLIVEIRA, M. (1997) Projeto de Estradas, São Carlos,
publicação da Escola de Engenharia de São Carlos.
RABBANI, Simin Jalail Rahnemay; RABBANI, Soheil Rahnemay; MEDEIROS,
Rosinaldo do Rio (1994) “Acidentes de Tráfego e Características Geométricas
das Vias” VII Congresso de Pesquisa e Ensino em Transportes, vol. I, pp. 405-
414, Recife
273
ROADWARE (2000) http:\\www.roadware.com Acesso em 24/01/00
SACCOMMANNO, F. F.; CHONG, K. C. ; NASSAR, S. A. (1997) “Geographic
Information System Platform for Road Accident Risk Modeling” Transportation
Research Record 1581, pp.18-26. TRB.
SCHOFIELD, W. (1993) Engineering Surveying, quarta edição, Inglaterra, editora
Butterworth-Heinemann Ltd .
SEGANTINE, Paulo C. L. (1998) GPS- Sistema de Posicionamento Global EESC-
USP
SIMKOWITZ, Howard J. (1989) “Geographic Information Systems: An Important
Technology of Transportation Planning and Operations” Transportation
Research Record 1236, pp. 14-22
SINAY, Maria Cristina Fogliatti de & OLIVEIRA, Márcio Jabour de (2000)
“Evaluación de la Práctica de Colecta de Datos de Accidentes de Tránsito” In:
IV Congresso de Ingeniería Del Transporte – CIT 2000. Anais (CD-ROOM).
Valencia, Espanha
SKALOUD, JAN (1999) Optmizing Georeferencing of Airbone Survey Systems ,
Phd Thesis, Publication #20126, Department of Geomatics Engineering,
University of Calgary, Calgary.
STOKES, Robert W. & MARUCCI, Giancarlo (1995) “GIS for Transportation:
Current Practices, Problems and Prospects” ITE Journal, pp.28-32, March.
SUN, J. (1998) “Development and Testing of a Real-time DGPS/INS Integrated
System” MSc Thesis, Publication #200118, Department of Geomactics
Engineering, University of Calgary, Calgary.
TERRATECH MAPPING SERVICES INC (1998) http://www.tms.bc.ca Acesso
em 27/05/1998
TRANSMAP (1998) http://www.transmap.com Acesso em 26/06/1998
274
TRANSPORTATION RESEARCH LABORATORY (2001) “Accident Research
and Analysis” http://www.trl.co.uk/ai.htm Acesso em 9/03/201
VERPLAETSE, C (1995) “Can A Pen Remember What It Has Written Using
Inertial Navigation?: An Evaluation Of Current Accelerometer Technology”
http://xenia.media.mit.edu/~verp/projects/smartpen Acesso em 5/18/1998
VISAT (1998) http:// www.visat.com Acesso em 24/04/1998
VOGT, Andrew & BARED, Joe G. (1998) “Accident Models for Two-Lane Rural
Roads: Segments and Intersections” Publication no. FHWA_RD-98-133,
October,1998, http://www.bts.gov/ntl/docs/98133/foreword/foreword.html
Acesso em 26/12/2201
WONG, Richard V. C. (1988) Development of a RLG Inertial Survey System, Phd
Thesis, Department of Geomatics Engineering, University of Calgary, Calgary.
WORLD BANG GROUP (2000) Road Safety http:// www.worldbank.org Acesso
em 9/03/2000
ZEGEER, Charles V.; REINFURT, Donald W.; HUMMER, Joseph; Lynne, Herf;
HUNTER, William (1988) “Safety Effects of Cross-Section Design for Two-
Lane Roads” Transportation Research Record 1195, TRB, pp.20-32.
ZEGEER, Charles V.; STEWART, J. Richard; COUNCIL, Forrest M.; REINFURT,
Donald W.; HAMILTON, Elizabeth (1992) “Safety Effects of Geometric
Improvements on Horizontal Curves” Transportation Research Record 1356,
TRB, pp. 11-19.
13 BIBLIOGRAFIA CONSULTADA
ABWOITZ, Mark; WALSH, Stephen; HAUSER, Edwin; MINOR, Larry (1990)
“Adaptation of Geographic Information Systems to Highway Management”
Journal of Transportation Engineering, vol.116, no3,pp. 310-327, May/June.
AKINYEDE, Joseph O; TURNER, Keith; RENGERS, Niek (1990) “Predictive
Modeling of Roadway Costs in Nigeria” Transportation Research Record , no
1288, pp. 175-182, TRB
ALBRIGHT, David (1987) “A Quick Cluster Control Method: Permanent Control
Station Cluster Analysis in Average Daily Traffic Calculations” Transportation
Research Record, no 1134, pp.57-64, TRB
AL-TURK, E. & UDDIN, W. (1999) “Infrastructure Inventory and Condition
Assessment Using Airborne Laser terrain Mapping and Digital Photography”
Transportation Research Record 1690, pp.121-125, TRB.
AUSTIN, Kevin; TIGHT, Miles; KIRBY, Howard (1996) “The use of Geographical
Information Systems to Enhance Road Safety Analysis” Transportation
Planning and Technology, vol. 20, pp.249-266.
BIEZAD, Daniel J. (1988) “Synthesis and Test Issues for Future Aircraft Inertial
Systems Integration” IEEE AES Magazine, vol. 3, no. 9, pp. 19-23, September.
BLACK, Willian R. (1991) “Highway Accidents: A Spatial and Temporal Analysis”
Transportation Research Record 1318, pp.75-82, TRB.
BONNESSON, James A. & FITTS, Joel W. (1995) “Traffic Data collection Using
Video-Based Systems” Transportation Research Record 1477, pp.31-40, TRB.
276
BRAVER, Elisa R.; CAMMISA, Michael X.; LUND, Adrian K.; EARLY, Nancy;
MITTER, Eric L.; POWELL, Michael R. (1997) “Incidence of large Truck-
Passenger Vehicle Underride Crashes in Fatal Accident Reporting System and
National Accident Sampling System” ” Transportation Research Record 1595,
pp.27-33, TRB.
BRENAC, Thierry (1996) “ Safety at curves and Road Geometry Standards in Some
European Countries” Transportation Research Record 1523, pp.99-106, TRB.
BROWN, Bruce & BAASS, Karsten (1997) “Seasonal Variation in Frequencies and
Rates of Highway Accidents as Function of Severity” Transportation Research
Record, no 1581, pp.59-65, TRB
CANNON, M. E. (1992) “Integrated GPS-INS for High-Accuracy Road
Positioning” Journal of Surveying Engineering, vol. 118, no. 4, pp. 103-117,
November.
CANNON, M. E.; Lachapelle, G. (1993).“Kinematic Ambiguity Resolution with
High-Precision C/A Code Receiver” Journal of Surveying Engineering, vol. 119,
no. 4, p.147-155, November.
CHOU, Chia-Pei J. & CHING, Chung-Piau (1995) “Truck Load Distribution and
Its Impact on Vehicle Weight Regulations in Taiwan” Transportation Research
Record , no 1501, pp. 87-94, TRB
CHU, You-Lian; ZAER, Michael; CATALANOTO, Frank; UNGAR, Howard;
GOODMAN, Leon (1999) “Safety/GIS Models Reviewed and Related to Long
Island Arterial Needs Study” In: Proceedings of Enhancing Transportation
Safety in the 21st Century: New Tools for Transportation Professionals- Ite
International Conference (CD-ROOM) , March 28-31, Kissimmee, Flórida, USA.
CHUNG, Dohyoung; LEE, Jang Gyu; PARK, Chan Gook; PARK, Heugh Won
(1996) “Strapdown INS Error Model for Multiposition Alignment” IEEE
Transactions on Aerospace and Electronic Systems, vol. 32, no. 4, pp.1362-1366,
September.
277
CLEVELAND, Donald E.; KOSTYNIUK, Lidia P.; TING, Kuo-Liang (1984)
“Geometric Design Elements Groups and High Volume Two-Lane Rural
Highway Safety” Transportation Research Record 960, pp. 1-13, TRB.
COUNCIL, Forrest M. (1998) “Safety Benefits of Spiral Transitions on Horizontal
curves on Two-Lane Rural Roads” Transportation Research Record 1635, pp.
10-17, TRB.
CRAWFORD, William L. & CHAVEZ, Agustin (1990) “Igrds - Computer-Aided
Roadway Design and Drafting System” Journal of Transportation Engineering,
vol.116, no6, pp. 795-799, November/December
CROMER, Don (1990) “Highway Maintenance Goes High-tech: The GIS/GPS
Link” GPS World, pp.42-44, September/October
CZERNIAK, Robert J. & REILLY, James P. (1998) “Applications of GPS for
Surveying and Other Positioning Needs in Departments of Transportation”
Synthesis of Highway Practice 258, NCHRP, TRB, 43 p.
DA, Ren; LIN, Ching-Fang (1995) “Failure detection and Isolation Structure for
Global Positiong system Autonomus Integrity Monitoring” Journal of Guidance
control and Dynamics, vol. 18, no. 2, pp.291-297, March.
DANGERMOND, Jack (1992) “What is a Geographic Information System (GIS)?”
Geographic Information systems (GIS) and Mapping - Practices and Standards”
ASTM STP 1126, p. 11-17
DAVIS, Gary A (1997) “Accuracy of Estimates of Mean Daily Traffic - A Review”
Transportation Research Record, no 1593, pp.12-16, TRB
DAVIS, Gary A & GUAN Yuzhe (1996) “Bayesian Assignment of Coverage Count
Locations to Factor Groups and Estimation of Mean Daily Traffic”
Transportation Research Record , no 1542, pp. 30-37, TRB
DYNATEST (2000) “Road Surface Profiler – 5051 Mark II”
http://www.dynatest.com Acesso em 12/11/2000
278
EL-SHEIMY, Naser (1996) “ A Mobile Multi-Sensor System for GIS Applications
in urban Centers” Proceedings of International Archives of Photogrammetry and
Remote Sensing, vol. XXXI, Part B2, Vienna, pp.95-100
EL-SHEIMY, Naser (1996) “The Development od VISAT- A Mobile Survey system
for GIS Applications” ” Phd Thesis, Publication #20101, Department of
Geomactics Engineering, University of Calgary, Calgary.
FHWA (1996) “Federal Lands Highway Project Development and Design Manual”
Report FHWA-DF-88-003, 718pp. http://www.bts.gov.gov/NTL/data/pddm-
m/pdf Acesso em 1/03/2000
FHWA (2000a) “Investigation of National Highway System Roadways in the HSIS
States” FHWA_RD_98-080, April, 1998, http://www.tfhrc.gov/ Acesso em
12/11/200
FHWA (2000b) “Safety Effects of the Conversion of Rural Two-Lane Roadways to
Four-Lane Roadways” FHWA_RD_99-206, november, 1999,
http://www.tfhrc.gov/ Acesso em 12/11/200
FHWA (2000c) “The Evaluation of Emerging Technologies ofr Traffic Crash
Reporting” FHWA-RD-97-023, September 1997, http://www.fhwa.dot.gov
Acesso em 12/11/200
FHWA (2000d) “Using GIS in the Analysis of Truck Crashes” FHWA-RD-99-119,
June, 1999, http://www.tfhrc.gov/. Acesso em 12/11/200
FITZPATRICK, Kay; ANDERSON, Ingrid; COLLINS, Jon M.; HARWOOD,
Douglas M (1999) “Examples of Safety Improvements (Other than Widening to
Four Lanes) for Two-Lane Rural Roads” In: Proceedings of Enhancing
Transportation Safety in the 21st Century: New Tools for Transportation
Professionals- ITE International Conference (CD-ROOM) , March 28-31,
Kissimmee, Flórida, USA.
279
FONTÁN, Santiago & PÉREZ, Ignácio P. (2000) “Caracterización de los Factores
que Intervienen em la Accidentalidad em las Carreteras de la Red Primaria” In:
IV Congresso de Ingeniería Del Transporte – CIT 2000. Anais (CD-ROOM).
Valencia, Espanha
FORSBERG, R. ; VASSILIOU, A.A.; SCHAWARZ, K.P.; WONG, R.V.C. (1986)
“ Inertial Gravimetry – A Comparison of Kalman Filtering- Smoothing and Post-
Mission Adjustment Techniques” Bulletin Geodesique, vol. 60, pp. 129-142.
FRENCH, Alexander & SOLOMON, David (1986) "Traffic Data Collection and
Analysis: Methods and Procedures" National Cooperative Highway Research
Program- Synthesis of Highway Practice, no. 130, TRB.
GARNER, Joseph E. & LEE, Clyde, E. (1995) “Augmented Weigh-in-Motion
system for traffic Data Collection and Analysis” Transportation Research Record
, no 1501, pp. 81-86, TRB
GIPPS, Peter & GU, Kevin Q. (1999) “Some Experience with Geospatial Imagery
and Route Optimization” Transportation Research Record 1690, pp.143-152,
TRB.
HAKKERT, Alfred S.; HOCHERMAN, Irit; MENSAH, Abraham (1996) “Levels of
Safety on Interurban Roads” Transportation Research Record 1553, pp. 95-102,
TRB.
HALL, J. W. (1984) “Deficiencies in Accident Records Systems” Transportation
Planning and Technology, vol. 9, pp. 199-208.
HARKEY, David (1999) “Development of a GIS-Based Crash Referencing and
Analysis System ” In: Proceedings of Enhancing Transportation Safety in the
21st Century: New Tools for Transportation Professionals- ITE International
Conference (CD-ROOM) , March 28-31, Kissimmee, Flórida, USA
HAUER , Ezra (1996) “Statistical Test of Difference Between Expect Accident
Frequencies” Transportation Research Record , no 1542, pp. 24-29, TRB.
280
HAVINOVISKI, Gleen N.; LEONARD, Barbara; DELGADO, Dean (1994)
“Regional Approach to Strategic Intelligent Vehicle Highway System Planning in
Orange County” Transportation Research Record , no 1453, pp. 23-35, TRB
HE, Guangping (1996) “Design of a Mobile Mapping System for GIS Data
Collection” Proceedings of International Archives of Photogrammetry and
Remote Sensing, vol. XXXI, Part B2, Vienna, pp. 154-159
HEYDECKER, B.G.; SMALL,C.; POULOVASSILIS, A. (1995) “Deductive
Databases for Transport Engineering” Transportation Research – Part C, vol. 3,
no.5 pp.277-292.
HOFFMANN-WELLENHOF, B.; LICHTENEGGER, H.; Collins, J. (1994). GPS -
Theory and Practice, terceira edição, Austria, editora Springer -Verlag Wien.
INPE (1998) http://www.inpe.com.br Acesso em 4/05/1998
JANSON, Bruce (1988) “Method of Programming Regional Highway Projects”
Journal of Transportation Engineering, vol.114, no5, pp. 584-606, September.
JANSON, Bruce N. (1990) “Network Design Programming of U.S. Highway
Improvements” Journal of Transportation Engineering, vol.117, no4, pp. 457-
478, July/August.
JEKELI, Christopher (1992) “Ballon Gravimetry Using GPS and INS” IEEE AES
Magazine, vol. 7, no. 6, pp. 9-15, June.
KAHMEN, Heribert & FAIG, Wolfgang (1988) Surveying, New York, editora
Walter de Gruyter.
KHAN, Sarosh & RITCHIE, Stephen G. (1994) “Integrated System to Develop
Highway Rehabilitation Projects” Journal of Transportation Engineering,
vol.120, no1, pp. 1-20, January/February
281
KIM, Kari; LEVINE, Ned; NITZ, Lawrence (1995) “Development of a Prototype
Traffic Safety Geographic Information System” Transportation Research
Record, no 1477, pp.41-47, TRB.
KIM, Karl & LEVINE, Ned (1995) “Development of a Traffic Safety GIS in
Honolulu, Hawaii” Proceedings of 4th International conference on Computers in
Urban Planning and Urban Management, Melbourne, Australia, july, vol. 1, pp.
461-476.
KNIGHT, Donald T. (1997) “Rapid Development of Tightly-coupled GPS/INS
Systems” IEEE AES Systems Magazine, February, vol.12, no. 2, pp 14-18.
KRAMMES, Raymond (1999) “Interactive Highway Safety Design Model: A Brief
Overview” In: Proceedings of Enhancing Transportation Safety in the 21st
Century: New Tools for Transportation Professionals- ITE International
Conference (CD-ROOM) , March 28-31, Kissimmee, Flórida, USA
KRAMMES, Raymond A.; GLASCOCK, Stephen W. (1992) “Geometric
Inconsistencies and Accident Experience on Two-Lane Rural Highways”
Transportation Research Record 1356, TRB, pp. 1-10.
LAMM, Ruediger; GUENTHER, Arthur K.; CHOUEIRI, Elias M. (1995) “Safety
Module for Highway Geometric Design” Transportation Research Record 1512,
TRB, pp.7-15.
LAUNEN, Kari J. (1993) .“GPS-Rapid Solutions for Transportation Management”
Journal of Surveying Engennering, vol.119, no.1, p. 40-49, February.
LAWRENCE, Anthony (1998) Modern Inertial Technology – Navigation,
Guidance, and control, 2nd edition, ed. Springer.
LEICA (1996) GPS - System 300 - Guidelines to Stop and Go and Kinematic GPS
Surveying
282
LEWANTOWICZ, Zdzislaw H. Stan (1992) “Architectures and GPS/INS
Integration Impact on Mission Accomplishment” IEEE AES Magazine, vol. 7,
no. 6, pp. 16-20, February.
LI, R.; CHAPMAN, M. A.; QUAN, L. XIN, Y. TAO, C. (1996) “Mobile mapping
for 3D GIS Data Acquisition” Proceedings of International Archives of
Photogrammetry and Remote Sensing, vol. XXXI, Part B2, Vienna, pp.232-237.
LITTON (2000) http:\\www.litongcs.com Acesso em 14/10/1997
LOGAN, Kevin P. (1988) “A Comparison: Static and Future Kinematic GPS
Surveys” Journal of Surveying Engennering, vol.114, no.4, p.195-201,
November.
LÓPEZ, Vicente Ramón Tomás; PLUMÉ, Javier Martinez; ZAPATER, José Javier
Samper; REIG, Ignacio Sánchez (2000) “Métodos de Detección de Tramos de
Concentración de Accidentes” In: IV Congresso de Ingeniería Del Transporte –
CIT 2000. Anais (CD-ROOM). Valencia, Espanha
LOUCKES, David K.; McLAUGHLIN, John (1991) “GIS and
Tranportation:Canadian Perspective” Journal of Surveying Engennering, vol.
117, n° 3, August, p. 123-133.
LOVREN, N.; PIEPER, J. K. (1997) “A Strapdown Inertial Navigation System for
the Flat-Earth Model” IEEE Transactions on Aerospace and Electronic Systems,
vol.33, no.1, pp. 214-224 , january
MAERZ, Norbert H. & McKENNA, Steve (1999) “Surveyor – Mobile Highway
Inventory and Measurement System” Transportation Research Record 1690, pp.
135-142, TRB.
MARING, Gary (1990) “Recommendations for National Data” Transportation
Research Record , no 1271, pp. 35-36, TRB
283
MARTELL, H.; SCHWARZ, K. P.; COSANDIER, D.; WEI, M. (1993) “Boundary
Surveys by Helicopter Using GPS/INS” Surveying and land Information Systems,
vol. 53, no. 2, pp. 145-150.
MAYORA, José M. Pardilho & RUBIO, Roberto Llamas (2000) “Applicación de
Modelos de Regressión Mutivariante al Análisis de la Información de Seguridad
Vial” In: IV Congresso de Ingeniería Del Transporte – CIT 2000. Anais (CD-
ROOM). Valencia, Espanha
McELHANEY, David R. (1990) “Current National Highway Data Requirements”
Transportation Research Record , no 1271, pp. 16-19, TRB
McLELLAN, James F. (1992) “ Design and Analysis of a Low Cost GPS Aided
Navigation System” MSc Thesis, Publication #20097, Department of Geomactics
Engineering, University of Calgary, Calgary.
MEKKY, Ali (1996) “Forecasting Balanced highway Volumes Using Modeling
Packages and Spreadsheets” Transportation Research Record, no 1556, pp.46-
57, TRB.
MEYER, Michael D. (1990) “Statewide Workshop Report” Transportation
Research Record , no 1271, pp. 34, TRB
MIAOU, Shaw-Pin; LUM, Harry (1993) “Statistical Evaluation of the Effects of
Highways Geometric Design on Truck Accident Involvements” Transportation
Research Record 1407, p.11-23, TRB.
MOOYMAN, Ken; QUIRION, Cheryl (1989) “High Production Kinematic GPS
Surveying” Surveying and Mapping, vol. 49, no.3, pp. 135-142.
MOUSKOS, Kyriacos C.; SUN, Wu; Qu, Tao (1999) “Impact of Access Driveways
on Accidents Rates at Multilane Highways” Final Report NJ-99-008-NCTIPS,
August, New Jersey Institute of Transportation, 80p.
NAGY, Dez (1978) “ Direct Gravity Formula for the Geodetic Reference System
1967” Bulletin Geodesique, vol. 52, pp. 159-164.
284
NARD, George Pierre; WEEMS, Lynn (1989) “GPS Geodesy and Kinematic
Topography Measurements and Results” Journal of Surveying Engennering,
vol.115, no.2, pp. 166-180, May.
NAVIN, Francis P. D. (1999) “Model for Road Safety Planning – Theory and Policy
Example” Transportation Research Record 1695, pp.49-54, TRB.
NEBOT, Eduardo M.; SALAH, Sukkarich; HUGH, Durrant-Whyte (1997) “Inertial
Navigation Aided with GPS Information” http:// mecharea.me.su.oz.au/ people/
nebot/ papers/ m2v_ins_gps/ m2v_ins_gps. html. Acesso em 14/10/1997
NEBOT, Eduardo M; HUGH, Durrant-Whyte (1997) “Inertial Calibration and
Alignment of na Inertial Navigation Unit” http:// mecharea.me.su.oz.au/ people/
nebot/ papers/ m2v_ins_gps/ m2v_ins_gps. html Acesso em 14/10/1997
NIX, Martin & SURV, M. (1996) “A Mobile Office for Surveyors” Proceedings of
International Archives of Photogrammetry and Remote Sensing, vol. XXXI, Part
B2, Vienna, pp.276-281.
NOVAK, Kurt (1995) “Mobile Mapping Technology for GIS Data Collection”
Photogrammetric Engineering & Remote Sensing, vol. 61, no. 5, pp.493-501,
May.
PARK, Heung Won; LEE, Jang Gyu; PARK, Chan Gook (1995) “Covariance
Analysis of Strapdown INS considering Gyrocompass Characteristics” IEEE
Transactions on Aerospace and Electronic Systems, vol. 33, no.1, pp. 320-328,
January
PARSONSON, Peter S. (2000) “Los Siete Defectos Más Peligrosos de las Carreteras
en EE.UU.” In: IV Congresso de Ingeniería Del Transporte – CIT 2000. Anais
(CD-ROOM). Valencia, Espanha
PELED, Ammatzia & HAKKERT, A Shalon (1993) “A PC-Oriented GIS
Application for Road Safety Analysis and Management” Traffic Engineering &
Control, July /August, pp. 355-361
285
PERALES, Mauricio J. Chisvert; ARCE, Jaime Sanmartin; RAMIREZ, Aniceto
Zaragoza; MOURIÑO, Rubén Ledesma; SOTO, Ma José Montegudo (2000)
“Calidad de los Datos sobre Accidentes de Tráfico. Estado Del Arte e
Implicaciones para la Seguridad Vial” In: IV Congresso de Ingeniería Del
Transporte – CIT 2000. Anais (CD-ROOM). Valencia, Espanha
PEREIRA, L.M. Gomes & JANSSEN, L.L.F.(1999) “Suitability of Laser Data for
DTM Generation: a Case Study in the Context of Road Planning and Design”
ISPRS Journal of Photogrammetry & Remote Sensing, no.54, pp.244-253.
PISARKI, Alan E. (1990) “Urban Workshop Report” Transportation Research
Record , no 1271, pp. 33, TRB
PRISLEY, Stephen & CARRUTH, J. Steven (2000) “GPS Speeds Data Collection
on GIS Road Networks”, 1995,
http://www.esri.com/library/userconf/proc95/to050/p040.html Acesso em
10/10/2000
QIAN, Liming (1996) “Building 3D GIS by Object-Orientation” MSc Thesis,
Publication #20088, Department of Geomactics Engineering, University of
Calgary, Calgary.
QUIROGA, Cesar A & BULLOCK, Darcy (1996) “Architecture of a Congestion
Management System for Controlled-Access Facilities” Transportation Research
Record , no 1551, pp. 105-113, TRB
RAUB, Richard A (1997) “Occurrence of Secondary Crashes on Urban Arterial
Roadways” Transportation Research Record, no 1581, pp.53-58, TRB
RAY, Malcolm H. (1994) “Safety Advisor: Framework for Performinig Roadside
Safety Assessments” Transportation Research Record 1468, TRB, p. 34-40.
SARICKS, Christopher L.; SCHOFER, Joseph L.; SÖÖT, Siim; BELELLA, Paul A
“Evaluating Effectiveness of Real Time Advanced Traveler Information Systems
Using a Small Test Vehicle Fleet” Transportation Research Record , no 1588,
pp. 41-48, TRB
286
SAYERS, M. W. & KARAMIHAS, S. M. (1997) "The Little Book of Profiling"
http://www.umtri.umich.edu/erd/roughness/litbook.html Aceeso em 10/07/1998
SCHERZINGER, Bruno M.; HUTTON, Joseph J.; McMILAN, J.C. (1997) “Low
cost Inertial/GPS Integrated position and Orientation System for Marine
Applications” IEEE AES Systems Magazine, vol. 12, no. 5, pp 15-19, May.
SCHWARZ, K. P. (1990a) “Kinematic Positiong - Efficient New Tool for
Surveying” Journal of Surveying Engineering , vol. 116, no. 4, pp. 181-192,
November.
SCHWARZ, K.P. (1990b) "Inertial Technology" In Assessment of Emerging
Technologies for Future Navigation Systems in Transportation Sector, UCSE
Reports Number 60007.
SEEBER, Günter (1993) Satellite Geodesy Foundation Methods, and Application ,
New York, Editora Walter de Gruyter.
SHRESTHA, Ramesh; CAMPBELL, Mike; PIAZZA, Alex (1994) “A Global
Positioning System Base Station and Session Length for 1-m Accuracy”
Surveying and Land Information Systems, vol.54, no.1, pp. 51-57.
SNYDER, Scott (1994) “INS/GPS Operational Concept Demonstration (OCD)
High Gear Program” IEEE AES Magazine, vol.9, no.8, pp.38-44, January
STAMATIADIS, Nikiforos & ALLEN, David L. (1997) “Seasonal Factors Using
Vehicle Classification Data” Transportation Research Record, no 1593, pp.23-
28, TRB
STOKES, Robert W. & MUTABAZI, Madaniyo.(1996) “Rate-Quality control
method of Identifying hazardous Road Locations” Transportation Research
Record , no 1542, pp. 44-48, TRB
SUN, Huangqi (1994) GPS/INS Integration of Airbone Applications, M.Sc Thesis,
Publication #20069, Department of Geomatics Engineering, University of
Calgary, Calgary.
287
TALARICO, R. J. & MORRALL, J. F. (1994) “The cost-effectiveness of curve
flattening in Alberta” Canadian Journal of Civil Engeneering, vol. 21, no. 2,
pp.285-296, April.
TARKO, Andrzej P.; SINHA, Kumares C.; FAROOQ, Omer (1996) “Methodology
for Identifying Highway Safety Problems Areas” Transportation Research
Record , no 1542, pp. 49-53, TRB
THOMAS, Isabelle (1996) “Spatial Data Aggregation: Exploratory Analysis of Road
Accidents” Accident Analysis and Prevention, vol.28, no. 2, pp 251-264.
U. S. NATIONAL ACADEMY OF SCIENCE TRB (1987) Designing Safer Roads
Practices for Resurfacing, Restoration, and Rehabilitation, Special Report 214,
Washington, D.C, pp.77-109, TRB.
UPADHYAY, Triveni; COTTERILL, Stephen; DEATON, A W. (1993)
“Autonomous GPS/INS navigation Experiment for Space Transfer Vehicle”
IEEE Transactions on Aerospace and Electronic Systems, vol. 29, no. 3, pp.772-
785, July.
WEI, Zhou & SUN, Xiaoduan (1999) “Highway Accident Analysis by Grey System
Theory” In: Proceedings of Enhancing Transportation Safety in the 21st
Century: New Tools for Transportation Professionals- ITE International
Conference (CD-ROOM) , March 28-31, Kissimmee, Flórida, USA.
WEISS, J. David (1996) “Analysis of Upgraded GPS Internal Kalman Filter” IEEE
AES Magazine, vol.11, no.1, pp.23-26, January
ZHOU, Min & SISIOPIKU, Virginia P. (1997) “Relationship Between Volume-to-
Capacity Ratios and Accident Rates” Transportation Research Record, no 1581,
pp.47-52, TRB.
APÊNDICE I
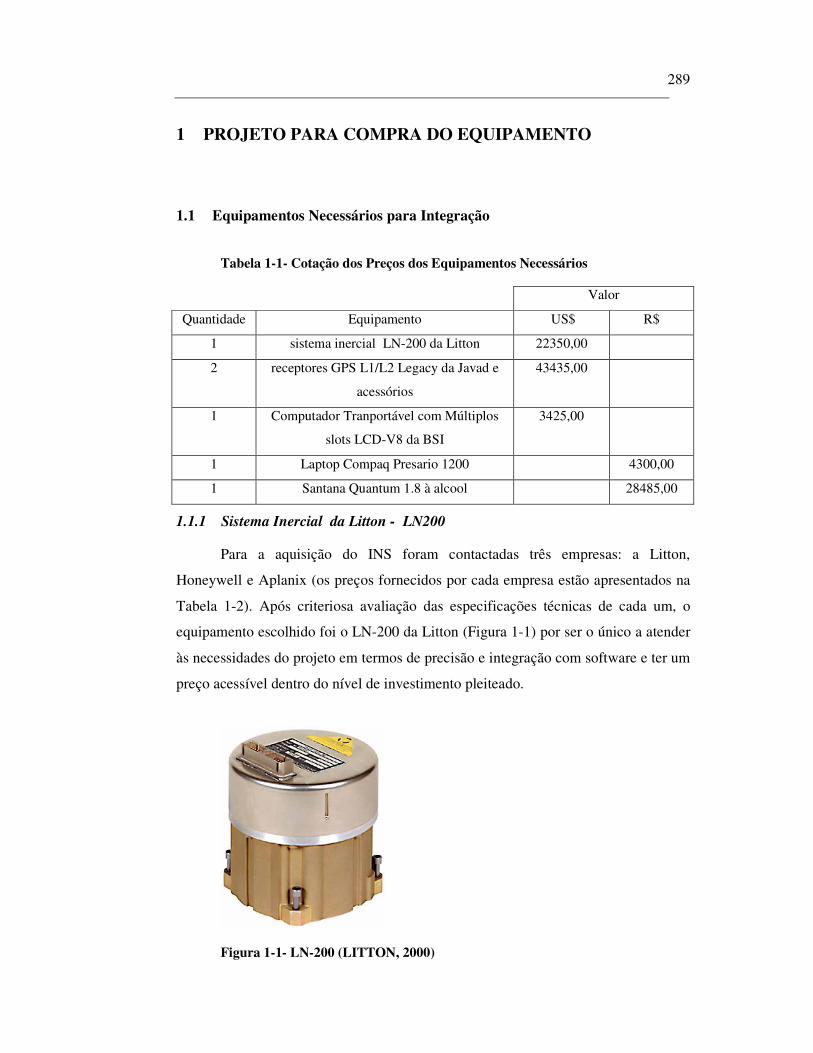
289
1 PROJETO PARA COMPRA DO EQUIPAMENTO
1.1 Equipamentos Necessários para Integração
Tabela 1-1- Cotação dos Preços dos Equipamentos Necessários
Valor
Quantidade Equipamento US$ R$
1 sistema inercial LN-200 da Litton 22350,00
2 receptores GPS L1/L2 Legacy da Javad e
acessórios
43435,00
1 Computador Tranportável com Múltiplos
slots LCD-V8 da BSI
3425,00
1 Laptop Compaq Presario 1200 4300,00
1 Santana Quantum 1.8 à alcool 28485,00
1.1.1 Sistema Inercial da Litton - LN200
Para a aquisição do INS foram contactadas três empresas: a Litton,
Honeywell e Aplanix (os preços fornecidos por cada empresa estão apresentados na
Tabela 1-2). Após criteriosa avaliação das especificações técnicas de cada um, o
equipamento escolhido foi o LN-200 da Litton (Figura 1-1) por ser o único a atender
às necessidades do projeto em termos de precisão e integração com software e ter um
preço acessível dentro do nível de investimento pleiteado.
Figura 1-1- LN-200 (LITTON, 2000)
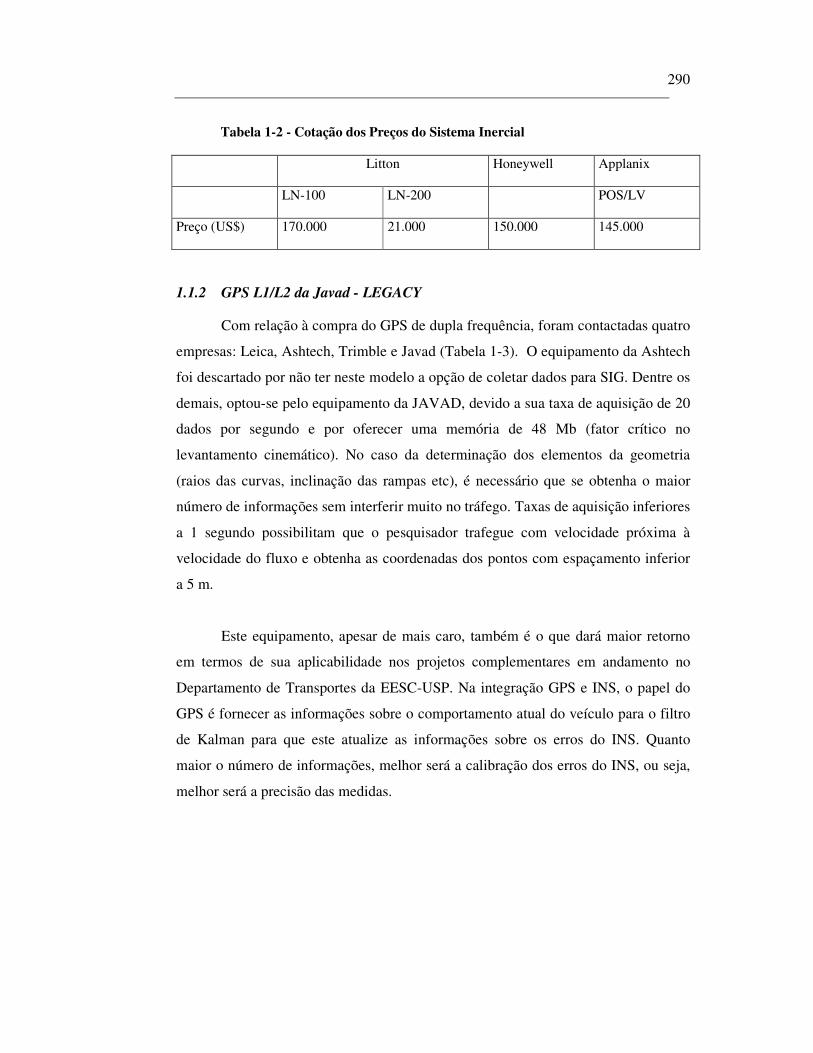
290
Tabela 1-2 - Cotação dos Preços do Sistema Inercial
Litton Honeywell Applanix
LN-100 LN-200 POS/LV
Preço (US$) 170.000 21.000 150.000 145.000
1.1.2 GPS L1/L2 da Javad - LEGACY
Com relação à compra do GPS de dupla frequência, foram contactadas quatro
empresas: Leica, Ashtech, Trimble e Javad (Tabela 1-3). O equipamento da Ashtech
foi descartado por não ter neste modelo a opção de coletar dados para SIG. Dentre os
demais, optou-se pelo equipamento da JAVAD, devido a sua taxa de aquisição de 20
dados por segundo e por oferecer uma memória de 48 Mb (fator crítico no
levantamento cinemático). No caso da determinação dos elementos da geometria
(raios das curvas, inclinação das rampas etc), é necessário que se obtenha o maior
número de informações sem interferir muito no tráfego. Taxas de aquisição inferiores
a 1 segundo possibilitam que o pesquisador trafegue com velocidade próxima à
velocidade do fluxo e obtenha as coordenadas dos pontos com espaçamento inferior
a 5 m.
Este equipamento, apesar de mais caro, também é o que dará maior retorno
em termos de sua aplicabilidade nos projetos complementares em andamento no
Departamento de Transportes da EESC-USP. Na integração GPS e INS, o papel do
GPS é fornecer as informações sobre o comportamento atual do veículo para o filtro
de Kalman para que este atualize as informações sobre os erros do INS. Quanto
maior o número de informações, melhor será a calibração dos erros do INS, ou seja,
melhor será a precisão das medidas.
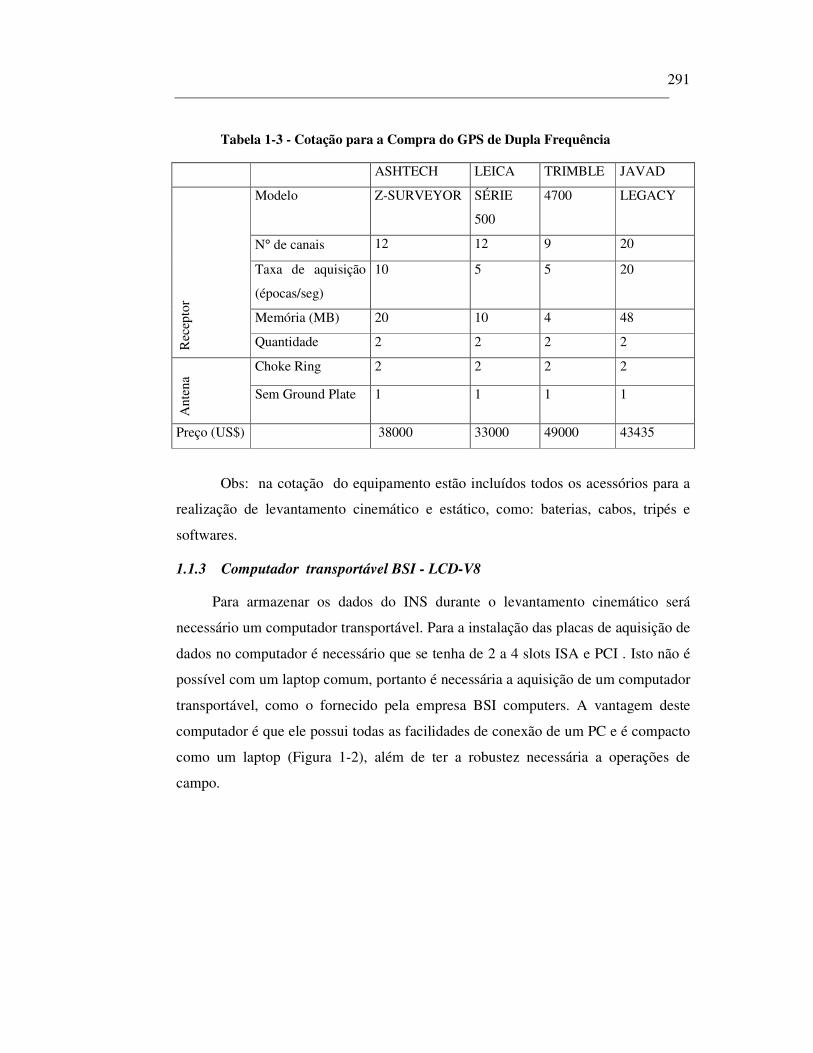
291
Tabela 1-3 - Cotação para a Compra do GPS de Dupla Frequência
ASHTECH LEICA TRIMBLE JAVAD
Modelo Z-SURVEYOR SÉRIE
500
4700 LEGACY
N° de canais 12 12 9 20
Taxa de aquisição
(épocas/seg)
10 5 5 20
Memória (MB) 20 10 4 48
Rec
epto
r
Quantidade 2 2 2 2
Choke Ring 2 2 2 2
Ant
ena
Sem Ground Plate 1 1 1 1
Preço (US$) 38000 33000 49000 43435
Obs: na cotação do equipamento estão incluídos todos os acessórios para a
realização de levantamento cinemático e estático, como: baterias, cabos, tripés e
softwares.
1.1.3 Computador transportável BSI - LCD-V8
Para armazenar os dados do INS durante o levantamento cinemático será
necessário um computador transportável. Para a instalação das placas de aquisição de
dados no computador é necessário que se tenha de 2 a 4 slots ISA e PCI . Isto não é
possível com um laptop comum, portanto é necessária a aquisição de um computador
transportável, como o fornecido pela empresa BSI computers. A vantagem deste
computador é que ele possui todas as facilidades de conexão de um PC e é compacto
como um laptop (Figura 1-2), além de ter a robustez necessária a operações de
campo.
292
Figura 1-2 - Modelo LCD-V8 da BSI Computers (BSI, 2000)
Será adquirido um computador com as seguinte configuração:
� Intel Pentium III , 500 MHZ
� 64 MB ram
� HD de 10 GB
Também serão necessárias:
1. Placa de comunicação entre IMU e PC:
- Designação: RISCom/N2d (inclui duas portas);
- Versão: 800015-G06 (as duas portas são do tipo RS-422);
- Preço: US$739,
- Contacto: ImageStream Internet Solutions;
2. Placa de sincronismo:
- Designação: GT401 Event Timing Controller;
- Versão: GT401 Event Timing Controller, 5 ppm;
- Preço: US$ 1435 ;
- Contacto: Guide Technology, Inc.;
APÊNDICE II
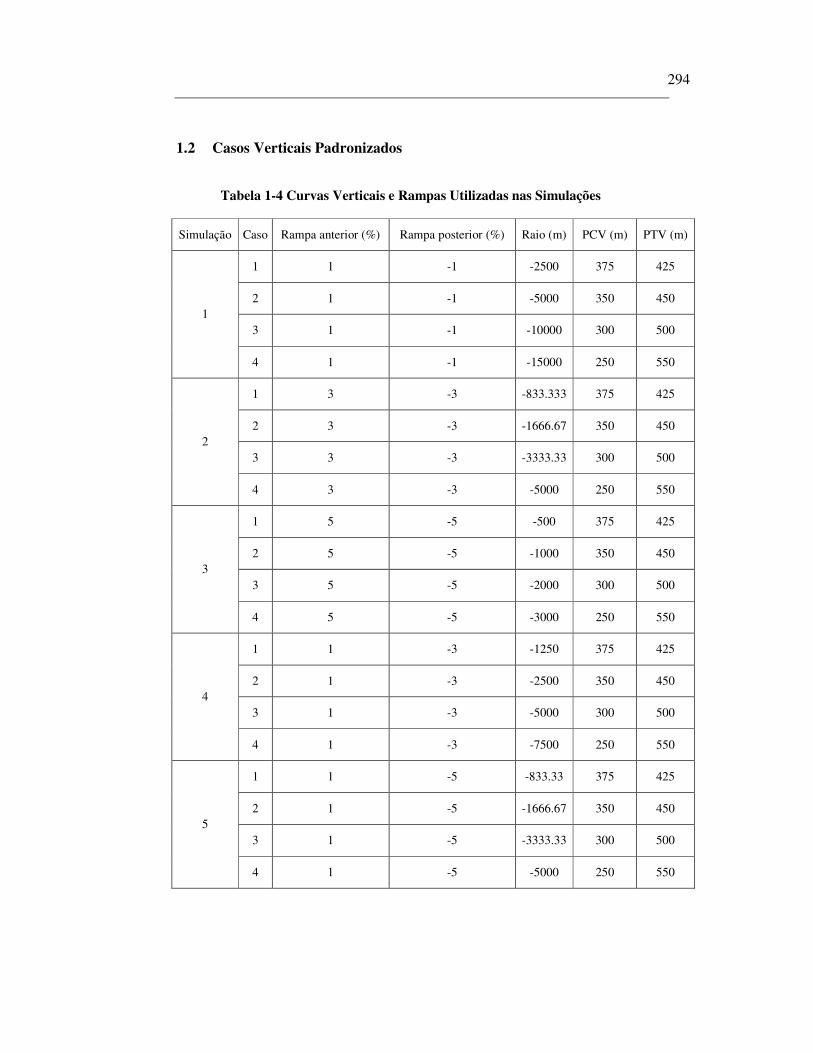
294
1.2 Casos Verticais Padronizados
Tabela 1-4 Curvas Verticais e Rampas Utilizadas nas Simulações
Simulação Caso Rampa anterior (%) Rampa posterior (%) Raio (m) PCV (m) PTV (m)
1 1 -1 -2500 375 425
2 1 -1 -5000 350 450
3 1 -1 -10000 300 500 1
4 1 -1 -15000 250 550
1 3 -3 -833.333 375 425
2 3 -3 -1666.67 350 450
3 3 -3 -3333.33 300 500 2
4 3 -3 -5000 250 550
1 5 -5 -500 375 425
2 5 -5 -1000 350 450
3 5 -5 -2000 300 500 3
4 5 -5 -3000 250 550
1 1 -3 -1250 375 425
2 1 -3 -2500 350 450
3 1 -3 -5000 300 500 4
4 1 -3 -7500 250 550
1 1 -5 -833.33 375 425
2 1 -5 -1666.67 350 450
3 1 -5 -3333.33 300 500 5
4 1 -5 -5000 250 550
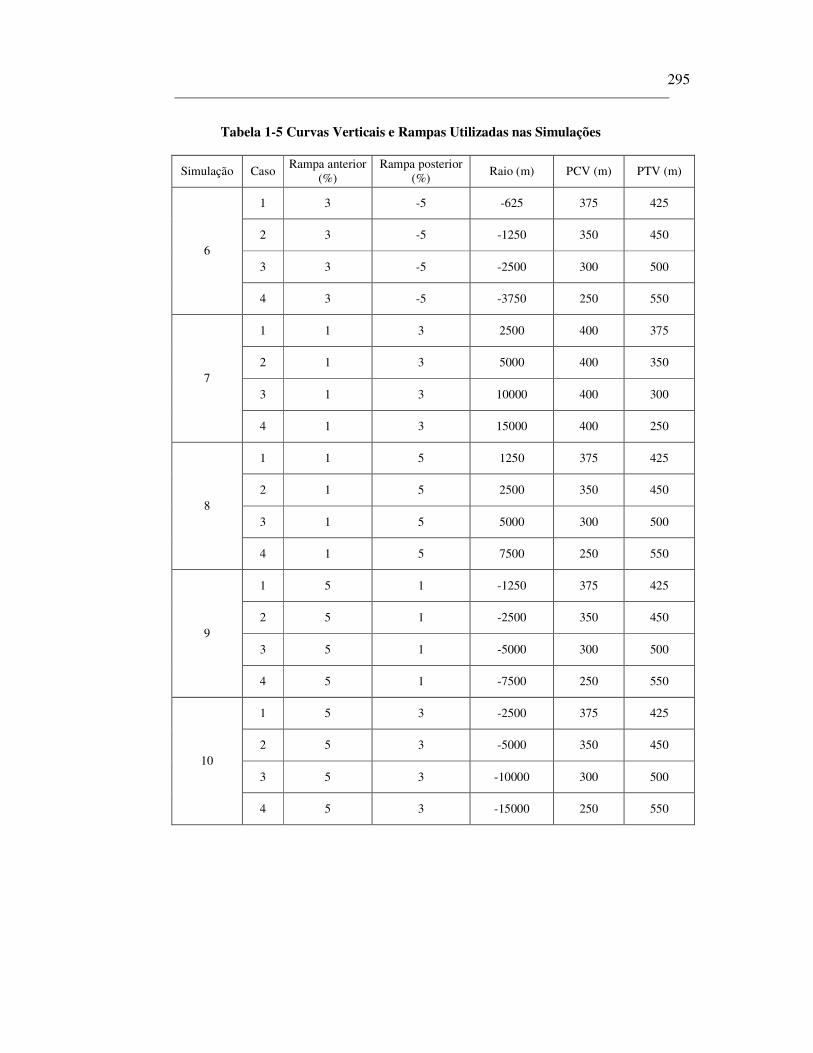
295
Tabela 1-5 Curvas Verticais e Rampas Utilizadas nas Simulações
Simulação Caso Rampa anterior
(%) Rampa posterior
(%) Raio (m) PCV (m) PTV (m)
1 3 -5 -625 375 425
2 3 -5 -1250 350 450
3 3 -5 -2500 300 500 6
4 3 -5 -3750 250 550
1 1 3 2500 400 375
2 1 3 5000 400 350
3 1 3 10000 400 300 7
4 1 3 15000 400 250
1 1 5 1250 375 425
2 1 5 2500 350 450
3 1 5 5000 300 500 8
4 1 5 7500 250 550
1 5 1 -1250 375 425
2 5 1 -2500 350 450
3 5 1 -5000 300 500 9
4 5 1 -7500 250 550
1 5 3 -2500 375 425
2 5 3 -5000 350 450
3 5 3 -10000 300 500 10
4 5 3 -15000 250 550
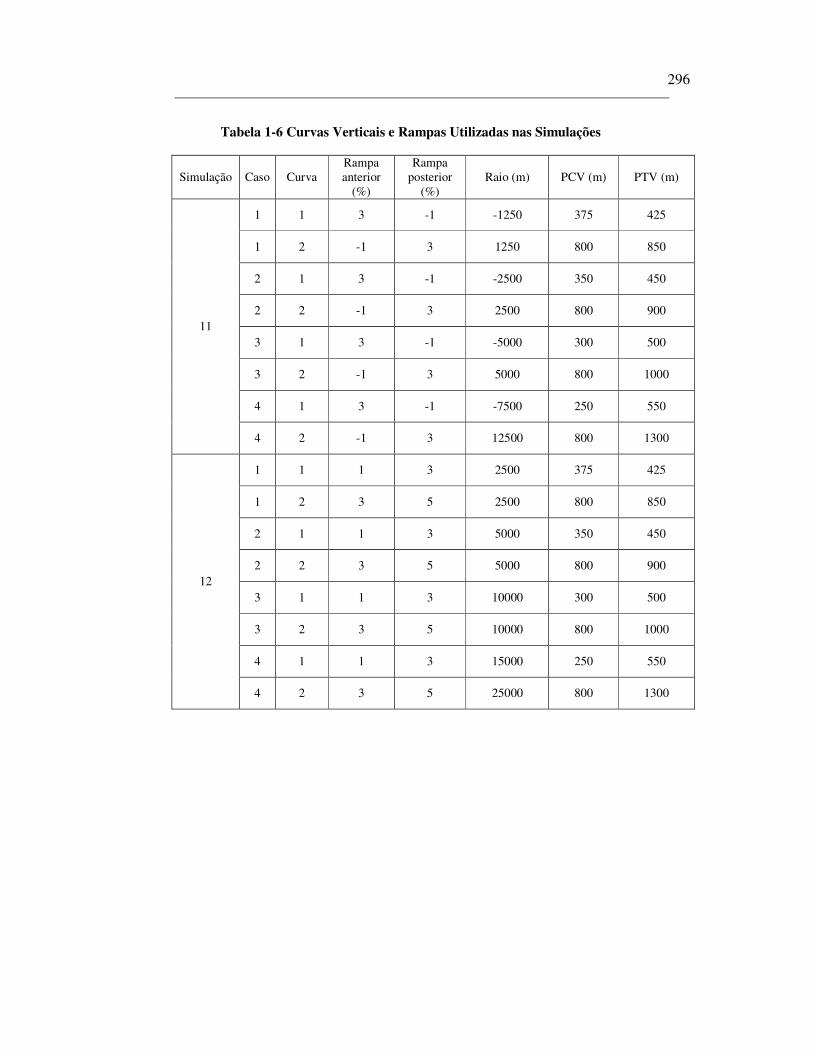
296
Tabela 1-6 Curvas Verticais e Rampas Utilizadas nas Simulações
Simulação Caso Curva Rampa anterior
(%)
Rampa posterior
(%) Raio (m) PCV (m) PTV (m)
1 1 3 -1 -1250 375 425
1 2 -1 3 1250 800 850
2 1 3 -1 -2500 350 450
2 2 -1 3 2500 800 900
3 1 3 -1 -5000 300 500
3 2 -1 3 5000 800 1000
4 1 3 -1 -7500 250 550
11
4 2 -1 3 12500 800 1300
1 1 1 3 2500 375 425
1 2 3 5 2500 800 850
2 1 1 3 5000 350 450
2 2 3 5 5000 800 900
3 1 1 3 10000 300 500
3 2 3 5 10000 800 1000
4 1 1 3 15000 250 550
12
4 2 3 5 25000 800 1300
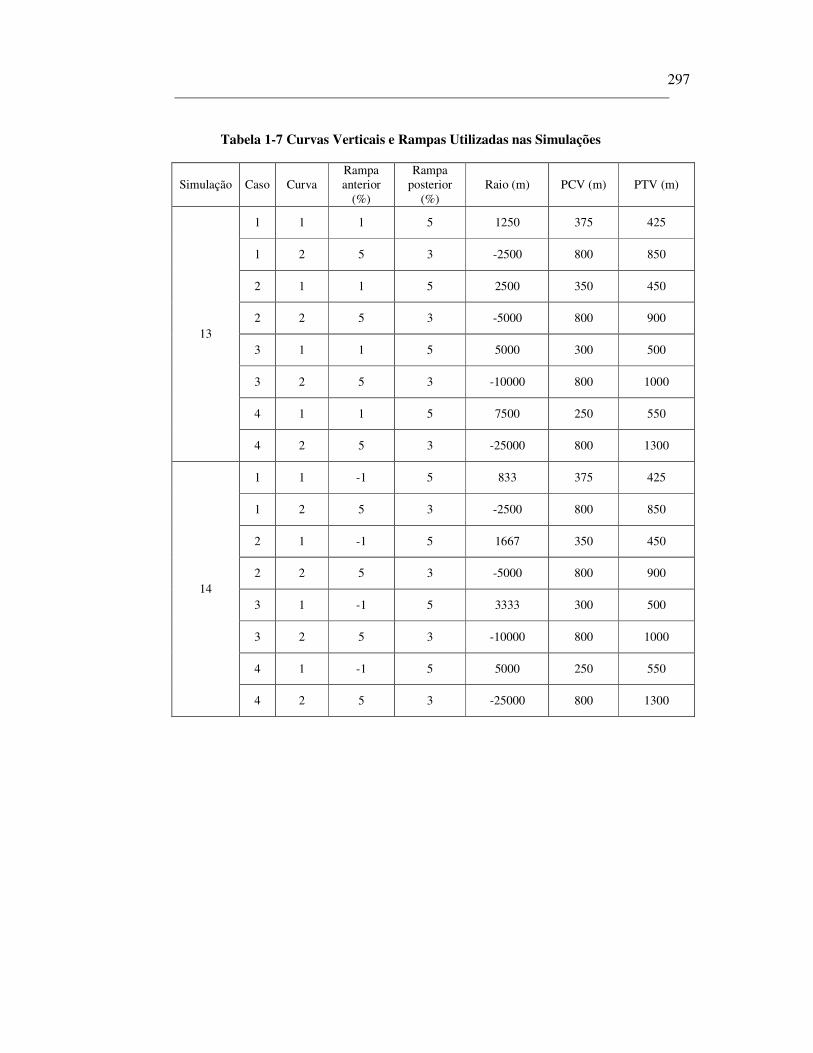
297
Tabela 1-7 Curvas Verticais e Rampas Utilizadas nas Simulações
Simulação Caso Curva Rampa anterior
(%)
Rampa posterior
(%) Raio (m) PCV (m) PTV (m)
1 1 1 5 1250 375 425
1 2 5 3 -2500 800 850
2 1 1 5 2500 350 450
2 2 5 3 -5000 800 900
3 1 1 5 5000 300 500
3 2 5 3 -10000 800 1000
4 1 1 5 7500 250 550
13
4 2 5 3 -25000 800 1300
1 1 -1 5 833 375 425
1 2 5 3 -2500 800 850
2 1 -1 5 1667 350 450
2 2 5 3 -5000 800 900
3 1 -1 5 3333 300 500
3 2 5 3 -10000 800 1000
4 1 -1 5 5000 250 550
14
4 2 5 3 -25000 800 1300
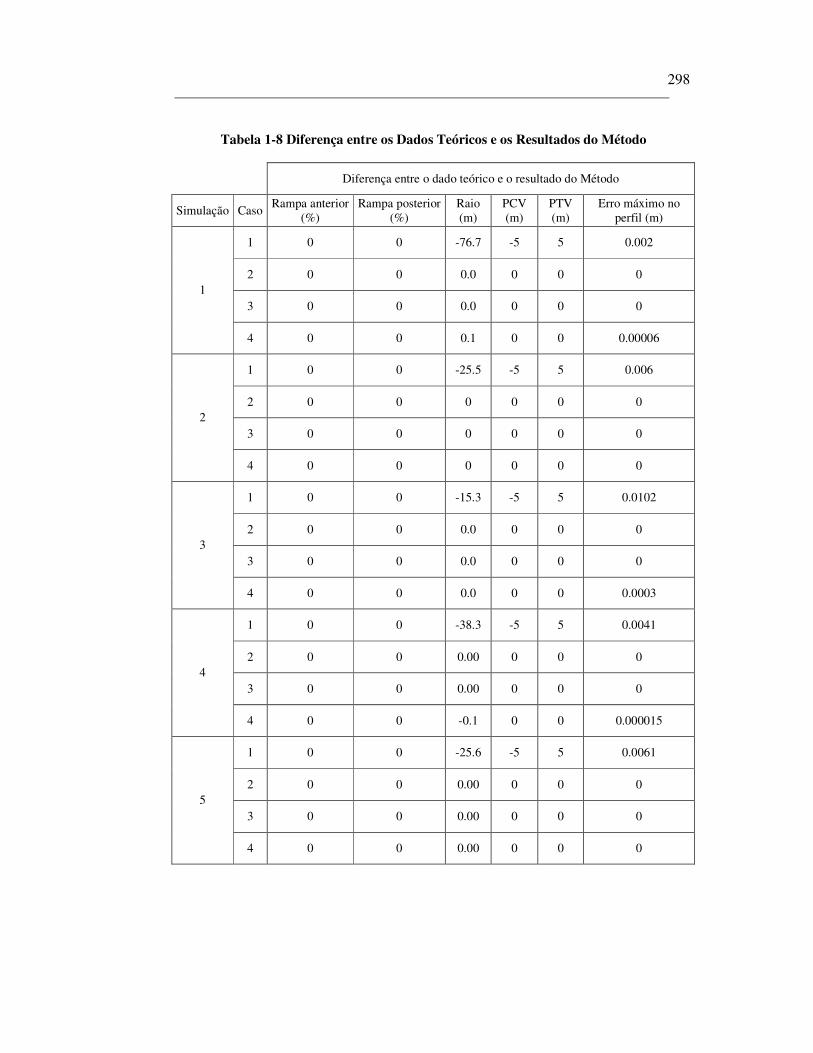
298
Tabela 1-8 Diferença entre os Dados Teóricos e os Resultados do Método
Diferença entre o dado teórico e o resultado do Método
Simulação Caso Rampa anterior
(%) Rampa posterior
(%) Raio (m)
PCV (m)
PTV (m)
Erro máximo no perfil (m)
1 0 0 -76.7 -5 5 0.002
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 1
4 0 0 0.1 0 0 0.00006
1 0 0 -25.5 -5 5 0.006
2 0 0 0 0 0 0
3 0 0 0 0 0 0 2
4 0 0 0 0 0 0
1 0 0 -15.3 -5 5 0.0102
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 3
4 0 0 0.0 0 0 0.0003
1 0 0 -38.3 -5 5 0.0041
2 0 0 0.00 0 0 0
3 0 0 0.00 0 0 0 4
4 0 0 -0.1 0 0 0.000015
1 0 0 -25.6 -5 5 0.0061
2 0 0 0.00 0 0 0
3 0 0 0.00 0 0 0 5
4 0 0 0.00 0 0 0
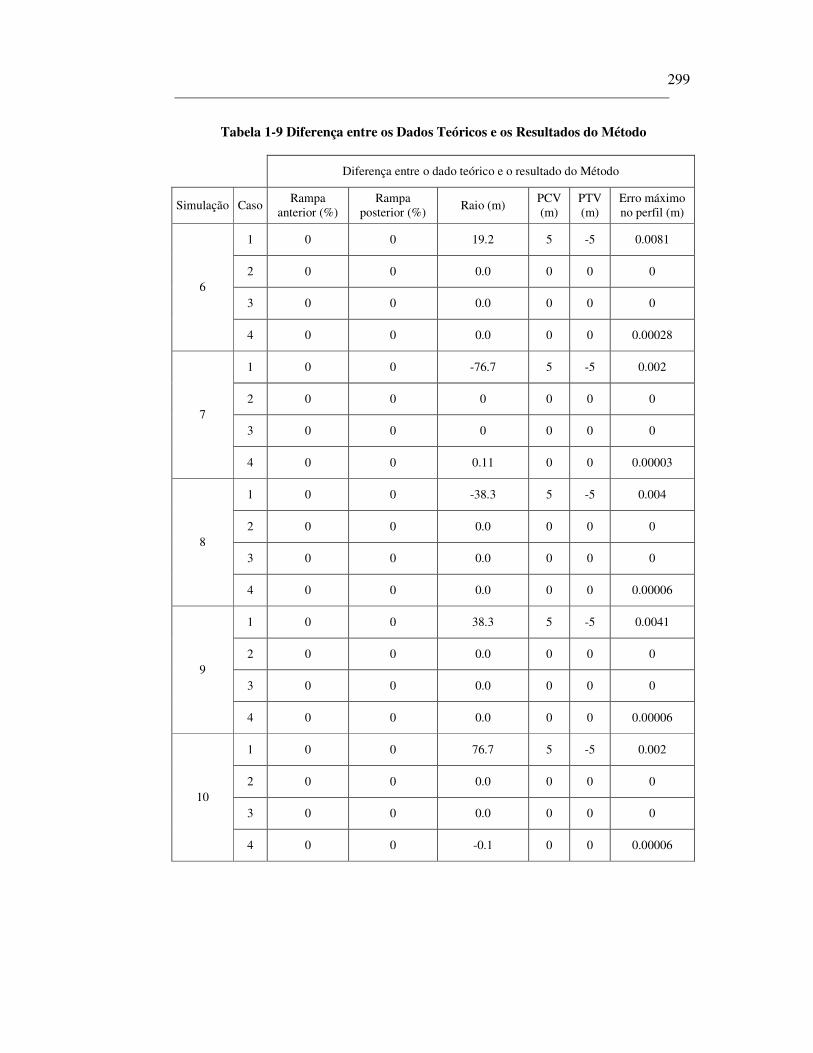
299
Tabela 1-9 Diferença entre os Dados Teóricos e os Resultados do Método
Diferença entre o dado teórico e o resultado do Método
Simulação Caso Rampa
anterior (%) Rampa
posterior (%) Raio (m)
PCV (m)
PTV (m)
Erro máximo no perfil (m)
1 0 0 19.2 5 -5 0.0081
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 6
4 0 0 0.0 0 0 0.00028
1 0 0 -76.7 5 -5 0.002
2 0 0 0 0 0 0
3 0 0 0 0 0 0 7
4 0 0 0.11 0 0 0.00003
1 0 0 -38.3 5 -5 0.004
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 8
4 0 0 0.0 0 0 0.00006
1 0 0 38.3 5 -5 0.0041
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 9
4 0 0 0.0 0 0 0.00006
1 0 0 76.7 5 -5 0.002
2 0 0 0.0 0 0 0
3 0 0 0.0 0 0 0 10
4 0 0 -0.1 0 0 0.00006
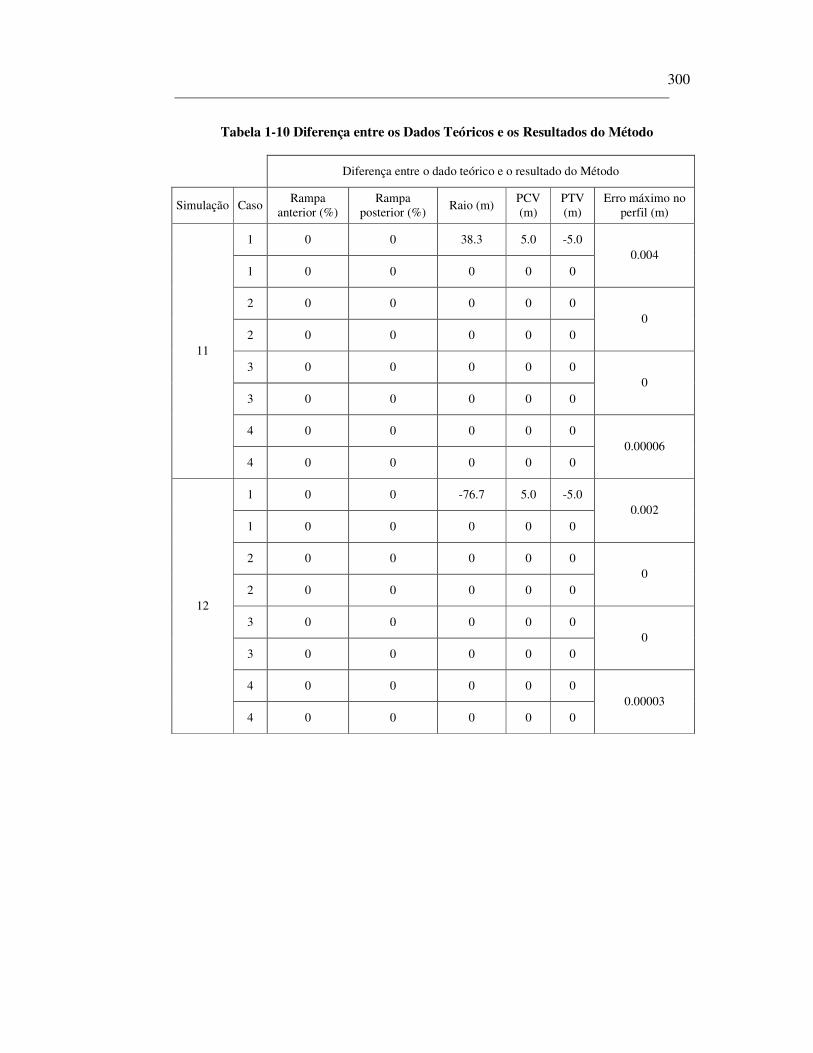
300
Tabela 1-10 Diferença entre os Dados Teóricos e os Resultados do Método
Diferença entre o dado teórico e o resultado do Método
Simulação Caso Rampa
anterior (%) Rampa
posterior (%) Raio (m)
PCV (m)
PTV (m)
Erro máximo no perfil (m)
1 0 0 38.3 5.0 -5.0
1 0 0 0 0 0 0.004
2 0 0 0 0 0
2 0 0 0 0 0 0
3 0 0 0 0 0
3 0 0 0 0 0 0
4 0 0 0 0 0
11
4 0 0 0 0 0 0.00006
1 0 0 -76.7 5.0 -5.0
1 0 0 0 0 0 0.002
2 0 0 0 0 0
2 0 0 0 0 0 0
3 0 0 0 0 0
3 0 0 0 0 0 0
4 0 0 0 0 0
12
4 0 0 0 0 0 0.00003
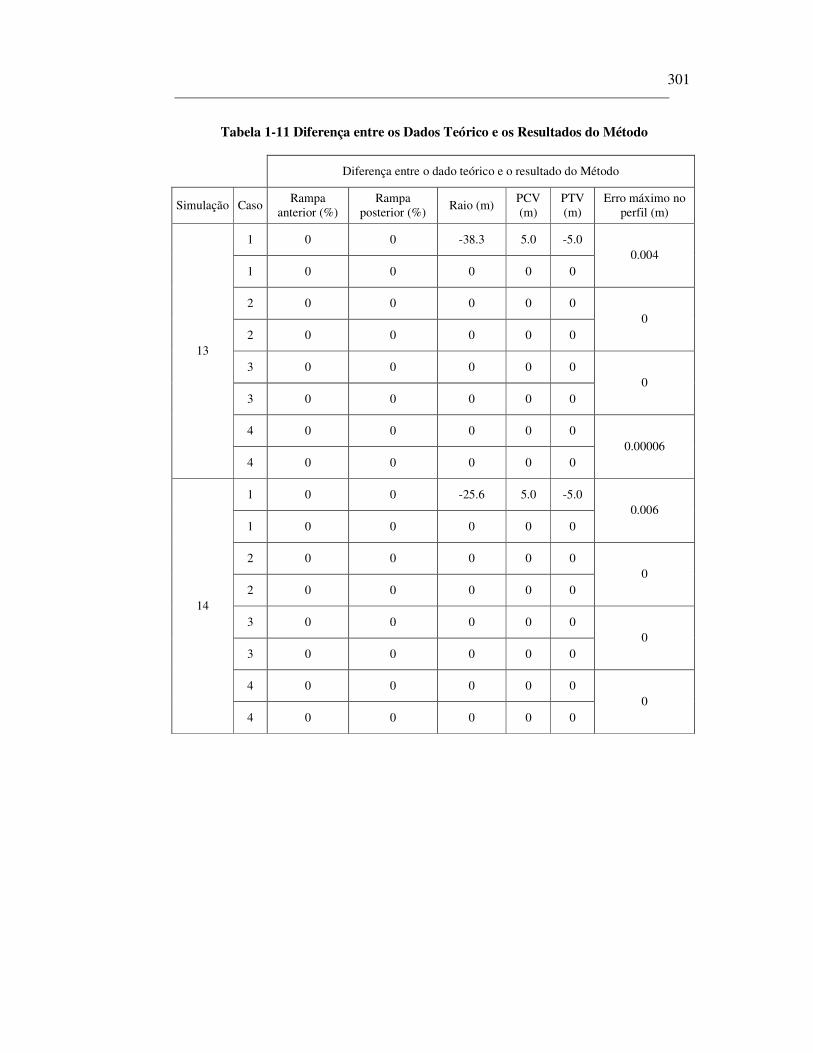
301
Tabela 1-11 Diferença entre os Dados Teórico e os Resultados do Método
Diferença entre o dado teórico e o resultado do Método
Simulação Caso Rampa
anterior (%) Rampa
posterior (%) Raio (m)
PCV (m)
PTV (m)
Erro máximo no perfil (m)
1 0 0 -38.3 5.0 -5.0
1 0 0 0 0 0 0.004
2 0 0 0 0 0
2 0 0 0 0 0 0
3 0 0 0 0 0
3 0 0 0 0 0 0
4 0 0 0 0 0
13
4 0 0 0 0 0 0.00006
1 0 0 -25.6 5.0 -5.0
1 0 0 0 0 0 0.006
2 0 0 0 0 0
2 0 0 0 0 0 0
3 0 0 0 0 0
3 0 0 0 0 0 0
4 0 0 0 0 0
14
4 0 0 0 0 0 0
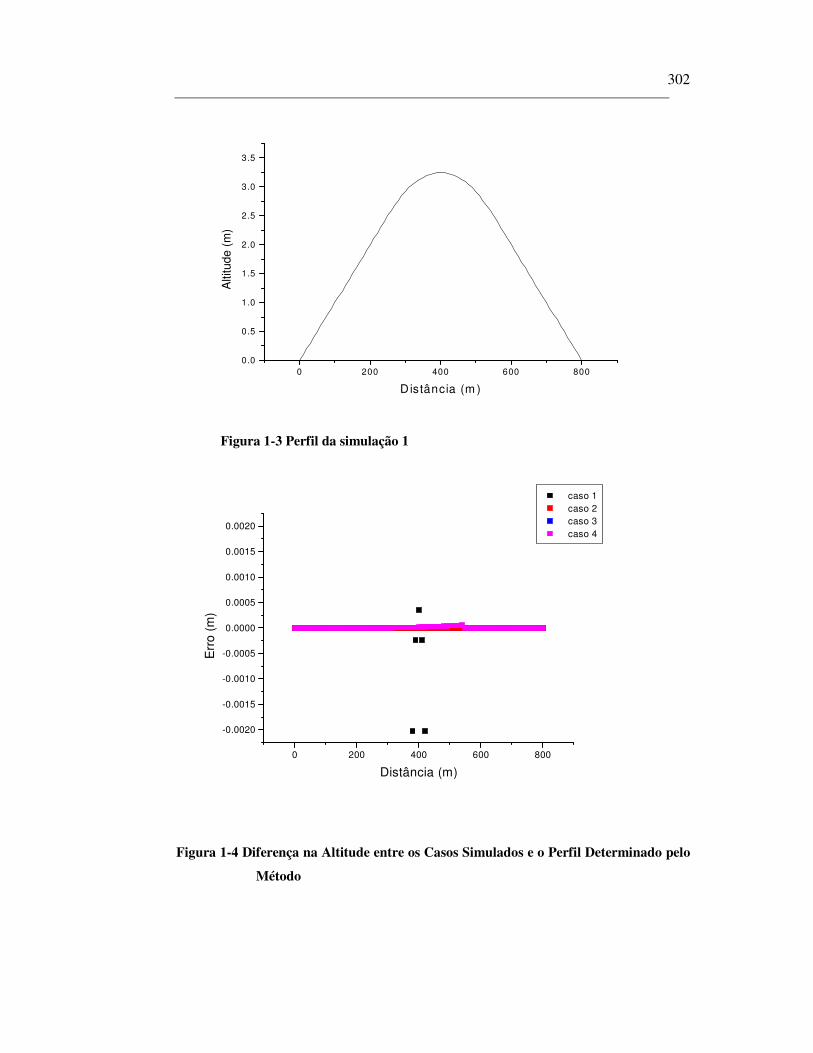
302
0 200 400 600 8000.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Alti
tude
(m
)
D istância (m )
Figura 1-3 Perfil da simulação 1
0 200 400 600 800
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
0.0020
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-4 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado pelo
Método
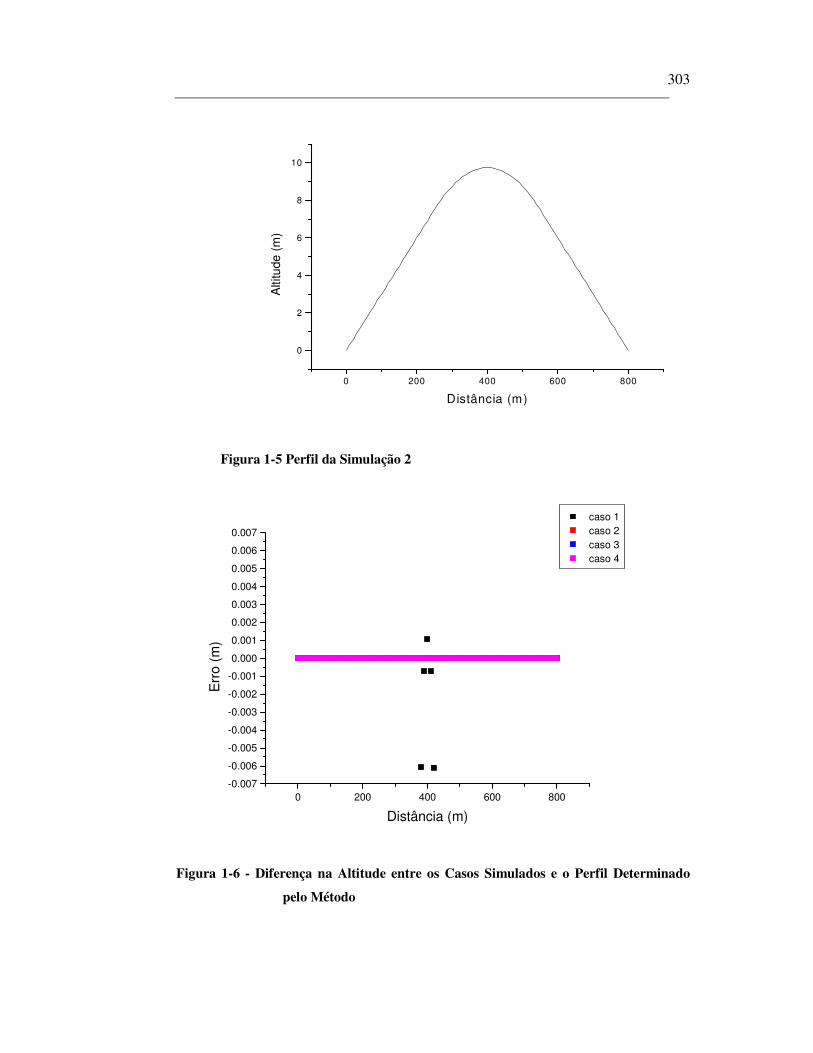
303
0 200 400 600 800
0
2
4
6
8
10
Alti
tude
(m
)
Distância (m)
Figura 1-5 Perfil da Simulação 2
0 200 400 600 800-0.007
-0.006
-0.005
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
0.005
0.006
0.007
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-6 - Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
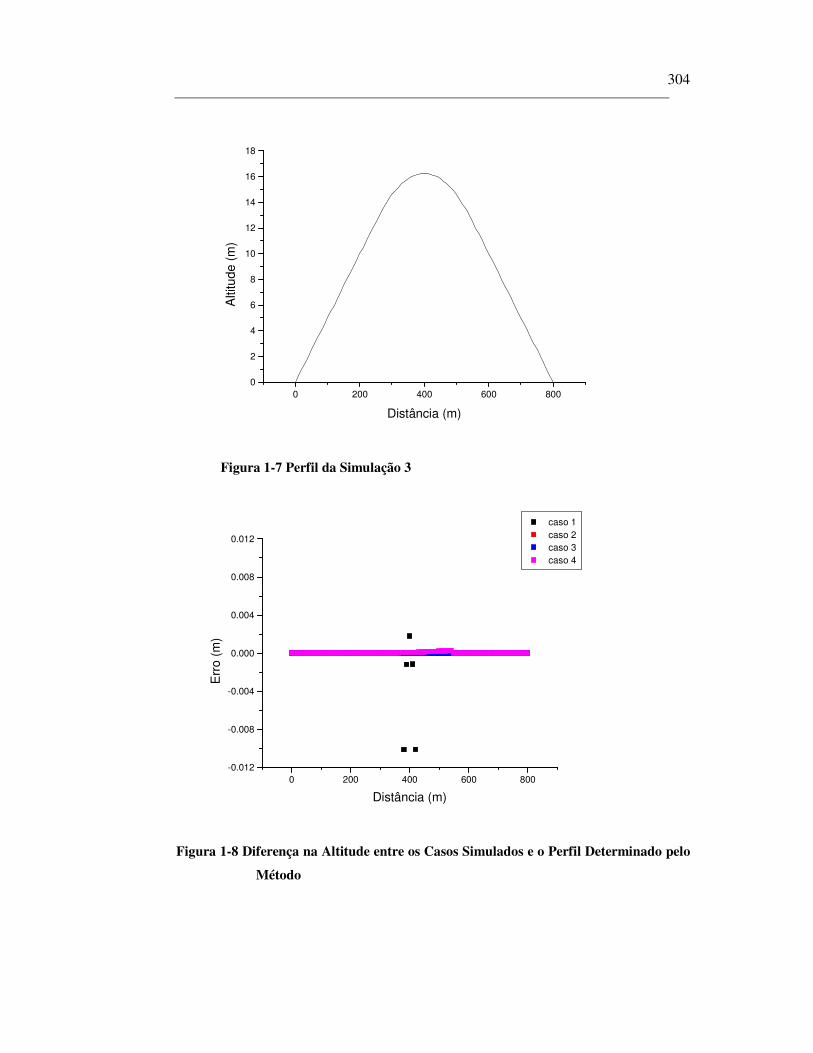
304
0 200 400 600 8000
2
4
6
8
10
12
14
16
18
Alti
tude
(m
)
Distância (m)
Figura 1-7 Perfil da Simulação 3
0 200 400 600 800-0.012
-0.008
-0.004
0.000
0.004
0.008
0.012
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-8 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado pelo
Método
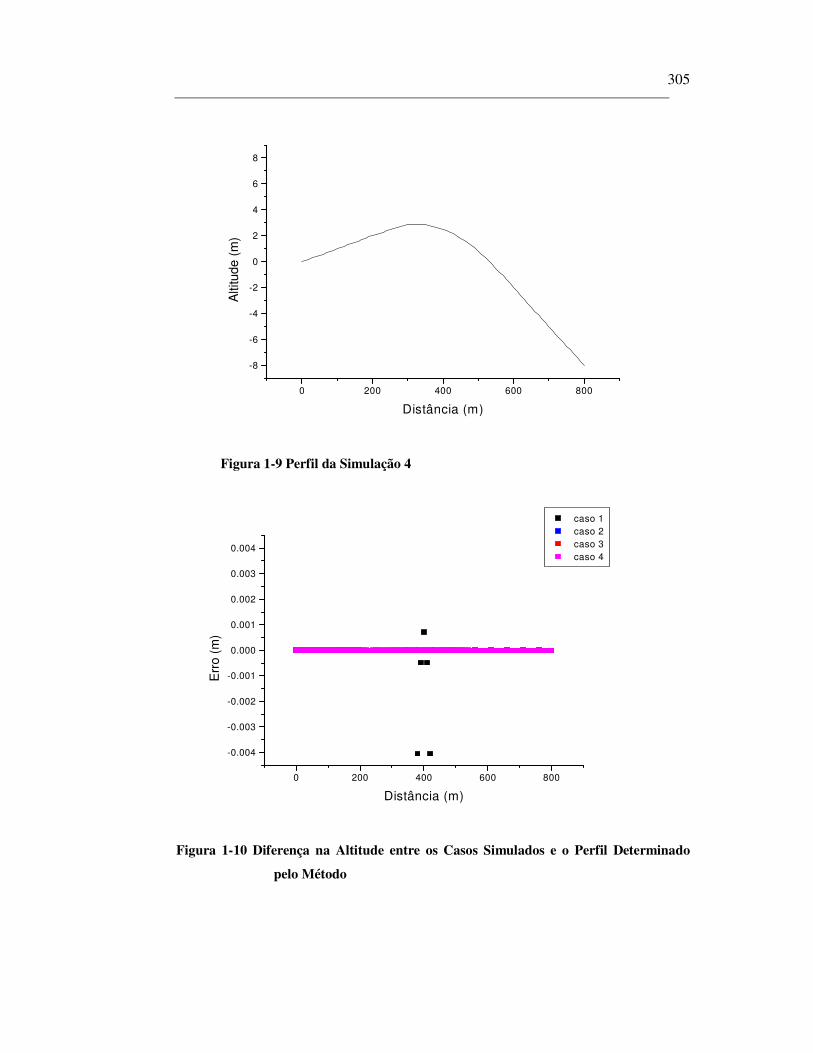
305
0 200 400 600 800
-8
-6
-4
-2
0
2
4
6
8
Alti
tude
(m
)
Distância (m)
Figura 1-9 Perfil da Simulação 4
0 200 400 600 800
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-10 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
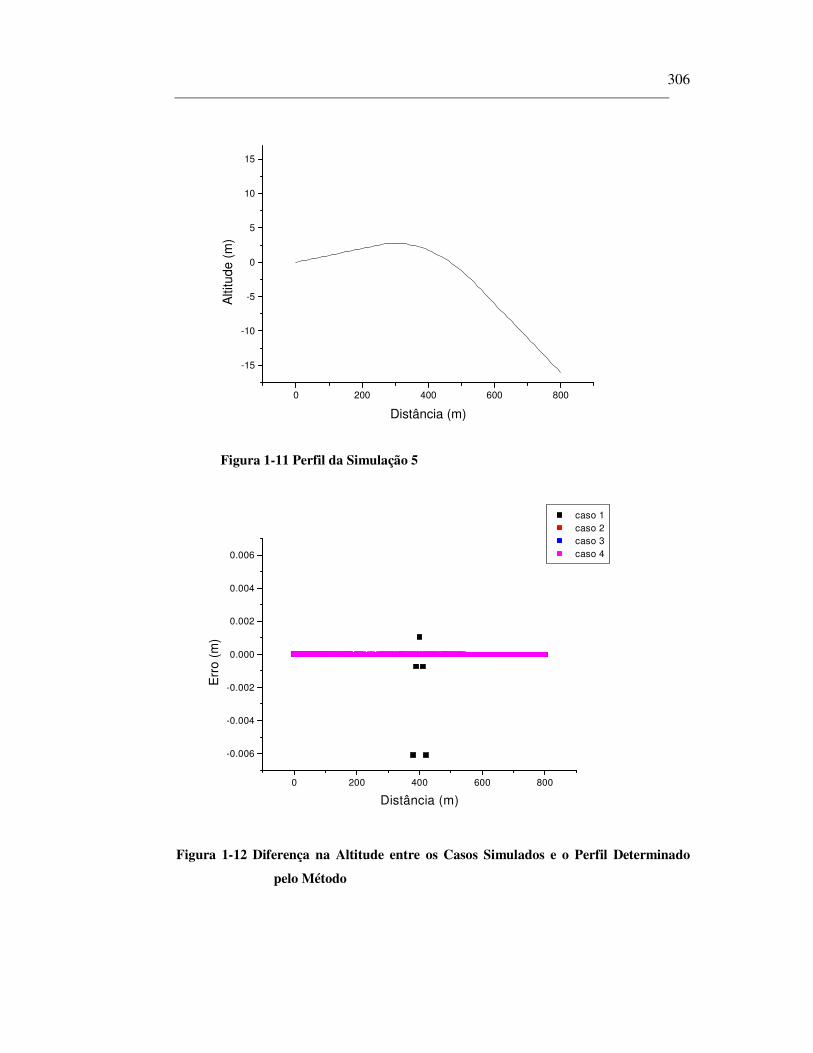
306
0 200 400 600 800
-15
-10
-5
0
5
10
15
Alti
tude
(m
)
Distância (m)
Figura 1-11 Perfil da Simulação 5
0 200 400 600 800
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.006
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-12 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
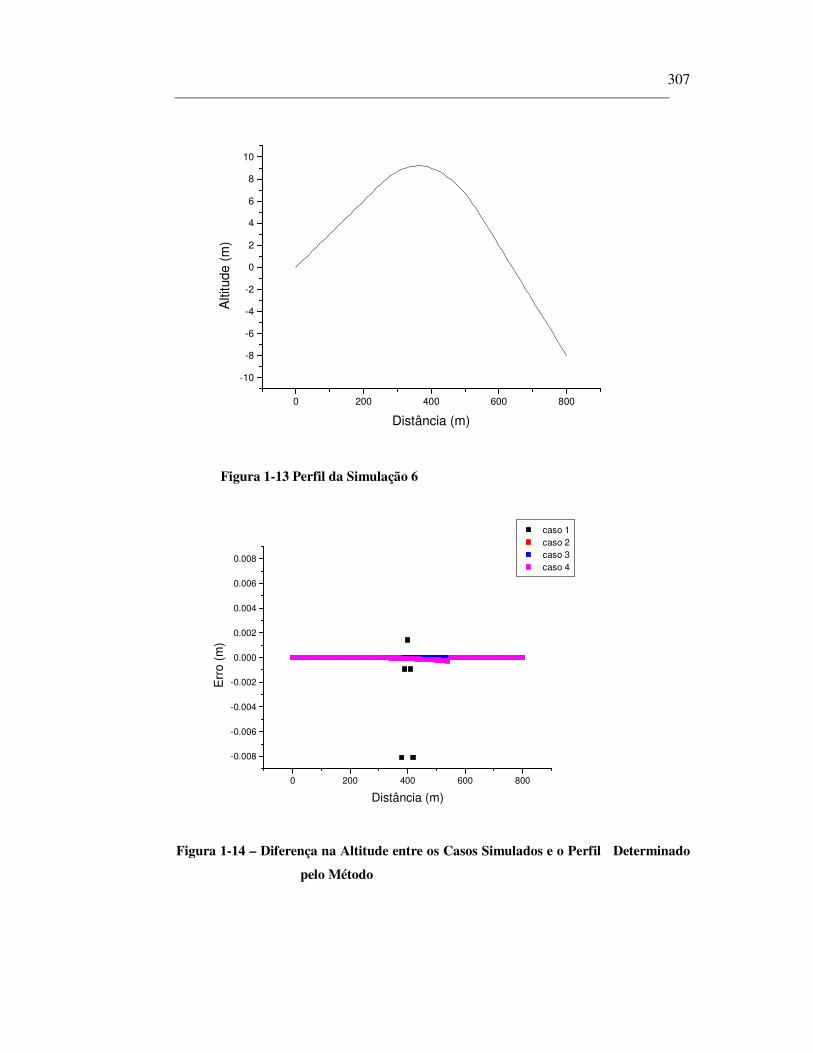
307
0 200 400 600 800
-10
-8
-6
-4
-2
0
2
4
6
8
10
Alti
tude
(m
)
Distância (m)
Figura 1-13 Perfil da Simulação 6
0 200 400 600 800
-0.008
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.006
0.008
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-14 – Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
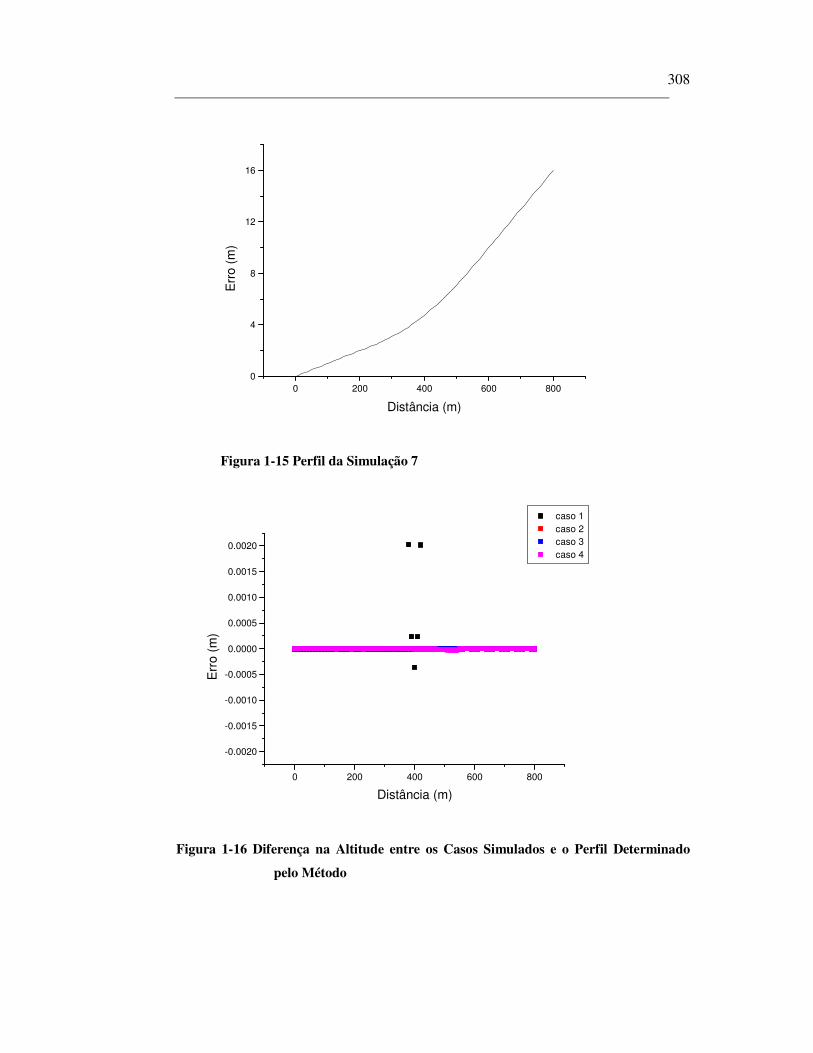
308
0 200 400 600 8000
4
8
12
16
Err
o (m
)
Distância (m)
Figura 1-15 Perfil da Simulação 7
0 200 400 600 800
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
0.0020
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-16 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
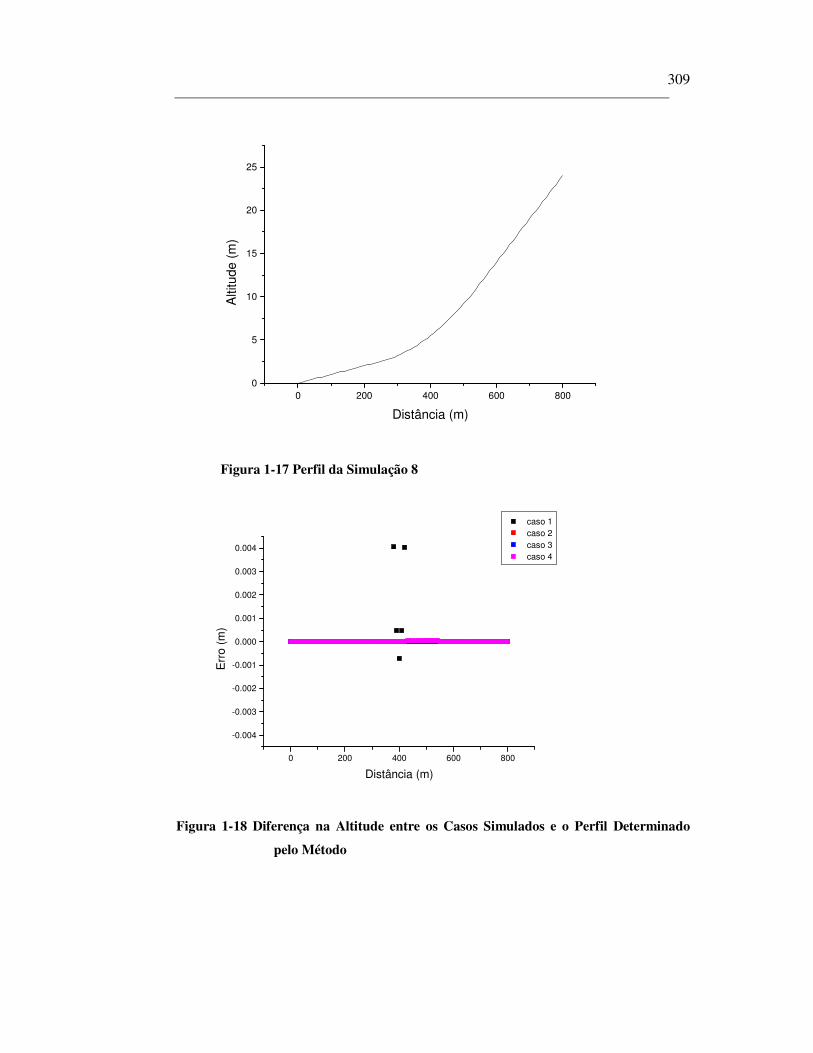
309
0 200 400 600 8000
5
10
15
20
25
Alti
tude
(m
)
Distância (m)
Figura 1-17 Perfil da Simulação 8
0 200 400 600 800
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-18 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
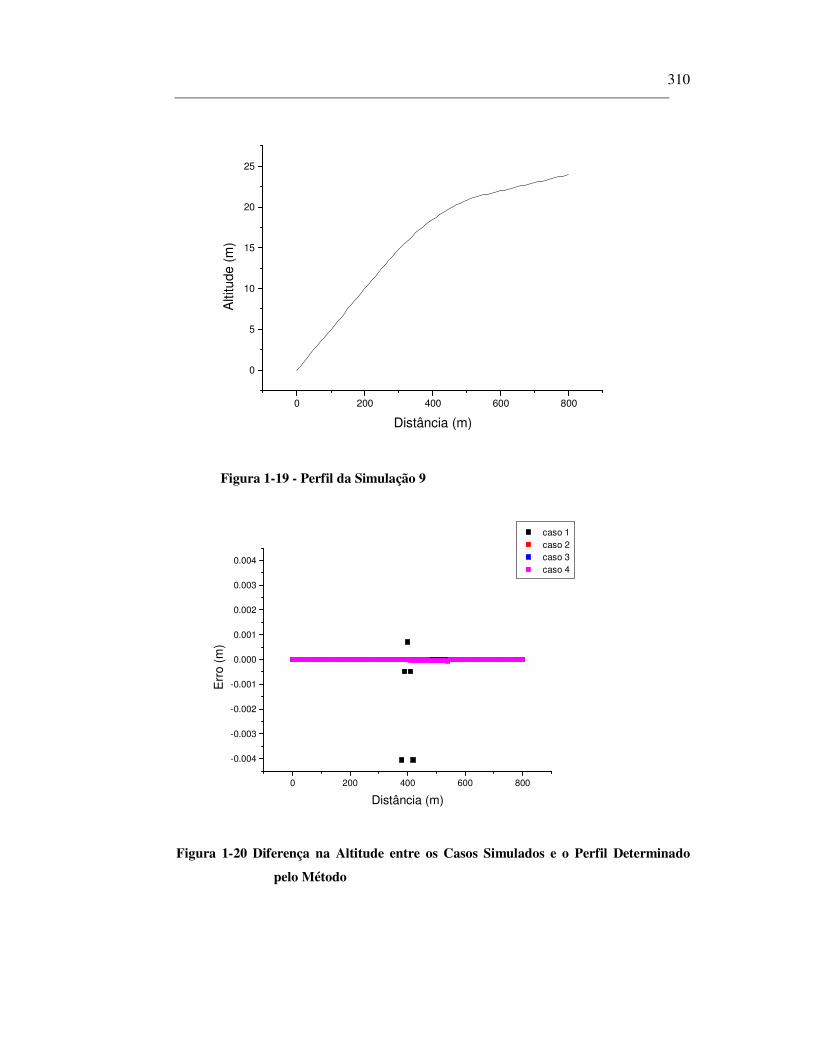
310
0 200 400 600 800
0
5
10
15
20
25
Alti
tude
(m
)
Distância (m)
Figura 1-19 - Perfil da Simulação 9
0 200 400 600 800
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-20 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
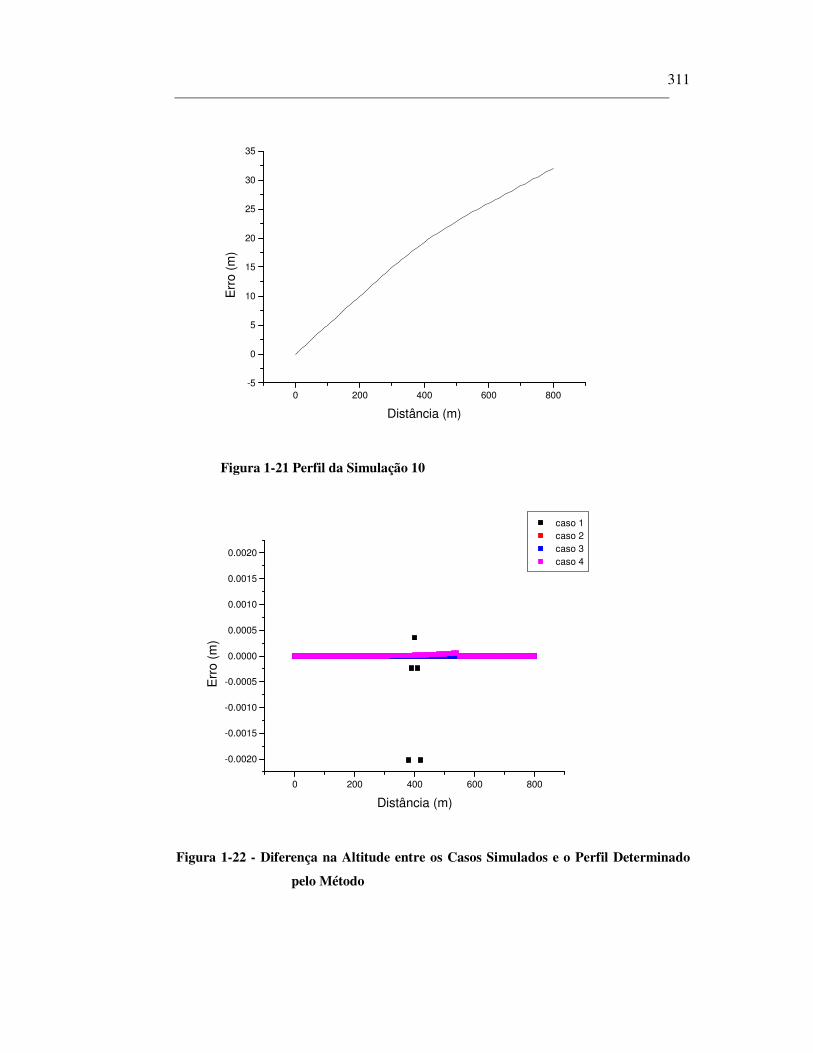
311
0 200 400 600 800-5
0
5
10
15
20
25
30
35
Err
o (m
)
Distância (m)
Figura 1-21 Perfil da Simulação 10
0 200 400 600 800
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
0.0020
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-22 - Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
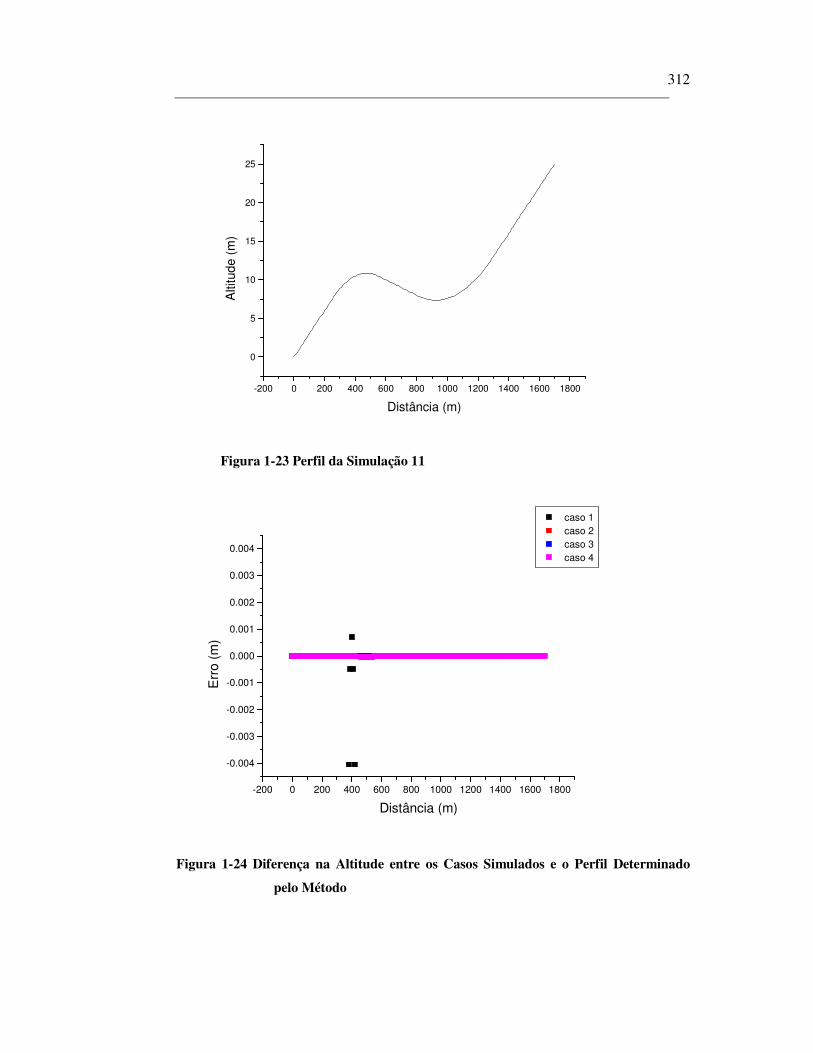
312
-200 0 200 400 600 800 1000 1200 1400 1600 1800
0
5
10
15
20
25
Alti
tude
(m
)
Distância (m)
Figura 1-23 Perfil da Simulação 11
-200 0 200 400 600 800 1000 1200 1400 1600 1800
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-24 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
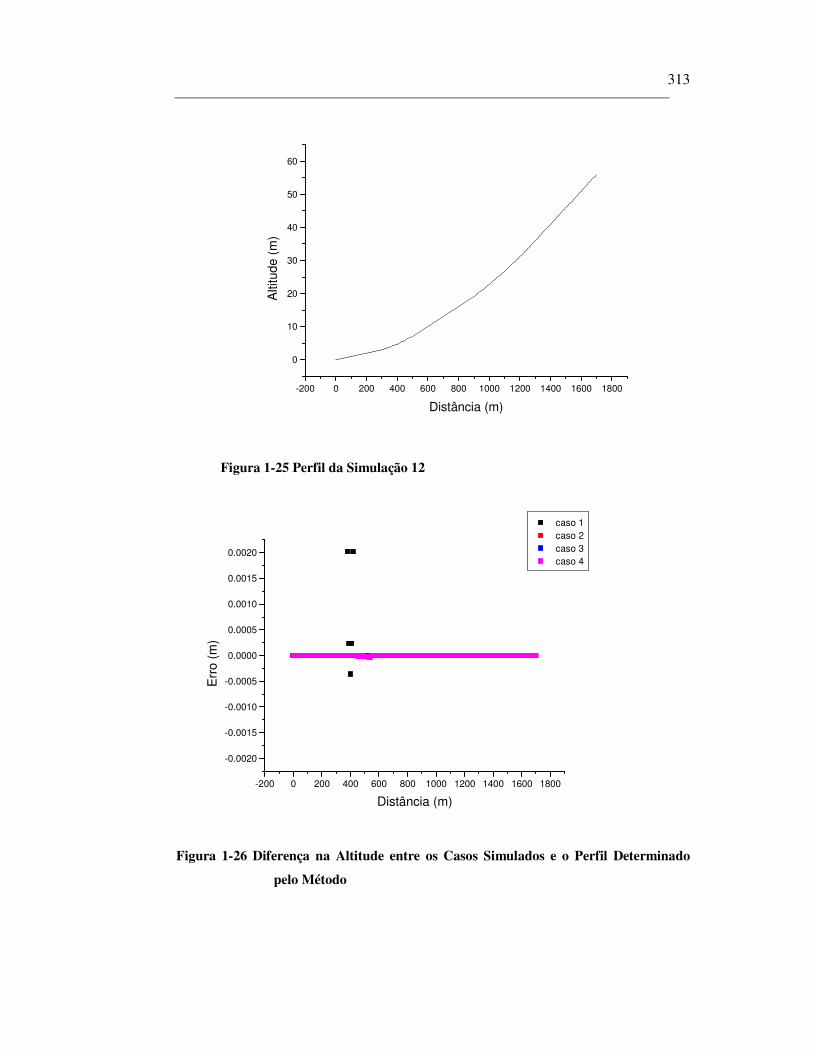
313
-200 0 200 400 600 800 1000 1200 1400 1600 1800
0
10
20
30
40
50
60
Alti
tude
(m
)
Distância (m)
Figura 1-25 Perfil da Simulação 12
-200 0 200 400 600 800 1000 1200 1400 1600 1800
-0.0020
-0.0015
-0.0010
-0.0005
0.0000
0.0005
0.0010
0.0015
0.0020
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-26 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
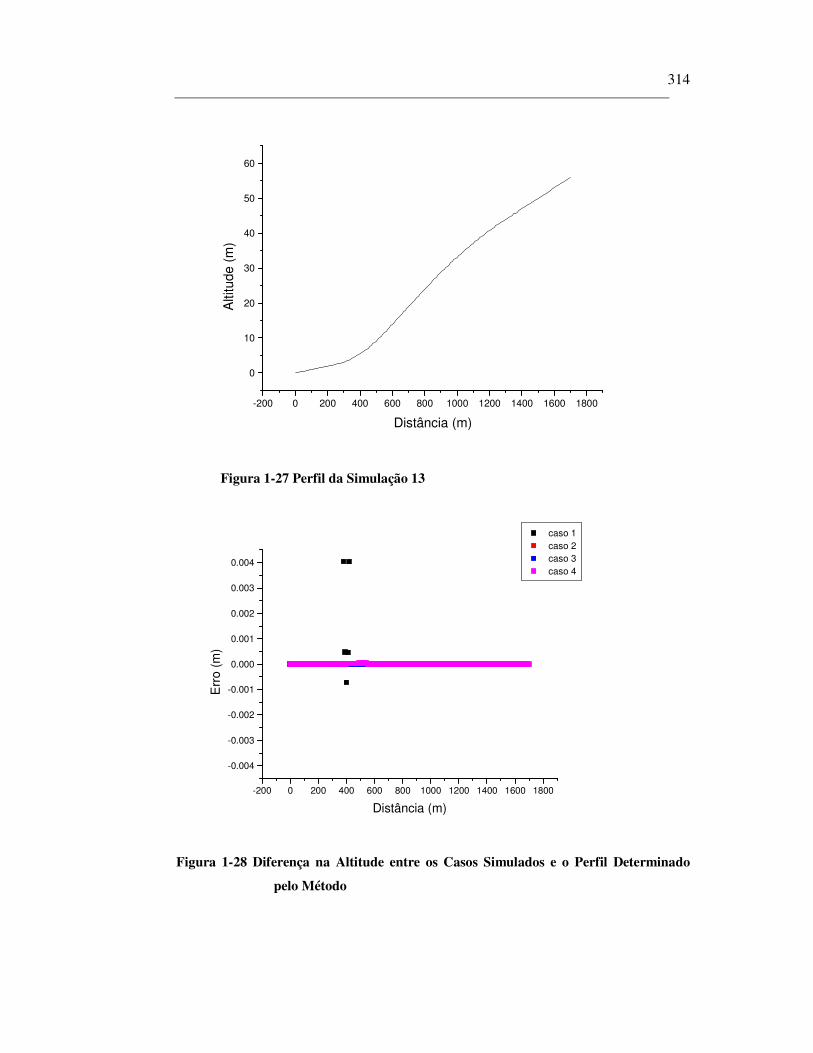
314
-200 0 200 400 600 800 1000 1200 1400 1600 1800
0
10
20
30
40
50
60
Alti
tude
(m
)
Distância (m)
Figura 1-27 Perfil da Simulação 13
-200 0 200 400 600 800 1000 1200 1400 1600 1800
-0.004
-0.003
-0.002
-0.001
0.000
0.001
0.002
0.003
0.004
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-28 Diferença na Altitude entre os Casos Simulados e o Perfil Determinado
pelo Método
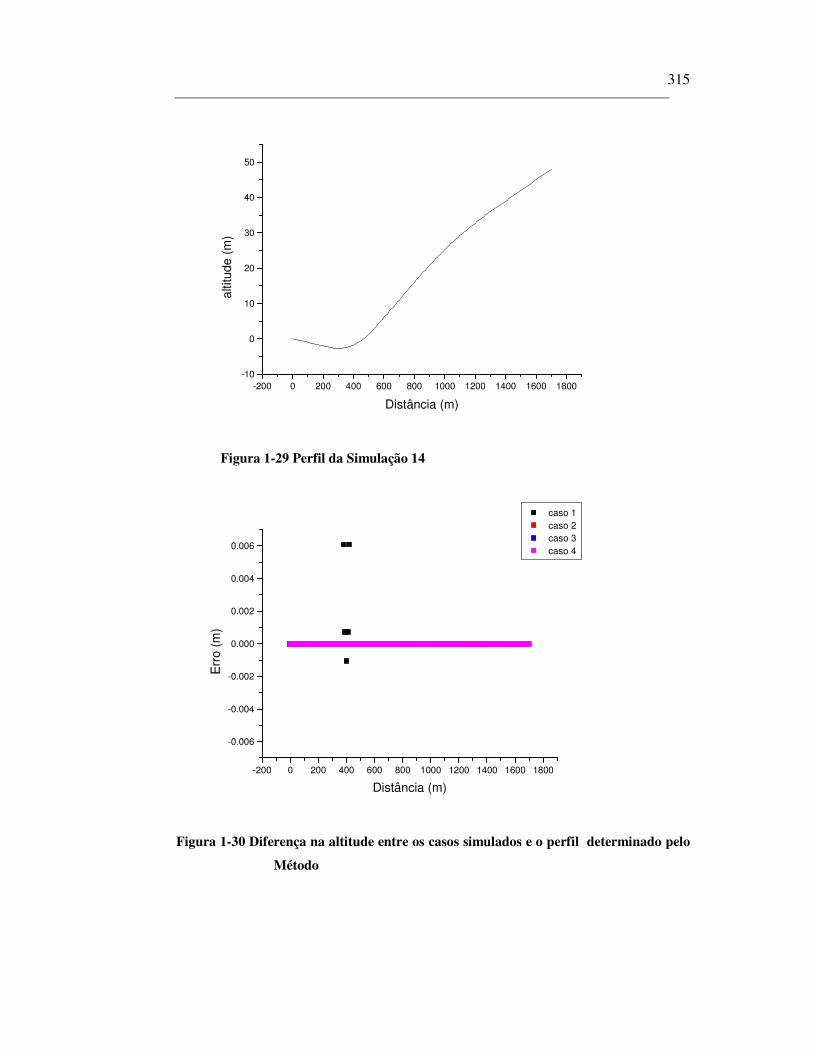
315
-200 0 200 400 600 800 1000 1200 1400 1600 1800-10
0
10
20
30
40
50
altit
ude
(m)
Distância (m)
Figura 1-29 Perfil da Simulação 14
-200 0 200 400 600 800 1000 1200 1400 1600 1800
-0.006
-0.004
-0.002
0.000
0.002
0.004
0.006
caso 1 caso 2 caso 3 caso 4
Err
o (m
)
Distância (m)
Figura 1-30 Diferença na altitude entre os casos simulados e o perfil determinado pelo
Método
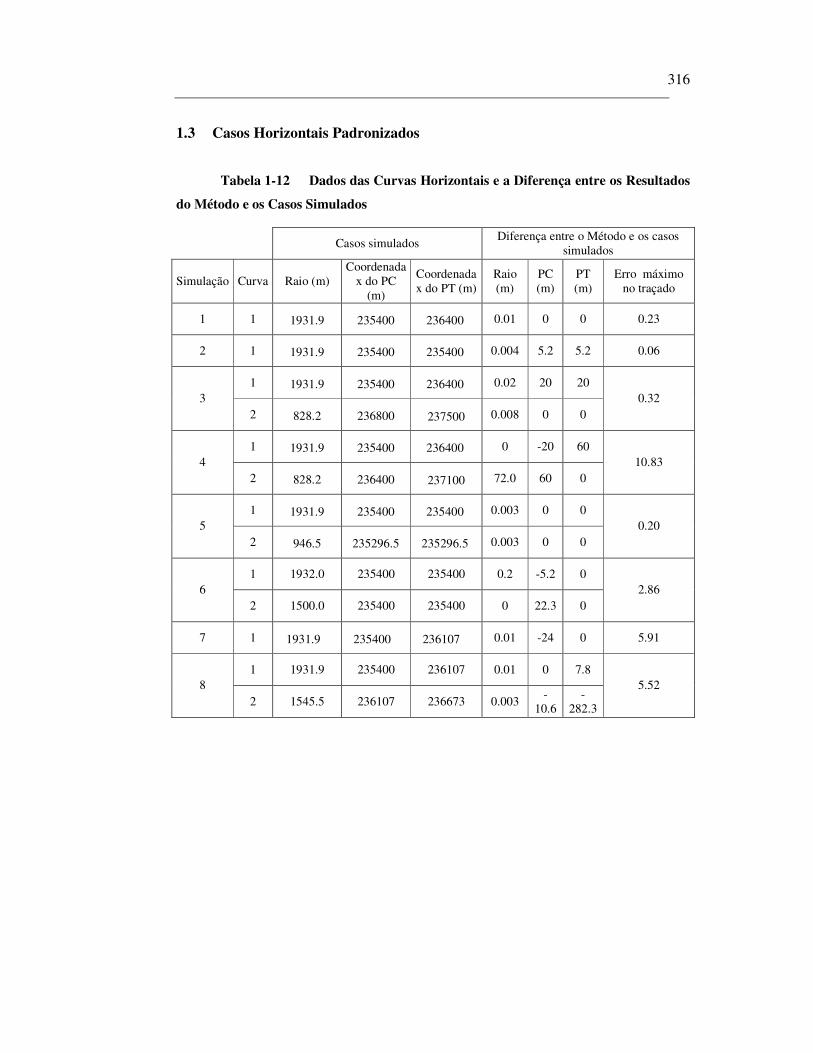
316
1.3 Casos Horizontais Padronizados
Tabela 1-12 Dados das Curvas Horizontais e a Diferença entre os Resultados
do Método e os Casos Simulados
Casos simulados Diferença entre o Método e os casos
simulados
Simulação Curva Raio (m) Coordenada
x do PC (m)
Coordenada x do PT (m)
Raio (m)
PC (m)
PT (m)
Erro máximo no traçado
1 1 1931.9 235400 236400 0.01 0 0 0.23
2 1 1931.9 235400 235400 0.004 5.2 5.2 0.06
1 1931.9 235400 236400 0.02 20 20 3
2 828.2 236800 237500 0.008 0 0 0.32
1 1931.9 235400 236400 0 -20 60 4
2 828.2 236400 237100 72.0 60 0 10.83
1 1931.9 235400 235400 0.003 0 0 5
2 946.5 235296.5 235296.5 0.003 0 0 0.20
1 1932.0 235400 235400 0.2 -5.2 0 6
2 1500.0 235400 235400 0 22.3 0 2.86
7 1 1931.9 235400 236107 0.01 -24 0 5.91
1 1931.9 235400 236107 0.01 0 7.8 8
2 1545.5 236107 236673 0.003 -
10.6 -
282.3
5.52
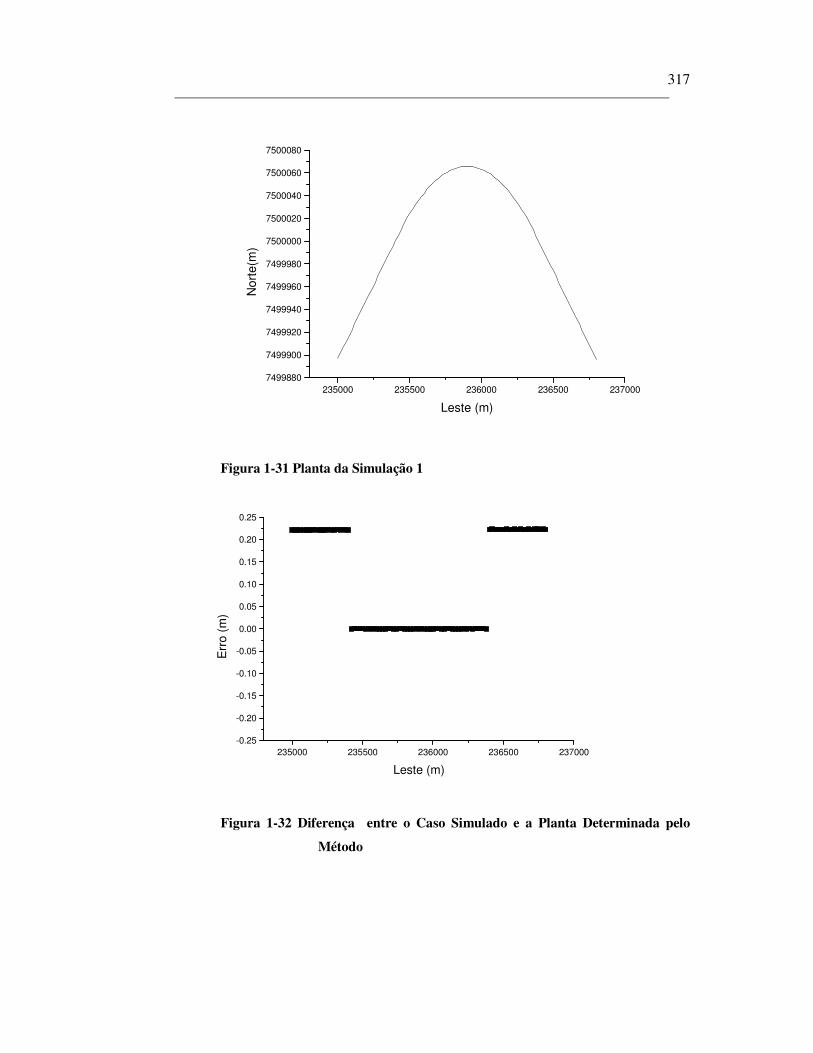
317
235000 235500 236000 236500 2370007499880
7499900
7499920
7499940
7499960
7499980
7500000
7500020
7500040
7500060
7500080
Nor
te(m
)
Leste (m)
Figura 1-31 Planta da Simulação 1
235000 235500 236000 236500 237000-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
Err
o (m
)
Leste (m)
Figura 1-32 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
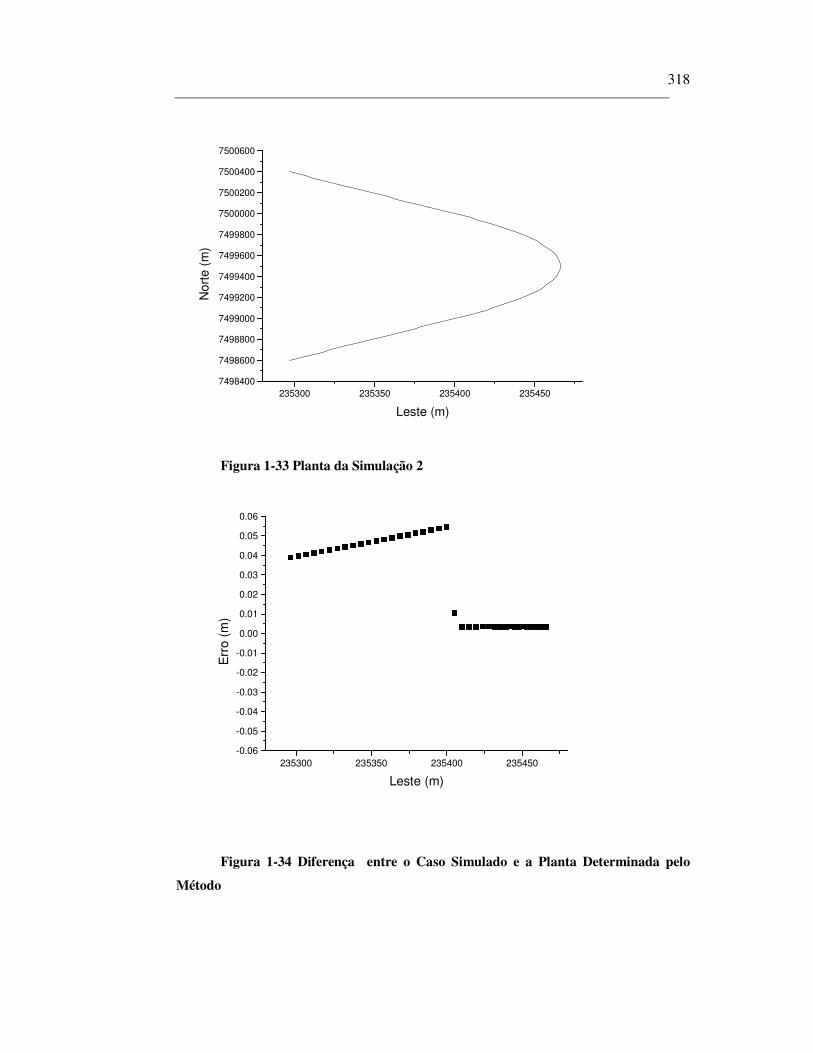
318
235300 235350 235400 2354507498400
7498600
7498800
7499000
7499200
7499400
7499600
7499800
7500000
7500200
7500400
7500600
Nor
te (
m)
Leste (m)
Figura 1-33 Planta da Simulação 2
235300 235350 235400 235450-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
0.06
Err
o (m
)
Leste (m)
Figura 1-34 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
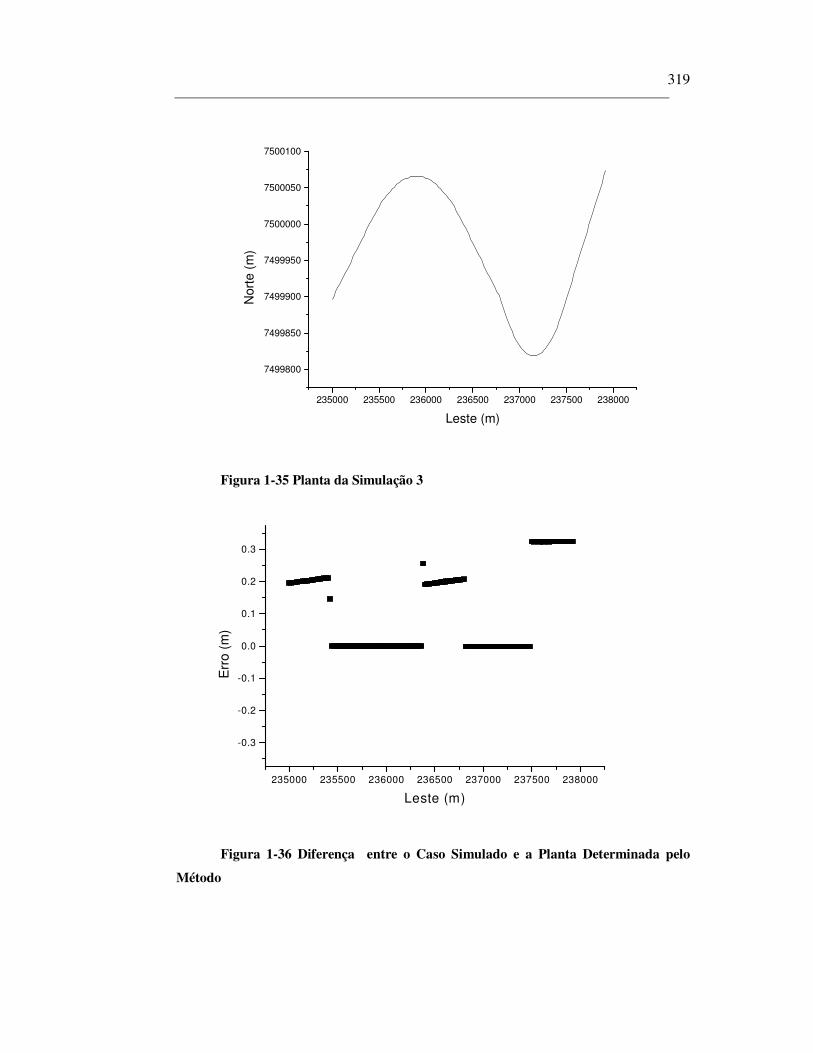
319
235000 235500 236000 236500 237000 237500 238000
7499800
7499850
7499900
7499950
7500000
7500050
7500100
Nor
te (
m)
Leste (m)
Figura 1-35 Planta da Simulação 3
235000 235500 236000 236500 237000 237500 238000
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
Err
o (m
)
Leste (m)
Figura 1-36 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
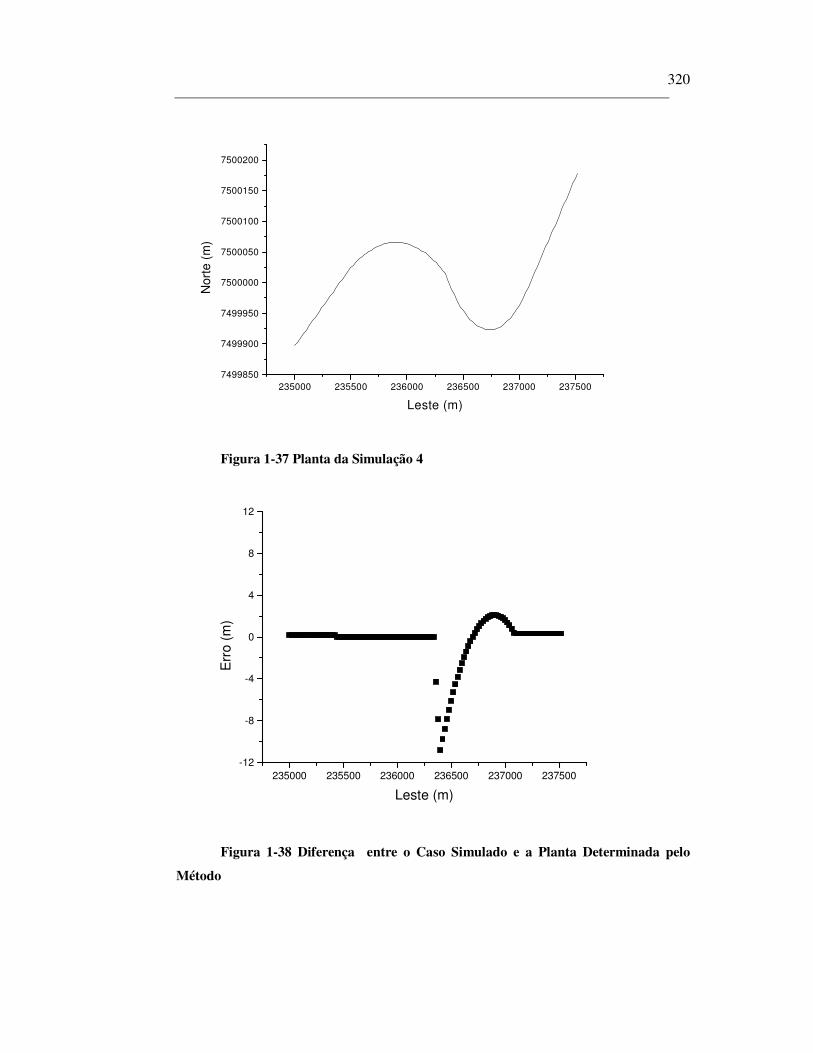
320
235000 235500 236000 236500 237000 2375007499850
7499900
7499950
7500000
7500050
7500100
7500150
7500200
Nor
te (
m)
Leste (m)
Figura 1-37 Planta da Simulação 4
235000 235500 236000 236500 237000 237500-12
-8
-4
0
4
8
12
Err
o (m
)
Leste (m)
Figura 1-38 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
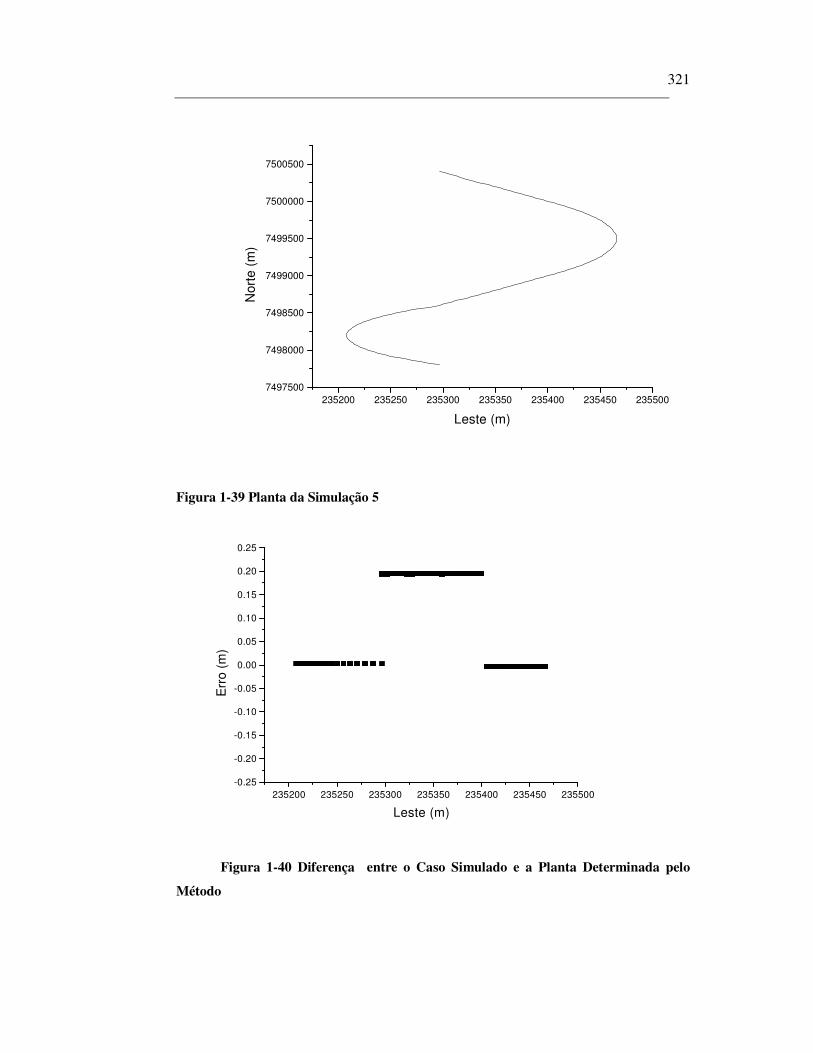
321
235200 235250 235300 235350 235400 235450 2355007497500
7498000
7498500
7499000
7499500
7500000
7500500
Nor
te (
m)
Leste (m)
Figura 1-39 Planta da Simulação 5
235200 235250 235300 235350 235400 235450 235500-0.25
-0.20
-0.15
-0.10
-0.05
0.00
0.05
0.10
0.15
0.20
0.25
Err
o (m
)
Leste (m)
Figura 1-40 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
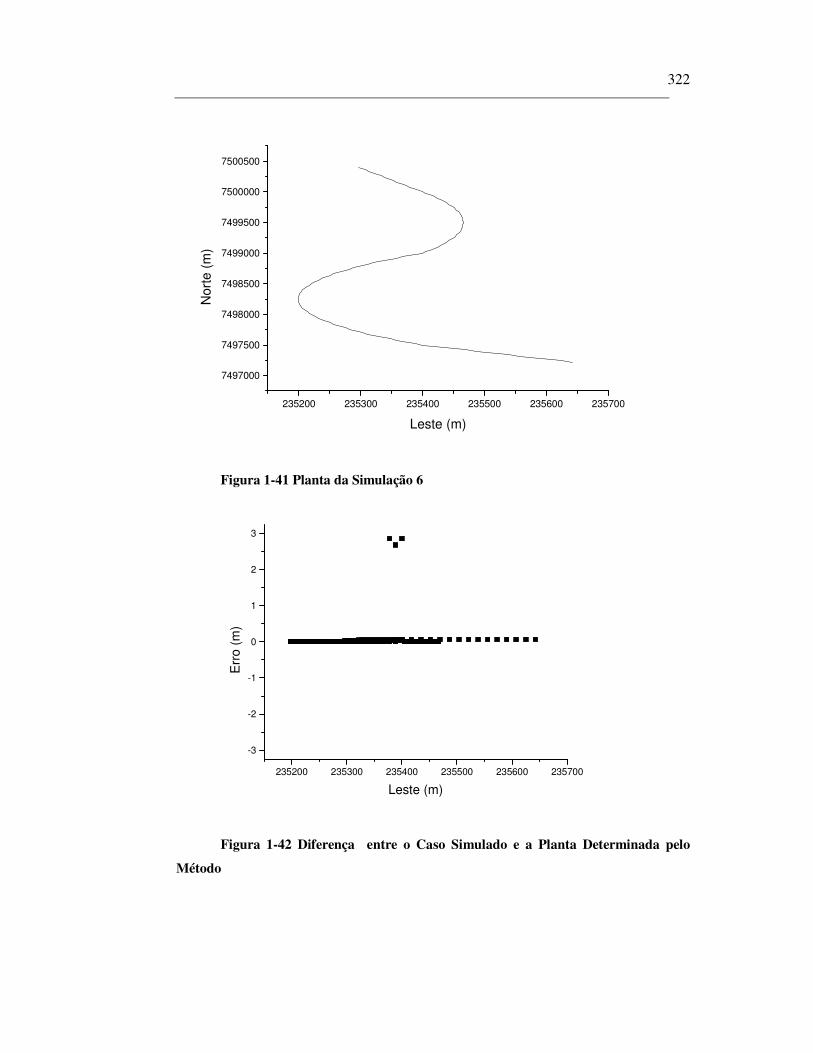
322
235200 235300 235400 235500 235600 235700
7497000
7497500
7498000
7498500
7499000
7499500
7500000
7500500
Nor
te (
m)
Leste (m)
Figura 1-41 Planta da Simulação 6
235200 235300 235400 235500 235600 235700
-3
-2
-1
0
1
2
3
Err
o (m
)
Leste (m)
Figura 1-42 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
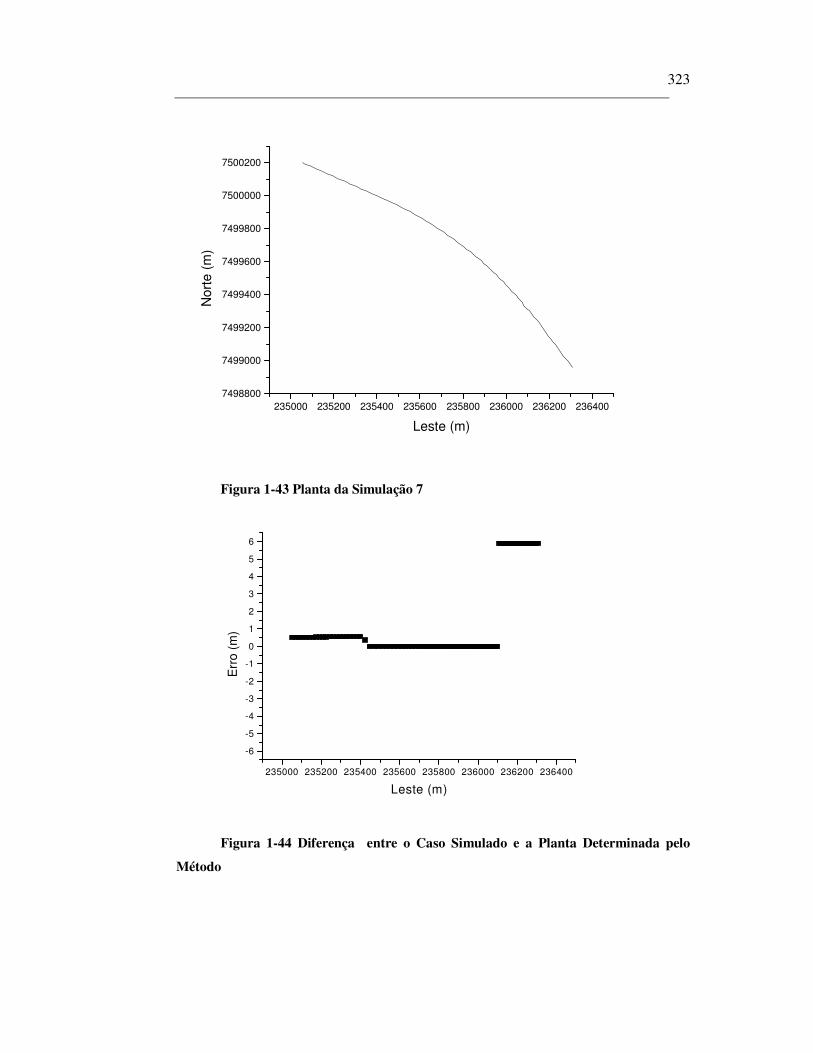
323
235000 235200 235400 235600 235800 236000 236200 2364007498800
7499000
7499200
7499400
7499600
7499800
7500000
7500200
Nor
te (
m)
Leste (m)
Figura 1-43 Planta da Simulação 7
235000 235200 235400 235600 235800 236000 236200 236400
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
Err
o (m
)
Leste (m)
Figura 1-44 Diferença entre o Caso Simulado e a Planta Determinada pelo
Método
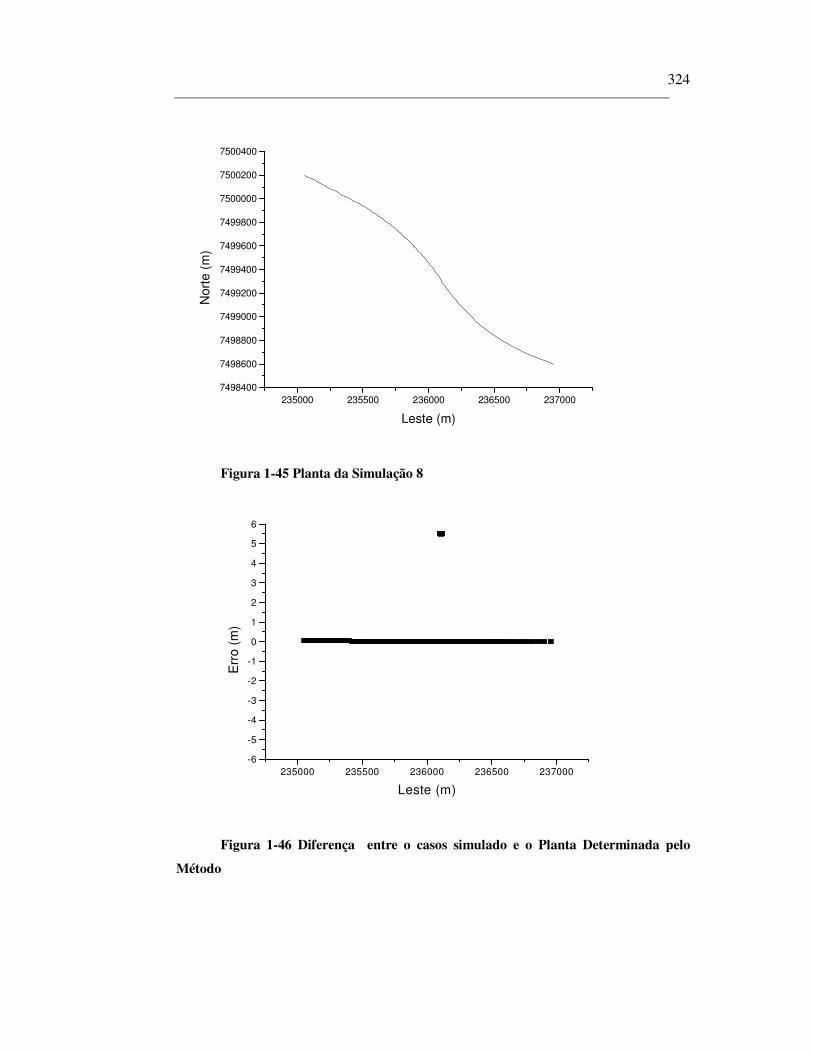
324
235000 235500 236000 236500 2370007498400
7498600
7498800
7499000
7499200
7499400
7499600
7499800
7500000
7500200
7500400
Nor
te (
m)
Leste (m)
Figura 1-45 Planta da Simulação 8
235000 235500 236000 236500 237000-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
Err
o (m
)
Leste (m)
Figura 1-46 Diferença entre o casos simulado e o Planta Determinada pelo
Método