-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
1/142
BASICS OF ACCELERATIONBASICS OF
ACCELERATIONMEASUREMENTS!MEASUREMENTS!
MECHANICAL FAILURE PREVENTION TECHNOLOGYMECHANICAL FAILURE
PREVENTION TECHNOLOGY5959 thth MFPT FORUMMFPT FORUM
April 19, 2005April 19, 2005
John E. JuddJohn E. JuddDynamic Measurement Consultants, LLC
Hamden, CTDynamic Measurement Consultants, LLC Hamden, CT
[email protected]@aol.com
GETTING RELIABLE AND USEFULGETTING RELIABLE AND USEFUL
INFORMATIONINFORMATION
FROM YOURFROM YOURACCELEROMETER.ACCELEROMETER.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
2/142
It is easy to get an
accelerometer tomeasure acceleration.
The problem is to keep itfrom measuringeverything else! .
Walter Kistler
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
3/142
Today we will Talk About:Today we will Talk About:
Some basics of your vibration measurement.Some basics of your
vibration measurement. What common industrial accelerometers
are.What common industrial accelerometers are.
Their operating characteristics.Their operating
characteristics.
Some of the potential problems & error sources.Some of the
potential problems & error sources.
MORE IMPORTANTLY!MORE IMPORTANTLY!
Some of the information they can provide to yourSome of the
information they can provide to yourPdM operation.PdM
operation.
You may be surprised!You may be surprised!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
4/142
Why do you measure vibration?Why do you measure vibration?
To establish machine condition.To establish machine
condition.
To extend the useful life of rotatingTo extend the useful life
of rotatingmachinery.machinery.
To identify conditions that may lead toTo identify conditions
that may lead toshortened life or catastrophic failure.shortened
life or catastrophic failure.
Verify condition correction.Verify condition correction.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
5/142
SOME IMPORTANT THINGS TOSOME IMPORTANT THINGS TOKNOW ABOUT
VIBRATIONKNOW ABOUT VIBRATION
MEASUREMENTMEASUREMENT!!
DISPLACEMENTDISPLACEMENT--VELOCITYVELOCITY--
ACCELERATION? WHAT IS THEACCELERATION? WHAT IS THE
DIFFERENCE AND WHY SHOULD YOUDIFFERENCE AND WHY SHOULD
YOUCARE?CARE?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
6/142
VIBRATIONVIBRATIONS FOURS FOUR
RELATED CHARACTERISTICSRELATED CHARACTERISTICS
DISPLACEMENTDISPLACEMENT--DISTANCEDISTANCE-- D or XD or X--mil
inchesmil inches VELOCITYVELOCITY--SPEEDSPEED-- D/sec =V
(in/secD/sec =V (in/sec--cm/sec)cm/sec)
ACCELERATIONACCELERATION--(( V/sec)= in/secV/sec)= in/sec22
In g units = multiple of gravitational acceleration =In g units
= multiple of gravitational acceleration =in/secin/sec22
/(386.1in/sec/(386.1in/sec2)2) = g= g
FREQUENCY (Hz or rpm)FREQUENCY (Hz or rpm)
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
7/142
Examples of Vibration.
Period = T= Time for one cycle or revolution.
Frequency = 1/ T(seconds) = Cycles / sec = Hertz( Hz)
time
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
8/142
PEAK =X/2
RMS = 0.707 X/2AVERAGE = 0.637X/2
PEAK TO PEAK =X
Periodic Sinusoidal Vibration
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
9/142
LetLets begin by looking ats begin by looking at
Frequency!Frequency!CONVERT rpm to HzCONVERT rpm to Hz
where: Hz =cps = cycles perwhere: Hz =cps = cycles per
secondsecondrpm = revolutions per minuterpm = revolutions per
minute
rpm/60 = Hzrpm/60 = Hz
rpm = Hz*60rpm = Hz*60
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
10/142
DISPLACEMENT = XDISPLACEMENT = X
UNITSUNITS --Inch, milInch, mil--Inch, cm, mmInch, cm, mm
Usually expressed as Peak to PeakUsually expressed as Peak to
Peak( mil inches = inches/1000=0.001( mil inches =
inches/1000=0.001 in.(pin.(p--pp))
CONVERT one inch (CONVERT one inch (pp--pp) into mils) into
mils
ANSWER = 1000 milsANSWER = 1000 mils
CONVERT .005 inch (CONVERT .005 inch (pp--pp) = to mils) = to
mils ANSWER five mils!ANSWER five mils!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
11/142
Convert Displacement to VelocityConvert Displacement to
Velocity
V =V = f Xf X
Velocity in/secVelocity in/sec 3.143.14
freq.(Hzfreq.(Hz)*)*DispDisp--In(ppIn(pp))
ororVelocity in/secVelocity in/sec
.052*RPM*.052*RPM*DispDisp**In(ppIn(pp))
RPM = 3600 ,RPM = 3600 , DispDisp. = 1 mil = Velocity?. = 1 mil
= Velocity?AnswerAnswer 0.187 in/sec0.187 in/sec
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
12/142
Convert Displacement to VelocityConvert Displacement to
Velocity
V =V = f Xf X
Velocity in/sec = 3.14 frequency,Velocity in/sec = 3.14
frequency, DispDisp (In, p(In, p--p)p)
ororVelocity in/sec = .052*RPM*Velocity in/sec =
.052*RPM*DispDisp. (in, p. (in, p--p)p)
RPM = 3600 ,RPM = 3600 , DispDisp. = 5 mils. = 5 milsAnswer =
.94 in/secAnswer = .94 in/sec
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
13/142
Convert Displacement to g unitsConvert Displacement to g unitsg
= .051 fg = .051 f22 XX
g = .051 fg = .051 f22
** DispDisp. (in. (in--pp)pp)or = .051(Rpm/60)or = .051(Rpm/60)
22 ** Disp.(inDisp.(in--pp)pp)
Let : Frequency = 61.45 HzLet : Frequency = 61.45
Hz&&
DisplacementDisplacement 5.18 mils5.18 milsAnswerAnswer approx 1
gapprox 1 g
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
14/142
Convert Velocity into g unitsConvert Velocity into g units
gg =(2=(2f)f)22 X/(2*386.1)X/(2*386.1) (6.28 f/386.1) *
Velocity(6.28 f/386.1) * Velocity
0.0163*f*Velocity0.0163*f*VelocityIf f = 61.45 HzIf f = 61.45
Hz
& Velocity = 1.0 in/sec& Velocity = 1.0 in/sec
We get gWe get g 1.01.0INTERESTING!INTERESTING!AT 61.45 HzAT
61.45 Hz
Useful Rule: 1gUseful Rule: 1g 1in/sec.1in/sec. 5.18 mils5.18
mils
Easy to estimate-@ 1800 1in/sec@ 1800 1in/sec 10mils, 0.5g,
-
7200 1IPS 2.5 mils, 2g, etc Easy to estimate g orDisp.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
15/142
Frequency Relationship-
Displacement-Velocity-Acceleration
Disp-mils(p-p)
Vel-in/sec
Accel g unitsX = Disp(p-p)
Velocity = 3.14 f X (p-p)
g = .051(f)2 X (p-p) AAmpl.
mpl.
Freq.
gVel
Displacement
= 3.14
61.45 Hz
5.18 milsf f2
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
16/142
Displacement = X
Velocity = fX
Acceleration(g) = .051 f2 X
Acceleration
Disp
Velocity
Frequency
Amplitude
Note: at 61.45 Hz 1g =
1 in/sec = 5.18 mils (p-p)
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
17/142
Why is This Relationship
Important?
Take a look at the next few slides withTake a look at the next
few slides withtime history waveforms and spectrum plotstime
history waveforms and spectrum plotsshown inshown in DispDisp.
Velocity and Acceleration.. Velocity and Acceleration.
Both bearing #9 and #5 are damaged.Both bearing #9 and #5 are
damaged.
Displacement and Velocity suppress highDisplacement and Velocity
suppress high
frequency energy containing valuable datafrequency energy
containing valuable dataon bearing surface condition.on bearing
surface condition.
BRG 9 IN2 0 380418f
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
18/142
BRG 9, IN2, rms=0.380418Velocity time waveform.
0 20.0m 40.0m 60.0m 80.0m 100.0m 120.0m 140.0m 160.0m-1.0
-500.0m
0
500.0m
1.0
se
Re
RMS: 0.3
Live X1X: 0.0799609Y: 0.472679
IN/SEC
BD=3.6, HF=7.3, CF=6, KF=0.13, ED=3
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
19/142
Acceleration Time Waveform. BRG 9, IN2, rms=1.08119
0 20.0m 40.0m 60.0m 80.0m 100.0m 120.0m 140.0m 160.0m-10.0
-5.0
0
5.0
10.0
se
Re
RMS: 1.0
Live X1X: 0.0799609Y: -0.20284
Gs
BD=3.6, HF=7.3, CF=6, KF=0.13, ED=3
Velocity Time Waveform BRG 5 OUT 0 295444
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
20/142
Velocity Time Waveform BRG 5, OUT, rms=0.295444
0 20.0m 40.0m 60.0m 80.0m 100.0m 120.0m 140.0m 160.0m-1.0
-500.0m
0
500.0m
1.0
se
Re
RMS: 0.295444
Live X1X: 0.0799805Y: -0.16657
IN/SEC
BD=11, HF=12.7, CF=14, KF=10, ED=12.1
Acceleration Time Waveform BRG 5 OUT rms=2 22567
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
21/142
Acceleration Time Waveform BRG 5, OUT, rms=2.22567
0 20.0m 40.0m 60.0m 80.0m 100.0m 120.0m 140.0m 160.0m-10.0
-5.0
0
5.0
10.0
se
Re
RMS: 2.2
Live X1X: 0.0799805Y: 0.209865
Gs
BD=11, HF=12.7, CF=14, KF=10, ED=12.1
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
22/142
0 5.0K 10.0K 15.0K 20.0K0
500.0u
1.0m
1.5m
2.0m
2.5m
3.0m
Hz
Ma
S1X: 6600Y: 1.57844e-005
Bearing #5 - Outer Race Heavy Score
MILs
SKF 6205
52Hz
20 kHz Displacement Spectra
Low Frequency amplified
Hign Frequency suppressed!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
23/142
0 5.0K 10.0K 15.0K0
10.0m
20.0m
30.0m
40.0m
Hz
Ma
S1X: 6Y: 0.
Bearing #5 - Outer Race Heavy ScoreIN/SEC
SKF 6205
6kHz
20 kHz Velocity Spectrum
Emphasis on LowFrequency
High Frequency
Reduced
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
24/142
0 5.0K 10.0K 15.0K 20.0K0
100.0m
200.0m
300.0m
400.0m
500.0m
Hz
Ma
S1X: 6600Y: 0.0703045
Bearing #5 - Outer Race Heavy Score
Gs
SKF 620552Hz
20 kHz Acceleration
Spectrum Here is the bearingcondition information!
Th NATURE OFTh NATURE OF
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
25/142
The NATURE OFThe NATURE OF
ACCELEROMETERSACCELEROMETERS
THE OPERATIONAL BASICS .
IMPORTANT CHARACTERISTICS.
POSSIBLE PROBLEMS ?
HOW TO SPOT & AVOID THEM.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
26/142
AVD CONCLUSION?
For low frequency information, Balance,For low frequency
information, Balance,
Alignment, Foundation, or low end bearingAlignment, Foundation,
or low end bearingfault frequencies use Velocity. (in/sec)fault
frequencies use Velocity. (in/sec)
For sensing early degradation in rollingFor sensing early
degradation in rollingelement bearings use acceleration. (g)element
bearings use acceleration. (g)
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
27/142
PROVIDES AN ELECTRICAL OUTPUT
PROPORTIONAL TO THE
INSTANTANEOUS VALUE OF THEVIBRATORY MOTION.
A VIBRATION TRANSDUCER
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
28/142
THE ACCELEROMETER
(Hz)
Produces voltage proportional to
Instantaneous acceleration.Acceleration = Rate of change of
Velocity =
(In g units = 0.051 f2 X
Where: f = frequency (Hz)
X = displacement (PP)
Usual output voltage units = mv/g
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
29/142
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
30/142
Voltage = Force = Mass * Acceleration= K Acceleration
SIMPLE ACCELEROMETER
VOLTAGE FOLLOWS BASE MOTION
MOTION VOLTAGE
POSITIVE NEGATIVEVOLTAGE
Down
Reaction
Force
Motion
Upward
Reaction
Force
Motion
Voltage = charge/xtal capacitance
MASS
BASE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
31/142
REACTION
FORCESHEAR STRESS
SENSOR BASE
XSTAL
Positive ChargeNegative Charge
--
-
++
MOTION
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
32/142
CRYSTALS
COLLECTORS
MASSMOUNTING BASE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
33/142
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
34/142
Early Style Voltage Amplifier!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
35/142
Ca
Ca + Cexte o
e
Note: Sensitivity changes with cable length!
Early Style Voltage Amplifier!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
36/142
Simplified Charge Mode Amplifier!
Sensitive to triboelectric cable noise! Requires
special low noise cable!
Low Impedance Circuit!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
37/142
Low Impedance Circuit!
No Tribo noise, long cables, low coupled noise.
24v
Constant Current Signal Extraction Mode usedin most modern
industrial accelerometers!
IMPORTANT ACCELEROMETERIMPORTANT ACCELEROMETER
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
38/142
IMPORTANT ACCELEROMETERIMPORTANT ACCELEROMETER
CHARACTERISTICSCHARACTERISTICS SENSITIVITYSENSITIVITY
NOISE DISTRIBUTIONNOISE DISTRIBUTION LOW FREQUENCY RESPONSELOW
FREQUENCY RESPONSE
HIGH FREQUENCY RESPONSEHIGH FREQUENCY RESPONSE
FILTERED OR UNFILTEREDFILTERED OR UNFILTERED
BASE STRAINBASE STRAIN
TRANSVERSE SENSITIVITYTRANSVERSE SENSITIVITY
TEMPERATURETEMPERATURE
SENSITIVITYSENSITIVITY
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
39/142
SENSITIVITYSENSITIVITY
RESPONSERESPONSE
1-3mv/g
Base motion
The transducer conversionconstant along its majoraxis in Volts,
or
mUsfrequency, temperatureand level ( 1 g )
Example: 100 mv/g100Hz
illivolts/g.ually at specified
@, 1g, 720 F
100 mv/g
R t t
The transducer sensitivityAlong the axis perpendicular
Transverse Sensitivity
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
40/142
Maximum
Expressed as %
of basicsensitivity.
5%
View from top of accelerometer
Rotate
Motion Motion
Machine
motion
LATERAL MOTION CANOFTEN BE AS HIGH ASVERTICAL MOTION!
MINIMUM
EFFECT ON ACCURACY OF VERTICLE AXIS READING IS NEGLIGIBLE!
Along the axis perpendicularto the Sensitive axis.
Expressed as a % ofthe Basic Sensitivity.For example:3% of basic
sensitivity
Triax?
Sample Change in Sensitivity
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
41/142
p g y
w /Temperature
charge
voltage
5 %
Usual limit 65 0 F to 250 0F. Special units
to 400 0 F w/Electronics.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
42/142
ANSI Standard 82.11- thermal shock
gModel X
Model Y
10 SecondsAmbient to320F
Thermal shock!
Change in Sensitivity dueto temperature transient!
0.14g/C0
0.004/C0
Li it Ch i S iti it
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
43/142
Linearity-Change in Sensitivity
with level
Deviation
Level g
BasicSensitivity
@ 100 Hz1 g
BASE STRAIN ERROR
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
44/142
Input
motion
Induced strain
BASE STRAIN ERROR
strain= 1 inch/inch
= micro inch= 10 -6 inches
strain typical = 0.0003-0.001g/
Error signal introduced whensensor case or base
mountinginterface is mechanically strained
Specification = g/ strain
If large difference at Greased
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
45/142
BASE STRAIN ERROR
USUALLY OCCURS AT 1X IN LARGELOW FREQUENCY MACHINERY
USE MECHANICAL ISOLATION STUD.
1x between magnet
and hard mountedsensor check basestrain.
bushing will
minimize effect.
High Overall
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
46/142
High Overall
High Discrete Signal LevelsHigh Discrete Signal LevelsHighHigh
1X1X signal levels may indicate that there is asignal levels may
indicate that there is a
bending mode in the machine causing base strainbending mode in
the machine causing base strain
in the sensor. The bending mode may bein the sensor. The bending
mode may bedecoupled by a magnet or mountingdecoupled by a magnet
or mounting
bushing placed under the sensor.bushing placed under the
sensor.
Base strain=.001 g/ms X10 ms=.01g
.01g @ 300 CPM= .12 in/sec 7 mils.!
just from strain error!
1X
26
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
47/142
High Overall High Discrete Signal LevelsHigh Discrete Signal
Levels
HighHigh
1X1X
signal levels may indicatesignal levels may indicate
that there is a bending mode in thethat there is a bending mode
in the
machine causing base strain inmachine causing base strain in
thethe sensor. The bendingsensor. The bendingmode may bemode may
be decoupled by adecoupled by a
magnet or mountingmagnet or mounting bushingbushing
placed under the sensor.placed under the sensor.Base strain=.001
g/ms X10 ms=.01g
.01g @ 300 CPM= .12 in/sec
1X
26
MOUNTED RESONANTMOUNTED RESONANT
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
48/142
FREQUENCYFREQUENCY
The axial resonance of the mountedThe axial resonance of the
mountedaccelerometeraccelerometers sensing crystal and itss sensing
crystal and its
associated mass. The frequency at whichassociated mass. The
frequency at whichthe unfiltered basic sensitivity is maximum.the
unfiltered basic sensitivity is maximum.
Usually expressed in kHz.Usually expressed in kHz.
VIBRATION TRANSMISSIBILITY RATIO
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
49/142
A out
A input
Ratio - A out / A invs. Frequency
Ratio = forcing freq./ natural freq.Fn=1.0
K
Fn = 1/2 K/M
M XSTAL
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
50/142
Frequency
Useful frequency response range
Accelerometer Sensitivity vs. Freq.
Internal
Filter
Useablerange
Typical
Specified
Range
5-10kHz
+/- 5%
Low
But
Useable
Typical
3-5 Hz
Useable for
high frequency
10 15
kHz
fn
Resonancerange 15 to25kHz
+/- 5%+/-3dB
10kHz
Mounting - High Frequency
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
51/142
Effects
41
MountingMounting
AA -- Stud MountingStud MountingBB --Adhesive MountingAdhesive
Mounting
CC -- Magnetic MountingMagnetic Mounting
DD -- Hand HeldHand Held
A
B
C
D
10Hz 100Hz 1kHz 10kHz
Minimum effect at low frequency!
R dif t !
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
52/142
Resonances modify your spectrum!
39
Mount to solid surfaces- near load zone
id b k !
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
53/142
38
avoid brackets!
Bracketresonance
can modifymachine
spectrum!
x
BEST
Better
fn
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
54/142
SURFACE PREPARATION
Thin film
Silicon grease.
42
Mounting holes shall be drilled
and tapped to a depth suffic ient
to accommodate the mounting
stud.
Accelerometer mountingsurfaces shall be flat within
700 micro inches RmsSurface finish of 125 microinches
or better
Drilled and tapped holesshall be perpendicular to
the finished surfaceswithin 1 degree1 degree
A-59
ChamferRemove burrs
Suggestions regarding frequency
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
55/142
response. If you have something specific to measure such as 3If
you have something specific to measure such as 3rdrd
gear mesh and know the expected frequency, selectgear mesh and
know the expected frequency, selectsensor with fn at least 2/3x
expected frequency.sensor with fn at least 2/3x expected
frequency.
For bearing measurements mount sensor close to loadFor bearing
measurements mount sensor close to loadzone. This can usually be
visually estimated.zone. This can usually be visually
estimated.
General vibration energy up to 10/13 kHz. Select unitGeneral
vibration energy up to 10/13 kHz. Select unit
with 25 kHz fn.with 25 kHz fn. If you need to measure important
information above 2/5If you need to measure important information
above 2/5
kHz pay special attention to method of mounting. UsekHz pay
special attention to method of mounting. Useflush (not horseshoe)
super magnets, rigid epoxy bonds.flush (not horseshoe) super
magnets, rigid epoxy bonds.
Do not use hand held stinger probe.Do not use hand held stinger
probe. Above 8kHz hard mount to flush flat surface with thin
filmAbove 8kHz hard mount to flush flat surface with thin film
of silicon grease.of silicon grease.
MOUNTING & PROBESMOUNTING & PROBES
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
56/142
MOUNTING & PROBESMOUNTING & PROBES
MOUNTINGMOUNTING--HARD, ADHESIVESHARD, ADHESIVES
MAGNETSMAGNETS HAND PROBESHAND PROBES
USE OF MAGNETS!TEST ACCEL
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
57/142
INTERFACE #1
INTERFACE #2
HIGH FREQUECY
REFRENCE ACCEL.
WITH FLAT +/-
5% RESPONSETO 10KHz
Sweeping sinusoidalvibration Input motiongenerated from high
frequency vibrationexciter.
SUPER
MAGNET
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
58/142
Thick film of grease.(+20%)
10kHz
+20%
+10% @ 6kHz
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
59/142
SUPER MAGNET W/OILED SURFACE (+10%)
10kHz
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
60/142
Thin film of grease-best (+5%)
The grease tends to fill thevoids and provide betterinterface
coupling!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
61/142
1)HARD MOUNT
2) S-MAGNET/GREASE10 kHz
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
62/142
Super magnet on drysurface @ 5 g.
Conclusion on Magnet?Conclusion on Magnet?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
63/142
Conclusion on Magnet?g
Use rare earth super magnets with machined contactUse rare earth
super magnets with machined contactsurface.surface.
Use smooth machined bushing for attachment.Use smooth machined
bushing for attachment. Thin film of grease or oil gives good
results to 10 kHz.Thin film of grease or oil gives good results to
10 kHz.
More is not better! Do not use excessive Coating ofMore is not
better! Do not use excessive Coating of
grease.grease. Thin film of silicone grease on both mating
surfaces isThin film of silicone grease on both mating surfaces
is
best.best.
Consider the expected g level!Consider the expected g level!
Over 5/10 g use grease on both surfaces, high strengthOver 5/10
g use grease on both surfaces, high strength25 lb magnet or hard
mount if possible.25 lb magnet or hard mount if possible.
Use of a Hand Held Probe?
Be Aware!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
64/142
35
Be Aware!
Good grade 100mv/g accel!
Frequency response
10 kHz
5%
Hand Held Probe- 4 1/2 in stinger
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
65/142
36
Data Amplified
500 Hz 2300 Hz
700Hz
Data attenuated
Up 5 dB
Up 4 dB
Down 8dB
SUGGESTION
Fn est. 0.16(AE/L(ms+0.3mr))
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
66/142
37
10,000 Hz
SUGGESTION:
ONLY USEHANDHELD
PROBES FORCHECKING LOWFREQUENCYBALANCE ANDALIGNMENT ABOVE1200
CPM!
20 dBAttenuation!
NADA!Bearing information
Conclusion on hand probe!Conclusion on hand probe!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
67/142
pp
Be cautious in using hand probes inBe cautious in using hand
probes in
general.general. Tests indicate that they are best usedTests
indicate that they are best used
above 20 Hz and below 500 Hz.above 20 Hz and below 500 Hz.
For checking imbalance and misalignment.For checking imbalance
and misalignment.
Not recommended for use in detectingNot recommended for use in
detecting
bearing faults.bearing faults.
NOISE SOURCES!NOISE SOURCES!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
68/142
GENERALGENERAL
GROUNDING NOISEGROUNDING NOISE BASE COUPLED NOISEBASE COUPLED
NOISE
EFFECTS OF INTEGRATIONEFFECTS OF INTEGRATION LOW FREQUENCY
NOISE!LOW FREQUENCY NOISE!
High OutputHigh Output-- Ground Loop NoiseGround Loop Noisekeep
connectors and sensors off ground!keep connectors and sensors off
ground!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
69/142
keep connectors and sensors off ground!keep connectors and
sensors off ground!
Machine Surface13
Case GroundedCase Grounded
Line PoweredAnalysis
Equipment
Currentflow
through
groundloop
I
noise voltageon ground
Noisecapitivelycouples
into signal!
SENSOR SYSTEM REVISITEDSENSOR SYSTEM REVISITED
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
70/142
Accel.
24 Vdc
12 Vdc
Bias Level
0 Vdc
2ma constant current
>
Data System >
Vibration
Signal>
CAPACITIVELY
COUPLED
NOISE FOILS
INTERNAL
ISOLATION.
GROUND NOISE
CONTAMINATION
SHORTS OUTEXTERNALISOLATION
Internal or external isolationcould be a problem!
8
High OutputHigh Output--Ground Loop NoiseGround Loop Noiseor
Base Coupled Noise!or Base Coupled Noise!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
71/142
14
pp
IsoShieldIsoShield
Thin film
Isolation
Internal
Faraday
Shield
Good solution!
TM Glass Isolated
outputs.
Trademark Vibra-Metrics Inc.
Noise isshunted toground!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
72/142
Another
Isoshield tm
Design.
High level at line frequency
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
73/142
High level at line frequency
Zoom in to check actual frequency.Zoom in to check actual
frequency.
Should be exactly at power line.Should be exactly at power
line.
Try power turn offTry power turn off-- If it disappearsIf it
disappears
instantlyinstantly --itit s electrical!s electrical!
If notIf not --itit s from other source.s from other source.
Check for single System groundCheck for single System ground
..
Remember ground noise can be fromRemember ground noise can be
fromadjacent machine or sourceadjacent machine or source!!
16
High Output - Ground loop noise
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
74/142
g p p
Loss of IsolationLoss of Isolation
60 Hz
Conductive materials
at the accelerometer,
cable, or connections
are conmon cause of
ground loops !
running
speed
17
Most Common Noise Problems:
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
75/142
NoiseNoise --IntegrationIntegration--Low FrequencyLow Frequency
ClippingClipping [[May be high frequencyMay be high
frequency--above analysis range!]above analysis range!]
Bias InstabilityBias Instability--square wave FFT causes
oddsquare wave FFT causes oddharmonics.harmonics.
TurnTurn--on Time, Base Strain, Cable Sensitivityon Time, Base
Strain, Cable Sensitivity
Loss of IsolationLoss of Isolation--60 Hz noise60 Hz noise
Use Time Domain as a diagnostic tool.Use Time Domain as a
diagnostic tool.
See strange peak? Change resolutionSee strange peak? Change
resolution.. High frequencyHigh frequency--VFD, Gear noise, line
coupledVFD, Gear noise, line coupled
noise from other electrical signals.noise from other electrical
signals.55
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
76/142
COMMON SOURCESCOMMON SOURCESOFOF
LOW FREQUENCY NOISE!LOW FREQUENCY NOISE!
High Output - Ski slopeProblem-suppresses real signal!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
77/142
00.2
0.4
0.6
0.8
1
1 10 100 1,000 10,000
M10v
M10
M10
Frequency
Ski-slope
OA= 0.8
1x =0.19
18
Understand INTEGRATION!Understand INTEGRATION!Amplifies low
frequency noise.Amplifies low frequency noise.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
78/142
p q yp q y
23
FFT ofFFT ofAccelerationAcceleration
FFT integrated toFFT integrated to
VelocityVelocity
Frequency
Frequency
A
V
VelocityVelocity g/0.0163*fg/0.0163*f
or 1/for 1/f
High OverallHigh Overall--SKI SLOPESKI SLOPE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
79/142
gg
USE HIGH PASS FILTER IN DATA
COLLECTOR. SKI SLOPEW/O FILTER
Hi Pass Filterset below frequency
of interest.
Noise
W/ Filter
24
This will drop the overall component levels
due to noise or unwanted foundation motion!
High OutputHigh Output-- skiski--slopeslope((Low Frequency
MeasurementsLow Frequency Measurements))
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
80/142
25
Sensor / Power Supply 1/f Noise (InSensor / Power Supply 1/f
Noise (In
Velocity)Velocity)Velocitynoise.
Frequency
Velocity = 61.5 x g
F
Very low frequency SIGNAL.
Note that HP filter will nothelp here! Why?
Velocity
signal
1/F
NOISE
May need higher Sensitivity
High OverallHigh Overall-- SKI SLOPESKI SLOPE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
81/142
g
Sensor TurnSensor Turn--on Timeon Time
22
Final
Bias
24 Volts
TIMET = 0
Looks like Low Frequency
Some sensors can take 8 to10 secs!Allow time before collecting
data.
SKI SLOPE ?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
82/142
Real Motion?Real Motion?
Structural / support motion is usuallyStructural / support
motion is usually
discrete frequency. Increasediscrete frequency. Increase
analysis resolution.analysis resolution.
Look for distinct peaks that relate toLook for distinct peaks
that relate tofloor or structural resonance.floor or structural
resonance.
Otherwise itOtherwise it
s probably noise!s probably noise!
Put sensor on floor or structure!Put sensor on floor or
structure!
20
Other Diagnostic Tricks!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
83/142
21
Changing FFT resolution to checkChanging FFT resolution to
checkfor discrete structural frequencies.for discrete structural
frequencies.
5 kHz
5 kHz
Low resolution
High Resolutionsupport
noise
High Ski Slope
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
84/142
Possible CausesPossible Causes::
1) Could be real motion of floor or1) Could be real motion of
floor or
supporting Structure?supporting Structure?
2) Sensor turn on time?2) Sensor turn on time?
3) Sensor 1/f noise?3) Sensor 1/f noise?4) Integration
processing noise?4) Integration processing noise?
6) Clipping Saturation products?6) Clipping Saturation
products?
7) Aliasing signal processing errors?7) Aliasing signal
processing errors?
8) Wrong high pass filter?8) Wrong high pass filter?
19
Signal Level Dropping!Trouble Level Dropping!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
85/142
Low Frequency Noise Increasing!
Random Noise=Random Noise=g(rmsg(rms) = ( g) = ( g22/ Hz */ Hz
*BwBw))
= g/= g/ Hz (Bw)Hz (Bw)1/21/2Where:Where:
gg
22
/ Hz = spectral density factor/ Hz = spectral density factorand
g/and g/ Hz = is the spectral noise factor.Hz = is the spectral
noise factor.
Caused by the internal electronics in theCaused by the internal
electronics in the
sensor. Random thermal noise and 1/f lowsensor. Random thermal
noise and 1/f lowfrequency random noise.frequency random noise.
It is not constant with frequency!It is not constant with
frequency!
Trouble level dropping!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
86/142
0.001g 0.01g
0,001g =100 volts!
0.1 g
Signal Level out ofsensor dropping!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
87/142
3 HzCorner
SelectSensorwith pro
lowfrequenrespons
corner!
El i i
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
88/142
Electronic noiseIncreasing!
Signal to Noise RatioPeriodic signal in random noise @ 90 %.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
89/142
Ratio = signal/noise Minimum 3:1Ratio = signal/noise Minimum
3:1
Example: Signal = 3, noise = 1Example: Signal = 3, noise = 1==
(3(32 +2 + 112) =2) = 3.163.16 5.3%5.3%
Signal = 2, noise = 1Signal = 2, noise = 1 errorerror 12 %12
%
At 10 DOF (5 aver.) error up to 35%At 10 DOF (5 aver.) error up
to 35%
At 20(10aver.) error range up to 28%.At 20(10aver.) error range
up to 28%.
At 40(20 aver.) error 25%At 40(20 aver.) error 25% Need 500
averages to approach 12%Need 500 averages to approach 12%
Reduce Noise by:
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
90/142
Most vibration sources in rotating machinery areMost vibration
sources in rotating machinery areperiodic. Therefore the
information exists at discreteperiodic. Therefore the information
exists at discretefrequencies.frequencies.
Need for bandwidth in making measurements is toNeed for
bandwidth in making measurements is toaccommodate normal variation
in the machinesaccommodate normal variation in the
machinesrotational frequency.rotational frequency.
Unwanted random noise may be reduced whenUnwanted random noise
may be reduced whennecessary by reducing the analysis
bandwidth.necessary by reducing the analysis bandwidth.
Rms noise =Rms noise = gg2/Hz * BW/Hz * BW
Reducing a 5 Hz band to 1 Hz will cause aReducing a 5 Hz band to
1 Hz will cause a 5 or 2.245 or 2.24reductionreduction--increases
the sample time by 5.increases the sample time by 5.
Purchasing low frequency sensor with higher
sensitivity!Purchasing low frequency sensor with higher
sensitivity!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
91/142
Ref: Tony Keller,Spectral Dynamics, CA.
Degrees of Freedom, Bandwidth& Averaging time?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
92/142
DOF = n = 2bT = degrees of freedom, b=DOF = n = 2bT = degrees of
freedom, b=bandwidth, T = Averaging time, t = samplebandwidth, T =
Averaging time, t = sampletime for one block= 1/b.time for one
block= 1/b.
T = sample time * N (number of blockT = sample time * N (number
of block
averages)averages) n = 2bT = 2/t*T= 2/t* N t = 2Nn = 2bT =
2/t*T= 2/t* N t = 2N
DOF = 2N( number of block averages.)DOF = 2N( number of block
averages.)
A Better Way: Synchronous Averaging.
Averages out random noise signals!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
93/142
VIBRATION READING VARIATIONS
PERSON- MOUNTING-POSITION
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
94/142
Some Interesting Highlights
Reference:
EPRI- Electric Power Research Institute
VIBRATION SENSOR MOUNTING GUIDE
Prepared by:
CSI, Knoxville, TN 1991
40%
EPRI GUIDE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
95/142
VARIATION WITH PERSON- FIVE PEOPLE MANUALLY
HOLDING ACCEL IN POSITION # 0
EPRI- Electric Power Research InstituteVIBRATION SENSOR MOUNTING
GUIDE (CSI)
BELOW 30 HZ = 60% +/- 10% EPRI GUIDE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
96/142
PERCENT VARIATION- SEVEN PEOPLE AT SAME POINT
VS. FREQUENCY- HAND PROBE WITH 2 STINGER
Useful Range
EPRI GUIDEPeak?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
97/142
HAND PROBE 2 STINGER %PERCENT DEVIATION AT
HIGH FREQUENCY
300 %
Pressure
EPRI GUIDE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
98/142
LEVEL VS. POSITION AROUND BEARING
AT LOW FREQUENCIES
Frequency 400Hz
7:1
Negative side
ERROR SOURCE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
99/142
SIGNAL CLIPPING !
SENSOR SYSTEM REVISITEDSENSOR SYSTEM REVISITEDDynamic Range?
Maximum g w/o clipping. (Not Damage!)Dynamic Range? Maximum g w/o
clipping. (Not Damage!)
Power
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
100/142
supply
Accel.
24 Vdc
12 +/- 2 Vdc
Bias Level
0 Vdc
2ma constant current
>
Data System >
Vibration
Signal>
8
DYNAMIC RANGEDYNAMIC RANGE
D i RD i R k lt / li ik lt / li i
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
101/142
Dynamic Range=Dynamic Range= max peak voltage w/o clippingmax
peak voltage w/o clipping3 x rms band limited noise floor.3 x rms
band limited noise floor.
Factors:Factors:>Bias level determines +/>Bias level
determines +/-- allowable voltage swing.allowable voltage
swing.> Bias level varies +/> Bias level varies +/-- around
10volts.around 10volts.
> Rms noise is random with 3 sigma peaks> Rms noise is
random with 3 sigma peaks> Noise varies as> Noise varies as
bandwidth.bandwidth.> Power supply allows uniform +/> Power
supply allows uniform +/-- voltage swing.voltage swing.
> Sensitivity 10, 100, 250, or 500 mV/g?> Sensitivity 10,
100, 250, or 500 mV/g?
w/ 24vsupply +/-
10 VOLT
15
10
10
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
102/142
10 VOLTLIMIT
Mostpower now
+/- 12 volts
Bias +/- 2v
5
-15
-5
-10
-10 -5 0 +5 +10
Input Voltage Swing from Accelerometer
Crystal Assuming Power Supply at 24V
But Bias level at 14 volts.
Note:
10 volt peak =
100 g 100mv/g
10 g- 1volt/g
2 g 5volt/g
1g 10volt/g
14 voltbias
Also Remember!Also Remember!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
103/142
46
Time DomainTime Domain
Peak values canPeak values can
bebe
many times highermany times higher
than singlethan singlespectralspectral
components incomponents in
TheThe FrequencyFrequency
DomainDomain
Time
Frequency
A
A
20 G MAX
100 G100g 80
secpeak
Spectrum
w/10 gbins.
CL[P
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
104/142
BIAS
VOLT
CL[P
Erratic DataErratic Data-- clippingclipping
Cli iCli i St t ?St t ?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
105/142
ClippingClipping-- Strange components?Strange components?
The FFT of a square wave consists of theThe FFT of a square wave
consists of thefundamental frequency and all oddfundamental
frequency and all oddharmonics.harmonics.
1 3 5 7 9 11 13
Accel
Frequency
50
SENSORSENSOR -- ClippingClipping
S S iti it !S S iti it !g LEVEL X SENS
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
106/142
45
Sensor Sensitivity !Sensor Sensitivity !
10, 100, 250, or 50010, 100, 250, or 500mV/g?mV/g?
Dynamic RangeDynamic Range
12 VDC nominal
Supply voltage
normally 24 VDC
g
Bias Voltage
10-12
volts
Clippingcauses DCoffsets! Zero ref.
Clipping shifts ref upcausing DC component.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
107/142
Off set looks like low frequency andtakes RC to settle down.
1/6.28RC= fL Where:R= input zC= capacity of xstalfL = Low
frequency corner
T = RC
T =1/6.28fL
Lowfrequencycorner 3 Hz
T=0.05 sec.
Cause of ski slope - low frequency noise?
C R Powersupply
Time
DC
SHIFT
Erratic DataErratic Data-- clippingclipping
Time Domain DataTime Domain Data
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
108/142
Time Domain DataTime Domain Data
47
Volts
Time (seconds)
Note exponential offsets!
What effect will this produce?
Low Frequency Noise and sum/ difference frequencies.!
Erratic DataErratic Data-- clippingclipping
ClippingClipping Strange components??
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
109/142
ClippingClipping-- Strange components??
The FFT of a square wave consists of theThe FFT of a square wave
consists of the
fundamental frequency and all oddfundamental frequency and all
oddharmonics.harmonics.
1 3 5 7 9 11 13
Accel
Frequency
50
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
110/142
AMPLITUDE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
111/142
F1 + F2 F1 F2
F1+F3 F1- F3F2 +F3 F2 F3
False Spectral Components Caused
by Clipping
AMPLITUDE
FREQUENCY
Erratic DataErratic Data -- other places to look!other places to
look! ClippingClipping !!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
112/142
pp gpp g
Look for g levels beyond the dynamic
range of the sensor. There may be clipping beyondthe frequency
range being viewed.
Accel
Frequency F max
Normal range
of interest.
51
Most Common!Most Common! NoiseNoise
--IntegrationIntegration--Low FrequencyLow Frequency
ClippingClipping--bouncybouncy--bias Instabilitybias
Instability--odd harmonicsodd harmonics--
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
113/142
pp gpp g yy yyclipping beyond analysis frequencyclipping beyond
analysis frequency
Low frequencyLow frequency--high pass filterhigh pass
filter--integrationintegration--turnturn--on time.on time.
1/rev1/rev--Base StrainBase Strain--Cable Sensitivity,
increaseCable Sensitivity, increase
resolution.resolution.
60 Hz noise60 Hz noise--Loss of IsolationLoss of
Isolation--ground loop!ground loop!
Signal lossSignal loss--check bias voltagecheck bias voltage
Change resolutionChange resolution--If amplitude changes it isIf
amplitude changes it is
Random noise and not a discrete frequencyRandom noise and not a
discrete frequency..55
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
114/142
ERROR SOURCEERROR SOURCE
SLEW RATE LIMITINGSLEW RATE LIMITING
THE HIGHER THE VOLTAGE SWING- THE LOWER THE
FREQUENCY AT WHICH SLEWING ERROR OCCURS.
Gain change due to
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
115/142
FREQUECY RESPONSE TEST
VOLTAGESWING slew rate limiting!
Effect of slew limiting!Effect of slew limiting!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
116/142
IDEAL
Slew limited.
Slew Limiting causes reduction in highfrequency gain and peaky
signal!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
117/142
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
118/142
+ 8V
Can cause DC offset aftersignal burst!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
119/142
LINE CAPACITY LOADING!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
120/142
SLEWING RATE INCREASES WITH FREQUENCY
REQUIRED CURRENT = I = C de/dt
SR = 6.28 frequency Emax
Sl R t
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
121/142
Slew Rate
Slewing Rate example
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
122/142
(10 VOLTS)6.28 x 10,000 x 10
0.1 VOLTS/g
6,28 x freq. X EmaxEmax = 0.1 x 100 = 10 volts
628,000 volts/sec
0.628volts / micro- sec
100
10,000 Hz
100mv/g
Frequency
Sensitivity
Slew Rate
g
Power Supply Current Required
I = C de/dt
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
123/142
Where:
I = current C= capacitance =15pf/ft
de/dt = Slew Rate .628V/ u-sec
I = 1000(15 x 10 - 12) .638 V/10 -6
I = 9ma
CABLE LENGTH @ CURRENTCABLE LENGTH @ CURRENT@ 10kHz@
10kHz--15pfd/ft15pfd/ft--5volts5volts
Approximate cc power supply current:Approximate cc power supply
current:
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
124/142
pp p pp yy
0.6 ma0.6 ma 125 ft.125 ft.
1.2 ma1.2 ma 250 ft.250 ft.
2.4ma2.4ma 500 ft.500 ft.
4.8 ma4.8 ma 1000 ft.1000 ft.
9.6 ma9.6 ma 2000 ft.2000 ft.
Sensor High -Low FrequencyMeasurements?
STRANGE SIGNALS ?STRANGE SIGNALS ?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
125/142
40
BELOW 500 RPMBELOW 500 RPMLF NOISE, FLOOR/MOUNTINGLF NOISE,
FLOOR/MOUNTING
AROUND 60 Hz (1x) GROUND NOISE/STRAIN!AROUND 60 Hz (1x) GROUND
NOISE/STRAIN! ABOVE 5/10 kHzABOVE 5/10 kHz-- MOUNTING,
CLIPPING,MOUNTING, CLIPPING,
VFD, OR GEAR MESHVFD, OR GEAR MESH !!
Usable Frequency Range
Frequency
Accel.Output
Volts
+5%
-5%
+5%
-5%
fn
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
126/142
Error Sources!Error Sources!
Measuring Shock orMeasuring Shock orTransient Impulse
withTransient Impulse with
accelerometer.accelerometer.
To avoidaccelerometer ringing
Impact response
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
127/142
accelerometer ringing
in an impact test:fn > 10/T & flp =0.5 fn
Where: fn is mounted resonance.
T
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
128/142
Shock & Vibration Handbook 3rd Edition
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
129/142
Eller & Whittier
Endevco Corp. Chap. 12
Shock & Vibration Handbook 3rd Edition
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
130/142
Eller & Whittier
Endevco Corp. Chap. 12
Shock & Vibration Handbook 3rd Edition
Droop Error!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
131/142
Droop error
To avoid low frequency error and zero shift:
Amplitude error
Actual impact input.
Measured impact.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
132/142
Zero shift
Low frequency response < 0.008/T
Where: T = pulse duration.
Shock & Vibration Handbook 3rd Edition
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
133/142
Eller & Whittier
Endevco Corp. Chap. 12
Shock & Vibration Handbook 3rd Edition
Key Items to Observe for Impact
To minimize Amplitude Errors &To minimize Amplitude Errors
&UndershootUndershoot
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
134/142
UndershootUndershoot
Low Frequency Corner < .008/ T[PulseLow Frequency Corner <
.008/ T[Pulseduration.]duration.]Ex. T=0.2 sec. Low corner =0.04
Hz.Ex. T=0.2 sec. Low corner =0.04 Hz.
To minimize RingingTo minimize RingingResonance Fn must be >
10/T andResonance Fn must be > 10/T and
Low Pass Filter less than 0.5 FnLow Pass Filter less than 0.5
FnEx. T= 1millisec, Fn => 10 kHz.Ex. T= 1millisec, Fn => 10
kHz.
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
135/142
GETTING USEFULGETTING USEFULINFORMATIONINFORMATION
FROM YOURFROM YOUR
ACCELEROMETER?ACCELEROMETER?
[[See session onBearing Lifeguard tm
Multiple Discriminant Analysis..]]
SAMPLE
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
136/142
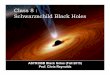
Est. Repair Cost=$2,200
Est AvoidedCost =$22,000
MAIN CAMPUSA A PULIFE FACTORLIFE FACTOR
DISTRIBUTIONDISTRIBUTION35
MACHINES 144 MACHINESHAVE REDUCEDBEARING LIFE!
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
137/142
0
5
10
15
20
25
30
100 75 50 25 FAIL
AHU
PUMPS
MOTORS
L-FACTOR
CLICK HERE FOR MEAN TREND
ILLUSTRATION
PERCENT LIFE EXPECTANCY
BEARING LIFE!
NUMBER OF MACHINES BY LIFE FACTOR
CHANGE IN EXPECTED BEARING LIFEWITH CHANGE IN MACHINE SPEED
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
138/142
DROP IN LEF VS. SPEED
0
10
20
30
40
5060
70
80
90
1 2 31080 1800 3600 RPM
%L
10
WB,K2
BEARING LIFE FACTORDISTRIBUTION
50
60
BADMACHINES
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
139/142
0
10
20
30
40
1 ALERT BAD
AHUPUMPS
MOTORS
BAD MOTORS
1-3 3-7 7-10L-FACTOR
MACHINES
SAMPLE
NUMBER OF MACHINES BY LIFE FACTOR
FACILITY LIFE FACTOR TREND
10
12
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
140/142
0
2
4
6
8
10
JAN FEB MAR APRIL MAY JUNE
ILLUSTRATIONMEAN LIFE FACTOR TREND[100 MACHINES]
Questions?Questions?Where to get more information ?Where to get
more information ?
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
141/142
Contact your sensor manufacturer! Contact the Vibration
Institute!
Dynamic Measurement Consultants!
[email protected]
57
mailto:[email protected]:[email protected]
-
7/26/2019 Mfpt 59 Acceleration Measurements Session
4-19-05_comp
142/142