Embed Size (px)
Citation preview
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Myopic Unfalsified Control: A Gradient Approach to
Adaptation
Michael G. SafonovUniversity of Southern California
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
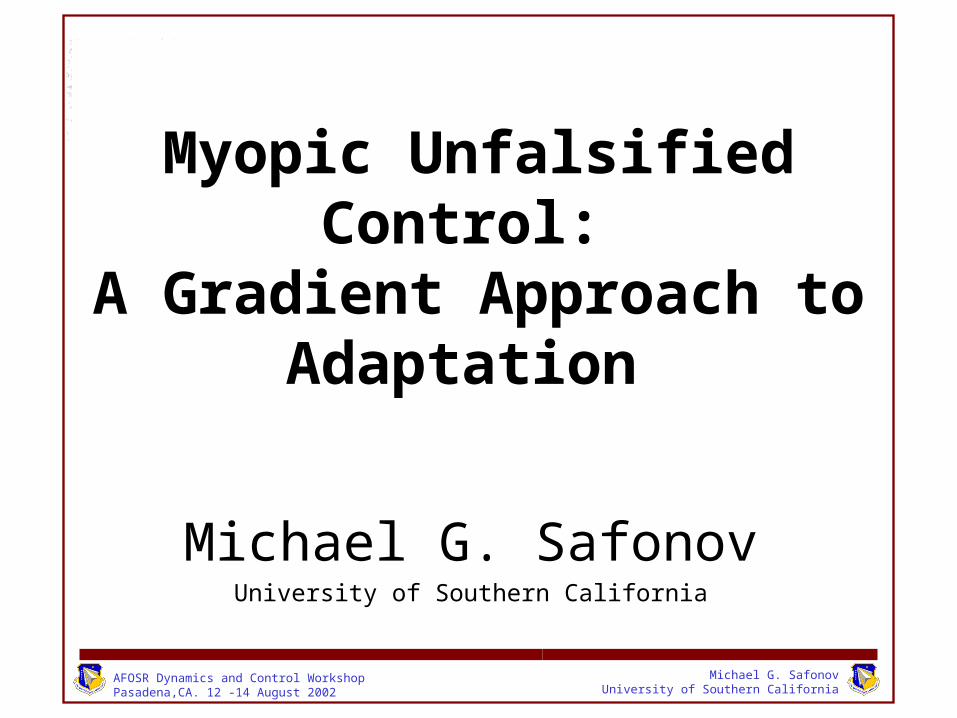
Background: Unfalsified Control ONLY 3 elements
candidate controller
hypotheses
FALSIFIED
COMPUTER SIEVE
Unfalsified K
M. G. Safonov. In Control Using Logic-Based Switching, Spring-Verlag, 1996.
goalsdata
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
An Achilles heel of modern system theory has been the
habit of ‘proof by assumption’
Theorists typically give insufficient attention to the possibility of future observations which may be at odds with assumptions.
Motivation for Unfalsification:
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Galileo: open-eyed “data-driven”“data-driven”
Reality is what we observe.
Two ways to learn & adapt: Observation vs. Introspection
vs.
‘Curve-Fitting’
Plato: introspective“assumption driven”
Reality is an ideal, observable only through noisy sensors.
‘Probabilistic Estimation’MODELS approximate Observed Data Data approximates Unobserved TRUTH
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
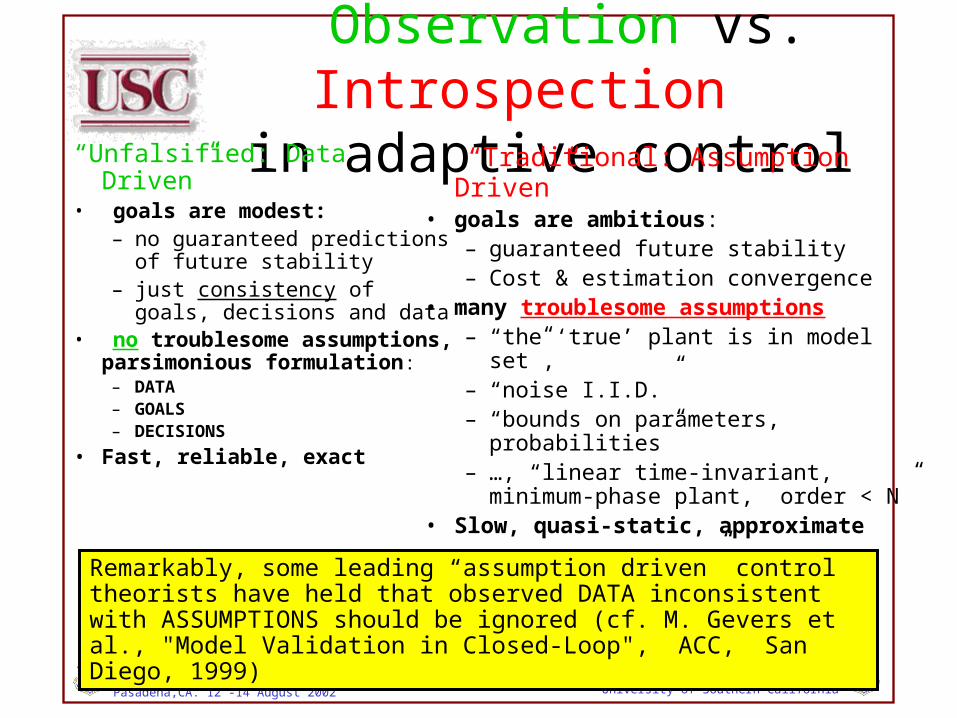
Observation vs. Introspection in adaptive control
“Unfalsified: Data Driven”• goals are modest:
– no guaranteed predictions of future stability
– just consistency of goals, decisions and data
• no troublesome assumptions, parsimonious formulation:
– DATA – GOALS – DECISIONS
• Fast, reliable, exact
“Traditional: Assumption Driven”• goals are ambitious:
– guaranteed future stability– Cost & estimation convergence
• many troublesome assumptions– “the ‘true’ plant is in model set”, – “noise I.I.D.” – “bounds on parameters, probabilities”– …, “linear time-invariant, minimum-
phase plant, order < N”• Slow, quasi-static, approximate
Remarkably, some leading “assumption driven” control theorists have held that observed DATA inconsistent with ASSUMPTIONS should be ignored (cf. M. Gevers et al., "Model Validation in Closed-Loop", ACC, San Diego, 1999)
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
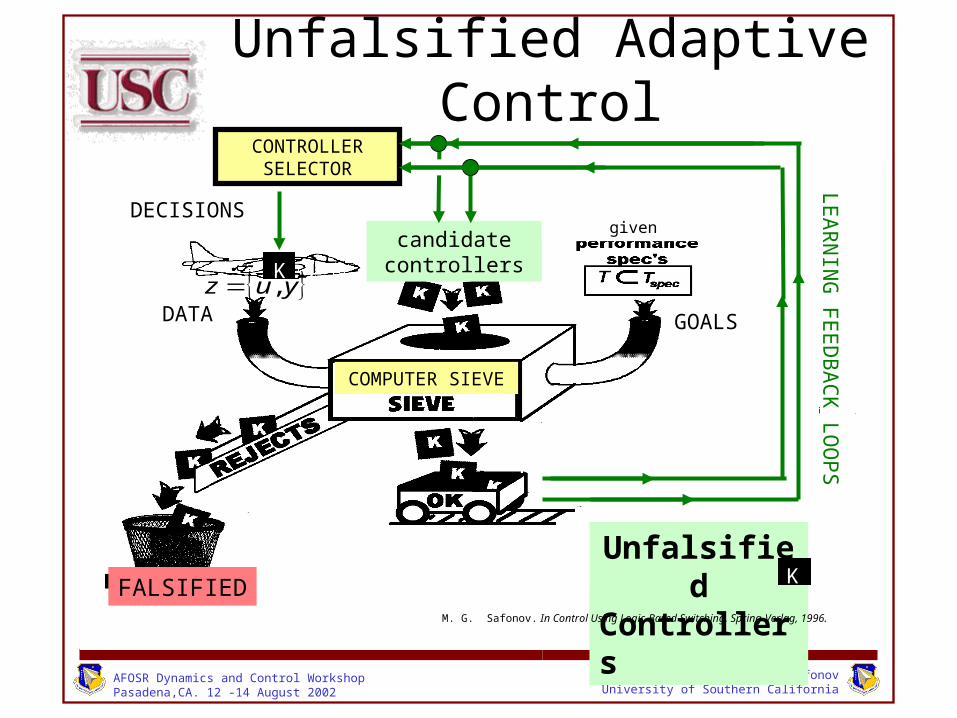
Unfalsified Adaptive Control
candidate controllers
FALSIFIED
COMPUTER SIEVE
LEA
RN
ING
FE
ED
BA
CK
LOO
PS
K
UnfalsifiedControllers
K
given
M. G. Safonov. In Control Using Logic-Based Switching, Spring-Verlag, 1996.
GOALS
CONTROLLER SELECTOR
DATA yuz ,
DECISIONS
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
UnfalsifiedControllers
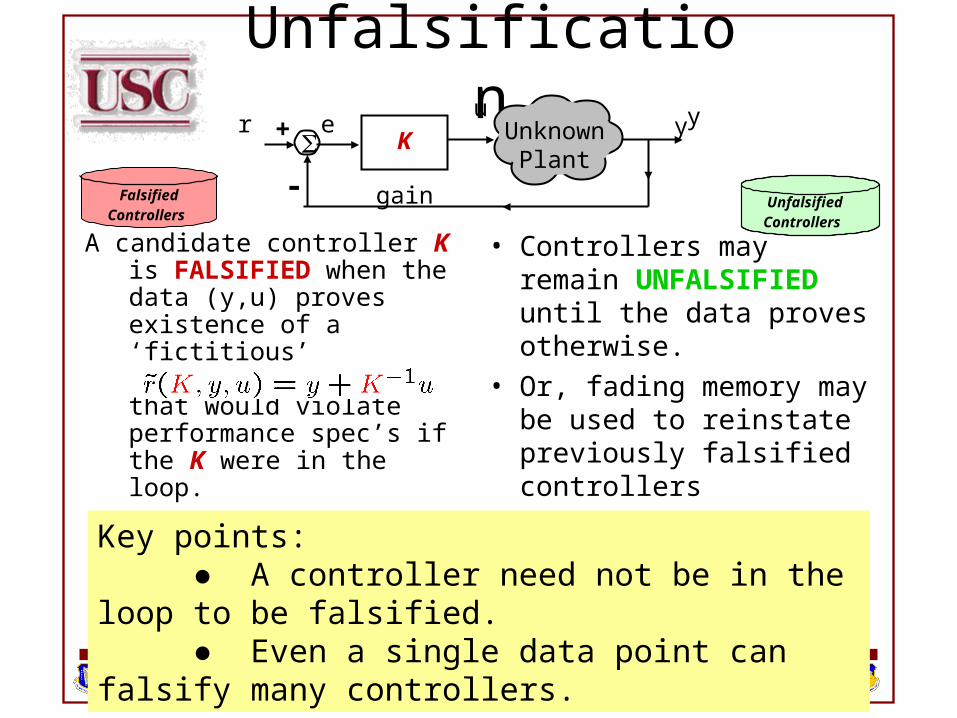
Unfalsification
A candidate controller K is FALSIFIED when the data (y,u) proves existence of a ‘fictitious’
that would violate performance spec’s if the K were in the loop.
• Controllers may remain UNFALSIFIED until the data proves otherwise.
• Or, fading memory may be used to reinstate previously falsified controllers
FalsifiedControllers
Key points: ● A controller need not be in the loop to be falsified. ● Even a single data point can falsify many controllers.
Unknown Plant
K
gain
u
ye
-
+ yr
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
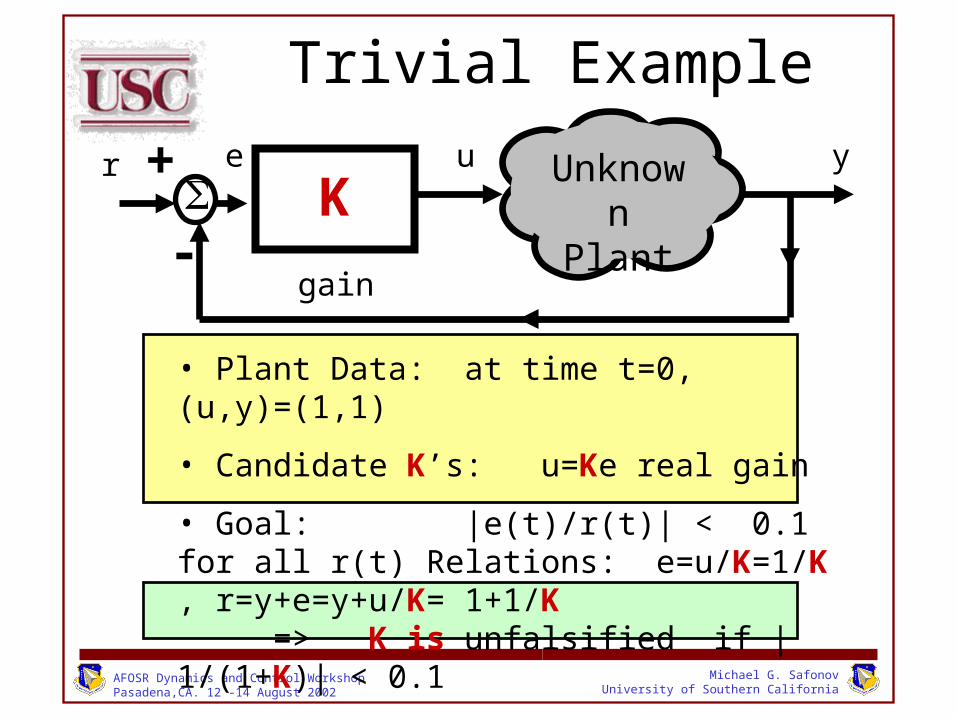
• Plant Data: at time t=0, (u,y)=(1,1)
• Candidate K’s: u=Ke real gain
• Goal: |e(t)/r(t)| < 0.1 for all r(t) Relations: e=u/K=1/K , r=y+e=y+u/K= 1+1/K => K is unfalsified if |1/(1+K)| < 0.1
=> unfalsified K’s: K>9 or K<-11
Trivial Example
Unknown PlantK
gain
r u ye
-
+
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
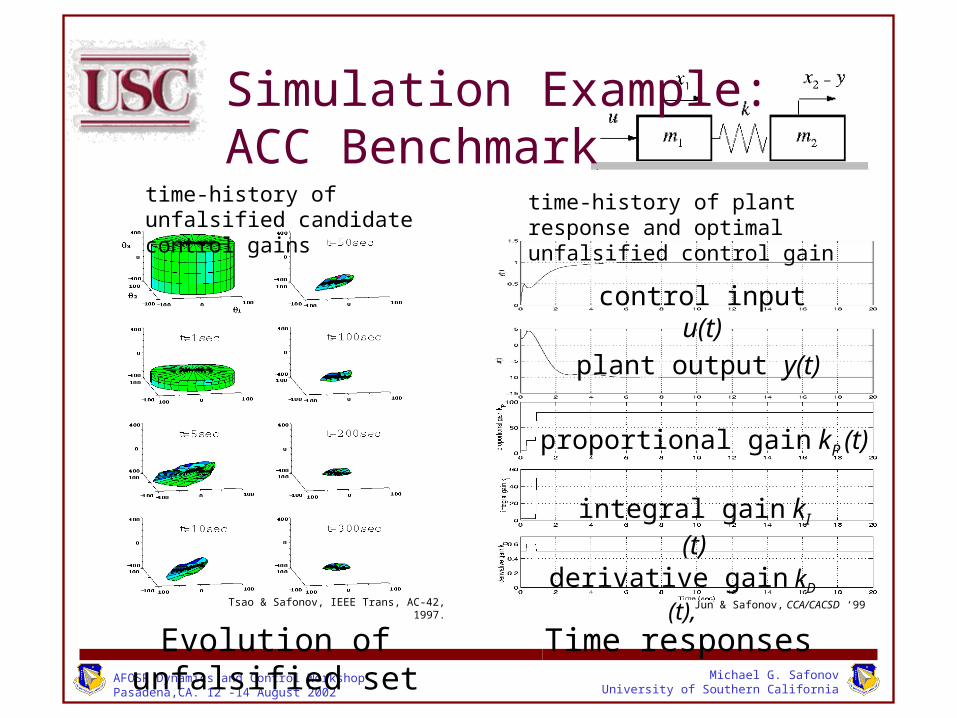
Jun & Safonov, CCA/CACSD ‘99
control input u(t)
proportional gain kP (t)
integral gain kI (t)
derivative gain kD (t),
plant output y(t)
Evolution of unfalsified set Time responses
Tsao & Safonov, IEEE Trans, AC-42, 1997.
time-history of unfalsified candidate control gains
time-history of plant response and optimal unfalsified control gain
Simulation Example: ACC Benchmark
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Simulation Example: Missile
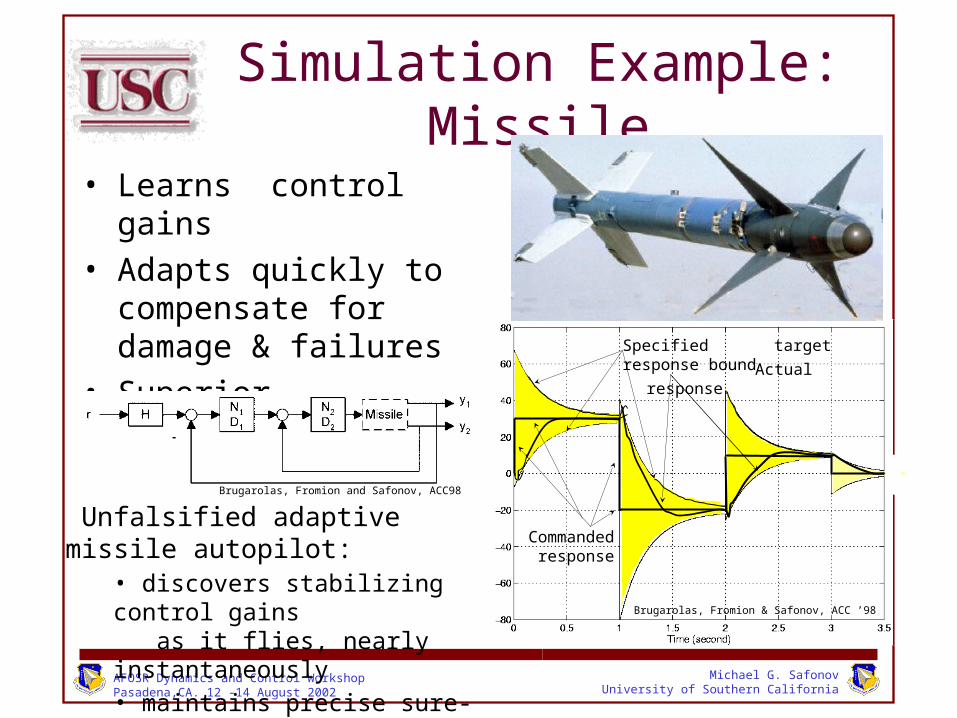
• Learns control gains
• Adapts quickly to compensate for damage & failures
• Superior performance Specified target response bound
Actual response
Commanded response
Brugarolas, Fromion & Safonov, ACC ’98
Unfalsified adaptive missile autopilot:• discovers stabilizing control gains as it flies, nearly instantaneously• maintains precise sure-footed control
Brugarolas, Fromion and Safonov, ACC98
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
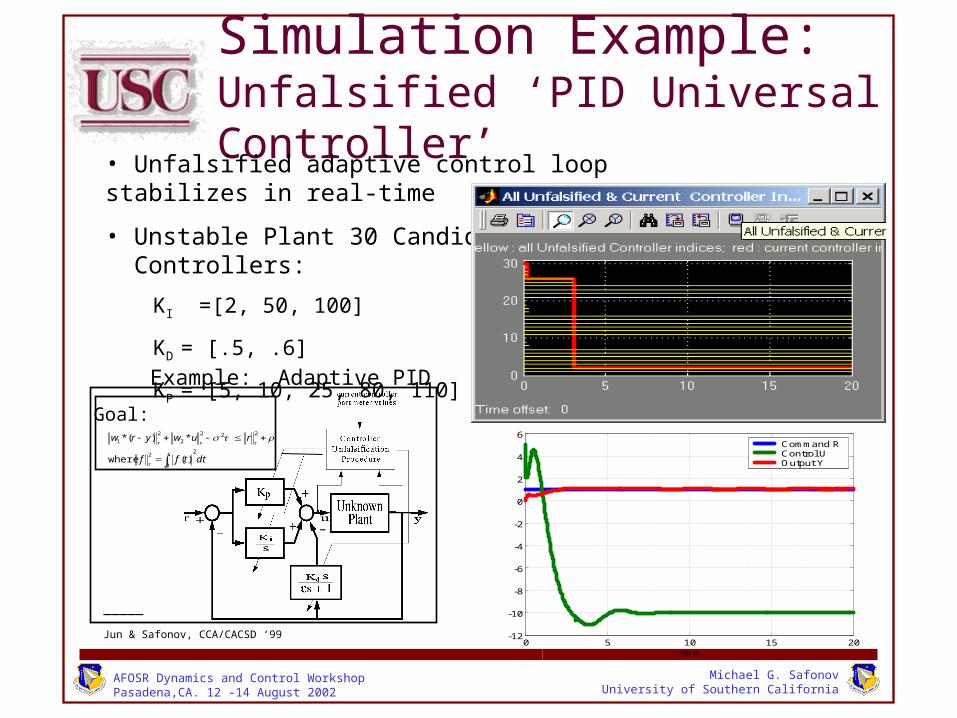
Simulation Example: Unfalsified ‘PID Universal Controller’
—————
Jun & Safonov, CCA/CACSD ‘99
Example: Adaptive PID
dttff
ruwyrw2
0
2
222
2
2
1
)( where
*)(*
Goal:
• Unfalsified adaptive control loop stabilizes in real-time
• Unstable Plant 30 Candidate PID Controllers:
KI =[2, 50, 100]
KD = [.5, .6]
KP = [5, 10, 25, 80, 110]
0 5 10 15 20-12
-10
-8
-6
-4
-2
0
2
4
6
time
Command RControl UOutput Y
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Other People’s Successes with Unfalsified Control
• Emmanuel Collins et al. (Weigh Belt Feeder adaptive PID tuning, CDC99)
• Kosut (Semiconductor Mfg. Process run-to-run tuning, CDC98)
• Woodley, How & Kosut (ECP Torsional disk control, adaptive tuning, ACC99
• Razavi & Kurfess, Int. J ACSP, Aug. 2001
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
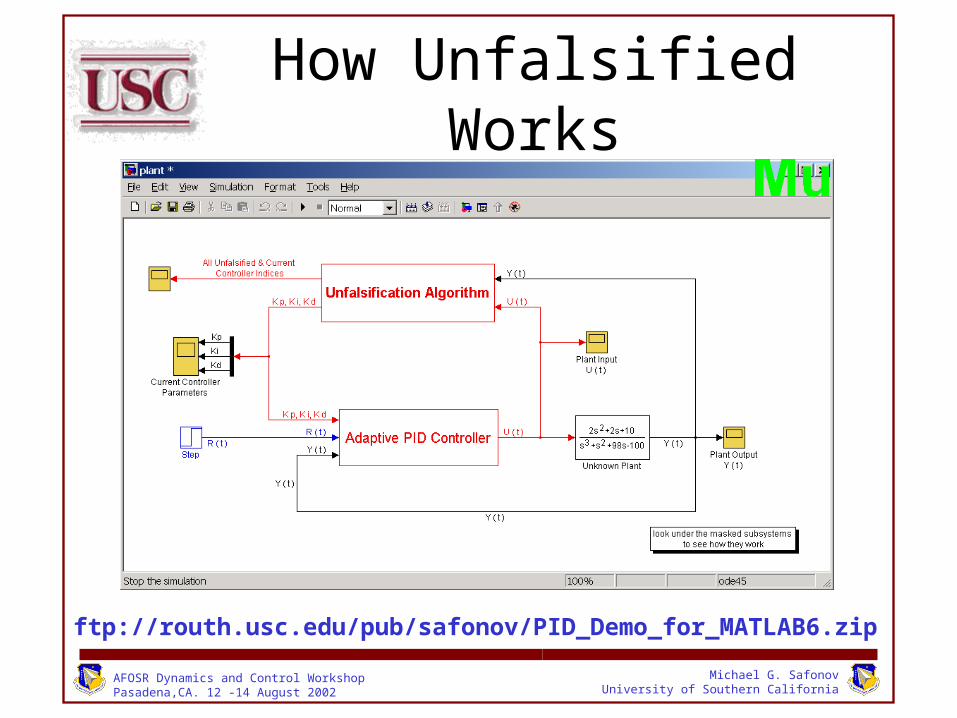
How Unfalsified Works
ftp://routh.usc.edu/pub/safonov/PID_Demo_for_MATLAB6.zip
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
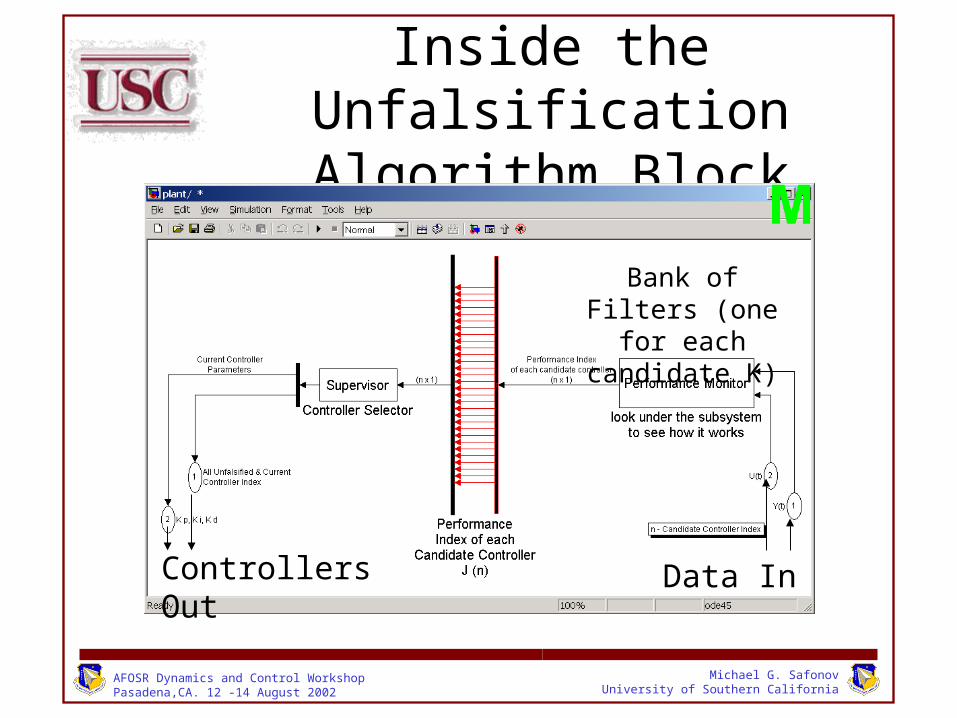
Inside the Unfalsification Algorithm Block
Data InControllers Out
Bank of Filters (one for each candidate K)
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Why doesn’t everybody use unfalsified control?
• Unfalsified Adaptive Control is better:– fast– reliable– exact
• Full and precise use of all available evidence– meets Russell’s criterion: “Intimate association
between observation and hypothesis”
• But, it’s not yet widely used. Why?
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Unfalsified Adaptive Control:Some Invalid Concerns
• Strange noise-free, model-free formulation • You can’t prove convergence or stability (unless
you assert the usual adaptive control assumptions)• Claims seem to good to be true:
– Fast, reliable– Handles noise without noise models– Works for non-minimum phase plants– No need for plant degree bounds– No need for plant models
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Unfalsified Adaptive Control:A Valid Concern
• Unfalsified Adaptive Control can be computationally intensive: – Computationally intensive when there are many
candidate controllers– Requires global minimization of unfalsified
cost levels – May require ‘gridding’ (like multi-model
adaptive)
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Solutions: How to address concerns over unfalsified?
1. Direct comparision with traditional methods?
2. Make unfalsified more like traditional methods?– make it slow, quasi-static (break its legs):
• differential equation update, or
• run-to-run controller update
– make it myopic, near-sighted (break its spectacles): • do local optimization only, not global
• use steepest descent, gradient-based approaches to limit computational complexity
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
• Traditional assumptions: – LTI minimum phase plant No– Known upper bound for plant order No– Known relative degree of the plant No– Known sign of the high frequency gain No
• Alternative ‘universal controllers’ (Martensson, 1985; Fu et al., 1986):– Require less prior information YES – Search a set of controllers and switch
to the one satisfying a given performance YES – Assume the plant to be LTI No
Traditional & Alternative Unfalsified
Solution #1: Direct Comparison
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
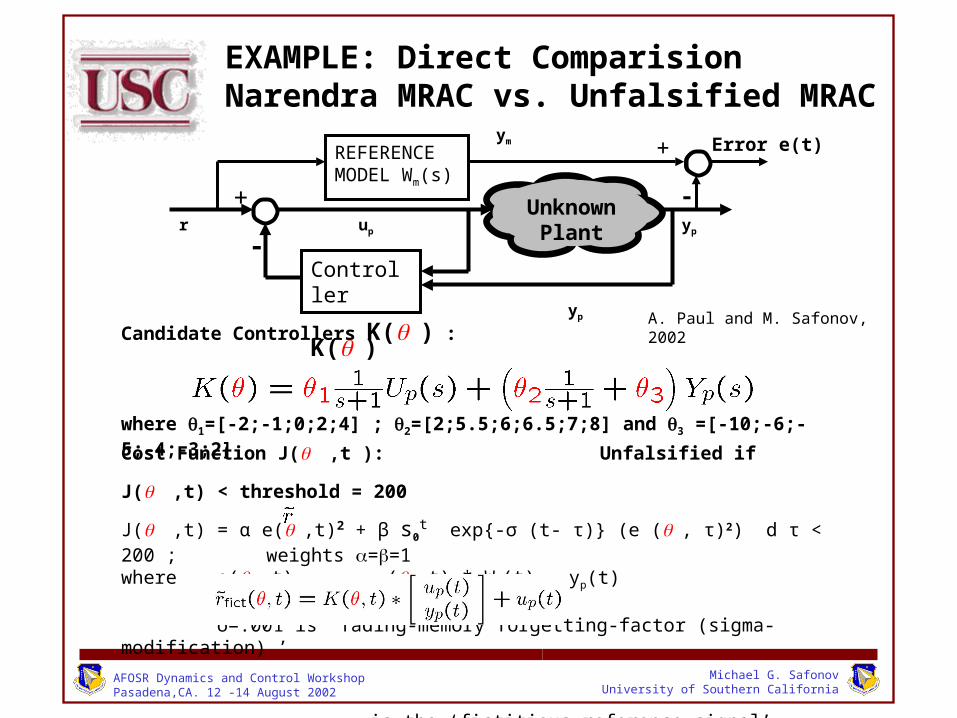
EXAMPLE: Direct Comparision Narendra MRAC vs. Unfalsified MRAC
Cost Function J( ,t ): Unfalsified if J( ,t) < threshold = 200
J( ,t) = α e(,t)2 + β s0t exp{-σ (t- τ)} (e (, τ)2) d τ < 200 ; weights ==1
where e( ,t) = fict(,t) * Wm(t) - yp(t)
σ=.001 is ‘fading-memory forgetting-factor (sigma-modification) ’
is the ‘fictitious reference signal’
Controller K()
up
yp
yp
REFERENCEMODEL Wm(s)
+r
-
-
+ Error e(t)ym
Unknown Plant
Candidate Controllers K() :
where 1=[-2;-1;0;2;4] ; 2=[2;5.5;6;6.5;7;8] and 3 =[-10;-6;-5;-4;-3;2]
A. Paul and M. Safonov, 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
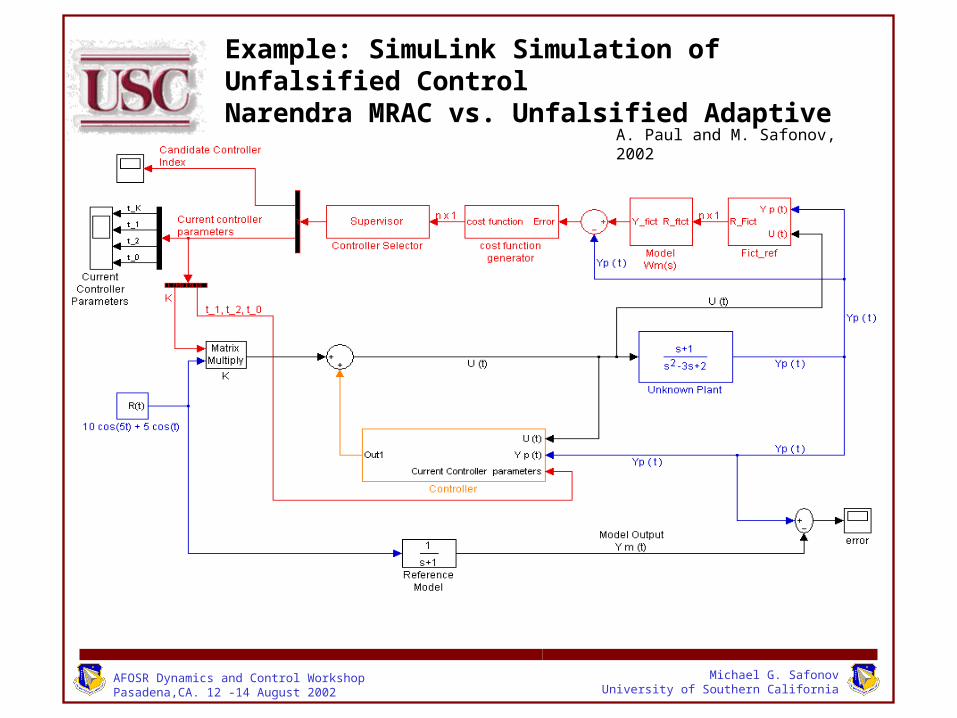
Example: SimuLink Simulation of Unfalsified ControlNarendra MRAC vs. Unfalsified Adaptive
A. Paul and M. Safonov, 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
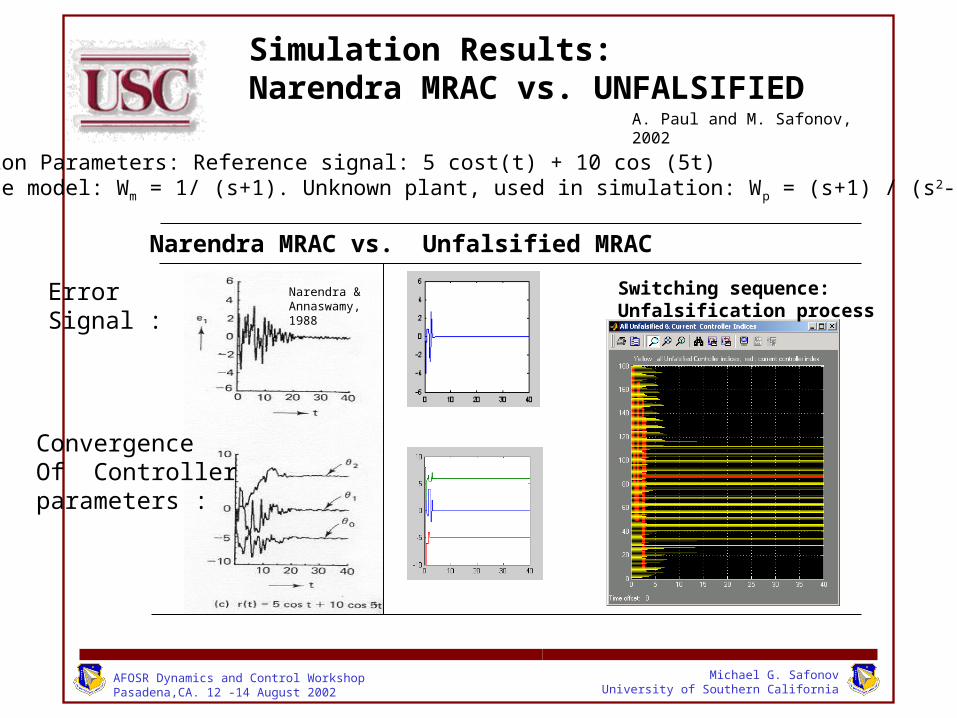
Simulation Results:Narendra MRAC vs. UNFALSIFIED
Simulation Parameters: Reference signal: 5 cost(t) + 10 cos (5t)Reference model: Wm = 1/ (s+1). Unknown plant, used in simulation: Wp = (s+1) / (s2-3s+2)
Narendra MRAC vs. Unfalsified MRAC
Switching sequence:Unfalsification process
Narendra & Annaswamy, 1988
ConvergenceOf Controllerparameters :
ErrorSignal :
A. Paul and M. Safonov, 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Direct Comparison:MRAC vs. Unfalsified
Tsao & Safonov, CCA/CACSC’99T. C. Tsao and M. G. Safonov. Int. J. Adaptive Control and Signal Processing, 15:319–334, 2001.
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
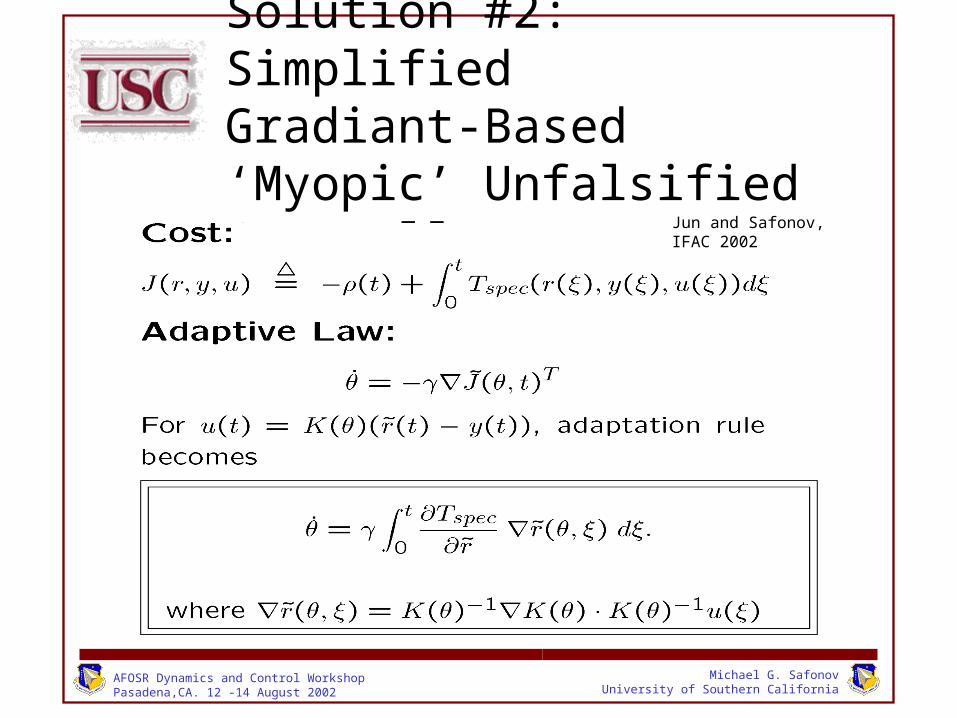
Solution #2: Simplified Gradiant-Based ‘Myopic’ Unfalsified Controller (IFAC 2002)
Jun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
• Similar in most ways to traditional adaptive– Simple to implement, low computational load– Uses only local (myopic) analysis of data– Slow, quasi-static adaptation
– Same as ‘MIT Rule’ if MRAC cost and no s dt
• But even myopic unfalsified is better– Always fewer assumptions, often slightly faster– Data-driven scientific logic of unfalsification is
inherently more reliable
Properties of ‘Myopic’ Unfalsified Adaptive Control
Jun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
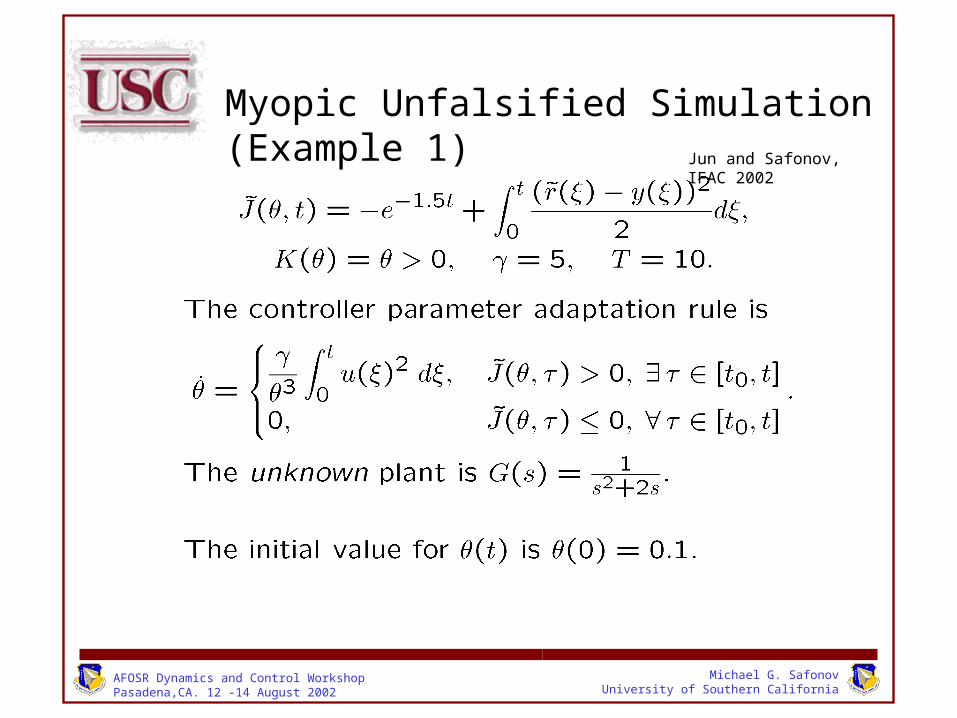
Myopic Unfalsified Simulation (Example 1)Jun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
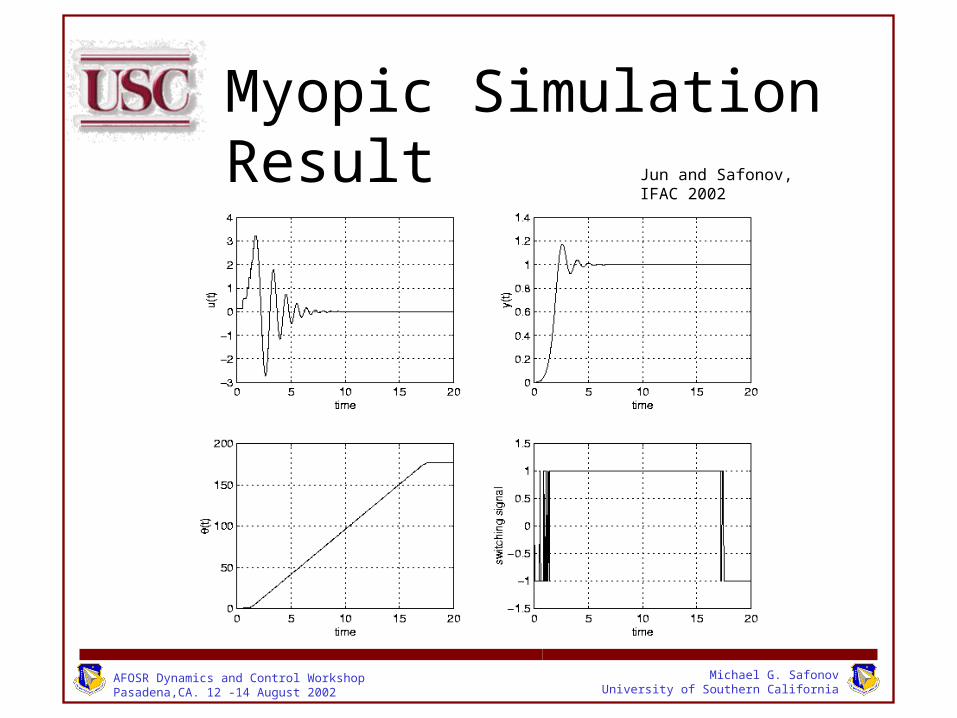
Myopic Simulation ResultJun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
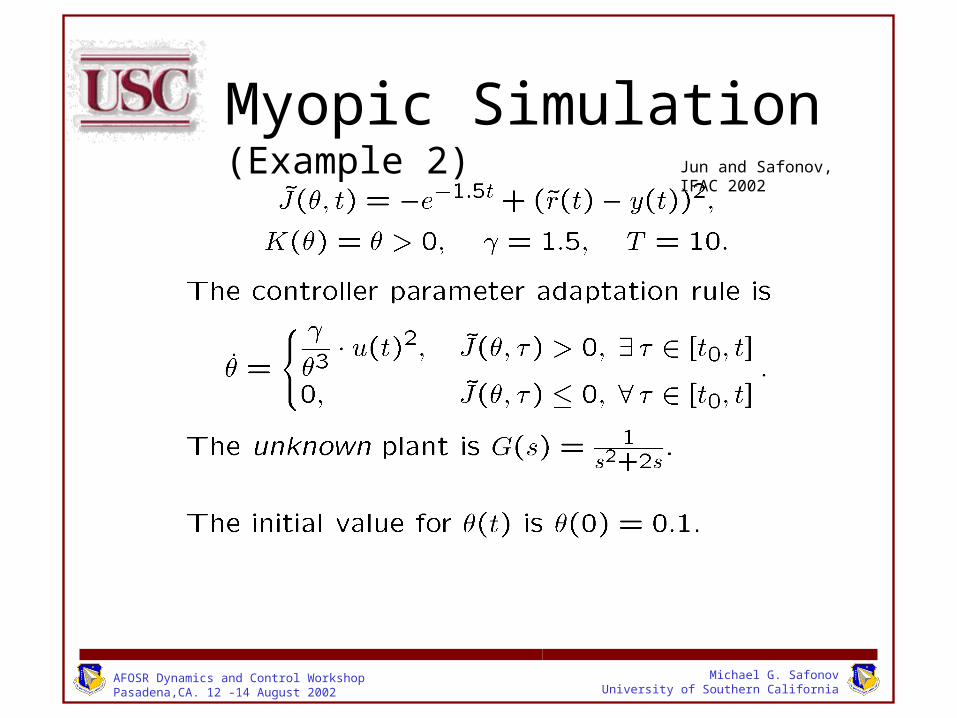
Myopic Simulation (Example 2)Jun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
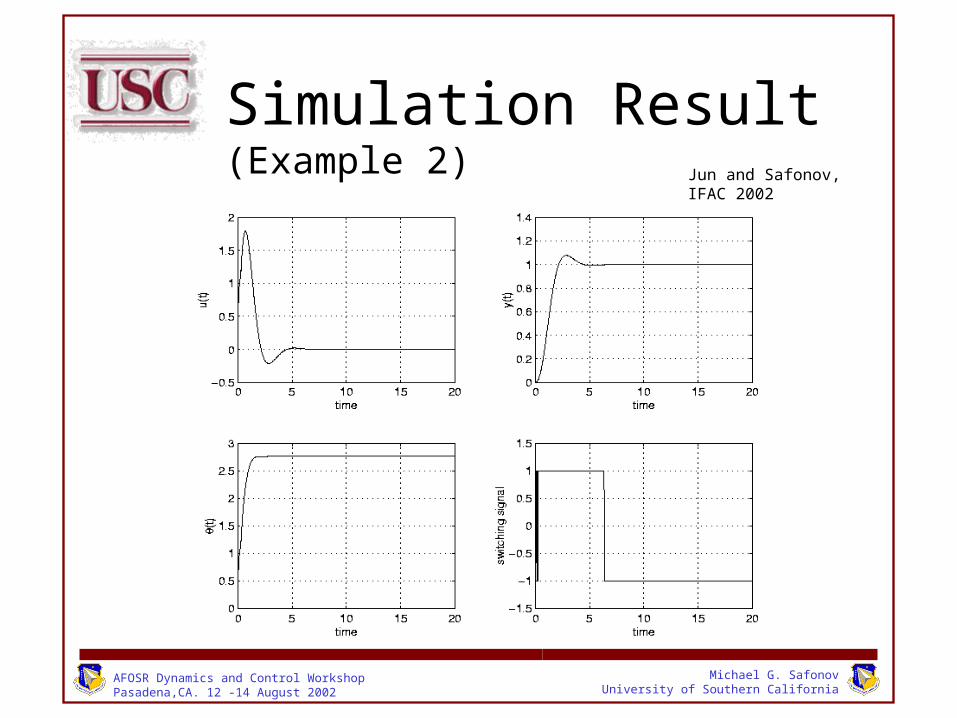
Simulation Result (Example 2)Jun and Safonov, IFAC 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
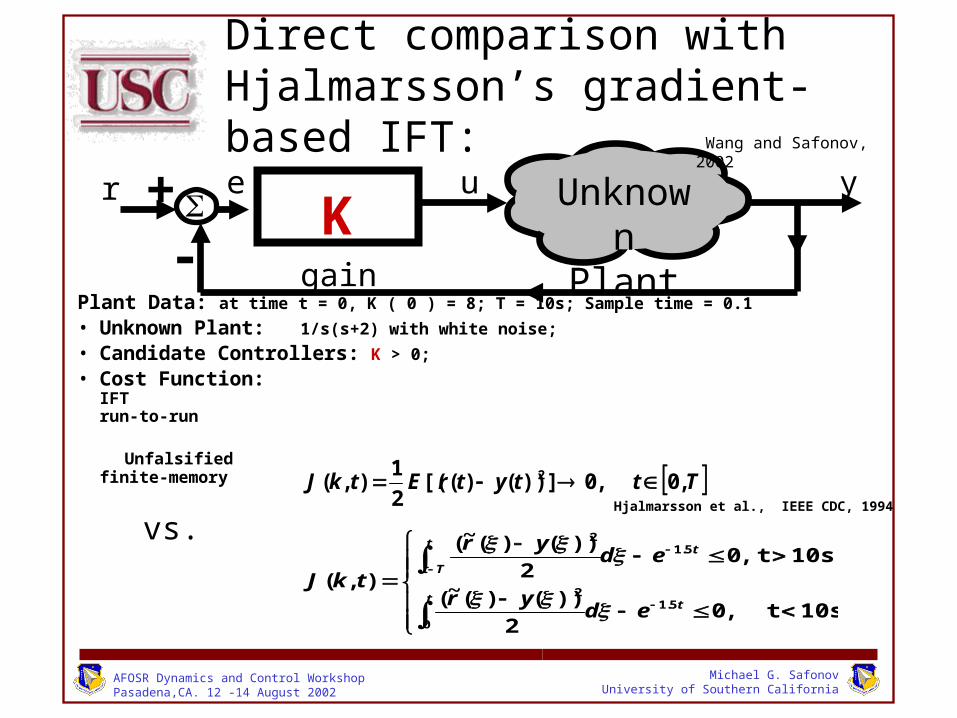
Direct comparison with Hjalmarsson’s gradient-based IFT:
Plant Data: at time t = 0, K ( 0 ) = 8; T = 10s; Sample time = 0.1
• Unknown Plant: 1/s(s+2) with white noise;
• Candidate Controllers: K > 0;
• Cost Function:IFTrun-to-run
Unfalsifiedfinite-memory
Unknown PlantK
gain
r u ye
-+
10st ,02
))()(~(
10st ,02
))()(~(
),(5.1
0
2
5.12
tt
tt
Tt
edyr
edyr
tkJ
TttytrEtkJ ,0 ,0]))()([(2
1),( 2
Wang and Safonov, 2002
Hjalmarsson et al., IEEE CDC, 1994
vs.
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
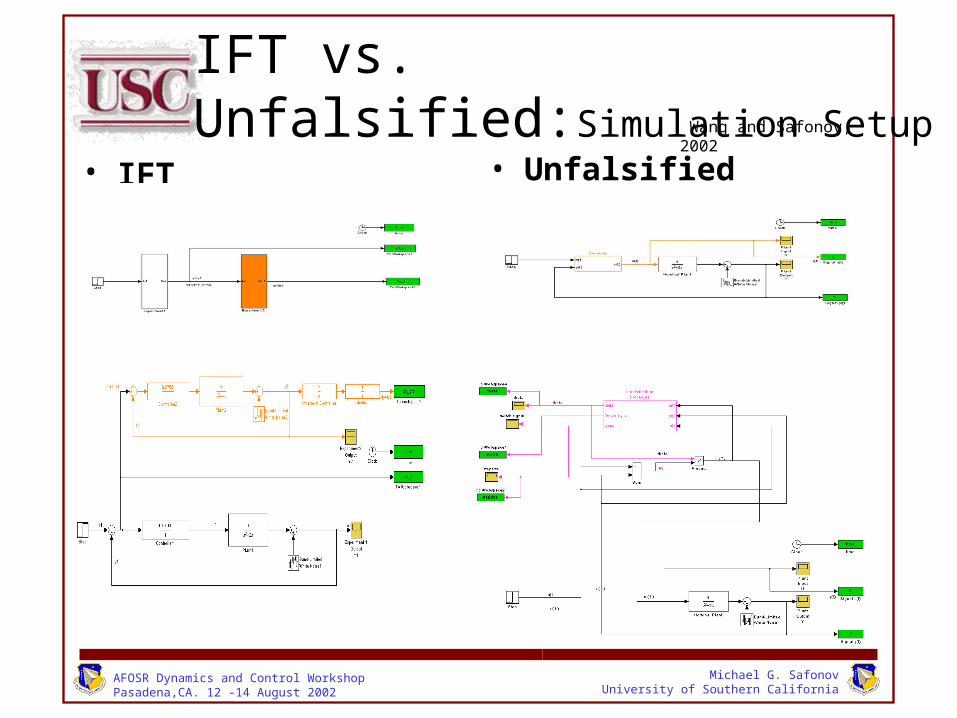
IFT vs. Unfalsified:Simulation Setup
• IFT • Unfalsified
Wang and Safonov, 2002
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
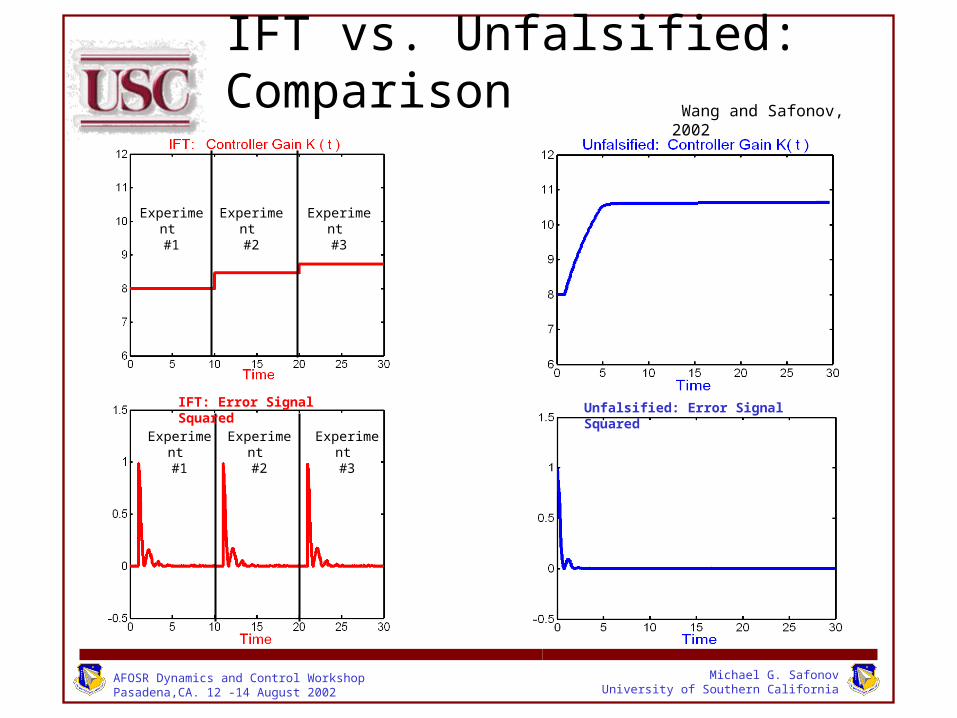
IFT vs. Unfalsified: Comparison Wang and Safonov, 2002
Experiment #1
Experiment #2
Experiment #3
Experiment #1
Experiment #2
Experiment #3
IFT: Error Signal Squared Unfalsified: Error Signal Squared
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Conclusions• Introspective models are not
adequate for analyzing adaptation
• To explain learning and adaptation, we need the open-eyed, data-driven scientific logic of unfalsification
• Unfalsified control is better than traditional assumption-driven adaptive control, even when crippled and myopic
Michael G. SafonovUniversity of Southern California
AFOSR Dynamics and Control WorkshopPasadena,CA. 12 -14 August 2002
Selected Referenceshttp://routh.usc.edu