Embed Size (px)
DESCRIPTION
Micro-Simulation of Automated Vehicles with Minimal Central Control. Advanced Transit Association Annual Technical Meeting January 12, 2008 Washington, DC Robert Johnson R. E. Johnson Consulting Rockville, Maryland www.REJConsult.com. Different Types of Automated Transit Vehicles. - PowerPoint PPT Presentation
Citation preview

Micro-Simulation of Automated Vehicleswith Minimal Central Control
Advanced Transit Association Annual Technical Meeting
January 12, 2008
Washington, DC
Robert Johnson
R. E. Johnson ConsultingRockville, Maryland
www.REJConsult.com

www.REJConsult.com 2
Different Types ofAutomated Transit Vehicles
• Track based
– Run on special track that provides lateral guidance and power (most People Movers are in this category)
• Automated Road Vehicles
– Steer themselves along a flat surface without mechanical guidance
– Have a self-contained power supply
– Max speed 20 - 25 mph (32 - 40 kph) on exclusive roadway

www.REJConsult.com 3
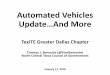
Examples ofSmall Automated Road Vehicles
CyberCab: proposed by 2getthere which operated the first public ARV
ULTra: scheduled to begin service in 2009 at Heathrow airport, London

www.REJConsult.com 4
Presentation: Three Related Topics
• Micro-simulation model for Automated Road Vehicles
• Using the model to demonstrate a simple vehicle-based control strategy
• Simulation of a shuttle application

www.REJConsult.com 5
Simulation represents guideway as straight segments alternating with circular arcs

www.REJConsult.com 6
Library of Special Guideway Elements(in Various Stages of Development)
• End-of-line station
• Center platform station
• “T” Intersection

www.REJConsult.com 7
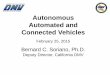
Vehicle-based Control System:How to Handle Conflicts
• Vehicles know the complete layout of the system, and know exactly where they are
• At each merge or crossing point, one lane always has priority
• If a vehicle is in the low priority lane, it uses its sensors to scan the high priority lane, and yields if a vehicle is detected

www.REJConsult.com 8
Vehicle in Low Priority Lane Yields

www.REJConsult.com 9
Vehicle-based Control System (cont.)
• Vehicles use sensors to watch for objects in their path (another vehicle or foreign object)
• If unexpected object detected, vehicle stops and notifies human operator at central control
• Central control computer:
– Assigns destinations to vehicles
– Holds vehicles at stations to smooth system flows
– No safety-related functions

www.REJConsult.com 10
Example Application - Shuttle
• Two-way guideway with a station at each end
• Six-passenger, shared vehicles
• 5 second minimum headway
• Maximum passengers per hour per direction
– 4320 theoretical (6*3600/5)
– Practical maximum is probably between 1000 and 2000
• Better than conventional people mover shuttle since can give riders very short wait times (say, 60 sec max)

www.REJConsult.com 11
(Very Short) Shuttle UsingAutomated Road Vehicles

www.REJConsult.com 12
End-of-Line StationOutbound paths

www.REJConsult.com 13
End-of-Line StationInbound paths - Vehicles back into berths

www.REJConsult.com 14
Path-Crossing ConflictVehicle Leaving Berth Yields

www.REJConsult.com 15
Merge ConflictVehicle From Berth Nearer Exit Yields

www.REJConsult.com 16
Merge Conflict Leaving Station
Click image at left to play video if .WMV file was downloaded
OR
Press button below to play video from web

www.REJConsult.com 17
Vehicles Crossing Paths
Click image at left to play video if .WMV file was downloaded
OR
Press button below to play video from web

www.REJConsult.com 18
Simulation of Complete Shuttle
Click image at left to play video if .WMV file was downloaded
OR
Press button below to play video from web

www.REJConsult.com 19
Conclusions and Future Work
• Vehicle-based control seems feasible, at least in simple systems
• Shuttle systems could be implemented at very low cost, after development of electronics for vehicle
• Next step: develop detailed operating rules for vehicles in T intersections and center platform stations