Embed Size (px)
Citation preview

Mike Grant
ARSF Data Analysis Node

ARSF Data Analysis Node
Based at Plymouth Marine Laboratory NERC Collaborative center
Brief history ARSF processing was in-house via
several people until 2006/7 Staff changes lost expertise +
growth in data volume and complexity meant the processing became backlogged
Addressed by a move of the processing to a specialist center

Why PML?
>10 years of remote sensing expertise
Strong computing skills and capacity
ARSF funds ~3 processors, but PML brings this up to 7 at times of high load
Links to science and international collaboration
ARSF overflight of Plymouth Sound, 2006

Hyperspectral data processing
Level 0 (raw) to level 1b GPS navigation Radiometric correction Formatting +
transformations Timing + positioning
corrections Extra steps:
Boresight calibration Atmospheric correction
(Level 2) Geocorrection (Level 3)
Level 0 raw data
Level 3 geocorrected data (1 band)

Hyperspectral data processing
Level 0 (raw) to level 1b GPS navigation Radiometric correction Formatting +
transformations Timing + positioning
corrections Extra steps:
Boresight calibration Atmospheric correction
(Level 2) Geocorrection (Level 3)
Little Rissington boresight calibration site + markup

LIDAR data processing
Raw data to point cloud Navigation Formatting Positioning corrections
DEMs for hyperspectral filled with ASTER,
NextMAP, etc Full waveform RCD (digital camera)
LIDAR intensity mosaic
Raw data points and scans

LIDAR data processing
Raw data to point cloud Navigation Formatting Positioning corrections
DEMs for hyperspectral filled with ASTER,
NextMAP, etc Full waveform RCD (digital camera)
Full waveform concept
Little Rissington DEM in relief (height differences exaggerated for display)
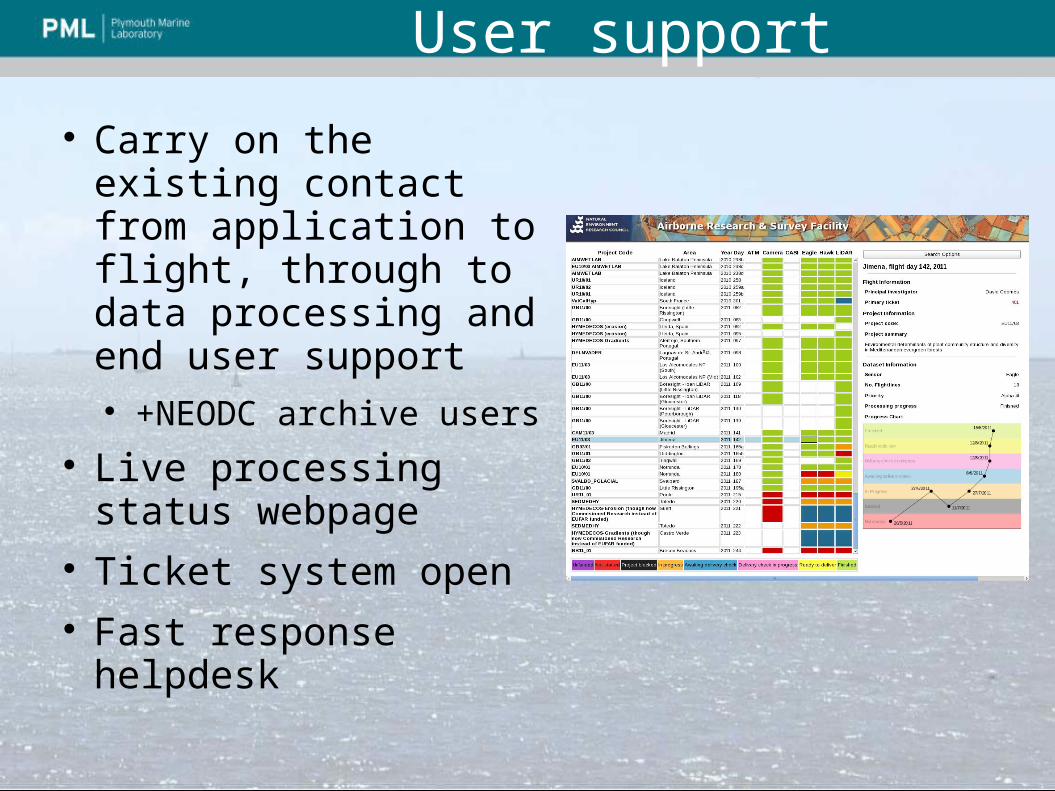
User support
Carry on the existing contact from application to flight, through to data processing and end user support +NEODC archive users
Live processing status webpage
Ticket system open Fast response helpdesk

Analysis
Radiometric calibration ARSF conduct own
calibration with FSF Identified and
corrected two serious radiometric issues
Issue analysis and correction Specim frame timing LIDAR roll errors Software bugs!
Eagle CCD response in calibration
Frame-shift smear estimated error

Analysis
Radiometric calibration ARSF conduct own
calibration with FSF Identified and
corrected two serious radiometric issues
Issue analysis and correction Specim frame timing LIDAR roll errors Software bugs! Specim frame timing errors
(top: 0.03s error; bottom: corrected)

Development
APL LIDAR processor FastQC + LIDAR
viewers FW LIDAR extractions
Higher order descriptors International interaction
libLAS/LASTools EUFAR HYQUAPRO
Cumbria floods (2009)
Ethiopia LIDAR (2008)

Development
APL LIDAR processor FastQC + LIDAR
viewers FW LIDAR extractions
Higher order descriptors International interaction
libLAS/LASTools EUFAR HYQUAPRO
New Forest full waveform trial (2010)

Development
APL LIDAR processor FastQC + LIDAR
viewers FW LIDAR extractions
Higher order descriptors International interaction
libLAS/LASTools EUFAR HYQUAPRO
New Forest full waveform trial (2010)

Future
Improved systems Further automation Atmospheric
correction Greater integration of
sensors Unified data
New sensors?

Data processing turned around since 2007/8 Part of the improvements of the service in
collaboration with ARSF-Ops Data processing team can draw on a pool of
expertise and capacity at no extra cost Many complex instrument and science issues
addressed Providing significant extra value beyond
simple processing Calibration, analysis, development, international
interaction
Summary

Questions?

Google Earth visualisation

New Forest mosaic

LIDAR DEM
Little Rissington DEM in relief (height differences significantly exaggerated for display)

LIDAR scanner

Specim timing

Straylight

Navsync system diagram





























