Embed Size (px)
Citation preview

MinixVM: An Implementation of Virtual Memory in Minix 3
Carter Weatherly
710 Masters Project
The College of William & Mary
Submitted to the Department of Computer Science
of the College of William & Mary
in partial fulfillment of the requirements for the degree of
Masters of Science
April 24, 2009

Abstract
Minix 3 is the evolutionary development of Andrew Tanenbaum’s original Minix mi-
crokernel. While the purpose of Minix 1 was to serve as an educational tool for teaching
operating systems, the expressed purpose of Minix 3 is to provide a reliable, general-
purpose operating system based on the microkernel architecture [3]. Because of its
heritage, Minix 3 lacks many capabilities considered necessary for a modern, general-
purpose operating system. One such major deficiency is the lack of a virtual memory
implementation. Virtualizing memory is one of the most fundamental abstractions pro-
vided by a modern operating system. Without virtual memory, Minix 3 cannot transpar-
ently allocate more than the amount of physical memory, share discrete units of memory
between address spaces, or map files into memory. This report presents MinixVM, a mod-
ification of the Minix 3.1.3a source to include virtual memory, and discusses the issues
involved in integrating virtual memory into the microkernel architecture.
2

Contents
1 Introduction 7
2 Minix 3 Design 9
2.1 Microkernel Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.1 Advantages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.1.2 Disadvantages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Minix 3 Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Minix 3 Messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.2 Minix 3 Image . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3 Memory Management . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1 Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.2 Executable Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.3 Swapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 MinixVM Design 20
3.1 Actors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2 Pager Server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.2.1 Pager Server Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2.2 Pager Server Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.2.3 Pager Server Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 MinixVM Operations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.1 Pager Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3.2 Exec Notification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.3.3 Page Fault Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 MinixVM Implementation 30
4.1 Architectural Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.1 Memory Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.2 Hardware Data Structures . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.1.3 Address Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3

4.1.4 Page Fault Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2 Modification Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.1 Kernel Modifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.2 PM Modifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.2.3 VFS Modifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.3 New Server Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3.1 New Kernel Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.3.2 New PM Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.3.3 New VFS Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.4 Pager Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Performance Analysis 43
5.1 General Program Runtime Tests . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Sequential Scan Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Future Work 47
6.1 Removing Segmentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.2 System Server Reloading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.3 VM Extensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6.3.1 Page Swapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.3.2 Copy-On-Write Page Sharing . . . . . . . . . . . . . . . . . . . . . . . . 49
6.3.3 mmap() . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
6.3.4 Dynamic Linking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7 Conclusion 51
8 References 52
9 Appendix: MinixVM Patch Summary 53
4

List of Figures
1 Minix 3 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2 Minix 3 Boot Image Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Minix 3 Boot Image Layout, with Pager . . . . . . . . . . . . . . . . . . . . . . 22
4 Pager Initialization Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5 Exec Notification Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6 Page Fault Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7 Segmented Address Translation . . . . . . . . . . . . . . . . . . . . . . . . . . 31
8 Paged Address Translation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
9 General Program Runtime . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
10 Scan Performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5

List of Tables
1 New Kernel Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2 New PM Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3 New VFS Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4 Pager Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6

1 Introduction
The world of operating systems is dominated by a single design. The monolithic kernel —
where all of the operating system services are contained in a single binary running at the
highest hardware-enforced privilege level — underpins most modern operating systems. This
approach was a natural extension of the pre-operating system days where application pro-
grams interacted directly with the hardware (treating the operating system effectively as a
“library” through which hardware resources are accessed). However, the monolithic design
is not the only one available to operating system developers.
The microkernel architecture was originally conceived as a notion to simplify operating
systems, which had become more and more complex as the capabilities of the hardware they
controlled increased. The fundamental idea was to move as much code out of the kernel as
possible, placing it in clearly delineated “servers” that run at a less privileged level than the
kernel.
Minix 3 employs the microkernel architecture, and is the focus of this report. While Minix
3 purports to be a general-purpose operating system, it lacks many of the operating system
primitives that developers have come to expect from modern operating systems. In particular,
Minix 3 lacks a virtual memory (VM) implementation. This report presents MinixVM, a design
and prototype implementation of VM in Minix 3.
The majority of this report is dedicated to the design and implementation of MinixVM;
however, the ultimate goal of this report is to explore the difficulties of programming a mi-
crokernel within the context of MinixVM. As such, much of the presentation of MinixVM is
interspersed with discussions on the microkernel architecture and how it sometimes forces
awkward design and implementation decisions.
The remainder of this report follows this organization:
• Section 2: Minix 3 Design
Presents a generic overview of the microkernel architecture; the design of Minix 3
as it relates to the design and implementation of MinixVM; and discusses some of
7

the advantages and disadvantages of the microkernel architecture.
• Section 3: MinixVM Design
Describes the design of MinixVM, and how this design is shaped by the underlying
design of Minix 3; describes the new system server, pager; and outlines the major
operations that MinixVM must support.
• Section 4: MinixVM Implementation
Describes the hardware architectural support for virtual memory; provides a sum-
mary of the material modifications made to existing Minix 3 components to im-
plement MinixVM; and lists the new messages added to support MinixVM.
• Section 5: Performance Analysis
Contains a brief performance analysis of the MinixVM implementation, focused on
the overhead required to handle page faults.
• Section 6: Future Work
Lists the items from the MinixVM design that are not complete in the MinixVM
implementation and suggests extensions to the MinixVM design.
• Section 7: Conclusion
Concludes the report, including a commentary on the viability of MinixVM and
microkernels in general.
Also included is an Appendix, which summarizes the changes made to the Minix 3.1.3a
source.
8

2 Minix 3 Design
This section describes the design of microkernels, the relevant portions of Minix 3 design,
and how the design of the operating system imposes limitations on the implementation.
2.1 Microkernel Architecture
A monolithic kernel is frequently referred to as being “vertical stacked” in that it places layer
upon layer of abstraction on the hardware in its creation of operating system services. A
microkernel, on the other hand, is called “horizontally stacked” in that it provides the same
services as a monolithic kernel, except that the majority of these services exist in userspace
as multiple interdependent binaries.
Like a monolithic kernel, a microkernel includes a binary that runs at the highest privilege
level, but this binary is designed to be as small as possible. Typically the “kernel” of a micro-
kernel only contains the architecture-specific code necessary to boot the system and interact
with the hardware, essential hardware drivers (e.g. the programmable interrupt controller or
clock driver), minimal scheduling primitives, and an efficient mechanism that the remaining
microkernel components use to communicate with each other (typically inter-process com-
munication or IPC). The remainder of the services typically provided by an operating system
are supplied by various “servers” which run in userspace. The level of access that these
servers are given to hardware is determined by their function (this necessarily creates a set
of trusted “system servers” without which the system would be effectively non-functional).
2.1.1 Advantages
The following is a list of the main advantages of the microkernel architecture over other
operating system architectures. Where relevant, examples from Minix 3 are provided.
• Functional Separation
From a pure design perspective, microkernels provide a perfect component-based
architecture, where each component has independent and clearly-defined func-
9

tional responsibilities. This should simplify systems development and mainte-
nance, much like the usage of shared libraries does for application development.
• Service Isolation
In a monolithic kernel, all operating systems services operate in the same address
space. If there is an error in any of this code, it could potentially corrupt the
address space of the kernel and halt the system unexpectedly. In a microkernel,
such a fault would be isolated to the offending userspace process.
• Fault Tolerance
Since operating system services are both isolated and component-based in the mi-
crokernel architecture, they lend themselves naturally to the mechanisms of fault
tolerance from distributed systems research. In fact, Minix 3 includes in its set of
system services a “Reincarnation Server” which will restart a service if ceases to
receive status notifications, making the protected components fault tolerant [2]. If
this could be extended to the entire operating system (it cannot, see Section 2.1.2)
then Minix 3 would be fault tolerant.
• Trusted Computing
The microkernel architecture provides an enticing target for creating a trusted op-
erating system, since current methods still rely heavily upon source code auditing
and the core components of microkernels are small. Also, the isolation of sys-
tem services to userspace limits the amount of damage an exploited service could
cause.
2.1.2 Disadvantages
The following is a list of the main disadvantages of the microkernel architecture over other
operating system architectures. Where relevant, examples from Minix 3 are provided.
10

• Operating System Development
The primary disadvantage of the microkernel architecture is that, in its attempt
to make it more difficult to propagate faults and define clear functional bound-
aries, it also complicates programming operating system functionality. Even the
most straightforward concepts require drastically different (and significantly more
complex) implementation than in a monolithic kernel. This is especially true with
VM and will become more apparent in Section 3. This complexity in design also
directly leads to difficulty in testing and debugging, effectively compounding the
typical problems in developing an operating system with the difficulties involved
in developing a distributed system. These issues, as well as the ready availability
of operating systems based upon monolithic kernels have been largest barrier to
microkernel adoption.
• Functional Coupling
The microkernel architecture is ideally composed of loosely-coupled communi-
cating components, but in practice this ideal is one of the first sacrificed when
attempting to provide service implementations. This is clearly evident in Minix 3,
where there is a hierarchy of “trusted” servers, or system servers (e.g. the process
manager and virtual file system manager). Without the set of system servers, the
operating system would not function. It is true that the components could be re-
placed (as is expected when the functionality has been abstracted), but only if the
replacement components make the same assumptions about the processing of data
— in a real system like Minix 3, components share data outside of their clearly de-
fined APIs (e.g. the data copying necessary for true message handling described
in Section 2.2.1). This extra-API processing prevents true functional separation in
Minix 3 (likely, in any full-featured microkernel).
• Data Fracturing and Coupling
Each service may need to manipulate the same abstraction in different ways. Data
11

copying between servers is relatively expensive, so in order to avoid that, micro-
kernels tend to structure such “shared” data in a fashion similar to a relational
database. All servers agree upon an identifier for the abstraction and link that
with their own set of relevant data. This makes it difficult to manage these data
structures, introduces data coupling between the servers, and adds further com-
munications overhead to synchronize these data structures. An example of this in
Minix 3 is the process: the kernel, PM, and VFS all maintain their own set of data
relevant to their processing for each process in the system.
• IPC Overhead
There have been claims, and indeed early evidence suggested, that microkernels
suffer from inherent performance deficiencies compared to monolithic kernels,
given the IPC overhead and the frequent kernel/user mode switches. These claims
have largely been refuted by [6]; however, it is true that microkernels will al-
ways incur more overhead in offering services than monolithic kernels (due to the
IPC). In the case of Minix 3 in particular, the server IPC mechanism simplifications
(described in Section 2.2.1) ease the creation of system servers (all internal oper-
ations are guaranteed atomic); however, it comes with a decrease in performance.
System servers are the brokers of shared resources, which means that multiplexing
the access to these resources is impossible. There are, however, ways around these
limitations, as will be discussed in Section 3.
• Fault Tolerance Myth
It seems as if the microkernel architecture would provide fault tolerance in the
way that distributed systems do, but in practice, this is very difficult to achieve
in the general case. In fact, in Minix 3, this goal is only partially achievable. If a
system server were to crash, it could theoretically be restarted; however, the new
instance would lack all of the state information of the previous instance. Without
this data, the system would cease to function (e.g. imagine having the process
12

table deleted from a running monolithic kernel). The alternative would be to treat
each operation on a critical system server as a transaction, mirroring the data in
a separate server (either as a data store or warm failover component). This has
the disadvantage of (likely significantly) decreasing performance, and not actually
solving the issue — it would turn a single system server failure to whole system
failure into a double order failure (system server and transactional backing store
failure). Because of these issues, Minix 3 only attempts to “reincarnate” device
driver servers [2]. While device drivers account for the majority of system crashes
in some modern operating systems [1], this partial implementation does not make
Minix 3 a true fault tolerant operating system.
• Reverse Dependencies
A reverse dependency, in the context of the microkernel architecture, occurs when
the kernel depends upon a userspace component to complete the processing of
a kernel-level operation. One such generic example would arise if the process
scheduler were implemented in a userspace server. While the mechanisms to per-
form the scheduling exist in the kernel, if the kernel needed to run the scheduler,
it would have to reach out to the userspace scheduler. This is a particularly in-
sidious form of functional coupling, which may not be entirely unavoidable in
the microkernel architecture (see Section 6.1 for a concrete example applicable to
MinixVM).
2.2 Minix 3 Components
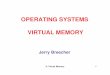
Minix 3 roughly follows the typical microkernel design described in Section 2.1. Figure 1
illustrates the layout of Minix 3 (image taken from [2]).
13

Figure 1: Minix 3 Architecture
Of the components listed, the following are directly relevant to the design and implemen-
tation of MinixVM (much more detail will be given in Section 3 and Section 4).
• Microkernel
The microkernel is the only component of Minix 3 that runs in kernel mode (clear
from Figure 1). It manages the interrupt vectors and exception handlers and so
will be the first component in MinixVM to begin handling page faults. This portion
of Minix 3 will be referred to as the “kernel” since it is the only code run in kernel
mode. It is important to note that the kernel cannot dynamically allocate memory
(memory allocation is controlled by the process manager).
• Process Manager
The process manager, or PM, controls all aspects of a process in Minix 3, except
for the actual scheduling or low-level management (all of which is in the ker-
nel). All memory management in Minix 3 is controlled by PM (see Section 2.3 for
why). Since almost all process-related messaging routes through PM, it is central
to MinixVM.
14

• File Server
The file server is typically a collection of at least two services: the virtual file
system service (VFS) and the file system driver service. Almost all I/O operations
route through VFS, and it is this service that MinixVM must interact with in order
to perform its I/O requests (e.g. reading a page from disk into memory).
2.2.1 Minix 3 Messaging
The Minix 3 processes communicate through the Minix 3 IPC, or messaging system. The
messaging system resides in the kernel, since it needs to be able to access arbitrary memory
(copy the message contents from one address space to another). This system supports send-
ing fixed length messages to any process equipped to receive messages (processes must block
on a receive() in almost all cases for this condition to be true). Using fixed-length messages
simplifies the messaging mechanism, since the kernel need not allocate arbitrary memory to
deliver messages. As a further simplification, a receiver may process only one message at
a time (queue size one). If a process attempts to send a message to another process which
is handling a message already, the sender will block. With the fixed-length messages and
queues, the messaging mechanism implements the simplest form of reliable message deliv-
ery; however, it does so at the cost of decreased messaging throughput and server utilization.
Minix 3 works around the data-size limitation by sending pointers to larger data structures in
the message and having the receiver use the kernel to copy the memory to its address space.
Processes that may receive messages (almost all) are identified by message endpoint num-
bers that the kernel assigns to each process. These are guaranteed to be unique — in Minix
3, the kernel simply adds a constant to the process ID to generate this number, except with
the system servers where these endpoints are fixed. The endpoint number is required in all
message sending API functions.
There are three types of message sending semantics in Minix 3, listed here by the API
function call used to send a message using the specified semantics. There is only one way
for process to receive a message: by calling the receive() API function and blocking until
15

message receipt (the so-called stop-and-wait semantics). Receiving processes may specify
which processes are allowed to send messages to them by a parameter in the receive() call.
• send()
Most messages in Minix 3 are sent using the send() API call, as it minimizes mes-
saging overhead while still allowing for the delivery of data in the message. The
send() API call is synchronous. This means that the sender will block until the
kernel copies the message data from the sender’s address space to the receiver’s ad-
dress space. If the receiver is not currently blocked on a receive() call, the sender
will block until the receiver completes its processing and calls receive() again.
• sendrec()
When processing requires a remote resource respond to a request to complete,
sendrec() is used. The semantics of sendrec() are the same as traditional RPC
— the process blocks while a remote resource processes a request, which looks like
a regular function call in the original process, until the results of the operation are
known to the original process. Using sendrec() incurs the most messaging over-
head of all the sending methods; however, there are some circumstances where
these semantics are required. Again, most Minix 3 communications are designed
to use send() to avoid this overhead.
• notify()
The only true asynchronous messaging mechanism in Minix 3, notify() is used
rarely since it carries no payload. In terms if implementation, a notify() to a
process merely sets a bit (depending upon the type of notification) in a bitmap
contained in the process metadata. Including notify() in the messaging API is
necessary for passing asynchronous events from the kernel to userspace (hardware
interrupts and signals).
16

2.2.2 Minix 3 Image
As mentioned in Section 2.1, the microkernel design necessarily creates a hierarchy of servers
offering system services. There are certain servers without which Minix 3 would not function.
These services form the “system servers,” a set of trusted (in that they have access to certain
hardware resources) servers. Since the system servers are necessary for proper functioning,
they are compiled into the image that is loaded by the boot monitor, which contains the
kernel. (Note that while this deviates from the ideal of having a “bootstrap server” load
required services, the microkernel architecture is maintained since the system servers may be
replaced at compile-time.)
Figure 2 shows the typical output of a Minix 3 image, describing the layout of the micro-
kernel and system servers in the boot image (‘kernel’ is the microkernel and the remaining
components are the system servers).
text data bss size
29968 5516 54036 89520 ../kernel/kernel
27376 7612 83832 118820 ../servers/pm/pm
48672 11792 105148 165612 ../servers/vfs/vfs
21488 7448 47504 76440 ../servers/rs/rs
32560 8012 16180 56752 ../servers/ds/ds
30368 7748 111516 149632 ../drivers/tty/tty
11120 535368 16908 563396 ../drivers/memory/memory
9792 2268 68936 80996 ../drivers/log/log
31792 5832 4990632 5028256 ../servers/mfs/mfs
7008 2440 1356 10804 ../servers/init/init
------ ------ ------ -------
250144 594036 5496048 6340228 total
Figure 2: Minix 3 Boot Image Layout
The Minix 3 quirk of adding the system servers to the boot image becomes important
when deciding what will be paged and when paging will be activated. This will be described
more fully in Section 3.2.
17

2.3 Memory Management
2.3.1 Allocation
Minix 3 abstracts both the processor and memory using the same construct: the process.
Most modern operating systems use the process to abstract the CPU, for scheduling purposes,
but use some other finer-grained construct for abstracting memory. The reason for this that
while whole-process memory allocation (where a process is given all of the memory needed
to run during execution) simplifies the allocation process (one need only to find a large
enough chunk of contiguous physical memory) it complicates the efficient use of memory.
Whole-process memory allocation necessarily leads to internal fragmentation of memory,
since processes rarely use their entire memory allocation, and also will eventually lead to
external fragmentation of free memory “holes” that are difficult to allocate (an example of
the NP-complete problem of online bin packing).
Minix 3 does attempt to prevent wasted memory through duplication of read-only code
sections by only loading the text section of a binary into memory once per program, sharing
that memory region amongst the multiple program copies. However, it does suffer from the
aforementioned problems of internal and external fragmentation.
2.3.2 Executable Layout
To simplify loading, and due to the lack of VM support, Minix 3 executables must statically
declare required memory resources at compile time (in the Minix-native a.out header). This
constraint imposes a significant limitation upon dynamic memory allocation and runtime
stack size, as they must compete for statically allocated memory. Miscalculating resources in
this design must therefore result in either a processes being killed due to memory exhaustion
or significant internal fragmentation (memory allocated that is rarely used). This design also
makes porting existing programs to Minix 3 difficult, since most modern applications assume
a nearly limitless supply of memory (presuppose the presence of VM).
18

2.3.3 Swapping
Minix 3 has limited support for swapping out processes to disk in order to alleviate memory
pressure. This support is limited by the coarse allocation of memory in process-sized chunks.
In order to swap any part of a process, the entire process must be swapped. This approach
presents a very narrow window in which a system under significant memory pressure may
remain operational before thrashing, since the disk I/O required to read/write an entire
process would consume the majority of context-switch time.
19

3 MinixVM Design
The fundamental difference between Minix 3 and MinixVM is in the definition of the mem-
ory object. In Minix 3, memory objects are allocated to processes, in the size required by
the process. In MinixVM, memory is allocated in context-independent, but process-related
discrete pages. This further abstraction of memory demands further complexity in memory
management, but also provides a disproportionate amount of flexibility in this management.
This section will discuss the design of MinixVM, presenting the pager server and the
operations that must be implemented to support MinixVM.
3.1 Actors
In a VM implementation, there are typically five actors: the hardware, page fault handler,
page allocator, process manager, and file system interface. The page fault handler is the
routine called by the hardware when it detects a page fault; the page allocator is the logic
that determines which page to allocate to the faulting process; the process manager coalesces
the memory management information with the process; and the file system interface is used
to read data in from disk, as in demand paging executables.
Most of these roles can be supported by modifying pre-existing Minix 3 components. The
page fault handler can replace the default action in the kernel; the process manager (PM)
can be modified to support routing page fault-related messages, and VFS can be modified to
read executables on page fault. However, to fully support this design, a new system server is
required: pager.
3.2 Pager Server
The pager server has simple and clearly-defined responsibilities: it manages the address
spaces for all paged processes and determines whether or not a page fault represents a valid
memory access for a given process. Note that pager must assume the role of memory manager
since it must manipulate the physical address space directly.
20
3.2.1 Pager Server Data
In order to manage memory and handle page faults, pager requires a number of data struc-
tures.
• Process Metadata
There is certain information, such as the process ID and endpoint number, that
pager must know in order to be able to associate messages about processes with
its own data structures. This means that pager joins the set of kernel, PM, and
VFS, by containing its own data on running processes. This also means that pager
must be notified whenever a process is created (see Section 3.3.2).
• Hardware Page Tables
The hardware page tables are the data structures that are read directly by the
MMU hardware on each memory access when paged mode is activated (see Section 4.1
for the architectural details). The inclusion of the hardware page tables in a
userspace program is necessary since the kernel cannot do dynamic memory allo-
cation, and is a good example of the awkwardness imposed upon the design by
the microkernel architecture. Fortunately, the kernel can read from all physical
memory – it need only be told where the base address of the hardware page table
is located (see Section 3.3.2 for how this is done).
• Supplemental Page Tables
The hardware page tables only constitute the pages allocated to the respective
process that are currently loaded into memory. There are cases where pages may
be allocated but not in memory, such as when a page is swapped out to disk.
Pager must maintain this supplemental information in order to accurately manage
memory and determine whether or not a memory access is valid.
21
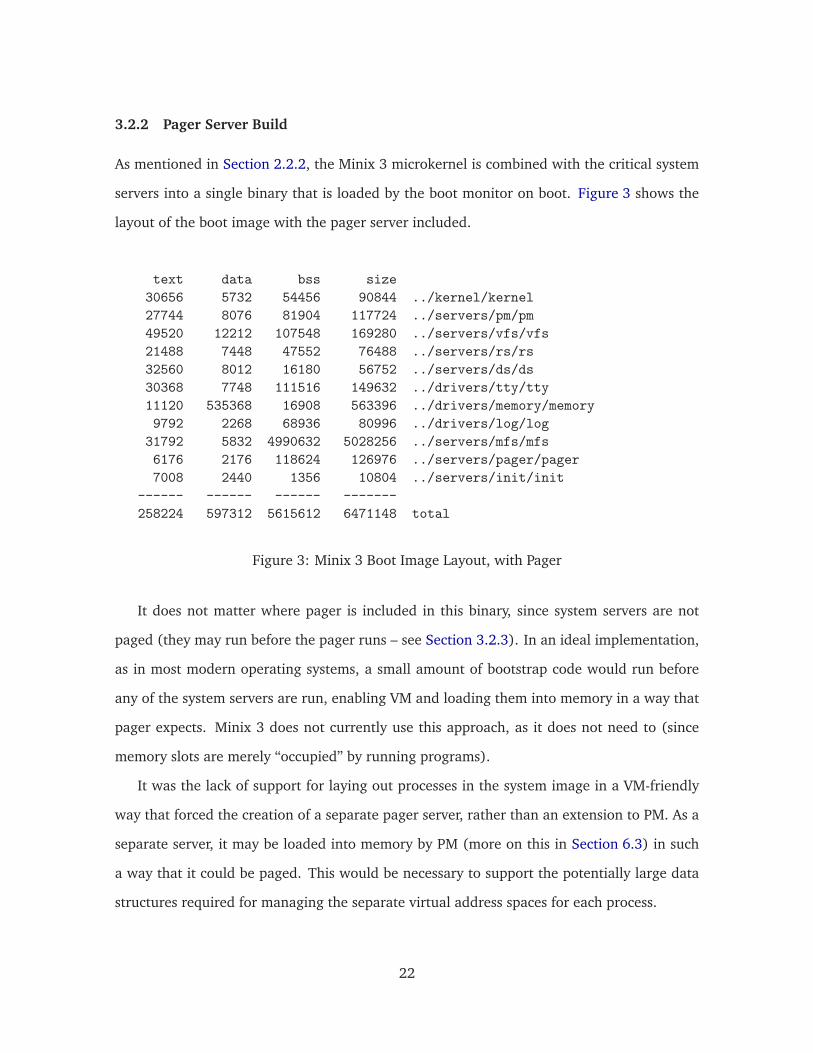
3.2.2 Pager Server Build
As mentioned in Section 2.2.2, the Minix 3 microkernel is combined with the critical system
servers into a single binary that is loaded by the boot monitor on boot. Figure 3 shows the
layout of the boot image with the pager server included.
text data bss size
30656 5732 54456 90844 ../kernel/kernel
27744 8076 81904 117724 ../servers/pm/pm
49520 12212 107548 169280 ../servers/vfs/vfs
21488 7448 47552 76488 ../servers/rs/rs
32560 8012 16180 56752 ../servers/ds/ds
30368 7748 111516 149632 ../drivers/tty/tty
11120 535368 16908 563396 ../drivers/memory/memory
9792 2268 68936 80996 ../drivers/log/log
31792 5832 4990632 5028256 ../servers/mfs/mfs
6176 2176 118624 126976 ../servers/pager/pager
7008 2440 1356 10804 ../servers/init/init
------ ------ ------ -------
258224 597312 5615612 6471148 total
Figure 3: Minix 3 Boot Image Layout, with Pager
It does not matter where pager is included in this binary, since system servers are not
paged (they may run before the pager runs – see Section 3.2.3). In an ideal implementation,
as in most modern operating systems, a small amount of bootstrap code would run before
any of the system servers are run, enabling VM and loading them into memory in a way that
pager expects. Minix 3 does not currently use this approach, as it does not need to (since
memory slots are merely “occupied” by running programs).
It was the lack of support for laying out processes in the system image in a VM-friendly
way that forced the creation of a separate pager server, rather than an extension to PM. As a
separate server, it may be loaded into memory by PM (more on this in Section 6.3) in such
a way that it could be paged. This would be necessary to support the potentially large data
structures required for managing the separate virtual address spaces for each process.
22
3.2.3 Pager Server Limitations
The pager server has several limitations imposed upon it, mostly due to the underlying design
of Minix 3.
• Certain processes cannot be paged
Pager supports paged operation of all processes not including the system servers.
This is a consequence of how system servers are loaded (as a bulk image, by the
boot monitor) and the fact that pager does not run before the other system servers
do (see Section 6.2 for a general solution to this problem).
• Limited heap space
As mentioned in Section 3.2.2, since pager is a system server, it has the same
limitation of sharing its heap space and stack space from a statically, compile-time
allocated space.
3.3 MinixVM Operations
This section describes the control flow of the major operations that MinixVM must support:
pager initialization, exec notifications, and page fault handling. Since a microkernel is a
collection of loosely coupled functional components, these interactions will be presented as
a sequence of messages. In some cases these are function calls, but in most cases, they are
Minix 3 messages; the latter cases will be noted.
3.3.1 Pager Initialization
Pager initialization is both the most infrequent operation required by MinixVM (once at boot)
and the operation requiring the most change to Minix 3 (see Section 4.2.2 for implementation
details).
More detail on the messages can be found in Section 4.3.
23
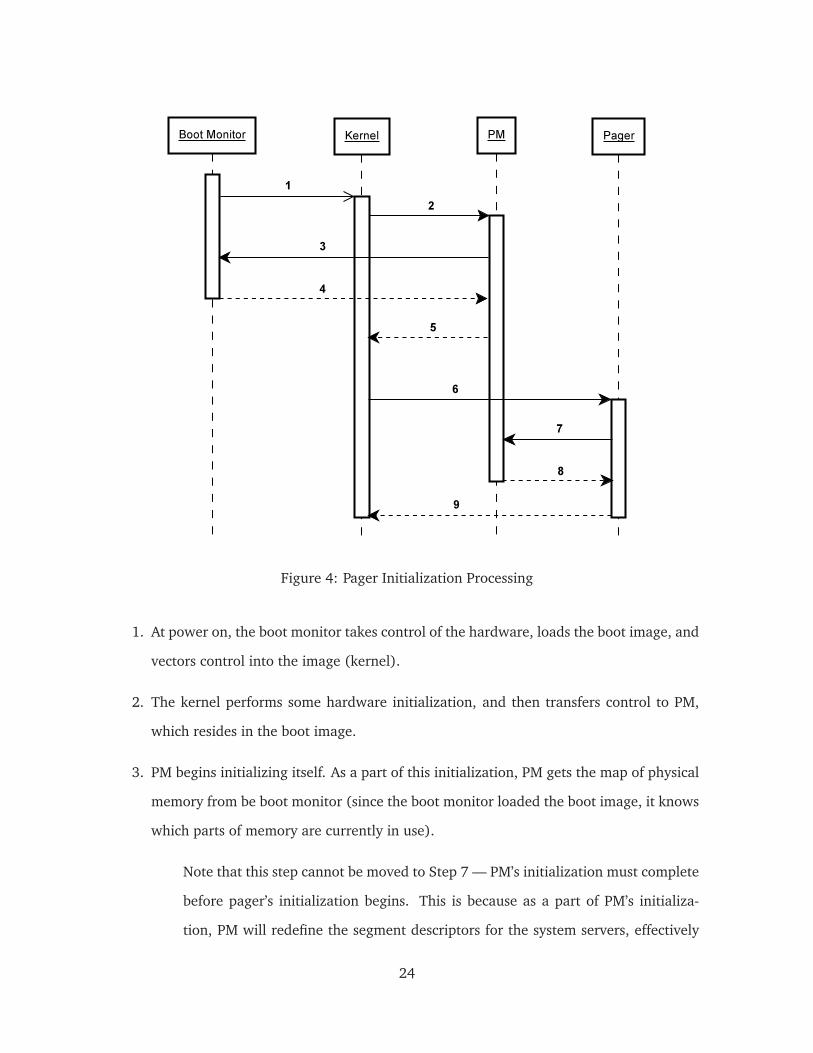
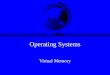
Figure 4: Pager Initialization Processing
1. At power on, the boot monitor takes control of the hardware, loads the boot image, and
vectors control into the image (kernel).
2. The kernel performs some hardware initialization, and then transfers control to PM,
which resides in the boot image.
3. PM begins initializing itself. As a part of this initialization, PM gets the map of physical
memory from be boot monitor (since the boot monitor loaded the boot image, it knows
which parts of memory are currently in use).
Note that this step cannot be moved to Step 7 — PM’s initialization must complete
before pager’s initialization begins. This is because as a part of PM’s initializa-
tion, PM will redefine the segment descriptors for the system servers, effectively
24

changing the memory layout in such a way that it will not agree with the map
contained by the boot monitor. Pager cannot simply query the boot monitor when
it initializes.
4. The boot monitor responds with the physical memory map.
5. PM returns control to the kernel, since its initialization is complete.
6. Some time later (after allowing other system servers to initialize themselves), the kernel
transfers control to pager’s initialization code.
7. As a part of pager’s initialization, it will read the updated memory map from PM (so
that pager can initialize its memory management). This is done by sending PM a
PM PAGER INIT message.
8. PM responds to pager with the memory map.
9. Pager returns control back to the kernel, now that it is done initializing. If no more
system servers remain to be initialized, the kernel starts init.
3.3.2 Exec Notification
The following figure shows the message sequence required to implement the exec notification
scheme in MinixVM. The exec notification is required so that pager knows to set up its process
image once a new process is created. Note that the two other actors who must update their
process images, the kernel and VFS, are notified with the SYS EXEC and PM EXEC messages,
respectively.
Also note that a corresponding exit notification is not necessary. PM will send the mes-
sages to free the allocated memory once it receives the exit notification, and the old page
data will simply be overwritten once pager receives another exec notification for the same
process ID (this assumes PM is properly managing processes).
More detail on the messages can be found in Section 4.3.
25

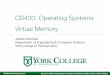
Figure 5: Exec Notification Processing
1. The user initiates an exec() by sending a message to PM (though a library-wrapped
exec() call). This is a blocking call since the requesting process cannot continue until
the exec is complete.
2. PM sends a PAGER EXEC message to pager, to notify pager of the new process creation.
This is a blocking call because PM needs the page directory base address from pager
before continuing.
3. Pager responds to PM with the page directory base register of the new process.
The response from the exec notification is also a convenient place to pass the page
directory base address (see Section 4.1), to the kernel, since PM must already
communicate with the kernel to finish the exec.
4. PM sends a SYS EXEC message to the kernel (through the sys exec() system call) to
complete the exec. This call must be blocking since Step 1 was a blocking call (PM must
synchronously respond to the requesting process).
5. The kernel responds with the exec status.
26

6. PM passes the exec status to the requesting process.
Note that only Steps 2 and 3 are new in MinixVM (the remainder were included either
for completeness or because they were modified).
3.3.3 Page Fault Handling
The following figure shows the message sequence required to handle a page fault in MinixVM
(only the go-path is shown). Page fault handing is at the core of the MinixVM implementation
and is the most complicated new operation that it supports.
More detail on the messages can be found in Section 4.3.
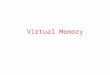
Figure 6: Page Fault Processing
1. The hardware senses a page fault exception and vectors control into the location speci-
fied by the kernel at boot (the page fault handler).
27

2. Kernel sends non-blocking notification (HARD INT message) to PM.
This is implemented by sending PM a HARD INT (hardware interrupt) message,
since it is the only available asynchronous messaging mechanism the kernel may
use to contact PM.
3. PM processes the page fault notification from Step 2 and sends a SYS PAGEFAULT mes-
sage to the kernel to get the page fault details. PM blocks until it receives a response.
4. Kernel replies to PM with the page fault details.
5. PM sends a PAGER PGFCHECK message to pager, to check the validity of the page fault.
PM will block until pager receives the message (it will not wait for pager to fully process
the message – see Section 2.2.1).
6. Pager sends PM a PM PGFCHECK REPLY message with the results of the validity check. If
the result is negative, PM will report a bad page fault to the kernel.
7. PM sends a PM PGFAULT message to VFS, requesting that it read the page from disk into
memory. PM will block until VFS receives the message.
8. VFS sends a PM PGFAULT REPLY message to VFS, including the response status.
9. PM sends a PAGER PGFDONE message to pager, to let it know the status of the page fault
processing.
This is required since pager would have know way of knowing whether or not Step
7 failed. If there is a failure after its last communication with PM, page tables and
the like could become corrupted (e.g. list an entry that does not exist).
10. PM sends a SYS PAGEFAULT message to the kernel, with the status of the page fault
processing.
Note that in this design, the send() semantics were used as often as possible (Steps 5,
6, 7, 8, 9), since this maximizes the throughput without overly complicating the message
passing sequence (see Section 2.2.1 for the details on send() semantics).
28

There is one case where the asynchronous notification mechanism must be used. In
Step 2, where the kernel first communicates the page fault to PM. Since this notification is
sent from the page fault handler, it is executed in interrupt context. This means that no
progress will be made on the CPU until the handler terminates. Using notify() is the fastest
mechanism Minix 3 offers to the kernel to communicate with PM.
29

4 MinixVM Implementation
This section describes the implementation of MinixVM, following the design listed in Section 3.
4.1 Architectural Support
Virtual memory is something that necessarily requires support from hardware to be feasi-
ble from a performance perspective, given that the address translation must occur on every
memory access. Minix 3 only supports the Intel IA-32 architecture — this section provides a
brief overview of what the operating system must do in order to use the hardware memory
management support in the IA-32 architecture.
The information from this section was taken largely from Intel’s comprehensive system
programming guides ([4, 5]).
4.1.1 Memory Modes
When an IA-32 machine first boots, it is in so-called “real-mode,” where memory addresses
correspond directly to the physical addresses, in a limited 16-bit wide address space. To take
advantage of the full 32-bit address space, and to provide protection of one chunk of code
from another, IA-32 provides a “protected-mode.” Protected-mode is entered soon after boot
in Minix 3. Once in protected-mode all code segments must be given segment descriptors,
which are later used for address translation and privilege checks, in hardware.
4.1.2 Hardware Data Structures
The following special purpose registers are important to the MinixVM implementation:
• CR0 – Paging is enabled when bit 31 of this register is set.
• CR2 – Upon receiving a page fault exception, the hardware will fill this register with the
faulting linear address.
30
• CR3 – This register contains the address for the base of the hardware page tables and
must be changed on each process context switch.
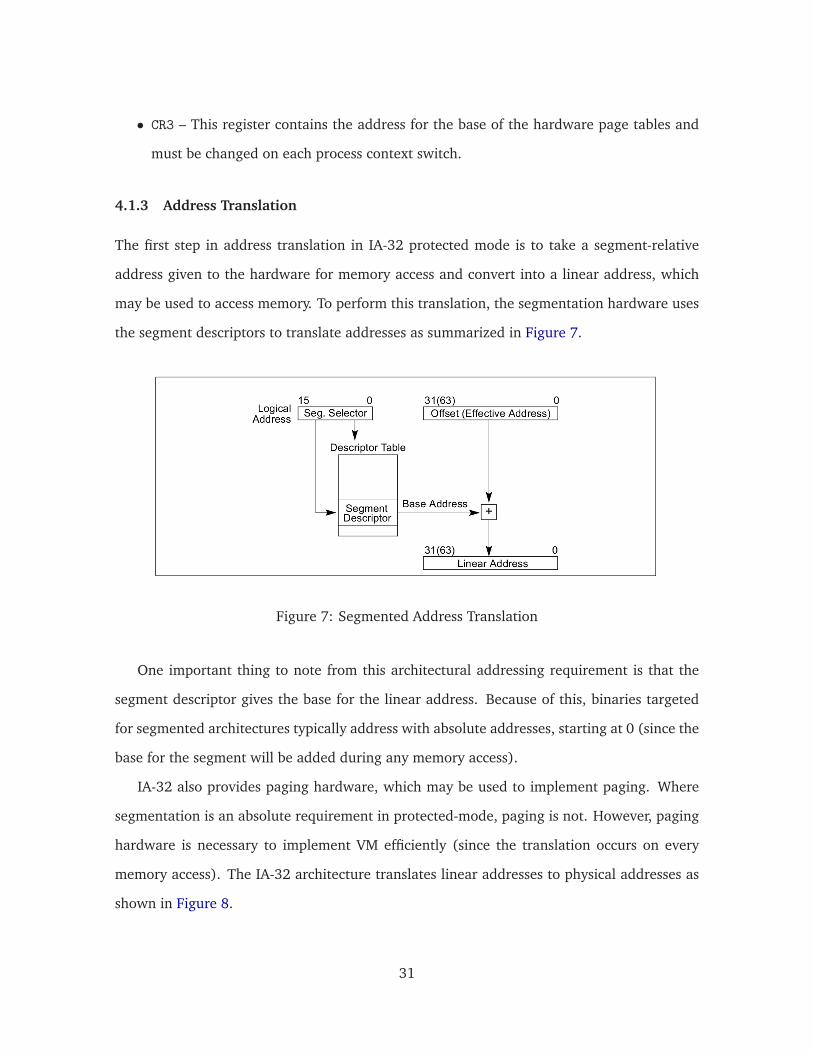
4.1.3 Address Translation
The first step in address translation in IA-32 protected mode is to take a segment-relative
address given to the hardware for memory access and convert into a linear address, which
may be used to access memory. To perform this translation, the segmentation hardware uses
the segment descriptors to translate addresses as summarized in Figure 7.
Figure 7: Segmented Address Translation
One important thing to note from this architectural addressing requirement is that the
segment descriptor gives the base for the linear address. Because of this, binaries targeted
for segmented architectures typically address with absolute addresses, starting at 0 (since the
base for the segment will be added during any memory access).
IA-32 also provides paging hardware, which may be used to implement paging. Where
segmentation is an absolute requirement in protected-mode, paging is not. However, paging
hardware is necessary to implement VM efficiently (since the translation occurs on every
memory access). The IA-32 architecture translates linear addresses to physical addresses as
shown in Figure 8.
31
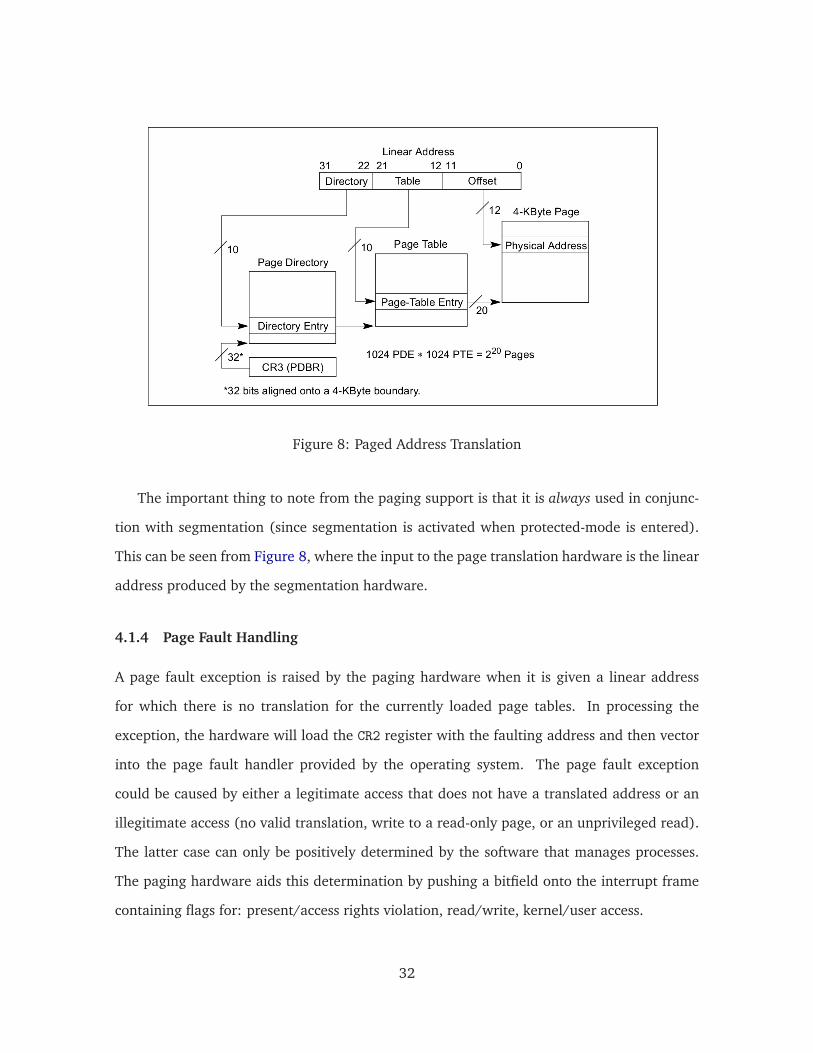
Figure 8: Paged Address Translation
The important thing to note from the paging support is that it is always used in conjunc-
tion with segmentation (since segmentation is activated when protected-mode is entered).
This can be seen from Figure 8, where the input to the page translation hardware is the linear
address produced by the segmentation hardware.
4.1.4 Page Fault Handling
A page fault exception is raised by the paging hardware when it is given a linear address
for which there is no translation for the currently loaded page tables. In processing the
exception, the hardware will load the CR2 register with the faulting address and then vector
into the page fault handler provided by the operating system. The page fault exception
could be caused by either a legitimate access that does not have a translated address or an
illegitimate access (no valid translation, write to a read-only page, or an unprivileged read).
The latter case can only be positively determined by the software that manages processes.
The paging hardware aids this determination by pushing a bitfield onto the interrupt frame
containing flags for: present/access rights violation, read/write, kernel/user access.
32

4.2 Modification Summary
This section summarizes the modification necessary to existing Minix 3 components in order
to implement MinixVM. The new server messages required are detailed in Section 4.3.
4.2.1 Kernel Modifications
• Register Access
As mentioned in Section 4.1, on a page fault, the Intel architecture loads the CR2
register with the linear address that raised the fault. An assembly routine read cr2
was added so that this value could be read in the page fault handler.
• Page Fault Exception Handler
The default action upon receiving a page fault exception in Minix 3 is to send a
SIGSEGV to the offending processes. This is consistent with the fact that a page
fault exception should never be thrown in Minix 3 (since memory is segmented
a wild memory access would result in a general protection fault). In MinixVM,
the page fault handler records the page fault information (i.e. reads the faulting
address out of the CR2 register) and notifies PM of the page fault.
• Virtual Memory Mapping
A few new functions were added to easily support the mapping of virtual addresses
to physical addresses.
• Exec System Call
The exec system call SYS EXEC was modified to record the page directory base ad-
dress into the kernel’s process data structure (a new entry added for this purpose).
The page directory base address must be in the kernel, so that the CR3 register can
be set to its value during a context switch.
33

• Process Switch
As mentioned in the last item, the kernel must load the CR3 register with the base
address of the hardware page tables. The process switch code was modified to
make this change.
4.2.2 PM Modifications
Of all the Minix 3 components, PM was modified most heavily. This is because PM is designed
to be the center of most MinixVM processing, in order to minimize the impact of the MinixVM
implementation on Minix 3 processing (most of the memory management operations are
routed through PM in Minix 3).
• Memory Management
The largest change to PM was in removing memory management from the PM
core. Memory management is only represented by allocation in Minix 3, so only
allocation needed to be moved to pager. The reasoning behind this is simple:
pager requires complete control of the physical address space. The three main
memory allocation functions, allocate, free, and copy free memory holes were
converted from function calls in PM to messages to pager: PAGER MEM ALLOC,
PAGER MEM FREE, and PAGER MEM HOLES COPY, respectively. This way, no other ap-
plications need be modified — their memory requests are simply routed through
pager. In addition to message pass-through, the initialization of PM was changed
significantly. Rather than reading the memory layout at boot and setting up the
memory allocation data structures, it merely records this information for pager to
process.
• Pager Initialization
As mentioned in the previous point, memory management was moved to pager
and memory initialization was deferred to pager as well. However, pager cannot
34
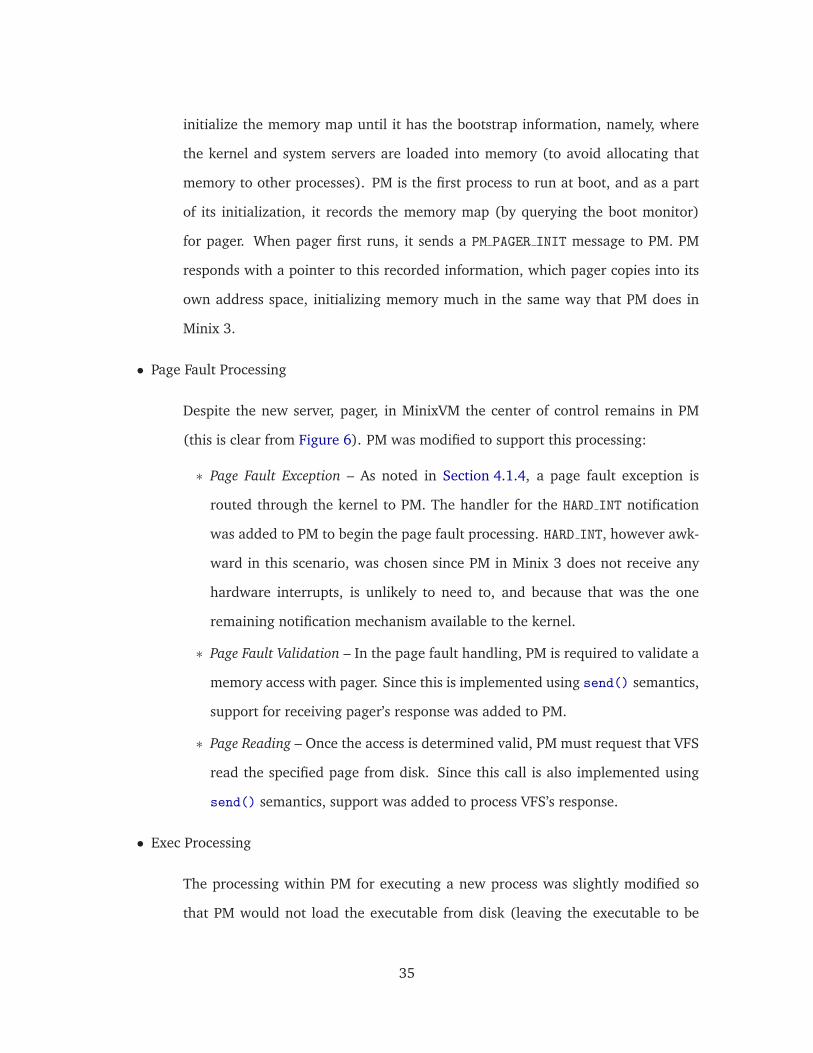
initialize the memory map until it has the bootstrap information, namely, where
the kernel and system servers are loaded into memory (to avoid allocating that
memory to other processes). PM is the first process to run at boot, and as a part
of its initialization, it records the memory map (by querying the boot monitor)
for pager. When pager first runs, it sends a PM PAGER INIT message to PM. PM
responds with a pointer to this recorded information, which pager copies into its
own address space, initializing memory much in the same way that PM does in
Minix 3.
• Page Fault Processing
Despite the new server, pager, in MinixVM the center of control remains in PM
(this is clear from Figure 6). PM was modified to support this processing:
∗ Page Fault Exception – As noted in Section 4.1.4, a page fault exception is
routed through the kernel to PM. The handler for the HARD INT notification
was added to PM to begin the page fault processing. HARD INT, however awk-
ward in this scenario, was chosen since PM in Minix 3 does not receive any
hardware interrupts, is unlikely to need to, and because that was the one
remaining notification mechanism available to the kernel.
∗ Page Fault Validation – In the page fault handling, PM is required to validate a
memory access with pager. Since this is implemented using send() semantics,
support for receiving pager’s response was added to PM.
∗ Page Reading – Once the access is determined valid, PM must request that VFS
read the specified page from disk. Since this call is also implemented using
send() semantics, support was added to process VFS’s response.
• Exec Processing
The processing within PM for executing a new process was slightly modified so
that PM would not load the executable from disk (leaving the executable to be
35

demand-paged later), to add the exec notification message to pager (Section 3.3.2),
and to support the new SYS EXEC signature.
4.2.3 VFS Modifications
This section describes the VFS modifications, all of which were made to support VFS’s role in
page fault handling (Section 3.3.3).
• Executable Data Addition
In order to support the MinixVM processing (namely reading pages from disk – see
the next point), the VFS image of a process was modified to include a few more
fields relating to executables.
∗ fp exec ino – The inode of executable. Without this, the VFS-portion of the
page fault handling would not know where the executable resides on the file
system (or would need to perform an expensive lookup on the file name every
page fault).
∗ fp exec fs e – The endpoint of the file system driver which controls the file
system where the executable resides. To uniquely identify a file in Minix 3,
the inode and the file system driver endpoint are needed, since all operations
require knowing which driver to communicate with and since the inode is
only unique on a single file system.
∗ fp exec hdrlen – The length of the executable header. This is needed to
properly calculate the offset into the executable file when reading portions of
it into memory (see the following points).
∗ fp exec textlen – The length of the text section for the executable.
∗ fp exec datalen – The length of the initialized data section for the exe-
cutable.
∗ fp exec bsslen – The length of the uninitialized data section for the exe-
cutable.
36

Adding these fields required modification of the exec-handling code, simply to
make sure that the values were recorded the first time VFS reads the executable
header.
• Page Reading
Since VFS must read a page into memory from disk to support page fault handling
(Section 3.3.3), code was added to VFS in order to do this. This code will request
that the relevant file system driver read either a page-sized chunk or to the extent
of the binary, whichever is smaller, into the page-aligned address it is given. The
only twist to this scheme is in how the data section is handled. In the case where
the page encompasses all initialized data, the entire page is read from disk. If the
page encompasses all BSS data, the page is zeroed. If, however, the page contains
a combination of initialized and uninitialized data, the initialized data is read in
and the remainder of the page is zeroed. In order to make the determination
of initialized/uninitialized data, this code requires the modifications to the VFS
process metadata. VFS assumes that the memory write is legal, which it should be
after the verification from pager.
4.3 New Server Messages
This section describes the new server messages and message parameters required by MinixVM
implementation.
4.3.1 New Kernel Messages
Message Parameters Description
SYS PAGEFAULT PGF TYPE The type of the message (one of PGF GET, PGF DONE)
PGF PROCNR The number of the faulting process
PGF ENDPT The endpoint number of the faulting process
Continued on next page
37

Table 1 – continued from previous page
Message Parameters Description
PGF PADDR The physical address associated with the virtual address
PGF VADDR The virtual address (the faulting address)
The SYS PAGEFAULT system call message is used by the pager to both get
the page fault information when it has been notified of a page fault by PM,
and to report back to the kernel about the validity of the page fault.
Table 1: New Kernel Messages
Note: new messages to the kernel are represented by system calls.
4.3.2 New PM Messages
Message Parameters Description
PM PAGER INIT NONE N/A
The PM PAGER INIT message is sent by pager during its ini-
tialization, so that it may get PM’s image of memory usage
(since pager is the memory allocator). PM replies to pager with
PAGER INIT REPLY
PM PGFAULT REPLY PM PGFAULT ENDPT The endpoint number for the
faulting process
PM PGFAULT VADDR The faulting (virtual) address
PM PGFAULT BASE The base address of the segment
where the page fault occurred
PM PGFAULT SEG The segment within which the
page fault occurred (text, data,
or stack)
Continued on next page
38

Table 2 – continued from previous page
Message Parameters Description
The PM PGFAULT REPLY message is sent by VFS once it is done
processing the page fault (started when PM sends PM PGFAULT
to VFS).
PM PGFCHECK REPLY PM PGFCHECK PROCNR The number of the process that
raised the page fault
PM PGFCHECK ENDPT The endpoint number of the pro-
cess that raised the page fault
PM PGFCHECK VADDR The (virtual) faulting address
PM PGFCHECK ANS The result of validity check
The PM PGFCHECK REPLY message is sent by pager once it has
completed determining the validity of of the page fault ad-
dress access. This message is sent in response to PM sending
PAGER PGFCHECK to pager.
PM PAGER EXEC REPLY PM PAGER EXEC PDBR The address for the base of the
hardware page tables
The PM PAGER EXEC REPLY message is sent by pager once it has
completed updating its process tables, in response to PM send-
ing pager PAGER EXEC.
PM PAGER ALLOC REPLY PM PAGER ALLOC BASE The base address for the page or
set of pages allocated
The PM PAGER ALLOC REPLY message is sent by pager once
it has completed allocating memory in response to a
PAGER MEM ALLOC message from PM. This functionality is in PM
in Minix 3 and in pager in MinixVM, since pager must do the
memory management.
Continued on next page
39

Table 2 – continued from previous page
Message Parameters Description
PM PAGER ALLOC REPLY PM PAGER ALLOC BASE The base address for the page or
set of pages allocated
The PM PAGER ALLOC REPLY message is sent by pager once
it has completed allocating memory in response to a
PAGER MEM ALLOC message from PM.
PM PAGER HOLES COPY REPLY PM PAGER HOLES COPY STATUS The status code returned by the
copy operation
PM PAGER HOLES COPY BYTES The number of bytes the hole list
occupies
PM PAGER HOLES COPY HI The high watermark for alloca-
tion
The PM PAGER HOLES COPY REPLY message is sent by pager
once it has completed copying the hole list to the specified lo-
cation (this is a throwback to the way Minix 3 manages mem-
ory and would not be present if VM were completely imple-
mented). This functionality is in PM in Minix 3 and in pager in
MinixVM, since pager must do the memory management.
Table 2: New PM Messages
4.3.3 New VFS Messages
Message Parameters Description
PM PGFAULT PM PGFAULT ENDPT The endpoint number for the faulting process
PM PGFAULT VADDR The faulting (virtual) address
Continued on next page
40

Table 3 – continued from previous page
Message Parameters Description
PM PGFAULT BASE The base address of the segment where the page fault
occurred
PM PGFAULT SEG The segment within which the page fault occurred (text,
data, or stack)
The PM PGFAULT message is sent by PM when it needs VFS to process a page
fault (read in a page from disk at the faulting address.
Table 3: New VFS Messages
4.3.4 Pager Messages
Message Parameters Description
PAGER INIT REPLY PAGER INIT CHUNKS A pointer to the memory chunk data struc-
ture in PM’s address space
The PAGER INIT REPLY message is sent by PM in response to pager
sending a PM PAGER INIT message. Pager copies the data structure
from PM’s address space.
PAGER EXEC PAGER EXEC PID The process ID of the newly exec’ed pro-
cess
PAGER EXEC ENDPT The endpoint number of the newly
exec’ed process
PAGER EXEC MEM A pointer to the process memory map (in
PM’s address space)
The PAGER EXEC message is sent by PM to pager on an exec(), so
that pager may populate its process image.
PAGER PGFCHECK PAGER PGFCHECK PROCNR The number of process to check
Continued on next page
41

Table 4 – continued from previous page
Message Parameters Description
PAGER PGFCHECK ENDPT The endpoint of the process
PAGER PGFCHECK VADDR The (virtual) faulting address to check
PAGER PGFCHECK ANS The result of the validity check
The PAGER PGFCHECK message is sent by PM to ask pager if a faulting
address is valid or not.
PAGER PGFDONE PAGER PGFDONE STAT The page fault processing status
The PAGER PGFDONE message is sent by PM to notify pager of the
status for the entire page fault process (so that pager may keep its
data structures consistent.
PAGER MEM ALLOC PAGER MEM ALLOC CLICKS The number of clicks (pages) to allocate
The PAGER MEM ALLOC message is sent by PM to ask pager to allocate
the specified amount of memory.
PAGER MEM FREE PAGER MEM BASE The base address of the pages to free
PAGER MEM CLICKS The number of clicks (pages) to free
The PAGER MEM FREE message is sent by PM to ask pager to free the
specified amount of memory at the specified location.
PAGER MEM HOLES COPY PAGER MEM HOLE A pointer to a block of memory (in PM’s
address space) into which the hole list can
be copied
The PAGER MEM HOLES COPY message is sent by PM to ask pager to
copy the memory hole list to the specified location. (This is a throw-
back to the way Minix 3 manages memory and would not be present
if VM were completely implemented.)
Table 4: Pager Messages
42

5 Performance Analysis
This section presents a brief, two-part performance analysis of the MinixVM prototype. The
first part analyzes the performance impact of paging in several common scenarios. The sec-
ond part examines the performance impact of paging as a function of the amount of memory
paged (i.e. number of page faults handled) for a fabricated sequential-scan test.
For all of the tests, the POSIX-specified time utility (provided by Minix 3) was used to
measure the amount of wall-clock time that elapsed from the beginning to the end of each
test. Each result is the average of three different wall-clock measurements, and the measure-
ment variance is small enough to be elided from the analysis. Also, for each test, only the
program tested is paged. The MinixVM prototype is capable of co-existing with the segmented
memory management scheme is such a way that one can specify a list of programs to be
paged — all others use the segmented memory management scheme. For example, during
the bzip2 performance test, only the bzip2 binary will be paged after being exec’ed.
5.1 General Program Runtime Tests
The general program runtime tests were designed to reflect a small set of common workloads,
including compression, decompression, archiving, and compiling.
For all of the general program runtime tests excluding the kbuild test, the subject file was
a 180 megabyte tarball containing 4242 files (the complete MinixVM source and supporting
project files). For these tests, the timed operation is the default action of the program listed
on the subject file (e.g. the gunzip test decompresses the subject tarball that was previously
compressed with gzip). The kbuild test measures the amount of time required to build
the system servers and bootable microkernel image from a clean MinixVM source tree. The
program actually paged in this test was cc, the C compiler from the Amsterdam Compiler Kit
(the compiler suite used to compile Minix 3).
Figure 9 shows the results from these tests:
43

0
50
100
150
200
250
gzip gunzip bzip2 bunzip2 tar untar kbuild
Tim
e (s
)
Program
Run Time
not pagedpaged
Figure 9: General Program Runtime
As would be expected, there is a measurable overhead with the paged versions of the tests.
On average, the paged versions are 1.08 times slower than their non-paged counterparts.
Interesting to note is the significant difference in the performance for the tar test (1.33
times slower in the paged version). This is likely due to the memory access pattern of tar —
one-use sequential. This is an effect that will be come more apparent in the binary scan test
described in the next section.
5.2 Sequential Scan Tests
While the tests of common workloads given in the previous section are informative, they fail
to describe the performance overhead as a function of program memory requirements. To
test this relationship, a set of sequential scan tests were created.
There are two types of the sequential scan test. Both tests follow the same algorithm:
44

statically declare an array of sizes ranging from 2 to 64 in power-of-two increments, initialize
the array, reduce it to a scalar, and then print the result. The difference between the two
tests is that the first (the binary test) is written in C, compiled to an executable, and then the
entire executable is paged. The second test (the perl test), however, is written in perl and
interpreted (the perl binary is paged in this test).
Figure 10 summarizes the results from these two tests:
0
0.5
1
1.5
2
2.5
0 1000 2000 3000 4000 5000 6000 7000 8000 9000
Tim
e (s
)
Scan Size (pages)
Binary Scan Size vs. Run Time
not pagedpaged
(a) Binary Scan
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0 10 20 30 40 50 60 70
Tim
e (s
)
Scan Size (pages)
Perl Scan Size vs. Run Time
not pagedpaged
(b) Perl Scan
Figure 10: Scan Performance
From Figure 10, it is clear that there is a far more significant performance impact for the
binary test than the perl test. More specifically, on average, the paged version of the binary
test is 4.7 times slower than the non-paged version (ranging from 3 to 6 times slower), where
the paged version for the perl test is only 1.07 times slower. This is most likely an artifact
of the fact that the second test is interpreted — the binary must load all of the statically
allocated memory in unique pages, eventually, where the perl interpreter can reuse memory
pool data to manipulate the array, resulting in fewer page faults. The slight difference in
the performance of the paged and non-paged versions in the perl test is likely due to the
overhead associated with the page faults that the paged version could not avoid.
Also of note is the observation that the runtime for the paged version of the binary test
increases much faster than its non-paged counterpart. This is to be expected, since the paged
45

version must pay the cost of several expensive mode switches (in the form of the page fault
handling) with each new page, whereas the non-paged version need only pay this cost once
(during initial load).
5.3 Summary
It is not surprising that all paged versions of the tests in this section suffered a performance
penalty due to the paging overhead. This overhead is not due to the extra processing required
so much as the frequent mode switches (from user to kernel mode and vice versa) required
by the page fault handling algorithm (described in Section 3.3.3). This is most apparent in
binary test from Figure 10, where the runtime of the paged version grows in proportion to
the number of page faults handled.
These data demonstrate that, because the mode switches are required by the microker-
nel architecture, a VM implementation in a microkernel must necessarily be slower than a
comparable VM implementation in a monolithic kernel.
46

6 Future Work
Due to time constraints, a full MinixVM implementation was not completed. This section
enumerates the largest outstanding issues as well as extensions that could be added on to
MinixVM.
6.1 Removing Segmentation
The MinixVM implementation as presented in this report is not a complete VM implementa-
tion. In order to fully support VM, the address space of a process must be presented as the
maximum possible (e.g. 4GB on a machine with 32-bit addressing), not limited by segment
boundaries.
There are a number of issues that prevented the easy removal of segmentation:
• Binary Layout
Binaries in Minix 3 are generated starting with address offset zero in each section.
The Minix 3 loader depends upon the architectural segment descriptor to apply
segment offsets when creating the linear address. Ordinarily, an operating system
has an established loading convention, so that binaries have their sections tagged
with addresses that the loader expects in VM. In the MinixVM implementation
presented is this report, this is impossible, since segments encompass the entire
program and these physical addresses are not known until runtime. (In a VM
environment, it does not matter that two programs “load themselves at the same
location” since they are loading at the same virtual addresses.)
In order to support VM, either the binaries would need to be regenerated to have
the agreed upon virtual addresses, or the binaries would need to be dynamically
translated (addresses rewritten) at runtime. The former would probably be best
approach, since it only occurs the one-time compilation penalty.
47

• Memory Copy Operations
Minix 3 makes heavy use of memory copy operations, since its message system is
only capable of sending fixed-length messages. When a message in Minix 3 has
a payload that exceeds the fixed-length, it instead sends a pointer to the data in
the sender’s address space. The receiver uses a system call to have the kernel copy
the data into the receiver’s address space. This is straightforward to implement
in segmented memory management, since a byte-by-byte copy is available. This
process is not straightforward in a VM environment. First, the address would need
to be translated to the physical pages (page by page). In MinixVM this must either
occur in pager or the kernel must read pager memory (since that is where the
page tables are located). If the memory copy refers to pages that are swapped out,
the translation must occur in pager (since the hardware page tables are just the
subset of pages allocated to a process that are currently in memory). Therefore,
if swapping is enabled, MinixVM will have a reverse dependency between the
kernel and pager — the kernel would depend upon a userspace program in order to
perform a kernel operation. Without being able to do dynamic memory allocation
in the kernel, this problem is not solvable in the general case. This is yet another
example of where the the “ideal” microkernel architecture must be violated to
provide even the most fundamental OS abstraction.
6.2 System Server Reloading
Ideally, the system servers would be reloaded into virtual memory address spaces at boot, by
some bootstrap code, so that they could be paged like any other process.
6.3 VM Extensions
There are a number of extensions that naturally fall out of a VM implementation with minimal
effort. All of these extensions are only valid in a MinixVM environment — the memory model
of Minix 3 makes them impossible.
48
At the very least, pager should be reloaded in order to avoid issues with allocating space
for the page table data structures. In lieu of reloading it in a paged manner, it would just
have its stack section moved, to the same effect.
6.3.1 Page Swapping
Swapping refers to writing out pages from memory to disk, in order to increase the available
amount of memory. This is an artificial increase, but critical to maintaining the abstraction
that processes may use the entire space of available memory.
6.3.2 Copy-On-Write Page Sharing
Copy-On-Write (COW) page sharing is a technique of memory sharing by which a fork()
does not necessarily result in the copying of all memory from the parent process to the child
(as it does by default in Minix 3). Instead, pages are mapped into the page tables of both of
the processes, used until one writes to a shared page. Once written to, both processes get
their own copies. This technique results in efficient memory utilization in the common case
where the child replaces its memory map with an exec() soon after the fork().
6.3.3 mmap()
Memory mapping through mmap() is one of the core functionalities of the POSIX specification
(also known as the Single Unix Specification) [8], and is missing from Minix 3 — because
memory mapping is extremely difficult to implement in a purely segmented memory manage-
ment scheme. Memory mapping is core to many modern applications, making it impossible
to port applications from other environments (e.g. Linux) without having to rewrite portions
of non-trivial application code. In some cases, it is impossible to replicate the functionality of
memory mapping, making the porting impossible.
49

6.3.4 Dynamic Linking
Dynamic linking — reading common library code into memory as needed during execution —
is a common technique used in modern operating systems to amortize the memory footprints
of running programs and to reduce on-disk library storage. In order to reduce memory usage,
dynamic linking only loads that code which is necessary, and as a further optimization, since
most library code only writes to the stack (or in the calling program’s heap) library code
pages can be mapped into many running processes simultaneously. To reduce the on-disk
profile of programs, dynamic linking does not require that every binary effectively be self-
contained – duplicating shared functionality. Dynamic linking also cuts down on load time,
since oftentimes, the required pages are already loaded into memory.
50

7 Conclusion
The design and implementation of MinixVM presented in this report demonstrates that it
is possible to implement VM in a microkernel that cannot do dynamic memory allocation
in the kernel. It also clearly demonstrates that the design is overly complicated in relation
to the conceptual representation of VM. This should not be surprising, since most of the
operating system primitives that developers have come to expect were originally designed
for monolithic operating systems.
As for the fate of the microkernel architecture, Tanenbaum famously stated in 1992 that
Linux, and by extension the monolithic approach to implementing operating systems, was
obsolete [9]. The current proliferation of Linux and other monolithic kernels compounded
with the relative obscurity of Minix 3 perhaps provides a more realistic appraisal of the
monolithic kernel’s obsolescence.
While in terms of high-level design microkernels seem to provide significant advantages
over their monolithic counterparts, it is an inescapable fact that programming microkernels
is hard. Even noted kernel hacker and open source evangelist Richard Stallman admitted
this in his failure to create the GNU Hurd microkernel operating system [7]. All of the com-
plicated and in some cases intractable problems associated with building distributed systems
are wrapped up in a microkernel. This is in addition to the fact that developing an operating
system is already a sufficiently hard engineering problem.
These difficulties not withstanding, it would seem as if the failure of the microkernel
architecture is built into its design. Developing a real-world complex system is an exercise in
constant compromise. The problem with the microkernel design is that most of its advantages
are based upon the rigid adherence to the boundaries imposed by the design. As soon as these
boundaries are violated, many of the advantages evaporate, and all that remains is a difficult
to program hybrid operating system.
It is easy to argue that progress has been made in using the microkernel design to increase
fault tolerance and provide more trusted computing environments, but as demonstrated by
MinixVM, this comes at the cost of providing even the most basic operating system services.
51

8 References
[1] A. Chou, J. Yang, B. Chelf, S. Hallem, and D. Engler, An Emperical Study of Operating
System Errors, In Proc. 18th ACM Symp, on Oper. Syst. Prin., pages 73–88, 2001.
[2] Jorrit N. Herder, Herbert Bos, Ben Gras, Philip Homburg, and Andrew S. Tanenbaum
“Construction of a Highly Dependable Operating System”, Proc. 6th European Depend-
able Comp. Conf., Oct 2006.
[3] Jorrit N. Herder, Herbert Bos, Ben Gras, Philip Homburg, and Andrew S. Tanenbaum
MINIX 3: A Highly Reliable, Self-Repairing Operating System, ACM SIGOPS Operating
Systems Review, vol. 40, nr. 3, pp. 80–89, July 2006.
[4] Intel 64 and IA-32 Architectures Software Developer’s Manual, Volume 3A: System Pro-
gramming Guide, Part 1, November 2008.
[5] Intel 64 and IA-32 Architectures Software Developer’s Manual, Volume 3B: System Pro-
gramming Guide, Part 2, November 2008.
[6] J. Liedtke. On µ-Kernel Construction. In Proc. 15th ACM Symp. on Oper. Syst. Prin.,
pages 237250, Dec. 1995.
[7] J.T.S. Moore (writer, director, producer), “Revolution OS”, Documentary film on the
free software movement, available at: <http://www.revolution-os.com/>, 2001.
[8] The Single UNIX Specification, Version 3, ISO/IEC 9945:2003, IEEE Std 1003.1-2001.
[9] Andrew Tanenbaum, “LINUX is obsolete”, Posted on comp.os.minix, archived
at: <http://groups.google.com/group/comp.os.minix/browse thread/thread/
c25870d7a41696d2/f447530d082cd95d?tvc=2>, 1992.
52

9 Appendix: MinixVM Patch Summary
The following is a summary of the MinixVM patch (for Minix version 3.1.3a), created using
the diffstat utility.
etc/usr/rc | 5
include/minix/com.h | 72 +++++++
include/minix/const.h | 6
include/minix/syslib.h | 2
kernel/Makefile | 2
kernel/arch/i386/.depend | 2
kernel/arch/i386/Makefile | 1
kernel/arch/i386/exception.c | 47 ++++
kernel/arch/i386/klib386.s | 12 +
kernel/arch/i386/memory.c | 90 +++++++++
kernel/arch/i386/mpx386.s | 2
kernel/arch/i386/proto.h | 1
kernel/arch/i386/sconst.h | 1
kernel/config.h | 1
kernel/pagefault.h | 9
kernel/proc.h | 1
kernel/proto.h | 3
kernel/system.c | 12 +
kernel/system.h | 5
kernel/system/.depend | 37 +++
kernel/system/Makefile | 7
kernel/system/do_exec.c | 8
kernel/system/do_pagefault.c | 75 +++++++
kernel/system/do_vm.c | 11 +
kernel/table.c | 2
lib/syslib/sys_exec.c | 4
servers/Makefile | 3
servers/pager/.depend | 103 ++++++++++
servers/pager/Makefile | 34 +++
servers/pager/alloc.c | 256 ++++++++++++++++++++++++++
servers/pager/alloc.h | 12 +
servers/pager/entries.h | 56 +++++
servers/pager/exec.c | 76 +++++++
servers/pager/exec.h | 11 +
servers/pager/page.h | 12 +
servers/pager/pager.c | 126 +++++++++++++
servers/pager/pager.h | 25 ++
servers/pager/pagetable.c | 120 ++++++++++++
servers/pager/pproc.c | 3
53
servers/pager/pproc.h | 26 ++
servers/pager/version.c | 1
servers/pm/.depend | 81 +++++++-
servers/pm/Makefile | 7
servers/pm/alloc.c | 410 ++-----------------------------------------
servers/pm/exec.c | 49 ++++-
servers/pm/globalpage.c | 131 +++++++++++++
servers/pm/main.c | 59 +++++-
servers/pm/pagefault.c | 151 +++++++++++++++
servers/pm/proto.h | 16 -
servers/pm/queue.h | 215 ++++++++++++++++++++++
servers/pm/type.h | 1
servers/vfs/.depend | 80 ++++++++
servers/vfs/Makefile | 3
servers/vfs/exec.c | 18 +
servers/vfs/fproc.h | 8
servers/vfs/main.c | 13 +
servers/vfs/misc.c | 2
servers/vfs/page.c | 145 +++++++++++++++
servers/vfs/pagefault.c | 33 +++
servers/vfs/proto.h | 8
tools/Makefile | 1
tools/revision | 1
62 files changed, 2274 insertions(+), 440 deletions(-)
Download the full MinixVM patch (for Minix 3.1.3a).
54