Embed Size (px)
DESCRIPTION
Mixing TIMES and QuEUE LENGTH BOUNDS FOR GLAUBER DYNAMICS-BASED CSMA Scheduling. R. Srikant University of Illinois at Urbana-Champaign Joint work with Libin Jiang, Mathieu Leconte , Jian Ni and Jean Walrand (Berkeley). Introduction. - PowerPoint PPT Presentation
Citation preview

MIXING TIMES AND QUEUE LENGTH BOUNDS FOR GLAUBER DYNAMICS-BASED CSMA SCHEDULING
R. SrikantUniversity of Illinois at Urbana-Champaign
Joint work with Libin Jiang, Mathieu Leconte, Jian Ni and Jean Walrand (Berkeley)

2
Introduction Glauber Dynamics Inspired CSMA Scheduling
Algorithms Low complexity, fully distributed Can achieve maximum throughput However, queueing performance is not well
understood
The mean queue length can be related to the amount of time (mixing time) that the Glauber dynamics takes to converge to equilibrium. We study the mixing time as a function of the
nodes in the network.

Conflict Graph of a Wireless Network
Each vertex in the conflict graph represents a wireless link.
An edge connects two vertices if the corresponding wireless links interfere with each other.
Feasible schedule: a set of vertices (links) which are not neighbors in the conflict graph (an independent set).
1
2
3
4
5
7
6
Example of feasible schedule: {1, 4, 7}Represented by a binary vector x = (1, 0, 0, 1, 0, 0, 1)xi=1 if link i is included in the schedule and 0 otherwise
4

5
Throughput Optimality Associate each link i with a weight wi . The
weight of a schedule x is w(x) = i2x wi.
Want the following probability of picking schedule x:
In wireless networks, if weights are chosen as appropriate functions of queue lengths, an algorithm which chooses schedules from this distribution is throughput-optimal.

Randomly select an update set m with probability qm: a set of vertices that are allowed to change their states; other vertices do not change their states.
For each vertex v 2 m do If no vertices in its neighborhood N(v) were
active in the previous slot, v will decide to becomeactive with probability pv=v/(1+v) xv=1 inactive with probability1-pv: xv=0
Else, v will be inactive: xv=0
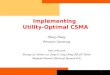
Parallel Glauber Dynamics (PGD)7

Current schedule: x(t)={1, 5} Select an update set: m={3,
5, 6} Allowed decisions for links in
m: link 3: x3=0 (no choice) Link 5: x5=0 (w.p. 1-p5) link 6: x6=1 (w.p. p6)
Other links’ states unchanged New schedule: x(t+1)={1, 6}
1
2
3
4
5
7
6
Illustration of PGD-CSMA8

Dynamics of Schedules x(t) evolves as a Discrete-Time Markov Chain (DTMC) Proposition (Ni & S.) If the probability of updating
every link is positive, the steady-state probability of using schedule x has the following product-form:
By letting i =exp(wi), we have Discrete-time version of the algorithm studied by
Jiang and Walrand
9
xi
iZx 1)(

11
Main Result Theorem 1: Consider a network with n
links and maximum interference degree . If the arrival rate vector 2 for some < 1/ which is also independent of n, then a) there exist fugacities such that the
queue lengths are stable, and b) the expected queue length per link is
O(log n) under PGD-CSMA.

12
Queue Length Evolution
Time slotted system; fugacities chosen to ensure stability
ai(t): # of packets arriving at link i in slot t xi(t): scheduling variable 2 {0,1} (determined by PGD-
CSMA) Qi(t): queue length of link i at the end of slot t Queue dynamics: Exact computation of mean queue lengths appears to
be hard because the schedules are correlated both spatially and temporally.
ai(t) ai(t+1)xi(t) xi(t+1)
Qi(t) Qi(t+1)slot t slot t+1 slot t+2

13
Drift Analysis
Sample the system once every T=Tmix/ slots (Tmix is the mixing time ; T is sufficiently large for the Markov chain to reach steady-state; thus, the empirical average service given to a link over T time slots is “close” to the steady-state mean)
Test function Compute drift:
Setting E(drift)=0 yields a bound on E(Qi).
T slots

14
Queue Length Bound Expected queue length is upper bounded by a
linear function of the mixing time:
Often the conductance method is used to estimate Tmix. Leads to bounds which grow exponentially in n, the number of links in the network.
We prove a logarithmic bound on Tmix for graphs with bounded degree using the coupling method

Mixing Time of a Markov Chain
Roughly speaking, the time required to reach steady-state
The variation distance between two distributions , is defined as:
The mixing time Tmix of the MC is the time required for the MC to get close to the stationary distribution:
15

Coupling (X(t), Y(t)) is a coupling if both {X(t)} and
{Y(t)} are two “copies” of a Markov chain, and once X(t)=Y(t), then X(t+1)=Y(t+1) henceforth.
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
X(t)
Y(t)
t=0 t=1 t=2 t=3 t=4 t=5
…
16

Coupling Theorem Let d(x,y) be some distance metric
between two states of the Markov chain (NOT the variation distance).
Theorem: Suppose there exist a constant < 1 and a coupling (X(t),Y(t)) of the MC such that
Then the mixing time is bounded by Tmix · log(De)/(1-)
where D is the ratio between max and min distances between two distinct states.
17

Path Coupling Theorem Under the coupling theorem, we have to check
the condition
for all pairs of schedules to estimate .
Bubley&Dyer ’97 introduced the path coupling theorem, under which, in our context, we only need to check those x and y which are different at only one link, for example
x = (1, 0, 0, 0, 1, 1, 0)y = (1, 0, 0, 0, 1, 0, 0)
18

Coupling on Conflict Graph
Distance metric: weighted Hamming distance with weights f(v) for all vertex v.
Coupling: both chains select the same update set and use the same coin toss when a vertex in the update can be added to both schedules
1
2
3
4
5
7
6
1
2
3
4
5
7
6
19
X(t) = (1, 0, 0, 0, 1, 1, 0) Y(t)= (1, 0, 0, 0, 1, 0, 0)
d(X(t), Y(t)) = f(6)
X(t+1)= (1, 0, 0, 0, 0, 1, 0) Y(t+1)=(1, 0, 0, 0, 0, 1, 0)
d(X(t+1), Y(t+1)) = 0

Useful Lemma Lemma: Consider a pair of adjacent schedules
x and y that differ only at v, we have
20
If v is selected to update (with prob. qv), distance will decrease by f(v)
If a neighbor w 2 N(v) is selected to update (with prob. qw) and w decides to become active (with prob. w/(1+w), distance will increase by f(w)

Fast Mixing Theorem: For any weight function f(v)>0
of v2V, let m = min f(v), M = max f(v), D=M/m, if
then the mixing time of PGD is bounded by
21

Condition for Fast Mixing Choose f(v)=dv/qv where dv is the degree of
vertex v in the conflict graph, then if v < 1/(dv-1) for all v
where
22

23
Proof of Main Result For bounded-degree conflict graphs (dv · ), using a
simple distributed randomized scheme, qv can be lower bounded by some constant (i.e., independent of n), so both M and D can be upper bounded by some constants.
When arrival rate vector 2 for some < 1/ where is independent of n, then v · 1/( -1)- for some constant , so can also be lowered bounded by some constant.
Therefore, Tmix=O(log n), and by our previous queue length analysis, E[Qi] = O(log n) for every link i.

24
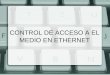
Summary The average queue length
(delay) grows logarithmically with the size of the network when the arrival rate lies in a fraction of the capacity region Fast mixing of Parallel Glauber
Dynamics The fraction is lower bounded by
1/, where is the maximum vertex degree in the conflict graph
Polynomial growth in delay can also be shown for the case where the weights are chosen adaptively as a function of queue lengths
Low-delay region
capacity region
When the arrival rate lies in this region, the delay grows logarithmically with the size of the network under CSMA.
CSMA can stabilize the network queues for all arrival rates in the capacity region.