Embed Size (px)
Citation preview

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
Mobile Services (ST 2010)Chapter 9: Positioning
Axel Küpper
Service-centric NetworkingDeutsche Telekom Laboratories, TU Berlin

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
2
Mobile ServicesSummer Term 2010
9 Positioning9.1 Fundamentals of Positioning
9.2 Global Positioning System
9.3 Cellular Positioning
9.A Code Division Multiple Access
9.B Circular Lateration
9.C Hyperbolic Lateration
2

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningOverview (I)
Positioning
Process to obtain the spatial position of a target
Various methods differing from each other in a number of features and parameters (quality, overhead,...)
Features of positioning
One or several parameters observed by measurement methods (observables)
Positioning method for position calculation
Descriptive or spatial reference system
Infrastructure
Protocols for coordinating the positioning process
Observables
Reflects the spatial relation of a target relative to a single or a number of fixed points in the surrounding environment
Examples for observables: angles, ranges, range differences, velocity
Fixed point: point of well-known coordinates of a base station, e.g., cellular base station or satellite
Observables are measured by utilizing physical fundamentals of pilot signals (or simply pilots)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningOverview (II)
Derive the target's position by taking into consideration measurement results of observables and coordinates of reference stations
Deliver the target's position with regard to a descriptive reference system (e.g., cell identifier) or a spatial reference system (e.g., WGS-84)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningPositioning Infrastructure
Distributed infrastructure for implementing positioning
Components
Terminal attached to the target person
Reference stations at well-known coordinates
Control units for coordinating positioning

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningQuality Parameters (I)
Accuracy
Refers to the closeness of several position fixes to the true but unknown position of a target
The farther away a position fix is from the true position, the lesser is the degree of accuracy and vice versa
Precision
Refers to the closeness of a number of position fixes to their mean value
Yield and Consistency
Yield refers to the ability of a positioning method to obtain position fixes independent of the environment (indoor, rural, urban)
Consistency is a measure for the stability of accuracy in different environments
Overhead
Signaling overhead: reflects the amount of messages exchanged between terminal and infrastructure as well as within the network infrastructure to control positioning
Computational overhead: refers to the waste of processing power that occurs in the control units or databases of the network and at the terminal
Power consumption: battery consumption caused by positioning at the mobile terminal
High degree of accuracy of position fixes usually causes a high overhead and vice versa

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningQuality Parameters (II)
Latency
Refers to the time period between a position request and the subsequent delivery of a position response
Important measure: Time to First Fix (TTFF) (which for GPS is in the range of several tens of seconds)
Roll-out costs
Costs for installing a standalone infrastructure for positioning or to extend an existing one
Operating costs
Costs for operating a positioning infrastructure
Indoor positioning: less or no operating costs
Satellite positioning: exhaustive running charges

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.1 Fundamentals of PositioningPositioning Methods Overview

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemOverview and History
Initial goal of GPS: establish a global, all-weather, continuously available, highly accurate positioning and navigation system for military purposes
Early 1970s: activities on GPS started under the term Navigation Satellite Timing and Ranging System (NAVSTAR)
1978: first of a nominal constellation of 24 satellites was launched
1983: bombardment of a Korean airline flight over the territory of the Soviet Union caused the US to pronounce to open up GPS for civil use
1986: Accident of the Challenger space shuttle (which was responsible for significant delays in the completion of GPS)
1995: GPS was formally declared ready for full operation
2000: Bill Clinton directed to discontinue the Selective Availability feature on a permanent basis

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemGPS Control Segment
Monitor stations
Equipped with GPS receivers for monitoring and tracking the satellites
Control the health of each satellite, their orbits as well as the accuracy of their internal clocks
Uplink stations
Transmit control data to the satellites
Master control station
Processes control data received from monitor stations
Calculates clock corrections and satellite ephemerides
Correction of satellite orbits, clock keeping, signal encryption
Assembles set of control data for each satellite

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemGPS Satellite Constellation
Satellite constellation: number and positionsof satellites in space
Constellation has been arranged in a way that any point on the Earth's surface iscovered by at least four satellites
GPS consists of nominally 24 satellites (but more of them are launched in order to be ableto immediately replace malfunctioning ones)
Satellites circulate the Earth on six orbits with nominally four satellites per orbit
Orbits are equally spaced 60° apart from each other and have an inclination angle of 55°
Orbit altitude: 20,200 km with regard to mean sea level
Satellites repeat the same ground track exactly twice each sidereal day
Sidereal day: corresponds to the time it takes for the Earth to turn 360° and lasts 23h, 56 min and 4.09s

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPilot Signals and Spreading Codes (I)
GPS Positioning: terminal-based - circular lateration - timing measurements by code phase ranging
GPS receiver measures ranges to the satellites and must know the satellites' position at the time the ranges are measured
GPS pilot signals
Carry two different ranging codes that are used for measuring the signal traveling time
Carry a navigation message, which contains assistance data like satellite orbits, clock corrections, and system parameters
Demodulated carriers of signals are generated as multiples of the fundamental frequency f0=10.23 MHz of the satellites' clocks
L1 carrier: fL1=f0154=1575.42 MHz (civil signal)
L2 carrier: fL2=f0120=1227.6 MHz (military signal)
L5 carrier: additional civil signal that will be available after GPS modernization in a few years
Use of spread spectrum technology in GPS …
… because spread signals are less susceptible to distortion and jamming than conventional narrowband signals (improving reliability of GPS service)
… as multiple access scheme for GPS satellites

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPilot Signals and Spreading Codes (II)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPilot Signals and Spreading Codes (III)
C/A code
Provide moderate level of accuracy
Used for civil purposes
Modulated onto the L1 carrier
Consists of 1023 chips and is repeated every millisecond
Requires 1 MHz bandwidth
Each chip has a length of 300 m
Entire C/A code repeats itself every 300 km between satellite and receiver
P-code
Yields much better accuracy than C/A codes
Can only be interpreted by military applications
Modulated onto L1 and L2 carriers
Very long code consisting of approx. 1014 chips
Entire P-code does not repeat for 38 weeks
Requires 10.23 MHz bandwidth
Simultaneously modulated onto L1 and L2 carriers
P-code is shared between all satellites in that each satellite is assigned a certain one-week segment of it

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPilot Signals and Spreading Codes (IV)
Before modulation, C/A code is mixed with navigation message with a spreading factor of 20,000, resulting in a data rate of 50 bps
C/A code and P-code are modulated onto L1 carrier using binary PSK and shifted by 90°from each other
L2-carrier is modulated by P-code only, also by using binary PSK

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
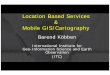
9.2 Global Positioning SystemNavigation Message (I)
Navigation message is transmitted in a frame structure
Frame consists of 5 subframes, each with a length of 300 bits
Frame transmissions are continuously repeated every 30 s
TLM (telemetry)
Indicates the beginningof a new subframe andused for synchronizationpurposes
Carries information aboutrecent operations performedon the transmitting satellite(e.g., upload of new ephemeris)
HOW (handover word)
Time-of-week (TOW) of subsequent sequence(required for synchronizationwith P-code)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemNavigation Message (II)
Ephemeris
Contains all information needed by the receiver to compute the exact satellite position in space when performing measurements
Keplerian parameters
Valid reference time
Satellite's angle velocity
Correction parameters that describe the perturbing forces on the satellite
Does not reflect the satellite position at the time of transmission, but refers to a certain reference time from which the receiver can then estimate the current position
Almanac
Subset of each satellite's ephemeris and clock data
Contains Keplerian elements and angle velocity, but no correction parameters
Helps to speed up the tart-up time of GPS receivers since it enables to obtain a rough overview of the current satellite constellation when the receiver is turned on
Ionospheric data
Parameters of the ionospheric delay used by the GPS receiver to reduce the timely impacts of a signal when passing the ionosphere

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemNavigation Message (III)
Almanac and ionospheric data represent too much data to be carried in a single frame
Transmission is distributed over 25 consecutive frames (masterframe)
Within a masterframe, subframes 1, 2, and 3 are repeated in each frame, while subframes 4 and 5 carry only portions of the almanac
Masterframe has a duration of 12.5 minutes

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemGPS Positioning Services
Standard Positioning Service (SPS)
Positioning and timing service focusing on the civilian user
Based on C/A code transmitted at the L1 carrier
Initially designed to accomplish a predictable accuracy of 100m horizontally and 156m vertically
Precise Positioning Service (PPS)
Positioning, timing, and velocity service for military purposes
Based on C/A and P-code transmissions on both carriers
Predicted accuracy is within at least 22m horizontally and 27.7m vertically
Usage restricted to authorized users (U.S. and allied military)
Selective Availability (SA)
Intentional degradation of accuracy of SPS users on a global basis
Developed as it turned out after GPS went into operation that SPS users achieved a much higher accuracy than initially intended
Accomplished by falsifying the orbit data of satellites carried in the navigation messages and by manipulating the satellites' clock frequency
Discontinued in May 2000

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPositioning Step 1 – Identification of Satellites
GPS receiver must in the first step determine the satellites to be used for range measurements
5 to 10 satellites are typically in the visible horizon of a receiver
Identification procedure depends on the state of the receiver
Cold start-up (40-60s)
Receiver has no information about its last position and no valid almanac
Receiver must listen to the transmission on the L1 carrier and auto-correlate the received C/A codes with the entire C/A code space
Warm start-up (30-40s)
Receiver knows its last position and has almanac
Receiver can roughly estimate current satellite constellation
Hot start-up (5-15s)
Receiver has valid ephemeris, which allows to determine current satellite constellation very accurately

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPositioning Step 2 – Ranging
Code phase ranging for SPS and PPS
Dual-frequency ranging: PPS uses code phase ranging on both carriers and can thus adjust much better to ionospheric refraction
Carrier phase ranging can be applied optionally, but is very time consuming and thus not applicable for real-time application like LBSs
Range measurements must be made to at least four satellites for applying circular lateration in 3D

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemPositioning Step 3 – Position Calculation
Ranges measured to satellites are pseudoranges and are subject to errors
For correcting errors, navigation message contains coefficients of a correction formula, which the receiver applies on the measured ranges to achieve more accurate results
Coordinates of the satellites at the time of measurements can be derived from Keplerian elements transmitted in the navigation message
Time offset between receiver time and GPS time is modeled as an additional unknown in the system of equations for circular lateration:
In the last step, derived ECEF-coordinates are translated into LLA coordinates based on a selected datum (default is WGS-84)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemDifferential GPS (I)
Principle
Observe and measure pilot signals from the satellites at a well-known position (reference station) and determine the difference between the measured range and an approximation of the true range derived from the known position of observation
Derived difference then serves as a correction value for GPS receivers staying close by

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.2 Global Positioning SystemDifferential GPS (II)
Calculation of the range between the known position (xrs, yrs, zrs) of the reference station and the position (Xi, Yi, Zi) of the ith satellite:
Difference between the calculated range ci,rs and the measured range pi,rs:
with ti,rs being the time offset and i,rs representing the range difference resulting from error sources like ionospheric refraction
Reference station calculates
and transmits it to close-by mobile GPS receivers (for example, via GSM/GPRS or UMTS)
Mobile GPS receiver corrects each measured pseudorange pi,mr by the related correction term:
Assumption: errors in the pseudoranges are temporally and spatially correlated if the observations are made in the same local region
Reference station and mobile GPS-receiver should not be separated from each other by distances larger than 60-70 km
Within this distance, ranges observed by reference station and GPS receiver usually experience tropospheric, ionospheric, multipath, and noise errors of similar magnitude
Thus, i,sr and i,mr cancel out each other:

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningOverview of LCS Architecture
Location Service (LCS): GSM/UMTS term for positioning method
LCS architecture: extension of existing GSM/UMTS architecture for enabling LCS
Mobile Location Center (MLC): control and coordination of positioning
Serving MLC (SMLC): control of positioning in the access network
Gateway MLC (GMLC): interconnectivity to external LCS clients
Location Measurement Unit (LMU): Timing synchronization of base stations

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningProximity Sensing and CEllID
Easiest and most widespread positioning method
Based on the limited range of coverage of radio, infrared, or ultrasound signals
Position of a target is derived from the coordinates of the serving base station
GSM and UMTS: Cell-Id, Cell-of-Origin (CoO), or Cell Global Identity (CGI)
Indoor: WLAN hotspot area, RFID range, ...
Problem (if implemented as terminal-based approach): mapping of cell-identifiers onto geographic coordinates

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningProximity Sensing and CEllID with Timing Advance
Timing Advance (TA): corresponds to the distance between terminal and base station with an accuracy of approx. 500 m
Estimated position corresponds to a ring around the base station (omnidirectional antennas) or the part of a ring (sectorized antennas)
Terminal is only “heard” by one base station at a time, why lateration based on the TA parameter is not possible
Network-based: position is estimated by the network
Cell-Id only specified in combination with TA parameter (pure Cell-Id methods applied today are based on proprietary solutions)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
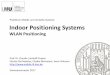
9.3 Cellular PositioningSignaling Flow for CellID
Busy mode: cell and TA are known to the network and can be requested from the serving BSC
Idle mode: no connection exists and the terminal must be paged

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (I)
Enhanced Observed Time difference (EOTD) or Downlink Time Difference of Arrival (DL-TDoA)
Based on hyperbolic lateration
Terminal-based positioning method
Requires terminals with special firmware
Geometric Time Difference (GTD):
GTD=(d2-d1)/v
with v: velocity of light
Problem: No synchronization of GSM and UTRAN FDD Node B’s

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (II)
Solution: Measure not only the time intervals between arrival of signal bursts at the terminal, but also the time offset between emission at the base stations
Real Time Difference (RTD): time offset between emission of signal bursts at the base stations
Observed Time Difference (OTD): time offset between arrival of signal bursts at the terminal
GTD=OTD-RTD

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (III)
OTD values are derived by the terminal
Radio Interface Timing (RIT) measurements: determination of RTD values by a Location Measurement Unit (LMU)
Measures RTD relative to a selected base station clock (GSM/UMTS time), or
Measures RTD relative to GPS time (preferred and more accurate way, but requires GPS equipment)
Incoming signal bursts from surrounding base stations are timestamped and RTD values are calculated against a selected reference base station

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (IV)
1. SMLC requests LMU to perform RIT measurements for a particular set of base stations
2. LMU returns measured RTDs
3. SMLC requests terminal to measure OTDs (and optionally calculate its position) and passes assistance data to the terminal
4. Terminal sends measured OTDs and/or calculated position
Alternative for Steps 3 and 4:
Assistance data is periodically broadcast (maybe encrypted)
Terminal can carry out positioning autonomously (without explicit request from the SMLC)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (V)
Problem: RTDs derived by an LMU are actually observed RTDs, because they are subject to the propagation delay like OTDs
To get actual RTDs, remove time portions from the observed RTDs that is caused by the propagation delay
Exact coordinates of monitored base stations and LMU must be known in order to determine the distances between them

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (VI)
Mode of Operation
Terminal-based: terminal performs OTD measurements and calculates position
Terminal-assisted: terminal performs OTD measurements only and returns results to the SMLC for calculating the position in the network
Reference and neighbor base stations
Prescribe the pairs of base stations for which to measure OTDs
Measurement support data
RTD values for reference and neighbor base stations (in case of terminal-based mode)
Expected OTD: estimation of OTD by SMLC in order to speed up measurement process
Base station coordinates
Desired response time and accuracy
Maximum response time after which the terminal should have finished the measurements (terminal-assisted mode)
Minimum level of accuracy for position calculation (terminal-based mode)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningEnhanced Observed Time Difference (VII)
Explicit position request Requires dedicated point-to-
point signaling between terminal and SMLC
Autonomous position estimation by the terminal
Requires broadcast of assistance data

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningAssisted GPS (I)
Motivation
Reduce GPS sensor startup time
Increase accuracy by DGPS
Consume less handheld power than conventional GPS
Assumption
Network of GPS reference stations whose receivers have clear views to the sky and can operate continuously

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.3 Cellular PositioningAssisted GPS (II)
Mobile-assisted A-GPS Position calculation is done in the network
Network transmits short assistance data to the terminal GPS time Visible satellite list Doppler shift Code phase search window
Terminal performs measurements and returns results to the network for position estimation
Mobile-based A-GPS
Position calculation is done by the terminal
Network transmits extended assistance data to the terminal
GPS time
Reference location
Satellite ephemeris and clock corrections
D-GPS data

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.A Code Division Multiple Access Overview
All channels transmit simultaneously in the same frequency range
Signals of different channels are summedup during transmission and must beseparated from each other by code
Chipping sequence (or spreading code)
Sequence of chips unambiguously assigned to a channel
Must be known to sender and receiver
Data is encoded with the chipping sequence by multiplication
Receiver applies chipping sequence on the received added signal and derives the original data after integration
Chip
Value of +1 or -1 (in bipolar notation)
Much shorter than a bit

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.A Code Division Multiple Access Spreading and De-Spreading of Signals (I)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.A Code Division Multiple Access Spreading and De-Spreading of Signals (II)
Chip rate Cc is a multiple of the bit rate Cb
Data encoded with a chipping sequence is spread over a much larger frequency range compared to a signal derived from pure data (follows from the coherence between data rate and bandwidth)
CDM/CDMA is a spread spectrum technique
Spreading factor: relation between the chip and bit length (i.e., it defines the number of chips used for encoding a single bit)
Spread signal has the same amount of power as the despread signal, but this power is equally distributed over the much larger frequency band
Smaller amount of power per frequency (power spectral density)

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.A Code Division Multiple Access Autocorrelation and Cross-correlation (I)
Spreading codes must have good correlation properties in order to be suitable for CDM/CDMA
Correlation: measure for determining how much similarity one set of data has with another
Autocorrelation
Defines the correlation of a chip sequence ci of N chips with regard to n shifts of itself:
Important measure for achieving synchronization between sender and receiver
A chipping sequence has a good autocorrelation if
Receiver monitors the incoming signal and applies the autocorrelation function
If the result shows a peak, the beginning of the code is detected and sender and receiver aresynchronized

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.A Code Division Multiple Access Autocorrelation and Cross-correlation (II)
Cross-Correleation
Defines the correlation of two chip sequencesci and cj, both consisting of N chips, withregard to n shifts:
Low cross correlation betweendifferent chipping sequences isessential in order to properly separatethe different channels from the composedsignal at the receiver
The more similar a pair of chipping sequences is, the more difficult it is to reconstruct the original data
Orthogonality
Two chipping sequences show zero cross correlation
Only exists if unshifted versions of chipping sequences are matched
Problem in CDMA systems, where different senders are not synchronized and any combination of shifted sequences overlay during transmission
Autocorrelation of the same sequence

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular Lateration2D versus 3D
Circular lateration in 2D
Range ri between the ith base station:
with (Xi, Yi) being the known coordinates of the ith base station with respect to ECEF and (x,y) the target's unknown position
Circular lateration in 3D
Range ri between the ith base station:
with (Xi, Yi, Zi) being the known coordinates of the ith base station with respect to ECEF and (x,y,z) the target's unknown position

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular LaterationError Potential
Measured pseudoranges pi deviate from the actual ranges ri by an error due to inaccurate clock synchronization, refraction, and multipath propagation:
Consequence: circles (spheres) do not intersect at a certain point, but span an area of some size
System of equations is in most cases inconsistent and has no unique solution
To achieve a result different mathematical approaches can be used

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular LaterationPosition Calculation (I)
Approximation of the target's position by an iterative process of least square fits
Start with an estimation of the target's position
Calculate a correction vector that can be applied to the estimated position
Function of the pseudorange to the ith base station expressed by a Taylor series:
For calculating the position fix, only the first order expansion is determined:
Taylor series
Describe a function f at a certain point by a power series:
I: interval
a: inner point of I
f: function with derivatives up to the order of (n+1) on I
Rn(x,a): remainder after n+1 terms
x I

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular LaterationPosition Calculation (II)
Solution of the partial differentials:
Because the coordinates of the ith base station as well as the target's estimated position are known, the coefficients ai, bi, ci are numerically known, too:
corresponds to the pseudorange between the estimated position and the position of the respective base station and is therefore numerically known
System of linear equations:
with pi being the difference between this pseudorange and the observed pseudorange

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular LaterationPosition Calculation (III)
In matrix notation:
A: contains the partial differentials
b: deviation of the observed pseudorange from the range based on the estimated position
x: searched correction vector of the estimated position
In the best case, the system of equations has a unique solution, which can be obtained by calculating
Problem: in most cases, system of equations is overdetermined (more equations than unknowns) and is based estimations and inaccurate observations -> no unique solution exists
Solution: least square fit for approximating a solution
Idea of least square fit
Minimize the sum of the squares of the residual between the fitted function and the measurement data

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.B Circular LaterationPosition Calculation (IV)
Compose the squared Euclidian distance of the residual vector :
Condition of the least square fit: minimize the squared Euclidian distance of the residual vector
by building the derivative and setting it to zero:
Solving the following equations for yields the correction for the previously estimated position:
Correction is applied to the estimated position and linearization (Taylor Series) and least square fit are repeated
Iterative process stops if the calculated correction values fall below a predefined threshold

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.C Hyperbolic LaterationOverview
Hyperbolic lateration is based on range differences
Hyperbola
Set of all points for which the difference in the range to two fixed points is constant
Fixed points are denoted as foci and are given by a pair of two base stations
Observable: range difference between the target and a number of base stations
Target's position is given by the intersection of hyperbolas (in 2D) or hyperboloids (in 3D) defined by the range differences

Mo
bile
Ser
vice
s –
ST 2
01
0 |
9 P
osi
tio
nin
g A
xel K
üp
per
| T
ech
nis
che
Un
iver
sitä
t B
erlin
| S
ervi
ce-c
entr
ic N
etw
ork
ing
9.C Hyperbolic LaterationError Potential and Position Calculation
System of equations for hyperbolic lateration in 3D:
Error potential because of inaccurate determination of range differences:
Linearization of non-linear system of equations by using a Taylor series (see circular lateration)
Coefficients of the resulting design matrix:
with
Note: range differences are usually measured with regard to a selected reference base station, indicated here by i=1
Approximation of the solution by applying a least square fit (in analogy to circular lateration)