Embed Size (px)
Citation preview

Mobility performance and stress distribution generatedbeneath a wheel on loose soil for a wheeled rover
Shoya Higa†, Kenji Nagaoka†, and Kazuya Yoshida†† Tohoku University, [email protected]
Abstract
In an unmanned exploration rover for future lunar/planetary exploration, understanding ofthe stress distributions generated beneath its wheels is one of the key technologies for control andestimate of the rover’s traveling performance. Although some have addressed the measurementand modeling of the stress distributions so far, their application basically targets large andheavyweight vehicle such as construction machinery. Therefore, most of the past results cannot beapplicable to a small and lightweight rover. On the basis of this background, we have carried outthe laboratory tests to minutely measure the normal stress distribution beneath a driving wheelusing a high-accuracy force/torque sensor. The measurement results confirmed the relationshipbetween the soil stress distribution and the wheel’s traveling performance such as wheel slippageor sinkage. In this paper, we review such a complicated phenomenon between soil reactive stressesand wheeled mobility based on various experimental results.
月・惑星探査ローバーにおける軟弱地盤走行時の車輪下部の応力分布が走行性能に与える影響
比嘉 翔弥 ‡, 永岡 健司 ‡, 吉田 和哉 ‡
‡ 東北大学, [email protected]
摘 要
軟弱地盤上を走行する車輪型の月・惑星探査ロボットにおいて,走行中の車輪下部に発生する土壌からの応力分布と,車輪のスリップや沈下量などの走行性能との間には,力学的に複雑な相互作用が存在している.これまでにも,車輪下部の応力を計測する試みは実施されてきたが,比較的大型な建機などが対象であっため,その計測結果は小型軽量な探査ローバーには必ずしも合致しない,という点が課題として指摘されてきた.そこで,著者らは新たに力覚センサを用いた高精度な二次元垂直応力分布の計測を実施し,車輪下部応力分布の詳細な把握を実施してきた.本稿では,これまでに得られた応力分布計測の結果と,車輪の走行性能との相互関係について整理した成果について述べる.
Key Words: Lunar/Planetary rover, Stress distribution, Rigid wheel
1. Introduction
Lunar/planetary exploration robots (rovers) haveto traverse on fine granular soil called “regolith”. Suchloose soil induce wheel slippage easily. Wheel slippageprovides adverse effect to rover’s path following per-formance and makes it getting “stuck” in the worstcase. To prevent such situations, we have to under-stand the wheel-soil interaction.
The research field on the wheel–soil interaction iscalled “terramechanics”. Terramechanics originallytargets for heavyweight vehicles (e.g., constructionmachines, agricultural machines, or military vehicles).
Bekker first modeled pressure-sinkage relationship us-ing results of plate penetration tests [1]. Then, Reeceand Wong modified the relationship and applied tothe wheel [2], which was based on Onafeko’s stressmeasurement results [3]. The normal stress distribu-tion and the shear stress distribution are generated ata contact path between the soil, during the wheel rota-tion. Janosi and Hanamoto [4] modeled shear stress,using the normal stress and several terrain parame-ters, based on direct shear test. This allows to esti-mate the shear stress distribution generated at samearea as the normal stress distribution. Thus, the shearstress can be estimated if the normal stress distribu-

Contact area
Cover of F/T sensor
Five thin contact-parts
40–50 mm30–40 mm20–30 mm10–20 mm
00–10 mm
Distance from the wheel center
Offset force by four springs
Contact-part
F/T sensor
F/T sensor unit
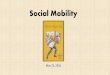
Fig. 1 The measurement device (a F/T Sensor + acontact-part).
tion can be known. Forces acting on the wheel, suchas the traction force, are calculated based on the nor-mal stress distribution and the shear stress distribu-tion of the wheel. The normal stress distribution is ofextreme importance, because the normal stress distri-bution allows to such estimates. Therefore, the stressdistributions on the wheel or tire surface have beenpreviously measured and modeled [5, 6].
In recent years, terramechanics has been applied forlightweight vehicles such as lunar/planetary rovers.However, recently, some researchers have pointed outthat the conventional model does not provide us rea-sonable results for lightweight vehicles. Therefore,stress distribution measurement of lightweight wheelswere conducted [7, 8, 9]. These results only measurethe stress distribution along with wheel circumferen-tial direction. But, in order to understand more detailphenomena of the soil beneath the wheel, we have tomeasure the stress distribution more minutely. There-fore,we measured the normal stress distribution two-dimensionally under several measurement conditions[10, 11].
In this paper, we marshal the measurement resultconducted until now and discuss about correlation be-tween the mobility performance and two-dimensionalnormal stress distribution.
2. Measurement device, environment,and method
The normal stress distribution beneath the wheelis important to estimate the force acting on a wheelminutely. Conventional stress distribution model as-sumes that the normal stress distribution beneath thewheel is generated uniformly in wheel width direction[3, 12]. However, in practice, the normal stress distri-bution beneath the wheel is not generated uniformly.Thus, we developed measurement device, which canmeasure the normal stress distribution at specific areain the wheel width direction[10, 11].
Fig. 2 Two-wheeled rover testbed.
2.1 Measurement deviceThe measurement device consisted of a 6-axis
force/torque (F/T) sensor and a contact-part whichcan touch the soil at specific measurement points, asshown in Fig. 1. We prepared five types of contact-parts. Each contact-part is a different shape to al-low for measurements at ten specific measurementpoints. Each distance from the center of the wheelis 0–10 mm, 10–20 mm, 20–30 mm, 30–40 mm, and40–50 mm. The contact area of each contact-part is2.4 mm× 10.4 mm. By using the five types of contact-parts, the stress distribution along with the wheel cir-cumferential direction can be measured at a total of10 positions. Moreover, four springs are attached tothe surface of the 6-axis F/T sensor to always gener-ate an offset force. Based on these mechanisms, thedead zone of the 6-axis F/T sensor is outside the mea-surement range.In this study, the measurement device is mounted
on the rear wheel of two-wheel rover test bed (Fig. 2).By using this unit, the stress distribution correspond-ing to the rotational angle of the wheel can be mea-sured by rotating the wheel on loose soil. We installedthe measurement device into the front or rear wheel ofthe testbed (Fig. 2). By using this device, the normalstress distribution at each wheel rotation angle canbe measured with wheel rotation on loose soil. Thewheel size of which is 250 mm in diameter, 100 mm inwidth. Table 1 shows the specifications of the rovertest bed.
2.2 Experimental environmentAs shown in Fig. 3, a sandbox, which is 1.6 m in
length, 0.3 m in width, and 0.2 m in height, is usedas a experimental environment. The sandbox is filled
TABLE 1 Specifications of Two-wheeled rover.Size [mm] L830 × W520 × H1190
Mass [kg] 9.6 or 14.8
Wheel size [mm] ϕ250 × W100

Lifting up using
a hydraulic jack.
𝛼𝑝
1.6 m0.3 m
0.2 m
Fig. 3 Experimental environment which simulatesclimbing motion.
Ball caster and aluminum guide plate restrict
roll angle of the two-wheeled rover.
Three jacks lift the sand box.
Two free angle brackets fix
the two-wheel rover’s attitude.
𝜶𝒓
Fig. 4 Experimental environment which simulateslateral slope traversal.
𝑥
y
z
𝛼𝑟
Σ𝑠
z
𝑥
yΣ𝑤
Fig. 5 Wheel attitude condition traversing sandyslope laterally.
with Toyoura standard sand, whose particle diametersare nearly homogeneous, and its cohesion is nearlyzero.
The sandy slope was up to approximately 20◦. Wecan simulate the wheel motion climbing on sandyslope by jacking up the side of traveling direction asshown in Fig. 3. And we can also simulate the wheeltraversing laterally by jacking up the side of the sand-box as shown in Fig. 4.
𝜃
𝜎
𝜎 𝜃
𝜃
𝜃
𝜎 𝜎
𝜎𝜃
𝜃
𝜎 𝜃
𝜃
𝜎 𝜃
𝜃
+・・・++・・・+
#1 #5 #10
#01 #10
𝑦
𝑧
F/T sensor
Fig. 6 A method for two-dimensional normal stressdistribution measurement.
In addition, in order to maintain the attitude of awheel, a 1-m-long pole, which two ball casters arefixed at the top, is mounted on the body of thetestbed. The attitude is supported by the ball castersand aluminum guide plate. Note that this guide platecan be fixed at any tilt angle so as to not disrupt theslip angle of the rover as shown in Fig. 5. Thus, itis possible to measure the normal stress distributiongenerated beneath a wheel with a constant attitudeof the testbed.
2.3 Measurement methodIn order to clarify the stress distribution circum-
stantially, we presented a measurement method whichmeasures the normal stress two-dimensionally (wheelcircumferential direction and wheel width direction)as shown in Fig. 6 [10, 11].
(1) Set a contact-part which can measure the normalstress distribution at #01.
(2) Install the measurement device in the front orrear wheel of the two-wheeled rover.
(3) Cultivate the soil and make the soil smooth.(4) Run the two-wheeled rover on the loose soil and
measure the normal stress distribution along withthe wheel circumferential direction.
(5) Repeat procedures (3)–(4) three times.(6) Replace a contact-part at each measurement
point and repeat procedures (2)–(5) up to #10.(7) Superimpose 10 normal stress distributions and
obtain the two-dimensional stress distribution.
3. Measurement results and discussionsIn this section, we discuss the mobility performance
of the wheel from the viewpoint of two-dimensionalnormal stress distributions.As a key parameter, we introduce slip ratio s as
follows.
s =rω − vx
rω(1)
3.1 Traveling on flat loose terrain with differ-ent weights
Fig. 7 shows part of the measurement results of two-dimensional normal stress distribution of a wheel trav-eling on flat loose terrain under different rover weightscondition [11].We confirmed that the peak of the normal stress
distribution along with the circumferential directionof the wheel was generated at the front part of the

−10 0 10 20 300
10
20
30
40
50
Wheel Angle θ [◦]
Norm
alStressσ[kPa]
!
!
−45mm−35mm−25mm−15mm−5mm5mm15mm25mm35mm45mm
−100102030
01020304050
!
453525155−5
Position y [mm]−15
−25
−35
−45θ [◦]
!
Norm
alStressσ[kPa]
Norm
alStressσ[kPa]
0
20
40
60
0
10
20
30
40
50
Position y [mm]
Norm
alStressσ[kPa]
!
!
−45−35−25−15 −5 5 15 25 35 45
θ = 3◦θ = 6◦θ = 9◦θ = 12◦θ = 15◦θ = 18◦
(a) m = 9.6 kg
−10 0 10 20 300
10
20
30
40
50
Wheel Angle θ [◦]
Norm
alStressσ[kPa]
!
!
−45mm−35mm−25mm−15mm−5mm5mm15mm25mm35mm45mm
−100102030
01020304050
!
453525155−5Position y [mm]−1
5−25
−35
−45θ [◦]
!
Norm
alStressσ[kPa]
Norm
alStressσ[kPa]
0
20
40
60
0
10
20
30
40
50
Position y [mm]
Norm
alStressσ[kPa]
!
!
−45−35−25−15 −5 5 15 25 35 45
θ = 3◦θ = 6◦θ = 9◦θ = 12◦θ = 15◦θ = 18◦
(b) m = 14.8 kg
Fig. 7 Measurement results of a wheel traveling on flat loose terrain [11].
wheel (θ > 0◦); the peak of the normal stress distri-bution in the wheel width direction was generated atthe center of the wheel. Moreover, we confirmed thatthe peak of the normal stress distribution is propor-tional with the wheel weight and the slip ratio wasalmost 0%.
3.2 Climbing on sandy slopeFig. 8 shows part of the measurement results of two-
dimensional normal stress distribution under condi-tion of different inclination angles of sandy slope [11].As shown in the left column of Fig. 8, the peak of
the normal stress distribution decreased with increasein the slope inclination angle and wheel slippage; but,the entry angle increased. On the other hand, thenormal stress distribution in the wheel width directionwas also generated as mountain shape under conditionof low inclination angle and low slippage, as same asthe result which the rover travels on flat loose terrainunder same weight (Fig. 7 (a)); however, this becamenearly flat distribution with increase in the wheel slip-page.
3.3 Traversing on sandy slopes laterallyFig. 9 shows the measurement results for the two-
dimensional stress distribution of a wheel traversing aslope laterally [10]. In this result, the wheel slippagewas almost zero.The normal stress distribution was varied at each
measurement point because we were unable to mea-sure 10 normal stress distributions in the wheel widthdirection simultaneously in this study. From the leftcolumn of Fig. 9, we confirmed that the generating
area of the normal stress distribution became wide.
In addition, the peak of the normal stress distri-bution in the wheel width direction was shifted to-ward slope direction. This was marked with increasein slope inclination; but, the peak value of the nor-mal stress distribution was almost same as the re-sult which the rover travels on flat terrain under sameweight condition (Fig. 7 (b)).
4. DiscussionsFrom the measurement result mentioned in the pre-
vious section, we can see that the normal stress distri-bution generated beneath the wheel is affected fromthe wheel weights and terrain condition that wheeltravels. In this paper, we discuss the entry angle, theexit angle, and the peak position.
We can estimate the entry angle and peak positionfrom the two-dimensional normal stress distributionof a wheel. The entry angle corresponds approxi-mately to rising angle of the normal stress distribu-tion. Thus, we can estimate the wheel sinkage fromthe entry angles. Note that the basis of the wheelrotation angle is normal to the soil surface, and theentry angle excludes the slope inclination angle.
On the other hand, the peak position of the normalstress shows interesting results. The peak position inthe wheel width direction varies with traveling terrainand wheel slippage. This implies that detecting thepeak of the normal stress provides the terrain infor-mation. For instance, if the peak position shifted toedge side of the wheel from the center of the wheel,the wheel easily side-slips to the opposite edge direc-

−10 0 10 20 300
10
20
30
40
50
Wheel Angle θ [◦]
Norm
alStressσ[kPa]
!
!
−45mm−35mm−25mm−15mm−5mm5mm15mm25mm35mm45mm
−100102030
01020304050
!
453525155−5
Position y [mm]−15
−25
−35
−45θ [◦]
!
Norm
alStressσ[kPa]
Norm
alStressσ[kPa]
0
20
40
60
0
10
20
30
40
50
Position y [mm]
Norm
alStressσ[kPa]
!
!
−45−35−25−15 −5 5 15 25 35 45
θ = 3◦θ = 6◦θ = 9◦θ = 12◦θ = 15◦θ = 18◦
(a) m = 9.6 kg, αp = 9◦, s = 14%
−10 0 10 20 300
10
20
30
40
50
Wheel Angle θ [◦]
Norm
alStressσ[kPa]
!
!
−45mm−35mm−25mm−15mm−5mm5mm15mm25mm35mm45mm
−100102030
01020304050
!
453525155−5Position y [mm]−1
5−25
−35
−45θ [◦]
!
Norm
alStressσ[kPa]
Norm
alStressσ[kPa]
0
20
40
60
0
10
20
30
40
50
Position y [mm]
Norm
alStressσ[kPa]
!
!
−45−35−25−15 −5 5 15 25 35 45
θ = 3◦θ = 6◦θ = 9◦θ = 12◦θ = 15◦θ = 18◦
(b) m = 9.6 kg, αp = 12◦, s = 44%
−10 0 10 20 300
10
20
30
40
50
Wheel Angle θ [◦]
Norm
alStressσ[kPa]
!
!
−45mm−35mm−25mm−15mm−5mm5mm15mm25mm35mm45mm
−100102030
01020304050
!
453525155−5
Position y [mm]−15
−25
−35
−45θ [◦]
!
Norm
alStressσ[kPa]
Norm
alStressσ[kPa]
0
20
40
60
0
10
20
30
40
50
Position y [mm]
Norm
alStressσ[kPa]
!
!
−45−35−25−15 −5 5 15 25 35 45
θ = 3◦θ = 6◦θ = 9◦θ = 12◦θ = 15◦θ = 18◦
(c) m = 9.6 kg, αp = 15◦, s = 85%
Fig. 8 Measurement results of a wheel climbing over sandy slopes [11].
tion. If the peak position is shifted to traveling direc-tion with increase in the entry angle and decrease thepeak value, the wheel slippage in traveling directionbecomes large.
From the viewpoint of the peak value of the normalstress distribution, the peak value of the normal stressdistribution also provides a trend of wheel slippage.In case that the peak value of the normal stress dis-tribution decreased, the wheel sinkage became largethen the wheel slippage became large.
From the above, we can estimate the mobility per-formance tendency from the normal stress distribu-tion.
5. ConclusionsIn this paper, we showed several measurement re-
sults of two-dimensional normal stress distribution ofa wheel. The normal stress distribution shows someinformation about traveling terrain and mobility per-formance as follows:
• The entry angle provides wheel sinkage and in-clination of traveling terrain.
• The peak position of the normal stress distribu-tion also provides terrain inclination.
• The peak value of the normal stress distributionshows the trend of the wheel slippage.
From the above, in case that the increase in the en-try angle and decrease in the peak value of the normalstress occurs simultaneously, we can consider that therisk of getting stuck increase rapidly.
References
[1] M. G. Bekker, Theory of Land Locomotion. AnnArbor, MI: University of Michigan Press, 1956.
[2] J. Y. Wong and A. R. Reece, “Prediction ofrigid wheel performance based on the analy-sis of soil-wheel stresses part I. Performance ofdriven rigid wheels,” Journal of Terramechanics,vol. 4, no. 1, pp. 81–98, jan 1967. [Online].

(a) Slope angle αr = 10◦, m = 14.8 kg
(b) Slope angle αr = 20◦, m = 14.8 kg
Fig. 9 Measurement results of a wheel traversing a sandy slope laterally[10].
Available: http://linkinghub.elsevier.com/retrieve/pii/002248986790105X
[3] O. Onafeko and A. R. Reece, “Soil stresses and defor-mations beneath rigid wheels,” Journal of Terrame-chanics, vol. 4, no. 1, pp. 59–80, Jan. 1967.
[4] Z. Janosi and B. Hanamoto, “The analytical determi-nation of drawbar pull as a function of slip for trackedvehicles in deformable soils,” in Proceedings of the 1stInternational Conference on Terrain-Vehicle Systems,Turin, Italy, 1961, pp. 707–736.
[5] G. Krick, “Radial and shear stress distribution be-neath rigid wheels and pneumatic tyres on yieldingsoils with regard to tyre deformation,” Journal of Ter-ramechanics, vol. 6, no. 3, pp. 73 – 98, 1969.
[6] A. Oida, A. Satoh, H. Itoh, and K. Triratanasirichai,“Three-dimensional stress distributions on a tire-sandcontact surface,” Journal of terramechanics, vol. 28,no. 4, pp. 319–330, 1991.
[7] K. Nagatani, A. Ikeda, K. Sato, and K. Yoshida,“Accurate estimation of drawbar pull of wheeled mo-bile robots traversing sandy terrain using built-inforce sensor array wheel,” in Proceedings of the 2009IEEE/RSJ International Conference on IntelligentRobots and Systems, St. Louis, MO, USA, Oct. 2009,pp. 2373–2378.
[8] C. Senatore and K. Iagnemma, “Analysis of stress dis-tributions under lightweight wheeled vehicles,” Jour-nal of Terramechanics, vol. 51, pp. 1–17, Feb. 2014.
[9] T. Shirai and G. Ishigami, “Accurate Estimation ofWheel Pressure-Sinkage Traits on Sandy Terrain us-ing In-Wheel Sensor System,” in Proceedings of the12th International Symposium on Artificial Intelli-gence, Robotics and Automation in Space (i-SAIRAS2014), 2014, pp. Session 8a–3.
[10] S. Higa, K. Nagaoka, K. Nagatani, andK. Yoshida, “Measurement method for two-dimensional normal stress distribution of wheelson lateral loose soil slopes,” in Proceedings ofthe 2014 IEEE/SICE International Symposium onSystem Integration, 2014, pp. 603–608. [Online].Available: http://ieeexplore.ieee.org/lpdocs/epic03/wrapper.htm?arnumber=7028107
[11] S. Higa, K. Nagaoka, K. Nagatani, and K. Yoshida,“Measurement and modeling for two-dimensionalnormal stress distribution of wheel on loose soil,”Journal of Terramechanics, vol. 62, pp. 1–11, 2015.[Online]. Available: http://www.sciencedirect.com/science/article/pii/S002248981500035X
[12] J. Y. Wong, Theory of Ground Vehicles, 4th ed.Hoboken, New Jersey: John Wiley & Sons, Inc., 2008.