Embed Size (px)
Citation preview

MOBY DICTOOLBOX
MOBY-DIC WORKSHOP
Noordwijkerhout, 23-08-2012

DESCRIPTION
C / C++ compiler
Object oriented programming
HTML Documentation
Multi Parametric Toolbox (MPT)
MATLAB R2008a or newer
Requirements:
Hybrid Toolbox
Main features:
Graphical User Interface
MATLAB / SIMULINK
GPL v2 license (open source)
http://ncas.dibe.unige.it/software/MOBY-DIC_Toolbox/
Yalmip
MATLAB R2011a and Xilinx System Generator (only for HDL simulation)

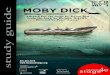
CONTROL/CIRCUIT CO-DESIGN
PLANT
EMBEDDEDCONTROLLER
FastSmall
Low-powerLow-cost

GOAL OF THE TOOLBOX (1)
Control/circuit co-design
CONTROL SPECS.
CIRCUIT SPECS.
LINEAR SYSTEM CONSTRAINTS
DIGITAL CIRCUIT
FPGA/ASIC IMPLEMENTATION
CLOSED-LOOP SIMULATION

CONTROL DESIGN
@linearSystem objectLINEAR SYSTEM CONSTRAINTS
@constraints object
CONTROL SPECS. GENERATE MPC
PWAG
generateMPC function
Calls Hybrid Toolbox or Multi Parametric Toolbox to compute explicit MPC control law
@pwag object
Piecewise Affine function defined over generic polytopic partition

CIRCUIT DESIGN
synthesize method
Generates VHDL files for the circuit implementation of exact MPC controller. More solutions are available, the choice is performed based on circuit specifications
CIRCUIT SPECS. synthesize
VHDL files
getCircuitPerformances
PWAG
Latency, multipliers,
memory occup.
getCircuitPerformances
Gets information about circuit performances in advance.

CONTROL APPROXIMATIONpwasApproximation
Approximates the PWAG controller with a Piece-Wise Affine function defined over a simplicial partition, by imposing constraints.
LINEAR SYSTEM CONSTRAINTS
APPROXIMATE
PWAS / PWAR
PWAG
pwarApproximation
Approximates the PWAG controller with a Piece-Wise Affine function defined over a rectangular partition, by imposing constraints.

APPROXIMATION BENEFITS
Regularity of the partition
Fast circuit computation
Stability can be proven (a posteriori)
PWAG/PWAS/PWAR STABILITY TEST

CIRCUIT DESIGN
synthesize method
Generates VHDL files for the circuit implementation of approximate MPC controller.
CIRCUIT SPECS. synthesize
VHDL files
getCircuitPerformances
PWAS/PWAR
Latency, multipliers,
memory occup.
getCircuitPerformances
Gets information about circuit performances in advance, also before generating the approximate control function itself.

CLOSED-LOOP SIMULATION
generateSimulinkModel
Generates a Simulink model of the closed-loop system, in which the control is computed by simulating the VHDL files (delays and fixed point representation effects are taken into account)
Requires Xilinx System Generator
VHDL files
PLANT PWAG / PWAS / PWAR
GENERATE SIMULINK
MODEL

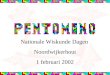
VIRTUAL SENSOR DESIGN
PLANTInputs u
Unmeasurable output z
Measurable outputs y
VIRTUAL SENSOR
Estimated unmeasurable output z
FastSmall
Low-powerLow-cost

VIRTUAL SENSOR THEORY

GOAL OF THE TOOLBOX (2)
Virtual sensors design
SENSOR SPECS.
CIRCUIT SPECS.
DATASET
DIGITAL CIRCUIT
FPGA/ASIC IMPLEMENTATION VALIDATION

VIRTUAL SENSOR DESIGN
identify
Identify a PWAS virtual sensor starting from measures of u, y and z
TRAINING DATASET
SENSOR SPECS. IDENTIFY
VIRTUAL SENSOR
The estimation of z is performed by computing the value of a PWAS function of u, y and the estimated z at previous time instants

VIRTUAL SENSOR VALIDATION
validate
Validates the virtual sensor on a test set to see if the estimation is accurate
TEST DATASET VALIDATE
VIRTUAL SENSOR

VIRTUAL SENSOR CIRCUIT
VIRTUAL SENSOR
CIRCUIT SPECS.
VHDL files
synthesize
synthesize method
Generates VHDL files for the circuit implementation of PWAS virtual sensor.
More solutions are available, the choice is performed based on circuit specifications