Embed Size (px)
Citation preview

INSTITUTO TECNOLOGICO Y DE ESTUDIOSSUPERIORES DE MONTERREY
CAMPUS MONTERREY
MODEL-BASED CONTROL ALGORITHMS FOR ASECURE INTEGRATION OF DISTRIBUTED
GENERATION INTO MICROGRIDS
A DISSERTATION PRESENTED BY
LUIS ISMAEL MINCHALA AVILA
SUBMITTED TO THESCHOOL OF ENGINEERING AND SCIENCES
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
DOCTOR OF PHILOSOPHYIN
ENGINEERING SCIENCEMAJOR IN MECHATRONICS
MONTERREY, NUEVO LEON, MEXICO, DECEMBER 2014

ii

INSTITUTO TECNOLOGICO Y DE ESTUDIOSSUPERIORES DE MONTERREY
CAMPUS MONTERREY
The committee members hereby recommend the thesis presented by Luis IsmaelMinchala Avila to be accepted as a partial fulfillment of the requirements for thedegree of Doctor of Philosophy in Engineering Science.
——————————————————–Dr. Luis Eduardo Garza Castanon
Thesis AdvisorITESM, Campus Monterrey, Mexico
——————————————————–Dr. Youmin ZhangThesis Co-Advisor
Concordia University, Canada
——————————————————–Dr. Hector J. Altuve Ferrer
Thesis Co-AdvisorSchweitzer Engineering Laboratories, Inc.
——————————————————–Dra. Adriana Vargas Martınez
Committee MemberITESM, Campus Monterrey, Mexico
——————————————————–Dr. Rogelio Soto
Committee MemberITESM, Campus Monterrey, Mexico
——————————————————–Dr. Neale Smith CornejoDCI Program Director
ITESM, Campus Monterrey, Mexico
iii

Declaration of Authorship
I, Luis Ismael Minchala Avila, declare that this dissertation titled, “MODEL-BASED CONTROL ALGORITHMS FOR A SECURE INTEGRATION OF DISTRI-BUTED GENERATION INTO MICROGRIDS” and the work presented in it are myown. I confirm that:
• This work was done wholly or mainly while in candidature for a research degreeat this University.
• Where any part of this dissertation has previously been submitted for a degree orany other qualification at this University or any other institution, this has beenclearly stated.
• Where I have consulted the published work of others, this is always clearly at-tributed.
• Where I have quoted from the work of others, the source is always given. Withthe exception of such quotations, this dissertation is entirely my own work.
• I have acknowledged all main sources of help.
• Where the dissertation is based on work done by myself jointly with others, Ihave made clear exactly what was done by others and what I have contributedmyself.
——————————————————–Luis Ismael Minchala Avila
Monterrey Nuevo Leon, December 2014
c©2014 by Luis Ismael Minchala AvilaAll Rights reserved
iv

Acknowledgements
Dr. Luis E. Garza Castanon
I would like to thank my advisor, Dr. Luis E. Garza Castanon, for his many yearsof thoughtful, patient guidance and support; his scholarly advice, help and constantencouragement contributed significantly to the completion of this research work.
General acknowledgements
I wish to thank my thesis committee members for their critical input for my study.
I would like to thank the endearing friends I made in Mexico: Ruben Marban(grillo), Jorge Claros, Cesar Cantu, Rafael Mendoza, Violeta Casillas, Kike Cuan,Veronica Adame, Jonnatan Aviles, Sonia Aviles, Marco Lazo, Jorge Rosero, AngeloRaimondi, Alberto Garza, Jhony Calderon, Cristian Zamora, Paola Penaherrera, LolaBermeo and Camila Castro.
I also wish to thank to those who made my research stay in Canada a wonder-ful experience: Alberto Rivera (compadre), Carlos Naranjo (Carlinos), Monica Wake,Gabriel Astudillo, Johanna Barzallo, Adriana Vargas, Cesar Lujan, Bin Yu, HamedBadihi, Javad Soltani and Zhuang Liu.
v

External Advisors Acknowledgements
Dr. Youmin Zhang
I would like to thank Professor Youmin Zhang for hosting me as visiting researcherduring my stay at Concordia University in Montreal, Canada. The research group atConcordia under the guidance of Professor Zhang greatly cooperated with my work,which allowed better results in my thesis.
Dr. Hector J. Altuve
I would like to thank Dr. Hector J. Altuve for his patience, kindness, advices,and constant encouragement in this research process. Undoubtedly, his contributiongreatly improved the thesis work.
vi

Dedication
I dedicate my dissertation work to my family. A special feeling of gratitude to myloving parents, Luis and Juana whose words of encouragement and push for tenacityrang in my ears. My brothers and sister, Chris, Juan, and Camila have never left my
side and are very special.
I also dedicate this dissertation to Peter+ for the footprint of joy he left in our family.
vii

MODEL-BASED CONTROL ALGORITHMS FOR ASECURE INTEGRATION OF DISTRIBUTED
GENERATION INTO MICROGRIDS
byLUIS ISMAEL MINCHALA AVILA
Abstract
The prosperity of smart grids related technology nowadays at industrial and sci-entific/academic levels is noticeable and undoubtedly the topic is a hot spot in researchand development. The technology that demands immediate attention due to the adventof energy shortage problems is microgrids technology, since it constitutes a feasible solu-tion to these problems. Microgrids operation lack of well-established standards and theneed for their development has fostered significant research and development activitiesin this field.
This thesis focuses in the design and development of model-based and optimal,non-classic control algorithms, to be applied in the operation of microgrids. The aimof these control strategies is to guarantee a secure operation of microgrids when theyoperate in islanded mode. The thesis studies problems related with frequency and volt-age regulation of microgrid generation units, as well as optimal load shedding decisionsfor balancing local power generation and load.
A centralized control algorithm is implemented in a simulation platform generatedin Simulink for ensuring a secure islanded microgrid operation when power systemstability may be affected by imbalances between generation and load. A nonlinearmodel predictive control (NMPC) algorithm is selected for processing measurementsof the batteries state of charge, the renewable energy sources active power generation,and the forecasted load. The algorithm predicts the microgrid response of selectedstate variables, which are used to identify upcoming active power unbalances and toinitiate automated load shedding applied to non-critical loads. The control strategyguarantees a stable microgrid operation, while covering prioritized load demand. Thecontrol strategy is tested in a medium voltage distribution system with distributedgeneration (DG) units modeled in a simulation environment developed in MATLAB.
A hierarchical control strategy is designed, which lower layer is fulfilled with dis-tributed controllers to control DG. Two model-based distributed controllers were de-signed to control the DG units: a model predictive control (MPC) and a model referenceadaptive control (MRAC). Fault-tolerant control (FTC) techniques were used for de-signing an adequate control strategy to integrate a diesel engine generator (DEG) asthe master generation unit controlling voltage and frequency, in an islanded microgrid.
The control algorithms developed in this research project are tested and comparedwith classic control techniques and open-loop operating conditions in order to evaluatethe performance improvement achieved with the use of these control strategies, whichincrease microgrid reliability by maintaining the balance between generation and load,and by providing fault-tolerant microgrid operation.
viii

Contents
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xvii
1 Introduction 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Problem statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Literature review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.5 Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Theoretical framework 132.1 Power flow analysis in electric power systems . . . . . . . . . . . . . . . 13
2.1.1 Node equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.1.2 Power flow analysis equations . . . . . . . . . . . . . . . . . . . 14
2.2 Distribution systems fundamentals . . . . . . . . . . . . . . . . . . . . 152.2.1 Distribution substations . . . . . . . . . . . . . . . . . . . . . . 162.2.2 Feeders . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.2.3 Distribution system protective devices . . . . . . . . . . . . . . 17
2.3 Smart grids overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3.1 Distributed generation . . . . . . . . . . . . . . . . . . . . . . . 192.3.2 Microgrids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.3.3 Microgrid control . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.4 Distributed automation and control . . . . . . . . . . . . . . . . 222.3.5 Advanced metering infrastructure . . . . . . . . . . . . . . . . . 22
2.4 Optimal Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.1 Optimization without constraints . . . . . . . . . . . . . . . . . 242.4.2 Optimization with constraints . . . . . . . . . . . . . . . . . . . 242.4.3 Dynamic programming . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Model-based controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.5.1 Model predictive control . . . . . . . . . . . . . . . . . . . . . . 272.5.2 Nonlinear model predictive control . . . . . . . . . . . . . . . . 302.5.3 Model reference adaptive control . . . . . . . . . . . . . . . . . 32
2.6 Fault-tolerant control . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
ix

3 Microgrid modeling 413.1 DG units modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.2 Power electronic converters . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.2.1 Three-phase rectifier . . . . . . . . . . . . . . . . . . . . . . . . 443.2.2 dc/dc power converters . . . . . . . . . . . . . . . . . . . . . . . 453.2.3 Voltage source inverter . . . . . . . . . . . . . . . . . . . . . . . 47
3.3 Diesel engine generator . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.3.1 Synchronous machine model . . . . . . . . . . . . . . . . . . . . 513.3.2 Diesel engine model . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.4 Wind-driven generation system . . . . . . . . . . . . . . . . . . . . . . 573.4.1 Wind turbine model . . . . . . . . . . . . . . . . . . . . . . . . 583.4.2 Induction generator model . . . . . . . . . . . . . . . . . . . . . 583.4.3 WEGS simulation . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.5 Photovoltaic generation system . . . . . . . . . . . . . . . . . . . . . . 633.6 Battery system modelation . . . . . . . . . . . . . . . . . . . . . . . . . 643.7 Microgrid benchmark model . . . . . . . . . . . . . . . . . . . . . . . . 67
3.7.1 Main characteristics of the benchmark model . . . . . . . . . . . 693.7.2 Simulation results of the benchmark model . . . . . . . . . . . . 72
4 Fault-tolerant control of a master generation unit in a microgrid 744.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.2 Controllers design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.2.1 MPC design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.2.2 MRAC design . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 864.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5 A predictive energy management strategy for guaranteeing stable ope-ration of an islanded microgrid 935.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.2 Description of the simulation scenario . . . . . . . . . . . . . . . . . . . 945.3 Controller design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 975.4 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.5 Integration of the MGCC with the DCs . . . . . . . . . . . . . . . . . . 1065.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6 Conclusions and future work 1096.1 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.1.1 Modeling of the microgrid components and integration into abenchmark model . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.1.2 Model-based controllers for guaranteeing optimal integration ofa DEG as a master generation unit in a microgrid . . . . . . . . 109
6.1.3 An MGCC scheme using NMPC . . . . . . . . . . . . . . . . . . 1106.2 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
x

6.2.1 Main contributions of the thesis . . . . . . . . . . . . . . . . . . 1116.2.2 Limitations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
6.3 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1136.3.1 Exploit the microgrid benchmark model as a virtual testbed . . 1136.3.2 Develop centralized control concepts for controlling systems with
complex architectures . . . . . . . . . . . . . . . . . . . . . . . . 1136.3.3 Develop fault detection techniques in the components of the mi-
crogrid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
A Microgrid modeling with Homer Energy 130A.1 Input requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130A.2 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
B An intelligent control approach for designing a low voltage dc breaker135B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135B.2 Transient analysis in a dc transmission line . . . . . . . . . . . . . . . . 136B.3 ILVDCB design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
B.3.1 Power Electronics Design . . . . . . . . . . . . . . . . . . . . . . 139B.3.2 Controller design . . . . . . . . . . . . . . . . . . . . . . . . . . 140
B.4 Performance analysis of the designs . . . . . . . . . . . . . . . . . . . . 143B.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
C Technical papers related to the thesis 145
xi

List of Tables
1.1 List of some major blackouts [1] . . . . . . . . . . . . . . . . . . . . . 21.2 Brief summary of literature review on distribution systems planning . 61.3 Brief summary of literature review on distribution automation systems 7
2.1 Typical secondary distribution voltages [2] . . . . . . . . . . . . . . . . 162.2 Comparison between microgrids and BPS . . . . . . . . . . . . . . . . 20
3.1 System parameters of a typical DE . . . . . . . . . . . . . . . . . . . . 563.2 Outstanding designs of WTG of leading manufacturers . . . . . . . . . 613.3 Load parameters of the benchmark microgrid model . . . . . . . . . . 693.4 Transmission lines parameters . . . . . . . . . . . . . . . . . . . . . . . 713.5 Initial parameters for power flow calculation of the microgrid benchmark
model (pu) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.1 (left) Parameters used in MATLAB Optimization Toolbox. (right) Op-timized PID gains using GA pattern search . . . . . . . . . . . . . . . 83
4.2 Parameter values of the LPV system . . . . . . . . . . . . . . . . . . . 854.3 Hybrid wind-diesel system parameters . . . . . . . . . . . . . . . . . . 874.4 Simulated fault scenarios for testing the MRAC-LVP controller . . . . . 894.5 Comparison of the main characteristics of the controllers . . . . . . . . 91
5.1 Control vector correspondence with loads and BSS . . . . . . . . . . . 98
A.1 Input parameters for designing the microgrid . . . . . . . . . . . . . . 131A.2 Hybrid system architecture . . . . . . . . . . . . . . . . . . . . . . . . . 132A.3 Hybrid system electrical parameters . . . . . . . . . . . . . . . . . . . . 132A.4 PV optimization results . . . . . . . . . . . . . . . . . . . . . . . . . . 132A.5 AC Wind Turbine: GE 1.5sl optimization results . . . . . . . . . . . . . 133A.6 Generator (diesel) optimization results . . . . . . . . . . . . . . . . . . 133A.7 Battery optimization results . . . . . . . . . . . . . . . . . . . . . . . . 134A.8 Emissions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
B.1 Set of rules used in the KBFC. . . . . . . . . . . . . . . . . . . . . . . . 141B.2 Performance Comparison of the Control Algorithms . . . . . . . . . . 144
xii

List of Figures
1.1 Hierarchical control scheme for power systems . . . . . . . . . . . . . . 81.2 Classification of optimal control techniques for microgrids control . . . 9
2.1 Main components of an electric power system . . . . . . . . . . . . . . 152.2 Traditional medium-voltage distribution system . . . . . . . . . . . . . 152.3 Distribution system with DG . . . . . . . . . . . . . . . . . . . . . . . 162.4 SGs vision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.5 DG overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.6 Example of an energy dispatch strategy for a microgrid . . . . . . . . . 202.7 Microgrid control and management system architecture . . . . . . . . . 212.8 Remote management system for electricity measurement . . . . . . . . 232.9 Concept of receding horizon strategy [3] . . . . . . . . . . . . . . . . . 282.10 MRAC structure [4] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.11 A general structure of an AFTCS [5] . . . . . . . . . . . . . . . . . . . 352.12 Classification of FDD methods [5] . . . . . . . . . . . . . . . . . . . . . 37
3.1 DG unit block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.2 Nonlinear circuit coupling block diagram . . . . . . . . . . . . . . . . . 433.3 Circuit coupling block diagram with frequency stability . . . . . . . . . 433.4 Frequency response of the model (3.4) for various values of Rd . . . . . 443.5 Three-phase controlled rectifier . . . . . . . . . . . . . . . . . . . . . . 453.6 (a) Rectifier output voltage; (b) Rectifier voltage dependence on α . . . 463.7 Dc-to-dc converters: (a) buck; (b) boost; and (c) buck-boost . . . . . . 473.8 Bridge type IGBT voltage source inverter . . . . . . . . . . . . . . . . . 483.9 Inverter voltage and current output: (a) Leading power factor; (b) Lag-
ging power factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.10 Voltage space vector locations corresponding to different switching states 513.11 Schematic diagram of a synchronous machine . . . . . . . . . . . . . . 523.12 Coupled windings of a synchronous machine . . . . . . . . . . . . . . . 533.13 Classic diesel engine block diagram [6] . . . . . . . . . . . . . . . . . . 553.14 Simulink block diagram for a synchronous generator with a diesel engine
as prime mover . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 563.15 (a) Synchronous generator frequency; (b) Synchronous generator voltage
output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.16 (a) Cp of the WT for differente β; (b) Tm characteristic curves for β = 0 59
xiii

3.17 Step response of the induction machine modeled with Eqs. (3.53) -(3.56). (a) Stator current; (b) Rotor current; and (c) Rotor speed . . . 60
3.18 Simulink block diagram of a WEGS . . . . . . . . . . . . . . . . . . . . 613.19 (a) Tm of the WT; (b) β response of the WT . . . . . . . . . . . . . . . 623.20 Single-diode PV model . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.21 PV array electrical characteristics. (a) I-V curve; (b) P-V curve . . . . 653.22 Nonlinear lead-acid battery equivalent circuit . . . . . . . . . . . . . . 663.23 Battery discharging process simulation. (a) Battery voltage; (b) State
of charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.24 Microgrid MV benchmark model CIGRE TF C6.04.02 . . . . . . . . . 683.25 Load profiles of the microgrid benchmark model . . . . . . . . . . . . . 703.26 Voltage profiles of nodes during the simulation: (a) Voltage magnitude
at Node 1; (b) Voltage magnitude at Node 9 . . . . . . . . . . . . . . . 733.27 Generated power from the DG units: (a) Power generated by the DEG;
(b) Power generated by the WTG; (c) Power generated by the PV array 73
4.1 Hybrid wind-diesel-photovoltaic power system architecture with BSS . 774.2 Fault-tolerant MPC structure for the DEG control . . . . . . . . . . . . 794.3 FDD module dynamic response: (a) residual generator response; (b) DE
ARX model estimation with KF (dashed lines represent true values ofthe ARX model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.4 FDD module operation cycle . . . . . . . . . . . . . . . . . . . . . . . . 824.5 MRAC-PID control structure for regulating DE speed . . . . . . . . . . 834.6 MRAC scheme for voltage regulation. . . . . . . . . . . . . . . . . . . . 844.7 The proposed MRAC-LPV-PID control structure for regulating DE speed 864.8 (a) Wind velocity profile usend in the simulation; (b) Solar ratiation
profile used used in the simulation . . . . . . . . . . . . . . . . . . . . . 884.9 Simulation events for the IEEE-1+PI, MPC, FTMCP and MRAC-PID
controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 884.10 Comparison of the DE voltage magnitude for: (a) the MPC and PID;
(b) the FTMPC and MRAC-PID. Comparison of the DE speed responsefor: (c) the MPC and PID; (d) the FTMPC and MRAC-PID. . . . . . 89
4.11 Power generated by RES: (a) DEG; (b) PV array; (c) WTG; (d) BSS.Control signals for: (e) the DE speed control; and (f) voltage amplitudeof the synchronous generator. . . . . . . . . . . . . . . . . . . . . . . . 90
4.12 MRAC-LPV scheme simulation results . . . . . . . . . . . . . . . . . . 92
5.1 Load profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 955.2 NMPC architecture for a centralized load shedding strategy . . . . . . 995.3 Load-1 prediction using ANN . . . . . . . . . . . . . . . . . . . . . . . 1005.4 PDE ANFIS model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1015.5 Profiles of wind velocity and solar radiation used in the simulation . . . 1035.6 Performance comparison of the NMPC with different model approaches
(batteries in the charge-discharge mode) . . . . . . . . . . . . . . . . . 103
xiv

5.7 PDE output signal when the load shedding NMPC strategy is used (bat-teries in the switching mode), islanding event at 02h00 . . . . . . . . . 104
5.8 Profiles of RES generated power and load power consumption . . . . . 1055.9 Simulation results of the two way communication between de central-
ized controller and the distributed controllers. (a) Voltage magnituderesponse comparison for FTMPC and MPC regulating the DEG; (b)Power generation response comparison for FTMPC and MPC; (c) Post-failure model estimation using the FDD module; and (d) Residual re-sponse (fault is present at 10h00 AM) . . . . . . . . . . . . . . . . . . . 107
6.1 PDE output signal when the load shedding NMPC strategy is used (bat-teries in the switching mode), islanding event at 12h00 . . . . . . . . . 111
A.1 Microgrid architecture designed by Homer Energy . . . . . . . . . . . . 131
B.1 Simplified model of a dc transmission line facing a fault. . . . . . . . . 136B.2 (a) Fault current excursion to zero; (b) Arc voltage model. . . . . . . . 137B.3 Numerical solution to equation B.10. Current excursion to zero. . . . . 139B.4 Circuit design for the ILVDCB . . . . . . . . . . . . . . . . . . . . . . . 140B.5 Fuzzy sets used in the KBFC. . . . . . . . . . . . . . . . . . . . . . . . 141B.6 Voltage output simulation (KBFC). . . . . . . . . . . . . . . . . . . . . 142B.7 Current excursion to zero comparison for the control algorithms. . . . . 143
xv

List of Algorithms
2.1 Numerical solution method - Steepest descent algorithm . . . . . . . . 252.2 NMPC algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3 Kalman filter algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . 405.1 NMPC algorithm for automated load shedding and BSS management . 102
xvi

Glossary
AbbreviationAFTCS Active fault-tolerant control systemAGC Automatic generation controlAMI Advanced metering infrastructureANFIS Adaptive neuro-fuzzy inference systemANN Artificial neural networkARR Analytical redundancy relationBPS Bulk power systemBSS Battery storage systemCAMC Central autonomous management controllerCB Circuit breakerCHP Combined heat and powerCSI Current source inverterCUSUM Cumulative sumDEG Diesel engine generatorDER Distributed energy resourcesDC Distributed controllerDG Distributed generationDMMS Distribution monitoring and management systemDP Dynamic programmingDS Distributed storageEKF Extended Kalman filterFDD Fault detection and diagnosisFDI Fault detection and isolationFTC Fault-tolerant controlGA Genetic algorithmGIS Geographic information systemILVDCB Intelligent low voltage dc breakerIMC Internal model-based controllerKF Kalman filterLC Load controllersLTC Load tap changingLPV Linear parameter varyingLTI Linear time-invariant
xvii

AbbreviationLQR Linear-quadratic regulatorLV Low voltageMC Local microsource controllerMGCC Microgrid central controllerMILP Mixed integer linear programmingMINLP Mixed integer non-linear programmingMPPT Maximum power point trackingMPC Model predictive controlMRAC Model reference adaptive controlMV Medium voltageNMPC Nonlinear model predictive controlNNC Neural network controllerOCP Optimal control problemPFTCS Passive fault-tolerant control systemPCA Principal component analysisPCC Point of common couplingPCS Power conditioning systemPV PhotovoltaicPWM Pulse width modulationRES Renewable energy sourcesSAIDI System average interruption duration indexSAIFI System average interruption frequency indexSAShA System awareness self-healing control algorithmSCADA Supervisory control and data adquisitionSG Smart gridSM Smart meterSOC State of chargeSPWM Sinusoidal carrier-based PWMSVPWM Space vector PWMTRV Transient recovery voltageVSC Voltage source converterVSI Voltage source inverterWEGS Wind-driven electricity generation systemWTG Wind turbine generator
xviii

Chapter 1
Introduction
1.1 Motivation
Many inventions have evolved over time from their initial conception, e.g. the tele-phone. The telephone invention triggered a revolution in communications around theworld that led to the powerful technology we have today. Alexander Graham Bell wouldbe proud of his invention because of the impact and evolution of telephone, from land-lines to satellite communications, the Internet and so on. Another important inventionis electricity. According to [7], electricity is the most important engineering inventionof last century. Electric power systems have evolved over more than a century fromisolated networks to interconnected grids that generate, transmit, and distribute elec-tric energy over large geographical areas. The search for green generation resources hasfostered the development of wind, solar, and other types of generation sources, whichare being connected in distribution and subtransmission networks. Today, consumersare no longer just consumers, they can also be generators and their consumption andgeneration must be carefully regulated. This is the world of the smart grids (SGs) [8],where it is possible to have microgrids operating as stand-alone islands by design or incritical operating conditions. A key purpose of SGs is to provide a reliable power sup-ply. This will be achieved through a combination of monitoring, control and response.The authors of many different research papers [9, 10, 11, 12] agree on the concept andpurpose of SGs, they differ in their perception of SGs future development.
Electric power systems have lost redundancy because of load growing faster thangeneration. For example, the North American Electric Reliability Council (NERC)estimates that the US demand for electricity will grow close to 2% per year over thenext decade, while supply will grow at 1.5% per year [13]. Increasingly, power comesfrom less dependable renewable sources. An additional consideration is the type ofgeneration installed to cover the growing demand. A recent research paper from theWorld Resources Institute states that 1199 coal plants are currently proposed in 59countries [14]. If all these plants actually get built, it would increase global coal-firedpower generation capacity by more than 1.4 TW. That is about 40% of total US electricpower generation and is as much as the US coal generating capacity. This new coalgeneration would contribute to increase global temperature in 4oC [15].
1

Electric utilities are expected to provide continuous and high quality service totheir customers at reasonable prices by making economical use of available infrastruc-ture. The most powerful force shaping the power industry future is economics, butenvironmental protection is receiving growing attention today. Global warming trendcould be damped through energy conservation; half of the energy presently generated infossil fuel plants can be replaced by renewable energy sources (RES) such as solar andwind. The remaining 25% of the energy required must be provided by fossil or nuclearplants due to their higher availability and the requirements for voltage and frequencycontrol [16]. Therefore, any new innovations/trends will probably be adopted only ifthey reduce costs and CO2 emissions.
Preventing blackouts is an important task for many power engineers and re-searchers. Blackouts not only cause economic losses but also jeopardize human safety.New York City suffered a major blackout on August 14th of 2003 [17], and recentlyexperienced a five-day power outage due to hurricane Sandy on October 2012, affect-ing 4.5 million homes and businesses [18]. Most of the population decided to stay athome at night for safety reasons, revealing how serious a blackout could be and howimportant is to mitigate its effects. Table 1.1 lists some other major blackouts.
Table 1.1: List of some major blackouts [1]
Location Affected Consumers(×106
)Date
Indonesia 100 18/08/2005South and southeastern Brazil 97 11/03/1999Brazil and Paraguay 87 10-11/11/2009North and northeastern America 55 14-15/08/2003Italy 55 28/09/2003North and northeastern America 30 09/11/1965
When a fault occurs in a power system, protective devices operate to promptlyisolate the faulted element and reduce the fault impact on the entire system. Onexceptional cases, the fault triggers a number of considering events that cause a majorsystem blackout. Many automatic actions, and manual operations have to be performedto restore the system. DG sources can mitigate the effects of blackouts by servingutility load under emergency conditions. RES have gained acceptance as DG and, dueto deregulation in some countries, they are being deployed in distribution systems andfor microgrid networks. The key purpose of SGs is to guarantee power delivery to theconsumers even in the worst scenario, e.g. natural disasters. Hybrid power systems,such as wind-diesel, photovoltaic-battery, and other systems, are viable technology formicrogrids that requires solving the problems related to the integration of RES intothe power system [19].
The typically radial topology of the present utility distribution networks is mainlyfixed and suffers changes only after the occurrence of a fault. The introduction of DGin these networks creates looped configurations that require more advanced control
2

and protection schemes. The advanced communications information technologies andcontrol techniques available today are up to this challenge. The application of thesetools will improve distribution systems reliability and power quality, and to improveother functions, such as asset management.
The development of an intelligent power distribution system requires new ap-proaches. Reference [20] provides a French vision of SGs, and states that DG hasstrongly increased in the last five to ten years, especially with the advent of wind power.It shows that by 2020 the European Union targets 20% of the energy consumed to begenerated by RES. A technical report on the development of an intelligent distribu-tion automation system in Korea [21], describes the following system features: remoteoperation, management of low voltage (LV) and medium voltage (MV) networks sup-ported on a geographic information system (GIS), loss minimization, volt/var controlfor integrated DG, and power quality monitoring. This ambitious system still lacks au-tomatic restoration functions, which is very important for radial systems. A completereview on automation technologies for DG is summarized in [22]. None of the studiedsolutions propose neither a reliable self-healing approach for dealing with a microgridconfiguration nor an optimal control strategy for DG integration.
This research work is related with the integration of DG sources in a mediumvoltage distribution system that can operate permanently or temporarily isolated fromthe bulk power system. An optimal control strategy that secures a reliable operation ofan islanded microgrid is proposed. This strategy prioritizes the use of power generatedby the DG to cover the load demand. Every DG unit connected to the microgrid has adistributed controller (DC) to regulate generated power, voltage, and frequency. Whenprotective devices isolate faulted network sections, control actions based on a fault-tolerant framework are performed for restoring power supply to unfaulted sections.A centralized load shedding strategy guarantees the balance of generation and load,leading to the concept of system awareness self-healing control algorithm (SAShA).This control strategy is assisted by a distribution monitoring system (DMS), whichperforms real-time monitoring of the voltages and currents of the DG units and loadsin the microgrid.
1.2 Problem statement
Blackouts cause important economic losses and safety regards. Overhead distri-bution systems are subject to two types of electrical faults: temporary and permanentfaults. Depending on the automation level of the grid, localization and isolation offaulted elements can be also done automatically. Application of reclosers, sectionaliz-ers and other local automation apparatus significantly improve functionality of faultmanagement and duration of undelivered energy to the consumers [23]. Redundancypaths through the development of primary networks and the integration of DG indistribution systems provide the highest reliability at the price of increased cost andcomplexity. The majority of the automation systems deployed in distribution networks,still lack of some important functions to guarantee a correct integration of RES, among
3

which we can mention:
• Automatic network restoration when a permanent fault is present;
• Increased reliability in the DCs, which regulate voltage and frequency in the DG;
• Fault-tolerance of the controllers to assure the continuity of the service underspecific faults;
• Real-time information exchange between a centralized entity and DCs to takeonline optimal decisions to guarantee a reliable operation of the microgrid.
Most present-day distribution feeders are radial. However, DG is appearing inmany systems. This fact, and the growing requirements concerning power quality andservice reliability, represent a trend towards looped or network systems (microgrids).
Control of power systems depends on the measurements taken from sensors and thequality of these signals. Failures due to broken connections, communications problemsand sensor failures could drive the power system controllers to damages and gener-ate severe consequences. Therefore, fault-tolerant control systems (FTCS) are highlyrequired in SGs designs in order to increase reliability and safety.
Fast distribution network restoration can accomplish multiple objectives, includ-ing reduction of the system average interruption duration index (SAIDI) and systemaverage interruption frequency index (SAIFI), and/or the minimization of unservedenergy to loads. A highly reliable, reconfigurable, and fault-tolerant system must con-tain multiple redundant paths. DG offers a viable alternative to achieve generationredundancy, operating as ancillary systems when required.
Distribution system automation is explored in [24], together with automatic re-configuration after a disturbance and the impact on reliability in a smart power distri-bution system. A novel concept of fault detection, isolation and reconfiguration (FDIR)is mentioned and it is emphasized that more important than multiple paths in distri-bution systems are smart strategies to manage redundancy, which indeed is part of thegoals of the research to be conducted in this work.
In spite of the numerous contributions made in the distribution systems automa-tion, see for instance [25, 26], strategies for a reliable operation in microgrids stillrequire further studies. Novel and traditional control techniques applied to the micro-grid operation to optimally integrate DG is urgently required. Reference [27] presentsa fault detection algorithm in microgrids; both symmetrical and unsymmetrical faultsare tested with radial and loop structure of a distribution power system. Although faultisolation is achieved, there is not a system reconfiguration strategy after the occurrenceof the fault. Reference [28] deals with optimal algorithms proposed for microgrids man-agement when distributed energy resources (DERs) are present. There are also somecontributions about complete automation in distribution systems described in [29, 30]but unfortunately RES challenges, such as variable generation are not considered, nei-ther the operation of a microgrid in islanded mode.
This research points to the future, since the integration of RES into power dis-tribution systems is still an immature technology that demands exhaustive research
4

activities. The main aim of this research is to solve the problem of integrating DG intomicrogrids with the use of model-based controllers. Methodologies and designs are tobe presented throughout this thesis to solve this problem
1.3 Literature review
Traditionally, electric power is delivered unidirectional from distribution stationsto the consumers. Nevertheless, integrating DG into power distribution systems toallow customers to become active protagonists is encouraging system planners, util-ity companies and researchers to develop new trends and technologies in this field.Kahrobaeian et al., [31] describes a candidate control architecture for integrating DGinto microgrids. A hierarchical internal model-based controller (IMC) drives DG units,performing the following actions: power, voltage and current control.
Reference [32] proposes a volt/var management strategy to regulate the systemvoltage and mitigate voltage variation in the distribution system. The challenges ofintegrating DG are analyzed, but no simulations have been conducted. Thomposon etal., describes a similar approach applied to a wind farm using a real-time automationcontroller, where both voltage and reactive power are regulated at the point of inter-connection, utility with main grid, through a real-time adaptive control algorithm thatswitches on and off capacitors banks. Under the eventuality of a decision conflict be-tween the power factor and voltage criteria, voltage control has priority. An extendedapproach of this concept, where the authors include logic to allow the voltage versuspower factor priority to be user settable is described in [33].
Reference [37] details the features of an automatic power restoration system de-ployed by S&C Electric Company. The control system utilizes DCs, distributed intelli-gence and peer-to-peer communication to isolate faults and restore power to unfaultedsections. RES integration is still under investigation for this project. Further informa-tion about active microgrids projects around the world, including details on technicaloperational aspects and design criteria can be found in the survey paper [38].
Two main approaches related to the operation and control of microgrids have beenidentified:
1. Design and planning: these studies usually apply optimization techniques to de-termine the optimal equipment capacity and placement within the distributionnetwork. Table 1.2 shows a comparison among recent contributions related tothis field.
2. Control during normal operation: Energy quality and proper energy dispatchhave to be controlled in the two operating modes of a microgrid: grid-connectedand islanded. Table 1.3 shows a summary of some contributions of distributionautomation in the last decade.
The high integration of cutting edge technology within a microgrid hinders anoptimal and coordinated operation of all the variety of devices installed in a microgrid.
5

Table 1.2: Brief summary of literature review on distribution systems planning
Year Author Applications Advantages Disadvantages2004 [34] Economical planning
of distribution net-works with DG
• Optimal cost efec-tive DG sitting andsizing
• Hourly ahead eco-nomical dispatchstrategy
• Does not give pref-erence to RES
• No control strate-gies for DGs
• Does not considerislanded mode
2006 [35] Microgrid modelingsoftware for optimaloperation
• Grid-connected andislanded mode de-signs
• Reduced CO2 emis-sions design
• Dispatch strategies
• Ideal operation ofpower converters
• No faults conside-red
2007 [36] Distribution systemplanning
• Optimal solutionfor integratingDG with lossminimization
• Non-linear modelconsidered
• Does not includeRES
• No control strate-gies for DG
• No dispatch strate-gies
2012 [29] • Islanded microgridplanning
• Operational model
• Energy dispatchstrategies inislanded and grid-connected mode
• High RES penetra-tion
• Small radial net-work architecture
• Islanded mode only
• Constant load con-sideration
2012 [28] Business model forislanded microgridplanning
• High RES penetra-tion
• Net present cost(NPC) minimized
• Unflexible microgidarchitecture
• No dispatch strate-gies
• Islanded mode only
• No control of DGconsidered
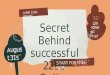
Figure 1.1 shows a hierarchical control scheme for large power systems that has beenadequate for the operation of bulk power systems (BPS). Although, operating char-acteristics of a microgrid are different from those of BPS: smaller generation inertia,
6

Table 1.3: Brief summary of literature review on distribution automation systems
Year Author Applications Advantages Disadvantages2005 [39] Microsource model-
ing for DG• RES models
• Control strategiesfor microgrids
• Simulations only
• Load stochastic be-haviour neglected
2006 [37] Power restoration tounfaulted segments
• FDI and powerrestoration
• Physically imple-mented
• Improved SCADAcapabilities
• Does not integrateRES
• Islanded mode con-figuration did notconsidered
2009 [21] Control and monitorfacilities in DN
• Distributed SCADA
• Optimal planning
• FDI with GIS
• Physically imple-mented
• No RES included
• No reconfigurationunder faults
• Does not includemicrogrid configu-ration
2011 [31] DG control interfacefor microgrids
• Hierarchical controlframework
• Grid-connected andislanded mode
• Simplified model
• Only simulations
• Does not integrateRES
• No FDI
2011 [32] DG integration in mi-crogrids
• volt/var manage-ment
• Faults management
• RES integration
• Radial feeders
• Simulations only
variable power generation due to RES integration, low fault currents when islanded,etc. A potential hierarchical control of microgrids is discussed in [25, 40, 41]. In thiscontext, the primary control is designed for controlling DG units to add virtual inertiasand to control output impedances. Secondary control deals with corrections of steady-state errors in frequency and voltage magnitudes produced by the primary control loop.The tertiary control is conceived for energy management according to different designcriteria, such as: optimal power flow, microgrid stability, environmental issues, etc.
7

Figure 1.1: Hierarchical control scheme for power systems
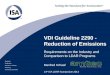
Within the framework of environmental and economical issues, and microgridstability, optimality is directly linked with the minimization of fossil fuels consump-tion, management of storage units and loads, and to guarantee a reliable operationof the microgrid. Figure 1.2 shows a categorization of optimal control techniques forcontrolling microgrids. The classification is made according to the objective functionto be minimized and the optimization method.
Optimal power flow (OPF)The optimal power flow problem becomes a challenging task in the microgrid
operation due to the following issues: RES variability and non-constant load demand,reverse power flows at the transmission-distribution boundaries, and energy exportfrom the distribution network to the transmission grid. A telecommunicationsinfrastructure and the use of smart meters (SM) allow fast interchange of localmeasurements of power consumption and DG active power generation to feed powerflow equations. Reference [42] presents a weighted-sum objective function for solving amultiobjective optimization problem within the OPF framework for a microgrid withmultiple DG units and battery storage systems (BSS), through a niching evolutionaryalgorithm (NEA). Andreasson et al., [43] proposes a centralized controller whichminimizes a quadratic power generation cost function while keeps constant a frequencyreference of the nodes of the grid involved in the minimization function; this resultis compared with a distributed controller strategy. Reference [44] details a controlstrategy for managing stored energy in order to optimize the overall microgrid powerconsumption at the point of common coupling (PCC) considering constraints imposed
8

Figure 1.2: Classification of optimal control techniques for microgrids control
by the storage devices, voltage and limits, and power limits.
Load sheddingTo counteract under system’s instability issues, special protective algorithms
have been designed based on voltage and frequency limits, e.g. under voltage loadshedding (UVLS) and under frequency load shedding (UFLS) schemes, which workin load shedding relays. An uncoordinated and non-optimal load shedding scenariois commonly performed in the system under these circumstances. References [45, 46]detail centralized load shedding strategies for preventing potential outages.
Carbon dioxide emissions (CDE) reductionCDE reduction is one of the principal goals of SGs architectures. In this context,
apart from guaranteeing a stable operation of the microgrid, whether it is operatinggrid-connected or isolated, some research papers have prioritized in their cost functionof the optimization algorithm and constraints, variables directly linked with CDE tobe minimized, as detailed in [47, 48, 49].
Predictive optimizationThe MPC algorithm has the capability of performing a constrained minimization
of a customized cost function over a prediction horizon. There are research papersrelated to the development of energy management systems (EMS) for microgrids withMPC [50, 51, 52, 53]. For instance, in [50, 51] is proposed a distributed control strategymanaged by a supervisor MPC for manipulating the DG units set points online, thatguarantees an optimal energy balance in the microgrid. In [52] a supervisory MPCis designed for optimal power management an control of a hydrogen-based microgrid.Olivares et al.[53] proposes a centralized EMS with MPC, which optimizes the dispatch
9

of the energy in storage units, as well as decomposes the energy management probleminto two problems: unit commitment and OPF in order to simplify the optimizerperformance.
1.4 Contributions
Main contributions of this research work are listed:
• A detailed framework for applying model-based control algorithms (MPC andMRAC) that guarantees a reliable operation of microgrids in islanded mode;
• A controller design for integrating a master generation unit (diesel engine (DE))in a microgrid, that guarantees stable and secure operation of the network underthe presence of faults in the actuator of the DE and 3-phase faults in particularnodes of the network;
• A centralized optimal control strategy that process a data set formed by: batteriesstate of charge, current RES power generation and forecasted load. The controlstrategy predicts upcoming over generation issues when the microgrid is operatingin islanded mode to initiate automated load shedding procedures to balance thepower generated by the RES and the demand load.
According to the literature review, the necessity of an integrated strategy involvingCDE reduction, reliability, and prediction is needed. The methodology developed inthis research work points to solve the problem of integration of DG into microgrids.The controllers to be used are model-based, whose flexibility allows the linkage of thefields shown with dashed lines in Figure 1.2.
The control algorithms for the development of the solutions proposed in this re-search were selected due to the following criteria:
• Inherent capabilities for managing constraints within an optimal control problem(OCP);
• Drive operations based on economic or more global drivers, e.g. maximum profit,maximum energy, maximum yield;
• Focus is on process variables - generated power, frequency, voltage, angles, etc.;
• Allows the possibility of sending setpoints to process control loops. It requieresgood regulatory control to achieve potential benefits.
A microgrid modeling procedure is also developed in this thesis, since the controlapproaches to be used are model-based.
The islanded operation mode of a microgrid represents control challenges for reg-ulating voltage and frequency, which is not the case when a microgrid is plugged intothe main power system. Since optimality and reliability are main concerns for the
10

microgrid operation, a first stage of the research was dedicated to the design of DCsusing MPC and MRAC for controlling the DG units. The main results of this stageof the research were the methodologies for integrating a master generation unit into amicrogrid for guaranteeing a stable and secure operation, even under the presence offaults in the actuator of the DE and 3-phase faults in particular nodes of the network.The results showed much better performance than classic control techniques applied tothe same system. The following papers were generated as result of this first period ofthe research: [54, 55, 56, 57, 58].
The next stage of the research is applied to a microgrid benchmark model, deve-loped with the microgrid models generated in the previous stage, as well as the proposedDCs for every DG unit. An optimal control strategy based on the batteries stateof charge (SOC), current RES power generation and forecasted load are used in amicrogrid centralized controller (MGCC) to identify upcoming over generation issueswhen the microgrid is operating in islanded mode, in order to initiate automated loadshedding procedures to balance the power generated by the RES and the demand loadfor guaranteeing a stable operation. An NMPC algorithm is used in the MGCC forprocessing the data and generating the optimal control switching signals of the loadshedding strategy. The NMPC allows online constraints management, which is usedfor updating maximum DEG power generation under faulty scenarios when the faultdetection and diagnosis (FDD) module of the DEG detects any actuator performancedegradation. This control strategy is assisted by a DMS, which performs real-timemonitoring of the generated power coming from the RES and the current load demandat each node of the microgrid. Significant performance improvement of the microgridis achieved with the use of this control strategy, since it keeps the balance between thepower generated by the DG units and the load demand, which increases the microgridreliability. The following papers were generated as result of this stage of the research:[59, 60].
1.5 Outline
Chapter 2 introduces some important concepts of power systems and control en-gineering, which are used for the development of the methods proposed in this researchwork. The concepts are treated with enough detail for readers to understand the model-ing procedures and controller designs described in the upcoming chapters. The selectedreferences provide guidance for further studies about these topics.
Chapter 3 describes the modeling procedure of the DG units used in the microgridconfigurations tested in this thesis. Models of a DEG, a wind turbine generator (WTG),a photovoltaic (PV) array, a BSS and power electronic converters are given, as well asthe programming of every model in MATLAB. A microgrid benchmark model thatintegrates all the above-mentioned generation units into a rural distribution system isalso described in this chapter.
Chapter 4 presents a methodology for integrating a master generation unit into amicrogrid through the use of model-based controllers, particularly MPC and MRAC.
11

Simulation results of the proposed schemes are shown as well as an extended discussionon its performance and its advantages over classic control techniques.
Chapter 5 presents the design and development of an MGCC using an NMPC. Thebenchmark model developed in Chapter 3 is considered as the study case. The mainpurpose of the control strategy in conjunction with the DCs developed in Chapter 3 is toguarantee a stable and optimal operation of the microgrid when it is working in islandedmode. Simulation results show significant improvement in the network reliability whenthe proposed control strategy manages the microgrid in different operation scenarios.
Chapter 6 presents the conclusions of the thesis and recommends future work. Theadvantages, and disadvantages of the proposed controllers are presented, and an openhorizon for future research activity in the microgrid operation and control is discussed.
12

Chapter 2
Theoretical framework
2.1 Power flow analysis in electric power systems
Power flow analysis allows calculating the node voltages and complex power valuesin a power system for a given load condition.
2.1.1 Node equations
Kirchhoff’s current law equations can be expressed in terms of admittances andnode voltages in circuits operating in sinusoidal-steady-state and receive the name ofnode equations [61]. Analysis of networks with specified current inputs and constant setof nodes is particularly suitable for node equations application. Reference [62] providesa general description of node and mesh equations. The node equations approach tocircuit analysis can be summarized into three steps:
1. Consider a circuit with N + 1 nodes, called also buses. Select one node as thereference bus and define all the remaining node voltages with respect to this node.
2. Transform every voltage source and its respective series impedance into an equi-valent current source in parallel with the corresponding admittance.
3. Write node equations as follows:Y11 Y12 · · · Y1N
Y21 Y22 · · · Y2N...
.... . .
...YN1 YN2 . . . YNN
V10
V20...
VN0
=
I10
I20...IN0
(2.1)
where YN×N is the bus admittance matrix, and VN×1 and IN×1 are the voltageand current vectors. The elements Yij of the admittance matrix are formed asfollows:
13

Ykk =N∑k=1
Admittances connected to bus k (2.2)
Ykn = −N∑k=1k 6=n
Admittances connected between buses k and n (2.3)
The off-diagonal elements Ykn of Y are called mutual admittances and the diag-onal elements Ykk are called self-admitances. The node equations are actually currentequations written for each node in compliance with Kirchhoff’s current law.
2.1.2 Power flow analysis equations
The node equations (2.1) allow determining the node phasor voltages of a networkwith a given amount of buses. For power system and load flow analysis, a set ofpower balance equations of the type of (2.4) and (2.5) is used (see [2] for details of thederivation of these equations).
Pk = Vk
N∑n=1
YknVn cos (δk − δn − θkn) (2.4)
Qk = Vk
N∑n=1
YknVn sin (δk − δn − θkn) (2.5)
where Vk and δk are the magnitude and angle of node k voltage; Ykn and θkn are themagnitude and angle of the element of the k-th row and n-th column of the admittancematrix Y; and Pk and Qk are the active and reactive power at node k.
The bus voltage magnitudes and angles are called state variables, since their valuesdepend on the generated and consumed power at all the buses. The power flow problemconsists of determining values for all state variables by solving an equal number of powerflow equations based on a specified input data. To facilitate this task, each bus k iscategorized into one of the following bus types:
1. Swing bus : This bus is the reference bus, typically specified as k = 0 and V0 =1.0∠0o.
2. Load (PQ) bus : Pk and Qk are input data for this type of bus. The power flowprogram computes Vk and δk.
3. Voltage controlled (PV) bus : Pk and Vk are input data for this type of bus. Thepower flow program computes Qk and δk. If an upper or lower reactive powerlimit is reached, e.g. a generator excitation limit, the bus is changed to a PQ bustype.
14

A numerical method is used for iteratively computing Eqs. (2.4) and (2.5). Thepreferred method is the Newton-Raphson algorithm. The power flow analysis of adistribution system with DG may result in the export of power to the bulk powersystem. Some papers discuss this situation, for example [63, 64, 65].
2.2 Distribution systems fundamentals
Figure 2.1 shows major components of a power system. Power systems are mainlycomposed of large capacity generation units, transmission lines and distribution sys-tems. Cutting edge technology involves the operation of generation and transmissionsystems. The less automated part of the power system is the distribution system [66].Typically at the distribution level, devices’ characteristics are oversized for preventingfrom a service interruption due to an overload condition after a period of time from itsinitial design.
Figure 2.1: Main components of an electric power system
A distribution system is composed by a number of distribution substations, whichare fed by one or more subtransmission lines. Each distribution substation will serveone or more primary feeders. Feeders are mainly radial today, as shown in Figure 2.2.Nevertheless, this research deals with looped distribution systems, which integrate DGunits. Figure 2.3 shows an overview of this concept.
Figure 2.2: Traditional medium-voltage distribution system
The distribution system includes two subsystems:
1. Primary distribution, whose function is to distribute energy from the distributionsubstation to the distribution transformers, in the 2.2 to 46 kV range.
15

2. Secondary distribution, which distributes energy at customer utilization voltages.See Table 2.1 for details.
Figure 2.3: Distribution system with DG
Table 2.1: Typical secondary distribution voltages [2]
Voltage # Phases # Wires Applications120/240 V Single-phase Three Residential
208Y/120 V Three-phase Four Residential/Commercial480Y/277 V Three-phase Four Commercial/Industrial/High rise
2.2.1 Distribution substations
The primary function of a distribution substation is to reduce the voltage downto the distribution level (common levels are 34.5 kV, 23.9 kV, 14.4 kV, and 13.2 kV)and to serve feeders. Typical power ratings for the step-down distribution substationtranformers vary from 15 MVA for older substations to 200 MVA or even higher fornewer installations. As the load on the feeders varies, the voltage at the substationneeds to be regulated; common regulators are the step-type regulator and load tapchanging (LTC) transformers.
2.2.2 Feeders
Typical primary distribution feeder ratings are: 4 MVA for 4.16 kV, 12 MVAfor 13.8 kV, 20 MVA for 22.9 kV and 30 MVA for 34.5 kV [2]. Feeders are usually
16

segregated into several three-phase sections connected through sectionalized fuses orswitches. Each feeder section may have several single-phase and three-phase laterals.Dedicated primary feeders usually supply industrial or large commercial loads. Maincomponents of a feeder are [67]:
• Three-phase, two-phase and single phase laterals
• Step-type voltage regulators
• In-line transformers
• Shunt capacitor banks
• Distribution transformers
• Three-phase, two-phase and single phase loads
2.2.3 Distribution system protective devices
Protecting utility distribution systems require the application of different devices,such as fuses, automatic circuit reclosers, automatic line sectionalizers, and protectiverelays. Other apparatus, such as circuit breakers and electrically-operated disconnects,are also required to provide fault current interruption, faulted element isolation and/orcircuit reconfiguration.
Fuses
Fuses are protective devices with a fusible element that combine fault detectionand fault interruption functions. During an overcurrent condition, the element meltsand an electric arc appears. After some time, the fuse extinguishes the arc and thefault current is interrupted.
Automatic circuit reclosers
Automatic circuit reclosers provide fault detection, fault current interruption, andreclosing functions. Reclosers are typically pole mounted on overhead distribution linesalong the main feeders or in some important laterals. However, they are sometimes usedin place of a breaker on the distribution substation to provide feeder protection. Auto-matic reclosers provide as many as four trips and three reclosures, to give temporaryfaults the opportunity to clear.
Automatic line sectionalizers
An automatic line sectionalizer is a pole-mounted device that automatically iso-lates faulted line sections in overhead distribution systems. Since sectionalizers arenot intended to interrupt fault current, they are used in combination with a recloser
17

or relayed breaker with automatic reclosing. The sectionalizer counts the current-interrupting operations of the backup recloser or breaker during the fault. After apreselected number of operations, the sectionalizer opens while the interrupting deviceis open, thus isolating the faulted line section. Then, the recloser or relayed breakersuccessfully reclose to restore service to non-faulted sections of the circuit. For tempo-rary faults, the sectionalizer operating mechanism resets before completing the countingsequence. The sectionalizer can be set to operate after one, two, or three counts.
Protective relays
A protective relay is a device that detects faults or other abnormal operatingconditions in the protected line or apparatus and issues a tripping signal to a cir-cuit breaker. The circuit breaker opens its contacts to interrupt current and isolatethe faulted line or apparatus. Protective relays are connected to the power systemthrough current transformers and/or voltage transformers. Protective relays are usedin medium-voltage and high-voltage power systems.
2.3 Smart grids overview
The Smart Grids European Technology Platform has defined a smart grid as anelectrical network which integrates in a smart way every action of the users pluggedinto it − generators, consumers and those that can perform both actions, in such away that electricity is delivered in an efficient, sustainable, economic and safe manner[68]. The author of an SG related book [69], defines an SG as: “The use of sensors,communications, computational ability and control in some form to enhance the overallfunctionality of the electric power delivery system”.
Figure 2.4: SGs vision
18

One of the objectives of SGs is to deliver an optimal amount of information andload control to the users of the grid, distribution enterprises and network operators inorder to reduce operational costs and energy consumption. Many authors of papersrelated to SGs associate this technology with the use of RES within the distributionsystem [70, 71, 72]. Figure 2.4 depicts a global vision of SGs.
In the following subsections it will be briefly presented, possible changes in thedistribution system from a topological point of view.
2.3.1 Distributed generation
A DG unit is a small-scale generation source with an output ranging from 1kW to several MW and usually installed at the distribution level [73]. A particularcharacteristic of DG is that the generating sources are near the end users. As RESare penetrating the utility systems, the power industry is undergoing a paradigm shiftthat will change the industry to the use of DG systems. Figure 2.5 ilustrates the DGconcept by showing three different locations with installed DG units. The left sidephotograph was taken in Hannover (Germany) where a wind turbine (WT) is locatednear the customer premises; the middle photograph was taken in Jersey City (US)where PV arrays generate power for the public lightning; the right side photographshows an auto-sustainable house with PV arrays and batteries for energy generation inBarcelona (Spain).
Figure 2.5: DG overview
Small generators (microgeneration units), which transform energy from RES, canbe incorporated in the electric distribution network, e.g. WTG and PV arrays. Thesenew sources pose many challenges for researchers and designers regarding power qualityand economical issues. Today’s power systems rely on spinning reserve and droopingfrequency-load characteristics, which distribute additional load through load referenceset points provided by the control and dispatch centers. Future systems, on the otherhand, will rely on RES, which operate at peak power in order to displace as much fuelconsumption as possible. This peak power constraint imposed by wind and sun com-plicates the frequency/load control of the entire system [74]. The inertia of the powersystem is being removed from the grid gradually by the incorporation of RES pluggedinto the grid through power converters. In order to compensate for this intermittent
19

and changing power, short and long-term storage devices should be deployed. Storagedevices can be charged during periods of low power demand and can supply powerduring high power demand. This concept is shown in Figure 2.6.
Figure 2.6: Example of an energy dispatch strategy for a microgrid
2.3.2 Microgrids
Microgrids are small-scale LV and MV power systems with DERs, storage de-vices and controllable loads, connected to the main power network or islanded, in acontrolled and coordinated way [75]. The operation of microgrids offers distinct advan-tages to customers and utilities by improving energy efficiency, reducing transmissionand distribution losses, improving reliability and resilience, reducing environmentalimpact, improving network operational benefits and providing more cost-effective elec-tricity infrastructure replacement. Microgrids have different operating characteristicsthan BPS. A comparison, between microgrids and BPS is shown in Table 2.2.
Table 2.2: Comparison between microgrids and BPS
RES Pene-tration
EnergyStorage
VoltageLevels
Dispatch Ob-jects
Operation Mode
Microgrid High Yes LV and MV Controlablegenerators andloads
Grid-connectedand autonomousmode
BPS Low Negligible HV Controlable gen-erators
Independent oper-ation
Microgeneration units, typically located at users’ sites, have emerged as a promi-sing option to meet growing customer needs for electric power with an emphasis on
20

reliability, power quality and contribution to different economic, environmental andtechnical benefits. However, the impact of microgeneration at LV levels on powerbalance and grid frequency is a great challenge [76].
2.3.3 Microgrid control
A potential hierarchical control of microgrids is discussed in [25, 41, 40, 77]. Toachieve an effective coordination of the hierarchical control scheme, a centralized mi-crogrid control strategy composed of three entities is proposed (see Figure 2.7). Thecontrol entities are:
• DER distributed controllers
• MGCC
• DMS
Figure 2.7: Microgrid control and management system architecture
DCs work at the device level and are designed for a correct operation of everyDG unit. Every DC must be fast and reliable to maintain voltages, frequencies andpower flows within acceptable tolerances and to adapt in real time to unknown andvariable loads and network conditions. At the MGCC level, the power management
21

of the microgrid is determined based on the information from DG units active power,load demand and storage requirements. A two-way communication between the MGCCand the DCs allows the interchange of power references (set points) sent to the DGunits and loads, while each individual DC ensures that the power reference from thecentral control level is reached. At the DMS level, overall grid demands and stabilityrequirements are met.
2.3.4 Distributed automation and control
An important function of distribution systems is to maintain proper voltage levelto the consumers. This function should be further expanded in order to allow su-pervising, communicating and executing control actions in the grid. From a designperspective, the most important aspects of this concept are found in areas like com-munications and control; for example using metering and control devices will allowfunctionalities for fault detection and isolation (FDI), supervise voltages and currents,maintain two way communications, and automatically reconfigure the entire system inorder to promptly restore customer service after faults, i.e. restore service to unfaultedsections of the network.
Figure 2.7 suggests a distributed control strategy of the microgeneration units forguaranteeing a reliable operation of the DG units within the microgrid. The effect ofRES integration has to be considered in the local controllers design, e.g. unpredictablepower generation (weather dependent), harmonic distortion, etc. Therefore, more ad-vanced DCs for the DG units, compared to classic control, are highly needed as well ascentralized strategies for improving the dispatch of the energy generated by the RES.These advanced controllers should also include the capability of adapting the microgridbehavior to topology changes, e.g. transition from grid-connected operation mode toislanded mode.
2.3.5 Advanced metering infrastructure
SMs are an important component of SGs. These devices have the following mainfeatures: full-duplex communication, ability to connect or disconnect loads, and record-ing capabilities for capturing waveforms for supervising voltage and current. SMs aregradually replacing the traditional meters currently in operation and are also beinginstalled in new microgrids. SMs transmit information to different information clientsvia SCADA systems and other networks.
One of the main features that SMs will offer to consumers is the possibility to readin real time rates and pricing policies, allowing users to decide in a wisely way how touse electric energy. There are many research papers devoted to household schedulingusing advanced metering infrastructure (AMI) in order to reduce power consumptionduring peak consumption hours [78, 79]. Figure 2.8 shows a possible architecture fora smart metering system. Due to the large number of SMs that will be available indistribution systems, the potential ability of SMs to provide additional information foroutage analysis is also being investigated.
22

To improve the self-healing capability of the distribution system, outage man-agement systems are evolving under the influence of two complementary technologies:feeder level fault detection, isolation and service restoration; and smart meter-basedoutage analysis. Both technologies are essential elements in any SG blueprint [80].AMI has several advantages to be exploited in SGs architectures, but SMs have beenwidely controversial, partly because of concerns about privacy and security, since themeters could provide a window into what customers are doing in real time and makehomes vulnerable to break-ins and theft, for example. In February 2012, Californiapublic utilities commission authorized Pacific Gas and Electric (PG&E) to allow itscustomers to decline installation of SMs [81].
Figure 2.8: Remote management system for electricity measurement
2.4 Optimal Control
The optimization problem consists of choosing a set of parameters that maximizeor minimize a function. In the particular case of control engineering applications, suchgiven function is called cost function. Considering the problem of finding the minimumof a function f : Rn → R, that is to find a point x∗ ∈ Rn such that f (x∗) ≤ f(x) forall x ∈ Rn.
23

The situation demands a deeper analysis if constraints are present. Let Gi : Rn →R, i = 1, 2, . . . , k be a set of smooth functions with Gi(x) = 0 representing a certainconstraint. The objective is the same as before, it is to find x∗ ∈ X that minimizesf(·) without violating Gi(x
∗) = 0. As it will be presented in Section 2.5.1, MPC designconsiders this particular situation.
2.4.1 Optimization without constraints
Unconstrained optimization deals with minimizing a performance index `(u) byselecting a proper control signal, u ∈ Rm. Before proceeding, it is recommendable toexpand the performance index by writing the Taylor series:
d` = `Tudu+1
2duT `uudu+O(3) (2.6)
where O(3) represents terms of order three and higher, `u , ∂`∂u
represents the gradient
and `uu , ∂2`∂u2
the Hessian matrix.The clue idea behind optimization is to determine the value of u that results in a
minimum value of `(u), and that is accomplished when the gradient of the function isequal to zero. Hence,
`u = 0 (2.7)
for a critical point. The curvature matrix `uu has to be further analyzed to determinewhether it is a minimum, maximum or a saddle point.
2.4.2 Optimization with constraints
In control engineering applications, a performance index has to be selected andoptimized constrained to the system dynamics. In such conditions, let the scalar per-formance index be `(x, u) a function of the control vector u ∈ Rm and the state vectorx ∈ Rn. The optimization problem is to determine a control vector u which minimizesthe performance index `(x, u) and at the same time satisfies the following equalityconstraint equation:
f(x, u) = 0 (2.8)
Now, starting as it was done in the unconstrained optimization methodology, aTaylor series expansion for the performance index is developed. Thus, considering onlyfirst order terms for an approximation of the equations corresponding to ` and f at thecritical point:
d` = `Tudu+ `Tx dx = 0 (2.9)
df = fudu+ fxdx = 0 (2.10)
dx = −f−1x fudu (2.11)
24

Substituting (2.11) into (2.9), it is obtained:
d` =(`Tu − `Tx f−1
x fu)du (2.12)
∂`
∂u
∣∣∣∣df=0
=(`Tu − `Tx f−1
x fu)T
(2.13)
∂`
∂u
∣∣∣∣dx=0
= `u (2.14)
`u − fTu f−Tx `x = 0 (2.15)
An alternative method to obtain (2.15) is to include the constraints in the perfor-mance index for defining the Hamiltonian function:
H(x, u, λ) = `(x, u) + λTf(x, u) (2.16)
By further expanding the Hamiltoninan function and performing a similar analysisas developed in Eqs. (2.9) to (2.15), it is possible to conclude that necessary conditionsfor a minimum point of `(x, u) that also satisfies the constraint f(x, u) = 0 are:
∂H
∂λ= f = 0 (2.17)
∂H
∂x= `x + f txλ = 0 (2.18)
∂H
∂u= `u + fTu λ = 0 (2.19)
These three equations serve to determine x, λ and u. In most applications de-termining the value of the Lagrange multipliers λ is not of interest, but this valueis required, since it is an intermediate variable that allows determining u, x and theminimum value of the performance index `. The Algorithm 2.1 presents a method forsolving optimization problems with constraints using the steepest descent algorithm,see reference [82] for details.
Algorithm 2.1 Numerical solution method - Steepest descent algorithm
1: Select an initial value for u2: Determine x from system’s dynamic equation f (x, u) = 03: Determine λ = −f−Tx Lx4: Determine the gradient vector, Hu = Lu + fTu λ5: Update the control vector, ∆u = −αHu, where α is a constant
6: Determine ∆L = HTu . If ∆L is small enough, stop. Otherwise, go to
step 2
25

2.4.3 Dynamic programming
Dynamic programming (DP) is a useful mathematical technique for making asequence of interrelated decisions optimal. It provides a systematic procedure for de-termining the optimal combination of decisions [83]. In contrast to linear programming,there is not a standard mathematical formulation of the DP problem. Rather, DP is ageneral type of approach to problem solving, and the particular equations used mustbe developed to fit each situation. The objective is to minimize a certain cost of amathematical expression of what is considered an undesirable outcome.
DP is considered a basic stochastic problem with a model presented in [84], whosemain characteristics are:
• An underlying discrete-time dynamic system;
• A cost function that is additive over time.
Equations (2.20) and (2.21) hold the above mentioned features:
xk+1 = f (xk, uk, wk) (2.20)
Jk(xk) = E
[gN (xN) +
N−1∑k=0
gk (xk, uk, wk)
](2.21)
where xk is the state taking values in some set Xk, uk is the control to be selected froma finite set Uk (xk), wk is a random disturbance, f is a given function, Jk is the costfunction that must be optimized over a sequence of the control signal and E representsthe expected value.
It is assumed that each wk is selected according to a probability distribution thatmay depend on xk and uk, but not on previous disturbances. As stated, the optimiza-tion is performed over the allowed set of control signals u0,u1, . . . ,uN−1, whose valueonce a closed-loop control strategy has been selected becomes: µ0(x0), . . . , µN−1 (xN−1).Therefore, the optimal cost function value over an allowable policy in a set Π, wouldbe:
J∗ (x0) = minπ∈Π
Jπ (x0) (2.22)
Principle of optimality
Let π∗ = µ∗0, µ∗1, . . . , µ∗N−1 be an optimal policy for the basic problem, Eqs.(2.20) and (2.21), and assume that when using π∗, a given state xi at time i occurswith positive probability. Consider the subproblem whereby system’s state is xi at timei and it is desired to minimize the cost-to-go, which is the cost of going from time i totime N,
26

Ji = E
[gN (xN) +
N−1∑k=i
gk (xk, uk, wk)
]Then the truncated policy π∗i = µ∗i , µ∗i+1, . . . , µ
∗N−1 is optimal for this subprob-
lem. The principle of optimality suggests that an optimal policy can be constructed inpiecemeal fashion.
According to the principle of optimality and considering that for every initial state,x0 the optimal cost J∗ (x0) of the basic problem is equal to J0 (x0), corresponding tothe last step of the following recursive algorithm, which proceeds backward in timefrom period N − 1 to period 0:
JN (xN) = gN (xN)
Jk (xk) = minuk∈Uk(xk)
E [gk (xk,uk,wk) + Jk+1 (f (xk,uk,wk))] (2.23)
where the expectation is taken with respect to the probability distribution of wk,which depends on xk and uk. Furthermore, if u∗k = µ (xk) minimizes the right side ofEq. (2.23) for each xk and k, the policy π∗ = µ∗0, µ∗1, . . . , µ∗N−1 is optimal. Once andadmissible policy π ∈ Π is adopted, the following sequence of events is envisioned atstage k:
1: The controller observes xk and applies uk = µ (xk)2: wk is generated according to a given distribution P (·|xk, µk (xk))3: The cost gk (xk,uk,wk) is incurred and added to previous costs
4: The next state xk+1 = f (xk,uk,wk) is generated
5: If k = N − 1, add the terminal cost gN (xN), otherwise increment kand return to step 1
2.5 Model-based controllers
2.5.1 Model predictive control
MPC is an optimal control algorithm capable of managing constraints over itsstructure. Figure 2.9 shows the receding horizon idea, which is the basic concept fordesigning an MPC. At time kT the output measurement y(k) is obtained, from itscaptured value a reference trajectory r(t|k) is proposed, whose objective is to returnthe system’s response to the setpoint s(t). An accurate model reference of the plant isneeded, so it is possible to predict the system response over a prediction horizon, Np toan optimal predicted control input u(k+ i|k), where k < i < k+Nc, Nc represents thecontrol horizon and u(k +Nc − 1|k) = u(k +Nc − 1 + i|k) for Nc < i < Np. Variables
27

Figure 2.9: Concept of receding horizon strategy [3]
y(t|k) and yf (t|k) in Figure 2.9 represent the predicted system output when applyingthe control sequence u(k), and the open loop response of the system, respectively.
In spite of the controller conception, the use of an open loop model response aspart of the control strategy could mislead us in thinking that only stable processes canbe controlled with this algorithm; there are many useful techniques for stabilizing themodel and even strengthen the control algorithm under model uncertainties [3, 85].
Most MPC designs are formulated in discrete-time1 setting with a fixed samplingperiod, Ts. Since the majority of applications in the electric power field, e.g. powerelectronics, governors design, etc., are better described by nonlinear dynamic relations,a convenient discrete-time state-space representation for the system to be controlled is
xk+1 = f (xk,uk) , k ∈ 0, 1, 2, ... (2.24)
where xk represents the state vector and uk is the plant input. MPC offers the possi-bility of including constraints into its structure, for which case both xk and uk are tobe restricted according to:
1A discrete-time system is obtained through a discretization process, where it is involved the conceptof sampling. The idea of sampling consists of defining a discrete-time system such that its trajectoriescoincide with the trajectories of the continuous-time system at the sampling times: t0, t1 . . . , tk fork ∈ R+
0
28

xk ∈ X ∈ Rn (2.25)
uk ∈ U ∈ Rm (2.26)
A cost function has to be selected for the controller design. The following choiceencompases many alternatives documented in the literature [86]:
J (xk,u(k)) = F(xk+Np
)+
k+Nc−1∑i=k
L (xi,ui) (2.27)
where F (·) and L(·) are weighting functions intended to penalize the predicted systembehavior.
The MPC algorithm has the capability of performing a constrained minimizationof (2.27) to find an optimal control sequence, U(k) = u(k),u(k+1), ... u(k+Nc−1).A less general approach for a linear time-invariant (LTI) system, with a quadratic formcost function, generally known as linear quadratic case, and an additional integratorfor eliminating steady-state errors in closed-loop is presented in [87], and it is adaptedhere as follows:
xm(k + 1) = Amxm(k) + Bmu(k) (2.28)
y(k) = Cmxm(k) (2.29)
∆xm(k + 1) = Am∆xm(k) + Bm∆u(k) (2.30)
∆xm(k) = xm(k)− xm(k − 1) (2.31)
∆u(k) = u(k)− u(k − 1) (2.32)
x(k + 1) = Ax + B∆u(k) (2.33)
x(k) =
[∆xm(k + 1)
y(k + 1)
](2.34)
A =
[Am 0Tm
CmAm 1
](2.35)
B =
[Bm
CmBm
](2.36)
y(k) =[
0m 1]x(k) (2.37)
where Am, Bm, Cm and xm represents the state matrix, input matrix, output matrixand state vector of the model, respectively. The augmented model in state-space thatincludes the integrator is represented by A, B, x and ∆u. MPC uses this explicitmodel to predict future trajectories of system states and outputs. This predictioncapability allows to solve OCPs online, where prediction error and control input actionare minimized over Np. The optimization yields an optimal control sequence as inputand only the first input from the sequence is used as the input of the system, while thewhole optimization procedure is repeated each sampling step. The final aim of MPC
29

is to provide zero output error with minimal control effort. Designing an MPC withconstraints is equivalent to solving a quadratic programming problem in order to findthe parameter vector ∆U, which minimizes a cost function J subjected to inequalityconstraints, as it is shown next:
J = [Rs−Fx (ki)]T−2∆UTΦT [Rs − Fx (ki)]+∆UT
(ΦTΦ + R
)∆U(2.38)
Γ ≥ M∆U (2.39)
u(k) = u(k − 1) + ∆u(k) (2.40)
F =[
CA CA2 CA3 · · · CANp]T
(2.41)
Φ =
CB 0 · · · 0
CAB CB · · · 0CA2B CAB · · · 0
......
......
CANp−1B CANp−2B · · · CANp−NcB
(2.42)
Kff =[
1 0 · · · 0] (
ΦTΦ + R)−1
Φ
11...1
(2.43)
Kfb =[
1 0 · · · 0] (
ΦTΦ + R)−1
ΦF (2.44)
where R = rwINc×Nc and rw is used as a tuning parameter for the desired closed-loop performance. Rs is a vector with length Np that allows a comparison betweenreference signal and model output, where it is assumed that the reference is constantin Np. M ∈ R(2Np+4Nc)×Nc and Γ ∈ R(2Np+4Nc)×1 are adequate matrices that representevery constraint in matrix form. Hildreth’s quadratic programming algorithm is usedin this research work for updating the control law of the linear MPC.
2.5.2 Nonlinear model predictive control
The idea of linear or nonlinear MPC is to utilize a model of the process to predictand optimize the future behavior of the system. A generalized nonlinear discrete-timemodel of the system was defined in (2.24) and is rewritten here:
xk+1 = f (xk,uk) (2.45)
where f : Rn × Um → Rn assigns xk+1 ∈ Rn at the next time instant to each pair ofstate xk ∈ Rn and control signal uk ∈ Rm. The main objective of MPC is to control thestate xk of the system towards a reference trajectory rk and keep the system’s statesclose to this reference. Without loss of generality, the reference trajectory is consideredconstant and an equilibrium point of the closed-loop system is defined by:
xk+1 = f (xk, µ(xk)) (2.46)
30

where µ(·) : Rn → Rm is the closed-loop control law obtained with the NMPC algo-rithm.
A set of finite control sequences is obtained after the optimization process:u0,u1, . . . ,uN−1 for N ∈ N being the optimization horizon. Therefore, given an initialvalue x0 ∈ X and a control sequence u(·) ∈ UK a trajectory of Eq. (2.45) is obtainediteratively via:
ux0 = x0 (2.47)uxk+1 = f (uxk,uk) (2.48)
where uxk is the predicted state of the system when the optimized control sequenceu(·) ∈ UK is applied . One of the strengths of MPC in general, is its ability to manageconstraints in its structure. Therefore, it is necessary to define valid numeric sets forthe states of the system, as it was shown in Eqs. (2.25) and (2.26).
There is also an attached task to the main objective of NMPC, related to stability.Let x∗ be an equilibrium point for (2.45), i.e. f (x∗) = x∗. The equilibrium point willbe locally asymptotically stable if there exist η > 0 and a function β ∈ KL2 such thatthe inequality:
‖xk − x∗‖ = β (‖x0 − x∗‖ , k) η (2.49)
holds for all x0 ∈ βk(x∗) and all k ∈ N, where ‖·‖ represents an Euclidean norm.
Asymptotic stability is included in the desired properties of a closed-loop NMPC sys-tem; whenever the system is close to the reference it is desired to stay close to it or tomove towards the equilibrium.
NMPC Algorithm
An important consideration while designing NMPC is to consider that the ref-erence signal is desired to move the system states towards an equilibrium point, x∗
of the closed-loop system. The cost function to be used for the optimization process,will penalize the difference between the state of the system and the equilibrium point,‖xk − x∗‖. It is also desirable to penalize the control signal u ∈ U in order to getefficiency in the energy consumption of the system to be controlled. Therefore, the costfunction will have the form: ` : X× U→ R+
0 , whose value outside the equilibrium will
2The following comparison functions are defined in [88]:
K := α : R+0 → R+
0 |α is continuous and strictly increasing, α(0) = 0K∞ := α : R+
0 → R+0 |α ∈ K, α is unbounded
L := δ : R+0 → R+
0 |δ is continuous and strictly decreasing with limt→∞
δ(t) = 0
KL := β : R+0 → R+
0 |β is continuous, β(·, t) ∈ K, β(r, ·) ∈ L
31

be positive. A typical choice for ` meeting the above-mentioned requirements is thequadratic function:
`(x,u) = ‖x‖2 + λ ‖u‖2 (2.50)
for a reference signal r = 0 = x∗, while for r 6= 0, the cost funcion ` should berepresented by::
`(x,u) = ‖x− x∗‖2 + λ ‖u‖2 (2.51)
According to the design criteria presented, the closed-loop requisites and the wellknown objective of an MPC controller, the NMPC algorithm for a constant reference,r is given by [89]:
Algorithm 2.2 NMPC algorithm
1: Measure if possible, otherwise estimate system’s state: xk ∈ X2: Set x0 = xk and solve the following optimal control problem:
3: minimize
JN (x0,u(·)) =N−1∑k=0
` (uxk,uk)
subject to
uxk+1 = f (uxk,uk)
xk ∈ Xxmaxxmin⊂ X
uk ∈ Uumaxumin
⊂ U
4: Define µ (xk) = u∗(0)
Section 2.4 presents details on how to solve an OCP. The OCP is called feasible foran initial value x0 whenever the set uN(x0) over which the optimization is performedis nonempty.
2.5.3 Model reference adaptive control
MRAC implements a closed-loop controller that involves the parameters thatshould be optimized, in order to modify the system response to achieve the desiredfinal value. The adaptation mechanism adjusts the controller parameters to match theprocess output with the reference model output. The reference model is specified as theideal expected behavior that the system should achieve. Figure 2.10 shows a generalMRAC structure.
In this research, the MRAC is designed using the Lyapunov theory methodology.The mathematical procedure of this methodology begins with the error equation [4]:
e = yprocess − yreference = Gp × u−Gref × uc (2.52)
32

Figure 2.10: MRAC structure [4]
where e, yprocess, yreference, Gp, u, Gref and uc represent the error, process output,reference output, process model, process input, reference model and controller signal,respectively.
For a second order system, the implemented MRAC scheme has two adaptationparameters: adaptive feedfoward gain θ1 and adaptive feedback gain θ2. These param-eters will be updated to follow the reference model. Then, the input is rewritten interms of the adaptive feedforward and adaptive feedback gains as follows:
u = θ1 × uc − θ2 × yprocess (2.53)
The Lyapunov stability theorem establishes the following: If there exists a functionV : Rn → R being positive definite and its derivative:
dV
dt=∂V T
∂x
dx
dt=∂V T
∂xf(x) = −W (x) (2.54)
is negative semidefinite, then the solution x(t) = 0 to
dx
dt= f(x) f(0) = 0 (2.55)
is stable. If dVdt
is negative definite the solution will be asymptotically stable. V denotesthe Lyapunov function for the system. If
dV
dt< 0 and V (x)→∞ when ||x|| → ∞ (2.56)
the solution is globally asymptotically stable.To design an MRAC using Lyapunov theory, the first step is to derive a differential
equation for the error that contains the adaptation parameters. Then, a Lyapunovfunction and an adaptation mechanism need to be established to reduce the error tozero. The Lyapunov derivative function dV
dtis usually negative semidefinite. Therefore,
determining the parameter convergence is necessary to establish persistently excitation
33

and uniform observability on the system and the reference signal [90]. The proposedLyapunov function is quadratic in tracking error and controller parameter estimationerror because it is expected that the adaptation mechanism will drive both types oferrors to zero. By defining the error dynamics, the proposed Lyapunov function can bechosen as:
de
dt= − 1
a1r
d2e
dt2− a0r
a1r
e+bra1r
(θ1 − 1)uc −bra1r
θ2yp (2.57)
V (e, θ1, θ2) =1
2
(a1re
2 +brγ
(θ1 − 1)2 +brγθ2
2
)(2.58)
where br, γ and a1r > 0. Eq. (2.58) will be zero when the error is zero and the controllerparameters are equal to the desired values. The above Lyapunov function is valid ifthe derivative of this function is negative. Thus, the derivative of Eq. (2.58) is:
V = a1rede
dt+brγ
(θ1 − 1)dθ1
dt
brγθ2dθ2
dt(2.59)
Substituting (2.57) in the above equation and rearranging similar terms, it isobtained:
V = −ed2e
dt2− a0re
2 +1
γ(brθ1 − br)
(dθ1
dt+ γuce
)+
1
γ(brθ2)
(dθ2
dt− γyprocesse
)If the adaptation parameters are updated as:
dθ1
dt= −γuce and
dθ2
dt= γyprocesse (2.60)
then,
V = −ed2e
dt2− a0re
2 (2.61)
It can be seen that (2.61) is negative semidefinite which implies V (t) ≤ V (0). Thisensures that e, θ1 and θ2 are bounded. Since a1r > 0, a0r > 0 and uc is bounded, thenyreference is bounded and therefore yprocess = e+ yreference is bounded as well. From theboundedness and convergence set theorem it can be concluded that the error e will goto zero [90].
To overcome the limitations of the simple MRAC structure, i.e. smaller faultaccommodation threshold than the MRAC in combination with other controllers, aclassic PID controller expressed in the form:
PID = Kp +Ki
s+Kds (2.62)
is introduced in the feedforward loop of the simple MRAC scheme, as it is described in[91].
34

2.6 Fault-tolerant control
Critical-safety and operability issues with a defined performance in technologicalsystems such as electrical, industrial, aircraft control, nuclear generation, etc., causethem to rely on complex control systems. Classic controllers are well defined for guar-anteeing stability and desired performance around an operating point (steady-state).Nevertheless, these control schemes under faulty scenarios are incapable of maintaininga desired performance or even worse, to guarantee stability. Therefore, it is necessaryto design control systems with fault-tolerance capabilities in these systems in order toimprove the reliability and availability while providing a reasonable performance.
To avoid serious damages to machines and humans, faults have to be detectedas quickly as possible and decisions that stop the propagation of their effects mustbe taken. Many books and research papers related to the field of FTC coincide on atwo-step methodology for making a system fault-tolerant [92, 93, 5]:
1. Fault diagnosis: Whenever a fault is present in the system it has to be detectedand identified.
2. Control re-design: The controller has to be designed with the ability to accom-modate failts on components automatically.
This methodology is an active research field, mainly due to the variety of pos-sibilities for executing the above-mentioned steps. From a design point of view, faultdiagnosis is done by an FDD module, while control re-design could be done by many dif-ferent control approaches, such as model-based, intelligent, gain-scheduling, etc. Suchan FTC system, which relies on the fault information obtained from the FDD module,is called an active fault-tolerant control system (AFTCS). Figure 2.11 shows a typicalarchitecture of an AFTCS [5].
Figure 2.11: A general structure of an AFTCS [5]
35

A major concern when designing an FTC is the system performance in a faultyscenario. Two criteria can be considered: to recover the original system performanceand to accept some degree of performance degradation. In practice, in the case of asensor fault, the original system performance could be recovered if there is hardwareredundancy and the faulty sensor is isolated; another approach with analytical redun-dancy is also possible through the use of estimators or observers. However, in the eventof an actuator fault, the degree of the system control redundancy and the availableactuator capabilities are reduced [5].
Since model-based approaches have been chosen for controller design through-out this research, fault-tolerance schemes will be adapted to MPC. MRAC is a hybridFTC between passive fault-tolerant control system (PFTCS) and AFTCS; any responsechange from the model reference due to disturbances, model uncertainty or faults pro-duce control signal adaptation for model following; in this case no FDD module isneeded. As pointed out in [94], integration of performance monitoring and diagnosiswith MPC for industrial applications is an open research area. From a practical pointof view, predictive controllers seem to offer very good possibilities for FTC throughconstraints management, e.g. if a sensor fails it is possible to abandon control of thatoutput by removing the corresponding output from the cost function, J . Any otherfault could be represented by changing the constraints, e.g. an actuator jam should berepresented changing its corresponding control signal rate constraint, |∆uj| = 0. Thiscontroller configuration is particularly advantageous due to the fact that the controlsignal is computed at each sampling time, making it possible the controller re-designwhen a fault has occurred. Nevertheless, an accurate post-failure model is needed andan FDD design is the main challenge in this particular case.
MPC with fault-tolerance has been designed for aircrafts [95], where an infiniteprediction horizon is considered, while a finite control horizon is used for optimizationpurposes. An augmented model, where the inclusion of steady-state control signalsand states, is the clue for regulation purposes, since any deviation from the equilibriumpoint will cause the control signal to retrieve the system to the equilibrium point,always considering predefined constraints on control signals and states. A simple pole-placement strategy is also used for signal tracking purposes. It is assumed that anFDI system provides correct information about the status of the actuators to both:target calculation and MPC schemes. Another approach for fault-tolerance on MPC ispresented in [96], where constraints management is done under faulty scenarios.
FDD module design
The FDD module is a block that performs two specific functions:
1. Fault detection: This function should be continuously performed, in real time, toguarantee a reliable alarm generation when a fault or multiple faults are presentin the system. Many techniques have been developed for this purpose, e.g. veri-fication of a threshold or multiple thresholds, parity space, principal componentanalysis (PCA), intelligent approaches (neural and Bayesian networks), etc.
36

2. Fault diagnosis: This is an extended feature of the previous function. Generally apost-failure model or fault magnitude estimation is required by a reconfigurationmechanism in order to change the parameters of the controller for accommodatingthe fault. Many techniques are extensively studied in the literature, such as:Kalman filter, observers, pattern recognition, etc.
Figure 2.12 shows a classification of FDD methods. In the upcoming subsections,two techniques are described: parity space and Kalman filter, since they are used foran FDD module design in an FTC framework developed in Chapter 4.
Figure 2.12: Classification of FDD methods [5]
Parity space
Functions of diagnostic systems are separated in two parts: a residual generationmodule and a residual evaluation module. Dynamic control systems have two broadfault types: sensor and actuator faults. In the case of sensor faults, they are oftenhandled through estimation of the faulty output signal using an estimator based onother variables measurements, where the required action is to disregard the faulty signaland replace it with an estimated one or another measurement coming from a healthysensor. For an actuator fault which does not cause a complete loss of command, aremedial action could be to modify the control signal to the set of actuators by anincrement computed in such a way that the fault is compensated. In this particularcase, an estimation of the fault is required and techniques such as analytical redundancyrelations (ARR) by their own or combined with other techniques are quite suitable forthis task.
Parity space technique is a particular case of ARR [92], whose methodology is tobe explained considering the following state-space model:
x(t) = Ax(t) + Bu(t) + Exd(t) + Fxf(t) (2.63)
y(t) = Cx(t) + Du(t) + Eyd(t) + Fyf(t)
37

where x ∈ Rn is the state vector, u ∈ Rm represents the inputs of the system, y ∈ Rp
stands for the measured plant output signals, d ∈ Rnd is a disturbance input vectorand f ∈ Rnf is an unknown input vector representing faults.
A residual generation for the measured inputs and outputs is defined as follows:
r(t) =
q∑i=1
Wy,iy(i)(t) +
q∑i=1
Wu,iu(i) (2.64)
where ·(i)(t) denotes the ith derivative of a variable, Wy,i and Wu,i are matrices to bedetermined for acomplishing the following criteria:
r(t) =
0 ⇐⇒ f(t) = 0p ∈ R 6= 0 ⇐⇒ f(t) 6= 0
(2.65)
Kalman filter
Kalman filters (KF) have been widely studied since the publication of the seminalpaper in 1960 [97]. KF is a very powerful statistical approach used to infer the valueof a signal y(t) = x(t) + η, where η represents Gaussian noise, at a particular timet = t1, where t1 could be less than, equal or greater than t. In the particular case oft1 < t, KF performs data-smothing. When t1 = t, a filtering operation is executed;and when t1 > t, a prediction feature is to be carried out by the KF. All the threementioned operations could be done even when the precise nature of the modeledsystem is unknown.
Since KF methodology can be found in many references [92, 93, 97, 98], it isnot the intention of this subsection to give many details on it, but to present mainequations for implementing it and to explain the way it could be used for FDD moduledesign and implementation.
Consider the linear time-invariant (LTI) state-space model:
x(k + 1) = Ax(k) + Bu(k) + w(k) (2.66)
y(k) = Cx(k) + v(k)
where, as before x ∈ Rn, u ∈ Rm and y ∈ Rp are respectively the state vector, thevector of control signals and the vector of measured output signals, w is the vector ofstate noise, v denotes the measurement noise.
Noise vectors are independent Gaussian process that have the following properties:
E
[(w(k)v(k)
)]= 0
E
[(w(k)v(k)
)(w′(l) v′(l)
)]=
(Qw Qwv
Q′wv Qv
)δkl (2.67)
38

The problem to be solved consists in estimating the system statefrom observed values
[y(k − k0) y(k − k0 + 1) . . . y(k − 1) y(k)
]and[
u(k − k0) u(k − k0 + 1) . . . u(k − 1) u(k)].
It is convenient to define a priori state estimation x− ∈ Rn at step k, given priorknowledge to step k of the observed values of y and u, and a posteriori state estimateat step k, x ∈ Rn given the measurement of y(k). Therefore, priori and posteriorierrors are defined as follows:
e−(k) , x(k)− x(k)− (2.68)
e(k) , x(k)− x(k) (2.69)
A priori estimate error covariance and a posteriori estimate error covariance aredefined as follows:
P−(k) = E[e(k)−eT (k)−
](2.70)
P(k) = E[e(k)eT (k)
](2.71)
A formulation for the posteriori state estimation is then formulated:
x(k) = x(k)− + K(k)(y(k)−Cx(k)−
)(2.72)
whose formulation resembles an observer. Certainly a KF is an optimal observer. GainK(k) is also called blending factor and its purpose is to minimize the a posteriori errorcovariance, Eq. (2.71). This optimization procedure, whose details are not presentedhere, can be done by substituting (2.72) into the definition of the error, Eq. (2.69),performing the corresponding expectation operations, taking the derivative of the traceof the result with respect to K, setting the result equal to zero and finally solving theequation for K. One particular form of K that minimizes (2.71) is given by:
K(k) = P(k)CT(CP(k)−CT + Qv
)−1(2.73)
Eqs. (2.70) to (2.73) have to be recursively solved. A summary, in the form of analgorithm for implementing a KF is presented:
KF can be applied to nonlinear systems, through a linearization about the currentmean and covariance. This particular approach is called as extended Kalman filter(EKF) and is an approximation of the optimality of Bayes’ rule.
FDD could be done with KF in two steps: residual generation and residual eval-uation. For residual generation, let us consider the model:
x(k + 1) = Ax(k) + Bu(k) + Fdd(k) + Ff f(k) + w(k) (2.74)
y(k) = Cx(k) + Edd(k) + Ef f(k) + v(k)
where d ∈ Rnd is a vector of unknown input signals or disturbances and f ∈ Rnf is avector of unknown input signals representing the faults to be detected.
39

Algorithm 2.3 Kalman filter algorithm
1: Initialize x− = x0 and P = P0
2: Calculate the a priori error covariance
P(k)− = AP(k − 1)AT + Qw
3: Compute the Kalman gain
K(k) = P(k)CT(CP(k)−CT + Qv
)−1
4: Perform the state estimation
x(k) = Ax(k − 1) + Bu(k − 1) + K(k)(y(k)−Cx(k)−
)5: Update the error covariance
P(k) = (I−K(k)C) P(k)−
6: Return to step 1
A natural approach for residual generation with KF is:
r(k) = y(k)−Cx(k) (2.75)
According to [92], the residual of (2.75) is a zero mean withe noise vector sequencewhich is not affected by u and d, once the transient due to initial conditions hasvanished. Due to the Gaussian nature of r(k), many statistical techniques, e.g. test ofhypotheses, Bayes theorem, etc., are classically applied for residual evaluation in orderto achieve fault detection and diagnosis. One of the most commonly used is test ofhypotheses, whose null and alternative hypotheses are:
H0 : r(k) ∼ N(0,CPCT + Q0
)→ f(k) = 0 (2.76)
H1 : r(k) ∼ N(f ,CPCT + Q1
)→ f(k) 6= 0 (2.77)
Further analysis to r(k), such as the so-called cumulative sum (CUSUM) are alsoapplied with good results. See references [99, 100] for more details.
40

Chapter 3
Microgrid modeling
Control engineering most of the times is model dependent. Understanding theprocess, system or plant to be controlled is fundamental for proposing proper controlstrategies. This chapter presents modeling procedures of the microgrid componentsused throughout this research: DEG, WTG, PV array, BSS, and power converters. Atthe end of this chapter a microgrid benchmark model is also presented, which integratesthe microgrid components in one single simulation environment.
Many approaches on microgrid modeling have been analyzed in research works[101, 102, 103]. DG units are mainly modeled independently and its accuracy dependon the application; few contributions have been made in modeling an entire microgridsystem [104, 105, 106]. This research is linked with control engineering, thereforecontrol models are a main concern and this chapter will be focused on the modelingand integration in a microgrid of the following elements:
• RES, such as wind and solar energy sources
• BSS
• Microgeneration units, e.g. DEG
• Power converters
Figure 2.7 shows the aforementioned elements in a microgrid configuration. Therationale for the SGs lies in the integrative analysis of DERs, many of which will beintermittently operating, with the deployment of short-term and long-term storagesystems. Current strategies on load-sharing will not work to integrate RES due toits peak-power and intermittent operation [107]. Therefore, new control strategies forvoltage/reactive-power and load-sharing/frequency need to be developed; microgridmodeling is the first steep prior advanced controllers design.
3.1 DG units modeling
A DG unit is conformed mainly of three components:
41

1. Microgeneration unit. Typical choices are: batteries, PV, WTG, flywheels, fuelcells, etc.
2. Power conditioning system (PCS). PCS is related with power conversion, ac/dcor dc/ac and its control techniques.
3. Coupling circuit. Interface elements, most of the times a filter, for coupling theDG unit with the network.
Figure 3.1: DG unit block diagram
Not all DG units have the architecture depicted in Figure 3.1, since a DEG or aCHP station will have different architectures. What is common (or with little changes)for every architecture is the coupling circuit between vinv,abc and vo,abc, whose model is:
vinv,abc = LdiL,abcdt
+ vo,abc (3.1)
iL,abc = io,abc + iC,abc = io,abc + Cdvo,abcdt
(3.2)
vovinv
= G(s) =Z(s)
Z(s)CLs2 + Ls+ Z(s)
G(s) =1
LCs2 + LZ(s)
s+ 1(3.3)
In order to simplify the model obtained in (3.3), the output current, io, will beconsidered as a perturbation signal and also a damping voltage, vd, is added in orderto get frequency stability in the model.
vd = RdiC (3.4)vovinv
=1
CLs2 + CRds+ 1(3.5)
42

Figure 3.2: Nonlinear circuit coupling block diagram
Figure 3.3: Circuit coupling block diagram with frequency stability
Figure 3.4 shows the frequency response for different values of Rd. Values of Rd
greater than 1 reduces significantly the maximum overshoot, Mp, giving also stabilityto the model.
3.2 Power electronic converters
Proper integration technology has to be developed for using DG units in a micro-grid configuration. Although some generators can be connected directly to the electricpower grid, such as wind power driven asynchronous induction generators, there is atrend to adopt power electronics based interfaces which convert the power firstly to dcand then use an inverter to deliver the power to the 60 Hz ac grid [108, 109].
Power electronic converters performing conditioning have to be highly efficient,flexible and reliable. It is well known that increasing systems efficiency could be doneimproving power converters performance. According to Figure 3.1 there are mainlythree power electronic circuits that need to be implemented in order to control voltage,power and frequency output of a DG unit: ac/dc converter, dc/dc converter and voltagesource inverter (VSI).
43

−1 −0.5 0 0.5 1 1.5 2 2.5 3
−50
0
50
100
log(ω ×
√
LC)
Magnitude of frequency response Eq. (3.4) (dB)
R
d = 0.1
Rd = 1
Rd = 5
Rd = 10
−1 −0.5 0 0.5 1 1.5 2 2.5 3
−150
−100
−50
0
log(ω ×
√
LC)
Phase of frequency response Eq. (3.4) (deg)
R
d = 0.1
Rd = 1
Rd = 5
Rd = 10
Figure 3.4: Frequency response of the model (3.4) for various values of Rd
3.2.1 Three-phase rectifier
Rectifiers can be classified in different ways: uncontrolled versus controlled, single-phase versus multiphase, half-wave versus full-wave or phase-controlled versus pulsewidth modulated (PWM) [110]. Throughout this work a three-phase, full-wave andphase-controlled rectifier will be used. Figure 3.5 shows the power electronic circuitof the mentioned rectifier. Silicon controlled rectifiers (SCRs) are used in the rectifierinstead of diodes. Each SCR must be turned on by a gate signal in each cycle ofthe supply voltage. Under the continuous conductance condition, the average outputvoltage, Vo, of a controlled rectifier is given by [111]:
Vo =3
πVll(peak) cos (αf ) (3.6)
where αf is the firing angle of the SCRs.
44

Figure 3.6 presents simulation results of the three-phase rectifier for different firingangles. The parameter values for this test are the following: Vll = 220∠0 [V ], f =60 [Hz], Rload = 1 [Ω], Lload = 5× 10−3 [H] and E = 0.
Figure 3.5: Three-phase controlled rectifier
3.2.2 dc/dc power converters
There are mainly three types of dc/dc converters: buck, boost and buck-boost.Buck mode converters are used in applications where a reduced dc voltage than theone fed into the input is needed. Boost mode converters are able to increase the outputvoltage. Buck-boost mode converters are able to increase or decrease the output voltagewith the particularity of presenting opposite polarity of the main source. Figure 3.7shows a schematic representation of these converters, where the generic switch could bereplaced by an SCR, gate turn-off thyristor (GTO), insulated-gate bipolar transistor(IGBT), etc.
The operation of the above-mentioned dc/dc converters is described as follows. Inthe buck mode, when the switch is in position 1 for uTsw seconds, the output voltage issupplied directly by the dc source, Vin while the capacitor and the inductor are storingenergy. Once the switch changes its position to 0 and keeps this state for (1− uTsw)seconds, the energy stored in both the capacitor and the inductor will discharge throughthe load. The duty factor is denoted u, 0 < u < 1 and Tsw is the switching period.It is possible to maintain the output voltage at a desired level, lower than Vin, byappropriately controlling the switching position. In the boost mode, when the switchis in position 1, the circuit is separated in two halves: on the left, the source is chargingthe inductor, meanwhile the capacitor on the right maintains the output voltage usingpreviously stored energy. When the switch changes its position to 0, both the dcsource and energy stored in the inductor will supply power to the circuit on the right,hence boost the output voltage. This operating mode and the buck-boost mode usesimilar criteria on switching concepts, therefore u and Tsw have the same meaningas before. It is also possible to maintain the output voltage at a desired level bycontrolling the switching sequence. In the buck-boost mode, switch positions 1 and 0represents charging and discharging modes of the inductor. Appropriately controllingthe switching sequence can result in output voltage higher or lower than the dc source.
45

0 0.2 0.4 0.6 0.8 10
50
100
150
200
250
Time ( s )
Output volt age of t he r ect ifier
α = 0
α = 30
α = 60
α = 85
0 20 40 60 800
50
100
150
200
250
α (deg re e s )
Output volt age vs α (V)
(a) (b)
Figure 3.6: (a) Rectifier output voltage; (b) Rectifier voltage dependence on α
Buck converter model:
iR = iL − iC (3.7)
vC(t) =1
C
∫iCdt; L
diL(t)
dt= uVin − vC(t)
dvC(t)
dt= − 1
RCvC(t) + iL(t) (3.8)
diL(t)
dt= − 1
LvC(t) +
1
LuVin (3.9)[
dvC(t)dt
diL(t)dt
]=
[− 1RC
1− 1L
0
] [vC(t)iL(t)
]+
[0
1Lu
]Vin (3.10)
46

Figure 3.7: Dc-to-dc converters: (a) buck; (b) boost; and (c) buck-boost
Boost converter model:
iR = iL − iC (3.11)
vC(t)
R= (1− u) iL(t)− CdvC(t)
dtdvC(t)
dt= − 1
RCvC(t) +
1
C(1− u) iL(t) (3.12)
diL(t)
dt= −1− u
LvC(t) +
1
LVin (3.13)[
dvC(t)dt
diL(t)dt
]=
[− 1RC
1C
(1− u)− 1L
(1− u) 0
] [vC(t)iL(t)
]+
[01L
]Vin (3.14)
Buck-boost converter model:
dvC(t)
dt= − 1
RCvC(t) +
1
C(1− u) iL(t) (3.15)
diL(t)
dt= −1− u
LvC(t) +
1
LuVin (3.16)[
dvC(t)dt
diL(t)dt
]=
[− 1RC
1C
(1− u)− 1L
(1− u) 0
] [vC(t)iL(t)
]+
[0
1Lu
]Vin (3.17)
3.2.3 Voltage source inverter
Depending on the type of supply source, inverters can be classified as VSI and cur-rent source inverters (CSI). VSIs are the most common interface for integrating DERs.Integrating RES, e.g. PV arrays or WTG, to the main grid or into a microgrid is mainlydone through a combination of rectifiers and inverters (power conditioning), allowingthe microgeneration unit to operate at unity-power factor or any other leading/laggingpower factor.
Figure 3.8 shows a bridge type IGBT inverter. Two modes of operation can bedistinguished: the square-wave mode, loosely related to the phase-control in rectifiers,
47

and the PWM mode. The resultant shape of the output voltage characterizes thesquare-wave operating mode; a specific sequence of inverter states is imposed. In thecarrier-based sinusoidal PWM method (SWPM), three phase sinusoidal waves are usedfor the modulating signals, also called control signals, and they are compared with ahigh frequency triangular wave [112]. Considering:
vA = Vm sin (ωt)
vB = Vm sin
(ωt− 2
3π
)(3.18)
vC = Vm sin
(ωt+
2
3π
)the ratio between the amplitudes of the carrier signal and the control signal is calledmodulation index,
m =VmVc
(3.19)
the fundamental rms component of the waveform of any leg of the bridge is given in[113] by:
V1 =mVdc
2√
2(3.20)
Figure 3.8: Bridge type IGBT voltage source inverter
Figure 3.9 shows the simulation results using SPWM for controlling the bridgeand the following parameters:
48

0.2 0.21 0.22 0.23 0.24 0.25−250
−200
−150
−100
−50
0
50
100
150
200
250
Time (s) (a)
V, A
Voltage & current m = 12
Phase voltage
Phase current
0.2 0.21 0.22 0.23 0.24 0.25−250
−200
−150
−100
−50
0
50
100
150
200
250
Time (s) (b)
V, A
Voltage & current m = 2
Phase voltage
Phase current
Figure 3.9: Inverter voltage and current output: (a) Leading power factor; (b) Laggingpower factor
• fsampling = 5 kHz
• Vsupply = 380 V
• Rw = 10× 10−3 Ω
• Lw = 1× 10−3 H
• m = 2 → Lagging power factor
• m = 0.5 → Leading power factor
Figure 3.9 shows the possibility of controlling the inverter power factor in bothlagging (inductive-load operation for generator notation, that is, the inverter absorbsreactive power) and leading (capacitive-load operation for generator notation, that is,inverter supplies reactive power) power factor operation. Only the modulation indexis modified in these simulations for achieving current control and power factor control.The output voltage magnitude can also be controlled by the dc link voltage Vdc.
49

A more efficient PWM approach could also be used, e.g. voltage space vectorPWM (SVPWM). Park’s transformation is used to represent the three-phase voltagesin a vectorized way [110]:
v = vd + jvq (3.21)[vdvq
]=
[1 −1
2−1
2
0√
32−√
32
] vAvBvC
(3.22)
Therefore, as the time (t) progresses, the voltage space vector, v, rotates withthe angular velocity ω in a plane defined by the orthogonal coordinates d and q. Therotating voltage vector describes the fundamental output voltages. The converter hasthree legs with IGBTs working in a complementary way, three switching functions, a, band c all of them binary, representing weather a switch in a leg of the inverter is turnedon or off, i.e. a = 1 or a = 0. Line to line and line to neutral output voltages can berepresented as [112]:
vABvBCvCA
= Vdc
1 −1 00 1 −1−1 0 1
abc
(3.23)
vANvBNvCN
=Vdc3
2 −1 −1−1 2 −1−1 −1 2
abc
(3.24)
Each state of the inverter produces a specific stationary voltage space vector (abc2),and the revolving vector, v has to follow a reference vector, v∗. Space vectors of line-to-line output voltage of the full-bridge inverter are shown in Figure 3.10. There are sixnonzero vectors, V1 (a = 1, b = 0, c = 0) to V6 (a = 1, b = 0, c = 1), whose mag-nitude equals the dc input voltage and two zero vector, V0 and V7. In implementingthe SVPWM, the reference voltage is synthetized by using the nearest two neighboringactive vectors and zero vectors.
3.3 Diesel engine generator
A diesel generator is the combination of a DE with an electrical generator toproduce electrical energy. Diesel generating sets are typically used in power systemswithout connection to the power grid, as emergency power supply if the grid fails, aswell as for more complex applications such as peak-shaving, grid support and energyexport to the power grid. This section presents models for the synchronous generatorand the DE.
50

Figure 3.10: Voltage space vector locations corresponding to different switching states
3.3.1 Synchronous machine model
The major electric power-generating source in the world is the synchronous gen-erator. There are two circuits magnetically coupled: the first one is static and has theshape of a hollow cylinder with longitudinal slots and an armature winding; the secondcomponent is the rotor whose winding is supplied with dc current. The dc currentis supplied to the field winding by an exciter, which may be a generator mounted onthe same shaft or a separate dc source connected to the field winding through brushesbearing on slip rings [114].
The machine shaft is driven by a prime mover, e.g. steam, hydraulic turbine orDE. The magnetic field produced by the field winding links the stator coils to inducevoltage in the armature windings as the shaft is moved by the prime mover. Figure 3.11shows three coils: Laa, Lbb and Lcc which represent the three armature windings on thestator and a coil Lff , which represents the distributed field winding on the rotor.
The following synchronous machine model has been adapted from [114] and [115]:
Ls = Laa = Lbb = Lcc (3.25)
−Ms = Lab = Lbc = Lca (3.26)
where Ls and Ms are the self and mutual inductance, respectively.
51

Figure 3.11: Schematic diagram of a synchronous machine
The mutual inductance between the field coil f and each of the stator coils varieswith the rotor position, θd, as a cosinusoidal function with maximum value Mf , so that:
Laf = Mf cos (θd) (3.27)
Lbf = Mf cos (θd − 120o) (3.28)
Lcf = Mf cos (θd − 240o) (3.29)
where θd is the angle between the d-axis and a fixed reference.Flux linkages with each of the coils a, b, c and f are due to its own current and
the currents in the other coils:
λa = Laaia + Labib + Lacic + Laf if = Lsia −Ms (ib + ic) + Laf if (3.30)
λb = Labia + Labib + Lbcic + Lbf if = Lsib −Ms (ia + ic) + Lbf if (3.31)
λc = Lacia + Lbcib + Lccic + Lcf if = Lsic −Ms (ia + ib) + Lcf if (3.32)
λf = Laf ia + Lbf ib + Lcf ic + Lff if (3.33)
If we consider a balanced three-phase system, then ia + ib + ic = 0, therefore:
λa = (Ls +Ms) ia + Laf if (3.34)
λb = (Ls +Ms) ib + Lbf if (3.35)
λc = (Ls +Ms) ic + Laf if (3.36)
52

If we include coil resistance, then the voltage drop in the coil from terminal a tocommon terminal o, va is:
va(t) = −Ria(t)−dλadt
= −Ria(t)− (Ls +Ms)diadt
+ ωMfIf sin (ωt+ θd0) (3.37)
Figure 3.12: Coupled windings of a synchronous machine
ea′ =√
2 |Ei| sin (ωt+ θd0)→ No load voltage
|Ei| =ωMfIf√
2(3.38)
δ = θd0 − 90o → Position of the q-axis
ea′ =√
2 |Ei| cos (ωt+ δ)
va = −Ria − (Ls +Ms)diadt
+ ea′ (3.39)
ia =√
2 |Ia| cos (ωt+ δ − θa) (3.40)
ib =√
2 |Ib| cos (ωt+ δ − θb) (3.41)
ic =√
2 |Ic| cos (ωt+ δ − θc) (3.42)
λf = LffIf −3Mf |Ia|√
2sin θa = LffIf +
√3
2Mf id (3.43)
id = −√
3 |Ia| sin θa (3.44)
Electric and mechanic equations (3.40) - (3.44) model a round-rotor synchronousmachine. Although, salient-pole machines are also of major interest. The three-phase
53

salient-pole machine has three symmetrically distributed armature windings and a fieldwinding on the rotor. Additionally, both machines round-rotor and salient-pole havethe same cosinusoidal mutual inductances given by Eqs. (3.27) - (3.29). Moreover,throughout each revolution of the rotor the self-inductances Laa, Lbb and Lcc of thestator windings and the mutual inductances Lab, Lbc and Lca between them are notconstant in the salient-pole machine but also vary as a function of the rotor angularposition θd. The equations of the salient-pole machine can be expressed in a simpleform by transforming the a, b and c variables of the stator into corresponding sets ofnew variables called the direct-axis, quadrature-axis and zero-sequence quantities. Thetransformation is given by matrix P, called Park’s transformation, where:
P =
√2
3
cos θd cos (θd − 120o) cos (θd − 240o)sin θd sin (θd − 120o) sin (θd − 240o)
1√2
1√2
1√2
(3.45)
[vd vq v0
]T= P
[va vb vc
]TConsidering the above-mentioned modeling procedure and Park’s transformation,
in [116] is presented a state-space model using the dq dynamic equations of the electricalcircuit of a synchronous generator with a pure resistive load (RL) connected to itsterminals, whose results are summarized as follows:
Ldx
dt= Ax + BvF (3.46)
x =
idiqiF
A =
− (Rs +RL) ωLs 0−ωLs − (Rs +RL) −ωLm
0 0 −RF
L =
Ls 0 Lm0 Ls 0Lm 0 LF
B =
001
where
[id iq iF
]Tare the dq stator and field currents, respectively; Rs and RF are
the stator and field resistances; Ls, Lm, and LF are the stator, magnetizing, and fieldinductances; ω is the electrical speed; vd and vq are the dq stator voltages; and vF isthe field voltage which will be used as a control input.
54

3.3.2 Diesel engine model
For a complete dynamic simulation of the DE, a large order model would berequired, although for the purposes of this research (frequency control of the grid),a simpler model will be enough. Figure 3.13 shows a block diagram of the DE. Theactuator block is modeled by a first-order system with a gain Ka and a time constant Ta.On the other hand, the DE block contains the combustion system and it is responsiblefor the movement of the pistons and in consequence the crankshaft will generate a torqueT (s) in the shaft. Some research papers [117, 6] use a time delay e−τs and a torqueconstant Kb for modeling this block. The flywheel block is an approximation of theinertia dynamics generated inside the machine, η represents the flywheel accelerationconstant and the coefficient δ represents friction. State x1(t) represents the amountof fuel injected to the DE. The output, x2(t) represents the angular velocity of theengine’s shaft. d(s) is used for modeling load changes (as perturbations) in the rotor’sshaft, e.g. larger mechanical power demanded from the synchronous generator due toa connection of an electrical load.
Figure 3.13: Classic diesel engine block diagram [6]
Kau(t) = Tasx1(t) + x1(t)
x1(t) = − 1
Tax1(t) +
Ka
Tau(t) (3.47)
sx2(t) = −δηx2(t) + ηKbx1 (t− τ)
x2(t) = ηKbx1 (t− τ)− δηx2(t)
x(t) =
[− 1Ta
00 −δη
]x(t) +
[0 0ηKb 0
]x(t− τ) +
[Ka
Ta
0
]u(t) (3.48)
Model (3.48) is a continuous time-delay state space representation that needs to bediscretized for digital control purposes. Many approaches for input-delay discretizationhave been proposed [118, 119], although a simpler solution for the purposes of thisresearch is presented in [120], whose methodology has been adopted. Characteristicvalues of the DE constants of model (3.48) are taken from [117] and listed in Table 3.1,for whose case it is obtained:
55

x(k + 1) = x(k) +
n1∑i=1
(A0Ts + A1Tsµ (z−1))i
i!x(k) (3.49)
+
∫ T
0
((A0t+ A1tµ (z−1))
i
i!
)B0dt u(k)
A0 =
[−8 00 −0.03
]A1 =
[0 0
0.345 0
]B0 =
[80
]n1 = 20;
x(k + 1) =
[0.6703 00.0142 0.9985
]x(k) +
[0.32970.0030
]u(k) (3.50)
Table 3.1: System parameters of a typical DE
System parameter Value range Nominal valueActuator gain constant Ka (pu) 1.0 1.0Actuator time constant Ta (s) 0.05 − 0.2 0.125Engine torque constant Kb (pu) 0.8 − 1.5 1.15Engine dead time τ (s) 0 − 1 0.5Plant and flywheel accel δ
(s−1)
0.1 − 0.5 0.3Friction coefficient η (pu) 0.1 0.1
A simulation has been conducted in Simulink using the Simpower Systems libraryfor a synchronous generator with a diesel engine as a prime mover. Figure 3.14 shows theSimulink block diagram and Figure 3.15 shows the simulation results. The frequencyof the system as well as the voltage magnitude of the generator are shown.
Figure 3.14: Simulink block diagram for a synchronous generator with a diesel engine asprime mover
56

0 0.002 0.004 0.006 0.008 0.010
0.2
0.4
0.6
0.8
1
Time ( s )
Volt age amplit ude (pu)
0 1 2 3 40.98
0.985
0.99
0.995
1
1.005
1.01
1.015
1.02
Time ( s )
Fr equency r esp ons e (pu)
(a) (b)
Figure 3.15: (a) Synchronous generator frequency; (b) Synchronous generator voltage output
3.4 Wind-driven generation system
This section presents details on the modeling of a wind-driven electricity gener-ation system (WEGS), where a horizontal axis WT has been chosen as prime moverand an induction generator for energy conversion. This combination of WT and asyn-chronous machine is the most commonly WTG found in commercial versions for gen-erating powers ranging from a few kilowatts to 3 MW. Combinations of several WTGform the so-called wind farms, with generation capacities up to 200 MW [121].
The wind turbine induction generator is an attractive DG unit in a deregulatedelectric energy market since wind energy is a non-polluting source. Wind energy is airin motion whose energy is derived from sun, because about 2% of the solar flux fallingon earth’s surface is transformed into wind due to uneven heating of the atmosphere.
57

However, wind energy also has some limiting characteristics such as: non-schedulability,uncontrollable, etc. To obtain relatively constant power, variable blade pitch anglecontrols are installed [122, 123, 124]. A WT model is proposed in the mentionedreferences, where a PID algorithm for blade pitch control is used. In [124] the operatingcondition of the WT is classified into three regimes: startup regime, sub-rated powerregime and rated power regime. In this research, dynamic simulation and controllerdesigns are developed at the rated power regime.
3.4.1 Wind turbine model
The WT model used throughout this research is a lumped mass one, i.e. it doesnot model the double mass phenomenon [125]. The turbine is pitch controlled throughthe blade pitch angle, β. The power coefficient, Cp characterizes the WT which isfunction of the tip speed ratio, λ = ΩR
Vwand β. Where R is the WT rotor radius, Ω
is the mechanical angular velocity of the WT rotor and Vw is the wind velocity. Thepitch angle β is only varied to limit the over-speed of the generator. The wind speedis considered to be varying in the range of 10 to 20 m/s during the simulations.
Cp (λ, β) = 0.5716 [116κ− 0.4β − 5] e−21κ + 0.0068λ (3.51)
κ =
(1
λ+ 0.08β− 0.035
β3 + 1
)The dynamic output mechanical torque of the WT, Tm is expressed as:
Tm =ρARCpV
2w
2λ(3.52)
where ρ is the air density and A represents the swept area by the blades.Figure 3.16 shows different Cp curves for different β values and for a linear λ swept;
it has also been represented different Tm characteristic curves when β = 0 at differentturbine speeds. It is seen from Figure 3.16 that when nominal 1 pu speed of the turbineis present a fraction of the nominal torque is extracted, whose value depends on theefficiency of the WT.
3.4.2 Induction generator model
The electrical equations of the induction generator model in the dq reference framecan be expressed in per unit as [101]:
vqs = rsiqs +ω
ωbψds +
p
ωbψqs (3.53)
vds = rsids −ω
ωbψqs +
p
ωbψds (3.54)
v′qr = r′ri′qr +
(ω − ωrωb
)ψ′dr +
p
ωbψ′qr (3.55)
58

0 2 4 6 8 10 12
−0.4
−0.2
0
0.2
0.4
0.6
λ
(a)
pu
Power coeffic ient
β = 0β = 10β = 15β = 20
0 0.5 1 1.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Turbine speed (pu)(b)
Mechanical torque β = 0
Vw = 6Vw = 8Vw = 12Vw = 14
Figure 3.16: (a) Cp of the WT for differente β; (b) Tm characteristic curves for β = 0
v′dr = r′ri′dr +
(ω − ωrωb
)ψ′qr +
p
ωbψ′dr (3.56)
p
ωbωr =
1
2H(Te − T0) (3.57)
Te = ψ′qri′dr − ψ′dri′qr (3.58)
where vs, vr, is, ir, ψs and ψr represent voltage, current and flux (index s stands forstator and index r for rotor); rs and rr are stator and rotor resistances; ωr is therotor angular speed; ωb is the base electrical angular velocity used to calculate theinductive reactances; H represents inertia moment, T0 is load torque and p denotes atime derivative operation.
In Figure 3.17 is shown a dynamic simulation of the system by solving the set ofequations (3.53) - (3.56). It can be observed that a transient behavior is present during
59

0 1 2−10
−8
−6
−4
−2
0
2
4
6
8
10
Stat or cur r ent (pu)
Time ( s )0 1 2
−10
−8
−6
−4
−2
0
2
4
6
8
10
Rotor cur r ent (pu)
Time ( s )0 1 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Time ( s )
Rotor sp eed (pu)
(a) (b) (c)
Figure 3.17: Step response of the induction machine modeled with Eqs. (3.53) - (3.56). (a)Stator current; (b) Rotor current; and (c) Rotor speed
the first 0.8 seconds, for achieving a steady-state operation, after it the rotor speed isalmost 1 pu since it is an induction machine.
3.4.3 WEGS simulation
Turbines in the 1.5 to 2 MW range dominate land-based supply, though furtherdevelopments into the multi-MW range lies into the offshore designs. In this research,an onshore WTG is selected.
The simulations of WTGs conducted in this research use information of a com-mercial WTG, whose main characteristics are shown in row number 10 of Table 3.2[126]. This WTG is selected for two main reasons: 1) power rating, 1.5 MW and 2) itspower conversion method uses an induction generator.
60

Table 3.2: Outstanding designs of WTG of leading manufacturers
Manufacturer Model Drivetrain
Power ra-ting (kW)
Diameter(m)
Tip speed(m/s)
Power con-version
1 Vestas V90 Geared 3000 90 87 Asynch2 GE Energy 2.5XL Geared 2500 100 86 PMG3 Gamesa G90 Geared 2000 90 90 DFIG4 Enercon E82 Direct 2000 82 84 Synch5 Suzlon S88 Geared 2100 88 71 Asynch6 Siemens 3.6 SWT Geared 3600 107 73 Asynch7 Acciona AW-119 Geared 3000 116 74.7 DFIG8 Goldwin ReP750 Geared 750 48 58 Induction9 Nordex N100 Geared 2500 99.8 78 DFIG
10 Sinovel 1500 Geared 1500 70 82 Induction
Figure 3.18: Simulink block diagram of a WEGS
Figure 3.18 represents the implemented block diagram, where a PID controller forthe blade pitch angle has been used. Dynamic simulation and the controller design areinvestigated in this work at rated power regime; therefore no torque control is needed.A four seconds simulation has been conducted (see Figure 3.19) in order to test thesystem functionality, leading to the following observations:
• Even though a Pref = 1.5 MW was used as set point for the blade pitch angle
61

0 1 2 3 4 5−1
−0.95
−0.9
−0.85
−0.8
−0.75
−0.7
Time ( s )
Mechan ical t orque of t he WT (pu)
0 1 2 3 4 5
−0.2
−0.1
0
0.1
0.2
0.3
0.4
Time ( s )
B lade p it ch angl β ( deg)
(a) (b)
Figure 3.19: (a) Tm of the WT; (b) β response of the WT
controller, a steady state error is present in the system. Many PID tuning tech-niques were used and no major improvements were observed. Therefore, anothercontrol algorithm must be designed and considering that a WTG model has beendeveloped, an MPC controller will be designed in following chapters.
• The wind velocity used in the simulation is an increasing ramp starting at a valueof 14 m
sand ending at 18 m
s. The resulting mechanical torque is negative; this
fact indicates that the WT is delivering energy to the grid.
• Power balance is achieved in the simulation. A fixed pure resistive load of 1 MWis connected in the system, and as we expected 1.5 MW are being delivered bythe WTG and the grid bus is consuming/contributing the rest of the power, i.e.it is acting as a dynamic load and also provides the required reactive power forthe WTG.
62

3.5 Photovoltaic generation system
PV power generation is a method of transforming solar radiation into direct cur-rent electricity using semiconductors that exhibit the PV effect. PV arrays employsolar panels composed of a number of solar cells containing PV material. Materialspresently used for PV include monocrystalline silicon, polycrystalline silicon, amor-phous silicon, cadmium telluride, and copper indium gallium selenide/sulfide. Due tothe increasing demand of RES, the manufacturing of solar cells and PV arrays haveadvanced considerably in recent years. A report made by researchers at the LawrenceBerkeley National Laboratory finds that the installed cost of PV systems declined bymore than 30 percent from 1998 to 2008, from 10.80 USD per watt to 7.50 USD/W[127]. Solar energy is a renewable, inexhaustible and ultimate source of energy. If usedin a proper way, it has a capacity to fulfill numerous energy needs of the world. Thepower from the sun intercepted by earth is approximately 1.8 × 1011 MW [128]. Thedisadvantage of PV is its non-schedulability and high dependency on weather condi-tions. Therefore, energy storage is highly required in order to provide reliability to PVpower generation configurations. An integral PV/BSS system is composed mainly ofPV array(s), battery(ies), power electronic converters and loads.
PV arrays are composed of PV cells, which are the most basic generation compo-nent in a PV system. Many research and application papers related to PV modeling andmaximum power point tracking (MPPT) algorithm development [129, 130, 131, 132]present similar modeling procedure of a PV array, whose details are summarized here.A PV cell is represented as a single-diode mathematic model, which is composed of acurrent source, Iph a non-linear diode and internal resistances, Rs and Rsh as shown inFigure 3.20.
Figure 3.20: Single-diode PV model
Applying Kirchhoff’s first law and a non-linear current relation of the diode shownin Figure 3.20, iD, it is possible to find the mathematical relationship of the PV current,
i(t) = iph − iD −V + iRs
Rsh
= iph − Is(eq
V +iRsAkT − 1
)− V + iRs
Rsh
(3.59)
63

where iph, Is, q, k, T, A, Rs and Rsh are the photocurrent, diode saturation current,Coulomb constant (1.602e−19 C), Boltzmann’s constant
(1.38× 10−23 J
K
), cell tempe-
rature (oK), P -N junction ideality factor, series and parallel resistances, respectively.Photocurrent depends on the solar radiation and cell temperature,
iph =S
Sref(iph,ref + CT (T − Tref )) (3.60)
where S is the solar radiation(Wm2
); Sref , Tref , iph,ref are the solar radiation, cell
absolute temperature and photocurrent in standard test conditions; CT is a temperaturecoefficient
(A
oK
).
Diode saturation current varies with cell temperature as follows:
Is = Is,refT 3
Trefe
qEgAk
(1
Tref− 1
T
)(3.61)
where Is,ref , is the diode saturation current in standard test conditions and Eg repre-sents the band-gap energy of the cell semiconductor (eV ).
A single PV cell produces an output voltage of less than 1 volt, therefore it isnecessary to string together a number of PV cells in series to achieve a desired outputvoltage. These cells are usually considered to have the same characteristics. Therelationship of the voltage and current of a PV array is described by the followingequation:
i(t) = Npiph −NpIs
(e
qAkT ( V
Ns+ iRs
Np ) − 1)− Np
Rsh
(V
Ns
+iRs
Np
)(3.62)
where Ns and Np represent the number of cells connected together in series and parallel,respectively. In order to test Eqs. (3.59) to (3.62), a 100 KW PV array using SunPowerSPR-305-WHT solar panel (305 W ), whose characteristics are detailed in [133], hasbeen formed. The array consists of 66 strings of 5 series-connected, connected in para-llel, leading to the following maximum output power, Parray = 66×5×305 = 100650 W.Figure 3.21 shows the I-V (current versus voltage) and P-V (power versus voltage)characteristics of the array.
3.6 Battery system modelation
An electrical battery is one or more electrochemical cells that convert stored chem-ical energy into electrical energy. It consists of a number of voltaic cells; each voltaiccell consists of two half-cells connected in series by a conductive electrolyte containinganions and cations. One half-cell includes electrolyte and the electrode to which anions(negatively charged ions) migrate, i.e. the anode or negative electrode; the other half-cell includes electrolyte and the electrode to which cations (positively charged ions)migrate, i.e. the cathode or positive electrode. In the redox reaction that powers the
64

(a) (b)
Figure 3.21: PV array electrical characteristics. (a) I-V curve; (b) P-V curve
battery, cations are reduced (electrons are added) at the cathode, while anions are ox-idized (electrons are removed) at the anode [134], further detail on the electrochemicalreaction can be found in [135].
Equivalent circuit of lead-acid battery
The lead-acid battery is the oldest type of rechargeable battery with a low energy-to-weigth ratio compared to other batteries technologies. Although, its low cost makesthis type of battery attractive for a variety range of applications. Lead-acid batteriesare fully charged if it is possible to measure an open-circuit voltage of fully dischargedbattery cell(s). The term discharged means that all free charges within the batteryare zero (battery capacitors are discharged) and the only voltage source is the cell(s)voltage, V0 [16].
A simple nonlinear Thevenin model has been adapted for mathematical modelingpurposes in [136, 137], whose objective is to design a discrete time estimator for theSOC of the battery. This model takes into account the dynamic response of the battery,which is influenced by the capacitive effects of the battery plates and by the charge-transfer resistance [138]. Figure 3.22 shows the equivalent circuit of a lead-acid battery.
State-space equations are defined in order to allow the design of control strategiesfor charge and discharge processes of the battery, leading to the following equations forthe discharge process (charge process is similar):
65

Figure 3.22: Nonlinear lead-acid battery equivalent circuit
V0 = Rdi(t) +1
C
∫[i(t) + iB(t)] dt
Vp(t) =1
C
∫[i(t) + iB(t)] dt
V0 = RdCdVp(t)
dt+
1
CiB(t) +
1
RdCV0
dVp(t)
dt= − 1
RdCVp(t)−
1
CiB(t) +
1
RdCV0 (3.63)
VB(t) = Vp(t)−RBiB(t) (3.64)
A linear (approximate) relationship between open circuit voltage and SOC is usedin several research papers [136, 137, 139], leading to an easier approach for the estima-tion of battery’s SOC:
S(t) =voc(t)− b
a(3.65)
where b is the battery terminal voltage when S(t) = 0 and a is obtained knowingthe value of b and voc at SOC = 100%. A battery discharge simulation have beenconducted in MATLAB whose battery voltage and SOC responses are shown in Figure3.23. Battery parameters were selected as the following: C = 40µF , Rd = 7.5× 10−3Ω,RB = 0.2Ω, and V0 = 2.003 V .
66

0.1 0.2 0.3 0.4 0.51.6
1.7
1.8
1.9
2
2.1
2.2
iB
(t) (A)
(a)
V
Battery voltage (discharge)
Battery Voltage
Capacitor Voltage
0.1 0.2 0.3 0.4 0.585
90
95
100
iB
(t) (A)
(b)
%
State of charge
Figure 3.23: Battery discharging process simulation. (a) Battery voltage; (b) State of charge
3.7 Microgrid benchmark model
Integrating RES into a distribution network is challenging task. Therefore, a firststep for developing such an integration framework is to have a testing platform. Ref-erences [140, 141, 142, 143] present details on the development of a testing platform tosimulate the two different operating modes of a microgrid. Benchmark models of LVand MV distribution networks with DG are presented, where comprehensive informa-tion about the models development is given.
Operate a microgrid within the limits of the established operation standards de-mands the development of new operation strategies. According to the standard ANSIC84.1, utilities are required to maintain voltage at the customers service panel be-tween 114 and 126 V (±5%) based on a 120V nominal secondary voltage. StandardIEEE 1547-2-2011[144] recommends that for interconnecting DERs with electric powersystems, the total time should be less than 0.15 seconds when the magnitude of thefrequency variation exceeds 0.5 Hz and the magnitude of the voltage variation exceeds5%.
67

Figure 3.24: Microgrid MV benchmark model CIGRE TF C6.04.02
Since the definition of a microgrid includes the possibility of two operating modes:grid-connected and islanded, the operating strategy of a microgrid must ensure thatcritical loads receive service priority during the operation of the network. During grid-connected operation, for example if power quality is unacceptable an upstream switchwill produce and intentional island, although intentional islanding operations could
68

Table 3.3: Load parameters of the benchmark microgrid model
Load No. Load Type Pmax (pu) Qmax (pu)
1 Residential 0.15000 0.031002 Industrial 0.05000 0.010003 Residential 0.00276 0.000694 Industrial 0.00224 0.001395 Residential 0.00432 0.001086 Residential 0.00725 0.001827 Residential 0.00550 0.001388 Industrial 0.00077 0.000489 Residential 0.00588 0.00147
10 Industrial 0.00574 0.0035611 Industrial 0.00068 0.0004212 Residential 0.00477 0.0012013 Residential 0.00331 0.0008314 Residential 0.15000 0.0300015 Industrial 0.05000 0.0170016 Industrial 0.00032 0.0002017 Industrial 0.00330 0.0002018 Residential 0.00207 0.00052
also be planned. During islanded operation the master generation unit is in chargeof regulating the voltage and frequency of the microgrid, as well as ensuring that thegenerated power covers the demand. If there is not enough power generation capacity,significant load shedding will be necessary.
3.7.1 Main characteristics of the benchmark model
Figure 3.24 shows the microgrid benchmark model configuration, consisting of twofeeders supplied by a distribution substation. A grid of RES is connected to the leftside feeder, including four PV array units, one WTG, two BSS, and one DEG. EveryDG unit has a DC.
The rated voltage level of the network is 20 kV. It is supplied from a 110 kVtransformer station. Most connections are made with cables, but there are also sectionsof overhead lines. It should be noted that in a large scale distributed constant circuit,the influence of propagation delay must be considered in the equivalent circuit of thetransmission line. However, in this microgrid the delay is ignored, since the wiringlength of the transmission line is shorter than 30 Km. The parameters of the network,the load and the DG units (in pu) were taken from [145] and are summarized in Tables3.3 and 3.4.
Maximum values of real and reactive power are specified in Table 3.3. Never-theless, variable load profiles have been generated for every load in the model; Homer
69

0 10 20
0
0.05
0.1
0.15
pu
0 10 20
0
0.01
0.02
0.03
0.04
0 10 20
0
0.5
1
1.5
x 10
−3
0 10 20
0
0.5
1
1.5
x 10
−3
0 10 20
0
0.5
1
1.5
2
2.5
3
x 10
−3
0 10 20
0
1
2
3
4
x 10
−3
0 10 20
0
0.5
1
1.5
2
2.5
3
x 10
−3
pu
0 10 20
0
1
2
3
4
5
x 10
−4
0 10 20
0
0.5
1
1.5
2
2.5
3
x 10
−3
0 10 20
0
1
2
3
4
x 10
−3
0 10 20
0
1
2
3
4
x 10
−4
0 10 20
0
0.5
1
1.5
2
x 10
−3
0 10 20
0
0.5
1
1.5
2
2.5
3
x 10
−3
pu
Time (h)
0 10 20
0
0.05
0.1
0.15
Time (h)
0 10 20
0
0.005
0.01
0.015
0.02
0.025
0.03
Time (h)
0 10 20
0
0.5
1
1.5
x 10
−4
Time (h)
0 10 20
0
0.5
1
1.5
2
x 10
−3
Time (h)
0 10 20
0
0.5
1
1.5
x 10
−3
Time (h)
Real
Reactive
Figure 3.25: Load profiles of the microgrid benchmark model
Energy [146] was used for this purpose, taking as base values: Pbase = 5 MW andVbase = 20 kV. Figure 5.1 shows the load profiles for every load in the model.
It is also a duty to develop a power flow analysis for the benchmark model; atfirst approach RES units have not been considered. As it was presented in section2.1.2, according to Kirchhoff’s current law, the current equation for the n-th node is asfollows:
In =∑m∈Tn
Inm (3.66)
Let I =[I1 I2 · · · IN
]and V =
[V1 V2 · · · VN
]be the vectors of the
node currents and node voltages, respectively. Then, with this notation and the relationInm = ynmVnm, the entire microgrid system can be written as:
I = YV (3.67)
70

Table 3.4: Transmission lines parameters
From ToR(
ΩKm
)X(
ΩKm
)C(nFKm
)L (Km)
Node Node0 11 2 0.579 0.367 158.88 2.822 3 0.164 0.113 6608 4.423 4 0.262 0.121 6480 0.614 5 0.354 0.129 4560 0.565 6 0.336 0.126 5488 1.546 7 0.256 0.13 3760 0.247 8 0.294 0.123 5600 1.678 9 0.339 0.13 4368 0.329 10 0.399 0.133 4832 0.77
10 11 0.367 0.133 4560 0.3311 4 0.423 0.134 4960 0.493 8 0.172 0.115 6576 1.30 12
12 13 0.337 0.358 162.88 4.8913 14 0.202 0.122 4784 2.99
Table 3.5: Initial parameters for power flow calculation of the microgrid benchmark model(pu)
V δ (deg)Generated Generated Real power React. power Bus Busreal power react. power consumption consumption No. type
1.0 0.0 0.0 0.0 0.0 0.0 0 Swing1.0 0.0 0.0 0.0 0.2 0.0410 1 PQ1.0 0.0 0.0 0.0 0.0088 0.0024 10 PQ1.0 0.0 0.0 0.0 0.2000 0.0470 11 PQ1.0 0.0 0.0 0.0 0.0003 0.0002 12 PQ1.0 0.0 0.0 0.0 0.0054 0.0026 13 PQ1.0 0.0 0.0 0.0 0 0 2 PQ1.0 0.0 0.0 0.0 0.0030 0.0021 3 PQ1.0 0.0 0.0 0.0 0.0043 0.0011 4 PQ1.0 0.0 0.0 0.0 0.0073 0.0018 5 PQ1.0 0.0 0.0 0.0 0.0055 0.0014 6 PQ1.0 0.0 0.0 0.0 0.0008 0.0005 7 PQ1.0 0.0 0.0 0.0 0.0059 0.0015 8 PQ1.0 0.0 0.05 0.0 0.0057 0.0036 9 PV
71

with the admittance matrix Y = [Yij]. Thus, the apparent power can be calculated asfollows:
Sn = Vn
N∑m=1
(YnmVm)∗ (3.68)
According to the node type (voltage controlled bus, PV or load bus, PQ), twovariables among (Pk, Qk, Vk, θk) of each node, will be chosen as constant and theothers are decided by the load flow Eqs. (2.4) and (2.5). In this network, the nodeselection has been done as shown in Table 3.5, where initial conditions for a steady-statecalculation are also shown.
3.7.2 Simulation results of the benchmark model
The microgrid architecture of Figure 3.24 has been implemented in Simulink. Twooperating modes are analyzed during this simulation, grid-connected and an intentionalislanded operation. For islanded operation CB-1 and CB-2 are opened at 02h00. Inislanded operation, the frequency leader of the microgrid is the DEG and it is assumedthat the WTG is generating an average power of 750 kW. Additionally, due to the hourof islanding (there is not sun light), there is no power coming from the PV arrays.
Figure 3.26 shows the voltage profiles of nodes 1 and 9 for the microgrid benchmarkmodel. Figure 3.27 shows the power generated by the DEG, WTG and PV1. It is seenfrom Figure 3.26 that despite of the variable generation of the RES (WTG and PVarrays) when the microgrid is operating in grid-connected mode, the voltage magnitudeis exactly what the grid’s voltage magnitude is. On the other hand, when the islandingoccurs, there is important voltage sag and since no control actions are performed thevoltage magnitude oscillates far from its nominal value.
72

0 5 10 15 20
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
1.02
1.04
Time (h)
Volt age amplit ude at Node-1 (pu)
0 5 10 15 20
0.86
0.88
0.9
0.92
0.94
0.96
0.98
1
1.02
Time (h )
Volt age amplit ude at Node-9
(a) (b)
Figure 3.26: Voltage profiles of nodes during the simulation: (a) Voltage magnitude at Node1; (b) Voltage magnitude at Node 9
0 4 8 12 16 20 24
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
DEG generated power (pu)
Time (h)0 4 8 12 16 20 24
0.11
0.12
0.13
0.14
0.15
0.16
0.17
0.18
0.19
0.2
WTG power (pu)
Time (h)0 4 8 12 16 20 24
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
PV1 power (pu)
Time (h)
(a) (b) (c)
Figure 3.27: Generated power from the DG units: (a) Power generated by the DEG; (b)Power generated by the WTG; (c) Power generated by the PV array
73

Chapter 4
Fault-tolerant control of a mastergeneration unit in a microgrid
This chapter presents a methodology for the design of model-based fault-tolerantcontrol strategies for a master generation unit (DEG), plugged into an islanded micro-grid consisting of a hybrid wind-diesel-photovoltaic power system with BSS. An MPCscheme with fault-tolerance and a model reference adaptive control (MRAC) schemecombined with a PID controller and a linear parameter varying (LVP) controller areselected for precise and stable voltage and frequency regulation in the DEG, by exploit-ing their flexibility and capability for handling constraints and fault-tolerance, whichis helpful for smart grids architectures to achieve reduced fuel consumption with anenhanced reliability in the operation of the microgrid. DCs for every DG unit are de-signed. A small microgrid configuration, based on the modeling procedure of Chapter3 is used as a study case for testing the proposed control algorithms.
Nomenclatureδ η friction of the DE shaft, flywheel acceleration constantTa τ time delay, actuator time constant of the DETm torque generated by the DEKa Kb actuator gain, torque constant of the DERs RF stator, field resistance of the generatorLs Lm Ms stator, magnetizing, mutual inductance of the generatorω ωm electrical angular speed, generator rotor angular speedid iq iF dq stator and field currentsvF field voltage of the generatorβ blade pitch angle of the WTΓ M constraint matrices of MPCKff Kfb feedforward, feedback reconfigurable gains of MPCγ θ1 θ2 MRAC parameters of adaptation, feedforward and feedback loops
74

4.1 Introduction
Microgrids are small-scale low voltage power systems with distributed energysources, storage devices and controllable loads, connected to the main grid or islanded.Nevertheless, microgrids have different operating characteristics than bulk power sys-tems such as lack of inertia, resistive lines and high penetration of RES. Microgenerationunits have emerged as an option to meet growing customer needs for electric power.Wind and sun are promising RES due to its cleanness and social impact motivated byenvironmental and economic issues. However, energy coming from RES has some limit-ing characteristics such as its variability due to weather conditions. In [76] is describedthe impact on power balance and grid frequency of microgeneration at low voltagelevels. To obtain relatively constant power, variable blade pitch angle controls are in-stalled in the wind turbines and maximum power point tracking (MPPT) techniquesare used for energy extraction in PV arrays.
There is a variety of contributions in the field of simulation and control of au-tonomous hybrid power systems, some of which are to be cited here. In [147] arepresented detailed models of the components of a hybrid wind-diesel power system aswell as a performance analysis under different operating conditions, i.e. different windvelocities, load changes, etc., where an IEEE type 1 AVR has been used for voltageregulation of the synchronous generator. A fully distributed control strategy for a mi-crogrid configuration integrating a WTG through a dc-link voltage control is studiedin [148], where a strategy of two loops (voltage and power) is designed. In [149] arobust control approach for long-term operation of a hybrid wind-diesel system is pre-sented, a linearized model of the entire system is proposed through the combinationof the subsystem models and it is used for the design of a centralized controller. AnMPC strategy has been used for a stand-alone wind energy conversion system in [150].Power extraction from hybrid wind-diesel power systems is studied in [151], where adynamic model of the power system is proposed in order to test a variable structurecontroller for speed control of the WT. An intelligent control approach, fuzzy integrallinear matrix equalities for maximum power extraction in variable speed WT into ahybrid wind-diesel-storage power system is presented in [19]. Hybrid power systemswith PV integration have also been studied in [152, 153, 154], where a varied range ofclassic control techniques are applied with good results on power stability and energymanagement.
Frequency and voltage regulation in interconnected electrical systems with mul-tiple generation sources are main control challenges in distributed generation systems.Many different approaches have been studied and proposed for grid-connected and is-landed microgrid operation. Grid-connected operation relies on main grid parametersand the majority of contributions are related with volt-var strategies through the useof capacitor banks and flexible ac transmission system (FACTS), although advancedcontrol strategies like adaptive controllers for voltage regulation at the generation unitare detailed in [155, 156]. On the other hand, islanded microgrid operation needs afrequency leader due to the high integration of RES whose intermittent characteristiccomplicates the use of traditional control schemes. Voltage and frequency regulation
75

for isolated generators are studied in some research papers. A sliding mode control forvoltage amplitude regulation of a stand-alone synchronous generator connected to aresistive load is presented in [116], while in [157] a frequency regulator for a microgridconformed by a DEG, a WTG, an aqua electrolyzer and a fuel cell through multiple PIcontrollers is proposed. LPV control strategies have also been used for similar cases,where a DEG is feeding a group of loads [158] and interconnected with RES forminga hybrid power system [159]. However, all the above-mentioned existing works do notconsider important issues on reliability and fault-tolerance of hybrid power systemsfor reliable electricity generation. This fact motivated the current research work to bepresented in this chapter.
4.2 Controllers design
Figure 4.1 depicts the hybrid wind-diesel-photovoltaic power system architecturewith BSS that is to be controlled, where DC stands for distributed controller, CB standsfor circuit breaker and ILVDCB for intelligent low voltage dc breaker whose detailson the design are presented in Appendix B. The microgrid was designed with HomerEnergy [146], which is a tool for designing and analyzing hybrid power systems. Detailson the microgrid design are described in Appendix A. An optimal microgrid architecturefor RES integration is obtained with Homer Energy, although assumptions of perfectcontrollers for microgeneration units are considered in the optimization process andneither transient behavior nor stability issues are considered in this design. To overcomethese drawbacks, the proposed control strategy is composed of five DCs, each one ofthem with specific tasks:
1. DC1. In order to compare the performance of the system, five different approachesare implemented in DC1:
• Classic controllers, an IEEE Type-1 AVR for the synchronous machine volt-age regulation and a PI controller for regulating the DE rotor speed;
• Two non-decoupled MPC controllers (one for the DE and other for the syn-chronous generator);
• Two non-decoupled MPC controllers, one of them with fault tolerance (theDE controller);
• Two MRAC controllers (one for every loop). For the DE speed control loopa combination of an MRAC and a PID controllers is used, while for thesynchronous machine voltage regulator a classic MRAC is implemented.
• Finally, two MRACs are used. An MRAC-LPV controller is implementedfor the DE speed control and a classic MRAC for the synchronous machine.
The above-mentioned controllers are in charge of regulating grid frequency andvoltage magnitude. Fault-tolerance has been added to the controllers’ structure,whose details are given in the following subsections. A DE is used as a prime
76

Figure 4.1: Hybrid wind-diesel-photovoltaic power system architecture with BSS
mover, which drags a synchronous generator at a constant speed. In an islandedconfiguration, the frequency is determined by the mechanical speed ωm whichis provided by the DE, while the voltage magnitude is set by the synchronousgenerator field current.
2. DC2 is regarded to power generation control of the WTG. An MPC for a limitedrange of the blade pitch angle, 0 < β < 15, has been designed. Out of this range,the control system is still stable, although with a degraded performance. TheWTG is tested in power-rated region of operation under a variable wind speedprofile.
3. DC3 controls a bi-directional ac/dc/ac converter to manage battery charge anddischarge. A three-phase, full-wave and phase-controlled (firing angle control ofthe SCRs) rectifier is used for ac/dc conversion, while for dc/ac conversion abridge type IGBT VSI controlled through SVPWM [112] has been implemented.Details about the operation and design of the power converters are presented inSection 3.2. A power factor of one is used in the control strategy. Bi-directionalarrows in Figure 4.1 denote bi-directional power flow, due to the charge anddischarge process of the batteries.
4. DC4 represents an MPPT circuit implemented in a dc/dc boost converter forpower extraction from the PV array. Switching duty cycle for the boost converteris optimized by the MPPT controller with the incremental conductance technique[160] and the addition of an integral regulator.
77

5. DC5 represents a bi-directional dc/dc converter and also is in charge of controllingpower conversion of the dc/ac converter which links the dc bus with node 3.
This distributed control strategy is non-coordinated and the main control ob-jectives are to keep voltage magnitude and frequency within acceptable bounds thatguarantee stability of the microgrid. A centralized control strategy that considers theentire network performance will be developed in Chapter 5, for which case the sameDC designed in this chapter will be used.
4.2.1 MPC design
The methodology described in Section 2.5.1 has been used for designing the MPC-based controllers, DC1 and DC2. The following parameters are adopted for the con-trollers’ design:
• DE rotor speed controller: One of the goals of the optimal integration of theDEG in the microgrid is to reduce fuel consumption, giving priority to the powercoming from RES. To achieve this objective, a constraint on the control signalis imposed (fuel injection to the DE), though this constraint can be softenedonline if more power generated by the DE is demanded. The maximum tolerablefrequency deviation is ±3% and a hard constraint for ωm is imposed accordingto this, and finally neither accelerations nor decelerations greater than a 50%rate are allowed, and a constraint for this requirement is also considered. All theparameters in the design and simulation are represented in per unit (pu).
Np = 20; Nc = 10; rw = 20
0 ≤ u ≤ 0.8
−0.5 ≤ ∆u ≤ 0.5
0.97 ≤ ωm ≤ 1.03
• Synchronous generator voltage magnitude controller: In order to increase therobustness of the system against model uncertainties, since a resistive load hasbeen considered in the synchronous machine model (3.46), a larger predictionhorizon than the preceding controller is used to assure system stability whencapacitive and inductive loads are connected into the system. The only hardconstraint is on the control signal, for avoiding saturation in the magnetic circuitof the synchronous generator.
Np = 50 Nc = 5 rw = 5
0 ≤ vF ≤ 2
• WTG power controller: A controller with a limited range of actuation, from 0to 15 degrees is used. A stable behavior is reached out of this range with this
78

design, although a degraded performance on settling time is obtained due to thenonlinear relationship between β and the power generated by the WTG.
Np = 20 Nc = 10 rw = 0.7
0 ≤ β ≤ 15
Fault-tolerance in the MPC structure
In order to provide fault-tolerance to the classic MPC, an FDD module is addedto its structure, and proper decisions regarding the information from the FDD modulehave to be taken. Therefore, a fault-tolerant MPC (FTMPC) is composed of the MPC,an FDD module and a reconfiguration mechanism as the general structure of an FTCsystem outlined in [5]. In the particular case of the DEG, the architecture used is shownin Figure 4.2.
Figure 4.2: Fault-tolerant MPC structure for the DEG control
A combination of the parity space technique [161, 162] and a Kalman filter (KF)[97] is proposed for the FDD module design. Since the reconfiguration mechanismrelies on the FDD module, it is important to guarantee an accurate fault detectionand diagnosis. The KF recursively estimates the DE’s actuator model, while the parityspace residual generator detects an actuator fault with high reliability, avoiding falsealarms and unnecessary control system reconfiguration if only the KF would be used.
79

For designing the parity space residual generator and the KF, the DE modelpresented in Section 3.3.2 is used. The parity space approach requires the addition ofthe faults to be detected into the fault free model represented by Eq. (3.48). In thisparticular case, the actuator fault model is represented by:
x(t) = A0x(t) + A1x(t− τ) + Bu(t)
y(t) = Cx(t)
A0 =
[− 1Ta
0
0 −δη
]A1 =
[0 0ηKb 0
]B =
[Ka
Ta
0
]C =
[0 1
]fTa = Ta + ∆Ta ∀ ∆Ta > −Ta (4.1)fKa = Ka + ∆Ka ∀ ∆Ka > −Ka (4.2)
x(t) =
[− 1Ta
+ ∆TaT 2a
0
0 −δη
]x(t) +
[0 0ηKb 0
]x(t− τ) +
[ Ka+∆Ka
Ta− ∆Ta
T 2a
(Ka + ∆Ka)
0
]
x(t) = A0x(t) + A1x(t− τ) + Bu(t) + F1f1(t) + F2f2(t) (4.3)
f1(t) = (x1(t)−Kau(t)) ∆Ta
f2(t) = u(t)∆Ka
F1 =
[Ka
Ta
0
]F2 =
[1Ta
0
]where fTa and fKa represent the faulty parameters of the DE actuator.
The parity space technique requires to find matrices Wω and Wu in order togenerate the residual, whose value is close to zero when there are not faults and underfaulty scenarios, an actuator fault of the DE in this case, a value different from zero.The residual discrete equation is determined as follows:
r(k) =k+σ∑i=k
Wy(i)y(i) +k+σ∑i=k
Wu(i)u(i) (4.4)
where σ represents the number of previous samples considered for the residual genera-tion, y = [ym(k), ym(k − 1), . . . , ym(k − σ)] and u = [u(k), u(k − 1), . . . , u(k − σ)].
A combination of the parity space technique and a Kalman filter (KF) is proposedfor the FDD module design. Since the reconfiguration mechanism relies on the FDDmodule, it is important to guarantee an accurate fault detection and diagnosis.
In Figure 4.3 is shown the FDD module response, when the microgrid of Figure4.1 performs the following events: 1) WTG ignition, 2) 0.5 MW load connection, 3)3-phase fault with duration of 0.5 seconds, and 4) actuator degradation of 50%. As canbe observed in Figure 4.3, even in the presence of other events different from an actuatorfault, mainly considered perturbations, the KF model estimation changes, though thereis no necessity of a model update for performing a controller reconfiguration. On the
80

Figure 4.3: FDD module dynamic response: (a) residual generator response; (b) DE ARXmodel estimation with KF (dashed lines represent true values of the ARX model)
other hand, the parity space residual generator gives a more confident result regardingfault detection, since the residual value, when an actuator fault is present, is larger thanthe other values of the residual under other dynamical changes, as it can be observed inFigure 4.3 (a). Therefore, the objective of combining these techniques is to guaranteethat the controller will be reconfigured using the model estimated by the KF only whenan actuator fault in the DE has occurred.
Summarizing the methodology, fault detection is done by the parity space tech-nique and the post-failure autoregressive model with external input (ARX) is estimatedby the KF; the FDD module operation is depicted in Figure 4.4.
Using the post-failure model estimated by the KF, the reconfiguration mechanismrecalculates the controller gains represented by Eqs. (2.43) and (2.44) and matrices Mand Γ using the methodology described in Section 2.5.1. Global variable declarationsfor gains and matrices Kff , Kfb, M and Γ are implemented in the controller blockin Simulink, so the updating process is performed as soon as the recalculation of thecontroller parameters is done. This controller configuration is particularly advantageoussince MPC computes the control signal at each sampling time, making it possible forthe controller to re-calculate its action when a fault has occurred. Performance basedon simulation results of the DEG working in the proposed microgrid configuration willbe analyzed in next section.
81

Figure 4.4: FDD module operation cycle
4.2.2 MRAC design
One of the main limitations of a simple MRAC structure is its smaller fault ac-commodation capability compared to an MRAC system in combination with otherstructures [163, 164]. To enhance its adaptive capability as an adaptive controller fora better fault-tolerant performance, it is a good practice to include a controller with agood performance in the feedforward loop of the MRAC scheme.
MRAC combined with a classic PID controller
To overcome the limitations of the simple MRAC structure, a classic PID controlleris introduced in the feedforward part of the simple MRAC, as it is shown in Figure4.5 where the control structure of the MRAC-PID for regulating DE speed (frequencyof the grid) is presented. The PID controller parameters were obtained by using agenetic algorithm (GA) pattern search to track a desired system trajectory with thehelp of the MATLAB Optimization Toolbox. GA searches and optimizes algorithmsby natural selection evolution. The simplest GA carries out the following steps: 1)generate a random initial population of chromosomes (potential solutions), 2) calculatethe fitness of every chromosome in the population, 3) apply selection, crossover andmutation, and 4) replace the actual population with the new population until therequired solution is achieved.
In this scheme, the desired closed-loop behavior of the system is establishedthrough a model reference trajectory when there is no fault in the system. The param-
82

Figure 4.5: MRAC-PID control structure for regulating DE speed
eters that need to be established for the desired optimization are shown in Table 4.1.Then, the GA obtains the best parameters optimization.
Table 4.1: (left) Parameters used in MATLAB Optimization Toolbox. (right) OptimizedPID gains using GA pattern search
Parameters Value
Step initial value 0Step final value 1Step time 0Rise time 7s% Rise 90Settling time 20s% Settling 5% Overshoot 20% Undershoot 2
Paramenter PID gains
Kp 3.8748Ki 2.6471Kd 1.9347
On the other hand, voltage regulation is done by manipulating field voltage ofthe synchronous generator through a classic MRAC structure. This control scheme isshown in Figure 4.6. MRAC offers the advantage of accommodating any deviation ofthe system from the response of reference model, either these are faults or perturbations.Therefore, an FDD scheme is not necessary for such an FTC system, making the FTCsystem simpler and relying heavily on the appropriate design of a reference model.
MRAC-LPV combined with a PID controller
LPV systems represent nonlinear systems with linear structures by including a setof varying parameters over time. These systems can be either represented in input-output or in state-space form, in continuous or discrete-time. The LPV state-spacerepresentation of a continous-time system is:
83

Figure 4.6: MRAC scheme for voltage regulation.
x = A (φ(t)) x + B (φ(t)) u (4.5)
y = C (φ(t)) x + D (φ(t)) u
where x ∈ Rn represents the state vector, y ∈ Rm is the measurement or outputvector, u ∈ Rp is the input vector, φ represents the parameters variation over time andA(·), B(·), C(·), D(·) are continuous matrix functions of φ.
An LPV system can be obtained through different methodologies. If the physicalrepresentation of the nonlinear system is the main concern, then the Jacobian lineariza-tion method, the state transformation method and the substitution function methodcan be used. The main objective of these methodologies is to hide the nonlinearityof the system in any variable in order to get the LPV representation. On the otherhand, if the model should be obtained from experimental data, the LPV model can beobtained using the least squares estimation for different operating points of the system[5].
LPV model of the DE
The LPV model of the DE can be represented as follows:
y
u=
1.15a
0.125bs+ 1e−0.5s (4.6)
a and b represent different degrees of actuator affectation. Using Pade’s approximationfor approximating the system delay e−0.5s = 2−Ts
2+Tsyields the following transfer function:
y
u=
1.15a
0.125bs+ 1
2− 0.5s
2 + 0.5s=
a (2.3− 0.575s)
0.0625s2 + (0.25b+ 0.5)s+ 2(4.7)
84

This transfer function has the following state-space representation:[yy
]=
[− (0.25b+0.5)
0.0625− 2
0.0625
1 0
] [yy
]+
[2.3a
0.0625− 0.575
0.0625
0 0
] [uu
](4.8)
By renaming φ1 = 0.25b+0.50.0625
and φ2 = a, Eq. (4.8) can be rewritten as:[yy
]=
[−φ1 −32
1 0
] [yy
]+
[36.8φ2 −9.2φ2
0 0
] [uu
](4.9)
The range of expected faults of the a and b restricts the variation of the φ1 andφ2 in the following ranges: φ1 = 12.2 < φ1 < φ1 = 13.2, φ2 = 0.7 < φ2 < φ2 = 0.95.Therefore, the system can be represented by two parameters and four vertices. Table4.2 shows parameters values of the LPV system.
Table 4.2: Parameter values of the LPV system
a = 0.95b = 1.05
a = 0.9b = 1.1
a = 0.85b = 1.15
a = 0.8b = 1.2
a = 0.75b = 1.25
a = 0.7b = 1.3
% fault 5% 10% 15% 20% 25% 30%φ1 12.2 12.4 12.6 12.8 13 13.2φ2 0.95 0.9 0.85 0.8 0.95 0.7
Rewriting (4.7), it is obtained:
y
u=
a (2.3− 0.575s)
0.0625s2 + (0.25b+ 0.5) s+ 2= a (2.3− 0.575s)
ξ
u(4.10)
ξ
u=
1
0.0625s2 + (0.25b+ 0.5) s+ 2(4.11)
The new state-space representation is:
[ξ
ξ
]=
[− (0.25b+0.5)
0.0625− 2
0.0625
1 0
] [ξξ
]+
[1
0.0625
0
]u (4.12)
y =[−0.575a 2.3a
] [ ξξ
](4.13)[
ξ
ξ
]=
[−φ1 −32
1 0
] [ξξ
]+
[160
]u (4.14)
y =[−0.575φ2 2.3φ2
] [ ξξ
](4.15)
The model reference adaptive controller for the DE is designed as follows:
85

GDE−LPV (s) =1.5× φ2
s(4.16)
The reference model, the feedforward update rule, and the feedback update ruleare represented as LPV systems in this control scheme. The feedforward and thefeedback update rule, Eq. (2.60) change to follow the reference model.
Figure 4.7: The proposed MRAC-LPV-PID control structure for regulating DE speed
In this proposed scheme, the desired closed-loop behaviour of the system is esta-blished through the model reference trajectory when there are no faults in the system.The parameters that need to be established for the desired optimization are shown inTable 4.1.
It is very important to mention that Gp and Gref represent the same model whenthe system is fault free. When a fault occurs, the system dynamics will change andmathematically it is represented by a change in Gp. The post-fault system will followthe behavior specified by Gref through adaptive adjustment of the MRAC to maintainthe same or as close as possible to the performance when there are no faults. This infact is the principal rationale of using MRAC for fault-tolerant control of the DE, andfor this FTC systems in general.
4.3 Simulation results
The system architecture shown in Figure 4.1 was implemented inMATLAB/Simulink R©. System parameters used in the simulation are shown inTable 4.3. Five different controllers were tested in the DEG (DC1), while maintainingfixed the controllers structure in DC2, DC3, DC4 and DC5. The first schemeimplemented was the baseline controller for speed and voltage control that MATLABhas in its library, i.e. governor and PI controller for the rotor speed control and theIEEE type 1 AVR for maintaining the voltage magnitude of the microgrid. As a secondapproach, an MPC without fault-tolerance is implemented. The third controller wasthe FTMPC. The MRAC-PID was also tested. Finally, in a different simulationscenario due to the particularity of LPV systems, the MRAC-LPV controller was
86

implemented. Variable profiles for wind velocity (m/s) and solar radiation (W/m2)were used during the simulation, as shown in Figure 5.5. Different operating conditionswere tested in order to evaluate and compare robustness of the controllers. Theseevents are shown in Figure 4.9, except for the case of the MRAC-LPV for whosesimulation six different DE’s actuator fault magnitudes were tested, as well as asudden load connection of 0.5 MW at Node-2 of the hybrid power system when 220seconds have elapsed and a 3-phase fault with duration of 0.5 seconds at 260 secondsof simulation is also applied at Node-3. Table 4.4 describes time occurrence of theactuator faults and its magnitude for the MRAC-LPV simulation.
Table 4.3: Hybrid wind-diesel system parameters
Parameter Value
Sampling time (models discretization) 50 msDEG power 2 MVAGrid voltage 220 VGrid frequency 60 HzWT nominal mechanical output 1.2 MWWT max power at base wind speed 0.85Base wind speed 12 m/sPV array 66 strings × 5 parallel series-cellsPPV cell 305 WPPV array 100 kWBSS (charging process) 50 kWBSS (discharging process) 150 kWBattery initial state of charge 80%Load-1 1.5 MWLoad-2 0.25 MWLoad-3 0.5 MWLoad-4 0.25 MW
Figure 4.10 shows the comparison of systems performance for the DEG. Both fre-quency (DE rotor speed) and voltage magnitude are shown for the above-mentionedcontrollers, except for the MRAC-LPV for whose case different simulation results areshown in 4.12 . It is remarkable from Figure 4.10 that the classic controller and theMPC without fault-tolerance lead the system to instability after the actuator fault hasoccurred. On the other hand, FTMPC and MRAC approaches are able to maintainsystem stability and to achieve satisfactory performance in maintaining desired syn-chronous generator output voltage and DE rotor speed for all the operating eventspresented in the simulation, which are contributed by the fault-tolerant capabilities ofthe FTCMPC and MRAC strategies proposed in this chapter. A slightly better per-formance is achieved with the FTMPC and this is due to high accuracy of the FDDmodule for fault detection and post-failure model generation in order to reconfigure theMPC controller.
87

Figure 4.8: (a) Wind velocity profile usend in the simulation; (b) Solar ratiation profileused used in the simulation
Figure 4.9: Simulation events for the IEEE-1+PI, MPC, FTMCP and MRAC-PID con-trollers
Apart from the important control objectives of voltage and frequency regulationin the microgrid, supply energy for the demand load,
DEGpower = Totalload power −WTGpower − PVpower ±BSSpower (4.17)
is also a very important task that must be satisfied in a microgrid operation. Extracting
88

Table 4.4: Simulated fault scenarios for testing the MRAC-LVP controller
Elapsed time Event
40 seconds 5% actuator fault70 seconds 10% actuator fault100 seconds 15% actuator fault130 seconds 20% actuator fault160 seconds 25% actuator fault190 seconds 30% actuator fault220 seconds 0.5 MW load connection260 seconds 3-phase fault, 0.5 s of duration
Figure 4.10: Comparison of the DE voltage magnitude for: (a) the MPC and PID; (b) theFTMPC and MRAC-PID. Comparison of the DE speed response for: (c) the MPC and PID;(d) the FTMPC and MRAC-PID.
power from RES implies making them work as near as possible to its maximum capacity.For this reason, power generation set points in DC2, DC3 and DC4 are: 1 MW of powergenerated by the WTG, 50 kW of power consumption when charging batteries and150 kW of generated power when contributing energy to the system, and 100 kW forthe PV array, respectively. Figure 4.11 shows the power generated by the DEG, WTG,PV and BSS, where it is possible to see that a correct power balance has been achieved;
89

Figure 4.11: Power generated by RES: (a) DEG; (b) PV array; (c) WTG; (d) BSS. Controlsignals for: (e) the DE speed control; and (f) voltage amplitude of the synchronous generator.
consequently a stable and reliable islanded microgrid operation can be guaranteed.Figure 4.12 shows simulation results of the performance of the MRAC-LPV con-
trol system for the simulation scenario described in Table 4.4. The frequency of themicrogrid is shown in figure (a), where it is possible to remark that this variable is keptclose to the reference (1 pu) even under the presence of the faults simulated (actuatorperformance degradation) in the actuator of the DE. The voltage magnitude, which isthe other control variable, is shown in figure (b); it is also remarkable the capacity ofthe control system to keep the voltage magnitude of the DE within acceptable bounds,with variations smaller than ±5% in this simulation.
Figures (c) and (d) represent the DE control signal (amount of fuel injected) andthe field voltage applied to the synchronous generator. The control system adaptationto the DE actuator faults due to the LPV modeling embedded in the control algorithm,allows the increment in the DE control signal in order to maintain system stability underthe presence of the faults of the DE actuator.
Figures (e) and (f) show the DE MRAC error and the voltage MRAC error inwhich it can be observed also that the tracking error remains without oscillation afterthe accommodation of the faults. Based on the results shown in the above figures, it
90

is possible to conclude that the MRAC-LPV controller has an inherent capability toaccommodate faults and perturbations. In addition, the Lyapunov theory implementedto design the MRAC controllers guarantees closed-loop stability, with also fault-tolerantcapability.
A brief summary of the main characteristics of the controllers tested in this chapteris shown in Table 4.5.
Table 4.5: Comparison of the main characteristics of the controllers
Robustness Fault-tolerance Constraints management Scalability
Classic control Low No No LowMPC Average No Yes HighFTMPC High Yes Yes HighMRAC-PID Very High Yes No HighMRAC-LPV Very High Yes No Medium
4.4 Conclusions
A fault-tolerant MPC strategy and an MRAC combined with a PID and an LVPcontrollers whose parameters were tuned using a GA have been developed in this paperfor controlling a DEG integrated as a master generation unit into an islanded microgridto maintain stability of voltage and frequency under different operating conditions ofthe microgrid and under faults in the DE actuator. Compared with a baseline controller,the developed controllers, FTMPC, MRAC-PID and MRAC-LPV achieved a signifi-cantly better performance in both voltage and frequency responses, while guaranteeingenergy supply from the DEG for the balanced load. A constrained fuel consumptionpolicy was implemented in the MPC for prioritizing energy coming from RES for cover-ing load demand. The controller reconfiguration used in the FTMPC leads to a simpleapproach that does not involve any switching operation, as in the case of gain schedul-ing techniques, which could lead to instability problems. Since MPC recalculates itsoutput at every sampling time, the reconfiguration operation would be another loopcalculation per se. On the other hand, MRAC has an inherent capability to accom-modate perturbations, faults and model uncertainties. However, the use of only thistype of controller has certain limitations. For this reason, MRAC was combined witha classic PID controller and an LPV controller to guarantee the system performance,to reduce the unknown model dynamics, disturbances and to have a better transientbehavior.
91

Figure 4.12: MRAC-LPV scheme simulation results
92

Chapter 5
A predictive energy managementstrategy for guaranteeing stableoperation of an islanded microgrid
This chapter presents the methodology of design of an optimal predictive controlscheme, which manages the batteries’ energy and performs a centralized load sheddingstrategy of an islanded microgrid. The controller avoids power unbalances due togreater load demands than the power generation capacity of the microgrid, and keepsthe voltage magnitude stability of the network. An NMPC is used for processing adata set composed by the batteries’ SOC, the DERs active power generation, and theforecasted load for identifying upcoming active power unbalances in order to initiateautomated load shedding over non-critical loads. The control strategy is tested ina medium voltage distribution system with DERs, simulated in Simulink using theSimpower Systems library. This control strategy is assisted by a DMS, which performsreal-time monitoring of the active power generated by the DERs and the current loaddemand at each node of the microgrid. Significant performance improvement is achievedwith the use of this control strategy over tested cases without its use. The balancebetween the power generated by the DERs and the load demand is maintained, whilethe voltage magnitude is kept within the established margin of ±5% recommended bythe standard ANSI C84.1-1989.
5.1 Introduction
Traditionally, electric power systems deliver energy from generation to consump-tion through transmission and distribution systems. That used to be the scenario whenevery appliance on the customer side just consumed energy. Nowadays, customers canalso be generators, and their consumption and generation should be carefully regulatedand controlled. One of the purposes of SGs is to secure the supply of continuous andquality service to the customers, which is expected to be achieved through a combina-tion of demand monitoring and control.
93

Due to the topological changes that distribution systems are experimenting,mainly due to the integration of RES, changes are needed in the way they are de-signed, operated and controlled.
In addition, integrating DERs into the distribution system is starting to pushelectric utility companies and researchers to develop new technologies. A power gridsolution described in [165], consists of a decentralized power system with a two-levelcontrol architecture that coordinates power flows generated by the DERs within a mi-crogrid. Reference [166] describes a central controller for microgrids, which optimizesthe microgrid operation when it is connected to the main power system. Similar ap-proaches of centralized microgrid controllers are presented in [167, 42]. Distributedcontrol strategies for the two operation modes of a microgrid: grid-connected and is-landed, with different techniques are studied in [168, 169, 41].
Keeping voltage within this bound requires the use of reactive power control tech-niques. During severe power system disturbances, the available control actions may notbe sufficient to maintain voltage. To counteract under system’s instability issues, spe-cial protective algorithms have been designed based on voltage limits, e.g. UVLS [170]schemes, which work in load shedding relays. Near the boundary, i.e. the maximumactive/reactive power the network can deliver to the load, sensitivities are of unusualvalues and small load increases imply very large voltage deviations. An uncoordinatedand non-optimal load shedding scenario is commonly performed in the system underthese circumstances. This fact, summed up with the necessity of a control strategythat guarantees a stable operation of a microgrid when it is operating in islandedmode, motivated the research to be presented in this chapter.
In Chapter 4, DCs with fault-tolerance were designed for controlling a DEG, in-stalled as a master generation unit in a microgrid. The control strategy to be proposed,monitors the DEG generation parameters to prevent imbalances between the generatedpower and the load, further expanding the local controller reliability. Additionally, theinformation generated by the FDD module developed in Section 4.2 is used for per-forming constraints management of the NMPC algorithm, when required, in order toaccommodate a degradation performance in the DE actuator while the microgrid isoperating in islanded mode.
5.2 Description of the simulation scenario
References [140, 141, 142, 143] present benchmark models of medium and lowvoltage distribution networks with DG. The benchmark models are analyzed in differentoperating conditions with and without the inclusion of storage systems, although nooptimal control techniques are proposed for managing loads and batteries to ensure areliable microgrid islanded operation. This chapter addresses this important topic.
A detailed guide of recommendations about the operation of islanded microgridsis presented in the Standard IEEE 1547.4-2011 [171]. The control strategy must ensurethat critical loads receive service priority when the microgrid operates in isolated mode.Islanding operation could be planned or could be the result of emergency conditions.
94

For example, a fault or another disturbance can cause tripping of breakers resultingin an intentional island. When islanding occurs in a distribution network, voltageand frequency are severely disturbed due to imbalance between generation and loaddemand [172]. During islanded operation, the DERs must be able to carry the loadon the islanded section and to guarantee a safe and stable microgrid operation withincertain voltage and frequency limits. When the available power generation capacity issmaller than load demand, load shedding is needed to restore the balance.
Although maximum values for active and reactive power loads are considered inthe network parameters shown in Table 3.3, variable load profiles have been generatedfor loads L1, L2, L6, L7 and L9. Figure 5.1 shows the load profiles.
0 4 8 12 16 20 240
0.05
0.1
0.15
0.2
0.25
0.3
Time (h)
P,Q
(p
u)
Load profile L1
*=L
1+L
2
Real Power
Reactive Power
0 4 8 12 16 20 240
0.005
0.01
0.015
0.02
0.025
Load profile L6
Time (h)
P,Q
(p
u)
0 4 8 12 16 20 240
0.005
0.01
0.015
Load profile L7
Time (h)
P,Q
(p
u)
0 4 8 12 16 20 240
0.005
0.01
0.015
0.02
0.025
Load profile L9
Time (h)
P,Q
(p
u)
Figure 5.1: Load profiles
The DG units, whose modeling details for control purposes were presented inChapter 3, have the following characteristics:
• DEG: A DE is used as the prime mover of a synchronous generator. In an islandedconfiguration, the system frequency is determined by the DE mechanical speed
95

ωm, while the synchronous generator field current sets the voltage magnitude. Themaximum output power of the DEG is 1.5625 MVA (0.3125 pu). The excitationvoltage of the synchronous generator is regulated for maintaining the terminalvoltage constant (voltage control mode). For this mode, the synchronous machineis considered as a voltage controlled bus in the power flow calculation.
• WTG: A horizontal-axis WT is chosen as the prime mover of an induction gen-erator. The WT model selected has a lumped mass, with pitch control throughthe variation of blade pitch angle, β. The maximum output power of the WTGis 1 MVA (0.2 pu).
• PV array : 330 SunPower modules (SPR-305) are used. In the particular caseof PV1, the array consists of 66 strings of 5 series-connected modules connectedin parallel
(66× 5× 305.2 W
module= 100.7 kW
), or 0.02 pu. PV2, PV3 and PV4
have 0.02, 4 × 10−3 and 5 × 10−3 pu of power generation capacity, respectively.The boost converter and VSC, of the PV array are represented by equivalentvoltage sources generating the ac voltage averaged over one cycle of the switchingfrequency.
• BSS: Bidirectional dc/ac converters and a lithium batteries with maximum out-put power of 100 kW (0.02 pu) for BSS1 and 75 kW (0.015 pu) for BSS2 are used.The charging power for every BSS is 50 kW (0.01 pu). Buck-boost converters areused to charge the batteries, when neede, and to deliver energy to the microgridwhen batteries go into discharge mode.
DERs do not provide system frequency regulation. Therefore, for power flowcalculations, the DERs (except for the DEG) are considered as load nodes operatingat their rated powers, assuming negative power consumption. During grid-connectedoperation, the main grid performs voltage and frequency control. During autonomousoperation, local microgrid generation controls voltage and frequency.
Since a centralized controller will be used, an AMI is required in the microgrid.Therefore, it is assumed that every load has a SM. The SM performs instantaneousvoltage, current and power measurements, energy measurements, and power qualitydata, and has communications capability. SM data includes the unique meter identifierand measured data values [173].
The system operator can remotely connect and disconnect sources to any cus-tomer in order to control the power flows in the microgrid, based on the informationcollected from the SMs. SMs collect data from the end consumers and transmit thisdata information through the local area network to a data collector, which transmitsit to the DMS. This process usually is executed every 15 minutes or as frequently asprogrammed by the DMS.
96

5.3 Controller design
The system states for the islanded section (left side feeder) of the distributionsystem of Figure 3.24 are defined as:
x =
[x1
x2
]x1 ∈ R10 x1 = [Vi]
T i = 1, 2, . . . , 10
x2 ∈ R10 x2 = [δi]T i = 1, 2, . . . , 10
(5.1)
where Vi and δi are node’s voltage and angle of bus i.Additionally, more variables and vectors are needed for the controller formulation,
such as: power at the nodes Si = Pi + jQi, admittance matrix Y, and power generatedby the DG units, PDGi
:
Y = [Yij] (5.2)
S =
[Pload
Qload
]Pload ∈ R10 Pload = [PLi
]T i = 1, 2, . . . , 10
Qload ∈ R10 Qload = [QLi]T i = 1, 2, . . . , 10
(5.3)
PDG = [PDGi]T i = 1, 2, . . . , 8
i = 1 Diesel engine power (PDE)i = 2 Wind turbine power (PWT )i = 3 Photovoltaic Power, Array 1 (PPV1)i = 4 Photovoltaic Power, Array 2 (PPV2)i = 5 Photovoltaic Power, Array 3 (PPV3)i = 6 Photovoltaic Power, Array 4 (PPV4)i = 7 Battery Storage System 1 (PBSS1)i = 8 Battery Storage System 2 (PBSS2)
Si = Vi
N∑m=1
(YimVi)∗ (5.4)
Eq. (5.4) is solved iteratively through the Newthon-Raphson (NR) power flowalgorithm [2], with prior knowledge of PDGi
, i = 2, 3, . . . , 8 and current load consump-tion of every power system node. PDE is estimated in a prediction horizon of lengthN . One important modification to the power flow equation Eq. (5.4), is the inclusionof the reactive power consumed by the WTG at Bus 7, which is calculated as follows[65]:
QWT = −V2
7
zp+−V 2
7 +√V 4
7 − 4P7z2
2z(5.5)
z = z1 + z2; zp =zczmzc − zm
97

where the negative sign of Eq. (5.5) represents reactive power consumption of theWTG induction generator from the network; zm, zc, z1 and z2 represent the excitationreactance, reactance of the capacitor banks installed at the terminal of the inductiongenerator and the stator and rotor reactance, respectively.
The objectives of this control strategy are:
• to manage the batteries energy;
• to disconnect low priority loads when the predicted load demand is greater thanthe generation capacity of the microgrid;
• to preserve microgrid stability and to keep the voltage magnitude with a maxi-mum variation of ±5%.
The centralized NMPC is implemented in the microgrid centralized controller(MGCC). A control vector u for managing loads connection and disconnection, as wellas batteries charging and discharging modes is defined in Eq. (5.6). Table 5.1 shows therelationship between each bit of the control vector and its corresponding load controllerfor switching purposes, i.e. for ui = 1 → Li load is connected, and for ui = 0 → Liload is disconnected.
u = [ui] i = 1, 2, . . . , 13 ui is a binary signal (5.6)
Table 5.1: Control vector correspondence with loads and BSS
Control signal Load Observationsu1 L∗1 = L1 ∪ L2 Variable loadsu2 L3 ∪ L4 Constant loadsu3 L5 Constant loadu4 L6 Variable loadu5 L7 Variable loadu6 L8 Constant loadu7 L9 Constant loadu8 L10 Constant loadu9 L11 Constant loadu10 BSS1 Charge modeu11 BSS1 Discharge modeu12 BSS2 Charge modeu13 BSS2 Discharge mode
An important requirement in the design of NMPC is the availability of a modelfor predicting the output variable. In our case, predicted values of the power generatedby the DEG (PDE) are needed to optimally decide whether a load shedding must beperformed or not. Once all loads to be shed are selected by the load shedding algorithm,trip commands are sent from the MGCC to the proper loads. Figure 5.2 shows thecontroller architecture for integrating the NMPC in the MGCC.
98

Figure 5.2: NMPC architecture for a centralized load shedding strategy
The NR power flow algorithm is used for predicting the microgrid’s system statesx ∈ R20, which are used to calculate PDE in a prediction horizon N . The controlvector u commands loads connection and disconnection, as well as batteries charge anddischarge processes within the NR algorithm. A initial data set Zk composed by thebatteries’ SOC, load demand and the active power generated by every DER is neededprevious the execution of the NR power flow algorithm. The data set Zk does notconsider load variations within the prediction horizon. This fact is considered, and twoapproaches were tested for the initial iterative load values of the NR algorithm in orderto predict the PDE:
1. Take the load measurements and consider them as constants during the predictionhorizon N ;
2. Use a load predictor based on artificial neural networks (ANN). Twenty loadprofiles from different days of the week for every variable load in the microgridwere used for training a three layer ANN. The load predictor receives as inputsthe load measurements and the hour of the day and provides the load predictionfor the upcoming 45 minutes, as shown in Figure 5.3. Therefore, up to N = 3could be used in the NMPC algorithm using this load predictor.
The encircled first dot shown in Figure 5.3 at 4:00 AM represents the load mea-surement and the remaining three dots the predictions made by the ANN pre-dictor every 15 minutes. Three more predictions can be observed in the figure
99

0 4 8 12 16 20 240
0.05
0.1
0.15
0.2
0.25
0.3
Load−1 typical profile (pu)
Figure 5.3: Load-1 prediction using ANN
at 13:00 PM and 22:00 PM. The dashed line in Fig. 5.3 represents the true loaddemand value.
Another approach for predicting the PDE was developed with an autoregressivemodel with external input (ARX) through a data-based modeling using an adaptiveneuro-fuzzy inference system (ANFIS). As in the case of the ANN training algorithm,20 different generation profiles of the DEG for different days of the week were used astraining set for the ANFIS. The ARX configuration developed is the one detailed in[174, 175] and shown in Figure 5.4. This modeling procedure does not imply an NRpower flow calculation which reduces the computing time of the control algorithm.
Since the voltage magnitude of the microgrid is to be kept within a ±5% rangeof variation, the static voltage stability index L, presented in [65] is used for defininga secure range of operation of the DEG. Considering the average generation values ofthe DERs: PWT = 0.15, PPV1,2,3,4 = 0.049 and PBSS1,2 = 0.035 in discharge mode andPBSS1,2 = −0.02 in charge mode; and that the voltage magnitude limits are 0.95 ≤|V | ≤ 1.05, an optimization procedure in which a sweep of the values of PL, QL, and|V | within allowable ranges was performed as follows:
minimize |1− L|subject to
PDE + PWT + PPV1,2,3 ± PBSS1,2 = PL + Ploss
Li+1 = 4(XeqPL−ReqQL)2+(XeqQL+ReqPL)V 2
i
V 4i
< 1
0 < PL < Pmax0 < QL < Qmin
0.95 ≤ |V | ≤ 1.05
(5.7)
100

Figure 5.4: PDE ANFIS model
where Xeq and Req are the equivalent reactance and resistance of the microgrid, respec-tively. The secure range of operation of PDE, estimated by the optimization processin (5.7) is:
PDE ≤ P+DE = 0.2 (5.8)
A list of steps for implementing the NMPC algorithm already described is shownin Algorithm 5.1.
The OCP is called feasible for an initial value Z0 whenever the set uN(Z0) overwhich the optimization is performed is nonempty.
The control vector u for the particular case of the proposed NMPC algorithm is re-stricted to be binary. Problems of this type are generally named mixed-integer nonlinearprogramming (MINLP) problems. The mixed-integer linear, quadratic and nonlinearprogramming package of TOMLAB for MATLAB was used for solving the OCP. ForMINLP, TOMLAB implements a branch-and-bound algorithm searching a tree whosenodes correspond to continuous nonlinearly constrained optimization problems. Thecontinuous problems are solved using sequential quadratic programming. The methodavoids the use of penalty functions. Global convergence is enforced through the useof a trust region and a filter that accepts a trial point whenever the objective or theconstraint violation is improved compared to all previous iterations [176].
5.4 Simulation results
A 24-hour simulation was performed for testing the proposed controller. Variableprofiles for wind velocity and solar radiation were used during the simulation, as shownin Figure 5.5. The microgrid starts operating in grid-connected mode and at 2:00 AM,an islanding operation is simulated in the left side feeder. The right side feeder is notconsidered in this case, since Sc is open.
101

Algorithm 5.1 NMPC algorithm for automated load shedding and BSS management
1: Define a DE power generation reference r < P+DE
2: Take system measurements: Zk =[
PDG(k)T Pload(k)T SOCT]T
3: Set Z0 = Zk and solve the following OCP:
minimize
JN (Z0,u(·)) =
Np−1∑k=0
(uPDE (k,Zk,xk,uk)− r)2
subject to
uPDE (k + 1,Zk,xk,uk) = f (uPDE (k,Zk,xk,uk) ,uk)8∑i=2
PDERi(k) + PDE(k) = PL(k) + Ploss
constrained to
• PDEmin= 0.05 < PDE < P+
DE = 0.2
• L1, L7 and L8 always have to be connected (high priority
loads);
• At least one of the following loads has to be connected: L3,
L5 or L11 (low priority loads);
• At least one of the following loads has to be connected: L6,
L9 or L10 (low priority loads);
• ∀t : PDE < r ∩ SOC < 100% → batteries go into charging mode;
• ∀t : PDE > r ∩ SOC > 10% → batteries go into discharge mode
(batteries deliver energy to the grid);
• The minimum load to be shed is 10% of the actual connected load.
4: Define the control law µ (Zk) = u∗(1)
102

0 5 10 15 2010.5
11
11.5
12
12.5
13
13.5
14
14.5
15
15.5
Time (h)
m/s
Wind velocity
0 5 10 15 200
100
200
300
400
500
600
700
800
900
1000
Time (h)W
/m2
Solar radiation
Figure 5.5: Profiles of wind velocity and solar radiation used in the simulation
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 240
0.1
0.2
0.3
0.4
0.5
Time (h)
pu
DEG generated power
Open loop
NMPC w/o Load Prediction
NMPC + ANN Load Predictor
NMPC + ANFIS model
0 4 8 12 16 20 24−0.01
−0.005
0
0.005
0.01
0.015
0.02
Time (h)
pu
BSS−1 power
0 4 8 12 16 20 24−0.01
0
0.01
0.02
0.03
Time (h)
pu
BSS−2 power
Figure 5.6: Performance comparison of the NMPC with different model approaches (batter-ies in the charge-discharge mode)
103

0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
DEG generated power
Time (h)
pu
Open loop
NMPC+ANFIS
0 4 8 12 16 20 24
0.94
0.96
0.98
1
1.02
Voltage magnitude
Time (h)
pu
Open loop
NMPC+ANFIS
0 4 8 12 16 20 240.97
0.98
0.99
1
1.01
Frequency
Time (h)
pu
Open loop
NMPC+ANFIS
Figure 5.7: PDE output signal when the load shedding NMPC strategy is used (batteries inthe switching mode), islanding event at 02h00
The MGCC is monitoring the microgrid all the time for alerting an islanding event.Islanding detection is out of the scope of this paper; reference [177] describes island-ing detection techniques. Once the islanding condition is confirmed by an islandingdetection algorithm, the NMPC starts processing data every 15 minutes, except whenPDE > 1.1 × r, which means that the DE operates near its generation limits. In thiscase, the algorithm evaluates all the variables in order to calculate the amount of loadto shed until the next scheduled calculation loop.
Figure 5.6 shows a performance comparison of the NMPC algorithm when thethree different techniques for predicting the PDE output, detailed in Section III.B, areused for an optimization horizon N = 2. The approach were the loads measurementsare kept fixed for the power flow calculation in the prediction horizon offers the worstresults, since the PDE overpasses the safe limit of generation. On the other hand, theuse of the load predictor using ANNs in the power flow calculation show much betterresults and the generation profile of the DEG never violates the 0.2 pu generation limit.
104

0 4 8 12 16 20 24
0.12
0.14
0.16
0.18
0.2WTG power
pu
0 4 8 12 16 20 240
0.01
0.02PV1 power
0 4 8 12 16 20 24−0.01
0
0.01
0.02
BSS−1 power
0 4 8 12 16 20 24−0.01
0
0.01
0.02
BSS−2 power
0 4 8 12 16 20 240
0.1
0.2
0.3
Load−1 profile
pu
0 4 8 12 16 20 24
0
10
20x 10
−3 Load−3 profile
0 4 8 12 16 20 24
0
0.01
0.02
0.03
Load−5 profile
0 4 8 12 16 20 24
0
0.01
0.02
Load−6 profile
pu
0 4 8 12 16 20 24
0
5
10
x 10−3 Load−7 profile
0 4 8 12 16 20 24
0
10
20x 10
−3 Load−8 profile
0 4 8 12 16 20 24
0
0.01
0.02
Load−9 profile
Time (h)
pu
0 4 8 12 16 20 24
0
0.01
0.02
0.03
Load−10 profile
Time (h)
pu
0 4 8 12 16 20 24
0
0.02
0.04
Load−11 profile
Time (h)
pu
Figure 5.8: Profiles of RES generated power and load power consumption
Finally, the ARX-ANFIS model offers the best result, since the generation profile iskept much closer to the reference r = 0.18, which is the same for all the cases. Forthese tests, no battery management strategy has been implemented. Batteries are in acharge-discharge mode, and are assumed to be available when needed, Figure 5.6.
Figures 5.7 and 5.8 provide additional information on the NMPC algorithm per-formance. These figures show microgrid voltage and frequency and loads and batteriesswitching due to the NMPC calculation. The benefit of using this technique is re-markable, since voltage magnitude keeps within the ±5% band when the microgrid isislanded, which is not the case when no control action is performed. Additionally, theconstraints included in the NMPC algorithm are not violated. High priority loads L∗1,L7 and L8 were not disconnected, and at least one load of every low priority load groupskept connected, as it was programmed in the NMPC algorithm. Furthermore, batteriescharge at the off-peak times, when there is availability of power from the generationunits. Batteries go into discharge mode (delivering power to the grid) when there isa power deficit due to peak consumption (Figure 5.8). The inclusion of load sheddingand battery management in the NMPC algorithm (Figures 5.7 and 5.8) improves its
105

performance with respect to the one showed in Figure 5.6 where an open-loop batteriesstrategy was tested.
5.5 Integration of the MGCC with the DCs
The microgrid parameters that are constantly monitored by the proposed con-trollers in this research, are the power generated by the DEG and its voltage andfrequency magnitudes. In Section 4.2 was designed an FDD module to detect DE ac-tuator faults and to estimate a post-failure model to reconfigure an MPC in order tomake it fault-tolerant. Now, the NMPC algorithm manipulates its DEG maximumpower generation constraint when any degradation in the performance of the DE ac-tuator is present, whose detection information is provided by the FDD module of theDEG.
The fault-free model of the DE is:
ωk − 1.669ωk−1 + 0.699ωk−2 = 0.003uk−1 + 0.002uk−2 (5.9)
where ω represent the DE speed in(rads
)and u the amount of fuel injected into the
DE.The post-failure model of the DE, estimated by the FDD module when an actuator
fault is simulated at 10h00 AM (see Figure 5.9) is:
ωk − 1.565ωk−1 + 0.602ωk−2 = 0.45uk−1 − 0.15uk−2 (5.10)
Figure 5.9 shows times responses of the microgrid parameters when the DEG isbeing controlled by the MPC and the FTMPC. The entire microgrid is being monitoredand managed by the MGCC. It is remarkable that the microgrid voltage magnitude(Figure 5.9 (a)) becomes unstable when the DEG is being controlled by the MPC andan actuator fault is present, which is not the case when the FTMPC is controllingthe DEG, since it is capable of accommodating the fault and to send the constraintadjustment to the NMPC algorithm (Figure 5.9 (b)). The estimation of the new P+
DE
is done by calculating the performance degradation in the DE actuator, as follows:
P+DE = lim
z→1
[(1− z−1
) 0.45z−1 − 0.15z−2
1− 1.565z−1 + 0.602z−2
1− 1.669z−1 + 0.699z−2
0.003z−1 + 0.002z−2
]× 0.2
P+DE = 0.1696
P+DE is updated in the NMPC algorithm 5.1.
This centralized control strategy with two-way communication is able to effec-tively manage actuator faults (performance degradation) of the DE, whenever the per-formance degradation is small enough for being tolerated. In the case of this simulation,the performance degradation represented a 20% reduction of the actuator effectiveness.
106

0 4 8 12 16 20 240.9
0.95
1
1.05
1.1
Time (h)(a)
pu
Voltage magnitude of the microgrid
V − FTMPC
V − MPC
0 4 8 12 16 20 240
0.05
0.1
0.15
0.2
0.25
0.3
Time (h)(b)
pu
DEG generated power
PDEG − FTMPC
PDEG − MPC
PDEG max constraint
0 4 8 12 16 20 24
−1.5
−1
−0.5
0
0.5
1
Time (h)(c)
DE
AR
X m
od
el
yk − a
1y
k−1 − a
2y
k−2 = b
1u
k−1 + b
2u
k−2
a
1
a2
b1
b2
0 4 8 12 16 20 24
0
0.5
1
1.5
2
Time (h)(d)
Residual response of the FDD module
Residual
Alarm indicator
Figure 5.9: Simulation results of the two way communication between de centralized con-troller and the distributed controllers. (a) Voltage magnitude response comparison for FTMPCand MPC regulating the DEG; (b) Power generation response comparison for FTMPC andMPC; (c) Post-failure model estimation using the FDD module; and (d) Residual response(fault is present at 10h00 AM)
5.6 Conclusions
An optimal predictive control strategy for energy management of the batteriesand load shedding purposes has been designed and tested in an isolated microgridwith DERs. This algorithm is implemented in the MGCC. Significant performanceimprovement is achieved with the use of this controller over simulations performedwithout it, since it allows to avoid power unbalances through an optimal load sheddingstrategy and to keep the voltage magnitude within safe limits, thus increasing themicrogrid security.
Good energy management in an isolated microgrid should first ensure continuoussupply to critical loads. Thereafter, other targets could be set, such as maximizing
107

efficiency, reducing operating costs and so on.The comparison between the use of this algorithm and an open-loop system con-
dition shows the benefits of the technique: the voltage magnitude remains stable andclose to its normal operating value (1 pu), an load is served, except for the disconnec-tion of some low priority loads when necessary. In the discharge mode the batteriessend active power to the grid, while in the charge mode the batteries consume activepower to charge. In the islanded mode, the DEG must supply all the power demandthat is not supplied by other DG units. Due to the rated power limitations of the DEG,significant load shedding is necessary for high load condition in this particular system.
The information provided by the FDD module allows manipulating the generationlimit of the power generated by the DEG in the NMPC algorithm, which is helpful foraccommodating degradation performance in the DE actuator. This two-way commu-nication between the centralized control strategy and the distributed controllers makesevident the advantage of the architecture designed for the islanded microgrid operation.
108

Chapter 6
Conclusions and future work
This chapter presents a summary of the main results and a comparison of thedifferent control schemes proposed in this thesis. Based on these discussions, someconclusions are derived. The conclusions are divided into main contributions and limi-tations. Finally, possible future directions for this research are proposed.
6.1 Discussion
6.1.1 Modeling of the microgrid components and integrationinto a benchmark model
Chapter 3 was devoted entirely to the components of the microgrid. For thispurpose a hybrid power system composed of a DEG, a WTG, PV arrays and BSS wasselected. The dynamic equations of the microgrid components allowed the integrationof all the components in one simulation platform for testing the control algorithmsproposed in Chapters 4 and 5.
It was emphasized the use of dynamic models that allow state-space representa-tions, since the controllers used throughout this research were model-based. On theother hand, the generation of a microgrid benchmark model by using the architectureproposed by CIGRE TF V6 in [145] with the above-mentioned models allowed theimplementation of a realistic simulation environment implemented in Simulink. TheSympower Systems library was used for the development of the simulation scenario.
6.1.2 Model-based controllers for guaranteeing optimal inte-gration of a DEG as a master generation unit in a mi-crogrid
A methodology for designing fault-tolerant controllers for guaranteeing a correctregulation of the voltage and frequency of a master generation unit within an islandedmicrogrid is described in Chapter 4. The FTC schemes for this purpose are mainlytwo:
109

• FTMPC. It is conformed by the combination of an MPC controller and an FDDmodule that reconfigures the controller when a fault occurs in the DE actuator.
• MRAC. This scheme has been combined with two different controllers in its feed-forward loop: PID and LPV. The main advantage of this approach lies in the factthat any deviation of the optimal system response (model reference) is managedby the adaptation law, whether it is a fault or any system perturbation.
Performance comparison between the proposed schemes and classic controllerswithout fault-tolerance show evident advantages related with the capacity of the mi-crogrid to operate under the presence of actuator faults in the DE, as well as normaloperating events, such as load connections and disconnections.
6.1.3 An MGCC scheme using NMPC
A predictive control scheme that prevents from unbalances between the load de-mand and the capacity of generation installed in an islanded microgrid is analyzed inChapter 5. Load demand variability demands the implementation of some predictorfor anticipating its behavior in order to get the future generated power from the mastergeneration unit within the next sampling intervals (15 minutes every interval). AnANN load predictor was implemented and tested with good results, as well as a ARX-ANFIS model that gives an accurate prediction of the future generated power of theDE when the actual demand load an RES power are known.
The prediction models were integrated in the NMPC, which calculates optimalload shedding when necessary, for avoiding risk of imbalance between demand and gen-eration, within an optimization framework. Therefore, an OCP is established, whereall the operating conditions of the microgrid are integrated, i.e. load priorities fordisconnection and batteries charging and discharging cycles. A comparison of somesimulation results of the microgrid working with and without the MGCC shows im-provements in the reliability of the microgrid when it operates in islanded mode, sincesimulation results showed the capability of the control strategy of maintaining withinsafe limits voltage and frequency of the microgrid (see Figure 6.1), as well as a correctbalance of generated power and load demand.
The information provided by the FDD module designed for monitoring the DEactuator performance was used for online constraint management in the NMPC al-gorithm. In Section 5.5 was presented a post-failure constraint value for the powergenerated by the DEG that was modified online in the NMPC algorithm in order to ac-commodate the DE actuator performance. The simulation showed good results, whichmakes evident the benefits of the two-way communication between the centralized con-trol strategy and the distributed controllers.
110

0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 230
0.1
0.2
0.3
DEG generated power (pu)
Time (h)
Open loop
NMPC+ANFIS
0 4 8 12 16 20
0.94
0.96
0.98
1
1.02
Voltage amplitude (pu)
Time (h)
Open loop
NMPC+ANFIS
0 4 8 12 16 200.97
0.98
0.99
1
1.01
Frequency (pu)
Time (h)
Open loop
NMPC+ANFIS
Figure 6.1: PDE output signal when the load shedding NMPC strategy is used (batteries inthe switching mode), islanding event at 12h00
6.2 Conclusions
6.2.1 Main contributions of the thesis
The main contribution of this research work is the adaptation of the non-linearmodel predictive control (NMPC) algorithm into the microgrid centralized controller(MGCC), whose main functionality is to predict and prevent future events of powerimbalance between the generated power and the demand load due to a limited genera-tion capacity and/or a rise in the demand, which would cause a collapse of the network.The main features of the MGCC implemented with the NMPC algorithm are:
• Reliable power generation prediction in an interval up to three samples (with a15 minutes samplig interval, a 45 minutes prediction is obtained);
111

• The optimizer implemented for solving the OCP guarantees a feasible solution allthe time (always convergent);
• The network operating conditions, related with the priority of every load foreventual disconnections can ben modified any time between two sampling intervalsduring the operation of the microgrid;
• It is relatively easy to scale the network size, for including more nodes in thealgorithm, through the modification of the sizes of the matrices of the OCP;
• Among the configuration parameters of the microgrid that can be set in theNMPC algorithm, the generation limit of the power generated by the DEG isone of them, which could be used to minimize the power coming from this non-renewable source and reduce CO2;
• It is possible to include information from multiple source to improve the NMPCperformance and make it a robust system, as it was tested with the informationfrom the FDD module of the DEG for managing constraints in the algorithmwhen faults in the DE actuator were present.
Significant performance improvement is achieved with the use of this controller,since it keeps the generation power from the DG units within its generation limits,avoiding risks in the system of becoming unstable.
In addition to the above-mentioned control scheme, another contribution of thisthesis is the methodology proposed for the integration of a DEG as a master generationunit (regulates voltage and frequency in the microgrid) in a fault-tolerant framework,thanks to the use of two different controllers: MPC combined with an FDD moduleand an MRAC combined with two different controllers, PID and LPV. The results thatare analyzed in Chapter 4 show the advantages of the use of these controllers. Com-pared with a baseline controller, the developed controllers, FTMPC, MRAC-PID andMRAC-LPV achieved a significantly better performance in both voltage and frequencyresponses, while guaranteeing energy supply from the DEG for the load. The controllerreconfiguration used in the FTMPC leads to a simple approach that does not involveany switching operation, as in the case of gain scheduling techniques, which could leadto instability problems. Since MPC recalculates its output at every sampling time,the reconfiguration operation would be another loop calculation per se. On the otherhand, MRAC has an inherent capability to accommodate perturbations, faults andmodel uncertainties.
Additionally, a simulation platform for testing the above-mentioned control ap-proaches was developed. This platform is a rural distribution network with distributedgeneration, where every individual component was studied, tested and integrated intoit, in order to make as realistic as possible simulation platform.
112

6.2.2 Limitations
Among the main limitations of the proposed control schemes are the precision ofthe models used in its structure, since its operation philosophy relies on the response(open-loop and closed-loop) of the models under different control inputs. It is thereforedifficult to completely guarantee an exact reproducibility of the results shown in thisresearch once they are installed in the real world, since the models used here were notvalidated in a laboratory.
On the other hand, another limitation of these control algorithms compared withclassic control techniques, lies in its processing time, which is much bigger. Therefore,before installing one of these algorithms in practice, a careful study of the processing ca-pacity is highly needed, mainly because of the amount of data that has to be processed,i.e. from the models and matrices manipulation for optimization calculation.
6.3 Future work
It is well known that the smart grids research field is a hotspot and many re-search activities could be done from the results of this research. The following researchactivities are proposed:
6.3.1 Exploit the microgrid benchmark model as a virtualtestbed
Since a detailed simulation platform has been generated in Chapter 3, it couldbe used for testing more non-classic control algorithms, such as intelligent control ap-proaches for proposing a centralized or decentralized management system for load shed-ding with similar purposes as the one proposed in this research. Approaches relatedwith fuzzy controllers and neural network controllers could lead to good results regard-ing processing times for overtaking the limitation of the model-based controllers.
The microgrid benchmark model could also be used for testing active filters andanti-islanding algorithms, topics that were out of the scope of this research.
6.3.2 Develop centralized control concepts for controlling sys-tems with complex architectures
In view of the inherent capacity of the proposed MGCC for managing distributedcontrollers; it is an open research area in the fault-tolerant control field to generate moreefficient architectures for dealing with faults in complex systems and in real time. Acentralized and hierarchical architecture supposes a correct operation of the distributedcontrollers, whose reconfiguration (possibly a set point recalculation) when any faultevent occurs is a responsibility of the centralized controller and in this particular casethe NMPC algorithm.
113

6.3.3 Develop fault detection techniques in the components ofthe microgrid
Fault detection and diagnosis in every component of the microgrid would improveconsiderably the MGCC performance under faulty scenarios, since faults diagnosis in-formation could be used for representing changes in the network configuration in theNMPC algorithm through constraints management as it was illustrated in Section 5.5.
114

Bibliography
[1] B. Bell, “The great american blackout.,” Transmission and Distribution World,vol. 57, no. 6, p. 88, 2005.
[2] J. Glover, M. Sarma, and T. Overbye, Power System Analysis and Design. Cen-gage Learning, 2011.
[3] J. Maciejowski, Predictive Control with Constraints. Prentice-Hall, 2002.
[4] K. Astrom and B. Wittenmark, Adaptive Control. Addison-Wesley PublishingCompany, 2nd ed., 1995.
[5] Y. Zhang and J. Jiang, “Bibliographical review on reconfigurable fault-tolerantcontrol systems,” Annual Reviews in Control, vol. 32, no. 2, pp. 229 – 252, 2008.
[6] S. H. Lee, J. S. Yim, J. H. Lee, and S. K. Sul, “Design of speed control loopof a variable speed diesel engine generator by electric governor,” in IAS - IEEEIndustry Applications Society Annual Meeting, pp. 1–5, Oct. 2008.
[7] G. Constable and B. Somerville, A Century of Innovation - Twenty EngineeringAchievements that Transformed our Lives. USA: Joseph Henry Press, 2003.
[8] E. Colby and M. England, “How will a smart grid manage consumer energyappliances?,” in International Conference on Consumer Electronics, pp. 513–514,Jan. 2011.
[9] C. Cecati, G. Mokryani, A. Piccolo, and P. Siano, “An overview on the smartgrid concept,” in IECON 2010 - 36th Annual Conference on IEEE IndustrialElectronics Society, pp. 3322–3327, Nov. 2010.
[10] A. Kwasinski, “Towards a x201c;power-net x201d;: Impact of smart grids de-velopment for ICT networks during critical events,” in 2010 3rd InternationalSymposium on Applied Sciences in Biomedical and Communication Technologies(ISABEL), pp. 1–8, Nov. 2010.
[11] F. Li, W. Qiao, H. Sun, H. Wan, J. Wang, Y. Xia, Z. Xu, and P. Zhang, “Smarttransmission grid: Vision and framework,” Smart Grid, IEEE Transactions on,vol. 1, pp. 168–177, Sep. 2010.
115

[12] R. Kempener, P. Komor, and A. Hoke, Smart Grids and Renewables: A Guidefor Effective Deployment. International Renewable Energy Agency, 2013.
[13] “Summertime ... and electricity is in short supply,” The Christian Science Mon-itor, p. 4, July 2000.
[14] A. Yang and Y. Cui, “Global coal risk assessment: Data analysis and marketresearch,” World Resources Institute, vol., pp. 2–9, Nov. 2012.
[15] H. J. Schellnhuber, W. Hare, O. Serdeczny, S. Adams, D. Coumou, K. Frieler,M. Martin, I. M. Otto, M. Perrette, A. Robinson, M. Rocha, M. Schaeffer,J. Schewe, X. Wang, and L. Warszawski, “Turn down the heat: Why a 4 Cwarmer world must be avoided,” International Bank for Reconstruction and De-velopment, vol., pp. 5–6, Nov. 2012.
[16] E. F. Fuchs and M. A. Masoum, Power Conversion of Renewable Energy Systems,ch. 12, pp. 557–687. Boulder, CO, USA: Springer, 2011.
[17] P. Elstrom, “All the same in the dark? not in NYC,” Business Week Online,2003.
[18] Reuters, “Hurricane Sandy aftermath: Anger grows at recovery efforts, especiallyoutside manhattan,” Nov 2012.
[19] E. Kamal, M. Koutb, A. A. Sobaih, and B. Abozalam, “An intelligent maximumpower extraction algorithm for hybrid wind-diesel-storage system,” InternationalJournal of Electrical Power & Energy Systems, vol. 32, no. 3, pp. 170–177, 2010.
[20] X. Mamo, S. Mallet, T. Coste, and S. Grenard, “Distribution automation: Thecornerstone for smart grid development strategy,” in Power Energy Society Gen-eral Meeting, 2009. PES ’09. IEEE, pp. 1 –6, Jul. 2009.
[21] B. Ha, S. Lee, C. Shin, S. Kwon, S. Park, and M. Park, “Development of intelli-gent distribution automation system,” in Transmission Distribution ConferenceExposition: Asia and Pacific, 2009, pp. 1 –4, oct. 2009.
[22] T. Jin and J. Jimenez, “Review on planning and automation technologies for dis-tributed generation systems,” in Automation Science and Engineering (CASE),2010 IEEE Conference on, pp. 269 –274, Aug. 2010.
[23] D. Popovic and E. Boskov, “Advanced fault management as a part of smart gridsolution,” in SmartGrids for Distribution, 2008. IET-CIRED. CIRED Seminar,pp. 1–4, Jun. 2008.
[24] D. Haughton and G. Heydt, “Smart distribution system design: Automatic recon-figuration for improved reliability,” in Power and Energy Society General Meeting,2010 IEEE, pp. 1 –8, Jul. 2010.
116

[25] J. Guerrero, P. C. Loh, T.-L. Lee, and M. Chandorkar, “Advanced controlarchitectures for intelligent microgrids -part i: Power quality, energy storage,and ac/dc microgrids,” IEEE Transactions on Industrial Electronics, vol. 60,pp. 1254–1262, April 2013.
[26] R. Zamora and A. K. Srivastava, “Controls for microgrids with storage: Re-view, challenges, and research needs,” Renewable and Sustainable Energy Re-views, vol. 14, no. 7, pp. 2009 – 2018, 2010.
[27] S. Samantaray, G. Joos, and I. Kamwa, “Differential energy based microgridprotection against fault conditions,” in Innovative Smart Grid Technologies, pp. 1–7, Jan. 2012.
[28] C. Wang, M. Liu, and L. Guo, “Cooperative operation and optimal design forislanded microgrid,” in Innovative Smart Grid Technologies, pp. 1–8, Jan. 2012.
[29] C. Li, Y. Tan, and Y. Cao, “Energy management system architecture for newenergy power supply system of islands,” in Innovative Smart Grid Technologies,pp. 1–8, Jan. 2012.
[30] J. Certuche Alzate and M. Velez-Reyes, “A reconfiguration algorithm for a dczonal electric distribution system based on graph theory methods,” in ElectricShip Technologies Symposium, 2009. ESTS 2009. IEEE, pp. 235–241, Apr. 2009.
[31] A. Kahrobaeian and Y. A. Mohamed, “Smart control interface for robust oper-ation of DG units in grid connected and islanded modes,” in Innovative SmartGrid Technologies (ISGT), 2012 IEEE PES, pp. 1 –7, Jan. 2012.
[32] E. T. Jauch, “Smart grid volt/var management: Challengues of integrating dis-tribution DG,” in Innovative Smart Grid Technologies (ISGT), 2012 IEEE PES,Jan. 2012.
[33] M. Thompson, T. Martini, and N. Seeley, “Wind farm volt/var control usinga real-time automation controller,” Schweitzer Engineering Laboratories, Inc.,2011.
[34] W. El-Khattam, K. Bhattacharya, Y. Hegazy, and M. Salama, “Optimal invest-ment planning for distributed generation in a competitive electricity market,”IEEE Transactions on Power Systems, vol. 19, pp. 1674 – 1684, Aug. 2004.
[35] T. Lambert, P. Gilman, and P. Lilienthal, Micropower System Modeling withHomer, pp. 379–418. John Wiley & Sons, Inc., 2006.
[36] M. AlHajri and M. El-Hawary, “Optimal distribution generation sizing via fastsequential quadratic programming,” in 2007 Large Engineering Systems Confer-ence on Power Engineering, pp. 63 –66, oct. 2007.
117

[37] D. Craig and C. Befus, “Implementation of a distributed control system for elec-tric distribution circuit reconfiguration,” in Transmission and Distribution Con-ference and Exhibition, 2005/2006 IEEE PES, pp. 342–347, May 2006.
[38] B. Kroposki, R. Lasseter, T. Ise, S. Morozumi, S. Papatlianassiou, and N. Hatziar-gyriou, “Making microgrids work,” Power and Energy Magazine, IEEE, vol. 6,no. 3, pp. 40–53, 2008.
[39] J. Pecas Lopes, C. Moreira, and A. Madureira, “Defining control strategies foranalysing microgrids islanded operation,” in Power Tech, 2005 IEEE Russia,pp. 1–7, Jun. 2005.
[40] Q. Shafiee, J. Guerrero, and J. Vasquez, “Distributed secondary control for is-landed microgrids - a novel approach,” IEEE Transactions on Power Electronics,vol. 29, pp. 1018–1031, Feb 2014.
[41] S. Anand, B. G. Fernandes, and M. Guerrero, “Distributed control to ensureproportional load sharing and improve voltage regulation in low-voltage DC mi-crogrids,” IEEE Transactions on Power Electronics, vol. 28, pp. 1900–1913, April2013.
[42] S. Conti, R. Nicolosi, S. A. Rizzo, and H. Zeineldin, “Optimal dispatching ofdistributed generators and storage systems for MV islanded microgrids,” IEEETransactions on Power Delivery, vol. 27, no. 3, pp. 1243–1251, 2012.
[43] M. Andreasson, D. Dimarogonas, K. Johansson, and H. Sandberg, “Distributedvs. centralized power systems frequency control,” in 2013 European Control Con-ference (ECC), pp. 3524–3529, July 2013.
[44] Y. Levron, J. Guerrero, and Y. Beck, “Optimal power flow in microgrids withenergy storage,” IEEE Transactions on Power Systems, vol. 28, pp. 3226–3234,Aug 2013.
[45] D. Michaelson, H. Mahmood, and J. Jiang, “A predictive energy managementstrategy with pre-emptive load shedding for an islanded pv-battery microgrid,”in IECON 2013 - 39th Annual Conference of the IEEE Industrial ElectronicsSociety, pp. 1501–1506, Nov 2013.
[46] H. Seyedi and M. Sanaye-Pasand, “New centralised adaptive load-shedding algo-rithms to mitigate power system blackouts,” Generation, Transmission Distribu-tion, IET, vol. 3, pp. 99–114, January 2009.
[47] A. Hooshmand, H. Malki, and J. Mohammadpour, “Power flow management ofmicrogrid networks using model predictive control,” Computers & Mathematicswith Applications, vol. 64, no. 5, pp. 869 – 876, 2012. Advanced Technologies inComputer, Consumer and Control.
118

[48] H. Kanchev, V. Lazarov, and B. Francois, “Environmental and economical opti-mization of microgrid long term operational planning including pv-based activegenerators,” in 2012 15th International Power Electronics and Motion ControlConference (EPE/PEMC), pp. LS4b–2.1–1–LS4b–2.1–8, Sept 2012.
[49] A. Chaouachi, R. Kamel, R. Andoulsi, and K. Nagasaka, “Multiobjective in-telligent energy management for a microgrid,” IEEE Transactions on IndustrialElectronics, vol. 60, pp. 1688–1699, April 2013.
[50] W. Qi, J. Liu, and P. D. Christofides, “A distributed control framework for smartgrid development: Energy/water system optimal operation and electric grid in-tegration,” Journal of Process Control, vol. 21, no. 10, pp. 1504 – 1516, 2011.Special Issue:Selected Papers From Two Joint IFAC Conferences: 9th Inter-national Symposium on Dynamics and Control of Process Systems and the 11thInternational Symposium on Computer Applications in Biotechnology, Leuven,Belgium, July 5-9, 2010.
[51] W. Qi, J. Liu, X. Chen, and P. Christofides, “Supervisory predictive control ofstandalone wind/solar energy generation systems,” IEEE Transactions on Con-trol Systems Technology, vol. 19, pp. 199–207, Jan 2011.
[52] L. Valverde, C. Bordons, and F. Rosa, “Power management using model pre-dictive control in a hydrogen-based microgrid,” in IECON 2012 - 38th AnnualConference on IEEE Industrial Electronics Society, pp. 5669–5676, Oct 2012.
[53] D. Olivares, C. Canizares, and M. Kazerani, “A centralized energy manage-ment system for isolated microgrids,” Smart Grid, IEEE Transactions on, vol. 5,pp. 1864–1875, July 2014.
[54] L. I. Minchala-Avila, L. E. Garza-Castanon, and E. R. Calle-Ortiz, “An intelligentcontrol approach for designing a low voltage DC breaker,” in Proceedings of 2012Andean Region International Conference, no. 4, pp. 163 –166, Nov. 2012.
[55] L. I. Minchala-Avila, A. Vargas-Martınez, L. E. Garza-Castanon, E. R. Calle-Ortiz, and J. C. Viola, “Model-based control approaches for optimal integrationof a hybrid wind-diesel power system in a microgrid,” in Proceedings of the 2ndInternational Conference on Smart Grids and Green IT Systems, pp. 12–21, May2013.
[56] L. Minchala-Avila, A. Vargas-Martinez, Y. Zhang, and L. Garza-Castanon, “Amodel predictive control approach for integrating a master generation unit in amicrogrid,” in 2013 Conference on Control and Fault-Tolerant Systems (SysTol),pp. 674–679, Oct 2013.
[57] A. Vargas-Martınez, L. I. Minchala-Avila, Y. Zhang, L. E. Garza-Castanon, andE. R. Calle-Ortiz, “Model-based fault-tolerant control to guarantee the perfor-mance of a hybrid wind-diesel power system in a microgrid configuration,” Pro-
119

cedia Computer Science, vol. 19, no. 0, pp. 712 – 719, 2013. The 4th Interna-tional Conference on Ambient Systems, Networks and Technologies (ANT 2013),the 3rd International Conference on Sustainable Energy Information Technology(SEIT-2013).
[58] A. Vargas-Martınez, L. I. Minchala-Avila, Y. Zhang, L. E. Garza-Castanon, andH. Badihi, “Hybrid adaptive fault-tolerant control algorithms for voltage andfrequency regulation of an islanded microgrid,” International Transactions onElectrical Energy Systems, pp. 1–18, 2014.
[59] L. I. Minchala-Avila, A. Vargas-Martınez, L. E. Garza-Castanon, R. Morales-Menendez, Y. Zhang, and E. R. Calle-Ortiz, “Fault-tolerant control of a mastergeneration unit in an islanded microgrid,” in Proceedings of the IFAC 2014 WorldConference, pp. 5327–5332, Aug. 2014.
[60] L. I. Minchala-Avila, L. E. Garza-Castanon, H. J. Altuve-Ferrer, Y. Zhang, andE. R. Calle-Ortiz, “Optimal energy management for stable operation of an is-landed microgrid,” submitted to IEEE Journal on Industrial Informatics, pp. 1–20, 2014.
[61] M. B. Reed, “Node equations,” Proceedings of the IRE, vol. 32, no. 6, pp. 355–359,1944.
[62] M. Reed, “Generalized mesh and node systems of equations,” IRE Transactionson Circuit Theory, vol. 2, no. 2, pp. 162–169, 1955.
[63] S. Li, J. Proano, and D. Zhang, “Microgrid power flow study in grid-connectedand islanding modes under different converter control strategies,” in Power andEnergy Society General Meeting, 2012 IEEE, pp. 1–8, 2012.
[64] H. Yang, F. Wen, and L. Wang, “Newton-raphson on power flow algorithm andbroyden method in the distribution system,” in Power and Energy Conference,2008. PECon 2008. IEEE 2nd International, pp. 1613–1618, 2008.
[65] H. Chen, J. Chen, D. Shi, and X. Duan, “Power flow study and voltage sta-bility analysis for distribution systems with distributed generation,” in PowerEngineering Society General Meeting, 2006. IEEE, pp. 8 pp.–, 2006.
[66] W. H. Kersting, Distribution System Modeling and Analysis. France: CRC Press,2007.
[67] T. Gonen, Electric Power Distribution System Engineering. USA: CRC Press,2007.
[68] “Strategic deployment document for european’s electricity networks of the fu-ture,” in European Technology Platform Smart Grids, Draft for 3rd General As-sembly, Belgium, oct. 2008.
120

[69] C. W. Gellings, The smart grid : enabling energy efficiency and demand response.Lilburn, GA : Fairmont Press : Taylor - Francis distribution, c2009., 2009.
[70] J. Arai, K. Iba, T. Funabashi, Y. Nakanishi, K. Koyanagi, and R. Yokoyama,“Power electronics and its applications to renewable energy in japan,” Circuitsand Systems Magazine, IEEE, vol. 8, pp. 52–66, quarter 2008.
[71] B. Hamilton and M. Summy, “Benefits of the smart grid [in my view],” Powerand Energy Magazine, IEEE, vol. 9, pp. 104 –102, Jan. 2011.
[72] B. Roberts and C. Sandberg, “The role of energy storage in development of smartgrids,” Proceedings of the IEEE, vol. 99, pp. 1139–1144, Jun. 2011.
[73] A. Goett and R. D. Farmer, Prospects for distributed electricity generation [elec-tronic resource]. A CBO paper, [Washington, D.C.] : Congress of the U.S.,Congressional Budget Office, [2003], 2003.
[74] M. Masoum, H. Dehbonei, and E. Fuchs, “Theoretical and experimental analysesof photovoltaic systems with voltage and current-based maximum power-pointtracking,” IEEE Transactions on Energy Conversion, vol. 17, pp. 514 – 522, dec2002.
[75] D. Paire and A. Miraoui, “Power management strategies for microgrid-A shortreview,” in 2013 IEEE Industry Applications Society Annual Meeting, pp. 1–9,IEEE, Oct. 2013.
[76] C. Schwaegerl, L. Tao, J. P. Lopes, A. Madureira, P. Mancarella, A. Anastasiadis,N. Hatziargyriou, and A. Krkoleva, “Report on the technical, social, economic,and environmental benefits provided by microgrids on power system operation,”Dec. 2009.
[77] J. Peas Lopes, C. Moreira, and A. Madureira, “Defining control strategies formicrogrids islanded operation,” Power Systems, IEEE Transactions on, vol. 21,pp. 916–924, May 2006.
[78] J. Dang and R. Harley, “Air conditioner optimal scheduling using best responsetechniques,” in 2012 IEEE Power Engineering Society Conference and Expositionin Africa (PowerAfrica), pp. 1–5, July 2012.
[79] X. Chen, T. Wei, and S. Hu, “Uncertainty-aware household appliance schedulingconsidering dynamic electricity pricing in smart home,” IEEE Transactions onSmart Grid, vol. 4, pp. 932–941, June 2013.
[80] “Two ways to make U.S. distribution systems self-healing,” IEEE Smart GridNewsletter, vol. February, 2012.
[81] B. Sweet, “Implications of PG&E’s smart meter opt-out,” Energy-wise blog fromIEEE Spectrum, vol. February, 2012.
121

[82] F. Lewis, D. Vrabie, and V. Syrmos, Optimal Control. Wiley, 2012.
[83] H. Taha, Operations Research: An Introduction. Prentice Hall PTR, 2011.
[84] D. P. Bertsekas, Dynamic Programming and Optimal Control. Athena Scientific,3rd ed., 2005.
[85] E. F. Camacho and C. B. Alba, Model Predictive Control, Second Edition.Springer, 2004.
[86] P. Cortes, M. Kazmierkowski, R. Kennel, D. Quevedo, and J. Rodriguez, “Pre-dictive control in power electronics and drives,” IEEE Transactions on IndustrialElectronics, vol. 55, pp. 4312–4324, Dec. 2008.
[87] L. Wang, Model Predictive Control System Design and Implementation UsingMATLAB. Springer Publishing Company, Incorporated, 1st ed., 2009.
[88] D. Nesic, A. Teel, and E. Sontag, “Formulas relating KL stability estimates ofdiscrete-time and sampled-data nonlinear systems,” Systems & Control Letters,vol. 38, no. 1, pp. 49 – 60, 1999.
[89] L. Grune and J. Pannek, Nonlinear Model Predictive Control: Theory and Algo-rithms. Communications and control engineering, Springer, 2011.
[90] I. Nagrath and M. Gopal, Control Systems Engineering. Anshan Ltd Press,United Kingdom, 5th ed., 2008.
[91] A. Vargas-Martınez, “Combining artificial intelligence and robust techniques withMRAC in fault tolerant control,” PhD Thesis, ITESM, Dec 2011.
[92] M. Blanke, Diagnosis and Fault-Tolerant Control. Engineering online library,Springer-Verlag GmbH, 2003.
[93] R. Isermann, Fault-Diagnosis Systems: An Introduction from Fault Detection toFault Tolerance. Springer, 2005.
[94] M. Morari and J. H. Lee, “Model predictive control: past, present and future,”Computers & Chemical Engineering, vol. 23, no. 4–5, pp. 667 – 682, 1999.
[95] F. A. de Almeida and D. LeiBling, “Fault-tolerant model predictive control withflight-test results,” Journal of Guidance, Control, and Dynamics, vol. 33, no. 2,pp. 363 – 375, 2010.
[96] J. M. Maciejowski, “Reconfiguring control systems by optimization.,” in Proceed-ings of the European Control Conference, (Brussels), July 1997.
[97] R. E. Kalman, “A new approach to linear filtering and prediction problems,”Transactions of the ASME–Journal of Basic Engineering, vol. 82, no. Series D,pp. 35–45, 1960.
122

[98] G. Welch and G. Bishop, “An introduction to the kalman filter,” 1995.
[99] Q. Zhao and M. Kinnaert, “Statistical properties of CUSUM based fault detectionschemes for fault tolerant control,” in Decision and Control, 2009 held jointly withthe 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the48th IEEE Conference on, pp. 7831–7836, 2009.
[100] P. Tadic, Z. Durovic, B. Kovacevic, and V. Papic, “Fault diagnosis for steam sepa-rators based on parameter identification and CUSUM classification,” in IndustrialTechnology (ICIT), 2012 IEEE International Conference on, pp. 248–253, 2012.
[101] “Microgrids – large scale integration of micro-generation to low voltage grids,”EU Contract ENK5-CT-2002-00610, May 2002.
[102] Z. Miao and L. Fan, “The art of modeling and simulation of induction generatorin wind generation applications using high-order model.,” Simulation ModellingPractice and Theory, vol. 16, pp. 1239 – 1253, 2008.
[103] D. Yubing, G. Yulei, L. Qingmin, and W. Hui, “Modelling and simulation ofthe microsources within a microgrid,” in Electrical Machines and Systems, 2008.ICEMS 2008. International Conference on, pp. 2667 –2671, oct. 2008.
[104] T.-F. Tsao, P.-H. Chen, and H.-C. Chen, “Dynamic modeling and simulation ofhybrid power systems based on renewable energy,” in Proceedings of the 2009International Conference on Energy and Environment Technology - Volume 01,ICEET ’09, (Washington, DC, USA), pp. 602–605, IEEE Computer Society, 2009.
[105] S.-K. Kim, J.-H. Jeon, C.-H. Cho, J.-B. Ahn, and S.-H. Kwon, “Dynamic mod-eling and control of a grid-connected hybrid generation system with versatilepower transfer,” Industrial Electronics, IEEE Transactions on, vol. 55, no. 4,pp. 1677–1688, 2008.
[106] S. A. Papathanassiou and M. P. Papadopoulos, “Dynamic characteristics of au-tonomous wind–diesel systems,” Renewable Energy, vol. 23, no. 2, pp. 293 – 311,2001.
[107] W. L. Fuchs and E. F. Fuchs International Conference on Renewable Energiesand Power Quality (ICREPQ’12), p. 6, March 2012.
[108] M. Gaiceanu, MATLAB - A Fundamental Tool for Scientific Computing andEngineering Applications - Volume 3. InTech, 2012.
[109] W. Sinsukthavorn, E. Ortjohann, A. Mohd, N. Hamsic, and D. Morton, “Con-trol strategy for three-/four-wire-inverter-based distributed generation,” Indus-trial Electronics, IEEE Transactions on, vol. 59, pp. 3890–3899, Oct 2012.
123

[110] M. P. Kazmierkowski, R. Krishnan, and F. Blaabjerg, Control in power elec-tronics : selected problems / editors, Marian P. Kazmierkowski, R. Krishnan,Frede Blaabjerg. Academic Press series in engineering, Amsterdam ; New York :Academic Press, c2002., 2002.
[111] M. H. Rashid, “Analyses and designs related to renewable energy systems,” inPower Electronics: Circuits, Devices and Applications, pp. 226–303, Pearson US,2003.
[112] H. Abu-Rub, A. Iqbal, and J. Guzinski, High Performance Control of AC Driveswith MATLAB/Simulink Models. Wiley, 2012.
[113] G. K. Dubey in Power Semiconductor Controlled Drives, pp. 226–303, PrenticeHall, NJ, 1998.
[114] J. J. Grainger and W. D. Stevenson, Power system analysis / John J. Grainge,William D. Stevenson, Jr. McGraw-Hill series in electrical and computer engi-neering Power and energy, New York : McGraw-Hill, c1994., 1994.
[115] G. Fusco and M. Russo, Adaptive Voltage Control in Power Systems: Modeling,Design and Applications. Advances in Industrial Control, Springer; 1st Edition.,2006.
[116] R. Munoz-Aguilar, A. Doria-Cerezo, E. Fossas, and R. Cardoner, “Sliding modecontrol of a stand-alone wound rotor synchronous generator,” IEEE Transactionson Industrial Electronics, vol. 58, pp. 4888–4897, Oct. 2011.
[117] B. Kuang, Y. Wang, and Y. L. Tan, “An H∞ controller design for diesel en-gine systems,” in International Conference on Power System Technology, vol. 1,pp. 61–66, 2000.
[118] P. Paraskevopoulos and S. Samiotakis, “State space analysis and optimal controlof time delay systems via taylor series,” in Control, 1994. Control ’94. Interna-tional Conference on, vol. 1, pp. 70 –74 vol.1, march 1994.
[119] L. Zeng and G. D. Hu, “Discretization of continuous-time systems with inputdelays,” Acta Automatica Sinica, vol. 36, no. 10, pp. 1426 – 1431, 2010.
[120] J. Jugo, “Discretization of continuous time-delay systems,” in Proceedings of the15th IFAC World Congress, 2002, pp. 117 – 122, 2002.
[121] J. Lyons, “Wind energy systems,” in CTO personal communication, Novus En-ergy Partners, 2009.
[122] E. Abdin and W. Xu, “Control design and dynamic performance analysis of awind turbine-induction generator unit,” IEEE Transactions on Energy Conver-sion, vol. 15, pp. 91–96, Mar. 2000.
124

[123] R. A. Furat Abdal and M. A. Abdulsada, “Simulation of wind-turbine speedcontrol by MATLAB,” in International Journal of Computer and Electrical En-gineering, vol. 2, pp. 912–915, October 2010.
[124] A. Murdoch, J. Winkelman, S. Javid, and R. Barton, “Control design and perfor-mance analysis of a 6 mw wind turbine-generator,” Power Apparatus and Systems,IEEE Transactions on, vol. PAS-102, pp. 1340 –1347, may 1983.
[125] S. Heier, Grid Integration of Wind Energy Conversion Systems. USA: John Wiley& Sons Ltd, 1998.
[126] E. W. E. Association, Wind Energy - The Facts: ”A Guide to the Technology,Economics and Future of Wind Power”. Taylor & Francis, 2009.
[127] D. Feldman, G. Barbose, R. Margolis, R. Wiser, N. Darghouth, and A. Goodrich,“Photovoltaic (PV) pricing trends: Historical, recent, and near-term projections,”report, 2012.
[128] R. Messenger and J. Ventre, Photovoltaic Systems Engineering. CRC Press, 2004.
[129] M. K. Gupta, R. Jain, and A. Goswami, “Desing and simulation of photovoltaicsystem using advanced MPPT,” International Journal of Advanced Technology& Engineering Research, vol. 2, no. 4, pp. 73–77, 2012.
[130] F. Ding, P. Li, B. Huang, F. Gao, C. Ding, and C. Wang, “Modeling and simu-lation of grid-connected hybrid photovoltaic/battery distributed generation sys-tem,” in China International Conference on Electricity Distribution, pp. 1–10,Sep. 2010.
[131] H. L. Tsai, C. S. Tu, and Y. J. Su, “Development of generalized photovoltaicmodel using MATLAB/Simulink,” World Congress on Engineering and Com-puter Science 2008, no. 1-6, 2008.
[132] K. Kachhiya, M. Lokhande, and M. Patel, “MATLAB/Simulink model of solarPV module and MPPT algorithm,” in National Conference on Recent Trends inEngineering & Technology, pp. 1–5, May 2011.
[133] http://www.solardesigntool.com/components/module-panel-solar/Sunpower/52/SPR-305-WHT/specification-data sheet.html
[134] L. Dingrando in Glencoe Chemistry: Matter and Change, p. 665,Glencoe/McGraw-Hill, 2004.
[135] D. Linden and T. Reddy, Handbook of batteries. McGraw-Hill handbooks,McGraw-Hill, 2002.
[136] J. Chiasson and B. Vairamohan, “Estimating the state of charge of a battery,”IEEE Transactions on Control Systems Technology, vol. 13, pp. 465–470, May2005.
125

[137] S. Pang, J. Farrell, J. Du, and M. Barth, “Battery state-of-charge estimation,”in American Control Conference, 2001. Proceedings of the 2001, vol. 2, pp. 1644–1649 vol.2, 2001.
[138] M. Durrand, A. Cruden, S. Gair, and J. McDonald, “Dynamic model of a leadacid battery for use in a domestic fuel cell system,” Journal of Power Sources,vol. 161, pp. 1400–1411, Oct 2006.
[139] R. Carter, A. Cruden, P. Hall, and A. Zaher, “An improved lead acid batterypack model for use in power simulations of electric vehicles,” IEEE Transactionson Energy Conversion, vol. 27, pp. 21–28, Mar. 2012.
[140] Z. Styczynski, A. Orths, K. Rudion, A. Lebioda, and O. Ruhle, “Benchmark foran electric distribution system with dispersed energy resources,” in Transmissionand Distribution Conference and Exhibition, 2005/2006 IEEE PES, pp. 314–320,2006.
[141] K. Meah and A. Sadrul Ula, “Simulation study of the CIGRE HVDC bench-mark model with the WSCC nine-bus power system network,” in Power SystemsConference and Exposition, 2009. PSCE ’09. IEEE/PES, pp. 1–5, 2009.
[142] B. Mao, B. Zhang, J. Wang, Y. Chen, X. Zheng, Y. Gao, B. Wu, and Y. Liu,“Dynamic modelling for distribution networks containing dispersed generationsand energy storage devices,” in 2010 International Conference on Power SystemTechnology (POWERCON), pp. 1–6, 2010.
[143] S. Tomohiko, S. Tielong, S. Yuanzhang, and X. Jian, “Modeling and controlof a benchmark micro grid with vehicle-to-grid smart connection,” in ControlConference (CCC), 2011 30th Chinese, pp. 6121–6126, 2011.
[144] “IEEE application guide for IEEE std 1547, IEEE standard for interconnectingdistributed resources with electric power systems,” IEEE Std 1547.2-2008, pp. 1–207, 2009.
[145] K. Rudion, A. Orths, Z. Styczynski, and K. Strunz, “Design of benchmark ofmedium voltage distribution network for investigation of dg integration,” in 2006IEEE Power Engineering Society General Meeting, pp. 6 pp.–, 2006.
[146] http://www.homerenergy.com.
[147] A. Kini and U. Yaragatti, “Modelling and simulation of a wind/diesel hybridpower system,” in IEEE International Conference on Industrial Technology,pp. 1670–1675, Dec. 2006.
[148] T. Vandoorn, B. Meersman, L. Degroote, B. Renders, and L. Vandevelde, “Acontrol strategy for islanded microgrids with DC-link voltage control,” IEEETransactions on Power Delivery, vol. 26, pp. 703–713, Apr. 2011.
126

[149] K. Ahmed M. and Y. Ali M., “Robust control of an isolated hybrid wind–dieselpower system using linear quadratic gaussian approach,” International Journalof Electrical Power and Energy Systems, vol. 33, pp. 1092–1100, 2011.
[150] K. Ahmed M., “Robust voltage control of a stand alone wind energy conversionsystem based on functional model predictive approach,” International Journal ofElectrical Power and Energy Systems, vol. 41, pp. 124–132, 2012.
[151] D. Das, S. Aditya, and D. Kothari, “Dynamics of diesel and wind turbine gener-ators on an isolated power system,” International Journal of Electrical Power &Energy Systems, vol. 21, no. 3, pp. 183–189, 1999.
[152] M. Arutchelvi and S. Arul Daniel, “Composite controller for a hybrid power plantbased on PV array fed wind-driven induction generator with battery storage,”International Journal of Energy Research, vol. 31, no. 5, pp. 515–524, 2007.
[153] C. Wang and M. Nehrir, “Power management of a stand-alonewind/photovoltaic/fuel cell energy system,” IEEE Transactions on EnergyConversion, vol. 23, pp. 957–967, Sep. 2008.
[154] N. Ardeshna and B. Chowdhury, “Supporting islanded microgrid operations inthe presence of intermittent wind generation,” in IEEE Power and Energy SocietyGeneral Meeting, pp. 1–8, Jul. 2010.
[155] G. Fusco and M. Russo, “Adaptive voltage regulator design for synchronous gen-erator,” IEEE Transactions on Energy Conversion, vol. 23, pp. 946–956, sept.2008.
[156] F. Giuseppe and R. Mario, “Nonlinear control design for excitation controllerand power system stabilizer,” Control Engineering Practice, vol. 19, pp. 243–251,2012.
[157] B. Kumar, S. Mishra, C. Bhende, and M. Chauhan, “PI controller based fre-quency regulator for distributed generation,” in TENCON - IEEE Region 10Conference, pp. 1–6, Nov. 2008.
[158] B. He and M. Yang, “Robust LPV control of diesel auxiliary power unit for serieshybrid electric vehicles,” IEEE Transactions on Power Electronics, vol. 21, no. 3,pp. 791–798, 2006.
[159] L. Croci, A. Martinez, P. Coirault, and G. Champenois, “Control strategy forphotovoltaic-wind hybrid system using sliding mode control and linear parametervarying feedback,” in IEEE International Conference on Industrial Technology,pp. 205–210, 2012.
[160] G. Kish, J. Lee, and P. Lehn, “Modelling and control of photovoltaic panels util-ising the incremental conductance method for maximum power point tracking,”IET Renewable Power Generation, vol. 6, pp. 259–266, Jul. 2012.
127

[161] A. Adouni, M. Ben Hamed, and L. Sbita, “Application of parity space approachin fault detection of DC motors,” in First International Conference on RenewableEnergies and Vehicular Technology, pp. 446–451, Mar. 2012.
[162] H. Berriri, M. Naouar, and I. Slama-Belkhodja, “Parity space approach for cur-rent sensor fault detection and isolation in electrical systems,” in 8th InternationalMulti-Conference on Systems, Signals and Devices, pp. 1–7, Mar. 2011.
[163] L. E. Garza-Castanon and A. Vargas-Martınez, Artificial Intelligence Methodsin Fault Tolerant Control, Chapter of Book Automation and Control-Theory andPractice. In-TECH, Austria, 2009.
[164] A. Vargas-Martınez and L. E. Garza-Castanon, “Combining artificial intelligenceand advanced techniques in fault-tolerant control,” Journal of Applied Researchand Technology, vol. 9, no. 2, pp. 202–226, 2011.
[165] Y. Zhou, H. Held, W. Klein, K. Majewski, R. Speh, P. E. Stelzig, andC. Wincheringer, “SoftGrid: A green field approach of future smart grid,” inProceeding of the 2nd International Conference on Smart Grids and Green ITSystems, pp. 5–11, May 2013.
[166] A. Tsikalakis and N. Hatziargyriou, “Centralized control for optimizing micro-grids operation,” IEEE Transactions on Energy Conversion, vol. 23, pp. 241–248,March 2008.
[167] J. Pecas Lopes, C. Moreira, and A. Madureira, “Defining control strategies formicrogrids islanded operation,” IEEE Transactions on Power Systems, vol. 21,pp. 916–924, May 2006.
[168] A. Venkat, I. Hiskens, J. Rawlings, and S. Wright, “Distributed MPC strategieswith application to power system automatic generation control,” IEEE Transac-tions on Control Systems Technology, vol. 16, pp. 1192–1206, Nov 2008.
[169] F. Dorfler, John-Simpson-Porco, and F. Bullo, “Breaking the hierarchy: Dis-tributed control & economic optimality in microgrids,” 2014.
[170] C. Taylor, “Concepts of undervoltage load shedding for voltage stability,” IEEETransactions on Power Delivery, vol. 7, pp. 480–488, Apr 1992.
[171] “Ieee guide for design, operation, and integration of distributed resource islandsystems with electric power systems,” IEEE Std 1547.4-2011, pp. 1–54, July 2011.
[172] R. Walling and N. Miller, “Distributed generation islanding-implications on powersystem dynamic performance,” in Power Engineering Society Summer Meeting,2002 IEEE, vol. 1, pp. 92–96 vol.1, July 2002.
[173] J. Zheng, D. Gao, and L. Lin, “Smart meters in smart grid: An overview,” inGreen Technologies Conference, 2013 IEEE, pp. 57–64, April 2013.
128

[174] H. Nourzadeh, A. Fatehi, B. Labibi, and B. Araabi, “An experimental nonlinearsystem identification based on local linear neuro-fuzzy models,” in IEEE Inter-national Conference on Industrial Technology, pp. 2274–2279, Dec 2006.
[175] J.-S. Jang, “Neuro-fuzzy modeling for dynamic system identification,” in Pro-ceedings of the 1996 Asian Fuzzy Systems Symposium, 1996. Soft Computing inIntelligent Systems and Information Processing, pp. 320–325, Dec 1996.
[176] K. Holmstrom, M. M. Edvall, and A. Goran, “Tomlab - for large-scale robustoptimization,” in Proceedings for the Nordic Matlab Conference, 2003.
[177] R. Kunte and W. Gao, “Comparison and review of islanding detection techniquesfor distributed energy resources,” in Power Symposium, 2008. NAPS ’08. 40thNorth American, pp. 1–8, Sept 2008.
[178] J. Zyborski, T. Lipski, J. Czucha, and S. Hasan, “Hybrid arcless low-voltageAC/DC current limiting interrupting device,” IEEE Transactions on Power De-livery, vol. 15, no. 4, pp. 1182–1187, 2000.
[179] K. Handt, G. Griepentrog, and R. Maier, “Intelligent, compact and robust semi-conductor circuit breaker based on silicon carbide devices,” in PESC 2008, IEEEPower Electronics Specialists Conference, pp. 1586–1591, 2008.
[180] J. Mu, L. Wang, and J. Hu, “Analysis and design of topological structure for dcsolid-state circuit breaker,” in WNWEC 2009, World Non-Grid-Connected WindPower and Energy Conference, pp. 1–5, 2009.
[181] J. J. E. Slotine and W. Li, Applied Nonlinear Control. USA: Prentice Hall, 1991.
[182] A. Gattozzi, J. Herbst, F. Uriarte, and R. Hebner, “Analytical description of aseries fault on a dc bus,” in 2012 IEEE PES, Innovative Smart Grid Technologies(ISGT), pp. 1–6, 2012.
129

Appendix A
Microgrid modeling with HomerEnergy
Homer Energy is modeling software that focuses on the optimization of hybridpower systems that meet design criteria established by the user. The basic element of aHomer analysis is a simulation. A simulation, defined by Homer is a set of calculationsthat models the system’s performance over a single year, and calculates the cost ofinstalling and operating the system over a multi-year project lifetime.
HOMER’s strength is its ability to run hundreds and thousands of simulationsvery quickly and to show results for the simulations in ways that allow you to easilycompare different system designs and configurations.
A Homer simulation generates many outputs, among which the following havebeen used in this research:
• The electrical output of each component in the system;
• Load demand generation;
• Weather conditions regarding wind speed and sun irradiation depending on thegeographical location of the system; and
• Feasibility of the system for covering load demand.
A.1 Input requirements
Homer Energy asks the following information for simulating a microgrid:
• A basic description of each component of the hybrid power system, including itssize, installation cost and operating cost;
• Information about the electric load (demand) the system will serve;
• Data describing the renewable source or cost of fuel each component requires.
The microgrid of Figure 4.1 has the following requirements that will be introducedin the software:
130

Table A.1: Input parameters for designing the microgrid
Parameter ValueDEG power 1 MVA∗
PV power 50 kW ∗
Battery power 50 kWh∗
WTG power 1.5 MVA∗
Base wind speed 12 m/sLoad-1 1.5 MWLoad-2 0.25 MWLoad-3 0.5 MWLoad-4 0.25 MW
∗initial iterative values
A.2 Simulation results
A simplified microgrid architecture is shown in Figure A.1, where L1 + L2 isrepresented in a single load, as well as L2 +L3. Below are shown the software outputsregarding the microgrid operation.
Figure A.1: Microgrid architecture designed by Homer Energy
131

Table A.2: Hybrid system architecture
PV array 100 kWWind turbine 1 GE 1.5slGenerator (diesel) 2,000 kWBattery 4 ZESS 50Inverter 200 kWRectifier 200 kWDispatch strategy Cycle charging
Table A.3: Hybrid system electrical parameters
Component Production (kWh/yr) FractionPV array 438,127 2%Wind turbine 8.779,957 44%Generator (diesel) 10,932,407 54%Total 20,1050,492 100%
Table A.4: PV optimization results
Quantity Value UnitsRated capacity 100 kWMean output 48.5 kWHours of operation 4,368 hr/yrTotal prodcution 438,127 kWh/yr
132

Table A.5: AC Wind Turbine: GE 1.5sl optimization results
Variable Value UnitsTotal rated capacity 1,500 kWMean output 1,002 kWCapacity factor 66.8 %Hours of operation 7,557 hr/yrTotal prodcution 8,779,957 kWh/yr
Table A.6: Generator (diesel) optimization results
Quantity Value UnitsElectrical production 19,932,407 kWh/yrMean electrical output 1,254 kWMin. electrical output 900 kWMax. electrical output 2,000 kWFuel consumption 4,825,662 L/yrSpecific fuel consumption 0.441 L/kWhFuel energy input 47,484,516 kWh/yrMean electrical efficiency 23.0 %Hours of operation 8,719 hr/yr
133

Table A.7: Battery optimization results
Quantity Value UnitsNominal capacity 200 kWhUsable nominal capacity 200 kWhAutonomy 0.1 hrEnergy in 2,812 kWh/yrEnergy out 2,025 kWh/yrLosses 787 kWh/yrAnnual throughput 2,386 kWh/yr
Table A.8: Emissions
Pollutant Emissions (kg/yr)Carbon dioxide 12,707,555Carbon monoxide 31,367Unburned hydocarbons 3,474Particulate matter 2,365Sulfur dioxide 25,519Nitrogen oxides 279,888
134

Appendix B
An intelligent control approach fordesigning a low voltage dc breaker
This appendix presents an approach for designing an intelligent low voltage dcbreaker (ILVDCB) using solid-state elements as its power components and an em-bedded processor for implementing control algorithms that command the triggeringprocess of the thyristors. A simplified model for arc voltage is used for designing thecontrol strategies. Intelligent control algorithms such as knowledge based fuzzy control(KBFC), neural control and adaptive neuro-fuzzy inference system (ANFIS) controllerare presented. Details on design and implementation in MATLAB are discussed, aswell as results and comparisons on the performance of every system.
B.1 Introduction
Microgrids are concerned with power generation near the consumers [11], wheredc transmission lines are part of the electrical network. The main reason for not havinga mature technology on dc transmission is that no circuit breaker is available for directcurrent that is comparable to the highly developed ac breakers. The ac breaker canextinguish the arc, which is formed when the breaker opens because zero current occurstwice in the cycle. On the other hand in a dc circuit we have to create an artificial zerocrossing for a safe circuit opening.
A hybrid breaker design for ac/dc is presented in [178]; semiconductor devicesare the core of the design and the control strategy is focused on detecting currentdirection for charging and discharging capacitors which feed coils that are in chargeof generate forces for moving a main switch in order to interrupt the circuit currentwhen demanded. In [179] is studied an ac breaker design with semiconductors, whereintelligent decisions of switching are taken for different load patterns. The well knowntechnique of forced commutation of thyristors is used in [180] for designing a solid-statebreaker where the control technique is only aware of activating every SCR of the designin a coordinated way. Time length of the current excursion to zero where a safe currentinterruption is performed has not been considered in these works. The objective of this
135

research is to use intelligent control algorithms for controlling the current’s time lengthfor reaching the forced zero crossing and then parting the breaker’s contacts.
B.2 Transient analysis in a dc transmission line
The following analysis considers a simple model of a dc transmission line and theevent resulting from a fault (short circuit) near the switching device, as shown in FigureB.1. Equation B.3 represents the short circuit current.
Figure B.1: Simplified model of a dc transmission line facing a fault.
V = Risc(t) + Ldisc(t)
dt(B.1)
V
s= RIsc(s) + LsIsc(s) + Lisc(0) (B.2)
isc(t) =V
R
(1− e−
RLt)
(B.3)
The arc introduced by opening the circuit breaker is a highly nonlinear circuitelement. The total current of the circuit can be considered as the sum of two currents,one due to the short circuit current, isc(t) driven by the source voltage and the other,flowing in the opposite direction, driven by the arc voltage, va(t).
In the particular case of interrupting an ac current, we do so when it passesthrough its natural zero crossing. In dc current, there is no natural zero crossing. Anarc would form if the contacts of an interrupter are parted. Moreover, it is evident thata current zero is an essential requirement for dc interruption, and if this fact doesn’toccur naturally, then somehow it should be created, as it is shown in Figure B.2. Nomatter what is used as a circuit interrupter, certain time will elapse, T1, before the
protective device responds, therefore a current isc(T1) = VR
(1− e−R
LT1
)will be present
in the circuit at the moment of the interruption.
136

Figure B.2: (a) Fault current excursion to zero; (b) Arc voltage model.
137

Figure B.2(a) shows an ideal case for the current interruption in order to avoida dangerous arc voltage in the breaker terminals due to an abrupt interruption. Theoscillation present in the current response signal is called chatering and is due to theswitching control signal [181]. So far, the general concept has been explained, it istime to perform an arc voltage modeling in order to use it in the design of the controlalgorithm. Before start analyzing the equivalent circuit, it is easy to imagine that it willbe composed of two voltage sources opposing one to the other, one due to the sourcevoltage and the other driven by the arc voltage. Moreover considering the hypotheticarc voltage depicted in Figure B.2(b), the following equations have been developed:
va [isc(T1)] = vo(t) (B.4)
va(T2) = 2vo(t) (B.5)
vo(t) = isc(t)R + Lisc(T1)
T2 − T1
(B.6)
va(t) =vo(t)
T2 − T1
(t− T1) + vo(t) (B.7)
m(t) =vo(t)
T2 − T1
(B.8)
va(t) = m(t) (t− T1) + vo(t) (B.9)
di(t)
dt= −R
Li(t)− vo(t) +m(t)t
L+V
L(B.10)
where va(t) is the arc voltage, vo(t) is the initial value of va(t) when a fault occurs andisc(t) is the short circuit current. Even though it was intended to represent va(t) as alinear model from Figure B.2, it’s clearly seen that the arc voltage model is a complexnonlinear relation, not easy to predict. Hereafter the transient analysis including thearc voltage in the circuit is considered. For this analysis: T1 = 0, i(0) = isc(T1), R = 10,L = 100 mH, va [isc(T1)] = 30 and V = 100. For solving equation B.10 we have usednumerical simulations in order to understand the behavior of the current and the arcvoltage, whose solution is shown in Figure B.3. From the comparison of Figure B.2(a)with Fig. B.3 it is possible to see that our simplified model, equation B.10 representsthe closed loop dynamics of our system, and from its graphical analysis we will derivethe fuzzy rule set for the KBFC. An extended analytical model of the dc arc voltage,validated with experimental data is described in [182].
B.3 ILVDCB design
Semiconductor circuit breakers are used for switch short-circuit currents off, theylimit the duration and peak level of short-circuits much more effectively than mechan-ical switches [179]. Before establishing criteria design, it is important to consider thedesired behavior of the ILVDCB for isolating a fault. The following aspects need to beconsidered for designing our intelligent breaker:
138

Figure B.3: Numerical solution to equation B.10. Current excursion to zero.
• A soft switching strategy for minimizing the traveling wave transient.
• A control strategy for the solid state switching devices.
• Proper instrumentation devices for voltage and current measurements.
• Some kind of an additional voltage source is needed for opposing the main sourcevoltage in order to bring the circuit current (fault current) to zero.
B.3.1 Power Electronics Design
It is quite important designing the power electronic circuit before we proceed tothe control strategies design. Considering the general aspects presented so far, we havetaken as reference the power electronic circuit shown in Figure B.4 that is proposedin [180]. Thyristors T36 and T65 has been replaced with GTO for planning our controlstrategies. T65 is in charge of adding vC in opposition to the main voltage source,meanwhile T36 is the main switch and will open when current reaches zero. The generaloperation of the circuit is as follows:
• Turning on: Thyristors T12 and T21 are first turned on in order to implementa soft switching strategy, due to inductances L1 and L2 are in series with the
139

load. After the load voltage reaches the source voltage minus drop voltage inthe semiconductors, T36 and T43 are activated while the transient voltage of thecapacitor deactivates T12 and T21.
• Turning off: T65 is switched on and off through a PWM signal in order to opposecapacitor voltage to source voltage and allow a current excursion to zero. Oncethe circuit’s current is zero or near zero, T36 is deactivated.
Figure B.4: Circuit design for the ILVDCB
B.3.2 Controller design
A first approach using a PID algorithm was tested, unfortunately due to thehigh non-linearity of the plant it was impossible to achieve the desired behavior in thecircuit and instabilities were obtained instead. Therefore, three different approachesfor nonlinear intelligent control were used: KBFC, artificial neural network (ANN)controller and an ANFIS controller.
Knowledge Based Fuzzy Controller
Designing a fuzzy controller demands certain knowledge of the plant behavior inorder to propose a set of rules for controlling the system. The following considerationshave been taken into account for the KBFC design:
140

• The current error (desired current behavior − current measured from the circuit)and its derivative are used as input signals for the controller.
• The controller ouput, u(t) will generate a PWM signal for controlling the switch-ing operation of the GTO T65.
• Once the current reaches zero or a value close to zero, current interruption isallowed.
In Figure B.5 are depicted the fuzzy sets used for the KBFC, and Table I summa-rizes the rules used for this controller.
Figure B.5: Fuzzy sets used in the KBFC.
Table B.1: Set of rules used in the KBFC.
de(t)N Z P
N N N Ze(t) Z N Z P
P Z P P
A complete simulation cycle is shown in Figure B.6, where both the turning on andturning off processes have been performed. When the ILVDCB interrupts the current
141

of the circuit, as we stated before, the current is brought to zero through the oppositevoltage of the capacitor in coordination with the controller’s signals. The only voltagethat the ILVDCB terminals see is the voltage from the source. This result is veryimportant, because it has been the main concern of this design, to take the transientrecovery voltage (TRV) near to zero.
Figure B.6: Voltage output simulation (KBFC).
Neuronal controller
When data is available from the system instead of a set of rules, neural networkscontrollers (NNC) are preferred. In this particular case, the design was performed fromthe data obtained from a random sweep applied to the inputs of the KBFC. A completeset of training of 1000 samples was obtained and using this data set a n-m-p multilayerperceptron architecture was chosen, with n = 1, m = 10 and p = 1 values for theinput, hidden and output layer, respectively. It is important to remark that the onlychange made in the controller architecture in the simulation block was replacing theKBFC for the NNC.
Adaptive neuro-fuzzy inference system controller
Neural networks can be used in fuzzy modeling and control to provide fuzzy sys-tems with learning capabilities. These methods lead to a neural-fuzzy system. This
142

approach is easily driven to practice using Matlab as design platform. Using the an-fisedit tool of Matlab, and the same data set used for training the neural network, itis possible to obtain a new adaptive controller (ANFIS controller) whose behavior iscompared with the other two in Figure B.7.
B.4 Performance analysis of the designs
A unique electronic circuit design is used, although three different control strate-gies have been tested. Figure B.7 compares the performance of the control algorithmsfor achieving current excursion to zero in the specified time, in this case 30 ms. TableB.2 summarizes a performance comparison of the control strategies regarding energyconsumption during the turning-off process and the time every controller took for iso-lating the fault.
Figure B.7: Current excursion to zero comparison for the control algorithms.
ANFIS Controller exhibits a much better performance than FUZZY and NNC inboth aspects evaluated, energy dissipation during the turning off process and responsetime. ANFIS Controller achieve the zero current crossing in exactly 30 ms, comparedwith Fuzzy and Neural Network controllers which have 4 and 5 ms of error. Energydissipation is less in ANFIS Controller than KBFC and NNC, which leads to the obviousconclusion of a better performance.
143

Table B.2: Performance Comparison of the Control Algorithms
Controller Type Response Time Dissipated Energy on T36
ANFIS 30 ms 0.74 JKBFC 34 ms 0.85 JNNC 35 ms 0.87 J
B.5 Conclusion
Electronic switches allow us to add intelligence to protective devices thanks to thereal time measurements that they bring integrated, making switches highly efficient.Even though ANFIS controller showed better performance, the three designs presentedand tested in this research work reached the main goal that was to maintain the TRVnear zero volts and to guarantee a secure circuit interruption, preserving the breaker’scomponents integrity.
144

Appendix C
Technical papers related to thethesis
This appendix presents a compendium of all the papers related to this thesis thathas been published in JCR indexed journals or presented in international conferences.
145

Curriculum Vitae
Luis Ismael Minchala Avila was born in Azogues, Ecuador. He received the degreeof Bachelor of Science in Electronics (2006), from Universidad Politecnica Salesiana,Cuenca, Ecuador; and the degree of Master of Science in Automation (2011) fromITESM, Campus Monterrey, Mexico. He is also a consultant specializing in the analysisand design of automatic control systems, and a Ph.D. candidate at ITESM’s Deparmentof Mechatronics and Automation. From August 2012 to August 2013 he has been avisiting scholar at the Department of Mechanical and Industrial Engineering, ConcordiaUniversity, Canada. His research interests include optimal and predictive control formicrogrids.
146