Embed Size (px)
Citation preview

MODELAGEM VISCO-HIPERELÁSTICA E DE EFEITO MULLINS DE POLIURETANO
PARA APLICAÇÃO EM ENRIJECEDORES À FLEXÃO
Bruno Pinho dos Reis
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Mecânica, COPPE, da Universidade Federal do
Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Mecânica.
Orientadores: Lavinia Maria Sanabio Alves
Borges
Daniel Alves Castello
Rio de Janeiro
Junho de 2015

ii
MODELAGEM VISCO-HIPERELÁSTICA E DE EFEITO MULLINS DE POLIURETANO
PARA APLICAÇÃO EM ENRIJECEDORES À FLEXÃO
Bruno Pinho dos Reis
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM
CIÊNCIAS EM ENGENHARIA MECÂNICA.
Examinada por:
________________________________________________ Prof. Lavinia Maria Sanabio Alves Borges, D. Sc.
________________________________________________ Prof. Daniel Alves Castello, D. Sc.
________________________________________________ Prof. Marysilvia Ferreira da Costa, D. Sc.
________________________________________________ Prof. Carlos Magluta, D. Sc.
RIO DE JANEIRO, RJ - BRASIL
JUNHO DE 2015

iii
Reis, Bruno Pinho dos
Modelagem Visco-Hiperelástica e de Efeito Mullins de
Poliuretano para Aplicação em Enrijecedores à Flexão /
Bruno Pinho dos Reis. – Rio de Janeiro: UFRJ/COPPE,
2015.
XV, 170 p.: il.; 29,7 cm.
Orientadores: Lavinia Maria Sanabio Alves Borges
Daniel Alves Castelo
Dissertação (mestrado) – UFRJ/ COPPE/ Programa
de Engenharia Mecânica, 2015.
Referências Bibliográficas: p. 167-170
1. Elastômeros. 2. Visco-hiperelasticidade. 3. Efeito
Mullins. I. Borges, Lavinia Maria Sanabio Alves et al. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Mecânica. III. Título.

iv
À minha esposa Laís
Aos meus pais Maria Cristina e Yvan

v
AGRADECIMENTOS
Aos professores da COPPE pelos conhecimentos transmitidos ao longo do
meu curso de mestrado, em particular à minha orientadora Lavinia Maria Sanabio
Alves Borges por ter me guiado na direção correta para o desenvolvimento deste
trabalho.
À Petrobras, por reconhecer a importância do desenvolvimento intelectual de
seus funcionários e permitir a dedicação em tempo parcial para a realização deste
estudo. Em particular, agradeço ao Arthur Curty Saad, gerente de Tecnologia de Dutos
e Risers, por compreender a necessidade de dedicação de algumas horas semanais
ao mestrado. Ao Ricardo Wagner Capllonch, por me auxiliar na escolha de um tema
relevante para o meu mestrado. Ao Anderson Barata Custódio, pelo auxílio na
fundamentação teórica do estudo de materiais elastoméricos e sua aplicação em
Enrijecedores à Flexão.
Ao Laboratório de Ensaios Mecânicos do Instituto de Macromoléculas (IMA)
da Universidade Federal do Rio de Janeiro, em particular ao professor Victor Jayme
Roget Rodriguez Pita, por disponibilizar o equipamento necessário para a
caracterização experimental do material de estudo.
À minha esposa Laís Piazza, ao companheirismo e compreensão
incondicional de minha dedicação, e principalmente da minha ausência, durante a
realização deste trabalho, particularmente na etapa final de conclusão.
Aos meus pais Maria Cristina Pinho dos Reis e Yvan Pacheco dos Reis, por
toda dedicação e apoio ao longo de toda minha vida.
vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
MODELAGEM VISCO-HIPERELÁSTICA E DE EFEITO MULLINS DE POLIURETANO
PARA APLICAÇÃO EM ENRIJECEDORES À FLEXÃO
Bruno Pinho dos Reis
Junho/2015
Orientadores: Lavinia Maria Sanabio Alves Borges
Daniel Alves Castello
Programa: Engenharia Mecânica
Em um típico campo de produção de petróleo offshore, é necessário interligar
os poços de petróleo à Unidade Estacionária de Produção por meio de dutos
submarinos. A tecnologia de duto flexível é amplamente utilizada no riser, trecho de
duto suspenso entre a plataforma e o leito marinho, e como há uma grande
descontinuidade de rigidez entre o riser flexível e a plataforma, utiliza-se Enrijecedores
à Flexão (Bend Stiffeners) para prover uma transição gradual de rigidez entre estas
estruturas.
Os Enrijecedores à Flexão são normalmente compostos por cones
elastoméricos de poliuretano, material de alto desempenho que apresenta
comportamento mecânico viscoelástico, sujeito a perda de rigidez e deformações
residuais sob solicitações cíclicas.
Aliando o complexo comportamento mecânico do material com a dinâmica
característica dos risers, é necessário conhecer detalhadamente a resposta do
elastômero de poliuretano para que um Enrijecedor à Flexão seja dimensionado de
maneira adequada.
Com este objetivo, foi desenvolvido um modelo visco-hiperelástico e de efeito
Mullins, de forma a predizer o estado de tensão e deformação do elastômero de
poliuretano sob carregamentos cíclicos em diferentes níveis de deformação e taxas de
carregamento.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
VISCO-HYPERELASTIC MODEL WITH MULLINS EFFECT OF POLYURETHANE
FOR BEND STIFFENERS
Bruno Pinho dos Reis
June/2015
Advisors: Lavinia Maria Sanabio Alves
Daniel Alves Castello
Department: Mechanical Engineering
On a typical offshore oilfield, it is necessary to connect the subsea equipment
to the production facilities at the floating production units by subsea pipelines. Flexible
pipe technology is widely used for the riser, the hanged part of a subsea pipeline
between the platform and the seabed. The flexible riser is a structure with low relative
stiffness, while the connecting equipment on the platform is a stiffer component. In
order to avoid damage on the riser in vicinity of the connection, Bend Stiffeners are
used to provide a continuous stiffness transition between these structures.
The Bend Stiffener typical design consists on a polyurethane elastomer cone,
a high performance material with viscoelastic mechanical behavior, which can undergo
to stress softening and residual strains under cyclic loads.
Combining the complex material mechanical behavior with the riser dynamic
response, it is needed to understand the stress-strain behavior of the polyurethane
elastomer to properly design a Bend Stiffener.
Aiming this objective, this study presents visco-hyperelastic model with Mullins
effect in order to predict the polyurethane elastomer mechanical behavior under cyclic
loads for different strain ratios and strain rates.

viii
Sumário
Lista de Figuras ............................................................................................................ x
Lista de Tabelas ......................................................................................................... xv
1. Introdução .............................................................................................................. 1
1.1. Importância do petróleo na matriz energética global e brasileira ..................... 1
1.2. Revisão Bibliográfica ...................................................................................... 4
1.3. Motivação de estudo ....................................................................................... 7
2. Importância do Enrijecedor à Flexão em um campo de produção offshore ............ 8
2.1. A tecnologia riser ............................................................................................ 8
2.1.1. Estrutura típica de um riser flexível ........................................................ 10
2.1.2. Acessórios do riser flexível .................................................................... 12
2.1.3. Sistemas de suportação de risers flexíveis e sua influência no projeto do
Enrijecedor à Flexão ............................................................................................ 13
2.2. Dimensionamento de um Enrijecedor à Flexão ............................................. 15
3. Comportamento mecânico de materiais elastoméricos ........................................ 18
3.1. Conceitos básicos de polímeros e comportamento de elastômeros .............. 18
3.1.1. Elastômero de poliuretano ..................................................................... 20
3.2. Equações constitutivas hiperelásticas........................................................... 26
3.2.1. Tratamento termodinâmico estatístico ................................................... 28
3.2.1.1. Modelo Neo Hookeano por termodinâmica estatística. ...................... 35
3.2.1.2. Modelo de Arruda-Boyce .................................................................... 47
3.2.2. Tratamento fenomenológico .................................................................. 51
3.2.2.1. Modelo Neo Hookeano por tratamento fenomenológico. .................... 55
3.2.2.2. Modelo de Mooney-Rivlin ................................................................... 56
3.2.2.3. Modelo de Ogden............................................................................... 56
3.2.2.4. Modelo de Yeoh ................................................................................. 56
3.2.2.5. Modelo Polinomial .............................................................................. 57
3.2.2.6. Modelo Polinomial Reduzido .............................................................. 57
3.2.3. Comentários sobre abordagens para obtenção de equações constitutivas
hiperelásticas ....................................................................................................... 57
3.3. Comportamento viscoelástico ....................................................................... 58
3.3.1. Viscoelasticidade linear ......................................................................... 59
3.3.1.1. Modelo de Kelvin-Voigt ...................................................................... 60
3.3.1.2. Modelo de Maxwell ............................................................................ 61

ix
3.3.1.3. Modelo Sólido Padrão ........................................................................ 63
3.3.2. Modelo de Bergstrom-Boyce – viscoelasticidade não-linear aplicada a
elastômeros ......................................................................................................... 67
3.4. Efeito Mullins ................................................................................................ 74
3.4.1. Abordagens para obtenção de modelos constitutivos de efeito Mullins . 80
3.4.2. Modelo de Ogden-Roxburgh de perda de rigidez por efeito Mullins ....... 80
3.4.3. Modelos de deformação residual por efeito Mullins ............................... 86
3.4.3.1. Plasticidade isotrópica com encruamento linear ................................. 87
3.4.3.2. Modelo de Dorfmann-Ogden .............................................................. 89
4. Caracterização experimental de elastômero de poliuretano para aplicação em
Enrijecedores à Flexão ............................................................................................... 93
4.1. Material obtido para os ensaios .................................................................... 93
4.2. Ensaios de tração monotônica ...................................................................... 95
4.3. Ensaios cíclicos .......................................................................................... 100
4.4. Investigação da presença de tensão de escoamento ................................. 111
5. Identificação de parâmetros para modelagem de elastômero de poliuretano ..... 113
5.1. Parâmetros de modelo hiperelástico ........................................................... 113
5.2. Parâmetros de modelo viscoelástico não-linear .......................................... 124
5.3. Parâmetros de modelo de efeito Mullins ..................................................... 132
5.4. Verificação do comportamento do modelo obtido em solicitações cíclicas .. 139
6. Modelo visco-hiperelástico proposto para modelagem de elastômero de
poliuretano ................................................................................................................ 143
7. Exemplos de aplicação do modelo proposto ...................................................... 153
7.1. Efeito da natureza da solicitação no comportamento do elastômero de
poliuretano ............................................................................................................ 153
7.2. Aplicação do modelo em resultados experimentais de variedade distinta de
elastômero de poliuretano ..................................................................................... 156
8. Considerações finais ......................................................................................... 165
Referências Bibliográficas ........................................................................................ 167

x
Lista de Figuras
Figura 1.1 – Recursos energéticos primários no mundo [1] ......................................... 1
Figura 1.2 – Evolução do consumo final energético no Brasil [2] .................................. 2
Figura 1.3 – Oferta x demanda mundial de petróleo 2013-2030 [3] ............................... 2
Figura 1.4 – Enrijecedor à Flexão ou Bend Stiffener [4] ................................................ 3
Figura 1.5 – Regiões críticas de um Enrijecedor à Flexão ............................................ 5
Figura 1.6 – Ensaio de fadiga considerando região característica de falha (contato com
o toróide). Ensaio (esquerda) e formato do corpo de prova (direita) ............................. 5
Figura 2.1 – Esforços dinâmicos típicos em um riser .................................................... 9
Figura 2.2 – Configuração Lazy-Wave de um riser ....................................................... 9
Figura 2.3 – Camadas típicas de um riser flexível ....................................................... 11
Figura 2.4 – Conector de extremidade ........................................................................ 12
Figura 2.5 – Foto de Enrijecedor à Flexão .................................................................. 12
Figura 2.6 – Suporte Castelo de riser flexível – vista lateral e detalhe de fixação ....... 13
Figura 2.7 – Suporte Cônico de riser flexível – vista em corte e detalhe de fixação .... 14
Figura 2.8 – Sistema de Boca de Sino para suportação de riser flexível ..................... 15
Figura 2.9 – Esforços atuantes em um Enrijecedor à Flexão ...................................... 16
Figura 3.1 – Reação de polimerização do polietileno [4] ............................................. 19
Figura 3.2 – Vulcanização da borracha natural [21] .................................................... 20
Figura 3.3 – Estrutura de repetição do elastômero de poliuretano .............................. 21
Figura 3.4 – Estrutura de elastômero de poliuretano .................................................. 22
Figura 3.5 – Comparação do processamento de borracha natural e poliuretano
termoplástico .............................................................................................................. 23
Figura 3.6 – Comportamento do poliuretano termoplástico em função da temperatura
[21] ............................................................................................................................. 24
Figura 3.7 – Escala de dureza Shore – Faixas de dureza de aplicação do elastômero
de poliuretano ............................................................................................................. 26
Figura 3.8 – Desenho esquemático de conformações possíveis de cadeia polimérica, a
depender de sua distância entre extremidades ........................................................... 36
Figura 3.9 – Distância entre extremidades de uma cadeia polimérica livre ................. 37
Figura 3.10 – Modelo de célula unitária com oito cadeias poliméricas. Condição de
elastômero não deformado (esquerda) e deformado (direita) ..................................... 49
Figura 3.11 – Representação gráfica de um elemento mecânico elástico (esquerda) e
de um elemento mecânico viscoso (direita) ................................................................ 60
Figura 3.12 – Representação gráfica do modelo viscoelástico linear de Kelvin-Voigt . 60

xi
Figura 3.13 – Representação gráfica do modelo viscoelástico linear de Maxwell ....... 61
Figura 3.14 – Representação gráfica do modelo viscoelástico linear de Maxwell ....... 63
Figura 3.15 – Representação unidimensional do modelo de Bergstrom-Boyce .......... 69
Figura 3.16 – Decomposição multiplicativa de deformação do modelo de Bergstrom-
Boyce ......................................................................................................................... 70
Figura 3.17 – Modelo de cadeia polimérica com uma cadeia livre .............................. 73
Figura 3.18 – Curva característica do efeito Mullins .................................................... 76
Figura 3.19 – Teoria de origem física de efeito Mullins por ruptura de ligações [39] .. 77
Figura 3.20 – Teoria de origem física de efeito Mullins por ruptura de carga ou domínio
cristalino [39] ............................................................................................................. 78
Figura 3.21 – Teoria de origem física de efeito Mullins por eliminação de interferência
física da rede polimérica [39] ...................................................................................... 78
Figura 3.22 – Teoria de origem física de efeito Mullins devido a rotação do domínio
cristalino ..................................................................................................................... 79
Figura 3.23 – Comportamento da variável de dano “η1” em função da energia de
deformação do elastômero ......................................................................................... 85
Figura 3.24 – Comportamento característico do modelo de Ogden-Roxburgh ............ 86
Figura 3.25 – Representação unidimensional do modelo de plasticidade para
deformação residual por efeito Mullins [45] ................................................................. 87
Figura 3.26 – Comportamento da variável de dano “η2” em função da energia de
deformação do elastômero ......................................................................................... 92
Figura 4.1 – Placa de elastômero de poliuretano ........................................................ 93
Figura 4.2 – Corpo de prova obtido a partir de cunhagem da placa ............................ 94
Figura 4.3 – Identificação de corpos de prova da placa II ........................................... 94
Figura 4.4 – Ensaio de tração monotônica .................................................................. 95
Figura 4.5 – Resultados individuais de ensaio de tração monotônica. Velocidade de
500mm/min ................................................................................................................. 96
Figura 4.6 – Resultados médios de ensaio de tração monotônica. Velocidade de
500mm/min ................................................................................................................. 97
Figura 4.7 – Ensaio de tração instantes antes da ruptura do material ......................... 98
Figura 4.8 – Comparação de corpo de prova rompido com outro não testado ............ 98
Figura 4.9 – Resultados individuais de ensaio de tração monotônica. Velocidade de
150mm/min ................................................................................................................. 99
Figura 4.10 – Resultados individuais de ensaio de tração monotônica. Velocidade de
10mm/min ................................................................................................................. 100
Figura 4.11 – Resultados obtidos dos ensaios de tração monotônica ....................... 100
xii
Figura 4.12 – Programação de controle de deformação dos ensaios cíclicos –
deformação progressiva ........................................................................................... 101
Figura 4.13 – Resultados individuais de ensaio cíclico – 10mm/min ......................... 102
Figura 4.14 – Situação ao fim de ensaio cíclico – flambagem evidenciando a
ocorrência de deformações residuais no corpo de prova .......................................... 103
Figura 4.15 – Metodologia para determinação de deformações residuais – corpo de
prova II-1 do ensaio cíclico em 10mm/min ................................................................ 104
Figura 4.16 – Resultados individuais de ensaio cíclico – 150mm/min ....................... 105
Figura 4.17 – Resultados individuais de ensaio cíclico – 500mm/min ....................... 105
Figura 4.18 – Resultados obtidos dos ensaios cíclicos ............................................. 106
Figura 4.19 – Influência da deformação máxima e da tensão máxima na deformação
residual do elastômero de poliuretano ...................................................................... 107
Figura 4.20 – Comparação de resultados obtidos dos ensaios de tração e cíclicos .. 108
Figura 4.21 – Curvas de carregamento dos ensaios cíclicos .................................... 108
Figura 4.22 – Curvas normalizadas de carregamento dos ensaios cíclicos .............. 109
Figura 4.23 – Programação de controle de deformação dos ensaios cíclicos –
deformação máxima cíclica....................................................................................... 110
Figura 4.24 – Resultados individuais de ensaio cíclico com deformação máxima cíclica
– 150mm/min ............................................................................................................ 110
Figura 4.25 – Programação de controle de deformação para verificação de tensão de
escoamento .............................................................................................................. 111
Figura 4.26 – Resultados individuais de ensaio cíclico para verificação de tensão de
escoamento – 10mm/min .......................................................................................... 112
Figura 5.1 – Ajuste de equações constitutivas hiperelásticas – Modelos Neo
Hookeano, Mooney-Rivlin, Ogden e de Yeoh ........................................................... 118
Figura 5.2 – Ajuste de equações constitutivas hiperelásticas – Modelos Polinomial
(“N=2” e “N=3”), Polinomial Reduzido e de Arruda-Boyce ......................................... 119
Figura 5.3 – Análise de estabilidade dos modelos hiperelásticos – Modelos Neo
Hookeano, Mooney-Rivlin, Ogden e de Yeoh ........................................................... 122
Figura 5.4 – Análise de estabilidade dos modelos hiperelásticos – Modelos Polinomial
(“N=2” e “N=3”), Polinomial Reduzido e de Arruda-Boyce ......................................... 122
Figura 5.5 – Modelo hiperelástico de Ogden – equação hiperelástica adotada para
descrever o comportamento do elastômero de poliuretano ....................................... 124
Figura 5.6 – Ajuste do modelo viscoelástico de Bergstrom-Boyce ............................ 132
Figura 5.7 – Referência experimental para identificação de parâmetros para modelo de
efeito Mullins ............................................................................................................. 133

xiii
Figura 5.8 – Ajuste de efeito Mullins por plasticidade de von Mises e modelo de
Ogden-Roxburgh ...................................................................................................... 135
Figura 5.9 – Ajuste de efeito Mullins pelo modelo de Dorfmann-Ogden .................... 139
Figura 5.10 – Comparação entre modelo e experimento para velocidade de travessão
de 10mm/min ............................................................................................................ 141
Figura 5.11 – Comparação entre modelo e experimento para velocidade de travessão
de 150mm/min .......................................................................................................... 141
Figura 5.12 – Comparação entre modelo e experimento para velocidade de travessão
de 500mm/min .......................................................................................................... 142
Figura 6.1 – Decomposição multiplicativa de deformação do modelo viscoelástico
proposto.................................................................................................................... 145
Figura 6.2 – Representação unidimensional do modelo viscoelástico proposto ........ 149
Figura 6.3 – Ajuste do modelo visco-hiperelástico proposto...................................... 149
Figura 6.4 – Comparação entre modelo e experimento visco-hiperelástico proposto
para velocidade de travessão de 10mm/min ............................................................. 151
Figura 6.5 – Comparação entre modelo visco-hiperelástico proposto e experimento
para velocidade de travessão de 150mm/min ........................................................... 151
Figura 6.6 – Comparação entre modelo visco-hiperelástico proposto e experimento
para velocidade de travessão de 500mm/min ........................................................... 152
Figura 7.1 – Comportamento do elastômero de poliuretano em uma solicitação cíclica
de controle de deformação ....................................................................................... 154
Figura 7.2 – Comportamento do elastômero de poliuretano em uma solicitação cíclica
de controle de tensão ............................................................................................... 155
Figura 7.3 – Comparação do comportamento do elastômero de poliuretano em
solicitação cíclica de controle de deformação e de controle de tensão ..................... 155
Figura 7.4 – Comparação entre especificações de dureza das duas variedades de
elastômero de poliuretano estudadas ....................................................................... 156
Figura 7.5 – Ensaios realizados em elastômero de poliuretano com dureza Shore
85/95 A [8] ................................................................................................................ 157
Figura 7.6 – Comparação de resultados de ensaios de tração monotônica das
diferentes variedades de elastômero de poliuretano ................................................. 158
Figura 7.7 – Aplicação do modelo visco-hiperelástico proposto em PU 85/95A –
resultados de tração monotônica .............................................................................. 160
Figura 7.8 – Aplicação do modelo visco-hiperelástico proposto em PU 85/95A –
resultados de carregamentos cíclicos ....................................................................... 160
Figura 7.9 – Variação do módulo de armazenamento com a variação da deformação
média – comparação entre modelo e experimento para o PU85/95A ....................... 163

xiv
Figura 7.10 – Variação do módulo de armazenamento com a variação do intervalo de
deformação – comparação entre modelo e experimento para o PU85/95A .............. 163
Figura 7.11 – Variação do módulo de armazenamento com a variação do período de
solicitação – comparação entre modelo e experimento para o PU85/95A ................. 164

xv
Lista de Tabelas
Tabela 4.1 – Tempo de ensaio e deformação residual dos ensaios cíclicos ............. 106
Tabela 5.1 – Coeficientes dos modelos hiperelásticos obtidos pelo método dos
mínimos quadrados .................................................................................................. 119
Tabela 5.2 – Taxa de deformação de engenharia em função da velocidade de
travessão do ensaio .................................................................................................. 131
Tabela 5.3 – Coeficientes do modelo viscoelástico de Bergstrom-Boyce obtido pelo
método dos mínimos quadrados ............................................................................... 132
Tabela 5.4 – Dados experimentais de “tensão de escoamento” versus “deformação
residual” .................................................................................................................... 134
Tabela 5.5 – Parâmetros para modelagem de deformação residual do elastômero de
poliuretano por encruamento linear ........................................................................... 135
Tabela 5.6 – Coeficientes de efeito Mullins por plasticidade de von Mises e modelo de
Ogden-Roxburgh ...................................................................................................... 136
Tabela 5.7 – Coeficientes de efeito Mullins pelo modelo de Dorfmann-Ogden ......... 139
Tabela 5.8 – Coeficientes de modelo visco-hiperelástico para elastômero de
poliuretano com dureza Shore 60 D .......................................................................... 140
Tabela 6.1 – Coeficientes do modelo viscoelástico proposto .................................... 150
Tabela 6.2 – Coeficientes de modelo visco-hiperelástico proposto para elastômero de
poliuretano com dureza Shore 60 D .......................................................................... 150
Tabela 7.1 – Coeficientes de modelo visco-hiperelástico proposto em PU 85/95A ... 160

1
1. Introdução
1.1. Importância do petróleo na matriz energética global e brasileira
A obtenção de fontes de energia é essencial para a sociedade moderna,
exercendo extrema importância tanto no setor econômico quanto no social. A Figura
1.1 mostra a evolução dos recursos energéticos primários em todo o mundo,
apresentando a evolução nas últimas duas décadas e a projeção para os próximos
anos.
Figura 1.1 – Recursos energéticos primários no mundo [1]
Apesar dos esforços globais em alterar a matriz energética para fontes
renováveis, ainda é esperado que os combustíveis fósseis sejam a principal fonte nos
próximos anos [1], e dentre os diversos combustíveis fósseis disponíveis, o petróleo se
destaca como umas das principais fontes energéticas utilizadas em todo o mundo.
No Brasil, a situação não é diferente. O consumo de petróleo e gás natural
corresponde atualmente a aproximadamente 47,8% do consumo energético total no
Brasil, e é esperado que este percentual de consumo permaneça praticamente
constante na próxima década, atingindo o percentual de 46,8% do consumo total em
2022. Neste período o consumo de petróleo e gás natural deve aumentar de 119,9
milhões para 172,3 milhões de toneladas equivalentes de petróleo, representando um
aumento de aproximadamente 43,7% da demanda desta fonte de energia [1]. Com
isto, pode-se afirmar que o petróleo continuará a ser uma importante fonte energética
nas próximas décadas. A Figura 1.2 mostra a evolução prevista do consumo
energético no Brasil na próxima década.
0
2000
4000
6000
8000
10000
12000
14000
16000
18000
20000
1993 2002 2011 2020
MM
te
p
Hidrelétrica
Renováveis
Fósseis
Nuclear

2
Figura 1.2 – Evolução do consumo final energético no Brasil [2]
Os campos de produção de petróleo e gás apresentam a característica de
apresentarem declínio de produtividade ao longo do tempo. Desta forma, é necessário
o desenvolvimento de novos projetos para, além de manter a capacidade produtiva,
prover oferta adicional para atender a demanda crescente deste recurso energético. A
Figura 1.3 mostra uma previsão da oferta e da demanda mundial de petróleo até o ano
de 2030.
Figura 1.3 – Oferta x demanda mundial de petróleo 2013-2030 [3]
0
50.000
100.000
150.000
200.000
250.000
300.000
350.000
400.000
2012 2014 2016 2018 2020 2022 2024
mil
tep
Consumo total
Petróleo/Gás
3
Ainda da Figura 1.3, observa-se que, nos próximos anos, grande parte dos
novos projetos de produção se encontram no Brasil, notadamente pela entrada em
produção do polo pré-sal.
Os campos de produção de produção do pré-sal são em região offshore, em
lâmina d´água superior a 2.000 metros e a uma distância de até 300 quilômetros da
costa. Devido à dificuldade de acesso para inspeção e manutenção nesta área,
especial atenção deve ser dada à confiabilidade dos equipamentos envolvidos na
produção, de forma a reduzir o risco de falha dos mesmos, que pode resultar em
perda de produção e/ou impacto para o meio ambiente.
Dentre estes equipamentos, o riser, como é denominado o trecho dos dutos
offshore entre o leito marinho e a plataforma, necessita resistir aos esforços
provenientes de ondas e correntezas ao longo de sua vida útil de projeto.
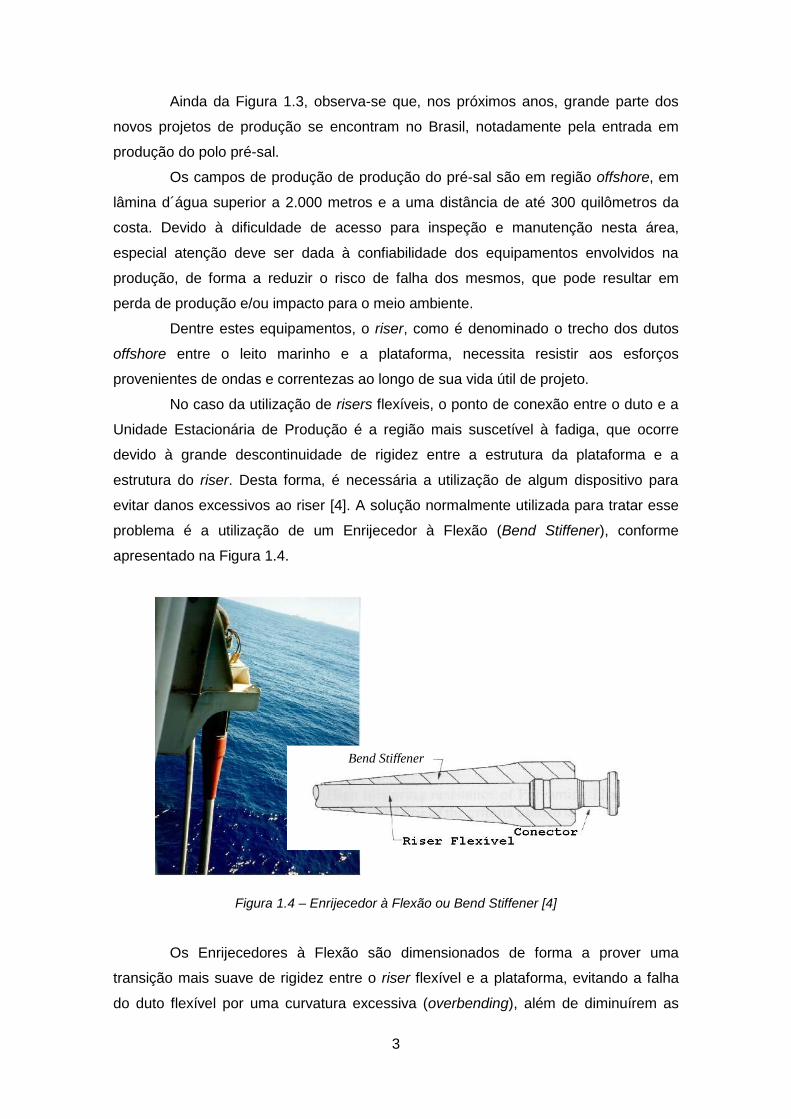
No caso da utilização de risers flexíveis, o ponto de conexão entre o duto e a
Unidade Estacionária de Produção é a região mais suscetível à fadiga, que ocorre
devido à grande descontinuidade de rigidez entre a estrutura da plataforma e a
estrutura do riser. Desta forma, é necessária a utilização de algum dispositivo para
evitar danos excessivos ao riser [4]. A solução normalmente utilizada para tratar esse
problema é a utilização de um Enrijecedor à Flexão (Bend Stiffener), conforme
apresentado na Figura 1.4.
Figura 1.4 – Enrijecedor à Flexão ou Bend Stiffener [4]
Os Enrijecedores à Flexão são dimensionados de forma a prover uma
transição mais suave de rigidez entre o riser flexível e a plataforma, evitando a falha
do duto flexível por uma curvatura excessiva (overbending), além de diminuírem as
Bend Stiffener

4
variações de curvatura para todas as condições de carregamento, aumentando a vida
à fadiga do riser flexível.
O material normalmente utilizado na fabricação desses componentes é o
elastômero de poliuretano. Por ser um material elastomérico, o seu comportamento
mecânico é complexo, apresentando resposta viscoelástica não-linear em uma ampla
faixa de deformação, podendo chegar a valores na ordem de 300% [5].
1.2. Revisão Bibliográfica
Conforme exposto anteriormente, o correto dimensionamento do Enrijecedor
à Flexão é essencial para garantir a integridade estrutural dos risers flexíveis. Por este
motivo diversos estudos já foram realizados visando o projeto e a integridade deste
equipamento.
Um dos trabalhos pioneiros de maior relevância foi realizado por BOEF e
OUT [6], em que o Enrijecedor à Flexão foi modelado por uma formulação de flexão
pura com grandes deslocamentos e pequenas deformações. A conclusão foi que,
apesar desta formulação ser válida para vigas esbeltas, os resultados obtidos a partir
desta formulação analítica apresentam boa concordância com modelos numéricos em
elementos finitos, validando assim esta metodologia para pré-projetos deste
componente.
DEMANZE et al. [7] estudaram a fadiga de Enrijecedores à Flexão pela
abordagem de propagação de trinca (mecânica da fratura). Através de ensaios com
corpos de prova possuindo trincas de diferentes comprimentos e solicitados em
diferentes razões de deformação (εmín/ εmáx), a vida à fadiga destes corpos de prova foi
estimada pelo fator de intensidade de deformações com excelente concordância. Com
o auxílio de modelo numérico em elementos finitos, foram identificadas as três regiões
críticas mais suscetíveis à falha por fadiga do poliuretano (Figura 1.5) e seus
respectivos valores esperados de deformação. Com o conhecimento de defeitos
típicos esperados de fabricação em cada uma destas regiões, foi possível avaliar a
vida à fadiga de Enrijecedores à Flexão.

5
Figura 1.5 – Regiões críticas de um Enrijecedor à Flexão
MENICONI e LOPES [8] avaliaram vida à fadiga de um Enrijecedor à Flexão,
em que de fato ocorreu este modo de falha, através da abordagem de predição de
vida para nucleação da trinca. Neste trabalho, ensaios mecânicos constataram o
comportamento viscoelástico do elastômero de poliuretano, assim como o
comportamento diferenciado em tração em compressão, típico de materiais
elastoméricos. Um corpo de prova foi elaborado considerando a geometria da região
de falha observada em campo (contato com o toróide), e em seguida foi levantada a
curva ε-N para esta configuração “geometria-material”, cujo esquema de ensaio
realizado pode ser observado na Figura 1.6. Com o auxílio de um modelo numérico
em elementos finitos, a deformação desta região de falha foi avaliada, e vida
correspondente fornecida pela curva ε-N foi condizente com o tempo de vida do
componente que sofreu falha.
Figura 1.6 – Ensaio de fadiga considerando região característica de falha (contato com o toróide). Ensaio (esquerda) e formato do corpo de prova (direita)
Contato com o toróide
Região de deformação máxima
Inserto metálico

6
LEMOS [4] desenvolveu uma metodologia para avaliar a fadiga de risers
flexíveis, identificando que a região crítica é o ponto de conexão entre o duto e a
Unidade Estacionária de Produção. Reconhecendo a importância do Enrijecedor à
Flexão para prover reforço estrutural nesta região, Lemos aprimorou o trabalho
realizado por BOEF e OUT [6], considerando equações constitutivas hiperelásticas
para o modelo, apresentando desta forma assimetria no comportamento em tração e
compressão. Em outro estudo, adiciona também o comportamento viscoelástico linear
ao modelo, permitindo prever a resposta do Enrijecedor à Flexão em função da taxa
de carregamento.
KIEPPER [9] estudou o comportamento do Enrijecedor à Flexão em um
software de simulação numérica pelo método dos elementos finitos (Abaqus),
comparando o comportamento previsto deste equipamento por diferentes hipóteses de
modelagem, contrapondo os resultados obtidos pelo modelo de flexão pura com
grandes deslocamentos com modelos em elementos finitos bidimensionais e
tridimensionais. Nos modelos numéricos, foram consideradas as suposições de
material elástico linear e de material hiperelástico para o corpo elastomérico do
Enrijecedor à Flexão.
Em sua dissertação de mestrado e na sua tese de doutorado, CAIRE [10, 11]
considerou a não linearidade e assimetria em compressão e tração do elastômero de
poliuretano. Além disto, foram realizados significativos avanços na caracterização do
comportamento viscoelástico dos Enrijecedores à Flexão, sobretudo em sua tese de
doutorado. Foi realizada formulação matemática do sistema duto flexível / Enrijecedor
a Flexão e o seu comportamento foi estudado no domínio do tempo e da frequência,
avaliando a influência da taxa de carregamento e do amortecimento viscoelástico na
resposta deste sistema mecânico.
SOUZA [12] desenvolveu um modelo linear elástico paramétrico de
Enrijecedor à Flexão para avaliação em condições de carregamentos extremos. O
objetivo do seu trabalho foi avaliar os parâmetros mais importantes para garantia de
distribuição de curvatura do riser flexível. Conclui-se que os parâmetros mais
importantes do Enrijecedor à Flexão são o seu diâmetro da base e o comprimento total
do cone polimérico.
LEITE [13] estudou o efeito de defeitos no Enrijecedor à Flexão em sua
capacidade máxima de carregamento. Para isto, foram realizados ensaios de tração
em corpos de prova apresentando diferentes níveis de defeitos, fornecendo curvas
tensão-deformação para o elastômero de poliuretano nesta condição. Esta relação

7
constitutiva considerando defeitos foram implementadas em modelos numéricos em
elementos finitos para avaliar a criticidade dos defeitos no Enrijecedor à Flexão.
1.3. Motivação de estudo
Da revisão bibliográfica, observa-se que muitos trabalhos se propuseram a
estudar o comportamento mecânico do Enrijecedor à Flexão, por vezes considerando
efeitos importantes como a relação não linear entre tensão e deformação e
viscoelasticidade do material.
Entretanto, embora as contribuições sejam válidas e relevantes para
dimensionamento de Enrijecedores à Flexão, as soluções obtidas se baseiam em
formulações generalizadas de comportamento viscoelástico não-linear, não
representando o estado da arte de modelagem de materiais elastoméricos. Ademais,
efeitos significativos observados no elastômero de poliuretano não foram estudados,
como a perda de rigidez e a presença de deformações residuais pelo efeito Mullins. O
aprimoramento do conhecimento do comportamento do elastômero de poliuretano
pode auxiliar na compreensão de falhas de Enrijecedores à Flexão que não foram
compreendidas pelo tratamento clássico utilizado para modelar este equipamento.
No presente trabalho, o estudo foi focado na compreensão do comportamento
mecânico do elastômero de poliuretano, deixando em segundo plano o
dimensionamento do Enrijecedor à flexão.
Desta forma, será apresentado a seguir um modelo visco-hiperelástico e de
Efeito Mullins para predição do estado de tensão e deformação do elastômero de
poliuretano sob carregamentos cíclicos em diferentes níveis de deformação e taxas de
carregamento.

8
2. Importância do Enrijecedor à Flexão em um campo de produção offshore
Conforme apresentado no capítulo introdutório deste trabalho, o Enrijecedor à
Flexão tem um papel fundamental na garantia da integridade dos risers flexíveis em
um campo de produção offshore. A seguir, será detalhada a função deste componente
em um típico campo de produção de petróleo, especialmente aqueles localizados em
território brasileiro, em que a utilização da tecnologia de risers flexíveis é
predominante.
2.1. A tecnologia riser
O riser, termo normalmente utilizado para denominar o trecho de duto
submarino suspenso e fixado em uma extremidade por uma Unidade Estacionária de
Produção (UEP), é essencial em um projeto de desenvolvimento de produção offshore
para permitir o transporte de petróleo dos poços submarino até a planta de produção
primária no convés de uma UEP.
Por estar suspenso, o riser está submetido a esforços dinâmicos advindos de
ventos, da correnteza marinha e do efeito das ondas, apresentando resposta
fortemente não linear, sofrendo grandes rotações e deslocamentos. A correnteza
marinha atua no riser de duas formas: aplicando diretamente uma força de arrasto no
duto e também alterando a posição da UEP de sua posição de equilíbrio (offset),
aplicando, desta forma, um deslocamento imposto no ponto de suportação do riser. A
ação dos ventos atua de forma semelhante ao segundo efeito apresentado para a
correnteza, deslocando a UEP e, portanto, o ponto de suportação do riser. Por último,
as ondas alteram a condição de equilíbrio “empuxo-peso” da UEP e, portanto,
impondo rotações e deslocamentos ao ponto de conexão do riser. A Figura 2.1 mostra
um desenho esquemático dos esforços atuantes em um riser.
A configuração mais usual dos risers é em catenária livre, na qual o duto é
fixado à UEP e simplesmente apoiado sobre o solo marinho, conforme ilustrado na
Figura 2.1. Esta configuração pode se tornar inviável com o aumento da lâmina
d´água, pois aumenta o trecho suspenso de duto, elevando as cargas de suportação
do riser, e também aumentando o risco de compressão dinâmica na região de contato
do riser com o solo marinho, podendo levar o duto a uma condição de flambagem.

9
Figura 2.1 – Esforços dinâmicos típicos em um riser
Caso a configuração básica do riser em catenária livre não seja compatível
com as solicitações previstas, existem diversas alternativas que viabilizam a
interligação de um duto submarino a uma UEP. Dentre estas, a mais utilizada é a
configuração Lazy-Wave (Figura 2.2), na qual flutuadores são instalados em uma
região intermediária do riser, reduzindo o peso suportado pela conexão na UEP e
minimizando o efeito de compressão dinâmica na região de contato com o solo
marinho.
Figura 2.2 – Configuração Lazy-Wave de um riser
Offset
Rotação devido
às ondas
Vento
Correnteza
Flutuadores
10
A tecnologia mais usual empregada em risers é a tecnologia de duto flexível,
tecnologia esta que requer a utilização de Enrijecedor a Flexão para prover uma
transição de rigidez entre o duto e a plataforma.
O desenvolvimento da tecnologia do duto flexível foi iniciado em 1958 pelo
Instituto Francês do Petróleo, e sua primeira instalação em um campo de produção
offshore ocorreu no ano de 1973 no Congo, porém aplicado apenas como duto
submarino. A primeira aplicação desta tecnologia como riser ocorreu no Brasil no ano
de 1978, no campo de Enchova [14].
Entretanto, é importante ressaltar que a tecnologia de riser flexível não é a
única disponível para realizar a interligação entre um duto submarino e uma UEP.
Mais recentemente, foi desenvolvida a tecnologia de risers rígidos em catenária
(comumente denominados de SCR, do inglês Steel Catenary Riser), em que o duto é
produzido a partir de juntas tubulares, semelhante aos dutos terrestres, soldadas em
terra ou no campo durante a instalação do riser. As primeiras instalações de SCRs
ocorreram em plataformas fixas, não estando sujeitas às ações de ondas e ventos no
ano de 1991. No ano de 1998, ocorreu a instalação pioneira de um SCR em uma
unidade flutuante, P-18, no Brasil.
Atualmente, as duas tecnologias de riser, rígido ou flexível, possuem seus
nichos de aplicação. A tecnologia de SCR apresenta a vantagem de permitir dutos de
maiores diâmetros internos e ser menos suscetível a efeitos corrosivos por
contaminantes do fluido de produção, como por exemplo, CO2 e H2S. Já a tecnologia
de riser flexível apresenta a vantagem de ser menos suscetível a danos pelos
movimentos impostos pela UEP e ser mais facilmente manuseado, podendo ser
armazenado em bobinas e remanejado em campo.
Existem também tecnologias híbridas, na qual o riser é composto por trechos
rígidos e flexíveis, combinando as vantagens de cada tecnologia e reduzido o efeito de
suas deficiências associadas.
Como o estudo será focado no comportamento de elastômero de poliuretano
para aplicação em Enrijecedores à Flexão, a aplicação do trabalho a seguir é, a priori,
para risers flexíveis.
2.1.1. Estrutura típica de um riser flexível
O duto flexível é uma estrutura compósita formada por diversas camadas
metálicas e poliméricas, dispostas de tal forma a permitir grandes deflexões no duto
sem que haja significativos acréscimos de tensão em sua estrutura [15]. A

11
configuração típica de um duto flexível está apresentada na Figura 2.3, sendo que
cada camada possui uma função específica.
A capa externa (1) é responsável por prover a estanqueidade externa do duto,
enquanto que a camada de pressão (7) garante a estanqueidade aos fluidos internos
ao duto.
A carcaça (8), formada por um perfil metálico intertravado, garante a
resistência ao colapso hidrostático, enquanto que a armadura de pressão (6), também
formada por um perfil metálico intertravado, fornece resistência à pressão interna do
duto.
Formadas por diversos perfis metálicos dispostos de forma helicoidal, as
armaduras de tração (2 e 4) são responsáveis pela resistência axial do duto. As duas
camadas são dispostas em sentidos opostos para balancear o efeito de torção quando
o duto é submetido a um esforço trativo.
Por último, para evitar o atrito entre as camadas metálicas do duto flexível,
camadas antiabrasivas (3 e 5) são dispostas nas regiões em que ocorre este tipo de
contato.
Figura 2.3 – Camadas típicas de um riser flexível
Como todas as camadas metálicas do duto flexível são formadas por perfis,
observa-se que, em caso de deflexão, um movimento relativo ocorre entre estes e,
desconsiderando efeitos de atrito, estas camadas não oferecem nenhuma rigidez à
flexão do duto. Portanto, a rigidez à flexão do duto flexível é governada pelas camadas
poliméricas (1 e 7), justificando a grande capacidade de deflexão desta tecnologia de
dutos.
1 2 4
6
7
8
3 5
1. Capa externa
2. Armadura de tração externa
3. Camada antiabrasiva
4. Armadura de tração interna
5. Camada antiabrasiva
6. Armadura de Pressão
7. Camada de pressão
8. Carcaça

12
2.1.2. Acessórios do riser flexível
De acordo com a estrutura apresentada na Figura 2.3, o corpo tubular do riser
flexível não permite uma conexão com estruturas adjacentes ao duto. Para realizar a
interligação do riser com o ponto de conexão na plataforma, é necessária a utilização
de conector de extremidade (Figura 2.4), dispositivo este que possui um flange,
elemento de interface padrão em sistemas industriais.
Figura 2.4 – Conector de extremidade
O corpo tubular do riser é ancorado no conector de extremidade por meio de
suas armaduras de tração, que são rearranjados no interior do conector e fixados por
meio de uma resina epóxi [16].
Outro acessório bastante importante para o riser flexível, e foco de estudo
deste trabalho, é o Enrijecedor à Flexão, responsável por prover uma transição entre a
relativa baixa rigidez do corpo tubular do riser com a estrutura da plataforma. A Figura
2.5 mostra uma foto de um Enrijecedor à Flexão no navio de lançamento do duto.
Figura 2.5 – Foto de Enrijecedor à Flexão

13
Com o aumento de rigidez local pelo Enrijecedor a Flexão, as curvaturas
impostas ao riser na sua região de conexão são amenizadas, reduzindo as tensões
nas camadas metálicas do riser flexível, elevando a vida à fadiga do duto [4].
Além de aumentar a vida à fadiga do duto, uma curvatura excessiva do riser
pode causar o destravamento das camadas intertravadas (armadura de pressão e
carcaça), causando uma falha no riser por sobrecarga.
2.1.3. Sistemas de suportação de risers flexíveis e sua influência no projeto do Enrijecedor à Flexão
Nas primeiras Unidades Estacionárias de Produção (UEP), o conector de
extremidade era diretamente suportado por uma estrutura bipartida no convés principal
da embarcação. O Enrijecedor à Flexão era moldado na parte inferior do conector,
conforme mostrado no desenho esquemático da Figura 2.6.
Figura 2.6 – Suporte Castelo de riser flexível – vista lateral e detalhe de fixação
Este método de suportação de riser flexível é denominado Suporte Castelo.
Uma foto real deste sistema está mostrada na Figura 1.4. A maior desvantagem deste
sistema era o tempo necessário para realizar a fixação do riser no suporte, sendo
necessário o fechamento do bipartido e sua fixação com estojos.
Esta dificuldade de fixação ficou mais crítica quando, para aumentar a
quantidade de risers interligados a uma UEP, foi identificada a necessidade de
suportar os dutos em uma região abaixo do nível do mar para melhorar a estabilidade
da unidade flutuante, dificultando ainda mais o posicionamento do bipartido e seus
estojos de fixação. Para solucionar este problema, foi desenvolvido o conceito de
Suporte Cônico, no qual o conector de extremidade era suportado por uma estrutura
metálica cônica, possuindo uma abertura frontal para entrada do riser no suporte. A

14
grande vantagem deste sistema é que o próprio peso do riser garante a sua
suportação, não sendo necessária a fixação de um bipartido ou outros acessórios.
A Figura 2.7 mostra um desenho esquemático deste método de suportação.
Notar que, neste caso, o Enrijecedor à Flexão também era moldado na parte inferior
do conector de extremidade.
Figura 2.7 – Suporte Cônico de riser flexível – vista em corte e detalhe de fixação
Apesar do Suporte Cônico trazer a vantagem de melhorar a estabilidade da
UEP, esta nova solução de suporte de riser trouxe uma dificuldade adicional ao ser
necessário realizar o acoplamento final do flange do conector de extremidade com as
tubulações fixas da UEP por meio de mergulho. Para solucionar esta dificuldade de
instalação, foi desenvolvido o sistema de suportação por Boca de Sino e Hang-off, que
de certa forma é uma solução híbrida do Suporte Castelo com o Suporte Cônico.
Neste sistema de suportação, o Enrijecedor à Flexão é mecanicamente
travado na Boca de Sino durante a instalação do riser. Este equipamento está
localizado em uma posição abaixo do nível do mar, semelhante à solução do Suporte
Cônico, possuindo, portanto, o mesmo efeito de estabilização da unidade flutuante.
Após o travamento do Enrijecedor à Flexão, cabos fusíveis que unem este
componente ao conector de extremidade são rompidos e o riser continua a ser puxado
por dentro do I-Tube (estrutura metálica instalada no costado de da UEP), sendo
levado até o convés principal da plataforma.
O travamento do Enrijecedor à Flexão na Boca de Sino estabiliza os
movimentos transversais e rotacionais do riser. Desta forma, quando o conector de
extremidade chega ao convés principal da UEP, sua situação dinâmica já está
suficientemente estável para que seja realizada a suportação do duto por meio de um
bipartido metálico (Hang-off), semelhante ao método de Suporte Castelo. A Figura 2.8
mostra um esquema de suportação de Enrijecedor à Flexão por Boca de Sino,
apresentando tanto a situação do riser instalado (imagem à esquerda), quanto a

15
situação de instalação momentos antes do travamento do Enrijecedor à Flexão na
Boca de Sino (imagem à direita).
Figura 2.8 – Sistema de Boca de Sino para suportação de riser flexível
Em análises de falha de risers ocorridas na região de conexão com UEPs,
observou-se uma maior taxa de falha quando o conector de extremidade opera em
conjunto com o Enrijecedor à Flexão [16]. Desta forma, por apresentar
desacoplamento entre estes dois acessórios do riser, o sistema de Bocas de Sino é a
solução atual de suportação de risers para novos projetos.
2.2. Dimensionamento de um Enrijecedor à Flexão
Usualmente, o projeto de um Enrijecedor à Flexão é realizado com base nos
critérios apresentados na norma API 17L1 [17], onde é definido que este equipamento
deve ser dimensionando de acordo com a tração dinâmica efetiva no duto, avaliada
em uma região próxima ao Enrijecedor à Flexão (T), associada à variação de ângulo
entre a direção longitudinal do duto com a condição neutra do Enrijecedor à Flexão
(θd) (Figura 2.9). Uma simplificação normalmente utilizada é a consideração de
engaste no suporte da UEP, podendo ser aplicada a todos os métodos de suportação
apresentados no capítulo 2.1.3.
Boca de Sino
I-Tube
Hang-off
Cabo de puxada (pull-in)
Cabos fusíveis
Cabeça de tração

16
Figura 2.9 – Esforços atuantes em um Enrijecedor à Flexão
As variações do ângulo “θd” ocorrem principalmente devido aos efeitos de
ondas e correnteza. O ângulo “θs” indica a posição inicial do Enrijecedor à Flexão em
relação à vertical, que devido a possíveis erros de instalação, pode ser diferente do
ângulo de projeto do suporte em até 2° [18]. Estes erros de instalação aplicam uma
deflexão estática não nula ao Enrijecedor à Flexão em uma condição em que o duto
estaria, teoricamente, em uma posição neutra de carregamento externo.
As solicitações apresentadas na Figura 2.9 devem ser avaliadas tanto em
cargas extremas quanto para fadiga [10]. Uma condição extrema pode causar uma
curvatura excessiva no duto flexível, tendo como consequência o destravamento de
suas camadas metálicas intertravadas e consequente perda de suas funções. Os
carregamentos de fadiga afetam principalmente as armaduras de tração do duto
flexível [4], assim como o próprio material constituinte do Enrijecedor à Flexão, foco do
presente trabalho.
A obtenção do carregamento (T, θd) é obtida a partir de uma análise global,
simulação numérica na qual é avaliado o comportamento geral do riser. O método
mais comum para realizar este estudo é a realização de uma análise dinâmica
utilizando o método dos elementos finitos, sendo o duto modelado por elementos de
viga submetidos às solicitações de correnteza, offset da UEP (causados pelo efeito de
ventos e ondas) e rotações e deslocamentos prescritos no ponto de conexão do riser
com a UEP (devido à alteração da condição de equilíbrio “empuxo-peso” da UEP pelo
efeito de ondas) [11].
Θs
Θd T
17
Desta forma, o modelo numérico do riser é bastante semelhante ao esquema
apresentado na Figura 2.1. Em uma primeira análise, o suporte do riser é considerado
com uma condição rotulada, de forma a se obter uma condição de carregamento (T,
θd) conservadora [4].
Com conhecimento dos carregamentos na região de suporte do riser, o
Enrijecedor à Flexão pode ser pré-dimensionado utilizando formulações de viga
esbelta, que apesar de a teoria não ser aplicável ao caso de Enrijecedores à Flexão,
os resultados são bastante satisfatórios para a obtenção de uma geometria inicial
deste equipamento [6]. O projeto final do Enrijecedor à Flexão pode ser refinado
utilizando o método dos elementos finitos, permitindo análise detalhada de pontos de
concentração de tensão deste equipamento, como por exemplo, as regiões de contato
elastômero – metal [4] ou a avaliação de defeitos de fabricação do elastômero [13].
Com o conhecimento da geometria do Enrijecedor à Flexão, o modelo global
do riser pode ser modificando, alterando a condição de suporte rotulado para condição
engastada, adicionando a rigidez do Enrijecedor à Flexão nos elementos
correspondentes. Desta forma, será obtida uma nova condição de carregamento (T,
θd) mais realista, que pode ser utilizada para reavaliar o dimensionamento do
Enrijecedor à Flexão de acordo com o modelo apresentado na Figura 2.9. Um
processo iterativo pode ser estabelecido entre a análise global do riser e a análise
local do Enrijecedor à Flexão até que se tenha um dimensionamento adequado deste
equipamento [10].
Usualmente, o modelo constitutivo utilizado para dimensionar o Enrijecedor à
Flexão é de material elástico-linear, e nos poucos casos em que se utiliza uma
formulação mais aprimorada, é considerada uma formulação constitutiva hiperelástica.
Fenômenos importantes como a viscoelasticidade e a presença de efeito Mullins do
elastômero de poliuretano raramente são considerados no projeto de um Enrijecedor à
Flexão.
De maneira geral, esta simplificação fornece bons resultados para o objetivo
fim do Enrijecedor à Flexão, isto é, proteger o corpo tubular do riser flexível em sua
região de conexão com a UEP. Entretanto, ao analisar o projeto do Enrijecedor à
Flexão propriamente dito, fenômenos viscoelásticos e o efeito Mullins, que causa
perda de rigidez e deformações residuais no material, podem ser parâmetros
importantes para dimensionar detalhes construtivos deste equipamento. Desta forma,
a não modelagem destes comportamentos significativos do elastômero de poliuretano
pode ser a causa da não compreensão de determinadas falhas de Enrijecedores à
Flexão na indústria offshore.

18
3. Comportamento mecânico de materiais elastoméricos
Para realizar um estudo detalhado do comportamento mecânico do
elastômero de poliuretano é necessário primeiramente compreender conceitos e
modelos matemáticos que descrevem o comportamento de materiais elastoméricos.
Primeiramente, será avaliado o comportamento qualitativo deste tipo de
material, como por exemplo, a influência de sua microestrutura na sua capacidade de
sofrer grandes deformações elásticas sem significativo acréscimo de tensão, além das
características específicas do elastômero de poliuretano.
Em seguida, serão avaliados os modelos matemáticos disponíveis na
literatura que permitem quantificar o comportamento do elastômero de poliuretano. As
equações constitutivas hiperelásticas estabelecem uma relação entre a tensão e a
deformação em elastômeros em uma situação de equilíbrio, enquanto que os modelos
viscoelásticos interpretam os efeitos dissipativos internos do material e estabelecem
uma formulação que tornam a resposta mecânica do material dependente da taxa de
carregamento.
Outro fenômeno característico de alguns materiais elastoméricos que altera
significativamente a sua resposta mecânica é o efeito Mullins, caracterizado por uma
perda de rigidez transitória inicial da curva tensão deformação e o surgimento de
deformações residuais.
3.1. Conceitos básicos de polímeros e comportamento de elastômeros
Antes de compreender os conceitos dos materiais elastoméricos, é
necessário entender como são constituídos os polímeros, classificação de material a
qual pertence os elastômeros.
A origem do termo polímero vem do grego, na qual várias (poli) unidades de
repetição, denominadas meros, são ligadas por ligação covalente, criando-se então o
termo polímero para identificar este tipo de material [19]. A Figura 3.1 mostra a reação
de polimerização do polietileno, polímero quimicamente mais simples, onde várias
moléculas de etileno (monômero) reagem para formar o polietileno (polímero).

19
Monômero (etileno) Mero
H H H H H H H H H H H H H H H H
| | | | | | | | | | | | | | | |
C=C C=C C=C C=C CCCCCCCC Polímero
| | | | | | | | | | | | | | | | (polietileno)
H H H H H H H H H H H H H H H H
Figura 3.1 – Reação de polimerização do polietileno [4]
Como os polímeros são formados por uma quantidade de átomos
encadeados facilmente superando uma centena e podendo alcançar valores ilimitados,
as propriedades destas moléculas adquirem características próprias, na qual a
interação entre as cadeias poliméricas possui maior influência do que a natureza
química dos átomos que a compõe [20]. Por esta razão, a depender da interação entre
as cadeias poliméricas, o material obtido pode ser classificado em três classes:
plásticos, elastômeros e fibras [19].
Os plásticos são os polímeros mais usuais em nosso cotidiano, e por esta
razão o termo plástico é tão difundido no senso comum, sendo frequentemente
utilizado incorretamente como sinônimo de polímero. Os plásticos são caracterizados
por possuírem comportamento sólido com elevada rigidez em sua temperatura de
utilização, sendo o polietileno um exemplo. Um polímero é classificado como fibra
quando suas cadeias poliméricas são orientadas em um sentido principal, aumentando
a resistência mecânica nesta direção [19]. Um exemplo comum deste tipo de material
são as fibras de carbono.
Para que um polímero seja classificado como um elastômero, este deve
possuir a capacidade de se deformar, em temperatura ambiente, em pelo menos duas
vezes em relação ao seu comprimento original, tendo recuperação rápida (baixo
amortecimento) e sem distorção permanente significativa após a retirada da carga
[19]. Como não apresentam deformações plásticas significativas mesmo em grandes
estiramentos, os elastômeros possuem a característica de apresentarem fratura frágil.
O primeiro elastômero a ser desenvolvido para uso comercial foi a borracha
natural. Inicialmente, este polímero não apresentava muita utilização prática, pois em
seu estado natural se comporta como um fluido com elevada viscosidade (sua forma
original não é reestabelecida depois de retirado um carregamento). O seu uso ficou
mais extensivo quando no ano de 1839 Charles Goodyear descobriu o processo de
vulcanização, na qual é obtida a capacidade deste material em ser submetido a
elevadas deformações elásticas, característica fundamental dos elastômeros [19].

20
No processo de vulcanização, enxofre é adicionado criando ligações cruzadas
entre as cadeias poliméricas, gerando assim uma estrutura molecular reticulada,
evitando o deslizamento relativo permanente entre as cadeias poliméricas. Com a
vulcanização, o deslizamento relativo entre as cadeias poliméricas ainda pode ocorrer,
entretanto, após cessado o carregamento, o material retorna à sua forma original
devido à presença das ligações cruzadas causadas. O efeito da vulcanização pode ser
visualizado na Figura 3.2.
Figura 3.2 – Vulcanização da borracha natural [21]
3.1.1. Elastômero de poliuretano
O desenvolvimento do elastômero de poliuretano se iniciou no ano de 1937,
quando o professor Otto Bayer (Leverkusen, Alemanha) estudou a química deste
polímero, sendo inicialmente aplicado para obtenção de espumas. Pouco depois, no
ano de 1940 e também na Alemanha, foi constatado que este material poderia ser
utilizado para obtenção de um elastômero sintético, mas ainda com propriedades
mecânicas inadequadas para muitas aplicações.
Borracha não vulcanizada
Borracha vulcanizada
Ligações cruzadas

21
Com a escassez de recursos durante a Segunda Guerra Mundial, os alemães
concentraram esforços no desenvolvimento de um elastômero de poliuretano que
substituísse a borracha natural. No ano de 1950, foi obtida uma formulação em que o
objetivo do estudo foi alcançado, obtendo um material com propriedades mecânicas
superiores em relação à borracha natural, combinando a elasticidade da borracha com
características mecânicas aprimoradas, como elevada tensão de ruptura e maior
resistência à fadiga. Com o sucesso da obtenção de um elastômero de poliuretano, o
desenvolvimento deste material foi avançando ao longo dos anos, sendo que na
década de 1970 já era amplamente produzido pelas grandes indústrias químicas.
Para obtenção de um elastômero de poliuretano com boas propriedades
mecânicas, é necessária a reação de três constituintes [5]:
Diisocianato (aromático ou alifático);
Diol (poliéter ou poliéster) de cadeia longa, com alto peso molecular;
Diol de cadeia curta, com baixo peso molecular, atuando como
extensor de cadeia.
Com a reação de poliadição destes três componentes, é formado um
copolímero em bloco, no qual o diol de cadeia longa, denominado segmento flexível, é
unido a segmentos formados pelo diisocianato com extensores de cadeia (diol de
cadeia curta), denominado segmento rígido [5]. O nome poliuretano é dado pelo grupo
uretano formado na união de cada um dos três constituintes, conforme apresentado na
Figura 3.3.
Figura 3.3 – Estrutura de repetição do elastômero de poliuretano
Segmento rígido (diisocianato)
Segmento flexível (diol de cadeia longa)
Grupo Uretano
Extensor de cadeia (diol de cadeia curta)
H |
NCO || O

22
Os segmentos flexíveis possuem este comportamento por possuírem uma
temperatura de transição vítrea entre -60°C e -40°C [21]. A transição vítrea (Tg) define
a temperatura mínima em que uma cadeia polimérica amorfa adquire mobilidade,
podendo alterar a sua conformação. Desta forma, como a temperatura de aplicação do
elastômero de poliuretano é superior a “Tg” deste segmento, esta região do material
possui mobilidade suficiente para que a cadeia polimérica seja estendida.
Já os segmentos rígidos, formados pelo diisocianato e pelo diol de cadeia
curta, possuem este comportamento rígido por apresentarem elevadas forças
secundárias (ligação de hidrogênio) entre as cadeias poliméricas, apresentando
estrutura cristalina na temperatura de aplicação.
Se analisarmos uma microestrutura da borracha natural, tal qual apresentada
na Figura 3.2, o comportamento elastomérico é obtido pelas ligações covalentes entre
cadeias poliméricas criadas pelo processo de vulcanização. Portanto, a estrutura
elastomérica é obtida por ligações químicas.
No caso do elastômero de poliuretano, não há necessariamente ligações
químicas cruzadas entre as cadeias poliméricas, sendo o comportamento elastomérico
obtido de forma diferente. Os monômeros que criam os segmentos rígidos e flexíveis
são dissimilares, gerando uma segregação microestrutural entre estas fases. Desta
forma, segmentos rígidos se aglutinam e criam núcleos de material cristalino, atuando
como pontos físicos de ligação entre os domínios flexíveis (Figura 3.4).
É interessante observar que o comportamento do elastômero é obtido por um
arranjo de moléculas em escala nanométrica. Portanto, este material pode ser
considerado um nanomaterial, apesar do termo ainda não estar em voga quando este
material foi desenvolvido [21].
Figura 3.4 – Estrutura de elastômero de poliuretano

23
No caso da borracha natural, não é possível processar o elastômero depois
de realizada a vulcanização, pois mesmo se for elevada a temperatura deste material,
as ligações cruzadas não permitirão o deslizamento relativo entre as cadeias
poliméricas, e quando a temperatura atingir determinado limite, ocorrerá a quebra das
cadeias poliméricas (termorrígido). Do ponto de vista macroscópico, a borracha irá
queimar sem que seja observado um estado em que seria possível alterar a forma do
material.
No caso do elastômero de poliuretano, as ligações entre os domínios flexíveis
são formadas pelos domínios de estrutura cristalina. Dependendo de sua formulação
química, a temperatura de fusão (Tm) dos cristalitos é de aproximadamente 190°C [21],
neste caso, o elastômero de poliuretano é denominado poliuretano termoplástico, pois
se a temperatura de fusão for superada, as cadeias poliméricas adquirem energia
suficiente para que os cristalitos sejam fundidos, e os antes denominados “segmentos
rígidos” se rearranjem em uma estrutura amorfa.
Portanto, se o poliuretano termoplástico for aquecido a uma temperatura
superior a “Tm” de seus cristalitos, toda a sua estrutura será formada por cadeias
poliméricas de estrutura amorfa e o material possuirá o comportamento macroscópico
de um fluido viscoso. Se a temperatura for reduzida para um valor inferior a “Tm”, os
cristalitos serão novamente formados e o material voltará a apresentar comportamento
elastomérico com estrutura conforme apresentada na Figura 3.4.
Este comportamento é característico dos polímeros termoplásticos. Desta
forma, o poliuretano termoplástico possui a capacidade de se fundir em temperaturas
elevadas, podendo ser moldado na geometria requerida de utilização sem que haja
degradação das cadeias poliméricas [21]. A Figura 3.5 mostra uma comparação do
processamento da borracha natural com o processamento do poliuretano
termoplástico:
Figura 3.5 – Comparação do processamento de borracha natural e poliuretano termoplástico
Matéria prima
Moldagem
Produto
Vulcanização Calor
Degradação do elastômero
Borracha natural
Matéria prima
Produto Poliuretano
Termoplástico
Poliuretano Termoplástico
Calor

24
Conforme mencionado anteriormente, a faixa de temperatura de utilização do
poliuretano termoplástico se encontra entre a temperatura de transição vítrea (Tg) do
domínio flexível e a temperatura de fusão (Tm) do domínio rígido. Em uma temperatura
inferior a esta faixa, o material irá se comportar de maneira rígida e frágil, e em uma
temperatura superior, ocorrerá a fusão dos domínios cristalinos e o material se
comportará como um fluido viscoso. A Figura 3.6 mostra um gráfico do módulo de
elasticidade do poliuretano termoplástico em função da temperatura
Figura 3.6 – Comportamento do poliuretano termoplástico em função da temperatura [21]
Embora teoricamente seja possível desfazer os domínios cristalinos do
elastômero de poliuretano, a depender de sua formulação química, a temperatura de
fusão (Tm) do domínio rígido pode ser elevada de tal forma que seja superior à
temperatura de degradação dos grupos uretanos [22]. Nestes casos, o elastômero de
poliuretano não pode ser fundido e possui comportamento termorrígido.
Pode ser observado na Figura 3.6 que a rigidez do elastômero de poliuretano
é maior quando é aumentada a proporção da região cristalina em sua microestrutura.
Isto é obtido alterando a estequiometria dos três constituintes, aumentando a
proporção de matéria prima do segmento rígido. O acréscimo de proporção de região
cristalina majora não somente o módulo de elasticidade, mas também amplia sua
temperatura limite de utilização, sua tensão de ruptura e a sua dureza [22].
Embora a Figura 3.6 seja válida para poliuretano termoplástico, este
comportamento pode ser estendido para qualquer elastômero de poliuretano. A única
diferença é que, no caso de um elastômero de poliuretano termorrígido, a condição de
fluido viscoso não pode ser atingida.
1
3
5
7
9
11
-200 -150 -100 -50 0 50 100 150 200 250 300
log[
E (P
a)
Temperatura (°C)
Tg domínio flexívelTm cristais
Região elastomérica
Rígidoe frágil
Fluidoviscoso
Aumento dodomínio cristalino

25
Por ser um material com resposta não linear e altamente dependente da taxa
de carregamento, a especificação utilizada para selecionar a composição do
elastômero de poliuretano dificilmente é determinada por uma propriedade diretamente
relacionada com a aplicação, como por exemplo, o módulo de elasticidade ou a tensão
de ruptura, critérios comumente utilizados para seleção de materiais metálicos.
Devido a esta dificuldade de obtenção de um parâmetro que caracterize o
comportamento de determinada composição de um elastômero de poliuretano, a
dureza superficial do material é usualmente utilizada como indicação indireta de seu
desempenho mecânico, sendo classificado na escala Shore, escala esta apropriada
para classificação de materiais elastoméricos [23].
Variando a estequiometria dos constituintes do elastômero de poliuretano, é
possível obter materiais com dureza entre Shore 55 A, dureza característica de
elastômeros de rigidez mediana, até durezas elevadas na ordem de Shore 80 D,
dureza esta que já seria característica de plásticos. [22].
O elastômero de poliuretano é considerado um polímero único, preenchendo
uma lacuna de polímeros com comportamento entre elastômeros e plásticos [5],
podendo alcançar tensões de ruptura de 25 a 75 MPa, a depender de sua composição
[22].
A aplicação de um elastômero de poliuretano de elevada dureza é excelente
para o caso de Enrijecedores à Flexão, pois se busca um material de elevada
capacidade de sofrer deformações devido às variações do ângulo θd entre o riser e o
suporte (Figura 2.9), ao mesmo tempo possuindo um elevado módulo de elasticidade
para prover uma transição suave de rigidez entre o riser e o suporte na Unidade
Estacionária de Produção. A faixa usual de especificação de dureza do elastômero de
poliuretano para esta aplicação varia de Shore 85 A a Shore 60 D, a depender do
projeto estrutural do riser.
A Figura 3.7 mostra uma comparação entre escalas de dureza Shore A e
Shore D. Para melhor compreensão desta escala, também estão apresentados valores
característicos de materiais comumente presentes em nosso cotidiano [24, 25].

26
Figura 3.7 – Escala de dureza Shore – Faixas de dureza de aplicação do elastômero de
poliuretano
3.2. Equações constitutivas hiperelásticas
Muitos fatores fazem com que o dimensionamento de componentes
elastoméricos seja mais complexo em relação ao dimensionamento de componentes
metálicos, notadamente pela sua relação constitutiva, ou seja, a relação entre tensão
deformação [26].
No caso dos materiais metálicos, a estrutura cristalina com elevado grau de
organização impede extensões maiores do que um pequeno percentual do seu
comprimento original sem que ocorra deformação plástica no material [27]. No caso
dos materiais elastoméricos, as longas cadeias poliméricas são formadas
majoritariamente por ligações covalentes cabano-carbono, com característica de união
em ângulo de 109,5° com capacidade de rotação em torno do seu eixo de ligação,
permitindo que as cadeias a adquirirem diferentes conformações [26].
Como uma cadeia polimérica pode ser constituída de até 100.000 ligações
carbono-carbono, é bastante coerente pressupor que, visto a infinidade de
conformações que estas podem assumir, a conformação estática das diversas cadeias
poliméricas que compõe um elastômero se assemelha a um novelo emaranhado.
Faixa usual de aplicação para enrijecedores à flexão
Faixa usual de dureza do elastômero de poliuretano
Shore OO 0 10 20 30 40 50 60 70 80 90 100
Shore D 0 10 20 30 40 50 60 70 80 90 100
Bala
de g
om
a
Mo
use p
ad
Elá
stic
o d
e
din
heiro
Borra
cha d
e L
ápis
Pneu
Sola
de s
apato
Roda d
e c
arrin
ho
de s
uperm
erc
ado
Bola
de g
olfe
Capacete
de
pro
teção in
div
idual
Shore A 0 10 20 30 40 50 60 70 80 90 100
Cin
to d
e c
ouro
ELASTÔMEROS PLÁSTICOS
27
De forma simplificada, cada cadeia polimérica pode ser tratada como uma
mola. Se uma cadeia for estirada, a conformação da mesma será modificada e uma
força de reação irá agir de forma a retornar para a conformação estática, atingindo
uma condição de máxima entropia. Como as cadeias poliméricas dos elastômeros
possuem baixa polaridade, resultando em forças intermoleculares relativamente
fracas, se não houver nenhum tipo de travamento entre as cadeias, um escoamento
viscoso ocorre entre as mesmas, sendo o caso da borracha natural não vulcanizada.
Conforme mencionado anteriormente, o travamento das cadeias poliméricas é
realizado por ligações cruzadas, químicas ou físicas, permitindo o grande estiramento
e consequente alteração de conformação das cadeias poliméricas do elastômero,
explicando, desta forma, a elevada capacidade de sofrer deformações desta classe de
polímeros.
Para a obtenção de uma equação constitutiva hiperelástica, os seguintes
comportamentos elementares dos elastômeros precisam ser considerados [28]:
O material possui comportamento isotrópico.
O módulo volumétrico do material é bastante elevado, com valores
semelhantes ao dos metais, enquanto que seu módulo de
cisalhamento é bastante inferior, na ordem de 10-5 em relação aos
metais. Devido a esta discrepância de propriedades elásticas,
elastômeros são usualmente modelados com comportamento
incompressível.
A resposta do material é perfeitamente elástica, ou seja, considerando
que o elastômero é deformado em uma condição isotérmica, a tensão
é função apenas da deformação instantânea atuante no material,
independente do histórico ou da taxa de carregamento.
Com as três hipóteses elementares das equações constitutivas hiperelásticas
apresentadas acima, observa-se que esta modelagem não é suficiente para descrever
completamente o comportamento mecânico dos elastômeros. É conhecido que a
resposta do material é dependente da taxa de carregamento e que o comportamento
do material é diferente em carregamento e descarregamento, ocorrendo um ciclo
histerético na resposta “tensão-deformação”, realizando um trabalho líquido em um
ciclo de carregamento cuja energia é dissipada em forma de calor.

28
Portanto, as equações hiperelásticas apresentadas a seguir estabelecem a
resposta dos elastômeros em uma condição de equilíbrio. Embora o estabelecimento
destas equações seja fundamental, elas não são suficientes para o conhecimento
pleno do comportamento do elastômero de poliuretano.
Duas abordagens são utilizadas para obtenção de equações constitutivas
hiperelásticas. A primeira abordagem considera o comportamento do material no nível
molecular, em que o comportamento macroscópico do material é inferido utilizando
conceitos de termomecânica estatística. A outra abordagem utiliza o tratamento
clássico da mecânica do contínuo, no qual o comportamento do elastômero é definido
arbitrando uma função densidade de energia de deformação e aplicando restrições da
segunda lei da termodinâmica para obtenção da relação entre tensão e deformação.
3.2.1. Tratamento termodinâmico estatístico
Antes de realizar o tratamento estatístico para obtenção de um modelo
hiperelástico, é necessário apresentar o tratamento termodinâmico clássico para o
comportamento mecânico de elastômeros [27].
As equações apresentadas a seguir exprimem o comportamento
macroscópico do material e não são suficientes para a obtenção de equações
constitutivas, mas permitem a compreensão dos parâmetros físicos envolvidos na
deformação de materiais elastoméricos. Um exemplo de como obter um modelo
hiperelástico será apresentado no capítulo 3.2.1.1, onde conceitos de mecânica
estatística são aplicados em conjunto com as equações termodinâmicas para obter
uma relação entre tensão e deformação de elastômeros.
Recordando que, neste momento, o material é considerado perfeitamente
elástico, não há dissipação de energia e pode-se considerar a primeira lei da
termodinâmica como válida, onde a conservação de energia é estabelecida
relacionado a energia interna (U), o fluxo de calor (Q) e o trabalho realizado sobre o
material (W).
dWdQdU (3.1)
Como o material é considerado perfeitamente elástico, a resposta em
carregamento e em descarregamento deve ser idêntica, não havendo qualquer
diferenciação do material antes ou após um ciclo de solicitação. Interpretando este
comportamento do material pela termodinâmica, o processo de deformação do
elastômero pode ser descrito pela segunda lei da termodinâmica para processos

29
reversíveis, em que é relacionado o fluxo de calor com a temperatura (T) e a entropia
do material (S).
TdSdQ (3.2)
Cominado a primeira e a segunda lei da termodinâmica:
dWTdSdU (3.3)
O trabalho exercido sobre o elastômero pode ser considerado de duas
origens. A primeira parcela é oriunda da pressão externa ambiente (P) e a segunda
provém de uma força interna “f” associada a uma extensão “dL”. Notar que os sinais
dos termos a direita da equação (3.4) são opostos devido ao diferente sentido de
aplicação dos carregamentos de pressão e esforço interno.
fdLPdVdW (3.4)
Aplicando (3.4) em (3.3):
fdLPdVTdSdU (3.5)
Considerando que o processo de deformação ocorre em uma condição de
pressão ambiente constante, é aplicado o conceito de entalpia (H) ao problema:
PVUH (3.6)
Diferenciando a equação (3.6) em pressão constate e isolando o termo “dU”:
PdVdHdU (3.7)
Aplicando (3.7) em (3.5):
fdLTdSdH (3.8)

30
Diferenciando a equação (3.8) em relação à distensão linear e considerando
que o elastômero é deformado em uma condição de pressão e temperatura
constantes, obtém-se a força necessária para que o material se mantenha em uma
condição de equilíbrio:
PTPT L
ST
L
Hf
,,
(3.9)
A equação (3.9) apresenta a primeira constatação interessante sobre o
comportamento mecânico de materiais elastoméricos. Em materiais metálicos, quando
o seu limite de escoamento não é excedido, o esforço interno no material depende
apenas de variações de sua energia interna, ou seja, a derivada (∂S/∂L)T,P é nula.
No caso de materiais elastoméricos, o esforço interno surge não somente por
variações de sua energia interna, efeito incorporado na equação (3.9) no termo de
entalpia, mas também por variações de entropia do material.
Variações de entropia ocorrem devido ao estiramento das cadeias poliméricas
do elastômero. Extensões da cadeia reduzem a quantidade de conformações
possíveis que estas podem adquirir, reduzindo a entropia do material. Como todo
sistema termodinâmico tende a maximizar sua entropia, um esforço interno surge de
forma a restaurar uma conformação de maior desordem para a cadeia polimérica,
correspondendo ao seu estado não deformado.
Como efeitos de energia interna e de entropia interferem no comportamento
mecânico de elastômeros, para compreender melhor como o esforço interno deste
material depende da temperatura, é interessante obter uma expressão na forma
(∂f/∂T)P,L, ou seja, considerando uma determinada extensão “L” e em pressão externa
constante, qual seria a variação do esforço interno com a alteração da temperatura do
material.
Para obter este resultado, é necessário utilizar o conceito de variação da
energia livre de Gibbs em um sistema fechado, onde é avaliada a totalidade de
energia disponível de um sistema termodinâmico que pode ser convertido em trabalho
considerando processo em temperatura e pressão constantes:
fdLVdPSdTdG (3.10)

31
Sendo a energia livre de Gibbs um potencial termodinâmico, uma das
relações de Maxwell aplicadas à equação (3.10) determina que:
LPPT T
f
L
S
,,
(3.11)
Aplicando (3.11) em (3.9):
LPPT T
fT
L
Hf
,,
(3.12)
Reorganizando a equação (3.12), é obtida uma expressão que estabelece a
variação do esforço interno do elastômero quando a temperatura do material é
alterada sem que haja modificação da deformação aplicada ou da pressão
atmosférica.
T
LHf
T
f PT
LP
,
,
(3.13)
De acordo com a equação (3.13), quando ocorrer uma condição tal que
(∂H/∂L)T,P>f, o esforço interno reduz com o acréscimo da temperatura, ou seja, o
elastômero perde rigidez, sendo este comportamento correspondente ao observado
em materiais metálicos.
Por outro lado, se for obtida uma condição na qual (∂H/∂L)T,P<f, o esforço
interno aumenta com o acréscimo da temperatura, condição diferente da expectativa
mais provável do comportamento mecânico de materiais. Se o termo (∂H/∂L)T,P for
desconsiderado na equação (3.9), é obtida uma indicação da razão deste
comportamento anômalo dos elastômeros.
PTL
STf
,
(3.14)
A equação (3.14) descreve o comportamento mecânico de um elastômero
ideal, em que a variação de energia interna é desprezada e se supõe que a
32
deformação do elastômero é governada pela redução de entropia devido à extensão
da cadeia polimérica e diretamente proporcional à temperatura absoluta do material.
Evidentemente, em um elastômero real, o termo (∂H/∂L)T,P não pode ser
sumariamente desconsiderado como uma parcela importante para determinação do
seu comportamento mecânico. Esta aproximação é razoável quando a deformação
aplicada ao elastômero é suficientemente elevada tal que o efeito entrópico seja
superior ao efeito entálpico. Ainda assim, a desconsideração de um determinado efeito
é uma simplificação, e para uma modelagem completa, seria necessário sempre
considerar o efeito da entalpia.
A magnitude de deformação a partir da qual o comportamento mecânico é
governado pela entropia depende do elastômero analisado. Para a borracha natural,
este resultado é obtido para deformações superiores a 10% [27]. Em alguns
elastômeros, o efeito entálpico torna a ser significativo para deformações muito
elevadas, pois o elevado estiramento das cadeias poliméricas causa cristalização
induzida pela deformação.
Derivando a equação (3.6) em relação ao estiramento aplicado e
considerando processo isotérmico e adiabático, pode-se encontrar uma expressão na
qual serão obtidos parâmetros físicos mensuráveis que estão envolvidos no termo
(∂H/∂L)T,P da equação (3.13):
PTPTPT L
VP
L
U
L
H
,,,
(3.15)
Para compreender de forma diferenciada o efeito de distorção e o efeito da
dilatação volumétrica no material e considerando processo isotérmico, a energia
interna pode ser descrita da seguinte forma:
dVV
UdL
L
UdU
TLTV ,,
(3.16)
Derivando a equação (3.16) em relação ao estiramento e considerando
processo isobárico:
PTTLTVPT L
V
V
U
L
U
L
U
,,,,
(3.17)
33
Aplicando (3.17) em (3.15):
PTLTVTPT L
VP
V
U
L
U
L
H
,,,,
(3.18)
Da equação (3.18), observa-se que o termo (∂H/∂L)T,P pode ser reinterpretado
em duas parcelas de variação da energia interna com a deformação, uma a volume
constante e outra dependente da variação volumétrica do material.
Por ser um termo a volume constante (∂U/∂L)T,V pode ser relacionado com a
energia intramolecular do elastômero. Quanto ao termo (∂U/∂V)T,L, este não representa
nenhuma quantidade física mensurável. Para fornecer sentido físico a esta parcela, é
necessário utilizar o conceito de energia livre de Helmholtz (ψ), onde é mensurada a
parcela de energia de um sistema termodinâmico que pode ser convertida em trabalho
considerando temperatura constate:
fdLPdVSdTd (3.19)
Sendo a energia livre de Helmholtz um potencial termodinâmico, uma das
relações de Maxwell aplicadas à equação (3.19) determina que:
LVLT T
P
V
S
,,
(3.20)
Diferenciando a equação (3.5) em relação ao volume em temperatura e
estiramentos constantes:
PV
ST
V
U
LTLT
,,
(3.21)
Aplicando (3.20) em (3.21):
PT
PT
V
U
LVLT
,,
(3.22)

34
Aplicando a regra da cadeia de diferenciação no primeiro termo do lado direito
da equação (3.22):
LPLTLV T
V
V
P
T
P
,,,
(3.23)
O coeficiente cúbico de expansão térmica (α) e o coeficiente de
compressibilidade isotérmico (β) podem ser definidos como:
LPT
V
V ,
1
(3.24)
LTV
P
V ,
1
(3.25)
Aplicando (3.24) e (3.25) em (3.23):
LVT
P
,
(3.26)
Aplicando (3.26) em (3.22)
PTV
U
LT
,
(3.27)
Portanto, aplicando (3.27) em (3.18), obtém-se uma descrição de (∂H/∂L)T,P
em parâmetros físicos mensuráveis:
PTVTPT L
VT
L
U
L
H
,,,
(3.28)
Conforme descrito anteriormente, o termo (∂U/∂L)T,V pode ser relacionado
com a energia intramolecular do elastômero. O segundo termo a direita da equação
(3.28) depende da variação volumétrica do elastômero quando este é estirado.
Observando as premissas da obtenção de equações hiperelásticas para
descrição do comportamento mecânico de elastômeros, é bastante razoável

35
considerar que o material apresenta comportamento incompressível. Desta forma,
pode-se simplificar a equação (3.28) e o termo (∂U/∂L)T,V pode ser compreendido
como a própria parcela de energia intermolecular do elastômero:
VTPT L
U
L
H
,,
(3.29)
Todas as equações apresentadas neste capítulo são bastante benéficas para
compreender os parâmetros físicos envolvidos na deformação de materiais
elastoméricos. Entretanto, embora necessárias, estas não são suficientes para
estabelecer a relação entre a tensão e a deformação no material, ou seja, definir uma
equação constitutiva hiperelástica.
Para isto, serão apresentados a seguir exemplos de como aplicar conceitos
de mecânica estatística para descrever o estiramento das cadeias poliméricas do
elastômero de forma a obter informações da sua reorganização molecular, e por fim,
aplicando as restrições termodinâmicas, obter uma equação hiperelástica para
descrever o comportamento mecânico do material.
3.2.1.1. Modelo Neo Hookeano por termodinâmica estatística.
No capítulo anterior, foram apresentadas as restrições termodinâmicas que
um modelo mecânico deve respeitar para que represente corretamente o
comportamento de um elastômero. Um dos métodos possíveis de obtenção de um
modelo hiperelástico é atribuir um modelo matemático para descrever o
comportamento das cadeias poliméricas quando uma deformação é aplicada ao
elastômero.
Para isto, as cadeias poliméricas podem ser modeladas como estruturas
longas, flexíveis e com volume desprezível. Com esta hipótese simplificadora, contatos
físicos entre as cadeias não são relevantes e, para uma determinada distância
separando as extremidades de uma determinada cadeia polimérica, todos os arranjos
conformacionais são igualmente possíveis e se alternam continuamente por serem
condições isoenergéticas, conforme ilustrado na Figura 3.8. Como essas alterações de
conformação são causadas por agitação térmica, trata-se de um movimento
browniano.

36
Figura 3.8 – Desenho esquemático de conformações possíveis de cadeia polimérica, a
depender de sua distância entre extremidades
Evidentemente, a quantidade de arranjos conformacionais possíveis de uma
cadeia polimérica depende da distância entre suas extremidades. A condição
demonstrada na imagem mais à direita da Figura 3.8 poderia representar um estado
não deformado de uma cadeia polimérica, na qual existem elevadas possibilidades de
conformação para a cadeia.
Quando o elastômero sofre uma deformação, é razoável imaginar que a
distância entre extremidades da cadeia polimérica aumenta, podendo ser
representada pela imagem central da Figura 3.8. Com isto, a quantidade de
conformações possíveis para a cadeia polimérica é reduzida, o que é interpretado na
termodinâmica como uma redução de entropia, causando como reação um esforço
interno como tentativa de retornar a cadeia polimérica para sua distância original entre
extremidades, e desta forma, maximizar a entropia do sistema, conforme previsto
pelas equações anteriormente apresentadas.
Em uma condição hipotética extrema, considerando que não ocorra ruptura
no elastômero, uma cadeia polimérica pode ser totalmente estendida de forma que
seja alcançada a maior distância possível entre suas extremidades, sendo
representada pela imagem mais à esquerda da Figura 3.8. Neste estado, é evidente
notar que a única conformação possível para a cadeia é o alinhamento perfeito de
cada um de seus segmentos, correspondendo ao estado zero de entropia.
Com base nesta descrição idealizada de cadeia polimérica, para modelar todo
o domínio do elastômero, é considerada uma rede composta por infinitas cadeias
poliméricas, estando sujeita às seguintes hipóteses [27]:
1) A rede formada pelas diversas cadeias poliméricas é perfeita e
uniforme. A deformação individual de cada cadeia pode ser
considerada idêntica à deformação macroscópica aplicada ao
elastômero.
2) Todas as conformações de uma cadeia polimérica são isoenergéticas,
mesmo para diferentes distancias entre extremidades. Desta forma, é
L

37
considerado que a energia interna do elastômero é constante quando
este é deformado.
3) A quantidade total de possibilidades conformacionais do elastômero
corresponde ao produto da quantidade individual de conformações
possíveis de todas as cadeias poliméricas que compõe o elastômero.
Isto é, uma cadeia polimérica não interfere nas conformações
possíveis de outra cadeia adjacente.
Cada cadeia polimérica pode ser modelada composta por “n” segmentos com
comprimento “ ”. O ponto de conexão de cada um destes segmentos “ ” representam
as regiões da cadeia que são passíveis de sofrer rotações, permitindo assim
alterações na conformação da cadeia polimérica [27].
Se todos os segmentos forem estendidos, será obtida uma extensão de
comprimento “L” tal qual apresentado na imagem mais à esquerda da Figura 3.8 e
representado matematicamente pela equação (3.30):
nL (3.30)
Considerando uma cadeia polimérica livre, ou seja, sem interferências de
outras cadeias, a sua distância entre extremidades pode ser representada por um
vetor “ r
” com módulo entre zero e “L”. A Figura 3.9 mostra uma representação do
modelo proposto de cadeia polimérica, sendo que uma de suas extremidades é fixada
na origem do sistema de coordenadas:
Figura 3.9 – Distância entre extremidades de uma cadeia polimérica livre
38
Desta forma, “ r
” pode ser representado matematicamente por um vetor
genérico composto pela soma vetorial de “n” vetores “
” com direções aleatórias:
n
i
ir1
(3.31)
Para conhecer a distância entre extremidades da cadeia é necessário
determinar o módulo de “ r
”. O quadrado do módulo de pode ser obtido realizando o
produto escalar de um vetor por ele mesmo. Realizando esta operação vetorial em “ r
”
e aplicando na sua definição, descrita pela equação (3.31):
nnrrr
2121
2 (3.32)
De forma a simplificar a equação (3.32), é importante lembrar que todos os
vetores “ i
” possuem módulo “ ”. Desta forma, qualquer produto escalar “ ii
” terá
como resultado um escalar “ ”:
n
jk
jknn nnr
22
13121
22 (3.33)
A equação (3.33) descreve a distância quadrática entre extremidades de uma
cadeia polimérica. Entretanto, para descrever a deformação de um elastômero, é
necessário conhecer a distância média “ r ” entre extremidades de todas as “N”
cadeias poliméricas que compõe o material:
N
i i
n
jk
jknN
r1
22 21
(3.34)
Uma melhor interpretação da equação (3.34) pode ser obtida analisando com
maior profundidade o termo em somatório da equação (3.33):
kjjkjk cos
(3.35)

39
Onde “θkj” representa o ângulo entre os vetores “ k
” e “ j
”. Como o modelo
proposto de cadeia polimérica possui a hipótese básica de que cada segmento “ ”
pode adquirir qualquer orientação, independente da direção dos segmentos
adjacentes, é coerente presumir que todos os valores possíveis para ângulo “θkj”
possuem igual probabilidade de ocorrência.
Portanto, para cada produto interno de dois segmentos “ i
” que possuam um
determinado ângulo “θ”, existe outro produto interno de dois segmentos que possui
ângulo “θ + π”. Como cosθ = -cos(θ + π), a soma destes dois produtos internos
associados será zero, e por consequência o termo em somatório tenderá a zero. É
importante ressaltar que, de acordo com a equação (3.34), isto não precisa
necessariamente ocorrer em uma mesma cadeia polimérica.
Desta forma, a distância média quadrática entre extremidades de todas as
cadeias que compõe o elastômero pode ser descrita pela seguinte expressão:
22 nr (3.36)
Por definição, uma das extremidades da cadeia polimérica é fixada na origem
de um sistema de coordenadas cartesiano (Figura 3.9). Portanto, “2r ” pode ser
descrito em função das componentes do sistema de coordenadas de forma
semelhante à equação de uma esfera centrada na origem:
2222 zyxr (3.37)
Como uma das hipóteses básicas do modelo afirma que a rede de cadeias
poliméricas que compõe o elastômero é perfeita e isotrópica, a contribuição de cada
componente (x,y,z) pode ser considerada com igual probabilidade de ocorrência.
Desta forma, aplicando conceitos de probabilidade, a seguinte relação é obtida [27]:
2222
3zyx
r (3.38)

40
Considerando apenas a projeção no eixo “x” da equação (3.38) e aplicando
na equação (3.36):
33
222 nr
x (3.39)
De acordo com a equação (3.39), pode-se afirmar que cada segmento de
cadeia polimérica contribui, em média, em “ /√3” na projeção do eixo “x” da distância
média entre extremidades. Como a direção de cada segmento é considerada aleatória,
um determinado segmento pode contribuir com sinal positivo ou negativo nesta
projeção. Desta forma, do total de “n” segmentos que compõe uma cadeia polimérica
“n+” contribuem com sinal positivo enquanto “n-” contribuem com sinal negativo.
nnn (3.40)
Portanto, a projeção no eixo “x” pode ser representada pela seguinte
expressão:
3
nn
x (3.41)
A equação (3.41) pode ser solucionada como um problema de passeio
aleatório, pois é conhecido o ponto de partida (origem do sistema), qual é o módulo a
distância percorrida em cada incremento ( /√3), e que este deslocamento pode
ocorrer de forma aleatória em qualquer direção (“n+” ou “n-”). Definindo “ω(x)” como a
função densidade de probabilidade da posição da extremidade da cadeia polimérica, a
seguinte solução pode ser obtida para a equação (3.41) [29]:
22
21
xbeb
x
(3.42)
Onde “b” é uma constante definida pela seguinte expressão:
22
2
2
3
2
3
rnb
(3.43)

41
Evidentemente, a cadeia polimérica possui uma distribuição espacial
tridimensional. Generalizando a solução da projeção no eixo “x”, equação (3.42), para
o caso espacial:
2222
3
21,, zyxbe
bzyxzyx
(3.44)
Desta forma, a equação (3.44) estabelece a probabilidade da extremidade de
uma determinada cadeia estar localizada na coordenada (x,y,z). É interessante notar
que a forma desta expressão corresponde à distribuição de Gauss.
Com posse da equação (3.44), é obtido um modelo matemático estatístico
representativo do comportamento mecânico das cadeias poliméricas. Desta forma,
pode-se retornar às equações termodinâmicas para obter uma equação constitutiva
aplicável a elastômeros.
Diferenciando a energia livre de Helmholtz, equação (3.19), em relação à
variação de comprimento do elastômero e considerando que a deformação ocorre em
processo isotérmico e isovolumétrico (material incompressível), obtém-se uma
equação para descrever o esforço interno atuante no elastômero:
VTLf
,
(3.45)
Para auxiliar na solução da equação (3.45), considerando ainda processo
isotérmico e isovolumétrico, a energia livre de Helmholtz pode ser definida pela
seguinte equação, em que “U” representa a energia interna, “T” a temperatura
absoluta e “S” a entropia do material:
TSU (3.46)
O termo de entropia pode ser modelado adotando a equação da entropia de
Boltzmann, na qual esta quantidade física é relacionada com a constante de
Boltzmann (k) e a quantidade total de conformações possíveis na rede de cadeias
poliméricas que compõe o elastômero (Ω):
lnkS (3.47)

42
Se em uma condição hipotética todas as cadeias poliméricas estão
completamente estendidas, conforme apresentado na imagem mais à esquerda da
Figura 3.8, o valor de “Ω” é unitário e, desta forma, a entropia é zero. Esta condição já
havia sido prevista anteriormente de forma qualitativa.
Evidentemente, em um elastômero real, o valor “Ω” não é unitário, podendo
ser descrito pela função densidade de probabilidade de posição da extremidade da
cadeia polimérica, equação (3.44). De acordo com a hipótese (3), “Ω” pode ser
modelado da seguinte maneira:
N
i
zyx1
,, (3.48)
Aplicando (3.48) em (3.47):
N
i
zyxkS1
,,ln (3.49)
Aplicando (3.44) em (3.49) e utilizando identidades logarítmicas:
N
i
iii zyxbkb
NkS1
2222
21ln3
(3.50)
Aplicando (3.50) em (3.46):
N
i
iii zyxbkTb
NkTU1
2222
21ln3
(3.51)
Como o processo de deformação é modelado idealmente como isoenergético
(hipótese 2), o termo de energia interna (U) é uma constante. Além disto, uma parcela
do termo proveniente dos efeitos entrópicos também se tornou uma constante na
equação (3.51). Desta forma, define-se “ 0 ” como:
210 ln3
b
NkTU (3.52)

43
Com base nas equações (3.51) e (3.52), define-se “ n ” como a energia livre
de Helmholtz para um elastômero não deformado:
N
i
iiin zyxbkT1
2222
0 (3.53)
Com posse de uma expressão que descreve a energia livre de Helmholtz em
um elastômero, é possível avaliar qual é a parcela de sua energia que pode ser
convertida em trabalho. Supondo um estado de deformações principais aplicado a este
elastômero, representado pelos seus estiramentos principais “λi”:
ii xx 1 ; ii yy 1 ; ii zz 1 (3.54)
Como a rede formada de cadeias poliméricas é considerada perfeita e
uniforme (hipótese 1), a deformação macroscópica aplicada ao elastômero, descrita
pela equação (3.54), pode ser estendida para a deformação microscópica aplicada a
cada cadeia polimérica. Desta forma, xi’, yi’ e zi’ representam as coordenadas da
extremidade de uma cadeia polimérica deformada.
Definindo “ d ” como a energia livre de Helmholtz para um elastômero
deformado:
N
i
iiid zyxbkT1
2222
0 (3.55)
Aplicando (3.54) em (3.55):
N
i
iiid zyxbkT1
22
3
22
2
22
1
2
0 (3.56)
Portanto a variação de energia livre devido à deformação aplicada ao
elastômero pode ser descrita pela diferença entre as equações (3.56) e (3.53):
N
i
N
i
i
N
i
ii zbybxbkT1 1
222
3
1
222
2
222
1 111 (3.57)

44
Como a rede de cadeias poliméricas é considerada ideal, pode-se definir que
a relação os componentes de distância entre extremidades da cadeia polimérica são
estabelecidos pela equação (3.58), semelhante ao apresentado na equação (3.38),
cuja validade era para uma única cadeia polimérica sem influência das cadeias
adjacentes:
2222
3iii
i zyxr
(3.58)
Aplicando (3.58) em (3.57):
N
i
irbkT
1
222
3
2
2
2
1 33
(3.59)
Aplicando o valor da constante “b”, definida em (3.43), na equação (3.59):
N
i
irr
kT
1
2
2
2
3
2
2
2
1
13
2 (3.60)
Conforme deduzido anteriormente com auxílio de mecânica estatística, “2r ”
representa a distância quadrática média entre extremidades das cadeias considerando
estas isoladas, ou seja, sem a influência das cadeias adjacentes. Devido à presença
das ligações cruzadas no elastômero, é coerente pressupor que uma cadeia
polimérica pode influenciar na distância entre extremidades de uma cadeia adjacente,
causando uma determinada deformação inicial. Desta forma, definindo “2
0r ” como a
distância quadrática média entre extremidades de um elastômero real:
N
i
irN
r1
22
0
1 (3.61)
Aplicando (3.61) em (3.60):
32
2
3
2
2
2
12
2
0 r
rNkT (3.62)

45
O termo “22
0 rr ” da equação (3.62) pode ser compreendido como o desvio
médio de um elastômero real em relação ao ideal, ou seja, avalia como a distância
entre extremidades das cadeias poliméricas é alterada devido à influência das cadeias
adjacentes. Caso não fosse considerada esta influência, o termo “22
0 rr ” possuiria
valor unitário.
Para solucionar a equação (3.62), é necessário definir o número de cadeias
poliméricas por unidade de volume (NV):
V
NNV (3.63)
Aplicando (3.63) em (3.62):
32
2
3
2
2
2
12
2
0 r
rkTVNV (3.64)
Pode ser demonstrado que o módulo de cisalhamento “G” de um elastômero
é expresso pela seguinte equação [26]:
2
2
0
r
rkTNG V (3.65)
Aplicando (3.65) em (3.64):
32
2
3
2
2
2
1 VG
(3.66)
Supondo uma solicitação de tração uniaxial no elastômero na direção “x” do
seu sistema de coordenadas, a deformação aplicada ao mesmo pode ser
representada por um estiramento principal “λ”:
1 (3.67)
Uma das hipóteses elementares para formulação de equações constitutivas
para elastômeros é que esta classe de material é incompressível, ou seja, uma

46
restrição ao campo de deformações deve ser aplicada de tal forma que seja obtido um
estado isovolumétrico de deformação. Esta condição é expressa, de forma
matemática, pela seguinte equação:
1321 (3.68)
Aplicando (3.67) em (3.68) e considerando que comportamento isotrópico do
material:
132 (3.69)
Aplicando (3.67) e (3.69) em (3.66):
3
2
2
2
VG (3.70)
A equação (3.45) estabelece a relação entre a energia livre de Helmholtz em
relação à variação de comprimento do elastômero. De forma a incorporar o conceito
de estiramento nesta expressão, utilizando a regra da cadeia de diferenciação:
dL
d
d
d
Lf
(3.71)
Aplicando (3.70) em (3.71):
dL
dVGf
2
1 (3.72)
Definindo o volume do elastômero como o produto entre sua área inicial “A0”
pelo comprimento inicial “L0”, e definindo o estiramento “λ” como a variação do
comprimento do elastômero:
00LAV (3.73)
0L
L (3.74)

47
Aplicando (3.73) e (3.74) em (3.72):
20
1
GAf (3.75)
Definindo “σ” como a tensão de engenharia atuante no material:
2
0
1
G
A
f (3.76)
Desta forma, a equação (3.76) descreve a tensão atuante em um elastômero
submetido a uma tração uniaxial representada pelo estiramento principal “λ”. A
equação obtida corresponde ao modelo hiperelástico Neo Hookeano.
3.2.1.2. Modelo de Arruda-Boyce
Apesar de satisfazer todos os requisitos para equações constitutivas
hiperelásticas, o modelo Neo Hookeano, expresso pela equação (3.76), foi formulado
a partir de hipóteses simplificadoras extremamente idealizadas frente a um elastômero
real. Evidentemente, a rede de cadeias poliméricas se distancia bastante de uma rede
perfeita, acarretando com que o comportamento de uma cadeia polimérica interfira nas
adjacentes, e desta forma, a probabilidade real de distância entre extremidades de
uma determinada cadeia não pode ser descrita pela equação (3.44), que possui
propriedades de uma distribuição Gaussiana. Portanto, o modelo Neo Hookeano é
bastante limitado e pode representar bem o comportamento de elastômeros apenas
para pequenos níveis de deformação.
Como tentativa de obter uma equação constitutiva mais aprimorada, foram
desenvolvidos diversos modelos mecânicos com hipóteses mais realistas,
considerando uma rede polimérica cuja deformação não é descrita por estatística
Gaussiana. Um exemplo de modelo constitutivo que possui a capacidade de
representar melhor o comportamento de elastômeros em grandes deformações é o
modelo de Arruda-Boyce [30].
Neste modelo, cada cadeia polimérica também é composta por “n” segmentos
com comprimento “ ”, de tal forma que cada segmento pode adquirir qualquer
orientação, independente da direção dos segmentos adjacentes. Desta forma, a
distância entre extremidades de uma cadeia polimérica não deformada também é

48
regida por um problema de passeio aleatório podendo ser descrita pela equação (3.36)
(22 nr ). Evidentemente, outra expressão aplicável para este caso é a equação
(3.30), ( nL ), na qual é avaliado o comprimento máximo “L” que uma cadeia
polimérica pode ser estendida.
Definindo “λL” como o máximo estiramento que uma cadeia polimérica pode
suportar, o seu valor pode ser obtido a partir das equações (3.30) e (3.36):
nn
n
r
LL
(3.77)
Desta forma, a definição de “λL” age como uma informação adicional para
definir a distância entre extremidades de uma cadeia polimérica deformada “ ir ”. Com
o auxílio da estatística de Langevin, equações diferenciais estocásticas que
descrevem o movimento browniano, obtém-se a seguinte expressão para entropia de
uma cadeia polimérica deformada em “ ir ”. [30]:
senhln1
n
rnckS i (3.78)
Onde “c1” é uma constante, “k” é a constante de Boltzmann e “β” é o inverso
da função de Langevin:
n
rL i1 (3.79)
1
coth L (3.80)
A função densidade de energia de deformação do elastômero é proporcional
à alteração de entropia de todas as cadeias poliméricas que o compõe, podendo ser
definido pela seguinte expressão:
2senh
ln Tcn
rkTnNW i
V
(3.81)

49
Onde “c2” é uma constante, “T” a temperatura absoluta e “NV” representa o
número de cadeias poliméricas por unidade de volume. De posse da equação (3.81),
que representa a energia de deformação do elastômero, é necessário determinar qual
é a distância entre extremidades de uma cadeia polimérica deformada “ ir ”.
Para isto, é proposto um modelo de célula unitária cúbica composta por oito
cadeias poliméricas de tal forma que uma das extremidades de cada cadeia é
posicionada no centro do cubo, em um ponto comum de ligação entre as cadeias,
representando assim a reticulação do elastômero. A outra extremidade de cada cadeia
se encontra em um dos vértices do cubo. A disposição das cadeias poliméricas na
célula unitária está ilustrada na Figura 3.10:
Figura 3.10 – Modelo de célula unitária com oito cadeias poliméricas. Condição de elastômero
não deformado (esquerda) e deformado (direita)
Ainda da Figura 3.10, observa-se que a célula unitária possui aresta com
comprimento inicial “a0”. Quando submetido a uma deformação, o comprimento das
arestas é alterado para “λ1a0”, “λ2a0” e “λ3a0”, em cada uma das direções principais de
deformação. Portanto, uma hipótese importante deste modelo é que a célula unitária
sempre está alinhada a um estado principal de deformações do elastômero.
Considerando o estado não deformado da célula unitária, representado pela
imagem à esquerda da Figura 3.10, observa-se que a distância entre extremidades
inicial de cada cadeia polimérica está relacionada com a diagonal do cubo da célula
unitária da seguinte forma:
3
20
ra (3.82)

50
Em um estado deformado, representado pela imagem à direita da Figura
3.10, a distância entre extremidades deformada de cada cadeia polimérica pode ser
expressa por um vetor composto pelos seguintes componentes:
ka
ja
ia
riˆ
2ˆ
2ˆ
23
02
01
0
(3.83)
Realizando o produto escalar de “ ir
” por ele mesmo, obtém-se o comprimento
deste vetor:
2
3
2
02
2
2
02
1
2
02
444
aaarrr iii
2
3
2
2
2
10
2
ari (3.84)
Aplicando (3.82) em (3.84):
2
3
2
2
2
13
r
ri (3.85)
O primeiro invariante do tensor de deformações “I1” pode ser definido como:
2
3
2
2
2
11 I (3.86)
Aplicando (3.86) em (3.85):
13
Ir
ri (3.87)

51
Desta forma, com conhecimento da equação (3.87), a função densidade de
energia de deformação, equação (3.81), pode ser solucionada por uma expansão em
séries da seguinte forma [30]:
27
1050
19
20
13
2
1 3
14
2
121 IIIkTNWLL
V
243
673750
184
7000
1 5
18
4
16IIkTN
LL
V
(3.88)
Recapitulando que o módulo de cisalhamento é definido equação (3.65) e
desconsiderando o desvio médio da distância entre extremidades de um elastômero
real em relação ao ideal, e aplicando esta definição na equação (3.88), obtém-se uma
expressão final da função densidade de energia de deformação do modelo de Arruda-
Boyce:
27
1050
119
20
13
2
1 3
14
2
121 IIIGWLL
243
673750
51981
7000
19 5
18
4
16IIG
LL
(3.89)
3.2.2. Tratamento fenomenológico
No capítulo 3.2.1, os modelos hiperelásticos Neo Hookeano e de Arruda-
Boyce foram desenvolvidos aplicando restrições termodinâmicas e desenvolvendo
modelos mecânicos estatísticos complexos para estabelecer o comportamento das
cadeias poliméricas que constituem o elastômero. Diversas hipóteses foram
postuladas e representadas em expressões matemáticas de forma a obter uma
equação constitutiva representativa desta classe de materiais.
Uma alternativa a metodologia da termodinâmica estatística é propor
diretamente uma função densidade de energia de deformação, sujeita somente às
restrições de sólidos isotrópicos pela mecânica do contínuo. Com esta metodologia, é
almejado obter uma equação constitutiva observando somente o comportamento
macroscópico dos elastômeros, não havendo qualquer hipótese baseada em sua
estrutura molecular. Por esta razão, este método de obtenção de equações
hiperelásticas é denominado como tratamento fenomenológico.

52
Conforme indica a definição, a função densidade de energia de deformação
“W” mensura a energia de deformação do elastômero por unidade de volume [J/m³].
Para garantir que o material tenha comportamento perfeitamente elástico, “W” deve
ser função apenas do tensor gradiente de deformações (F).
FfW (3.90)
Em notação indicial, definindo “Xi” como a coordenada inicial de um
determinado ponto material e “xi” a coordenada espacial em que o material se localiza
após uma determinada deformação, o tensor gradiente de deformações “F” pode ser
definido como [31]:
i
iij
X
xF
(3.91)
Para fornecer isotropia à equação constitutiva, uma das hipóteses
elementares da hiperelasticidade, o tensor de Cauchy-Green à esquerda (B) é
adotado como medida para avaliar a deformação no elastômero, o que garante este
comportamento à equação constitutiva que será desenvolvida [31]:
TFFB (3.92)
Com a definição de “B” pela equação (3.92), pode-se redefinir a função
densidade de energia de deformação:
BfW (3.93)
Se a “W” é função apenas de “B”, a energia de deformação deve ser função
dos invariantes de “B”, definidos pelas seguintes expressões [31]:
iiBtrI B1 (3.94)
jiijkk BBBtrtrI 222
22
1
2
1BB (3.95)
kjiijk BBBI 3213 det B (3.96)

53
Definindo um sistema de coordenadas orientado pelos autovetores de “B”, o
tensor de Cauchy-Green à esquerda pode ser representado em notação matricial
conforme a equação (3.97), sendo “bi” os autovalores associados.
3
2
1
00
00
00
b
b
b
B (3.97)
Esta referência está associada a um estado de deformações principais do
material. Desta forma, a deformação do material pode ser representada pelos seus
estiramentos principais “λi”:
iii Xx (3.98)
Aplicando (3.98) em (3.91), o tensor gradiente de deformações “F” pode ser
representado em notação matricial em termos dos estiramentos principais “λi”:
3
2
1
00
00
00
F (3.99)
Aplicando (3.99) em (3.92):
2
3
2
2
2
1
00
00
00
B (3.100)
Aplicando (3.100) em (3.94), (3.95) e (3.96), os invariantes de “B” podem ser
redefinidos em função dos estiramentos principais “λi”:
2
3
2
2
2
11 I (3.101)
2
3
2
1
2
3
2
2
2
2
2
12 I (3.102)
2
3
2
2
2
13 I (3.103)
O Jacobiano, representado pelo determinante de “F”, representa a variação
de volume do material frente à deformação atuante. Como uma das hipóteses

54
elementares da hiperelasticidade afirma que o material pode ser modelado com
comportamento incompressível, o valor do Jacobiano é unitário:
1det 321 F (3.104)
Aplicando (3.104) em (3.102) e (3.103):
2
3
2
2
2
1
2
111
I (3.105)
13 I (3.106)
Desta forma, sendo “I3” uma constante, a função densidade de energia de
deformação pode ser redefinida como função apenas dos dois primeiros invariantes:
21, IIfW (3.107)
Utilizando o princípio dos trabalhos virtuais, as tensões principais do primeiro
tensor de Piola-Kirchhoff “σ”, usualmente denominado de tensão de engenharia,
podem ser obtidas pela seguinte expressão:
i
i
W
(3.108)
Aplicando a regra da cadeia de diferenciação na equação (3.108) e
considerando que 21, IIfW :
ii
i
I
I
WI
I
W
2
2
1
1
(3.109)
A relação entre a tensão de Cauchy “σr”, usualmente denominada de tensão
real, com a primeira tensão de Piola-Kirchhoff é dada pela seguinte expressão:
rσJFσ1 (3.110)

55
Com o conhecimento de que o jacobiano é unitário e com “F-1” podendo ser
determinado a partir de (3.99), obtém-se a seguinte relação entre os componentes de
tensão:
iiir (3.111)
Portanto, de forma resumida, qualquer função densidade de energia de
deformação proposta deve depender apenas do primeiro e do segundo invariante do
tensor de Cauchy-Green à esquerda, definidos pelas equações (3.101) e (3.105), e a
tensão associada pode ser determinada pelas equações (3.109) e (3.111).
Serão apresentados a seguir alguns modelos fenomenológicos adotados para
descrever o comportamento hiperelástico de materiais elastoméricos.
3.2.2.1. Modelo Neo Hookeano por tratamento fenomenológico.
O modelo Neo Hookeano já foi deduzido através de tratamento
termodinâmico estatístico. Entretanto, é relevante verificar que, se for adotada uma
função densidade de energia de deformação conforme a equação (3.112) [32], será
obtida uma equação constitutiva hiperelástica equivalente à deduzida anteriormente.
3110 ICW (3.112)
Redefinindo a equação (3.66) em termos do primeiro invariante do tensor de
Cauchy-Green à esquerda, equação esta que descreve a energia livre de Helmholtz
do modelo Neo Hookeano:
32
1 IVG
(3.113)
Recordando que a energia livre de Helmholtz mensura a energia total um
sistema termodinâmico que pode ser convertida em trabalho [J], enquanto que a
função densidade de energia de deformação mensura a energia de deformação do

56
elastômero por unidade de volume [J/m³], observa-se a seguinte relação entre as
constantes das equações (3.112) e (3.113):
210
GC (3.114)
3.2.2.2. Modelo de Mooney-Rivlin
O modelo de Mooney-Rivlin é formulado a partir da função densidade de
energia de deformação proposta pela equação (3.115) [32]:
33 201110 ICICW (3.115)
Bastante semelhante ao modelo Neo Hookeano, a diferença é a incorporação
da hipótese de que a deformação do elastômero também depende do segundo
invariante do tensor de Cauchy-Green à esquerda.
3.2.2.3. Modelo de Ogden
O modelo de Ogden é formulado a partir da função densidade de energia de
deformação proposta pela equação (3.116) [32]:
N
i i
i iiiW1
32123
2
(3.116)
Observa-se que o modelo de Ogden diferencia um pouco das formulações
anteriormente apresentadas. Ao invés de ser função dos invariantes do tensor de
Cauchy-Green à esquerda, este modelo depende diretamente dos estiramentos
principais. É interessante observar que, se forem adotados coeficientes adequados, o
modelo de Ogden pode representar o modelo Neo Hookeano ou o modelo de Mooney-
Rivlin.
3.2.2.4. Modelo de Yeoh
Este modelo hiperelástico propõe que a deformação do elastômero depende
mais intensamente do primeiro invariante do tensor de Cauchy-Green à esquerda,
sendo mais vantajoso desconsiderar os efeitos do segundo invariante [33]. A função

57
densidade de energia de deformação proposta está apresentada na equação (3.117)
[32]:
3130
2
120110 333 ICICICW (3.117)
3.2.2.5. Modelo Polinomial
O modelo Polinomial é formulado a partir da função densidade de energia de
deformação proposta pela equação (3.118) [10]:
N
ji
ji
ij IICW1
21 33 (3.118)
Esta equação constitutiva costuma fornecer boa correlação para deformações
inferiores a 100%. Adotando coeficientes “Cij” adequados, o modelo Polinomial pode
representar o modelo Neo Hookeano, o Modelo de Mooney-Rivlin, ou o Modelo de
Yeoh.
3.2.2.6. Modelo Polinomial Reduzido
O modelo Polinomial Reduzido é bastante semelhante ao modelo Polinomial.
A única diferença é que é desconsiderada a influência do segundo invariante do tensor
de Cauchy-Green à esquerda. A função densidade de energia de deformação
proposta está apresentada na equação (3.119) [10]:
N
i
i
i ICW0
10 3 (3.119)
Se for considerado “N=3”, o modelo Polinomial Reduzido representa o modelo
de Yeoh. Desta forma, este modelo é por vezes denominado como modelo de Yeoh
Generalizado.
3.2.3. Comentários sobre abordagens para obtenção de equações constitutivas hiperelásticas
Observa-se que, dependendo da abordagem adotada, os meios para
obtenção de equações hiperelásticas são bastante diferenciados. Entretanto, as

58
expressões finais obtidas possuem semelhanças, pois a tensão atuante no elastômero
pode ser representada em função dos invariantes do tensor de Cauchy-Green à
esquerda.
Alguns autores defendem que o tratamento termodinâmico estatístico é mais
adequado, pois a deformação do elastômero é modelada a partir de comportamentos
físicos específicos desta classe de material, e somente deste modo o comportamento
mecânico pode ser estabelecido com eficácia [30].
Outros autores defendem que o tratamento fenomenológico possui melhor
capacidade de representar o comportamento do elastômero em grandes deformações,
visto que, no caso do tratamento estatístico, a adoção de hipóteses simplificadoras
para modelar o comportamento microscópico das cadeias poliméricas desvia o foco
principal das equações hiperelásticas, isto é, a obtenção de um modelo que
represente o comportamento macroscópico do material [26, 27].
Além disto, também foram desenvolvidos modelos híbridos que utilizam
ambos os tratamentos para modelar o comportamento dos elastômeros. Alguns
modelos aplicam parâmetros de ajuste fenomenológicos para corrigir imperfeições da
mecânica estatística, outros combinam diferentes modelos para permitir a descrição
do material em pequenas e grandes deformações [32].
A priori, não é possível afirmar qual abordagem ou modelo é o mais
adequado para representar o comportamento de um determinado elastômero. A
melhor metodologia a ser realizada é verificar qual equação constitutiva mais se
adequa ao problema que está sendo modelado, observando não somente o material,
mas também a sua aplicação, como por exemplo, se está submetido a pequenas ou
grandes deformações.
3.3. Comportamento viscoelástico
As equações hiperelásticas acima deduzidas são capazes de descrever com
eficácia o comportamento de elastômeros em uma condição de equilíbrio. Entretanto,
é conhecido que o comportamento mecânico desta classe de materiais é dependente
também da taxa de carregamento.
Assim como na análise da hiperelasticidade, o comportamento mecânico em
função da taxa de carregamento também pode ser compreendido analisando a
microestrutura dos materiais elastoméricos. A elasticidade dos polímeros, tipo de
material a qual pertence os elastômeros, provém da deformação de suas cadeias
poliméricas (alteração do ângulo das ligações principais e consequente alteração de
conformação da cadeia). Quando uma deformação é aplicada, as cadeias poliméricas

59
tendem a deslizar entre si, causando um atrito interno no material, e por fim gerando
um efeito macroscópico de defasagem entre solicitação e resposta.
Dependendo da temperatura de trabalho e/ou do tempo de aplicação de
carregamento, o efeito do atrito entre as cadeias poliméricas pode se tornar mais
evidente. Com isto, verifica-se a presença de toda a gama de respostas intermediárias
entre sólido perfeitamente elástico e líquido viscoso ideal, ou seja, um comportamento
mecânico viscoelástico [34].
3.3.1. Viscoelasticidade linear
Conforme o próprio termo indica, um modelo viscoelástico deve apresentar ao
mesmo tempo características elásticas e viscosas, o que corresponderia
individualmente ao comportamento de um material sólido e de um material líquido,
respectivamente. Uma abordagem extensivamente utilizada para descrever este
fenômeno se baseia em combinações de elementos que representem estes
comportamentos extremos de um material dito viscoelástico, fornecendo uma equação
diferencial para descrever o comportamento mecânico de um polímero [34].
A parcela elástica de um modelo viscoelástico linear é representada
mecanicamente por uma mola cujo comportamento é regido pela Lei de Hooke.
Portanto, a tensão atuante no elemento elástico é diretamente proporcional à
deformação aplicada, cuja proporcionalidade é estabelecida por um módulo de
elasticidade “E”, conforme estabelecido na equação (3.120):
E (3.120)
A parcela viscosa do modelo é representada mecanicamente por um
amortecedor composto por um fluido newtoniano. Desta forma, a tensão atuante no
elemento viscoso é diretamente proporcional à taxa de deformação aplicada, cuja
proporcionalidade é estabelecida por um coeficiente de viscosidade “η”, conforme
estabelecido na equação (3.121):
dt
d (3.121)
Para facilitar a compreensão dos modelos mecânicos de viscoelasticidade, os
componentes são comumente representados de maneira gráfica conforme ilustrado na
Figura 3.11:

60
Figura 3.11 – Representação gráfica de um elemento mecânico elástico (esquerda) e de um
elemento mecânico viscoso (direita)
3.3.1.1. Modelo de Kelvin-Voigt
O modelo de Kelvin-Voigt é composto pelo acoplamento em paralelo de uma
mola e de um amortecedor, conforme ilustrado na Figura 3.12
Figura 3.12 – Representação gráfica do modelo viscoelástico linear de Kelvin-Voigt
Como os elementos estão em paralelo, a tensão atuante no modelo é dada
pela soma das tensões individuais de cada elemento, enquanto que a deformação
total do modelo é igual à deformação individual de cada componente:
21 (3.122)
21 (3.123)
σ, ε σ1, ε1 E σ2, ε2 η

61
Aplicando as relações constitutivas dos elementos individuais, equações
(3.120) e (3.121), na equação (3.122) é obtida a expressão que descreve a tensão
atuante no modelo de Kelvin-Voigt:
dt
dE
(3.124)
Um método comum para verificar a ocorrência de efeitos viscoelásticos em
materiais é a execução de um ensaio de relaxação, na qual uma determinada
deformação prescrita é aplicada e a evolução tensão é monitorada. Matematicamente,
a condição de relaxação é representada pela seguinte expressão:
0dt
d (3.125)
Aplicando (3.125) em (3.124), é imediatamente compreendido que o modelo
de Kelvin-Voigt se comporta em relaxação como um sólido perfeitamente elástico, pois
o resultado fica degenerado à solução do elemento mecânico elástico, expresso pela
equação (3.120).
Portanto, conclui-se que o modelo de Kelvin-Voigt não reproduz
completamente o comportamento viscoelástico de polímeros.
3.3.1.2. Modelo de Maxwell
O modelo de Maxwell é composto pelo acoplamento em série de uma mola e
de um amortecedor, conforme ilustrado na Figura 3.13:
Figura 3.13 – Representação gráfica do modelo viscoelástico linear de Maxwell
σ1, ε1 E
σ2, ε2 η
σ, ε

62
Como os elementos estão em série, a tensão atuante em ambos os
elementos deve ser a mesma, enquanto que a deformação total do modelo pode ser
descrita como a soma das deformações individuais de cada elemento:
21 (3.126)
21 (3.127)
Diferenciando a equação (3.127) em relação ao tempo:
dt
d
dt
d
dt
d 21 (3.128)
Diferenciando a equação constitutiva do elemento elástico, representado pela
equação (3.120), em relação ao tempo:
dt
dE
dt
d 1 (3.129)
Aplicando (3.129) em (3.128):
dt
d
dt
d
Edt
d 21 (3.130)
Aplicando a equação constitutiva do elemento viscoso, representado pela
equação (3.121), na equação (3.130), é obtida a expressão que descreve a taxa de
deformação do modelo de Maxwell:
dt
d
Edt
d 1 (3.131)
Uma análise importante a ser realizada no modelo de Maxwell é considerar
uma situação de solicitação de fluência, ou seja, em que a tensão atuante no material
é permanecida constante e a evolução de deformação é monitorada.
Matematicamente, a condição de fluência é representada pela seguinte expressão:
0dt
d (3.132)

63
Aplicando (3.132) em (3.131):
dt
d (3.133)
Analisando o resultado apresentado na equação (3.133), observa-se que o
modelo de Maxwell se comporta em fluência como um fluido viscoso, pois o resultado
fica degenerado à solução do elemento mecânico viscoso, expresso pela equação
(3.121).
Portanto, conclui-se que o modelo de Maxwell não reproduz completamente o
comportamento viscoelástico de polímeros.
3.3.1.3. Modelo Sólido Padrão
Conforme apresentando anteriormente, os modelos de Kelvin-Voigt e de
Maxwell falham em descrever completamente o comportamento viscoelástico de
polímeros, sendo que cada modelo possui uma determinada deficiência frente a uma
solicitação específica.
De forma a descrever com maior veracidade o comportamento de um
polímero, o modelo conhecido como Sólido Padrão é composto pelo acoplamento de
um modelo de Maxwell em paralelo com um elemento de mola, conforme ilustrado na
Figura 3.14:
Figura 3.14 – Representação gráfica do modelo viscoelástico linear de Maxwell
Evidentemente, a solução da composição a direita do modelo Sólido Padrão
corresponde à solução do modelo de Maxwell, representado matematicamente pela
σ, ε
E1
η
σ2, ε2 E2 σ1, ε1

64
equação (3.131), cujos parâmetros serão representados neste momento pelo
subíndice “1”.
Como o elemento de mola adicional é acoplado em paralelo ao modelo de
Maxwell, a tensão atuante no modelo Sólido Padrão é dada pela soma das tensões de
cada ramo, enquanto que a deformação total do modelo é igual à deformação
individual de cada ramo:
21 (3.134)
21 (3.135)
Aplicando a solução do modelo de Maxwell e a equação constitutiva do
elemento elástico, equações (3.131) e (3.120) respectivamente, na equação (3.134):
21
1
1E
dt
d
Edt
d
(3.136)
Derivando a equação (3.134) em relação ao tempo:
dt
d
dt
d
dt
d 21 (3.137)
Aplicando (3.137) em (3.136):
22
1
1E
dt
d
dt
d
Edt
d
(3.138)
Diferenciando a equação constitutiva do elemento elástico, representado pela
equação (3.120), em relação ao tempo:
dt
dE
dt
d 2
2 (3.139)

65
Aplicando (3.139) em (3.138) e reorganizando os termos, é obtida a equação
diferencial que descreve o comportamento mecânico do modelo Sólido Padrão:
dt
d
E
EE
dt
d
E
1
22
1
1 (3.140)
A eficiência do modelo Sólido Padrão pode ser analisada verificando o seu
comportamento sob uma solicitação de relaxação ou de fluência, solicitações nas
quais os modelos anteriormente deduzidos falharam em descrever.
Em uma solicitação de relaxação, o material é submetido a uma determinada
deformação prescrita “ε0” e a evolução tensão é monitorada. Aplicando esta condição
no modelo Sólido Padrão, a seguinte solução é obtida:
02
1
Edt
d
E (3.141)
Considerando uma condição inicial (t=0) na qual o modelo Sólido Padrão é
submetido a uma tensão inicial “σi”, deseja-se verificar qual seria a tensão final “σf”
atuante no modelo após um determinado tempo “t”. Reorganizando a equação (3.141)
e definindo limites de integração apropriados para esta análise:
t
dtE
dE
f
i 0
1
02
1
(3.142)
tE
EE if
10202 lnln (3.143)
Reorganizando a equação (3.143) isolando “σf”:
tE
i
tE
f eeE
11
102 (3.144)
Analisando o resultado do modelo Sólido Padrão em relaxação, a tensão
inicial “σi” decai exponencialmente para uma tensão de equilíbrio “E2ε0”, cujo tempo de
decaimento depende de uma constante estabelecida pela relação “E1/η”. Este
comportamento indica que a condição de equilíbrio corresponde somente ao

66
comportamento do modelo de mola em paralelo do modelo Sólido Padrão, enquanto
que o comportamento transiente corresponde à composição representativa de um
modelo de Maxwell (ver Figura 3.14).
Realizando uma análise semelhante para um caso de fluência, na qual a
tensão atuante no material é permanecida constante em “σ0” e a evolução de
deformação é monitorada, o comportamento do modelo Sólido Padrão é descrito pela
seguinte equação:
dt
d
E
EE
1
220 1 (3.145)
Considerando uma condição inicial (t=0) na qual o modelo Sólido Padrão é
submetido a uma deformação inicial “εi”, deseja-se verificar qual seria a deformação
final “εf” aplicada ao modelo após um determinado tempo “t”. Reorganizando a
equação (3.145) e definindo limites de integração apropriados para esta análise:
t
dtEE
Ed
E
f
i 021
1
20
11
(3.146)
tEE
EEE
Eif
21
12020
2
1lnln
1
(3.147)
Reorganizando a equação (3.147) isolando “εf”:
21
21
21
21 11
2
0 1EE
EE
i
EE
EE
f eeE
(3.148)
Analisando o resultado do modelo Sólido Padrão em fluência, a deformação
inicial “εi” decai exponencialmente para uma deformação de equilíbrio “σ0/E2”, cujo
tempo de decaimento depende de uma constante em função dos parâmetros elásticos
e viscosos do modelo.
Analogamente ao resultado obtido para a solicitação de relaxação, o
comportamento em fluência do modelo Sólido Padrão também indica que a condição
de equilíbrio corresponde ao comportamento individual do modelo de mola, enquanto
que a condição viscoelástica transiente corresponde à composição representativa de
um modelo de Maxwell (ver Figura 3.14).

67
3.3.2. Modelo de Bergstrom-Boyce – viscoelasticidade não-linear aplicada a elastômeros
Dos modelos viscoelásticos lineares anteriormente estudados, o mais
adequado para descrever a reposta geral de polímeros é o modelo Sólido Padrão.
Entretanto, o comportamento dos elementos elásticos que compõe este modelo é
regido pela lei de Hooke e o elemento viscoso considera um comportamento de fluido
newtoniano.
De acordo com estas leis constitutivas, o resultado obtido para o modelo
Sólido Padrão só é válido para pequenas deformações e taxas de deformação [34], o
que pode ser considerado como uma regra razoavelmente geral para plásticos e
fibras, mas seria apenas uma condição particular para o caso de elastômeros.
De forma a adequar o modelo Sólido Padrão para materiais elastoméricos, foi
desenvolvido o modelo de Bergstrom-Boyce [35], na qual os elementos elásticos não
respondem mais à lei de Hooke, mas sim a uma determinada equação constitutiva
hiperelástica. Esta hipótese é adequada, pois existem evidências de que a o
comportamento de elastômeros sob uma solicitação infinitamente lenta corresponde a
teoria da hiperelasticidade [35].
Considerando um modelo hiperelástico fenomenológico, a tensão atuante em
um elemento elástico depende da função densidade de energia de deformação
adotada (W) e do tensor gradiente de deformações (F) atuante no componente
elástico.
De maneira análoga, o elemento viscoso não pode ser modelado com base
no comportamento de fluido newtoniano. A taxa de deformação atuante no elemento
viscoso é mensurada pelo tensor gradiente de velocidade (L), sendo definido pela
seguinte equação [31]:
vL grad (3.149)
De maneira alternativa, o tensor gradiente de velocidade pode ser relacionado
com o tensor gradiente de deformações pela seguinte equação [31]:
1 FFL (3.150)
O tensor gradiente de velocidade do elemento viscoso (v
BL~
) é definido
constitutivamente pela taxa de deformação viscosa (v
B ) e por “NB”, tensor que fornece

68
a direção para a configuração relaxada do elastômero, isto é, condição em que não há
efeitos de forças viscosas [35]:
B
v
B NLv
B~
(3.151)
Onde “BN ” é definido pela seguinte equação:
B
B
rdev
rdev
Bσ
σN
2
3 (3.152)
Na equação (3.152), “Brdevσ ” indica o tensor deviatórico de tensões de
Cauchy atuante no domínio “B” e “Brdevσ ” sua magnitude, sendo determinada pela
seguinte expressão [31]:
Brdevrdevrdev σσσ
BB
Ttr (3.153)
Conforme apresentado nas equações (3.150) e (3.151), as variáveis do
modelo de Bergstrom-Boyce são estabelecidas na forma tensorial, ou seja, são válidas
para um caso tridimensional geral de solicitações. Entretanto, para facilitar a
compreensão do modelo, uma representação gráfica unidimensional do modelo de
Bergstrom-Boyce é apresentada na Figura 3.15. Verifica-se que o seu conceito é o
mesmo do modelo Sólido Padrão (Figura 3.14): uma parte modela o comportamento
do elastômero em equilíbrio (domínio “A”) em paralelo com outra parte que captura o
comportamento viscoelástico transiente do material (domínio “B”) [35]:

69
Figura 3.15 – Representação unidimensional do modelo de Bergstrom-Boyce
Analisando somente o domínio “B”, os elementos elástico e viscoso estão em
série. Portanto, ambos estão submetidos ao tensor de tensões “Bσ ”. Como os
domínios “A” e “B” estão dispostos em paralelo, o tensor de tensões atuante no
modelo é dado pela soma dos tensores individuais de cada domínio:
BA σσσ (3.154)
Por se tratar de um único material, é coerente definir que o comportamento
dos elementos elásticos dos domínios “A” e “B” deve ser semelhante, ou seja, que
deve ser adotado o mesmo modelo hiperelástico e que seus coeficientes devem ter
uma relação definida. Com base nesta hipótese, define-se “S” como o fator de escala
de tensão para definir a função densidade de energia de deformação do domínio “B”
(WB) como função de “WA”, recordando que esta segunda função corresponde à
solução hiperelástica para uma solicitação infinitamente lenta:
AB SWW (3.155)
A representação unidimensional da Figura 3.15 não é suficiente para
determinar o comportamento em deformação do modelo de Bergstrom-Boyce em
notação tensorial. Como o domínio “B” está em paralelo com o domínio “A”, a
deformação total do modelo é igual à deformação individual de cada domínio. Em
σ, ε
e
BB Fσ ,BWf
AA Fσ ,AWf
B
v
B NLv
B~
Domínio “A” Domínio “B”

70
notação tensorial, o tensor gradiente de deformações do modelo (F) é igual ao tensor
gradiente de deformações de cada domínio:
BA FFF (3.156)
O tensor gradiente de deformações do domínio “B” pode ser decomposto
como o produto dos tensores de deformação do modelo elástico (e
BF ) e do modelo
viscoso (v
BF ):
v
B
e
BB FFF (3.157)
Uma representação gráfica da decomposição multiplicativa de deformação do
modelo de Bergstrom-Boyce está apresentada na Figura 3.16 [36]:
Figura 3.16 – Decomposição multiplicativa de deformação do modelo de Bergstrom-Boyce
Da Figura 3.16, observa-se que não há dificuldade em encontrar a
configuração relaxada do elastômero. Quando uma determinada deformação
constante é aplicada ao elastômero em um tempo suficientemente elevado, é obtida
uma condição em que “ IFe
B ” (tensor identidade) e a solução se reduz ao caso da
equação constitutiva hiperelástica. Entretanto, para uma condição transiente genérica,
na qual há uma determinada deformação atuante no elemento elástico do domínio "B",
é necessário determinar a taxa de deformação neste domínio, representado
BA FFF
v
BF
e
BF
Configuração de
referência
Configuração
atual
Configuração relaxada

71
matematicamente pelo tensor gradiente de velocidade do domínio "B" (BL ). Aplicando
a equação (3.150) para o caso do domínio “B”:
1 BBB FFL (3.158)
Aplicando (3.157) em (3.158):
1 v
B
e
B
v
B
e
BB FFFFL (3.159)
Aplicando propriedades de tensor inverso e de diferenciação de tensores na
equação (3.159) [31]:
1111 e
B
v
B
v
B
e
B
e
B
v
B
v
B
e
BB FFFFFFFFL
111 e
B
v
B
v
B
e
B
e
B
e
BB FFFFFFL (3.160)
Observando a definição de “L” em função de “F”, definido pela equação
(3.150), e aplicando na equação (3.160):
1 e
B
v
B
e
B
e
BB FLFLL (3.161)
Definindo “v
BL~
” como:
1~ e
B
v
B
e
B
v
B FLFL (3.162)
Aplicando (3.162) em (3.161):
v
B
e
BB LLL~
(3.163)
.

72
O tensor “v
BL~
” pode ser descrito como a soma de sua parte simétrica (v
BD~
),
representando a taxa de estiramento no material, com sua parte antissimétrica (v
BW~
),
representando um movimento de corpo rígido no material:
v
B
v
B
v
B WDL~~~
(3.164)
2
~~~
Tv
B
v
Bv
B
LLD
(3.165)
2
~~~
Tv
B
v
Bv
B
LLW
(3.166)
Em um processo de descarregamento definido pelo tensor gradiente de
velocidade “v
BL~
”, uma etapa intermediária não tem solução única, visto que um
movimento de corpo rígido arbitrário pode acarretar em um estado nulo de tensões.
Uma das soluções possíveis para tornar o processo de deformação único é considerar
o movimento de corpo rígido viscoso nulo ( 0~
v
BW ) [35]. Desta forma, a equação
(3.151) pode ser simplificada como:
B
v
B NDv
B~
(3.167)
Conforme mencionado anteriormente, a taxa de deformação viscosa “v
B ”
precisa ser definida constitutivamente. O modelo de Bergstrom-Boyce define este
parâmetro com base na Teoria de Reptação, modelo molecular que visa descrever o
comportamento em deformação das cadeias poliméricas.
A Figura 3.17 mostra o esquema de uma rede polimérica na qual existe uma
cadeia polimérica livre, representada na cor vermelha. Os pontos da figura
representam cadeias normais ao plano da folha [36]:

73
Brancaco
Figura 3.17 – Modelo de cadeia polimérica com uma cadeia livre
Na Figura 3.17, a situação (a) representa a rede polimérica não deformada.
Em um determinado instante, o elastômero é deformado em uma elevada taxa de
deformação, sendo obtida a situação (b). Como não há tempo suficiente para o
relaxamento das cadeias poliméricas, a cadeia livre representada em vermelho é
estirada, reduzindo sua entropia e gerando como reação um esforço adicional na rede
polimérica. Se a deformação macroscópica aplicada ao material é mantida constante,
a cadeia livre tende a retornar para uma configuração relaxada, aumentado assim a
sua entropia, situação representada em (c). Neste momento, nenhum esforço adicional
é aplicado e a rede polimérica atinge sua configuração relaxada [36].
Com base neste modelo, foi deduzida a seguinte equação representativa da
taxa de deformação viscosa “v
B ” para o modelo de Bergstrom-Boyce [35]:
mB
Ccr
B
v
B EA 1 (3.168)
(a) Rede não
deformada
(b) Rede
deformada
(c) Rede
deformada
relaxada

74
Onde “cr
B ” é o estiramento de fluência do domínio “B” e “B ” é a tensão
efetiva atuante no domínio “B”. Estes parâmetros são determinados pelas seguintes
equações:
Tcr
B trtr v
B
v
B
v
B FFB3
1
3
1 (3.169)
BB rdevrdev σσ :2
3B (3.170)
“A”, “E”, “C” e “m” são constantes materiais que definem o comportamento do
modelo constitutivo viscoso:
“A” – Parâmetro de fluência. Valor não negativo que pode ser
interpretado como o valor base de viscosidade, sendo este
independente da taxa de carregamento e da tensão atuante.
“E” – Constante de estabilização do modelo de Bergstrom-Boyce. Este
parâmetro não é baseado em nenhum argumento físico e não estava
presente na dedução inicial do modelo. Entretanto, se na equação
(3.168) for considerado “E=0” e uma situação de material não
deformado ( 1cr
B ), observa-se que o modelo chega a uma
singularidade e a equação constitutiva não tem solução. Desta forma
“E” é utilizado como um artifício para tornar o modelo mais estável,
sendo comumente considerado E≈0,01 [37].
“C” – Expoente de deformação de fluência. Expoente restrito a valores
no domínio [-1,0], fornecendo uma não linearidade em função da
deformação de fluência atuante no domínio “B”.
“m” – Expoente de tensão efetiva. Expoente normalmente com valor
maior que 1, fornecendo uma não linearidade em função da tensão
atuante no domínio “B”
3.4. Efeito Mullins
Anteriormente, foi discutido que o comportamento em equilíbrio dos
elastômeros pode ser descrito com eficácia pelas equações constitutivas
hiperelásticas. Entretanto, nesta classe de materiais, raramente uma solicitação real é
aplicada de forma suficientemente lenta tal que possa ser considerada um

75
carregamento quase estático, ou seja, que a deformação do elastômero pode ser
representada como a evolução de uma sucessão de estados de equilíbrio. Para
capturar o comportamento mecânico dependente da taxa de carregamento, foi
discutido que é necessário adotar um modelo viscoelástico, sendo o modelo de
Bergstrom-Boyce um ótimo candidato para descrever a viscoelasticidade dos
elastômeros.
Embora bastante sofisticado, o uso de um modelo visco-hiperelástico não-
linear ainda não é suficiente para descrever completamente a resposta de alguns
elastômeros, sendo o caso do elastômero de poliuretano um exemplo. Nestes casos
específicos, ainda é necessário aprimorar o modelo mecânico de forma a introduzir o
comportamento do efeito Mullins em sua resposta.
Considerando um elastômero virgem, o material tende a responder de uma
maneira mais rígida em uma primeira solicitação do que em carregamentos
subsequentes. Se os próximos carregamentos forem inferiores à deformação máxima
à qual o elastômero já foi submetido, é observado um comportamento com menor
rigidez na curva “tensão-deformação” do material. Este fenômeno foi observado pela
primeira vez por Mullins em 1969 [38].
A Figura 3.18 ilustra em maiores detalhes o comportamento característico do
efeito Mullins em um elastômero hipotético. Em um primeiro momento, dois
carregamentos cíclicos são aplicados até uma deformação normalizada de
aproximadamente 20% (curva azul). Em seguida, o material é submetido a três
carregamentos cíclicos de aproximadamente 50% deformação normalizada (curva
alaranjada). Por último, quatro carregamentos cíclicos são aplicados ao material em
uma deformação normalizada prescrita de aproximadamente 100% (curva vermelha).
A linha tracejada de cor preta representa o comportamento do material em equilíbrio
hiperelástico, ou seja, a resposta obtida a partir de um ensaio de tração monotônica de
um elastômero virgem.
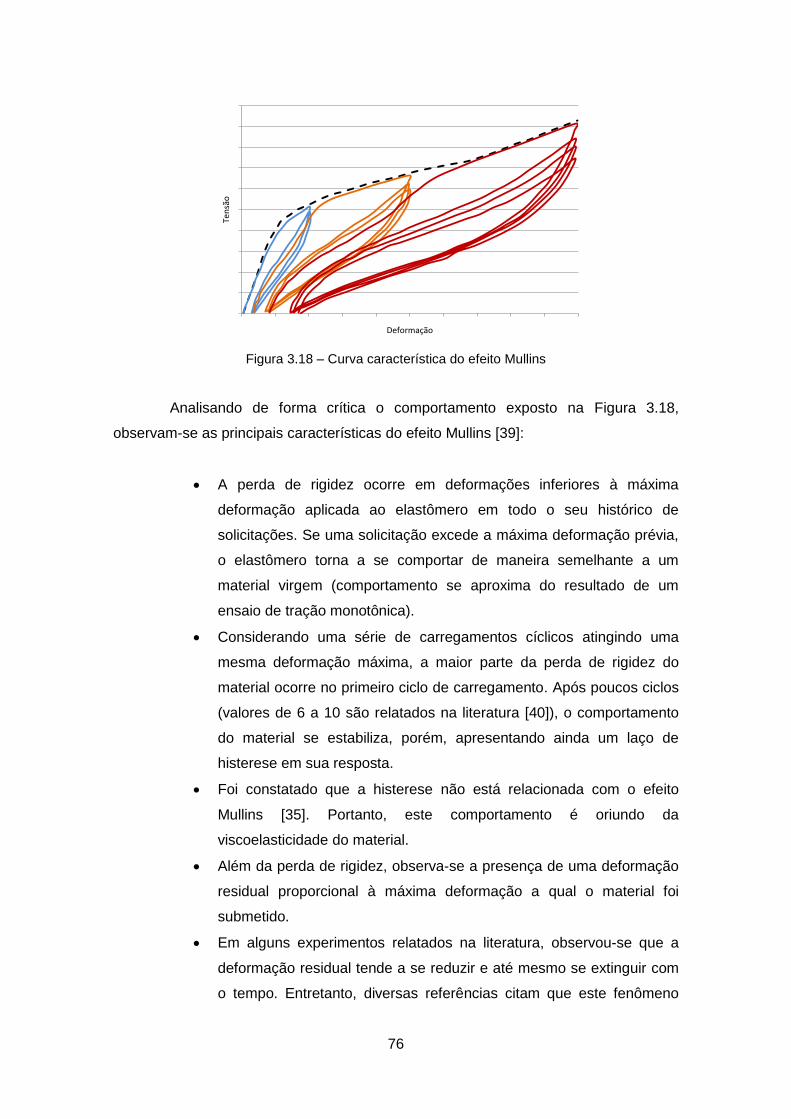
76
Figura 3.18 – Curva característica do efeito Mullins
Analisando de forma crítica o comportamento exposto na Figura 3.18,
observam-se as principais características do efeito Mullins [39]:
A perda de rigidez ocorre em deformações inferiores à máxima
deformação aplicada ao elastômero em todo o seu histórico de
solicitações. Se uma solicitação excede a máxima deformação prévia,
o elastômero torna a se comportar de maneira semelhante a um
material virgem (comportamento se aproxima do resultado de um
ensaio de tração monotônica).
Considerando uma série de carregamentos cíclicos atingindo uma
mesma deformação máxima, a maior parte da perda de rigidez do
material ocorre no primeiro ciclo de carregamento. Após poucos ciclos
(valores de 6 a 10 são relatados na literatura [40]), o comportamento
do material se estabiliza, porém, apresentando ainda um laço de
histerese em sua resposta.
Foi constatado que a histerese não está relacionada com o efeito
Mullins [35]. Portanto, este comportamento é oriundo da
viscoelasticidade do material.
Além da perda de rigidez, observa-se a presença de uma deformação
residual proporcional à máxima deformação a qual o material foi
submetido.
Em alguns experimentos relatados na literatura, observou-se que a
deformação residual tende a se reduzir e até mesmo se extinguir com
o tempo. Entretanto, diversas referências citam que este fenômeno
Ten
são
Deformação

77
não está diretamente relacionado com a viscoelasticidade do material
[39, 40, 41]. Em alguns elastômeros, também é observada
recuperação de rigidez.
O efeito Mullins é mais significativo em elastômeros que apresentem elevada
adição de carga (aditivos) em sua composição e em elastômeros que apresentem
alguma cristalização, como é o caso do elastômero de poliuretano (ver capítulo 3.1.1).
Apesar de o efeito Mullins ser conhecido há quase meio século, ainda não há um
consenso de qual é a origem física microscópica deste fenômeno [39].
Uma das teorias interpreta que a perda de rigidez ocorre devido à ruptura de
algumas cadeias da rede polimérica. Para explicar a teoria, é considerado que
determinadas regiões do material podem ser modeladas por diversas cadeias
poliméricas que compartilham os mesmos pontos em suas extremidades (ligações
cruzadas), e que estes pontos podem ser tratados como partículas rígidas.
Considerando uma deformação uniforme ao longo da direção formada pela linha
definida por estes dois pontos, a deformação microscópica se concentraria nas
cadeias de menor comprimento, e a depender da magnitude da deformação, estas
ligações poderiam vir a se romper. A Figura 3.19 ilustra esta teoria, onde a imagem à
esquerda representa a condição não deformada e a imagem à direita representa a
condição deformada.
Figura 3.19 – Teoria de origem física de efeito Mullins por ruptura de ligações [39]
Um dos pontos fracos apontados para esta teoria é que, se o efeito Mullins é
explicado por rupturas de cadeias, a deformação residual e perda de rigidez seriam
permanentes, e não recuperável.
Uma teoria semelhante à da ruptura de ligações é de que a ruptura ocorreria
na carga ou em um domínio cristalino, a depender da configuração microscópica do
elastômero. Entretanto, esta teoria tem o mesmo ponto fraco da hipótese de ruptura de
ligações, pois a perda de rigidez e a deformação residual oriunda do efeito Mullins não
seriam recuperáveis. A Figura 3.20 ilustra esta teoria, onde o aglomerado de círculos

78
pretos pode ser interpretado como carga ou domínio cristalino, a depender da
composição do elastômero:
Figura 3.20 – Teoria de origem física de efeito Mullins por ruptura de carga ou domínio
cristalino [39]
Uma teoria alternativa que explicaria a recuperação de rigidez e da
deformação residual é que o efeito Mullins seria interpretado microscopicamente pela
eliminação de interferências físicas da rede polimérica, ou seja, pela diminuição da
quantidade de cadeias emaranhadas. Como as cadeias poliméricas estão sujeitas a
agitação térmica, fornecendo tempo e/ou temperatura suficientes, estas interferências
físicas tornariam a ocorrer, justificando a recuperação das propriedades originais do
material. A Figura 3.21 ilustra esta teoria, onde a imagem à esquerda representa a
condição não deformada e a imagem à direita representa a condição deformada:
Figura 3.21 – Teoria de origem física de efeito Mullins por eliminação de interferência física da
rede polimérica [39]
Especificamente para o caso de elastômeros que apresentam domínios
cristalinos, como é o caso do elastômero de poliuretano, existe uma teoria em que,
sob a atuação de uma deformação macroscópica, a heterogeneidade do domínio
amorfo deste tipo de elastômero induziria rotações no domínio cristalino de tal forma
que suas dimensões mais alongadas ficassem orientadas na direção principal de
deformação. Estas rotações introduziriam deformações inelásticas ao sistema, isto é,
deformações residuais, além de consumirem uma parcela da energia de deformação
total do sistema. A Figura 3.22 ilustra esta teoria, onde a imagem à esquerda

79
representa a condição não deformada e a imagem à direita representa a condição
deformada.
Figura 3.22 – Teoria de origem física de efeito Mullins devido a rotação do domínio cristalino
Outra teoria especifica para elastômeros que apresentam domínios cristalinos
é de que existe uma separação incompleta entre os domínios cristalinos e o domínio
amorfo do material, sendo que uma parcela da parte amorfa do material está
inicialmente agregada ao domínio rígido. Quando o elastômero é submetido a uma
deformação, parte da região agregada é desprendida dos domínios rígidos, e esta não
linearidade microscópica causaria a perda de rigidez e a deformação residual,
comportamentos observados macroscopicamente pelo efeito Mullins.
Em uma abordagem diferente de todas as teorias anteriormente descritas,
com o objetivo de explicar o efeito Mullins por uma análise quantitativa e não
qualitativa, foi desenvolvida a teoria de padrão de auto-organização da cadeia
polimérica, na qual o comportamento do efeito Mullins é explicado por uma “complexa,
mas não complicada, interação entre as cadeias poliméricas, em que o atual
conhecimento do comportamento de uma única cadeia polimérica é considerado
essencial e suficiente” [41].
Nesta teoria, cada cadeia polimérica é representada por molas lineares,
sendo o elastômero modelado por interligações aleatórias de diversas molas
individuais. A não linearidade de resposta vem da consideração de que estas molas
podem se romper quando muito estendidas (ruptura de cadeia), e em alguns pontos
aleatórios, existe a possibilidade de que sejam criadas novas ligações (interferência
física). Modelos computacionais mostram que, embora cada elemento individual
apresente resposta linear e reversível, devido à heterogeneidade da cadeia polimérica
e a possibilidade de remover e criar novas ligações, o comportamento global segue
um novo padrão muito semelhante ao efeito Mullins observado em experimentos.

80
3.4.1. Abordagens para obtenção de modelos constitutivos de efeito Mullins
Semelhante às teorias constitutivas hiperelásticas, duas abordagens são
utilizadas para modelar o efeito Mullins: fenomenológica e macromolecular.
O modelo de Qi-Boyce é um exemplo de modelo macromolecular, sendo
considerado que a função densidade de energia de deformação é determinada
unicamente pela deformação dos domínios flexíveis do material. Com a aplicação de
um determinado nível de deformação, a fração volumétrica do domínio flexível é
alterada e isto implicaria no comportamento macroscópico observado do efeito Mullins
[42].
Conforme mencionado anteriormente, não existe uma unanimidade na
interpretação da origem física do efeito Mullins. Por esta razão, a maioria dos modelos
constitutivos apropriados para uso de engenharia é fenomenológica [39]. Entretanto,
autores que estudam a abordagem macromolecular argumentam que somente desta
maneira é possível modelar efetivamente o efeito Mullins, pois a abordagem
fenomenológica só pode ser eficiente se houverem dados experimentais disponíveis
de determinado material [41].
Com base no estado da arte do estudo sobre o efeito Mullins, serão
apresentados a seguir apenas modelos desenvolvidos com base na abordagem
fenomenológica, visto que estes são mais apropriados para descrever com eficácia um
elastômero cujo comportamento foi verificado por experimentos.
Usualmente, conforme será apresentado a seguir, os efeitos de perda de
rigidez e de deformação residual oriundo do efeito Mullins são tratados
separadamente, cada um por um parâmetro de dano independente.
3.4.2. Modelo de Ogden-Roxburgh de perda de rigidez por efeito Mullins
De acordo com as observações experimentais sobre o efeito Mullins, em uma
primeira solicitação até uma determinada deformação, o material tende ao
comportamento da teoria de hiperelasticidade, cujo comportamento é regido por uma
função densidade de energia de deformação “W ”. Para o modelo de Ogden-
Roxburgh, o modelo hiperelástico é considerado como o comportamento primário do
material.
Para carregamentos subsequentes em um nível de deformação igual ou
inferior à máxima deformação já aplicada, o modelo de Ogden-Roxburgh modifica a

81
energia de deformação do material para “W~
” através da incorporação de uma variável
escalar de dano “1 ”, tal qual apresentado na equação (3.171) [43]:
1111,~
FF WW (3.171)
O termo “1 ” representa o efeito da energia dissipada da perda de rigidez pelo
efeito Mullins. Desta forma, a energia de deformação do modelo de Ogden-Roxburgh é
pseudo-elástica, pois a energia de deformação “W~
” associada não corresponde
somente à energia de deformação elástica do material.
Analisando a atuação da variável de dano “1 ” na equação (3.171), observa-
se que seu valor deve ser unitário quando o material responde conforme o seu
comportamento primário, ou seja, quando não há influência do efeito Mullins. Além
disto, nesta condição, a função de energia dissipada “1 ” deve ser nula. Em termos
matemáticos, estas restrições são expressas equação (3.172):
011 (3.172)
Para que a energia de deformação “W~
” seja uma variável de estado válida, a
seguinte condição adicional é requerida [44]:
0
,~
1
1
FW (3.173)
Aplicando (3.171) em (3.173):
FW
d
d 11
1
11
(3.174)
Da equação (3.174), verifica-se implicitamente que a variável de dano “1 ”
depende somente do tensor gradiente de deformações “F” atuante no material, ou
seja, da deformação aplicada ao material.
De forma a compreender as restrições de “1 ”, será avaliado a seguir o caso
de um carregamento uniaxial, em que o gradiente de deformações “F” pode ser
definido como função apenas de seu estiramento principal característico “λ”.

82
Entretanto, as conclusões obtidas possuem validade para qualquer tipo de solicitação.
Para o caso de tração uniaxial, a equação (3.174) pode ser reescrita como:
W 11 (3.175)
Diferenciando a equação (3.175) em relação ao estiramento “λ”:
d
dW
d
d
d
d
1
11
d
dW
d
d
d
d
d
d
1
1
1
11
d
dW
d
d
d
d 1
2
1
11
2
d
dW
d
d 1
11 (3.176)
Conforme verificado anteriormente, “1 ” é unitário na ausência de atuação de
efeito Mullins. Em descarregamento, “1 ” deve ser decrescente de forma a reduzir o
efeito da solução hiperelástica, representando assim a perda de rigidez do material.
Interpretando este comportamento de maneira matemática, pode-se afirmar que
dd 1 é positivo. Como a energia de deformação do elastômero é diretamente
proporcional ao estiramento aplicado, ddW deve ser positivo. Aplicando estes
conceitos na equação (3.176) conclui-se que:
011 (3.177)
Com as restrições da função “1 ”, expressas pelas equações (3.174) e
(3.177), conclui-se que, além de depender apenas do tensor gradiente de
deformações “F”, a variável “1 ” é uma função decrescente contínua.
Se não há dano, o elastômero está submetido ao maior nível de deformação
em todo o seu histórico de solicitações e a variável de dano “1 ” deve ser unitária.

83
Definindo “Fmax” como o tensor gradiente de deformações de associado a este estado
de deformação e aplicando estes conceitos na equação (3.174):
max1 1 WW maxF (3.178)
Onde “Wmax” corresponde à máxima energia de deformação elástica à qual o
material já foi submetido. Uma conclusão importante da equação (3.178) é que a
função “1 ” depende da deformação máxima a que o material foi submetido.
Em outra análise de comportamento extremo, considerando o material
completamente descarregado, o tensor gradiente de deformações do material torna-se
o tensor identidade e a variável de dano “1 ” atinge seu valor mínimo “
min1 ”.
Aplicando estes conceitos na equação (3.174):
0min11 IW (3.179)
Se a equação (3.179) for integrada, conclui-se que “min1 ” é uma constante, e
em conjunto com o resultado da equação (3.178), conclui-se que “min1 ” também
depende da deformação máxima aplicada ao material em todo o seu histórico de
solicitações. Considerando esta situação de material descarregado na equação
(3.171):
min11min1min1,
~ II WW
min11min1,
~ IW (3.180)
Analisando o resultado da equação (3.180), como não há deformação
aplicada ao material e consequentemente não há parcela de energia de deformação
elástica, “ min11 ” pode ser interpretado como a energia necessária para danificar o
material pelo efeito Mullins.

84
Com base nas restrições das equações (3.172), (3.177) e (3.178) e de que a
variável de dano deve estar contida em 10 1 , uma função “1 ” deve ser escolhida
arbitrariamente. Para isto, será adotada a função de dano modificada de Ogden-
Roxburgh:
max1
1
max11 1 WrerfWn (3.181)
Onde “r”, “n” e “β” são propriedades materiais, sendo seus valores restritos a
1r , 0n e 0 . A função de dano de Ogden-Roxburgh é obtida considerando a
propriedade “β” nula [43], e por esta razão, a equação (3.181) foi denominada como
função de dano modificada. A função “erf-1” é o inverso da função erro, sendo definida
pela seguinte expressão:
x
w dweerf0
22
(3.182)
Aplicando (3.181) em (3.174) é obtida uma expressão para a variável escalar
de dano “1 ”:
max
max1
11
Wn
WWerf
r (3.183)
Para melhor compreensão da equação (3.183), o gráfico da Figura 3.23
mostra dois exemplos de atuação da variável escalar de dano “1 ”, cujo
comportamento depende dos parâmetros “r”, “n” e “β” adotados. Os resultados estão
apresentados em função da razão entre a energia de deformação instantânea do
material (W) e a máxima energia de deformação a qual o material já foi submetido
(Wmax).
Conforme descrito anteriormente, quando o material é submetido a uma
máxima energia de deformação (W/Wmax=1), a variável de dano “1 ” se torna unitária e
o elastômero retorna ao seu comportamento primário (solução hiperelástica). A
depender dos parâmetros adotados, a perda de rigidez pode ser progressiva com a
redução da razão “W/Wmax” (curva vermelha) ou apresentar uma perda de rigidez mais
acentuada para valores de “W/Wmax” próximos da unidade e um patamar de perda de
rigidez constante para razões “W/Wmax” com valores mais baixos (curva azul).

85
Figura 3.23 – Comportamento da variável de dano “η1” em função da energia de deformação do
elastômero
Utilizando o princípio dos trabalhos virtuais, as tensões principais do primeiro
tensor de Piola-Kirchhoff (σ) podem ser obtidas pela seguinte expressão:
i
i
W
~~ (3.184)
Aplicando (3.171) em (3.184):
i
i
W
1
~ (3.185)
Observa-se que a derivada no lado direito da equação (3.185) corresponde à
tensão da solução hiperelástica “σi”, cuja definição está apresentada na equação
(3.108). Desta forma, a relação entre a tensão da solução hiperelástica e do modelo
de Ogden-Roxburgh é definida pela própria variável de dano “1 ”:
ii 1~ (3.186)
Com o auxílio das equações (3.183) e (3.186), o comportamento do modelo
de Ogden-Roxburgh está apresentado, de maneira geral, no gráfico da Figura 3.24,
onde são aplicados três carregamentos cíclicos com deformação máxima progressiva.
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1
η_1
W/Wmax

86
Figura 3.24 – Comportamento característico do modelo de Ogden-Roxburgh
Analisando a Figura 3.24, observa-se que o modelo de Ogden-Roxburgh
possui as seguintes limitações:
Conforme discutido anteriormente, os efeitos de perda de rigidez e
deformação residual oriundos do efeito Mullins são tratados
separadamente. Desta forma, nenhuma deformação residual é
prevista pelo modelo de Ogden-Roxburgh.
Embora seja observada em experimentos, nenhuma histerese é
prevista pelo modelo. Isto é, o modelo de Ogden-Roxburgh descreve o
comportamento em equilíbrio do elastômero.
Analisando a definição da variável de dano “1 ”, equação (3.183), a
perda de rigidez depende apenas da máxima deformação a qual o
material foi submetido. Na realidade, existe uma progressão do dano
para carregamentos cíclicos em um mesmo nível de deformação,
sendo que o dano se estabiliza após poucos ciclos.
3.4.3. Modelos de deformação residual por efeito Mullins
Uma observação relevante sobre a deformação residual por efeito Mullins é
que sua magnitude é independente da taxa de carregamento, isto é, não provém de
fenômenos viscoelásticos. Além de observações experimentais [39, 40], este
comportamento foi constatado matematicamente pela teoria de padrão de auto-
organização da cadeia polimérica [41], em que apesar do modelo não conter nenhum
Ten
são
Deformação

87
termo dependente da taxa de carregamento, deformações residuais surgem
exclusivamente pelo rearranjo da cadeia polimérica.
Serão apresentadas a seguir duas abordagens para modelagem de
deformação residual pelo efeito Mullins. O modelo de Dorfmann-Ogden altera a
energia de deformação do material, semelhante ao estabelecido para o modelo de
Ogden-Roxburgh para perda de rigidez. A outra abordagem, a deformação residual é
descrita pelo critério de escoamento de von Mises com encruamento isotrópico linear,
semelhante à formulação utilizada para descrever a plasticidade de metais.
É importante ressaltar que, embora pareça impróprio modelar deformações
residuais de materiais elastoméricos por uma formulação desenvolvida para descrever
a plasticidade de metais, o critério de escoamento de von Mises é a formulação
adotada por renomados softwares de simulação numérica, como por exemplo, o
Abaqus.
3.4.3.1. Plasticidade isotrópica com encruamento linear
Nesta abordagem, a deformação residual é descrita pelo critério de
escoamento de von Mises, mesma formulação utilizada para determinar a plastificação
de materiais metálicos. Em uma representação unidimensional, um modelo de
plasticidade isotrópica é acoplado em série com um modelo elástico, que neste caso,
será considerado um modelo de Ogden-Roxburgh para solução hiperelástica sujeita a
perda de rigidez por efeito Mullins.
Figura 3.25 – Representação unidimensional do modelo de plasticidade para deformação
residual por efeito Mullins [45]
ii 1~
ND p

88
Formulando o modelo da Figura 3.25 em notação tensorial para um caso
tridimensional geral de solicitações, o tensor gradiente de deformações pode ser
decomposto como o produto do tensor de deformação pseudo-elástico (e
F ) e do
tensor de deformação plástica (p
F ):
peFFF (3.187)
É importante ressaltar que, neste caso, o comportamento de “e
F ” será regido
pelo modelo de Ogden-Roxburgh para inclusão de perda de rigidez pelo efeito Mullins.
Conforme exposto na Figura 3.25, o tensor taxa de estiramento plástico “p
D ” é
definido pela seguinte formulação:
NDp (3.188)
Onde “ ” é a lei de fluxo estabelecida constitutivamente e “N” é o tensor que
fornece a direção do incremento de deformação plástica.
Deformação plásticas ocorrem quando uma determinada solicitação é
superior à condição de escoamento de von Mises. Em termos matemáticos, a
plasticidade ocorre quando a função de escoamento “f” é nula, sendo definida pela
seguinte equação:
eqpeif ~ (3.189)
Onde “ i~ ” é a tensão do modelo de Ogden-Roxburgh e “ e ” a tensão de
escoamento, cujo valor é função da deformação plástica equivalente “eqp ”. Como foi
estabelecido modelo de encruamento linear, a tensão de escoamento é estabelecida
pela seguinte expressão:
eqpe H 0 (3.190)

89
Onde “σ0” e “H” são propriedades materiais. Para estabelecer um algoritmo
coerente para evolução de deformação residual, as condições de Kuhn-Tucker para o
caso de plasticidade isotrópica estão indicadas abaixo:
0eqp
0,~ eqpif
0,~ eqeq pip f (3.191)
3.4.3.2. Modelo de Dorfmann-Ogden
O modelo de Dorfmann-Ogden altera a energia de deformação do material
para “W~
” incluindo, além de uma variável escalar de dano “1 ” para perda de rigidez,
outra variável de dano “2 ” para inclusão dos efeitos de deformação residual [40].
Para que a energia de deformação “W~
” seja uma variável de estado válida,
as seguintes condições adicionais são requeridas:
0
,,~
1
21
FW (3.192)
0
,,~
2
21
FW (3.193)
Baseado nas restrições das equações (3.192) e (3.193), o modelo de
Dorfmann-Ogden propõe a seguinte expressão para a energia de deformação do
material para “W~
” do material:
22112121 1,,~
FFF NWW (3.194)
Onde “N” é uma função arbitrária para inclusão dos efeitos de deformação
residual e “ 2 ” representa o efeito da energia dissipada devido ao surgimento de
deformações residuais pelo efeito Mullins. É interessante notar que, se “2 ” for
definido como unitário, o modelo de Dorfmann-Ogden se reduz ao modelo de Ogden-
Roxburgh. Por esta razão, todos os termos dependentes de “1 ” não serão analisados
neste momento, pois a dedução é mesma da realizada no capítulo 3.4.2.

90
Aplicando (3.194) em (3.193), verifica-se implicitamente que a variável de
dano “2 ” depende somente do tensor gradiente de deformações “F”:
FN
d
d 22
2
22
(3.195)
Utilizando o princípio dos trabalhos virtuais, as tensões principais do primeiro
tensor de Piola-Kirchhoff (σ) podem ser obtidas pela seguinte expressão:
i
i
W
~~ (3.196)
Aplicando (3.194) em (3.196) e aplicando a definição da tensão da solução
hiperelástica “σi”, cuja expressão está apresentada na equação (3.108):
i
i
ii
i
NNW
2121 11~
(3.197)
Em um primeiro carregamento, não há influência do efeito Mullins e o
comportamento do elastômero corresponde ao seu comportamento primário (solução
hiperelástica), ou seja, 12 . Em um descarregamento, o efeito da deformação
residual começa a atuar e a função “N” deve ser ativada. Portanto, pode-se afirmar
que “2 ” deve ser decrescente com o descarregamento.
Para a situação descarregada ( 1i ), a tensão da solução hiperelástica “σi”
se torna nula e toda a tensão atuante provém da deformação residual. Por
conveniência, define-se que 02 quando não há deformação aplicada ao
elastômero.
Com os valores de “2 ” restritos para as condições de comportamento
primário (resultado hiperelástico), de descarregamento e para o material

91
descarregado, conclui-se que 10 2 . O modelo de Dorfmann-Ogden propõe a
seguinte expressão para a variável escalar de dano “2 ” [40]:
1tanh
tanh
max
max
2
W
W
W
(3.198)
Onde o expoente “α”, cujo valor é função da máxima energia de deformação
elástica a qual o material já foi submetido (Wmax), determina a contribuição de tensão
pela deformação residual para um determinado valor de “N(F)” na equação (3.197). A
seguinte expressão é proposta para o expoente “α”:
0
max
Wba (3.199)
Onde “a” e “b” são propriedades materiais e “µ0” é o módulo de cisalhamento
da equação constitutiva hiperelástica.
Para melhor compreensão da equação (3.198), o gráfico da Figura 3.26
mostra dois exemplos de atuação da variável escalar de dano “ 2 ”, cujo
comportamento depende dos parâmetros “a” e “b” e “µ0” adotados. Os resultados
estão apresentados em função da razão entre a energia de deformação instantânea
do material (W) e a máxima energia de deformação a qual o material já foi submetido
(Wmax).
Conforme descrito anteriormente, quando o material é submetido a uma
máxima energia de deformação (W/Wmax=1), a variável de dano “ 2 ” se torna unitária,
e para a situação de material descarregado (W/Wmax=0), “ 2 ” se torna nula, refletindo
total atuação das deformações residuais no comportamento do elastômero. Observa-
se da Figura 3.26 que o valor “ 2 ” tende a aumentar rapidamente para baixas razões
“W/Wmax”, e dependendo dos parâmetros adotados, o efeito das deformações
residuais é reduzido de maneira mais drástica (curva azul) ou de maneira mais suave
(curva vermelha).

92
Figura 3.26 – Comportamento da variável de dano “η2” em função da energia de deformação do
elastômero
Toda a formulação deduzida até o momento estabelece um comportamento
isotrópico para o material. Entretanto, com o surgimento de deformações residuais, é
evidente que uma determinada anisotropia é aplicada ao material. Com este propósito,
a função “N” deve ser arbitrada como uma função de energia de deformação
anisotrópica. O modelo de Dorfmann-Ogden propõe uma função de energia de
deformação Neo Hookeana modificada para refletir a anisotropia das deformações
residuais [40]:
1112
1,, 2
33
2
22
2
11321 vvvN (3.200)
Onde “ iv ” é um parâmetro material que inclui os efeitos anisotrópicos no
material. Seu valor depende do módulo de cisalhamento da equação constitutiva
hiperelástica “ 0 ”, e do máximo estiramento “ mi ” na direção correspondente:
1,0
1tanh
5,3
114,0 0
miiv
(3.201)
0
0,2
0,4
0,6
0,8
1
1,2
0 0,2 0,4 0,6 0,8 1 1,2η_2
W/Wmax

93
4. Caracterização experimental de elastômero de poliuretano para aplicação em Enrijecedores à Flexão
Serão apresentados a seguir uma série de ensaios experimentais para
caracterização do comportamento mecânico de um elastômero de poliuretano
específico para aplicação em Enrijecedores à Flexão. Foi analisado o comportamento
deste material em ensaios de tração, em diferentes taxas de carregamento, de forma a
levantar o comportamento visco-hiperelástico. Em seguida, foram realizados ensaios
cíclicos com o objetivo de caracterizar o efeito Mullins. Por último, de forma a verificar
a presença de uma tensão de escoamento no material, foram realizados ensaios
cíclicos em baixos níveis de deformação.
4.1. Material obtido para os ensaios
Amostras de elastômero de poliuretano foram obtidas com um fabricante de
Enrijecedores à Flexão na forma de placas com aproximadamente 2mm de espessura,
especificados por uma dureza Shore 60 D. O material foi moldado através de
derramamento livre (por gravidade) em um molde, processo semelhante ao realizado
para produção de um Enrijecedor à Flexão. O exemplo de uma das placas obtidas
está apresentado na foto da Figura 4.1.
Figura 4.1 – Placa de elastômero de poliuretano

94
Para realização dos ensaios, foi necessário confeccionar corpos de prova a
partir destas placas, sendo adotado o corpo de prova tipo I da norma ASTM D638 [46].
Para isto, duas das placas obtidas foram cortadas com auxílio de um cunho e uma
prensa hidráulica manual Carver, modelo 3912 (Figura 4.2).
Figura 4.2 – Corpo de prova obtido a partir de cunhagem da placa
Foi realizada uma identificação individual dos corpos de prova com base em
sua localização nas placas originais. Desta forma, é possível realizar uma eventual
interpretação de resultados baseadas na geometria original das amostras obtidas. A
Figura 4.3 mostra as identificações realizadas para a placa II. Notar que, com o
objetivo de identificar uma eventual anisotropia do material, foram obtidos corpos de
prova em direções perpendiculares entre si.
Figura 4.3 – Identificação de corpos de prova da placa II

95
4.2. Ensaios de tração monotônica
Uma série de ensaios de tração monotônica foram realizados com o objetivo
de avaliar o comportamento visco-hiperelástico do elastômero de poliuretano. Os
ensaios foram realizados no Laboratório de Ensaios Mecânicos do Instituto de
Macromoléculas (IMA) da UFRJ, utilizando equipamento de tração Instron modelo
5567, com capacidade de carga de 30kN. Como não haviam extensômetros
disponíveis, a deformação atuante nos corpos de prova foi mensurada baseando-se
no deslocamento de travessão do equipamento de tração.
Para garantir a repetibilidade dos ensaios, as amostras foram condicionadas
em 23°C com umidade relativa do ar em 50%. Evidentemente, o ideal seria ensaiar o
material em uma condição semelhante à de aplicação típica para um Enrijecedor à
Flexão (material saturado em água), entretanto, por não estarem disponíveis
equipamentos que permitissem a reprodução desta condição de uso, foi adotada as
condições acima citadas, correspondendo à atmosfera padrão de ensaio de materiais
poliméricos [47]. A Figura 4.4 mostra a montagem de um corpo de prova no
equipamento de tração:
Figura 4.4 – Ensaio de tração monotônica

96
Foram realizados ensaios em três velocidades distintas de travessão: 10, 150
e 500 mm/min. Apesar de nem todas as velocidades corresponderem ao recomendado
pela ASTM D638 (5, 50 e 500 mm/min), estes valores foram selecionados visando a
calibração de modelos apresentados no capítulo 3. Esta decisão está embasada na
própria ASTM D638, onde é afirmado que os ensaios de tração podem ser usados
para aplicação de engenharia desde que os testes sejam realizados com taxa de
carregamento correspondente ao uso real.
Os primeiros ensaios realizados foram os de 500mm/min, maior velocidade
prevista em norma [46], sendo os corpos de prova testados até que fosse obtida a
ruptura do material. De forma a verificar a presença de alguma anisotropia no
elastômero de poliuretano, foram testados corpos de prova retirados em direções
perpendiculares da placa original.
Nesta condição de ensaio, foram testados os corpos de prova II-7, II-8, II-9, II-
10, II-11, II-H-2, II-H-3, II-H-4, II-H-5 e II-H-6, sendo que aqueles que possuem
marcação “H” correspondem aos corpos de prova retirados perpendicularmente à
posição padrão adotada na placa, conforme pode ser visualizado na Figura 4.3. Os
resultados obtidos estão apresentados nos gráficos da Figura 4.5 (resultados
individuais de cada ensaio) e da Figura 4.6 (comportamento médio para as duas
direções perpendiculares do material).
Figura 4.5 – Resultados individuais de ensaio de tração monotônica. Velocidade de 500mm/min
0
10
20
30
40
50
60
0 % 50 % 100 % 150 % 200 % 250 % 300 % 350 % 400 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-7
II-8
II-9
II-10
II-11
II-H-2
II-H-3
II-H-4
II-H-5
II-H-6
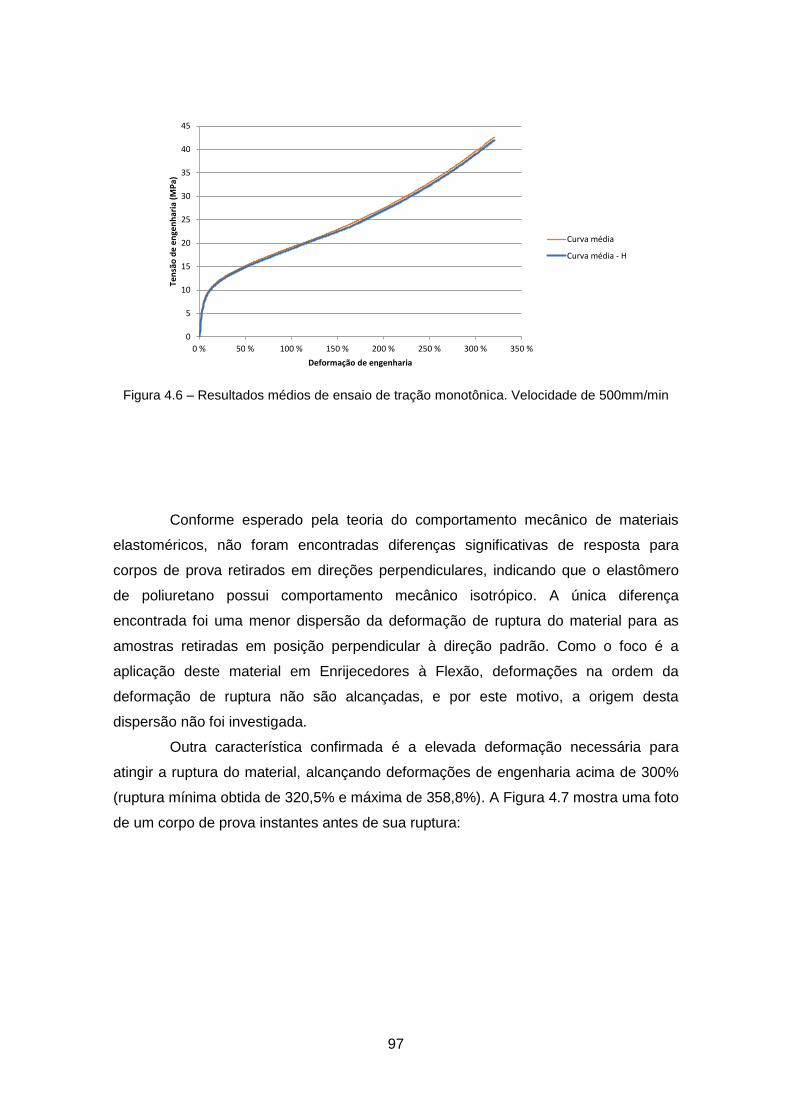
97
Figura 4.6 – Resultados médios de ensaio de tração monotônica. Velocidade de 500mm/min
Conforme esperado pela teoria do comportamento mecânico de materiais
elastoméricos, não foram encontradas diferenças significativas de resposta para
corpos de prova retirados em direções perpendiculares, indicando que o elastômero
de poliuretano possui comportamento mecânico isotrópico. A única diferença
encontrada foi uma menor dispersão da deformação de ruptura do material para as
amostras retiradas em posição perpendicular à direção padrão. Como o foco é a
aplicação deste material em Enrijecedores à Flexão, deformações na ordem da
deformação de ruptura não são alcançadas, e por este motivo, a origem desta
dispersão não foi investigada.
Outra característica confirmada é a elevada deformação necessária para
atingir a ruptura do material, alcançando deformações de engenharia acima de 300%
(ruptura mínima obtida de 320,5% e máxima de 358,8%). A Figura 4.7 mostra uma foto
de um corpo de prova instantes antes de sua ruptura:
0
5
10
15
20
25
30
35
40
45
0 % 50 % 100 % 150 % 200 % 250 % 300 % 350 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Curva média
Curva média - H

98
Figura 4.7 – Ensaio de tração instantes antes da ruptura do material
A Figura 4.8 mostra uma comparação de um corpo de prova rompido (após
cerca de três dias de relaxação para eliminação de efeitos viscoelásticos) com outro
ainda não testado. É possível observar que a forma final do corpo de prova ensaiado
pouco foi alterada em relação a sua geometria original, ocorrendo pouco alongamento
longitudinal e nenhuma estricção visível, indicando o baixo nível de deformação
permanente do elastômero de poliuretano, mesmo para as elevadas deformações que
este é submetido em ruptura. Este comportamento corresponde à expectativa pela
teoria de materiais elastoméricos.
Outro resultado que corresponde ao comportamento previsto em teoria é a
característica da superfície de fratura obtida, sendo obtida uma superfície lisa e
perpendicular ao esforço trativo, indicando a ocorrência de ruptura frágil.
Figura 4.8 – Comparação de corpo de prova rompido com outro não testado

99
Apesar de não ser uma condição prevista em norma [46], foram realizados
ensaios com velocidade de travessão de 150mm/min. Esta velocidade foi escolhida de
foram a submeter o material a uma taxa de deformação média entre o maior prevista
em norma (500 mm/min) e uma condição quase-estática de carregamento.
Como deformações elevadas não são alcançadas na aplicação em
Enrijecedores à Flexão e como velocidades de ensaio mais baixas tornam os ensaios
mais longos, para o ensaio em 150mm/min, o critério adotado para fim de teste foi a
obtenção de 30% de deformação de engenharia no corpo de prova, valor
suficientemente elevado para caracterização do comportamento do material.
Os corpos de prova II-12, II-13, II-14, II-16 e II-17 foram ensaiados com
velocidade de travessão de 150 mm/min. Os resultados obtidos estão apresentados no
gráfico da Figura 4.9:
Figura 4.9 – Resultados individuais de ensaio de tração monotônica. Velocidade de 150mm/min
Resultados experimentais disponíveis na literatura demonstram que o
comportamento do elastômero de poliuretano pouco é diferenciado em velocidades de
travessão entre 1,3 e 13 mm/min [48]. Portanto, de forma a obter resultados
consistentes e otimizando o tempo de ensaio, foi adotada velocidade de travessão de
10mm/min como uma condição representativa de uma solicitação quase-estática.
Nesta condição de ensaio, foram testados os corpos de prova II-18, II-19, II-20, II-21 e
II-22. Os resultados obtidos estão apresentados no gráfico da Figura 4.10:
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-12
II-13
II-14
II-16
II-17

100
Figura 4.10 – Resultados individuais de ensaio de tração monotônica. Velocidade de 10mm/min
O gráfico da Figura 4.11 mostra um resumo de todos os resultados obtidos
em ensaios de tração monotônica, no qual está apresentado o comportamento médio
obtido para cada velocidade de travessão adotada.
Figura 4.11 – Resultados obtidos dos ensaios de tração monotônica
4.3. Ensaios cíclicos
Uma série de ensaios cíclicos foram realizados com o objetivo de avaliar a
presença do efeito Mullins no elastômero de poliuretano. Estes ensaios também foram
realizados no Laboratório de Ensaios Mecânicos do Instituto de Macromoléculas (IMA)
da UFRJ, utilizando o mesmo equipamento adotado nos ensaios de tração monotônica
0
2
4
6
8
10
12
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-18
II-19
II-20
II-21
II-22
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min
150mm/min
500mm/min

101
(Instron modelo 5567, com capacidade de carga de 30kN) e corpos de prova tipo I da
norma ASTM D638 [46].
Assim como nos ensaios de tração monotônica, seria interessante ensaiar o
material em uma condição de aplicação do Enrijecedor à Flexão. Entretanto, pela
indisponibilidade de equipamento capaz de reproduzir o ambiente submarino, as
amostras foram condicionadas em 23°C com umidade relativa do ar em 50%,
atmosfera padrão de ensaio de materiais poliméricos [47]. Por serem condicionados
em uma mesma condição de temperatura e umidade, os resultados de tração
monotônica podem ser diretamente comparados com os resultados dos ensaios
cíclicos que serão apresentados a seguir.
Em cada ensaio, foram aplicados três ciclos de carregamento na qual a
deformação máxima aplicada aumenta gradativamente em incrementos de 10%,
retornando para a condição de deslocamento nulo do travessão ao fim do ciclo. No
último ciclo, foi atingida a deformação de engenharia 30%, correspondente ao valor
máximo de interesse definido nos ensaios monotônicos. O gráfico da Figura 4.12
apresenta o controle de deformação aplicado para os ensaios cíclicos:
Figura 4.12 – Programação de controle de deformação dos ensaios cíclicos – deformação
progressiva
A programação apresentada na Figura 4.12 indica apenas as deformações
aplicadas em cada ciclo, mas não a taxa de deformação imposta ao corpo de prova.
Por exemplo, não necessariamente o terceiro ciclo aplicará uma maior taxa de
deformação em relação ao primeiro ciclo, pois a abscissa do gráfico está definida em
ciclos, ou seja, uma grandeza atemporal. Portanto, para definir completamente as
0%
5%
10%
15%
20%
25%
30%
35%
0 1 2 3
De
form
ação
de
en
gen
har
ia
Ciclo

102
condições de um determinado ensaio, é necessário definir também a velocidade de
travessão adotada.
Para comparação direta com os ensaios de tração monotônica, as três
velocidades de travessão adotadas foram as mesmas destes primeiros ensaios, ou
seja, velocidades de 10, 150 e 500 mm/min.
O primeiro ensaio cíclico foi realizado em uma velocidade de travessão de
10mm/min. Neste ensaio, foram testados os corpos de prova II-1, II-2 e II-3, sendo o
resultado obtido apresentado no gráfico da Figura 4.13:
Figura 4.13 – Resultados individuais de ensaio cíclico – 10mm/min
Observa-se que a repetibilidade dos três corpos de prova ensaiados é
excelente, atestando que apesar do resultado obtido apresentar certa complexidade,
este corresponde ao comportamento da amostra de elastômero de poliuretano.
Ainda do gráfico da Figura 4.13, observa-se que não foi obtida uma condição
de material descarregado quando o travessão retorna para a sua posição original, ou
seja, não é obtida uma resposta mecânica caracterizada por uma deformação nula
associada a uma tensão nula.
A foto da Figura 4.14 mostra um corpo de prova com o travessão retornado
para sua posição inicial de ensaio, ou seja, em uma situação de deformação aplicada
nula. Como a deformação imposta é inferior à deformação residual do corpo de prova,
seria esperada a ocorrência de tensões compressivas no material. Entretanto, como o
corpo de prova possui uma geometria esbelta, observa-se a ocorrência de flambagem.
Portanto, os resultados do gráfico da Figura 4.13 não são válidos quando a
ocorrência de flambagem é verificada, pois este não caracteriza o comportamento
intrínseco do elastômero de poliuretano.
0
2
4
6
8
10
12
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-1
II-2
II-3

103
Figura 4.14 – Situação ao fim de ensaio cíclico – flambagem evidenciando a ocorrência de
deformações residuais no corpo de prova
Quando o corpo de prova é descarregado no primeiro ciclo e uma deformação
de aproximadamente 2,1% é atingida, a tensão associada no corpo de prova é nula,
correspondendo ao instante de início de flambagem. Durante o descarregamento do
segundo ciclo, a tensão associada foi nula em uma deformação de aproximadamente
4,7%. No terceiro ciclo, uma deformação de aproximadamente 7,3% foi obtida para um
estado de tensão nula. Interpretando o resultado obtido, estas deformações
associadas a estados de tensão nula representam possíveis deformações residuais
devido ao efeito Mullins associado a efeitos viscoelásticos.
Durante as etapas de recarregamento, as deformações associadas ao fim da
situação de flambagem (surgimento de tensões trativas no corpo de prova) são
bastante inferiores aos valores obtidos na condição de descarregamento. No início do
segundo ciclo, esforços trativos surgem em uma deformação de aproximadamente
1,3%, e no segundo ciclo, em uma deformação de aproximadamente 2,9%. Nestes
casos, efeitos viscoelásticos foram minimizados ou até mesmo eliminados, e esta
deformação está mais diretamente relacionada com a deformação residual oriunda do
efeito Mullins.
O gráfico da Figura 4.15 mostra, de maneira ampliada, o resultado obtido
para o ensaio cíclico em uma velocidade de travessão de 10mm/min (Figura 4.13) na
região onde há a ocorrência de flambagem e são identificadas as deformações
residuais. Com o resultado é semelhante para todos os corpos de prova, somente os

104
resultados para o corpo de prova II-1 estão apresentados na Figura 4.15. Neste
gráfico, está apresentada também a metodologia utilizada para determinar os valores
de deformação residual descritos anteriormente.
Figura 4.15 – Metodologia para determinação de deformações residuais – corpo de prova II-1
do ensaio cíclico em 10mm/min
Para as etapas de descarregamento, a curva “tensão-deformação” cruza o
eixo das abscissas, e o valor correspondente de deformação de engenharia foi
considerado como a deformação residual mensurada. Estes valores estão
identificados por círculos vermelhos na Figura 4.15.
Para as etapas de recarregamento, o comportamento do material é mais
instável, e a curva “tensão-deformação” não cruza o eixo das abscissas. Desta forma,
a deformação residual foi mensurada a partir de uma extrapolação linear da curva de
resposta do material no momento em que esta já apresentava um comportamento
estável de rigidez, indicando o fim da situação de flambagem do corpo de prova. Os
valores mensurados estão identificados por círculos verdes na Figura 4.15.
É importante ressaltar que, embora a metodologia descrita acima tenha sido
aplicada para o corpo de prova II-1, esta se aplica para todos os outros corpos de
prova e velocidades de travessão distintas, cujos resultados serão apresentados a
seguir.
De forma a verificar a influência dos efeitos viscosos nos resultados, foram
realizados ensaios em uma velocidade de travessão de 150mm/min. Neste ensaio,
foram testados os corpos de prova II-25, II-26 e II-27. Os resultados obtidos estão
apresentados no gráfico da Figura 4.16, sendo notável a pequena dispersão de
resultados com os diferentes corpos de prova, principalmente no valor de deformação
residual:
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 % 1 % 2 % 3 % 4 % 5 % 6 % 7 % 8 % 9 % 10 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-1

105
Figura 4.16 – Resultados individuais de ensaio cíclico – 150mm/min
Por fim, foram realizados ensaios em uma velocidade de travessão de
500mm/min. Neste ensaio, foram testados os corpos de prova II-31, II-32, II-33 e II-34.
Os resultados obtidos estão apresentados no gráfico da Figura 4.17, também
apresentando uma pequena dispersão de resultados, evidenciado que o resultado
corresponde ao comportamento da amostra de elastômero de poliuretano:
Figura 4.17 – Resultados individuais de ensaio cíclico – 500mm/min
Para verificar o efeito da taxa de carregamento dos ensaios cíclicos no
comportamento do elastômero de poliuretano, uma comparação do comportamento
médio de todos os resultados obtidos dos ensaios cíclicos é apresentada no gráfico da
Figura 4.18.
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-25
II-26
II-27
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-31
II-32
II-33
II-34

106
Figura 4.18 – Resultados obtidos dos ensaios cíclicos
A Tabela 4.1 apresenta o tempo total de cada ensaio com as respectivas
deformações residuais, tanto em carregamento como em descarregamento:
Tabela 4.1 – Tempo de ensaio e deformação residual dos ensaios cíclicos
Apesar da taxa de carregamento elevar consideravelmente a tensão aplicada
ao material, estando nitidamente associado ao comportamento viscoelástico, a
deformação residual possui pouca sensibilidade à taxa de carregamento. Desta forma,
existe uma forte indicação de que o efeito Mullins é o mecanismo causador das
deformações residuais.
O gráfico da Figura 4.19 mostra uma comparação da influência da
deformação máxima (eixo “x” inferior, em cor azul) e da tensão máxima (eixo “x”
superior, em cor vermelha) na deformação residual obtida nos ensaios:
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Δ10% - 10mm/min
Δ10% - 150mm/min
Δ10% - 500mm/min
1º ciclo 2º ciclo 3º ciclo 1º ciclo 2º ciclo 3º ciclo
II-1 - 1,30% 2,90% 2,07% 4,65% 7,20%
II-2 - 1,31% 2,98% 2,09% 4,69% 7,27%
II-3 - 1,32% 2,95% 2,09% 4,68% 7,29%
média - 1,31% 2,94% 2,08% 4,67% 7,26%
II-25 - 1,36% 3,10% 2,10% 4,86% 7,67%
II-26 - 1,35% 3,12% 2,13% 4,89% 7,68%
II-27 - 1,36% 3,09% 2,11% 4,93% 7,86%
média - 1,36% 3,10% 2,11% 4,89% 7,73%
II-31 - 1,63% 3,28% 2,13% 5,09% 8,14%
II-32 - 1,60% 3,31% 2,19% 5,21% 8,34%
II-33 - 1,58% 3,32% 2,16% 5,15% 8,24%
II-34 - 1,57% 3,30% 2,11% 5,03% 8,02%
média - 1,59% 3,30% 2,15% 5,12% 8,18%
10 mm/min 13min48s
150mm/min 55,2s
500mm/min 16,6s
Velocidade
de travessão
(mm/min)
Tempo de
ensaio (s)
Corpo
de prova
Deformação residual (carregamento) Deformação residual (descarregmento)

107
Figura 4.19 – Influência da deformação máxima e da tensão máxima na deformação residual
do elastômero de poliuretano
Observa-se que o dano no elastômero de poliuretano pode ser mensurado
majoritariamente pela deformação aplicada ao material, podendo ser desprezado o
efeito da taxa de carregamento, pois é obtida uma relação praticamente linear entre
deformação máxima aplicada e deformação residual obtida.
O mesmo procedimento não pode ser utilizado para associar a tensão
máxima aplicada ao material com a deformação residual obtida, pois esta relação é
fortemente dependente da taxa de carregamento aplicada ao material. Por exemplo,
no descarregamento, uma tensão aplicada de aproximadamente 10 MPa pode causar
uma deformação residual de 2,1% ou 7,3%, a depender da taxa de carregamento que
foi aplicada. Já no recarregamento, uma amostra que foi submetida a uma tensão
máxima de aproximadamente 9 Mpa pode causar uma deformação residual de 1,3%
ou 2,9%, dependendo da taxa de carregamento.
Este resultado é bastante interessante, pois indica que os mecanismos de
dano estão muito mais associados com a deformação a qual o material é submetido
do que a tensão aplicada ao mesmo, ratificando que este fenômeno é oriundo do
efeito Mullins.
Para corroborar a hipótese da presença do efeito Mullins, o gráfico da Figura
4.20 apresenta uma comparação direta dos resultados dos ensaios cíclicos (linhas
cheias) com os ensaios de tração monotônica (linhas tracejadas). Nesta comparação,
pode ser constatado que quando a máxima deformação prévia é excedida, o
7 8 9 10 11 12 13
1%
3%
5%
7%
9%
10% 15% 20% 25% 30%
Tensão máxima (MPa)
De
form
ação
re
sid
ual
Deformação máxima
emáx (carregamento)
emáx (descarregamento)
σmáx (carregamento)
σmáx (descarregamento)
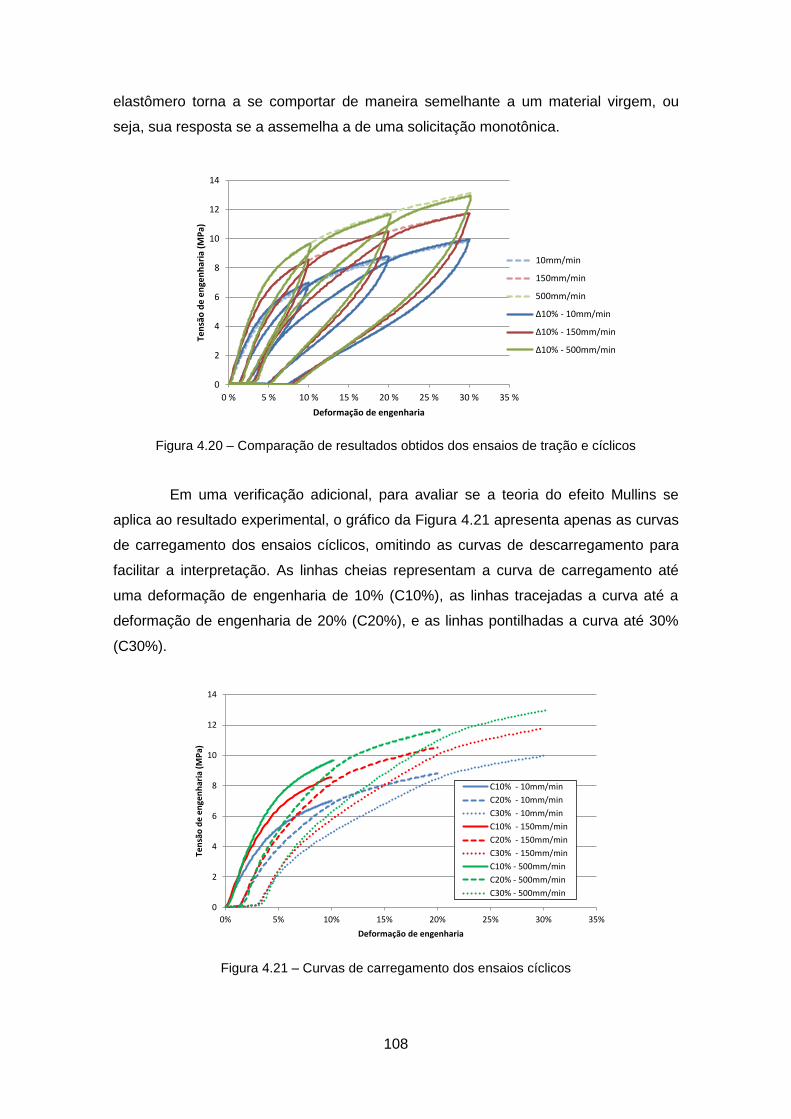
108
elastômero torna a se comportar de maneira semelhante a um material virgem, ou
seja, sua resposta se a assemelha a de uma solicitação monotônica.
Figura 4.20 – Comparação de resultados obtidos dos ensaios de tração e cíclicos
Em uma verificação adicional, para avaliar se a teoria do efeito Mullins se
aplica ao resultado experimental, o gráfico da Figura 4.21 apresenta apenas as curvas
de carregamento dos ensaios cíclicos, omitindo as curvas de descarregamento para
facilitar a interpretação. As linhas cheias representam a curva de carregamento até
uma deformação de engenharia de 10% (C10%), as linhas tracejadas a curva até a
deformação de engenharia de 20% (C20%), e as linhas pontilhadas a curva até 30%
(C30%).
Figura 4.21 – Curvas de carregamento dos ensaios cíclicos
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min
150mm/min
500mm/min
Δ10% - 10mm/min
Δ10% - 150mm/min
Δ10% - 500mm/min
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30% 35%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
C10% - 10mm/min
C20% - 10mm/min
C30% - 10mm/min
C10% - 150mm/min
C20% - 150mm/min
C30% - 150mm/min
C10% - 500mm/min
C20% - 500mm/min
C30% - 500mm/min
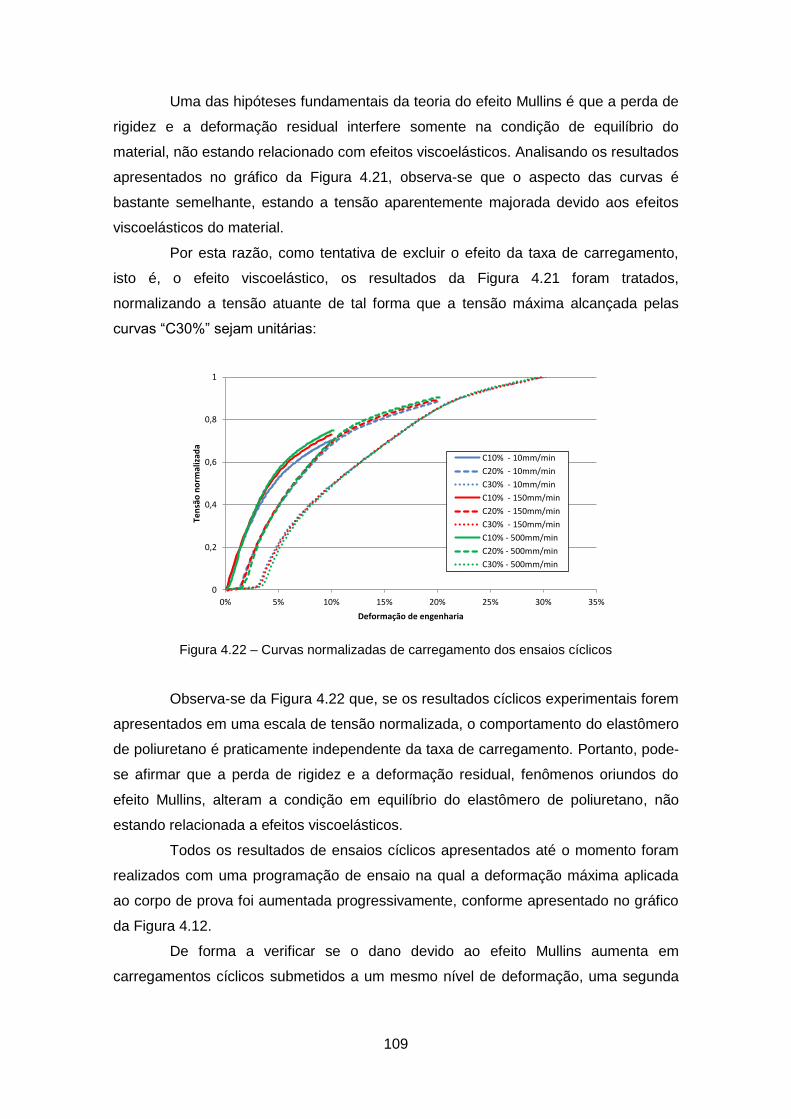
109
Uma das hipóteses fundamentais da teoria do efeito Mullins é que a perda de
rigidez e a deformação residual interfere somente na condição de equilíbrio do
material, não estando relacionado com efeitos viscoelásticos. Analisando os resultados
apresentados no gráfico da Figura 4.21, observa-se que o aspecto das curvas é
bastante semelhante, estando a tensão aparentemente majorada devido aos efeitos
viscoelásticos do material.
Por esta razão, como tentativa de excluir o efeito da taxa de carregamento,
isto é, o efeito viscoelástico, os resultados da Figura 4.21 foram tratados,
normalizando a tensão atuante de tal forma que a tensão máxima alcançada pelas
curvas “C30%” sejam unitárias:
Figura 4.22 – Curvas normalizadas de carregamento dos ensaios cíclicos
Observa-se da Figura 4.22 que, se os resultados cíclicos experimentais forem
apresentados em uma escala de tensão normalizada, o comportamento do elastômero
de poliuretano é praticamente independente da taxa de carregamento. Portanto, pode-
se afirmar que a perda de rigidez e a deformação residual, fenômenos oriundos do
efeito Mullins, alteram a condição em equilíbrio do elastômero de poliuretano, não
estando relacionada a efeitos viscoelásticos.
Todos os resultados de ensaios cíclicos apresentados até o momento foram
realizados com uma programação de ensaio na qual a deformação máxima aplicada
ao corpo de prova foi aumentada progressivamente, conforme apresentado no gráfico
da Figura 4.12.
De forma a verificar se o dano devido ao efeito Mullins aumenta em
carregamentos cíclicos submetidos a um mesmo nível de deformação, uma segunda
0
0,2
0,4
0,6
0,8
1
0% 5% 10% 15% 20% 25% 30% 35%
Ten
são
no
rmal
izad
a
Deformação de engenharia
C10% - 10mm/min
C20% - 10mm/min
C30% - 10mm/min
C10% - 150mm/min
C20% - 150mm/min
C30% - 150mm/min
C10% - 500mm/min
C20% - 500mm/min
C30% - 500mm/min

110
programação de ensaio foi realizada em que três ciclos são aplicados até uma
deformação prescrita de 30%, conforme indicado no gráfico da Figura 4.23.
Figura 4.23 – Programação de controle de deformação dos ensaios cíclicos – deformação
máxima cíclica
Neste ensaio, foram realizados ensaios apenas com velocidade de travessão
de 150 mm/min, onde foram testados os corpos de prova II-28, II-29 e II-30. Os
resultados obtidos estão apresentados no gráfico da Figura 4.24.
Figura 4.24 – Resultados individuais de ensaio cíclico com deformação máxima cíclica –
150mm/min
Assim como nos ensaios anteriores, foi obtida uma ótima repetibilidade dos
resultados com diferentes corpos de prova, reafirmando que o resultado obtido é
representativo do comportamento da amostra de elastômero de poliuretano. Observa-
0%
5%
10%
15%
20%
25%
30%
35%
0 1 2 3
De
form
ação
de
en
gen
har
ia
Ciclo
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-28
II-29
II-30

111
se que, conforme previsto pela teoria do efeito Mullins, o dano no material tende a
aumentar ao decorrer de ciclos em um mesmo nível de deformação.
4.4. Investigação da presença de tensão de escoamento
Com os resultados obtidos nos ensaios monotônicos, apresentados no
capítulo 4.2, observou-se que o elastômero de poliuretano apresenta comportamento
não linear e dependente da taxa de carregamento. Em seguida, os ensaios cíclicos
apresentados no capítulo 4.3 mostraram que, além de não linear, a resposta deste
material está sujeita a perda rigidez e deformações residuais pelo efeito Mullins.
Em um material idealmente não linear elástico, a resposta em carregamento
ou descarregamento deve permanecer inalterada e, evidentemente, sem o surgimento
de deformações residuais no material. Portanto, o limite do comportamento elástico do
material ocorre quando ao menos alguma destas duas características deixa de ser
observada, e este ponto seria definido como a tensão de escoamento do material, ou
no caso de elastômeros, o ponto onde o efeito Mullins começa a atuar.
De forma a verificar a existência de uma tensão de escoamento no
elastômero de poliuretano, foram realizados novos ensaios cíclicos com deformação
progressiva, porém em um nível de deformação bastante inferior ao realizado
anteriormente, conforme apresentado no gráfico da Figura 4.25:
Figura 4.25 – Programação de controle de deformação para verificação de tensão de
escoamento
0%
1%
2%
3%
4%
5%
6%
7%
0 1 2 3 4 5 6
De
form
ação
de
en
gen
har
ia
Ciclo

112
Pode-se notar na programação apresentada na Figura 4.25 que a deformação
aplicada ao corpo de prova não retorna para a situação neutra, mas sim para uma
deformação prescrita de 0,5%. Esta metodologia foi adotada para evitar instabilidades
que seriam esperadas no material quando o travessão retornasse para sua posição
inicial de ensaio.
Estes ensaios foram realizados com o mesmo equipamento e condições dos
ensaios anteriores (Instron modelo 5567 no IMA-UFRJ, com corpos de ASTM D638
tipo I, em 23°C com umidade relativa do ar em 50%), em velocidade de travessão de
10mm/min para redução dos efeitos viscoelásticos, onde foram testados os corpos de
prova II-4, II-5 e II-6. Os resultados obtidos estão apresentados no gráfico da Figura
4.26.
Figura 4.26 – Resultados individuais de ensaio cíclico para verificação de tensão de
escoamento – 10mm/min
Assim como nos ensaios monotônicos e cíclicos, foi obtida uma ótima
repetibilidade com diferentes corpos de prova, reafirmando que o resultado obtido é
representativo do comportamento da amostra de elastômero de poliuretano.
Mesmo para deformações bastante pequenas em relação à capacidade de
estiramento de materiais elastoméricos, efeitos dissipativos ocorrem e deformações
residuais são observadas.
Portanto, com base nos resultados apresentados, pode-se concluir que o
elastômero de poliuretano não possui uma tensão de escoamento significativa, ou
seja, o efeito Mullins se faz presente mesmo para solicitações relativamente baixas.
0
1
2
3
4
5
6
7
0 % 1 % 2 % 3 % 4 % 5 % 6 % 7 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
II-4
II-5
II-6

113
5. Identificação de parâmetros para modelagem de elastômero de poliuretano
Com base nas teorias necessárias para descrever o comportamento
mecânico de materiais elastoméricos (Capítulo 3) e com os experimentos realizados
com amostras de elastômero de poliuretano utilizado na confecção de Enrijecedores à
Flexão (Capítulo 4), será realizado a seguir a identificação dos parâmetros
necessários para estabelecer o comportamento mecânico deste elastômero
específico.
Evidentemente, quanto mais características do comportamento do material
forem necessárias ser estimadas de uma única vez, mais difícil será identificar os
parâmetros que melhor representam o comportamento do elastômero de poliuretano.
Por esta razão, a correlação entre teoria e experimento será realizada gradativamente,
ou seja, uma característica do material só será incorporada ao modelo quando outra
for completamente identificada por parâmetros adequados.
5.1. Parâmetros de modelo hiperelástico
Uma das hipóteses para formulação de um modelo hiperelástico é que a
tensão atuante no material é função apenas da deformação instantânea, independente
do histórico ou da taxa de carregamento. Entretanto, observa-se dos resultados
experimentais que a tensão depende tanto do histórico de carregamento quanto da
taxa de aplicação de carga.
Analisando os resultados experimentais de maneira crítica, verifica-se que a
dependência da taxa de carregamento é oriunda de efeitos viscoelásticos. Dos
ensaios cíclicos, conclui-se que a perda de rigidez e o surgimento de deformações
residuais estão claramente ligados ao efeito Mullins.
Apesar do modelo hiperelástico não ser suficiente para descrever
completamente o comportamento do elastômero de poliuretano, se for considerada
uma aplicação de carga monotônica suficientemente lenta, a resposta desta
solicitação específica pode ser modelada por equações hiperelásticas. Os ensaios de
tração realizados em uma velocidade de travessão de 10mm/min, cujos resultados
estão apresentados na Figura 4.11, podem ser utilizados como referência para
identificar os parâmetros de equações hiperelásticas para o elastômero de poliuretano.
Definindo “λ” como o estiramento característico da tração uniaxial e
considerando o material incompressível e isotrópico, o tensor gradiente de

114
deformações “F” e o tensor de Cauchy-Green à esquerda “B” podem ser definidos da
seguinte maneira:
2/1
2/1
00
00
00
F (5.1)
1
1
2
00
00
00
B (5.2)
De acordo com a equação (3.109), a primeira tensão de Piola-Kirchhoff obtida
no ensaio uniaxial pode ser obtida pela seguinte expressão:
1
2
21
1
1
1
I
I
WI
I
W (5.3)
Os valores de “λi” para o caso de tração uniaxial estão definidos em (5.1).
Aplicando estes valores nas equações (3.101) e (3.105), onde são definidos o primeiro
e o segundo invariante do tensor de Cauchy-Green à esquerda, obtém-se:
22
1 I (5.4)
21
22 I (5.5)
Derivando as equações (5.4) e (5.5) em relação à “λ”:
2
1 12
I (5.6)
3
2 112
I (5.7)

115
Aplicando (5.6) e (5.7) em (5.3):
2
21
1
112
I
W
I
W (5.8)
Desta forma, a equação (5.8) descreve a primeira tensão de Piola-Kirchhoff
(ou tensão de engenharia) em função apenas do estiramento característico da tração
uniaxial e da função densidade de energia de deformação, podendo ser adotada
qualquer uma das propostas no capítulo 3.2.
Aplicando a função densidade de energia de deformação do modelo Neo
Hookeano, representada pela equação (3.112), na equação (5.8), obtém-se uma
relação entre a tensão e o estiramento para este modelo:
2101
12
C (5.9)
Observa-se que o resultado obtido na equação (5.9), por tratamento
fenomenológico, é idêntico ao obtido pela equação (3.76), resultado obtido por
tratamento termodinâmico estatístico.
Aplicando a função densidade de energia de deformação do modelo de
Mooney-Rivlin, representada pela equação (3.115), na equação (5.8), obtém-se uma
relação entre a tensão e o estiramento para este modelo:
2
01101
12
CC (5.10)
Aplicando a função densidade de energia de deformação do modelo de
Ogden, representada pela equação (3.116), na equação (5.8), e considerando “N=6”,
obtém-se uma relação entre a tensão e o estiramento para este modelo:
1
21
6
61
21
1
11
6
6
1
122
(5.11)

116
Aplicando a função densidade de energia de deformação do modelo de Yeoh,
representada pela equação (3.117), na equação (5.8), obtém-se uma relação entre a
tensão e o estiramento para este modelo:
2
2
2
30
2
20101
13
233
222
CCC (5.12)
Aplicando a função densidade de energia de deformação do modelo
Polinomial, representada pela equação (3.118), na equação (5.8), e considerando
“N=3”, obtém-se uma relação entre a tensão e o estiramento para este modelo:
2211
2
2001
101
111133
222
CC
CC
2
2
2
30302
13
23
13222
CC
232
23
21
181833218652
C
2432
2
12
156183231882
C
2
2
2
03 132
132
C
(5.13)
Aplicando a função densidade de energia de deformação do modelo
Polinomial Reduzido, representada pela equação (3.119), na equação (5.8), e
considerando “N=6”, obtém-se uma relação entre a tensão e o estiramento para este
modelo:
2
2
2
30
2
20101
13
233
222
CCC
2
4
2
50
3
2
40
13
253
242
CC
2
5
2
60
13
262
C
(5.14)

117
Aplicando a função densidade de energia de deformação do modelo de
Arruda-Boyce, representada pela equação (3.89), na equação (5.8), e truncando a
soma infinita em cinco termos, obtém-se uma relação entre a tensão e o estiramento
para este modelo:
2
2
2
4
2
21
12
350
112
10
1
2
12
LL
G
2
4
2
8
3
2
6
12
134750
5192
1750
192
LL
G
(5.15)
Com base nas soluções dos diferentes modelos hiperelásticos para o caso de
tração uniaxial, os parâmetros destes modelos serão estimados utilizando o método
dos mínimos quadrados, onde se busca minimizar a soma dos quadrados das
diferenças entre uma solução genérica e valores de referência.
Neste caso, a solução genérica corresponde às equações hiperelásticas,
enquanto que o valor de referência é o resultado experimental de tração uniaxial
monotônica realizado com velocidade de travessão de 10mm/min, cujos resultados
estão apresentados no gráfico da Figura 4.11.
Para aferir os modelos hiperelásticos, seus resultados precisam ser
expressos nas mesmas grandezas físicas do ensaio de tração uniaxial. O resultado
experimental está expresso em tensão e deformação de engenharia. A tensão de
engenharia corresponde à primeira tensão de Piola-Kirchhoff e, portanto, modelo e
experimento apresentam a mesma medida para esta grandeza física. A deformação
de engenharia “e” é definida de acordo com a equação (5.16)
0
0
L
LLe
(5.16)
O estiramento “λ”, utilizado como medida de deformação nos modelos
hiperelásticos, é definida na equação (3.74). Aplicando (5.16) em (3.74), é obtida uma
expressão relacionando “λ” com a deformação de engenharia “e”:
e1 (5.17)
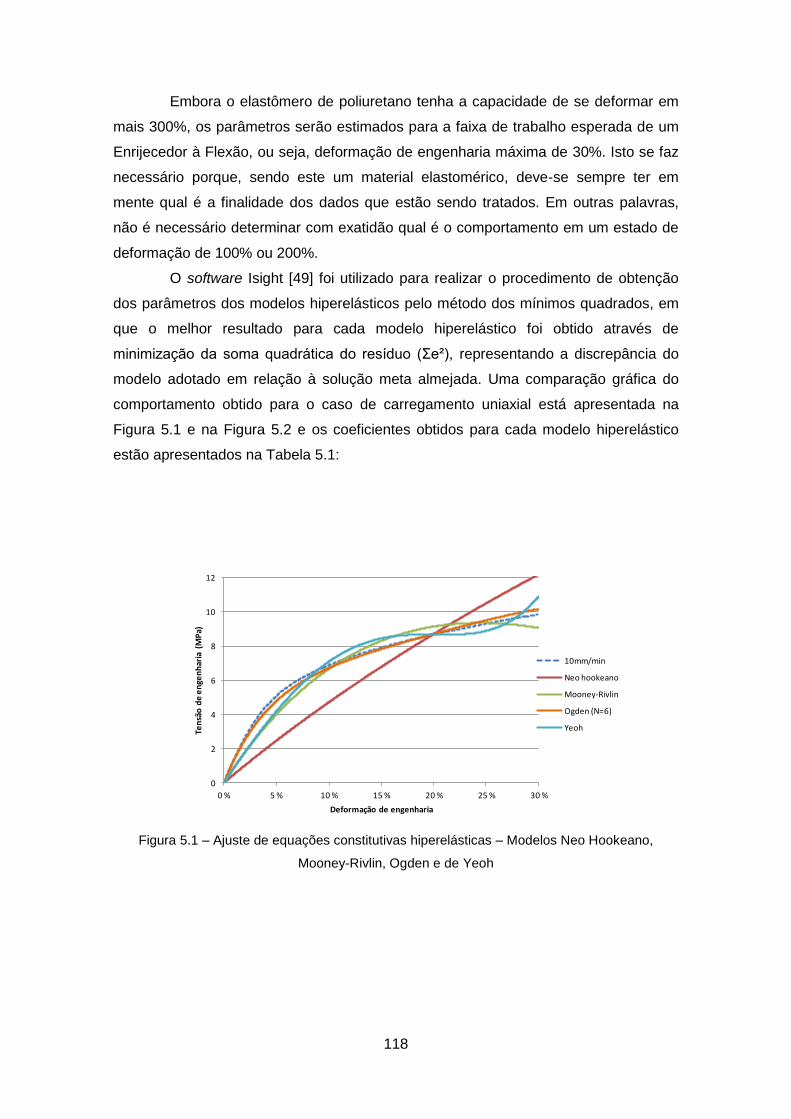
118
Embora o elastômero de poliuretano tenha a capacidade de se deformar em
mais 300%, os parâmetros serão estimados para a faixa de trabalho esperada de um
Enrijecedor à Flexão, ou seja, deformação de engenharia máxima de 30%. Isto se faz
necessário porque, sendo este um material elastomérico, deve-se sempre ter em
mente qual é a finalidade dos dados que estão sendo tratados. Em outras palavras,
não é necessário determinar com exatidão qual é o comportamento em um estado de
deformação de 100% ou 200%.
O software Isight [49] foi utilizado para realizar o procedimento de obtenção
dos parâmetros dos modelos hiperelásticos pelo método dos mínimos quadrados, em
que o melhor resultado para cada modelo hiperelástico foi obtido através de
minimização da soma quadrática do resíduo (Σe²), representando a discrepância do
modelo adotado em relação à solução meta almejada. Uma comparação gráfica do
comportamento obtido para o caso de carregamento uniaxial está apresentada na
Figura 5.1 e na Figura 5.2 e os coeficientes obtidos para cada modelo hiperelástico
estão apresentados na Tabela 5.1:
Figura 5.1 – Ajuste de equações constitutivas hiperelásticas – Modelos Neo Hookeano,
Mooney-Rivlin, Ogden e de Yeoh
0
2
4
6
8
10
12
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min
Neo hookeano
Mooney-Rivlin
Ogden (N=6)
Yeoh

119
Figura 5.2 – Ajuste de equações constitutivas hiperelásticas – Modelos Polinomial (“N=2” e
“N=3”), Polinomial Reduzido e de Arruda-Boyce
Tabela 5.1 – Coeficientes dos modelos hiperelásticos obtidos pelo método dos mínimos
quadrados
De maneira geral, os modelos Neo Hookeano e de Arruda-Boyce, ambos
obtidos por tratamento termodinâmico estatístico, foram que forneceram os resultados
mais inadequados para representar o comportamento do elastômero de poliuretano na
faixa de interesse (deformação de engenharia de até 30%), apresentando função
resíduo “Σe²” com valores bastante semelhantes. Portanto, com base nos modelos
hiperelásticos avaliados, conclui-se que o tratamento fenomenológico é mais
adequado para descrever o comportamento do elastômero investigado neste estudo.
0
2
4
6
8
10
12
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min
Polinomial (N=2)
Polinomial (N=3)
Poli Reduzido (N=6)
Arruda-Boyce
C10 8,6027 C10 -25,32 µ1 16,793 C10 15,226 C10 -76,18 C10 -2,798 C10 16,597 G 17,188
- - C01 41,223 α1 -23,95 C20 -44,05 C01 97,358 C01 19,196 C20 -71,43 λL 100,1
- - - - µ2 1,5506 C30 80,37 C20 36,064 C20 -10,81 C30 250,03 - -
- - - - α2 -16,6 - - C11 15,327 C11 -12,81 C40 -285 - -
- - - - µ3 22,033 - - C02 -44,85 C02 -13,58 C50 -194,2 - -
- - - - α3 -19,56 - - - - C30 22,459 C60 -17,69 - -
- - - - µ4 23,798 - - - - C21 19,536 - - - -
- - - - α4 -17,49 - - - - C12 17,429 - - - -
- - - - µ5 -32,04 - - - - C03 15,98 - - - -
- - - - α5 10,611 - - - - - - - - - -
- - - - µ6 19,152 - - - - - - - - - -
- - - - α6 -15,7 - - - - - - - - - -
Σe²
Arruda
Boyce
135,3633813 240,1500694 5548,942311
Polinomial
Reduzido
(N=6)
Polinomial
(N=3)
369,5844851
Parâmetros
5548,898538 628,5060215 67,68114004 511,6401042
Neo
Hookeano
Mooney
Rivlin
Ogden
(N=6)Yeoh
Polinomial
(N=2)

120
Dos modelos fenomenológicos, o mais simples é o Mooney-Rivlin. Apesar de
ser obtido um comportamento superior em relação às equações constitutivas
desenvolvidas a partir de tratamento termodinâmico estatístico, este modelo ainda não
é capaz de representar o elastômero de poliuretano de maneira satisfatória,
representado matematicamente por uma função resíduo “Σe²” com valor bastante
elevado.
Excelentes resultados foram obtidos com o modelo de Ogden para “N=6”.
Uma dificuldade observada na estimativa de parâmetros deste modelo foi que todos os
termos da equação (5.11) possuem a mesma forma geral. À vista disto, se for utilizado
como estimativa inicial valores idênticos para “μi” e para “αi”, a lógica de otimização do
software Isight encontra soluções para estes coeficientes com valores idênticos. Desta
forma, ao contrário dos demais modelos hiperelásticos estudados, a escolha da
estimativa inicial tem grande influência na minimização da função resíduo. Também
foram estimados parâmetros do modelo de Ogden para “N=3”, entretanto o
comportamento obtido foi bastante inferior ao obtido com “N=6” e os resultados não
serão apresentados neste trabalho.
A utilização do modelo de Yeoh forneceu resultados razoáveis. É interessante
observar que o modelo de Yeoh é equivalente ao modelo Polinomial Reduzido para
“N=3”, e o uso deste modelo hiperelástico com “N=6” forneceu resultados
aprimorados, mas ainda inferior em relação ao comportamento obtido com o modelo
de Ogden.
A aplicação do modelo Polinomial mostrou um resultado interessante: o
modelo obtido com “N=2” apresentou melhor concordância com o resultado
experimental que o obtido com “N=3”. Como a própria nomenclatura deste modelo
indica, o ajuste do modelo é obtido por uma expressão polinomial, e deste modo, não
necessariamente a utilização de mais parâmetros trará uma melhor resposta ao
modelo, pois parâmetros adicionais podem ser desnecessários e apenas adicionam
ruído à solução proposta.
Além de verificar a aplicabilidade de um determinado modelo hiperelástico
para representar o comportamento mecânico do elastômero de poliuretano, é
igualmente necessário verificar se a equação constitutiva obtida apresenta
estabilidade para prover solução única a um problema de valor de contorno em
mecânica do contínuo. Em termos físicos, uma solução é encontrada para o problema
realizando o equilíbrio do trabalho exercido por cargas externas com a energia interna
de deformação do material. Se a energia de deformação reduz com o acréscimo de
carga, o equilíbrio energético não será alcançado e não será obtida uma solução para
o sólido deformado [28].

121
Esta condição de estabilidade é verificada pelo critério de estabilidade de
Drucker, obtido pelo produto interno do tensor incremental de tensões de Cauchy com
o tensor incremental de deformações real no material:
0: εσ r
(5.18)
No caso de tração uniaxial, o critério de estabilidade de Drucker é violado se
a tensão aplicada no material reduz em uma deformação trativa ou se a tensão
aumenta em uma deformação compressiva [28]. Desta forma, para o caso de
solicitação uniaxial, o critério de estabilidade pode ser formulado pela seguinte
inequação diferencial:
01
d
d r (5.19)
Os resultados dos modelos hiperelásticos expostos na Figura 5.1 e na Figura
5.2 estão apresentados em termos de tensão e deformação de engenharia e, portanto,
não podem ser aplicados diretamente na inequação (5.19). A relação entre tensão de
Cauchy com a tensão de engenharia (ou primeira tensão de Piola-Kirchhoff) é
fornecida pela equação (3.110). Aplicando o tensor gradiente de deformações
característico do caso de tração uniaxial, expresso pela equação (5.1), é obtida a
seguinte expressão para a tensão de Cauchy para este caso de carregamento:
er 1 (5.20)
A deformação real, ou deformação logarítmica, é definida pela seguinte
expressão:
0
lnL
L (5.21)
Aplicando a definição da deformação de engenharia, expressa na equação
(5.16), na equação (5.21), é obtida uma relação entre estas duas medidas de
deformação:
1ln e (5.22)

122
Aplicando as equações (5.21) e (5.22) nos modelos hiperelásticos adotados
como candidatos para descrever o comportamento do elastômero de poliuretano em
tração uniaxial, pode-se aplicar as expressões obtidas no critério de estabilidade para
este caso de carregamento, inequação (5.19). A análise de estabilidade dos modelos
hiperelásticos está apresentada nos gráficos da Figura 5.3 e da Figura 5.4, assim
como a comparação com o resultado experimental quando aplicado o critério de
Drucker.
É importante observar que, por ser um resultado experimental e não uma
expressão matemática, o critério de Drucker aplicado ao experimento foi obtido por
uma aproximação numérica da inequação (5.19), e por esta razão, a curva obtida não
é suave como a obtida a partir dos modelos hiperelásticos.
Figura 5.3 – Análise de estabilidade dos modelos hiperelásticos – Modelos Neo Hookeano,
Mooney-Rivlin, Ogden e de Yeoh
Figura 5.4 – Análise de estabilidade dos modelos hiperelásticos – Modelos Polinomial (“N=2” e
“N=3”), Polinomial Reduzido e de Arruda-Boyce
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 % 5 % 10 % 15 % 20 % 25 %
dσ/d
ε
Deformação real
Neo hookeano
Mooney-Rivlin
Ogden (N=6)
Yeoh
10mm/min
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 % 5 % 10 % 15 % 20 % 25 %
dσ/d
ε
Deformação real
Polinomial (N=2)
Polinomial (N=3)
Poli Reduzido (N=6)
Arruda Boyce
10mm/min

123
Analisando o critério apresentado pela inequação (5.19), a única equação
hiperelástica que violou o critério de estabilidade foi o modelo de Mooney-Rivlin, ainda
assim para deformações relativamente elevadas em relação à aplicação estudada do
material para Enrijecedores à Flexão (deformação de engenharia de 28,21% ou
deformação real de 24,85%).
Além de analisar se o critério de estabilidade de Drucker é valido para o
modelo hiperelástico, também é necessário verificar se o comportamento obtido
corresponde ao observado no ensaio experimental.
Na faixa de interesse de deformação de engenharia de 30% (ou deformação
real de aproximadamente 26,2%, conforme apresentado nos gráficos), o elastômero
de poliuretano apresenta uma maior rigidez em pequenas deformações, sendo esta
grandeza reduzida com o acréscimo de deformação. A partir de uma deformação real
de aproximadamente 15%, a rigidez do material se torna praticamente constante.
A única equação hiperelástica que apresentou a capacidade de reproduzir
este comportamento de rigidez do material foi o modelo de Ogden com “N=6”. Todos
os outros modelos apresentaram comportamento de rigidez instável com o acréscimo
de deformação, ora reduzindo, ora aumentando a rigidez. A única exceção foram os
modelos Neo Hookeano e de Arruda-Boyce, embora já houvesse sido analisado que
estes modelos não forneciam predição razoável do campo de tensões do elastômero
de poliuretano.
Com base nas avaliações acima sobre o comportamento das equações
hiperelásticas estudadas, o modelo que melhor representa o elastômero de
poliuretano para aplicação em Enrijecedores à Flexão é o modelo de Ogden com
“N=6”. Para verificar melhor a boa correlação obtida deste modelo, a Figura 5.5 mostra
apenas o comportamento obtido pelo modelo de Ogden com “N=6” frente aos
resultados experimentais.

124
Figura 5.5 – Modelo hiperelástico de Ogden – equação hiperelástica adotada para descrever o
comportamento do elastômero de poliuretano
É importante ressaltar que os parâmetros do modelo de Ogden com “N=6”
foram estimados para deformações de engenharia de até 30%, e não há garantia de
que os parâmetros estimados apresentem comportamento estável (critério de
estabilidade de Drucker) ou que represente dados experimentais para deformações
trativas mais elevadas ou em deformações compressivas.
Além disto, os parâmetros hiperelásticos foram estimados apenas pelo ensaio
de tração uniaxial. Desta forma, existe a possibilidade de que esta única referência
experimental não seja suficiente para estabelecer o comportamento do elastômero em
um estado triaxial de tensões. Para conhecer melhor o comportamento do material em
uma solicitação qualquer, seria interessante realizar também ensaios de tensão
biaxial, na qual a amostra seria submetida a um estado de tensões um pouco mais
complexo.
5.2. Parâmetros de modelo viscoelástico não-linear
Conforme discutido no capítulo 3.3, o modelo viscoelástico que melhor
representa o comportamento de materiais elastoméricos é o modelo de Bergstrom-
Boyce e, portanto, este será adotado para descrever o comportamento transiente do
elastômero de poliuretano.
Definindo “λ” como o estiramento característico da tração uniaxial e
considerando o material incompressível e isotrópico, o tensor gradiente de
0
2
4
6
8
10
12
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min
Ogden (N=6)

125
deformações e o tensor de Cauchy-Green à esquerda podem ser definidos da
seguinte maneira:
2/1
2/1
00
00
00
F (5.23)
1
1
2
00
00
00
B (5.24)
Desta forma, o tensor inverso de “F”:
2/1
2/1
1
1
00
00
00
F (5.25)
Diferenciando “F” em relação ao tempo:
2/32
1
2/32
1
2/1
2/1
00
00
00
00
00
00
dt
dFijF (5.26)
Aplicando (5.25) e (5.26) na definição do tensor gradiente de velocidade,
equação (3.150):
12
1
12
1
1
1
00
00
00
FFL (5.27)
É importante observar que está sendo estudado um caso particular de
aplicação do modelo de Bergstrom-Boyce sob uma solicitação uniaxial. Desta forma,
assim como em todo o modelo, cada elemento mecânico, representado de maneira
unidimensional na Figura 3.15, também está submetido a uma solicitação uniaxial e,
portanto, as equações (5.23), (5.24), (5.25), (5.26) e (5.27) também são válidas para
subdomínios do modelo. Será adotado “ ” como o estiramento aplicado em todo
.
.

126
modelo (ou nos domínios “A” e “B”), “v
B ” como o estiramento aplicado ao elemento
viscoso do domínio “B” e “e
B ” como o estiramento aplicado ao elemento elástico do
domínio “B”.
Aplicando estas definições na equação (3.157), onde é descrita a
decomposição multiplicativa de deformação do modelo de Bergstrom-Boyce, é obtida
a relação entre “ ”, “v
B ” e “e
B ”:
v
B
e
BB FFF
2/1
2/1
2/1
2/1
2/1
2/1
00
00
00
00
00
00
00
00
00
v
B
v
B
v
B
e
B
e
B
e
B
v
B
e
B (5.28)
A taxa de deformação atuante no elemento viscoso do modelo de Bergstrom-
Boyce é fornecida pela seguinte equação:
B
v
B NDv
B~
(5.29)
Onde “NB” representa o tensor que fornece a direção para a configuração
relaxada do elastômero, sendo determinado pela seguinte equação:
B
B
rdev
rdev
Bσ
σN
2
3 (5.30)
Como o caso estudado é uma tração uniaxial, o tensor de tensões de Cauchy
no domínio “B” (Brσ ) pode ser definido como:
000
000
00Br
Brσ (5.31)

127
O tensor deviatórico de tensões de Cauchy atuante no domínio “B” (Brdevσ )
pode ser determinado pela seguinte expressão [31]:
B
B
B
r
r
r
31
31
32
00
00
00
3
1BBB rrrdev σσσ (5.32)
A magnitude de “Brdevσ ” é definida pela equação (3.153). Aplicando (5.32) em
(3.153):
Br
Ttr 3
2
Brdevrdevdev σσσBB
(5.33)
Aplicando (5.32) e (5.33) em (5.30):
B
B
B
B
B
B
r
r
r
r
r
r
6
100
06
10
003
2
2
3
2
3
B
B
rdev
rdev
Bσ
σN (5.34)
Como o caso analisado está sendo modelado de maneira unidimensional,
apenas o componente “NB11” pode ser considerado para a solução do problema:
B
B
r
r
BN
11 (5.35)

128
Conforme apresentado na equação (3.165), “v
BD~
” é a parte simétrica do
tensor gradiente de velocidade “v
BL~
”, que por sua vez é definido pela equação (3.162).
Aplicando (5.23), (5.25) e (5.27) em (3.162):
1~ e
B
v
B
e
B
v
B FLFL
1
1
21
1
21
1
2/1
2/1
00
00
00
00
00
00~
e
B
v
B FLv
B
v
B
v
B
v
B
v
B
v
B
e
B
e
B
e
B
2/1
2/1
1
12/1
21
12/1
21
1
00
00
00
00
00
00~
e
B
e
B
e
B
v
B
v
B
e
B
v
B
v
B
e
B
v
B
v
B
e
B
v
BL
v
B
v
B LL
v
B
v
B
v
B
v
B
v
B
v
B
1
21
1
21
1
00
00
00~
(5.36)
Aplicando (5.36) em (3.165):
v
B
v
B
v
B
v
Bv
B LLLL
D
~
00
00
00
22
1
2
~~~
1
21
1
21
1
v
B
v
B
v
B
v
B
v
B
v
BT
(5.37)
Como o caso analisado está sendo modelado de maneira unidimensional,
apenas o componente “11
~ v
BD ” pode ser considerado para a solução do problema:
v
B
v
B
v
BD 1
11
~ (5.38)

129
Aplicando (5.35) e (5.38) em (5.29), é obtida a expressão descreve a taxa de
deformação no elemento viscoso do modelo de Bergstrom-Boyce para o caso de
solicitação unidimensional:
B
B
r
rv
B
v
B
v
B
1 (5.39)
Isolando “v
B ”, é obtida a evolução do estiramento no elemento viscoso em
relação ao tempo:
B
B
r
rv
B
v
B
v
Bv
Bdt
d
(5.40)
O único termo restante a detalhar na equação (5.40) é “v
B ”, que representa a
taxa de deformação viscosa, sendo determinado pela seguinte equação:
mB
Ccr
B
v
B EA 1 (5.41)
Onde “cr
B ” representa o estiramento de fluência do domínio “B”, sendo
determinado pela equação (3.169). Aplicando (5.24) em (3.169):
v
B
v
B
cr
B tr
2
3
1
3
1 2v
BB (5.42)
Na equação (5.41), “B ” representa a tensão efetiva atuante no domínio “B”,
sendo determinada pela equação (3.170). Aplicando (5.32) em (3.170):
222
3
1
3
1
9
4
2
3:
2
3BBB rrrB
BB rdevrdev σσ
BrB (5.43)

130
Aplicando (5.42) e (5.43) em (5.41):
m
r
C
v
B
v
B
v
B BEA
1
2
3
1 2 (5.44)
Portanto, a evolução de deformação no elemento viscoso “v
B ” em relação ao
tempo é definida associando as equações (5.40) e (5.44). Como “ ” é diretamente
obtida pela deformação total aplicada ao elastômero e “v
B ” é definido pelas leis de
evolução estabelecidas acima, pode-se determinar “e
B ” a partir da equação (5.28):
v
B
e
B
(5.45)
O domínio “A” do modelo de Bergstrom-Boyce representa o comportamento
do material em equilíbrio. A equação constitutiva hiperelástica que melhor representa o
comportamento do elastômero de poliuretano em equilíbrio é o modelo de Ogden com
“N=6”. Portanto, a função densidade de energia de “WA” deste domínio é estabelecida
por esta equação constitutiva com coeficiente tais quais identificados na Tabela 5.1.
Por fim, a tensão no domínio “A” é obtida associando “WA” ao estiramento “ ”
aplicado.
A função de densidade de energia do domínio “B” (WB) é estabelecida
conforme apresentado na equação (5.46) em função do fator de escala de tensão “S”.
A tensão no domínio “B” é obtida associando “WB” ao estiramento “e
B ” aplicado.
AB SWW (5.46)
Por fim, a tensão total atuante no modelo é determinada como a soma das
tensões atuante nos domínios “A” e “B”, tal qual descrito na equação (3.154).
Assim como para a identificação dos parâmetros hiperelásticos, os ensaios
experimentais de tração apresentados na Figura 4.11 serão utilizados como referência
para identificar o comportamento viscoelástico do elastômero de poliuretano.
Nesta etapa, os resultados com velocidade de travessão de 10mm/min foram
considerados como representativos de uma solicitação infinitamente lenta, sendo,
portanto, considerados como o comportamento em equilíbrio do material. Os

131
resultados com velocidade de travessão de 150mm/min e 500mm/min serão
considerados como referência para solicitações em taxa de deformação finita.
Evidentemente, a velocidade de travessão “v” não é uma medida de taxa
deformação aplicável para a análise do material. A relação entre velocidade de
travessão dos ensaios com a taxa de deformação de engenharia ( e ) aplicada ao
modelo pode ser obtida pela equação (5.47):
060L
ve (5.47)
Como foi utilizado o corpo de prova tipo I da norma ASTM D638 [46], o
comprimento inicial da amostra (L0) é de 115mm. Utilizando a equação (5.47), a taxa
de deformação aplicada ao modelo está apresentada na Tabela 5.2:
Tabela 5.2 – Taxa de deformação de engenharia em função da velocidade de travessão do
ensaio
A equação (5.17) estabelece a relação entre o estiramento e a deformação de
engenharia. Derivando esta expressão em relação ao tempo:
e (5.48)
Com posse de todas as informações apresentadas acima, as propriedades
materiais “S”, “A”, “C” e “m” do comportamento viscoelásticos podem ser identificados
para o caso do elastômero de poliuretano. A constante de estabilização “E” não será
considerada como variável, sendo arbitrado o valor recomendado de 0,01 [37].
O software Isight [49] foi utilizado para realizar o procedimento de obtenção
dos parâmetros do modelo viscoelástico de Bergstrom-Boyce pelo método dos
mínimos quadrados, em que um conjunto de constantes materiais é estimado através
de minimização da soma quadrática do resíduo (Σe²) de cada uma das três referencias
listadas acima. A Figura 5.6 mostra uma comparação gráfica do comportamento obtido
pelo modelo (linhas cheias) com os resultados experimentais (linhas tracejadas) e
também com a solução hiperelástica que serve de referência como o comportamento
10mm/min 0,0014
150mm/min 0,022
500mm/min 0,072
Velocidade
de travessão (mm/min)
Taxa de deformação
de engeharia (1/s)

132
em equilíbrio do elastômero de poliuretano. Os coeficientes característicos da solução
obtida estão apresentados na Tabela 5.3:
Figura 5.6 – Ajuste do modelo viscoelástico de Bergstrom-Boyce
Tabela 5.3 – Coeficientes do modelo viscoelástico de Bergstrom-Boyce obtido pelo método dos
mínimos quadrados
5.3. Parâmetros de modelo de efeito Mullins
De acordo com a literatura, o efeito Mullins afeta apenas o comportamento
em equilíbrio dos elastômeros, não estando relacionado com fenômenos
viscoelásticos. Os experimentos realizados constataram que esta hipótese é aplicável
para o caso específico do elastômero de poliuretano, pois normalizando a tensão
atuante, o comportamento obtido é praticamente independente da taxa de
carregamento aplicada, conforme apresentado no gráfico da Figura 4.22.
Desta forma, não é necessário identificar parâmetros considerando a variação
da taxa de carregamento, mas somente em uma única condição de ensaio do
elastômero de poliuretano. Por conveniência, será utilizada como referência apenas as
curvas de carregamento do ensaio com velocidade de travessão de 10mm/min,
conforme indicado no gráfico da Figura 5.7. Com esta referência, o comportamento
primário do elastômero (ver definição no capítulo 3.4.2) corresponde à equação
constitutiva hiperelástica, não sendo necessário modelar, neste momento, qualquer
efeito viscoelástico do material.
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
hiperelástico
10 mm/min
150 mm/min
500 mm/min
Modelo 10
Modelo 150
Modelo 500
Fator de Escala de tensão
"S"
Parâmetro de Fluência
"A"
Constante de
Estabilização "E"
Expoente de deformação
de fluência "C"
Expoente de tensão
efetiva "m"
0,553925567 0,000644242 0,01 -0,682234773 1,089747282

133
Figura 5.7 – Referência experimental para identificação de parâmetros para modelo de efeito
Mullins
Apesar da perda de rigidez e a deformação residual serem tratadas por
formulações matemáticas independentes, como ambos os fenômenos são
provenientes do efeito Mullins, a identificação de parâmetros será realizada
simultaneamente para os dois comportamentos.
Para o efeito de perda de rigidez, a única formulação proposta foi o modelo
de Ogden-Roxburgh, na qual a energia de deformação do elastômero é modificada de
acordo com a seguinte equação:
1111,~
FF WW (5.49)
Onde “1 ” é uma variável escalar de dano para modelar o efeito da perda de
rigidez do elastômero, cujo valor é definido pela seguinte equação:
max
max1
11
Wn
WWerf
r (5.50)
“Wmax” corresponde à máxima energia de deformação elástica à qual o
material foi submetido em todo o seu histórico de solicitações e “W ” é a energia de
deformação elástica instantânea a qual o material está submetido.
Conforme apresentado no capítulo 5.1, o modelo de Ogden com “N=6” é a
equação constitutiva hiperelástica que melhor descreve o comportamento do
0
2
4
6
8
10
12
0% 5% 10% 15% 20% 25% 30% 35%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
C10% - 10mm/min
C20% - 10mm/min
C30% - 10mm/min

134
elastômero de poliuretano, cuja energia de deformação é definida pela equação
(3.116). Além disso, para uma solicitação de tração uniaxial, o tensor gradiente de
deformações “F” é definido pela equação (5.1). Associando ambas as equações,
obtém-se a energia de deformação do modelo de Ogden com “N=6” a ser utilizada
para identificação de parâmetros para o modelo de Ogden-Roxburgh:
6
12
322
21
i i
i iiW
(5.51)
Aplicando a equação (5.51) em conjunto com os parâmetros estabelecidos na
Tabela 5.1 na equação (5.50), os parâmetros “r”, “n” e “β” podem ser identificados para
o caso do elastômero de poliuretano.
Para o efeito de deformação residual, uma das formulações propostas é
descrever este fenômeno pelo critério de escoamento de von Mises com encruamento
isotrópico linear. Desta maneira, a tensão na qual ocorre evolução de deformação
residual, o que corresponderia a tensão de escoamento da formulação de von Mises, é
estabelecida pela seguinte expressão:
eqpe H 0 (5.52)
Onde “σe” é a tensão de escoamento e “σ0” e “H” são propriedades materiais,
representando a tensão de escoamento inicial e o módulo plástico, respectivamente.
Com base nos resultados experimentais apresentados no gráfico da Figura
5.7, é possível obter dois pares de dados de “tensão atuante” versus “deformação
residual” obtida: a tensão máxima atingida ao fim do primeiro carregamento produz a
deformação residual observada no segundo ciclo de carregamento, sendo a mesma
relação para a máxima tensão atingida no segundo ciclo e a deformação residual
constatada para o terceiro ciclo. Os dados obtidos dos experimentos estão
apresentados na Tabela 5.4:
Tabela 5.4 – Dados experimentais de “tensão de escoamento” versus “deformação residual”
Condição de escoamentoTensão de escoamento
"σe"
Deformação residual
"εpeq"
fim 1º ciclo 7,01 MPa 1,28%
fim 2º ciclo 8,81 MPa 3,00%
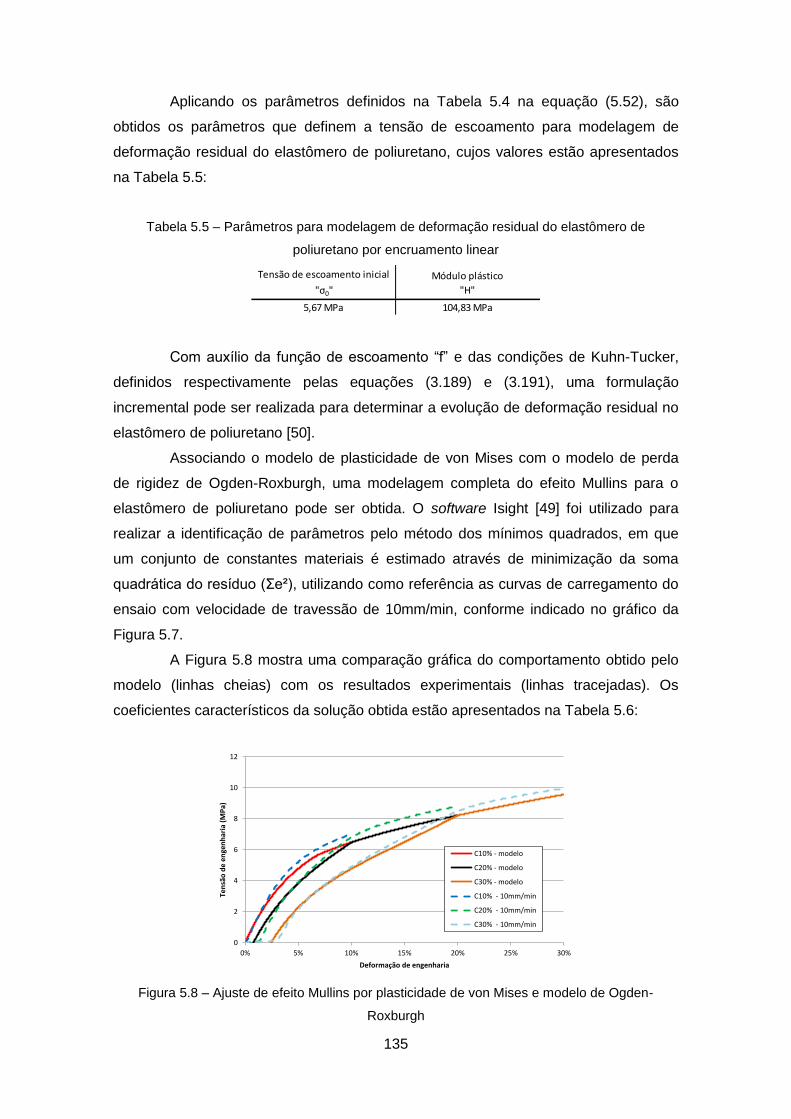
135
Aplicando os parâmetros definidos na Tabela 5.4 na equação (5.52), são
obtidos os parâmetros que definem a tensão de escoamento para modelagem de
deformação residual do elastômero de poliuretano, cujos valores estão apresentados
na Tabela 5.5:
Tabela 5.5 – Parâmetros para modelagem de deformação residual do elastômero de
poliuretano por encruamento linear
Com auxílio da função de escoamento “f” e das condições de Kuhn-Tucker,
definidos respectivamente pelas equações (3.189) e (3.191), uma formulação
incremental pode ser realizada para determinar a evolução de deformação residual no
elastômero de poliuretano [50].
Associando o modelo de plasticidade de von Mises com o modelo de perda
de rigidez de Ogden-Roxburgh, uma modelagem completa do efeito Mullins para o
elastômero de poliuretano pode ser obtida. O software Isight [49] foi utilizado para
realizar a identificação de parâmetros pelo método dos mínimos quadrados, em que
um conjunto de constantes materiais é estimado através de minimização da soma
quadrática do resíduo (Σe²), utilizando como referência as curvas de carregamento do
ensaio com velocidade de travessão de 10mm/min, conforme indicado no gráfico da
Figura 5.7.
A Figura 5.8 mostra uma comparação gráfica do comportamento obtido pelo
modelo (linhas cheias) com os resultados experimentais (linhas tracejadas). Os
coeficientes característicos da solução obtida estão apresentados na Tabela 5.6:
Figura 5.8 – Ajuste de efeito Mullins por plasticidade de von Mises e modelo de Ogden-
Roxburgh
Tensão de escoamento inicial
"σ0"
Módulo plástico
"H"
5,67 MPa 104,83 MPa
0
2
4
6
8
10
12
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
C10% - modelo
C20% - modelo
C30% - modelo
C10% - 10mm/min
C20% - 10mm/min
C30% - 10mm/min
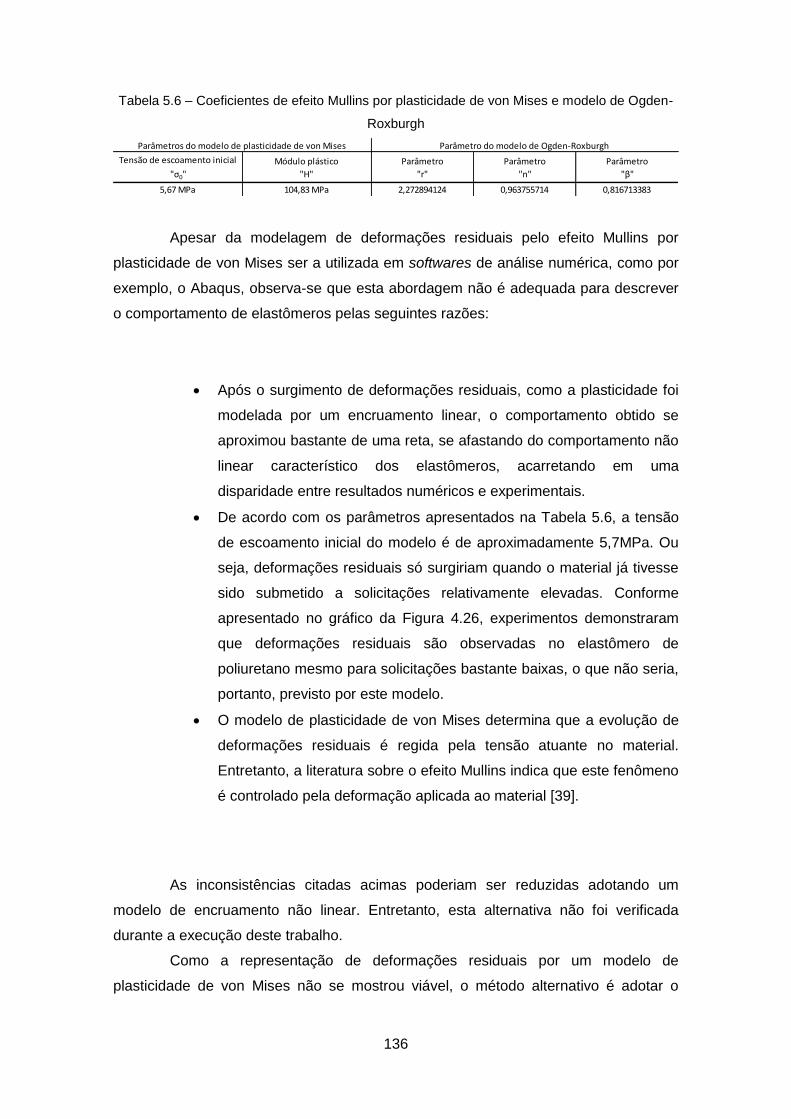
136
Tabela 5.6 – Coeficientes de efeito Mullins por plasticidade de von Mises e modelo de Ogden-
Roxburgh
Apesar da modelagem de deformações residuais pelo efeito Mullins por
plasticidade de von Mises ser a utilizada em softwares de análise numérica, como por
exemplo, o Abaqus, observa-se que esta abordagem não é adequada para descrever
o comportamento de elastômeros pelas seguintes razões:
Após o surgimento de deformações residuais, como a plasticidade foi
modelada por um encruamento linear, o comportamento obtido se
aproximou bastante de uma reta, se afastando do comportamento não
linear característico dos elastômeros, acarretando em uma
disparidade entre resultados numéricos e experimentais.
De acordo com os parâmetros apresentados na Tabela 5.6, a tensão
de escoamento inicial do modelo é de aproximadamente 5,7MPa. Ou
seja, deformações residuais só surgiriam quando o material já tivesse
sido submetido a solicitações relativamente elevadas. Conforme
apresentado no gráfico da Figura 4.26, experimentos demonstraram
que deformações residuais são observadas no elastômero de
poliuretano mesmo para solicitações bastante baixas, o que não seria,
portanto, previsto por este modelo.
O modelo de plasticidade de von Mises determina que a evolução de
deformações residuais é regida pela tensão atuante no material.
Entretanto, a literatura sobre o efeito Mullins indica que este fenômeno
é controlado pela deformação aplicada ao material [39].
As inconsistências citadas acimas poderiam ser reduzidas adotando um
modelo de encruamento não linear. Entretanto, esta alternativa não foi verificada
durante a execução deste trabalho.
Como a representação de deformações residuais por um modelo de
plasticidade de von Mises não se mostrou viável, o método alternativo é adotar o
Tensão de escoamento inicial
"σ0"
Módulo plástico
"H"
Parâmetro
"r"
Parâmetro
"n"
Parâmetro
"β"
5,67 MPa 104,83 MPa 2,272894124 0,963755714 0,816713383
Parâmetros do modelo de plasticidade de von Mises Parâmetro do modelo de Ogden-Roxburgh

137
modelo de Dorfmann-Ogden, na qual a energia de deformação do elastômero é
modificada de acordo com a seguinte equação:
22112121 1,,~
FFF NWW (5.53)
Onde “1 ” é a variável escalar de dano modelar o efeito da perda de rigidez,
cujo valor é definido pela equação (5.50). O efeito de deformações residuais é
introduzido através da variável escalar de dano “2 ”, sendo definida pela seguinte
equação:
1tanh
tanh
max
max
2
W
W
W
(5.54)
“Wmax” e “W ” são obtidos com auxílio da equação (5.51), e o expoente “α” é
definido pela seguinte equação:
0
max
Wba (5.55)
Onde “a” e “b” são propriedades materiais e “µ0” é o módulo de cisalhamento
da equação constitutiva hiperelástica. Como o modelo de Ogden com “N=6” foi
adotado, “µ0” é definido como:
6
1
0
i
i (5.56)
A função “N” adotada para introduzir efeitos anisotrópicos com o surgimento
de deformações residuais é definida pela equação (3.200). Para uma solicitação de
tração uniaxial, o tensor gradiente de deformações “F” é definido pela equação (5.1).
Associando ambas as equações, obtém-se a expressão de “N” para o caso de uma
solicitação uniaxial:
112
1,, 1
32
2
1321 vvvN (5.57)

138
Onde “ iv ” é um parâmetro material que inclui os efeitos anisotrópicos no
material. Seu valor depende do módulo de cisalhamento da equação constitutiva
hiperelástica “ 0 ”, definido pela equação (5.56), e do máximo estiramento “ mi ” na
direção correspondente:
1,0
1tanh
5,3
114,0 0
miiv
(5.58)
A tensão atuante no material é definida pela equação (3.197). Derivando a
equação (5.57) em relação ao estiramento “λ” e aplicando em (3.197):
2
321212
11~ vvvii (5.59)
Como o material é considerado isotrópico, no caso de tração uniaxial, as
direções perpendiculares à direção de aplicação de carregamento apresentam o
mesmo comportamento. Portanto, definindo “ 2v ” como o parâmetro para as direções
perpendiculares à direção principal de uma solicitação axial:
2
322
vvv
(5.60)
Aplicando (5.60) em (5.59):
2
2121 1~ vvii (5.61)
A equação (5.61) estabelece a solução do modelo de Dorfmann-Ogden para
o caso de solicitação uniaxial, e desta forma, os parâmetros “r”, “n”, “β”, “a” e “b”
podem ser identificados para descrição do efeito Mullins do elastômero de poliuretano.
O software Isight [49] foi utilizado para realizar a identificação de parâmetros
pelo método dos mínimos quadrados, em que um conjunto de constantes materiais é
estimado através de minimização da soma quadrática do resíduo (Σe²), utilizando
como referência as curvas de carregamento do ensaio com velocidade de travessão
de 10mm/min, conforme indicado no gráfico da Figura 5.7.

139
A Figura 5.9 mostra uma comparação gráfica do comportamento obtido pelo
modelo (linhas cheias) com os resultados experimentais (linhas tracejadas). Os
coeficientes característicos da solução obtida estão apresentados na Tabela 5.7:
Figura 5.9 – Ajuste de efeito Mullins pelo modelo de Dorfmann-Ogden
Tabela 5.7 – Coeficientes de efeito Mullins pelo modelo de Dorfmann-Ogden
Analisando o comportamento do modelo de Dorfmann-Ogden, observa-se
que esta abordagem descreve com eficácia tanto a perda de rigidez como a evolução
de deformações residuais. Portanto, este modelo será adotado para descrever o efeito
Mullins do elastômero de poliuretano.
5.4. Verificação do comportamento do modelo obtido em solicitações cíclicas
Associando os modelos que melhor representam a resposta do elastômero de
poliuretano para cada um de seus comportamentos e aplicando os parâmetros
identificados nos capítulos 5.1, 5.2 e 5.3, obtém-se um modelo visco-hiperelástico e de
efeito Mullins que fornece uma descrição completa do comportamento mecânico deste
material.
O comportamento em equilíbrio do elastômero de poliuretano é descrito pelo
modelo hiperelástico de Ogden com “N=6”. Para descrição do comportamento
0
2
4
6
8
10
12
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
geh
aria
(M
Pa)
Deformação de engenharia
C10% - modelo
C20% - modelo
C30% - modelo
C10% - 10mm/min
C20% - 10mm/min
C30% - 10mm/min
Parâmetros do modelo
hiperelástico
Módulo de cisalhamento
"μ0"
Parâmetro
"r"
Parâmetro
"n"
Parâmetro
"β"
Parâmetro
"a"
Parâmetro
"b"
51,28 MPa 1,379889881 1,553597751 0,70111756 0,174823198 4,057641577
Parâmetro do modelo de Dorfmann-Ogden
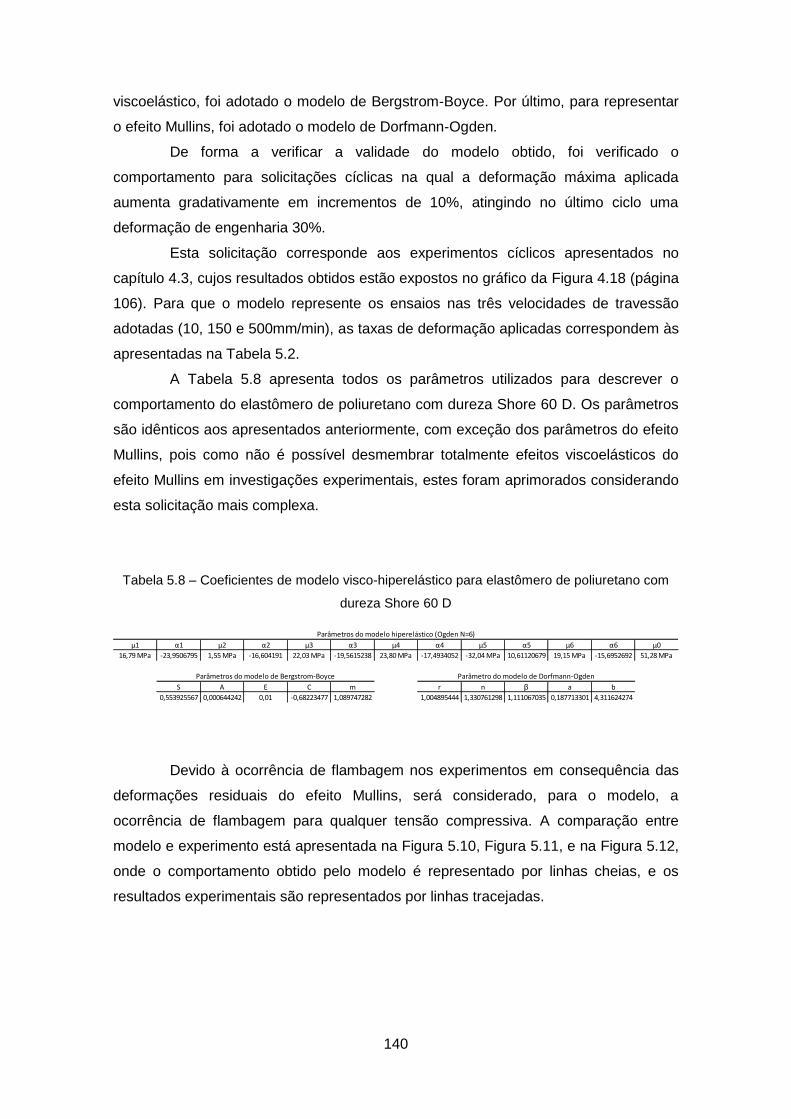
140
viscoelástico, foi adotado o modelo de Bergstrom-Boyce. Por último, para representar
o efeito Mullins, foi adotado o modelo de Dorfmann-Ogden.
De forma a verificar a validade do modelo obtido, foi verificado o
comportamento para solicitações cíclicas na qual a deformação máxima aplicada
aumenta gradativamente em incrementos de 10%, atingindo no último ciclo uma
deformação de engenharia 30%.
Esta solicitação corresponde aos experimentos cíclicos apresentados no
capítulo 4.3, cujos resultados obtidos estão expostos no gráfico da Figura 4.18 (página
106). Para que o modelo represente os ensaios nas três velocidades de travessão
adotadas (10, 150 e 500mm/min), as taxas de deformação aplicadas correspondem às
apresentadas na Tabela 5.2.
A Tabela 5.8 apresenta todos os parâmetros utilizados para descrever o
comportamento do elastômero de poliuretano com dureza Shore 60 D. Os parâmetros
são idênticos aos apresentados anteriormente, com exceção dos parâmetros do efeito
Mullins, pois como não é possível desmembrar totalmente efeitos viscoelásticos do
efeito Mullins em investigações experimentais, estes foram aprimorados considerando
esta solicitação mais complexa.
Tabela 5.8 – Coeficientes de modelo visco-hiperelástico para elastômero de poliuretano com
dureza Shore 60 D
Devido à ocorrência de flambagem nos experimentos em consequência das
deformações residuais do efeito Mullins, será considerado, para o modelo, a
ocorrência de flambagem para qualquer tensão compressiva. A comparação entre
modelo e experimento está apresentada na Figura 5.10, Figura 5.11, e na Figura 5.12,
onde o comportamento obtido pelo modelo é representado por linhas cheias, e os
resultados experimentais são representados por linhas tracejadas.
µ1 α1 µ2 α2 µ3 α3 µ4 α4 µ5 α5 µ6 α6 μ0
16,79 MPa -23,9506795 1,55 MPa -16,604191 22,03 MPa -19,5615238 23,80 MPa -17,4934052 -32,04 MPa 10,61120679 19,15 MPa -15,6952692 51,28 MPa
S A E C m r n β a b
0,553925567 0,000644242 0,01 -0,68223477 1,089747282 1,004895444 1,330761298 1,111067035 0,187713301 4,311624274
Parâmetros do modelo de Bergstrom-Boyce Parâmetro do modelo de Dorfmann-Ogden
Parâmetros do modelo hiperelástico (Ogden N=6)

141
Figura 5.10 – Comparação entre modelo e experimento para velocidade de travessão de
10mm/min
Figura 5.11 – Comparação entre modelo e experimento para velocidade de travessão de
150mm/min
0
2
4
6
8
10
12
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10 mm/min
Modelo 10
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
150 mm/min
Modelo 150

142
Figura 5.12 – Comparação entre modelo e experimento para velocidade de travessão de
500mm/min
Umas das hipóteses adotadas para o modelo desenvolvido foi que a condição
de ensaio com velocidade de travessão de 10mm/min corresponderia à condição de
equilíbrio do material, ou seja, uma condição em que os efeitos viscoelásticos seriam
irrelevantes.
Evidentemente, como toda a identificação de parâmetros foi baseada nesta
hipótese, o comportamento do modelo para uma taxa de deformação correspondente
à velocidade de travessão de 10mm/min apresenta efeitos viscoelásticos bastante
reduzido. Entretanto, o experimento indica que, mesmo para esta baixa velocidade de
travessão, efeitos viscoelásticos ainda são significativos, conforme pode ser
visualizado no gráfico da Figura 5.10.
A correlação entre modelo e experimento para uma velocidade de travessão
de 150mm/min foi excelente, conforme pode ser visualizado no gráfico da Figura 5.11.
Para o caso de velocidade de travessão de 500m/min, cujos resultados do
modelo e do experimento estão apresentados no gráfico da Figura 5.12, observa-se
uma boa correlação para as curvas de carregamento. Entretanto, para as curvas de
descarregamento, o resultado obtido do modelo foi bastante inadequado para
representar o comportamento real do material.
Como o modelo apresenta uma boa correspondência para as curvas de
carregamento nos três casos de taxa de carregamento, existe uma indicação de que
as formulações hiperelástica e de efeito Mullins estão adequadas. Entretanto, nas
solicitações de descarregamento, onde o comportamento viscoelástico do material é
predominante, foram encontradas as maiores discrepâncias entre modelo e
experimento.
0
2
4
6
8
10
12
14
16
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
500 mm/min
Modelo 500

143
6. Modelo visco-hiperelástico proposto para modelagem de elastômero de poliuretano
Conforme investigado no capítulo 5.4, existe uma indicação de que o modelo
apresentado anteriormente não possui uma formulação viscoelástica adequada para
representar o comportamento mecânico do elastômero de poliuretano.
O modelo viscoelástico de Bergstrom-Boyce considera que o efeito
viscoelástico é oriundo do movimento de reptação do domínio flexível do elastômero, e
desta forma, a tensão oriunda de efeitos viscoelásticos seria proporcional à equação
constitutiva hiperelástica que define o comportamento em equilíbrio do material.
Entretanto, para o caso dos elastômeros que apresentam domínios cristalinos
em sua microestrutura, o que é o caso do elastômero de poliuretano, existe uma teoria
viscoelástica alternativa em que se supõe que os efeitos viscoelásticos são
provenientes de efeitos dissipativos do domínio cristalino, e não do domínio flexível
elastomérico. Neste caso, a energia dissipada seria oriunda de deformações plásticas
e de quebra de ligações de hidrogênio do domínio cristalino, assim como de possíveis
efeitos de fricção entre diferentes domínios cristalinos [51].
Como o esforço viscoelástico provém do domínio cristalino e não da rede
elastomérica flexível, uma alteração significativa desta teoria em relação ao modelo de
Bergstrom-Boyce é que a tensão viscoelástica apresentaria comportamento linear
elástico, pois como o domínio cristalino apresenta uma razoável organização
molecular, seu mecanismo de deformação seria regido por alterações de energia
interna e não por entropia, o que seria o caso de uma tensão oriunda da rede
elastomérica flexível.
Um exemplo de modelo viscoelástico para elastômeros cristalinos que
considera perda de rigidez por efeito Mullins, mas sem inclusão de efeitos de
deformação residual, é o modelo macromolecular de Qi-Boyce [51]. Neste modelo, o
elastômero é descrito como um material compósito, no qual o domínio cristalino
representaria um domínio rígido e a rede elastomérica flexível representaria um
domínio flexível do material, consideração esta que condiz com a teoria apresentada
sobre o elastômero de poliuretano, capítulo 3.1.1.

144
Desta forma, a composição do material é representada por uma fração
volumétrica de domínio rígido “vh” e por uma fração volumétrica de domínio flexível
“vs”, de tal forma que:
1 sh vv (6.1)
O modelo de Qi-Boyce supõe que o efeito Mullins ocorre devido às variações
destas frações volumétricas, em que parte do domínio flexível está inicialmente
agregada ao domínio rígido, sendo esta desprendida quando o elastômero é
submetido a uma deformação. Esta hipótese é adequada, pois existem evidencias de
que, apesar destes domínios serem quimicamente incompatíveis, gerando uma
segregação microestrutural, uma separação incompleta destas fases é observada em
elastômero de poliuretano [5].
É interessante ressaltar ainda que, apesar dos modelos de Ogden-Roxburgh
e de Dorfmann-Ogden serem de abordagem fenomenológica, estes também se
basearam no conceito de reorganização dos domínios rígido e flexível do elastômero
para descrever o efeito Mullins, porém representando este fenômeno por uma variável
escalar de dano [40, 42, 43]. Portanto, de certa forma, a descrição da reorganização
das frações volumétricas está presente de maneira implícita nestes modelos
fenomenológicos.
Por adotar uma abordagem macromolecular, o modelo de Qi-Boyce considera
que o comportamento em equilibro do elastômero é descrito pelo modelo constitutivo
hiperelástico de Arruda-Boyce, cuja formulação foi apresentada no capítulo 3.2.1.2,
introduzindo algumas variáveis adicionais para descrever a evolução das frações
volumétricas do material, visando modelar a perda de rigidez pelo efeito Mullins.
Quando foram identificados os parâmetros de diversos modelos hiperelásticos
disponíveis na literatura, foi verificado que o modelo de Arruda-Boyce, não é
apropriado para descrever o comportamento do elastômero de poliuretano. Portanto, a
abordagem inicial para modelagem do comportamento em equilíbrio do elastômero de
poliuretano será mantida conforme realizado no capitulo 5, ou seja, utilizando o
modelo constitutivo de Ogden com “N=6” sujeito ao efeito Mullins pelo modelo de
Dorfmann-Ogden. A única alteração que será realizada é a formulação viscoelástica
do modelo.
Assim como para o modelo de Bergstrom-Boyce, a comportamento em
equilíbrio e o comportamento transitório viscoelástico serão separados por uma
decomposição multiplicativa de deformação, na qual uma parte modela o

145
comportamento do elastômero em equilíbrio sujeito ao efeito Mullins (domínio “A”), em
paralelo com outra parte que captura o comportamento viscoelástico transiente do
material (domínio “B”). Uma representação gráfica da decomposição multiplicativa de
deformação está apresentada na Figura 6.1:
Figura 6.1 – Decomposição multiplicativa de deformação do modelo viscoelástico proposto
Como o comportamento em deformação do modelo viscoelástico proposto é
idêntico ao modelo de Bergstrom-Boyce, todo o tratamento matemático para definir a
evolução de deformação do material será omitido, pois é o mesmo do já realizado no
capítulo 3.3.2. A única alteração será a formulação que determina a taxa de
deformação viscosa “v
B ”, cujo valor deve ser definido constitutivamente. Desta forma,
a equação (6.2) propõe a seguinte formulação alternativa para “v
B ”:
m
BCcr
B
v
Bs
EA
1 (6.2)
Comparando a formulação da taxa de deformação viscosa do modelo
proposto, equação (6.2), como a formulação original proposta por Bergstrom-Boyce,
equação (3.168), observa-se que a única alteração foi a inclusão do parâmetro de
amolecimento “s” como denominador da tensão viscoelástica “B ”. Este parâmetro
representa o efeito no comportamento viscoelástico do elastômero devido às
alterações da constituição do domínio cristalino causadas por uma deformação. O
BA FFF
v
BF
e
BF
Configuração de
referência
Configuração
atual
Configuração relaxada

146
modelo de Qi-Boyce propõe a seguinte formulação para o parâmetro de amolecimento
“s” [42]:
0
0
sv
vs
h
h
(6.3)
Onde “vh0” representa a fração volumétrica do domínio rígido de um
elastômero virgem e “s0” o valor inicial para o parâmetro de amolecimento.
De acordo com esta teoria de origem do efeito Mullins, uma redução da
fração volumétrica do domínio rígido “vh” ocorre somente quando uma solicitação
excede a máxima deformação prévia de todo o histórico de solicitações do material. O
modelo de Qi-Boyce estabelece a evolução de “vh” pela seguinte equação [42]:
max
max0
1exp
L
hhshsh Avvvv
(6.4)
Onde “vhs” representa a fração volumétrica de saturação do domínio rígido, e
“λL” representa o máximo estiramento que uma cadeia polimérica pode suportar
considerando a formulação constitutiva hiperelástica de Arruda-Boyce, cujo valor é
definido pela equação (3.77). O estiramento máximo amplificado da cadeia “Λmax” um
escalar que depende da máxima deformação a qual o elastômero foi submetido. No
caso de uma solicitação uniaxial, “Λmax” é definido como [42]:
11185,312
max
2
max hh vv (6.5)
Onde “λmax” representa o máximo estiramento característico de uma
solicitação axial.
Conforme mencionado anteriormente, o modelo de Qi-Boyce considera a
solução hiperelástica de Arruda-Boyce como representativa do comportamento em
equilíbrio do elastômero, e por esta razão, a evolução da fração volumétrica do
domínio rígido “vh”, definida pela equação (6.4), depende de parâmetros
característicos desta equação constitutiva.
147
De forma a tornar o modelo viscoelástico proposto fenomenológico e
totalmente independente da equação constitutiva hiperelástica adotada para
representar o comportamento em equilíbrio de um elastômero, será proposta a
seguinte equação para definir a evolução da fração volumétrica do domínio rígido “vh”:
max2
max10 exp
WK
WKvvvv hhshsh
(6.6)
Na formulação original, a constante “A” já era um parâmetro fenomenológico.
Entretanto, este parâmetro foi modificado para “K1” somente para evidenciar que esta
é uma formulação distinta.
O estiramento máximo amplificado da cadeia “Λmax” foi substituído por “Wmax”,
que corresponde à máxima energia de deformação elástica à qual o material já foi
submetido. De certa maneira, os dois parâmetros representam o mesmo fenômeno
físico, pois ambos dependem de um estado de solicitação máxima em todo o histórico
de carregamento do material.
O máximo estiramento que uma cadeia polimérica pode suportar “λL” foi
substituído pelo parâmetro fenomenológico “K2”. Desta forma, semelhante à “λL”, “K2”
representa um estado de deformação extrema na qual a fração volumétrica de
saturação do domínio rígido “vhs” é atingida. A única diferença é qual grandeza física
foi adotada para representar este estado extremo: na formulação original, o estado
estremo corresponde ao estiramento total de uma cadeia polimérica; na formulação
proposta, este estado extremo é representado por uma energia de deformação
extrema.
Com a evolução de “vh” definida, resta somente determinar o comportamento
da tensão viscoelástica “ B ” na taxa de deformação viscosa “v
B ”, definida pela
equação (6.2). Considerando que os efeitos viscoelásticos são oriundos do domínio
cristalino do material, este deve apresentar comportamento linear elástico. Desta
forma, será adotada a formulação de tensão viscoelástica do modelo de Qi-Boyce, em
que é sugerida a seguinte formulação para representar o comportamento transiente do
material [42]:
e
BB VDσ lnhv (6.7)

148
Onde “D” é o tensor elástico de quarta ordem e “e
BV ” é o tensor de
estiramento à esquerda, sendo determinado pela seguinte equação [31]:
TFFBV 2
1
(6.8)
Considerando uma solicitação tração uniaxial, e definindo “λ” como o seu
estiramento característico, o tensor gradiente de deformações “F” é definido da
seguinte maneira:
2/1
2/1
00
00
00
F (6.9)
Aplicando (6.9) em (6.8):
2/1
2/1
00
00
00
FV (6.10)
Aplicando (6.10) em (6.7), e como o problema está sendo analisado de
maneira unidimensional, apresentando apenas a componente de tensão “11B ”:
ln11 BhB Ev (6.11)
Onde “EB” representa o módulo de elasticidade característico do domínio
cristalino.
Com o comportamento definido pelas equações (6.2), (6.3), (6.6) e (6.11),
uma representação gráfica unidimensional do modelo visco-hiperelástico proposto é
apresentada na Figura 6.2:

149
Figura 6.2 – Representação unidimensional do modelo viscoelástico proposto
Assim como para a identificação dos parâmetros do modelo de Bergstrom-
Boyce, os ensaios experimentais de tração apresentados na Figura 4.11 serão
utilizados como referência para identificar os parâmetros do modelo visco-hiperelástico
proposto. O software Isight [49] foi utilizado para realizar o procedimento de
identificação de parâmetros pelo método dos mínimos quadrados, em que um conjunto
de constantes materiais é estimado através de minimização da soma quadrática do
resíduo (Σe²) de cada uma das três referencias apresentadas na Figura 4.11.
A Figura 6.3 mostra uma comparação gráfica do comportamento obtido pelo
modelo (linhas cheias) com os resultados experimentais (linhas tracejadas) e também
com a solução hiperelástica que serve de referência como o comportamento em
equilíbrio do elastômero de poliuretano. Os coeficientes característicos da solução
obtida estão apresentados na Tabela 6.1:
Figura 6.3 – Ajuste do modelo visco-hiperelástico proposto
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engeharia
hiperelástico
10 mm/min
150 mm/min
500 mm/min
Modelo 10
Modelo 150
Modelo 500
σ, ε
ln11 BhB Ev
i
iA
N
2111 1
B
v
B NLv
B~
Domínio “A” Domínio “B”

150
Tabela 6.1 – Coeficientes do modelo viscoelástico proposto
Comparando o resultado do modelo viscoelástico proposto (Figura 6.3) com o
resultado obtido pelo modelo de Bergstrom-Boyce (Figura 5.6), observa-se que
considerar que a viscoelasticidade é oriunda de efeitos dissipativos do domínio
cristalino, e não do domínio flexível elastomérico, trouxe resultados bastante
superiores, isto é, o comportamento do modelo proposto se aproximou mais dos
resultados experimentais obtidos de amostras do elastômero de poliuretano.
Para verificar a superioridade do modelo visco-hiperelástico proposto, será
verificado a seguir o comportamento obtido em solicitações cíclicas na qual a
deformação máxima aplicada aumenta gradativamente em incrementos de 10%,
atingindo no último ciclo uma deformação de engenharia 30%.
Esta solicitação corresponde aos experimentos cíclicos apresentados no
capítulo 4.3, cujos resultados obtidos estão expostos no gráfico da Figura 4.18 (página
106). Para que o modelo represente os ensaios nas três velocidades de travessão
adotadas (10, 150 e 500mm/min), as taxas de deformação aplicadas correspondem às
apresentadas na Tabela 5.2.
A Tabela 6.2 apresenta todos os parâmetros utilizados para descrever o
comportamento do elastômero de poliuretano com dureza Shore 60 D. Os parâmetros
iniciais do modelo de Dorfmann-Ogden para descrição do efeito Mullins foram obtidos
de acordo com a identificação de parâmetros realizada no capítulo 5.3, cujos
resultados estão apresentados na Tabela 5.7. Entretanto, como não é possível
desmembrar totalmente efeitos viscoelásticos do efeito Mullins em investigações
experimentais, estes foram aprimorados considerando esta solicitação mais complexa.
Tabela 6.2 – Coeficientes de modelo visco-hiperelástico proposto para elastômero de
poliuretano com dureza Shore 60 D
Devido à ocorrência de flambagem nos experimentos em consequência das
deformações residuais do efeito Mullins, será considerado, para o modelo, a
A E C m Eb S0 Vh0 Vhs K1 K2
0,000198016 0,01 -0,835285082 1,240065106 144,46 MPa 1,2061449 0,410465973 0,153387021 213,18 mm²/N 268,41 MPa
µ1 α1 µ2 α2 µ3 α3 µ4 α4 µ5 α5 µ6 α6 μ0
16,79 MPa -23,95067952 1,55 MPa -16,60419096 22,03 MPa -19,56152379 23,80 MPa -17,49340517 -32,04 MPa 10,61120679 19,15 MPa -15,69526925 51,28 MPa
A E C m Eb S0 Vh0 Vhs K1 K2
0,000198016 0,01 -0,835285082 1,240065106 144,46 MPa 1,2061449 0,410465973 0,153387021 213,18 mm²/N 268,41 MPa
r n β a b
1,64197469 1,409444087 0 0,100568094 3,87408864
Parâmetros do modelo hiperelástico (Ogden N=6)
Parâmetros do modelo viscoelástico proposto
Parâmetro do modelo de Dorfmann-Ogden

151
ocorrência de flambagem para qualquer tensão compressiva. A comparação entre
modelo proposto e experimento está apresentada na Figura 6.4, Figura 6.5, e na
Figura 6.6, onde o comportamento obtido pelo modelo proposto é representado por
linhas cheias, e os resultados experimentais são representados por linhas tracejadas.
Figura 6.4 – Comparação entre modelo e experimento visco-hiperelástico proposto para
velocidade de travessão de 10mm/min
Figura 6.5 – Comparação entre modelo visco-hiperelástico proposto e experimento para
velocidade de travessão de 150mm/min
0
2
4
6
8
10
12
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10 mm/min
Modelo 10
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
150 mm/min
Modelo 150

152
Figura 6.6 – Comparação entre modelo visco-hiperelástico proposto e experimento para
velocidade de travessão de 500mm/min
Para o caso de velocidade de travessão de 150mm/min, resultados
excelentes já haviam sido obtidos com a formulação original. Entretanto, com a
aplicação do modelo visco-hiperelástico proposto, a correlação entre modelo e
experimento foi aprimorada.
O aperfeiçoamento mais significativo foi observado para o caso de velocidade
de travessão de 500mm/min. O modelo original não foi capaz de representar as curvas
de descarregamento para esta elevada taxa de carregamento, já o modelo visco-
hiperelástico proposto representou melhor este comportamento do elastômero de
poliuretano.
Além disso, a melhoria de representação do comportamento em
descarregamento também é notável para o caso de velocidade de travessão de
150mm/min. Embora o modelo original fosse capaz de representar razoavelmente bem
esta situação do material, a forma da resposta do modelo não correspondia à forma
observada nos experimentos. Já para o modelo visco-hiperelástico proposto, o formato
da curva de descarregamento se assemelha muito mais aos resultados experimentais.
O único resultado que continuou sem uma representação fidedigna do
experimento foi o caso de velocidade de travessão de 10mm/min. Entretanto,
conforme discutido anteriormente, uma boa representação por qualquer modelo não
seria possível, pois a hipótese de que a solicitação em velocidade de travessão de
10mm/min representaria o comportamento em equilibro do elastômero de poliuretano
não foi apropriada. Ainda assim, observa-se que um aprimoramento no resultado
obtido com o uso do modelo visco-hiperelástico proposto.
0
2
4
6
8
10
12
14
0% 5% 10% 15% 20% 25% 30%
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
500 mm/min
Modelo 500

153
7. Exemplos de aplicação do modelo proposto
Com posse do modelo visco-hiperelástico e de efeito Mullins desenvolvido no
capítulo 6, cujos resultados iniciais se mostraram bastante promissores, serão
apresentados a seguir alguns exemplos de aplicação.
O primeiro exemplo mostra como o modelo pode ser empregado para
compreender a diferenciação do comportamento do elastômero de poliuretano para
diferentes solicitações, que de maneira intuitiva, poderia ser pressuposto que são
equivalentes.
Em outro exemplo, de forma a verificar abrangência da validade do modelo
desenvolvido, serão estimados parâmetros de uma variedade distinta de elastômero
de poliuretano, baseado em dados experimentais presentes na literatura.
7.1. Efeito da natureza da solicitação no comportamento do elastômero de poliuretano
Em materiais com comportamento elástico linear, como por exemplo os
metais, se a tensão de escoamento não for alcançada, a resposta do material pouco
depende se a solicitação é controlada por tensão ou por deformação, pois há uma
relação bem definida entre estas grandezas físicas.
No caso do elastômero de poliuretano, como o efeito Mullins introduz
deformações residuais mesmo para relativos baixos níveis de deformação em relação
a sua capacidade de elongação, uma diferenciação de comportamento é obtida a
depender da natureza da solicitação aplicada ao material, ou seja, se esta é
controlada por tensão ou deformação.
Primeiramente, será considerado o caso de uma solicitação por controle de
deformação, na qual o material é submetido uma solicitação senoidal com
deformações de engenharia impostas entre 0% e 8% em um período de solicitação de
10 segundos, correspondendo a um período típico de solicitações de estruturas
offshore, o que é o caso do Enrijecedor à Flexão.
Portanto, para o caso de solicitação por controle de deformação, a seguinte
solicitação é aplicada ao modelo desenvolvido no capítulo 6:
2-tsen104,0
e (7.1)

154
Onde “-π/2” é o ângulo de fase para que a solicitação no instante inicial “t=0”
corresponda à situação de material descarregado e “ω” representa a frequência
angular de solicitação, definida pela seguinte expressão:
T
2 (7.2)
O gráfico da Figura 7.1 apresenta o comportamento obtido para a solicitação
por controle de deformação, onde a linha cheia representa todo o histórico de
solicitações e a linha tracejada representa apenas um ciclo estabilizado, sendo este
obtido após determinado tempo para estabilização dos efeitos viscoelásticos.
Figura 7.1 – Comportamento do elastômero de poliuretano em uma solicitação cíclica de
controle de deformação
Analisando o ciclo estabilizado da solicitação por controle de deformação,
observa-se que a máxima tensão de engenharia alcançada é de 7,46 MPa. Supondo
que o elastômero de poliuretano respondesse de maneira de maneira equivalente em
solicitações controladas por tensão ou deformação, uma solicitação senoidal com
tensões de engenharia impostas entre 0 Mpa e 7,46 MPa em um período de
solicitação de 10 segundos deveria fornecer resultados muito semelhantes.
Portanto, para o caso de solicitação por controle de tensão, a seguinte
solicitação é aplicada ao modelo desenvolvido no capítulo 6:
2-tsen173,3
(7.3)
-6
-4
-2
0
2
4
6
8
10
0 % 1 % 2 % 3 % 4 % 5 % 6 % 7 % 8 % 9 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Solicitação completa
Ciclo estabilizado

155
O gráfico da Figura 7.2 apresenta o comportamento obtido para a solicitação
por controle de tensão, onde a linha cheia representa todo o histórico de solicitações e
a linha tracejada representa apenas um ciclo estabilizado, sendo este obtido após
determinado tempo para estabilização dos efeitos viscoelásticos.
Figura 7.2 – Comportamento do elastômero de poliuretano em uma solicitação cíclica de
controle de tensão
Para comparação direta do efeito da natureza de solicitação, o gráfico da
Figura 7.3 apresenta os ciclos estabilizados obtidos com controle de deformação e
com controle de tensão:
Figura 7.3 – Comparação do comportamento do elastômero de poliuretano em solicitação
cíclica de controle de deformação e de controle de tensão
-1
0
1
2
3
4
5
6
7
8
0 % 1 % 2 % 3 % 4 % 5 % 6 % 7 % 8 % 9 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Solicitação completa
Ciclo estabilizado
-6
-4
-2
0
2
4
6
8
10
0 % 2 % 4 % 6 % 8 % 10 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Controle ε
Controle σ

156
Devido ao surgimento de deformações residuais pelo efeito Mullins, conclui-
se que a natureza da solicitação é uma característica importante a ser identificada
para determinar o comportamento mecânico do elastômero de poliuretano.
Por exemplo, considerando que se deseja conhecer o comportamento em
fadiga deste material, o gráfico da Figura 7.3 indica que, a depender da natureza de
solicitação, o histórico de tensões e deformações atuantes no material é bastante
diferenciado. Desta forma, é provável que sejam obtidas vidas à fadiga distintas para
cada um dos casos de solicitação.
7.2. Aplicação do modelo em resultados experimentais de variedade distinta de elastômero de poliuretano
Para verificar a abrangência do modelo visco-hiperelástico e de efeito Mullins
desenvolvido no capítulo 6, será apresentado a seguir um exemplo de aplicação deste
modelo em uma variedade distinta de elastômero de poliuretano especificado com
dureza Shore 60 D (PU 60D), cujo comportamento foi apresentado no capítulo 4 deste
trabalho.
MENICONI e LOPES realizaram uma caracterização experimental de
elastômero de poliuretano especificado com uma dureza Shore 85/95 A (PU 85/95A),
extraindo uma amostra de um Enrijecedor à Flexão [8]. É interessante notar que,
conforme indicado na Figura 7.4, o PU 85/95A está no extremo oposto da faixa usual
de aplicação deste material em Enrijecedores à Flexão.
Figura 7.4 – Comparação entre especificações de dureza das duas variedades de elastômero
de poliuretano estudadas
Faixa usual de aplicação para
enrijecedores à flexão
PU
Shore
85/9
5 A
PU
Shore
60 D
ELASTÔMEROS PLÁSTICOS
Shore A 0 10 20 30 40 50 60 70 80 90 100
Shore OO 0 10 20 30 40 50 60 70 80 90 100
Shore D 0 10 20 30 40 50 60 70 80 90 100

157
A partir da amostra retirada do Enrijecedor à Flexão, foram confeccionados
corpos de prova tipo I da norma ASTM D638 [46], sendo realizado um ensaio de
tração monotônica com velocidade de travessão de 50mm/min e dois ensaios cíclicos
com período de 10 segundos. Os resultados obtidos estão apresentados no gráfico da
Figura 7.5 [8]:
Figura 7.5 – Ensaios realizados em elastômero de poliuretano com dureza Shore 85/95 A [8]
Em ambos os ensaios cíclicos, foram aplicados um intervalo de deformação
“Δe” de 6,5%, alterando apenas a deformação média. No ensaio “cíclico I”, foi aplicada
uma deformação média de 4,5%, enquanto que no ensaio “cíclico II” foi aplicada uma
deformação média de 8,5%.
Como os dados experimentais apresentados na Figura 7.5 são bastante
escassos em relação à caracterização experimental do PU 60D, a utilização apenas
destes podem não ser suficientes para realizar a identificação de parâmetros para o
PU 85/95A.
De acordo com a teoria sobre o elastômero de poliuretano apresentada no
capítulo 3.1.1, a obtenção de diferentes durezas deste material é alcançada pela
alteração da proporção de domínio cristalino em sua microestrutura. Baseando-se
nesta observação, é razoável supor que haja uma proporcionalidade entre alguns
parâmetros que definem o comportamento destes materiais similares. Desta forma,
serão apresentadas a seguir algumas hipóteses para auxiliar na identificação de
parâmetros do PU 85/95A.
O gráfico da Figura 7.6 mostra uma comparação dos resultados de tração
monotônica para as duas variedades de elastômero de poliuretano. Evidentemente,
como o PU 85/95A apresenta menor rigidez, o nível de tensão atingido deste material
-1
0
1
2
3
4
5
6
7
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
50mm/min
cíclico I
cíclico II

158
é significativamente inferior em relação ao PU 60D. Entretanto, observa-se que existe
certa semelhança na curva de resposta de ambos os materiais.
Figura 7.6 – Comparação de resultados de ensaios de tração monotônica das diferentes
variedades de elastômero de poliuretano
Desta forma, o modelo constitutivo de Ogden com “N=6” também será
adotado para representar o comportamento em equilíbrio do PU 85/95A. E como
existe uma proporcionalidade entre o comportamento de ambos os materiais,
denominando “W60D” como função densidade de energia de deformação definida para
o PU 60D, a função densidade de energia de deformação do PU 85/95A “W85/95A” pode
ser obtida através de um fator de escala de tensão “S”, conforme apresentado na
equação (7.4):
60D85/95A SWW (7.4)
O modelo proposto no capítulo 6 considera que todos os efeitos
viscoelásticos do elastômero de poliuretano são oriundos dos domínios cristalinos do
material. Outra hipótese significativa que será realizada é considerar que o
comportamento característico do domínio cristalino é idêntico para ambos as
variedades de elastômero de poliuretano, ou seja, que a composição e organização da
rede cristalina são iguais, diferenciando-se apenas em fração volumétrica de domínio
rígido “vh”, que é menor no caso do PU 85/95A. Em consequência desta hipótese, o
módulo de elasticidade do domínio cristalino “EB”, e os parâmetros característicos “A”,
“E”, “C” e “m” que definem a taxa de deformação viscosa “v
B ”, equação (6.2), serão
0
2
4
6
8
10
12
14
0 % 5 % 10 % 15 % 20 % 25 % 30 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
10mm/min (PU 60D)
150mm/min (PU 60D)
500mm/min (PU 60D)
50mm/min (PU 85/95A)

159
considerados idênticos aos definidos para o caso do PU 60D, cujos valores estão
apresentados na Tabela 6.2.
Portanto, com base nas hipóteses de proporcionalidade dos comportamentos
em equilíbrio e de que o comportamento individual do domínio cristalino independe da
dureza macroscópica do elastômero de poliuretano, os únicos parâmetros a serem
identificados é fator de escala de tensão “S”, os parâmetros que definem a evolução
da fração volumétrica do domínio rígido (“vhs”, “vh0”, “K1”, “K2” e “s0”), assim como os
parâmetros que descrevem o efeito Mullins (“r”, “n”, “β”, “a” e “b”), já que o modelo de
Dorfmann-Ogden é implicitamente dependente da fração volumétrica do domínio
rígido.
Conforme exposto anteriormente, está disponível na referência apenas uma
condição de ensaio monotônico para o PU 85/95A. Com esta escassez de dados
experimentais, estimar o parâmetro “S” que define a função densidade de energia de
deformação “W85/95A” em conjunto com os parâmetros que definem o comportamento
viscoelástico, ou seja, a evolução de fração volumétrica de domínio rígido,
desconsiderando por ora o efeito Mullins, pode não fornecer os melhores parâmetros
que representariam o comportamento mecânico do PU 85/95A.
Por esta razão, aplicando as restrições de parâmetros definidas pelas
hipóteses simplificadoras citadas acima, todos os parâmetros remanescentes para
definir o comportamento do PU 85/95A foram identificados simultaneamente. O
software Isight [49] foi utilizado para realizar o procedimento de identificação de
parâmetros pelo método dos mínimos quadrados, em que um conjunto de constantes
materiais é estimado através de minimização da soma quadrática do resíduo (Σe²) de
cada uma das três referencias apresentadas na Figura 7.5.
A Figura 7.7 mostra uma comparação gráfica do comportamento obtido pelo
modelo (linha cheia) com o resultado experimental (linha tracejada) de tração
monotônica, enquanto que a Figura 7.8 apresenta uma comparação para os
carregamentos cíclicos. Os coeficientes característicos da solução obtida estão
apresentados na Tabela 7.1, em que os parâmetros destacados na cor vermelha
representam aqueles que foram determinados com auxílio das hipóteses postuladas
anteriormente:

160
Figura 7.7 – Aplicação do modelo visco-hiperelástico proposto em PU 85/95A – resultados de
tração monotônica
Figura 7.8 – Aplicação do modelo visco-hiperelástico proposto em PU 85/95A – resultados de
carregamentos cíclicos
Tabela 7.1 – Coeficientes de modelo visco-hiperelástico proposto em PU 85/95A
0
1
2
3
4
5
6
7
0 % 5 % 10 % 15 % 20 % 25 % 30 % 35 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Modelo 50mm/min
50mm/min
-0,5
0
0,5
1
1,5
2
2,5
3
0 % 2 % 4 % 6 % 8 % 10 % 12 % 14 %
Ten
são
de
en
gen
har
ia (
MP
a)
Deformação de engenharia
Modelo cíclico I
Modelo cíclico II
cíclico I
cíclico II
µ1 α1 µ2 α2 µ3 α3 µ4 α4 µ5 α5 µ6 α6 μ0
8,28 MPa -23,95067952 0,76 MPa -16,60419096 10,86 MPa -19,56152379 11,73 MPa -17,49340517 -15,79 MPa 10,61120679 9,44 MPa -15,69526925 25,27 MPa
A E C m Eb S0 Vh0 Vhs K1 K2
0,000198016 0,01 -0,835285082 1,240065106 144,46 MPa 1 0,191363621 0,069081772 183,39 mm²/N 914,29 MPa
r n β a b
2,211372483 0,300700802 0 0 0
Parâmetros do modelo hiperelástico (Ogden N=6)
Parâmetros do modelo viscoelástico proposto
Parâmetro do modelo de Dorfmann-Ogden

161
Os resultados gráficos mostram que os parâmetros identificados para o
modelo visco-hiperelástico proposto descrevem adequadamente o comportamento do
PU 85/95A, indicando ainda que as hipóteses formuladas para auxiliar na identificação
de parâmetros são coerentes.
Na Tabela 7.1, estão apresentados diretamente os parâmetros para equação
constitutiva hiperelástica que definem o comportamento em equilíbrio do PU85/95A.
Conforme uma das hipóteses adotadas para definir o comportamento desta variedade
de elastômero de poliuretano, os parâmetros do modelo de Ogden com “N=6” foram
obtidos com o auxílio do fator de escala de tensão “S”, cujo valor foi identificado em
aproximadamente 0,4928.
É interessante notar ainda que a fração volumétrica do domínio rígido “vh0”
estimada para o PU 85/95A foi de aproximadamente 0,19, enquanto que para o PU
60D foi de aproximadamente 0,41. Nenhuma restrição adicional foi aplicada em ambos
os procedimentos de identificação de parâmetros, restringindo apenas para o intervalo
fisicamente permissível de 0≤vh0≤1. Entretanto, os parâmetros obtidos corroboram
com a constatação de que elastômeros de poliuretano mais rígidos apresentam uma
maior fração volumétrica de domínios cristalinos.
Uma observação importante a ser realizada é que, em contato realizado com
um dos autores do trabalho cujo resultado está apresentado na Figura 7.5 [8], foi
obtida a informação de que um único corpo de prova foi utilizado para obter resultados
dos diversos ensaios cíclicos. Além disso, não há registro da ordem em que os
ensaios cíclicos foram realizados, impossibilitando afirmar, para cada ensaio, qual é a
máxima deformação histórica a qual o material foi submetido.
Por esta razão, sendo conhecido que o máximo estiramento aplicado a este
corpo de prova foi de λ=1,5, foi considerado que está deformação máxima foi
alcançada previamente em todos os ensaios cíclicos. Esta hipótese tem influência no
modelo de Dorfmann-Ogden, isto é, no comportamento do efeito Mullins.
Outra consequência significativa do uso do mesmo corpo de prova para
diversos ensaios cíclicos é que este pode ter sido desmobilizado do equipamento de
teste entre alguns ensaios. Desta forma, a informação de deformação residual devido
ao efeito Mullins pode ter sido perdida. Um argumento que ratifica esta suposição é
que os parâmetros “a” e “b” do modelo Dorfmann-Ogden foram identificados com valor
nulo para o PU 85/95A (ver Tabela 7.1).
Diversos outros ensaios cíclicos foram realizados para o PU 85/95A além
daqueles apresentados no gráfico da Figura 7.5 [8]. Entretanto, os resultados obtidos
não estão apresentados em diagramas tensão-deformação, mas apenas os valores
calculados para o módulo de armazenamento (E´).

162
O módulo de armazenamento é uma das medidas clássicas de caracterização
dinâmica de materiais viscoelásticos. Considerando uma deformação cíclica senoidal
imposta a um material viscoelástico, a deformação e a tensão atuantes no mesmo
podem ser descritas pelas seguintes expressões [34]:
tsen0 ee (7.5)
tsen0 (7.6)
Onde “e0” e “σ0” representam, respectivamente, as amplitudes de deformação
e tensão, “t” o tempo e “ω” a frequência angular de solicitação, cuja definição foi
apresentada na equação (7.2). O ângulo de fase “δ” representa a defasagem entre
solicitação e resposta do material: quanto maior for o valor de “δ”, maior será a
influência dos fenômenos viscoelásticos no comportamento do material. Com o auxílio
destas definições, o módulo de armazenamento “E´” é determinado pela seguinte
expressão [34]:
cos0
0
eE (7.7)
Serão apresentadas a seguir comparações gráficas do módulo de
armazenamento obtido pelo modelo (linha cheia) com resultados experimentais (linha
tracejada) [8]. A Figura 7.9 apresenta o comportamento de “E´” em função da
deformação média aplicada e a Figura 7.10 em função do intervalo de deformação,
sendo que todos os ensaios foram realizados em um período de solicitação de 10
segundos. Por último, a Figura 7.11 apresenta o comportamento de “E´” com a
variação do período solicitação.
É importante ressaltar que, na Figura 7.9, os dados destacados com círculos
amarelos correspondem aos ensaios “cíclico I” e “cíclico II” apresentados na Figura
7.5. Portanto, estes pontos específicos não verificam diretamente a robustez do
modelo desenvolvido frente a uma solicitação qualquer, pois estes dados foram
utilizados para identificar os parâmetros do PU85/95A.

163
Figura 7.9 – Variação do módulo de armazenamento com a variação da deformação média –
comparação entre modelo e experimento para o PU85/95A
Figura 7.10 – Variação do módulo de armazenamento com a variação do intervalo de
deformação – comparação entre modelo e experimento para o PU85/95A
20
25
30
35
40
45
50
55
0 5 10 15 20 25
Mó
du
lo d
e a
rmaz
en
ame
nto
(M
Pa)
deformação média (%)
Δe = 2,5%
Δe = 10%
Δe = 6,5%
modelo
0
5
10
15
20
25
30
35
0 2 4 6 8 10 12 14
Mó
du
lo d
e a
rmaz
en
ame
nto
(M
Pa)
intervalo de deformação (%)
e_m = 10%
e_m = 15%
modelo

164
Figura 7.11 – Variação do módulo de armazenamento com a variação do período de solicitação
– comparação entre modelo e experimento para o PU85/95A
Dos resultados apresentados na Figura 7.9, observa-se que, de maneira
geral, foi obtida uma boa correlação entre modelo e experimento considerando a
variação da deformação média aplicada, sendo uma exceção a curva de intervalo de
deformação de 2,5%. Na realidade, o modelo obtido fornece um resultado que pouco
varia em função do intervalo de deformação aplicada, conforme pode ser observado
na Figura 7.10.
Quanto a variação do período de solicitação, o resultado apresentado na
Figura 7.11, indica que o modelo é capaz de prever a redução do módulo de
armazenamento para solicitações em períodos mais longos.
0
5
10
15
20
25
30
35
0 5 10 15 20 25
Mó
du
lo d
e a
rmaz
en
ame
nto
(M
Pa)
Período (s)
Δe = 10% ; e_m = 10%
Δe = 13% ; e_m = 15%
modelo

165
8. Considerações finais
O elastômero de poliuretano aplicado em Enrijecedores à Flexão apresenta
um comportamento mecânico bastante complexo, apresentando comportamento em
equilíbrio regido por uma equação constitutiva hiperelástica, sujeito ainda a efeitos
viscoelásticos que alteram a sua resposta em função da taxa de solicitação. Além
disso, o elastômero de poliuretano ainda está sujeito a perda de rigidez e deformações
residuais pelo efeito Mullins.
Apesar destes diversos fenômenos intrínsecos do comportamento mecânico
do elastômero de poliuretano, os Enrijecedores à Flexão são usualmente
dimensionados utilizados formulações clássicas da Mecânica dos Sólidos, ou seja,
considerando que o comportamento deste material elastomérico é regido pela Lei de
Hooke. Embora esta simplificação venha sendo utilizada com sucesso para avaliar o
comportamento global do Enrijecedor à Flexão, a não consideração completa destes
fenômenos característicos de materiais elastoméricos podem ser a causa da não
compreensão de determinadas falhas ocorridas neste tipo de equipamento.
De forma a fornecer informações suficientes para o correto dimensionamento
detalhes construtivos de Enrijecedores à Flexão, foi desenvolvido um modelo visco-
hiperelástico e de efeito Mullins para predizer o estado de tensão e deformação do
elastômero de poliuretano em carregamentos cíclicos em diferentes níveis de
deformação e taxas de carregamento.
O modelo desenvolvido demonstrou possuir uma boa robustez, pois este foi
aplicado com sucesso para variedades distintas de elastômero de poliuretano, mesmo
em casos em que haviam disponíveis dados experimentais escassos. Além disto, o
modelo desenvolvido demostrou a importância de se determinar a natureza da
solicitação aplicada ao material, pois sua resposta é bastante diferenciada,
despendendo se esta é controlada por tensão ou por deformação.
Evidentemente, os resultados obtidos neste trabalho não totalizam o
conhecimento completo do comportamento mecânico do elastômero de poliuretano.
Alguns exemplos das diversas questões que ainda estão em aberto estão listadas
abaixo:
Todos os resultados apresentados neste trabalho consideraram
apenas o comportamento em tração do elastômero de poliuretano. Um
estudo relevante a ser realizado é verificar se o modelo desenvolvido

166
é aplicável para predizer o comportamento deste material em
solicitações compressivas
O modelo desenvolvido indicou que o elastômero de poliuretano
apresenta um comportamento diferenciado se a solicitação é
controlada por tensão ou por deformação. Ensaios de fadiga
considerando estas duas naturezas de solicitação poderiam ser
realizados para verificar se esta diferenciação é significativa no
dimensionamento à fadiga de um componente composto por este
material.
Um fator importante nos ensaios de fadiga de materiais elastoméricos
é o período de aplicação de carga: se o período não for condizente
com sua utilização (por exemplo, 10 segundos para Enrijecedores à
Flexão), o resultado obtido pode não ser válido para a aplicação. Além
disto, devido à dissipação de energia dos efeitos viscoelásticos, se a
frequência de ensaio for elevada significativamente, a geração de
calor pode elevar a temperatura do material e consequentemente
alterar o seu comportamento mecânico. Com base no modelo
proposto neste trabalho, um modelo de predição de aumento de
temperatura pode ser formulado para auxiliar na definição de
condições de ensaio de fadiga de materiais elastoméricos.

167
Referências Bibliográficas
[1] World Energy Council, World Energy Resources – 2013 Survey, London, 2013.
[2] EPE – Empresa de Pesquisa Energética, Plano Decenal de Expansão de Energia
2022, Ministério de Minas e Energia, Brasil, 2013.
[3] Petrobras, Plano Estratégico Petrobras 2030, Rio de Janeiro, Brasil, 2014.
Disponível em: <http://www.petrobras.com.br/pt/quem-somos/estrategia/plano-de-
negocios-e-gestao/>. Acesso em 21 jul. 2014.
[4] LEMOS, C. A. D, Análise de Fadiga em Risers Flexíveis, Tese de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005.
[5] PRISACARIU, C., Polyurethane Elastomers: From Morphology to Mechanical
Aspects, Springer Wien, New York, 2011.
[6] BOEF, W. J. C., OUT, J. M. M., “Analysis of a Flexible-Riser Top Connection with
Bend Restrictor”. In: Proceedings of the 22nd Offshore Technology Conference,
OTC 6436, pp. 131-142, Houston, Texas, USA, May 1990.
[7] DEMANZE, F., HANONGE, D., CHALUMENAU, A., LECLERC, O., “Fatigue Life
Analysis of Polyurethane Bending Stiffeners”. In: Proceedings of 24th International
Conference on Offshore Mechanics and Artic Engineering, OMAE2005/OFT-
67506, Halkidiki, Greece, June 2005.
[8] MENICONI, L.C.M., LOPES, T.A.P., “Fatigue Analysis of Bend Stiffeners”. In:
Proceedings of 20th International Conference on Offshore Mechanics and Artic
Engineering, OMAE2001/OFT-1215, Rio de Janeiro, Brazil, June 2001.
[9] KIEPPER, B.O., Análise Estrutural Estática via Elementos Finitos de Segmento
Tubo Flexível-Enrijecedor, Dissertação de M. Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil, 2004.
[10] CAIRE, M., Análise de Enrijecedores à Flexão, Dissertação de M. Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005.
[11] CAIRE, M., Modelo de Comportamento Viscoelástico de Enrijecedores à
Flexão, Tese de D. Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2011.
[12] SOUZA, J.R., Análise Estrutural de Enrijecedores à Flexão de Geometria
Complexa Utilizados em Operações Offshore, Dissertação de M. Sc., USP, São
Paulo, SP, Brasil, 2008.
[13] LEITE, R.D., Análise de Enrijecedores à Flexão com Concentrador de
Tensões, Dissertação de M. Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2010.
168
[14] NARZUL, P., DUMAY, J.M., RIGAUD, J., “Contribution of Flexible Pipes and Riser
Systems to the Development of Subsea Hydrocarbon Resources”. In: Proceedings of
Offshore Technology Conference, OTC 8561, Houston, Texas, May 1997.
[15] INTERNATIONAL ORGANIZATION FOR STANDARDIZATION. Petroleum and
natural gas industries – Design and operation of subsea production systems –
Part 2: Unbonded flexible pipe systems for subsea and marine applications, ISO
13628-2, 2006.
[16] CAMPELLO, G. C., Metodologia de projeto para o sistema de ancoragem de
conectores de dutos flexíveis e proposição de nova tecnologia, Tese de D.Sc.,
COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2014.
[17] AMERICAN PETROLEUM INSTITUTE. Specification for Flexible Pipe Ancillary
Equipment, API 17L1, 2013.
[18] AMERICAN PETROLEUM INSTITUTE. Recommended Practice for Flexible
Pipe Ancillary Equipment, API 17L2, 2013.
[19] CANEVAROLO, S.V., Ciência dos Polímeros: Um texto básico para
tecnólogos e engenheiros, Artliber Editora, São Paulo, 2006.
[20] MANO E.B., MENDES, L.C., Introdução a Polímeros 2ª edição, Editora Edgard
Blücher, São Paulo, 1999.
[21] BURAK E., MARK J.E., ROLAND C.M. The Science and Technology of Rubber,
Forth Edition, Academic Press, Oxford, 2013.
[22] DROBNY J.G., Handbook of Thermoplastic Elastomers, Second Edition,
William Andrew, New Hampshire, 2014.
[23] AMERICAN SOCIETY FOR TESTING AND MATERIALS. Standard Test Method
for Rubber Property – Durometer Hardness, ASTM D2240-04, 2004.
[24] Smooth-On, Durometer Shore Hardness Scale, Easton PA, EUA, 2011.
Disponível em: <http://www.smooth-on.com/index.php?cPath=1370>. Acesso em 30
out. 2014.
[25] Grupo Tecnápolis, Revestimento de Rodas, Anápolis, Brasil, 2013. Disponível
em: <http://www.grupotecnapolis.com.br/pagina.php?i=servicos.php&id=9>. Acesso
em 30 out. 2014.
[26] MASE G.T., MASE G.E., Continuum Mechanics for Engineers, Second
Edition, CRC Press, Boca Raton, Florida, 1999.
[27] SHAW M.T., MACKNIGHT W.J., Introduction to Polymer Viscoelasticity, 3rd
Edition, Wiley-Interscience, New Jersey, 2005.
[28] BOWER A.F., Applied Mechanics of Solids, CRC Press, Boca Raton, Florida,
2009.

169
[29] VOLKENSTEIN, M.V., “Configurational Statistics of Polymer Chains”, Interscience,
New York, 1963.
[30] ARRUDA, E.M., BOYCE, M.C., “A Three Dimensional Constitutive Model for the
Large Stretch Behavior of Rubber Elastic Materials”, Journal of the Mechanics and
Physics of Solids Vol. 41 No. 2, pp. 389-412, 1993.
[31] GURTIN M.E., FRIED E., ANAND L. The Mechanics and Thermodynamics of
Continua, Cambridge University Press, New York, 2010.
[32] STEINMANN, P., HOSSAIN, M., POSSART, G., “Hyperelastic models for rubber-
like materials: consistent tangent operators and suitability for Treloar’s data”, Archive
of Applied Mechanics Vol. 82 Issue 9, pp. 1183-1217, 2012.
[33] BERTONI, F., Desenvolvimento de um módulo de compensação para ajuste
de deslocamento utilizando molas de poliuretano, Dissertação de M. Sc., UFRGS,
Porto Alegre, RS, Brasil, 2010.
[34] WARD I.M., SWEENEY J., An Introduction to the Mechanical Properties of
Solid Polymers, John Wiley & Sons Ltd, Chichester, West Sussex, 2004.
[35] BERGSTROM, J.S., BOYCE, M.C., “Constitutive Modeling of the Large Strain
Time-Dependent Behavior of Elastomers”, Journal of the Mechanics and Physics of
Solids Vol. 46 No. 5, pp. 931-954, 1998.
[36] BERGSTROM, J.S., BOYCE, M.C., “Large strain time-dependent behavior of filled
elastomers”, Journal of the Mechanics and Physics of Solids Vol. 32, pp. 627-644,
2000.
[37] BERGSTROM, J.S., BOYCE, M.C., “Constitutive Modeling of the Time-Dependent
and Cyclic Loading of Elastomers and Application to Soft Biological Tissues”,
Mechanics of Materials Vol. 33, pp. 523-530, 2001.
[38] MULLINS, L., “Softening of rubber by deformation”, Rubber Chemistry and
Technology Vol. 42 No.1, pp. 339-362, 1969.
[39] DIANI, J., FAYOLLE, B., GILORMINI, P., “A review on the Mullins effect”.
European Polymer Journal 45, pp. 601-612., 2009.
[40] DORFMANN, A., OGDEN, R.W., “A Constitutive Model for the Mullins Effect with
permanent set in particle-reinforced rubber”, International Journal of Solids and
Structures Vol. 41, pp. 1855-1878, 2004.
[41] BESDO, D., IHLEMANN, J., “Properties of rubberlike materials under large
deformations explained by self-organizing linkage patterns”, International Journal of
the Mechanics and Physics of Solids Vol. 19, pp. 1001-1018, 2003.
[42] QI, H.J., BOYCE, M.C., “Constitutive Model for stretch-induced softening of the
stress-stretch behavior of elastomeric materials”, Journal of the Mechanics and
Physics of Solids Vol. 52, pp. 2187-2205, 2004.

170
[43] OGDEN, R.W., ROXBURGH, D.G., “A pseudo–elastic model for the Mullins effect
in filled rubber”, The Royal Society A 455, pp. 2861-2878, 1999.
[44] LAZOPOULOS, K.A., OGDEN, R.W., “Nonlinear elasticity theory with
discontinuous internal variables”, Mathematics and Mechanics of Solids Vol. 3, pp.
29-51, 1998.
[45] HURTADO, J.A., LAPCZYK, I., GOVINDARAJAN, S.M., “Parallel rheological
framework to model non-linear viscoelasticity, permanent set, and Mullins effect in
elastomers”, Constitutive Models for Rubber VIII, pp. 95-100, 2013.
[46] AMERICAN SOCIETY FOR TESTING AND MATERIALS. Standard Test Method
for Tensile Properties of Plastics, ASTM D638-10, 2010.
[47] AMERICAN SOCIETY FOR TESTING AND MATERIALS. Standard Practice for
Conditioning Plastics for Testing, ASTM D618-13, 2013.
[48] VAZ, M.A., FERREIRA, M., CÓS, C.A., CAIRE, M., Caracterização do
Comportamento Viscoelástico do Poliuretano Utilizado em Bend Stiffeners,
Projeto de pesquisa Petrobras/Cenpes, COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 204.
[49] Isight 5.8-1. Dassault Systèmes, 2013
[50] LUBLINER, J., Plasticity Theory, Dover Publications, New York, 2008.
[51] QI, H.J., BOYCE, M.C., “Stress-strain behavior of thermoplastic polyurethanes”,
Mechanics of Materials Vol. 37, pp. 817-839, 2005.