Embed Size (px)
DESCRIPTION
fd
Citation preview

ModelingAssumption
The car is moving in a straight line (1 degree of freedom)
The sensor will measure the distance between the target vehicle and the ACC vehicle
The measured distance will be the input to the system
There is at most one target vehicle within the radar range
The user of the ACC vehicle chooses the desired maximum speed and it remains constant
There is no response time in the system

Process & ControlThe ACC in the vehicle starts working by the user setting a maximum speed; This speed
will never be exceeded regardless of whether there is a target vehicle detected in front of the
ACC vehicle or not. The sensor detects the distance between the ACC and the target vehicle in
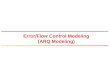
front of it. This distance is the input to the incremental velocity-distance function, graph shown
in the figure below. The function gives the incremental velocity depending on whether the
measured distance is higher or lower than the critical distance. The incremental velocity is the
velocity that needs to be subtracted from the maximum velocity in order to reach the desired
velocity for the vehicle. That velocity is then compared to the actual velocity to see if the vehicle
needs to accelerate (if Vdesired>Vactual) or decelerate (if Vdesired<Vactual) or keep the same velocity (if
Vdesired=Vactual). It should be noted that this graph changes for every value of Vmax.
Incremental Velocity vs. Distance
X (m)
Velocity (m/s)
Xc
Vmax
X1
V(X1)
Xmin
Figure 1 Incremental Velocity vs. Distance
Steps to get Vdesired:
Set Vmax
Measure X (from sensor)
Get V ( x )=V max
X c−X min(X ¿¿c−X)¿
Get Vdesired =Vmax – V(x)

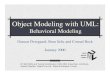
The following block diagram shows the structure of the system.
Figure 2 Block Diagram