Embed Size (px)
Citation preview
Author: Dr.ir.S.A.Miedema
MODELLING AND SIMULATION OF DREDGING PROCESSES AND SYSTEMS Miedema, S.A.
Abstract
The Dredging Research Facilities of the Laboratory of Soil Movement and Bulk Transport of Delft University of Technology can be and are used for: fundamental research, applied research and feasibility studies. The research can be carried out by the university or in cooperation with dredging industry. Students can be involved in the research as part of their education. Dredging vessels, including the anchoring system, floating pipeline or drag-arm and head construction, can be considered to be complex systems, including complex physical processes. The result of the modelling of a dredging system is a mathematical model describing the system behaviour. The mathematical model can be made operational by means of simulation software. The primary arm of modelling and simulation of dredging system is to provide the user with the ability to estimate the behaviour of the dredging system. This can be used for cost calculation, optimising working methods, developing new equipment or scientific research. In dredging systems, the physical processes play a dominant role. Thus modelling a dredging system may include physical research. Since research has many different aspects, it is important to use a method to distinguish the different phases that should be carried out consecutively. The development of simulation software consists of a number of levels, including software engineering, the modelling of complex dredging processes, the modelling of basic processes and physical research. These levels consist of a number of consecutive phases, including a requirements analysis, a problem or process analysis, a design or modelling phase, an implementation or physical research phase and a verification and validation phase. This paper reflects some thoughts of the author with respect to a systematic approach to the development of simulation models. This approach has been used for the development of a number of simulation models, including DREDMO software package that is used to illustrate methodology developed.
Introduction
Universities have two major goals: scientific research and education. Scientific research includes the development of the mathematical description of systems and their behaviour. Education includes teaching students a systematic approach to problem solving. Systems can be sub-divided into sub-systems, which may include physical processes. The mathematical description of a system may be so complex that computer programs will have to be used to simulate the system behaviour. Dredging vessels, including the anchoring system and floating pipeline, can be considered to be complex systems. The primary arm of modelling and simulation of dredging processes and systems is to provide the user with the ability to estimate the behaviour of the dredging processes or system, without the necessity of carrying out costly research or prototype tests.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
The result of the modelling of dredging processes and/or systems is a mathematical model describing the processes and/or systems. The mathematical model can be made operational by means of simulation software. The user of this simulation software may be a dredging contractor, a dredge builder, a research institute, a consultancy firm or an educational institute. The simulation software can be used for estimating with respect to production and cost calculation, optimising the working method, the development of new equipment, the development of automation systems, education, process simulation, scientific research, and accumulation of knowledge. In complex dredging systems, the physical processes play a dominant role. The way a physical process has to be modelled depends on the purpose for which the system model is intended, on the complexity of the system and on the system boundaries. However, process modelling should always be based on the most accurate and detailed mathematical process description possible. On the basis of a detailed process description and depending on the purpose of the simulation model a choice can be made between the implementation of a simplified or a detailed process description in the simulation model. It must, however, be realised that modelling is an attempt to describe reality without having any presumption of being reality. From the above it follows that two main issues have to be considered. The first is Software Engineering. The second is Process Modelling, which encompassing Physical Research. This paper reflects some thoughts of the author with respect to a systematic approach to the development of simulation models, including physical research and gives an explanation of the different phases of modelling. This is illustrated by the DREDMO software package (Miedema, Journee & Schuurmans14), because this software package simulates a complex dredging process and it is well known in Dutch dredging industry. The physical research is illustrated by research into the cutting process in sand (Miedema10).
Software Engineering
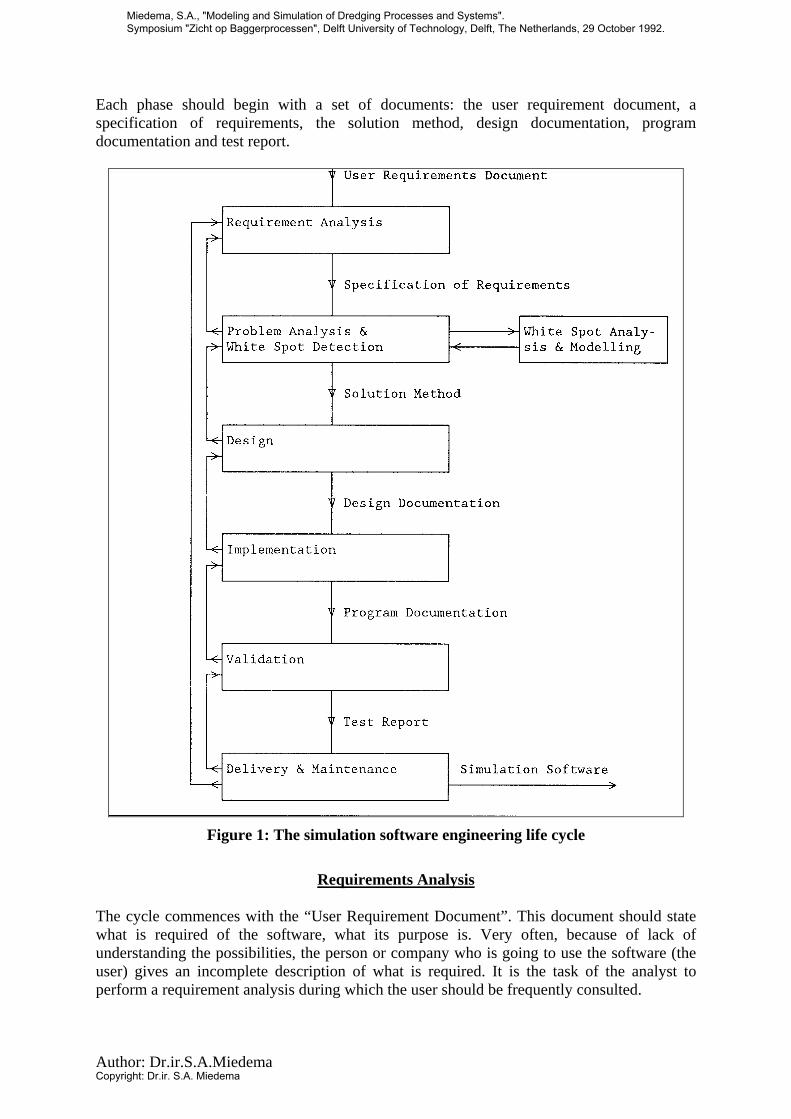
Complex software is created by using an engineering approach which can be viewed as a multi-stage process in which the output of one stage becomes the input to the next stage. This process is often referred to as the Software Engineering Life Cycle. Figure 1 shows a simplified version of this cycle. In practice the software engineering life cycle may be more complex than the one in Figure 1, however this approach will serve the purpose of this paper. The way the cycle is depicted shows that a number of consecutive phases are carried out: requirement analysis, problem analysis and unknown process factor detection (white spot detection), white spot analysis and modelling, design, implementation, validation, delivery and maintenance.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Each phase should begin with a set of documents: the user requirement document, a specification of requirements, the solution method, design documentation, program documentation and test report.
Figure 1: The simulation software engineering life cycle
Requirements Analysis
The cycle commences with the “User Requirement Document”. This document should state what is required of the software, what its purpose is. Very often, because of lack of understanding the possibilities, the person or company who is going to use the software (the user) gives an incomplete description of what is required. It is the task of the analyst to perform a requirement analysis during which the user should be frequently consulted.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
The original user requirements are examined by the analyst and are tested for contradictions, ambiguities and internal inconsistencies. In particular, the functional and non-functional requirements will have to be identified. The requirements are refined and discussed with the user until the user and the analyst are in agreement with respect to the functionality of the software. Techniques to determine the requirements include: interviewing, observation and questionnaires. A professional analyst will also take future requirements into consideration. The requirement analysis should result in a “Specification of Requirements Document”. A simplified version of this document includes: an introduction, functional requirements, non-functional requirements, quality assurance and maintenance specification. The quality assurance will include testing procedures with which the software will be tested in agreement with the user. The user requirement for the DREDMO software package is:
- Software to simulate the behaviour of a cutter suction dredger (C.S.D) working under near-shore conditions for use on Personal Computers
From the requirement analysis the following requirements were found:
- The simulation software needs to predict the motions of a C.S.D and forces acting on a C.S.D (externally and internally).
- The software will be used to make estimates with respect to operation, design and research.
- The man-machine interaction should be as easy as possible. - The results of simulations have to be clearly presented. - The simulation software has to run on a MS-DOS computer. - The software has to be self-containing without having to rely on external software.
Problem Analysis & White Spot Detection
In the problem analysis phase, the analyst has to find a solution method for the problem. If the problem contains white spots in knowledge, these white spots have to be filled in first. The solution method depends on the type of problem. For instance: For instance: Is the problem linear or non-linear, can the problem be solved explicitly or implicitly, is it a typical frequency domain or a time domain problem, is a finite element or difference method required, is it perhaps a logistical or administrative problem or the combination of the above. For the DREDMO software package the problem analysis resulted in:
- The simulation of a C.S.D. under near-shore conditions has to be carried out by solving the equations of motion of the C.D.S. The equations of motion consist of 7-coupled non-linear integro differential equations, the “Cummins equations”1.
( ) ( ) ( ) ( ) ( )
( ) ( )t,X,V,AFtW
tXCdVtKtAmM
jjjkk
6
1j
t
jkjjkjjkjkj
+=
⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅+τ⋅⋅τ⋅τ−+⋅+∑ ∫
= ∞− (1)
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
- Since the equations of motion are non-linear they have to be solved in the time domain by means of implicit modified Newton-Raphson iteration method and the “teta” integration method.
- Because of the complexity of the calculations, the hydrodynamic coefficients (occurring in the left hand side of equations 1) will have to be calculated with a pre-processing program.
- Because of the complexity of the calculations, the wave forces (first term on the right hand side of equation 1) will have to be calculated with a pre-processing program.
- The external forces (second term on the right hand side of equations 1) contain white spots in knowledge.
- Because of the availability, post-processing will have to be carried out with a post-processing program.
- Because of the occurrence of different programs (pre-processing, calculation and post-processing) a user interface will have to be developed for easy access and data management.
For the DREDMO software package the white spot detection resulted in the following white spots in knowledge:
1. Cutting process 2. Hydrodynamical coefficients on the pontoon 3. Current forces on the pontoon 4. Connection spud pole sea-bottom and spud friction 5. Hydrodynamical coefficients on the ladder 6. Viscous roll damping 7. Second order wave forces 8. Floating pipeline forces
The cutting process will be the subject of the “Modelling of a Complex Dredging Process”. The hydrodynamic coefficients are calculated by a pre-processing program. The current forces on the pontoon, the spud behaviour and the hydrodynamic coefficients on the ladder are modelled making assumptions. The viscous roll damping, second order wave forces and floating pipeline forces still have to be modelled.
Design
In the design phase, the desired software will be designed by means of a design strategy such as the Top-down method, which is used in the examples that will be considered in this paper. The design phase should result in design documentation, for instance: a system manual and a user manual. For the DREDMO software package a design was made so that the package consists of a set of programs. These programs are:
- DREDMO USER INTERFACE (Input & Data Management) - SEAWAY-H (Previewing of Ship Hull Form) - SEAWAY-D (Calculation of Hydrodynamic Coefficients) - WAFOR (Calculate Wave Force Time Series) - DREDMO (Solve Equation 1) - PLOSIM (Graphical Presentation of DREDMO Output)
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
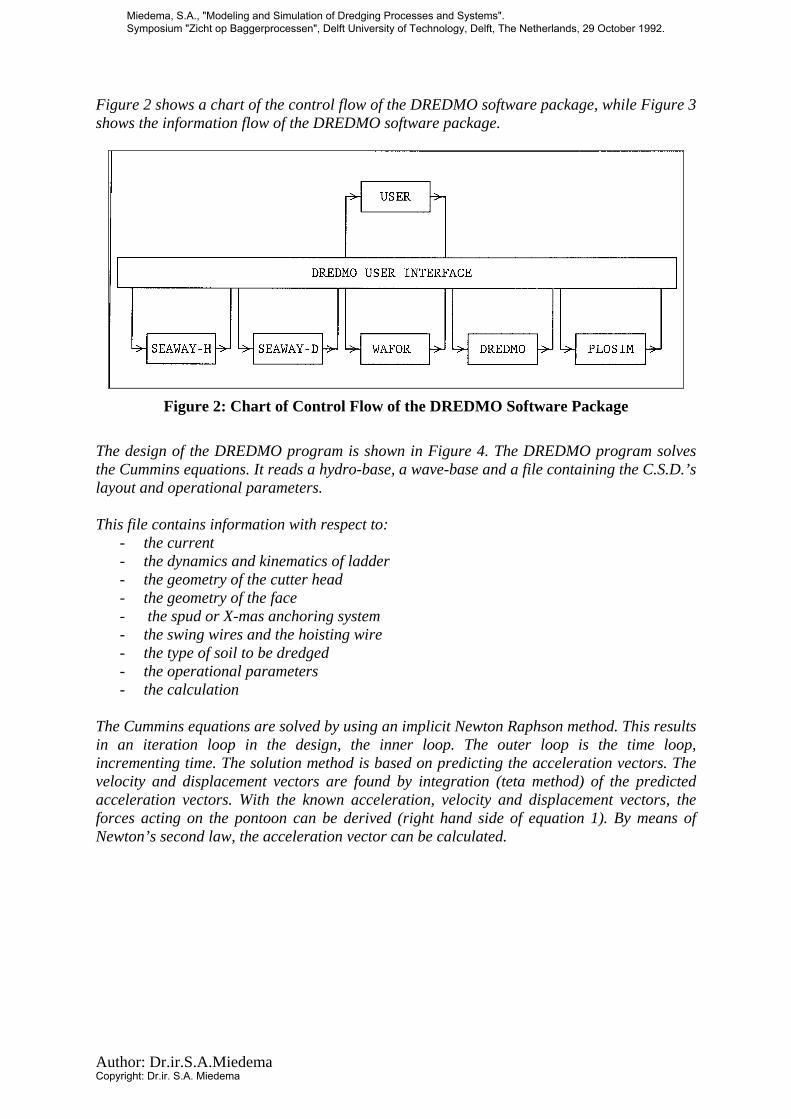
Figure 2 shows a chart of the control flow of the DREDMO software package, while Figure 3 shows the information flow of the DREDMO software package.
Figure 2: Chart of Control Flow of the DREDMO Software Package
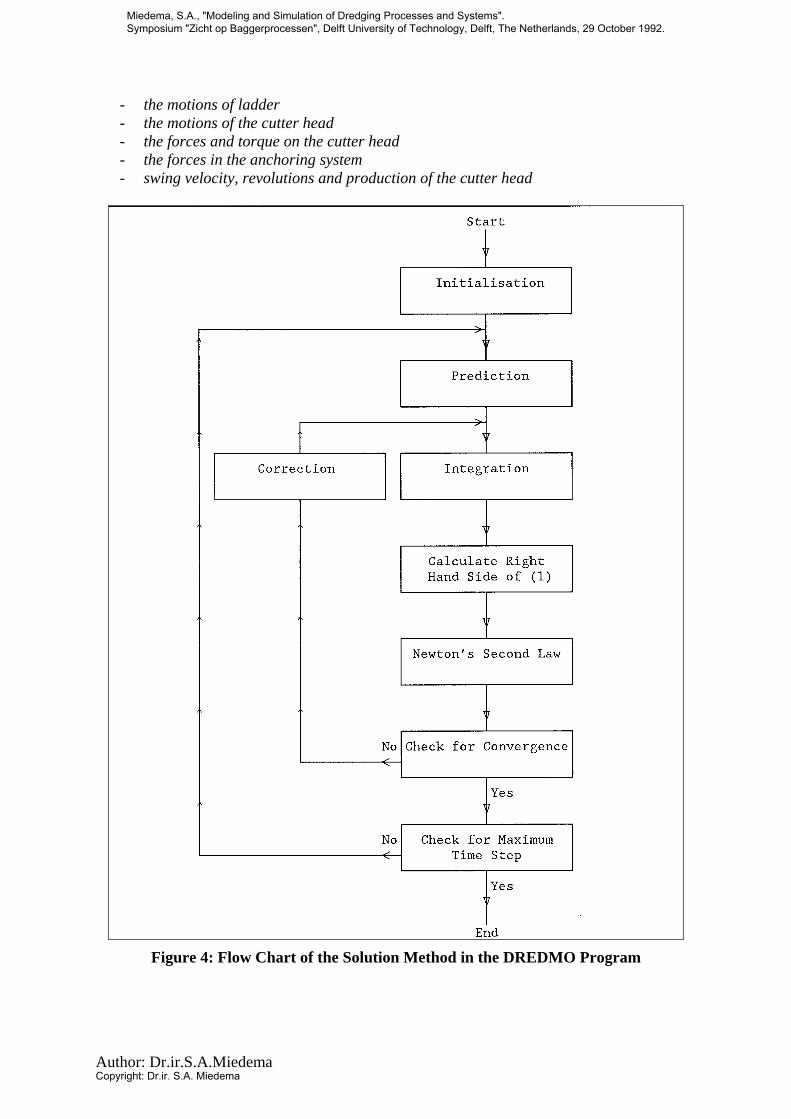
The design of the DREDMO program is shown in Figure 4. The DREDMO program solves the Cummins equations. It reads a hydro-base, a wave-base and a file containing the C.S.D.’s layout and operational parameters. This file contains information with respect to:
- the current - the dynamics and kinematics of ladder - the geometry of the cutter head - the geometry of the face - the spud or X-mas anchoring system - the swing wires and the hoisting wire - the type of soil to be dredged - the operational parameters - the calculation
The Cummins equations are solved by using an implicit Newton Raphson method. This results in an iteration loop in the design, the inner loop. The outer loop is the time loop, incrementing time. The solution method is based on predicting the acceleration vectors. The velocity and displacement vectors are found by integration (teta method) of the predicted acceleration vectors. With the known acceleration, velocity and displacement vectors, the forces acting on the pontoon can be derived (right hand side of equation 1). By means of Newton’s second law, the acceleration vector can be calculated.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
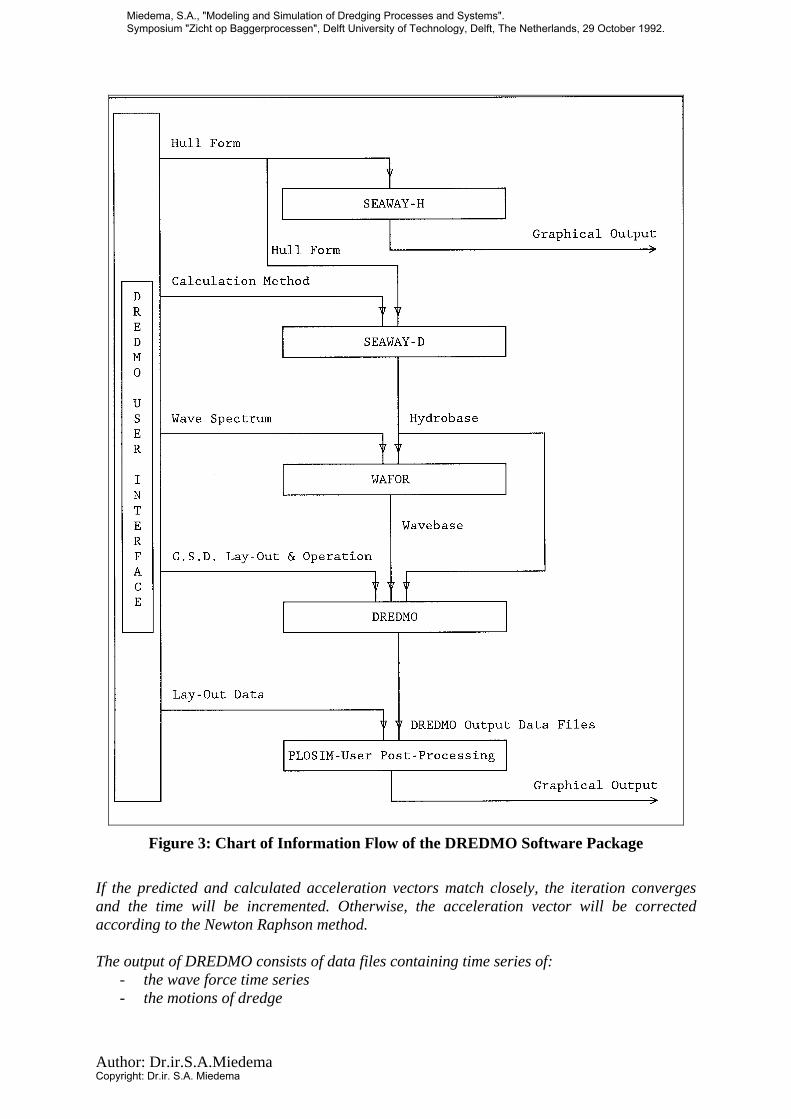
Figure 3: Chart of Information Flow of the DREDMO Software Package
If the predicted and calculated acceleration vectors match closely, the iteration converges and the time will be incremented. Otherwise, the acceleration vector will be corrected according to the Newton Raphson method. The output of DREDMO consists of data files containing time series of:
- the wave force time series - the motions of dredge
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
- the motions of ladder - the motions of the cutter head - the forces and torque on the cutter head - the forces in the anchoring system - swing velocity, revolutions and production of the cutter head
Figure 4: Flow Chart of the Solution Method in the DREDMO Program
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Implementation
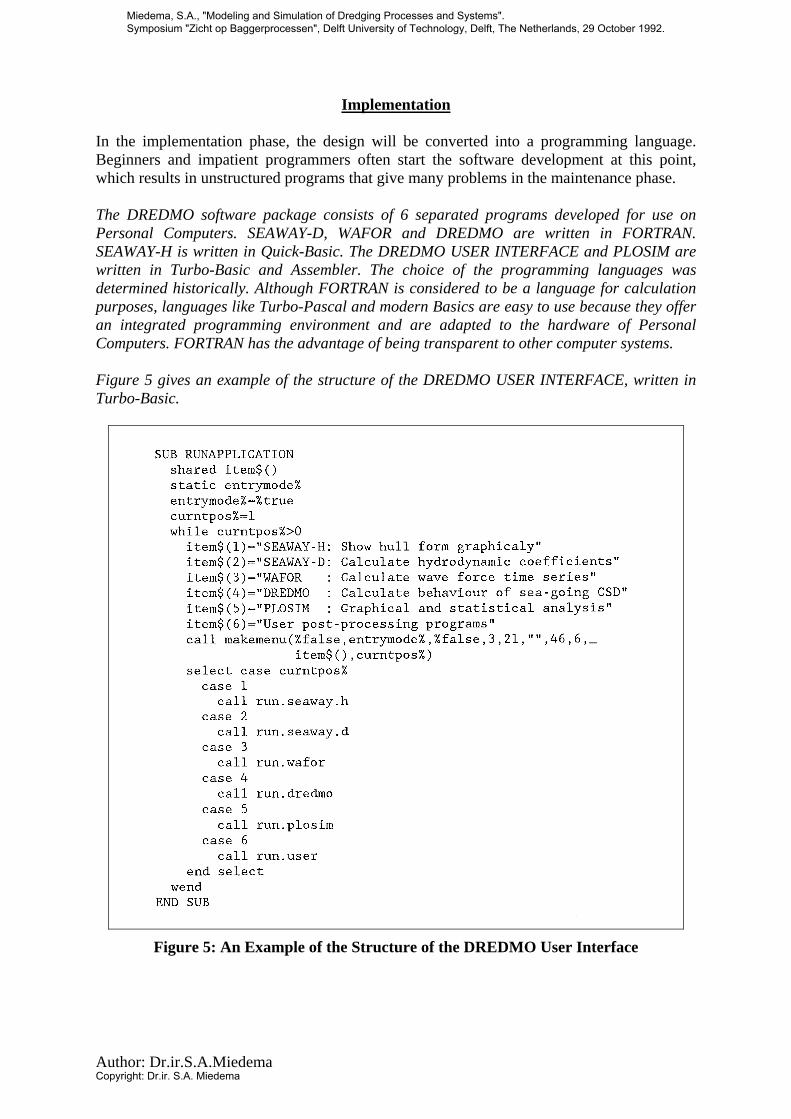
In the implementation phase, the design will be converted into a programming language. Beginners and impatient programmers often start the software development at this point, which results in unstructured programs that give many problems in the maintenance phase. The DREDMO software package consists of 6 separated programs developed for use on Personal Computers. SEAWAY-D, WAFOR and DREDMO are written in FORTRAN. SEAWAY-H is written in Quick-Basic. The DREDMO USER INTERFACE and PLOSIM are written in Turbo-Basic and Assembler. The choice of the programming languages was determined historically. Although FORTRAN is considered to be a language for calculation purposes, languages like Turbo-Pascal and modern Basics are easy to use because they offer an integrated programming environment and are adapted to the hardware of Personal Computers. FORTRAN has the advantage of being transparent to other computer systems. Figure 5 gives an example of the structure of the DREDMO USER INTERFACE, written in Turbo-Basic.
Figure 5: An Example of the Structure of the DREDMO User Interface
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Validation
The validation phase consists of testing that the software produces the expected output and matches the specification. Errors have to be detected and corrected. A test report should result. The DREDMO software package has been validated in three different ways:
- physical laboratory research into the dredging processes - comparison with other programs - prototype measurements
Laboratory research has been carried out with respect to the cutting process, the current forces and the hydrodynamic coefficients on the pontoon. The output of DREDMO has been compared with other time-domain and frequency domain programs, with respect to the behaviour of the anchored pontoon (without the ladder). Prototype measurements have been compared to the results of the DREDMO program. This method, although preferred, is very difficult, since input and output parameters have to be measured correctly. If one parameter is omitted, the value of the validation is arbitrary.
Delivery & Maintenance
The delivery & maintenance phase may continue throughout the life of a piece of software. Often the user asks for modifications and enhancements. This may involve extending the existing software or completely redesigning parts of it. The requirements may change during the life of the software, introducing feedback between the different stages of the software development. From experience it can be stated that software is never error free, so maintenance also involves error correction during the life of the software. However from the requirements analysis a distinct point should be defined at which the software is suitable for delivery. Extension and enhancement development should be carried out subsequently as supplementary projects. An important part of the DREDMO software package has been developed at the Delft University of Technology. Since the university environment is not a commercial one, the commercial activities relating to the package are handled by Delft Hydraulics. Delft Hydraulics has sold the package to a number of major Dutch Dredging Contractors. Coupled to the delivery of the package is a short course on the use of the package. Other models of the software engineering process exist what may have fewer or more phases than have been discussed. Most software developers, however, would be reasonably happy with the model presented here.
MODELLING OF A COMPLEX DREDGING PROCESS When considering a dredging system with respect to the development of simulation software, white spots in the knowledge of the dredging processes may occur. To fill in these white spots, existing theories can be modified, simplified or extended by making certain assumptions. However, this will not be sufficient in all cases, so physical processes will have to be described by mathematical models.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
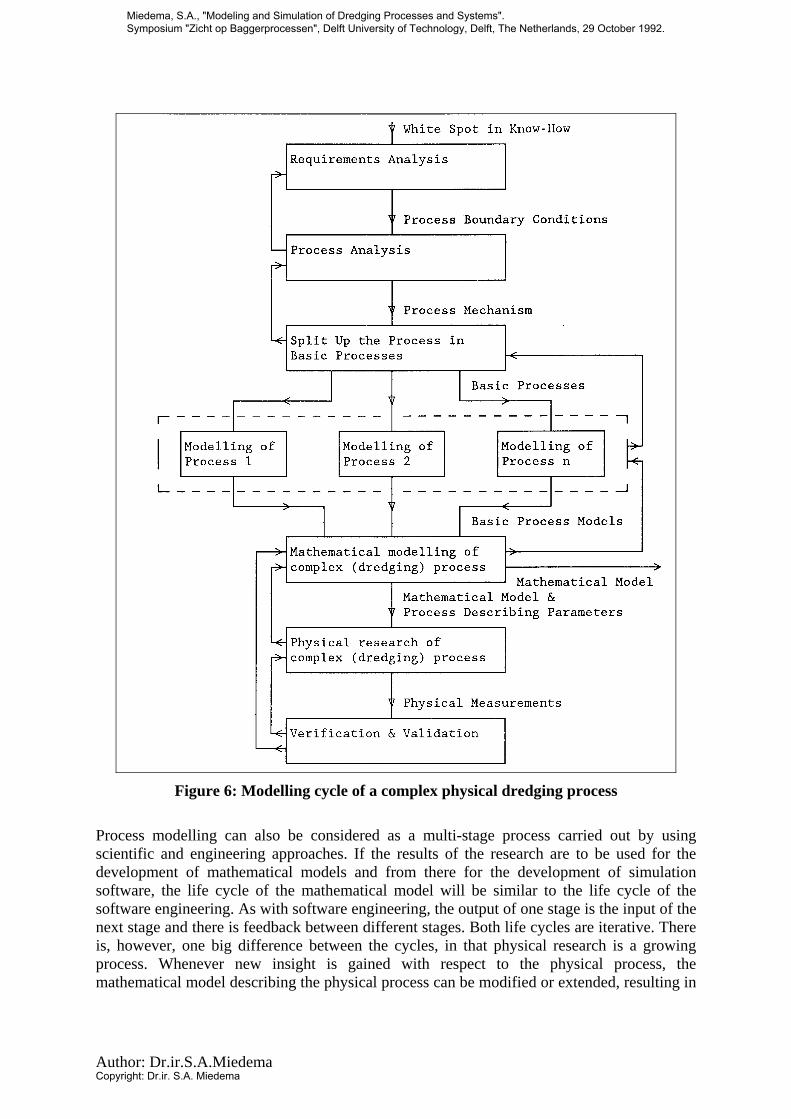
Figure 6: Modelling cycle of a complex physical dredging process
Process modelling can also be considered as a multi-stage process carried out by using scientific and engineering approaches. If the results of the research are to be used for the development of mathematical models and from there for the development of simulation software, the life cycle of the mathematical model will be similar to the life cycle of the software engineering. As with software engineering, the output of one stage is the input of the next stage and there is feedback between different stages. Both life cycles are iterative. There is, however, one big difference between the cycles, in that physical research is a growing process. Whenever new insight is gained with respect to the physical process, the mathematical model describing the physical process can be modified or extended, resulting in
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
an improved mathematical description of the process. In software development this may lead to deterioration in the structure of the software resulting in maintenance problems. Restructuring although costly is the only solution. The consecutive phases carried in the development of a mathematical model describing a complex physical dredging process are: requirements analysis, process analysis, splitting up the process in basic processes, modelling of basic processes, mathematical modelling of a complex process, physical research of a complex process, verification and validation. Figure 6 shows a simplified version of the modelling life cycle of a complex dredging process. The cutting process as implemented in the DREDMO program will be used as an example of this chapter.
Requirements Analysis
The requirements analysis defines the boundary conditions for the mathematical modelling of the complex (dredging) process. The boundary conditions determine the context in which the modelling is carried out and may influence the process mechanism as derived from the process analysis. The boundary conditions determine how detailed the process mechanism should be in the context of the system model. A sea-going C.S.D. is submitted to wave forces resulting from a wave energy density spectrum. With respect to the wave period, the wave energy is concentrated in a small area from 2 to 15 seconds. An external force with a periodic character will only influence the motions of the dredge if the period is in the range mentioned. Shorter and longer periods will be filtered out in the simulation program because the C.S.D. behaves like a band-pass filter. A mathematical model which generates periodical forces with a period far outside the above mentioned range is of no use, since this does not affect the response of the C.S.D. and even worse it delays the calculation process.
Process Analysis The result of the process analysis is the process mechanism. Although the process is part of reality, the process mechanism as used for the simulation program may only describe part of the reality, as required by the boundary conditions defined in the requirements analysis. A complex process may consist of multiple interacting basic processes. The process may have a complex geometry. Depending on the range of the operational parameters, the process may also consist of multiple process mechanisms within one basic process. The cutting process consists a number of processes:
- the cutting process with a cutter head - face instability - erosion - hydraulic aspects
The cutting process is assumed to be dominant with respect to the cutting forces. The cutting process of a cutter head however is not the basic process.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Split Up The Process In Basic Processes Complex dredging processes are a combination of basic processes with a complex geometry. To model the complex process, a mathematical description of the basic processes should be available. To derive these mathematical descriptions, the complex dredging process will have to be split up into basic processes. After the mathematical description of the basic processes has been derived, these descriptions can be extrapolated for a complex geometry and combined in a mathematical description of the complex dredging process. The cutting process of a cutter head with respect to the cutting forces is dominated by the cutting of soil. A cutter head of a dredging wheel has a complex geometry, with curved blades, a varying layer thickness and a varying cutting velocity. The cutting of soil with a straight blade, a constant cutting velocity and a fixed layer thickness can be considered the basic process.
Modelling of Process n
The modelling of basic processes is described in the chapter “Modelling of a Basic Process”. In this chapter the cutting of soil with a straight blade, a constant cutting velocity and a fixed layer thickness will be considered.
Mathematical Modelling of Complex Dredging Process The mathematical modelling of a complex dredging process consists of determining the interaction of the basic processes and the extrapolation of basic processes to the geometry of the complex process. Since, geometrical extrapolation is usually based on assumptions, physical research is required to verify the model. Basic models may be two-dimensional, neglecting side effects. To give sufficient understanding of the process involved, the mathematical modelling should be as detailed as possible. This allows simplifications following from the boundary conditions resulting from the requirements analysis. The mathematical model of the basic cutting process can be applied to a cutter head, assuming that the layer thickness of the soil cut is very small compared to the size of the blades, meaning that the curvature of the blades does not influence the cutting process. By integrating the cutting forces acting on a blade element, an analytical or numerical model for the resulting cutting forces on the cutter head can be derived. Since as a result of the rotation of the cutter head the cutting forces are periodic with the blade frequency, the model derived describes this periodical character. Because the blade frequency lies far outside the wave energy range, as mentioned in the requirements analysis, the forces should be averaged for use in the DREDMO model.
Physical Research of Complex Dredging Process As mentioned before, a complex dredging process is a combination and interaction of basic processes and a complex geometry. Each basic process may have consecutive stages. For instance the cutting process can be non-cavitating or cavitating, depending on operational parameters like the cutting velocity. The settling of grains may be laminar or turbulent, depending on parameters like the grain size. Since different basic processes may occur
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
simultaneously, in order to get the correct interaction between the basic processes, the stage at which they occur in prototype should be the same as during the physical research. The best way of achieving this is to carry out the physical research in prototype. As in many cases, this is impossible, the physical research of a complex dredging process will contain compromises and contradictions with respect to model rules. The chapter “Physical Research” describes the stages out of which physical research may consist. De Koning7, 8 gives an overview of the different dredging processes and of the possible research that can be carried out at the Laboratory of Soil Movement.
Verification & Validation The verification should ensure that the mathematical description of the complex dredging process matches the observation resulting from the physical research. Since physical research often contains compromises and contradictions with respect to model rules, the validity of the mathematical model is restricted to the scale at which the research is carried out. Extrapolation to another scale (for instance prototype scale) may give improper results. A good example of this is the research on the subject of hydraulic transport. If the physics of the process are sufficiently understood reliable predictions may be achieved in prototype scale, this however only affects the validity of a mathematical process description if a prototype verification has been carried out. With sand cutting in prototype very often the cavitating cutting process occurs. On a model scale it is difficult to generate this process, unless very high cutter revolutions are used. This influences the way the cutting process, erosion and hydraulic effects interact.
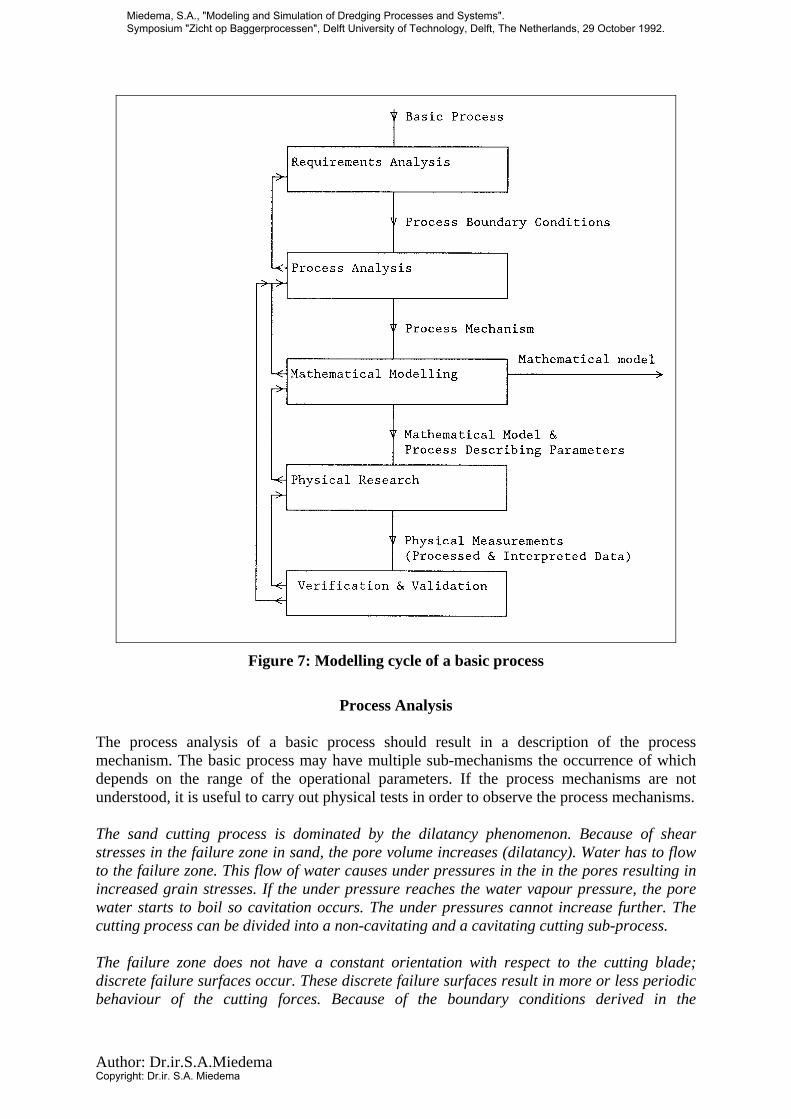
MODELLING OF A BASIC PROCESS The consecutive phases carried out in the developing of a mathematical model describing a basic process are: a requirement analysis, a process analysis, the mathematical modelling, physical research, verification and validation. Figure 7 gives an impression of the modelling life cycle of a basic process.
Requirements Analysis The Requirements Analysis again defines the boundary conditions, in this case for the mathematical modelling of the basic process. The boundary conditions determine the context in which the modelling is carried out and may influence the process mechanism derived from the process analysis. The boundary conditions determine how detailed the process mechanism should be in the context of the system model and the complex process. The system model of the sea-going cutter dredge only requires periodic forces with a period between 2 to 15 seconds. The complex cutting process requires integration of the cutting forces on a straight blade. This is the stationary cutting process. From these conditions it can be concluded that the modelling of the basic cutting process should result in average cutting forces. The cutting process will be considered to be a two dimensional process.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Figure 7: Modelling cycle of a basic process
Process Analysis
The process analysis of a basic process should result in a description of the process mechanism. The basic process may have multiple sub-mechanisms the occurrence of which depends on the range of the operational parameters. If the process mechanisms are not understood, it is useful to carry out physical tests in order to observe the process mechanisms. The sand cutting process is dominated by the dilatancy phenomenon. Because of shear stresses in the failure zone in sand, the pore volume increases (dilatancy). Water has to flow to the failure zone. This flow of water causes under pressures in the in the pores resulting in increased grain stresses. If the under pressure reaches the water vapour pressure, the pore water starts to boil so cavitation occurs. The under pressures cannot increase further. The cutting process can be divided into a non-cavitating and a cavitating cutting sub-process. The failure zone does not have a constant orientation with respect to the cutting blade; discrete failure surfaces occur. These discrete failure surfaces result in more or less periodic behaviour of the cutting forces. Because of the boundary conditions derived in the
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema

Author: Dr.ir.S.A.Miedema
requirements analysis, the cutting process should be considered as a stationary process with a fixed failure surface.
Mathematical Modelling The mathematical modelling of the basic process should be the mathematical description of the process mechanisms found in the process analysis. The mathematical description should be as detailed as possible, allowing simplification in a later stage of the modelling sequence. For sand cutting the following mathematical description was found for the non-cavitating cutting process:
m2icw1h kebhvgcF ⋅⋅⋅⋅⋅ρ⋅= (2)
m2icw2v kebhvgcF ⋅⋅⋅⋅⋅ρ⋅= (3)
For the cavitating cutting process the following equations were derived:
( ) bh10zgdF iw1h ⋅⋅+⋅⋅ρ⋅= (4)
( ) bh10zgdF iw2v ⋅⋅+⋅⋅ρ⋅= (5)
The sand cutting model used in the research was much more complicated, including finite element calculations of the under pressure distribution in the sand bed.
Physical Research The chapter “Physical Research” describes the stages of the physical research. The sand cutting process will be taken as an example.
Verification & Validation In the verification phase the data acquired is compared with the mathematical model. Discrepancies are almost always found. The process analysis will have to be evaluated and compared with the test results to find these discrepancies with respect to the process mechanism. The process mechanism, and thus the mathematical model, will have to be adjusted (tuned) to the result of the tests, since the tests are physical reality. The range of the independent process parameters will have to match the prototype range if possible, to validate the mathematical model for prototype conditions. This has implications for the test stand design. The mathematical model for sand cutting was verified with respect to cutting forces, under pressure distribution and soil mechanical properties. The mathematical process description in particular was adjusted with respect to the under pressure distribution.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Except for the water depth, the range of the operational parameters was chosen according to the prototype range. In general, mathematical model matched the test results very well leading to the conclusion that the model is valid for use in dredging practice. Application of the model to cutter heads, dredging wheels and clamshells also gave a good correlation, supporting the validity.
PHYSICAL RESEARCH Physical research should be carried out as fundamental as possible. Empirical mathematical models, although valuable for practical purposes, do not result in an improved understanding of the physical process in the long term.
Dependent & Independent Process Parameters
The mathematical description of a physical process contains dependent and independent process parameters. Independent parameters are not influenced by the process but control it. The values of the independent parameters also determine which sub-process mechanism will occur. This sub-process mechanism should be the same in the prototype as during the physical research; otherwise the validity of the modelling is arbitrary. Dependent parameters are determined by the process and by the value of the independent parameters controlling the process. The independent process parameters can be sub-divided into:
- Constants - Material parameters (Properties) - Geometrical parameters - Operational parameters
The dependent process parameters can be sub-divided into:
- Explicit parameters (measured directly) - Implicit parameters (derived)
From the sand cutting model, the following parameters are assumed to be constants:
- density of water - gravitational constant - atmospheric pressure
The material properties of sand are:
- internal friction angle - soil/interface friction angle - initial & maximum porosity - initial & maximum permeability - dilatation
The geometrical parameters are:
- width & height of the blade - blade angle
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
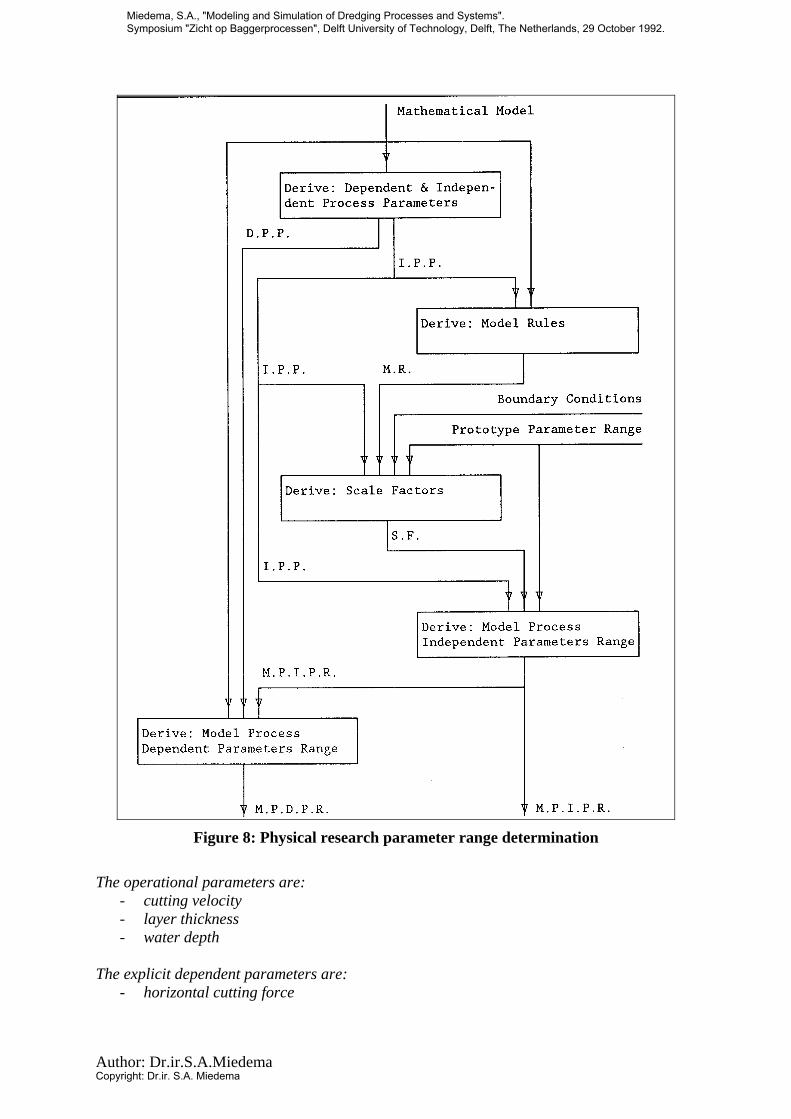
Figure 8: Physical research parameter range determination
The operational parameters are:
- cutting velocity - layer thickness - water depth
The explicit dependent parameters are:
- horizontal cutting force
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema

Author: Dr.ir.S.A.Miedema
- vertical cutting force The implicit dependent parameters are:
- soil/interface normal force - soil/interface friction force
Model Rules
Model rules are very important in determining the value of modelling and physical research. Unless research is to be carried out on a prototype scale, the model rules and scale factors determine what the process mechanism will be during the physical tests. Model rules should not be based on a dimension analysis using dimensionless numbers such as the Raynolds or Froude number, but on a proper understanding of the process mechanisms involved (the mathematical model). Dimensionless numbers, if applicable, should be the result of this. Since the sand cutting process can appear as a non-cavitating or a cavitating process, depending on the value of the operational parameters, model rules will have to be based on the transition between these two sub-processes (Miedema10). In this way it is ensured that the occurrence of a sub-process in prototype will be reproduced on a model scale. Another example of this is the sedimentation (settling) of grains, important in dredging processes like hydraulic transport and hopper loading. The settlement of individual grains may be laminar or turbulent, depending on the grain size. When deriving model rules and scale factors from the mathematical description of a process, care should be taken, that the sub-process occurring in prototype is reproduced on a model scale.
Scale Factors Scale factors should also be based on preserving the occurrence of sub-processes on prototype scale. The scale factors depend on the model rules, the independent process parameters, the range at which these parameters are valid in prototype and boundary conditions. The boundary conditions limit the choice of the scale factors. Very often the space available to build a test rig and the funds available are limiting factors. It should however be ensured that the prototype sub-processes will occur otherwise the research results cannot be applied to the prototype scale. If a length scale is chosen for the geometry of a model blade, this scale could also be applied to the grain size. It is known, however, that above a certain diameter, grains have a sandy character. If the grain size is smaller, soil behaves like silt or clay with a different cutting mechanism. By scaling sand, the soil mechanical properties will be changed in an unpredictable way. It is therefore advisable to use a prototype process medium in model scale tests.
Model Process Independent Parameter Range (M.P.I.P.R) The model process independent parameter range is determined by the scale factors, the independent process parameters and by the range at which these parameters occur in prototype. The model process independent parameter range determines the choice of transducers and the geometry and operational parameters of the test stand.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Model Process Dependent Parameter Range (M.P.D.P.R)
The model process dependent parameter range should be determined by the mathematical model, the dependent process parameters and by the model process independent parameter range. It is not desirable to take the prototype range and some scale factor based on dimension analysis in order to derive the model process dependent parameter range, since this may be in contradiction with the mathematical model.
Choose: Transducer, Signal Conditioning & Data Acquisition The choice of transducers is a very important part of physical research. Transducers are usually designed to transform a physical property into an electrical signal within a certain range of the physical property. Transducers have both absolute and relative accuracy. The absolute accuracy always results in an absolute error, while the relative accuracy results in an error related to the magnitude of the physical property in relation to the range of the transducer. Transducers should be chosen to match the independent and dependent model process parameter ranges, minimizing the errors. The output of transducers is usually an electric signal. This signal may have a very small magnitude or may not directly represent the physical property measured. As a result of transporting the signal over some distance, the signal may be distorted (white noise), which introduces error. To represent the physical properties measured and to reduce white noise, signals have to be conditioned before they are processed. Very often the data acquisition system allows signals within a range of 0 – 10 Volts. It is advisable to condition the signals close to the transducers so that the parameter ranges of the physical properties measured match the input range of the data-acquisition system. Signal conditioning can also contain analogue filters (low pass) to eliminate high frequencies (white noise). The data-acquisition system transforms continuous analogue signals into discrete digital signals, suitable for processing with a computer. Important characteristics of a data-acquisition system are the possible input ranges, the maximum sample frequency and the resolution. Modern systems have input ranges of 0 - +10 V; -10 - +10 V; 0 - +5 V; -5 - +5 V; etc. The sample frequency can be up to hundreds of MegaHertz, however for most applications cheaper systems up to 100 kHz are available. The resolution determines the accuracy with which a signal value can be represented digitally. A resolution of 12 bits means that a value has an accuracy of the input range divided by 212. For example if the input range is 0 - +10 V and the resolution is 8 bits, the accuracy is ± 20 mV. This is important with respect to the total accuracy of the measurement system. The sample frequency is important for the measurement of the dynamic aspects of the physical process. If the physical process contains periodic sub-processes the sample frequency must be at least twice the frequency of the periodic sub-process. Another problem that might occur is aliasing. To avoid aliasing, the signal conditioning should contain analogue filters at half the sample frequency.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
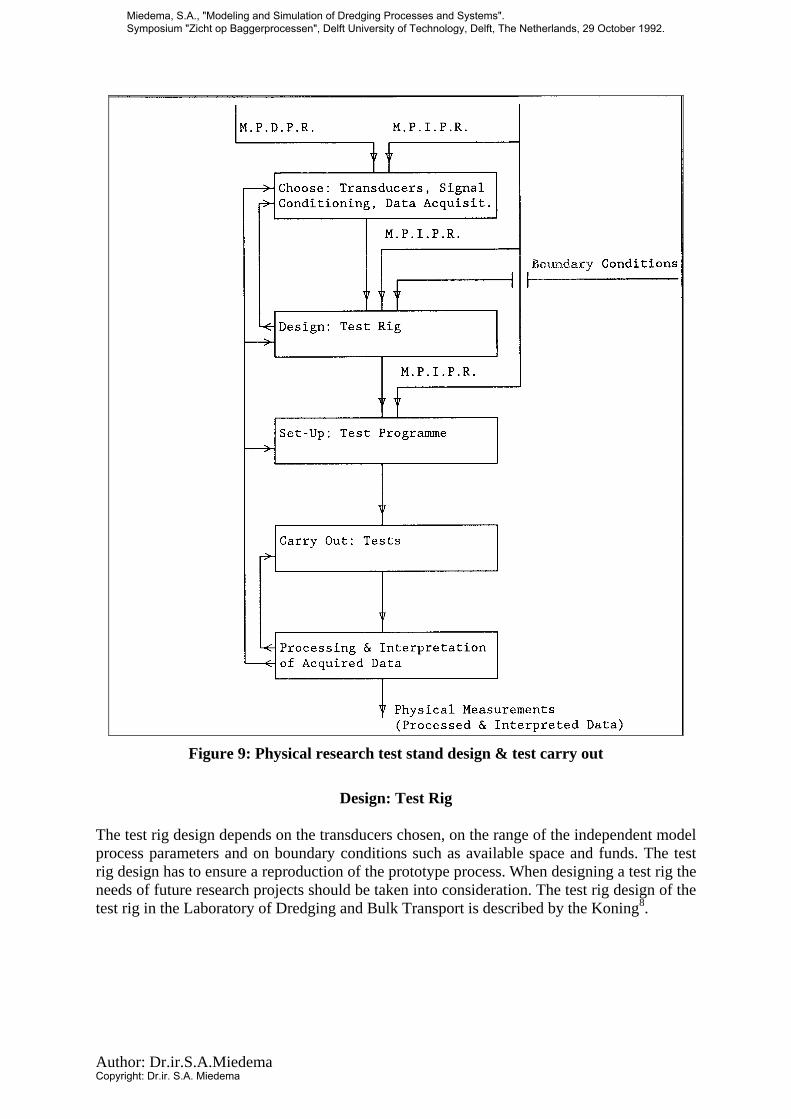
Figure 9: Physical research test stand design & test carry out
Design: Test Rig
The test rig design depends on the transducers chosen, on the range of the independent model process parameters and on boundary conditions such as available space and funds. The test rig design has to ensure a reproduction of the prototype process. When designing a test rig the needs of future research projects should be taken into consideration. The test rig design of the test rig in the Laboratory of Dredging and Bulk Transport is described by the Koning8.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
Set-up: Test Programme The test programme is determined by the facilities of the test rig. The test program should be the result of the model process independent parameter range ensuring the occurrence of the prototype process. This determines the validity of the research results.
Carry out: Tests Tests have to be carried out according to a predefined programme. It is very important that each test has a well-determined starting point, for instance the soil mechanical properties of a sand bed. Independent parameters should be controlled during a test and adjusted or kept constant as required.
Processing & Interpretation of Acquired Data The data acquired will be processed with a computer and interpreted. The processing is very often carried out on-line. As soon as a test has been completed the first conclusions can be drawn. If a test has failed it can be repeated. If a test gives unexpected results this may give feedback to the test programme.
CONCLUSION From the analysis of the development of the software for the simulation of the behaviour of complex dredging systems, some conclusions can be drawn. The order in which the conclusions occur reflects the structure of the flow charts in this paper.
- Dredging processes play a dominant role in the system behaviour, so it is essential to understand these processes.
- If there are unknown process factors (white spots), these should be modelled first. - If the white spots in knowledge concern complex dredging processes, these should be
split up in basic processes. - First the mechanism of the basic process should be known, then a mathematical
description should be derived. - The mathematical model contains independent and dependent parameters. It is
important to know these parameters to be able to derive model rules and scale factors and to determine which transducers (sensors) are required for physical research.
- It is of the utmost importance that a process on a model scale occurs with a similar process mechanism as it would on a prototype scale. Model rules and scale factors should be derived, base on this conclusion.
- The process medium should be the medium as it occurs on prototype scale - Test should be carried out to verify and validate the mathematical description of the
process involved. - When the basic processes are modelled, they can be combined and extrapolated to a
complex geometry in order to model the complex process, including the interaction of the basic processes.
- Again tests should be carried out to verify and validate the mathematical description of the complex process involved.
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
- If all the white spots are modelled, the software can be designed and implemented including the derived process models.
Since problems to be solved differ, solving these problems may require adjustments to the structure of the problem solving method as described in this paper. It is, however, the experience of the author that using this method saves time and disappointments.
BIBLIOGRAPHY
(1) Cummins, W.E., “The Impulse Response Function and Ship Motions”. Symposium on Ship Theory, Institut fur Schiffbau der Universitat Hamburg, Germany, 25 – 27 January 1962
(2) Journee, J.M.J. & Miedema, S.A. and Keuning, J.A., “DREDMO, A Computer Program for the Calculation of the Behaviour of Seagoing Cutter Suction Dredgers”. T.U. Delft & Delft Hydraylics, 1983
(3) Journee, J.M.J., “Theory & Algorithms of Two-Dimensional Hydrodynamic Potential Coefficients”. Delft University of Technology, Ship Hydromechanics Laboratory, Delft, The Netherlands, Report No 884, November 1990
(4) Journee, J.M.J., “SEAWAY – DELFT”. User Manual and Theoretical Background of Release 3.00. Delft University of Technology, Delft Ship Hydromechanics Laboratory, Delft, Netherlands, Report No 849, January 1990
(5) Keuning, P.J & Journee, J.M.J., “Calculation Method for the Behaviour of a Cutter Suction Dredger Operating in Irregular Waves”. Proc. Wodcon X, Singapore 1983
(6) Koning, J. description & Miedema, S.A. & Zwartbol, A., “Soil/Cutter Head Interaction Under Wave Conditions”. Proc. WODCON X, Singapore 1983
(7) Koning, J. de, “Selection of Dredging Methods and Equipment”. Proc. WODCON XII, Orlando, Florida, USA, April 1989
(8) Koning, J. de, “Laboratory of Soil Movement and Bulk Transport, Dredging Research Facilities”. Delft University of Tech., October 1992
(9) Miedema, S.A & Koster, A.W.J. & Hurdle, D., “WL-DREDMO”, MS-DOS Version of DREDMO Program (FORTRAN). Delft Hydraulics 1986
(10) Miedema, S.A., “The Calculation of the Cutting Forces when Cutting Water Saturated Sand, Basic Theory and Applications for 3-Dimensional Blade Movements with Periodical Varied Velocities for in Dredging Usual Excavating Elements” (in Dutch). Doctor Thesis, Delft, Netherlands, 1987
(11) Miedema, S.A., “PLOSIM-V4.00”. Graphical Presentation Program. Delft, Netherlands, 1987-now
(12) Miedema, S.A, “On the Cutting Forces in Saturated Sand of Seagoing Cutter Suction Dredger”. Proc. WODCON XII, Orlando, USA, April 1989
(13) Miedema, S.A., “DREDMO – USER – INTERFACE”. User interface for the DREDMO package including manual. Report 92.3.GV.2995, Delft University of Technology, Netherlands, 1992
(14) Miedema, S.A. & Journee, J.M.J. & Schuurmans, S., “On the Motions of a Seagoing Cutter Dredge, a Study in Continuity”. Proc. WODCON XIII, Bombay, India, April 1992
(15) Anonymus, “WAFOR”. Program for the calculation of wave force time series, Delft Hydraulics, Netherlands
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Author: Dr.ir.S.A.Miedema
LIST OF SYMBOLS USED Cummins equations:
A Acceleration vector m/s2 or rad/m2
C Spring coefficient matrix N/m or Nm/radm Frequency independent added mass matrix kg or kgm2
F External forces N or NmK Retardation function N/m or NmM Mass matrix kg, kgm or kgm2
t Time sV Velocity vector m/s or rad/sW Wave forces N or NmX Displacement vector m or radτ Time s∞ Infinite N
Cutting equations:
b Width of blade mc1, c2 Coefficients (no-cavitation) -d1, d2 Coefficients (cavitation) -
e Volume strain %Fh Cutting force in direction of cutting velocity kNFv Cutting force perpendicular to cutting velocity kNg Gravitational constant (9.81) m/s2
hi Initial thickness of layer cut mhb Height of blade mki Initial permeability m/s
kmax Maximum permeability m/skm Average permeability m/sni Initial porosity %
nmax Maximum porosity %vc Cutting velocity m/sz Water depth mα Cutting angle blade radφ Angle of internal friction radδ Soil/Interface friction angle rad
wρ Density water ton/m3
Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
Copyright: Dr.ir. S.A. Miedema
Bibliography Dr.ir. S.A. Miedema 1980-2010
1. Koert, P. & Miedema, S.A., "Report on the field excursion to the USA April 1981" (PDF in Dutch 27.2 MB). Delft University of Technology, 1981, 48 pages.
2. Miedema, S.A., "The flow of dredged slurry in and out hoppers and the settlement process in hoppers" (PDF in Dutch 37 MB). ScO/81/105, Delft University of Technology, 1981, 147 pages.
3. Miedema, S.A., "The soil reaction forces on a crown cutterhead on a swell compensated ladder" (PDF in Dutch 19 MB). LaO/81/97, Delft University of Technology, 1981, 36 pages.
4. Miedema, S.A., "Computer program for the determination of the reaction forces on a cutterhead, resulting from the motions of the cutterhead" (PDF in Dutch 11 MB). Delft Hydraulics, 1981, 82 pages.
5. Miedema, S.A. "The mathematical modeling of the soil reaction forces on a cutterhead and the development of the computer program DREDMO" (PDF in Dutch 25 MB). CO/82/125, Delft University of Technology, 1982, with appendices 600 pages.
6. Miedema, S.A.,"The Interaction between Cutterhead and Soil at Sea" (In Dutch). Proc. Dredging Day November 19th, Delft University of Technology 1982.
7. Miedema, S.A., "A comparison of an underwater centrifugal pump and an ejector pump" (PDF in Dutch 3.2 MB). Delft University of Technology, 1982, 18 pages.
8. Miedema, S.A., "Computer simulation of Dredging Vessels" (In Dutch). De Ingenieur, Dec. 1983. (Kivi/Misset).
9. Koning, J. de, Miedema, S.A., & Zwartbol, A., "Soil/Cutterhead Interaction under Wave Conditions (Adobe Acrobat PDF-File 1 MB)". Proc. WODCON X, Singapore 1983.
10. Miedema, S.A. "Basic design of a swell compensated cutter suction dredge with axial and radial compensation on the cutterhead" (PDF in Dutch 20 MB). CO/82/134, Delft University of Technology, 1983, 64 pages.
11. Miedema, S.A., "Design of a seagoing cutter suction dredge with a swell compensated ladder" (PDF in Dutch 27 MB). IO/83/107, Delft University of Technology, 1983, 51 pages.
12. Miedema, S.A., "Mathematical Modeling of a Seagoing Cutter Suction Dredge" (In Dutch). Published: The Hague, 18-9-1984, KIVI Lectures, Section Under Water Technology.
13. Miedema, S.A., "The Cutting of Densely Compacted Sand under Water (Adobe Acrobat PDF-File 575 kB)". Terra et Aqua No. 28, October 1984 pp. 4-10.
14. Miedema, S.A., "Longitudinal and Transverse Swell Compensation of a Cutter Suction Dredge" (In Dutch). Proc. Dredging Day November 9th 1984, Delft University of Technology 1984.
15. Miedema, S.A., "Compensation of Velocity Variations". Patent application no. 8403418, Hydromeer B.V. Oosterhout, 1984.
16. Miedema, S.A., "Mathematical Modeling of the Cutting of Densely Compacted Sand Under Water". Dredging & Port Construction, July 1985, pp. 22-26.
17. Miedema, S.A., "Derivation of the Differential Equation for Sand Pore Pressures". Dredging & Port Construction, September 1985, pp. 35.
18. Miedema, S.A., "The Application of a Cutting Theory on a Dredging Wheel (Adobe Acrobat 4.0 PDF-File 745 kB)". Proc. WODCON XI, Brighton 1986.
19. Miedema, S.A., "Underwater Soil Cutting: a Study in Continuity". Dredging & Port Construction, June 1986, pp. 47-53.
20. Miedema, S.A., "The cutting of water saturated sand, laboratory research" (In Dutch). Delft University of Technology, 1986, 17 pages.
21. Miedema, S.A., "The forces on a trenching wheel, a feasibility study" (In Dutch). Delft, 1986, 57 pages + software.
22. Miedema, S.A., "The translation and restructuring of the computer program DREDMO from ALGOL to FORTRAN" (In Dutch). Delft Hydraulics, 1986, 150 pages + software.
23. Miedema, S.A., "Calculation of the Cutting Forces when Cutting Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 16 MB)". Basic Theory and Applications for 3-D Blade Movements and Periodically Varying Velocities for, in Dredging Commonly used Excavating Means. Ph.D. Thesis, Delft University of Technology, September 15th 1987.
24. Bakker, A. & Miedema, S.A., "The Specific Energy of the Dredging Process of a Grab Dredge". Delft University of Technology, 1988, 30 pages.
25. Miedema, S.A., "On the Cutting Forces in Saturated Sand of a Seagoing Cutter Suction Dredge (Adobe Acrobat 4.0 PDF-File 1.5 MB)". Proc. WODCON XII, Orlando, Florida, USA, April 1989. This paper was given the IADC Award for the best technical paper on the subject of dredging in 1989.
26. Miedema, S.A., "The development of equipment for the determination of the wear on pick-points" (In Dutch). Delft University of Technology, 1990, 30 pages (90.3.GV.2749, BAGT 462).
27. Miedema, S.A., "Excavating Bulk Materials" (In Dutch). Syllabus PATO course, 1989 & 1991, PATO The Hague, The Netherlands.
28. Miedema, S.A., "On the Cutting Forces in Saturated Sand of a Seagoing Cutter Suction Dredge (Adobe Acrobat 4.0 PDF-File 1.5 MB)". Terra et Aqua No. 41, December 1989, Elseviers Scientific Publishers.
29. Miedema, S.A., "New Developments of Cutting Theories with respect to Dredging, the Cutting of Clay (Adobe Acrobat 4.0 PDF-File 640 kB)". Proc. WODCON XIII, Bombay, India, 1992.
30. Davids, S.W. & Koning, J. de & Miedema, S.A. & Rosenbrand, W.F., "Encapsulation: A New Method for the Disposal of Contaminated Sediment, a Feasibility Study (Adobe Acrobat 4.0 PDF-File 3MB)". Proc. WODCON XIII, Bombay, India, 1992.
31. Miedema, S.A. & Journee, J.M.J. & Schuurmans, S., "On the Motions of a Seagoing Cutter Dredge, a Study in Continuity (Adobe Acrobat 4.0 PDF-File 396 kB)". Proc. WODCON XIII, Bombay, India, 1992.
32. Becker, S. & Miedema, S.A. & Jong, P.S. de & Wittekoek, S., "On the Closing Process of Clamshell Dredges in Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 1 MB)". Proc. WODCON XIII, Bombay, India, 1992. This paper was given the IADC Award for the best technical paper on the subject of dredging in 1992.
33. Becker, S. & Miedema, S.A. & Jong, P.S. de & Wittekoek, S., "The Closing Process of Clamshell Dredges in Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 1 MB)". Terra et Aqua No. 49, September 1992, IADC, The Hague.
34. Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
35. Miedema, S.A., "Dredmo User Interface, Operators Manual". Report: 92.3.GV.2995. Delft University of Technology, 1992, 77 pages.
36. Miedema, S.A., "Inleiding Mechatronica, college WBM202" Delft University of Technology, 1992.
37. Miedema, S.A. & Becker, S., "The Use of Modeling and Simulation in the Dredging Industry, in Particular the Closing Process of Clamshell Dredges", CEDA Dredging Days 1993, Amsterdam, Holland, 1993.
38. Miedema, S.A., "On the Snow-Plough Effect when Cutting Water Saturated Sand with Inclined Straight Blades (Adobe Acrobat 4.0 PDF-File 503 kB)". ASCE Proc. Dredging 94, Orlando, Florida, USA, November 1994. Additional Measurement Graphs. (Adobe Acrobat 4.0 PDF-File 209 kB).
39. Riet, E. van, Matousek, V. & Miedema, S.A., "A Reconstruction of and Sensitivity Analysis on the Wilson Model for Hydraulic Particle Transport (Adobe Acrobat 4.0 PDF-File 50 kB)". Proc. 8th Int. Conf. on Transport and Sedimentation of Solid Particles, 24-26 January 1995, Prague, Czech Republic.
40. Vlasblom, W.J. & Miedema, S.A., "A Theory for Determining Sedimentation and Overflow Losses in Hoppers (Adobe Acrobat 4.0 PDF-File 304 kB)". Proc. WODCON IV, November 1995, Amsterdam, The Netherlands 1995.
41. Miedema, S.A., "Production Estimation Based on Cutting Theories for Cutting Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 423 kB)". Proc. WODCON IV, November 1995, Amsterdam, The Netherlands 1995. Additional Specific Energy and Production Graphs. (Adobe Acrobat 4.0 PDF-File 145 kB).
42. Riet, E.J. van, Matousek, V. & Miedema, S.A., "A Theoretical Description and Numerical Sensitivity Analysis on Wilson's Model for Hydraulic Transport in Pipelines (Adobe Acrobat 4.0 PDF-File 50 kB)". Journal of Hydrology & Hydromechanics, Slovak Ac. of Science, Bratislava, June 1996.
43. Miedema, S.A. & Vlasblom, W.J., "Theory for Hopper Sedimentation (Adobe Acrobat 4.0 PDF-File 304 kB)". 29th Annual Texas A&M Dredging Seminar. New Orleans, June 1996.
44. Miedema, S.A., "Modeling and Simulation of the Dynamic Behavior of a Pump/Pipeline System (Adobe Acrobat 4.0 PDF-File 318 kB)". 17th Annual Meeting & Technical Conference of the Western Dredging Association. New Orleans, June 1996.
45. Miedema, S.A., "Education of Mechanical Engineering, an Integral Vision". Faculty O.C.P., Delft University of Technology, 1997 (in Dutch).
46. Miedema, S.A., "Educational Policy and Implementation 1998-2003 (versions 1998, 1999 and 2000) (Adobe Acrobat 4.0 PDF_File 195 kB)". Faculty O.C.P., Delft University of Technology, 1998, 1999 and 2000 (in Dutch).
47. Keulen, H. van & Miedema, S.A. & Werff, K. van der, "Redesigning the curriculum of the first three years of the mechanical engineering curriculum". Proceedings of the International Seminar on Design in Engineering Education, SEFI-Document no.21, page 122, ISBN 2-87352-024-8, Editors: V. John & K. Lassithiotakis, Odense, 22-24 October 1998.
48. Miedema, S.A. & Klein Woud, H.K.W. & van Bemmel, N.J. & Nijveld, D., "Self Assesment Educational Programme Mechanical Engineering (Adobe Acrobat 4.0 PDF-File 400 kB)". Faculty O.C.P., Delft University of Technology, 1999.
49. Van Dijk, J.A. & Miedema, S.A. & Bout, G., "Curriculum Development Mechanical Engineering". MHO 5/CTU/DUT/Civil Engineering. Cantho University Vietnam, CICAT Delft, April 1999.
50. Miedema, S.A., "Considerations in building and using dredge simulators (Adobe Acrobat 4.0 PDF-File 296 kB)". Texas A&M 31st Annual Dredging Seminar. Louisville Kentucky, May 16-18, 1999.
51. Miedema, S.A., "Considerations on limits of dredging processes (Adobe Acrobat 4.0 PDF-File 523 kB)". 19th Annual Meeting & Technical Conference of the Western Dredging Association. Louisville Kentucky, May 16-18, 1999.
52. Miedema, S.A. & Ruijtenbeek, M.G. v.d., "Quality management in reality", "Kwaliteitszorg in de praktijk". AKO conference on quality management in education. Delft University of Technology, November 3rd 1999.
53. Miedema, S.A., "Curriculum Development Mechanical Engineering (Adobe Acrobat 4.0 PDF-File 4 MB)". MHO 5-6/CTU/DUT. Cantho University Vietnam, CICAT Delft, Mission October 1999.
54. Vlasblom, W.J., Miedema, S.A., Ni, F., "Course Development on Topic 5: Dredging Technology, Dredging Equipment and Dredging Processes". Delft University of Technology and CICAT, Delft July 2000.
55. Miedema, S.A., Vlasblom, W.J., Bian, X., "Course Development on Topic 5: Dredging Technology, Power Drives, Instrumentation and Automation". Delft University of Technology and CICAT, Delft July 2000.
56. Randall, R. & Jong, P. de & Miedema, S.A., "Experience with cutter suction dredge simulator training (Adobe Acrobat 4.0 PDF-File 1.1 MB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
57. Miedema, S.A., "The modelling of the swing winches of a cutter dredge in relation with simulators (Adobe Acrobat 4.0 PDF-File 814 kB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
58. Hofstra, C. & Hemmen, A. van & Miedema, S.A. & Hulsteyn, J. van, "Describing the position of backhoe dredges (Adobe Acrobat 4.0 PDF-File 257 kB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
59. Miedema, S.A., "Automation of a Cutter Dredge, Applied to the Dynamic Behaviour of a Pump/Pipeline System (Adobe Acrobat 4.0 PDF-File 254 kB)". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
60. Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis (Adobe Acrobat 4.0 PDF-File 110 kB)". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
61. Miedema, S.A. & Zhao Yi, "An Analytical Method of Pore Pressure Calculations when Cutting Water Saturated Sand (Adobe Acrobat PDF-File 2.2 MB)". Texas A&M 33nd Annual Dredging Seminar, June 2001, Houston, USA 2001.
62. Miedema, S.A., "A Numerical Method of Calculating the Dynamic Behaviour of Hydraulic Transport (Adobe Acrobat PDF-File 246 kB)". 21st Annual Meeting & Technical Conference of the Western Dredging Association, June 2001, Houston, USA 2001.
63. Zhao Yi, & Miedema, S.A., "Finite Element Calculations To Determine The Pore Pressures When Cutting Water Saturated Sand At Large Cutting Angles (Adobe Acrobat PDF-File 4.8 MB)". CEDA Dredging Day 2001, November 2001, Amsterdam, The Netherlands.
64. Miedema, S.A., "Mission Report Cantho University". MHO5/6, Phase Two, Mission to Vietnam by Dr.ir. S.A. Miedema DUT/OCP Project Supervisor, 27 September-8 October 2001, Delft University/CICAT.
65. (Zhao Yi), & (Miedema, S.A.), "
" (Finite Element Calculations To Determine The Pore Pressures When Cutting Water
Saturated Sand At Large Cutting Angles (Adobe Acrobat PDF-File 4.8 MB))". To be published in 2002.
66. Miedema, S.A., & Riet, E.J. van, & Matousek, V., "Theoretical Description And Numerical Sensitivity Analysis On Wilson Model For Hydraulic Transport Of Solids In Pipelines (Adobe Acrobat PDF-File 147 kB)". WEDA Journal of Dredging Engineering, March 2002.
67. Miedema, S.A., & Ma, Y., "The Cutting of Water Saturated Sand at Large Cutting Angles (Adobe Acrobat PDF-File 3.6 MB)". Proc. Dredging02, May 5-8, Orlando, Florida, USA.
68. Miedema, S.A., & Lu, Z., "The Dynamic Behavior of a Diesel Engine (Adobe Acrobat PDF-File 363 kB)". Proc. WEDA XXII Technical Conference & 34th Texas A&M Dredging Seminar, June 12-15, Denver, Colorado, USA.
69. Miedema, S.A., & He, Y., "The Existance of Kinematic Wedges at Large Cutting Angles (Adobe Acrobat PDF-File 4 MB)". Proc. WEDA XXII Technical Conference & 34th Texas A&M Dredging Seminar, June 12-15, Denver, Colorado, USA.
70. Ma, Y., Vlasblom, W.J., Miedema, S.A., Matousek, V., "Measurement of Density and Velocity in Hydraulic Transport using Tomography". Dredging Days 2002, Dredging without boundaries, Casablanca, Morocco, V64-V73, 22-24 October 2002.
71. Ma, Y., Miedema, S.A., Vlasblom, W.J., "Theoretical Simulation of the Measurements Process of Electrical Impedance Tomography". Asian Simulation Conference/5th International Conference on System Simulation and Scientific Computing, Shanghai, 3-6 November 2002, p. 261-265, ISBN 7-5062-5571-5/TP.75.
72. Thanh, N.Q., & Miedema, S.A., "Automotive Electricity and Electronics". Delft University of Technology and CICAT, Delft December 2002.
73. Miedema, S.A., Willemse, H.R., "Report on MHO5/6 Mission to Vietnam". Delft University of Technology and CICAT, Delft Januari 2003.
74. Ma, Y., Miedema, S.A., Matousek, V., Vlasblom, W.J., "Tomography as a Measurement Method for Density and Velocity Distributions". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
75. Miedema, S.A., Lu, Z., Matousek, V., "Numerical Simulation of a Development of a Density Wave in a Long Slurry Pipeline". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
76. Miedema, S.A., Lu, Z., Matousek, V., "Numerical simulation of the development of density waves in a long pipeline and the dynamic system behavior". Terra et Aqua, No. 93, p. 11-23.
77. Miedema, S.A., Frijters, D., "The Mechanism of Kinematic Wedges at Large Cutting Angles - Velocity and Friction Measurements". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
78. Tri, Nguyen Van, Miedema, S.A., Heijer, J. den, "Machine Manufacturing Technology". Lecture notes, Delft University of Technology, Cicat and Cantho University Vietnam, August 2003.
79. Miedema, S.A., "MHO5/6 Phase Two Mission Report". Report on a mission to Cantho University Vietnam October 2003. Delft University of Technology and CICAT, November 2003.
80. Zwanenburg, M., Holstein, J.D., Miedema, S.A., Vlasblom, W.J., "The Exploitation of Cockle Shells". CEDA Dredging Days 2003, Amsterdam, The Netherlands, November 2003.
81. Zhi, L., Miedema, S.A., Vlasblom, W.J., Verheul, C.H., "Modeling and Simulation of the Dynamic Behaviour of TSHD's Suction Pipe System by using Adams". CHIDA Dredging Days, Shanghai, China, november 2003.
82. Miedema, S.A., "The Existence of Kinematic Wedges at Large Cutting Angles". CHIDA Dredging Days, Shanghai, China, november 2003.
83. Miedema, S.A., Lu, Z., Matousek, V., "Numerical Simulation of the Development of Density Waves in a Long Pipeline and the Dynamic System Behaviour". Terra et Aqua 93, December 2003.
84. Miedema, S.A. & Frijters, D.D.J., "The wedge mechanism for cutting of water saturated sand at large cutting angles". WODCON XVII, September 2004, Hamburg Germany.
85. Verheul, O. & Vercruijsse, P.M. & Miedema, S.A., "The development of a concept for accurate and efficient dredging at great water depths". WODCON XVII, September 2004, Hamburg Germany.
86. Miedema, S.A., "THE CUTTING MECHANISMS OF WATER SATURATED SAND AT SMALL AND LARGE CUTTING ANGLES". International Conference on Coastal Infrastructure Development - Challenges in the 21st Century. HongKong, november 2004.
87. Ir. M. Zwanenburg , Dr. Ir. S.A. Miedema , Ir J.D. Holstein , Prof.ir. W.J.Vlasblom, "REDUCING THE DAMAGE TO THE SEA FLOOR WHEN DREDGING COCKLE SHELLS". WEDAXXIV & TAMU36, Orlando, Florida, USA, July 2004.
88. Verheul, O. & Vercruijsse, P.M. & Miedema, S.A., "A new concept for accurate and efficient dredging in deep water". Ports & Dredging, IHC, 2005, E163.
89. Miedema, S.A., "Scrapped?". Dredging & Port Construction, September 2005. 90. Miedema, S.A. & Vlasblom, W.J., " Bureaustudie Overvloeiverliezen". In opdracht
van Havenbedrijf Rotterdam, September 2005, Confidential. 91. He, J., Miedema, S.A. & Vlasblom, W.J., "FEM Analyses Of Cutting Of Anisotropic
Densely Compacted and Saturated Sand", WEDAXXV & TAMU37, New Orleans, USA, June 2005.
92. Miedema, S.A., "The Cutting of Water Saturated Sand, the FINAL Solution". WEDAXXV & TAMU37, New Orleans, USA, June 2005.
93. Miedema, S.A. & Massie, W., "Selfassesment MSc Offshore Engineering", Delft University of Technology, October 2005.
94. Miedema, S.A., "THE CUTTING OF WATER SATURATED SAND, THE SOLUTION". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
95. Miedema, S.A., "La solution de prélèvement par désagrégation du sable saturé en eau". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
96. Miedema, S.A. & Vlasblom, W.J., "THE CLOSING PROCESS OF CLAMSHELL DREDGES IN WATER-SATURATED SAND". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
97. Miedema, S.A. & Vlasblom, W.J., "Le processus de fermeture des dragues à benne preneuse en sable saturé". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
98. Miedema, S.A. "THE CUTTING OF WATER SATURATED SAND, THE SOLUTION". The 2nd China Dredging Association International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
99. Ma, Y, Ni, F. & Miedema, S.A., "Calculation of the Blade Cutting Force for small Cutting Angles based on MATLAB". The 2nd China Dredging Association
International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
100. ,"" (download). The 2nd China Dredging
Association International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
101. Miedema, S.A. , Kerkvliet, J., Strijbis, D., Jonkman, B., Hatert, M. v/d, "THE DIGGING AND HOLDING CAPACITY OF ANCHORS". WEDA XXVI AND TAMU 38, San Diego, California, June 25-28, 2006.
102. Schols, V., Klaver, Th., Pettitt, M., Ubuan, Chr., Miedema, S.A., Hemmes, K. & Vlasblom, W.J., "A FEASIBILITY STUDY ON THE APPLICATION OF FUEL CELLS IN OIL AND GAS SURFACE PRODUCTION FACILITIES". Proceedings of FUELCELL2006, The 4th International Conference on FUEL CELL SCIENCE, ENGINEERING and TECHNOLOGY, June 19-21, 2006, Irvine, CA.
103. Miedema, S.A., "Polytechnisch Zakboek 51ste druk, Hoofdstuk G: Werktuigbouwkunde", pG1-G88, Reed Business Information, ISBN-10: 90.6228.613.5, ISBN-13: 978.90.6228.613.3. Redactie: Fortuin, J.B., van Herwijnen, F., Leijendeckers, P.H.H., de Roeck, G. & Schwippert, G.A.
104. MA Ya-sheng, NI Fu-sheng, S.A. Miedema, "Mechanical Model of Water Saturated Sand Cutting at Blade Large Cutting Angles", Journal of Hohai University Changzhou, ISSN 1009-1130, CN 32-1591, 2006. 绞刀片大角度切削水饱和沙的力学模型, 马亚生[1] 倪福生[1] S.A.Miedema[2], 《河海大学常州分校学报》-2006年20卷3期 -59-61页
105. Miedema, S.A., Lager, G.H.G., Kerkvliet, J., “An Overview of Drag Embedded Anchor Holding Capacity for Dredging and Offshore Applications”. WODCON, Orlando, USA, 2007.
106. Miedema, S.A., Rhee, C. van, “A SENSITIVITY ANALYSIS ON THE EFFECTS OF DIMENSIONS AND GEOMETRY OF TRAILING SUCTION HOPPER DREDGES”. WODCON ORLANDO, USA, 2007.
107. Miedema, S.A., Bookreview: Useless arithmetic, why environmental scientists can't predict the future, by Orrin H. Pilkey & Linda Pilkey-Jarvis. Terra et Aqua 108, September 2007, IADC, The Hague, Netherlands.
108. Miedema, S.A., Bookreview: The rock manual: The use of rock in hydraulic engineering, by CIRIA, CUR, CETMEF. Terra et Aqua 110, March 2008, IADC, The Hague, Netherlands.
109. Miedema, S.A., "An Analytical Method To Determine Scour". WEDA XXVIII & Texas A&M 39. St. Louis, USA, June 8-11, 2008.
110. Miedema, S.A., "A Sensitivity Analysis Of The Production Of Clamshells". WEDA XXVIII & Texas A&M 39. St. Louis, USA, June 8-11, 2008.
111. Miedema, S.A., "An Analytical Approach To The Sedimentation Process In Trailing Suction Hopper Dredgers". Terra et Aqua 112, September 2008, IADC, The Hague, Netherlands.
112. Hofstra, C.F., & Rhee, C. van, & Miedema, S.A. & Talmon, A.M., "On The Particle Trajectories In Dredge Pump Impellers". 14th International Conference Transport & Sedimentation Of Solid Particles. June 23-27 2008, St. Petersburg, Russia.
113. Miedema, S.A., "A Sensitivity Analysis Of The Production Of Clamshells". WEDA Journal of Dredging Engineering, December 2008.
114. Miedema, S.A., "New Developments Of Cutting Theories With Respect To Dredging, The Cutting Of Clay And Rock". WEDA XXIX & Texas A&M 40. Phoenix Arizona, USA, June 14-17 2009.
115. Miedema, S.A., "A Sensitivity Analysis Of The Scaling Of TSHD's". WEDA XXIX & Texas A&M 40. Phoenix Arizona, USA, June 14-17 2009.
116. Liu, Z., Ni, F., Miedema, S.A., “Optimized design method for TSHD’s swell compensator, basing on modelling and simulation”. International Conference on Industrial Mechatronics and Automation, pp. 48-52. Chengdu, China, May 15-16, 2009.
117. Miedema, S.A., "The effect of the bed rise velocity on the sedimentation process in hopper dredges". Journal of Dredging Engineering, Vol. 10, No. 1 , 10-31, 2009.
118. Miedema, S.A., “New developments of cutting theories with respect to offshore applications, the cutting of sand, clay and rock”. ISOPE 2010, Beijing China, June 2010.
119. Miedema, S.A., “The influence of the strain rate on cutting processes”. ISOPE 2010, Beijing China, June 2010.
120. Ramsdell, R.C., Miedema, S.A., “Hydraulic transport of sand/shell mixtures”. WODCON XIX, Beijing China, September 2010.
121. Abdeli, M., Miedema, S.A., Schott, D., Alvarez Grima, M., “The application of discrete element modeling in dredging”. WODCON XIX, Beijing China, September 2010.
122. Hofstra, C.F., Miedema, S.A., Rhee, C. van, “Particle trajectories near impeller blades in centrifugal pumps. WODCON XIX, Beijing China, September 2010.
123. Miedema, S.A., “Constructing the Shields curve, a new theoretical approach and its applications”. WODCON XIX, Beijing China, September 2010.
124. Miedema, S.A., “The effect of the bed rise velocity on the sedimentation process in hopper dredges”. WODCON XIX, Beijing China, September 2010.