Embed Size (px)
Citation preview
Modeling aquatic invasions and control in a lake system: principles and approaches
Alex PotapovCentre for Mathematical Biology, University of Alberta
and Lodge Lab, University of Notre Dame http://www.math.ualberta.ca/~apotapov/
Joint work with M. Lewis and D. Finnoff
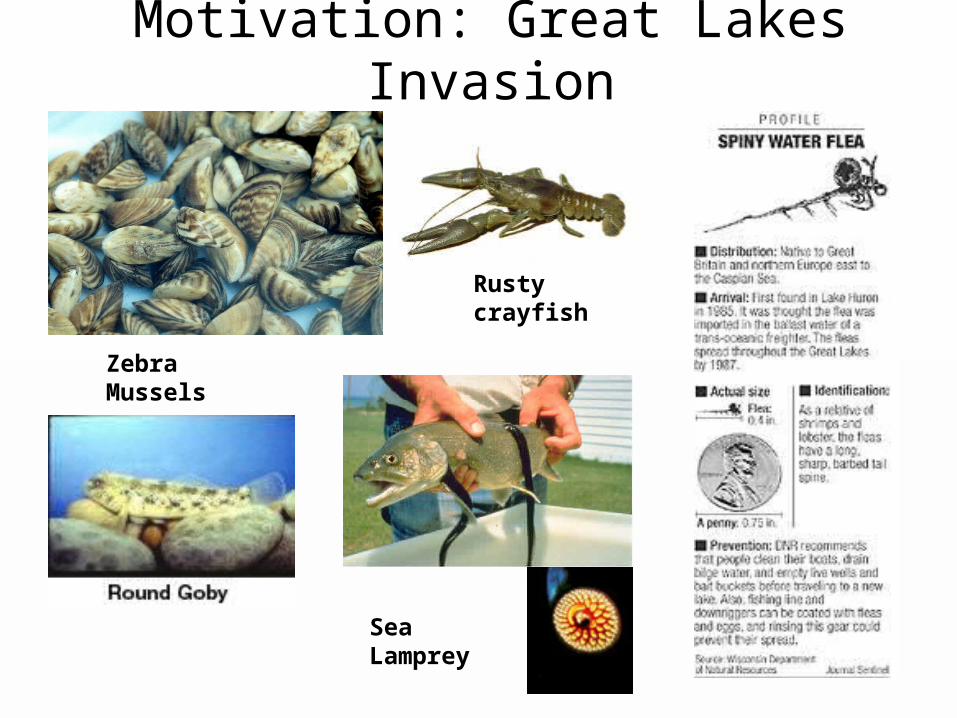
Sea Lamprey
Zebra Mussels
Motivation: Great Lakes Invasion
Rusty crayfish
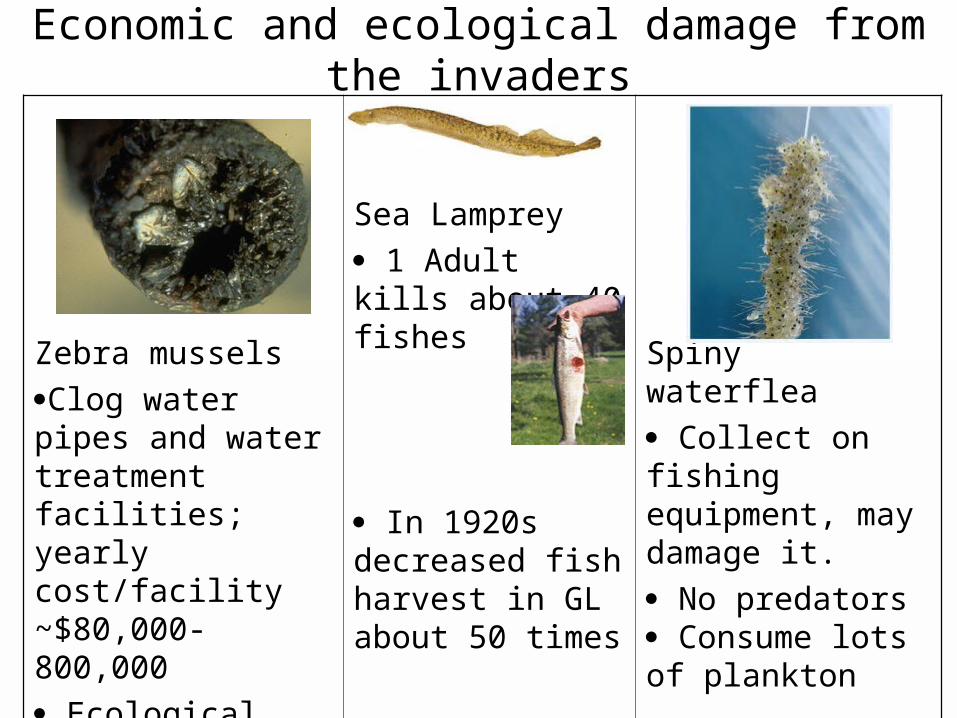
Economic and ecological damage from the invaders
Zebra mussels
Clog water pipes and water treatment facilities; yearly cost/facility ~$80,000-800,000
Ecological damage
Sea Lamprey
1 Adult kills about 40 fishes
In 1920s decreased fish harvest in GL about 50 times
Spiny waterflea
Collect on fishing equipment, may damage it.
No predators Consume lots of plankton
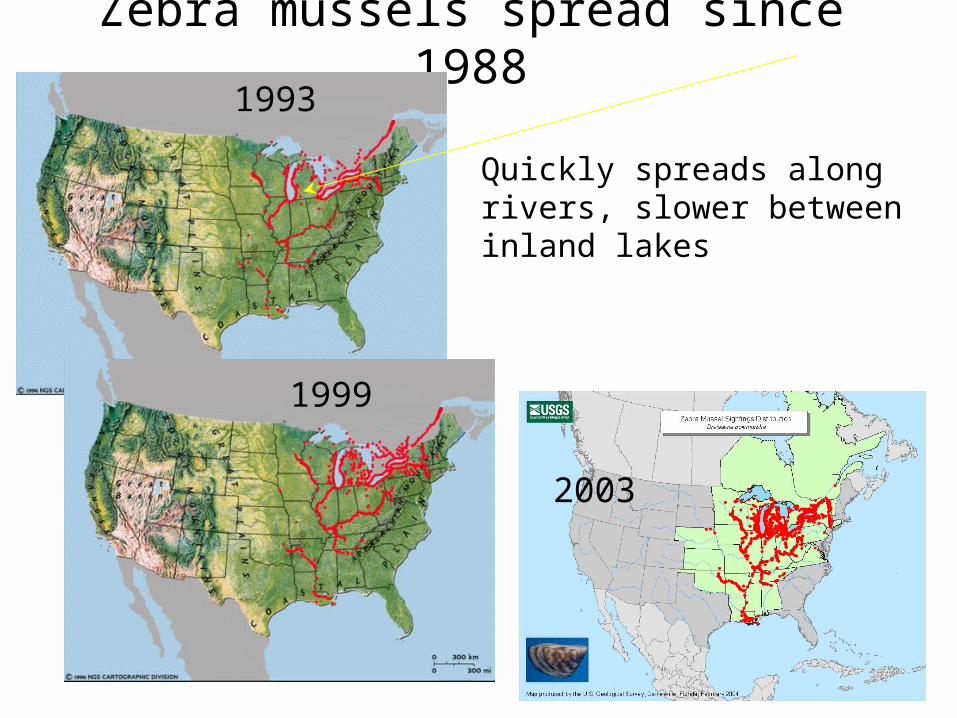
Zebra mussels spread since 1988
Quickly spreads along rivers, slower between inland lakes
1993
1999
2003
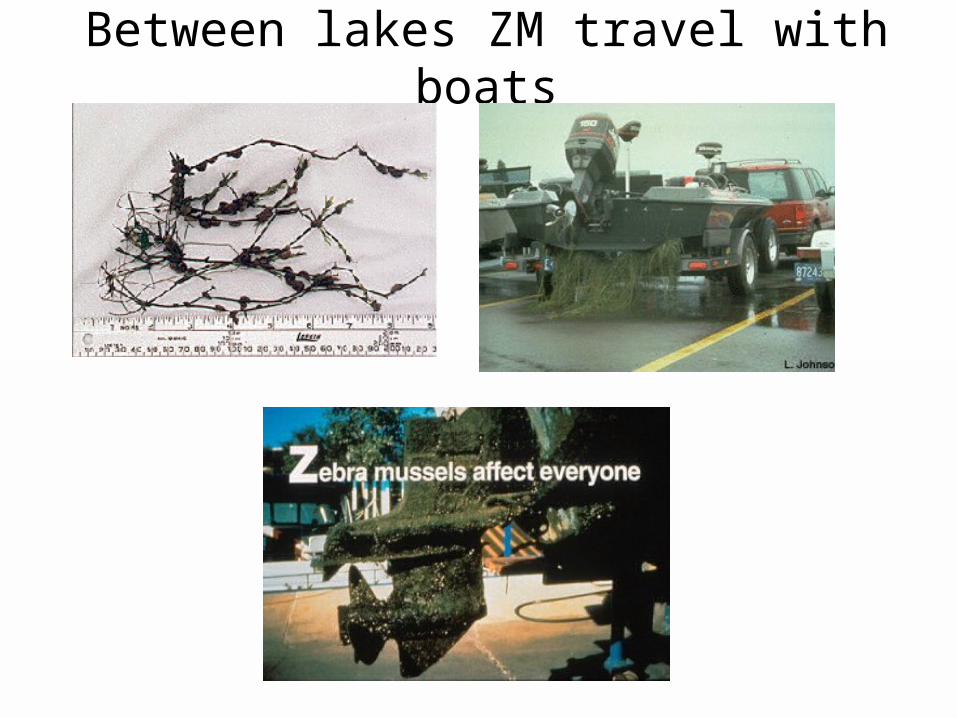
Between lakes ZM travel with boats
Our goal: modeling and understanding optimal management policies in a system
of N lakes Approach: Bioeconomics
Clark C.W. Mathematical Bioeconomics. The optimal management of renewable resources. 1990.Van Kooten G. C. and Bulte E. The Economics of Nature, 2000
Integrates:
•Ecological part (population dynamics and dispersal)
•Control measures
•Economic part (costs and benefits)
•Optimization (analysis techniques)
May be implemented in a number of ways
Possible model types
What details to be included?
What kind of model to be chosen?
Main choices:
Regional scale – Lake scale
Deterministic – Stochastic
Continuous – Discrete
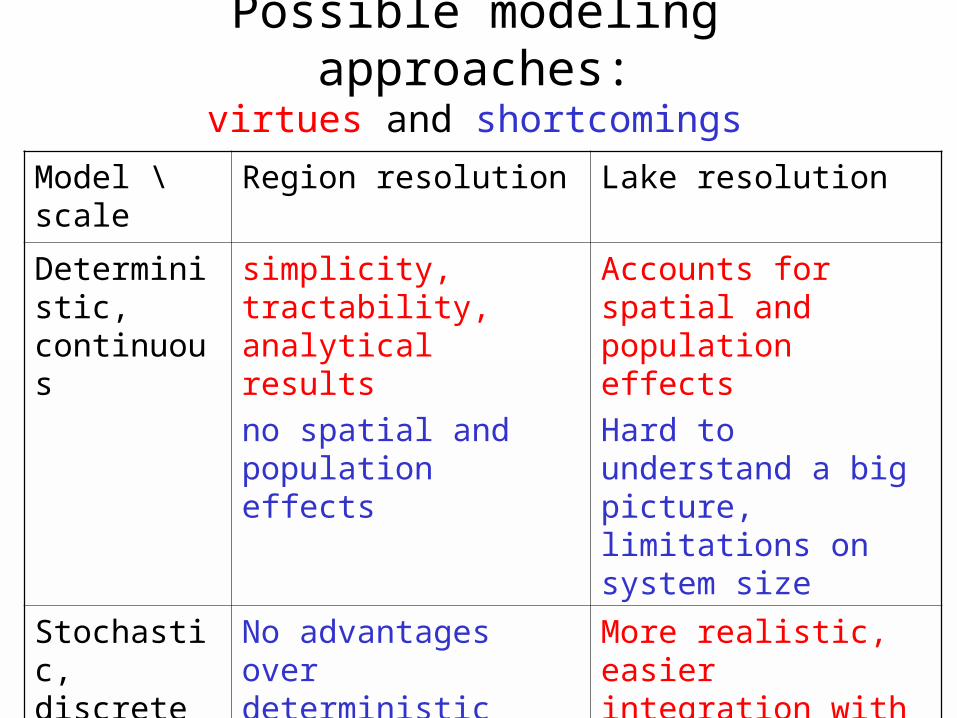
Possible modeling approaches:virtues and shortcomings
Model \ scale Region resolution Lake resolution
Deterministic, continuous
simplicity, tractability, analytical results
no spatial and population effects
Accounts for spatial and population effects
Hard to understand a big picture, limitations on system size
Stochastic, discrete
No advantages over deterministic models
More realistic, easier integration with other ecological concepts
Serious limitations on system size
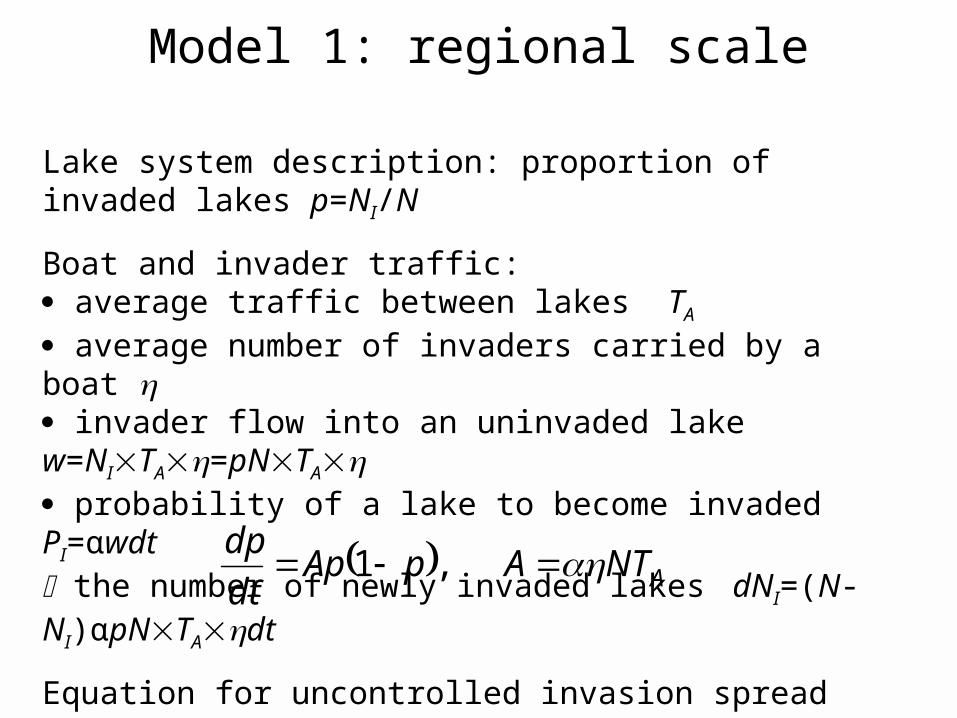
Model 1: regional scale
Lake system description: proportion of invaded lakes p=NI/N
Boat and invader traffic: average traffic between lakes TA average number of invaders carried by a boat invader flow into an uninvaded lake w=NITA=pNTA probability of a lake to become invaded PI=αwdt the number of newly invaded lakes dNI=(N-NI)αpNTAdt
Equation for uncontrolled invasion spread ANTApApdt
dp ,1
Invader controlAn infected boat on average carries invadersProcessing (washing) with cost x reduces to a(x)
xxaxxaxaxa
nxxaxx
nxaxaxx
exp
:
:after
2112
2121
1212
Washing a boat after use at an invaded lake: x(t)
Washing a boat before use at an uninvaded lake: s(t)
ppAedt
dp sx 1
Losses due to invasion at an invaded lake: g ($/year)
Total costs per year per lake
Costs and discounting
sx
Tt
TrT
T
Trt TpVedttEetstxJ ,
)for fitscosts/bene (futurecost Terminal
beforeCost
0costpresent Total
min,
lakes uninvadedat
cost Controllakes invadedat
cost Controllosses
Invasion
1 tstpwtxtpwgtptE sx
Optimal control problem: minimize total present cost with discount rate r and terminal cost VT
How to solve optimal control problems: Pontryagin Maximum Principle
exclude max
:
an)(Hamiltoni of maximum (ii)
ODEs of system (i) problem lVariationa
on t. depend smultiplier Lagrange
,, sconstraint
aldifferentiunder of extremum lconditiona
problem, variationoftion generaliza :
sorxH
ftEH
sxpfdt
dp
J
scheme General
idea Main
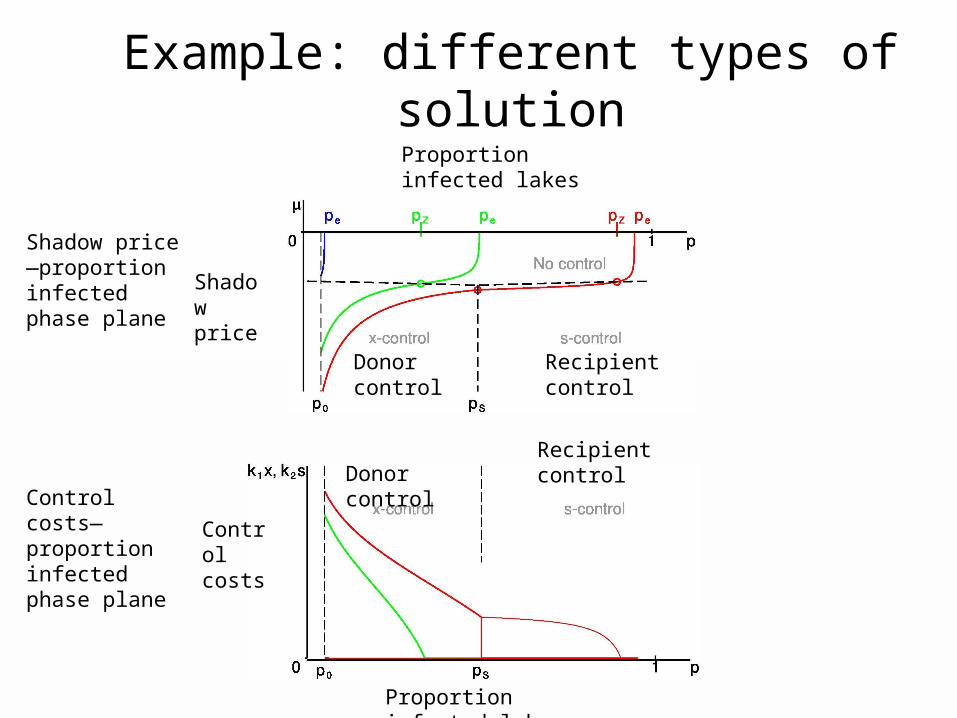
Shadow price
Proportion infected lakes
Proportion infected lakes
Control costs
Donor controlRecipient control
Recipient controlDonor control
Example: different types of solution
Control costs—proportion infected phase plane
Shadow price—proportion infected phase plane
Macroscopic model: main results
•In some cases the optimal control problem can be solved analytically, otherwise can be analyzed by phase plane methods;
•Good understanding of solution properties and role of different parameters;
•Invader flow cannot be reduced to zero, invasion can be slowed down, but not stopped;
•Role of terminal cost: VT=0 leads to no-control strategies for small T.
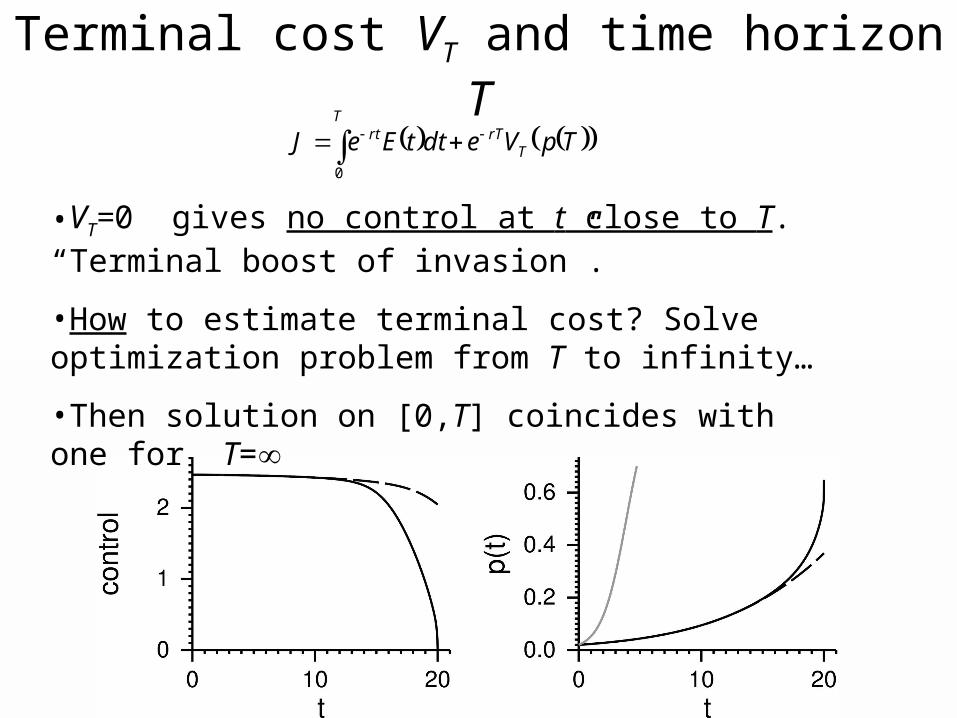
Terminal cost VT and time horizon T
•VT=0 gives no control at t close to T. “Terminal boost of invasion”.
•How to estimate terminal cost? Solve optimization problem from T to infinity…
•Then solution on [0,T] coincides with one for T=
TpVedttEeJ TrT
Trt
0
Infinite-horizon problem
sxrt dttEetstxJ ,
0
min,
Solution tends to a steady state
Two types of problems:
a) Optimal transition to a steady state
b) Optimal steady state. Problem can be essentially simplified, little difference at small r: variation problem → optimization problem
******
**
,,by replace,,
as,
sxpCJsxpp
tstsxtx
Nontrivial steady states require eradication of the invader
Effects absent in macroscopic model
1. Boat traffic between the lakes may strongly deviate from average
2. Optimal control may vary from lake to lake
3. Population dynamics of some invaders has Allee effect: too small population cannot grow. This may allow to stop the invasion
Spatially explicit boat traffic and invader flow
Intensity of boat traffic from lake j to lake i: Tij.
A boat on average can carry invaders.
jix
N
jjij
si euTeW
1
,in
ijjiij dMmT model"gravity "
:practicein ion approximat Typical
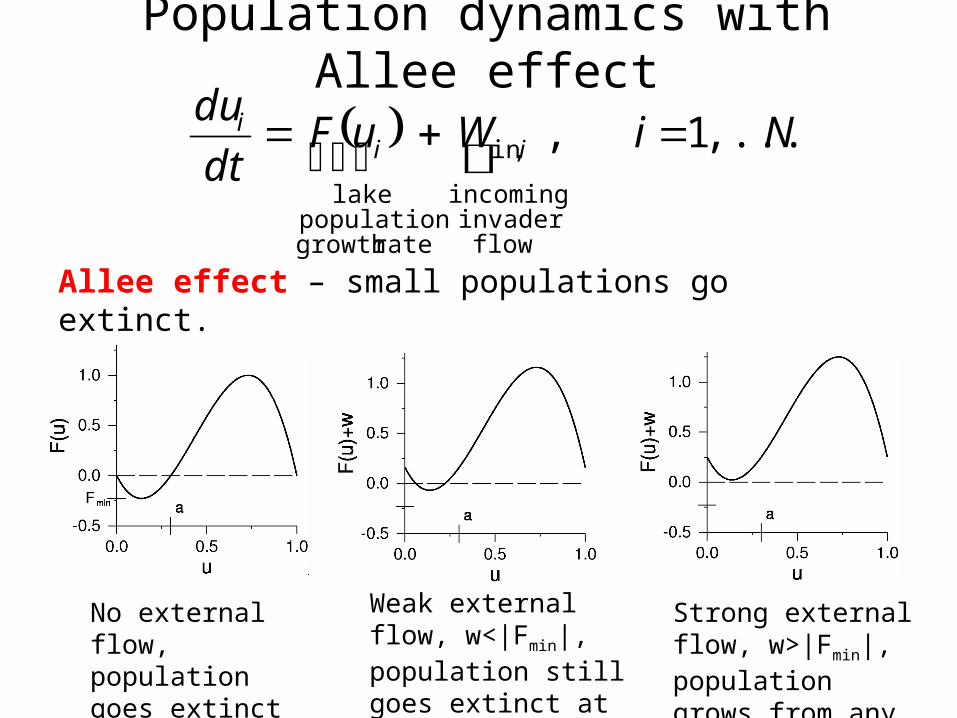
Population dynamics with Allee effect
NiWuFdt
duii
i ,...,1,
flowinvader
incoming
,in
rategrowth population
lake
No external flow, population goes extinct at small u
Weak external flow, w<|Fmin|, population still goes extinct at small u;
Strong external flow, w>|Fmin|, population grows from any u
Allee effect – small populations go extinct.
•Complete optimal control problem is too complicated. Analytically intractable, only numerical study
•Optimal asymptotic steady states: considerable simplification.At steady states there is no progress of the invader: therefore this is a problem of optimal invasion stopping
How to study?
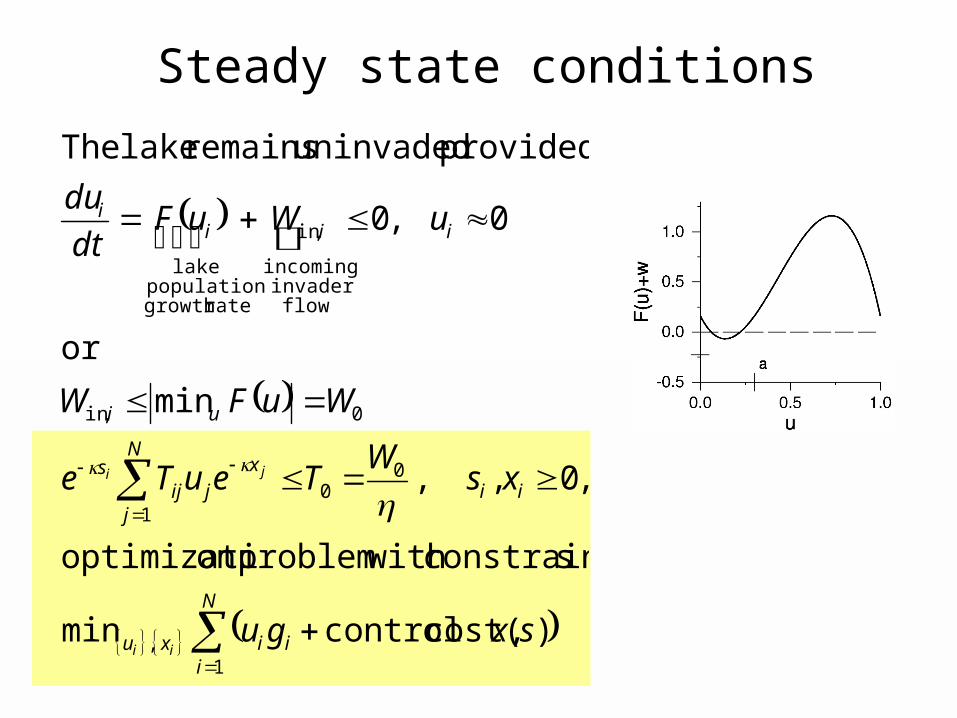
Steady state conditions
N
iiixu
iix
N
jjij
s
ui
iiii
sxgu
xsW
TeuTe
WuFW
uWuFdt
du
ii
ji
1,
00
1
0,in
flowinvader
incoming
,in
rategrowth population
lake
),cost( controlmin
sconstraint with problemon optimizati
,0,,
min
or
0,0
provided uninvaded remains lake The
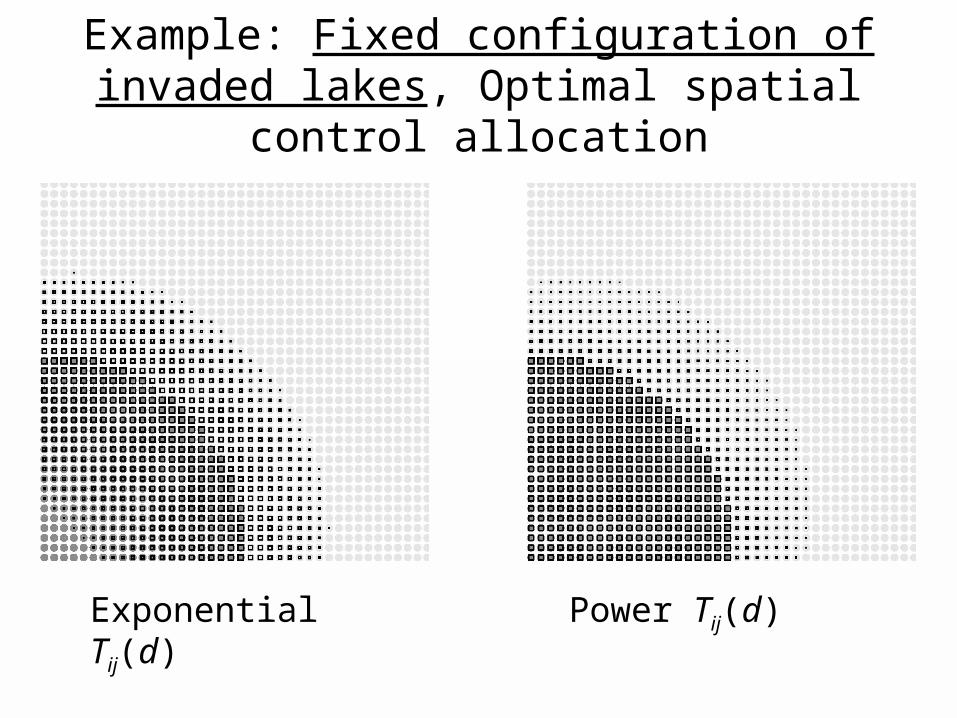
Example: Fixed configuration of invaded lakes, Optimal spatial control allocation
Exponential Tij(d) Power Tij(d)
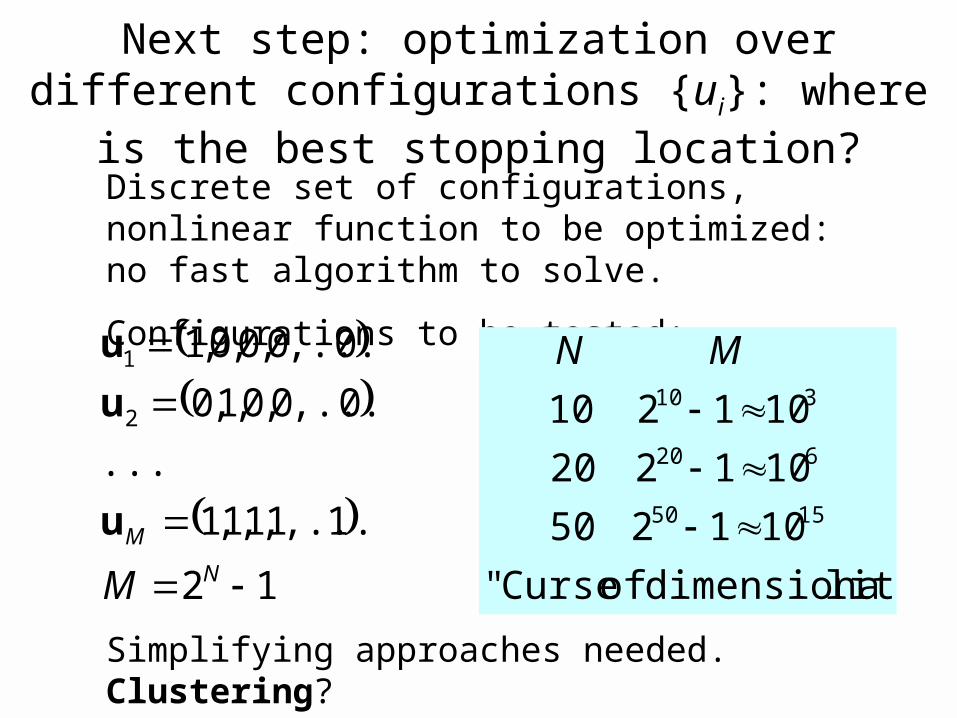
Next step: optimization over different configurations {ui}: where is the best stopping location?
Discrete set of configurations, nonlinear function to be optimized: no fast algorithm to solve.
Configurations to be tested:
12
1,...,1,1,1,1
...
0,...,0,0,1,0
0,...,0,0,0,1
2
1
N
M
M
u
u
u
lity"dimensiona of Curse"
1012
1012
1012
50
20
10
1550
620
310
MN
Simplifying approaches needed. Clustering?
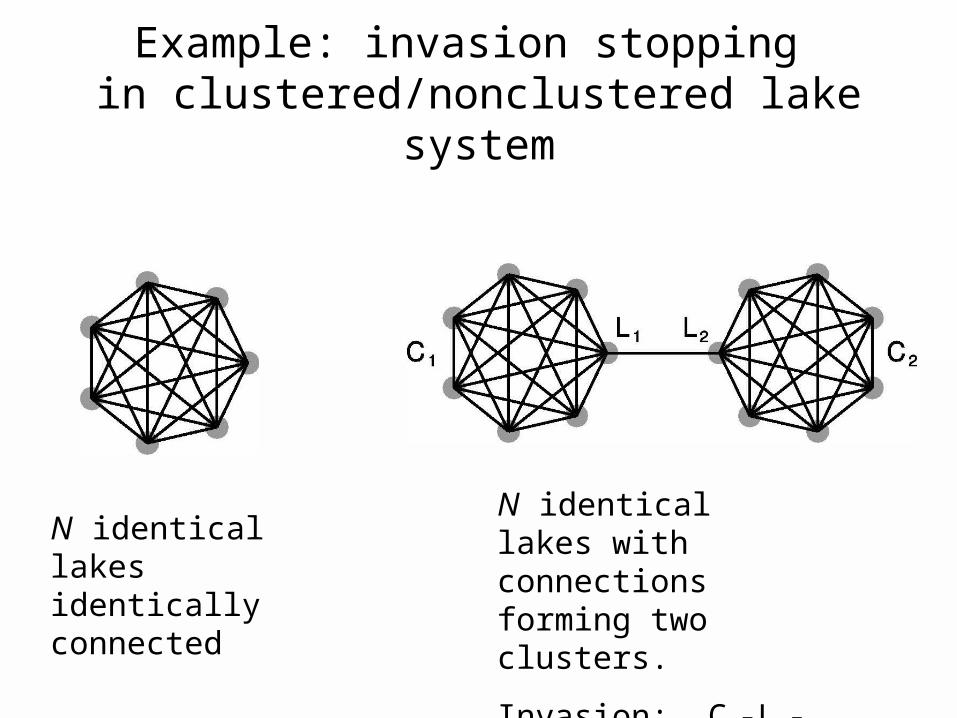
Example: invasion stopping in clustered/nonclustered lake system
N identical lakes identically connected
N identical lakes with connections forming two clusters.
Invasion: C1-L1-L2-C2
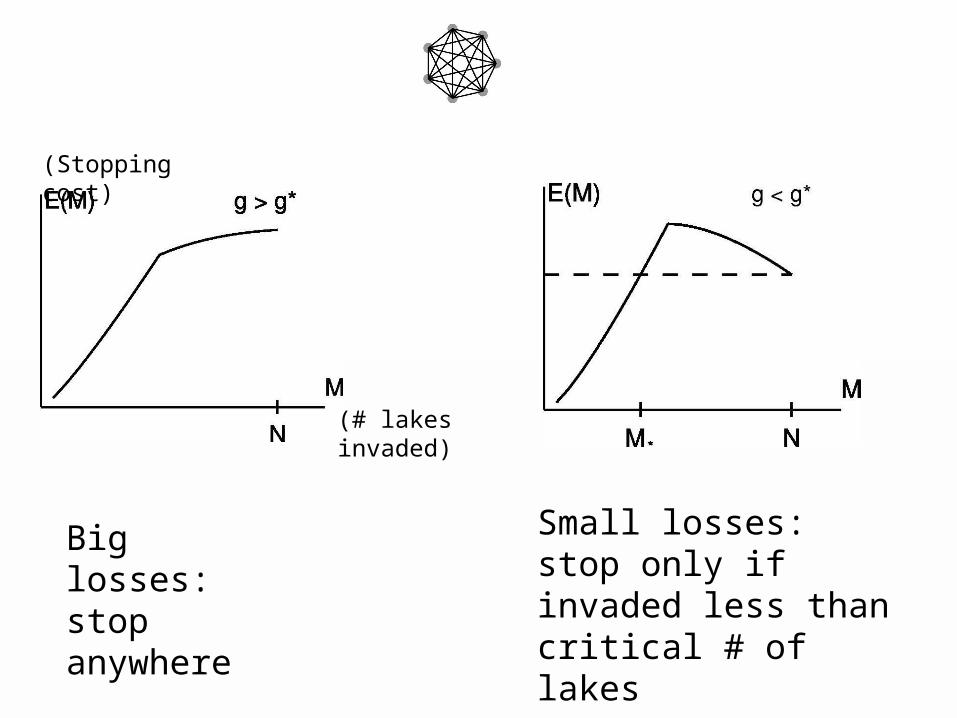
Big losses: stop anywhere
Small losses: stop only if invaded less than critical # of lakes
(Stopping cost)
(# lakes invaded)
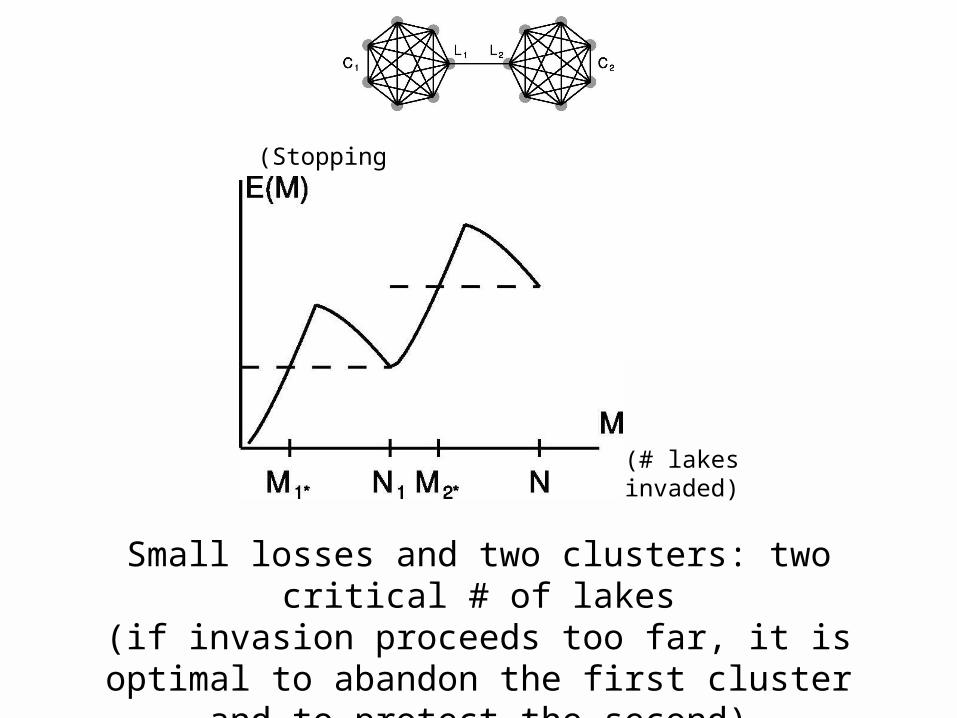
Small losses and two clusters: two critical # of lakes(if invasion proceeds too far, it is optimal to abandon
the first cluster and to protect the second)
(Stopping cost)
(# lakes invaded)
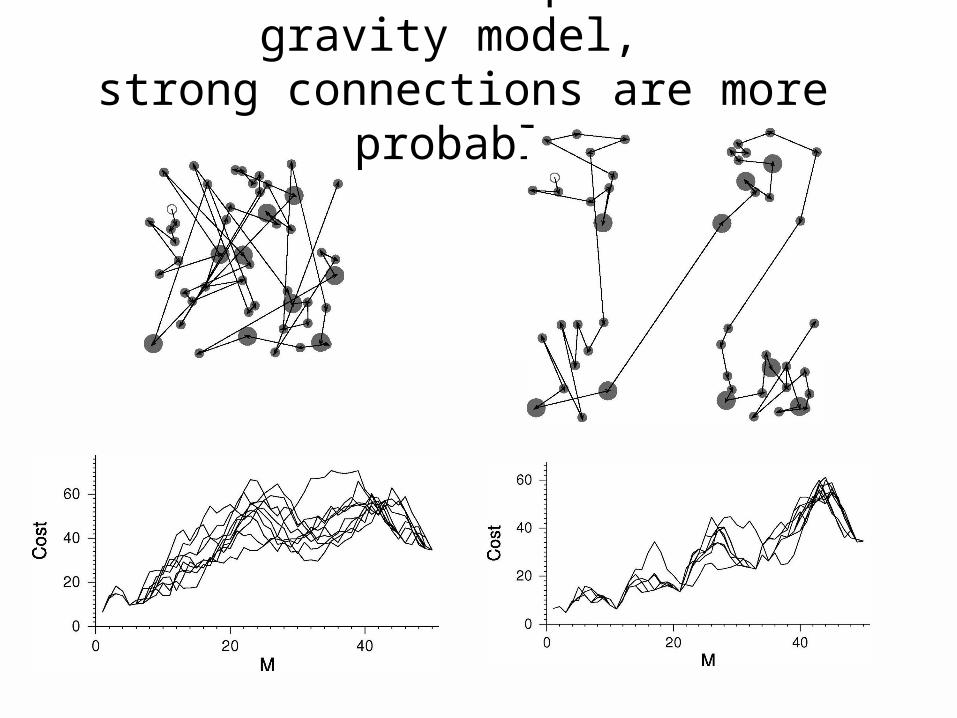
Random invasion paths in a gravity model, strong connections are more probable
Stochastic model: can account for fluctuations in invader flow and
“occasional invasions”The simplest description: each lake can be in invaded/uninvaded state (1 or 0). Description in terms of system state uI, I=1,…,M
Each year the state of each uninvaded lake may change with probability depending on incoming invader flow W: p(0→1)=1–exp(–αW)
This allow to calculate transition probabilities P(uI→uJ). They depend on controls at each lake xi at the state uI.
Controlled Markov chain or Markov decision process
Optimal solution: minimizes total average costs
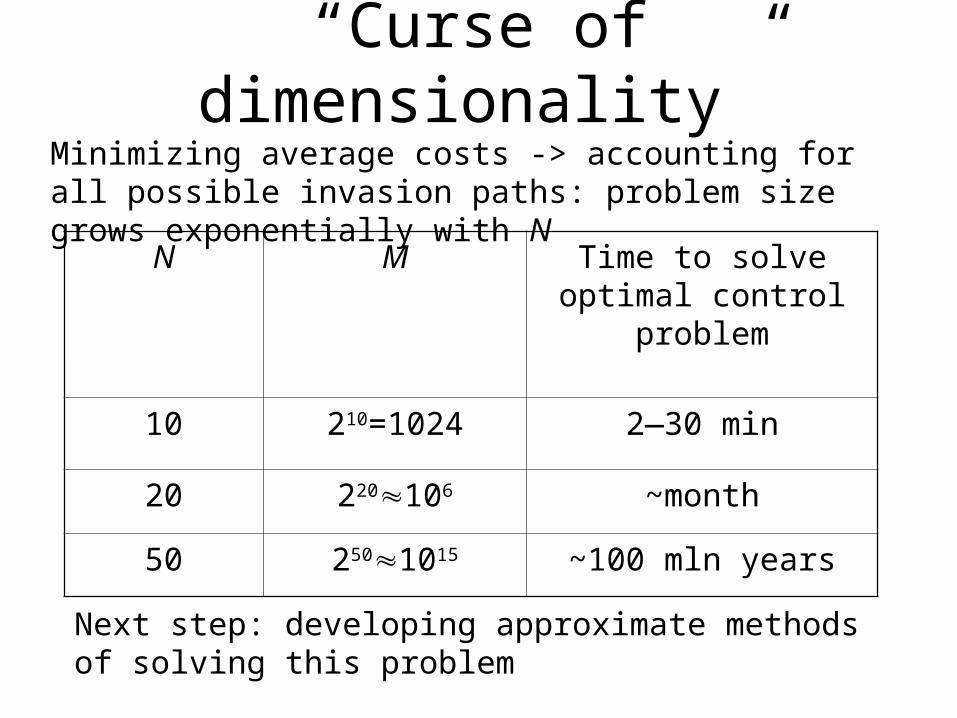
“Curse of dimensionality”
N M Time to solve optimal control problem
10 210=1024 2—30 min
20 220106 ~month
50 2501015 ~100 mln years
Minimizing average costs -> accounting for all possible invasion paths: problem size grows exponentially with N
Next step: developing approximate methods of solving this problem
Conclusions
• Spectrum of models allows us to understand different sides of models•Simple averaged models show global picture and allows us better setting up more detailed problems•Lake-scale models account for local features of population dynamics and transportation•Considering of optimal steady states allows considerable simplification: from optimal control to optimization•Stochastic problems are more realistic but much harder to solve
Acknowledgements ISIS project, (NSF DEB 02-13698) NSERC Collaboration Research Opportunity grant.
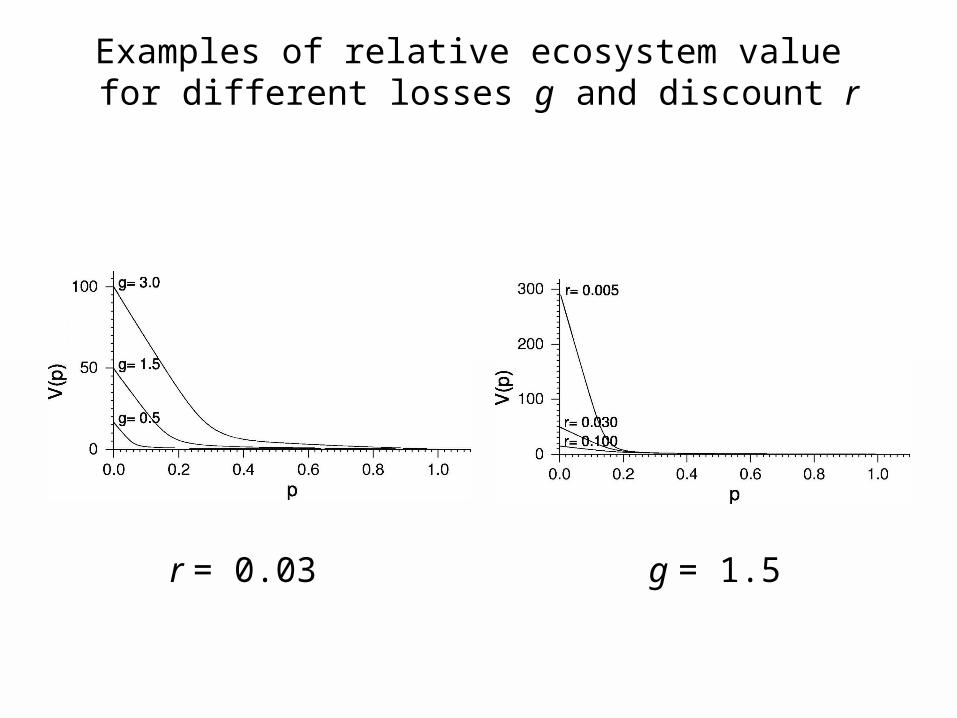
Examples of relative ecosystem value for different losses g and discount r
r = 0.03 g = 1.5