Embed Size (px)
Citation preview

Lappeenranta University of TechnologySchool of Engineering ScienceComputational Engineering and Technical PhysicsTechnical Physics
Vadim Gorshanov
MODELING OF MAGNETIC FIELD DISTRIBUTION ANDOPTIMIZATION OF A MAGNETRON FOR MAGNETRONSPUTTERING TECHNOLOGY
Master’s Thesis
Examiners: Professor Erkki LähderantaMarkku Rajala
Supervisors: Professor Erkki LähderantaMarkku Rajala

ABSTRACT
Lappeenranta University of TechnologySchool of Engineering ScienceComputational Engineering and Technical PhysicsTechnical Physics
Vadim Gorshanov
Modeling of magnetic field distribution and optimization of a magnetron for mag-netron sputtering technology
Master’s Thesis
2019
75 pages, 28 figures, 3 tables, 0 appendices.
Examiners: Professor Erkki LähderantaMarkku Rajala
Keywords: magnetron sputtering, thin films, physical vapor deposition, Monte-Carlo
Current work focuses on applications of computer simulations for design optimizationof a magnetron sputtering source. In order to perform the optimization, a program waswritten that allows to model all stages of magnetron sputtering: calculation of magneticfield depending on the magnetron geometry, simulation of a magnetron discharge, andsimulation of sputtering and deposition of atoms. Use of these simulations allows tooptimize parameters of a magnetron for a more effective target material usage, and choosethe best parameters for deposition of films with given uniformity with the least possibletarget material waste.

PREFACE
Before you lies my thesis which was written to fulfill graduation requirements of a DoubleDegree programme from two universities: Lappeenranta University of Technology (LUT)and Saint-Petersburg Electrotechnical University “LETI”. This work was written duringwinter and spring of 2019 in DCA Instruments Oy in Turku, Finland.
I got engaged in getting a MSc. in August of 2017 in Saint-Petersburg, and along my wayI have met a lot of wonderfull and brilliant people, and I am sure that I would not be ableto succeed without their help and support.
First of all, I would like to thank my supervisor, Markku Rajala, who has always beenready to help during my work. I also want to thank my supervisors from both universities,Professor Lähderanta from LUT and Professor Moshnikov from LETI, who have shownsincere interest in my studies and my findings, and who have always been ready to help; itis also them who have given me all the background neccesary for doing this work. To allmy collegues at DCA Instruments: I would like to thank you for your cooperation as well,and also for the chance to write this thesis with you, it has been a wonderful experience.
Finally, I need to thank my family and friends for their support, and of course my girlfriendJulia.
Turku, May 27, 2019
Vadim Gorshanov

4
CONTENTS
1 INTRODUCTION 91.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2 Objectives and delimitations . . . . . . . . . . . . . . . . . . . . . . . . 91.3 Structure of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 MAGNETRON SPUTTERING TECHNOLOGY 122.1 Thin film deposition technologies. Physical and chemical processes . . . 122.2 Sputter deposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.1 Sputtering phenomena . . . . . . . . . . . . . . . . . . . . . . . 132.2.2 Types of sputter deposition systems . . . . . . . . . . . . . . . . 14
2.3 Magnetron sputtering apparatus. Types of magnetron sputtering systems . 162.3.1 Source of magnetic field . . . . . . . . . . . . . . . . . . . . . . 162.3.2 Cathode geometry . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.2.1 Target-hollow magnetron . . . . . . . . . . . . . . . . 162.3.2.2 Rotatable magnetrons . . . . . . . . . . . . . . . . . . 17
2.4 Magnetic field of a magnetron sputtering system . . . . . . . . . . . . . . 182.4.1 Strength of magnetic field . . . . . . . . . . . . . . . . . . . . . 182.4.2 Shape of magnetic field . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.2.1 Balanced and unbalanced magnetrons . . . . . . . . . . 192.4.2.2 Improving target utilization with shape of magnetic field 21
2.4.3 Magnetron arrays . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 OVERVIEW OF SIMULATION TECHNIQUES FOR MAGNETRON SPUT-TERING 243.1 Calculation of magnetic and electric fields . . . . . . . . . . . . . . . . . 24
3.1.1 Calculation of magnetic field . . . . . . . . . . . . . . . . . . . . 243.1.2 Calculation of electric field . . . . . . . . . . . . . . . . . . . . . 25
3.2 Discharge simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.2.1 Monte-Carlo modelling . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1.1 Basics of Monte-Carlo simulations . . . . . . . . . . . 263.2.1.2 Use of Monte-Carlo modelling for magnetron sputtering 28
3.2.2 Particle-in-Cell Monte-Carlo (Collisions) . . . . . . . . . . . . . 283.2.3 Fluid model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.4 Hybrid model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Sputtering simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.4 Simulation of particle transport . . . . . . . . . . . . . . . . . . . . . . . 293.5 Simulation of deposition . . . . . . . . . . . . . . . . . . . . . . . . . . 29

5
4 EXPERIMENT DESCRIPTION 314.1 Experimental setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.2 Experiment process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3 Measurements description . . . . . . . . . . . . . . . . . . . . . . . . . 314.4 Original magnetron . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5 COMPUTER SIMULATION OF PROCESSES IN MAGNETRON SPUTTER-ING APPARATUS 345.1 Description of the program . . . . . . . . . . . . . . . . . . . . . . . . . 345.2 Calculation of magnetic field . . . . . . . . . . . . . . . . . . . . . . . . 34
5.2.1 Description of the calculation . . . . . . . . . . . . . . . . . . . 345.2.2 Obtained results . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Calculation of electric field . . . . . . . . . . . . . . . . . . . . . . . . . 375.4 Simulation of electrons motion . . . . . . . . . . . . . . . . . . . . . . . 38
5.4.1 Description of the model . . . . . . . . . . . . . . . . . . . . . . 385.4.2 Assumptions made for electrons simulation . . . . . . . . . . . . 395.4.3 Procedure of simulation . . . . . . . . . . . . . . . . . . . . . . 405.4.4 Results of simulation of electrons motion . . . . . . . . . . . . . 44
5.4.4.1 Erosion profile . . . . . . . . . . . . . . . . . . . . . . 445.4.4.2 Depth of erosion . . . . . . . . . . . . . . . . . . . . . 455.4.4.3 Efficiency of confinement . . . . . . . . . . . . . . . . 47
5.5 Simulation of deposition process . . . . . . . . . . . . . . . . . . . . . . 475.5.1 Description of the model . . . . . . . . . . . . . . . . . . . . . . 475.5.2 Sputtering simulation . . . . . . . . . . . . . . . . . . . . . . . . 475.5.3 Motion of sputtered atoms in gas. Calculation of scattering . . . . 495.5.4 Deposition of film . . . . . . . . . . . . . . . . . . . . . . . . . 525.5.5 Results of deposition simulations . . . . . . . . . . . . . . . . . 53
5.5.5.1 Deposition profile . . . . . . . . . . . . . . . . . . . . 535.5.5.2 Optimization of target – substrate positioning. Multi-
substrate simulation . . . . . . . . . . . . . . . . . . . 545.5.5.3 Thickness of deposited film . . . . . . . . . . . . . . . 55
6 DESIGN OF A MAGNETRON 586.1 Cathode geometry considerations . . . . . . . . . . . . . . . . . . . . . . 586.2 Magnetic field considerations . . . . . . . . . . . . . . . . . . . . . . . . 58
6.2.1 Optimal strength of magnetic field . . . . . . . . . . . . . . . . . 586.2.2 Degree of unbalance . . . . . . . . . . . . . . . . . . . . . . . . 58
6.3 Considered options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 596.4 Optimization of parameters of magnetron cathode . . . . . . . . . . . . . 60

6
6.4.1 Optimization of the magnetron . . . . . . . . . . . . . . . . . . . 60
7 DISCUSSION 647.1 Current study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 647.2 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8 CONCLUSION 66
REFERENCES 67

7
LIST OF ABBREVIATIONS2-D Two-dimensional3-D Three-dimensionalCDS Cathode Dark SpaceCFUBMS Closed-field unbalanced magnetron sputteringCOM Center of MassCVD Chemical vapour depositiondc direct-currentDMC Direct Monte-CarloEF Electric fieldFEA (FEM) Finite Elements Analysis (Finite Elements Method)HEE High-energy electronsHiPIMS High-Power Impulsed Magnetron SputteringIC Integrated circuitLCRNG Linear congruental random number generatorMBE Molecular beam epitaxyMC Monte-CarloMF Magnetic fieldMS Magnetron sputteringMT Mersenne twisterPIC-MC(C) Particle-in-Cell Monte-Carlo (Collisions)PVD Physical vapour depositionrf radio frequencyRNG Random number generatorT–S (distance) Target to substrate (distance)

8
MATHEMATICAL NOTATIONx Scalar value xv Vector value v
M Matrix M
vi i-th component of vMi i-th row of MMij Component of M from i-th row and j-th columnx y = xy Multiplication of scalar values x and ya · b Scalar multiplication of vector values a and b
M · a Multiplication of matrix M and vector a, according to rules ofmatrix multiplication
a× b Vector multiplication of a and b
〈a〉 Mean value of a

9
1 INTRODUCTION
1.1 Background
While it has been over half a century that thin films technology has been introduced,new development in this area happen every year. There are a few techniques that allowproduction of thin films: sputtering, molecular beam epitaxy, Langmuir–Blodgett method,various types of chemical deposition, just to name few.
Of all these methods, sputtering is considered one of the most universal, since it iscomparatively easy from technical point of view, and allows deposition of a wide range ofvarious materials without too big changes needed to be made to the equipment (usuallythe changes concern mostly the power source); it is also considered to be environmentallybenign. The traditional sputtering can be enhanced by use of a magnetron, in this case thetechnique is called magnetron sputtering, and even though it was first patented back in1974 [1] (patent filed in 1979), it is an important method of deposition even today [2, 3].
A vast majority of films deposited by sputter deposition is simply metal films, but thismethod is also widely used for acquiring nanostructures [4].
There are two major problems that a researcher faces during his work with a magnetronsputtering apparatus:
1. Inhomogeneous target erosion, which means that only some fraction of sourcematerial is used for the process, which becomes worse for case of sputtering ofprecious metals.
2. Non-uniform deposition profile, which means that some parts of the substrate usuallyhave more material on them than others.
Ideally, both profiles (erosion profile and deposition profile) should be fully uniform, but,unfortunately, it is never possible, however there are some methods that allow to makeboth of these profiles more uniform.
While it is needed to support these developments with experiments, sometimes it may betoo expensive or time-consuming; that is why computer simulations can be used that allowto run a series of virtual experiments and make conclusions based on their results.
1.2 Objectives and delimitations
The major objective of current work is design of the configuration of a magnetic array fora magnetron sputtering source; the magnetic array should be optimal for given geometry.

10
In order to build an optimal magnetron, simulations of the magnetic field and plasma areto be performed; while finite element analysis is an option for calculations of the magneticfield, Monte-Carlo method is suggested for plasma simulations.
Another, additional part of the thesis focuses on modeling deposition process, which allowsto perform the deposition simulation prior to actually depositing a film, in order to findoptimal parameters for making the film uniform enough.
All parts of the simulation are supported with experiments, i.e. the magnetic field wasmeasured and compared to the calculated one, deposition profile is compared to results ofsimulations, as well es erosion profile on the target.
Thus, the list of objectives goes as follows:
• Develop a model and calculate a magnetic field of the original magnetron;
• Measure the magnetic field of original magnetron and compare it to the calculatedone;
• Develop a model and simulate the magnetron discharge;
• Perform experiments in order to check results obtained in previous step;
• Develop a model and simulate deposition process on the substrate;
• Perform experiments and check results of deposition profile simulation;
• Run virtual experiments in order to optimize the magnetron configuration;
• Propose a new configuration of a magnetic array for a magnetron based on givengeometry.
1.3 Structure of the thesis
The basic description of magnetron sputtering apparatus, as well as of physics of the pro-cess, is given in Chapter 2. It describes various parameters affecting sputtering process anddeposited film properties, and introduces concepts of balanced/unbalanced magnetrons andsputtering from multiple targets. Chapter 3 describes applications of computer simulationsto magnetron sputtering processes, major methods are briefly described; Monte-Carlomethods of simulation are described, and choice is made as to what methods are to be usedin following chapters. In Chapter 4 description of used equipment, experiment processand of originally used magnetron can be found, Chapter 5 focuses on performing thesimulations; the models used for every process are described, and results of simulationsare given in comparison with experimental values. Chapter 6 focuses on design of the

11
new magnetron, main considerations are given, and design process is shown. Chapter 7gives discussion of obtained results, as well as possibilities for further research, while inChapter 8 conclusions are given.

12
2 MAGNETRON SPUTTERING TECHNOLOGY
2.1 Thin film deposition technologies. Physical and chemical pro-cesses
All thin film deposition technologies can be divided in two big groups: chemical vapordeposition (CVD) and physical vapor deposition (PVD); there is also a chemical solventdeposition, including sol-gel technology, but it is not discussed in present work.
Some of the deposition techniques are given in Fig. 1.
Thin film deposition techniques
PVD
Sputtering
Diode sputtering
Magnetron sputtering
RF-sputtering
Pulsed sputtering
HiPIMS
Evaporation
Vacuum evaporation
Molecular beam epitaxy
Pulsed laser deposition
CVD
Plasma CVD(reactive sputtering)
Laser CVD
Thermal CVD
Figure 1. Classification of thin film deposition techniques.
As seen from figure, there are two main groups of PVD processes, which are evaporationtechniques and sputtering techniques. Evaporation technology makes use of evaporatedparticles of matter to deposit them on the film; the simplest option in this case is vacuum
deposition, which implies using resistive heating of a source material at low pressure(about 10−4 Pa) and condensing the evaporated atoms on substrates.
Molecular beam epitaxy (MBE) is another method which uses evaporation; it is moresophisticated and reliable process, and it can be used to obtain films with thicknesses ofatomic precision, which can be used for producing heterostructures.
Most CVD processes operate in the range of a few Torr to above atmospheric pressures ofthe reactants; a relatively high temperature (near 1000 C) is required for CVD processes,

13
and various CVD techniques provide an alternative to the thermal activation of the chemicalreactions [3, 5].
2.2 Sputter deposition
2.2.1 Sputtering phenomena
The sputtering is a physical process, which includes atoms being ejected from a solidsurface because of an impact of energetic ions arriving on the surface. Sputtering, unlikeevaporation or CVD, preserves the stoichiometry of the target source. In many cases it isthe preferred deposition technique, especially for metals [6].
The most simple case of sputtering is diode sputtering, in which there are an anode (whichis substrate) and a cathode (which is the target – the source of deposited material). Thechamber is firstly pumped down to levels of about 10−5 Torr, and then an inert gas (likeargon1) is let in the chamber. Because of high voltage applied between anode and cathode,a plasma appears between them, and from the plasma Ar+ ions get accelerated by electricfield (EF) and hit the target; atoms get ejected from the target, and travel through the gasto reach the substrate. A typical system for diode sputter deposition is given in Fig. 2. Atypical pressure of Ar is 10 mTorr to 50 mTorr [4].
Substrate (anode)
+
−
Deposited film
Target (cathode)
ee e
ee
Ar
ArAr
Ar
+Ar
+
Ar
+
Cu
Cu
Argon inflow Vacuum
Figure 2. A typical diode sputtering system.
1Further on, everywhere argon will be used when describing sputtering; theoretically, it can be any otherinert gas.

14
2.2.2 Types of sputter deposition systems
Direct current (dc) sputtering (sputtering in which a constant voltage is applied betweenthe anode and cathode) can only be used to sputter conductive targets. If constant voltageis applied to a system with an insulating target, charge will accumulate on its surface whichwill quickly terminate the process. For non-conductive materials radio-frequency (rf)
sputtering is normally used – in this case, the ions do not have enough time to accumulateon the target. The major drawback of rf-sputtering is that for equivalent power input thedeposition rate is significantly lower than in dc-sputtering.
The deposition rate can be increased with a decrease of Ar pressure, in order to decreasethe pressure and still maintain the discharge, a magnetron sputtering (MS) is introduced; itis sometimes said that introduction of MF is equivalent to increase of gas pressure in thedischarge region [7].
In magnetron sputtering the traditional diode sputtering system is enhanced by a magneticfield that is maintained above the target; because of the magnetic field, electrons, trajectoriesof which get altered by Lorenz force, get trapped close to the target, and are unable toescape the region close to the target. Therefore, electrons stay in the proximity of targetuntil they lose almost all of their energy (become thermalized) to collisions with Ar atoms;so, unlike in diode sputtering, in magnetron sputtering each electron experiences moreionizing collisions, which eventually leads to localization of plasma near the target.
A typical MS system includes a magnet, one pole of which is in the center of the target(under it), and the second pole is outside the target, as shown in Fig. 3. In such case, theelectrons follow helical trajectories around the magnetic field lines.
Because of the fact that in conventional MS systems the magnets have a shape of ring, theelectrons which follow magnetic field lines are also confined in a ring-shaped region nearthe target, and this leads to inhomogeneous erosion of the target; the erosion is also shapedas a ring, and the target utilization is only around 15 % to 30 % [8]. For many decadesone of the main objectives of designing new MS systems has been increasing the targetutilization without losing the electrons’ confinement.
The essential outcome of the magnetic enhancement is a significant decrease of the workingpressure (which is as low as 1 mTorr to 10 mTorr for magnetron sputtering) and voltage(typical values for voltage are 400 V to 600 V).
One of possible uses of a diode sputtering or magnetron sputtering setups includes in-troducing not only inert gas (like Ar), but also a reactive gas, like O2. In this case achemical reaction happens between the sputtered species and gas. This process is calledreactive (magnetron) sputtering; its major advantage is possibility to obtain insulating orsemiconducting coatings (like TiO2) with only dc power supply; however, with dc power

15
Iron yoke
Substrate (anode)
+
−
Deposited film
Target (cathode)
ee e
Ar
ArAr
Ar
+Ar
+
CuCu
Argon inflow Vacuum
Figure 3. A typical magnetron sputtering system.
supply the insulating material can deposit back on the target, which in its turn leads toarcing – an undesired process of increase of current at some point of target which leads tomelting of the target.
To avoid arcing, on one hand, a power supply with arcing prevention can be used, andon the other hand, reactive sputtering can be performed with use of pulsed dc powersupply [4–6, 9, 10].
Another possibility of using a MS system is High-Power Impulse Magnetron Sputtering
(HiPIMS), which essentially uses the same configuration as of conventional MS (like inFig. 3), but implies putting much higher power during much smaller duty cycles (they areabout 50 % in pulsed dc-sputtering, and only about 5 % to 10 % in HiPIMS).
Due to much higher power input in HiPIMS, the ionization of gas is significantly higherduring the time that the power is on; for conventional MS the concentration of ionsis around 1016 m−3–1017 m−3, i.e. the ionization is around 10−3, while for HiPIMS theconcentration of ions is as high as 1019 m−3; this high ionization corresponds to the poweras high as of the order of several kW cm−2 on the target surface, which is too much to berun constantly. This feature leads to sputtered atoms getting ionized in the sheath region,and therefore their flux can easily be directed to the substrate by electric field; on the other

16
hand, the sputtered atoms being ionized leads to some fraction of them getting acceleratedby EF back to the target.
In general, films obtained by HiPIMS tend to be significantly denser than ones obtained byconventional MS [11].
2.3 Magnetron sputtering apparatus. Types of magnetron sputteringsystems
2.3.1 Source of magnetic field
MF can be provided either by electromagnets or by permanent magnets. While theformer allow to control the strength of magnetic field electrically, the latter do not requireadditional dc-power, the MF itself has more complex shape (more suitable for MS), andthe volume and weight of such magnetrons is significantly smaller, which is of specialimportance in case of sputtering from several magnetrons [9].
2.3.2 Cathode geometry
Planar magnetrons are designed with a variety of cathode shapes – rectangular, square,circular, and other; rectangular and circular are the most used: rectangular cathodes finduse in cases when substrates of big area are to be coated, while circular cathodes are widelyused in IC production, since they match the circular geometry of wafers [9]. In furthersections the focus will be made on circular cathodes; however, some of considerationsconcerning MF also apply for rectangular cathodes. Fig. 4 schematically represents thecathode of planar magnetron with circular target.
One of major objectives of MS system design optimization is increase of target utilization,and it can be increased with use of various design solutions, some of which are going to bedescribed in further subsections.
2.3.2.1 Target-hollow magnetron
One of first attempts to improve the utilization of material was the target-hollow magnetron,which is shown in Fig. 5; it significantly broadened the erosion profile by making theMF above target very horizontal. With use of this technology, the target utilization wasincreased up to 60 % [8].

17
e
EB
Erosiontrench
AnodeshieldTarget
Watercooling
Figure 4. A schematic of a planar circular magnetron with a static permanent magnet array. Redline shows a hypothetical trajectory of an electron, while blue lines represent the MF lines.
TargetPole piece
Cathode bodyPermanentmagnets
Watercooling
Figure 5. A hollow cathode magnetron sputtering system.
2.3.2.2 Rotatable magnetrons
Another design solution that allows to improve the target utilization is use of rotatableparts. This option is most used with cylindrical targets, as shown in Fig. 6a. In this casethe magnetron has a similar configuration to a rectangular magnetron, but the target is ahollow cylinder that rotates around the magnetron, so the erosion is uniform on the surfaceof the cylinder. This method is usually applied for high-area substrates [12].

18
Rotation
Plasmaregions
Target
(a)
Target
Rotatablemagnetic array
Plasmaregion
(b)
Figure 6. Using rotatable parts in magnetrons for increase in target utilization: (a) cylindricalrotatable magnetron; (b) planar circular magnetron sputtering source with rotatable magnetic array.
rotatable parts also find some use in planar magnetrons, as shown in Fig. 6b, where themagnetic array moves under the target. Magnetic arrays of more sophisticated shapes (likecardioid, which leads to higher uniformity of erosion) have found use in this configura-tion [13–16]. Obvious disadvantages of such configuration is increase in complexity ofthe cathode; it is more acceptable for cylindrical magnetrons which can be up to severalmeters in length, but it is worse for a circular magnetron, in which it could be important tobe able to place several magnetrons, as will be described further.
2.4 Magnetic field of a magnetron sputtering system
There are two things that need to be considered in MF of a magnetron sputtering setup,namely the MF strength and shape.
2.4.1 Strength of magnetic field
The MF is introduced into the sputtering system in order to confine electrons close to thetarget, so that they are not able to escape the target vicinity, but it has been shown by Goreeand Sheridan [17] that the magnetic field should not be too strong. With the increase ofBmaxr (which is a maximum value of MF component that is tangential to the target) the
average number of ionizations per electron was growing until at some point it reached

19
saturation; the point at which the average number of ionizations is saturated is when forthe majority of electrons all the energy is lost to collisions in plasma.
After that point the increase of MF strength will lead to higher confinement of electronswhich, in its turn, will only make the erosion profile smaller, but will not lead to moreionizations.
Goree and Sheridan found a dimensionless parameter β and showed that the saturationbegins when β ≈ 12 to 15. β is calculated as follows:
β =
√ec
2me
a√UC
Bmaxr , (2.1)
where ec is the elementary charge, me is the mass of electron, a is the radius of maximumerosion, UC is the cathode potential (i.e. discharge voltage), and Bmax
r is the maximum ofradial component of MF.
The typical values of Bmaxr for a 3 inch magnetron are 300 G to 600 G, and from Eq. 2.1 it
can be seen that for bigger radii of the racetrack the MF should be weaker.
2.4.2 Shape of magnetic field
2.4.2.1 Balanced and unbalanced magnetrons
Concept of MF of a magnetron being either balanced or unbalanced was first described byWindow and Savvides [18].
In an unbalanced MS system (Fig. 7a or 7c), either the central magnet or the outer magnetsis stronger than other, so there are magnetic lines that extend into outer space. Electronsin a magnetron follow MF lines, so when there are these unclosed lines, electrons whichfollow them get lost from target vicinity: in case when the central magnet is stronger(Fig. 7a), electrons get lost from plasma radially, while in case when the outer magnets arestronger (Fig. 7c), there are electrons that end up close to the substrate. It leads to ionizationevents close to the substrate, so there is some ion bombardment of the substrate. Windowand Savvides found that the ion flux on the substrate for a Type II (Fig. 7c) magnetron canbe as high as the flux of sputtered atoms (or even up to 10 times higher [19]), while for aType I (Fig. 7a) magnetron it is only 0.025 % of the atom flux. Usually, Type I unbalancedmagnetrons are not of interest, because the electrons confinement is weaker, and thereis no improvement as compared to the balanced (Fig. 7b) design, so the choice is madebetween a balanced design and an unbalanced design of Type II.
While for some fragile materials this ion bombardment produced by unbalanced mag-netrons is undesirable, for many cases of sputtering conventional materials, the ion flux

20
Type I
(a)
Intermediate
(b)
Type II
(c)
Figure 7. Three types of magnetrons as described by Window and Savvides [18]: (a) unbal-anced magnetron of Type I, in which the central magnet dominates; (b) balanced magnetrons;(c) unbalanced magnetron of Type II, in which the outer magnets dominate.
provides additional heating of the substrate, which assists the deposition process [19]. Thisincludes sputtering of metallic coatings, or sputtering processes in which some desiredchemical reaction can be initiated by ion flux assistance [18].
As a measure of a magnetron imbalance, two different values can be used:
g-coefficient, as proposed by Gencoa [20]. The coefficient is calculated as g =ZBz=0
RT,
where ZBz=0 is the distance from target at which the vertical component of MF isequal to zero, and RT is target radius. This is shown in Fig. 8. After the calculationthe magnetron can be assessed according to Table 1;
kImb, introduced in this work. The coefficient is calculated as kImb = VNVS
, where VN isthe volume of magnets facing N-side up, and VS is the volume of magnets facingS-side up. kImb can be used in order to compare magnetrons with similar geometryto quickly evaluate how the g-coefficient will change.
Table 1. Types of balanced and unbalanced magnetrons as classified by Gencoa [20].
Number Group Description g =ZBz=0
RT
I Extremely balanced g ≥ 2.00
II Very balanced 1.75 ≤ g < 2.00
III Medium balanced 1.50 ≤ g < 1.75
IV Unbalanced 1.25 ≤ g < 1.5
V Very unbalanced 1.00 ≤ g < 1.25
VI Extremely unbalanced g < 1.00

21
.
Figure 8. Calculation of Gencoa’s g-coefficient [20]
I-V-curves of magnetron plasma with different types of magnetrons have been studies byGolosov [21]; some results of his experiments are given in Fig 9. It was found that themaximum current flows in the system in the case of a balanced configuration (Fig 7b),which is due to the fact that the confinement of electrons is most effective in this case.For both Type I and Type II magnetrons the current was lower for the same voltage,independent on the type of the unbalanced magnetron; however, for Type I magnetrons theplasma became unstable and extinguished in case of too high degree of unbalance.
Higher current flowing in magnetron discharge is of interest, because it leads to higherdeposition rates and more stable plasma, so a compromise is sometimes to be made betweendegree of unbalance and the current.
2.4.2.2 Improving target utilization with shape of magnetic field
It has been shown [22], that in order to improve target utilization the MF lines need to behorizontal near the target surface, i.e. the vertical component (Bz) needs to be close to zero;in this case the ring-shaped region in which electrons get confined is wider, and thereforethe erosion profile is wider. Wider erosion profile not only increases the target utilization,but also indirectly increases deposition rate and film uniformity, since the area from whichatoms are sputtered is bigger. This concept of making the MF more horizontal finds itsapplication in the previously described (see subsection 2.3.2.1) target-hollow magnetrons,and in rectangular magnetron described in [22]. However such approaches can hardly beapplied to a planar circular target (though such concepts have been described [23, 24]),mostly due to the fact that it would increase the cathode diameter significantly.

22
UC
I
Balanced magnetron
Unbalanced magnetron 1
Unbalanced magnetron 2
Figure 9. I-V-curves of differently balanced magnetrons (based on [21]). It is important that in thiscase “Unbalanced magnetron 1” is not necessary of Type I from Fig. 7, but it is less unbalancedthan Unbalanced magnetron 2, while it does not matter whether they are of Type I or of Type II.
Another option was described by Chen et al. [25] and included placing additional rings ofouter magnets above the plane of the target and “compressing” the magnetic field; however,this options also leads to increase in size of the cathode, not only in diameter, but also inheight.
In options proposed in [23, 25] another important concern is making sure that the magnetsdo not get sputtered as well as the target, because it would lead to contamination of thefilm, which is actually reported in [23].
Other possibilities for improving target utilization is inserting additional magnets under thetarget, which can be placed horizontally [26] or vertically [27]; this can be done withoutdamage to the dimensions of the magnetron sputtering cathode, and does not lead topossible contamination of the resulting thin film.
2.4.3 Magnetron arrays
In some cases, several magnetrons are to be used in single process. In this case thereare two options regarding the MF confuguration – either the magnetic arrays of differentmagnetrons are identical (in this case the whole configuration is called mirrored) – as inFig. 10a, or they are “reversed”, i.e. with magnets turned upside down (this configurationis called closed) – as in Fig. 10b [28, 29].

23
Plasma Plasma
Substrate
(a)
Substrate
Plasma
(b).
Figure 10. (a) Mirrored magnetic configuration; (b) Closed-field unbalanced magnetic configura-tion (CFUBMS)
In case of mirrored configuration there is little difference from a single magnetron sput-tering system, but with obvious increase in deposition rate; while in case of a closedconfiguration, and especially so-called closed-field unbalanced configuration (closed-fieldunbalanced magnetrons sputtering – CFUBMS), there is a significant increase in the ionbombardment of the substrate, however the current is lower at the similar voltage due toloss of some electrons to the plasma. Some of lost electrons do not get lost completely, asfor single unbalanced magnetron, but get “picked up” by the second magnetron [30, 31].

24
3 OVERVIEW OF SIMULATION TECHNIQUES FORMAGNETRON SPUTTERING
Various simulation techniques have been applied to MS processes. On the one hand, thephysical basics of the processes are known well enough [10] to propose simulation models,but on the other hand, the numbers of dependent and independent variables is too big topropose a reasonable and universal enough analytical model (although there is at least one,proposed by Buyle et al. [32, 33]). This leads to the fact that in most cases, when oneneeds to investigate influence of some parameters on the final result of deposition (or, forexample, on the erosion profile on the target), simulation is used.
A complete simulation process would look similar to shown in Fig. 11, but usually differentstages of simulation are performed in separate programs.
System configuration:Location of magnets,geometry of target,geometry of chamber
Process parameters:Voltage, gas, target material,gas pressure,geometry/location ofsubstrate
Magnetron sputteringsimulation
Film properties:Thickness, uniformity,surface parameters,cost per m2, conductance,etc.
Calculation ofmagnetic andelectric fields
Simulation ofmagnetrondischarge(electrons andions motion)
Simulation ofsputtering
Simulation ofparticletransport
Simulation ofdepositionprocesses
.
Figure 11. A complete magnetron sputtering simulation process (based on [34])
This work covers all the steps presented in Fig. 11, but some of them in their simplifiedform (like ions motion, sputtering, and deposition processes). The steps that are presentedin the figure are going to be briefly described in following subsections.
3.1 Calculation of magnetic and electric fields
3.1.1 Calculation of magnetic field
The magnetic field normally serves as input data for all other calculations, since it is almostnot influenced by the plasma.

25
There are a few packages that perform calculations of MF based on the arrangement ofpermanent magnets, like commercially available COMSOL [35] or freeware FEMM [36],but there are a lot of other ones [34]; another option is calculating the MF with use ofavailable analytical models [37].
3.1.2 Calculation of electric field
Shape of EF is seriously influenced by the presence of the charged particles of plasma. Atypical EF of a discharge is shown in Fig. 12.
Cathode Anode
Plasma
Vp – Plasma potential
Cathodedark space
(CDS)
Anodedark space
Appliedvoltage
.
Figure 12. A typical shape of electric field in a sputter deposition system (based on [38])
As seen from Fig. 12, a potential drop almost equal to the voltage between anode andcathode appears between the cathode and the plasma itself. The plasma is consideredquasi-neutral (i.e., ni = ne, where ni is density of ions, and ne is density of electrons), andthe region between cathode and plasma is a space-charge region which occurs because ofmobility difference between electrons and ions. It is called cathode dark space (CDS), orcathode sheath [38, 39].
There are three main approaches for estimation of EF distribution in a magnetron discharge:calculating the EF in advance (e.g. by Child’s law [40, 41]), calculating the EF simul-taneously with the discharge simulation in self-consistent manner (it will be discussedfurther among options of discharge simulation – see 3.2.2), or directly measuring the EFdistribution with a Langmuir probe [42], as, for example, in [43].

26
3.2 Discharge simulation
There are a few techniques that can be used for simulation of a magnetron discharge, butall these can be divided into self-consistent and not self-consistent:
Self-consistent simulation does not require any input data except the magnetic fieldconfiguration, and motion of charged particles and EF formation are modelledsimultaneously, using on Poisson law.
Not self-consistent simulation does not simulate all processes simultaneously, and nor-mally just models some part of the whole sputtering process (i.e. electron movementor ions bombarding) with some assumptions made about other processes.
In further sections some more detailed description of different techniques, as well as somebasics of Monte-Carlo method, are given.
3.2.1 Monte-Carlo modelling
Monte-Carlo (MC) method is a technique that implies simulation of various processes(which can be physical, social, financial, etc.) with essential use of random numbers.
Another feature of MC modelling is use of a great number of “samples”, which is becausethe error decreases as ε ∝ 1√
N, where N is number of samples [44].
Due to the fact that in MS there are great numbers of particles (electrons, atoms and ions)MC modelling has long since been applied to investigations of these phenomena [45],and since some MC techniques are going to be used in this work, basic concepts of MCmodelling will be described in following subsection.
3.2.1.1 Basics of Monte-Carlo simulations
All modern computers have built-in ability to generate random numbers – a random numbergenerator (RNG); those are not really random numbers but pseudorandom numbers, i.e.they are calculated based on some algorithm. In many cases a linear congruental randomnumber generator (LCRNG) is used as a default one [44]. This generator is fairly good,but Mersenne Twister (MT) [46] is often considered a better option for MC modelling –it has a very big period and is very fast [47]. MATLAB versions R2018a, R2018b andR2019a, which were used in present work, use MT as a default RNG [48]. In furthersections term “random numbers” will be used to refer pseudorandom numbers obtained byMT with default MATLAB settings by using command rand, unless otherwise stated.

27
As a rule, built-in RNGs generate numbers so thatR ∈ [0, 1]; and if one needs a distributionother than uniform, or in some other range, then certain transformations are to be made.
• The easiest case is a uniform distribution in other range, in this case
R′ = (b− a)R + a (3.1)
where R ∈ [0, 1], and R′ ∈ [a, b];
• For some common distributions (e.g. Gauss or exponential distributions) the trans-formations can be found in literature (e.g. in [44]);
• For arbitrary distribution function p(x), which satisfies following relations:∫p(x)dx = 1, p(x) ≥ 0, (3.2)
a fundamental transformation law of probabilities can be applied, which goes asfollows: if there is a random variable x from a known distribution p1(x) (in our caseit is a uniform distribution), and a function y = y(x), the probability distribution ofp2(y) is determined through
p1(x)|dx| = p2(y)|dy| ⇒ p2(y) = p1(x)
∣∣∣∣dxdy
∣∣∣∣ . (3.3)
However, in most cases the p2(y) distribution is known, but a transformation lawy = y(x) is what needs to be found; it can be found by integrating Eq. 3.3:
x∫a1
p1(x′)dx′ =
y∫a2
p2(y′)dy′, (3.4)
where a1 and a2 are the smallest values where p1(x) and, respectively, p2(y) aredefined (−∞ is often used). Considering that p1(x) = 1 and x ∈ [0, 1], the left handside becomes equal to x, and therefore,
x =
y∫a2
p(y′)dy′, (3.5)
Where x is a uniformly distributed random number which is R ∈ [0, 1]. With use ofthis equation random numbers belonging to any distribution can be obtained [47].

28
3.2.1.2 Use of Monte-Carlo modelling for magnetron sputtering
MC modelling can be applied to simulation of two processes in magnetron discharge:motion of electrons and motion of ions.
While these techniques (which are sometimes called direct Monte-Carlo, or DMC mod-elling) are not self-consistent, they have a major advantage of being fast and easy toimplement, and still give fairly good results; DMC modelling that is going to be used inpresent work.
For using DMC some assumptions are to be made concerning the electric field distribution,as has been said in 3.1.2.
3.2.2 Particle-in-Cell Monte-Carlo (Collisions)
Particle-in-Cell Monte-Carlo (PIC-MC, or sometimes Particle-in-cell Monte-Carlo Colli-sions – PIC-MCC) is a technique similar to DMC, but which does not deal with individualparticles but rather with so-called super-particles, each of which represents a whole packageof individual particles.
PIC-MC method is truly self-consistent, since it solves Poisson equation in order to findthe actual distribution of electric field based on the charged particles densities.
The major disadvantage of this method is its high computational cost, it has been reportedto take up to several weeks to calculate the discharge parameters, even though a few ofthese models are only 1D or 2D [34, 49].
3.2.3 Fluid model
Fluid models use continuity equations of the particle fluxes in a magnetron discharge; themajor disadvantages of these models are following: for pressures of several mTorr theassumptions made for these models are not necessarily correct, and the diffusion equationswork correctly only for low enough values of MF [34, 49].
3.2.4 Hybrid model
In practice, a hybrid model means a model that comprises some simulation made by MCmethod and some calculations according to fluid model.
The models that have been described [50] use MC modelling for high-energy electrons,and use the data obtained by MC modelling as input data for a fluid model as following:

29
electrons collide with Ar, and the sites of collisions are then treated in fluid model assources of ion fluxes.
While these models are self-consistent and take less time to compute than PIC-MC, theyinherit disadvantages of fluid models, i.e. they give wrong results for high values of MFmagnitude and for too low pressures [34].
3.3 Sputtering simulation
The theory of sputtering was developed by Sigmund and Thompson [51–54], it yieldsanalytical expressions for energy and angular distributions of the sputtered atoms. There isalso an empirical model by Yamamura et al. for calculation of of sputtering yields [55, 56](sputtering yield Y (E) is number of atoms sputtered from target by incident atom withenergy E), it is possible to use these models for simulations of sputtering.
Another options would be using a widely spread [34] TRIM code [57], or some otherprogram [58] from which the above-mentioned data can be obtained by a MC-simulationof collisions process inside solid; use of SRIM and TRIM allows to find both sputteringyield, and energy and angular distributions of sputtered atoms.
3.4 Simulation of particle transport
Simulations of particle transport usually include MC modelling transport of energetic andthermalized atoms (i.e. diffusion) and give the final locations of sputtered atoms (on thesubstrate or on the chamber walls) as output. These calculations have been found to be ingood correlation with experimental data [59–65], and the first simulations of this kind [45]date back to 1980’s.
Another option for calculating deposition profiles is based on using analytic expressions;successful calculation of the film thickness distribution was shown by Swann et al. [66,67],and applied to different geometries including moving targets [68, 69]. Another approachbased on analytic expressions is given in [70].
3.5 Simulation of deposition
Works that focus on particle transport usually perform deposition simulation in a simplifiedform: it is considered that atoms come to the substrate and stop at the point where theyreach the surface. This approach neglects the film structure, possibility of particles tomove for some time at the surface, and probability of particles being reflected from the

30
substrate. It is still possible to perform analysis of energy distribution of atoms arriving onthe substrate [71, 72].
Obviously, neglecting film structure is not always correct, and that is why in some otherworks (see, e.g., works by Tupik et al. [73–75]) a more detailed simulation of film growth isperformed, which allows to perform a more sophisticated analysis of the surface structure,and how parameters like gas pressure, deposition rate, and (probably, most importantly)substrate temperature influence it, while there are also work that distinguish several modesof deposition in MS [76, 77].
Current work does not include these more detailed simulations of deposition processes,since it is not the objective of the work to estimate influence of external parameters on thesurface properties, but more on the film uniformity, which can be done in a way describedabove, simply neglecting any surface structure.

31
4 EXPERIMENT DESCRIPTION
4.1 Experimental setup
For magnetron sputtering experiments, a vacuum chamber was used with two vacuumpumps: Pfeiffer HiPace 80 and Franklin Electric Varian TriScroll. For measuring pressurein the chamber MKS 275 Mini-Convectron and MKS Baratron 627B pressure transducerswere used. For letting argon in the chamber, a valve with manual control was used. Thechamber with magnetron inside is shown in Fig. 13.
The power supply used was able to give current of 2.5 A with voltage of 650 V (i.e. up to1625 W).
4.2 Experiment process
In order to perform the sputtering, a 4 inch substrate of silicon was placed in the chamberat the desired distance (50 mm, 70 mm, 100 mm or 150 mm from target) coaxially andparallel to the target.
After closing the chamber gas was pumped out with subsequent use of the two pumps,to the pressure of less than 5× 10−4 Torr. After that the gas was let in for the pressure toestablish at desired value (e.g. 5 mTorr), and it was possible to strike the plasma.
The process was held for a needed amount of time (generally, the higher the current, theless time it is needed to continue sputtering – the deposition rate is normally proportionalto applied power [78]), and then the power supply was turned off. The chamber was notpumped up for 15 to 40 minutes, in order for the substrate to cool down in low pressure ofargon.
4.3 Measurements description
In order to measure deposition profiles, a Veeco Dektak 150 profiler was used; every timebefore a deposition, a mask was put on top of the substrate, so that there is a stripe on thesubstrate which was free of deposited film, so that it is possible to measure the step heightat different radial positions on the substrate.
4.4 Original magnetron
It was decided to verify correctness of simulations by experiments conducted with originalmagnetron. The original magnetron is shown with a target above it in Fig. 14.

32
Pressuretransducer
Substrate
APowersource
− +
T–Sdistance
To pumps
Watercooling
Target
Magnetron
To argon
Gas flowvalve
Rotatableshutter
Plasma
Figure 13. Schematic picture of the chamber used for experiments.

33
Figure 14. Sketch of original magnetron with a target above it, as input data for simulation.
Original magnetron is used for sputtering of 3 inch targets, with thickness of 6.3 mm andradius 38.1 mm; the target is placed directly above the magnetic array.
The original magnetron consists of an inner magnet with RinnerM = 7.5 mm and 24 outer
magnets with RouterM = 3.7 mm that make up a whole circle. The radius of circle is
Router = 37.5 mm, which is between the centers of an inner magnet and a magnet on thecircle. The inner magnet has its S-side up, while the outer magnets have their N-sides up.
Height of all magnets isH innerM = Houter
M = 2 mm; all magnets are NdFeB-magnets, whichhas Br of 11 750 G.
Cooling of the magnetron is performed by a water-cooling system under the target.

34
5 COMPUTER SIMULATION OF PROCESSES IN MAG-NETRON SPUTTERING APPARATUS
5.1 Description of the program
For the purposes of this work, there is need to calculate MF, erosion profile on the target,and deposition profile on the substrate. Also, it is preferable to have a tool for creatingthe layout of the magnetron, which would allow to change the geometrical features ofarrangement of magnets and easily see the changes.
In order to meet the above-mentioned requirements, a program has been written in MAT-LAB. To this program a graphical user interface (GUI) has been added, which has four tabs:Build Magnetron, Calculate MF, Simulate Electrons Motion, and Simulate Deposition.
MATLAB was chosen for these calculations due to a wide range of different mathematicalfunctions (including a built-in default MT RNG – see subsection 3.2.1.1), fast calculationof big arrays, and good capabilities for data visualization.
Some of the simulations are time consuming, so they could take up to 6 hours; however,all simulations were performed on two Intel Core i5 PCs.
5.2 Calculation of magnetic field
5.2.1 Description of the calculation
In order to calculate the MF, an approximation of scalar magnetic potential [37, 79] wasused, as suggested by Murphy et al. [80]. This approximation implies that the magnets’poles are “magnetic charges”, that make calculation of MF similar to that of EF, giventhere are no currents in the calculation domain.
The scalar magnetic potential in a given point was calculated as following:
ϕm =1
4π
∫V
R · dmR3
=1
4π
∫V
R ·MR3
dV ′ =1
4π
rm∫0
2π∫0
hm∫0
R ·MR3
Rdzdθdr (5.1)
where M is the magnetization, dm = MdV ′ is an elementary magnetic moment, rm isthe magnet’s radius, hm is the magnet’s height, R = |r− r′| is the distance from the pointwhere the MF is being calculated to the elementary source, and R = r− r′.
For a ring-shaped magnet, limits of integration in Eq. 5.1 are to be made:

35
ϕm =1
4π
router∫rinner
2π∫0
hm∫0
R ·MR3
Rdzdθdr, (5.2)
where rinner and router are, respectively, inner and outer radius of the ring-shaped magnet.
When calculating ϕm for a magnet situated at some angle with respect to xy-plane, theequation was not changed, but r′ (which is the point inside the magnet – elementarymagnetic source) was obtained by sufficient rotation of the coordinate inside magnet, andonly after that R and then R were calculated.
The value of ϕm was calculated at all points of the calculation domain, as required by the3D finite element method (FEM), this is the most time-consuming in the MF calculation.The triple integration procedure was performed with MATLAB built-in integral3
function.
In order to increase the speed of calculations, only 1/4 of the whole volume was calculated,and the rest of the data was obtained by flipping the values that had been calculated,considering the axisymmetrical nature of the MF.
Values of MF can be obtained as
H = −∇ϕm;
B = µ0H = −µ0∇ϕm.(5.3)
Inside the magnet, where there is magnetization, the MF was considered equal to Br withM = Br
µ0.
5.2.2 Obtained results
For the original magnetron, which has been previously described in 4.4, the obtainedmagnetic field configuration is given in Fig. 15.
As seen from the figure, the magnetic field is unbalanced, and, when calculating theg-coefficient (see 2.4.2.1), the ZBZ=0 ≈ 36 mm, while RT = 38.1 mm, so g =
ZBZ=0
RT≈
0.944, which, according to Table 1, implies that the magnetron is “extremely unbalanced”.
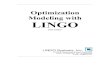
The most important in MS is MF just above the target, its radial component just above thetarget is plotted in Fig. 16, along with results of measurements and calculations in COM-SOL. The measurements were performed with a Hall Probe F.W.Bell 5170 Gaussmeter.It was noticed that the MF calculations performed with the Eq. 5.1–5.3 give good results,which fit the experimental data better than COMSOL results.

36
−40 −30 −20 −10 0 10 20 30 40−20
−10
0
10
20
30
40
50
60
x, mm
y,m
mTargetN-pole of magnetS-pole of magnetMagnetic field lines
Figure 15. Magnetic field lines as calculated for original magnetron (cross-section, scale 1:1).
0 5 10 15 20 25 30 35 40 45
−500
0
500
1,000
1,500
x, mm
Bradial,
G
COMSOL resultsMeasurements resultsResults obtained by calculations
Figure 16. Comparison of MF obtained by the calculations in MATLAB, by simulation in COM-SOL, and by measurements.
As seen from figure, the maximum radial component of MF Bmaxr ≈ 800 G, which is a
significantly higher value than usual values of MF strength reported in literature [43, 81].

37
After the calculation of MF with steps of ∆x = ∆y = ∆z = 3 mm, linear interpolationwas used for obtaining the MF values in further calculation: the step of the calculation issmall enough to neglect the higher orders, and other ways of interpolating decreased thespeed of calculation.
5.3 Calculation of electric field
As said in subsection 3.1.2, EF in a magnetron discharge is not uniform, so in orderto calculate it an improved Child–Langmuir law [41] was used as suggested by [82].This approach implies that there are no collisions and sources of charged particles inplasma, which is not strictly true, so use of this equation is an approximation; however, thesheath size is small enough to neglect some of features of EF, e.g. in [83] it was simplyapproximated as a polynomial.
The calculations go as follows:
η′′ =(
1 +2η
M2
)−1/2
− e−η; η′ = −21/2
[M2(
1 +2η
M2
)1/2
−M2 + e−η − 1
]1/2
; (5.4)
ηw = −ecϕwkbTe
; b =1
1− ηwη′′w/eη′w2 ; d = −bηwη′w
; a =ηwdb
; (5.5)
η(ξ) = a(d− ξ)b, ξ ≤ d;
η(ξ) = 0, ξ > d(5.6)
and then it is possible to obtain potential as
ϕ(d) = −η(ξ)kbTeec
(5.7)
where η is the dimensionless electric potential, η = − ecϕkbTe
(ec is elementary charge, ϕ ispotential, kb is Boltzmann’s constant, and Te is electrons temperature), ξ is dimensionless
distance, ξ = xλD
= x(n0e2
ε0kTe
)1/2
(x is distance, n0 is concentration of electrons, ε0 ispermittivity of vacuum), M is Mach number; d is dimensionless sheath thickness. Thus,in order to calculate the EF, one needs to convert all the values to their dimensionlesscounterparts, and then to convert them back after the calculation; EF values could becalculated as
E = −gradϕ, (5.8)
or, since EF is considered only z-dependent,
E =[0; 0;−dϕ
dz
]. (5.9)

38
A typical EF is shown in Fig. 17. The magnitude of EF at highest points is of the order of105 V m−1, because the sheath length as calculated by the Child–Langmuir law is of theorder of one to several millimeters. In fact, the EF in the presheath region (for the given
6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12−400
−300
−200
−100
0
z, mm
Pote
ntia
l,V
6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12
−4
−2
0·105
z, mm
Ele
ctri
cfie
ld,V
m−1
Figure 17. A typical EF used in simulation (target ends at z = 6.3mm).
figure, for z > 7.5 mm) is not strictly zero, but the value of it is small enough (about2 V m−1 to 3 V m−1) to be neglected, since it does not influence the motion of electrons, butbrings ambiguity in the way to calculate the potential energy of electrons.
Another assumption made about the EF is that it is not dependent on MF strength, which isalso not strictly true; however, the existing data is rather controversial [81, 84]. It has beenshown [85] that the effect is not too noticeable for MF strength less than 1000 G, whichallows to neglect this change.
5.4 Simulation of electrons motion
5.4.1 Description of the model
The electrons are born on the surface of the target (as a result of secondary electronemission) and in plasma (as a result of ionization).
During the simulation, the first electron is always generated on the surface of the targetwith initial energy equal to zero. Its actual energy is expected to obey Maxwellian or

39
Druyvesteyn distribution [86], but after being created on the surface of the target, theelectron is about to obtain several hundred electron-volts of energy while being acceleratedthrough the sheath region, so the value of initial energy brings mistake small enough toneglect it.
After creating of an electron, its motion is simulated. It is assumed that the electron moveswith the following equation of motion:
x =ecme
(E + x×B), (5.10)
where x is the coordinates of the electron, ec is the elementary charge, me is the mass ofelectron, E is the EF vector, and B is the MF vector.
While in plasma, electron suffers collisions, which may lead to loss of some of its energy.Elastic, excitation and ionization collisions are considered.
When the electron appears to have less energy than the smallest excitation energy, then thenext electron is being processed.
5.4.2 Assumptions made for electrons simulation
Following assumptions preceded the calculations:
• Concentration of charged particles is small – magnetically enhanced plasma can betreated as a low-ionized plasma (usually, for commonly used pressures of 1 mTorrto 10 mTorr, NAr+ ≈ 1016 m−3 to 1018 m−3 [81, 84, 87], while concentration of neu-tral species is of the order of 1020 m−3, which allows to neglect ionized species).Therefore, there is no need to consider electron–electron collisions, or electron–ioncollisions;
• The concentration of sputtered atoms is low – it is possible to neglect interactionsbetween electrons and sputtered species;
• There are no fluctuations of gas pressure in time and/or space – the gas rarefactioneffect [88] is neglected;
• The discharge has already started and come to a steady-state – the simulation is notself-consistent, and no estimates are made whether the plasma is possible with thegiven conditions;
• The voltage is not radial-dependent – since the simulation is not self-consistent, noattempts are made to estimate the actual potential distribution in plasma; this, forany point given, E = [0; 0;Ez], where Ez is obtained by linear interpolation from

40
values calculated as described in 5.3; this is not strictly true and there is some radialdependency of the EF [87].
• There is no MF created by the electron current in sheath region of plasma;
• The target is new – the existence or growth of erosion profile was not simulatedin current work; in reality the shape of the erosion profile changes insignificantlyduring the process, as it grows [89].
5.4.3 Procedure of simulation
For the integration, 4-th order Runge-Kutta method (RK4) [90] has been used. The methodhas been changed so that it was possible to apply it to a second order differential equation,it allowed to perform transformation of following form:
vnew = F (v0,S0);
Snew = G(v0,S0),(5.11)
where vnew and Snew are new velocity and position, while v0 and S0 are old velocity andposition. The whole procedure was completed as follows:
k1 = v0∆t; l1 = − e
me
(E0 + v0 ×B0)∆t
k2 =
(v0 +
l12
)∆t; l2 = − e
me
(E1 +
(v0 +
l12
)×B1
)∆t
k3 =
(v0 +
l22
)∆t; l3 = − e
me
(E2 +
(v0 +
l22
)×B2
)∆t
k4 =
(v0 + l3
)∆t; l4 = − e
me
(E3 +
(v0 + l3
)×B3
)∆t
(5.12)
andvnew = v0 +
l1 + 2l2 + 2l3 + l46
Snew = S0 +k1 + 2k2 + 2k3 + k4
6,
(5.13)
where Bi and Ei are, respectively, MF and EF found at corresponding position of theelectron.
In order to decrease the error of calculation without the loss of accuracy, an adaptivetimestep was used in the calculation, which was using the error in total energy as a measureof the calculation error.

41
A negative feedback was used to “shift” the mean energy error closer to zero, so that, evenif the result is not fully accurate, the program at least does an attempt to decrease theaccumulated error.ε
All further calculations were performed with a timestep limits of ∆tlow = 2.5 ps and∆thigh = 100 ps, as it was found that with this timestep limits and error bounds thecalculations take reasonable time and produce results which are accurate enough. In caseif more precision is needed, the limits can be changed.
At every step of integration, the probability of a collision was estimated. The cross-sectionsof different types of collisions were obtained from tabulated data [91], and the collisionprobability for a given type of collision was calculated as
Pi = Ngas|∆v|σidt =p|vel|σikbTgas
∆t, (5.14)
where Ngas is the concentration of gas, ∆v = vel−vatom ≈ vel (atoms can be consideredstationary, as Tgas = 300 K), σi is the collision cross section for the given type of collision,kb is the Boltzmann constant, Tgas is the gas temperature (it was considered equal to roomtemperature), p is gas pressure in chamber, and ∆t is the current time step.
After calculating the probability of all types of collisions, a random value Rcollision wasgenerated, and ifRcollision ≤
∑Ni=1 Pi, then a collision has happened, and the parameters of
a collision were calculated, while the type of collision was predetermined by the Rcollision.
In order to calculate the angle of scattering, the differential cross sections in form of dσdΩ
(where σ is the cross-section, and Ω is the angle) are needed; but in order not to usetabulated data, an equation was used instead (as described in [50, 92]):
f(ε, χ) =ε
4π[1 + ε sin2 χ/2
]ln (1 + ε)
; with
π∫0
2πf(ε, χ′) sinχ′dχ′ = 1,(5.15)
where ε is energy given in electronvolts and χ is the scattering angle.
This equation considers the main features of electron scattering: for energetic electronsforward scattering dominates, while for electrons with low energy the scattering is close toisotropic. The plot illustrating the equation is given in Fig. 18.
In order to calculate the angle of scattering, a random number Rangle was generated, andthen the angle χ was obtained as:

42
0100
200300
400500 0
60
120
180
0
0.5
1
1.5
2
Energy, eV χ,
2πf
(ε,χ
)si
nχ
Figure 18. Normalized differential cross sections used in electrons simulation.
Rangle =
χ∫0
2πf(ε, χ′) sinχ′dχ′ (5.16)
In order to calculate azimuthal angle, a normalized vector nv = [Rv1 ;Rv2 ;nv3 ] wasgenerated, where nv3 was calculated so that nv ⊥ vold, and a rotation matrix Rχnv wasconstructed as follows [93]:
Rχnv =
cosχ+ n2v1
(1− cosχ) nv1nv2(1− cosχ)− nv3sinχ nv1nv3(1− cosχ) + nv2sinχ
nv2nv1(1− cosχ) + nv3sinχ cosχ+ n2v2
(1− cosχ) nv2nv3(1− cosχ)− nv1 sinχ
nv3nv1(1− cosχ)− nv2sinχ nv3nv2(1− cosχ) + nv1sinχ cosχ+ n2v3
(1− cosχ)
. (5.17)
With use of the matrix the rotation of velocity vector is performed as
v = Rχnv · vold. (5.18)
These formulae for calculating a scattering angle can be applied to calculation of all typesof collisions, but the energy loss will be different in all cases.
In case of elastic collision, the energy loss is negligible; for excitation collisions, the energyloss is either 11.55 eV, 13 eV, or 15 eV, depending on the initial random number Rcollision
and cross-sections of different excitation types.

43
In case of ionization collision, the initial energy loss is 15.6 eV, but there is also energythat goes to the emitted electron. Cross-sections of collisions with various incident electronenergies are given in Fig. 19.
10−1 100 101 102 10310−5
10−4
10−3
10−2
10−1
100
Energy of emitted electron, eV
Cro
ss-s
ectio
n,Å
2
Einc = 50 eVEinc = 200 eVEinc = 800 eV
Figure 19. Differential ionization cross sections for argon, for different energies of incidentelectron.
The value is calculated as
S(Einc, T ) =13.2
EinclnEinc + 120/Einc
15.76
10.32
[T − T0(Einc)]2 + 10.32, (5.19)
whereT0(Einc) = 2− 100
Einc + 10, (5.20)
Einc is energy of incident electron expressed in eV, and T is the energy of emittedelectron [94]. This dependency is normalized, and then the energy is chosen according toMonte-Carlo method.
After the ionization occurs, the time value, position, and energy of the new electron arerecorded for further simulation, while for the moment simulation of the initial electron iscontinued until its energy is smaller than 11.55 eV.

44
When at some point the energy of an electron is too small – less than the smallest excitationpotential – a new electron is generated. There are two possibilities for the new electrongeneration:
• Secondary electron emitted from a target – in this case the position of an electron ischosen based on the previous ionization events (normally it takes about 50 electronsto get the ionization profile similar to the erosion profile of target), and the energy isconsidered zero;
• Primary electron emitted from an ionization site – in this case the electron from thequeue is chosen with the smallest time value.
It has been reported [34] that the secondary electron emission coefficient (γ, i.e. numberof electrons “sputtered” from target by one incident ion) is difficult to measure, but forCu a value of 0.082 was proposed [95], and it was used in current work, but also smallprobability was left for a “spontaneous” emission of an electron from target from a randomlocation.
This simulation of electron’s motion continues until a predetermined number of electronshas been simulated. It has been seen that in order to obtain repeatable enough results oferosion profile at least 300 electrons are to be simulated, because with fewer simulatedelectrons some details of the erosion profile do not appear. for getting better results thesimulations are to be conducted several times, to eliminate the dependency on the historyof current simulation.
5.4.4 Results of simulation of electrons motion
After the simulation of every single electron, its trajectory is obtained, which begins atthe place it was “born” and finishes at the place where it left the calculation domain orlost its energy due to collisions. Example of one electrons trajectory is given in Fig. 20;the depicted electron is a secondary electron, that is why its initial energy is equal to thecathode potential (400 eV in this case), and it is able to perform 7 inelastic collisions.
5.4.4.1 Erosion profile
From the simulation of electrons, one may obtain the erosion profile, which is calculatedas radial dependency of density of ionization events; this profile can be compared with theracetrack that occurs on the target after performing the sputtering.
Another option involves more accurate simulations of ions motion towards target, since itis possible that there are collisions during their motion in CDS, however, for low pressures

45
Figure 20. Trajectory of electron movement in the original magnetron. Green dots illustrateionization collisions, cyan dots show excitation collisions, while elastic collisions are depicted byblue dots.
that are normally used in MS these collisions are not considered a dominant process [38],and results shown by [96] indicate that higher precision of the erosion profile was obtainedby assuming that the ions travel directly towards the cathode.
The racetrack was measured with the profiler, and the results of the measurements werecompared to the results of simulation. This comparison is given in Fig. 21; as seen fromthe figure, the erosion profiles fit well.
5.4.4.2 Depth of erosion
From this erosion profile the actual depth of erosion can be found with an equation thathas been derived as follows:
Vetch =msputtered
ρT=MTNsputtered
ρT=MTNi+ Y
ρT=MT ItY
ecρT, (5.21)
where Vetch is the volume etched in the target, msputtered is the mass of sputtered material,ρT is the density of target, MT is the mass of a target atom (MT = µT
NA, where µT is the
molar mass, and NA is the Avogadro number), Nsputtered is the number of sputtered atoms,Ni+ is the number of ions arriving to the target, Y is the sputtering yield, which can becalculated as described in [56], I is the current that has been used in the sputtering, t is thetotal time of process, and ec is an elementary charge.

46
0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
r, mm
Ero
sion
profi
le,a
.u.
Measurements with profilerSimulation results
Actual depth: 643 µm;Calculated depth: 627 µm
Figure 21. Comparison of simulated erosion profile with the measured one.
On the other hand, the etched volume can be calculated as
Vetch = Vmax. etchh
htarget= ηVtarget
h
htarget= ηπR2
targethtargeth
htarget= ηπR2
targeth,
(5.22)where Vmax. etch is the maximum volume that can be etched (at the point that a hole isetched in the target), h is the maximum depth of erosion, htarget is the thickness of thetarget, Rtarget is the target radius, η is the target utilization, which is
η =VusedVtarget
=
∫ Rtarget
0h′(r)2rdr
R2target
(5.23)
with h′(r) being the normalized erosion profile which comes as a result of simulation.
Combining equations 5.21–5.23, one can obtain:
MT ItY
ecρT= ηπR2
targeth⇒ h =µT ItY
NAecρTηπR2target
=µT ItY
2NAecρTπ∫ Rtarget
0h′(r)rdr
;
(5.24)or, for a more general case,
h =µT∫ t2t1Y (t)I(t)dt
2NAecρTπ∫ Rtarget
0h′(r)rdr
≈ µT∑N
i=1 Y (Vi)I(Vi)∆t
2NAecρTπ∫ Rtarget
0h′(r)rdr
. (5.25)

47
For the used copper target, which was used with V = 300 V, I ≈ 75 mA for 1957 min,the equation gave result of 627 µm, while the actual result obtained with the profiler was643 µm, which is close enough to use equations 5.24 and 5.25 for estimating the depth oferosion.
5.4.4.3 Efficiency of confinement
Another important result that can be obtained after the simulation is the statistics concerningelectrons. One can check what is the average time spent by electrons in plasma until it islost for some reason, or how many ionizations one electron completes. For assessing theeffectivity of electrons confinement in plasma, a value of total ionization effectivity wasintroduced, which is
i =〈I〉EiUC
, (5.26)
with 〈I〉 being the average number of ionizations completed by electrons, Ei being theionization energy (15.6 eV for argon), and UC being the absolute value of cathode potential.
From the simulation of electrons motion it can also be seen that there are some electronsthat are lost from plasma; they follow the magnetic lines and end up close to the substrate.This can be explained by the fact that the magnetron is unbalanced, and this process allowsthe ions to flow to the substrate and heat it.
5.5 Simulation of deposition process
5.5.1 Description of the model
Simulation of deposition included following steps:
• Sputtering – generating an atom with some energy and initial angle;
• Transport of atom with collisions;
• Transport of thermalized atoms;
• Deposition on a substrate.
5.5.2 Sputtering simulation
In order to simulate sputtering process, the erosion profile from subsection 5.4.4 is used togenerate the initial radial position of an atom with use of Monte-Carlo method.

48
After that the energy and angle are generated. As mentioned in subsection 3.3, TRIMcode [57] or Sigmund–Thompson model [51] can be used for such simulations, but bothapproaches have certain drawbacks. TRIM code is computationally expensive, and it is notpossible to include this code into another simulation, so in this case it would be neededto perform the TRIM simulation every time there is a need for simulation of depositionprocess. Sigmund–Thompson distribution shows good agreement with experimentaldata, but does not have any angular dependency, which is not correct. Also, the angulardistribution is considered to be cosine, which is not always the case.
Thus, for the simulation, an improved Sigmund – Thompson model was adopted assuggested in [54], which includes angular dependency, so that
J(E) ∝ JT (E) exp
[−A
(MG(E cosq1 θ + Ub)
MTE0
)q2](1− E + Ub
Emax + Ub
), (5.27)
where MG is mass of ion, MT is mass of target species, q1 ≈ 2− MT
4MG, A = 13, q2 = 0.55,
and Emax is the maximum energy of emitted particles; for Cu under Ar+ bombardment itis 0.35Eion; JT (E) is a conventional Sigmund–Thompson distribution [51] calculated as
JT (E) = E(E + Ub)−3+2m, (5.28)
where E is energy of sputtered species, Ub is binding energy, and m = 1s+1
with s =
2.97 + 2.60(Z
2/3G + Z
2/3T
)−1/2
[54].
A model proposed in [54], which is different from simple cosine distribution implied bySigmund–Thompson theory, was checked for angular distribution, The angular distributioncan be either under-cosine or over-cosine2, but it was found that for the case beinginvestigated (copper target and argon gas with voltages between 300 V and 600 V) theangular distribution is close to cosine (as shown in Fig. 22), thus a cosine distribution wasused from calculation speed considerations.
0
30
6090
120
150
1800 0.5 1 θ,°
Cosine distributionDistribution from [54]
Figure 22. Comparison of angular distribution from [54] and cosine distribution.
2This model still neglects cases with a minimum at 90°

49
5.5.3 Motion of sputtered atoms in gas. Calculation of scattering
Sputtered particles are not charged, and it is possible to approximate their motion inrectilinear parts, between which they collide with gas atoms. The sputtered atoms travel adistance of λ∗, which is calculated as λ∗ = −〈λ〉 lnRλ, with Rλ being a random numberand 〈λ〉 the mean free path. Mean free path can be calculated from the collision crosssection as follows:
〈λ〉 =1
Ngasσ=kbTgaspσ
, (5.29)
and, according to hard sphere approximation, molecular kinetic theory and an empiricaldependency of σ on energy [59, 64, 65],
〈λ〉 =EakbTgas
πp(rT + rG)2√
1 + µTµG
, with a =
0.29, E > 1 eV
0, E ≤ 1 eV.(5.30)
Another option for calculating σ involves using maximal impact parameter bmax instead ofEq. 5.30 (procedure of calculating bmax is described in following paragraphs); in this case
σ = πb2max, (5.31)
and therefore,
〈λ〉 =kbTgasπpb2
max
, (5.32)
where bmax is the maximal considered impact parameter for given energy.
When a collision occurs, the angle of scattering is calculated. The procedure goes asfollows:
1. The energy is converted to the center-of-mass (COM) system as
ECOM = ElabµG/µT
1 + µG/µT, (5.33)
where Elab is the energy of a sputtered atom in the laboratory frame. Since thebackground gas is considered to be at room temperature, its energy can be neglected.
2. A system of three equations is solved simultaneously:
2θCOM = π − 2b
∞∫r0
dr√r2[1− V (r)
ECOM−(br
)2] ; (5.34)

50
b2 = r20
(1− V (r)
ECOM
); (5.35)
b = bmax√Rb, (5.36)
where θCOM is the angle in COM frame, b is the impact parameter (the minimaldistance between two atoms if no scattering happened), V (r) is the interactionpotential (it will be discussed later), r0 is the distance of closest approach, Rb is arandom number, and bmax is the maximal impact parameter, at which θCOM is biggerthan a chosen value (1° was used3) [59, 64, 97].
3. After finding θCOM it is possible to obtain θlab as
θlab = arctansin θCOM
cos θCOM + µT/µG. (5.37)
For calculating 〈λ〉 different approaches were used, both considering MKT by Eq. 5.30and considering the approach shown by Eq. 5.32; it was found that best results are obtainedwhen Eq. 5.30 is used with bmax calculated for maximal scattering angle of 10° and whenEq. 5.32 is used with bmax calculated for maximal scattering angle of 1°. The latterapproach was used for calculations presented in following sections.
When solving equations 5.34–5.36, it is needed to choose the interaction potential – mostcommon options include a screened Coulomb interaction, Lennard–Jones potential or Born–Mayer potential. It is worth mentioning that the integrand meets a singularity at r = r0,which brings difficulties into the calculation process. There is also an approximationpresented in [98] which can perform the calculations in much faster manner, because thereis no need for integrating.
These options can be illustrated by Fig. 23, which shows four of the mentioned possibleoptions (for Screened Coulomb potential, Molière screening function with Firsov screeninglength was used).
There is little difference in case of using integration for calculating of the angle, while theapproximation from [98] does not fully fit the curves. For further calculations Born–Mayerpotential was used with following equations:
V (r) = A12e−B12r, (5.38)
where A12 =√A1A2 and B12 = B1+B2
2; Ai and Bi are are parameters of Born–Mayer
interaction for interaction of same species, while Aij and Bij are parameters for the case
3For using a small enough value here, there is an obvious need for precise enough calculation of θCOM ,which depends on the integration procedure and is described further

51
0 1 2 3 4 5 6 7 8 9 100
20
40
60
80
100
120
140
160
180
r, Å
θ CO
M,°
Calculating usingLennard–Jones interaction
Calculating usingBorn–Mayer interaction withAbrahamson’s potential
Calculating usingScreened Coulomb interaction(Molière screening)
Calculating with theapproximation from [98]without integral
Figure 23. Options for calculating scattering angle.
of different atoms. Current work uses parameters for Born–Mayer interaction calculatedby Abrahamson [99].
To deal with the singularity during the integration, a substitution has been made [71]:
u =r0
r(5.39)
and then
θ = π − 2b
r0
1−ε∫0
du√1−
(br0
)2
u2 − V ( r0u )
ECOM
, (5.40)
where ε→ 0 (for this simulation, ε = 5× 10−6 was used); the closer ε to zero, the higheris the precision of the calculation. It can be characterized by the “residual” value of θCOMfor values higher than bmax (for example, see Fig. 23 for r > 6 Å).
For increasing the speed of calculations, a 3D-table of θCOM , b, and ECOM have beencalculated, as well as a table of ECOM and bmax, so it was only needed to find, firstly, thebmax for the given energy, generate b, and then to find a corresponding θCOM from thetable.
After finding the angle of scattering θlab, the direction of atom movement is altered in away like one described in equations 5.17 and 5.18 when applied to the velocity of electron.

52
The new energy of an atom after collision is calculated as
Elab new = Elab old
[1− 2 (1− cos θCOM)µGµT
(µG + µT )2
]. (5.41)
The process is repeated until the atom crosses boundaries of calculated domain, or until itsenergy is less than 0.03 eV energy, which is a value close to energy of the background gas.After that the atom is considered to be thermalized, and the physics changes.
For a thermalized atom, the mean free path is calculated by Eq. 5.30, but thermal radiiof atoms were used; the scattering was considered fully isotropic [71]. There was also apossibility for “switching off” the thermalization: it has been shown [100] that it plays animportant role only for target to substrate (T–S) distances big enough, and for gas pressuresbig enough.
5.5.4 Deposition of film
As boundaries of calculated domain, the walls of the chamber were used, while for upperboundary the substrate was used (i.e. the possibility of atom getting above the substrate,and then coming down and hitting it was neglected); and it was possible to use shifted (inx and/or y direction), tilted by angle β (around y axis) or rotated by angle γ (around zaxis) substrates.
In the calculations only circular substrates were considered. In the beginning, the plane towhich the substrate belongs was calculated; the equation of plane is given as
z cos β = z0 cos β − (x− x0) sin β sin γ − (y − y0) sin β cos γ, (5.42)
where x0, y0 and z0 are coordinates of center of the substrate.
After every move of the atom it is checked whether it has crossed the substrate plane, andin this case the coordinates of the intersection between the atom trajectory and the substrateplane – xi = (xi, yi, zi) – were calculated as:
t =cos β(z0 − zn) + sin β sin γ(x0 − xn) + sin β cos γ(y0 − yn)
cos β(zn − zn−1) + sin β sin γ(xn − xn−1) + sin β cos γ(yn − yn−1), (5.43)
and
xi = xn + (xn − xn−1) t (5.44)

53
where xn = [xn, yn, zn] are the last calculated coordinates of the atom, and xn−1 =
[xn−1, yn−1, zn−1] are the previous coordinates of the atom.
After simulations, an array of 3D dots is obtained, which contains the coordinates of allatoms that have hit the substrate plane; not all of them end up on the substrate itself, andafter performing the simulation a “transformation” is done of all these dots. The objectiveof this transformation is, firstly, to find which of the dots actually belong to the substrate,and secondly, to transform the coordinates from 3D to 2D in the coordinate system of thesubstrate plane.
In order to check whether a dot belongs to a substrate, the distance between the intersectionpoint and the substrate center were calculated; after that the coordinates of atoms that werefound to have arrived at the substrate were transformed to the coordinate system of thesubstrate as follows:[
x′
y′
]=
[(x− x0) cos γ − (y − y0) sin γ
[(x− x0) sin γ + (y − y0) cos γ] / cos β
](5.45)
After that [x′; y′] coordinates can be used for finding a deposition profile as:
hi = h(Ri) =Ni
π (Ri −Ri−1)2 Nsputtered
, (5.46)
where hi is the deposition height in a.u. (actually, the units appear to be at.m2 at.
, i.e. numberof deposited atoms per unit area produced by one sputtered atom), Ni is number of atomsthat have arrived at radius interval of [Ri−1, Ri], Ri is the i-th radius calculated as ∆R · iwith ∆R being a resolution of the deposition profile (0.16 mm were used for a 3 inchtarget), and Nsputtered is the number of atoms that had been simulated to obtain the givenprofile; this factor is required in order to be able to compare different deposition profiles:e.g., in case there is need to compare a deposition profile obtained at 10 cm and 5 cm, theformer would have a similar shape, but much fewer atoms from the target would reach thesubstrate, and it would be the major difference.
5.5.5 Results of deposition simulations
5.5.5.1 Deposition profile
Eq. 5.46 can be used to plot the deposition profile and compare it to the one obtainedduring experiments.
The results obtained by the simulation were compared to experimental results. Copper wassputtered on silicon with pAr = 5 mTorr, V = 300 V for 30 minutes at three different target

54
to substrate distances (T–S), and same parameters were used as input in the simulationprogram. The result of simulation of 150 000 atoms for each case, as well as experimentaldata are given in Fig. 24. As seen from figure, the simulation fits experimental data well.
0 5 10 15 20 25 30 35 40 45 500
200
400
600
800
r, mm
Film
thic
knes
s,nm
50 mm measured70 mm measured100 mm measured
50 mm measured50 mm simulated70 mm measured70 mm simulated100 mm measured100 mm simulated
Figure 24. Radial distribution of deposition thickness at three different distances, p = 5mTorr.
5.5.5.2 Optimization of target – substrate positioning. Multi-substrate simulation
A common application of simulations of deposition is for comparison of thickness anduniformity of films obtained in similar conditions but at various T–S mutual positions, andfor optimization of calculation time in such situations, a possibility was added to simulatedeposition on several substrate positions simultaneously; in this case the simulation of agiven atom stops only when either it has reached walls of the chamber or it has reached all
of the substrates being simulated; i.e. after hitting the first substrate the program ignores it,and atom keeps going “through” it.
Obviously, such simulation takes more time than simulation of deposition on one sub-strate, but it takes significantly less time than subsequent simulation of all the substrateswould take; for optimization of performance of this simulations various techniques wereused, such as vectorization (i.e. so-called implicit multi-threading in MATLAB) andcaching [101], which allowed to increase the performance up to 20 times.

55
Some of results of optimization of the target–substrate position are given in Fig. 25 (as ameasure uniformity, u = Hmax−Hmin
Hmax+Hminwas used).
0 1 2 3 4 5 6048
121620242832364044485256606468
Offset, cm
Uni
form
ity,%
T–S distance = 5 cm
β = 10°β = 20°β = 22.5°β = 30°β = 40°β = 50°
0 1 2 3 4 5 60
2.55
7.510
12.515
17.520
22.525
27.530
32.535
Offset, cm
Uni
form
ity,%
T–S distance = 10 cm
β = 10°β = 20°β = 22.5°β = 30°β = 40°β = 50°
Figure 25. Results of optimizing uniformity of deposition.
As seen from figure, for every β of a substrate, there is an optimal offset, at which theuniformity is best; these considerations always need to be paid attention to when designinga process. This method for increasing uniformity of deposition is often referred to asconfocal sputtering. Results found in current work and presented in the figure are incontradiction with results shown by suppliers of MS equipment [102, 103], so they are tobe checked experimentally.
This simulation used data of 200 000 atoms being deposited on 84 substrates, and its resultswere found to be repeatible enough to be used for optimization of the process – the errorbetween two simulations like this were less than 0.5 % in uniformity.
5.5.5.3 Thickness of deposited film
An equation for calculating the maximum thickness of deposition was derived in a mannerlike shown in subsection 5.4.4. The derivation goes as follows. The volume of deposited

56
film can be calculated as
Vd =
Rs∫0
h′(r)2πrdr, (5.47)
where h′(r) is the thickness of film, and Rs is the radius of the substrate; so a substitutioncan be performed, as h′n(r) = h′(r)
h′max; in this case
Vd =
Rs∫0
h′maxh′n(r)2πrdr = 2πh′max
Rs∫0
h′n(r)rdr, (5.48)
where h′n(r) can be found in simulation. On the other hand,
Vd =mdepositedT
ρT, (5.49)
where mdepositedT is the deposited mass of target material;
Vd =NdepositedMT
ρT=γNsputteredMT
ρT, (5.50)
where γ is the proportion of sputtered atoms that arrive on the substrate (i.e. γ =Ndeposited
Nsputtered)
which can be obtained from the simulation, Nsputtered is the number of sputtered atomswhich has already been derived in subsection 5.4.4 as Nsputtered = ItY
ecwhere I is the
current that has been flowing in the system, t is the time of deposition and Y is sputteringyield.
Thus,
Vd =γItY µTecNAρT
, (5.51)
and, combining it with Eq. 5.48,
hmax =γItY µT
2πNAecρT∫ Rs
0h′(r)rdr
, (5.52)
or, for a more general case,
hmax =γµT
∫ t2t1Y (t)I(t)dt
2πNAecρT∫ Rs
0h′(r)rdr
≈ γµT∑N
i=1 Y (Vi)I(Vi)∆ti
2πNAecρT∫ Rs
0h′(r)rdr
. (5.53)
Normally the conditions of discharge remain constant within one process, so Eq. 5.52 canbe used in most cases.

57
The given equation has shown good agreement with experimental data, as shown in Table 2for the same samples as in Fig. 24 – i.e. for samples obtained at V = 300 V, p = 5 mTorr
but with different T–S distances.
Table 2. Comparison of measured and calculated thickness of film.
T–S distance, mm Measured hmax, nm Calculated hmax, nm
50 827.6 800.770 450.8 448.1
100 221.6 227.7
As seen from the table, the equation can be used to give estimates on thickness of film.

58
6 DESIGN OF A MAGNETRON
6.1 Cathode geometry considerations
Contrary to the original magnetron that was described in section 4.4, in a new magnetronit was decided that there needs to be an insulator between the target and the magnets, sothat the chamber can be baked at high temperature (about 200 C); this insulator increasesthe distance between the target and the magnets.
Another change was concerning the diameter of the cathode. Since for some applicationsit is good to use more than one sputtering source, attempts have been made to make thediameter of the sputtering head as small as possible. It is obvious that it cannot be lessthan the diameter of the target itself (7.62 cm), but the smallest heads on the market are ofdiameter of about 9 cm, which implies that all the magnets lie strictly under the target withabout 1.4 cm given for anode shield and clipping of the target (on both sides, i.e. about0.7 cm given for the anode shield and clipping).
6.2 Magnetic field considerations
In order to characterize a given magnetron, one needs certain parameters that show whetherit is good or not. As these parameters, η and i were used. η is the target utilization,calculated as described in Eq. 5.23, i is total ionization efficiency which was calculatedas described in Eq. 5.26. For original magnetron, it was found that η = 30.7 %, andi = 9.7 %.
6.2.1 Optimal strength of magnetic field
Theory described by Goree and Sheridan [17] which was mentioned in subsection 2.4.1,was checked in simulations and found to be correct, so for a 3 inch target, the optimalBmaxr was calculated to be 450 G to 550 G.
6.2.2 Degree of unbalance
While ion bombardment assists during the magnetron sputtering process (see subsec-tion 2.4.2.1), having too much ion bombardment can be detrimental to more fragile films,and it was decided to focus on making the magnetron not too unbalanced, i.e. in betweenunbalanced and very unbalanced configurations as given by Table 1.

59
6.3 Considered options
Of all possible options concerning a magnetic array configuration, options involving usageof additional magnetic rings under the target were considered, because these options donot require too drastic changes in the configuration of the whole system, and do not makethe magnetron too big, so that multiple magnetrons can be used.
Also it was decided to use ring magnets instead of rings constituted from individual cylindermagnets; this allows to put more magnetization in less volume. It was found that putting aring magnet is not equivalent to placing a ring of cylinder magnets with equal volume.
In following sections multiple parameters of magnetrons’ configurations are given, so it isuseful to describe the notations: ∆d is width of a ring magnet, R is radius, H is height,or vertical spacing; upper index indicates the magnet that the parameter describes, andlower index M indicates that the parameter indicates the geometry of the magnet itself, incase there is ambiguity possible. Ring magnets are numbered in ascending order from thecenter of the magnetron. For example, Rinner
M is radius of inner magnet, RR2inner is the inner
radius of the second ring when counting from the center, HR1M is the height of the first ring,
while HR2 is the spacing between the second ring and the target.
Thus, following options were considered:
One additional vertical ring – Placing one additional vertical ring makes change offollowing parameters possible: H inner
M , RinnerM , RR1
inner, HR1M , ∆dR1 , HR1 , RR2
inner,HR2M and ∆dR2 .
Two additional vertical rings – Placing two additional vertical rings allows followingvariable parameters: H inner
M , RinnerM , RR1
inner, HR1M , ∆dR1 , HR1 , RR2
inner, HR2M , ∆dR2 ,
HR2 , RR3inner, H
R3M and ∆dR2 .
However, all these parameters in each of configurations are not to be completely indepen-dent: in this case the requirements concerning MF strength and degree of balance cannotbe always met. Thus, when searching for optimal configurations, some parameters wereleft for “manual adjustment” of the magnetron.
As a rule, parameters of each considered magnetron configuration were set based on someassumptions, and then the MF was checked for further manual changes. These preliminaryassumptions were following: VS , which is volume of all magnets with S-side up, was setto be equal to 7000 mm3, and kImb (see subsection 2.4.2.1) was set to 2.2.

60
6.4 Optimization of parameters of magnetron cathode
For optimizing a magnetron cathode parameters Taguchi method was implemented [104].This method allows to find certain correlation between input (geometry configurationparameters listed in previous section for each of possible configurations) and outputparameters (the target utilization η and ionization efficiency i2); in order to design thevirtual experiments, orthogonal tables were taken from [105].
6.4.1 Optimization of the magnetron
For optimization of this configuration of a magnetron following preliminary assumptionswere made:
• VS = 7000 mm3 – this preliminary value of the volume of magnets with S-side upwas used for all magnetrons;
• kimb = 2.2 – it was found that with this kimb the resulting MF is between “unbal-anced” and “very unbalanced”;
For the magnetron with one additional ring, the parameters being optimized were HR1 ,HR1M and ∆dR1 , and a L9 Taguchi table was used for this configuration.
For optimization of design of the two-ring configuration, L27 table was used. Possiblevalues of all variable parameters were divided into 3 levels each, as shown in Table 3. Otherparameters were set so that the MF strength is in required range, and so is the g-coefficientof unbalance.
Table 3. Parameters for optimization for a two-ring configuration (all values are given in mm).
Parameter Level 1 Level 2 Level 3
RinnerM 6 6.5 7
H innerM 18 20 22
∆dR3 3.5 4 4.5RR3outer 38.6 38.8 39
∆dR1 3 4 5HR1 3 5 7HR1M 12 9 6
∆RR1 R2 4 5 6∆dR2 1 2 3kH 1 1.2 1.4

61
For each of configurations obtained by corresponding Taguchi tables, one or severalsimulations of electrons movement were performed, after which the resulting parameterswere obtained.
These simulations allowed to find an optimal design, which uses two inner ring magnets.The optimized magnetron is shown in Fig. 26.
A A
A–A
Figure 26. Sketch of an optimized magnetron, scale 3:4; blue magnet has N-side up, while redmagnets have S-sides up; on A–A cross-sections also the target and gray insulator layer are shown.
These additional magnetic rings, firstly, make the MF more horizontal, as can be seen fromFig. 27, and, secondly, they shift the racetrack closer to the edge of the target. Even if theracetrack has same width, but is situated on larger radius, according to Eq. 5.23, it willlead to higher target utilization. Another aspect is that bigger radius of racetrack yieldshigher film uniformity, since it is equivalent to having a bigger target.
Bmaxr was calculated to be 478 G, which is in the desired range, while as can be seen from
Fig. 27, the point of Bz = 0 is ZBz=0 ≈ 50 mm, which yields g = 1.3 – an unbalancedconfiguration of the magnetron. The erosion profiles of both magnetrons are given inFig. 28.
After the optimization the target utilization was found to be around 34 %, and total ion-ization around 9.4 %, which shows improvement as compared to the original magnetron.There is also a significant improvement in the cathode geometry – the radius of the mag-

62
−40 −30 −20 −10 0 10 20 30 40−20
−10
0
10
20
30
40
50
60
70
x, mm
y,m
mTargetN-pole of magnetS-pole of magnet
Figure 27. Magnetic field of the new magnetron, scale 1:1.
0 5 10 15 20 25 30 35 40
0
0.2
0.4
0.6
0.8
1
r, mm
Ero
sion
profi
le,a
.u.
Original magnetronNew magnetron
Figure 28. Erosion profiles of new and original magnetrons. While width of new magnetron’sracetrack appears the same, improvement of target utilization appears since the radius of racetrackis bigger.

63
netic array is only 0.5 mm bigger than the radius of the target, with introduction of theinsulating layer between target and cathode, and still leaving the height of the cathodealmost unchanged (it became 2 mm taller, which corresponds to the 2 mm increase due toinsulator); because of the increase in racetrack radius, there is also an expected increase infilm uniformity, which has been predicted by simulations.

64
7 DISCUSSION
7.1 Current study
Current study presented the development and application of a program for simulationof processes in magnetron sputtering apparatus, and its application for design of a newmagnetron.
Speaking about the simulation of a magnetron discharge, it was found that a straightforwardapproach of modelling the electrons motion with direct Monte-Carlo method in 3D yieldsresults good enough to be used for estimating the erosion profile of the target.
Several parts of the program were created in order to make it as universal as possible. Thenew magnetron was developed with use of Taguchi methods; it has better geometry thanthe original magnetron (it is smaller in diameter which allows to use it together with othersputtering heads, and leaves space for the insulator between magnets and the target – itwas found that both of these changes were detrimental to the MF in terms of sputteringapplications), and still it has higher target utilization and same total ionizations coefficientas the original magnetron.
During current study also a program was written for optimizations of T–S mutual posi-tioning, which included a “multi-substrate deposition” simulation; it has been shown thatthe found results for optimal T–S position are not same as given by most of suppliers ofmagnetron sputtering equipment, which can either be due to errors in calculation or dueto over-simplification of the information that the suppliers give. This information can beused to give more accurate data about optimal parameters and best uniformity that can beachieved with a given magnetron and a given substrate size.
7.2 Future work
The program for simulating the magnetron discharge was written to be as flexible aspossible, so it can be used for further research as well – for example, it allows to simulateinfluence of additional MF described in some works [106, 107] without any additionalchanges – one just needs to add the magnets via graphical interface. However, there areother research targets that are to be addressed.
First of all, while this work focuses on development of a 3 inch magnetron, it makespredictions on the erosion profile, so it is required to build a working prototype and test itto confirm the obtained results.

65
Secondly, current study describes design of a 3 inch magnetron, the program and approachdescribed in previous chapters can be applied also to 1 inch, 2 inch, 4 inch or other sizesof magnetrons. It is expected that for smaller diameters of magnetrons the MF should bestronger, while there is less space left for the inner magnetic rings, which implies using oneinner ring (for the case of a 2 inch magnetron) or no rings at all (for the 1 inch magnetron).On the other hand, for 4 inch magnetrons or bigger, multiple plasma rings can be obtained,but it requires more serious approach in terms of designing the degree of unbalance.
Another approach involves design of application-specific magnetrons, i.e. a balancedmagnetron, a very unbalanced magnetron, a magnetron with higher target utilization(probably with moving magnetic arrays), or a magnetron with higher deposition rate.
Finally, it is required to check results obtained in deposition simulation for “multi-substrate”simulation, to confirm the optimal mutual T–S positions – during research of relatedliterature no investigations of such positions have been found, but it was only stated thatthe best position of target is 10 cm away from the substrate, facing RS
2at angle of 30°,
which was not found to correspond well with simulation results from current work.

66
8 CONCLUSION
While current work was focusing on development of optimal magnetic field for a magnetronsputtering source, it has fulfilled the needed task, i.e. in Chapter 6 a magnetron design wasproposed which was better than original design in a number of ways.
In order to perform this optimization, computer simulations have been performed accordingto the processes that take place in a magnetron sputtering apparatus – mainly of theformation of a magnetic field and motion of electrons – which allowed to address thedesign of a magnetron in terms of its parameters – target utilization and ionizationsperformed by one electron.
As an additional part of the thesis, the simulation of deposition processes was also per-formed, which showed good agreement with experimental data, while also producing someinteresting results concerning optimal T–S positioning.

67
REFERENCES
[1] John S Chapin. Sputtering process and apparatus, 1979. US Patent 4,166,018.
[2] C. A. Bishop. Vacuum deposition onto webs, films and foils. William AndrewPublising, 3rd edition, 2015.
[3] V. V. Luchinin and Yu. M. Tairov, editors. Nanotechnology: physics, processes,
diagnostics, devices (in Russian). Moscow Fizmatlit, 2006.
[4] A. Hideaki and W. Kiyotaka. Chapter 1 – Thin Films and Nanomaterials. In W. Kiy-otaka, K. Isaku, and K. Hidetoshi, editors, Handbook of Sputtering Technology,pages 3–39. William Andrew Publishing, Oxford, 2nd edition, 2012.
[5] D. A. Jameel. Thin film deposition processes. International Journal of Modern
Physics and Applications, 1(4):193–199, 2015.
[6] K. Seshan and D. Schepis. Handbook of thin film deposition. Elsevier, 2018.
[7] W. Kiyotaka. Chapter 3 – Sputtering Systems. In W. Kiyotaka, K. Isaku, andK. Hidetoshi, editors, Handbook of Sputtering Technology, pages 77–139. WilliamAndrew Publishing, Oxford, 2nd edition, 2012.
[8] G. Bräuer, B. Szyszka, M. Vergöhl, and R. Bandorf. Magnetron sputtering–milestones of 30 years. Vacuum, 84(12):1354–1359, 2010.
[9] Chapter 4 – The planar magnetron. In R. A. Powell and S. M. Rossnagel, editors,PVD for Microelectronics, volume 26 of Thin Films, pages 87–101. Elsevier, 1999.
[10] J. A. Thornton. Magnetron sputtering: basic physics and application to cylindricalmagnetrons. Journal of Vacuum Science and Technology, 15(2):171–177, 1978.
[11] J. Böhlmark. Fundamentals of high power impulse magnetron sputtering. PhDthesis, Institutionen för fysik, kemi och biologi, 2006.
[12] R. De Gryse, J. Haemers, W. P. Leroy, and E. Depla. Thirty years of rotatablemagnetrons. Thin Solid Films, 520(18):5833–5845, 2012.
[13] S. M. Rossnagel. Sputter deposition for semiconductor manufacturing. IBM Journal
of Research and Development, 43(1.2):163–179, 1999.
[14] T. Iseki. Completely flat erosion magnetron sputtering using a rotating asymmetricalyoke magnet. Vacuum, 84(12):1372–1376, 2010.

68
[15] D. Ferenbach, G. Steiniger, and J. Muller. Magnetron sputtering cathode for vacuumcoating apparatus, May 24 1988. US Patent 4,746,417.
[16] C. B. Garrett. Planar magnetron sputtering device, April 24 1984. US Patent4,444,643.
[17] J. Goree and T. E. Sheridan. Magnetic field dependence of sputtering magnetronefficiency. Applied physics letters, 59(9):1052–1054, 1991.
[18] B. Window and N. Savvides. Charged particle fluxes from planar magnetronsputtering sources. Journal of Vacuum Science & Technology A: Vacuum, Surfaces,
and Films, 4(2):196–202, 1986.
[19] N. Savvides and B. Window. Unbalanced magnetron ion-assisted deposition andproperty modification of thin films. Journal of Vacuum Science & Technology A:
Vacuum, Surfaces, and Films, 4(3):504–508, 1986.
[20] R. Brown and V. Bellido-Gonzalez. Comparison of balanced and unbalanced arraydesigns. Thin film and PV solution, 2013.
[21] D. A. Golosov. Balanced magnetic field in magnetron sputtering systems. Vacuum,139:109–116, 2017.
[22] Q. H. Fan, D. Galipeau, L. Q. Zhou, and J. J. Gracio. Computer-aided developmentof a magnetron source with high target utilization. Vacuum, 85(8):833–838, 2011.
[23] A. G. Spencer, C. A. Bishop, and R. P. Howson. The design and performance ofplanar magnetron sputtering cathodes. Vacuum, 37(3–4):363–366, 1987.
[24] Lawrence T Lamont Jr. Sputter target for use in a sputter coating source, July 31984. US Patent 4,457,825.
[25] X. H. Chen, Q. H. Fan, H. Y. Chen, and Y. Zhang. Symmetrical magnet magnetronsputtering method for improving target utilization. Review of scientific instruments,65(8):2693–2695, 1994.
[26] J. S. Park, L. S. Park, Y. S. Lee, W. G. Lee, and M. K. Jung. Cathode unitof magnetron sputter for high target utilization. Molecular Crystals and Liquid
Crystals, 514(1):201–531, 2009.
[27] Gabor Kertesz and Gyorgy Vago. Penning sputter source, August 4 1981. US Patent4,282,083.
[28] R. D. Arnell and P. J. Kelly. Recent advances in magnetron sputtering. Surface and
Coatings Technology, 112(1-3):170–176, 1999.

69
[29] P. J. Kelly and R. D. Arnell. Magnetron sputtering: a review of recent developmentsand applications. Vacuum, 56(3):159–172, 2000.
[30] P. J. Kelly and R. D. Arnell. The influence of magnetron configuration on ioncurrent density and deposition rate in a dual unbalanced magnetron sputteringsystem. Surface and Coatings Technology, 108:317–322, 1998.
[31] M. Yusupov, E. Bultinck, D. Depla, and A. Bogaerts. Behavior of electrons in adual-magnetron sputter deposition system: a monte carlo model. New Journal of
Physics, 13(3):033018, 2011.
[32] G. Buyle. Simplified model for the d.c. planar magnetron discharge. PhD thesis,Universiteit Gent, 2005.
[33] G. Buyle, D. Depla, K. Eufinger, J. Haemers, W. De Bosscher, and R. De Gryse.Simplified model for the dc planar magnetron discharge. Vacuum, 74(3–4):353–358,2004.
[34] A. Bogaerts, I. Kolev, and G. Buyle. Modeling of the Magnetron Discharge, pages61–130. Springer Berlin Heidelberg, Berlin, Heidelberg, 2008.
[35] COMSOL Multiphysics ® Modeling Software. https://www.comsol.com/, 2019.[Online; accessed March, 27, 2019].
[36] D. Meeker. Finite Element Method Magnetics: Homepage.http://www.femm.info/wiki/HomePage, 2014. [Online; accessed April, 16,2019].
[37] J. Vanderlinde. Classical electromagnetic theory, volume 145. Springer Science &Business Media, 2006.
[38] R. F. Bunshah. Handbook of deposition technologies for films and coatings: science,
technology, and applications. William Andrew, 2nd edition, 1994.
[39] G. D. Severn. A note on the plasma sheath and the Bohm criterion. American
Journal of Physics, 75(1):92–94, 2007.
[40] C. D. Child. Discharge from hot CaO. Physical Review (Series I), 32(5):492, 1911.
[41] T. E. Sheridan and J. A. Goree. Analytic expression for the electric potential in theplasma sheath. IEEE transactions on Plasma Science, 17(6):884–888, 1989.
[42] E. V. Shun’ko. Langmuir probe in theory and practice. Universal-Publishers, 2009.

70
[43] S. Gopikishan, I. Banerjee, and S. K. Mahapatra. Influence of magnetic field onplasma parameters and thin film deposition along axial and radial distances in dcmagnetron. arXiv:1704.06503 [physics.plasm-ph], 2017.
[44] R. W. Shonkwiler and F. Mendivil. Explorations in Monte Carlo Methods. SpringerScience & Business Media, 2009.
[45] T. Motohiro. Applications of Monte Carlo simulation in the analysis of a sputter-deposition process. Journal of Vacuum Science & Technology A: Vacuum, Surfaces,
and Films, 4(2):189–195, 1986.
[46] M. Matsumoto and T. Nishimura. Mersenne twister: a 623-dimensionally equidis-tributed uniform pseudo-random number generator. ACM Transactions on Modeling
and Computer Simulation (TOMACS), 8(1):3–30, 1998.
[47] K. Rummukainen. Monte Carlo simulations in physics. 2008.
[48] Control random number generation – MATLAB rng, MathWorks.https://se.mathworks.com/help/matlab/ref/rng.html, 2019. [Online; accessed March,27, 2019].
[49] A. Bogaerts, E. Bultinck, I. Kolev, L. Schwaederlé, K. Van Aeken, G. Buyle, andD. Depla. Computer modelling of magnetron discharges. Journal of Physics D:
Applied Physics, 42(19):194018, 2009.
[50] E. Shidoji, K. Ness, and T. Makabe. Influence of gas pressure and magnetic fieldupon dc magnetron discharge. Vacuum, 60(3):299–306, 2001.
[51] M. W. Thompson. Ii. the energy spectrum of ejected atoms during the high en-ergy sputtering of gold. The Philosophical Magazine: A Journal of Theoretical
Experimental and Applied Physics, 18(152):377–414, 1968.
[52] P. Sigmund. Theory of sputtering. i. sputtering yield of amorphous and polycrys-talline targets. Physical review, 184(2):383, 1969.
[53] P. Sigmund. Recollections of fifty years with sputtering. Thin Solid Films,520(19):6031–6049, 2012.
[54] M. Stepanova and S. K. Dew. Estimates of differential sputtering yields for deposi-tion applications. Journal of Vacuum Science & Technology A: Vacuum, Surfaces,
and Films, 19(6):2805–2816, 2001.
[55] N. Matsunami, Y. Yamamura, Y. Itikawa, N. Itoh, Y. Kazumata, S. Miyagawa,K. Morita, R. Shimizu, and H. Tawara. Energy dependence of the ion-induced

71
sputtering yields of monatomic solids. Atomic data and nuclear data tables, 31(1):1–80, 1984.
[56] Y. Yamamura and H. Tawara. Energy dependence of ion-induced sputtering yieldsfrom monoatomic solids at normal incidence. Atomic Data and Nuclear Data Tables,62(2):149–253, 1996.
[57] James Ziegler – SRIM & TRIM. http://www.srim.org/, 2013. [Online; accessedMarch, 28, 2019].
[58] R. Behrisch and W. Eckstein. Sputtering by particle bombardment: experiments
and computer calculations from threshold to MeV energies, volume 110. SpringerScience & Business Media, 2007.
[59] S. Mahieu, K. Van Aeken, and D. Depla. Transport of sputtered particles throughthe gas phase. In Reactive Sputter Deposition, pages 199–227. Springer, 2008.
[60] A. M. Myers, J. R. Doyle, J. R. Abelson, and D. N. Ruzic. Monte Carlo simulationsof magnetron sputtering particle transport. Journal of Vacuum Science & Technology
A: Vacuum, Surfaces, and Films, 9(3):614–618, 1991.
[61] A. M. Myers, J. R. Doyle, and D. N. Ruzic. Monte Carlo simulations of sputter atomtransport in low-pressure sputtering: The effects of interaction potential, sputterdistribution, and system geometry. Journal of applied physics, 72(7):3064–3071,1992.
[62] A. Kersch, W. Morokoff, and C. Werner. Selfconsistent simulation of sputterdeposition with the Monte Carlo method. Journal of applied physics, 75(4):2278–2285, 1994.
[63] K. Macàk, P. Macàk, and U. Helmersson. Monte Carlo simulations of the transportof sputtered particles. Computer physics communications, 120(2-3):238–254, 1999.
[64] S. Mahieu, G. Buyle, D. Depla, S. Heirwegh, P. Ghekiere, and R. De Gryse. Montecarlo simulation of the transport of atoms in dc magnetron sputtering. Nuclear
Instruments and Methods in Physics Research Section B: Beam Interactions with
Materials and Atoms, 243(2):313–319, 2006.
[65] D. Depla and W. P. Leroy. Magnetron sputter deposition as visualized by montecarlo modeling. Thin Solid Films, 520(20):6337–6354, 2012.
[66] S. Swann. Film thickness distribution in magnetron sputtering. Vacuum, 38(8-10):791–794, 1988.

72
[67] S. Swann, S. A. Collett, and I. R. Scarlett. Film thickness distribution control withoff-axis circular magnetron sources onto rotating substrate holders: Comparison ofcomputer simulation with practical results. Journal of Vacuum Science & Technology
A: Vacuum, Surfaces, and Films, 8(3):1299–1303, 1990.
[68] C. Z. Jiang, J. Q. Zhu, J. C. Han, P. Lei, and X. B. Yin. Uniform film in largeareas deposited by magnetron sputtering with a small target. Surface and Coatings
Technology, 229:222–225, 2013.
[69] C. Fu, C. Yang, L. Han, and H. Chen. The thickness uniformity of films deposited bymagnetron sputtering with rotation and revolution. Surface and Coatings Technology,200(12-13):3687–3689, 2006.
[70] Y. Zhang, Q. Song, and Z. Sun. Research on thin film thickness uniformity fordeposition of rectangular planar sputtering target. Physics Procedia, 32:903–913,2012.
[71] T. Motohiro. Chapter 4 – Computer Simulation. In K. Wasa, I. Kanno, andH. Kotera, editors, Handbook of Sputtering Technology, pages 143–294. WilliamAndrew Publishing, Oxford, 2nd edition, 2012.
[72] S. D. Ekpe and S. K. Dew. Energy deposition at the substrate in a magnetronsputtering system. In Reactive Sputter Deposition, pages 229–254. Springer, 2008.
[73] V. A. Tupik, V. I. Margolin, and C. T. Su. Consideration of the condensationprocesses of thin films in the crystal substrate’s potential field. In Journal of Physics:
Conference Series, volume 729, page 012025. IOP Publishing, 2016.
[74] V. A. Tupik, V. I. Margolin, and C. T. Su. Modeling of thin films growth processesin the early stage for atoms with covalent bonds. In Journal of Physics: Conference
Series, volume 872, page 012052. IOP Publishing, 2017.
[75] V. A. Tupik, V. I. Margolin, and C. T. Su. Studying of thin film growth and annealingprocesses on early stage by computer simulation. In 2018 IEEE Conference of
Russian Young Researchers in Electrical and Electronic Engineering (EIConRus),pages 433–440. IEEE, 2018.
[76] S. Craig and G. L. Harding. Effects of argon pressure and substrate temperature onthe structure and properties of sputtered copper films. Journal of Vacuum Science
and Technology, 19(2):205–215, 1981.
[77] K. Bordo and H.-G. Rubahn. Effect of deposition rate on structure and surfacemorphology of thin evaporated Al films on dielectrics and semiconductors. Materials
Science, 18(4):313–317, 2012.

73
[78] R. K. Waits. Planar magnetron sputtering. Journal of Vacuum Science and Technol-
ogy, 15(2):179–187, 1978.
[79] A. N. Mladenovic and S. R. Aleksic. Magnetic field calculation of permanentmagnet. In 51-st Internationales Wissenschaftliches Kolloquium, page 9. TechnischeUniversität llmenau, 2006.
[80] M. J. Murphy, D. C. Cameron, M. Z. Karim, and M. S. J. Hashmi. Magnetic fieldsin magnetron sputtering systems. Surface and Coatings Technology, 57(1):1–5,1993.
[81] S. D. Ekpe, F. J. Jimenez, D. J. Field, M. J. Davis, and S. K. Dew. Effect of magneticfield strength on deposition rate and energy flux in a dc magnetron sputteringsystem. Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films,27(6):1275–1280, 2009.
[82] T. E. Sheridan, M. J. Goeckner, and J. Goree. Model of energetic electron transportin magnetron discharges. Journal of Vacuum Science & Technology A: Vacuum,
Surfaces, and Films, 8(1):30–37, 1990.
[83] Q. H. Fan, J. J. Gracio, and L. Q. Zhou. Computer-aided simulation of a rotarysputtering magnetron. Journal of applied physics, 95(11):6017–6020, 2004.
[84] S. M. Borah. Direct current magnetron glow discharge plasma characteristicsstudy for controlled deposition of titanium nitride thin film. Journal of Materials,2013:852859, 2013.
[85] E. Bultinck and A. Bogaerts. The effect of the magnetic field strength on thesheath region of a dc magnetron discharge. Journal of Physics D: Applied Physics,41(20):202007, 2008.
[86] M. J. Druyvesteyn and F. M. Penning. The mechanism of electrical discharges ingases of low pressure. Reviews of Modern Physics, 12(2):87, 1940.
[87] M. J. Goeckner, J. Goree, and T. E. Sheridan. Laser-induced fluorescence character-ization of ions in a magnetron plasma. Journal of Vacuum Science & Technology A:
Vacuum, Surfaces, and Films, 8(6):3920–3924, 1990.
[88] S. M. Rossnagel. Gas density reduction effects in magnetrons. Journal of Vacuum
Science & Technology A: Vacuum, Surfaces, and Films, 6(1):19–24, 1988.
[89] T. Nakano, Y. Saitou, and K. Oya. Transient evolution of the target erosion profileduring magnetron sputtering: Dependence on gas pressure and magnetic configura-tion. Surface and Coatings Technology, 326:436–442, 2017.

74
[90] P. H. William, S. A. Teukolsky, W. T. Vetterling, and B. P. Flannery. Numerical
Recipes: The Art of Scientific Computing. Cambridge University Press, New York,NY, USA, 3rd edition, 2007.
[91] Biagi v7.1 database, LXCat – Plasma Data Exchange Project. http://www.lxcat.net,2019. [Online; accessed January, 25, 2019].
[92] M. Surendra, D. B. Graves, and G. M. Jellum. Self-consistent model of a direct-current glow discharge: Treatment of fast electrons. Physical Review A, 41(2):1112,1990.
[93] G. Murray. Rotation about an arbitrary axis in 3 dimensions. [Online] http://inside.
mines. edu, 2013.
[94] L. R. Peterson and J. E. Allen Jr. Electron impact cross sections for argon. The
Journal of Chemical Physics, 56(12):6068–6076, 1972.
[95] D. Depla, G. Buyle, J. Haemers, and R. De Gryse. Discharge voltage measurementsduring magnetron sputtering. Surface and Coatings Technology, 200(14-15):4329–4338, 2006.
[96] M. J. Goeckner, J. A. Goree, and T. E. Sheridan. Monte Carlo simulation of ions ina magnetron plasma. IEEE transactions on plasma science, 19(2):301–308, 1991.
[97] S. T. Thornton and J. B. Marion. Classical dynamics of particles and systems.Thomson Brooks/Cole, 5th edition, 2004.
[98] J. Sielanko. An alternative method for scattering angle evaluation in Monte Carlosimulation. Radiation effects, 86(5):185–190, 1984.
[99] A. A. Abrahamson. Born–Mayer-type interatomic potential for neutral ground-stateatoms with Z=2 to Z=105. Physical Review, 178(1):76, 1969.
[100] W. D. Westwood. Calculation of deposition rates in diode sputtering systems.Journal of Vacuum Science and Technology, 15(1):1–9, 1978.
[101] Y. M. Altman. Accelerating MATLAB Performance: 1001 tips to speed up MATLAB
programs. Chapman and Hall/CRC, 2014.
[102] Confocal sputtering – angstrom sciences sputtering technology.https://www.angstromsciences.com/confocal-sputtering. [Online; accessedApril, 16, 2019].

75
[103] Introducing the confocal method of magnetron sputtering – AZO materials.https://www.azom.com/article.aspx?ArticleID=9718, 2013. [Online; accessed April,16, 2019].
[104] S. A. Pardo and Y. A. Pardo. Empirical modeling and data analysis for engineers
and applied scientists. Springer, 2016.
[105] Orthogonal arrays (Taguchi designs) – The University of York – Department ofMathematics. https://www.york.ac.uk/depts/maths/tables/orthogonal.htm, 2004.[Online; accessed April, 9, 2019].
[106] I. Ivanov, P. Kazansky, L. Hultman, I. Petrov, and J.-E. Sundgren. Influence of anexternal axial magnetic field on the plasma characteristics and deposition conditionsduring direct current planar magnetron sputtering. Journal of Vacuum Science &
Technology A: Vacuum, Surfaces, and Films, 12(2):314–320, 1994.
[107] P. Yang, C. S. Ren, D. Z. Wang, X. L. Qi, S. H. Guo, and T. C. Ma. Influence ofadditional magnetic field on plasma parameters in magnetron sputtering. Vacuum,83(11):1376–1381, 2009.