Embed Size (px)
Citation preview

Traineeship
Polytecnico di Bari, Italy
Modeling of pulley based CVT systems: Extension of the CMM model with bands-segment
interaction Dct nr: 2007.024
J.F.P.B. Diepstraten
Coach:
Dr. Ing. G. Carbone
Dr. P.A. Veenhuizen
January 2007

2
Contents
Contents....................................................................................................................................................2
Introduction ..............................................................................................................................................3
1. Introduction to CVT systems................................................................................................................5
1.1 Pulley Based Transmission.............................................................................................................5
1.1.1 Metal Pushing V-belt...............................................................................................................6
1.1.2 Metal V-chain ..........................................................................................................................6
2. Existing Models....................................................................................................................................8
2.1 Assumptions ...................................................................................................................................8
2.2 Mechanical Model ..........................................................................................................................8
2.3 Pulley Deformation.........................................................................................................................9
2.4 Momentum Equation .................................................................................................................... 10
2.5 Comparison with other models ..................................................................................................... 11
2.6 Simplified and Dimensionless equations...................................................................................... 13
3. Band Segment Interaction .................................................................................................................. 15
3.1 Assumptions ................................................................................................................................. 15
3.2 Geometrical model ....................................................................................................................... 15
3.3 Continuity Equation...................................................................................................................... 17
3.4 Forces equilibrium........................................................................................................................ 17
3.5 Dimensionless equations .............................................................................................................. 19
3.6 Influence of clearance between the segments ............................................................................... 19
3.7 Parameters .................................................................................................................................... 21
3.8 Driving Pulley .............................................................................................................................. 22
3.9 Driven Pulley................................................................................................................................ 28
3.10 Verify distribution of the kinematical strain............................................................................... 35
4. Future Work ....................................................................................................................................... 40
Conclusions ............................................................................................................................................ 41
Literature list .......................................................................................................................................... 42

3
Introduction
Nowadays the car has become the most used transportation application in the world. From some
estimation there are nowadays almost 1000 millions registered vehicles over our entire planet [Ref: 1],
and this number is still rising. This enormous number of cars has great influence on our environment.
The exhaust gases are filled with toxic gases and particles, like nitrogen oxides and sulphur oxides, and
also not directly poisonous gases like carbon dioxide and vapour. The toxic gases contribute to smog
problems in big cities, and other air pollutions, this leads to all kinds of health problems. Carbon
dioxide has a significant contribution to the greenhouse effect. This extended greenhouse effect leads to
global warming and climate change we are dealing with.
Different solutions are thought of to solve this problem. In the late seventies vehicles became equipped
with catalytic converters, these converters reduce the toxic gases in the vehicle exhaust. Also the
internal combustion engines have been further developed to produce less exhaust gases. These
applications contributed to a decrease of the harmful exhaust gases.
In the last decade also other solutions have been thought of. Some of them exist of replacing the
combustion engine by a fuel cell, or a combination of the combustion engine with a battery, called
hybridization. Another solution is topology change of the drive train. For a few years a sixth gear has
been added to the conventional gear box, this to reduce the rotating speed of the engine at high vehicle
speed to reduce the exhaust gases. One more solution is the use of a continuously variable
transmission, CVT. This transmission is able to provide infinite gear ratios between two constraint
limits, without the use of any clutch to disengage the engine from the drive line. By this property the
combustion engine can be driven in its optimal working point, the engine speed does no longer depend
on the drive line, because this can be freely chosen due the presence of the CVT. This means the
combustion engine always can be used in its working point at which it delivers the most power. A well
chosen engine speed also leads to a minimum of exhaust gases.
This last solution is an interesting one. A CVT can be easily used in place of classical transmission in a
normal car. The drive train must be replaced, but the combustion engine and other energy storage
devices can keep the “old” configuration. So the already used lay out of the car does not have to be
fully changed, as instead is the case of fuel cells or hybrid engines.
Further more it has been estimated that fuel reduction of 10% could be obtained using a CVT in
comparison with a manual shitted gear box [Ref: 2]. This may significantly reduce the above
mentioned environmental problems concerning fossil fuels.
Also the driveability of a vehicle equipped with a CVT is very good. The driver does not have to
change gear, and by doing this lose his attention on the road. Moreover the comfort rises, because the
sudden (de)acceleration during shifting disappears. Torque disengagement will also disappear, because
no clutch is used during normal driving.
The CVT seems a good transmission to place in modern vehicles. But there are still some problems. A
CVT is a complicated transmission and must be controlled by a hydraulic system managed by an
electronic control unit (ECU). This control still must be further optimized and investigated, this is
necessary to obtain the lowest fuel consumption and emission, and highest driveability and comfort. At
this time the control and control strategy are not to be called optimal. The hydraulic clamping forces
determine the transmission’s efficiency and maximum torque that is transmitted. The timing and size of
these hydraulic forces must be further investigated to reach the optimal desired working point.
Another problem is the question wetter the consumer is prepared to buy this new transmission, or not.
Especially in Europe the manual shifted gear box has a big market share, about 80% of all new
produced cars are equipped with manual gear boxes. In Japan the CVT has already a marking share of
20% and the American market is very promising for the CVT [Ref: 3]. But then the question still
remains, will there be enough demand for CVT vehicles?
To be able to determine the behaviour of the CVT transmission different approaches exists, one
mathematical models, multi-body models and FEM models. In this paper the mathematical model,
especially the CMM model, is investigated. The CMM model is derived by Carbone, Mangialardi and
Mantriota from the Polytecnico di Bari, Italy. This mathematical model has been compared with
experiments done at the Technical University of Eindhoven, the Netherlands. This comparison showed
some inequalities between model and experiments. This can be seen in figure 1. In this figure the
geometric speed ratioτ (x-axis) is compared with the clamping force ratio DNDR SS / (y-axis). The fat
line represents the CMM model, the thin lines the results of the experiments.

4
Figure 1: Comparison CMM model and experiments
In this paper a start is made to derive a solution that can cancel these inequalities. The CMM model
will be extended with some equations, in such a way that a better approximations can be made with
respect to the experiments. Because of time limits the exact new model is not derived, but sufficient
equations will be derived to complete the new model.
In the first chapter of this paper a closer look will be taken to different kinds of CVT transmission like
belt CVTs and chain CVTs. In the second chapter the CMM model concerning belt and chain CVTs is
presented and after this in the third chapter the extended version of this model is derived and some
results of this extended version are presented. The last chapter deals with some recommendations about
continuation of the research in such a way that the new model can be derived.

5
1. Introduction to CVT systems
In the first chapter is explained why to use a Continuously Variable Transmission (CVT) as drive train
in a vehicle. In this chapter a brief history will be given, an overview of the commercial applied CVTs
and how they work and its advantages and disadvantages.
Leonardo da Vinci was said to be the first one who thought about a CVT system around 1490. But
when the invention of the car was a fact at the end of the 19th century, CVT became a true issue. The
first CVT patent dates from 1886. The first commercial CVT equipped vehicle was produced in 1958
by DAF (van Doorne Automobiel Fabriek), in the Netherlands, this factory was set up by Hub van
Doorne in 1928. He invented the Variomatic CVT, this is based on a double V-belt system. The
transmission was placed on the rear wheels and the drive train did not contain a differential gear. The
system and the produced car can be seen in figure 1.1
Figure 1.1: Variomatic; layout and produced car
This transmission first could only be used for low-powered cars, 600cc, after some improvements this
raised to 1400cc. About 1,2 million vehicles were equipped with the Variomatic [Ref: 4].
After the launch of the Variomatic different types of CVTs are produced by different companies.
Two different commercial applied CVTs exist, the pulley based CVT and the toroidal CVT. Some
other CVTs exists, but they are only used for research, prototype or at very low scale.
1.1 Pulley Based Transmission The pulley based transmission is the transmission in the above mentioned Variomatic created by DAF.
It consists of two pulleys connected with a V-shaped belt, this kind of CVT is therefore also called the
V-belt CVT. The pulley that is connected to the engine is called the driving or primary pulley, the other
pulley is connected to the wheels and is called the driven or secondary pulley. By changing the axial
position of the moveable sheave of each pulley the pitch radius of the belt is changed and in turn the
transmission ratio is modified, this is shown in figure 1.2.
Figure 1.2: Concept of V-belt CVT’s

6
In the left figure the transmission is in its lowest gear and in the right figure in its highest gear. One
sheave of each pulley is connected with a hydraulic circuit, these controlled sheaves are on the opposite
side of the belt. With the hydraulic circuit the clamping force on each pulley can be varied, by
modifying the clamping force the radius of each pulley can be changed, and so the transmission ratio.
This kind of transmission can provide a speed ratio from 0.4 up to 2 or even higher [Ref: 5].
Two different types of V-belts are used in CVT’s; the metal pushing V-belt and the metal V-chain.
1.1.1 Metal Pushing V-belt The push belt is an enhanced version of the DAF Variomatic. It was invented again by Hub van
Doorne, and it consists of two series of thin metal bands, which hold together a number of wedge-
shaped steel blocks. This belt is manufactured by VDT, Van Doorne Transmission. When the blocks
are compressed, by pushing, they act as one single rigid column, by this it is possible to transmit torque
from one pulley to the other one. In figure 1.3 the construction of a metal pushing V-belt is shown.
Figure 1.3: Construction of metal pushing V-belt
A belt consists of two band-sets with 9 to 12 metal bands. These bands give to the belt its flexibility
and provide the necessary tensile strength. The number of blocks or segments, depending on the length
of the belt, is approximately 400. A segment can have different measures and sizes. A larger block,
which means a larger contact area with the sheave, decreases the contact pressure at higher torque load.
Size and measures of the segments are optimized for its application.
The main failure mechanisms are related to over speeding, misalignment and insufficient lubrication
[Ref: 6].
The metal push V-belt is used as drive train by companies like Fiat, Ford, Subaru and Nissan. It was
also applied in the Formula 1, developed by Williams and VDT. It was a prototype, but the FIA,
Fédération Internationale de l’Automobile, banned the CVT from single-seat racing.
1.1.2 Metal V-chain The metal V-chain CVT transmits the torque through a tension difference between two chain strands.
Links and rocker joint pins are available to transfer the chain tension. In figure 1.4 the metal V-chain
and the layout of this transmission are shown. The chain is a Luk type chain belt, and is applied in the
Audi A6, 2.8L Multitronic.

7
Figure 1.4: Metal V-chain and layout
Instead is the push belt, the chain can only transmit torque by tension in the chain, not with pressure.
The chain consists of a number of chain elements depending on the size of the chain variotor. The main
failure mechanism is fatigue of the link plates, and the elements that contact the sheaves, pin or strut.
The fatigue is mostly due to tension in the belt and a little less to articulation [Ref: 6].

8
2. Existing Models
In chapter 1 it was made clear that for obtaining the right variation of speed ratio, understanding the
behavior of the metal belt CVT is crucial to predict the needed clamping force. In this chapter the
CMM model of the metal belt CVT is presented.
Experiments made clear that two different shifting behaviors of the metal belt CVT exist. The first
mode is the creep mode, this mode is characterized by the fact that the ratio of the clamping force
acting on the primary pulley to that acting on the secondary pulley is mainly influenced by the rate of
change of the speed ratio and by the tangential velocity of the belt.
The slip mode takes place during fast shifting maneuvers and is characterized by the fact that the above
mentioned ratio of the clamping forces is neither influenced by the magnitude of the rate of change of
the speed ratio nor by the tangential velocity of the belt. These characteristics can be shown by using
the CMM model.
This model [Ref: 7], made up by Carbone, Mangialardi and Mantriota, uses kinematical and
geometrical relations and also takes into account the pulley deformation. The model will be compared
with another model, a Multi-Body model.
2.1 Assumptions The model that will be presented is derived by making some assumptions and simplifications.
The metal belt is considered as a continuous body, with locally rigid motion. This means there is no
longitudinal and transversal deformation, i.e. the belt is considered to be an inextensible strip with zero
radial thickness and infinite axial stiffness. Furthermore the bending stiffness of the belt is neglected.
The considered Coulomb friction, with the friction coefficient µ, acting between the segments and the
pulleys, has a constant value. The deformation of the pulley will be described on the basis of Sattler’s
model.
In the derivation of the model second order terms will be neglected.
2.2 Mechanical Model In figure 2.1 the entire CVT variator is shown, the driving (primary) and driven (secondary) pulley are
presented. In figure 2.2 the kinematical and geometrical quantities involved are shown.
Fig 2.1: CVT scheme Fig 2.2: Kinematical en geometrical
quantities involved. (a) planar view,
(b) 3D view
Explanation of the parameters in these figures:
ψ: sliding angle
γ: complementary angle of ψ; ψπγ −=− 2/
θ: angular coordinate

9
r: radial coordinate
ρ: radius curvature
φ: slope angle
τ: tangent unit vector
n: corresponding normal unit vector of τ
er, eθ: radial and circumferential unit vector
vs: sliding velocity and its components r& and srω
β: pulley half-opening angle
βs: pulley half-opening angle in the sliding plane
From figure 2.2 the following geometrical equations can be derived.
( )θ
ϕ∂
∂=
r
r
1tan [2.1]
( )
δθϕ
δcos
rl = [2.2]
( )
∂
∂−=
θ
ϕϕ
ρ1
cos1
r [2.3]
( ) ( ) ( )ψββ costantan =s [2.4]
( )ψω tanrr s&=⋅ [2.5]
With:
ωs: local sliding angular velocity of the belt; ωω −Ω=s
Ω: local angular velocity of the belt
ω: pulley rotating velocity
δl: length of a material element of the belt
δθ: angular extension of the same material element
After taking the material time derivative of equation [2.2], this becomes:
( ) θθ
ϕϕ ∂∂
++=∂∂ Dt
D
r
rl
Dt
D
l
1tan
1&
& [2.6]
Neglecting elongation of the belt, variation of the pulley rotating velocity in tangential direction and
the slope angleϕ , the continuity equation of the belt can be written into:
0=∂
∂+
θ
ωs
r
r& [2.7]
2.3 Pulley Deformation To calculate the actually path of the belt (the radial position of the belt), transversal deformation and
pulley deformation must be known. Experiments made clear that belt transversal deformation does not
contribute to radial differentiation in the position of the belt. On the contrary, pulley deformation can
vary the radial position of the belt between 0.1 to 1 mm. So belt transversal deformation is neglected
and only pulley deformation is taken into account [Ref: 7]. In figure 2.3 the pulley deformation is
shown.

10
Figure 2.3: Pulley deformation
The actually pulley deformation is described by the using the Sattler’s Formulas. They describe the
varying groove angle β and the axial displacement u of the pulley.
+−
∆+=
2sin
20
πθθββ c [2.8]
( )0tan2 ββ −⋅⋅= Ru [2.9]
With:
0β : groove angle in undeformed situation
∆ ≈ 10-3: amplitude of the sinusoid
cθ : center of the wedge expansion
R: pitch radius of the belt, the distance from the pulley axis that the belt would have if the
pulley sheaves were rigid.
The local radial position can be calculated by:
2
tantan 0
uRr −⋅=⋅ ββ [2.10]
Taking the time derivative of the above equation the radial velocity can be calculated.
( )cr Radt
dRv θθω −∆+= sin [2.11]
where ( ) ( )00
2 2sin/cos1 ββ+=a
2.4 Momentum Equation The equilibrium of the belt involves the tension of the belt (F), the linear pressure acting on the belt
sides ( p ), the friction force (af ), and inertia, centrifugal, force of the belt element (
2)( R⋅ωσ ). This
is visualized in figure 2.4. The friction force pfa ⋅= µ

11
Figure 2.4: Forces acting on belt
σ = mass density
F = T – P ; the net tension of the belt
T: tension of the band
P: compressive forces between metal segments
A number of assumptions are made to calculate the equilibrium. At first it is possible to calculate the
local angular acceleration θ& of the considered belt’s material element with the pulley’s angular
velocity ω. Secondly from equation [2.3] follows Rr ≈≈ρ , therefore all these three parameters are
written as R. Thirdly the term R&& is neglected with respect to R2ω , i.e. 12
<<R
R
ω
&&, furthermore also
1<<ϕ . The last assumption is that the belt’s axial and tangential acceleration can be neglected [Ref:
8]. With these assumptions, the two involved equations are:
( )
ψβµβ
ψβµ
θ
ωσ
ωσ coscossin
sincos1
0
22
22 ⋅⋅−
⋅⋅=
∂
⋅⋅−∂
⋅⋅− s
sRF
RF [2.12]
( )ψββ
ωσ
coscossin2 0
22
⋅−
⋅⋅−=
sR
RFp [2.13]
With this last equation it is possible to calculate the center of the wedge expansion cθ as:
( ) ( )
( ) ( )∫
∫=
α
α
θθθ
θθθ
θ
o
oc
dp
dp
cos
sin
tan [2.14]
2.5 Comparison with other models The determined CMM model will be compared with another model, this is a Multi-Body model derived
by Srnik and Pfeiffer [Ref: 9]. The results are obtained during steady-state behaviour, in the CMM
model this means the parameter A from equation [2.25] has the value zero. Furthermore the wrap angle
is 180° and the groove angle β0= 10°. In the figures below, figure 2.5 and 2.6, the results are shown for
the driving and driven pulley.
The driving pulley has a ξ value of 0.35 and the driven pulley a value of 1/0.35. ξ represents a ratio
between the force at the exit and at the entrance of the pulley, see equation [2.33]. In the figures the

12
relation between sliding angle γ and angular coordinate α is presented; here is 2/πψγ −= . In the
driving pulley the angular coordinate α is given as 2/, πθα += DRDriveI and in the driven pulley as
2/, πθα −= DNDrivenI .
Figure 2.5: Result driving pulley Figure 2.6: Result driven pulley
a) Multi-Body
b) CMM
---) flexible pulley
) rigid pulley
From these figures can be concluded that the CMM model and the Multi-body produce almost similar
behaviour, this is off course good. Also must be concluded that pulley deformation has a large
influence on the sliding angle.
In figure 2.7 the tensile forces on one chain link are shown during one revolution, and in figure 2.8 the
normal forces are presented. The calculation is done under the above mentioned condition. The friction
coefficient µ has a value 0.1, and ξ has a value 0.35. Furthermore the minimal tension force in the belt
is 1.6 kN.
Figure 2.7: Tensile forces Figure 2.8: Normal forces
a) Multi-Body
b) CMM
The agreement is quite good between both models. Some differences exist in the normal forces at the
driving pulley, but it is only a small error.

13
So the CMM model is a good model to describe the behaviour of a CVT, and can be used to understand
its performance.
2.6 Simplified and Dimensionless equations To be able to calculate the force acting on the belt and the pulley pressure the equations have to be
rewritten into dimensionless equations. These equations will be needed in the next chapter.
To simplify equations [2.1 and 2.7], consider 1<<ϕ . The equations become:
θ
ϕ∂
∂=
r
r
1 [2.15]
0=∂
∂+
θθv
vr [2.16]
All the previously derived relations can be rephrased in dimensionless form, using the following
dimensionless quantities:
R
Rw
ω
&= [2.17]
( )
0
2
0
cos1
2sin
β
β
+∆=
wA [2.18]
( )
0
2
0
cos1
2sin1~
β
β
ω +∆=
r
rvr
& [2.19]
( )
0
2
0
cos1
2sin1~
β
β
ω
ωθ
+∆= sv [2.20]
22
0
22
RF
RF
σω
σωκ
−
−= [2.21]
22
0
~
RF
Rpp
σω−
⋅= [2.22]
In equation [2.28] F0 is the tension force of the belt at the entry point of the pulley, 0=θ . Equation
[2.5] can be written into:
( )rv
v~
~tan θψ = [2.23]
And [2.23] means:
0~
~ =+δθ
δ θvvr [2.24]
From equation [2.11] can be concluded that:
+−−=
2cos~ π
θθ cr Av [2.25]
Equation [2.12, 2.13 and 2.14] can be written into:
ψµψββ
ψµ
θ
κ
κ coscostan1sin
sin1
2
0
2
0 −+
⋅=
∂
∂ [2.26]
2coscostan1sin
costan1~2
0
2
0
2
0
2κ
ψµψββ
ψβ
−+
+=p [2.27]

14
( )
( )∫
∫
∂⋅
∂⋅
=α
α
θθ
θθ
θ
0
0
cos~
sin~
tan
p
p
c [2.28]
Combining [2.24 and 2.25] result in:
−
−−= cAvv θ
θθθθθ
2sin
2sin2~~
0 [2.29]
Equation [2.23] can be written into:
+−−
−
−−
=
2cos
2sin
2sin2~
tan0
πθθ
θθθ
θ
ψθ
c
c
A
Av
[2.30]
To solve these set of equation the following boundary conditions exist:
00
~~θθθ vv =
= [2.31]
10
==θ
κ [2.32]
22
1
22
2
RF
RF
σω
σωξ
−
−= [2.33]
The last parameter ξ is the ratio between the belt tension force at the exit and the entry point of the
pulley.
With a given parameters A and ξ the other parameters can be calculated.
15
3. Band Segment Interaction
As stated in the introduction the presented CMM model from chapter 2 showed some inequalities with
performed experiments. In this chapter a possible solution will be given to deal with these inequalities.
The idea is that band segments interaction can be the solution, this kind of interaction is not taken into
account in the standard CMM model. In this chapter an approximation will be presented to handle this
phenomenon.
As stated before the belt consists of two types of components, the bands and the segments. On the
contact face the difference between the velocity of the bands and the segments will play a significant
role, so this velocity should be derived.
After this the tension of the bands will be further analyzed, the tension is influenced by the above
mentioned velocity. The obtained equations will be added to the CMM model from chapter 2, and
some results will be presented.
3.1 Assumptions Besides the assumptions in the last chapter, other assumptions are considered to derive the equations.
The segments and the bands can slide with respect to each other, i.e. they can have different velocities.
At the contact face between the segments and the bands a Coulomb friction is considered with a
constant friction coefficient. Also we will follow the commonly adopted theory in of elastic beams that
the cross section of the bands and the segments remains plane during motion.
The bands have a tension force T and the segments have pressure force P working on it, in such a way
that the total force F acting on the belt is equal to PTF −= .
The last assumption is that the segments can be separated from each other, this phenomenon will be
further explained in this chapter.
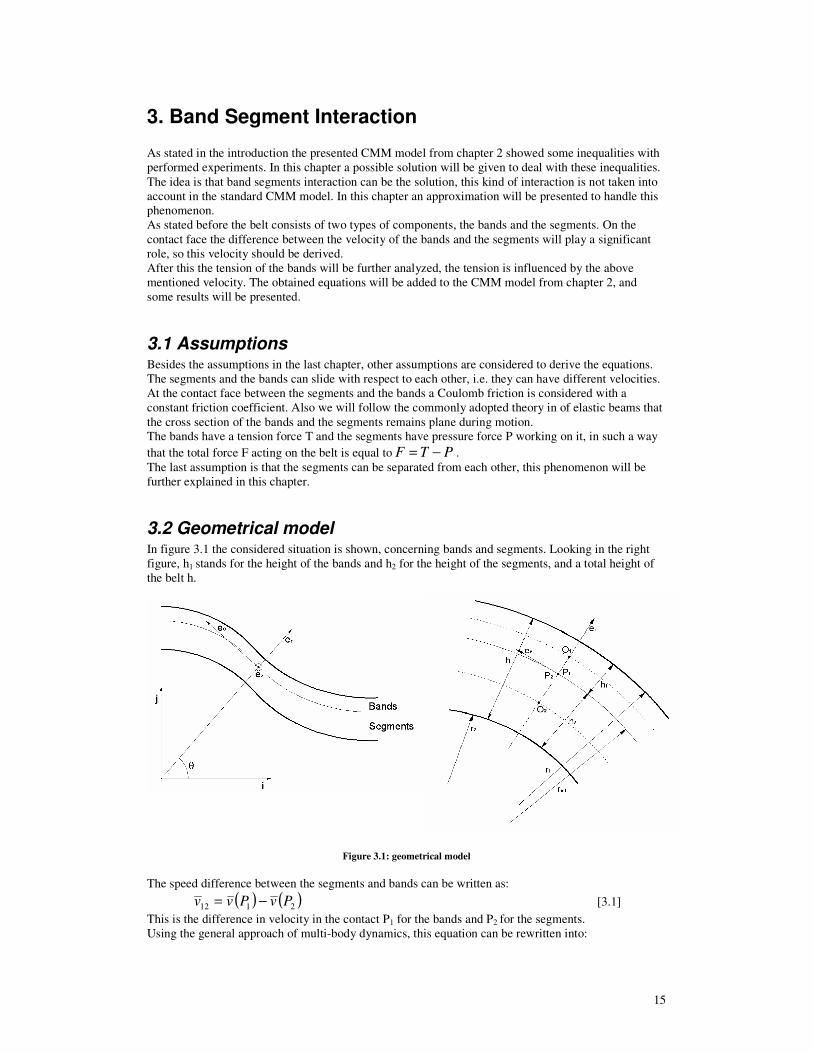
3.2 Geometrical model In figure 3.1 the considered situation is shown, concerning bands and segments. Looking in the right
figure, h1 stands for the height of the bands and h2 for the height of the segments, and a total height of
the belt h.
Figure 3.1: geometrical model
The speed difference between the segments and bands can be written as:
( ) ( )2112 PvPvv −= [3.1]
This is the difference in velocity in the contact P1 for the bands and P2 for the segments.
Using the general approach of multi-body dynamics, this equation can be rewritten into:

16
( ) ( ) θθ ωω ehehOvOvv ZZ
rr22112112 −−−= [3.2]
In this equation ( )iOv is the velocity of the bands or the segments in the point iO . The angular
velocity izω is the angular velocity measured from point Pi, where i stands for 1 representing the bands
and for 2 in case of representing the segments.
The velocity can also be phrased as follow,
( )ii rOv &= [3.3]
Remembering that rii errr
= . Using this, the derivation can be made, which leads to:
( ) θθθ ωωθθ
ehheuerr
v ZZr
rrr2211
22
1112 +−+
∂
∂Ω−
∂
∂Ω= [3.4]
In this equation holds 2211 rru Ω−Ω=θ .
Now taking a more specific look to the term izω . In figure 3.2 this parameter is visualized, αω &=Z1 .
Figure 3.2: Explanation of angles and iZω
From the figure can be made up that:
ϕθα −= [3.5]
This means ϕϕθω &&& −Ω=−= 11Z .
The terms θ∂
∂ ircan be taken together. From figure 3.1 follows:
( )1int1 hrr += [3.5]
( )2int2 hrr −= [3.6]
This means thatθθθ ∂
∂=
∂
∂=
∂
∂ rrr 21.
When the above obtained results are substituted in equation [3.4], it gives:
( ) θθ ϕθ
ehewer
v r
r&
rr++
∂
∂Ω−Ω= 2112 [3.7]
With ( )21int Ω−Ω= rw .
The first term on the right hand side of equation [3.7] is a second order term, 1<<−Ω
ω
ωi, and is
therefore neglected.

17
To calculate ϕ& equation [3.22] is used, remembering thatθ
ϕϕ
∂
∂Ω=& . Second order terms are again
neglected. Substituting this result, leads to:
θθθ
er
R
hewv
rr
2
2
12∂
∂Ω⋅+= [3.8]
The term 2
2
θ∂
∂ rcan be calculated by using equation [2.12]. Using the parameter
)2sin(
cos1
0
0
2
β
β+=a
results in the following equation:
( )[ ] θθθ ehawv c
r−⋅∆⋅Ω⋅⋅+= cos12 [3.9]
3.3 Continuity Equation The continuity equation for both the bands and segments becomes:
0=∂
Ω∂+
θi
ii rr& [3.10]
Now the continuity equation of the segments is subtracted from the continuity equation of the bands.
Consider that θ∂
∂Ω+
∂
∂= i
ii
i
r
t
rr& and that 021 =
∂
∂−
∂
∂
t
r
t
r.
( )
02211 =∂
Ω−Ω∂
θ
rr [3.11]
From this equation it can be concluded that ( )2211 Ω−Ω rr is constant along the arc.
Parameter w can be rephrased into:
( ) ( )212211 hhrrw +Ω−Ω−Ω= [3.12]
Equation [3.12] can also be rewritten into:
( ) ( )
θθθ ∂
Ω∂+−
∂
Ω−Ω∂=
∂
∂21
2211 hhrrw
[3.13]
Because ( )
02211 =∂
Ω−Ω∂
θ
rrand the second order term ( )
θ∂
Ω∂+ 21 hh can be neglected, 1<<
R
h,
the conclusion can be drawn that w is constant along the arc.
3.4 Forces equilibrium A more specific look will be given to the Coulomb friction forces between the belt and the segments. In
figure 3.3 a visualization of the situation is shown. Five forces acting on the belt are considered: two
tension forces on both ends of the section, a normal force and a friction force between the band and the
segments, and a mass inertia force (centrifugal force).

18
Figure 3.3: Visualization of forces on one infinitesimal section dθ of the CVT belt
An assumption is that the belt tension T, is directed in the tangential direction, this means there is no
angle between tension and θer
direction.
R: radius of the belt
T: belt tension
NdF : normal force between band and segments = δθ⋅⋅RPb
with Pb: pressure between band and segments
µdF : friction force between band and segments = δθ⋅⋅⋅=⋅ RPfdFf bN
=f( friction coefficient )
indF : inertia force of the considered band section = δθωσ ⋅⋅⋅⋅ RRb
2
When the equilibrium of the five existing forces is written down the following equation is obtained:
( ) ( ) 0=⋅+−+−+ rinrNd
edFedFedFeTeTrrrrr
θµθθθθθ [3.14]
The first two terms can be combined into one term:
( ) ( ) ( )θ
θθ
θθθθθ ∂∂
∂=−
+
eTeTeT
d
rrr
[3.15]
Equation [3.14] can be written in the tangential direction, θer
, and in the radial direction, rer
, doing this
gives:
0=⋅⋅−∂
∂RPf
Tb
θ [3.16]
022 =⋅⋅+⋅+− RRPT bb ωσ [3.17]
From equation [3.17] follows22
RTRP bb ⋅⋅−=⋅ ωσ . This is substituted in equation [3.16].
( )22RTf
Tb ⋅⋅−⋅=
∂
∂ωσ
θ [3.18]
Using this differential equation the tension of the band can be calculated.
The derivative of tension in the belt is determined by the direction of12v . When
12v is positive, the
θ∂
∂T is positive, and the other way around, when
12v is negative, then θ∂
∂Tis negative. In figure 3.4 a
possible situation that can occur is visualized.

19
Figure 3.4: Possible situation for values of
12v
In the situation above, at two positions the velocity difference between segments and bands,12v , is
zero. This means on two positions the θ∂
∂T will change of direction. The two other possible situations
are when only one point or no point of zero velocity difference exists. Also in these situations the
change of tension is determined by the direction of12v .
3.5 Dimensionless equations To make the equations more understandable the following dimensionless quantities are used.
∆
=ωah
vv 12
12~
[3.19]
∆
=ωah
ww~ [3.20]
22
1
22
RF
RT bbbbb
σω
ωσκ
−
−= [3.21]
With these quantities equation [3.9] is written as:
( )cwv θθ −+= cos~~12
[3.22]
The quotient between the tension in the band at the input and at the output of the pulley is defined as:
22
1
22
2
bbb
bbbb
RT
RT
ωσ
ωσξ
−
−= [3.23]
And equations [3.18] can be rewritten into:
bb f κ
θ
κ⋅=
∂
∂ [3.24]
The segments pressure becomes:
22
1
~
RF
PP
σω−= [3.25]
3.6 Influence of clearance between the segments To calculate the tension at the belt, and pressure on the segments, the model must be expanded with the
influence of clearance between the segments. This subject is investigated in (Ref: 10).
The contact arc exists of two parts, a section where the segments are separated from each other, and
one where the segments are pushed together.
Considering the driving pulley, the above first mentioned section is the first section on the pulley, see
figure 3.5, so here the segments are separated. In this part the only force acting on the belt is the tension
in the bands, caused by the band segment interaction. To calculate this tension equation [3.24] is used.
In the second section the segments are packed together. Two forces exists, the tension in the bands and

20
because the segments are pushed on each other, the pressure on the segments. The total force
becomes PTF −= . Because the total force can be calculated by equation [2.26] and the tension is
known by equation [3.24], also the segments pressure can be calculated.
Figure 3.5: Influence of clearance on driving pulley
At the shock section, at angular coordinate*θ , the segments will collide and come in contact, after this,
a pressure occurs between the segments. The shock section separates the two mentioned phases. The
sliding velocity at the shock section consists of two quantities, one calculated from the kinematical
strain and the other the tangential component of the sliding velocity at*θ . The first component is
calculated by (Ref: 10):
*
**
1 DR
DRDRs
ε
ε
+
−= [3.26]
Withε the kinematical strain of the belt,da
db=ε , db is the distance between two segments and
da is the thickness of one segment. The tangential sliding velocity is calculated with ( ) ( )ψθ tan~ * ⋅rv .
So the sliding velocity at the shock section becomes:
( ) ( ) ( )ψθ
β
βθ tan~
cos1
2sin1~ *
0
2
0*
0 ⋅++
⋅∆
⋅= rDR vsv [3.27]
The pressure at the shock section*P , can be calculated by the following equation (Ref: 10):
( ) 22*** 1 RssP DRDRDR σω⋅+−= [3.28]
When considering the driven pulley, the sections have changed place, as is shown in figure 3.6. In the
first section the segments are packed on each other and in the second section the segments are
separated. The equations used on the driving pulley on each section hold true for the corresponding
section on the driven pulley.

21
Figure 3.6: Influence of clearance on driven pulley
For both pulley holds that in the section where the segments are separated, the total force is equal to the
tension in the bands, therefore can be written from equation [2.26 and 3.24] that in this section holds
true that:
ψµψββ
ψµµ
coscostan1sin
sin
2
0
2
0 SP
SPBS
−+
⋅= [3.29]
With BSµ the friction coefficient between the bands and the segments and SPµ the friction coefficient
between the segments and the pulley. Using the following values the sliding angle ψ can be
calculated. 05.0=BSµ , 09.0=SPµ , deg100 =β . The result can be seen in figure 3.7.
0 1 2 3 4 5 6 7-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
psi
Equilibrium k = kb
k
kb
Figure 3.7: Calculation of sliding angle ψψψψ
As can be seen in figure 3.7 two solutions exist for the sliding angle. 0481.01 =ψ and 9937.22 =ψ .
Remembering that with
rv
v~
~tan θψ = the right solution can be picked: the distinguishing must be made
between the driving pulley and the driven pulley. At the driving pulley the section of separated
segments is placed at the entrance of the pulley, in this part the sliding velocity is pointed inwards, so
the sliding angle must be around π. This is the case for2ψ .
At the driven pulley the considered section is placed at the exit of the pulley, the sliding velocity is here
pointed outwards, so the sliding angle must be around 0. This is the case for1ψ . So now the sliding
angle is known in the section where the segments are separated for both pulleys.
3.7 Parameters The calculations are done with the following values of the parameters: πα = rad,
0=A , 05.0=BSµ , 09.0=SPµ , deg100 =β , 2000=ω rpm, 001.0=∆ , 2.1=σ kg/m,
432.0=bσ kg/m, 0540.0=R m, 12=h mm.
Because the driving pulley needs different input parameters to do the calculation than the driven pulley,
the distinguishing is now made between the two pulleys.

22
3.8 Driving Pulley
To do the calculation on the driving pulley three input parameters are needed, these are w~ , the
dimensionless representation of the difference in angular velocity between bands and segments, *θ the
angular coordinate on which the segments come in contact and*ε the kinematical strain in this point.
With given values of these parameters the calculation can be done. The assumption is, as stated before,
that at the entrance the segments are separated and at position*θ the segments are pushed together. By
the use of equation [3.22 and 3.24] the dimensionless tension in the bands can be computed. Because
the kinematical strain at *θ is given,
*ε , the other parameters,*P and 0θv can be calculated. With the
help from equation [3.28] *P , the pressure between the segments in this point, is known, and from
equation [3.27] 0θv can be calculated. From these parameters the dimensionless total force on the belt,
the sliding angle, the pulley pressure and cθ can be calculated in the same way as presented in chapter
2.
To study in which way the different input parameters influence the results of the calculation the
following is done. Two input parameters are fixed at one value, the third parameter is varied in five
different values with equal increasing step size. In this was the influence of this parameter is studied.
The only input parameter that significantly influences the behaviour of the tension in the bands is w~ .
Suitable values for w~ can be approximate from equation [3.22] with setting 12v to zero and an
estimation of cθ . In figure 3.7 the behaviour of bκ is shown for different values of w~ , variation from
1~ −=w up to 6293.0~ =w .
0 0.5 1 1.5 2 2.5 3 3.50.85
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
Angular coordinate θ [rad]
κb [-]
Dimensionless Tension
wmin = -1
w2
w3
w4
wmax = 0.6293
Figure 3.7: Behaviour for dimensionless tension a varying w~
In case of 1~ −=w the tension is decreasing constantly along the contact arc. In the second case, 2~w ,
two point exists where 12v is zero, the tension is first decreasing, then increasing and at the end for a
second time decreasing. In the last three cases, one point at which 12v is zero exists. First there is a
decreasing tension, and after this an increasing tension. Variation of w~ can therefore cause a rise or a
drop of tension at the exit point of the pulley with respect to the tension at the entrance point.

23
To calculate the other quantities the other two input parameters are fixed, 0025.0* =ε and o70* =θ .
The results are given in figure 3.8, 3.9 and 3.10.
0 0.5 1 1.5 2 2.5 3 3.50
0.2
0.4
0.6
0.8
1
1.2
1.4Dimensionless forces on the belt
Angular coordinate θ [rad]
Fo
rce
s [-]
wmin
= -1
w2
w3
w4
wmax
= 0.6293
Figure 3.8: Dimensionless forces with varying w~
0 0.5 1 1.5 2 2.5 3 3.52.5
3
3.5
4
4.5
5
5.5
6
Angular coordinate θ [rad]
Ψ [ra
d]
Sliding angle
wmin
= -1
w2
w3
w4
wmax
= 0.6293
Figure 3.9: Sliding angle with varying w~

24
0 0.5 1 1.5 2 2.5 3 3.51.5
2
2.5
3
3.5
4Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
wmin
= -1
w2
w3
w4
wmax
= 0.6293
Figure 3.10: Pulley pressure with varying w~
In figure 3.8 the fat solid lines represent the total force, the thin solid lines the tension and the fat dotted
lines the segments pressure. As can be seen in this figure a segments pressure occurs at *θ . From this
point on the sliding angles rises, causing the total force to decrease, and the segments pressure to
increases.
The sliding angle has expected behaviour; until *θ a constant sliding angle calculated from equation
[3.29], and after this point a big increase until cθ . The small difference is due a different cθ , caused by
a different tension at *θ .
The pulley pressure has also expected behaviour, a more or less constant value until *θ , and after this a
great enhancement until cθ . The difference is the consequence of different cθ and a different values of
the total force, caused by different w~ .
Variation of*ε does not significantly change the behaviour of the tension, the small difference is
caused by a minor difference in cθ . The variation of *ε has the largest influence on 0θv , which
determines an increase or decrease of the total force, *ε is varied from 0.0018 up to 0.0030. The other
two input parameters are fixed at 4905.0~ −=w and o70
* =θ . The results are shown in figure 3.11, 3.12
and 3.13.

25
0 0.5 1 1.5 2 2.5 3 3.5-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Dimensionless forces on the belt
Angular coordinate θ [rad]
Forc
es [-]
ε*min
= 0.0018
ε* 2
ε* 3
ε* 4
ε*max
= 0.0030
Figure 3.11: Dimensionless forces with varying*ε
0 0.5 1 1.5 2 2.5 3 3.50
1
2
3
4
5
6
7 Sliding angle
Angular coordinate θ [rad]
Ψ [ra
d]
ε*min
= 0.0018
ε* 2
ε* 3
ε* 4
ε*max
= 0.0030
Figure 3.12: Sliding angle with varying*ε

26
0 0.5 1 1.5 2 2.5 3 3.51
2
3
4
5
6
7
8
9Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
ε*min
= 0.0018
ε* 2
ε* 3
ε* 4
ε*max
= 0.0030
Figure 3.13: Pulley pressure with varying*ε
In figure 3.11 the same lines represent the same forces as in figure 3.8. In the first case *ε has a very
small value. This causes small values of*P and 0θv . This causes a decrease of the sliding angle, and
therefore a rise of the total force, because of this the segments pressure decreases below zero. This
means the pressure between the segments is first positive, but then becomes negative, with other words,
the segments are after *θ first in contact, but further along the arc the segments are separated again.
This means the pulley is no longer a driving pulley, but a driven pulley. Remember that the segments
pressure cannot be negative, and therefore the presented solution is not correct.
The second case is a remarkable situation. In the same way as mentioned above the segments pressure
drops below zero, but further along the arc the total force decreases and the segments pressure is again
positive. This would mean that the segments first are in contact, become separated, and than again
come in contact. This would mean the pulley could be a driving pulley. Because the presented solution
is not exactly correct, an additional research would be needed to examine this situation, to investigate if
this kind of behaviour can occur.
The last three cases have logically, expected solutions. The sliding velocity at *θ is far enough below
zero to cause a rise of the sliding angle after *θ , wherefore the total force decreases and the segments
pressure increases, the solutions are also affect by a different cθ .
The solutions for the pulley pressure concerning these last three cases are correct and expected. Almost
constant up to *θ , and after this an increase, and then becomes smaller because the total force becomes
smaller. The other two solutions are not correct, because the total force distribution is not correct since
the pressure cannot be below zero.
The third parameter *θ also does not significantly influence the behaviour of the tension distribution.
The difference is again caused by a different cθ . The parameter *θ determines the size of the arc where
the segments are in contact and by this influences whether the total force increases or decreases. The
variation of *θ is from 60° up to 80°, chosen on the hand of experimental data. The other input
parameters are set to 4905.0~ −=w and 0025.0* =ε . The results are presented in figure 3.14, 3.15 and
3.16.

27
0 0.5 1 1.5 2 2.5 3 3.5-0.5
0
0.5
1
1.5Dimensionless forces on the belt
Angular coordinate θ [rad]
Forc
es [-]
θ* = 60°
θ* = 65°
θ* = 70°
θ* = 85°
θ* = 80°
Figure 3.14: Dimensionless forces with varying
*θ
0 0.5 1 1.5 2 2.5 3 3.50
1
2
3
4
5
6
7 Sliding angle
Angular coordinate θ [rad]
Ψ [ra
d]
θ* = 60°
θ* = 65°
θ* = 70°
θ* = 85°
θ* = 80°
Figure 3.15: Sliding angle with varying
*θ

28
0 0.5 1 1.5 2 2.5 3 3.51
2
3
4
5
6
7
8
9Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
θ* = 60°
θ* = 65°
θ* = 70°
θ* = 85°
θ* = 80°
Figure 3.16: Pulley pressure with varying
*θ
In the first case the sliding angle decreases, causing a rise of the total force. After *θ the segments
pressure is positive, but when the total force increases, the pressure between the segments becomes
negative, which is physically not acceptable as in agreement with the case mentioned at varying*ε .
Therefore this presented solution is not correct
In the second case, in the first stadium the same occurs as in the first case. The segments pressure is
below zero, but the sliding angle rises, and the total force decreases even this far that the segments
pressure is positive again. This would mean that the segment are first in contact, then separated and at
the end once more come in contact. This is in agreement with the situation mentioned above at
varying*ε . Because the presented solution is not correctly determined, this situation must be further
studied to draw correct conclusions.
The last tree cases are correct and show expected behaviour. An increase of the sliding angle causes a
drop of the total force and a rise of the segments pressure. In these three cases the pulley pressure is as
expected, constant up to *θ , and after this an increase followed by a decrease, which is caused by a
decreasing total force.
3.9 Driven Pulley
The calculation on the driven pulley also needs three input parameters, these are w~ , the dimensionless
representation of the difference in angular velocity between bands and segments, 1
~P , the pressure
between the segments at the entrance of the pulley and 0θv at the entrance point.
With given values of these parameters the calculation can be done. As mentioned before, at the
entrance of the pulley the segments are packed together, on a certain position, *θ , they will be
separated. First the tension and the total force distribution along the contact arc are computed,
equations [2.26, 3.22 and 3.24] At the angular position when these two quantities are equal, the
segments are separated because the segments pressure equals zero, FTP −= , this position is *θ .
Hence, before *θ there is a segments pressure and a tension, after *θ only a tension exists.
To verify the influence of the tree input parameters on the driven pulley the same approach is done as
with the driving pulley. So two input parameters are fixed on a certain value and the third input

29
parameter is varied with equal increasing step size. In this way the influence of this input parameter on
the results of the calculation is studied.
Also for the driven pulley holds that w~ is the only parameters which significantly influence the tension
distribution. The values of w~ are estimated by using equation [3.22], setting 12v to zero and assume a
certaincθ . In figure 3.17 the dimensionless tension distribution on the bands is shown.
0 0.5 1 1.5 2 2.5 3 3.51.6
1.7
1.8
1.9
2
2.1
2.2
Angular coordinate θ [rad]
κb [-]
Dimensionless Tension
wmin = -1
w2
w3
w4
wmax = 0.1736
Figure 3.17: Behaviour of tension with varying w~
As can be seen in the figure above the parameter w~ can cause a higher or a lower tension at the exit
with respect to the tension at the entrance point. In case of 1~ −=w a constant decrease occurs, no point
exists where 012 =v , so a constant decrease takes place. In the second case two points exist
where 012 =v , this means that on two positions the derivative of the tension changes, thus first a
decrease takes place, then an increase and at the exit for a second time a decrease in tension occurs.
The last three cases have one point where 12v is zero, therefore first a decrease takes place followed by
an increase of the tension.
The other results, total force, segments pressure, sliding angle and pulley pressure are presented in
figure 3.18, 3.19 and 3.20. To be able to do the computation the other input parameters are fixed on
0,1~
1 =P and 5870.00 −=θv and the variation of w~ is from -1 up to 0.1736.

30
0 0.5 1 1.5 2 2.5 3 3.5-0.5
0
0.5
1
1.5
2
2.5
Angular coordinate θ [rad]
Forc
es [-]
Dimensionless forces on the belt
wmin
= -1
w2
w3
w4
wmax
= 0.1736
Figure 3.18: Dimensionless forces with varying w~
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
4
Angular coordinate θ [rad]
Ψ [ra
d]
Sliding angle
wmin
= -1
w2
w3
w4
wmax
= 0.1736
Figure 3.19: Sliding angle with varying w~

31
0 0.5 1 1.5 2 2.5 3 3.50
2
4
6
8
10
12
14Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
wmin
= -1
w2
w3
w4
wmax
= 0.1736
Figure 3.20: Pulley pressure with varying w~
In figure 3.18 the fat solid lines represent the total force, the thin solid lines the tension and the fat
dotted lines the pressure between the segments. In this figure can be seen that *θ is positioned at the
end of the contact arc. On this position the segments pressure becomes zero, and the total force is equal
to the tension in the bands. The sliding angle is decreasing until *θ , and the total force is rising,
wherefore the segments pressure is decreasing. After *θ the sliding angle is constant, equal to the value
calculated from equation [3.28]. The pulley pressure has expected behaviour, rising in agreement with
the total force, and more or less constant after *θ .
Variation of 1
~P does not significantly influence the distribution of the tension, only the level is
influenced, with this it determines wetter the segments will be separated or not. The variation is done
with values of 1
~P from 0.40 up to 1.59, and the other input parameters are fixed
on 1865.0~ −=w and 5870.00 −=θv . The results are given in figure 3.21, 3.21 and 3.22.

32
0 0.5 1 1.5 2 2.5 3 3.5-0.5
0
0.5
1
1.5
2
2.5
3
Angular coordinate θ [rad]
Forc
es [-]
Dimensionless forces on the belt
Pmin
= 0.40
P2
P3
P4
Pmax
= 1.59
Figure 3.21: Dimensionless forces with varying 1
~P
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
4
Angular coordinate θ [rad]
Ψ [ra
d]
Sliding angle
Pmin
= 0.40
P2
P3
P4
Pmax
= 1.59
Figure 3.22: Sliding angle with varying 1
~P

33
0 0.5 1 1.5 2 2.5 3 3.50
2
4
6
8
10
12
14Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
Pmin
= 0.40
P2
P3
P4
Pmax
= 1.59
Figure 3.23: Pulley pressure with varying 1
~P
In figure 3.21 the lines represents the same forces as in figure 3.18 As can bee seen in the first three
cases, at a certain *θ the segments pressure becomes zero, from this point on the total force is equal to
the tension in the bands. The sliding angle is decreasing and after separation of the segments the
constant value. The pulley pressure decreases and is almost constant at the end of the contact arc. All
expected results.
For the last two cases the pressure between the segments never becomes zero, this means the segments
are always packed together and never separate, therefore *θ does not exists. The total force is
increasing along the complete arc, the sliding angle is decreasing along the arc and the pulley pressure
is always increasing.
The variation of 0θv does not significantly influence the distribution of the tension, variation of 0θv
determines wetter a separation of the segments takes place or not. 0θv is varied from -1.2 up to 0, the
other input parameters are set to 1865.0~ −=w and 0,1~
1 =P . The results are shown in figure 3.24,
3.25 and 3.26.

34
0 0.5 1 1.5 2 2.5 3 3.5-0.5
0
0.5
1
1.5
2
2.5
Angular coordinate θ [rad]
Forc
es [-]
Dimensionless forces on the belt
vθ0
min
= -1.2
vθ0
2
vθ0
3
vθ0
4
vθ0
max
= 0
Figure 3.24: Dimensionless forces with varying0θv
0 0.5 1 1.5 2 2.5 3 3.50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Angular coordinate θ [rad]
Ψ [ra
d]
Sliding angle
vθ0
min
= -1.2
vθ0
2
vθ0
3
vθ0
4
vθ0
max
= 0
Figure 3.25: Sliding angle with varying 0θv

35
0 0.5 1 1.5 2 2.5 3 3.50
2
4
6
8
10
12
14Dimensionless pulley pressure
Angular coordinate θ [rad]
Pulle
y p
ressure
[-]
vθ0
min
= -1.2
vθ0
2
vθ0
3
vθ0
4
vθ0
max
= 0
Figure 3.26: Pulley pressure with varying0θv
In figure 3.24 the lines represents the same forces as before. In the first two cases, when 0θv has the
largest value below zero, the sliding angle is decreasing the least. As a result the total force is
increasing the least. This leads to a segments pressure which never reaches zero, as a result the
segments are never separated. The sliding angle has no constant value and also the pulley pressure does
not reach a constant value.
In the other three cases the results are as expected, the rise of total force is larger and the pressure
between the segments drops below zero and the segments are separated. In the part after *θ the total
force is equal to the tension, the sliding angle has the constant value and the pulley pressure reaches an
almost constant value.
I final note must be made about the step in the value of the sliding angle and the pulley pressure at the
coordinate were a pressure between the segment occurs. From the continuity equation can made up that
this is not in agreement. The curves should be continuous, this can be done by adjusting ( )0=θψ by
changing 0θv .
3.10 Verify distribution of the kinematical strain The assuming of a *θ , which is previously done, can be verified. It must be ensured that in the contact
area where the segments assumed to be separated, the segments do not come in contact. In other words
for the driving pulley in the part before *θ the value of ε , kinematical strain, must not reach zero. The
expecting behaviour is that the kinematical strain is decreasing from the entrance point up to *θ , this
would imply that the gap between the segments becomes smaller, moving from the entrance to *θ .
For the driven pulley the kinematical strain must not reach a zero value in the part after *θ , the
expected distribution is an increasing value of ε from *θ up to the exit point of the pulley. This would
mean that the gap between the segments becomes larger from *θ to the exit.
To calculate the distribution of the kinematical strain equation [2.6] can be used. This equation must be
rewritten, and becomes the following continuity equation:

36
θ
ω
δθ
εω
ε ∂
∂+=
∂
+s
r
r&
1
1 [3.29]
Because the sliding angleψ in this part of the contact arc is known by equation [3.28], the parameters
r& and sω can be computed with equation [2.23 and 2.25]. Two parameters influence the distribution
of the kinematical strain, these are *θ andcθ . In applying a variation of those two parameters the
distribution is examined.
For the driving pulley the kinematical strain at *θ is known as*ε . With this initial condition the above
equation can be solved. The results are shown in figure 3.27 and 3.28.When varying *θ the value of cθ
is fixed on 120°, and when varying cθ the value of *θ is fixed on 90°.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 22
3
4
5
6
7
8
9
10
11
12x 10
-3 Kinematical strain ε for different θ*
Angular coordinate θ [rad]
Kin
em
atica
l str
ain
ε [-]
θ* = 70°
θ* = 80°
θ* = 90°
θ* = 100°
θ* = 110°
Figure 3.27: Kinematical strain with varying
*θ

37
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.62
3
4
5
6
7
8
9
10
11x 10
-3 Kinematical strain ε for different θc
Angular coordinate θ [rad]
Kin
em
atica
l str
ain
ε [-]
θc = 90°
θc = 100°
θc = 110°
θc = 120°
θc = 130°
Figure 3.28: Kinematical strain with varying
cθ
As can be seen in the above figures the value of ε at coordinate *θ is equal to 0025.0* =ε . The
value of ε is decreasing from the entrance point up to *θ .
Variation in *θ does not influence the slope of ε , but it does influence the level of the distribution. A
variation incθ manipulates the slope of distribution, and by this also in some way the level ε at the
entrance.
With these results it can be sure that there is not a second point in this part of the contact arc where the
segments are packed together.
The driven pulley has an initial condition of 0* =ε at *θ . The distribution of the kinematical strain
on the driven pulley is given in figure 3.29 and 3.30. When varying *θ the value of cθ is fixed on
120°, and when varying cθ the value of *θ is fixed on 150°.

38
2.6 2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.50
0.002
0.004
0.006
0.008
0.01
0.012
0.014
Kinematical strain ε for different θc
Angular coordinate θ [rad]
Kin
em
atica
l str
ain
ε [-]
θc = 100°
θc = 110°
θc = 120°
θc = 130°
θc = 140°
Figure 3.29: Kinematical strain with varying
*θ
2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3 3.1 3.20
0.005
0.01
0.015Kinematical strain ε for different θ*
Angular coordinate θ [rad]
Kin
em
atica
l str
ain
ε [-]
θ* = 130°
θ* = 140°
θ* = 150°
θ* = 160°
θ* = 170°
Figure 3.30: Kinematical strain with varying
cθ
As is shown in these figures the kinematical strain is zero at *θ , the value ofε is increasing from *θ up
to the exit of the pulley.
Variation of *θ manipulates the slope of the distribution and the end level ofε . The variation of cθ
also influences the slope of the distribution and by this the kinematical strain at the exit point of the
driven pulley.

39
This results show that after *θ no point exists where the segments make contact again, the assumption
of *θ is correct.

40
4. Future Work
The CMM model is expanded with the band segment interaction, but it is not completely finished yet.
The tree input parameters needed to do the calculation on each pulley should be eliminated, this can be
done by coupling the two pulleys. Mathematically this must be done using six equations, which can
eliminate the six unknowns; three times two input parameters. For remembering the input parameters
on the driving pulley are: w~ , *
DRε and*
DRθ , on the driven pulley the input parameters are:
w~ , 0θv and 1
~P .
Looking at figure 4.1, five equations can be derived.
Figure 4.1: Equilibrium parameters
In the above figure the following parameters play an important role, F total force, v , the velocity of
the belt, P pressure between the segments. The number one represents the entry point of the pulley and
number two the exit point of the pulley. The character DR represents the driving pulley and the
character DN the driven pulley.
The following equilibrium equations can be derived:
DNDR FF 21 = [4.1]
DNDR vv 21 = [4.2]
DNDR FF 12 = [4.3]
DNDR PP 12 = [4.4]
DNDR vv 12 = [4.5]
Still one equation is needed two solve the problem. The following equation can be used.
L
L
l ∆=∂+∫ 1ε
ε [4.6]
On the left hand of this equation the integral of the kinematical strain on each infinitesimal piece of the
belt, l∂ , is taken, this equals the total clearance of the belt L∆ . This total clearance is the difference of
the length of all segments placed one after each other and the length of the bands.
With the help of these six equations it should be possible to eliminate the six input parameters. In this
way results from this new model can be calculated in the same way as done for the model from chapter
2. With given conditions parameters, physically important parameters like clamping force and torque
on each pulley can be calculated.

41
Conclusions
The continuously variable transmission is a promising transmission for all kinds of drive trains, good
results can be obtained in the field of emissions, efficiency and driveability. The pulley based CVT can
be divided in two categories, the metal push belt and the metal chain. The working principle of those
two CVTs is more or less the same. Other kinds of CVTs exist, but they are not investigated in this
paper.
To be able to reach the optimal in the categories of emissions, efficiency and driveability, more
understanding is needed of the behaviour of the CVT. This can be done by doing experiments and
modelling. In this paper a closer look was taken to a mathematical model of the CVT, the CMM model.
The CMM model is derived by Carbone, Mangialardi and Mantriota from the Polytecnico di Bari,
Italy. After validation of this model, by doing several experiments, some differences seem to appear. A
probable solution seems to be the band segment interaction, which was not taken into account in the
CMM model.
The first step that is taken is the derivation of the equations, concerning band segment interaction.
These equations are related to friction between the bands and the segments, this friction is assumed to
be a Coulomb friction. Because the friction force is determined by the velocity difference between the
bands and the segments, this velocity is derived. To be able to add the band segment interaction to the
model also clearance between the segments has to be taken into account. With this approach it was
possible to modify the CMM model to take into account the band-segments interaction.
The new model has been utilized for a first estimation of the influence of band-segments interaction on
the CVT behaviour. Because of the increased number of degrees of freedom, some extra input
parameters are needed to be able to do the calculation. The first results are promising. Forces on the
belt, tension in the bands and pressure between the segments have been calculated, together with the
pulley pressure and the sliding angle. Also the influence of the input parameters is investigated.
However, the new model is not yet completed. The need of the input parameters should be eliminated
by the use of some extra equations, which make it possible to combine the equations for the two
pulleys and so couple the two pulley into one CVT. These equations are also presented, and so the next
step that has to be taken is to eliminate the need of the extra input parameters by using the extra
equations, and in this way the new CVT model must be completed.

42
Literature list
[1] www.autoblog.nl, Wall Street Journal, April 2006
[2] C. Brace, M. Deacon, N.D. Vaughan, R.W. Horrocks, C.R. Burrows, The compromise in
reducing exhaust emissions and fuel consumption from a diesel CVT powertrain over typical
usage cycles, Proceedings of the CVT’99 Congress, Eindhoven, The Netherlands
[3] B. Vroemen, Continuously Variable Transmission, Course Vehicle Drive Trains, Eindhoven,
The Netherlands
[4] Van der Wal S., De opkomst van het automobilisme in Nederland, University of Maastricht,
April 2003
[5] Harris W., How CVT works, http://auto.howstuffworks.com/cvt.htm
[6] Carbone G., Shifting dynamics in continuously variable transmission, Bari, January 2002
[7] Carbone G., Mangialardi L. and Mantriota G., The influence of pulley deformations on the
shifting mechanism of metal belt CVT, Journal of mechanical design, January 2005
[8] Carbone G., Mangialardi L. and Mantriota G., Theoretical model of metal v-belt driver during
apid ratio changing, Journal of mechanical design, March 2001
[9] Srnik J. and Pfeiffer E., Dynamics of CVT chain drives, Int. J. of vehicle design, vol. 22, 1999
München
[10] Carbone G., Mangialardi L. and Mantriota G., Influence of clearance between plates in metal
pushing v-belt dynamics, Journal of Mechanical Design, September 2002