Embed Size (px)
Citation preview

Trabajo de Fin de Grado
Grado en Ingeniería en Tecnologías Industriales
Modelos virtuales de mecanismos diversos: Modelación, simulación y
análisis mediante SolidWorks
MEMORIA
Autor: Helena Mur Pérez Director: Enrique Ernesto Zayas Figueras Convocatoria: Abril 2021
Escola Tècnica Superior d’Enginyeria Industrial de Barcelona

Pàg. 2 Memoria
Resumen
El presente Trabajo Final de Grado (TFG) tiene el objetivo de crear modelos
virtuales de mecanismos diversos, simular su funcionamiento y realizar un análisis
sencillo de su cinemática para utilizarlos como nuevos recursos didácticos virtuales
en la asignatura de Teoría de Máquinas y Mecanismos (TMM), la cual se imparte en
el segundo año del Grado de Ingeniería en Tecnologías Industriales (GETI) en la
Escola Tècnica Superior d’Enginyeria Industrial de Barcelona (ETSEIB).
En el trabajo, inicialmente, se eligen 6 mecanismos que se modelan y simulan los
cuales son: un sacacorchos de brazos, un flexo articulado de mesa, un tornillo de
banco, un exprimidor eléctrico, una bomba de hinchar de pedal y un gato hidráulico
de patín. Estos mecanismos han sido seleccionados y estudiados siguiendo un
procedimiento común que comienza con la etapa de selección de los mecanismos
siguiendo dos criterios distintos: mecanismos considerados de estructura sencilla y
habitualmente presentes en la vida cotidiana y mecanismos de estructura compleja y
que se consideran de interés mecánico. La segunda y tercera etapa consisten en la
caracterización de los mecanismos y creación de sus modelos virtuales 3D mediante
el programa SolidWorks. A partir de los modelos 3D se realizan las etapas de
esquematización de los mecanismos -mediante el programa Adobe Illustrator, de
animación 3D de los modelos virtuales generados y, por último, su análisis
cinemático mediante el módulo Motion de SolidWorks. En los esquemas de
símbolos se indican las coordenadas de posición y orientación consideradas más
relevantes, así como los parámetros geométricos que definen su geometría y
funcionamiento. A partir de la comprobación del funcionamiento correcto mediante la
animación del mecanismo, se genera y guarda el video de su funcionamiento en
vista bidimensional y tridimensional, recurso que facilita el estudio del mecanismo.
En el trabajo, se aportan como nuevos recursos didácticos para la enseñanza y el
aprendizaje de la materia Teoría de Máquinas y Mecanismo adicionales a los ya
existentes, los modelos virtuales tridimensionales de los seis mecanismos antes
citados y los vídeos que muestran su funcionamiento.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 3
Sumario
SUMARIO ____________________________________________________ 3
1. GLOSARIO _______________________________________________ 5
2. PREFACIO _______________________________________________ 7
2.1. Origen del proyecto ........................................................................................ 8
2.2. Motivación ...................................................................................................... 9
3. INTRODUCCIÓN _________________________________________ 10
3.1. Objetivos del proyecto .................................................................................. 10
3.2. Alcance del proyecto .................................................................................... 10
4. ESTADO DEL ARTE ______________________________________ 12
5. PROCEDIMIENTO DE SELECCIÓN Y MODELACIÓN DE MÁQUINAS
Y MECANISMOS _________________________________________ 15
5.1. Selección del mecanismo a modelar y simular ............................................ 15
5.2. Caracterización del mecanismo elegido ....................................................... 16
5.3. Creación del modelo virtual en 3D ............................................................... 17
5.3.1. Imagen de la escala del instrumento barómetro ............................................. 17
5.3.2. Mecanismo de ruedas dentadas (Engranajes) ................................................... 19
5.3.3. Resortes ............................................................................................................. 22
5.4. Esquematización de los mecanismos que conforman la máquina .............. 23
5.5. Animación 3D del mecanismo o máquina .................................................... 24
5.5.1. Ejemplo de definición de un motor rotario en la especificación del movimiento
de entrada de un mecanismo. ......................................................................... 27
5.5.2. Ejemplo de definición de un motor lineal en la especificación del movimiento de
entrada de un mecanismo............................................................................... 27
5.6. Análisis del movimiento: generación de gráficos cinemáticos ..................... 29
5.6.1. Definición de las características de un muelle................................................. 29
5.6.2. Definición de los pares superiores - Contacto entre sólidos ............................ 30
6. MECANISMOS ELEGIDOS PARA LA MODELACIÓN Y SIMULACIÓN32
6.1. Mecanismos presentes en máquinas o artefactos comunes ....................... 32
6.1.1. Mecanismo Tornillo de banco ......................................................................... 32
6.1.2. Mecanismo Sacacorchos de brazos o forma de T .......................................... 37
6.1.3. Mecanismo Flexo articulado de mesa ............................................................. 42
6.1.4. Mecanismo Bomba de hinchar de pedal ......................................................... 47

Pàg. 4 Memoria
6.1.5. Mecanismo Exprimidor eléctrico ...................................................................... 52
6.1.6. Mecanismo Gato Hidráulico de patín ............................................................... 56
7. COSTES DEL PROYECTO _________________________________ 61
7.1. Tipos de gastos ............................................................................................ 61
7.1.1. Coste del personal ........................................................................................... 61
7.1.2. Coste del material ............................................................................................ 62
7.2. Resumen de costes ..................................................................................... 63
CONCLUSIONES _____________________________________________ 64
AGRADECIMIENTOS __________________________________________ 66
BIBLIOGRAFÍA_______________________________________________ 67
Referencias bibliográficas ..................................................................................... 67

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 5
1. Glosario
PAM: Programa de Análisis y Mecanismos planos de n grados de libertad enfocado
a la docencia universitaria.
TMM: Teoría de Máquinas y Mecanismos.
Toolbox: Librería que incluye más de 1 millón de componentes estándar. Dentro de
dichos componentes se incluyen elementos como pueden ser: tornillos, pernos,
arandelas, rodamientos, engranajes, levas, etc.
DIN: Deutsches Institut für Normung (Instituto Alemán de Normalización).
JIS: Japanese Industrial Standard (Normas Industriales de Japón).
ISO: International Organization for Standardization (Organización Internacional de
Estandarización)
𝒎: módulo de un engranaje es una característica de magnitud que se define como
la relación entre la medida del diámetro primitivo expresado en milímetros y el
número de dientes. Su unidad de medida es el milímetro.
𝒛: número de dientes de las ruedas dentadas.
𝒅𝒂 = 𝒅𝒆𝒙𝒕 = 𝑫: diámetro de la circunferencia exterior o de cabeza del engranaje. Su
unidad de medida es el milímetro.
𝒅𝒊𝒏𝒕: diámetro de la circunferencia interior o del pie del diente. Su unidad de medida
es el milímetro.
gdl: grados de libertad.
gdlGrübler: grados de libertad, aplicando el Criterio de Grübler-Kutzbach.
𝒌: constante elástica de un resorte. Su unidad de medida es el N/m.
G: Módulo de elasticidad torsional. Su unidad de medida es el Pa.
E: Módulo de elasticidad lineal. Su unidad de medida es el Pa.
𝒅: es el diámetro del resorte torsional. Su unidad de medida es el milímetro.
𝑵𝒕: número de espiras totales del resorte torsional.
𝑵𝒂: número de espiras activas del resorte torsional.

Pág. 6 Memoria
𝒑𝒓𝒐𝒔𝒄𝒂𝒔𝒖𝒑: paso de rosca del tornillo superior del mecanismo tornillo de banco. Su
unidad de medida es el milímetro.
𝒑𝒓𝒐𝒔𝒄𝒂𝒊𝒏𝒇: paso de rosca del tornillo inferior del mecanismo tornillo de banco. Su
unidad de medida es el milímetro.
𝝋: ángulo girado. Su unidad de medida es el grado.
𝐬: desplazamiento lineal. Su unidad de medida es el milímetro.
𝒑𝒄𝒓𝒆𝒎: paso de cremallera del mecanismo sacachorcos de brazos. Su unidad de
medida es el milímetro.
𝒑𝒉𝒆𝒍: paso de la hélice del mecanismo sacachorcos de brazos. Su unidad de medida
es el milímetro.
𝒕𝒕𝒐𝒕𝒂𝒍: relación de transmisión total del tren de engranajes.
𝛅: relación unitaria. (Los engranajes, del mecanismo exprimidor eléctrico, tienen el
mismo número de dientes, y los ángulos de los dos conos de paso suman 90º).

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 7
2. Prefacio
Actualmente, teniendo en cuenta las limitaciones que tiene el alumnado ante el
aprendizaje de nuevos conocimientos, como por ejemplo, la enseñanza a distancia
debido al Covid19 y la imposibilidad de ver y tocar maquetas físicas de mecanismos
o de otras piezas u objetos que habitualmente se utilizan como recursos didácticos
en la enseñanza presencial, es de vital importancia encontrar/crear recursos
didácticos con el fin de facilitarles y ofrecerles una opción más dinámica, óptima y de
autoaprendizaje.
La presencia de medios audiovisuales en las aulas ha ayudado de forma
exponencial a entender los contenidos de forma más rápida y eficaz. Es por este
motivo, que el profesorado utiliza con mayor frecuencia este tipo de material,
consiguiendo clases dinámicas y de mayor captación por parte del alumnado. Cierto
es que las imagines comprimen la información, no obstante, la capacidad de
retención del oyente es mucho mayor. Según estudios del profesor Rodríguez
Diéguez [1] se ha extraído la siguiente Tabla 1 en la cual se muestra la importancia
de exponer nuevos contenidos mediante medios o recursos visuales, mediante la
explicación oral.
Tabla 1. Porcentajes de retención del alumnado de los nuevos contenidos explicados [1]
Asimismo, los recursos didácticos ayudan a atraer la atención, gracias a la
combinación de estímulos, repercutiendo en la retención de los contenidos,
aclaración y entendimientos de los conocimientos impartidos. Además, motivan y
mantienen el interés por parte del alumnado.
Es por todo ello que, mediante la creación y la utilización de recursos didácticos
físicos y virtuales, se pretende combinar la sabiduría y la pasión del propio
profesorado con la ayuda al aprendizaje por parte del alumnado que cursa los
grados de perfil técnico industrial en la educación superior.
Este trabajo de fin de grado (TFG) se engloba dentro de la línea de trabajo de título

Pág. 8 Memoria
“Aportación de recursos para la enseñanza y el aprendizaje de la materia Teoría de
Máquinas y Mecanismos” en la que investiga el tutor, Enrique Zayas Figueras, en la
cual se han realizado varios proyectos previos al aquí presentado. Algunos de los
proyectos previos son: “Recursos virtuales de apoyo a la enseñanza y aprendizaje
de Teoría de Máquinas y Mecanismos” [2] y “Recursos didácticos para la enseñanza
y aprendizaje de la asignatura Teoría de Máquinas y Mecanismos: prototipos
virtuales y reales” [3] y “Diseño, Fabricación, Motorización y Control de mecanismos
diversos a utilizar como recursos didácticos en las asignaturas Teoría de Máquinas y
Mecanismos y Proyecto II” [4].
El presente proyecto tiene el objetivo de crear modelos virtuales de mecanismos no
abarcados en los proyectos antes citados; simular su funcionamiento y analizar su
cinemática con el deseo de que puedan servir como nuevos recursos didácticos a
utilizar durante la impartición en el programa docente de la asignatura de Teoría de
Máquinas y Mecanismos que actualmente se imparte en el Grado en Ingeniería de
Tecnologías Industriales (GETI) en la Escola Tècnica Superior de Enginyers
Industrials de Barcelona (ETSEIB).
2.1. Origen del proyecto
El presente proyecto surge de una propuesta que hace el tutor, Enrique Zayas
Figueras del Departamento de Ingeniería Mecánica (DEM) de la ETSEIB, a la autora
ante una solicitud de un tema para el desarrollo de un trabajo de fin de grado (TFG)
y la posibilidad de contribuir con el mismo a la realización de mecanismos virtuales
que sirviesen con recursos didácticos virtuales para la asignatura de Teoría de
Máquinas y Mecanismos (TMM), todo ello haciendo uso del programa SolidWorks,
por lo que no dudé ni un segundo y acepté el reto.
Gracias al presente proyecto, los nuevos alumnos que cursen la asignatura TMM
dispondrían de nuevas herramientas virtuales, adicionales a la ya existentes, para
aprendizaje de la misma y, personalmente, seguiría enriqueciéndome mediante la
utilización de nuevos conocimientos del ámbito del diseño 3D mediante SolidWorks,
ámbito que me apasiona.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 9
2.2. Motivación
La motivación principal del presente proyecto ha sido la posibilidad de crear modelos
virtuales tridimensionales de mecanismos y artefactos, que pueden facilitar al
alumnado de la ETSEIB la comprensión de la estructura y el funcionamiento de
diversos sistemas mecanismos, sobre todo aquellos que comúnmente se estudian
durante el curso de la asignatura de Teoría de Máquinas y Mecanismos. Enrique
Zayas Figueras, como profesor de la asignatura ha sido quien me motivó participar
en dicha iniciativa.
Asimismo, el presente proyecto está marcado por el aprendizaje de aspectos
diversos del ámbito de la ingeniería industrial, como el relativo a elementos
mecanismos como: las uniones atornilladas, las transmisiones por engranajes
cónicos, el uso de los resortes, que habitualmente no se abordan en los estudios de
grado y también se requiere profundizar en el uso del SolidWorks como herramienta
de modelación de dichos elementos, y aplicar la creatividad para la búsqueda de
soluciones en dicho proceso de modelación y de simulación del funcionamiento de
los conjuntos mecánicos (mecanismos), lo que requiere constancia en el trabajo,
dando lugar a la segunda motivación principal, la originalidad de proponer nuevos
modelos virtuales de mecanismos buscados en la práctica común.

Pág. 10 Memoria
3. Introducción
3.1. Objetivos del proyecto
El principal objetivo del presente proyecto es el de crear modelos virtuales de
mecanismos diversos, simular su funcionamiento y analizar su cinemática para
utilizarlos como recursos didácticos en la asignatura de Teoría de Máquinas y
Mecanismos.
A continuación, se enumeran los objetivos específicos del presente proyecto:
Exponer los fundamentos teóricos del uso de recursos virtuales para la
enseñanza.
Realizar un estudio del Estado del arte relacionado con los recursos virtuales
utilizados en la enseñanza de Teoría de Máquinas y Mecanismos en
universidades españolas, es decir, mostrar programas utilizados para la
creación de los modelos y las simulaciones del funcionamiento de
mecanismos y máquinas.
Fundamentar la elección de los mecanismos a modelar y simular, mediante la
descripción de los mecanismos elegidos. Detallar los criterios a tener en
cuenta en la elección de los diferentes mecanismos.
Modelar, simular y analizar los mecanismos escogidos mediante la ayuda de
SolidWorks.
Extraer las conclusiones de los resultados obtenidos con las modelaciones,
simulaciones y análisis realizadas.
Realizar el Coste del Proyecto.
3.2. Alcance del proyecto
El presente proyecto se abarca las cinco etapas siguientes:
1. Elección de los mecanismos a modelar y su caracterización.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 11
2. Modelación en 3D mediante SolidWorks de los distintos sólidos y la creación
de su ensamble.
3. Esquematización de los componentes de los mecanismos, con el fin de
facilitar el entendimiento de la estructura y el funcionamiento de los
mecanismos escogidos.
4. Simulación mediante animaciones el funcionamiento de los mecanismos y
generar los videos utilizando el módulo Motion de SolidWorks.
5. Análisis cinemático básico de los mecanismos modelados como primer paso
para observar su comportamiento mecánico mediante el módulo Motion de
SolidWorks.

Pág. 12 Memoria
4. Estado del arte
Hoy en día, Internet es el medio de comunicación y difusión que utiliza por
excelencia la mayor parte de la población. Millones de estudiantes lo utilizan para
realizar consultas respecto asignaturas que cursan a lo largo de su año escolar. Es
por todo ello que, la aparición de este fenómeno ha supuesto un cambio drástico en
la sociedad.
El profesorado tiene como objetivo enseñar con éxito las asignaturas que imparten.
Es por este motivo que, son cada vez más entidades las que han visto como una
oportunidad de mejora, la introducción de recursos didácticos vía internet en sus
clases.
El presente paradigma, como todo fenómeno nuevo, ha venido acompañado de una
transición de adaptación. Las dificultades a nivel de logístico han implicado una
problemática en cuanto a que no todos los alumnos pueden hacer uso de dichos
recursos. La mayoría de recursos didácticos se hacen uso mediante Internet. Es por
todo ello, que el profesorado ha optado por ejercer su profesión mediante el uso de
dichos recursos, convirtiendo las clases en dinámicas y, por tanto, motivando con
valor añadido a sus alumnos a estudiar dicha asignatura.
A continuación, se exponen varios de los programas de análisis de mecanismos que
utilizan varias universidades españolas, como recursos didácticos, durante la
asignatura de Teoría de Máquinas y Mecanismos.
La Universidad Politécnica de Valencia dispone de un Software, Cosmos
Motion, para simular el funcionamiento de los mecanismos diseñados en 3D.
Cabe destacar que, el Software se encuentra incluido dentro del programa
SolidWorks. A continuación, se muestra un ejemplo. (Figura 1)
Figura 1. Captura de pantalla del Software Cosmos Motion [5]

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 13
La Universidad Politécnica de Málaga dispone de una aplicación,
WinMecC, para simular mecanismos planos con un grado de libertad.
Asimismo, realiza el análisis cinemático y dinámico de mecanismos planos
con cualquier número de eslabones. A continuación, se muestra un ejemplo.
(Figura 2)
Figura 2. Aplicación WinMecC [6]
La Universitat Politècnica de Catalunya utiliza un Programa de Análisis de
Mecanismos, denominado PAM, para modelar y simular mecanismos planos
de barras. Asimismo, utiliza el programa Geogebra para ver con mayor
claridad la simulación del funcionamiento de los mecanismos creados. A
continuación, se muestra un ejemplo. (Figuras 3 y 4)
Figura 3. Programa PAM [7]

Pág. 14 Memoria
Figura 4. Mecanismos cognados realizados con Geogebra [8]

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 15
5. Procedimiento de selección y modelación
de máquinas y mecanismos
A continuación, se muestra el diagrama de bloques (Figura 5) que expone el
procedimiento seguido desde la identificación y selección de un mecanismo real a
modelar hasta la simulación 3D de su funcionamiento y la realización de un análisis
cinemático mediante la herramienta de modelación y simulación SolidWorks Motion.
Figura 5. Procedimiento de trabajo para la modelación y simulación de los mecanismos.
A continuación, se detallan las etapas del procedimiento antes expuesto.
5.1. Selección del mecanismo a modelar y simular
En el presente proyecto se han escogido 6 mecanismos, muchas veces presentes
en la vida cotidiana. Estos se han agrupado dependiendo de la sencillez o
complejidad de su estructura.
Selección del
mecanismo a modelar
Caracterización del
mecanismo elegido
Creación del Modelo
Virtual en 3D
Esquematización del mecanismo
Animación en 3D del
mecanismo
Análisis del movimiento Modelación y simulación
cinemática mediante
SolidWorks Motion

Pág. 16 Memoria
Mecanismos de estructura sencilla y habitualmente presentes en la
vida cotidiana: Aquí se definen como aquellos artefactos que en su
estructura contienen básicamente barras articuladas y/o sistemas de
tornillo tuerca, y que normalmente son de accionamiento manual.
Sacacorchos de brazos o en forma de T
Flexo articulado de mesa
Tornillo de banco
Mecanismos de estructura compleja: Artefactos que incluyen
componentes mecánicos (como engranajes, muelles), eléctricos
(motores rotativos), hidráulicos, etc. Estos dispositivos, normalmente
menos comunes, se consideran que amplían más el conocimiento
técnico de los estudiantes de TMM.
Gato hidráulico de patín
Bomba de hinchar de pedal
Exprimidor eléctrico
5.2. Caracterización del mecanismo elegido
Con el fin de agilizar y facilitar la modelación de los mecanismos escogidos, ha sido
de gran importancia realizar previamente, un análisis estructural de los mecanismos
escogidos identificando los componentes que lo forman. En concreto, ha sido
necesario:
Identificar el tipo de sólido y los enlaces que forman cada
mecanismo (tornillo y tuerca –enlace helicoidal, muelle –sólido
elástico, bancada –sólido fijo, pistón y guía –enlace prismático,
manivela-bancada -articulación, etc.)
Analizar la geometría de cada sólido y determinar sus dimensiones.
En el caso de las ruedas dentadas se ha requerido contar el número
de dientes y medir su diámetro exterior y, haciendo uso de las

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 17
fórmulas correspondientes, determinar su módulo y normalizarlo
según los valores recogidos en tablas.
En el caso de los resortes, se ha medido su longitud, contado el
número de espiras, medido el diámetro del alambre y de la espira y
asumido un material con su módulo elástico, y haciendo uso de las
fórmulas correspondientes determinar su constante elástica.
Cabe destacar que todas las mediciones han sido llevadas a cabo mediante el uso
de un pie de rey, una regla, un metro y un transportador de ángulos.
5.3. Creación del modelo virtual en 3D
Para la creación de los modelos virtuales se ha utilizado el software CAD
SolidWorks. Gracias a esta herramienta se ha conseguido reproducir de forma
virtual los elementos mecánicos que forman los mecanismos escogidos. Los
aspectos y/o elementos más destacados a la hora de la creación de los modelos
son los explicados en los siguientes subapartados.
5.3.1. Imagen de la escala del instrumento barómetro
Con el fin de darle mayor realismo al modelo virtual del mecanismo de la bomba de
hinchar, se ha insertado en el elemento barómetro, la fotografía de la escala de
presión del propio barómetro del mecanismo real. Para ello, ha sido necesario hacer
uso de la herramienta “imagen de croquis” que se encuentra dentro de la
herramienta de croquizar. En la Figura 6 se muestra las indicaciones o
procedimiento realizado para realizarlo.

Pág. 18 Memoria
Figura 6. Imagen de la opción herramienta de croquizar de SolidWorks
Una vez se entra en la herramienta de Imagen de croquis, se abre el siguiente
desplegable, mostrado en la Figura 7. En él se pueden modificar los parámetros de
tamaño (altura y anchura) y la posición (coordenadas X, Y y Z) según se desee.
Figura 7. Indicaciones para situar la imagen deseada

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 19
5.3.2. Mecanismo de ruedas dentadas (Engranajes)
Los mecanismos de ruedas dentadas o engranajes se han creado mediante la
biblioteca Toolbox [9] que ofrece SolidWorks. Gracias a la biblioteca CAD de piezas
comunes y modelos de componentes del diseño en 3D que ofrece, se pueden
diseñar de forma guiada, rápida y sencilla y utilizando diferentes normas como por
ejemplo: la DIN (Instituto Alemán de Normalización), la JIS (Normas Industriales de
Japón) o la ISO (Organización Internacional de Estandarización), etc. elementos
mecánicos como son por ejemplo: rodamientos, tornillos y pernos, chavetas,
tuercas, anillos, pasadores, engranajes, miembros estructurales, engranajes y
arandelas, etc. Para hacer uso de la biblioteca ToolBox, hay que dirigirse a la opción
Complementos de SOLIDWORKS (), tal y como se muestra en la Figura 8.
Figura 8. Complemento Toolbox de SolidWorks
Una vez cargada la biblioteca citada, el primer paso es escoger la norma
correspondiente que en el caso del presente proyecto es la norma ISO que
considera el Sistema Internacional de Unidades o Sistema métrico, luego se va a la
opción “Transmisión de potencia” y dentro de ésta, se elige “Engranajes” y, por
último, el tipo de engranaje a diseñar, tal y como se muestra en la Figura 9.
Figura 9. Normas y tipos de engranajes posibles a modelar (Herramienta Toolbox)

Pág. 20 Memoria
Las transmisiones por ruedas dentadas (engranajes) identificados en los
mecanismos elegidos y modelados en este TFG son los siguientes:
Engranajes cilíndricos y cónicos de dientes rectos. Para poder crear el modelo 3D
de cada uno de ellos ha sido necesario (previamente medidas las dimensiones
reales, contados los dientes y determinado su módulo) seleccionar el tipo de
engranaje, hacer clic con el botón derecho del ratón, y elegir la opción “Crear pieza”.
A continuación, en la Figura 10, se muestra un ejemplo del menú desplegable de
creación del engranaje cónico de dientes rectos.
Figura 10. Configuración engranaje cónico de dientes rectos.
Los datos a cumplimentar en dicho menú son los siguientes:
Número de dientes: z (contados en la rueda real)
Anchura de la cara b (mm): distancia de una cara a la otra
que define la longitud de un diente.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 21
Diámetro interior del cubo del engranaje (mm): diámetro
interior de la parte central del engranaje por el que éste se
une a su eje.
Módulo (mm): En este caso se lleva a cabo un proceso de
ingeniería inversa; es decir, partiendo de un engranaje que ya
existe en un mecanismo o máquina a modelar, se requiere
encontrar el valor del módulo de dicho engranaje a partir de
contar su número de diente y de medir el diámetro exterior.
Por ejemplo: Si el engranaje es cónico el módulo se puede calcular:
𝑚 =𝑑𝑎
𝑧 (1)
𝑑𝑎 hace referencia al diámetro exterior del engranaje. A continuación, en la Figura
11 se muestran dos rueda cónicas engranadas con ángulos del cono del piñón y
de la rueda igual a 45º, y por tanto, ángulo entre ejes de 90º. Entre cotas, se
destaca la anchura de cara b del diente.
Figura 11. Esquema y parámetros de un engranaje cónico [10]
Si el engranaje es cilíndrico el módulo se puede calcular:
𝑚 =𝑑𝑒𝑥𝑡
𝑧 + 2 (2)

Pág. 22 Memoria
𝑑𝑒𝑥𝑡 hace referencia al diámetro exterior del engranaje. A continuación, en la
Figura 12, se muestra la cota.
Figura 12. Esquema y parámetros de un engranaje cilíndrico [11]
Los valores de los módulos determinados por las fórmulas Ec. (1) y Ec. (2), han de
normalizarse con los valores de la norma ISO 54-1996 [12]. A continuación, se
muestra en la Tabla 2 los módulos normalizados.
Tabla 2. Tabla de módulos normalizados [13]
5.3.3. Resortes
Con el fin de hacer resortes [14] de forma rápida y sencilla, se ha hecho uso de la
herramienta croquis 3D. Gracias, a dicha herramienta se puede trabajar en todo
momento en los 3 planos, haciendo rápidamente los perfiles deseados. En la Figura
13 se muestra cómo llegar a ella.
En este proyecto se han modelado resortes lineales y resortes torsionales. En el
mecanismo del tornillo de banco se ha requerido modelar un resorte lineal y en el
mecanismo del gato hidráulico de patín, un resorte torsional.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 23
Figura 13. Herramienta Croquis 3D
A diferencia de realizar un croquis 2D, no hace falta seleccionar un plano inicial para
poder hacer uso de la herramienta. Únicamente hay que ir seleccionando el plano
donde uno quiere dibujar, consiguiendo perfiles en un mismo croquis como se
muestra en la Figura 14.
Figura 14. Ejemplo de Croquis 3D, utilizando planos planta y alzado
5.4. Esquematización de los mecanismos que conforman
la máquina
Se realiza la esquematización de los mecanismos analizados, con el objetivo de
facilitar la compresión de la estructura de cada mecanismo y también de facilitar su
descripción. Los esquemas se hacen sobre la vista en alzado del mecanismo que se
ha modelador previamente en 3D. Asimismo, se incluyen los parámetros

Pág. 24 Memoria
geométricos como distancias o ángulos y las coordenadas de posición y orientación
de los elementos. Cabe destacar, que se utiliza la simbología normalizada y
estudiada en las clases de Teoría de Máquinas y Mecanismos [12]. A continuación,
se muestra un ejemplo del esquema del mecanismo sacachorcos (Figura 15).
Figura 15. Ejemplo de Esquema de símbolos del mecanismo sacacorchos.
5.5. Animación 3D del mecanismo o máquina
Para ver que funciona de forma correcta el mecanismo diseñado, mediante el
módulo Motion del programa SolidWorks, se le ha proporcionado movimiento. El
presente módulo permite visualizar el movimiento del conjunto de elementos
ensamblados, gracias a la opción de poder añadir motores, muelles,
amortiguadores, fuerzas, contacto entre elementos e introducir el efecto de la
aceleración de la gravedad en el ensamblaje que se quiere estudiar. Asimismo,
también permite hacer mediciones y gráficos cinemáticos de variables del modelo
que interesen. [15]
Las animaciones desarrolladas, son de aproximadamente, 15s y comprende
diferentes ángulos de forma para que se pueda apreciar correctamente su
funcionamiento. Asimismo, en algunos casos, se ha visto interesante hacer
transparente algún componente del mecanismo, con el fin de visualizar el
movimiento de todas las piezas.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 25
SolidWorks ofrece tres tipos de simulación de movimiento de ensamblajes [16]:
Animación: es una simulación de movimiento simple que ignora las
fuerzas, los contactos, las propiedades inerciales y otros aspectos de
los componentes. Su uso resulta ideal para, por ejemplo, la
verificación de las relaciones de posición o las animaciones básicas
correctas.
Movimiento básico: ofrece cierto nivel de realismo al tener en cuenta,
por ejemplo, las propiedades inerciales de los componentes. Sin
embargo, no reconoce las fuerzas aplicadas externamente.
Análisis de movimiento: es la herramienta de simulación más
completa que refleja las características de análisis necesarias, como
las propiedades inerciales, las fuerzas externas, los contactos, la
fricción en las relaciones de posición, etc. Con ella es posible obtener
gráficos de parámetros cinemáticos como posición, velocidad y
aceleración y también permite hacer el análisis dinámico de un
sistema mecánico.
Éste complemento permite trabajar con 3 opciones distintas: a) Animación, b)
Movimiento Básico y c) Análisis de movimiento, las cuales están ordenadas de
menos a más realista en relación con parámetros que se han de tener en cuenta
para llevar a cabo la simulación.
Para este apartado del proyecto se utiliza la opción “Animación”, que se define como
“un movimiento conducido por puntos clave o motores, y restringido por relaciones
de posición de ensamblaje”; es decir que no entran en consideración aspectos como
la inercia o la gravedad ya que no son necesarios para visualizar el funcionamiento
de los mecanismos o el análisis de su cinemática.
En la Tabla 3, se muestran las funciones que tiene el módulo Motion:
HORIZONTAL VERTICAL
1ª fila Tiempo de simulación
1ª
columna
Tiempo que permite el
desplazamiento por toda la
simulación, además de
cambiar parámetros de un
instante en concreto
2ª fila Orientación de la cámara
Rest
o
Motores y resortes que se
hayan añadido al ensamble y
las piezas que conforman el
ensamblaje
Tabla 3. Funciones módulo Motion de SolidWorks

Pág. 26 Memoria
Seguidamente, en la Figura 16 se muestran las funciones descritas en la Tabla 3
correspondiente a la simulación del mecanismo Flexo, que se estudia en este
proyecto.
Figura 16. Captura de pantalla del SolidWorks Motion Manager, durante la animación del
mecanismo Flexo articulado de mesa.
En la Tabla 4, se muestran los motores utilizados respecto a cada uno de los seis
mecanismos diseñados.
MECANISMO TIPO DE MOTOR UTILIZADO
FLEXO articulado de mesa MOTOR ROTATORIO con ángulo girado
BOMBA DE HINCHAR de pedal MOTOR LINEAL con distancia vertical limitada
EXPRIMIDOR eléctrico MOTOR ROTATORIO con velocidad angular
constante.
GATO HIDRÁULICO de patín MOTOR LINEAL con distancia vertical limitada
TORNILLO DE BANCO MOTOR ROTATORIO con velocidad angular
constante.
SACACORCHOS de brazos o
forma de T MOTOR ROTATORIO, con ángulo girado
Tabla 4. Parámetros utilizados para la animación de cada uno de los mecanismos
Para especificar un tipo de movimiento de entrada en cada ensamblaje de los
mecanismos es necesario seleccionar la opción “Motor” cuyo icono es como se
muestra en la figura 17.
Figura 17. Opción para la definición de un tipo de motor en el Menú del Solid Works Motion
Manager

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 27
Seguidamente, se abre la caja de diálogo correspondiente a la definición del motor y
se debe rellenar el desplegable que aparece a la izquierda de la pantalla (Figuras 18
y 19), teniendo en cuenta las propiedades antes expuestas en la tabla 4.
5.5.1. Ejemplo de definición de un motor rotario en la
especificación del movimiento de entrada de un mecanismo.
Como se muestra en la Figura 18, para poder incluir un motor rotario, en este caso
se expone el ejemplo del mecanismo de un flexo y el motor se coloca en una de las
barras del flexo, se deben de indicar los parámetros:
El objeto a mover.
El sentido de rotación de su eje (horario o anti horario).
El tiempo a recorrer el desplazamiento.
El desplazamiento angular recorrido.
Figura 18. Ejemplo de definición de un motor del Flexo articulado
5.5.2. Ejemplo de definición de un motor lineal en la especificación
del movimiento de entrada de un mecanismo
Como se muestra en la Figura 19, para poder incluir un motor lineal, en este caso
para explicarlo, se considera el mecanismo de bomba de pedal simulando la acción
del pie, ya que en la práctica se introduce una fuerza con el mismo que se puede
considerar vertical, tal como hace un actuador lineal.

Pág. 28 Memoria
Para ello se deben de indicar los parámetros:
El objeto a mover.
El sentido de del desplazamiento lineal (hacia arriba o hacia abajo).
La distancia recorrida.
Figura 19. Ejemplo de indicación de un motor lineal en el mecanismo de la bomba de pedal
En el caso de la animación de una transmisión por engranajes se ha requerido
ajustar los frames por segundo en el apartado Propiedades del estudio de
movimiento de la animación. De esta manera, se ha conseguido que la rotación de
las ruedas dentadas fuera la adecuada. En el mecanismo del exprimidor se han
impuesto 5 frames por segundo, tal y como se muestra en la Figura 20.
Figura 20. Propiedades del estudio de movimiento

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 29
5.6. Análisis del movimiento: generación de gráficos
cinemáticos
Para poder llevar a cabo el análisis del movimiento [17], inicialmente, se debe
activar el módulo Motion y, seguidamente, seleccionar Análisis de movimiento,
como se muestra en la Figura 21. Como se ha dicho antes, esta opción permite
obtener gráficos de los parámetros cinemáticos que se deseen estudiar en el
mecanismo modelado y animado [18].
Figura 21. Opción Análisis de movimiento
Asimismo, es necesario identificar cuáles serán las variables de entrada (elemento
motriz del mecanismo) y cuáles las de salida del movimiento (por ejemplo: posición,
velocidad o aceleración) y además hay que indicar si el mecanismo contiene
muelles, amortiguadores o sólidos con en contacto superficial -es decir formando
pares cinemáticos superiores- si se quiere que los contactos entre sólidos no
traspasen. En caso de que alguno de los mecanismos modelados disponga de las
características comentadas, es necesario activarlas mediante sus respectivos
iconos. En la Figura 22, se muestran.
Figura 22. Identificación de muelles, amortiguadores y contactos entre sólidos
5.6.1. Definición de las características de un muelle
Para aquellos mecanismos que sus modelos incluían un resorte, ha hecho falta
hacer uso de la siguiente función. Cabe remarcar que, su efecto sería notable al
realizar un análisis dinámico del mecanismo. Como se puede ver en la Figura 23,
para incluir un resorte ha sido necesario indicar los siguientes parámetros:
Tipo de resorte: Lineal/torsional
Constante elástica en N/m
El paso del muelle

Pág. 30 Memoria
Figura 23. Propiedades a complentar muelle
5.6.2. Definición de los pares superiores - Contacto entre sólidos
En muchos de los mecanismos ha sido esencial incluir la funcion de contacto entre
solidos con el fin de que las piezas que forman los mecanismos no se traspasasen.
Cabe remarcar que su efecto sería notable al realizar un análisis dinámico del
mecanismo. Como se puede ver en la Figura 24, para definir la presente función ha
sido necesario indicar los siguientes parámetros:
Tipo de contacto: Sólidos
Figura 24. Propiedades a completar en el contacto entre sólidos

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 31
Gracias a esta opción de análisis de movimiento del SolidWorks Motion, en el
trabajo se han podido extraer gráficos cinemáticos que dependen del tiempo, que
permiten explicar la relación entre dichas variables y comprobar que los valores
obtenidos coinciden con los reales del mecanismo analizado.

Pág. 32 Memoria
6. Mecanismos elegidos para la Modelación y
Simulación
A continuación, se describen y analizan los 6 mecanismos seleccionados. El orden
en el que son presentados está basado en la simplicidad de su estructura.
6.1. Mecanismos presentes en máquinas o artefactos
comunes
6.1.1. Mecanismo Tornillo de banco
El primer mecanismo escogido es un tornillo de banco (Figura 25), herramienta de
gran utilidad tanto para uso doméstico (bricolaje) como para uso profesional en
talleres mecánicos. Este mecanismo es un complemento ideal para la sujeción con
seguridad de piezas sobre las cuales se precisan hacer operaciones como corte con
sierra, roscado a mano o soldadura de partes. [20]
El tornillo de banco, como se muestra en la Figura 25, consta de un sistema de
fijación en su parte inferior que permite fijarlo a la mesa de trabajo mediante la
ayuda del tornillo husillo roscado de paso 𝑝𝑟𝑜𝑠𝑐𝑎𝑖𝑛𝑓 = 22𝑚𝑚 inferior que accionado
por su palanca avanza en la dirección vertical aproximándose a la guía de la
mordaza móvil, normalmente apoyada en una mesa de trabajo (no mostrada), de
modo que extremo del husillo se aprieta contra la parte inferior de la mesa. Una vez
fijado, el tornillo dispone en su parte superior de una mordaza fija (contra la cual se
aprieta la pieza a sujetar) y una móvil que se desplaza horizontalmente una
distancia en una g controlada mediante el husillo superior de paso 𝑝𝑟𝑜𝑠𝑐𝑎𝑠𝑢𝑝 =
1,5𝑚𝑚 que se acciona mediante su palanca.
A continuación, se muestra el modelo real (Figura 25) y el modelo virtual (Figura 26)
En este último, se indican cada uno de sus componentes.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 33
Figura 25. Mecanismo tornillo de banco (Modelo real)
Figura 26. Mecanismo tornillo de banco (Modelo virtual)

Pág. 34 Memoria
Teniendo en cuenta, cada uno de los componentes que forman el presente
mecanismo y el tipo de enlace entre ellos, y considerando que el sistema tiene un
grado de libertad forzado que controla la evolución de la distancia s - indicada más
adelante en el esquema de símbolos del mecanismo – entonces el sistema
roscado superior se considera como un actuador lineal, y a partir de esta
consideración, se calcula sus grados de libertad, aplicando el Criterio de Grübler-
Kutzbach.
gdlGrübler = 1(sólido móvil)·3 gdl/sólido – 1(Prismático)·2gdl/prismático = 1 gdl (3)
El sistema no presenta redundancias.
El modelo físico incluye un muelle lineal que, además, sirve de elemento de unión
de las dos partes rotativas que forman el husillo, considerado el conjunto como un
único sólido.
Para calcular la constante de elasticidad k del muelle se ha utilizado la fórmula
para resortes de tasa constante [19]:
𝑘 =𝑑4 · 𝐺
8 · 𝐷3 · 𝑁𝑎= 3,79
𝑁
𝑚 (4)
k = constante de elasticidad
d = diámetro del resorte = 1 mm = 0,001 m
D = diámetro exterior del muelle = 11 mm = 0,011 m
G = módulo de elasticidad torsional = 80,8 GPa (para aleaciones de
acero)
𝑁𝑡 = número de espiras totales = 4
𝑁𝑎 = 𝑁𝑡 − 2 = número de aspiras activas = 2
Una vez analizada la estructura del mecanismo real (elementos y pares
cinemáticos), visto su funcionamiento, se propone realizar su esquema de símbolos
ubicando los mismos en la vista de alzado. En la Figura 27 se muestra la vista en
alzado del modelo 3D y superponen los pares cinemáticos y elementos que forman
el mecanismo.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 35
Figura 27. Alzado mecanismo mordaza de mesa
A continuación, en la Figura 28, se muestra su esquema de forma independiente,
identificando cada uno de sus parámetros geométricos.
Figura 28. Esquema mecanismo Tornillo de banco

Pág. 36 Memoria
Por último, se muestran los resultados obtenidos después de someter al
mecanismo a un análisis de movimiento. En concreto, para el presente
mecanismo, se ha considerado un motor rotatorio en el tornillo superior a
velocidad constate y un motor rotatorio en el tornillo inferior a velocidad constate.
A continuación, se muestran los gráficos extraídos que se han considerado de
interés.
Gráfico de desplazamiento lineal de la mordaza móvil (s):
Figura 29. Gráfico que representa el desplazamiento lineal de la mordaza móvil (s)
Como se puede ver en la Figura 29, la mordaza es capaz de desplazarse 13mm en
10s de simulación. Ello corresponde a un valor de 8.66 vueltas del tornillo, ya que el
mismo tiene un paso de 1,5 mm.
Una vez, obtenido el desplazamiento lineal de la mordaza, se puede calcular el
ángulo girado del tornillo superior [11]. A continuación, se muestran los cálculos:
𝑠 = 𝑝𝑟𝑜𝑠𝑐𝑎𝑠𝑢𝑝 · 𝜑1
2 · 𝜋=
1,5 · 𝜑1
2 · 𝜋= 13 → 𝜑1 = 54,45 𝑟𝑎𝑑 (5)
Gráfico de desplazamiento lineal del tornillo inferior (h):
Figura 30.Gráfico donde se muestra el desplazamiento lineal del tornillo inferior (h)

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 37
Como se puede ver en la Figura 30, el tornillo es capaz de desplazarse 7mm en 10s.
Ello corresponde a un valor de 2.1 vueltas del tornillo inferior, ya que el mismo tiene
un paso de 2 mm.
Una vez, obtenido el desplazamiento lineal de la mordaza, se puede calcular el
ángulo girado del tornillo superior [12]. A continuación, se muestran los cálculos:
𝑠 = 𝑝𝑟𝑜𝑠𝑐𝑎𝑖𝑛𝑓 · 𝜑2
2 · 𝜋=
2 · 𝜑2
2 · 𝜋= 13 → 𝜑2 = 40,84 𝑟𝑎𝑑 (6)
6.1.2. Mecanismo Sacacorchos de brazos o forma de T
El segundo mecanismo escogido ha sido un sacacorchos de brazos o forma de T,
un imprescindible en todas las cocinas para los amantes del vino. Este mecanismo,
permite extraer los tapones hechos con corcho que se utilizan para cerrar las
botellas.[21]
A continuación, se muestra el mecanismo escogido (Figura 31) y el modelo virtual
(Figura 32). En este último, se indican cada uno de sus componentes. Su
funcionamiento se basa en introducir la hélice cilíndrica en el corcho de la botella,
girando el eje central en el cual es solidaria dicha hélice hasta el final de la hélice y
ésta atravesar toda la longitud del corcho y luego al accionar los dos balancines
(brazos) ejerciendo una fuerza en los mismo hacia abajo, lo brazos que terminan en
un sector circular dentado que engrana con la cremallera del eje central y convierte
el movimiento de rotación de los brazos en translación de dicha parte para extraer el
corcho de la botella, venciendo la fuerza de fricción que existe entre el corcho y la
boca de la botella.

Pág. 38 Memoria
Figura 31. Sacacorchos de brazos o forma de T (modelo real)
Figura 32. Sacacorchos de brazos o forma de T (modelo virtual)

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 39
Por inspección directa se observa que el mecanismo sacacorchos cuando está en
vacío tiene 2 gdl, ya que para detenerlo hay que anular tanto la velocidad de
translación del husillo �̇�, como su velocidad angular �̇�2. (Figura 34)
Sin embargo, cuando el “mecanismo está en la fase de trabajo” colocada su base
o campana en la boca de la botella (y, por tanto, considerándola la bancada), éste
pasa a tener un único grado de libertad ya que cuando se está introduciendo la
hélice en el corcho, esto funciona como un par helicoidal, es decir al rotar la parte
central que contiene a la hélice ésta avanza linealmente una distancia
proporcional al paso de hélice 𝑝ℎé𝑙. Una vez se ha introducido la hélice en el
corcho (considerando ambos elementos como un único sólido), durante la fase de
trabajo, entonces el mecanismo se acciona haciendo girar un ángulo 𝜑1 los
brazos, situados de manera simétrica respecto al eje axial de la hélice y el
mecanismo pasa a analizarse como un mecanismo plano. Aplicando el criterio de
Grübler al mecanismo considerado ahora con movimiento plano, se tiene:
gdlGrübler = 3·(sólidos móviles)·3gdl/sólido – 2·(articulaciones)·2gdl/articulación –
2(Transmisiones)·1gdl/transmisión – 1·(prismático)·2gdl/prismático = 1gdl (7)
El sistema no presenta redundancias.
Este mecanismo (Figura 34), permite transformar la rotación de una barra (brazo)
- ángulo de giro 𝜑1 con su segmento circular dentado (piñón de z=7 dientes y
paso 𝑝𝑐𝑟𝑒𝑚), en una translación s de la parte central de sección dentada
(cremallera) con la hélice cilíndrica en su extremo. Dicha translación se puede
calcular según la expresión siguiente [12]:
𝑠 = 𝑧 · 𝑝𝑐𝑟𝑒𝑚 ·𝜑1
2𝜋 (8)
Una vez analizado el funcionamiento general del mecanismo, identificados sus
grados de libertad, en la Figura 33 se muestra la vista en alzado del modelo 3D y se
identifican y superponen los pares cinemáticos y elementos que forman el
mecanismo.

Pág. 40 Memoria
Figura 33. Alzado mecanismo sacacorchos de brazos o forma de T
A continuación, en la Figura 34 se muestra su esquema de forma independiente,
identificando cada uno de sus parámetros geométricos.
Figura 34. Esquema mecanismo sacacorchos de brazos o forma de T

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 41
Por último, se muestran los resultados obtenidos después de someter al mecanismo
a un análisis de movimiento. En concreto, para el presente mecanismo, se ha
considerado un motor rotario controlado por distancia y tiempo. En concreto, se ha
impuesto un movimiento de 120º en 3 segundos. A continuación, se muestran los
gráficos extraídos que se han considerado de interés:
Gráfico de desplazamiento angular de la barra (brazo derecho) que contiene punto
D:
Figura 35. Gráfico donde se muestra el desplazamiento angular del punto D
Como se puede ver en la Figura 35, verdaderamente, los balancines se desplazan
120º en 3 segundos.
Gráfico de desplazamiento lineal del punto E del extremo de la hélice:
Figura 36. Gráfico donde se muestra el desplazamiento lineal del punto E
Como se puede ver en la Figura 36, teniendo en cuenta las condiciones
establecidas, la hélice se desplaza un total de 28mm. Lo que corresponde a 7 veces
el paso de la cremallera de la parte central, es decir que los 7 dientes de la sección
de dentada contactan con los 7 dientes de la parte central, al girar el brazo los 120º.

Pág. 42 Memoria
6.1.3. Mecanismo Flexo articulado de mesa
El tercer mecanismo escogido ha sido un flexo, una lámpara de mesa con brazo
articulado. Este mecanismo, permite libertad de movimiento y posicionamientos
diferentes, tanto para iluminar partes importantes de escritorio o mesa de trabajo
como para evitar deslumbramientos. [22]
A continuación, se muestra el mecanismo escogido (Figura 37) y el modelo virtual
(Figura 38). En este último, se indican cada uno de sus componentes.
Figura 37. Mecanismo Flexo articulado de mesa (modelo real)
Figura 38. Mecanismo Flexo articulado de mesa (modelo virtual)

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 43
El flexo está formado por dos balancines, dos bielas y un foco, que gracias a las
articulaciones que las unen, pueden adaptar múltiples posiciones para conseguir
un mayo alumbrado.
En el caso del flexo (Figura 39), aunque en su estructura contiene dos
paralelogramos articulados (ABCE y FDHG) que le confieren mayor robustez al
flexo y también limitan las rotaciones de las barras en las configuraciones donde
contactan entre sí las de mayor longitud, el mecanismo “se considera de tipo
estructura de árbol”, y su función es controlar la orientación y la altura del foco
emisor (sólido QP), por lo que los grados de libertad (gdl) se consideran a partir
de la suma de los grados gdl relativos entre las barras, en función del tipo de
enlace (en este caso, todos son articulaciones).
Para el estudio aquí realizado, se ha considerado que el mecanismo tiene tres gdl
(ya que al hacer las velocidades �̇�1 = �̇�2 = �̇�3= 0 (Figura 40), es decir detener
las rotaciones de las barras AE, FG y PD todo el mecanismo queda en reposo).
Se parte de la hipótesis de hacer que todos los elementos se muevan en el plano
donde se ha dibujado el esquema, y se neglige la rotación del foco emisor de luz
alrededor del eje Q (así los sólidos IQ y QP se consideran solidarios).
Teniendo en cuenta, cada uno de los componentes que engloban el presente
mecanismo, a continuación, se calcula sus grados de libertad, aplicando el
Criterio de Grübler-Kutzbach.
gdlGrübler = 5·(sólido móvil)·3 gdl/sólido – 8·(articulaciones)· 2gdl/articulación = -1
gdl (9)
Grado de Redundancia = gdlInsp.directa – gdlGrübler = 1gdl – (-1) gdl = 2 (10)
De este modo, bajo las consideraciones antes expuestas, el mecanismo presenta
dos redundancias totales, que corresponden a las barras largas BC y DH (Figura
39), sin las cuales el mecanismo alcanzaría prácticamente las mismas
configuraciones de antes, al hacer la estructura de árbol los ángulos �̇�1, �̇�2 𝑦 �̇�3.
(Figura 40)
Una vez analizado el funcionamiento general del mecanismo, identificados sus
grados de libertad, en la Figura 39 se muestra la vista en alzado del modelo 3D y se
identifican y superponen los pares cinemáticos y elementos que forman el
mecanismo.

Pág. 44 Memoria
Figura 39. Alzado mecanismo Flexo articulado de mesa
A continuación, en la Figura 40 se muestra su esquema de forma independiente
identificando cada uno de sus parámetros geométricos.
Figura 40. Esquema mecanismo Flexo articulado de mesa

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 45
Por último, se muestran los resultados obtenidos después de someter al mecanismo
a un análisis de movimiento. En concreto, para el presente mecanismo, se han
considerado 3 motores rotatorios controlados por tiempo. Los motores están
definidos entre los sólidos bancada y balancín AE, biela FG respecto a la referencia
tierra y foco (barra QP) respecto a la referencia tierra (Figura 40). Los ángulos a
girar y el tiempo de simulación definidos para cada uno son los siguientes:
Balancín 60º en 2s
Biela 30º en 2s
Foco 25º en 4s
A continuación, se muestran los gráficos cinemáticos extraídos que se han
considerado de interés:
Gráfico de desplazamiento lineal del punto E
Figura 41. Gráfico donde se muestra el desplazamiento lineal del punto E
Tal y como se muestra en la Figura 41, el balancín al empezar a desplazarse con
ángulo inferior a 90º (es decir está inicialmente orientado con una inclinación a la
derecha menor a 90º respecto de la vertical), el punto E, inicialmente, se eleva y al
llegar a los 90º empieza a bajar. Cabe destacar que, empieza y acaba a la misma
altura.
Pág. 46 Memoria
Gráfico de desplazamiento lineal del punto G
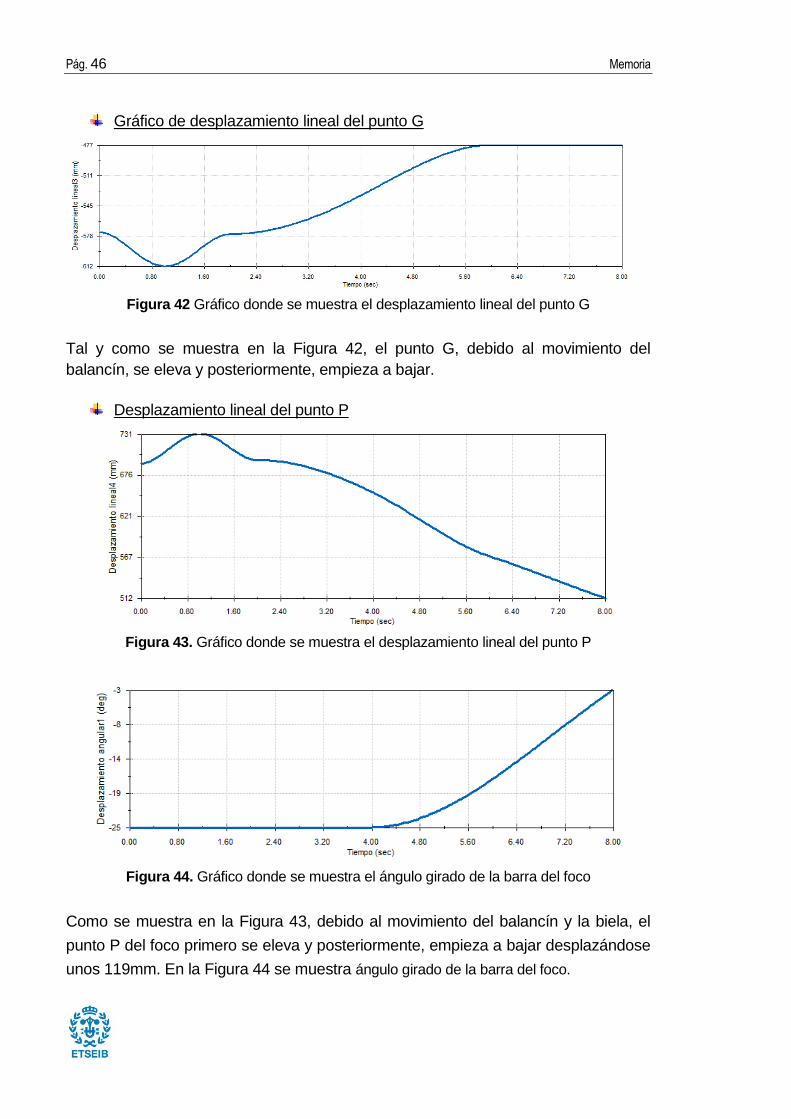
Figura 42 Gráfico donde se muestra el desplazamiento lineal del punto G
Tal y como se muestra en la Figura 42, el punto G, debido al movimiento del
balancín, se eleva y posteriormente, empieza a bajar.
Desplazamiento lineal del punto P
Figura 43. Gráfico donde se muestra el desplazamiento lineal del punto P
Figura 44. Gráfico donde se muestra el ángulo girado de la barra del foco
Como se muestra en la Figura 43, debido al movimiento del balancín y la biela, el
punto P del foco primero se eleva y posteriormente, empieza a bajar desplazándose
unos 119mm. En la Figura 44 se muestra ángulo girado de la barra del foco.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 47
6.1.4. Mecanismo Bomba de hinchar de pedal
El cuarto mecanismo escogido ha sido una bomba de pedal, un mecanismo de
palanca que se acciona mediante la ayuda de un pie. Incorpora un manómetro,
con el fin de saber en todo momento la presión realizada. [23]
A continuación, se muestra el mecanismo escogido (Figura 45) y el modelo virtual
(Figura 46). En este último, se indican cada uno de sus componentes.
Figura 45. Mecanismo Bomba de hinchar de pedal (modelo real)

Pág. 48 Memoria
Figura 46. Bomba de pedal (modelo virtual)
Tal y como se ha comentado, la bomba de pedal es un mecanismo de palanca
que se acciona mediante el pie. Cuando la persona acciona la palanca, el pistón
(Figura 46) se desplaza hacia en el interior del cilindro comprimiendo el aire
contenido en su interior, y una vez lograda la presión requerida, la válvula del
extremo del cilindro deja pasar aire desde el interior del cilindro hacia el exterior a
través de la manguera no representada para hinchar, por ejemplo, neumáticos. El
retorno del pedal su posición inicial, para comenzar de nuevo el ciclo de
funcionamiento, se realiza por medio de un resorte torsional incluido en el modelo
virtual.
Por inspección directa se observa que el mecanismo de la bomba de pedal tiene 1
gdl, ya que para detenerlo hay que anular sólo una velocidad angular (Figura 48).
Si 𝜑1̇=0, la barra-pedal se detiene y el punto B queda fijo y, por tanto, la distancia
s entre los puntos B y C queda fija y todo queda en reposo. En el esquema se
incluye un actuador lineal, con el objetivo de indicar que se introduce una fuerza
que hace disminuir la distancia h.
Teniendo en cuenta, cada uno de los componentes que engloban el presente
mecanismo, a continuación, se calcula sus grados de libertad, aplicando el
Criterio de Grübler-Kutzbach.
gdlGrübler = 3·(sólidos móviles)·3gdl/sólido – 3·(articulación)·2gdl/articulación –
1·(prismático)·2gdl/prismático = 1 gdl (11)
El sistema no presenta redundancias.
Dado que los grados de libertad por inspección directa y por el criterio de Grübler-
Kutzbach coinciden, se confirma que no hay redundancias en este mecanismo.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 49
Para calcular la constante de elasticidad k del muelle se ha utilizado la fórmula
para resortes de tasa constante: [19]
𝑘 =𝑑4 · 𝐸
64 · 𝐷 · 𝑁𝑎= 9,64
𝑁
𝑚 (12)
k = constante de elasticidad
d = diámetro del alambre = 5,8 mm = 0,0058 m
D = diámetro exterior del muelle = 6,9 mm = 0,0069 m
E= módulo de elasticidad = 20,7 GPa (para aleaciones de acero)
𝑁𝑡 = número de espiras totales = 7,5
𝑁𝑎 = 𝑁𝑡 − 2 = número de aspiras activas = 5,5
Una vez analizado el funcionamiento general del mecanismo, identificados sus
grados de libertad, en la Figura 47 se muestra la vista en alzado del modelo 3D y se
identifican y superponen los pares cinemáticos y elementos que forman el
mecanismo.
Figura 47. Alzado mecanismo Bomba de hinchar de pedal
A continuación, se muestra su esquema de forma independiente identificando
cada uno de sus parámetros geométricos.

Pág. 50 Memoria
Figura 48. Esquema mecanismo Bomba de hinchar de pedal
Por último, se muestran los resultados obtenidos después de someter al
mecanismo a un análisis de movimiento. En concreto, para el presente
mecanismo, se ha considerado un motor lineal controlado por distancia y tiempo.
En concreto, se ha impuesto un movimiento de 25mm en 5 segundos. A
continuación, se muestran los gráficos extraídos que se han considerado de
interés:
Gráfico de desplazamiento lineal punto F
Figura 49. Gráfico donde se muestra el desplazamiento lineal punto F
Como se puede ver en la Figura 49, verdaderamente el punto F se desplaza
25mm durante la animación del movimiento que dura 5 segundos.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 51
Gráfico de desplazamiento del punto D:
Figura 50. Gráfico donde se muestra el desplazamiento punto D
Como se puede ver en la Figura 50, cuando pedal se acciona, el pistón (punto D)
se desplaza 10mm en 5 segundos.

Pág. 52 Memoria
6.1.5. Mecanismo Exprimidor eléctrico
El quinto mecanismo escogido ha sido un exprimidor, un imprescindible en todas
las cocinas para exprimir frutas. Este mecanismo, permite recoger los jugos de
frutas, en especial cítricos. [24]
A continuación, se muestra el mecanismo escogido (Figura 51) y el modelo virtual
(Figura 52). En este último, se indican cada uno de sus componentes.
Figura 51. Mecanismo Exprimidor eléctrico (modelo real)
Figura 52.Exprimidor eléctrico (modelo virtual)

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 53
El funcionamiento del exprimidor se basa en ejercer fuerza encima del cono
exprimidor, que activa a través de algún elemento de control el funcionamiento del
motor eléctrico, haciendo que el cono gire en sentido de rotación horario u anti
horario. Ello permite, como se ve más adelante (Figura 53 y Figura 54) transmitir
movimiento desde el eje del motor, a través de una transmisión reductora de
ruedas dentadas (tren de engranajes formados por ruedas cónicas y cilíndricas),
que hace girar el cono con baja velocidad angular y alto par.
Figura 53. Modelo virtual de las partes del exprimidor donde señala el motor de corriente
continua figura superior y la transmisión dentada en una vista trimétrica.
Figura 54. Modelo virtual de las partes del exprimidor donde señala el motor de corriente
continua vista en alzado y la transmisión dentada en una vista trimétrica.
Pág. 54 Memoria
Teniendo en cuenta, cada uno de los componentes que forman el presente
mecanismo y el tipo de enlace entre ellos y considerando que el sistema tiene un
grado de libertad forzado, se calcula sus grados de libertad, aplicando el Criterio de
Grübler-Kutzbach.
gdlGrübler = 3·(sólidos móviles)·3gdl/sólido – 3·(articulaciones)·2gdl/articulación –
2(Transmisiones)·1gdl/transmisión = 1gdl (13)
El sistema no presenta redundancias.
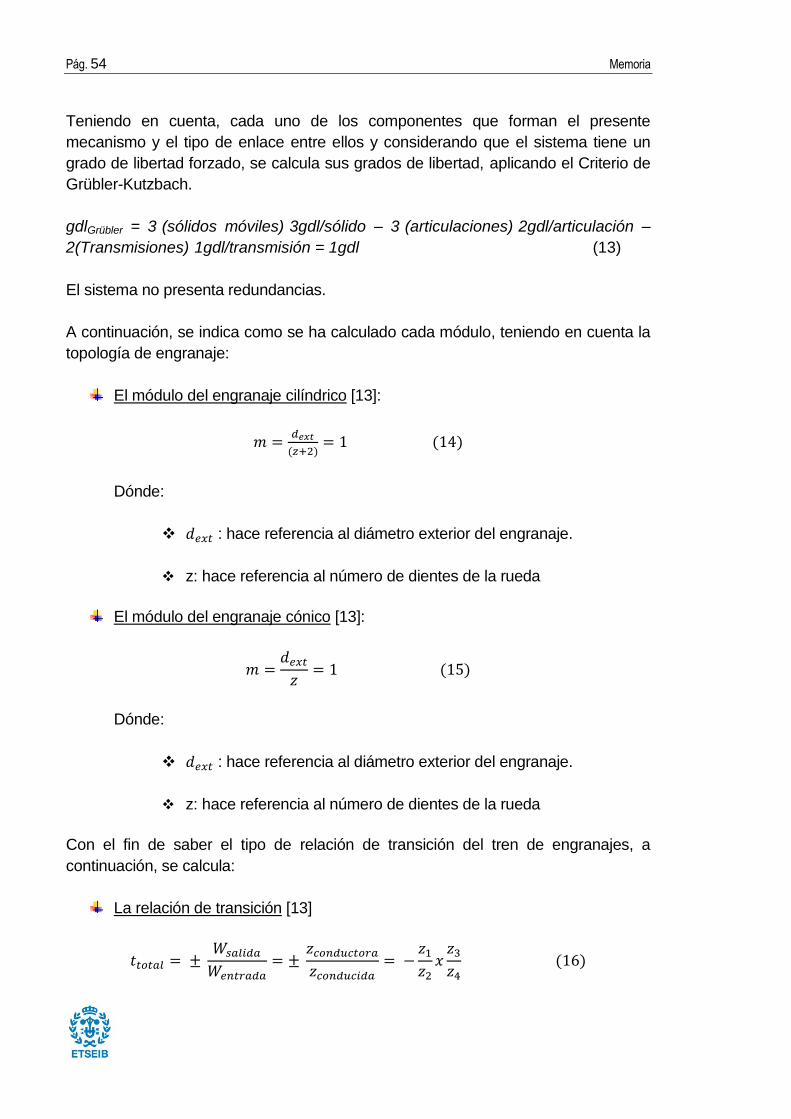
A continuación, se indica como se ha calculado cada módulo, teniendo en cuenta la
topología de engranaje:
El módulo del engranaje cilíndrico [13]:
𝑚 =𝑑𝑒𝑥𝑡
(𝑧+2)= 1 (14)
Dónde:
𝑑𝑒𝑥𝑡 : hace referencia al diámetro exterior del engranaje.
z: hace referencia al número de dientes de la rueda
El módulo del engranaje cónico [13]:
𝑚 =𝑑𝑒𝑥𝑡
𝑧= 1 (15)
Dónde:
𝑑𝑒𝑥𝑡 : hace referencia al diámetro exterior del engranaje.
z: hace referencia al número de dientes de la rueda
Con el fin de saber el tipo de relación de transición del tren de engranajes, a
continuación, se calcula:
La relación de transición [13]
𝑡𝑡𝑜𝑡𝑎𝑙 = ± 𝑊𝑠𝑎𝑙𝑖𝑑𝑎
𝑊𝑒𝑛𝑡𝑟𝑎𝑑𝑎= ±
𝑧𝑐𝑜𝑛𝑑𝑢𝑐𝑡𝑜𝑟𝑎
𝑧𝑐𝑜𝑛𝑑𝑢𝑐𝑖𝑑𝑎= −
𝑧1
𝑧2𝑥
𝑧3
𝑧4 (16)

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 55
𝑡𝑡𝑜𝑡𝑎𝑙 = ± 𝑊𝑠𝑎𝑙𝑖𝑑𝑎
𝑊𝑒𝑛𝑡𝑟𝑎𝑑𝑎= −
20
40−
20
40= −
1
4= 0,25 < 1 → 𝑡𝑟𝑎𝑛𝑠𝑚𝑖𝑠𝑖ó𝑛 𝑟𝑒𝑑𝑢𝑐𝑡𝑜𝑟𝑎
z1: hace referencia al número de dientes del piñón cónico
z2: hace referencia al número de dientes de la rueda cónica
z3: hace referencia al número de dientes del piñón cilíndrico
z4: hace referencia al número de dientes de la rueda cilíndrica
Por otra parte, se comprueba que los dos engranajes tienen el mismo número de
dientes, y los ángulos de los dos conos de paso suman 90º.
𝑡𝑎𝑛δ𝐴 =𝑧𝐴
𝑧𝑏=
𝑧1
𝑧2=
20
40= 0,5 → δ𝐴 = δ1 = 26,56° (17)
𝑡𝑎𝑛δ𝐵 =𝑧𝐵
𝑧𝐴=
𝑧2
𝑧1=
40
20= 2 → δ𝐵 = δ2 = 63,34° (18)
δ1 + δ2 = 90° (19)
A continuación, se muestra su esquema de forma independiente identificando
cada uno de sus parámetros geométricos.
Figura 55. Esquema mecanismo exprimidor eléctrico

Pág. 56 Memoria
Por último, se muestran los resultados obtenidos después de someter al mecanismo
a un análisis de movimiento. En concreto, para el presente mecanismo, se ha
considerado un motor rotatorio en la rueda cónica z1 dientes a velocidad constate,
en concreto a 100rpm. A continuación, se muestran los gráficos extraídos que se
han considerado de interés:
Gráfico velocidad angular del engranaje cilíndrico de salida que corresponde
a la velocidad del cono del exprimidor.
Figura 56. Gráfico donde se muestra la velocidad angular del engranaje cilíndrico
Como se puede ver en la Figura 56, debido a una relación de transmisión
reductora de 0,25 la velocidad de salida del engranaje cilíndrico que corresponde
a la velocidad del cono del exprimidor es de 25 rpm.
6.1.6. Mecanismo Gato Hidráulico de patín
El sexto mecanismo escogido ha sido un gato hidráulico, un mecanismo
básicamente utilizado en los talleres para la reparación y el mantenimiento de los
coches, facilitando levantarlos y resistiendo grandes cargas.
A continuación, se muestra el mecanismo escogido (Figura 57) y el modelo virtual
(Figura 58). En este último, se indican cada uno de sus componentes.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 57
Figura 57. Mecanismo Gato hidráulico de patín (modelo real)
Figura 58. Mecanismo Gato hidráulico de patín (modelo virtual)
Cuando se coloca al gato hidráulico debajo de un automóvil y de forma manual se
activa la palanca ejerciendo un movimiento (Figura 58), arriba y abajo, del pistón
del cilindro principal (de pequeño diámetro) y este cámara hidráulica se conecta
con el cilindro secundario de mayor diámetro que transmite la fuerza ejercida
mediante fluido hidráulico sobre el pistón secundario de mayor dimensión
logrando una mayor fuerza de salida en su extremo que a su vez da lugar a un
movimiento de mayor recorrido y permite accionar el brazo de elevación para
levantar un coche. [25]
Pág. 58 Memoria
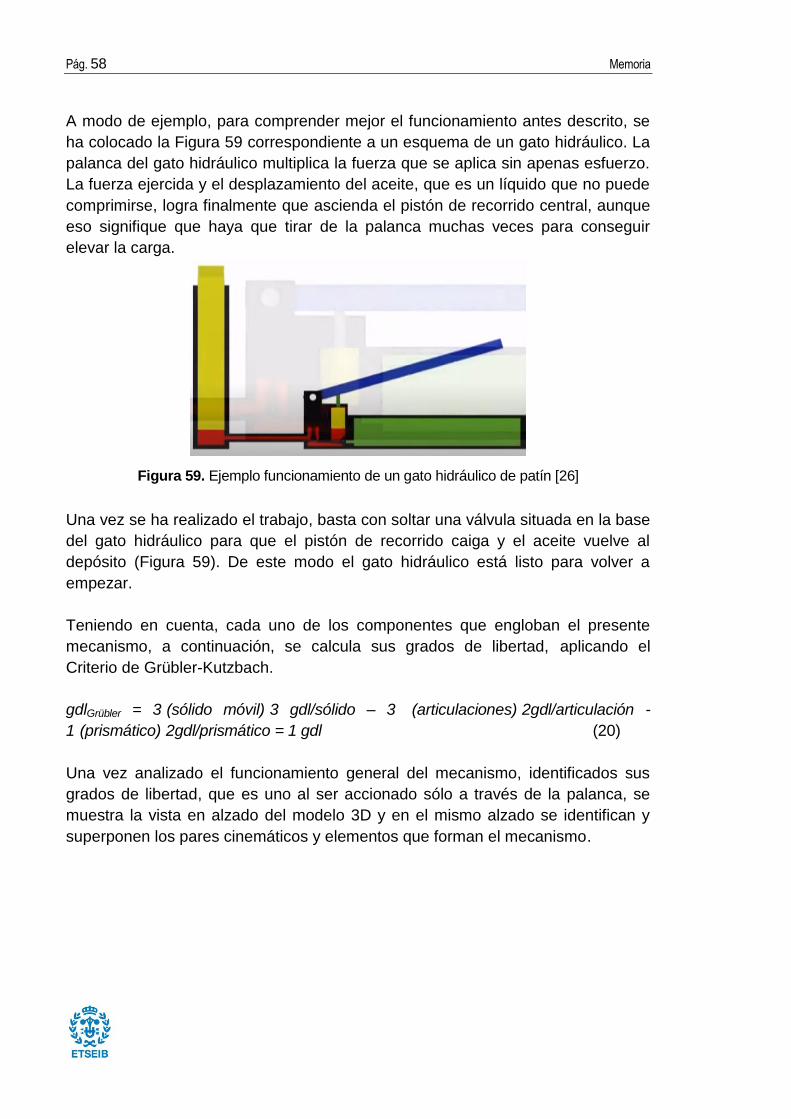
A modo de ejemplo, para comprender mejor el funcionamiento antes descrito, se
ha colocado la Figura 59 correspondiente a un esquema de un gato hidráulico. La
palanca del gato hidráulico multiplica la fuerza que se aplica sin apenas esfuerzo.
La fuerza ejercida y el desplazamiento del aceite, que es un líquido que no puede
comprimirse, logra finalmente que ascienda el pistón de recorrido central, aunque
eso signifique que haya que tirar de la palanca muchas veces para conseguir
elevar la carga.
Figura 59. Ejemplo funcionamiento de un gato hidráulico de patín [26]
Una vez se ha realizado el trabajo, basta con soltar una válvula situada en la base
del gato hidráulico para que el pistón de recorrido caiga y el aceite vuelve al
depósito (Figura 59). De este modo el gato hidráulico está listo para volver a
empezar.
Teniendo en cuenta, cada uno de los componentes que engloban el presente
mecanismo, a continuación, se calcula sus grados de libertad, aplicando el
Criterio de Grübler-Kutzbach.
gdlGrübler = 3·(sólido móvil)·3 gdl/sólido – 3· (articulaciones)·2gdl/articulación -
1·(prismático)·2gdl/prismático = 1 gdl (20)
Una vez analizado el funcionamiento general del mecanismo, identificados sus
grados de libertad, que es uno al ser accionado sólo a través de la palanca, se
muestra la vista en alzado del modelo 3D y en el mismo alzado se identifican y
superponen los pares cinemáticos y elementos que forman el mecanismo.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 59
Figura 60. Alzado mecanismo Gato hidráulico de patín
Teniendo en cuenta, cada uno de los componentes que engloban el presente
mecanismo y mostrando la representación esquemática simplificada (Figura 61),
que no considera la palanca con el cilindro pequeño. Se representan los
elementos a partir del cilindro hidráulico secundario de mayor diámetro y el resto
del mecanismo de barras.
A continuación, se muestra su esquema de forma independiente identificando
cada uno de sus parámetros y variables geométricas.
Figura 61. Esquema Gato hidráulico
Por último, se muestran los resultados obtenidos después de someter al
mecanismo a un análisis de movimiento. En concreto, para el presente
mecanismo, se ha considerado un motor lineal controlado por distancia y tiempo.

Pág. 60 Memoria
En concreto, se ha impuesto un movimiento de 5mm en 3 segundos. A
continuación, se muestran los gráficos extraídos que se han considerado de
interés:
Gráfico de desplazamiento lineal del punto D:
Figura 62. Gráfico que muestra el desplazamiento lineal punto D
Como se puede ver en la Figura 62, verdaderamente el punto D se desplaza 5mm
en 3 segundos.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 61
7. Costes del proyecto
A continuación, se estiman los costes que han supuesto el desarrollo del presente
trabajo. El coste económico del proyecto tiene en cuenta los costes de equipos, de
licencias de software usado y el tiempo de realización del proyecto por parte del
estudiante.
El desarrollo del proyecto ha llevado 6 meses de trabajo y el coste total es de
27.268,94 €
7.1. Tipos de gastos
7.1.1. Coste del personal
El proyecto ha sido desarrollado por una ingeniera que trabaja a tiempo completo.
El proyecto tiene destinado un total de 12 créditos, con una destinación de 25
horas por crédito. Es un total de 300 horas, aunque, realmente las horas
invertidas han sido más, se calcula que se han necesitado 510 horas. Los
honorarios de un ingeniero son de 40 €/hora.
A continuación, se desglosa el tiempo total invertido en las tareas realizadas para el
desarrollo del proyecto.
Tareas Tiempo invertido en horas
Estudio estructural, caracterización,
estudio geométrico y cinemático 100 h
Modelación en 3D 200 h
Animación en 3D 70 h
Análisis del movimiento 70 h
Documentación 70 h
Redacción 70 h
Total 580 h
Tabla 5. Descomposición de las horas invertidas en el desarrollo del proyecto
Por tanto, el coste total de mano de obra para desarrollar el Trabajo Final de Grado
ha sido de:

Pág. 62 Memoria
𝐶𝑜𝑠𝑡𝑒 𝑒𝑛 𝑝𝑒𝑟𝑠𝑜𝑛𝑎𝑙 = 580 ℎ𝑜𝑟𝑎𝑠 ·40€
ℎ𝑜𝑟𝑎= 23.200 € (21)
7.1.2. Coste del material
El coste de material utilizado se ha dividido en dos secciones: material
inventariable y material fungible.
Material inventariable: son los bienes que no se agotan tras su uso.
Tienen una vida superior a un año y con un precio superior o igual a un
precio determinado. El valor del bien debe ser superior a 150€.
Para desarrollar los modelos virtuales es necesario el uso de un ordenador.
En este caso, se ha utilizado un portátil SONY VAIO de un coste
aproximado de 1000€. Teniendo en cuenta que el ordenador se ha usado
completamente durante los 6 meses y su vida útil es de aproximadamente
4 años, el coste asciende a:
𝑃𝑜𝑟𝑐𝑒𝑛𝑡𝑎𝑗𝑒 𝑑𝑒 𝑣𝑖𝑑𝑎 𝑑𝑒𝑙 𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑜𝑟 =6 𝑚𝑒𝑠𝑒𝑠
4 𝑎ñ𝑜𝑠 · 12𝑚𝑒𝑠𝑒𝑠
𝑎ñ𝑜
= 0,125 % (22)
𝐶𝑜𝑠𝑡𝑒 𝑑𝑒 𝑢𝑠𝑜 𝑑𝑒𝑙 𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑜𝑟 = 0,125 · 1000 € = 125 € (23)
Material fungible: son todos los bienes que se gastan con el uso; en este
caso es el material de oficina: material de escritura –incluyendo el papel-,
impresiones, portapapeles, etc. Esta partida asciende a un total de 50€.
Software informático: para el presente proyecto ha sido necesario el uso
de programas informáticos privados. A continuación, se enumeran:
Software Precio Mensual Precio para 6 meses
Microsoft Office 8,25 €/mes 51 €
SolidWorks 2019 550 €/mes 3.300 €
Adobe Illustrator 60,49 €/mes 362,94 €
Total 3.713,94 €
Tabla 6. Coste software informático

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 63
Conexión a internet: para el presente proyecto se ha necesitado del uso
de internet durante todo el proceso de desarrollo, ya sea para descargar
software o paquetes/bibliotecas de desarrollo, o para consultar
documentación importante.
Una tarifa de internet de fibra óptica tiene un coste aproximado de 30 €/mes, por
lo que el coste de 6 meses asciende a:
Coste del uso de internet = 30€
meses· 6 meses = 180 € (24)
7.2. Resumen de costes
En definitiva, El coste total para desarrollar el proyecto ha sido de 27.268,94 €
Concepto Coste [ € ]
Personal 23.200 €
Material inventariable 125 €
Material fungible 50 €
Software 4420 3.713,94 €
Internet 105 180 €
TOTAL 27.268,94 €
Tabla 7. Coste total proyecto

Pág. 64 Memoria
Conclusiones
Una vez finalizado el presente proyecto se concluye que ha sido posible alcanzar
el objetivo principal de este, ya que con el mismo, se han creado 6 modelos
virtuales a partir de mecanismos reales, así como las animaciones de dicho
funcionamiento, y los esquemas de símbolos de los mecanismos, que pueden ser
utilizados como material didáctico para el proceso de enseñanza-aprendizaje de
la asignatura de Teoría de Máquinas y Mecanismos del Grado de Ingeniería en
Tecnologías Industriales (GETI) impartido en la ETSEIB. Asimismo, se han
realizado sus animaciones en 3D y un pequeño estudio del movimiento para
comprobar el correcto funcionamiento de los mecanismos animados.
En la parte de modelación y animación con el SolidWorks, se señala, aunque se
consiguió animar el mecanismo de la bomba de pedal con el muelle torsional, no
ha sido posible realizar el estudio del movimiento este. No obstante, se tiene
previsto profundizar en próximos trabajos.
El logro del objetivo principal ha sido posible gracias a que se han cumplido los
objetivos secundarios:
Se ha realizado un estudio del Estado del arte relacionado con los recursos
virtuales utilizados en la enseñanza de Teoría de Máquinas y Mecanismos en
universidades españolas, es decir, se han mostrado programas utilizados
para la creación de los modelos y las simulaciones del funcionamiento de
mecanismos y máquinas.
Se ha fundamentado la elección de los mecanismos a modelar y simular,
siguiendo básicamente dos criterios: Mecanismos considerados de estructura
sencilla y habitualmente presentes en la vida cotidiana, dentro los que han
elegido: a) Saca corchos de brazos, b) Flexo articulado de mesa y c) Tornillo
de banco. Y Mecanismos de estructura compleja y que se consideran de
interés mecánico, donde se han elegido: d) Gato hidráulico de patín, e)
Bomba de hinchar de pedal y f) Exprimidor eléctrico.
Al analizar las características de los mecanismos se han determinado en el
caso de los elementos resortes tanto lineal como torsional, su constante
elástica. En el caso de las transmisiones dentadas, se ha determinado los
módulos, que se han normalizados y también el valor de las relaciones de
transmisión y en el caso de los tornillos se ha determinado su métrica y su
paso.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pàg. 65
Durante el proceso de modelación con el SolidWorks, se han detallado los
aspectos considerados más relevantes del proceso de modelación, en
particular, de sólidos como las ruedas dentadas, los resortes y los husillos
roscados.
Respecto a la animación de los mecanismos con el módulo Motion de
SolidWorks, se han indicado los básicos de dicho proceso. Se aportan los
videos de dichas animaciones en formato .mp4, debido a que este tipo de
formato es compatible con todos los reproductores multimedia existentes.
Además, es compatible con los dispositivos móviles y tiene mejor calidad que
otros formatos como por ejemplo .AVI [27]
Se ha realizado el coste de proyecto. Este asciende a un total de tanto
27.268,94 €, siendo el importe mayor la partida asociada a la horas de coste
del personal.
Por último, comentar que el presente proyecto, me ha ayudado a potenciar los
conocimientos que tenía relacionados con el ámbito de la ingeniería mecánica.
Asimismo, he podido crecer dentro del ámbito del diseño en 3D, enriqueciéndome
de nuevas herramientas, habilidades y utilizando módulos que previamente no había
tenido la oportunidad de utiliza.

Pág. 66 Memoria
Agradecimientos
En primera instancia, me gustaría agradecer el presente proyecto a mi tutor, Enrique
Zayas por haberme ayudado desde el inicio a llevar a cabo el proyecto. Ha sido un
pilar muy importante en la presente aventura y estoy muy agradecida por la
confianza que ha tenido en mí y su incondicionalidad. Asimismo, gracias a su
colaboración, no perdí la esperanza de conseguir todos los objetivos del presente
trabajo y me dio muchos consejos a la hora de encarar y llevar a cabo el presente
proyecto.
Seguidamente, me gustaría darle mi agradecimiento a la profesora Arantza Villa.
Gracias a su colaboración, no perdí la esperanza de conseguir todos los objetivos
del presente trabajo y me dio muchos consejos a la hora de modelar, animar objetos
mediante el software SolidWorks.
Por último, agradecer a mi familia y amigos, por su soporte moral e
incondicionalidad a lo largo de toda esta aventura. Sin ellos, no hubiera conseguido
finalizar esta etapa.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pág. 67
Bibliografía
Referencias bibliográficas
[1] Bravo Ramos, Juan L. Los medios didácticos en la enseñanza universitaria.
ICE. Universidad Politécnica de Madrid. 1998.
[http://www.ice.upm.es/wps/jlbr/Documentacion/Libros/tecnorec.pdf]
[2] Merino, D. Recursos virtuales de apoyo a la enseñanza y aprendizaje de Teoría
de Máquinas y Mecanismos. Trabajo Final de Grado. Universitat Politècnica de
Catalunya (UPC).2019.
[3] Horas, C. Recursos didácticos para la enseñanza y aprendizaje de la
asignatura “teoría de máquinas y mecanismos”: prototipos virtuales y reales.
Trabajo Final de Grado. Universitat Politècnica de Catalunya (UPC).2019.
[4] Garcia, Aitor. Diseño, Fabricación, Motorización y Control de mecanismos
diversos a utilizar como recursos didácticos en las asignaturas Teoría de
Máquinas y Mecanismos y Proyecto II. Universitat Politècnica de Catalunya
(UPC).2019.
[5] Simulación Mecanismo a-z-1111 con Cosmos Motion - 3 de 3. Divulgación de
las actividades científicas, tecnológicas y artísticas ocurridas en los tres campus
de la UPV. Universitat Politècnica de Valencia.
[https://www.upv.es/visorv/media/7f8965f0-da3d-11e6-b4b2-dbc6a406a704/c].
[6] ¿Cómo se usa WinMecC?. Área de ingeniería mecánica de la Universidad de
Málaga.
[http://winmecc.uma.es/como-se-usa-winmecc.php?PHPSESSID=8018
013e95dc1e343522cd79f2ce8946].
[7] Programa de análisis de mecanismos. Página docente del Departament
d’Enginyeria Mecànica de la Universitat Politècnica de Cataluña.
[https://em.upc.edu/ca/docencia/pagines-docents/etseib-tmm/programa-
danalisi-de-mecanismes.-pam].
[8] Jordi, L., Cardona, S. y Puig, J. “TildyWiki Teoria de Màquines i Mecanismes ETSEIB”.
Soporte dinámico para el material docente del profesorado de TMM en la ETSEIB.
2020.

Pàg. 68 Memoria
[9] Vázquez, F. easyworks (9 de agosto de 2019). ¿Qué es SOLIDWORKS
Toolbox y cómo nos puede ayudar?”
[https://easyworks.es/solidworks-toolbox-nos-puede-ayudar/]
[10] Chevalier, A. Engranages concurrents Guide du dissenateur industriel. Ed.
Hachette Technique. 2004. pp. 300.
[11] Guaycochea, R; Greco, H. y Rodrigo, R. Mecanismos y elementos de
máquinas. TPN Nº 3 “Problemas Resueltos De Engranajes Cilíndricos Dientes
Rectos”. FICA. Universidad Nacional de San Luis. 2017.
[https://www.studocu.com/es-ar/document/universidad-nacional-de-san-luis/
mecanismos-y-elementos-de-maquinas/trabajos-practicos-obligatorios/tpn-3-
engranajes-rectos-problemas-resueltos-2017/3190851/view].
[12] Cardona, S., & Clos, D. Teoría de Máquinas (Primera Edición en Castellano).
Barcelona: Ed. UPC. 2001.
[13] Chevalier, A. Engranages concurrents Guide du dissenateur industriel. Ed.
Hachette Technique. 2004. pp. 300-301.
[14] CADCAM para todos (17 de junio de 2019). “como hacer un resorte en
solidworks 2019”. Youtube.
[https://www.youtube.com/watch?v=HEteArRbMEI].
[15] Dassault systemes. “Crear animaciones básicas”
[http://help.solidworks.com/2019/spanish/SolidWorks/motionstudies/t_creating_
basic_animations_motion.htm?id=618c2f77373b46a9a5f93b2547696237].
[16] Dassault systemes. “Introducción a Estudios de movimiento”
[http://help.solidworks.com/2019/spanish/SolidWorks/motionstudies/c_introducti
on_to_motion_studies.htm].
[17] Ragan, J. ( 14 de marzo de 2015). “Solidworks motion analysis catapult
simulation”. Youtube.
[https://www.youtube.com/watch?v=L2DHDgn4hqc].
[18] Dassault Systèmes SolidWorks Corporation. Motion Sim Student WB 2011
ESP. pp10.

Modelos virtuales de mecanismos diversos: Modelación, simulación y análisis mediante SolidWorks Pág. 69
[19] Norton, Robert L. Diseño de máquinas (Primera Edición en Castellano).
Editorial Prentice Hall. México, 1999. pp. 713.
[20] ¿Qué es un Tornillo de banco y qué Tipos Existen?
[https://www.bodegasbianchi.com.ar/blogs/blog/que-es-un-sacacorchos-y-que-
tipos-existen].
[21] ¿Qué es un Sacacorchos y qué Tipos Existen?
[https://www.tecnitool.es/tornillos-de-banco/].
[22] Cómo elegir flexos. Leroy Merlin.(2019)
[https://www.leroymerlin.es/iluminacion/flexos/como-elegir-flexos].
[23] ¿Qué es una bomba de pedal de pie y qué tipos hay?
[https://demountainbike.com/accesorios-bicicletas/bombas-inflado/].
[24] ¿Qué es un exprimidor eléctrico y qué tipos hay?
[https://es.slideshare.net/tecnoparador2/exprimidor-12925934].
[25] ANDRES199896. (27 abril de 2020). “[ Solid Edge 2020 / Fusion 360 ]
Generative Design Gato Hidráulico”. Youtube.
[https://www.youtube.com/watch?v=t0kizl5a6dM].
[26] Cerezo, A. alfonsocerezo. “Gato hidraúlico”. Youtube
[https://www.youtube.com/watch?v=bic6eSIWevQ]
[27] Klarzo, T. (14 de Enero de 2021) “¿Cuáles son las diferencias entre AVI y
MP4?”. ANYMP4
[https://www.anymp4.com/es/glossary/avi-vs-mp4.html]

Pàg. 70 Memoria





























