Embed Size (px)
Citation preview
MODELOWANIE INŻYNIERSKIE nr 46, ISSN 1896-771X
83
MODELOWANIE I STEROWANIE
Z SIŁOWYM SPRZĘŻENIEM ZWROTNYM
ELEKTROHYDRAULICZNEGO
MANIPULATORA W ŚRODOWISKU
WIRTUALNYM
Piotr Owczarek1a, Dominik Rybarczyk1b, Frederik Stefański1c
1Zakład Urządzeń Mechatronicznych, Politechnika Poznańska e-mail: a [email protected], [email protected], cfrederik.stefań[email protected]
Streszczenie Artykuł opisuje zastosowanie technik modelowania cyfrowego i wizualizacji 3D pracy manipulatora z napędami elektrohydraulicznymi, sterowanego za pomocą dżojstika z siłowym sprzężeniem zwrotnym. Obiektem badań jest manipulator o nietypowej, równoległej kinematyce, który został zamodelowany i umieszczony w środowisku wirtualnym. Wirtualny manipulator odzwierciedla ruchy będącego w pewnej odległości od operatora rzeczywistego urządzenia, odczytując jego współrzędne konfiguracyjne poprzez komunikację bezprzewodową. Wirtualne środowisko umożliwia wykrywanie kolizji oraz oporów ruchu przesuwanej przeszkody. Do operatora dostarczana jest informacja z wizyjnego i siłowego sprzężenia zwrotnego. Zaprojektowane środowisko może zostać wykorzystane jako symulator do nauki manipulowania urządzeniami z napędami elektrohydraulicznymi.
MODELING AND CONTROLLING
THE ELECTROHYDRAULIC MANIPULATOR WITH FORCE
FEEDBACK IN A VIRTUAL ENVIRONMENT
Summary The article describes the use of the digital modeling and 3D visualization of electrohydraulic manipulator work, controlled by a haptic joystick (with force feedback). The aim of the research is modeling and control of the manipulator with untypical parallel kinematics in a virtual environment. Virtual manipulator retrace movements of real manipulator in distant form operator. The coordinates of configuration manipulator was reading and sending by the wireless communication. Virtual environment allows collision detection and obstacle friction motion. An information about the environment is based on force and visual feedback. Designed environment can be used as a simulator to learn to manipulate devices with electrohydraulic drives.
1. WSTĘP
W dzisiejszych czasach wiele urządzeń takich jak roboty, dźwigi czy też koparki są projektowane, tak aby umożliwić ich łatwiejsze sterowanie przez operatora. Prowadzonych jest szereg badań ukierunkowanych na budowę interfejsów komunikacji
pomiędzy człowiekiem a maszyną. Typowe układy sterowania w większości nowoczesnych maszyn składają się z dżojstików, zaworów elektrohydraulicznych, kart sterujących zaworami oraz układów wykonawczych (siłowniki, silniki
MODELOWANIE I STEROWANIE Z SIŁOWYM SPRZĘŻENIEM ZWROTNYM …
84
hydrauliczne). Operator, jako sprzężenie zwrotne, wykorzystuje w nich jedynie wzrok. W skrajnych przypadkach, gdy dochodzi do kolizji maszyny z nieprzewidzianym obiektem, jest to słuch. W niniejszej pracy autorzy proponują wykorzystanie do sterowania dżojstika haptycznego z siłowym sprzężeniem zwrotnym [1][2], połączony z wirtualnym środowiskiem, w którym zamodelowano manipulator z napędami elektrohydraulicznymi. Ruch dżojstika jest odwzorowywany przez manipulator w środowisku wirtualnym. W środowisku tym zaimplementowano mechanizm wykrywania kolizji urządzenia z elementami otoczenia. Możliwość dowolnego ograniczania przestrzeni roboczej manipulatora może okazać bardzo przydatna w przypadku prac wykonywanych, gdy operator nie ma kontaktu wzrokowego z obiektem, np. przy oczyszczaniu rowów, pogłębianiu koryt rzecznych czy też różnego rodzaju pracach prowadzonych pod wodą.
2. STANOWISKO BADAWCZE
2.1 BUDOWA MANIPULATORA Z NAPĘDAMI ELEKTROHYDRAULICZNYMI
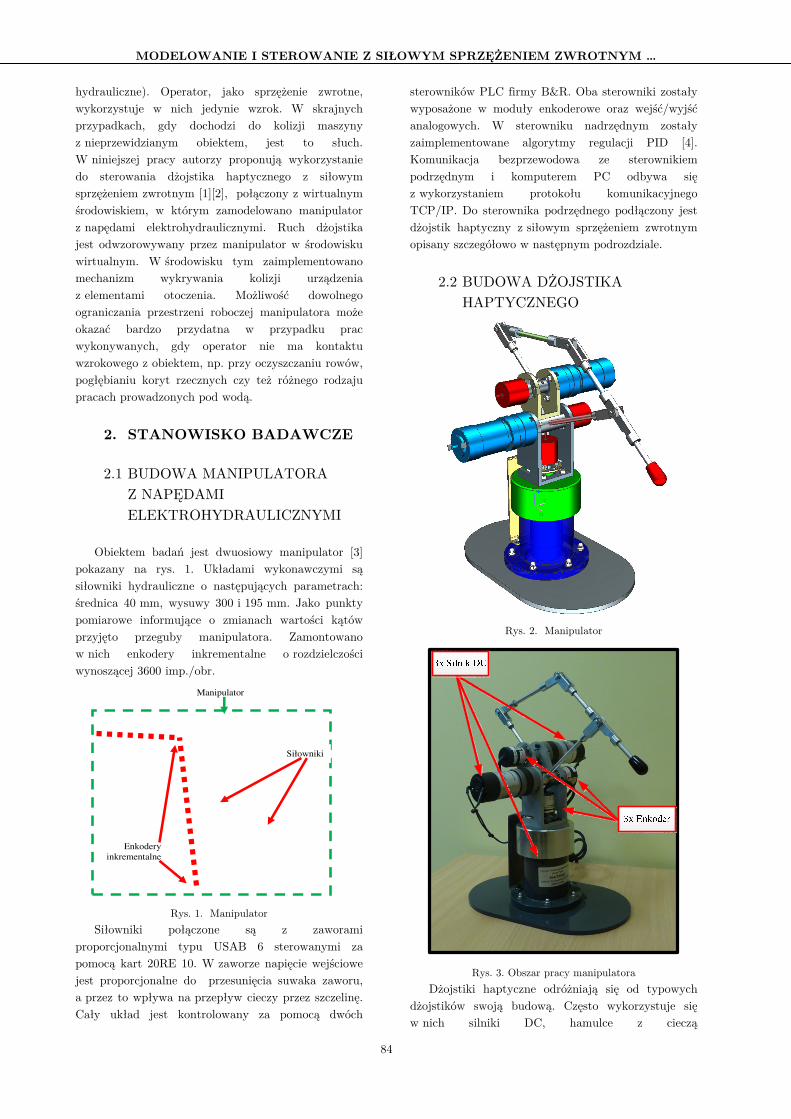
Obiektem badań jest dwuosiowy manipulator [3]
pokazany na rys. 1. Układami wykonawczymi są siłowniki hydrauliczne o następujących parametrach: średnica 40 mm, wysuwy 300 i 195 mm. Jako punkty pomiarowe informujące o zmianach wartości kątów przyjęto przeguby manipulatora. Zamontowano w nich enkodery inkrementalne o rozdzielczości wynoszącej 3600 imp./obr.
Enkodery
inkrementalne
Siłowniki
Manipulator
Rys. 1. Manipulator
Siłowniki połączone są z zaworami proporcjonalnymi typu USAB 6 sterowanymi za pomocą kart 20RE 10. W zaworze napięcie wejściowe jest proporcjonalne do przesunięcia suwaka zaworu, a przez to wpływa na przepływ cieczy przez szczelinę. Cały układ jest kontrolowany za pomocą dwóch
sterowników PLC firmy B&R. Oba sterowniki zostały wyposażone w moduły enkoderowe oraz wejść/wyjść analogowych. W sterowniku nadrzędnym zostały zaimplementowane algorytmy regulacji PID [4]. Komunikacja bezprzewodowa ze sterownikiem podrzędnym i komputerem PC odbywa się z wykorzystaniem protokołu komunikacyjnego TCP/IP. Do sterownika podrzędnego podłączony jest dżojstik haptyczny z siłowym sprzężeniem zwrotnym opisany szczegółowo w następnym podrozdziale.
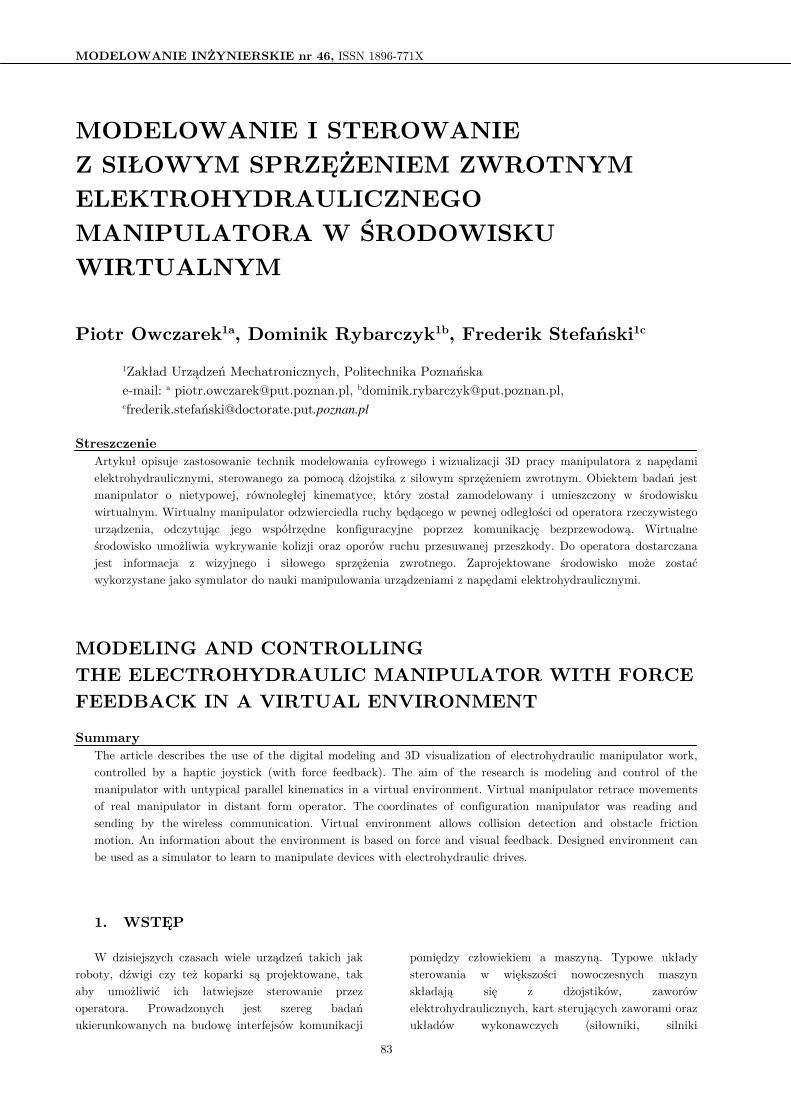
2.2 BUDOWA DŻOJSTIKA HAPTYCZNEGO
Rys. 2. Manipulator
Rys. 3. Obszar pracy manipulatora
Dżojstiki haptyczne odróżniają się od typowych dżojstików swoją budową. Często wykorzystuje się w nich silniki DC, hamulce z cieczą
Piotr Owczarek, Dominik Rybarczyk, Frederik Stefański
85
magnetoreologiczną, hamulce proszkowe lub też inne rozwiązania powodujące generowanie siły oporu. Autorzy niniejszego artykułu zaprojektowali trójosiowy dżojstik (rys. 2), wykorzystując silniki DC 24V z przekładniami planetarnymi o przełożeniu 18:1. Do pomiaru kątów w przegubach zastosowano enkodery inkrementalne o rozdzielczości 360 imp./obr. Kinematyka dżojstika jest zbliżona do kinematyki sterowanego manipulatora (rys. 3).
Operator steruje manipulatorem, obserwując obiekt za pomocą systemu wizyjnego. Dżojstik pracuje w układzie z siłowym sprzężeniem zwrotnym, oddziałując na rękę operatora w momencie zbliżania się końcówki manipulatora do przeszkody. Aby uniknąć kolizji z przeszkodą, autorzy założyli, że siła działająca przeciwnie do przeszkody jest proporcjonalna do odległości pomiędzy końcówką manipulatora a krawędzią przeszkody w ściśle określonej strefie. Ta strefa jest modyfikowana programowo w środowisku wirtualnym.
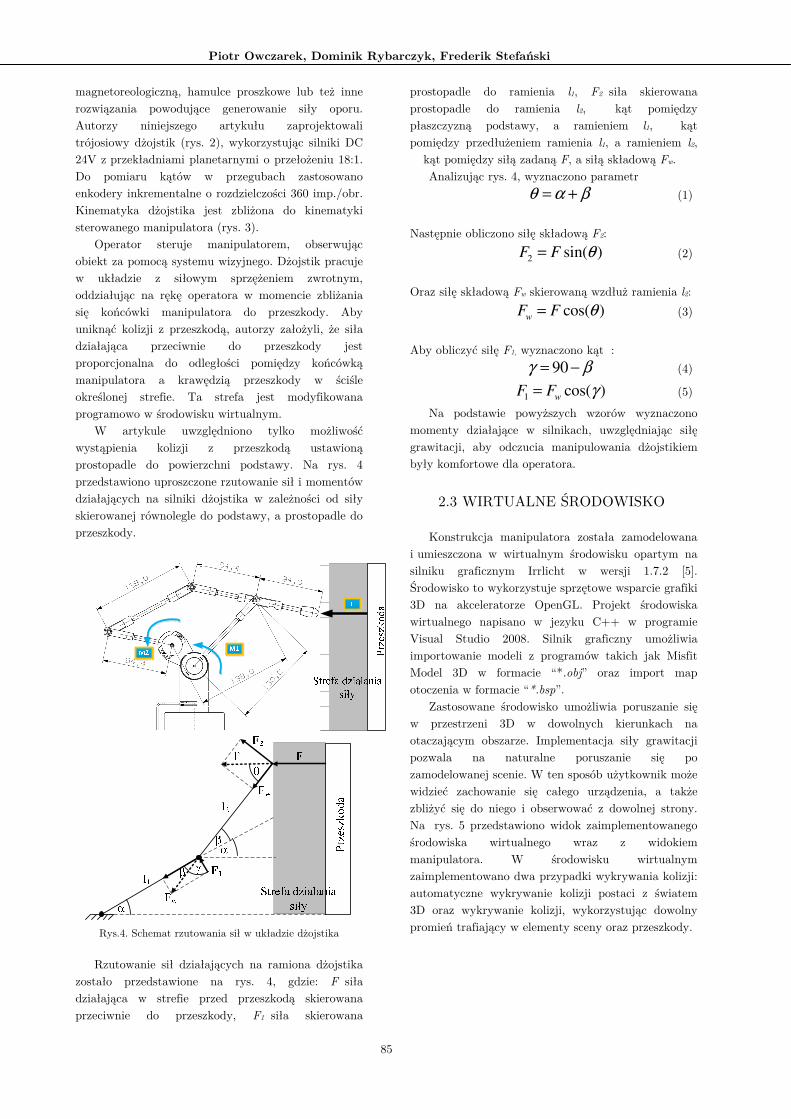
W artykule uwzględniono tylko możliwość wystąpienia kolizji z przeszkodą ustawioną prostopadle do powierzchni podstawy. Na rys. 4 przedstawiono uproszczone rzutowanie sił i momentów działających na silniki dżojstika w zależności od siły skierowanej równolegle do podstawy, a prostopadle do przeszkody.
Rys.4. Schemat rzutowania sił w układzie dżojstika
Rzutowanie sił działających na ramiona dżojstika zostało przedstawione na rys. 4, gdzie: F��siła działająca w strefie przed przeszkodą skierowana przeciwnie do przeszkody, F1��siła skierowana
prostopadle do ramienia l1, F2��siła skierowana prostopadle do ramienia l2, ����kąt pomiędzy płaszczyzną podstawy, a ramieniem l1, ����kąt pomiędzy przedłużeniem ramienia l1, a ramieniem l2, ����kąt pomiędzy siłą zadaną F, a siłą składową Fw.
Analizując rys. 4, wyznaczono parametr �R
θ α β= + (1)
Następnie obliczono siłę składową F2:
2 sin( )F F θ= (2)
Oraz siłę składową Fw skierowaną wzdłuż ramienia l2:
cos( )w
F F θ= (3)
Aby obliczyć siłę F1, wyznaczono kąt R:
90γ β= − (4)
1 cos( )wF F γ= (5)
Na podstawie powyższych wzorów wyznaczono momenty działające w silnikach, uwzględniając siłę grawitacji, aby odczucia manipulowania dżojstikiem były komfortowe dla operatora.
2.3 WIRTUALNE ŚRODOWISKO
Konstrukcja manipulatora została zamodelowana i umieszczona w wirtualnym środowisku opartym na silniku graficznym Irrlicht w wersji 1.7.2 [5]. Środowisko to wykorzystuje sprzętowe wsparcie grafiki 3D na akceleratorze OpenGL. Projekt środowiska wirtualnego napisano w jezyku C++ w programie Visual Studio 2008. Silnik graficzny umożliwia importowanie modeli z programów takich jak Misfit Model 3D w formacie “*.obj” oraz import map otoczenia w formacie “*.bsp”.
Zastosowane środowisko umożliwia poruszanie się w przestrzeni 3D w dowolnych kierunkach na otaczającym obszarze. Implementacja siły grawitacji pozwala na naturalne poruszanie się po zamodelowanej scenie. W ten sposób użytkownik może widzieć zachowanie się całego urządzenia, a także zbliżyć się do niego i obserwować z dowolnej strony. Na rys. 5 przedstawiono widok zaimplementowanego środowiska wirtualnego wraz z widokiem manipulatora. W środowisku wirtualnym zaimplementowano dwa przypadki wykrywania kolizji: automatyczne wykrywanie kolizji postaci z światem 3D oraz wykrywanie kolizji, wykorzystując dowolny promień trafiający w elementy sceny oraz przeszkody.
MODELOWANIE I STEROWANIE Z SIŁOWYM SPRZĘŻENIEM ZWROTNYM …
86
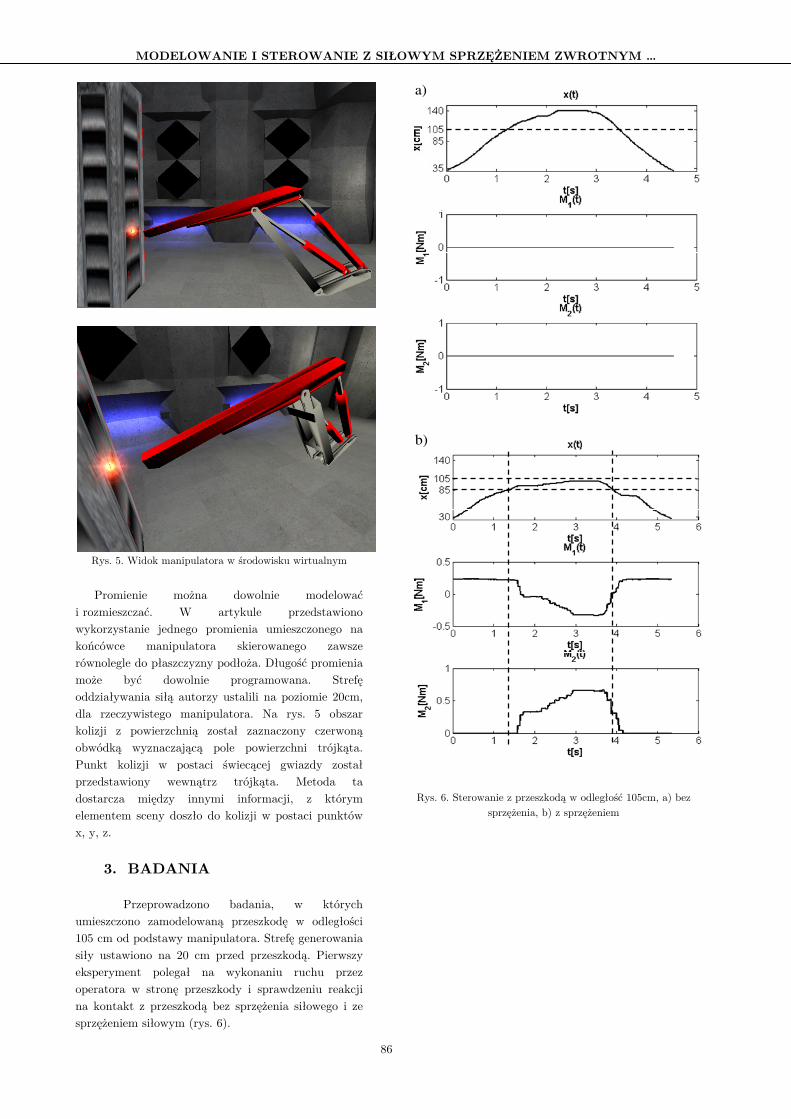
Rys. 5. Widok manipulatora w środowisku wirtualnym
Promienie można dowolnie modelować
i rozmieszczać. W artykule przedstawiono wykorzystanie jednego promienia umieszczonego na końcówce manipulatora skierowanego zawsze równolegle do płaszczyzny podłoża. Długość promienia może być dowolnie programowana. Strefę oddziaływania siłą autorzy ustalili na poziomie 20cm, dla rzeczywistego manipulatora. Na rys. 5 obszar kolizji z powierzchnią został zaznaczony czerwoną obwódką wyznaczającą pole powierzchni trójkąta. Punkt kolizji w postaci świecącej gwiazdy został przedstawiony wewnątrz trójkąta. Metoda ta dostarcza między innymi informacji, z którym elementem sceny doszło do kolizji w postaci punktów x, y, z.
3. BADANIA
Przeprowadzono badania, w których umieszczono zamodelowaną przeszkodę w odległości 105 cm od podstawy manipulatora. Strefę generowania siły ustawiono na 20 cm przed przeszkodą. Pierwszy eksperyment polegał na wykonaniu ruchu przez operatora w stronę przeszkody i sprawdzeniu reakcji na kontakt z przeszkodą bez sprzężenia siłowego i ze sprzężeniem siłowym (rys. 6).
a)
b)
Rys. 6. Sterowanie z przeszkodą w odległość 105cm, a) bez sprzężenia, b) z sprzężeniem
Piotr Owczarek, Dominik Rybarczyk, Frederik Stefański
87
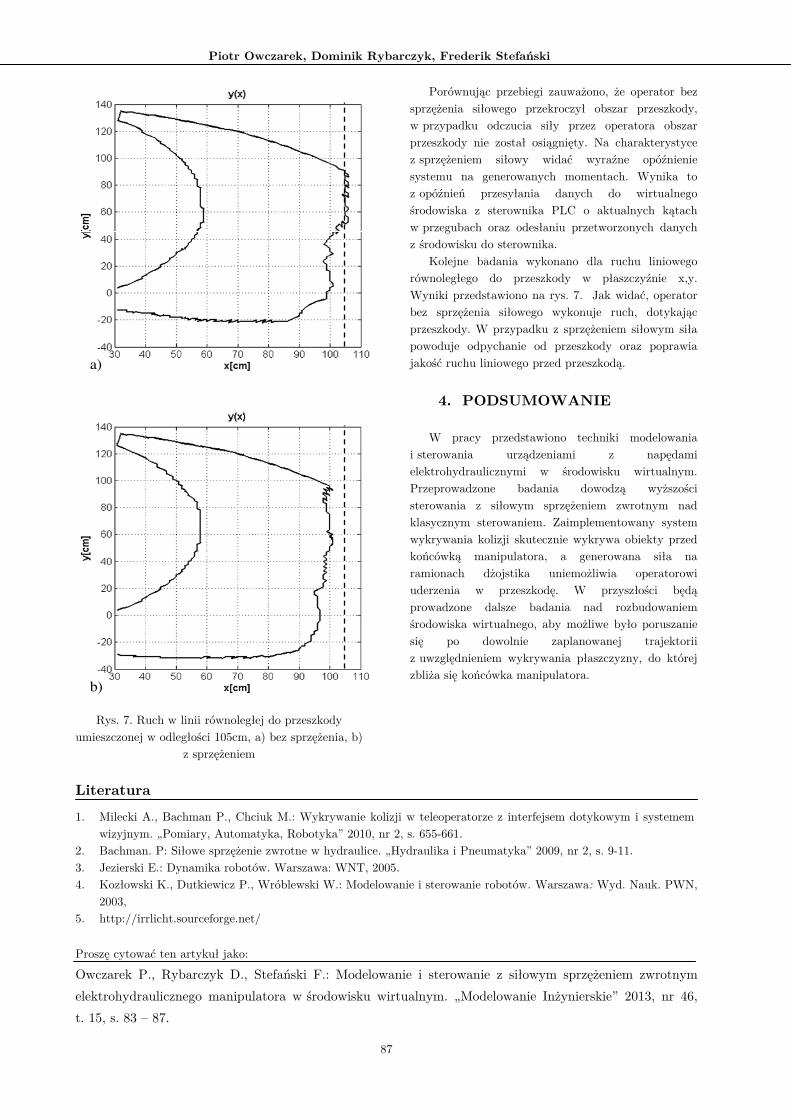
a)
b)
Rys. 7. Ruch w linii równoległej do przeszkody umieszczonej w odległości 105cm, a) bez sprzężenia, b)
z sprzężeniem
Porównując przebiegi zauważono, że operator bez sprzężenia siłowego przekroczył obszar przeszkody, w przypadku odczucia siły przez operatora obszar przeszkody nie został osiągnięty. Na charakterystyce z sprzężeniem siłowy widać wyraźne opóźnienie systemu na generowanych momentach. Wynika to z opóźnień przesyłania danych do wirtualnego środowiska z sterownika PLC o aktualnych kątach w przegubach oraz odesłaniu przetworzonych danych z środowisku do sterownika.
Kolejne badania wykonano dla ruchu liniowego równoległego do przeszkody w płaszczyźnie x,y. Wyniki przedstawiono na rys. 7. Jak widać, operator bez sprzężenia siłowego wykonuje ruch, dotykając przeszkody. W przypadku z sprzężeniem siłowym siła powoduje odpychanie od przeszkody oraz poprawia jakość ruchu liniowego przed przeszkodą.
4. PODSUMOWANIE
W pracy przedstawiono techniki modelowania i sterowania urządzeniami z napędami elektrohydraulicznymi w środowisku wirtualnym. Przeprowadzone badania dowodzą wyższości sterowania z siłowym sprzężeniem zwrotnym nad klasycznym sterowaniem. Zaimplementowany system wykrywania kolizji skutecznie wykrywa obiekty przed końcówką manipulatora, a generowana siła na ramionach dżojstika uniemożliwia operatorowi uderzenia w przeszkodę. W przyszłości będą prowadzone dalsze badania nad rozbudowaniem środowiska wirtualnego, aby możliwe było poruszanie się po dowolnie zaplanowanej trajektorii z uwzględnieniem wykrywania płaszczyzny, do której zbliża się końcówka manipulatora.
Literatura
1. Milecki A., Bachman P., Chciuk M.: Wykrywanie kolizji w teleoperatorze z interfejsem dotykowym i systemem wizyjnym. „Pomiary, Automatyka, Robotyka” 2010, nr 2, s. 655-661.
2. Bachman. P: Siłowe sprzężenie zwrotne w hydraulice. „Hydraulika i Pneumatyka” 2009, nr 2, s. 9-11. 3. Jezierski E.: Dynamika robotów. Warszawa: WNT, 2005. 4. Kozłowski K., Dutkiewicz P., Wróblewski W.: Modelowanie i sterowanie robotów. Warszawa: Wyd. Nauk. PWN,
2003, 5. http://irrlicht.sourceforge.net/
Proszę cytować ten artykuł jako:
Owczarek P., Rybarczyk D., Stefański F.: Modelowanie i sterowanie z siłowym sprzężeniem zwrotnym
elektrohydraulicznego manipulatora w środowisku wirtualnym. „Modelowanie Inżynierskie” 2013, nr 46,
t. 15, s. 83 – 87.