Embed Size (px)
Citation preview

MODELS
Data Assimilation (Physical/Interdisciplinary)
A. R. Robinson, P.F.J. Lermusiaux, Harvard Uni-versity, Division of Engineering and Applied Sciences,Department of Earth and Planetary Sciences, 29 Ox-ford Street, Cambridge, MA 02138, USA
Copyright ^ 2001 Academic Press
doi:10.1006/rwos.2001.0404
Introduction
Data assimilation is a novel, versatile methodologyfor estimating oceanic variables. The estimation ofa quantity of interest via data assimilation involvesthe combination of observational data with the un-derlying dynamical principles governing the systemunder observation. The melding of data and dynam-ics is a powerful methodology which makes possibleefRcient, accurate, and realistic estimations other-wise not feasible. It is providing rapid advances inimportant aspects of both basic ocean science andapplied marine technology and operations.
The following sections introduce concepts, de-scribe purposes, present applications to regional dy-namics and forecasting, overview formalism andmethods, and provide a selected range of examples.
Field and Parameter Estimation
Ocean science, and marine technology and opera-tions, require a knowledge of the distribution andevolution in space and time of the properties of thesea. The functions of space and time, or state vari-ables, which characterize the state of the sea underobservation are classically designated as Telds. Thedetermination of state variables poses problems ofstate estimation or Teld estimation in three or fourdimensions. The fundamental problem of oceanscience may be simply stated as follows: given thestate of the ocean at one time, what is the state ofthe ocean at a later time? It is the dynamics, i.e., thebasic laws and principles of oceanic physics, biol-ogy, and chemistry, that evolve the state variablesforward in time. Thus, predicting the present andfuture state of oceanic variables for practical ap-plications is intimately linked to fundamental oceanscience.
A dynamical model to approximate nature con-sists of a set of coupled nonlinear prognostic Reldequations for each state variable of interest. Thefundamental properties of the system appear in theReld equations as parameters (e.g., viscosities, dif-fusivities, representations of body forces, rates ofearth rotation, grazing, mortality, etc.). The initialand boundary conditions necessary for integrationof the equations may also be regarded as para-meters. In principle the parameters of the systemcan be estimated directly from measurements. Inpractice, directly measuring the parameters of theinterdisciplinary (physical-acoustical-optical-biolo-gical-chemical-sedimentological) ocean system is dif-Rcult because of sampling, technical, and resourcerequirements. However, data assimilation providesa powerful methodology for parameter estimationvia the melding of data and dynamics.
The physical state variables are usually the velo-city components, pressure, density, temperature, andsalinity. Examples of biological and chemical statevariables are concentration Relds of nutrients,plankton, dissolved and particulate matter, etc. Im-portant complexities are associated with the vastrange of phenomena, the multitude of concurrentand interactive scales in space and time, and thevery large number of possible biological state vari-ables. This complexity has two essential conse-quences. First, state variable deRnitions relevant tophenomena and scales of interest need to be de-veloped from the basic deRnitions. Second, approx-imate dynamics which govern the evolution of thescale-restricted state variables, and their interactionwith other scales, must be developed from the basicdynamical model equations. A familiar exampleconsists of decomposing the basic ocean Relds intoslower and faster time scales, and shorter and longerspace scales, and averaging over the faster and shor-ter scales. The resulting equations can be adapted togovern synoptic/mesoscale resolution state variablesover a large-scale oceanic domain, with faster andsmaller scale phenomena represented as para-meterized Suctuation correlations (Reynolds stres-ses). There is, of course, a great variety of otherscale-restricted state variables and approximate dy-namics of vital interest in ocean science. We refer toscale-restricted state variables and approximate dy-namics simply as ‘state variables’ and ‘dynamics’.
The use of dynamics is of fundamental import-ance for efRcient and accurate Reld and parameterestimation. Today and in the foreseeable future,
0001
0002
0003
0004
0005
0006
MODELS / Data Asssimilation (Physical/Interdisciplinary) 1
VVCrNPrMDrScanrPadmarRWOS 0404

data acquisition in the ocean is sufRciently difRcultand costly as to make Reld and parameter estimatesby direct measurements, on a substantial and sus-tained basis, essentially prohibitive. However, dataacquisition for Reld and parameter estimates viadata assimilation is feasible, but substantial re-sources must be applied to obtain adequate observa-tions.
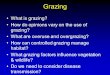
The general process of state and parameter es-timation is schematized in Figure 1. Measurementmodels link the state variables of the dynamicalmodel to the sensor data. Dynamics interpolates andextrapolates the data. Dynamical linkages amongstate variables and parameters allow all of them tobe estimated from measurements of some of them,i.e., those more accessible to existing techniques andprevailing conditions. Error estimation and errormodels play a crucial role. The data and dynamicsare melded with weights inversely related to theirrelative errors. The Rnal estimates should agree withthe observations and measurements within data er-ror bounds and should satisfy the dynamical modelwithin model error bounds. Thus the melded esti-mate does not degrade the reliable information ofthe observational data, but rather enhances thatinformation content. There are many importantfeedbacks in the generally nonlinear data assimila-tion system or ocean observing and predictionsystem (OOPS) schematized in Figure 1, which illus-trates the system concept and two feedbacks. Predic-tion provides the opportunity for efRcient samplingadapted to real time structures, events, and errors.Data collected for assimilation also used for ongo-ing veriRcation can identify model deRciencies andlead to model improvements.
A data assimilation system consists of three com-ponents: a set of observations, a dynamical model,and a data assimilation scheme or melding scheme.Modern interdisciplinary OOPS generally have com-patible nested grids for both models and sampling.An efRcient mix of platforms and sensors is selectedfor speciRc purposes.
Central to the concept of data assimilation is theconcept of errors, error estimation, and errormodeling. The observations have errors arising fromvarious sources: e.g., instrumental noise, environ-mental noise, sampling, and the interpretation ofsensor measurements. All oceanic dynamical modelsare imperfect, with errors arising from the approx-imate explicit and parameterized dynamics and thediscretization of continuum dynamics into a com-putational model.
A rigorous quantitative establishment of the accu-racy of the melded Reld and parameter estimates, orveriRcation, is highly desirable but may be difRcult
to achieve because of the quantity and quality of thedata required. Such veriRcation involves all subcom-ponents: the dynamical model, the observationalnetwork, the associated error models, and the meld-ing scheme. The concept of validation is the estab-lishment of the general adequacy of the system andits components to deal with the phenomena of inter-est. As simple examples, a barotropic model shouldnot be used to describe baroclinic phenomena, anddata from an instrument whose threshold is higherthan the accuracy of the required measurement arenot suitable. In reality, validation issues can bemuch more subtle. Calibration involves the tuningof system parameters to the phenomena and re-gional characteristics of interest. Final veriRcationrequires dedicated experiments with oversampling.
At this point it is useful to classify types of esti-mates with respect to the time interval of the datainput to the estimate for time t. If only past andpresent data are utilized, the estimation is a Rlteringprocess. After the entire time series of data is avail-able for (0,T), the estimate for any time 04t4T isbest based on the whole data set and the estimationis a smoothing process.
Goals and Purposes
The speciRc uses of data assimilation depend uponthe relative quality of data sets and models, and thedesired purposes of the Reld and parameter esti-mates. These uses include the control of errors forstate estimates, the estimation of parameters, theelucidation of real ocean dynamical processes, thedesign of experimental networks, and oceanmonitoring and prediction.
First consider ocean prediction for scientiRc andpractical purposes, which is the analog of numericalweather prediction. In the best case scenario, thedynamical model correctly represents both theinternal dynamical processes and the responses toexternal forcings. Also, the observational networkprovides initialization data of desired accuracy. Thephenomenon of loss of predictability nonethelessinhibits accurate forecasts beyond the predictabilitylimit for the region and system. This limit for theglobal atmosphere is 1}2 weeks and for the mid-ocean eddy Reld of the north-west Atlantic on theorder of weeks to months. The phenomenon is asso-ciated with the nonlinear scale transfer and growthof initial errors. The early forecasts will accuratelytrack the state of the real ocean, but longer fore-casts, although representing plausible and realisticsynoptical dynamical events, will not agree withcontemporary nature. However, this predictabilityerror can be controlled by the continual assimilation
0007
0008
0009
0010
0011
0012
0013
2 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

of data, and this is a major use of data assimilationtoday.
Next, consider the case of a Reld estimate withadequate data but a somewhat deRcient dynamicalmodel. Assimilated data can compensate for theimperfect physics so as to provide estimates inagreement with nature. This is possible if dynamicalmodel errors are treated adequately. For instance, ifa barotropic model is considered perfect, and baro-clinic real ocean data are assimilated, the Reld esti-mate will remain barotropic. Even though meldedestimates with deRcient models can be useful, it is ofcourse important to attempt to correct the modeldynamics.
Parameter estimation via data assimilation ismaking an increasingly signiRcant impact on oceanscience via the determination of both internal andexternal parameter values. Regional Reld estimatescan be substantially improved by boundary condi-tion estimation. Biological modelers have been ham-pered by the inability to directly measure in siturates, e.g., grazing and mortality. Thus, for interdis-ciplinary studies, internal parameter estimation isparticularly promising. For example, measurementsof concentration Relds of plankton together witha realistic interdisciplinary model can be used forin situ rate estimation.
Data-driven simulations can provide four-dimen-sional time series of dynamically adjusted Reldswhich are realistic. These Relds, regarded as (numer-ical) experimental data, can thus serve as highresolution and complete data sets for dynamicalstudies. Balance of terms in dynamical equationsand overall budgets can be carried out to determineSuxes and rates for energy, vorticity, productivity,grazing, carbon Sux, etc. Case studies can be carriedout, and statistics and general processes can beinferred for simulations of sufRcient duration. Ofparticular importance are observation system simu-lation experiments (OSSEs), which Rrst entered met-eorology almost 30 years ago. By subsampling thesimulated ‘true’ ocean, future experimental net-works and monitoring arrays can be designed toprovide efRcient Reld estimates of requisite accu-racies. Data assimilation and OSSEs develop theconcepts of data, theory, and their relationship be-yond those of the classical scientiRc methodology.For a period of almost 300 years, scientiRc meth-odology was powerfully established on the basis oftwo essential elements: experiments/observationsand theory/models. Today, due to powerful com-puters, science is based on three fundamental con-cepts: experiment, theory, and simulation. Since ourbest Reld and parameter estimates today are basedon data assimilation, our very perception and con-
ceptions of nature and reality require philosophicaldevelopment.
It is apparent from the above discussion that mar-ine operations and ocean management must dependon data assimilation methods. Data-driven simula-tions should be coupled to multipurpose manage-ment models for risk assessments and for the designof operational procedures. Regional multiscaleocean prediction and monitoring systems, designedby OSSEs, are being established to provide ongoingnowcasts and forecasts with predictability error con-trolled by updating. Both simple and sophisticatedversions of such systems are possible and relevant.
Regional Forecasting and Dynamics
In this section, the issues and concepts introduced inthe preceding sections are illustrated in the contextof real-time predictions carried out in 1996 forNATO naval operations in the Strait of Sicily andfor interdisciplinary multiscale research in 1998 inMassachusetts Bay. The Harvard Ocean PredictionSystem (HOPS) with its primitive equation dynam-ical model was utilized in both cases. In the Strait ofSicily (Figure 2), the observational network withplatforms consisting of satellites, ships, aircraft, andLagrangian drifters, was managed by the NATOSACLANT Undersea Research Centre. In Mass-achusetts Bay (Figure 3), the observational networkwith platforms consisting of ships, satellites, andautonomous underwater vehicles, was provided bythe Littoral Ocean Observing and Prediction System(LOOPS) project within the US National OceanPartnership Program. The data assimilation methodsused in both cases were the HOPS OI and ESSEschemes (see below). In both cases the purposes ofdata assimilation were to provide a predictive capa-bility, to control loss of predictability, and to inferbasic underlying dynamical processes.
The dominant regional variabilities determinedfrom these exercises and studies are schematized inFigures 2A and 3A. The dominant near surface Sowin the strait is the Atlantic Ionian Stream, AIS (blackand dotted white lines) and dominant variabilitiesinclude the location and shapes of the AdventureBank Vortex (ABV), Maltese Channel Crest (MCC),and the Ionian Shelfbreak Vortex (ISV), with shiftsand deformations 0 (10}100km) occurring in0 (3}5 days). The variability of the MassachusettsBay circulation is more dramatic. The buoyancySow-through current which enters the Bay in thenorth from the Gulf of Maine may have one, two orthree branches, and together with associated vor-tices (which may or may not be present), can reversedirections within the bay. Storm events shift the
0014
0015
0016
0017
0018
0019
MODELS / Data Asssimilation (Physical/Interdisciplinary) 3
VVCrNPrMDrScanrPadmarRWOS 0404

pattern of the features which persist inertially be-tween storms. Actual real-time forecast Relds aredepicted in Figures 2B and 3B.
The existence of forecasts allows adaptive samp-ling, i.e., sampling efRciently related to existingstructures and events. Adaptive sampling can bedetermined subjectively by experience or objectivelyby a quantitative metric. The sampling pattern asso-ciated with the temperature objective analysis errormap (Figure 2C) reSects the Sight pattern of anaircraft dropping subsurface temperature probes(AXBTs). The data were assimilated into a forecastin support of naval operations centered near the ISV(Figure 2A). The sampling extends to the surround-ing meanders of the AIS, which will affect the cur-rent’s thermal front in the operational region. Themultiscale sampling of the Massachusetts Bay ex-periment is exempliRed in Figure 3C, D by shiptracks adapted to the interactive submesoscales,mesoscales, bayscales, and large-scales. Note thatthe tracks of Figure 3D are superimposed on a fore-cast of the total temperature forecast error standarddeviation. The shorter track is objectively locatedaround an error maximum. The longer track is forreduction of velocity error (not shown). Eigen-decomposition of the variability Relds helps dynam-ical interpretations. The Rrst temperature variabilityeigenmodes for the strait and the bay are depicted inFigures 2D and 3E respectively. The former is asso-ciated with the dominant ABV variability and thelatter with the location, direction, and strength ofthe inSow to the bay of the buoyancy current fromthe Gulf of Maine.
A qualitative skill score for the prediction ofdominant ABV, MCC, and ISV variabilities in-dicated correct predictions 75% of the time. It wasobtained by validation against new data for assimi-lation and independent satellite sea surface temper-ature data as shown in Figure 2E for the forecast ofFigure 2B. An important kinematical and dynamicalinterconnection between the eastern and westernMediterranean is the deep Sow of salty LevantineIntermediate Water (LIW), which was not directlymeasured but was inferred from data assimilativesimulations (Figure 2F). The scientiRc focus of theMassachusetts Bay experiment was plankton patchi-ness, in particular the spatial variability of zooplan-kton and its relationship to physical andphytoplankton variabilities (Figure 3B, G). Thesmallest scale measurements in the bay were turbu-lence measurements from an AUV (Figure 3F),which were also used to research the assimilation inreal time of subgridscale data in the primitive equa-tion model.
Concepts and Methods
By deRnition (see Introduction), data assimilation inocean sciences is an estimation problem for theocean state, model parameters, or both. Theschemes for solving this problem often relate toestimation or control theories (see below), but someapproaches like direct minimization, stochastic, andhybrid methods (see below) can be used in bothframeworks. Several schemes are theoretically opti-mal, while others are approximate or suboptimal.Although optimal schemes are preferred, suboptimalmethods are generally the ones in operational usetoday. Most schemes are related in some fashion toleast-squares criteria which have had great success.Other criteria, such as the maximum likelihood,minimax criterion or associated variations might bemore appropriate when data are very noisy andsparse, and when probability density functions aremultimodal (see below). Parameters are assumednext to be included in the vector of state variables.For more detailed discussions, the reader is referredto the article published by Robinson et al. in 1998(see Further Reading section).
Estimation Theory
Estimation theory computes the state of a system bycombining all available reliable knowledge of thesystem including measurements and theoreticalmodels. The a priori hypotheses and melding orestimation criterion are crucial since they determinethe inSuence of dynamics and data onto the stateestimate.
At the heart of estimation theory is the KalmanRlter, derived in 1960. It is the sequential, unbiased,minimum error variance estimate based upon a lin-ear combination of all past measurements and dy-namics. Its two steps are: (1) the forecast of the statevector and of its error covariance, and (2) the data-forecast melding and error update, which includethe linear combination of the dynamical forecastwith the difference between the data and modelpredicted values for those data (i.e., data residuals).
The Kalman smoother uses the data availablebefore and after the time of interest. The smoothingis often carried out by propagating the future datainformation backward in time, correcting an initialKalman Rlter estimate using the error covariancesand adjoint dynamical transition matrices, which isusually demanding on computational resources.
In a large part because of the linear hypothesisand costs of these two optimal approaches, a seriesof approximate or suboptimal schemes have been
0020
0021
0022
0023
0024
0025
0026
4 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

employed for ocean applications. They are now de-scribed, from simple to complex.
Direct insertion consists of replacing forecastvalues at all data points by the observed data whichare assumed to be exact. The blending estimate isa scalar linear combination, with user-assignedweights, of the forecast and data values at all datapoints. The nudging or Newtonian relaxationscheme ‘relaxes’ the dynamical model towards theobservations. The coefRcients in the relaxation canvary in time but, to avoid disruptions, cannot be toolarge. They should be related to dynamical scalesand a priori estimates of model and data errors.
In optimal interpolation (OI), the matrix weight-ing the data residuals, or gain matrix, is empiricallyassigned. If the assigned OI gain is diagonal, OI andnudging schemes can be equivalent. However, theOI gain is usually not diagonal, but a function ofempirical correlation and error matrices.
The method of successive corrections performsmultiple but simpliRed linear combination of thedata and forecast. Conditions for convergence to theKalman Rlter have been derived, but in practice onlya few iterations are usually performed. Frequently,the scales or processes of interest are corrected oneafter the other, e.g., large-scale Rrst, then mesoscale.
Control Theory
All control theory or variational approaches per-form a global time-space adjustment of the modelsolution to all observations and thus solvea smoothing problem. The goal is to minimize a costfunction penalizing misRts between the data andocean Relds, with the constraints of the model equa-tions and their parameters. The misRts are inter-preted as part of the unknown controls of the oceansystem. Similar to estimation theory, control theoryresults depend on a priori assumptions for the con-trol weights. The dynamical model can be eitherconsidered as a strong or weak constraint. Strongconstraints correspond to the choice of inRniteweights for the model equations; the only free vari-ables are the initial conditions, boundary conditionsand/or model parameters. A rational choice for thecost function is important. A logical selection cor-responds to dynamical model (data) weights inverse-ly proportional to a priori speciRed model (data)errors.
In an ‘adjoint method’, the dynamical model isa strong constraint. One penalty in the cost functionweights the uncertainties in the initial conditions,boundary conditions, and parameters with their re-spective a priori error covariances. The other is thesum over time of data-model misRts, weighted by
measurement error covariances. A classical ap-proach to solve this constrained optimization is touse Lagrange multipliers. This yields Euler-Lagrangeequations, one of which is the so-called adjointequation. An iterative algorithm for solving theseequations has often been termed the adjoint method.It consists of integrating the forward and adjointequations successively. Minimization of the gradientof the cost function at the end of each iterationleads to new initial, boundary, and parametervalues. Another iteration can then be started, and soon, until the gradient is small enough.
Expanding classic inverse problems to the weakconstraint Rt of both data and dynamics leads togeneralized inverse problems. The cost function isusually as in adjoint methods, except that a thirdterm now consist of dynamical model uncertaintiesweighted by a priori model error covariances. In theEuler-Lagrange equations, the dynamical model un-certainties thus couple the state evolution with theadjoint evolution. The representer method is an al-gorithm for solving such problems.
Direct Minimization Methods
Such methods directly minimize cost functions sim-ilar to those of generalized inverse problems, butoften without using the Euler-Lagrange equations.Descent methods iteratively determine directions lo-cally ‘descending’ along the cost function surface. Ateach iteration, a minimization is performed alongthe current direction and a new direction is found.Classic methods to do so are the steepest descent,conjugate-gradient, Newton, and quasi-Newtonmethods. A drawback for descent methods is thatthey are initialization sensitive. For sufRciently non-linear cost functions, they are restarted to avoidlocal minima.
Simulated annealing schemes are based on ananalogy to the way slowly cooling solids arrangethemselves into a perfect crystal, with a minimumglobal energy. To simulate this relatively randomprocess, a sequence of states is generated such thatnew states with lower energy (lower cost) are al-ways accepted, while new states with higher energy(higher cost) are accepted with a certain probability.
Genetic algorithms are based upon searches gen-erated in analogy to the genetic evolution of naturalorganisms. They evolve a population of solutionsmimicking genetic transformations such that thelikelihood of producing better data-Rtted genera-tions increases. Genetic algorithms allow nonlocalsearches, but convergence to the global minimum isnot assured due to the lack of theoretical base.
0027
0028
0029
0030
0031
0032
0033
0034
0035
MODELS / Data Asssimilation (Physical/Interdisciplinary) 5
VVCrNPrMDrScanrPadmarRWOS 0404

Stochastic and Hybrid Methods
Stochastic methods are based on nonlinear stochas-tic dynamical models and stochastic optimalcontrol. Instead of using brute force like descentalgorithms, they try to solve the conditional prob-ability density equation associated with ocean mod-els. Minimum error variance, maximum likelihoodor minimax estimates can then be determined fromthis probability density. No assumptions are re-quired, but for large systems, parallel machines areusually employed to carry out Monte Carlo en-semble calculations.
Hybrid methods are combinations of previouslydiscussed schemes, for both state and parameterestimation; for example, error subspace statisticalestimation (ESSE) schemes. The main assumption ofsuch schemes is that the error space in most oceanapplications can be efRciently reduced to its essen-tial components. Smoothing problems based on Ka-lman ideas, but with nonlinear stochastic modelsand using Monte Carlo calculations, can then besolved. Combinations of variational and direct min-imization methods are other examples of hybridschemes.
Examples
This section presents a series of recent results thatserve as a small but representative sample of thewide range of research carried out as data assimila-tion was established in physical oceanography.
General Circulation from Inverse Methods
The central idea is to combine the equations govern-ing the oceanic motion and relevant oceanic tracerswith all available noisy observations, so as to esti-mate the large-scale steady-state total velocities andrelated internal properties and their respective er-rors.. The work of Martel and Wunsch in 1993exempliRes the problem. The three-dimensional cir-culation of the North Atlantic (Figure 4A) wasstudied for the period 1980}85. The observationsavailable consisted of objective analyses of temper-ature, salinity, oxygen, and nutrients data; clima-tological ocean}atmosphere Suxes of heat, watervapor, and momentum; climatological river runoffs;and current meter and Soat records. These datawere obtained with various sensors and platforms,on various resolutions, as illustrated by Figure 4B.A set of steady-state equations were assumed tohold a priori, up to small unknown noise terms. Thetracers were advected and diffused. The advection
velocities were assumed in geostrophicthermal}wind balance, except in the top layer whereEkman transport was added. Hydrostatic balanceand mass continuity were assumed. The problem isinverse because the tracers and thermal wind vel-ocities are known; the unknowns are the Relds ofreference level velocities, vertical velocity, and tracermixing coefRcients.
Discrete Rnite-difference equations were integ-rated over a set of nested grids of increasing resolu-tions (Figure 4A). The Sows and Suxes at theboundaries of these ocean subdivisions were com-puted from the data (at 13 resolution). The resultingdiscrete system contained 429 000 unknowns and9000 equations. It was solved using a tapered (nor-malized) least-squares method with a sparse conju-gate-gradient algorithm. The estimates of the totalSow Reld and of its standard error are plotted onFigure 1C and D. The Gulf Stream, several recir-culation cells and the Labrador current are present.In 1993, such a rigorous large-scale, dense, andeclectic inversion was an important achievement.
Global versus Local Data Assimilation via Nudging
Malanotte-Rizzoli and Young in 1994 investigatedthe effectiveness of various data sets to correct andcontrol errors. They used two data sets of differenttypes and resolutions in time and space in the GulfStream region, at mesoscale resolution and for peri-ods of the order of 3 months, over a large-scaledomain referred to as global scale.
One objective was to assimilate data of high qual-ity, but collected at localized mooring arrays, and toinvestigate the effectiveness of such data in improv-ing the realistic attributes of the simulated oceanRelds. If successful, such estimates allow for dynam-ical and process studies. The global data consistedof biweekly Relds of sea surface dynamic height, andof temperature and salinity in three dimensions,over the entire region, as provided by the OptimalThermal Interpolation Scheme (OTIS) of the USNavy Fleet Numerical Oceanography Center. Thelocal data were daily current velocities from twomooring arrays. The dynamical model consisted ofprimitive equations (Rutgers), with a suboptimalnudging scheme for the assimilation.
The global and local data were Rrst assimilatedalone, and then together. The ‘gentle’ assimilationof the spatially dense global OTIS data was neces-sary for the model to remain on track during the3-month period. The ‘strong’ assimilation of thedaily but local SYNOP data was required to achievelocal dynamical accuracies, especially for the vel-ocities.
0036
0037
0038
0039
0040
0041
0042
0043
6 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

Small-scale Convection and Data Assimilation
In 1994, Miller et al. addressed the use of varia-tional or control theory approaches (see earlier) toassimilate data into dynamical models with highlynonlinear convection. Because of limited data andcomputer requirements, most practical ocean mod-els cannot resolve motions that result from staticinstabilities of the water column; these motions andeffects are therefore parameterized. A commonparameterization is the so-called convective adjust-ment. This consists of assigning inRnite mixing coef-Rcients (e.g., heat and salt conductivities) to thewater at a given level that has higher density thanthe water just below. This is carried out by settingthe densities of the two parcels to a unique value insuch a way that heat and mass are conserved. Ina numerical model, at every time step, water pointsare checked and all statistically unstable proRlesreplaced by stable ones.
The main issues of using such convective schemeswith variational data assimilation are that: (1) thedynamics is no longer governed by smooth equa-tions, which often prevents the simple deRnition ofadjoint equations; (2) the optimal ocean Relds mayevolve through ‘nonphysical’ states of static instabil-ity; and (3), the optimization is nonlinear, even ifthe dynamics are linear. Ideally, the optimal Reldsshould be statically stable. This introduces a set ofinequality constraints to satisfy. An idealized prob-lem was studied so as to provide guidance for realis-tic situations. A simple variational formulation hadseveral minima and at times produced evolutionswith unphysical behavior. ModiRcations that led tomore meaningful solutions and suggestions foralgorithms for realistic models were discussed. Oneoption is the ‘weak’ static stability constraint: a pen-alty that ensures approximate statistic stability isadded to the cost function with a very small error orlarge weight. In that case, statistic stability can beviolated, but in a limited fashion. Another option isthe ‘strong constraint’ form of static stability whichcan be enforced via Lagrange multipliers. Convexprogramming methods which explicitly account forinequality constraints could also be utilized.
Global Ocean Tides Estimated from GeneralizedInverse Methods
In 1994, Egbert et al. estimated global ocean tidesusing a generalized inverse scheme with the intent ofremoving these tides from the data collected by theTOPEX/POSEIDON satellite and thus allowing thestudy of subtidal ocean dynamics.
A scheme for the inversion of the satellite cross-over data for multiple tidal constituents was appliedto 38 cycles of the data, leading to global estimatesof the four principal tidal constituents (M2, S2,K1 and O1) at about 13 resolution. The dynamicalmodel was the linearized, barotropic shallow waterequations, corrected for the effects of ocean self-attraction and tidal loading, the state variables be-ing the horizontal velocity and sea surface heightRelds. The data sets were linked to measurementmodel and comprehensive error models were de-rived.
The generalized inverse tidal problem was solvedby the representer method. Representer functionsare related to Green’s functions: they link a givendatum to all values of the state variables over theperiod considered. These representers were com-puted by solving the Euler-Lagrange equations inparallel. The size of the problem was reduced bywinnowing out the full set of 6350 crossovers to anevenly spaced subset of 986 points (see Figure 5A).The resulting representer matrix was then reducedby singular value decomposition.
The amplitude and phase estimates for theM2 constituent are shown in Figure 5B. TheM2 Relds are qualitatively similar to previous resultsand amphidromes are consistent. However, whencompared with previous tidal model estimates, theinversion result is noticeably smoother and in betteragreement with altimetric and ground truth data.
Conclusions
The melding of data and dynamics is a powerful,novel, and versatile methodology for parameter andReld estimation. Data assimilation must be anticip-ated both to accelerate research progress in com-plex, modern multiscale interdisciplinary oceanscience, and to enable marine technology and mari-time operations that would otherwise not be pos-sible.
See also
Convection: Open Ocean Convection. Elemental Dis-tribution: Overview. Food Webs: Patch Dynamics.Models: Biogeochemical Data Assimilation; Bi-ogeochemical Models; Coastal Circulation Models; In-verse Methods; Numerical Models (The ForwardProblem); Regional Models (Including Shelf Sea Mod-els). Ocean Circulation: General Processes. OceanCurrents: Atlantic Western Boundary I Florida Cur-rent/Gulf Stream/Labrador Current; Mediterranean Sea(Overview of Basin and Current Systems). Ocean Pro-cess Tracers: Inverse Modelling of Tracers (Nutrients).
0044
0045
0046
0047
0048
0049
0050
0051
MODELS / Data Asssimilation (Physical/Interdisciplinary) 7
VVCrNPrMDrScanrPadmarRWOS 0404

Satellite Remote Sensing: Future Developments (thenext decade); Observation Synthesis. Sensors: CTD;Expendable Sensors. Turbulence and Diffusion:Mesoscale Eddies. Upper Ocean Structure: OceanFronts and Eddies; Time and Space Variability. Waves:Tides.
Further ReadingAnderson D and Willebrand J (eds) (1989) Oceanic Circu-
lation Models: Combining Data and Dynamics. Dor-drecht: Kluwer Academic.
Bennett AF (1992) Inverse Methods in Physical Oceanog-raphy. Cambridge Monographs on Mechanics and Ap-plied Mathematics. Cambridge: Cambridge UniversityPress.
Brasseur P and Nihoul JCJ (eds) (1994) Data assimilation:tools for modelling the ocean in a global change per-spective. In: NATO ASI Series, Series I: Global Envir-onmental Change, vol. 19.
Egbert GD, Bennett AF and Foreman MGG (1994)TOPEX/POSEIDON tides estimated using a global in-verse model. Journal of Geophysical Research 24:821}824, 852.
Haidvogel DB and Robinson AR (eds) (1989) Specialissue on data assimilation. Dyn Atmos Oceans 13:171}517.
Lermusiaux PFJ (1999) Estimation and study of mesoscalevariability in the Strait of Sicily. Dyn Atmos. Oceans29: 255}303.
Lermusiaux PFJ and Robinson AR (1999) Data assimila-tion via error subspace statistical estimation, Part I:Theory and schemes. Mon. Weather Rev. 7:1385}1407.
Malanotte-Rizzoli P and Young RE (1995) Assimilationof global versus local data sets into a regional model ofthe Gulf Stream system: I. Data effectiveness. Journalof Geophysical Research 24: 773}724.
Malanotte-Rizzoli P (ed) (1996) Modern Approaches toData Assimilation in Ocean Modeling, ElsevierOceanography Series.
Martel F and Wunsch C (1993) The North Atlantic circu-lation in the early 1980 s } an estimate from inversionof a Rnite-difference model. J. Phys. Oceanogr. 23:898}924.
Miller RN, Zaron EO and Bennett AF (1994) Data as-similation in models with convective adjustment. Mon.Weather Rev. 2607}2613.
Robinson AR, Lermusiaux PFJ and Sloan NQ III (1998)Data assimilation. In: Brink KH and Robinson AR(eds) The Sea: The Global Coastal Ocean I, Processesand Methods, vol. 10. New York: John Wiley andSons.
Robinson AR (1999) Forecasting and simulating coastalocean processes and variabilities with the HarvardOcean Prediction System. In: Mooers CNK (ed)Coastal Ocean Prediction, AGU Coastal and EstuarineStudy Series, pp. 77}100.
Robinson AR and Sellschopp J (2000) Rapid assessment
of the coastal ocean environment. In: Pinardi N andWoods JD (eds) Ocean Forecasting: Conceptual Basisand Applications.
Wunsch C (1996) The Ocean Circulation Inverse Prob-lem. Cambridge: Cambridge University Press.
8 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

Observational networkSampling schemeSensor dataand data errors
Measurement modelsand error models
DY
NA
MIC
AL MODELS _ASSIM
ILATIO
NS
CH
EMES_ERRORMODEL
S_
Mod
el im
prov
emen
ts
Ada
ptiv
e sa
mpl
ing
State and parameterestimates and errors
SV SVE P PE
SV: State VariableP: ParameterO: ObservedM: MeasuredU: Unobserved or UnmeasuredE: Error
: Dynamical linkages
OSVi MPk
UPlUSVj
Figure 1 Data assimilation system schematic.a0404fig0001
MODELS / Data Asssimilation (Physical/Interdisciplinary) 9
VVCrNPrMDrScanrPadmarRWOS 0404

38
36
12 14 16
12 14 16
38
3838
37
3737
36
3636
35
3535
34
10 12 13 14 15 16 17 1811
12 1213 1314 1415 1516 1611 11
28.6
27.0
25.0
23.0
21.4
17 1718 18
0.95
0.77
0.54
0.31
0.13
38°N
37°
36°
35°
11°E 12° 13° 14° 15° 16° 17°
WesternMed.
Tyrrhenian Sea
(iii)
1000
_ 2000
_3000
IonianSea
2
3
_250
_ 500
(iv)i
_1000_1000
_1000
L_1 2 5 4 mL_ 4 m
H_2 2 m
H1 7 7 m
H1 4 9 9 m
_250 (v)
_2000(ii)
1
v
M
( )
5
C
SG
4
(A) (B)
(C) (D)
(E) (F)
Min = 7.9864E_02 Max = 1.0000E+00
Nowcast: 18 Sep 1996
Sicily
Italy
Sicily
Tunisia
Figure 2 Strait of Sicily. (A) Schematic of circulation features and dominant variabilities. (B) Forecast of the surface temperaturefor 25 August 1996, overlaid with surface velocity vectors (scale arrow is 0.25 m s~1). (C) Objectively analyzed surface standarderror deviation associated with the aircraft sampling on 18 September 1996 (normalized from 0 to 1). (D) Surface values of the firstnondimensional temperature variability mode. (E) Satellite SST distributions for 25 August 1996. (F) Main LIW pathways, features,and mixing on deep potential density anomaly iso-surface (ph"29.05), over bottom topography.
a0404fig0002
10 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

42.6
42.4
42.2
42
41.8
41.6
_ 71.0 _ 70.8 _ 70.6 _ 70.4 _ 70.2 _ 70.0
Cape Cod
Sandwich
Branstable
Monomet
Plymouth
Duxbury
Scituate
Boston
Salem
Gloucester
_40
_ 20
_ 80
_80
_ 80
_60
80
North
pas
sage
71 70
43
42
4.8
3.8
2.5
1.3
0.2
Gulf ofmaine
Stellwagen bank
Stellwagen basin
Broadsound
60
_10 _
40
_40
_40
_140
_16
0
_120
_20
_ 60
MassachusettsBay South passage
Race pointProvencetown
_20
_20
_10
Cape cod Bay
(A) (B)
NMFS Able J(Large Scale Survey)43
42
41
71 70 69 68 67
Temp. Er. Std. Dev._Oct. 1, 1998 Non-dim. Temp. Component of Var.Mode at 20 m
43
42
71 70
3.0
2.5
1.8
1.1
0.6
42.52 N70.80 W
41.80 N70.10 W
0m
50
0km
(C) (D) (E)
(G)
Cape Ann
10 cm/s
(F)
Northwesternmassachhsetts
Dissipation rate
Eddy diffusivity
Eddy viscosity
Richardson number
Vechical depth
m/c2
m/s2
e(w
kg)
Rw
Dep
th (
m)
10_7
10_8
10_9
10_4
10_4
10_5
10_6
10_6
10_8
10_1
100
8
9
1012800 12850 12900 12950 13000 13050 13100 13150 13200
Elapsed time(sec)
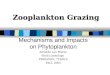
Figure 3 Massachusetts Bay. (A) Schematic of circulation features and dominant variabilities. (B) Chlorophyll-a (lg m~3) at 10 m,with overlying velocity vectors. (C) Sampling pattern for the bay scales and external large-scales in the Gulf of Maine. (D) Forecastof the standard error deviation for the surface temperature (from 03C in dark blue to a maximum of 0.73C in red), with tracks foradaptive sampling. (E) 20 m values of the temperature component of the first nondimensional physical variability mode. (F) AUVturbulence data (NUWC). (G) Vertical section of zooplankton (lM m~3) along the entrance of Massachusetts Bay.
a0404fig0003
MODELS / Data Asssimilation (Physical/Interdisciplinary) 11
VVCrNPrMDrScanrPadmarRWOS 0404

60°N
54°N
48°N
42°N
36°N
30°N
24°N
18°N
12°N
10°W
18°W
27°W
36°W
45°W
53°W
62°W71°W
24 25 26 27 28
3132
84 85
(A) (B)
GM
_ 60
30
0
30
50
equator
3.0
2.5
2.0
2.0 2.
5
2.5
GM
equator
(C) (D)
Figure 4 (A) Domain of the model used in the inverse computations. Weak dynamical constraints were imposed on the flow andtracers, and integrated over a set of nested grids, from the full domain (heavy solid lines) to an ensemble of successive divisions(e.g., dashed lines) reaching at the smallest scales the size of the boxes labeled by numbers. (B) Locations of the stations wherethe hydrographic and chemical component of the data set were collected (model grid superposed). (C) Inverse estimate of theabsolute sea surface topography in centimeters (contour interval is 10 cm). (D) Inverse estimate of the standard error deviation (incm) of the sea surface topography shown in (C). (Reproduced with permission from Martel and Wunsch, 1993.).
a0404fig0004
12 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

60
30
0
_ 30
_ 60
0 60 120 180 240 300 360
0 30 60 90 120 150 cm
Cross_over points = Representers calculated.
(A)
(B)
TPX M0.1: 2
Figure 5 (A) TOPEX/POSEIDON crossover points and subsampling. Representers were calculated only for the windowed subsetof 986 satellite crossover points (large filled dots), but differences from all 6355 crossover points (small dots and large filled dots)were included in the data-misfit penalty. (B) Generalized inverse estimate of the amplitude and phase of the M2 tidal constituent.The phase isolines are plotted in white over color-filled contours of the amplitude. Contour interval is 10 cm for amplitude and 303 forphase. (Reproduced with permission from Egbert et al. 1994.).
a0404fig0005
MODELS / Data Asssimilation (Physical/Interdisciplinary) 13
VVCrNPrMDrScanrPadmarRWOS 0404

38
36
12 14 16
12 14 16
38
3838
37
3737
36
3636
35
3535
34
10 12 13 14 15 16 17 1811
12 1213 1314 1415 1516 1611 11
28.6
27.0
25.0
23.0
21.4
17 1718 18
0.95
0.77
0.54
0.31
0.13
38°N
37°
36°
35°
11°E 12° 13° 14° 15° 16° 17°
WesternMed.
Tyrrhenian Sea
(iii)
1000
_ 2000
_3000
IonianSea
2
3
_250
_ 500
(iv)i
_1000_1000
_1000
L_1 2 5 4 mL_ 4 m
H_2 2 m
H1 7 7 m
H1 4 9 9 m
_250 (v)
_2000(ii)
1
v
M
( )
5
C
SG
4
(A) (B)
(C) (D)
(E) (F)
Min = 7.9864E_02 Max = 1.0000E+00
Nowcast: 18 Sep 1996
Sicily
Italy
Sicily
Tunisia
Colour Figure for Figure 2
14 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404

42.6
42.4
42.2
42
41.8
41.6
_ 71.0 _ 70.8 _ 70.6 _ 70.4 _ 70.2 _ 70.0
Cape Cod
Sandwich
Branstable
Monomet
Plymouth
Duxbury
Scituate
Boston
Salem
Gloucester
_40
_ 20
_ 80
_80
_ 80
_60
80
North
pas
sage
71 70
43
42
4.8
3.8
2.5
1.3
0.2
Gulf ofmaine
Stellwagen bank
Stellwagen basin
Broadsound
60
_10 _
40
_40
_40
_140
_16
0
_120
_20
_ 60
MassachusettsBay South passage
Race pointProvencetown
_20
_20
_10
Cape cod Bay
(A) (B)
NMFS Able J(Large Scale Survey)43
42
41
71 70 69 68 67
Temp. Er. Std. Dev._Oct. 1, 1998 Non-dim. Temp. Component of Var.Mode at 20 m
43
42
71 70
3.0
2.5
1.8
1.1
0.6
42.52 N70.80 W
41.80 N70.10 W
0m
50
0km
(C) (D) (E)
(G)
Cape Ann
10 cm/s
(F)
Northwesternmassachhsetts
Dissipation rate
Eddy diffusivity
Eddy viscosity
Richardson number
Vechical depth
m/c2
m/s2
e(w
kg)
Rw
Dep
th (
m)
10_7
10_8
10_9
10_4
10_4
10_5
10_6
10_6
10_8
10_1
100
8
9
1012800 12850 12900 12950 13000 13050 13100 13150 13200
Elapsed time(sec)
Colour Figure for Figure 3
MODELS / Data Asssimilation (Physical/Interdisciplinary) 15
VVCrNPrMDrScanrPadmarRWOS 0404

60
30
0
_ 30
_ 60
0 60 120 180 240 300 360
0 30 60 90 120 150 cm
Cross_over points = Representers calculated.
(A)
(B)
TPX M0.1: 2
Colour Figure for Figure 5
16 MODELS / Data Assimilation (Physical/Interdisciplinary)
VVCrNPrMDrScanrPadmarRWOS 0404