Embed Size (px)
DESCRIPTION
Models for Computer Control
Citation preview

10/20/2015
1
Muddu Madakyaru Ph.D’10
Associate Professor.Dept. of Chemical Engineering
Manipal Institute of Technology, Manipal
Models for Computer Control
Digital Computers as Controller:Main Task of Controller:
About computer control System:
10/20/2015
2
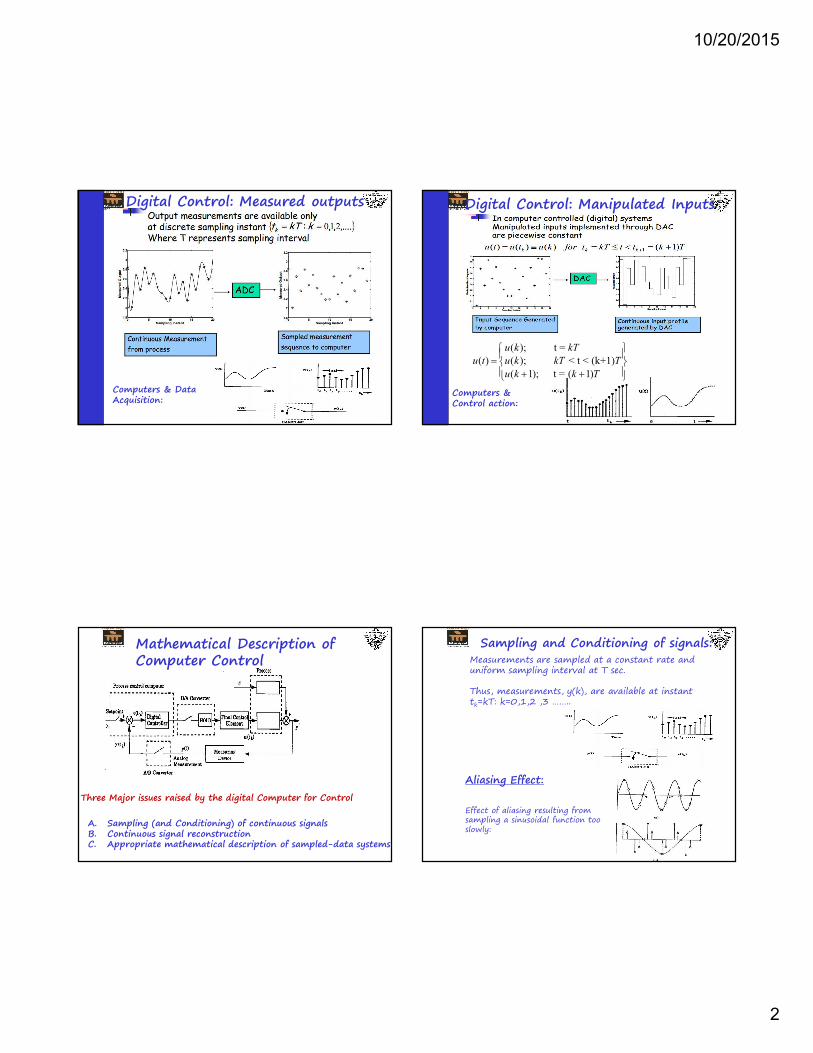
Digital Control: Measured outputs
Computers & Data Acquisition:
Digital Control: Manipulated Inputs
Computers & Control action:
( ); t = ( ) ( ); < t < (k+1)
( 1); t = ( 1)
u k kTu t u k kT T
u k k T
Mathematical Description of Computer Control
Three Major issues raised by the digital Computer for Control
A. Sampling (and Conditioning) of continuous signalsB. Continuous signal reconstructionC. Appropriate mathematical description of sampled-data systems
Sampling and Conditioning of signals:
Measurements are sampled at a constant rate and uniform sampling interval at T sec.
Thus, measurements, y(k), are available at instant tk=kT: k=0,1,2 ,3 ……..
Aliasing Effect:
Effect of aliasing resulting from sampling a sinusoidal function too slowly:

10/20/2015
3
Signal Reconstruction:Inputs reconstruction with zero order hold: Manipulated inputs are piecewise constant during the sampling interval
u(t)=u(k) for ( 1)t kT t k T
( ); t = ( ) ( ); < t < (k+1)
( 1); t = ( 1)
u k kTu t u k kT T
u k k T
Apparent signal delay induced by the ZOH element;
Hold:
Discrete Dynamic Models
Discrete Dynamic Models:Discrete Dynamic Models:
Integrating Factor

10/20/2015
4
Discrete Dynamic Models: Discrete Dynamic Models:
Pulse Transfer Function Matrix Pulse Transfer Function Matrix
10/20/2015
5
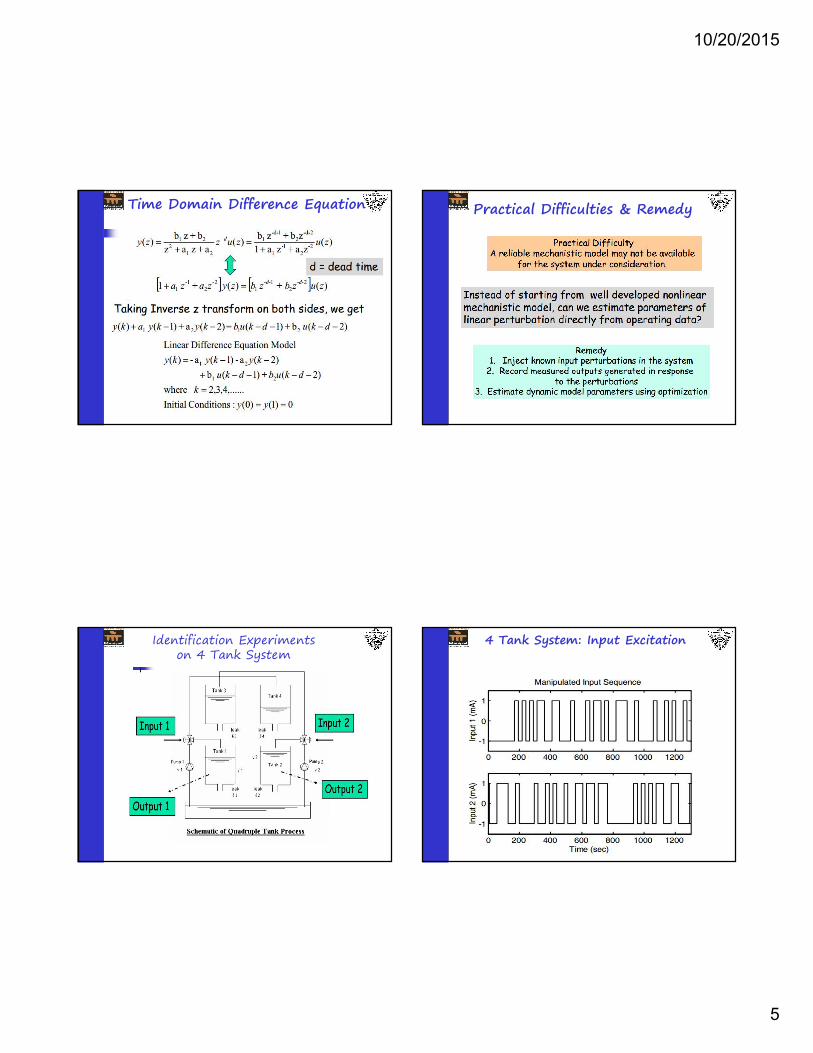
Time Domain Difference Equation Practical Difficulties & Remedy
Identification Experiments on 4 Tank System
20
Four Tank System: Input Excitation4 Tank System: Input Excitation
10/20/2015
6
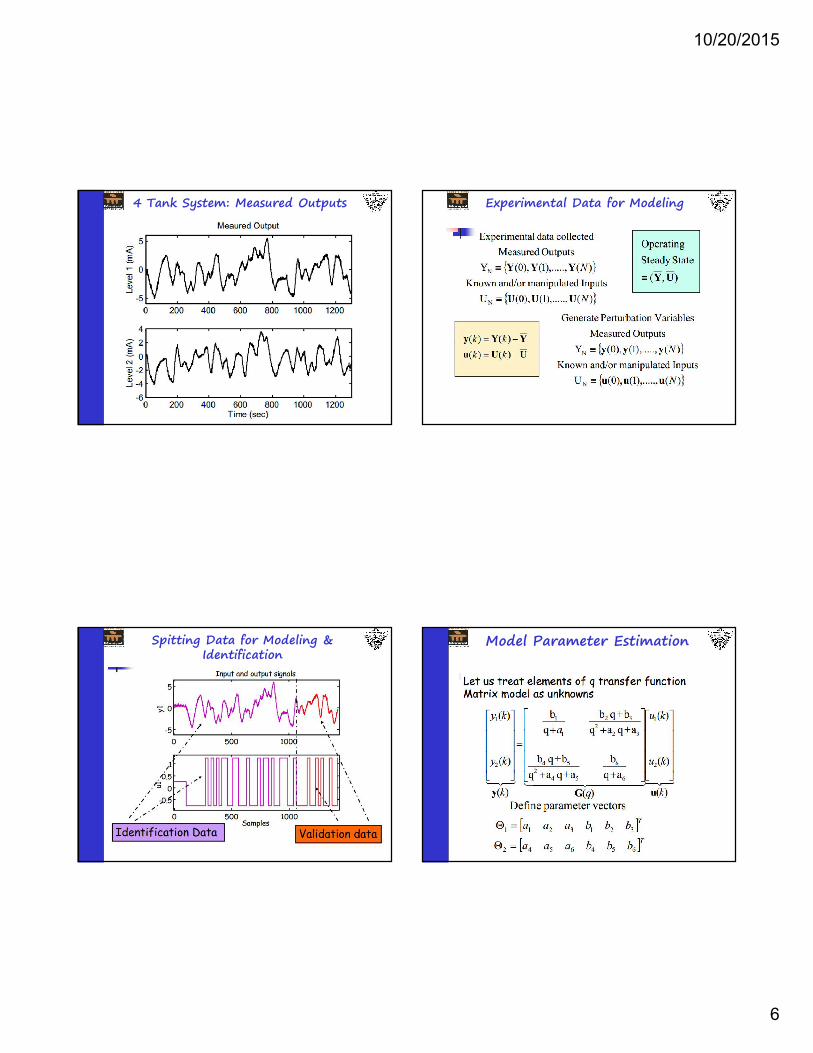
4 Tank System: Measured Outputs Experimental Data for Modeling
23
Splitting data for Identification & ValidationSpitting Data for Modeling & Identification
Model Parameter Estimation
10/20/2015
7
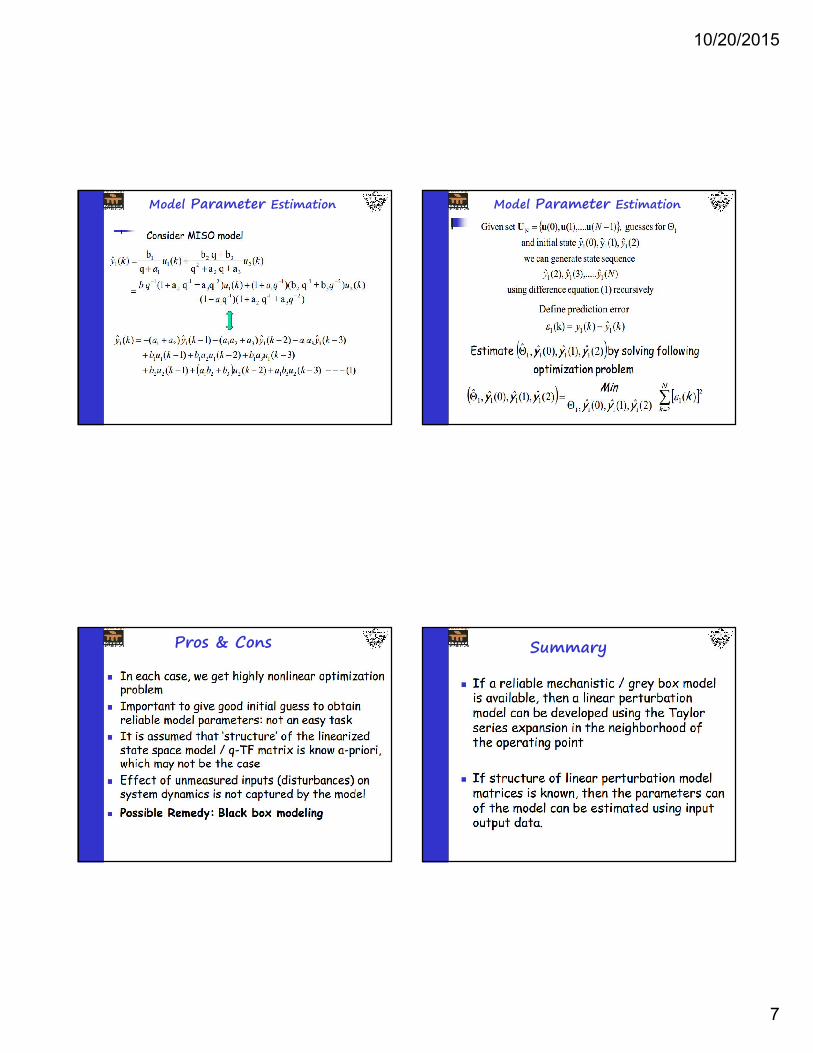
Model Parameter Estimation Model Parameter Estimation
Pros & Cons Summary
10/20/2015
8
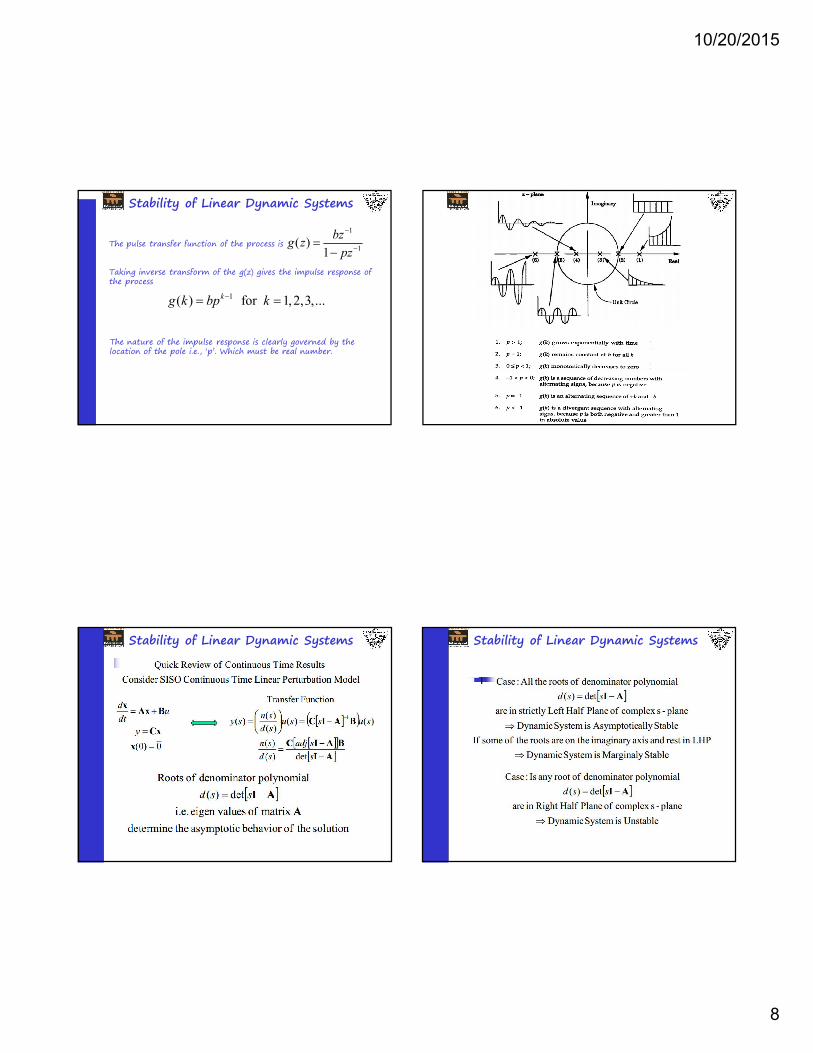
Stability of Linear Dynamic Systems
1
1( )
1
bzg z
pz
1( ) for 1,2,3,...kg k bp k
The pulse transfer function of the process is
Taking inverse transform of the g(z) gives the impulse response of the process
The nature of the impulse response is clearly governed by the location of the pole i.e., ‘p’. Which must be real number.
Stability of Linear Dynamic Systems Stability of Linear Dynamic Systems
10/20/2015
9
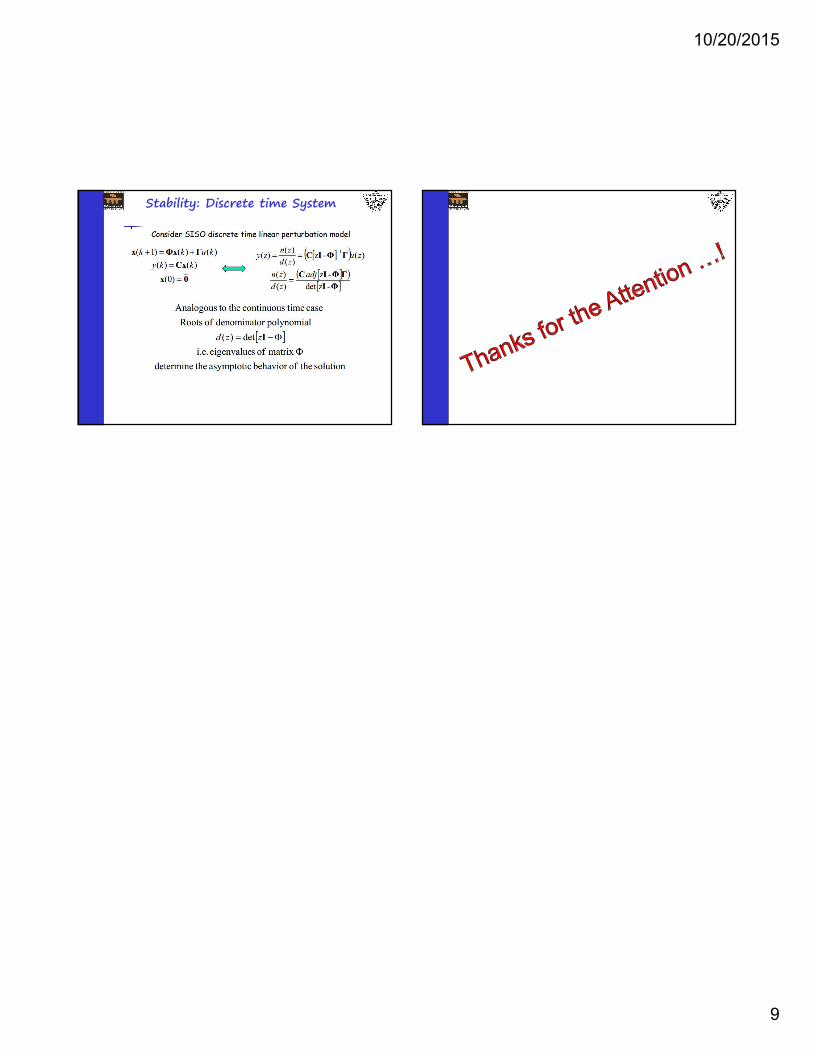
Stability: Discrete time System















![Control Models[1]](https://img.pdfslide.net/doc/110x75/553581384a7959a0138b460c/control-models1.jpg)













