Embed Size (px)
Citation preview

University of Alberta
MODUL.4TION OF THE HARMONIC SOLITON SOLUTIONS
FOR THE DEFOCUSIXG NONLINEAR SCHRODIXGER EQUATION
A thesis submitted to the Faculty of Graduate Studies and Research in partial fi iWhent of the requirements for the degree MASTER O F SCIENCE
in
APPLIED MATHEM ATICS
Department of Mathematical Sciences
Edmonton, Alberta
Spring, 1999

National Library 1*1 of Canada Bi bliot heque nationale du Canada
Acquisitions and Acquisitions et Bibliographie Services services bibliographiques
395 Wellington Street 395. rue Wellington Ottawa ON K I A ON4 OttawaON K1AON4 Canada Canada
yow lSk, votre réference
Our Ne Notre ref6renca
The author has granted a non- exclusive licence allowing the National Library of Canada to reproduce, loan, distribute or sell copies of this thesis in microfom, paper or electronic formats.
The author retains ownership of the copyright in this thesis. Neither the thesis nor substantid extracts fiom it may be printed or otherwise reproduced without the author' s permission.
L'auteur a accordé une licence non exclusive permettant à la Bibliothèque nationale du Canada de reproduire, prêter, distribuer ou vendre des copies de cette thèse sous la forme de microfiche/nlm, de reproduction sur papier ou sur format électronique.
L'auteur conserve la propriété du droit d'auteur qui protège cette thèse. Ni Ia thèse ni des extraits substantiels de celle-ci ne doivent être imprimés ou autrement reproduits sans son autorisation.

ABSTRACT
In this thesis we examine some of the properties of the slolvly decaying
solutions of the nonlinear Schrodinger equation. By the superpositioning slowly
decaying solutions we get the so called harmonic soliton solutions. In particular
we examine some of the modulating properties of the harmonic soliton solutions
for the defocusing Schrodinger equation:
iut + u,, - 2 1 ~ 1 ~ ~ = O

ACKNOWLEDGEMENTS
1 would me to express sincere thanks to my supervisor, Dr. M. Kovalyov,
for the excellent advice and considerable time and effort that he has spent on my
work while I have been completing this thesis.
Thank you Ion for teaching me LaTeX and all your constructive critisism.
FinaIly; 1 would Iike to t h d my brothers (Polly, Teeka, John). sisters (B,
Norma: Mila? Finey, Sandy, ShKmilla, Rita) and magé k d a Ch- for all their
support.

For
Mom and Dad

Contents
1 Beginnings 1
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . - . . . . . 1
3 1.2 Background and Some History . . . . . . . . . . . - . . . . - . . . -
2 Fourier Transforrn for linear equations 6
3 Origins 9
3.1 Derivation of IïdV and XLS equations . . . . . . . . . - - . . . . 9
3.2 Inverse Scattering Theory for KdV and NLS equationi . . . . . . 12
4 Soliton Theory 17
4.1 Derivation of the Y-soliton solution . . . . . . . . . - . . . . . . . 1 7
4.2 Harmonic So1ii;ons . . . . . . . . . . . . . . . . . . . . . . . - . . 31
4.3 Nonlinear Interference . . . . . . . . . . . . . . . . . . . . . . . . '24
Conclusion 33
Bibliography

List 01 E'igures
FIGURE 1 : The nonlinear interaction of solitons.. ..................................... -3
FIGURE 2 : Solitary waves of various speeds with a dispersive tail ............... 5
FIGURE 3 : Snapshots of the single harmonic soliton solution ................... 23
....................... FIGURE 4 : Snapshots of the two harmonic soliton solution 26
FIGURE 5 :Sime evolution of the wavepacket generatated by
8-harrnonic solitons.. ...................................................... ..28:29 :30
FIGURE 6 : Generation of an IV-wave type profile ..................................... 31
................................ FIGURE 7 : Generation of a 6-function profile..
FIGURE 8 : Time evolution of a N-wave generated by
10-hamonic solitons .......................................................
FIGURE 9 : Time evolution of a 6-function generated by
10-harmonic solitons ............................................................... -33
FIGURE r O: Matlab results.. ................................................................... .34

Chapter 1
Introduction
Most wave motions are modeled by linear hyperbolic equations, which we
can solve by means of the Fourier transform as we will discuss in Chapter 2.
After some simplifications these models often lose their hyperbolicity and more
important their lineasity, [El. As a result the Fourier transform method can no
longer be applied.
In this thesis we investigate the possibility of a replacement of the Fourier
transform for some nonlinear KdV-type equations, in particular the nonlinear
defocusing Schrodinger equation. First we remark, that the Fourier transform
method is a mathematical description of what is known in physics as lineâr mod-
ulation of waves. Linear modulation can be used to construct locdized in space
solutions for linear partial differential equations! so cdled wave packets. The
natural question one can ask is whether the existence of nonlinear modulation

yields exact solutions of a nonlinear partial differentiai equation. The andogy
between Fourier analysis and the Inverse Scattering Theory used for solving the
Cauchy problem for integrable equations suggests that if any nonlinear partial
differential equations d o w nonlinear rnodulat ion, t hen t hey would be the inte-
grable equations. It will be shown that the nonlinear defocusing Schrodinger
equat ion perrnits nonlinear modulation.
In Chapter 2 we tersely review the ideas behind the Fourier transform method
for linear partial differential equations. We will review how to construct an
arbitrary solution of the form e'(kxcf-w(k)'), which can be viewed as the simplest
components. In Chapter 3 we use the representation of such solutions to derive
the KdV and NLS equations. The solutions to the KdV and NLS can then be
obtained by the inverse scattering method. Chapter 4 contains the main results
of this thesis, namely the generation of the N-harmonic soliton solution for the
defocusing Schrodinger and some time evolution profiles for the N-harmonic
soliton case. These results are new and could possibly be applied to Soliton-
Lasers and Soliton-Based Communicatioo S ysterns , 1131.
1.2 Background and Some History
Solitary waves were f h t observed by J. Scott Russel in 1834. After extensive
experiments in the laboratory, he observed that:
1. solitary waves are long, shallow water woves of permanent form,
2. solitary waves propagate at speed c = Jm,

where g is the acceleration due to gravity, a is the amplitude and h is the uni-
form depth of the waveguide/channel. Further investigations into the existence
of solitary waves were undertaken by Airy (1845): Stokes (1847): Boussinesq
(1871-72) and Raleigh (1576). Korteweg and de Vries (1595) derived a nonlinear
equation, named after them, goveming long one dimensional, small amplitude,
surface gravity waves in a shdlow media, [14]. Further progress came when
Fermi, Posta and Ulam (1955) considered the problem of a one dimensional an-
harmonic lattice of equal masses coupled by nonlinear springs modeled by the
KdV? [15]. This subsequently lead to the discovery of so called solitary waves
i.e. a localized traveling wave solution, of the form f(x-ct), of a nonlinear par-
tial differential equation. Zabuslcy and Kruskal (1965) did extensive computer
simulations for the initial value problem for the KdV:
u(x, O) = cos(~ix), 0 5 x 5 2
where u, u,, u,, are ~eriodic functions on [0,2] for every t. They discovered
some solitary wave-type solutions with some rather interesting properties, (1 61.
They c d e d them solitons. They observed:
1. solitary wave is a stable formation;
2. when solitary waves move with different velocities, the faster one will over-
take the slower one and, after a complicated nonlinear interaction, the
solitons emerge in their original form with possible delays (phase shifts)
due to interaction (Fig. 1).

3. every sufficiently smooth and exponentially decaying solution of the KdV
with initial condition u(x, O ) = p(x), decornposes as t t m into a finite
number of solitary waves of various speeds and a dispersive tail (Fig. 2).
This kind of behavior is expected for linear problems, for exarnple for the wave
equation ut* = c2 u, with u(x, 0) = p(x) on O < x < 1, u(02 t ) = u(l, t ) and
ut (x7 0) = +(x) since each eigenfunction evolves se~arately, but that this codd
happen for a nonlinear problem was not expected. Later on, a number of other
equations with solutions possessing properties similar to that of solitons were
discovered, e.g.
Nonlinear Schrodinger: iut + u, + & ~ u / ~ u = O, u = f 1
e Sine-Gordon: utt - uzZ + sin(u) = O
We start by reviewing the ideas behind Fourier transform which will subse-
quently lead us to the KdV and the NLS.

Figure 1
Figure 2

Chapter 2
Fourier Transforrn for linear
equations
The most general Cauchy problem solvable by the Fourier transform is the
one reducihle to the f o m , ['il
rm-l u = f (2) for t = O
where
P ( D , T)U = O for t > O
k r u=O for k = 0 , 1, ..., m-2 a n d t = O

and P(D7 r) = P(D1, . . . : D,, r ) is a polynomid of degree rn in its n + 1 argu-
ment s,
Consider the simplest case of (2.1)-(2.3) that appears in the theory of waves,
[2] :
A formd solution of the standard problem (2.5)-(2.6) can be obtained using
the Fourier transformation
00
û(k7 t ) = u(z , t ) ë i k Z d z (2.S)
Assuming the validity of the interchange of derivative and integral, by taking
the Fourier transform of (%.5), we get:
which is a linear differential equation with solution:
where

The solution of (2.5)-(2.6) is:
If the system (2.10) is conservative, Le. w ( k ) is a real function and dispersive
(wM(k) # O ) , then the solution may decay into wavepackets which move with
group velocities wl (k ) and decays as t + m. So an nrbitraq solution can be
decomposed into ei(kr-w(k)t), which can be viewed as the simplest components of
that solution.

Chapter 3
Origins
3.1 Derivation of KdV and NLS equations
We f i s t begin by deriving the well known KdV equation and then the NLS
equation siiice the analysis of the NLS equation parallels that of the KdV equa-
tion. tVe showed in the previous chapter that an arbitrary wave can be decom-
posed into harmonics ei(kx-w(k)t) . Consider the plane wave corresponding to one
of these harmonics:
Assume the dispersion relation is of the form:
A partial differential equation for v(x, t ) with this dispersion relation is:

which is often called the linearized KdV equation, [6]. In shdow water theory,
the following conservation law must also hold, [2]:
For the lineasized version of the KdV equation, j is given by :
Combining (3.2),(3.3),(3.4) together ive obtain, [2]:
ut + Qu, + pu,,, + n,v"t = O
Using the rescaling,
and
we can rewrite (3.6) in the standard form
w, + w<<< + 6wwC = O (3.10)
In a similar fashion we derive the nonlinear Schrodinger equation (3.1 1):
iut + u,, + Z Y ( U ~ ~ U = O (3.11)

For a modulate wavetrain with most of the energy in wave numbers close
to çome values ko, f ( k ) is concentrated near k = ko, and one can approximate
(2.12) by:
where wo = w(ko): wh = wf(k0 ) : w{ = w"(ko].
Let k - ko = K , then:
where p(t, z) describes the modulation in (3.13) and satisfies
with the corresponding dispersion relation:
The equation for $ with the original dispersion relation
is:

If the approximation (3.14) to the linear dispersion is combined with a cubic
nonlinearity, [2], we have:
Since p(t ,2) = a d " - w t ) is still a solution to (3.15), we get that the non-
linear correction to the dispersion relation modifies W to:
Equation (3.18) can be normalized by choosing a frame of reference moving
with linear group velocity wh to eliminate the 9, term in (3.15) and then: after
rescaling the variables, [2], we get the nonlinear Schrodinger equat ion (3.11).
There are actually two NLS7s, one with v = 1, the other with v = -1.
The NLS can be considered xi the Hartree-Fock equation for a one-dimensional
quantum Boson gas with 6-point interaction. Then u plays the role of a coupling
constant: the case u > O corresponds to attractive interaction between particles
and v < O is the repulsive case, [6]. The two cases are essentially different in
optical applications, describing selffocusing or defocusing of the light rays in
nonlinear waveguides, [1 O].
3.2 Inverse Scattering Theory for KdV and
NLS equations
To illustrate the method of solving KdV, NLS-type equations using the method
of inverse scattering developed by Gardner-Green-Kruskal-Miura, [17, 181, we

start by considering the simplest of the equations, [5]. Consider the KdV equa-
tion
with
where f (x) is sufficiently smoot h and decays rapidly as lx 1 + m. The basic idea
is to relate the KdV equation to the time-independent Schrodinger scattering
problem:
The time-dependence of the eigenfunctions (3.22) is given by
ivhere 7 is an arbitrary constant pârameter and X is the spectral parameter.
The KdV can then be written using the Lax pair [M,L], as:
where the operators 1l.I and L are given by:
Equation (3.24) is satisfied if and only if u(x, t ) satisfies the KdV.
13

The solution of the KdV with initial condition (3.21) is as follows:
At t = O, we need to determine the spectmm of the Schrdinger equation
(3.23) which consists of a finite number of discrete eigenvalues, A, = 5; > 0;
n = 1, . . . , N and continuous spectrum, A = -k2 <O. The corresponding eigen-
functions are:
CQ 1. For X = (: : $,(x;t) z ~ ( t ) e-cnx as x i 05, with J-= $:(x,f)dx = 1
2. For X = -k2:
(a) +(x, t ) e-ikx + r ( k , t ) eikx as z + oo
(b) +(x, t ) a ( k , t ) e-'kx a s x - + - C O
where r(k, t ) and a ( k , t ) are the reflection and transmission coefficients respec-
tivel y.
At t = O we define the scattering data to be:
The time evolution of the scattering data

Using the scat t ering data define
Shen we recover the potential u(x, t) via:
where K (x, x; t ) is the solution of the Gel'fmd-Levitan--VI archenko equation
The method just described is a concise version of the method of inverse
scattering developed by Gardner-Green-Kruskal-Miwa.
Zakharov and Shabat (1972) showed that the inverse scattering approach
may also be applied to solve the NLS, [l]. In particular they shomed that the
nontrivial operators
and
satisS. Lm's equation (3.24) if and only if u(x, t ) is a solution of the NLS equa-
tion.

If we let
where
a r(E, t ) = r(5, O) eaiCzt
ci(t) = ~ ~ ( 0 ) e4ik:'
Then we obtain the Gel'fand-Levitan-Marchenko system:
which allows us to recover the potential via
( x ) = ( X x), JZw lu(s)12ds = -2K2(xl x).
In the reflectionless case the reflection coefficient is zero, i.e. r(k, t ) = r ( k , O) = 0,
and we can solve the Gel'fand-Levitan-Marchenko equation using the method of
separation of variables, [Hl , [19].
'ü denotes the cornplex conjugate of u

Chapter 4
Soliton Theory
4.1 Derivation of the N-soliton solution
Besides the method described in Chapter 3, we can obtain the N-soliton
solutions for the NLS following the methods of [l], [4], and [6]. We first observe
that the NLS can be written as:
v, - v, = [V, li]
which is a compatibility condition for:
where

and
The field functions q ( x , t ) and r(x, t ) are independent of A. Note that (4.1)
can also be written in Lax's form:
We can easily obtain the field functions for both NLS's with r = +q = O and
For r = q = O and Y = k1 equations (4.4) and (4.5) assumes the form:
and equations (4.2), (4,3) degenerates into
Solving the system (4.8), (4.9) we get,

With Qo given we can now obtain N-soliton solutions, q ( x , t ) , by means of
the N-fold Backlund-Darboux-Matveev transformations [4], [6], in the form:
where ,8, = c X~ = O + i q j , c= constant. +0>02(5, t i X j ) ' - V
For the 'JLS equation, r = f Q, Aj+w = X j ? and @j+w = - for some constants Pj
j cj7 with j 5 N
The 1-soliton solution of the NLS is:

and the corresponding functions given by :
Case 1: v = -1
where:
ail = ((A - ( - iT)es + (-iv + - ~ ) ~ - e ) e-iAf-2i"2'
ai2 = 2i9 e ' ( " ( X - 2 C ) + 2 t ( 2 V 2 - 2 ~ 2 + X 2 ) - 2 ~ € )
- sii) e-i(~(d\-2<)+2t(2~2-2$ + A 2 ) - 2 7 ~ ) azl - - -
Q2* = ((A - E + iq)ee + (iq + E - A) e-O) ei"f+2'"2t
e = 2 ( ~ - p + 4tc)q
Case II: v = +1
where:

The constants q = 3(X1) and 5 = R(Xi) determine the amplitude and velocity
(v = -40 of the soliton respectively, [Il. Unlike the KdV soliton, 7 and f are
independent and can be choosen arbitrary. In the general 3-case. the N-soliton
solution of the NLS equation depends on 4N arbitrary constants; qj? c j , p j , -fi-
For distinct cj7 as t t +oo the Pi-soliton breaks up into individual solitons
in such a way that the fastest soliton is always in front of the slocvest one in the
rear, and vice-versa as t -t -m. In this case, pj (the center coordinates) and
-fi (phase angle) are no longer fixed. For identical tj j: the solitons form a bound
state; [9].
4.2 Harmonic Solitons
The NLS with = 1 (self-focusing case) has regular solitons that describe
modulated ~ulses . For the NLS with u = -1 (de-focusing case) we get singular
solitons, due to the singularity they can no longer be modulated pulses the way
the regular solitons are. We will show that we c m still obtain modulation for
v = -1 using what we cal1 harmonic solitons. These harmonic solitons appear
when 3 ( X j ) = qj = O, i.e when both the numerator and denominator of (4.11)
are zero. By taking lim of (4.11) we get (4.15): rl+o

where:
where ,Bj = e2i€~(-f i f rf ' E j t ) , p j = -2i(pj - x - 4 t j t ) , yj9s, cj's, pj's are some
constants ,for j 5 n. The (n + j)-th row of A or B is obtained by subtracting
j-th row of (4.11) from the (n + j)-th row of (4.11), dividing the result by vj and
taking limit as qj + 0, [II]. The one harmonic soliton solution, q ( x , t ) , (Fig 3),

Each harmonic soliton is detemineci by- the constan& A: p arid -1 which
corresponds t o frequency, displacement and phase çhift respectively. By onalogy
23

with solitons, we define the nonlinear superposition of N harmonic solitons given
by the the sets of parameters A = ( A l , - - - Y AN)? P = (pi, - Y pn) and =
( T ~ , - - - , Y ~ ) to be the potential obtained by taking r ( k : t ) = r (k , O) exp(4it2t)
in the form:
1 if k, < k < k2 hl Ik) = {
O otherwise
The corresponding potential is given by (4.15).
4.3 Nonlinear Interference
Formulas (1.18)-(4.19) describe the interaction of X-harmonic solitons. Al-
though we cannot prove it, it certainly seems to be true that each N-harmonic
soliton (4.18) is a merornorphic function with at most N real poles. The 2-
harmonic soliton solution of the NLS equation is:
where

Formula (4.20) makes sense only when X2 # Tt&. Yet for X2 = XI + nx, n E Z, the concept of superposition of two harmonic solitons can be naturally
extended to the case Xî = &A1 by taking the limit of (4.20) as X2 t XI and
72X2 t -flX1. This yields a harmonic soliton with:
0 and p satisfying
d For pi's large we can neglect the - (72 X2) term to get,
dX2

Let us tàke a fi-;? region D= t ( izj O < t < T) ~vi;k - - -
1 osci&tory f o m (0.23) with amplituda -:
pk
ing in D is of theform:

Away from the poles the superpositioning of the hamoaic solitons is pract icdy
reduced to adding their absolute values, just like in the lineu case. In Linear
theory this phenomenon is called linear interference so we cal1 its nonlinear
analogue nonlinear interference. It is exactly this phenomenon that is responsible
in Linear theory for the formation of wavepackets. The nonlinear analogue also
leads to the formation of wavepackets, in this case nonlinear. Since there is no
theory for the nonlinear case, we simply construct some of the wavepackets.
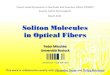
Figure 5 shows the time evolution of the 8 harrnonic soliton solution. The
N-harmonic soliton solution does not necessarily vanish outside D as x -+ Ica.
Cornparison with the linear Schrodinger equation suggest that by choosing An's
sufficiently small such that A, 5 A,, + lAAl then we can choose X and T
arbitrarily large. This allows us to create a wavepacket of desired magnitude
and halflife. Equations (4.11), (4.15) have been used to verify this numerically.
Figures 6-9 shows some other interesting properties exhibited by the harmonic
soliton solutions of the NLS. The values of p, are chosen to be of the forms
pon3, pon2, pan and po so that we can mimic the 6 function with its antideriva-
tives. Figures 8 and 9 shows the time evolution of sorne N - wave type and
&type solutions respectively.


CL.
Z'L [ i - - * .-e.7
I . - ,.A.. 2 .-
i - I
Figure 5 (continued)

Figure 5 : T h e evolution of thz w~vepac~ker gerierâied b y 8 harmooic solitors witb P = (JI , , .. ., p z ) , p, = -65000 eo(3(X, - &,,)');
A = ( ) A, = 3 +0.066(n - 1) and r = (0 ,..., 0).

Fig .6 (a )
a/ 4-
- 2 4 . .
a " O : s E s 9 +
Fig. S ( a )
Figure 7 : The 13-ht-monic Iofibo~? solutior! af t = O with p = (P 1: . . - : P ~ ~ ) ~ pn = -,2.8n2x1O7, I? = (2, ..-, qj and (c) X = .-Zn (b) X = . l Ïn .

Figure 8 : T h e evdu tion CE the wavepah t generated by i O haraonic solitoro m'th P = ( p l , . . . :p~& p, = -1.jn3 x 10'; A = (XI , ...; &O),
A, = O.id(, - 1) and l? = (0, ..., 0).

"i-
Figure 9 : Tine evolution of the wavqaciiet ,o+nerated by IO h ~ m o n i c oolitons with P = ( p l , .... p,,), p, = -2.2n x 1 0 4 ; 11 = ( x ~ ;...,
A, = 0.13(n - 1) and I' = (5: ...., $).


Conclusion
Although we could not apply the Fourier transform method to solve the NLS,
we were still able to obtain exact solutions using the concept of nonlinear mod-
ulation. Using the analogy between Fourier analysis and the Inverse Scattering
Theory used for solving the Cauchy problem foi integrable equations me were
able to show that the nonlinear defocusing Schrodinger equation permits nonlin-
ear modulation. Also using the N-harmonic soliton solutions we were also able
to construct localized in space solutions for the nonlinear defocusing Schrodinger
equation, the so called wave packets.
Some other possible extensions that can be made in this thesis is the further
simplification of the the determinants found in (4.15), so ive could possibly write
the general N-harmonic soliton solutions in an applicable form for large N. One
can also try producing an analytic proof for the existence of N-real poles for the
N-harmonic soliton solution or question the existence of a generalized formula
similar to (4.22) for .N 2 3 that would ultimately link the KdV and the NLS.

Appendix
Matlab Program (1)
clear xp up M disp('started')
% Input Area
r e m f ake=(\pi/3)*2n(1/8)*1.012345678901*exp(1)/2 .71;
delxi=O.l9*remfake; half dim=8 ; PO=-11000 xio=f:halfdim; for n = l:halfdim, xio (n) =delxi* (n-1) ; end
halfgam=l : half dim; half gam= (pi /2) *ones (1, half d i m ) ;
halfp=i:halfdim; for n = Lhalfdim, half p (n) =-pO*n' (0 .5) ; end

% End of Input Area
d e l t ax= (xf -x0) /nu= ;
nx=i : numx; xp=xO-deltax + nx*deltax;
d e l t a t = ( t f - t 0 ) / n u t ; n t = l : numt ; tp=tO-deltat+nt*deltat ;
l a = i : dim ; for n=l :ha l fd im, lam(2+n-l)=i*epss+xio (n) ; lam(2*n) =-i*epss+xio (n) ; end
gam=l :dim; f o r n=i :ha l fd im, gam(2*n-l)=halfgam(n); gam (2*n) =halfgam(n) ; end
p=1 :dira; for n=l:halfdim,

p (2+n- 1) =ha l f p (n) ; p (2*n) =-half p (n) ; end
d i s p ( ) p l o t t i n g loop s t a r t e d ) )
AN=eye(dim) ; AD=eye (dim) ; b =l:dim; for it=l :nunt , t = t p (it) ; xO=xO+frameshift ; xf =xf +f rameshif t ; xp=xO-deltax + nx*deltax; end
up=l : nurmr; upl=l:numx; for ix = l:nunx,
f o r n= l:halfdim,
b (2+n) =e~p(l*i*gam(n)+2*e~ss*~ (2*n) ) *(exp (2*i*lam(2*n) *xp (ix) + 2*i*t* (lam(l*n)) -2)) ; lamf ac=l ; f o r k=i:halfdirn,
if kd=n lamf a c = l a m f ac*(lam(2*n-1) -lam(2*k-1)) (lam(2*n) -lam(2*k) ) * (-1) ; else qqqq=l ; end
end b (2*n-1) =b(2*n-1) *lamfac ; b (2*n) =b (2*n) *con j ( l amf ac) ; end
for n = i:dim,

f o r m = i :ha l fd im, AD (n ,2*m-1) =lam(n) (m-1) ; AD(n,Z*m) =(lam(n) ^(m-1) )*b (n) ;
end end AN=AD ; f o r n=l:dim, AN(^, dim) =lam(n) - (dim) ; end
up ( i x ) = real (de t (AN) /de t (AD) ) ; up 1 ( i x ) = real ( i*det (AN) /de t (AD) ) ; end
f i g u r e ( i t ) plot (xp , up) ax i s (CxO,Xf ,y~ ,y f I ) v a l u e o f t = t print -dps -append pusa.ps
figure (i t+numt) p l o t (xp a up l ) =is(CxO,xf ,yO,yfl) v a l u e o f t = t p r i n t -dps -append pusa .ps

Matlab Program (II)
% Input Area
xiO=3 ; half dim=10 ;
gam=i: half dim;
gam= (O) *ones (1, ha l f d i m ) ;
x i = l : half dim; for n = 1:halfdim, xi (n) =xiO+delxi* (n-1) ; end
p=i:halfdim; for n = l:halfdim, p (n) =p~*exp (2* ( x i (n) -xiave) -2) ;
end

% End o f Input Area
d e l t ax= (xf-x0) /numx; d e l t a t = ( t f - t 0 ) /nurat;
nx=l:numx; n t = l : numt ;
b '1: h a l f dim; mu =i:halfdim;
frameshift=framespeed*deltat; disp( ' p l o t t i n g l o o p s t a r t e d ' )
f o r it=l:numt, t = t p ( i t ) ; xp=xO-deltax+nx*delta;
for ix = i:numx,
for n= i:halfdim, b (n) =exp (i*gam(n) +2*i*xi (n) *xp ( i x ) +4*i*t* (x i (n) ) -2) ;
mu (n) =-2*i* (P (n) -xp (ix) -4*t *xi (n) ) ;

end
f o r m = Lhalfdim, for n = L h a l f d i m ,
AD (m ,2*n- 1) =xi (m) " (n-i ) ; AD(m,2+n) =(xi(m) ̂ ( I I - l ) )*b(m) ;
AD (half dim+m, 2*n- 1) = (n- 1) *xi (m) (n-2) ;
AD (half dim+m, 2*n) = (n-l+mu (m) *xi (m) ) * . . .
(xi (m) A (n-2) ) *b (m) ; end
AD(halfdim+m,2 ) = mu(m)*b(m) ; end
AN=AD ; f o r m=i:halfdirn,
AN (m, dim) =x i (m) " (half dim) ;
AN(ha1f dim+m, dim) =ha l f dim*xi (m) (half dim-1) ; end
up (ix) = imag(-2i*det (AN) /det (AD) ) ;
end
f i g u r e ( i t ) p l o t (xp , up) a x i s ( C x 0 , ~ , , 0 , y f 1 ) valueof t=t p r i n t -dps -append pusa .ps
xO=xO+f rameshift ; xf=xf+frameshi f t ;
end
disp ( ' f inished ' )

Bibliography
[l] V. E. Zakharov and A. B. Shabat, Sou. Phys., JETP 34 (1972), 62.
[2] Whitham, G. BI Linear and ~Vonlinear GVÜues, 1974: Wiley, New York.
[3] Kovalyov, M, Modulating Properties of Hamonic Breathers Solitons of
K d V, to be published.
[4] G. Neugebauer and R. Meinel, General N-soliton solution of the .4liW class
o n arbitrary background Phys. Lett. 100 A (1984) 9.
[5] Ablowitz, M. J and Clarkson, P-A, Solitons, iVonlinear Evolution Equations
and Inverse Scattering, 1991, London Mathematical Society Lecture Note
Series 149, Cambridge.
[6] Matveev, V. B and Salk, M. A, Darboux Transformations and Solitons,
1991, Springer Series in Nonlinear Dynamics, Springer-Verlag, Berlin Hei-
delberg.
[7] John, F , Partial Differential Equations, Springer-Verlag, 1952.
[a] Strauss, W. A, Partial Di'erential Equations (an introduction), 1992, Wi-
ley, New York.

[9] Zakharov, V . E , Manekov, S . V, Novikov, S , Pitaevskii, L. P, Theory of
Solitons (The Inverse Sattering hifethod), 1984, Consultants Bureau, New
York.
[ I O ] Akhmanov, S.A, Khokhiov, R-V, Sukhonikov, A.P: Laser Handbook, ed . b y
Arecchi, F-T, Schulz-Dubois, E. O , North Holland, Amsterdam 1982.
[Il] Kovalyov, M and Barran,S.K, -4 note on slowly decaying solutions of the
defocusing Nonlinear Schrcïdinger Equation, preprint .
[12] Smoller, Joel, Shock Waues, Reaction-Diffusion Equations, Springer-
Verlag, 1994.
[13] Agrawal, Govind,iVonlinear Fiber Optics, 1989, A C A D E M I C PRESS. INC.
[14] D. J. Korteweg and G. de Mies, On the change of form of long one waves
advancing i n a rectangular canal, and on a nem type of long stationary
waues, Phil. Mag. 39 1985, 422-413.
E. Fermi, J. Pasta, and S. M. Ulam, Sttldies in n o n h e a r probferns, Techincal
Report LA-1910, Los Almos Sci. Lab.
N. J. Zabusky and M. D. Kruskal, Interaction of nsolitons'' in a collisionless
plasma and the recurrence of initial states, Phys. Rev. Lett. 15 1965, 240-
243.
C. S . Gardner, J . M . Green, M . D. Kruska1,and R. hl. Miura, ilfethod for
solving the Korteweg-de Vries equation, Phys. Rev. Lett. 19 1967

P I Korteweg-de V'ries equation a n d generaiizations. VI iVfethods for
exact solutions, Commun. Pure -4ppl. Math. 27 1974, 97-133.
[19] Kay, I and Moses, H, E Refl ectionless Transmission through Dielectrics and
Scattering Potentials, Journal of Applied Physics, Vol. 27, 12, 1956.