Embed Size (px)
Citation preview

Modular bimorph mirrors for adaptive optics
Goncalo Rodriguesa, Renaud Bastaitsa, Stephane Rooseb, Yvan Stockmanb,Sylvia Gebhardtc, Andreas Schoeneckerc, Pierre Villond and Andre Preumonta
a Universite Libre de Bruxelles, 50 av. F.D. Roosevelt CP165/42, B-1050,Brussels, Belgium;
b Centre Spatiale de Liege, Parc Scientifique du Sart Tilman, Avenue du PreAily, B-4031, Angleur, Belgium;
c Fraunhofer Institut fur Keramische Technologien und Systeme,Winterbergstr. 28, Dresden, 01277, Germany;
d Universite de Technologie de Compiegne, BP 20529, 60205 Compiegne cedex,France
1

ABSTRACT
This paper examines the possibility of constructing deformable mirrors for adaptive optics with
a large number of degrees of freedom from silicon wafers with bimorph piezoelectric actuation.
The mirror may be used on its own, or as a segment of a larger mirror. The typical size of
one segment is 100-200 mm; the production process relies on silicon wafers and thick film PZT
deposition technology; it is able to lead to an actuation pitch of the order of 5 mm, and the
manufacturing costs appear to grow only slowly with the number of degrees of freedom in the
adaptive optics.
Keywords: Adaptive optics, High order adaptive optics, Segmented mirrors, Wavefront cor-
rectors, Bimorph mirrors, Silicon mirrors, PZT actuator, Thick film deposition
1. INTRODUCTION
Adaptive optics (AO) has revolutionized astronomy by correcting in real-time the aberrations
introduced by atmospheric turbulence using deformable mirrors with hundreds of actuators.
However, attaining diffraction limited imaging in the visible with the current 8-10 m class
telescopes will require deformable mirrors with thousands of degrees of freedom1 (d.o.f.) and
correction of turbulence in the future 30 m class Extremely Large Telescopes will require up
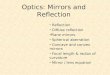
to tens of thousands of degrees of freedom.2,3 Figure 1 illustrates the increase in the number
of degrees of freedom of correction required for imaging (Strehl = 0.5) when the diameter of
the primary mirror increases. These curves were computed using the residuals of phase error
variance in terms of the corrected Karhunen-Loeve modes presented in.4–6
Scaling up the current wavefront correctors and preserving their actuation pitches will result
in deformable mirrors with several meters of diameter constituting very complex mechanisms.
Such a high complexity will raise issues on development and fabrication costs as well as reliability
and maintenance. Moreover, controlling tens of thousands of coupled degrees of freedom of one
deformable mirror with a bandwidth of 100 Hz will constitute a challenge on its own. The
2

1 10 50
10
10
10
10
100
1
3
4
2
# D
OF
M Diameter, m1
NearInfr
ared, 2.5
mVisible, 0.5
m
Figure 1. Evolution of the number of degrees of freedom of the AO with the diameter of the primarymirror M1 in order to achieve diffraction limited imaging, Strehl = 0.5.
problem will become even more complicated if we consider that the scaling up of current weights
will most certainly result in a higher dynamic interaction with the light-weight supporting
structures and the other control systems of the telescope∗.
∗This especially is true if the AO is part of M2.
3

10
100
400
Bimor
phs/
Unimor
phs
Voice-coil
Prop
osed
Concep
t
(Estimate)
# DOF
210
110 10 10
2 3 4
Pric
e, k €
Piez
o-st
acke
d
Elec
tros
tati
c
Mem
bran
esM
EMS
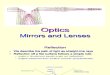
Figure 2. Trends in cost (in kEuros/d.o.f.) of existing commercial AO mirrors.
The wish list for future AO systems is as follows:
• Decrease cost per d.o.f.
• Reduce pitch (increase actuator areal density).
• Reduce weight of AO systems, to reduce control-structure interaction.
• Achieve stroke of ∼ 10µm.
• Simplify the control system (simpler and faster control algorithms).
This paper presents a modular system whereby the AO mirror is built as a segmented mirror
with hexagonal segments consisting of Si wafers with PZT bimorph actuation. The PZT thick
film is deposited by screen printing, whose cost is to a large extent independent of the actuator
areal density, and is well adapted to mass production. The expected advantage of the proposed
4

concept in terms of price per degree-of-freedom of correction is shown in Figure 2, when compared
to other technologies of deformable mirrors.
The paper is focused on three steps towards a full demonstration of a complete segmented
AO mirror:
(1) The manufacture of a single AO mirror with the thick film deposition technology and
the verification that the mirror behaves according to numerical predictions.
(2) The verification that the bimorph mirror possesses the required performance in terms of
stroke, spatial resolution and optical control capability.
(3) A numerical study has been conducted with a finite element model of piezoelectric lami-
nate shells. The study has been conducted on a set of 7 segments equipped with a representative
electrode layout; additional linear PZT actuators are provided for piston and tilt; the study re-
veals an exceptional morphing capability of the segmented mirror, with a nearly continuous
transition of the mirror shape from one segment to the next.
We believe that the quality of the manufacturing process, its good repeatability, spatial resolu-
tion and control capability are good indicators of the quality of the concept. A full demonstrator
involving several segments (3 or 7, depending on funding) is currently under construction. The
paper is organized as follows: Section 2 discusses briefly the various options of deformable mir-
rors; section 3 describes the thick film deposition used in this study; section 4 reports on the
control experiments which have been conducted. Section 5 describes the concept of segmented
flexible mirror and presents a numerical simulation. Section 6 draws some conclusions.
2. DEFORMABLE MIRRORS FOR ADAPTIVE OPTICS
In order to compensate the turbulence-induced wavefront error, AO mirrors must provide a
stroke of several microns with a control bandwidth of the order of 100 Hz. The number of
actuators is related to the number of optical modes to be corrected, which depends on the size
5

of the light collecting area. The size of the AO mirrors is related to the field of view, because
the field angles in the deformable mirror image space are multiplied by the ratio of the primary
mirror diameter to that of the deformable mirror.
There are several actuation technologies available for flexible AO mirrors, depending on
their size and stroke: linear actuators pushing at the back of the mirror,7 piezoelectric bimorph
mirrors,8,9 electrostatic actuators,10,11 electromagnetic actuators12 and carbon fibre reinforced
plastic mirrors with embedded piezoceramic actuators.13 Piezoelectric actuators exhibit hys-
teresis, while electrostatic actuators are nonlinear; electromagnetic actuators tend to require
more space and weight than the others. MEMS mirrors are all electrostatic; they can achieve a
very small pitch, but they are limited to very small sizes.
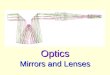
The tailoring of the electrode deposited on the back of a piezoelectric bimorph mirror plays
an important role in the wavefront correction that can be generated, and keystone shapes like
those depicted in Figure 3 (left) are especially suited to the generation of the optical aberrations
described by Zernike polynomials. However, in this study, we have opted for a honeycomb
electrode shape, Figure 3 (right), which provides a homogeneous geometry that can be extended
to larger, segmented optics. Thin Si wafers covered with a PZT layer may be modelled as
piezoelectric laminate plates.14,15 Finite element studies show that the use of smaller electrodes
in the corner of the segments help in achieving a smooth transition from one segment to the
next. An interesting feature of our technology is that the manufacturing cost of one segment is
almost independent of the complexity of its electrode.
3. SILICON BIMORPH MIRRORS
The Fraunhofer Institute for Ceramic Technologies and Systems (IKTS) has developed a method
for depositing thick films of PZT materials on silicon substrates.16,17 Gold electrodes and PZTs,
initially in the state of pastes, are deposited by screen-printing and are then sintered, undergoing
a phase change and rigidifying.
6

Optical aperture
Figure 3. Left: Electrode layouts used in commercial adaptive optics using bimorph designs. Eachquarter shows a different keystone design with circular symmetry. Right: Electrode layout of themodular hexagonal segments.
The steps of the deposition process are depicted in Figure 4. First, a continuous gold film,
that serves as the mass electrode common to all the actuators, is screen-printed and sintered.
Then, the PZT pastes are screen-printed through a mask with the negative of the actuator patch
layout and sintered. Finally, the individual gold electrodes are screen-printed through the same
mask on the top of the PZT patches and sintered. The accuracy of the screen-printing process
is typically of ±200 µm
Since the shapes of the PZT patches are completely defined by the form of the mask, once
the masks are conceived, their number and their layout does not influence the fabrication time
or the price. The same applies to electrical connections if flex-circuits are used.
The PZT patches are 80 µm thick, forming a very compact and lightweight laminate. Still,
as will be seen below, the amplitudes of deformation are sufficient for applications in adaptive
optics. This method of deposition by screen-printing circumvents the common problems that
arise, when fabricating and polishing very thin plates of PZT and gluing them to a substrate.18
7

a)
b)
c)
d)
Figure 4. Silicon bimorph mirror manufacturing steps (a) ground (gold) electrode on the back side of thewafer. (b) 80 micron screen printed PZT array (green) (c) PZT array after sintering. (d) Independenttop electrodes (gold).
8

O-ring
=110 mm
PZT with gold electrode
=65 mmActive aperture
Si Wafer
=150 mm
Ground electrode
=100 mm
Figure 5. Layout of the bimorph mirror used in the control experiment.
Moreover, all the steps of this process can be automated which, given the huge availability of
silicon wafers, opens the door to the low-cost mass production of bimorph mirrors.
For the sake of demonstrating the manufacturing technology on the one hand, and verifying
the performance on the other hand (stroke, spatial resolution, optical control capability), a
bimorph mirror with the layout of Fig. 5 was manufactured; it consists of 91 hexagonal actuators
arranged in a honeycomb with a pitch of 9 mm and deposited on a commercially available silicon
wafer with 150 mm diameter. The silicon wafer is 700 µm thick and the PZT patches are 80 µm
and are sandwiched by gold electrodes 14 µm thick. The maximum allowed voltage is 140 V.
In the test set up, the mirror is simply supported by two rubber O-rings with 100 mm diameter
and the active aperture where the shape of the mirror is controlled has 65 mm diameter.
4. CONTROL EXPERIMENT
An active optics bench has been set-up jointly by the Universite Libre de Bruxelles (ULB) and
the Centre Spatial de Liege (CSL) with the aim of assessing the capability of a bimorph mirror
produced by screen-printing of performing wavefront correction. The bimorph mirror appears
on the lower left corner of Figure 6 inside its support and is electrically connected to the voltage
9

Voltage
Amplifiers
Bimorph
Mirror
Telescope
Shack-
Hartmann
Figure 6. Experimental set-up for the closed loop control experiment. The mirror (in its circularsupport) is at the front, with the power electronics.
amplification electronic board. The voltage amplification circuit consists of three Supertex
integrated circuits and a low number of resistors and capacitors for electrical protection. The
voltage amplification circuit is thus very simple, compact and low cost. Each HV257 chip costs
less than 200 euros and is a sample and hold amplifier outputting 32 channels in parallel with
a voltage amplitude of 300 V .
The measurement of the deformations induced on the mirror is performed by a Shack-
Hartmann (S-H) wavefront sensor which appears on the right side of Figure 6. This sensor
is constituted by an array of 101 x 101 micro-lenses enabling the optical metrology of the sur-
face of the mirror with very high resolution. The laser source and the CCD camera are located
in the S-H box, and the telescope magnifies an optical aperture of 10 mm diameter on the CCD
camera to an aperture of 100 mm diameter on the mirror surface.
The closed-loop shape control experiments were carried out statically and consisted of de-
10

forming the reflecting surface of the mirror with the shapes of the first 33 Zernike modes with
curvature (ISO10110-5 convention).
Due to the fact that the piezoelectric actuators utilized can mostly sustain positive voltages,
the shape control experiments were carried out relative to a reference configuration and consist
of 3 steps: (1) Application of an off-set of 80 V to all the electrodes of the bimorph mirror, and
recording the resulting deformation of the mirror as a reference. (2) Application of the set of
voltages computed for generation of the shapes of the Zernike modes added of an off-set of 80
V. (3) Subtraction of the reference to the second induced deformation.
Two control experiments have been conducted: (i) a closed-loop experiment using the Jaco-
bian of the mirror determined experimentally, aimed at evaluating the capability of the system
to correct high order optical aberrations, and (ii) an open-loop control experiment using the
Jacobian obtained numerically, to evaluate our capability to model the system (it may also be
regarded as an estimate of the quality of the manufacturing process).
4.1 Closed-loop experiment
The closed-loop experiment does not rely on any numerical results; the Jacobian matrix J re-
lating the voltage applied to the electrodes, v, and the optical (Zernike) modes zo is determined
column by column by applying a voltage to one electrode at a time. Each column of J contains
the modal decomposition of the influence function of the respective electrode, i.e. the deforma-
tion of the mirror when a voltage is applied to that specific electrode and 0 V are applied to
all the others. In this experiment, 60 V was applied to the electrode for which the influence
function was being determined and 0 V to the remaining electrodes. This reflects a compromise
between a high amplitude of deformation of a single electrode, which minimizes the sensitivity
to measurement noise, and reduces the non-linearities due to hysteresis under high electrical
fields.
The voltages v to be applied for the generation of each mode were calculated by multiplying
11

Defocus
4.5 m
Astigmatism
Tetrafoil
5 m
Spherical Aberration
1 m 2.5 m
20 V
80 V
140 V
20 V
80 V
140 V
Figure 7. Example of closed-loop figure control: reconstructed surface figure and voltage applied to thepiezo array.
12

the pseudo-inverse of the Jacobian matrix J by the target modal decomposition zo of the shape
to be imposed on the mirror:
v = J+zo. (1)
For generating a particular Zernike mode, the corresponding component of zo is assigned a
specific finite amplitude; all the other components are assigned zero.
Constructing J as described above and applying Eq. (1), the set of voltages to be applied
was then scaled in order to fit in the range 20 V to 140 V and centered in the 80 V off-set. This
ensures the maximum amplitude of deformation that can be obtained with an off-set of 80 V
and an amplitude of 120 V .
Due to the non-linearities of the system, the procedure described above does not guarantee
that the modes being controlled to 0 are entirely absent. Thus, after a first control attempt,
further iterations are required in order to reduce the presence of these spurious modes. These
iterations consist of determining the variations of the voltages to be applied ∆V that compensate
the residual coefficients zres from the previous iteration. If z is the decomposition in Zernike
modes of the surface generated in the last iteration then the residual coefficients are computed
by:
zres = zo − z (2)
and, the correction to the applied voltages is given by:
∆V = J+zres (3)
Figure 7 shows the shapes measured experimentally with respect to the reference position
induced by an off-set of 80 V applied to all the electrodes. These refer to the generation of
13

33 Controled Modes
3
35 3
35
Requested
Mode
Zi
Figure 8. Closed loop control of the 33 Zernike modes. Controlled modes vs. requested ones.
the shapes of defocus, astigmatism, spherical aberration and tetrafoil. Figure 7 also presents
the spatial distribution of the applied voltages within the honeycomb array and in relation
to the optical aperture. The amplitudes of deformation achieved are sufficient for the needs
in adaptive optics with the mode of defocus reaching 5 µm peak-to-valley and the mode of
astigmatism reaching 4.5 µm.
Figure 8 depicts the modal decomposition of the induced relative deformation when trying
to generate the Zernike modes 3 to 35. In each case, the amplitude of the decomposition is
normalized by the amplitude of the generated mode. It can be clearly seen that it was possible
to generate each mode without significantly cross-exciting the remaining modes under control.
4.2 Open-loop control experiment
Another interesting comparison has been performed: The Jacobian matrix has been computed
numerically, using a finite element code for piezoelectric shells,15 and the voltages to be applied to
achieve a given mirror shape have been computed numerically. These voltages have been applied
to the experimental set-up, and the experimental shape of the mirror was found in excellent
agreement with the numerical predictions as patent in Figure 9. This is a good indicator of the
quality of the manufacturing process and of the relatively small influence of the hysteresis.
14

5.4 mm
Numerical Simulations Open-loop Experimental Results
4.9 mm
3.6 mm
2.8 mm
Defocus
Astigmatism
Trefoil
Tetrafoil
Figure 9. Comparison between numerical simulations and open-loop shape control experiments withnumerically computed voltages.
15

5. DEFORMABLE SEGMENTED MIRRORS
The thick film deposition used in this study, combined with flex-circuits for connectics and low-
cost electronics for control, has the potential for being extended to a large number of electrodes
with moderate cost. Commercially available Si wafers have a maximum diameter of 300 mm; this
means that, with an actuator pitch of 5 mm, one could possibly fit as much as 2500 electrodes
on a single mirror. However, with the modular approach developed here, one can build larger
segmented deformable mirrors by modularly assembling hexagonal silicon bimorph mirrors with
an electrode pattern similar to that represented in Figure 3; the curvature of these mirrors is
induced by an array of PZT patches covering the entire back of the segment.
In this modular concept, the distribution of the patches in a honeycomb array confers homo-
geneity and enables the scaling up. The relative alignment and co-phasing between the segments
is achieved by means of linear actuators having a stroke of about 50 µm and which actuate each
segment in piston, tip and tilt. There are several possible arrangements of the linear actuators
to form a kinematic mount, in order to release the in-plane thermal stresses. Figure 10 illus-
trates the combination of in-plane actuation characteristics of bimorph deformable mirrors with
the rigid body actuation characteristics of segmented mirrors. Assembly and maintenance will
privilege configurations in which the segments are completely autonomous and identical. The
assembly of the segments with a minimum gap will be easier if all the components of each module
lie within the foot-print of the reflecting surface of each segment as illustrated in Figure 11.
In the example of Figure 11, an assembly of 7 segments of 200 mm diameter, with 127
bimorph patches each, presents more than 520 degrees-of-freedom within the largest circular
aperture that can be defined by the assembly and with a pitch of 16 mm. Since the thick film
deposition method described in section 3 allows a significantly lower pitch (in the order of 5
mm), a significant increase of the resolution of the actuators is possible. The various segments
are supported by active kinematic mounts attached to a rigid CFRP support structure, which is
itself, if necessary, provided with piston-tip-tilt actuators, or mounted on an hexapod (depending
16

Piezo
ActuationPiston-Tilt
Actuation
a) Segmented mirror
b) Bimorph mirrorc) Actuator array TiltPiston
Figure 10. This concept combines the rigid body mode control (piston, tip-tilt) with the control ofhigher order aberrations with bimorph silicon mirrors. (a) Segmented mirror. (b) One segment withbimorph actuation. (c) Geometry of the actuator array.
on application).
One big advantage of this configuration is that the control of the curvature of various seg-
ments is totally decoupled, and identical, leading to the possibility of sensing and correcting in
parallel all the portions of the wavefront corresponding to each segment. However, the wavefront
metrology (including co-phasing the segments) is a very challenging problem which is outside
the scope of this study.19,20
Finite element numerical simulations with the material properties of the experiment de-
scribed in section 4 demonstrate the capability for deforming this assembly of mirrors in a
highly continuous manner. As an example, the mode-shape of 5th order coma was generated
inside a 200 mm aperture with the amplitude required for correcting atmospheric turbulence in
the visible in a VLT class telescope. A Fried parameter of ro(0.5 µm) = 0.12 m and a diam-
eter of the primary mirror of 8.1 m demand a correction of the component of 5th order coma
present in the wavefront with a phase root-mean-square (RMS) of 1.16 rad, which requires a
17

Mirror Segment
Control
ElectronicsBipod Kinematic Mount
With Linear Piezo Actuator
Stroke < 50 m
Piezo Actuator
Array
Flexi CircuitCoarse Actuator
Stroke ~ 50 mm
CFRP
Support
Structure
Figure 11. Segmented bimorph mirror: CAD view of a group of seven segments on its support structure.The size of a segment is between 100 mm (represented) and 260 mm.
18

a)
b)
Figure 12. Numerical simulation of the generation of the mode of 5th order coma by an assembly of 7hexagonal bimorph mirrors (a) with detail of the deformation inside the active aperture (b).
deformation of the mirror with 46 nm RMS. The capability of the assembly to generate such
a deformation is illustrated in Figure 12 for an assembly of 7 segments with 133 bimorph and
3 linear actuators each, totalizing approximately 550 actuators within the inscribed aperture.
The mirror approximates this mode of 5th order coma with an error of 0.61 nm RMS.
Figure 13 depicts the influence that the refinement of the electrodes along the edge has
on the continuity of deformation between segments. A zoom of the deformation within the
dashed box is presented for 3 electrode configurations. Electrode configuration a) consists of
a regular honeycomb of 61 actuators in which those along the edge are extended to the edge
of the segment. In configuration b) the patches at the corners of the segments were split in
two, resulting on a total of 67 actuators. Configuration c) consists of a more refined honeycomb
with split corner patches totalizing 133 actuators and in which the actuators along the edge
have about half the size of the internal ones. This configuration was used to produce the global
19

Mirror shape, W
a)
b)
c)
Electrodes at the edge
Figure 13. Detail of the deformation produced by the assembly of bimorph mirrors illustrating thecontinuity between segments achieved for different layouts of actuators.
20

deformation in Figure 12. Table 1 quantifies the improvement achieved by this sequence of
refinement in terms of RMS error in approximating the 5th order coma and maximum vertical
discontinuity between the segments.
6. CONCLUSIONS
This paper describes a modular bimorph mirror for adaptive optics applications. The mirror
consists of a Silicon wafer covered with an array of thick film PZT deposit with honeycomb
electrodes. The mirror may be used on its own, or as a segment of a larger mirror. The
current limit on the pitch of the thick film deposition is about 5 mm; thus, with the current
size of the wafers, a single mirror may have up to 2500 independent electrodes. The quasi-
static behavior of the mirror has been found in very close agreement with numerical finite
element predictions. The ability of this mirror to compensate optical aberrations similar to
those encountered in adaptive optics has been demonstrated (stroke, spatial resolution, optical
modes control capability). Finally, the possibility of constructing large deformable mirrors by
assembling segments has been discussed. The manufacturing costs appear to grow only slowly
(linearly or less) with the number of degrees of freedom in the AO (Figure 2).
ACKNOWLEDGMENTS
Goncalo Rodrigues acknowledges Fundacao para a Ciencia e a Tecnologia, (FCT), Portugal, for
his PhD grant SFRH/BD/21732/2005 and Renaud Bastaits acknowledges Fonds National de la
Recherche Scientifique, (FNRS), Belgium, for his FRIA PhD grant FC76554.
REFERENCES
1. R. Arsenault, R. Biasi, D. Gallieni, A. Riccardi, P. Lazzarini, N. Hubin, E. Fedrigo, R. Donaldson,
S. Oberti, S. Stroebele, R. Conzelmann, and M. Duchateau, “A deformable secondary mirror for
the VLT,” in “Advances in Adaptive Optics II.”, , D. Bonaccini Calia, B. L. Ellerbroek, and
R. Ragazzoni, eds. (SPIE-6272, 2006), p. 62720V.
21

2. N. N. Hubin, “Adaptive optics status and roadmap at ESO,” in “Advancements in Adaptive
Optics,” , D. Bonaccini Calia, B. L. Ellerbroek, and R. Ragazzoni, eds. (SPIE-5490, 2004), pp.
195–206.
3. D. T. Gavel, “Adaptive optics control strategies for extremely large telescopes,” in “Adaptive
Optics Systems and Technology II,” , R. K. Tyson, D. Bonaccini, and M. C. Roggemann, eds.
(SPIE-4494, 2002), pp. 215–220.
4. G. M. Dai, “Modal compensation of atmospheric turbulence with the use of Zernike polynomials
and Karhunen-Loeve functions,” Journal of the Optical Society of America A 12, 2182–2193
(1995).
5. G. M. Dai, “Modal wave-front reconstruction with Zernike polynomials and Karhunen-Loeve
functions,” Journal of the Optical Society of America A 13, 1218–1225 (1996).
6. M. C. Roggeman, Imaging Through Turbulence, The CRC Press Laser and Optical Science and
Technology Series (CRC Press, 1996).
7. J. W. Hardy, J. E. Lefebvre, and C. L. Koliopoulos, “Real-time atmospheric compensation,”
Journal of the Optical Society of America (1917-1983) 67, 360–369 (1977).
8. F. Forbes, “Bimorph pzt active mirror,” in “Active Telescope Systems,” (SPIE-1114, 1989), pp.
146–151.
9. J.-P. Gaffard, P. Jagourel, and P. Gigan, “Adaptive optics: Description of available components
at laserdot,” in “Adaptive Optics in Astronomy,” , M. A. Ealey and F. Merkle, eds. (SPIE-2201,
1994), pp. 688–702.
10. G. Vdovin and P. M. Sarro, “Flexible mirror micromachined in silicon,” Applied Optics 34, 2968–
2972 (1995).
11. D. Dagel, W. Cowan, O. Spahn, G. Grossetete, A. Grine, M. Shaw, P. Resnick, and J. Jokiel, B.,
“Large-stroke mems deformable mirrors for adaptive optics,” Journal of Microelectromechanical
Systems 15, 572–583 (2006).
12. R. Biasi and D. Gallieni, “MMT adaptive secondary prototype development,” in “Adaptive Optical
System Technologies,” , D. Bonaccini and R. K. Tyson, eds. (1998), pp. 858–863.
22

13. J. K. Durr, R. Honke, M. von Alberti, and R. Sippel, “Development and manufacture of an
adaptive lightweight mirror for space application,” Smart Materials and Structures 12, 1005–1016
(2003).
14. A. Preumont, Mechatronics - Dynamics of Electromechanical and Piezoelectric Systems, Solid
Mechanics and Its Applications (Springer, 2006).
15. V. Piefort, “Finite element modelling of piezoelectric active structures,” Ph.D. thesis, Universite
Libre de Bruxelles (2001).
16. E. Gebhardt, T. Rodig, U. Partsch, and A. Schonecker, “Development of micro-integrated sensors
and actuators based on pzt thick films,” in “Proc. of the 16th European Microelectronics and
Packaging Conference & Exhibition EMPC 2007,” (2007), pp. 177–181.
17. S. Gebhardt, L. Seffner, F. Schlenkrich, and A. Schonecker, “Pzt thick films for sensor and actuator
applications,” Journal of the European Ceramic Society 27, 4177–4180 (2007).
18. E. M. Ellis, “Low-cost bimorph mirrors in adaptive optics,” Ph.D. thesis, Imperial College of
Science, Technology and Medicine - University of London (1999).
19. G. Chanan, D. G. MacMartin, J. Nelson, and T. Mast, “Control and alignment of segmented-
mirror telescopes: matrices, modes, and error propagation,” Applied Optics 43, 1223–1232 (2004).
20. G. A. Chanan, M. Troy, and C. M. Ohara, “Phasing the primary mirror segments of the keck
telescopes: a comparison of different techniques,” in “Optical Design, Materials, Fabrication, and
Maintenance,” , P. Dierickx, ed. (SPIE-4003, 2000), pp. 188–202.
Electrode Configuration Global RMS Error Maximum Vertical Discontinuitya) 61 electrodes 1.60 nm 25.2 nmb) 67 electrodes 1.35 nm 18.1 nmc) 133 electrodes 0.61 nm 14.4 nm
Table 1. Performance of the electrode layouts of Figure 13 in generating the 5th order coma, in termsof global RMS error and maximum vertical discontinuity between segments.
23

List of Figures
1 Evolution of the number of degrees of freedom of the AO with the diameter of the
primary mirror M1 in order to achieve diffraction limited imaging, Strehl = 0.5. 3
2 Trends in cost (in kEuros/d.o.f.) of existing commercial AO mirrors. . . . . . . . 4
3 Left: Electrode layouts used in commercial adaptive optics using bimorph designs.
Each quarter shows a different keystone design with circular symmetry. Right:
Electrode layout of the modular hexagonal segments. . . . . . . . . . . . . . . . 7
4 Silicon bimorph mirror manufacturing steps (a) ground (gold) electrode on the
back side of the wafer. (b) 80 micron screen printed PZT array (green) (c) PZT
array after sintering. (d) Independent top electrodes (gold). . . . . . . . . . . . 8
5 Layout of the bimorph mirror used in the control experiment. . . . . . . . . . . 9
6 Experimental set-up for the closed loop control experiment. The mirror (in its
circular support) is at the front, with the power electronics. . . . . . . . . . . . . 10
7 Example of closed-loop figure control: reconstructed surface figure and voltage
applied to the piezo array. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
8 Closed loop control of the 33 Zernike modes. Controlled modes vs. requested ones. 14
9 Comparison between numerical simulations and open-loop shape control experi-
ments with numerically computed voltages. . . . . . . . . . . . . . . . . . . . . . 15
10 This concept combines the rigid body mode control (piston, tip-tilt) with the
control of higher order aberrations with bimorph silicon mirrors. (a) Segmented
mirror. (b) One segment with bimorph actuation. (c) Geometry of the actuator
array. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
11 Segmented bimorph mirror: CAD view of a group of seven segments on its support
structure. The size of a segment is between 100 mm (represented) and 260 mm. 18
24

12 Numerical simulation of the generation of the mode of 5th order coma by an
assembly of 7 hexagonal bimorph mirrors (a) with detail of the deformation inside
the active aperture (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
13 Detail of the deformation produced by the assembly of bimorph mirrors illustrat-
ing the continuity between segments achieved for different layouts of actuators. . 20
25