Embed Size (px)
Citation preview

Corpos Rıgidos
MOMENTO ANGULARMecanica II (FIS-26)
Prof. Dr. Ronaldo Rodrigues Pela
IEFF-ITA
5 de marco de 2013
R.R.Pela Corpos Rıgidos

Corpos Rıgidos
Roteiro
1 Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Roteiro
1 Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Movimento Plano do Corpo Rıgido
Quando todas as partıculas de um corpo rıgido se movemao longo de trajetorias que sao equidistantes de um planofixo, diz-se que o corpo rıgido possui um movimento plano.Ha 3 tipos de movimento plano de corpo rıgido
1 Translacao: quando cada segmento de linha sobre o corporıgido permanece, durante o movimento, paralelo a suaposicao original.
2 Rotacao em torno de um eixo fixo: quando todas aspartıculas do corpo rıgido (exceto as que se apoiam sobreo eixo de rotacao) se movem em trajetorias circulares.
3 Movimento plano geral: quando ha uma combinacao dosdois movimentos anteriores.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Movimento Plano do Corpo Rıgido
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Movimento Plano Geral
Movimento plano geral = translacao + rotacao
O sistema de eixos xy e fixo e mede a posicao “absoluta”de dois pontos A e B sobre o corpo.A origem do sistema x′y′ esta fixada a um ponto A docorpo rıgido (um ponto que geralmente tem um movimentoconhecido)Os eixos x′y′ nao giram com o corpo, eles podem apenastransladar em relacao ao sistema fixo
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Movimento Plano Geral
~vB = ~vA + ~vB/A
B esta sempre a mesma distancia de ASeu movimento (em relacao a A) pode ser caracterizadocomo uma rotacao em torno de um eixo “fixo” que passapor A
~vB = ~vA + ~ω × ~rB/A~aB = ~aA + ~α× ~rB/A + ~ω × (~ω × ~rB/A)
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Exemplo
A barra AB mostrada na Figura esta confinada a mover-se aolongo de planos inclinados em A e B. Se o ponto A tem umaaceleracao de 3,00 m/s2 e uma velocidade de 2,00 m/s ambasdirecionadas plano abaixo no instante em que a bara fica nahorizontal, determine a aceleracao angular da barra nesteinstante.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Uma vez que A e B se movem em trajetorias retilıneas, asvelocidades (e aceleracoes) destes pontos estao dirigidasao longo destas direcoesComo o comprimento da barra nao varia com o tempo,vA cos 45◦ = vB cos 45◦, ou seja, vB = vA = 2,00 m/s. ComovB/A = ωrB/A, temos: (2).(2m/s).(
√2/2) = (ω).(10,0 m),
ou seja,~ω = (0,283 rad/s)z
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Aceleracao angular:
~aB = ~aA + ~α× ~rB/A + ~ω × (~ω × ~rB/A)
(aB cos 45◦)x+ (aB sin 45◦)y = (aA cos 45◦)x− (aA sin 45◦)y
+ (10,0α)y − (0,283)2.(10,0)x
que conduz ao seguinte sistema de equacoes:{aB cos 45◦ = aA cos 45◦ − (0,283)2.(10,0)aB sin 45◦ = −aA sin 45◦ + 10,0α
Substituindo aA = 3,00 m/s2, obtemos
~α = (0,344 rad/s2)z
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento Angular
Corpo rıgido girando em torno de um eixo fixo ∆.
Componente do momento angular L∆ (ao longo do eixo derotacao):
L∆ =∑i
mi(~ri × ~vi).e∆ =∑i
~li.e∆
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento Angular
~li.e∆ = li cos θ = (miωdi)ri cos θ = miωd2i .
L∆ =∑i
miωd2i =
(∑i
mid2i
)ω.
∑i
mid2i , I∆: momento de inercia do corpo rıgido em
relacao ao eixo ∆L∆ = I∆ω
Em algumas condicoes especiais (e.g. quando ∆ e umeixo de simetria), a identidade anterior pode ser reescritana forma vetorial:
~L = I~ω
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento de Inercia
Por analogia com o momento linear ~P = M~v, ~L = I~ωmostra que o momento de inercia mede a resitencia de umcorpo a rotacao (I e como se fosse uma “massa” para arotacao).O momento de inercia mede como a massa estadistribuıda em torno de um eixo de rotacao: quanto maismassa houver proximo ao eixo de rotacao, menor sera omomento de inercia.Para um dado corpo rıgido, o momento de inercia dependedo eixo considerado, ja que a massa pode estar melhordistribuıda em torno de um eixo que de outros.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento de Inercia
Para distribuicoes contınuas de massa:
I =∑
r2i ∆mi,
No limite em que ∆mi → 0:
I =
∫r2i dm.
Distribuicao linear de massa: dm = λdl.Distribuicao superficial de massa: dm = σdA.Distribuicao volumetrica de massa: dm = ρdV .
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Exemplo
Obter o momento de inercia da haste a seguir com relacaoao eixo z.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Tomando a divisao de massas como na Figura anterior,temos:
I =
∫ L
0x2λdx = λ
L3
3=ML2
3
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Exemplo
Obter o momento de inercia do disco (massa M e raio R)em relacao ao eixo de simentria normal ao seu plano
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Considerando a divisao de massas da Figura anterior:
I =
∫(x2 +y2)σdA =
∫ R
0
∫ 2π
0r2σrdθdr = σ
R4
42π =
MR2
2
Nas tabelas, mostramos o momento de inercia paradiversos objetos com distribuicao uniforme de massa.
http://www.ief.ita.br/˜rrpela/downloads/FIS26-MomentoArea-2011.jpeghttp://www.ief.ita.br/˜rrpela/downloads/FIS26-MomentoInercia-2011.jpeg
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Teorema
Se um corpo rıgido pode ser dividido em duas partes A eB, entao seu monento de inercia (em relacao a um eixo ∆)e igual a soma dos momentos de inercia de A e B (comrelacao ao mesmo eixo).Prova: Basta dividir o domınio de integracao em A e B:
I =
∫S=A+B
r2dm =
∫Ar2dm+
∫Br2dm = IA + IB.
R.R.Pela Corpos Rıgidos
Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Teorema dos eixos paralelos
Teorema dos eixos paralelos ou de SteinerSe o momento de inercia em relacao a um eixo que passapelo CM e ICM , entao o momento de inercia em relacao aqualquer outro eixo paralelo a este e:
I = ICM +Md2,
sendo d a distancia dos eixos e M a massa do corporıgido.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Teorema dos eixos paralelos
Prova: Considere dois sistemas cartesianos com eixosparalelos, um dos sistemas esta localizado no CM
Escrevendo a expressao do momento de inercia
I =∑
r2i ∆mi.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Teorema dos eixos paralelos
Mas ~ri = ~rCM + ~ri/CM , e portanto,r2i = ~ri · ~ri = r2
CM + r2i/CM + 2~rCM · ~ri/CM , o que implica:
I =∑
r2CM∆mi +
∑r2i/CM∆mi + 2
∑~rCM · ~ri/CM∆mi,
= Md2 + ICM + 2~rCM ·∑
~ri/CM∆mi.
Como∑
∆mi~rCM =∑
~ri∆mi, tem-se~0 =
∑(∆mi)(~ri − ~rCM ) =
∑(∆mi)(~ri/CM ), donde segue
que:I = ICM +Md2.
R.R.Pela Corpos Rıgidos
Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
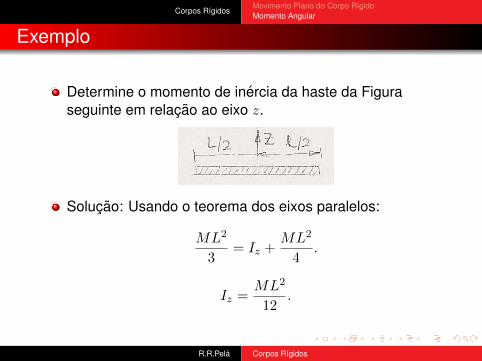
Exemplo
Determine o momento de inercia da haste da Figuraseguinte em relacao ao eixo z.
Solucao: Usando o teorema dos eixos paralelos:
ML2
3= Iz +
ML2
4.
Iz =ML2
12.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Raio de giracao
Ocasionalmente, o momento de inercia de um corpo rıgidoem relacao a um eixo especıfico e documentado emmanuais atraves do raio de giracao k. Ele e definido como:
I = Mk2 ou k =
√I
M.
O raio de giracao pode ser interpretado como a distancia(em relacao ao eixo de rotacao) na qual se estivesseconcentrada toda a massa M produziria o mesmomomento de inercia.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Teorema dos eixos perpendiculares
Seja um corpo rıgido plano com momentos de inercia Ix eIy por dois eixos (perpendiculares entre si) que estao nomesmo plano do corpo. Se o eixo z e perpendicular a x ea y, entao:
Iz = Ix + Iy.
Prova
tIx =
∫y2dm, Iy =
∫x2dm.
Iz =
∫(x2 + y2)dm = Ix + Iy.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Exemplo
Calcule o momento de inercia de um disco por um eixopassando por um diametro.Solucao: Considere o disco ilustrado na Figura. Porsimetria, temos Ix = Iy
Usando o teorema dos eixos perpendiculares:
Iz = Ix + Iy = 2Ix.
Como Iz = MR2/2:
Ix =MR2
4.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento Angular: caso geral
Componente do momento angular ao longo do eixo derotacao e L∆ = I∆ω
Mas o momento angular e um vetor paralelo ao eixo derotacao (ou entao, a ~ω)?A resposta e: geralmente nao.Entao, qual a relacao entre ~L e ~ω? Vejamos.
~L =∑i
~ri × (∆mi~vi).
Para um eixo fixo ~vi = ~ω × ~ri
~L =∑i
(∆mi)~ri × (~ω × ~ri).
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Momento Angular: caso geral
Sendo ~ω = ωxx+ ωyy + ωz z e ~ri = xix+ yiy + ziz,podemos escrever o duplo produto vetorial como:
~ri × (~ω × ~ri) = [(y2i + z2
i )ωx − xiyiωy − xiziωz]x= [−xiyiωx + (x2
i + z2i )ωy − yiziωz]y
= [−xiziωx − yiziωy + (x2i + y2
i )ωz]z
Tomando o limite em que ∆mi → 0 e reescrevendo naforma matricial, temos:
~L = I~ω
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
I =
Ixx −Ixy −Ixz−Iyx Iyy −Iyz−Izx Izy Izz
Ixx =
∫(y2+z2)dm Iyy =
∫(x2+z2)dm Izz =
∫(x2+y2)dm
Ixy = Iyx =
∫xydm
Ixz = Izx =
∫xzdm
Iyz = Izy =
∫yzdm
R.R.Pela Corpos Rıgidos
Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
I e conhecido como tensor de inercia de um corpo rıgido.Ixx, Iyy e Izz sao conhecidos como momentos de inerciaem relacao aos eixos x, y e z, respectivamenteIxy, . . . , Izy sao conhecidos como produtos de inercia.Para definir bem o tensor de inercia I e necessarioespecificar uma origem O e os eixos x, y e z.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
Se fixamos o ponto O e fazemos uma rotacao (de eixos)dada pela matriz de mudanca de base R, entao: x
yz
= R
x′
y′
z′
.Logo ~L = R~L′ e ~ω = R~ω′.Como R e uma matriz ortogonal:
~L′ = (RT IR)~ω′
O tensor de inercia nos novos eixos e:
I ′ = RT IR
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
Como I e simetrico, sempre e possıvel encontrar umconjunto de eixos ortogonais, x0, y0 e z0, em relacao aoqual o tensor e diagonal (trata-se de um problema deautovalores e autovetores).Neste caso, o tensor de inercia estara diagonalizado epode ser escrito na forma simplificada:
I =
Ix0 0 00 Iy0 00 0 Iz0
.Ix0 , Iy0 e Iz0 sao chamados de momentos principais deinercia do corpo rıgido (com relacao ao ponto O).Os eixos x0, y0 e z0 sao chamados de eixos principais deinercia.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
Quando um corpo rıgido gira em torno de um eixoprincipal de inercia ∆, podemos dizer que:
~L = I∆~ω.
A determinacao dos eixos principais de inercia e umproblema de autovetores (note que I∆ e um autovalorassociado).Existem muitos casos, entretanto, em que os eixosprincipais de inercia podem ser determinados porinspecao (no caso de um eixo de simetria, por exemplo).Dos tres momentos principais de inercia, um sera o maiore outro sera o menor de todos os momentos de inercia deeixos que passam pelo ponto O (daı a vantagem em seconhecer os eixos principais de inercia).
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Tensor de inercia
Alguns eixos principais de inercia sao dados na Figura
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Exemplo
Determine os eixos principais de inercia com relacao aoponto O. O corpo rıgido mostrado na Figura ?? e formadopor 4 massas (duas massas M e duas m) ligadas porhastes de massas desprezıveis. Considere M 6= m.
R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Izz = 4ma2 + 4Ma2 = 4a2(m+M),
Ixx = 2ma2 + 2Ma2 = 2a2(m+M) = Iyy,
Ixy = −2ma2 + 2Ma2 = 2a2(M −m), Iyz = Ixz = 0.
I =
2a2(m+M) 2a2(m−M) 0
2a2(m−M) 2a2(m+M) 0
0 0 4a2(m+M)
,Cujos autovetores sao:
001
1√2
1√20
1√2
− 1√20
.R.R.Pela Corpos Rıgidos

Corpos RıgidosMovimento Plano do Corpo RıgidoMomento Angular
Solucao
Os eixos principais de inercia aparecem na Figura.
R.R.Pela Corpos Rıgidos





























