Embed Size (px)
Citation preview

1
Motion estimation with tagged ultrasound images
*H. Liebgott – Adeline Bernard – Sébastien Salles

2
Introduction of the platformscanners/ probes / phantoms
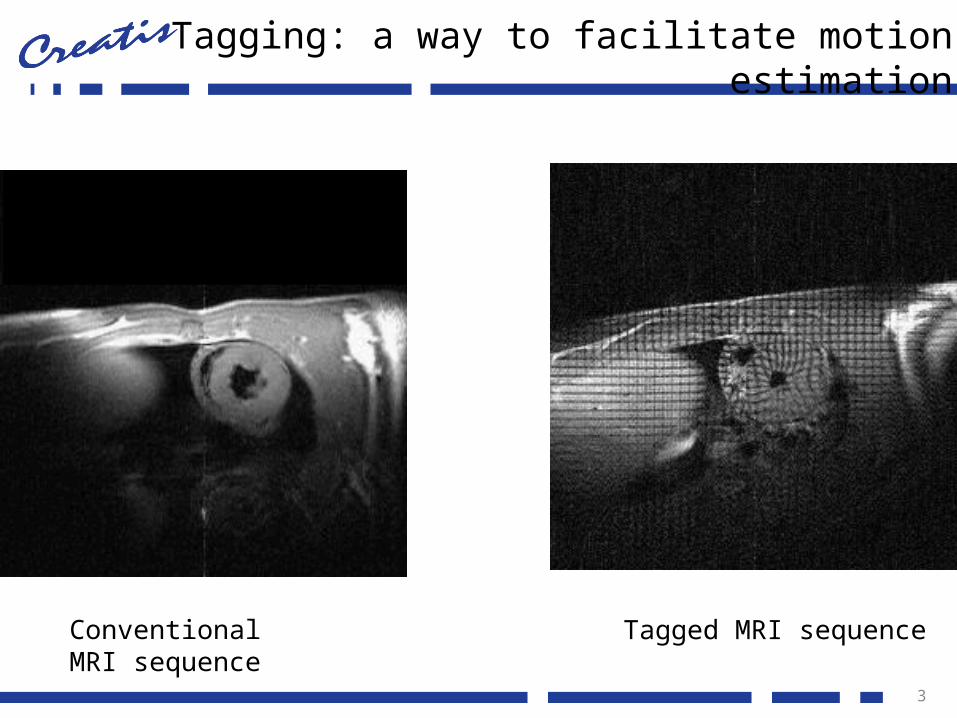
Tagging: a way to facilitate motion estimation
3
Conventional MRI sequence
Tagged MRI sequence

US Tagging or Transverse oscillations
4
-1 -0.5 0 0.5 1Amplitude
-1 -0.5 0 0.5 1Lateral position [mm]
Dep
th [
mm
] 49.5
50
50.5
-1-1
-0.5
0
0.5
1
Am
plitu
de
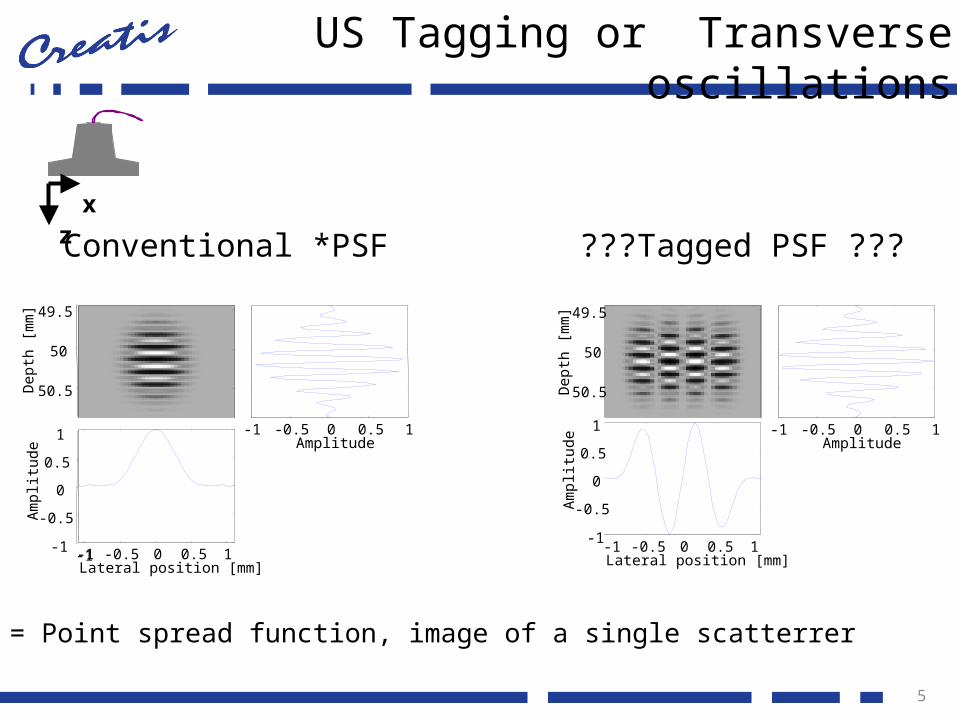
Conventional *PSF
*PSF = Point spread function, image of a single scatterrer
xz
Axial motion estimation OK
Transvers motion estimation more difficult
US Tagging or Transverse oscillations
5
-1 -0.5 0 0.5 1Amplitude
-1 -0.5 0 0.5 1Lateral position [mm]
Dep
th [
mm
] 49.5
50
50.5
-1-1
-0.5
0
0.5
1
Am
plitu
de
Conventional *PSF
-1 -0.5 0 0.5 1Amplitude
-1 -0.5 0 0.5 1Lateral position [mm]
Dep
th [
mm
] 49.5
50
50.5
-1
-0.5
0
0.5
1
Am
plitu
de
???Tagged PSF ???
*PSF = Point spread function, image of a single scatterrer
xz
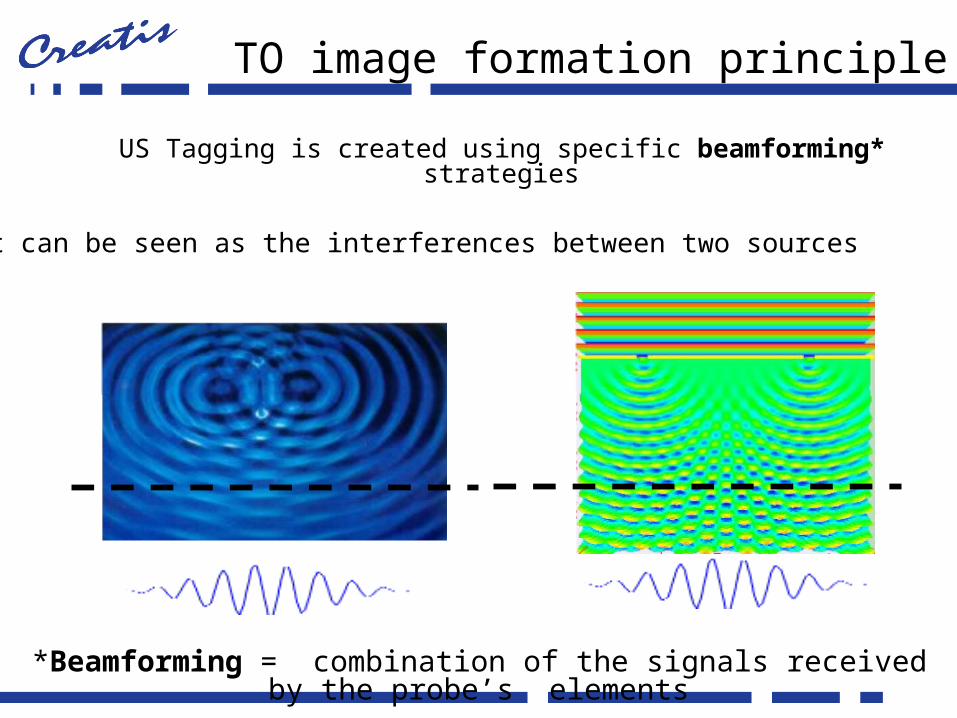
US Tagging is created using specific beamforming* strategies
TO image formation principle
*Beamforming = combination of the signals received by the probe’s elements
It can be seen as the interferences between two sources

7
US-Tagging images on the Ula-Op– Images– Transverse motion estimation on a phantom– 2D motion estimation of the carotid artery

US-Tagging and cardiac imaging
8
FFT 2D
Conventionnelle US-Tagging
Simulations

Motion fields
9

in vivo
10
Conventionnel US-Tagging

in vivo
11

Conclusion
– « US tagging »• Facilitate 2D motion estimation• Realistic simulations• faisabilité in vitro and in vivo
– Perspectives• Validate quantitatively the in vivo part• Ultrafast US Tagging• 3D US Tagging
12

13
Thanks, Questions?





























