Embed Size (px)
Citation preview

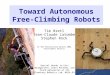
Motion Planning of Multi-Limbed Robots Subject to Equilibrium Constraints.
Timothy Bretl
Presented by Patrick Mihelich and Salik Syed

Introduction● Free-Climbing robots must coordinate limb motions to satisfy a set of complex constraints.
●Decision made early on affect ability to complete task.
● Two primary constraints Contact (keep hands at a carefully chosen set of hands)
Equilibrium (Apply forces exactly to compensate for gravity without slip)

Basic Approach
● First plan for which set of holds to use
●Search if a path exists between this set of holds.●Use sampling based techniques to compute both holds, and connectivity between holds.

Configuration Space of a 4 Limb climbing robot.
●Workspace is a plane●Configuration space is parametrized by (x,y), angle of body and 2 angles per arm. (in empty space)
(x,y,Θ)
Configuration in empty space:q=(x,y,Θ,β1.1,β1.2....β4.1,β4.2)

Better characterizing the C-Space● A climbing robot must maintain contact with at least some
number of holds
● Because certain limbs are constrained when holding a given hold. The configurations of those limbs can be parametrized. The configuration of the robot under constraint is thus a submanifold of the C-Space. This is a “Stance Manifold”
●The feasible space is part of this lower dimension “stance manifold” which avoids collision or dis-equillibrium. (analagous to freespace)

3 or 4 Hold stances:Stance Manifold is a 5D manifold in 11D C-space.
Stance Manifold is a 3D manifold in 11D C-space.
Due to constraints body configuration can be defined by 3 parameter
Support seg. Support seg.
Inverse kinematics would yield a definite solution given 5 parameters + constrainsts

Transitions●Transitions are are configurations which belong to more than one state manifold. i.e they are configurations which could be used to transition from one state to another.

Representing connectivity of sub-manifolds
●Stance Graph: Simply represent connectivity of stance manifolds with graph. (relatively) Easy to compute (requires only finding intersecting configurations)
A B
C
D
E
Each node in the graph representsa seperate stance manifold.
If there is a overlap betweenA,B add an edge

Problem with stance graph●Path in stance graph is a necessary but not sufficient condition for changing stances..●Stance graph does not take into account obstacle collisions. Since a stance manifold represents all configurations. (not to be confused with feasible region)●Just because your two stances are connected does not mean you can use those stances to reach the goal w/o collision (animation)●It is difficult to compute the stance graphs explicitly ... (sampling based techniques are used)

1
3
4
2
1 23
4









Component Graphs
●Instead look at the connected components of the stance manifolds.●If two components A,B have the property A∩B ≠{}then add an edge between the components.●This provides both a necessary and sufficient condition.

S1
S2
S4
S3
Two different connected components
S1..S4 are stance manifolds.
Note dimensionality of manifolds may not be the same,intersections illustrate that both S1,S2contain the same configuration

Transition graph●Can also have “transition graph” two points q1 of A,B and q2 of B,C are connected if there exists a collision free path between q1,q2 inside B●Similar to component graph, but easier to compute (don't need to compute connected components)

S1
S2
S4
S3
S1..S4 are stance manifolds.
q1 q2
q1q2

Two-stage search strategy
● Explore stance graph● Edges are transitions between stances● Generated quickly● No guarantee of feasible path
● Explore transition graph● Edges are paths between transitions● Expensive, but can use sample-based techniques

Exploring the stance graph
● Maintains a priority queue of nodes to explore, ordered according to a heuristic.
● Computes candidate sequence of nodes, edges
A B
C
D
E

Exploring the transition graph● Explores transition for each edge in candidate
sequence● Explores path for each node● Find furthest reachable stance
● If not the final stance, delete edge and re-search stance graph
A B
C
D
E

Exploring the transition graph● Explores transition for each edge in candidate
sequence● Explores path for each node● Find furthest reachable stance
● If not the final stance, delete edge and re-search stance graph
A B
C
D
E

Justification
● Stance graph cheaper than transition graph● Finding transition cheaper than finding path to reach
it
● Stance graph is good approximation of transition graph
● Can prune large portions of transition graph

Ordering the search
● “Lazy strategy”● Order priority queue by likeliness that candidate
sequence will actually be feasible● Estimate probability that each edge in stance
graph will be path-connected● Time spent exploring● Learned classifier

Finding transitions
● Transition lies in intersection of feasibility spaces at adjacent stances
● Sample configurations from this intersection
S2
S3

Finding paths
● Path lies in stance manifold between transitions● Use PRM approach
● Retain samples where robot is at equilibrium
S4
q1q2

Non-uniform sampling strategy
● C-space can be decomposed into subsets by elbow bends
● Configurations with different elbow bends may not be connected by straight line
● Need to explicity sample singular configurations

Conclusions
● “Stance before motion” approach is effective
● Satisfaction of complex conditions well approximated by simple ones
● Non-uniform PRM sampling strategy● Explicitly sample singular configurations

Future work
● Dynamics
● Autonomous hold detection
● Identifying “crux” steps