Embed Size (px)
DESCRIPTION
proyecto sobre motores
Citation preview

Adelaida Arellano Flores
21/05/2015
Motores Síncronos y Asíncronos
TECNOLÓGICO NACIONAL DE MÉXICO INSTITUTO TECNOLÓGICO DE PUEBLA
Electrónica y Electricidad Industrial
José Ramírez Espinoza

MOTORES SÍNCRONOS Y ASÍNCRONOS
1. Motor síncrono
Los motores síncronos son máquinas sincrónicas que se usan para convertir potencia eléctrica en potencia mecánica.
El motor sincrónico obtiene su nombre de la expresión velocidad síncrona, con la cual se ha descrito la velocidad natural del campo magnético rotatorio del estator. En el motor sincrónico se produce un campo magnético rotatorio y se usa de manera que reaccione con un campo especialmente originado en el rotor. De hecho, en el efecto de motor que resulta, el rotor se fija sincrónicamente con el campo rotatorio del estator y es arrastrado a la velocidad sincrónica del campo magnético rotatorio. Según se ha explicado en el estudio del campo magnético rotatorio, la velocidad de rotación está controlada estrictamente por la frecuencia de la potencia de c-a aplicada y el número de polos principales. Como la frecuencia de la potencia la regulan las compañías proveedoras de energía eléctrica, los motores síncronos tienden a mantener su velocidad con un alto grado de precisión. Por esta razón, los motores síncronos tienen aplicaciones importantes en relojes eléctricos y otros dispositivos de control de tiempo.
En la figura que se muestra aparece un motor síncrono básico del tipo que pude encontrarse en un reloj eléctrico. Según se notara, el estator incluye polos de sombra para tener la seguridad de que se origine un campo magnético rotatorio. El rotor ilustrado es un trozo de hierro dulce en el cual el campo rotatorio del estator induce magnéticamente polos de polaridad opuesta. Como resultado, se establece una fuerza de atracción magnética entre los polos correspondientes norte y sur del campo rotatorio y los polos inducidos en el rotor, respectivamente. Al girar el campo del estator, el rotor es ´´arrastrado´´ a esta velocidad sincrónica. Cuando se aplica una carga ligera en el rotor, como por ejemplo las manecillas de un reloj, el rotor pude des sincronizarse instantáneamente del campo rotatorio pero volverá a seguir la rotación del campo del rotor, conservando la misma velocidad mientras no haya cambio en la carga.
El rotor de hierro dulce se magnetiza por las líneas de flujo del campo
En el motor síncrono básico, el rotor está fijo en posición por la fuerza atractiva del campo del estator y gira con la velocidad sincrónica correspondiente al campo magnético rotatorio del estator

En un motor simple como el de la figura, la magnitud real de los polos inducidos en el rotor es pequeña y solo tiene una débil interacción con el campo rotatorio del estator. Existen motores síncronos usados en relojes eléctricos y otros dispositivos de control de tiempo y que se ponen en marcha, por si mismos. Estos motores utilizan los llamados devanados amortiguadores en su rotor, con lo cual se produce un aumento efectivo en la inducción magnética entre el estator y el rotor, lo que hace aumentar la interacción estator-rotor en el punto donde se produce suficiente par para poner en marcha el motor.
1.1 Estructura
El estator de motor síncrono generalmente consta de la cubierta de acero soldado o hierro fundido que sostiene un anillo ranurado de acero dulce laminado. Las laminaciones se aíslan entre si y las ranuras en ellas se alinean mediante material de fibra córnea. Las bobinas del devenado del estator se alojan en las ranuras alineadas abiertas del anillo de acero. Todas las bobinas están aisladas individualmente y son semejantes e intercambiables. Con este tipo de estructura es fácil quitar e instalar nuevas bobinas cuando se necesitan algunas reparaciones. El estator incluye bloques espaciadores que construyen un ducto de aire radial de extremo abierto en la estructura a través del cual puede circular el aire de enfriamiento.
Los polos magnéticos en el estator so indistinguibles debido a que no se usan piezas polares, como en el rotor. Ténganse presente que las polaridades magnéticas del estator giran para producir un campo rotatorio. Los polos se producen en cualquier instante en las bobinas que conducen la corriente apropiada y, como las fases de corriente difieren en las bobinas, los polos se desplazan de una bobina a otra. Así pues, se dice que el estator tiene polos distribuidos.
La estructura del estator de un motor síncrono es similar a la del estator del alternador. El estator tiene devenados distribuidos, de manera que sus polos son indistinguibles.

1.2 Principios básicos de funcionamiento
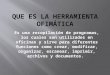
Para entender el concepto básico de un motor sincrónico, véase la figura 1 que muestra un motor sincrónico de dos polos. La corriente de campo IF del motor produce un campo magnético BRde estado estable. El principio básico del funcionamiento de un motor sincrónico es que el rotor de la maquina ´´cace´´ al campo magnético giratorio del estator alrededor de un circulo, sin que lo llegue a alcanzar.
1.3 Circuito equivalente de un motor sincrónico
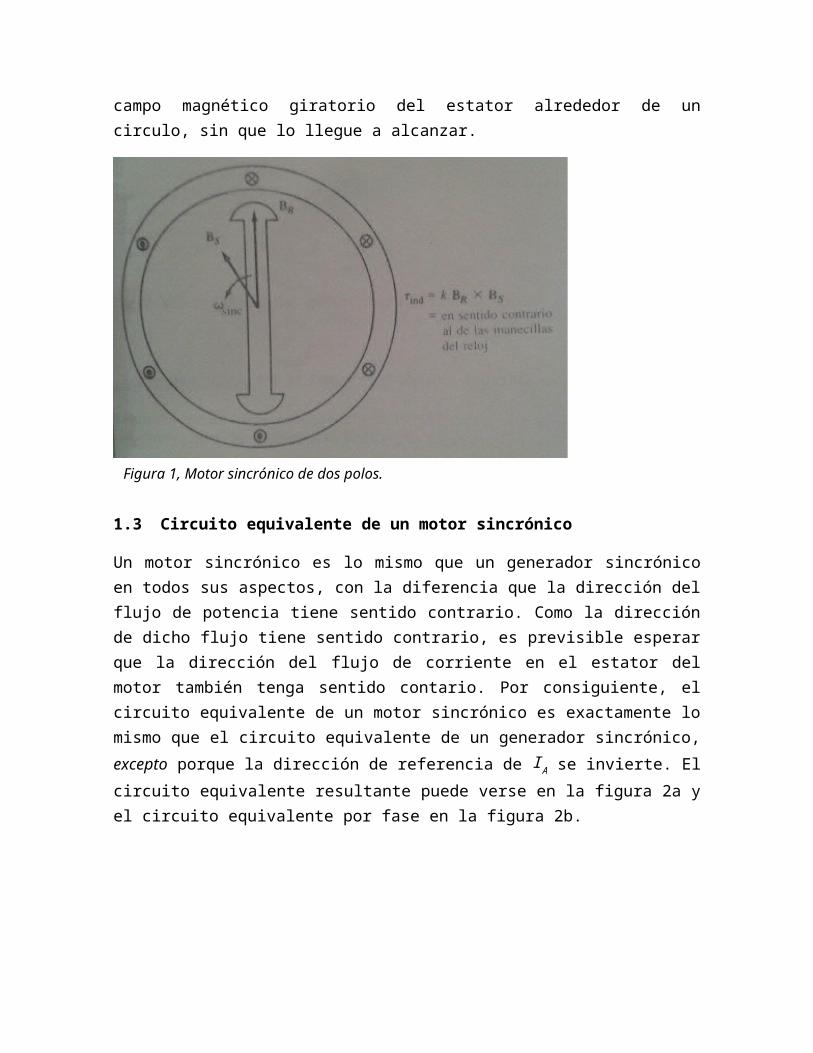
Un motor sincrónico es lo mismo que un generador sincrónico en todos sus aspectos, con la diferencia que la dirección del flujo de potencia tiene sentido contrario. Como la dirección de dicho flujo tiene sentido contrario, es previsible esperar que la dirección del flujo de corriente en el estator del motor también tenga sentido contario. Por consiguiente, el circuito equivalente de un motor sincrónico es exactamente lo mismo que el circuito equivalente de un generador sincrónico, excepto porque la dirección de referencia de I A se invierte. El circuito equivalente resultante puede verse en la figura 2a y el circuito equivalente por fase en la figura 2b.
Figura 1, Motor sincrónico de dos polos.
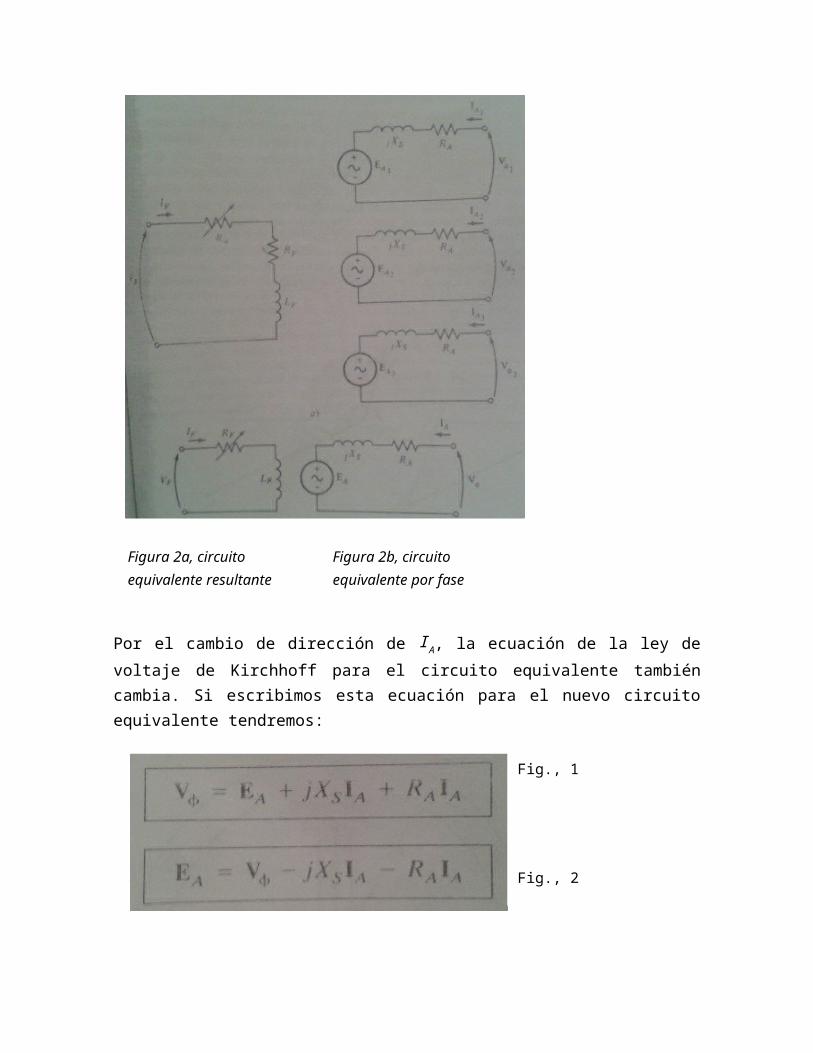
Por el cambio de dirección de I A, la ecuación de la ley de voltaje de Kirchhoff para el circuito equivalente también cambia. Si escribimos esta ecuación para el nuevo circuito equivalente tendremos:
Esta es exactamente la misma ecuación del generador, con la diferencia que el signo del término de la corriente se ha invertido.
Fig., 1
Fig., 2
Figura 2a, circuito equivalente resultante
Figura 2b, circuito equivalente por fase
1.4 El motor sincrónico desde la perspectiva del campo magnético
Para comenzar a entender el funcionamiento de un motor sincrónico, echemos nuevamente un vistazo al generador sincrónico conectado aun barraje infinito. El generador tiene un motor primario conectado a su eje, haciéndolo girar. La dirección del momento de torsión aplicado T ap por el motor primario es en el sentido del movimiento, porque el motor primario hace que el generador gire en primer lugar.
El diagrama fasorial del generador, trabajando con una corriente de campo grande, se ilustra en la figura 3a y el diagrama de campo magnético correspondiente, en la figura 3b. Tal como se describió antes, BR corresponde a (produce) EA, Bneto corresponde a (produce) V ∅ y Bs corresponde a E stat (= -jX S I A). La rotación, tanto del diagrama fasorial como del diagrama del campo magnético, es contraria a la de las manecillas del reloj (lerógira), en la figura, según convención matemática normalizada del ángulo creciente. El momento de torsión inducido en el generador se puede hallar a partir del diagrama de campo magnético, el momento magnético se expresa por:
1.5 Funcionamiento del motor sincrónico en condición estable
Esta sección indaga por el comportamiento de los motores sincrónicos bajo condiciones de carga y de corriente de campo, así como por el problema de la corrección del factor de potencia en los motores sincrónicos.
Fig. 3a, Diagrama fasorial de un generador sincrónico que funciona con un factor de potencia en atraso.
Fig. 3b, Diagrama del campo magnético correspondiente.

1.6. Curva característica de la velocidad-momento de torsión del motor sincrónico
Los motores sincrónicos suministran potencia a cargas que son básicamente aparatos de velocidad constantes. Generalmente se conectan a sistemas de potencia mucho más grandes que los motores individuales, así que los sistemas de potencia se asemejan a los barrajes infinitos de los motores. Esto significa que la tensión de los bornes y la frecuencia del sistema serán constantes independientemente de la carga. La curva característica de la velocidad-momento de torsión resultante puede verse en la figura 4. La velocidad de condición estable del motor permanece desde vacío hasta llegar al máximo momento de torsión que el motor puede suministrar. La ecuación del momento de torsión es
El momento de torsión máximo o momento de desenganche tiene lugar cuando δ=90 °.
Cuando el momento de torsión aplicado sobre el eje de un motor sincrónico excede el momento de desenganche, el rotor no puede permanecer ligado por más tiempo al estator y a sus campos magnéticos netos. En lugar de eso, el rotor comienza a deslizarse
Fig. 4, Curva característica velocidad-momento de torsión de un motor sincrónico. Como la velocidad del motor es constante, su regulación de velocidad es cero.

por detrás de ellos. Mientras el rotor se frena, el campo magnético del estator lo ´´traslada´´ repetidamente y la dirección del momento inducido en el rotor se invierte con cada pasada. El enorme momento de torsión resultante que surge, primero en un sentido y luego en el otro, produce en todo el motor una vibración de gran magnitud. La pérdida de sincronización después que el momento de desenganche se supera, se conoce como polos deslizantes.
El momento máximo o momento de desenganche, se expresa
Estas ecuaciones indican que cuanto más grande sea la corriente de campo (y en consecuencia EA), mayor es el momento máximo del motor. Hay, por tanto, una estabilidad mayor para trabajar el motor con una corriente de campo grande o una EAgrande.
1.7 Arranque de los motores sincrónicos
En la sección 1.4 se explicó el comportamiento de un motor sincrónico en condiciones de estado estable. Para entender la naturaleza del problema del arranque, véase la figura 5. Esta figura muestra un motor sincrónico de 60-Hz en el momento en que se le aplica la potencia al embobinado del estator. El rotor del motor es estacionario y por lo tanto el campo magnético BR es estacionario. El campo magnético BS comienza a pasar rápidamente alrededor del motor a velocidad de sincronismo.

~ La figura 15a muestra la maquina a las t=0s, cuando BR y BS estan exactamente alineados.
~ La figura 15b muestra la situación a las t=1/240 S. En tan corto tiempo, el rotor escasamnete se ha movido, pero el campo magnetico del estator ahora señala hacia la izquierda.
~ La figura 15c muestra la situación a las t=2/240 S. En este punto BR y BS señalan en dirección contraria y T ind=0 nuevamente. A t=3/240 S, el campo magnetico del estator apunta ahora a la dercha.
Por ultimo, alas t=4/240 S, el campo magnetico del estator esta nuevamnete alineado con el campo magnético del rotor y T ind=0. Lo que le sucede al motor es que vibra fuertemente con cada ciclo eléctrico y finalmente se recalienta.
Métodos basicos que se usan para arrancar un motor sincronico en forma segura:
o Reducir la velocidad del campo magnético del estator hasta un valor suficientemente bajo como para que el rotor se pueda acelerar y enganchar
Figura 5, Problemas durante el arranque de un motor sincrónico; el momento de torsión alterna rápidamente tanto en magnitud como en dirección, ocasionando que el momento de torsión neto sea cero.

con él durante medio ciclo de rotacion del campo magnético. Esto se puede hacer reduciendo la frecuencia de la potencia eléctrica.
o Usar un motor primario externo para acelerar el motor sincrónico hasta la velocidad de sinccronismo, seguir el procedimiento para ponerlo en paralelo y poner la máquina en linea como un generador. Luego, al apagar o desconectar el motor primaro harán de la máquina sincrónica, un motor.
o Usar embobinados amortiguadores.
1.8 Valores nominales de los motores síncronos
Como los motores sincrónicos son fisicamente las mismas máquinas que los generadores sincrónicos, los valores nominales básicos de ambos, motores y generadores, son los mismos. La única diferencia importante es que una EA da un factor de potencia en adelantado en lugar de uno ed atrasado y por lo tanto el efecto del limite de la corriente de campo máxima, se expresa como un valor nominal a un factor de potencia en adelantado. También, como la salida de un motor sincrónico es potencia mecánica, la potencia nominal de un motor sincrónico se da genelmente en caballo de fuerza en lugar de kilovatios.
En la figura 6 se ve la plaqueta de identificacion de un motor sicróncronico grande. Además de la información que se ve en la figura, un motor sincrónico más pequeño tendria el factor de servicio indicado en la suya. En general, los motores sincrónicos son más adaptables a las aplicaciones de baja velocidad y alta potencia que los motores de inducción. Por tanto, se usan comúnmente para cargas con esas características.
Figura 6. Placa de identificación típica de un motor sincrónico grande. (General Electric Company).

2. Motor asíncrono
Los motores asincrónicos o de inducción son un tipo de motor de corriente alterna en el que la corriente eléctrica del rotor necesita para producir torsión es inducida por inducción electromagnética del campo magnético de la bobina del estator.
2.1 Funcionamiento del motor asíncrono
El Campo magnético giratorio se obtiene con tres devanados desfasados 120º (acoplados en estrella o triángulo) y conectados a un sistema trifásico de ca.
Si por el arrollamiento polifásico del estator del motor de una maquina circula una corriente de pulsación ω y asi p pares de polos, se origina un campo magnético de p pares de polos y que giran a la velocidad de ω/p. si el campo tiene distribución senoidal:
Imagen animada. El punto rojo es una marca de referencia para ver que Nr <Ns . Recarga la página si no se mueve)

El campo magnético giratorio origina un flujo que induce corrientes en el rotor que interactúan con el campo magnético del estator. En cada conductor del rotor se produce una fuerza de valor F=i L B que da lugar al par motor.
2.1.1 Principio de funcionamiento del motor asíncrono
El estator está constituido por un núcleo en cuyo interior existen 3 partes de arrollamientos o devanados colocados simétricamente en un ángulo de 120°. Las bobinas del estator inducen corriente alterna en el circuito eléctrico del rotor. La interacción entre el campo magnético del estator y la corriente del inducido en el roto produce la fuerza que hace mover el rotor.
A, B Y C, representan las tres bobinas inductoras, la circulación del sistema trifásico de corrientes, produce un campo magnético giratorio.

El sistema de tres bobinas produce un par de polos, se puede construir el estator con un número de bobinas siempre múltiplo de 3 produciendo un número de pares de polos mayor.
La velocidad angular en radianes/seg, a la que gira el campo magnético producido por el estator viene dada por la siguiente expresión hhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhhh
ωs=f .2 . πp
Siendo f, la frecuencia de la red y p el número de pares de polos. La velocidad en r.p.m.
vendrá dada por la expresión NS=f .60p
Esta será la velocidad de sincronismo, el rotor nunca puede girar a esta velocidad, porque en ese caso la interacción de campo magnético de rotor y estator no produce fuerza.
Representación de campos magnéticos producidos en rotor y estator.

2.2 Constitución del motor asíncrono
El estator esta conformado por chapas de un acero especial con buena conduccion magnetica, aisladas electricamente para evitar peridas por corrientes de Foucoult. Las chapas tienen unas ranuras donde se alojan los desvanados de excitación.
En el interior del estator va colocado el rotor, que es un cilindro de chapa magnética fijado al eje. En su periferia van dispuestas unas ranuras en las que se coloca el bobinado correspondiente.
El entrehierro de estos motores es constante en toda su circunferencia y su valor debe ser el mínimo posible.
2.3 Motores de ´´jaula de ardilla´´
El rotor consta de n cierto número de baras de cobre o de aluminio, conectadas elesctricamnet por anillo de aluminio finales. Su construccion es mas económica, robusta y sencilla, no incorporan escobillas por lo que su mantenimiento es menor, pero no permite conectar el rotor a otros componentes electricos fuera del mismo.

2.4 Cambio del sentido de giro
Se ha visto anteriormente que el giro del rotor se debe al campo magnetico que produce el estator, para cambiar el sentido de giro del eje sera necesario cambiar el sentido de giro de dicho campo.
Esto se consigue invirtiendo entre si dos fases cualesquiera, permaneciendo una de ellas con la misma conexción.
2.5 Arranque del motor
En el arranque del motor de produce un valor elevado de correiente, lo cual da lugar a problemas en las lineas electricas por lo que es necesario limitar este valor de corrriente, existen varios sistemas:
~ El arranque de directo del motor sólo es válido para motores de poca potencia.
~ Arranque mediante resistencias, consiste en conectar en serie con el motor unas resistenacias, es un método que desperdicia la potencia en forma de calor, por lo que es muy poco utilizado.
~ Arranque mediante un auotrasformador, mediante un trasformador podemos reducir el valor de voltaje.
Esquema de arranque por autotransformador

3. Síntesis Motor Síncrono y Asíncrono
Si hacemos girar un imán de U a la velocidad nz alrededor de una aguja enmantada, esta girará a una velocidad n1= nz Motor Síncrono
Si hacemos girar un imán de U a la velocidad nz alrededor de una masa circular metálica, esta girará a una velocidad n2 < nz Motor Asíncrono

4. Conclusiones
5. Fuentes de información
Liwschitz-Garik "MAQUINAS DE CORRIENTE ALTERNA", compañía editorial continental S.A 1974.
Archivo pdf "maquinas síncronas" . Eugenio Téllez Ramírez, AP&C
Electricidad, serie1-7. Mileaf
Electricidad, Harry Mileaf pág., 517-544
Máquinas electrónicas, segunda edición- Chapman, Stephen J. pág., 16-23
Eléctricas, Tomo2- A. V. Ivanov-Smolenski pág., 109-111