Embed Size (px)
Citation preview

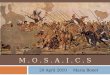
M34/Navcam Context Mosaic from Sol 1296
Digital Elevation Model (DEM) corresponding to the above
MSAM: Mastcam Stereo Analysis and MosaicsRobert Deen1, Hallie Abarca1, Stirling Algermissen1, Justin Maki1, Nicholas Ruoff1
Amy Culver1, Steve Levoe1, Adrian Tinio1, Nicholas Toole1, Oleg Pariser1, Ray Arvidson2, Ken Herkenhoff3
1Jet Propulsion Laboratory, California Institute of Technology2Washington University in Saint Louis 3USGS Flagstaff
National Aeronautics and Space Administration
Jet Propulsion Laboratory
California Institute of Technology
Pasadena, California
National Aeronautics and Space Administration
What is MSAM?• Comprehensive, systematic processing of MSL Mastcam data
from beginning of mission to PDS Release 17 (Sol 1869) or 18
(Sol 2003).
• Stereo analysis products
• Terrain meshes
• Mosaics
• Data released to public via PDS4 (Planetary Data System)1
• Expect > 25 TB of data to be produced
• Funded by PDART, part of the NASA ROSES program
Stereo products• All Mastcam stereo pairs (simultaneous M34 and M100 exposures) will be
processed in stereo using the JPL MIPL (Multimission Image Processing Lab)
pipeline
• Difference in focal length is handled via 2-D correlation2 and has been proven
in MIPL/OPGS (Operational Products Generation Subsystem) operations
• Products are similar to OPGS Navcam products3
• Decompanded (8->12 bit expansion)
• De-Bayered (color reconstruction)
• Radiometric correction (non-rigorous; for rigorous see Bell4 this
conference)
• Stereo disparity
• XYZ point clouds
• Surface normal
• Range maps
• Slope maps (degrees of slope from vertical)
• Slope heading (azimuth of slope)
• Range error estimate
• “Colorglyphs” (red/blue anaglyphs that provide an impression of color
by using red from left eye and green/blue from right)
• Epipolar-aligned color products for use with stereo displays
Terrain meshes• A terrain mesh is a convenient way to visualize data in 3D
• Consist of triangles in 3-D space, with image data attached as textures
• Created for each stereo pair in OBJ format
• Suitable for mesh viewing programs such as MeshLab5
• OBJ files are compliant with PDS4
• MeshLab project files also supplied that group meshes from a sequence into
a single entity for ease of viewing (these files are supplied as a convenience
and may not be PDS4 compatible)
General Mosaic Features• Made from filter 0 (broadband RGB color) only
• Mosaics use rigorous radiometric correction results from Bell4
• Certain frames are excluded:
• Thumbnails
• Images that target hardware (pointed in a rover hardware frame)
• Calibration target images
• Images centered above +20° elevation (Navcams above +45°)• Partial images
• Images re-sent with a better (less lossy) compression
• Grouped by site/drive (except stereo mosaics)
• One of each type of mosaic at every rover location
• At drill or scoop sites, additional post-modification mosaics are made
• General mosaic process described in Alexander3 and Deen6
Cylindrical M34/Navcam Context Mosaics• M34 images over Left Navcam background
• Navcam helps establish context for Mastcam observations
• Created at M34 resolution (Navcam is upsampled)
• Pointing-corrected7 to reduce seams and parallax errors
• Full 360° azimuth coverage
• If Navcam panorama is partial, coverage is union of Mast & Nav
• Vertical extent is union of Mastcam & Navcam, to a maximum of +20°
Cylindrical M100/Navcam Context Mosaics• Similar to M34/Navcam mosaics except as noted below
• M100 resolution and Right Navcam background
• Trimmed in azimuth: Mastcam extent is expanded 45°, then largest gap
is trimmed out if it exceeds 60°• Effectively, only gaps > 150° in azimuth are trimmed, and there is
always a 45° margin (assuming Navcam coverage)
• “Crater rim extinction” survey frames, often taken at azimuth=0°, elevation=1.5°, are not considered during extent calculation, but are
included in the mosaic if they are within the extent anyway.
Cylindrical Mastcam-only Mosaics• Similar to the above but without the Navcam background
• Trimmed to Mastcam extent (only largest azimuth gap is removed)
• Frames w/o neighbors within 30° (M34) or 10° (M100) eliminated
• Little to be gained with no neighbors or context
Stereo Mosaics• Epipolar-aligned mosaics at M34 resolution
• Cylindrical-perspective projection3,6
• Grouped by sequence ID rather than site/drive
• May be multiple mosaics per rover location
• Single-image sequences not mosaicked (view using single-image
products)
• Produce both “colorglyph” and separate left/right color images
Orthorectified Mosaics and DEMs• Digital Elevation Models (DEMs) and coregistered orthorectified image
• 1mm resolution at 10m range (only if stereo data <10m from rover)
• 1cm resolution at 75m range (only if stereo data >10m from rover)
Finder Mosaics• Small mosaics showing what Mastcam frames are available
• 25% of Navcam resolution, untrimmed
• Each Mastcam frame is outlined & numbered so frame can be identified
• Helps navigate the extremely large data set and find frames of interest
• Separate finders for M34, M100, and stereo coverage
Data Format• All products will be PDS4 compliant
• Image and mosaic products conform to syntax and semantics of PDS3
• Existing tools should be able to read them
Peer Review and Feedback• This data set is being generated and made public in order to
support future scientific investigations. We welcome comments
and suggestions from all potential users
• PDS Peer Review of these products will begin shortly. If you are
interested in reviewing, please contact the MSAM PI
• Release is expected in early 2019
Acknowledgements• This research is being performed at the Jet Propulsion Laboratory,
California Institute of Technology, under a contract with NASA
• We would particularly like to thank the Planetary Data Archiving,
Restoration, and Tools (PDART) program and Dr. Sarah Noble for
funding this work
References1 https://pds.nasa.gov2 Deen, R.G. & Lorre, J.J (2005), IEEE SMC 911-9163 Alexander, D. & Deen, R. (2013), MSL SIS, PDS ID MSL-M-NAVCAM-2-EDR-V1.04 Bell, J.F. III et al (2018), LPSC #10685 http://meshlab.sourceforge.net6 Deen, R.G. (2012), 1st Planetary Data Workshop, p. 487 Deen, R.G. et al (2017), 3rd Planetary Data Workshop, #7083
Orthorectified Mastcam mosaic. Sol 19, 75m range
a b
c d
e f
g h
Single-frame stereo products. a=decompanded; b=radiometric;
c=disparity; d=XYZ (10cm contours); e=range (10cm contours); f=surface
normal; g=slope (0-15°); h=slope heading. These are visualizations;
actual products are numeric
“Colorglyph” mosaic from sol 1448, sequence ID MCAM07173
© 2018. All rights reserved.
LPSC 2018
Abstract #2332
Finder mosaic showing location of M34 observations on Sol 488. Numbers correspond to a list file containing filenames