Embed Size (px)
Citation preview

MSBVH: An Efficient Acceleration DataStructure for Ray Traced Motion Blur
Leonhard Grunschloß Martin StichSehera Nawaz Alexander Keller
August 6, 2011

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

Principles of Accelerated Ray Tracing
Hierarchical culling
I object list partitioning ⇒ BVH
I bounded memory, but overlapping bounding volumes
I spatial partitioning ⇒ kd-tree
I nodes do not overlap, but reference duplication

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

SBVH
Best of both worlds
I object list partitioning whenever overlap is small
I spatial partitioning otherwise
I use spatial splits to build BVH with reference duplication
How to support motion blur?

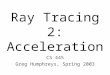
Multiple BVHs Sharing Identical Topology
Convex combination of bounding boxes yields conservative BVH

Multiple BVHs Sharing Identical Topology
Convex combination of bounding boxes yields conservative BVH

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0.5
I acceptable memory overhead
I allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0.5
I acceptable memory overheadI allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0
t=1
t=0.5
I acceptable memory overheadI allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0
t=1
t=0.5
I acceptable memory overheadI allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0
t=1
t=0.5
I acceptable memory overheadI allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0.5
I acceptable memory overhead
I allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0.5
I acceptable memory overhead
I allows for very tight bounding boxes for every ray time t

Multiple BVHs Sharing Identical Topology
Example: linear interpolation at leaf level
t=0.5
I acceptable memory overhead
I allows for very tight bounding boxes for every ray time t

Interpolation and Spatial Splits
Can a kd-tree be interpolated?
I objects can move across split planesI thus node references change!
I hierarchy over convex hulls is inefficient
I splitting along time-axis requires lots of memory

Interpolation and Spatial Splits
Can a kd-tree be interpolated?
I objects can move across split planesI thus node references change!
I hierarchy over convex hulls is inefficient
I splitting along time-axis requires lots of memory

Interpolation and Spatial Splits
Can a kd-tree be interpolated?
I objects can move across split planesI thus node references change!
I hierarchy over convex hulls is inefficient
I splitting along time-axis requires lots of memory

Interpolation and Spatial Splits
Can a kd-tree be interpolated?
I objects can move across split planesI thus node references change!
I hierarchy over convex hulls is inefficient
I splitting along time-axis requires lots of memory

Our Contribution
Extend the SBVH to handle motion blur (MSBVH)
I by computing multiple bounding volumes per node
I using classic bounding volume interpolation traversal
I which includes spatial splits
I memory-efficient (MSBVH)
I reduced bounding volume overlap (MSBVH)
Note: we assume the hierarchy is rebuilt per frame

Our Contribution
Extend the SBVH to handle motion blur (MSBVH)
I by computing multiple bounding volumes per node
I using classic bounding volume interpolation traversalI which includes spatial splits
I memory-efficient (MSBVH)
I reduced bounding volume overlap (MSBVH)
Note: we assume the hierarchy is rebuilt per frame

Our Contribution
Extend the SBVH to handle motion blur (MSBVH)
I by computing multiple bounding volumes per node
I using classic bounding volume interpolation traversalI which includes spatial splits
I memory-efficient (MSBVH)
I reduced bounding volume overlap (MSBVH)
Note: we assume the hierarchy is rebuilt per frame

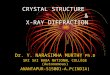
Algorithm
t=0 t=1
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1t=0.5
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1t=0.5
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1t=0.5
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1t=0.5
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1t=0.5
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

Algorithm
t=0 t=1
1. Build the SBVH for t = 0.5 to determine topology
2. Compute partial primitives in leaf nodes
3. Compute corresponding bounds for t = 0 and t = 1
4. Propagate bounds to the parent nodes
5. Interpolate these bounds during traversal

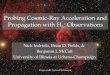
Triangles and AABB-Hierarchies under Linear Motion
t=0 t=1t=0.5
1. Use Sutherland-Hodgman to clip against leaf AABB
2. Results in barycentric coordinates of polygon vertices
3. Compute transformed polygon for t = 0 and t = 1
4. Bound the transformed polygon
5. No extra storage necessary

Triangles and AABB-Hierarchies under Linear Motion
t=0 t=1t=0.5
1. Use Sutherland-Hodgman to clip against leaf AABB
2. Results in barycentric coordinates of polygon vertices
3. Compute transformed polygon for t = 0 and t = 1
4. Bound the transformed polygon
5. No extra storage necessary

Triangles and AABB-Hierarchies under Linear Motion
t=0 t=1t=0.5
1. Use Sutherland-Hodgman to clip against leaf AABB
2. Results in barycentric coordinates of polygon vertices
3. Compute transformed polygon for t = 0 and t = 1
4. Bound the transformed polygon
5. No extra storage necessary

Triangles and AABB-Hierarchies under Linear Motion
t=0 t=1t=0.5
1. Use Sutherland-Hodgman to clip against leaf AABB
2. Results in barycentric coordinates of polygon vertices
3. Compute transformed polygon for t = 0 and t = 1
4. Bound the transformed polygon
5. No extra storage necessary

Clipping Displaced Subdivision Surfaces
1. Subdivide along surface parametrization
2. Bound individual elements, e.g. using interval arithmetic
3. Clip resulting bounding boxes
4. The union conservatively bounds the clipped primitive

Clipping Displaced Subdivision Surfaces
1. Subdivide along surface parametrization
2. Bound individual elements, e.g. using interval arithmetic
3. Clip resulting bounding boxes
4. The union conservatively bounds the clipped primitive

Clipping Displaced Subdivision Surfaces
1. Subdivide along surface parametrization
2. Bound individual elements, e.g. using interval arithmetic
3. Clip resulting bounding boxes
4. The union conservatively bounds the clipped primitive

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segments
I restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
A(t)
I multiple motion segments
I restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

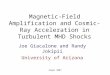
Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
A(0)
A(1/3)
A(1)
A(2/3)
I multiple motion segments
I restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segments
I restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segmentsI restricted to powers of two for propagation up the hierarchy
2 4 2 8
4 88
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segmentsI restricted to powers of two for propagation up the hierarchy
3 5 2 7
15 14210
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segmentsI restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

Extensions
I two-level hierarchy: animated instances
I interpolate transformation matrix elements to force linearmotion
I multiple motion segmentsI restricted to powers of two for propagation up the hierarchy
I higher-order interpolation
I refitting over multiple frames

Results
BVH traversal with linear interpolation
I reduced SAH cost
I significantly less intersection tests
⇒ Video
I often less traversal steps
I about 20% rendering speed-up for many scenes

Results
BVH traversal with linear interpolation
I reduced SAH cost
I significantly less intersection tests
I often less traversal steps
I about 20% rendering speed-up for many scenes

Summary
In practice, works well for single frames
I helps well whenever SBVH helps
I increased build times (between BVH and kd-tree)
I prototype implemention in OptiX
I spatial splits only avoid overlap for t = 0.5I topology determined for t = 0.5
I problematic for incoherent motion

Summary
In practice, works well for single frames
I helps well whenever SBVH helps
I increased build times (between BVH and kd-tree)
I prototype implemention in OptiX
I spatial splits only avoid overlap for t = 0.5I topology determined for t = 0.5
I problematic for incoherent motion