Embed Size (px)
Citation preview
M.Sc. Mechatronics(PO 2014)Simulation and Control of Mechatronic SystemsDate: 01.09.2021
Study Area Mechatronic Systems

Module manual: M.Sc. Mechatronics (PO 2014)Simulation and Control of Mechatronic Systems
Date: 01.09.2021
Study Area Mechatronic SystemsEmail: [email protected]
I

Contents
1 Fundamentals 11.1 Micro-technical Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Dynamic Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
System Dynamics and Automatic Control Systems III . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.3 More Fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Tools and Methods in Product Development . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Real Time Applications and Communication with Microcontrollers and programmable Logic Devices 5System Dynamics and Automatic Control Systems II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7Digital Control Systems I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Modeling and Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2 Optionals in Technical and Natural Science 102.1 Basics MPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Advanced Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.2 Basics ETiT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Digital Control Systems II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Controller Design for Multivariable Systems in State Space . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3 ADP / Seminars, Labs, CS-ES-NS 143.1 ADP / Seminars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 ADP / Seminars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143.1.1.1 ADP / Seminars MPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14ADP (6 CP) Dynamics and Vibrations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14ADP (6 CP) Automotive Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15ADP (6 CP) Flight Systems and Automatic Control . . . . . . . . . . . . . . . . . . . . . . . . . . . 16ADP (6 CP) Fluid Systems Technologies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17ADP (6 CP) Mechatronic Systems in Mechanical Engineering . . . . . . . . . . . . . . . . . . . . 18ADP (6 CP) Product Development and Machine Elements . . . . . . . . . . . . . . . . . . . . . . . 19ADP (6 CP) Applied Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20ADP (6 CP) System Reliability, Adaptive Structures and Machine Acoustics . . . . . . . . . . . . 21ADP (6 CP) Internal Combustion Engines and Powertrain Systems . . . . . . . . . . . . . . . . . 223.1.1.2 ADP / Seminars ETiT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23Project Seminar Robotics and Computational Intelligence . . . . . . . . . . . . . . . . . . . . . . . 23Project Seminar Automatic Control Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Project Course Control Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Project Course Practical Application of Mechatronics . . . . . . . . . . . . . . . . . . . . . . . . . . 27Application, Simulation and Control of Power Electronic Systems . . . . . . . . . . . . . . . . . . 28Autonomous Driving Lab I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.1.1.3 ADP / Seminars CS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Robotics Lab Project . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.1.2 Labs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32Laboratory Matlab/Simulink II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.3 CS-ES-NS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.1.3.1 Basics in CS-ES-NS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33Identification of Dynamic Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.1.3.2 Optionals in CS-ES-NS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Introduction to Numerical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
II
Air Transport II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36Air Transport I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37Fundamentals of Machine Acoustics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Automotive Mechatronics and Assistance Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Research Seminar Automotive Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Fundamentals of Adaptronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Trends in Automotive Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45Ride and Handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Combustion Engines II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48Structural Design of Internal Combustion Engine II . . . . . . . . . . . . . . . . . . . . . . . . . . . 50Reliability in Mechanical Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51Real-Time Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52Railway Vehicle Engineering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53Lighting Technology I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54Advanced Lighting Technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55Microprocessor Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56New Technologies of Electrical Energy Converters and Actuators . . . . . . . . . . . . . . . . . . 57Computer Systems II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59Laboratory Control Engineering II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60Software Engineering - Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61Software-Engineering - Maintenance and Quality Assurance . . . . . . . . . . . . . . . . . . . . . 62Optimization of static and dynamic systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Architecture and Design of Computer Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Image Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67Computer Vision I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68Computer Vision II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70Mechatronics Workshop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72Electric Railways . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Fast Boundary Element Methods for Engineers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74Foundations of Robotics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75Robust Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Sensor Array Processing and Adaptive Beamforming . . . . . . . . . . . . . . . . . . . . . . . . . . 77Electric drives for cars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79Machine Learning and Deep Learning for Automation Systems . . . . . . . . . . . . . . . . . . . 80Matrix Analysis and Computations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Basics of Economics for Engineers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84Autonomous Driving Lab II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85Relativistic Electrodynamics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86C/C++ Programming Lab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87Foundations of Robotics for Mechatronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88Designing the Energiewende . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89Robotics Project Seminar for Mechatronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91Project Seminar Learning Robots for Mechatronics . . . . . . . . . . . . . . . . . . . . . . . . . . . 92Machine Learning for Robotics & Mechatronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93Robotics in industry: Basics and application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94Fundamentals of Reinforcement Learning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Contents III
1 Fundamentals
1.1 Micro-technical Systems
1.2 Dynamic Systems
Module nameSystem Dynamics and Automatic Control Systems III
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-2010 4 CP 120 h 75 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 ContentTopics covered are:
• basic properties of non-linear systems,• limit cycles and stability criteria,• non-linear control of linear systems,• non-linear control of non-linear systems,• observer design for non-linear systems
2 Learning objectives / Learning OutcomesAfter attending the lecture, a student is capable of:
• explaining the fundamental differences between linear and non-linear systems,• testing non-linear systems for limit cycles,• stating different definitions of stability and testing the stability of equilibria,• recalling the pros and cons of non-linear controllers for linear systems,• recalling and applying different techniques for controller design for non-linear systems,• designing observers for non-linear systems
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 180 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Grade bonus compliant to §25 (2)
8 ReferencesAdamy: Systemdynamik und Regelungstechnik III (available for purchase at the FG office)
1
Courses
Course Nr. Course name18-ad-2010-vl System Dynamics and Automatic Control Systems III
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Lecture 2
Course Nr. Course name18-ad-2010-ue System Dynamics and Automatic Control Systems III
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Practice 1
1.2 Dynamic Systems 2
1.3 More Fundamentals
Module nameTools and Methods in Product Development
Module Nr. Credit Points Workload Self study Duration Cycle offered16-05-5080 4 CP 120 h 60 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Eckhard Kirchner
1 ContentBasics of product development and structuring of the development process. Clarification of the task andrequirement list, basics of development of new products, basics of management of product costs by re-ducing of manufacturing costs, value analysis and targeted costing; Development of environmentally safeproducts, development of products and product structures designed for variety; Basics of safety technologyand development of products designed for safety; Failure and weak-point analysis; Utilizing Prototypes;Development and Production in a globalized world.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Analyse design tasks by questioning them specifically to identify targets and central issues of thedesign task. The students are also able to translate customer’s wishes into product requirements andassess the requirement’s importance.
• Create a formal description of the design task by generating a list of requirements. The students arealso able to differentiate between customer’s wishes and requirements.
• Describe principles, advantages, and limits of simultaneous engineering and explain its relevanceand impact for practical work.
• Denominate and describe the approach and the tasks of developing a new product, using a mor-phological analysis and systematic combination of solutions, as well as being able to explain theirrelevance in innovation projects.
• Explain the principles of Total Quality Management and their implementation and relevance in com-panies. The students are also able to use FMEA as a preventive failure avoidance method.
• Differentiate the basic wording for development of products designed to security and explain theprinciples of design to security regarding their effectiveness for specific tasks and use them to developimproved products.
• Differentiate the main strategies of product cost management and knowing the basics of their genesisover the product’s lifecycle. The students should also be able to analyse cost structures using break-even-analysis, function costing and draft strategies and actions to reach the target costs and evaluatethose strategies in regard to their reach.
• Explain the approach and tasks of creating an ecobalance.• Analyse companies’ situations regarding the variety of products and identify and explain the danger
that comes from complexity.• Explain and evaluate limits of applicability of prototypes.• List the challenges of development and production in globally acting enterprises and to identify
alleviating measures.
3 Recommended prerequisite for participationNone
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)Written exam 90 min or oral exam 30 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
1.3 More Fundamentals 3
6 Usability of this moduleWP Bachelor MPE
7 Grade bonus compliant to §25 (2)
8 ReferencesU. Lindemann. Methodische Entwicklung technischer Produkte: Methoden flexibel und situationsgerechtanwenden. VDI-Buch. Springer-Verlag Berlin Heidelberg, 2009.G. Pahl;W. Beitz; J. Feldhusen; K.H. Grote. Konstruktionslehre – Grundlagen erfolgreicher Produktentwick-lung, Methoden und Anwendungen. Springer Verlag, Berlin, 2006.E. Kirchner & H. Birkhofer. Werkzeuge und Methoden der Produktentwicklung, Vorlesungsunterlagen despmd, 2018
Courses
Course Nr. Course name16-05-5080-vl Tools and Methods in Product Development
Instructor Type SWSLecture 2
Course Nr. Course name16-05-5080-ue Tools and Methods in Product Development
Instructor Type SWSPractice 2
1.3 More Fundamentals 4
Module nameReal Time Applications and Communication with Microcontrollers and programmable Logic Devices
Module Nr. Credit Points Workload Self study Duration Cycle offered18-gt-2040 4 CP 120 h 75 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Gerd Griepentrog
1 ContentMicrocontroller and programmable logic devices are being used for a variety of control tasks for industrialand residential products and systems. For the control of drives and power electronics, those devices areused for the control of frequency converters or DC/DC converters.In most of these applications, real time requirements have to be met. Simultaneously a communicationinterface has to be served.The module will impart knowledge and expertise on how to realize successfully control task.More in detail, the following content will be taught:
• Architecture of microcontroller• Structure and function of FPGAs, tools and programming languages• Typical peripheral components for microcontrollers• Capture & Compare, PWM, A/D-converter• I2C, SPI, CAN, Ethernet• Programming of microcontrollers in C• Software: real-time properties, interrupt handling, interrupt latency• Control of inductive components• Basic of circuit design for power electronics, Power-MOSFETS, IGBTsNumerical methods
2 Learning objectives / Learning OutcomesStudents will be able to:
• Separate a digital control task into HW and SW parts• Specify the HW-content in a HW description language and implement the SW by means of a micro-
controller• Evaluate the real-time capabilities of a program and to determine upper limits for the response time
of the systemTransfer the developed solution to the target system by means of a development kitand debug the software onto the target system.
3 Recommended prerequisite for participationBasic knowledge in programmig language C (syntax, operators, pointer)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 120 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleMSc MEC, MSc ETiT
7 Grade bonus compliant to §25 (2)
8 ReferencesScript, Instruction for practical lab courses, ppt-Slides; either in hard-copy or for download; User Manualsof the used devices and development kits
Courses
1.3 More Fundamentals 5
Course Nr. Course name18-gt-2040-vl Real Time Applications and Communication with Microcontrollers and programmable
Logic Devices
Instructor Type SWSProf. Dr.-Ing. Gerd Griepentrog Lecture 1
Course Nr. Course name18-gt-2040-pr Real Time Applications and Communication with Microcontrollers and programmable
Logic Devices
Instructor Type SWSProf. Dr.-Ing. Gerd Griepentrog, Prof. Dr.-Ing. Christian Hochberger Internship 2
1.3 More Fundamentals 6
Module nameSystem Dynamics and Automatic Control Systems II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-1010 7 CP 210 h 135 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 ContentMain topics covered are:
• Root locus method (construction and application),• State space representation of linear systems (representation, time solution, controllability, observ-
ability, observer- based controller design)
2 Learning objectives / Learning OutcomesAfter attending the lecture, a student is capable of:
• constructing and evaluating the root locus of given systems• describing the concept and importance of the state space for linear systems• defining controllability and observability for linear systems and being able to test given systems with
respect to these properties• stating controller design methods using the state space, and applying them to given systems• applying the method of linearization to non-linear systems with respect to a given operating point
3 Recommended prerequisite for participationSystem Dynamics and Control Systems I
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 180 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleBSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Grade bonus compliant to §25 (2)
8 ReferencesAdamy: Systemdynamik und Regelungstechnik II, Shaker Verlag (available for purchase at the FG office)
Courses
Course Nr. Course name18-ad-1010-vl System Dynamics and Automatic Control Systems II
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Lecture 3
Course Nr. Course name18-ad-1010-ue System Dynamics and Automatic Control Systems II
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Practice 2
1.3 More Fundamentals 7
Module nameDigital Control Systems I
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2020 4 CP 120 h 75 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentTheoretical fundamentals of sampled control systems:Discrete-time functions, sample/hold element, z-transform, convolution sum, z-transfer function, stabilityof sampled systems, design of digital controllers, discrete PI-, PD-, and PID-controllers, compensation anddead-beat controller, anti-windup methods
2 Learning objectives / Learning OutcomesThe students know the fundamental analysis and design methods for digital feed-forward and feed-backcontrol systems. They know the fundamental differences between continuous-time and discrete-time con-trol systems and can design and analyze discrete-time control systems using different methods.
3 Recommended prerequisite for participationHelpful is knowledge of the Laplace- and Fourier-transforms as well as continuous-time control systems.These fundamentals are taught in the lecture “System Dynamics and Control Systems I”
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleBSc/MSc Wi-ETiT, MSc ETiT, BSc/MSc CE, MSc MEC, BSc/MSc iST, MSc iCE, MSc Informatik
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture notes Konigorski: “Digitale Regelungssysteme”Ackermann: "Abtastregelung"Aström, Wittenmark: "Computer-controlled Systems"Föllinger: "Lineare Abtastsysteme"Phillips, Nagle: "Digital control systems analysis and design"Unbehauen: "Regelungstechnik 2: Zustandsregelungen, digitale und nichtlineare Regelsysteme"
Courses
Course Nr. Course name18-ko-2020-vl Digital Control Systems I
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Lecture 2
Course Nr. Course name18-ko-2020-ue Digital Control Systems I
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Practice 1
1.3 More Fundamentals 8
Module nameModeling and Simulation
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2010 4 CP 120 h 75 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 Contentaim of modeling, theoretical modeling by application of fundamental physical laws, generalized networkanalysis, modeling of distributed parameter systems, model reduction, linearization, order reduction, digi-tal simulation of linear systems, numerical integration methods
2 Learning objectives / Learning OutcomesThe students will know different techniques for the mathematical modeling of dynamic systems from var-ious domains. They will acquire the ability to digitally simulate the dynamic behavior of the modeledsystems and to systematically apply the available numerical integration methods.
3 Recommended prerequisite for participationBasic knowledge of continuous- and discrete-time control theory. Supplementary lectures are “SystemDynamics and Control Systems I and II” as well as “Digital Control Systems I and II”.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture notes Konigorski: “Modellbildung und Simulation”,Lunze: „Regelungstechnik 1 und 2“,Föllinger: „Regelungstechnik: Einführung in die Methoden und ihre Anwendung“
Courses
Course Nr. Course name18-ko-2010-vl Modeling and Simulation
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Lecture 2
Course Nr. Course name18-ko-2010-ue Modeling and Simulation
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Practice 1
1.3 More Fundamentals 9
2 Optionals in Technical and Natural Science
2.1 Basics MPE
Module nameAdvanced Dynamics
Module Nr. Credit Points Workload Self study Duration Cycle offered16-25-5060 6 CP 180 h 105 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Bernhard Schweizer
1 ContentIntroduction and definition of multibody systems.Kinematics of rigid bodies; spatial motion (translation and rotation).Formulation of constraint equations (scleronomic, rheonomic, holonomic and nonholonomic constraints);definition of generalized coordinates and virtual displacements.Kinematics of multibody systems; tree-structured systems and systems with closed loops; description ofspatial systems using absolute coordinates and relative coordinates.Kinetics of multibody systems; Newton´s law and Euler´s law; formulation of the equations of motionusing absolute coordinates (Index-3, Index-2 and Index-1 formulations) and relative coordinates.Principle of d´Alembert, principle of virtual power, Lagrange´s equations of the second kind, etc.Linearization of the equations of motion; theory for linear systems with constant coefficients.Applicationexamples: automotive engineering, robotics, gear mechanisms, engine dynamics, rotor dynamics, etc.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Mathematically describe the spatial motion of a rigid body.• Describe the kinematics of complex planar and spatial dynamical systems.• Derive the equations of motion for complex planar and spatial systems using the Newton-Euler equa-
tions.• Applying the principles of mechanics in order to derive the governing equations of motion (as an
alternative to the Newton-Euler equations).• To generate suitable mathematical models for machines, engines and mechanisms in order to
calculate the motion of the system and the forces/torques acting on the bodies.
3 Recommended prerequisite for participationTechnical Mechanics I to III (Statics, Elastomechanics, Dynamics) and Mathematics I to III recommend.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Standard Grading System)Written exam 150 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleMaster MPE PflichtWI/MB, Master Mechatronik
7 Grade bonus compliant to §25 (2)
10
8 ReferencesWoernle, C.: „Mehrkörpersysteme“, Springer, 2011.Shabana, A.: „Dynamics of Multibody Systems”, Cambridge University Press, Third Edition, 2010.Haug, E.J.: „Computer-Aided Kinematics and Dynamics of Mechanical Systems“, Allyn and Bacon, 1989.Markert, R.: „Strukturdynamik“, Shaker, 2013.Dresig, H.; Holzweißig, F.: „Maschinendynamik”, 10. Au-flage, Springer, 2011.
Courses
Course Nr. Course name16-98-4094-vl Machine Dynamics
Instructor Type SWSLecture 3
Course Nr. Course name16-98-4094-hü Advanced Dynamics
Instructor Type SWSLecture HallPractice
2
Course Nr. Course name16-25-5060-gü Advanced Machine Dynamics
Instructor Type SWSGroup Practice 0
2.1 Basics MPE 11
2.2 Basics ETiT
Module nameDigital Control Systems II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2030 3 CP 90 h 60 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentState space description of discrete-time systems, controllability, observability, state feedback controller, poleassignment, PI-state feedback controller, discrete state observers, modified Luenberger observer
2 Learning objectives / Learning OutcomesThe students know the state spacel description of sampled control systems and the corresponding analysisand design methods. They can design deadbeat controllers, state feedback controllers by pole assignmentand PI- state feedback controllers for single input systems and know how to implement state feedbackcontrollers together with a discrete- time observer.
3 Recommended prerequisite for participationKnowledge of the z-transform as well as the fundamentals of discrete-time control systems. These funda-mentals are taught in the lecture “Digital Control systems I”.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc Wi-ETiT, BSc/MSc iST, MSc MEC, MSc iCE
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture notes Konigorski: “Digitale Regelungssysteme”Ackermann: "Abtastregelung"Aström, Wittenmark: "Computer-controlled Systems"Föllinger: "Lineare Abtastsysteme"Phillips, Nagle: "Digital control systems analysis and design"Unbehauen: "Regelungstechnik 2: Zustandsregelungen, digitale und nichtlineare Regelsysteme"
Courses
Course Nr. Course name18-ko-2030-vl Digital Control Systems II
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Lecture 1
Course Nr. Course name18-ko-2030-ue Digital Control Systems II
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Practice 1
2.2 Basics ETiT 12
Module nameController Design for Multivariable Systems in State Space
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2050 5 CP 150 h 90 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentPole assignment, Coupling and decoupling of linear multivarible systems, Optimal control, Design of stateobservers, Dynamic state feedback control, Structurally constrained state feedback
2 Learning objectives / Learning OutcomesThe students will be able to analyse and design linear time-invariant multivariable systems by means ofdifferent state space design methods.
3 Recommended prerequisite for participationBasic knowledge of linear control theory ("System Dynamics and Control Systems I and II”)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesSkript Konigorski: “Mehrgrößenregler im Zustandsraum”,Anderson, Moore: "Optimal Control: Linear Quadratic Methods", Föllinger:"Regelungstechnik: Einführungin die Methoden und ihre Anwendung", Föllinger: "Optimale Regelung und Steuerung: Eine Einführungfür Ingenieure", Roppenecker: "Zeitbereichsentwurf linearer Regelungen: Grundlegende Strukturen undeine Allgemeine Methodik ihrer Parametrierung",Unbehauen: "Regelungstechnik II:Zustandsregelungen, digitale und nichtlineare Regelungssysteme",Zurmühl: "Matrizen und ihre Anwendung: Für Angewandte Mathematiker, Physiker und Ingenieure. Teil1: Grundlagen"
Courses
Course Nr. Course name18-ko-2050-vl Controller Design for Multivariable Systems in State Space
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski, M.Sc. Viktor Kisner Lecture 2
Course Nr. Course name18-ko-2050-ue Controller Design for Multivariable Systems in State Space
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski, M.Sc. Viktor Kisner Practice 2
2.2 Basics ETiT 13
3 ADP / Seminars, Labs, CS-ES-NS
3.1 ADP / Seminars
3.1.1 ADP / Seminars
3.1.1.1 ADP / Seminars MPE
Module nameADP (6 CP) Dynamics and Vibrations
Module Nr. Credit Points Workload Self study Duration Cycle offered16-62-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Peter Hagedorn
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
14
Module nameADP (6 CP) Automotive Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered16-27-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Hermann Winner
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 15
Module nameADP (6 CP) Flight Systems and Automatic Control
Module Nr. Credit Points Workload Self study Duration Cycle offered16-23-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Uwe Klingauf
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 16
Module nameADP (6 CP) Fluid Systems Technologies
Module Nr. Credit Points Workload Self study Duration Cycle offered16-10-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Peter Pelz
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 17
Module nameADP (6 CP) Mechatronic Systems in Mechanical Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered16-24-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Stephan Rinderknecht
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 18
Module nameADP (6 CP) Product Development and Machine Elements
Module Nr. Credit Points Workload Self study Duration Cycle offered16-05-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Herbert Birkhofer
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 19
Module nameADP (6 CP) Applied Dynamics
Module Nr. Credit Points Workload Self study Duration Cycle offered16-25-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr. Richard Markert
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 20
Module nameADP (6 CP) System Reliability, Adaptive Structures and Machine Acoustics
Module Nr. Credit Points Workload Self study Duration Cycle offered16-26-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Tobias Melz
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 21
Module nameADP (6 CP) Internal Combustion Engines and Powertrain Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered16-03-a061 6 CP 180 h 180 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr. techn. Christian Beidl
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesThe students become acquainted with teamwork and are able to take over responsibility for leading taskswithin the team. They learn to assess divergent positions and the necessity of common agreements ininterpersonal relationships as well as typical engineering challenges in a positive manner. They are able torecognize and specify complex problems and to distinguish between different solutions. They also studyhow to valuate the importance of an exact time and work schedule positively.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
3.1 ADP / Seminars 22
3.1.1.2 ADP / Seminars ETiT
Module nameProject Seminar Robotics and Computational Intelligence
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-2070 8 CP 240 h 180 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 ContentThe following topics are taught in the lecture:Industrial robots
• Types and applications• Geometry and kinematics• Dynamic model• Control of industrial robots
Mobile robots• Types and applications• Sensors• Environmental maps and map building• Trajectory planning
Group projects are arranged in parallel to the lectures in order to apply the taught material in practicalexercises.
2 Learning objectives / Learning OutcomesAfter attending the lecture, a student is capable of: 1. recalling the basic elements of industrial robots, 2.recalling the dynamic equations of industrial robots and be able to apply them to describe the dynamics ofa given robot, 3. stating model problems and solutions to standard problems in mobile robotics, 4. planinga small project, 5. organizing the work load in a project team, 6. searching for additional backgroundinformation on a given project, 7. creating ideas on how to solve problems arising in the project, 8. writingan scientific report about the outcome of the project 8. presenting the results of the project.
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Grade bonus compliant to §25 (2)
8 ReferencesAdamy: Lecture notes (available for purchase at the FG office)
Courses
3.1 ADP / Seminars 23
Course Nr. Course name18-ad-2070-pj Project Seminar Robotics and Computational Intelligence
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Project Seminar 4
3.1 ADP / Seminars 24
Module nameProject Seminar Automatic Control Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-2080 8 CP 240 h 180 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 ContentThe students work in small groups, supervised by a scientific staff member, on individual problems takenfrom the field of automatic control. A compulsory training course is part of the project course and willcover the topics 1. team work and project management, 2. professional presentation skills, and 3. scientificwriting skills.
2 Learning objectives / Learning OutcomesAfter attending the project course, a student is capable of: 1. planing a small project, 2. organizing the workwithin a project team, 3. searching for scientific background information on a given project, 4. creatingideas on how to solve problems arising in the project, 5. presenting the results in a scientific report, and 6.giving a talk on the results of the project.
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Oral Examination, Duration: 30 min, Standard GradingSystem)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc iST, MSc WI-ETiT, MSc iCE, MSc EPE, MSc CE, MSc Informatik
7 Grade bonus compliant to §25 (2)
8 ReferencesTraining course material
Courses
Course Nr. Course name18-ad-2080-pj Project Seminar Automatic Control Systems
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy Project Seminar 4
3.1 ADP / Seminars 25
Module nameProject Course Control Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2090 8 CP 240 h 180 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentTeams of 2 - 4 students work on different control engineering projects under the guidance of a projectcoordinator from the institute. The projects mainly cover the following subject areas:
• Modelling, analysis and design of multivariable control systems• Modelling, analysis and design of distributed parameter systems• Robust control design• System analysis, supervision and fault diagnosis• Modelling and identification
Application areas are machine tools, production lines, test benches, process control, automobiles.
2 Learning objectives / Learning OutcomesAfter completing the project the students will be familiar with the individual steps of investigating a controlengineering project. This includes in particular the compilation of a system specification as well as criticaldiscussions and systematic selection of appropriate control engineering solutions and their real technicalimplementation. Doing so the students learn the practical application of control engineering methodstaught in the lecture “System Dynamics and Control Systems I” to real world problems. Additionally, inthis project course the students are supposed to improve their professional skills. These skills include e.g.teamwork, presentation techniques and systematic information retrieval.
3 Recommended prerequisite for participationLecture “System Dynamics and Control Systems I”
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesHandouts will be distributed at start of the project (e.g. Hints for writing a project documentation, etc.)
Courses
Course Nr. Course name18-ko-2090-pj Project Course Control Engineering
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski Project Seminar 4
3.1 ADP / Seminars 26
Module nameProject Course Practical Application of Mechatronics
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2130 8 CP 240 h 180 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentTeams of 2-4 students work on different mechatronic projects under the guidance of a project coordinatorfrom the institute.The projects mainly cover the following subject areas:
• Modeling, analysis, and design of mechatronic systems• Robust control design• System analysis, supervision and fault diagnosis• Modeling and identification
Application areas are mechatronic actuators, machine tools, production lines, test benches, automobiles,quadrocopters.
2 Learning objectives / Learning OutcomesAfter completing the project, the students will be familiar with the individual steps of investigating amechatronic project. This includes in particular the compilation of a system specification as well as criticaldiscussions and systematic selection of appropriate mechatronic solutions and their real technical imple-mentation. Doing so, the students learn the practical application of mechatronic methods taught in thelectures to real world problems. Additionally, in this project course, the students are supposed to im-prove their professional skills. These skills include e.g. teamwork, presentation techniques and systematicinformation retrieval.
3 Recommended prerequisite for participationLectures „System Dynamics and Automatic Control Systems I“, „System Dynamics and Automatic ControlSystems II“
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc iST
7 Grade bonus compliant to §25 (2)
8 ReferencesHandouts will be distributed at start of the project (e.g. hints for writing project documentation, etc.)
Courses
Course Nr. Course name18-ko-2130-pj Project Course Practical Application of Mechatronics
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski, M.Sc. Julian Zeiß Project Seminar 4
3.1 ADP / Seminars 27
Module nameApplication, Simulation and Control of Power Electronic Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-gt-2030 8 CP 240 h 180 h 1 WiSe/SoSe
Language Module ownerGerman and English Prof. Dr.-Ing. Gerd Griepentrog
1 ContentIn an introductory meeting topics according to power electronics and control of drives are given to thestudents. During the seminary problems can be treated concerning the following topics:
• Simulation of power electronic systems plus analysis and evaluation of the models• Implementing and startup of power electronic systems, test stand development plus measurement of
characteristic parameters• Modeling and simulation in the field of control of electrical drives• Implementing and startup of controlled drive systems• Suggested topics from the students are welcome
The students are working autonomous on the chosen problem. The results are documented in a writtenreport and at the end of the module, a presentation about the problem must be held.
2 Learning objectives / Learning OutcomesThe Competences are:
• Autonomous familiarization with a given problem• Selection and evaluation of appropriate development tools• Familiarization with the used development tools• Practical experience in power electronics and control of drives• Logical presentation of the results in a report• Presentation skills
3 Recommended prerequisite for participationLecture „Leistungselektronik 1“ or „Einführung Energietechnik“ and ggf. „Regelungstechnik I“ or similar
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesDefinition of project task
Courses
Course Nr. Course name18-gt-2030-se Application, Simulation and Control of Power Electronic Systems
Instructor Type SWSProf. Dr.-Ing. Gerd Griepentrog, M.Sc. Pavel Makin Seminar 4
3.1 ADP / Seminars 28
Module nameAutonomous Driving Lab I
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-2070 6 CP 180 h 135 h 1 WiSe
Language Module ownerGerman Prof. Dr. rer. nat. Andreas Schürr
1 Content• Hands-on programming experience with C++ in the development of embedded software systems
for autonomous driving based on a model car• Application of control methods from the area of autonomous driving• Application of software engineering techniques (design, documentation, test, ...) of a non-trivial
embedded software system with hard real-time requirements and limited resources (memory, ...)• Use of a given software framework and further libraries including a modular (real-time) operating
system• Hands-on experience using source code management systems, time management and other project
management tools• Presentations of the project results
2 Learning objectives / Learning OutcomesDuring this project seminar students gain practical experience in software development for embeddedsystems in the field of autonomous driving using a model car. In teamwork, they learn to cope with anextensive task. In order to solve this task they practice to use the theoretical knowledge available in thegroup (from other courses such as real-time systems, software engineering - introduction, C++ lab, digitalcontrol systems).Students that have successfully participated in this project seminar are able to organize and set-up a non-trivial software project in an interdisciplinary team according to a given problem independently. Theparticipants acquire the following skills in detail:
• Independent familiarization with a given software framework and ready-made libraries• Transfer of theoretic knowledge into a software system• Extensive use of tools for version, configuration, and change management• Realistic time and resource management (project management)• Development of hardware/software systems with C++ considering important limitations of embed-
ded systems• Planning and implementation of extensive quality assurance measures• Collaboration and communication in and between teams
3 Recommended prerequisite for participationRecommended prerequisites are:
• ETiT/DT, iST, Informatik, WI-ET/DT: Basic software technology knowledge and advanced knowledgeof object-oriented programming languages (especially C++)
Additionally desired:• Basic knowledge of the development of real-time systems or image processing• ETiT/AUT, MEC: Basic knowledge in control engineering including state space control design, some
additional basic knowledge in digital control design may be helpful
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Oral Examination, Duration: 30 min, Standard GradingSystem)
5 Grading
3.1 ADP / Seminars 29
Module Final Examination:• Module Examination (Study Achievement, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, BSc iST
7 Grade bonus compliant to §25 (2)
8 Referenceshttps://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/ps-af-i/ and Moodle
Courses
Course Nr. Course name18-su-2070-pj Autonomous Driving Lab I
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr, Dr. Ing. Eric Lenz, M.Sc. Stefan Tomaszek Project Seminar 3
3.1 ADP / Seminars 30
3.1.1.3 ADP / Seminars CS
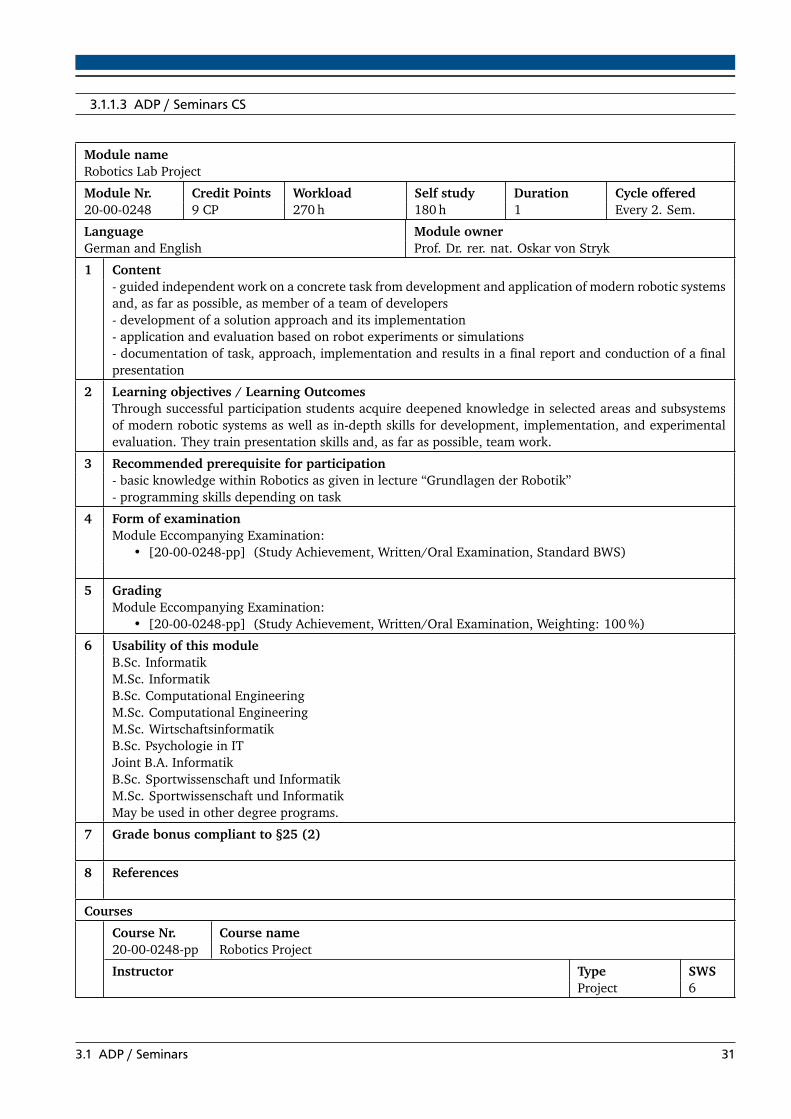
Module nameRobotics Lab Project
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0248 9 CP 270 h 180 h 1 Every 2. Sem.
Language Module ownerGerman and English Prof. Dr. rer. nat. Oskar von Stryk
1 Content- guided independent work on a concrete task from development and application of modern robotic systemsand, as far as possible, as member of a team of developers- development of a solution approach and its implementation- application and evaluation based on robot experiments or simulations- documentation of task, approach, implementation and results in a final report and conduction of a finalpresentation
2 Learning objectives / Learning OutcomesThrough successful participation students acquire deepened knowledge in selected areas and subsystemsof modern robotic systems as well as in-depth skills for development, implementation, and experimentalevaluation. They train presentation skills and, as far as possible, team work.
3 Recommended prerequisite for participation- basic knowledge within Robotics as given in lecture “Grundlagen der Robotik”- programming skills depending on task
4 Form of examinationModule Eccompanying Examination:
• [20-00-0248-pp] (Study Achievement, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0248-pp] (Study Achievement, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikMay be used in other degree programs.
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name20-00-0248-pp Robotics Project
Instructor Type SWSProject 6
3.1 ADP / Seminars 31
3.1.2 Labs
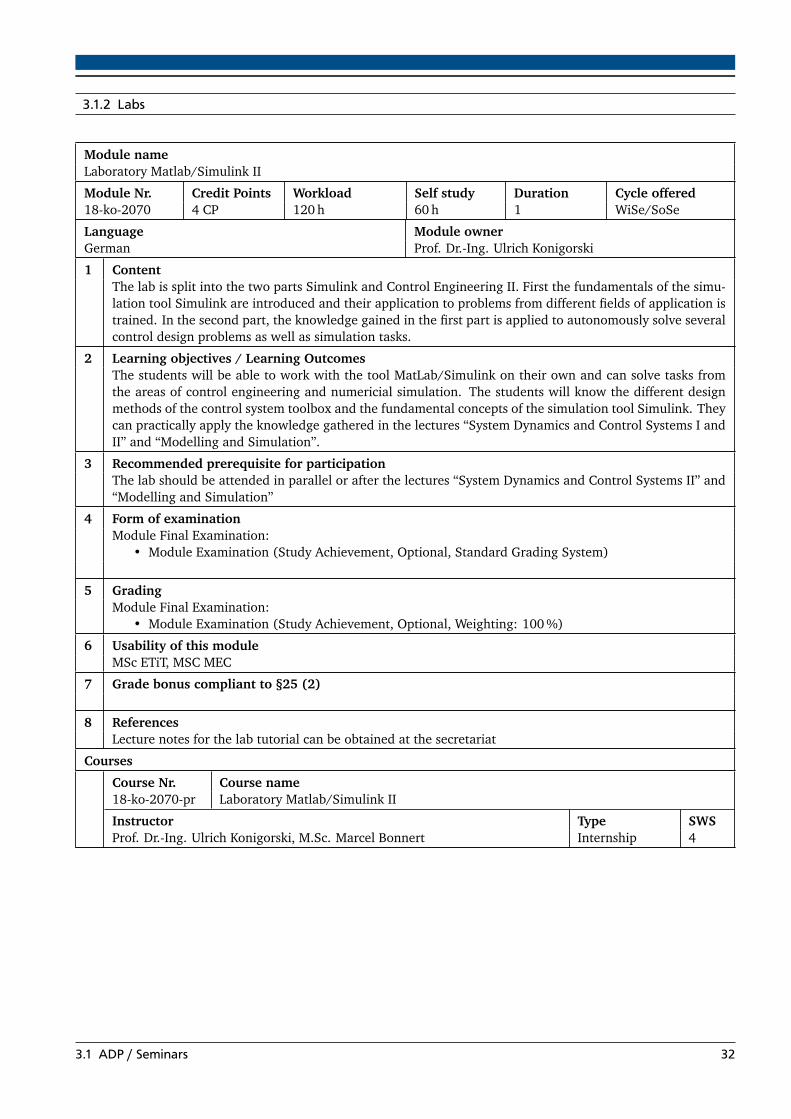
Module nameLaboratory Matlab/Simulink II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2070 4 CP 120 h 60 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 ContentThe lab is split into the two parts Simulink and Control Engineering II. First the fundamentals of the simu-lation tool Simulink are introduced and their application to problems from different fields of application istrained. In the second part, the knowledge gained in the first part is applied to autonomously solve severalcontrol design problems as well as simulation tasks.
2 Learning objectives / Learning OutcomesThe students will be able to work with the tool MatLab/Simulink on their own and can solve tasks fromthe areas of control engineering and numericial simulation. The students will know the different designmethods of the control system toolbox and the fundamental concepts of the simulation tool Simulink. Theycan practically apply the knowledge gathered in the lectures “System Dynamics and Control Systems I andII” and “Modelling and Simulation”.
3 Recommended prerequisite for participationThe lab should be attended in parallel or after the lectures “System Dynamics and Control Systems II” and“Modelling and Simulation”
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSC MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture notes for the lab tutorial can be obtained at the secretariat
Courses
Course Nr. Course name18-ko-2070-pr Laboratory Matlab/Simulink II
Instructor Type SWSProf. Dr.-Ing. Ulrich Konigorski, M.Sc. Marcel Bonnert Internship 4
3.1 ADP / Seminars 32
3.1.3 CS-ES-NS
3.1.3.1 Basics in CS-ES-NS
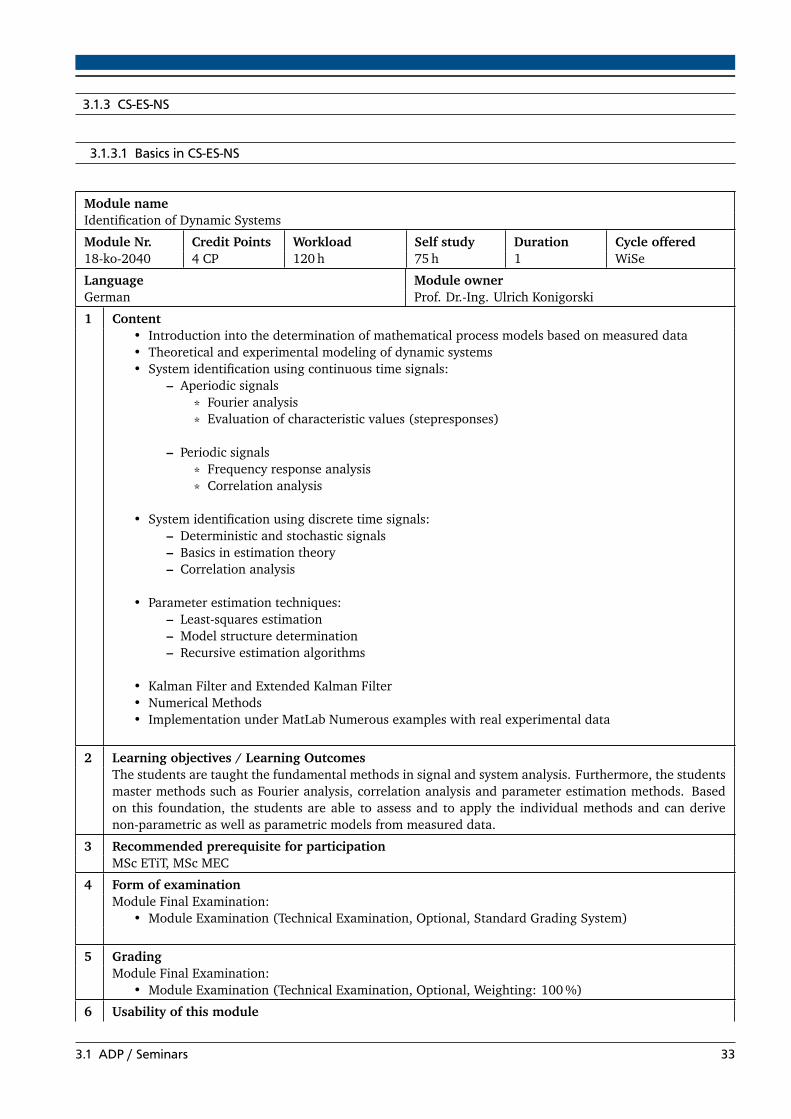
Module nameIdentification of Dynamic Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2040 4 CP 120 h 75 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 Content• Introduction into the determination of mathematical process models based on measured data• Theoretical and experimental modeling of dynamic systems• System identification using continuous time signals:
– Aperiodic signals
* Fourier analysis
* Evaluation of characteristic values (stepresponses)
– Periodic signals
* Frequency response analysis
* Correlation analysis
• System identification using discrete time signals:– Deterministic and stochastic signals– Basics in estimation theory– Correlation analysis
• Parameter estimation techniques:– Least-squares estimation– Model structure determination– Recursive estimation algorithms
• Kalman Filter and Extended Kalman Filter• Numerical Methods• Implementation under MatLab Numerous examples with real experimental data
2 Learning objectives / Learning OutcomesThe students are taught the fundamental methods in signal and system analysis. Furthermore, the studentsmaster methods such as Fourier analysis, correlation analysis and parameter estimation methods. Basedon this foundation, the students are able to assess and to apply the individual methods and can derivenon-parametric as well as parametric models from measured data.
3 Recommended prerequisite for participationMSc ETiT, MSc MEC
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this module
3.1 ADP / Seminars 33
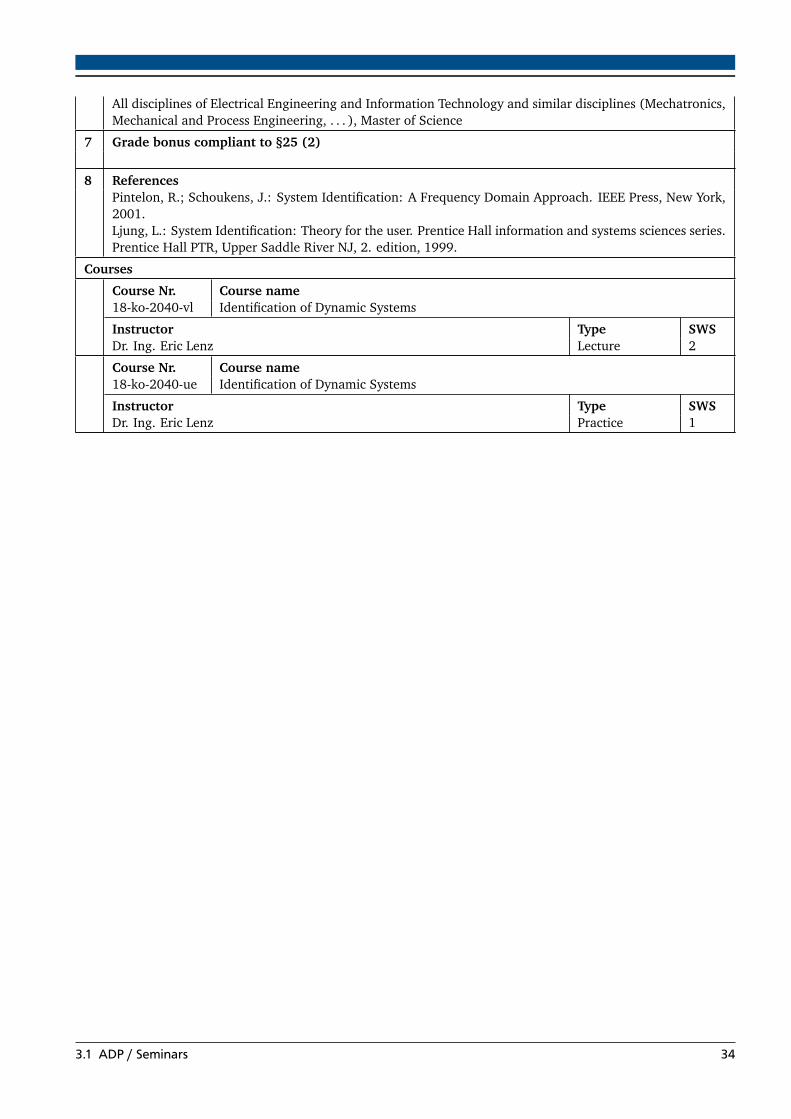
All disciplines of Electrical Engineering and Information Technology and similar disciplines (Mechatronics,Mechanical and Process Engineering, . . . ), Master of Science
7 Grade bonus compliant to §25 (2)
8 ReferencesPintelon, R.; Schoukens, J.: System Identification: A Frequency Domain Approach. IEEE Press, New York,2001.Ljung, L.: System Identification: Theory for the user. Prentice Hall information and systems sciences series.Prentice Hall PTR, Upper Saddle River NJ, 2. edition, 1999.
Courses
Course Nr. Course name18-ko-2040-vl Identification of Dynamic Systems
Instructor Type SWSDr. Ing. Eric Lenz Lecture 2
Course Nr. Course name18-ko-2040-ue Identification of Dynamic Systems
Instructor Type SWSDr. Ing. Eric Lenz Practice 1
3.1 ADP / Seminars 34
3.1.3.2 Optionals in CS-ES-NS
All modules previously listed in the areas ADP / Seminars MPE as well as all project seminars of the area ADP /Seminars ETiT
Module nameIntroduction to Numerical Analysis
Module Nr. Credit Points Workload Self study Duration Cycle offered04-00-0013 9 CP 270 h 180 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Jens Lang
1 ContentCondition, systems of linear and nonlinear equations, least squaresminimization, interpolation, integration and differentiation, differentialequations, difference schemes, programming exercises.
2 Learning objectives / Learning Outcomes
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name04-00-0056-vu Introduction to Numerical Analysis
Instructor Type SWSProf. Dr. rer. nat. Jens Lang Lecture & Prac-
tice6
3.1 ADP / Seminars 35
Module nameAir Transport II
Module Nr. Credit Points Workload Self study Duration Cycle offered13-J0-M009 3 CP 90 h 60 h 1 Every 2. Sem.
Language Module ownerEnglish Prof. Dr.-Ing. Manfred Boltze
1 Content- Legal aspects- Airport capacity, siting and airport master planning- Apron planning and operations- Planning and requirements of airport terminals- Aviation area planning- Air freight- Intermodal connections- Orientation systems in complex traffic structures
2 Learning objectives / Learning OutcomesStudents have a deepened understanding for the various areas and challenges of airports.They have the ability to solve very complex problems (esp. of airport planning) on their own, based onscientific principles. They are able to elaborate, explain, and evaluate solutions in different areas and todraw and justify conclusions on that basis.
3 Recommended prerequisite for participationRecommended: Air Transport I (13-J0-M003)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Duration: 60 min, Stan-dard Grading System)
Subject Examination: Oral Examination (20 min.) / Written Examination (60 min.)Type of examination: The examination is oral. If there is a recognizable permanent increase in the numberof participants (from about 50 persons), the examination form will be changed to writing.
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Weighting: 1)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 ReferencesHandouts and professional articles
Courses
Course Nr. Course name13-J0-0004-vl
Instructor Type SWSLecture 2
3.1 ADP / Seminars 36
Module nameAir Transport I
Module Nr. Credit Points Workload Self study Duration Cycle offered13-J0-M003 6 CP 180 h 120 h 1 Every 2. Sem.
Language Module ownerEnglish Prof. Dr.-Ing. J Stefan Bald
1 Content- Traffic situation at airports- Methods for planning and design of terminals and terminal facilities- Air traffic control- Landside access, rail connection- Planning, equipping, dimensioning, structural design and operation of air traffic infrastructure- Apron servicesThe students have to provide a written homework assignment based on the lectures.
2 Learning objectives / Learning OutcomesThe students have a deep understanding of the methods of airport planning and operation and its interac-tions with other parts of engineering and environment.They have the ability to solve complex problems (esp. of this field) on their own, based on scientific prin-ciples.They have a deepened ability to identify possible solutions, to weigh them up, to decide and to present anddefend their decisions.
3 Recommended prerequisite for participationRecommended: Verkehr I (13-J0-M001) und Verkehr II (13-J0-M002)
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Written/Oral Examination, Pass/Fail Grading System)• Module Examination (Technical Examination, Written Examination, Duration: 90 min, Standard
Grading System)Study Achievement: Homework Assignment and Colloquium (20 min.)The study achievement consists of two certificates. One of these is the homework assignment, whichconsists of a report covering the contents of the lecture. The second certificate covers the subsequentcolloquium. Both certificates must be provided for the successful completion of the study achievement. Itis recommended to work on the report in parallel with the lecture.
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Written/Oral Examination, Weighting: 0)• Module Examination (Technical Examination, Written Examination, Weighting: 1)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 ReferencesWill be announced at the beginning of the course.
Courses
Course Nr. Course name13-J0-0005-vl
Instructor Type SWSLecture 2
3.1 ADP / Seminars 37
Course Nr. Course name13-J0-0006-ue
Instructor Type SWSPractice 2
3.1 ADP / Seminars 38
Module nameFundamentals of Machine Acoustics
Module Nr. Credit Points Workload Self study Duration Cycle offered16-26-5070 6 CP 180 h 135 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Tobias Melz
1 ContentThe module includes the explanation and application of fundamental terms in technical acoustics (e.g.,frequency, sound pressure, sound power, sound intensity, particle velocity, specific acoustic impedance,levels), level arithmetic, frequency analysis, acoustic filter and weighting functions, fundamental equationof machine acoustics, mirror sound sources and interference, various types of acoustic radiators, varioussound power measurement methods
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Know the various physical quantities relevant for (technical) acoustics, explain the differences be-tween them, and derive or combine such quantities from/with each other.
• Calculate levels of various physical/acoustic quantities and perform various level calculations suchas the total or average level of several sound sources.
• Explain the fundamentals of Fourier/frequency analysis and recognize the advantages and drawbacksof various ways to present results of frequency analyses.
• Distinguish various acoustic filter functions and calculate octave band and one-third octave bandspectra from given narrowband spectra.
• Apply acoustic weighting functions (such as A-, C- or Z-weighting) in a meaningful manner andexplain the reasons for implementing such weighting curves.
• Explain the physical sound generation mechanisms of dynamically excited machine structures.• Recognize the chain of sound generation from the dynamic excitation up to the sound radiation
based on the fundamental equation of machine acoustics.• Recognize the influence and the effects of mirror sound sources and consider these when analyzing
acoustic measurements.• Explain the various types of acoustic radiators and their characteristics.• Know various methods of sound power measurements and their advantages and drawbacks.
3 Recommended prerequisite for participationno specific knowledge is required except a recommendation of basic understanding in machine dynamics,mechanics, physics, and machine elements.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 120 min, StandardGrading System)
Written exam 2 h
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Wahlfächer aus Natur- und Ingenieurwissenschaft)
7 Grade bonus compliant to §25 (2)
8 References
3.1 ADP / Seminars 39
comprehensive class notes (two volumes, approx. 1100 pages for “Machine Acoustics – Fundamentals1+2”) available for purchaseadditional recommended text books:Kollmann, F.G.: „Maschinenakustik“, 2. Auflage, Springer-Verlag, 2000Kollmann, F.G., Schösser, T.F., Angert, R.: „Praktische Maschinenakustik“, Springer-Verlag, 2006Henn, H., Sinambari, G.R., Fallen, M.: „Ingenieurakustik“, 4. Auflage, Vieweg+Teubner Verlag, 2008Schirmer, W. (Hrsg.): „Technischer Lärmschutz“, 2. Auflage, Springer-Verlag, 2006Möser, M.: „Technische Akustik“, 9. Auflage, Springer-Verlag, 2012Müller, G., Möser, M. (Hrsg.): „Taschenbuch der Technischen Akustik“, 3. Auflage, Springer-Verlag, 2004Möser, M. (Hrsg.): „Messtechnik der Akustik“, Springer-Verlag, 2010Bies, D.A., Hansen, C.H.: „Engineering Noise Control: Theory and Practice“, 4. Auflage, 2009Vér, I.L., Beranek, L. L.: „Noise and Vibration Control Engineering“, 2. Auflage, John Wiley & Sons, 2005Rossing, T.D. (Hrsg.): „Springer Handbook of Acoustics“, Springer-Verlag, 2007.
Courses
Course Nr. Course name16-26-5070-vl Fundamentals of Machine Acoustics
Instructor Type SWSLecture 3
3.1 ADP / Seminars 40
Module nameAutomotive Mechatronics and Assistance Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered16-27-5040 6 CP 180 h 105 h 1 SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Hermann Winner
1 ContentElectric power supply and hybrid systems; drivetrain, brake and steering mechatronics; driver and driverassistance models; measurement techniques of sensors; vehicle dynamics sensors; surrounding sensors; in-frastructure depending sensors; actuators for engine, brakes, and steering; longitudinal control assistance;lateral control assistance; information and warning systems; active collision protection systems, safety,navigation and telematics; future assistance systems.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• List the requirements for a vehicle’s electrical power supply system and explain the structure andprinciples of its main components.
• Illustrate different types of hybrid-electric power trains and the mode of operation of a fuel cell.• Conduct a competent discussion about the future power train concepts as well as future power supply
systems.• Illustrate the operating mode of active and mechatronical suspension, power train, brake, and steer-
ing components.• Classify driver assistance systems according to their category and operating mode.• Indicate special difficulties at recognising the vehicle’s surrounding field and describe the conse-
quences of these difficulties for the system utilisation.• Explain the effect chain of the sensors from detection over perception up to surrounding field repre-
sentation for ultrasonic, radar, lidar, and video.• Describe the basic functions and the function limits of automatically acting driver assistance systems
and collision mitigation systems.• Evaluate the benefits and modes of action of vehicle safety systems and illustrate the course of an
accident and describe a crash test.• Illustrate the function of the modules necessary in the vehicle for navigation and conduct a
competent discussion about the state of the art and the prospects of traffic telematics systems andassistance systems.
3 Recommended prerequisite for participationFundamentals of automotive engineering
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)Written exam 90 min or oral exam 45 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)WI/MB, MSc Traffic&Transport, (Vertiefungsmodul FB16, ggf. Auflage), Master Mechatronik, MSc. Infor-matik (Anwendungsfach Fahrzeugtechnik, Spezialisierung)
7 Grade bonus compliant to §25 (2)
8 References
3.1 ADP / Seminars 41
Manuscript; e-Learning Materials via Moodle
Courses
Course Nr. Course name16-27-5040-vl Automotive Mechatronics and Assistance Systems
Instructor Type SWSLecture 3
Course Nr. Course name16-27-5040-ue Automotive Mechatronics and Assistance Systems
Instructor Type SWSPractice 2
3.1 ADP / Seminars 42
Module nameResearch Seminar Automotive Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered16-27-5100 4 CP 120 h 120 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Hermann Winner
1 ContentCurrent research topic from the general area of the administering institute.
2 Learning objectives / Learning OutcomesStudents who have attended this course have a command of basic scientific methodology. They can inde-pendently familiarize themselves with a new topic and know where to find relevant scientific literature indatabases, libraries and third-party sources. The students can structure a given task and organise a realistictime schedule. Furthermore, the students can formulate the results in written and oral form in an acceptedscientific manner. Finally, they are capable of conducting a critical scientific discourse and debate withother participants of the course.
3 Recommended prerequisite for participationPossible prerequisites will be prescribed by the individual institute supervising the project.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceswill depend on topic; available upon announcement
Courses
Course Nr. Course name16-27-5100-fs Research Seminar Automotive Engineering
Instructor Type SWSResearch Semi-nar
0
3.1 ADP / Seminars 43
Module nameFundamentals of Adaptronics
Module Nr. Credit Points Workload Self study Duration Cycle offered16-26-5030 4 CP 120 h 90 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Holger Hanselka
1 ContentDefinitions of smart passive, adaptive, and active systems; multifunctional materials; piezoceramics, shapememory materials, electro- and magnetorheological fluids, dielectric polymers; actuators; smart dampers,adaptive absorbers, inertial mass actuators, active mounts; design process and principles; methods forvibration control; feedback control; electromechanical analogy, shunt damping; applications.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Analyze mechatronic and smart, i.e., adaptronic structural systems.• Explain major vibration control principles, their mode of operation, and the enhanced potentials of
smart systems such as piezoceramics, shape memory alloys, or smart fluids as well as evaluate smartvibration control solutions.
• Analyse physical principles, characteristics, and limitations of smart materials and evaluate and selectsuitable mechanisms for certain boundary conditions.
• Explain smart actuators for vibration control and select suitable mechanisms for certain boundaryconditions.
• Evaluate application possibilities of smart structural solutions and their limitations.
3 Recommended prerequisite for participationvibration technology
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)Oral exam 30 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)Master Mechatronik
7 Grade bonus compliant to §25 (2)
8 Referencescopies of transperanciesFuller, C., Elliot, S., Nelson, P.: Active Control of Vibration. London: Academic Press 1996Hansen, C.H. , Snyder, S.D.: Active Control of Noise and Vibration, London: E&FN Spon 1997Ruschmeyer, K., u.a.: Piezokeramik. Rennigen-Malmsheim: expert verlag 1995Utku, S.: Theory of Adaptive Structures, Boca Raton: CRC Press LLC 1998Duerig, T.W.: Engineering Aspects of Shape Memory Alloys, London, Butterworth-Heinemann, 1990
Courses
Course Nr. Course name16-26-5030-vl Fundamentals of Adaptronics
Instructor Type SWSLecture 2
3.1 ADP / Seminars 44
Module nameTrends in Automotive Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered16-27-5030 4 CP 120 h 90 h 1 SoSe
Language Module ownerEnglish Prof. Dr. rer. nat. Hermann Winner
1 ContentGlobal mobility; development trends; current research activities: system and function development onadvanced driver assistance systems, vehicle dynamics control, motorcycles research, testing requirementsand functional safety, brake system development, driving simulators.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:1. Competently report and discuss about present and forward-looking technologies in the fields of chassissystems and components, driver assistance systems, motorcycles, functional safety, brake system develop-ment as well as driving simulators.2. State current developments.3. Evaluate possibilities and limitations of distinct approaches.
3 Recommended prerequisite for participationAdvanced knowledge of automotive engineering as e.g. provided in “Ride and Handling” or "Auto¬motiveMechatronics and Assistance Systems"
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)Written exam 90 min or oral exam 30 min.
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 ReferencesManuscript, e-Learning Materials via Moodle
Courses
Course Nr. Course name16-27-5030-vl Trends in Automotive Engineering
Instructor Type SWSLecture 2
3.1 ADP / Seminars 45
Module nameRide and Handling
Module Nr. Credit Points Workload Self study Duration Cycle offered16-27-5020 6 CP 180 h 105 h 1 WiSe
Language Module ownerGerman Prof. Dr. rer. nat. Hermann Winner
1 ContentLongitudinal and lateral dynamics; tyre influence on vehicle dynamics; vehicle dynamics control; suspen-sion and kinematics; noise vibration harshness. Modelling of tyre, wheel, quarter car as well as longitudinaland lateral vehicle dynamics.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Derive vehicle longitudinal dynamics (achievable acceleration, deceleration and maximum velocity)from driving and frictional conditions as well as from the design of the power train and the brakesystem.
• Employ the basic equations of lateral dynamics with the fundamental motion and force dimensionsof the single-track model and describe and assess vehicle behaviour at steady state skidpad testingas well as at load changes during curve-driving.
• Discuss measures which influence a vehicle’s self-steering properties.• Explain the transmission of lateral forces between the road and tyre and discuss the interaction
between longitudinal and lateral forces.• Locate the significance of tyres to vehicle vertical dynamics.• Substantiate the principal ESP estimation and control processes as well as to explain their meaning
regarding to vehicle dynamics control.• Explain the effects of the kinematics of the wheel suspension on the vehicle handling, describe the
axle kinematics, determine the position of the instantaneous centres of rotation for the vehicle’s pitchand rolling axis, and sketch the distribution of the forces in a vehicle’s suspension.
• Describe the vibrations which can occur in a vehicle and name its respective sources as well as therelevance of its resonance frequencies.
• List comfort measures and its assessing standards.• List steady and unsteady state road trials for handling and assessment and refer to results of road
trials for making conclusions about handling characteristics.• Derive a modell of tyres, wheels, quarter car as well as longitudinal and lateral vehicle dynamics
and technically discuss the simulation results.
3 Recommended prerequisite for participationFundamentals of automotive engineering, basic knowledge of technical mechanics (force diagram, equa-tions of motion), basic knowledge of thermodynamics, basic knowledge of vibrations
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)Written Exam 90 min or oral Exam 50 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)WI/MB, MSc Traffic&Transport, (Vertiefungsmodul FB16, ggf. Auflage), Master Mechatronik, MSc. Infor-matik (Anwendungsfach Fahrzeugtechnik, Spezialisierung)
7 Grade bonus compliant to §25 (2)
3.1 ADP / Seminars 46
8 Referencesmanuscript, e-Learning Materials via Moodle
Courses
Course Nr. Course name16-27-5020-vl Ride and Handling
Instructor Type SWSLecture 3
Course Nr. Course name16-27-5020-ue Ride and Handling
Instructor Type SWSPractice 2
3.1 ADP / Seminars 47
Module nameCombustion Engines II
Module Nr. Credit Points Workload Self study Duration Cycle offered16-03-5020 6 CP 180 h 135 h 1 SoSe
Language Module ownerGerman Prof. Dr. techn. Christian Beidl
1 Content• Electronic motor management: Configuration and structure, actuators and sensors, main functions,
application, interfaces.• Ignition and combustion of hydrocarbons: Kinetic gas theory, internal combustion, correlation be-
tween in-cylinder pressure and heat release, efficiency, basics of the combustion (SI-engine / diesel-engine), abnormal combustion, combustion chamber shape and combustion processes.
• Emissions: Components, corruptive effects, formation, influence of the operating point, internalmotoric methods, aftertreatment, measuring systems, emission tests.
• Charge cycle: Influence of the charge cycle on engine characteristics, systems, camshaft drivetrains,parameters of the charge cycle, variable valve timing, special solutions.
• Charging: Characteristics and advantages of charging, different systems, design criterion for tur-bocharging, multi-stage charging, performed variants.
• Noise: Basics, sources, measures against noise, regulations• Hybrid systems: Basics, functionalities, classification, components, challenges, research methods and
certification, performed variants.• Acquisition and analysis of engine indication: Measurement chain, measurement of pressure and
cylinder capacity, analysis, calculation of heat release, characteristic resultsDesign of experiments.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Explain the different internal combustion engines and describe theoretically the processes.• Design combustion chambers with the knowledge acquired on the connenction of combustion cham-
ber shape, combustion processes, and ignition.• Define the emergence of emissions of engines (exhaust, noise) and describe the avoiding of emis-
sions.• Describe the charge chaniging of a combustion engine, identify variants, and advance engines• Recognize the importance of charging and the variants.• Explain hybrid technology.• Reproduce specific measuring methods in the fields of optimizing engines (indication, design of
experiments).
3 Recommended prerequisite for participationNone
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)oral or written (optional)written exam 1 h 30 min;oral exam: 1 h 30 min (per group of 4)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE II (Kernlehrveranstaltungen aus dem Maschinenbau)Master Mechatronik
7 Grade bonus compliant to §25 (2)
3.1 ADP / Seminars 48
8 ReferencesVKM II - script, available at the secretariat
Courses
Course Nr. Course name16-03-5020-vl Combustion Engines II
Instructor Type SWSLecture 3
3.1 ADP / Seminars 49
Module nameStructural Design of Internal Combustion Engine II
Module Nr. Credit Points Workload Self study Duration Cycle offered16-03-5060 4 CP 120 h 90 h 1 WiSe
Language Module ownerGerman Prof. Dr. techn. Christian Beidl
1 ContentEngine lubrication: Requirements, different systems, oil pumps, oil filter and oil system, damage.Air cleaner and intake pipe: Requirements, air cleaner, intake pipes.Cooling system: Different systems, components.Exhaust system: Requirements, silencers, aftertreatment, strains.Governor: Requirements, function, centrifugal governor, full-load stops.In-line type injection pump: Requirements, feed pump, function of the plunger elements, differences to thedistribution pump.Distribution pump: Requirements, functions.Radial plunger distribution pump: Requirements, functions.Pump-injector-system: Requirements, pump-injector-system, pump-liner-injector-system.Common rail: Requirements, functions.Charging: Requirements, different systems, function of the systems, advantages and disadvantages.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Describe the engine subsystems of an internal combustion engine (cooling system, lubrication sys-tem, charging systems etc.) concerning the mode of operation, tasks, and requirements.
• Describe the constructive design of components.• Compare and evaluate different constructions.
3 Recommended prerequisite for participationVKM I and II is recommended
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)oral / written (optional) written exam: 1 h 30 min; oral exam: 1 h 30 min (per group of 4)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)Master Mechatronik
7 Grade bonus compliant to §25 (2)
8 ReferencesStructual Design II - script, available at the secretariat
Courses
Course Nr. Course name16-03-5060-vl Structural Design of Internal Combustion Engine II
Instructor Type SWSLecture 2
3.1 ADP / Seminars 50
Module nameReliability in Mechanical Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered16-26-5020 4 CP 120 h 90 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Holger Hanselka
1 ContentBasic concepts, charateristics and standards of reliability analysis; fundamentals of statistic, probabilitytheory, distribution functions and hypothesis testing; graphical and computational estimation methods;statistical interference model; test strategies and sampling methods.
2 Learning objectives / Learning OutcomesAfter successfully completing this module, students should be able to:1. Plan and conduct reliability tests.2. Determine and interpret reliability analyses from experimental data.3. Interpret the statistical correlations between stress and strength when assessing reliability.4. Perform a graphical reliability analysis based on a Weibull distribution.5. Apply problem-oriented methods of estimation for reliability analysis.6. Select an appropriate analysis from the basis of the acquired advantages and disadvantages of graphicaland computational reliability analysis.
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 120 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referencesclass notes „Reliability in Mechanical Engineering“O’Connor, P.D.T.: Practical Reliability Engineering, 4. Edition, Wiley, 2002
Courses
Course Nr. Course name16-26-5020-vl Reliability in Mechanical Engineering
Instructor Type SWSLecture 2
3.1 ADP / Seminars 51
Module nameReal-Time Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-2020 6 CP 180 h 120 h 1 SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Andreas Schürr
1 ContentThe lecture basically covers a model-driven software engineering process which is specially customizedfor real-time systems. This process is more deeply explored in the exercise using an automotive example.A focus is laid on object-oriented techniques. In this context, a real-time specific state-of-the-art CASEtool is introduced and used. Furthermore, fundamental characteristics of real-time systems and systemarchitectures are introduced. Scheduling algorithms are discussed to get insights into real-time operatingsystems. Finally, a comparison between the Java programming language and its expansion for real-timeoperating systems (RT Java) will conclude the lecture.
2 Learning objectives / Learning OutcomesStudents, who have successfully attended this lecture have acquired skills needed for the model-driven andobject-oriented development of embedded real-time systems. This includes a deeper understanding of thefollowing topics:
• classification of real-time systems• create and analyze executable models• application of real-time scheduling algorithms• evaluation and comparison of pros/cons of real-time programming languages as well as real-time
operating systems
3 Recommended prerequisite for participationBasic knowledge of software engineering techniques and excellent knowledge of at least one object-oriented programming language (preferably Java)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, BSc iST, MSc Wi-ETiT, BSc Informatik
7 Grade bonus compliant to §25 (2)
8 Referenceswww.es.tu-darmstadt.de/lehre/es/
Courses
Course Nr. Course name18-su-2020-vl Real-Time Systems
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr Lecture 3
Course Nr. Course name18-su-2020-ue Real-Time Systems
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr Practice 1
3.1 ADP / Seminars 52
Module nameRailway Vehicle Engineering
Module Nr. Credit Points Workload Self study Duration Cycle offered18-bi-2050 3 CP 90 h 60 h 1 SoSe
Language Module ownerGerman Prof. Dr. techn. Dr.h.c. Andreas Binder
1 ContentFrom the comprehensive and interdisciplinary domain of the railway technology (vehicle technology, sig-nal and safety technology, construction engineering and railway operating technology) the lecture picksout the domain of the automotive engineering with the emphasis of the mechanical part. It offers an in-terrelated introduction into selected chapters of the rail vehicle engineering with special emphasis in therailway-specific technical solutions and procedures. The lecture is divided into 7 chapters, whereby fourchapters the theoretical basic topics cover and three chapters the fundamental components of the rail ve-hicle present.In a one-day excursion, it is possible to gain insights into the production of modern rail vehicles. Participa-tion is voluntary.
2 Learning objectives / Learning OutcomesBasic understanding of mechanical parts of railways and their components.
3 Recommended prerequisite for participationBachelor in Electrical Engineering, Mechatronics or Mechanical Engineering
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Duration: 90 min, Stan-dard Grading System)
In general, the examination takes place in form of a written exam (duration: 90 minutes). If up to 20students register in semesters in which the lecture does not take place, there will be an oral examination(duration: 30 min.). The type of examination will be announced within one working week after the end ofthe examination registration phase.
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc EPE, MSc WI-ETiT
7 Grade bonus compliant to §25 (2)
8 ReferencesReferences/Textbooks: Detailed textbook; Filipovic, Z: Elektrische Bahnen. Springer, Berlin, Heidelberg,1995. Obermayer, H.J.: Internationaler Schnellverkehr.Franckh-Kosmos, Stuttgart, 1994.
Courses
Course Nr. Course name18-bi-2050-vl Railway Vehicle Engineering
Instructor Type SWSLecture 2
3.1 ADP / Seminars 53
Module nameLighting Technology I
Module Nr. Credit Points Workload Self study Duration Cycle offered18-kh-2010 5 CP 150 h 90 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Khanh Quoc Tran
1 ContentStructure and functionality of the human eye, terms and unit in lighting technology, photometry, radio-metric and photometric properties of materials, filters, physiology of vision, colour theory, lighting, lightsources.Measurement of luminous flux, luminous intensity, illuminance, luminance, determination of the spectralresponsivity function of the human eye, colorimetry colour rendering, colour as traffic signals, measuringof optical material characteristics, LED properties
2 Learning objectives / Learning OutcomesTo list and connect terms, units and radiometric and photometric properties of materials in lighting tech-nology, to describe and understand structure and functionality of the human eye and the physiology ofvision, to illustrate basics of lighting, measuring methods and application.Being able to measure base items in lighting technology, applying knowlegde of lighting and enhance themwith experiments. Developing a better understanding for light and color.
3 Recommended prerequisite for participationMSc ETiT, MSc Wi-ETiT, MSc MEC
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Duration: 30 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesScript for lecture: Lighting Technology IExcersisebook: laboratory: lighting technology I
Courses
Course Nr. Course name18-kh-2010-vl Lighting Technology I
Instructor Type SWSProf. Dr.-Ing. Khanh Quoc Tran Lecture 2
Course Nr. Course name18-kh-2010-pr Lighting Technology I
Instructor Type SWSProf. Dr.-Ing. Khanh Quoc Tran Internship 2
3.1 ADP / Seminars 54
Module nameAdvanced Lighting Technology
Module Nr. Credit Points Workload Self study Duration Cycle offered18-kh-2020 5 CP 150 h 90 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Khanh Quoc Tran
1 ContentChosen topics in lighting technology – current developments and applications: Street lighting, Physiology:Detektion / Glare / Lighing and Health, LED – Generation of white Light / State of the Art, Modern Methodsof Light Measurement, Interiour Lighting, Display Technologies, Non-visual Light Impacts,UV-Applications,Automotive Lighting, Solar Modules.
2 Learning objectives / Learning OutcomesTo know current developments and applications, list and connect terms, to illustrate special topics oflighting, measuring methods and application.Beeing able to measure base items in lighting technology, applying knowlegde of lighting and dedicatedapplications and further to enhance them with experiments. Developing a better understanding for light,color, perception and lighting situations.
3 Recommended prerequisite for participationLighting Technology I
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Duration: 30 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc Wi-ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 ReferencesExcercisebook: laboratory: lighting technology II
Courses
Course Nr. Course name18-kh-2020-vl Advanced Lighting Technology
Instructor Type SWSProf. Dr.-Ing. Khanh Quoc Tran Lecture 2
Course Nr. Course name18-kh-2020-pr Advanced Lighting Technology
Instructor Type SWSProf. Dr.-Ing. Khanh Quoc Tran Internship 2
3.1 ADP / Seminars 55
Module nameMicroprocessor Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ho-2040 4 CP 120 h 75 h 1 SoSe
Language Module ownerEnglish Prof. Dr.-Ing. Klaus Hofmann
1 ContentMicroprocessor Architectures, DSP Architectures and Hardware related Programming
2 Learning objectives / Learning OutcomesA student is, after successful completion of this module, able to
• gain the overview on the fundamentals of computer architecture and the different processor classes(RISC, CISC, Mikrocontroller, CPU, DSP),
• understand the central building blocks of a CPU• understand the major properties of the required semiconductor memories, I/O blocks and data busses
(USB, PCI, RS232),• understand the most commonly used Interrupt- and Trap-handling algorithms,• know the common software development methodologies for microcontrollers (assembler, pseudoop-
erations, makros, subprograms and subroutines),• understand the most important fundamentals of hardware oriented programming using C.
3 Recommended prerequisite for participationBasics of Computer Architectures
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 90 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc Wi-ETiT, MSc iCE, MSc iST, MSc MEC, MSc EPE
7 Grade bonus compliant to §25 (2)
8 ReferencesSlide Copies
Courses
Course Nr. Course name18-ho-2040-vl Microprocessor Systems
Instructor Type SWSDr.-Ing. Matthias Rychetsky Lecture 2
Course Nr. Course name18-ho-2040-ue Microprocessor Systems
Instructor Type SWSDr.-Ing. Matthias Rychetsky Practice 1
3.1 ADP / Seminars 56
Module nameNew Technologies of Electrical Energy Converters and Actuators
Module Nr. Credit Points Workload Self study Duration Cycle offered18-bi-2040 4 CP 120 h 75 h 1 SoSe
Language Module ownerGerman and English Prof. Dr. techn. Dr.h.c. Andreas Binder
1 ContentGoal: The application of new technologies, i.e. super conduction, magnetic levitation techniques andmagneto-hydrodynamic converter principles, are introduced to the students. The physical operation modein principle, implemented prototypes and the current state of the development are described in detail.Content:Application of the superconductors for electrical energy converters:
• rotating electrical machines (motors and generators),• solenoid coils for the fusion research,• locomotive- and railway transformers,• magnetic bearings.
Active magnetic bearings (“magnetic levitation”):• basics of the magnetic levitation technique,• magnetic bearings for high speed drives in kW to MW range,• application for high-speed trains with linear drives.
Magneto-hydrodynamic energy conversion:• physical principle,• state of the art and perspectives.
Fusion research:• magnetic field arrangements for contactless plasma inclusion,• state of the current research.
2 Learning objectives / Learning OutcomesBasic knowledge in application of superconductivity in energy systems is understood as well as magneticlevitation, magnetohydrodynamics and fusion technology.
3 Recommended prerequisite for participationPhysics, Electrical Machines and Drives, Electrical Power Engineering
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc EPE, MSc ETiT, MSc MEC, MSc WI-ETiT
7 Grade bonus compliant to §25 (2)
8 ReferencesDetailed textbook; Komarek, P.: Hochstromanwendungen der Supraleitung, Teubner, Stuttgart, 1995Buckel, W.: Supraleitung, VHS-Wiley, Weinheim, 1994Schweitzer, G.; Traxler, A.; Bleuler, H.: Magnetlager, Springer, Berlin, 1993Schmidt, E.: Unkonventionelle Energiewandler, Elitera, 1975
3.1 ADP / Seminars 57
Courses
Course Nr. Course name18-bi-2040-vl New Technologies of Electrical Energy Converters and Actuators
Instructor Type SWSProf. Dr. techn. Dr.h.c. Andreas Binder Lecture 2
Course Nr. Course name18-bi-2040-ue New Technologies of Electrical Energy Converters and Actuators
Instructor Type SWSProf. Dr. techn. Dr.h.c. Andreas Binder Practice 1
3.1 ADP / Seminars 58
Module nameComputer Systems II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-hb-2030 6 CP 180 h 120 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Christian Hochberger
1 Content• Configurable Technologies• FPGA architectures and properties• System-On-Chip, HW components, SW toolchain, support SW• Coarse grained reconfigurable architectures, PE architecture, Modulo schedu-ling
2 Learning objectives / Learning OutcomesAfter completion of the module, students know reconfigurable technologies as well as chip architecturethat employ them (e.g. FPGAs and CGRAs). They can select an ap-propriate technology for a given specificapplication. They know the components a system-on-chip (SoC) consists of. Students can configure andprogram an application specific SoC. They can map simple applications to a CGRA and know the limitationsand pitfalls of this mapping.
3 Recommended prerequisite for participationThorough basic knowledge of digital circuits and computer achitecture. as can be ob-tained in the lec-tures “Logischer Entwurf” and “Rechnersysteme I”. Additionally, stu-dents should be able to write simpleprograms in the programming language C.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Duration: 30 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc iST, MSc iCE, MSc Wi-ETiT
7 Grade bonus compliant to §25 (2)
8 ReferencesThe slides (in German) of the lecture can be obtained through moodle.
Courses
Course Nr. Course name18-hb-2030-vl Computer Systems II
Instructor Type SWSProf. Dr.-Ing. Christian Hochberger, M.Sc. Ramon Wirsch Lecture 3
Course Nr. Course name18-hb-2030-ue Computer Systems II
Instructor Type SWSProf. Dr.-Ing. Christian Hochberger, M.Sc. Ramon Wirsch Practice 1
3.1 ADP / Seminars 59
Module nameLaboratory Control Engineering II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-2060 5 CP 150 h 90 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 ContentDuring the laboratory course the following experiments will be conducted: Coupling control of a helicopter,Non-linear control of a gyroscope, Nonlinear multivariable control of an aircraft, Servo control systems,Control of an overhead crane system, Programmable logic control of a stirring process
2 Learning objectives / Learning OutcomesAfter attending this laboratory course, a student is capable of:
• recalling the basics of the conducted experiments,• organize and comprehend background information for experiments,• assemble experimental set-ups based on manuals,• judge the relevance of experimental results by comparing them with theoretically predicted out-
comes,• present the results of the experiments
3 Recommended prerequisite for participationSystem Dynamics and Control Systems II, the attendance of the additional lecture “System Dynamics andControl Systems III” is recommended
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Written Examination, Duration: 180 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Written Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc iST, MSc Wi-ETiT, Biotechnik
7 Grade bonus compliant to §25 (2)
8 ReferencesAdamy: Instruction manuals for the experiments (available during the kick-off meeting)
Courses
Course Nr. Course name18-ad-2060-pr Laboratory Control Engineering II
Instructor Type SWSProf. Dr.-Ing. Jürgen Adamy, M.Sc. Jan Christian Zimmermann Internship 4
3.1 ADP / Seminars 60
Module nameSoftware Engineering - Introduction
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-1010 6 CP 180 h 120 h 1 WiSe
Language Module ownerGerman Prof. Dr. rer. nat. Andreas Schürr
1 ContentThe lecture gives an introduction to the broad discipline of software engineering. All major topics of thefield - as entitled e.g. by the IEEE’s “Guide to the Software Engi-neering Body of Knowledge” - get addressedin the indicated depth. Main emphasis is laid upon requirements elicitation techniques (software analysis)and the design of soft-ware architectures (software design). UML (2.0) is introduced and used throughoutthe course as the favored modeling language. This requires the attendees to have a sound knowledge of atleast one object-oriented programming language (preferably Java).During the exercises, a running example (embedded software in a technical gadget or device) is utilizedand a team-based elaboration of the tasks is encouraged. Exercises cover tasks like the elicitation of re-quirements, definition of a design and eventually the implementation of executable (proof-of-concept)code.
2 Learning objectives / Learning OutcomesThis lecture aims to introduce basic software engineering techniques - with recourse to a set of best-practiceapproaches from the engineering of software systems - in a practice-oriented style and with the help of onerunning example.After attending the lecture students should be able to uncover, collect and document essential requirementswith respect to a software system in a systematic manner using a model-driven/centric approach. Further-more, at the end of the course a variety of means to acquiring insight into a software system’s design(architecture) should be at the student’s disposal.
3 Recommended prerequisite for participationsound knowledge of an object-oriented programming language (preferably Java)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Duration: 90 min, StandardGrading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written Examination, Weighting: 100 %)
6 Usability of this moduleBSc ETiT, BSc iST, BSc Wi-ETiT
7 Grade bonus compliant to §25 (2)
8 Referenceswww.es.tu-darmstadt.de/lehre/se-i-v/
Courses
Course Nr. Course name18-su-1010-vl Software Engineering - Introduction
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr Lecture 3
Course Nr. Course name18-su-1010-ue Software Engineering - Introduction
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr, M.Sc. Lars Fritsche Practice 1
3.1 ADP / Seminars 61
Module nameSoftware-Engineering - Maintenance and Quality Assurance
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-2010 6 CP 180 h 120 h 1 SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Andreas Schürr
1 ContentThe lecture covers advanced topics in the software engineering field that deal with maintenance and qual-ity assurance of software. Therefore, those areas of the software engineering body of knowledge whichare not addressed by the preceding introductory lecture, are in focus. The main topics of interest are:software maintenance and reengineering, configuration management, static programme analysis and met-rics, dynamic programme analysis and runtime testing as well as programme transformations (refactoring).During the exercises, a suitable Java open source project has been chosen as running example. The partic-ipants analyze, test and restructure the software in teams, each dealing with different subsystems.
2 Learning objectives / Learning OutcomesThe lecture uses a single running example to teach basic software maintenance and quality assuring tech-niques in a practice-oriented style. After attendance of the lecture a student should be familiar with allactivities needed to maintain and evolve a software system of considerable size. Main emphasis is laidon software configuration management and testing activities. Selection and usage of CASE tool as well asworking in teams in conformance with predefined quality criteria play a major role.
3 Recommended prerequisite for participationIntroduction to Computer Science for Engineers as well as basic knowledge of Java
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc iST, MSc Wi-ETiT, Informatik
7 Grade bonus compliant to §25 (2)
8 Referenceswww.es.tu-darmstadt.de/lehre/se_ii/
Courses
Course Nr. Course name18-su-2010-vl Software-Engineering - Maintenance and Quality Assurance
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr, M.Sc. Sebastian Marvin Ruland Lecture 3
Course Nr. Course name18-su-2010-ue Software-Engineering - Maintenance and Quality Assurance
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr, M.Sc. Sebastian Marvin Ruland Practice 1
3.1 ADP / Seminars 62
Module nameOptimization of static and dynamic systems
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0186 10 CP 300 h 210 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Oskar von Stryk
1 Contentoptimization for static systems:- unconstrained and constrained nonlinear optimization, optimality conditions- numerical Newton type and SQP methods- nonlinear least squares- gradient free optimization methods- practical aspects like problem formulation, approximation of derivatives, method specific parameters, as-sessment of a computed solutionoptimization for dynamic systems:- parameter optimization and estimation problems- optimal control problem- maximum principle and optimality conditions- numerical methods for computing optimal trajectories- optimal feedback control- linear quadratic regulatorapplications and case studies from engineering sciences and roboticstheoretical and practical assignments as well as programming tasks for deepening of knowledge andmethodological skills
2 Learning objectives / Learning OutcomesThrough successful participation students acquire fundamental knowledge and methodological skills inconcepts, techniques and computational methods of optimization for static and dynamic systems and theirapplication for optimization problems in engineering sciences.
3 Recommended prerequisite for participationgrundlegende mathematische Kenntnisse und Fähigkeiten in Linearer Algebra, Analysis mehrerer Verän-derlicher und Grundlagen gewöhnlicher Differentialgleichungen
4 Form of examinationModule Eccompanying Examination:
• [20-00-0186-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0186-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikMay be used in other degree programs.
7 Grade bonus compliant to §25 (2)
3.1 ADP / Seminars 63
In dieser Vorlesung findet eine Anrechnung von vorlesungsbegleitenden Leistungen statt, die lt. §25 (2)der 5. Novelle der APB und den vom FB 20 am 30.3.2017 beschlossenen Anrechnungsregeln zu einerNotenverbesserung um bis zu 1.0 führen kann.
8 References- Script of Lecture- J. Nocedal, S.J. Wright: Numerical Optimization, Springer- C.T. Kelley: Iterative Methods for Optimization, SIAM Frontiers in Applied Mathematics- L.M. Rios, N.V. Sahinidis: Derivative-free optimization: a review of algorithms and comparison of softwareimplementations, Journal of Global Optimization (2013) 56:1247-1293- A.E. Bryson, Y.-C. Ho: Applied Optimal Control: Optimization, Estimation and Control, CRC Press- J.T. Betts: Practical Methods for Optimal Control and Estimation Using Nonlinear Programming, SIAMAdvances in Design and Control
Courses
Course Nr. Course name20-00-0186-iv Optimization of static and dynamic systems
Instructor Type SWSIntegratedCourse
6
3.1 ADP / Seminars 64
Module nameArchitecture and Design of Computer Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0012 5 CP 150 h 105 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. phil. nat. Marc Fischlin
1 Content- Technological foundations and trends in micro electronics- Design flows for microelectronic systems- Description of hardware systems- Characteristics of computing systems- Architectural support for parallel execution- Memory systems- Heterogeneous systems-on-chip- On-chip and off-chip communication structures- Embedded systems, including in context of cyber-physical systems
2 Learning objectives / Learning OutcomesAfter successfully attending the course, students are familiar with functional and non-functional require-ments for heterogeneous discrete and integrated computing systems. They understand the techniques forrealizing such systems and can use design methods and tools to apply the techniques to independentlyimplement computing systems (or components thereof) that fulfill the given requirements. They are ableto evaluate computing systems in a number of quality metrics.
3 Recommended prerequisite for participationRecommended:Pass of lecture „Digitaltechnik“ and „Rechnerorganisation“, respectively according knowledge.
4 Form of examinationModule Eccompanying Examination:
• [20-00-0012-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0012-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikB.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikB.Sc. InformationssystemtechnikMay be used in other degree programs.
7 Grade bonus compliant to §25 (2)
8 ReferencesLiterature recommendations will be updated regularly, an example might be:Nikhil/Czeck: Bluespec by ExampleArvind/Nikhil/Emer/Vijayaraghavan: Computer Architecture: A Constructive ApproachHennessy/Patterson: Computer Architecture – A Quantitative ApproachCrockett/Elliott/Enderwitz/Stewart: The Zynq BookFlynn/Luk: Computer System DesignSass/Schmidt: Embedded Systems Design
Courses
3.1 ADP / Seminars 65
Course Nr. Course name20-00-0012-iv Architecture and Design of Computer Systems
Instructor Type SWSIntegratedCourse
3
3.1 ADP / Seminars 66
Module nameImage Processing
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0155 3 CP 90 h 60 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. Bernt Schiele
1 ContentFundamentals of image processing:- Image properties- Image transformations- Simple and complex filtering- Image compression,- Segmentation- Classification
2 Learning objectives / Learning OutcomesAfter successfully completing the course, students have an overview over the mechanisms used in and theabilities of modern image processing techniques. They are able to solve basic to medium level problems inimage processing.
3 Recommended prerequisite for participation
4 Form of examinationModule Eccompanying Examination:
• [20-00-0155-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0155-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikMay be used in other degree programs.
7 Grade bonus compliant to §25 (2)
8 References- Gonzalez, R.C., Woods, R.E., “”Digital Image Processing"", Addison- Wesley Publishing Company, 1992- Haberaecker, P., ""Praxis der Digitalen Bildverarbeitung und Mustererkennung"", Carl Hanser Verlag, 1995- Jaehne, B., ""Digitale Bildverarbeitung"", Springer Verlag, 1997
Courses
Course Nr. Course name20-00-0155-iv Image Processing
Instructor Type SWSIntegratedCourse
2
3.1 ADP / Seminars 67
Module nameComputer Vision I
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0157 6 CP 180 h 120 h 1 Every 2. Sem.
Language Module ownerEnglish Prof. Dr. Bernt Schiele
1 Content- Basics of image formation- Linear and (simple) nonlinear image filtering- Foundations of multi-view geometry- Camera calibration and pose estimation- Foundations of 3D reconstruction- Foundations of motion estimation from video- Template and subspace methods for object recognition- Object classification with bag of words- Object detection- Basics of image segmentation
2 Learning objectives / Learning OutcomesAfter successfully attending the course, students are familiar with the basics of computer vision. Theyunderstand fundamental techniques for the analysis of images and videos, can name their assumptions andmathematical formulations, as well as describe the resulting algorithms. They are able to implement thesetechniques in order to solve basic image analysis tasks on realistic imagery.
3 Recommended prerequisite for participationParticiation of lecture Visual Computing is recommended.
4 Form of examinationModule Eccompanying Examination:
• [20-00-0157-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0157-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikMay be used in other degree programs.
7 Grade bonus compliant to §25 (2)
8 ReferencesLiterature recommendations will be updated regularly, an example might be:- R. Szeliski, “”Computer Vision: Algorithms and Applications"", Springer 2011- D. Forsyth, J. Ponce, ""Computer Vision – A Modern Approach"", Prentice Hall, 2002
Courses
3.1 ADP / Seminars 68
Course Nr. Course name20-00-0157-iv Computer Vision
Instructor Type SWSIntegratedCourse
4
3.1 ADP / Seminars 69
Module nameComputer Vision II
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0401 6 CP 180 h 120 h 1 Every 2. Sem.
Language Module ownerEnglish Prof. Dr. Bernt Schiele
1 Content- Computer vision as (probabilistic) inference- Robust estimation and modeling- Foundations of Bayesian networks and Markov random fields- Basic inference and learning methods in computer vision- Image restoration- Stereo- Optical flow- Bayesian tracking of (articulated) objects- Semantic segmentation- Current research topics
2 Learning objectives / Learning OutcomesAfter successfully attending the course, students have developed a more in-depth understanding of com-puter vision. They formulate image and video analysis tasks as inference problems, taking challenges ofreal applications into account, e.g. regarding robustness. They solve the inference problem using discreteor continuous inference algorithms, and apply these to realistic imagery. They quantitatively evaluate theapplication specific results.
3 Recommended prerequisite for participationParticipation of lecture Visual Computing and Computer Vision I is recommended.
4 Form of examinationModule Eccompanying Examination:
• [20-00-0401-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0401-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikCan be used in other degree programs.
7 Grade bonus compliant to §25 (2)
8 ReferencesLiterature recommendations will be updated regularly, an example might be:- S. Prince, “Computer Vision: Models, Learning, and Inference”, Cambridge University Press, 2012- R. Szeliski, “”Computer Vision: Algorithms and Applications"", Springer 2011
Courses
3.1 ADP / Seminars 70
Course Nr. Course name20-00-0401-iv Computer Vision II
Instructor Type SWSIntegratedCourse
4
3.1 ADP / Seminars 71
Module nameMechatronics Workshop
Module Nr. Credit Points Workload Self study Duration Cycle offered18-bi-1050 2 CP 60 h 45 h 1 WiSe/SoSe
Language Module ownerGerman Prof. Dr. techn. Dr.h.c. Andreas Binder
1 ContentDuring the mechatronic workshop students get the possibility to design and construct their own fixture,which contains a ball track and a ball elevator mechanism. Herefore dimensional plans have to be un-derstood correctly. Afterwards all components (i.e. circuit board, rails and holders) have to be designedand manufactured within the electronic lab and the workshop, where students work independently withturning, drilling and milling machines.The mechatronic workshop allows students to gain practical experience and knowledge in contruction,assembling and PCB layout design.
2 Learning objectives / Learning OutcomesUnderstanding of construction plans, circuit layout design, practical experience with turning, drilling andmilling machines.
3 Recommended prerequisite for participationYou have to bring your own printed copy of the script. This is mandatory for attending the course. Thescript will be published on the moodle platform.
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleBSc/MSc ETiT, BSc/MSc MEC
7 Grade bonus compliant to §25 (2)
8 References• Lecture Notes „Mechatronics Workshop“• J. Dillinger et al.: Fachkunde Metall, Europa-Lehrmittel, 2007• U. Tietze, C. Schenk, E. Gamm: Halbleiter-Schaltungstechnik, Springer, 2012
Courses
Course Nr. Course name18-bi-1050-pr Mechatronics Workshop
Instructor Type SWSProf. Dr. techn. Dr.h.c. Andreas Binder Internship 1
3.1 ADP / Seminars 72
Module nameElectric Railways
Module Nr. Credit Points Workload Self study Duration Cycle offered18-bi-2140 5 CP 150 h 105 h 1 WiSe
Language Module ownerGerman and English Prof. Dr. techn. Dr.h.c. Andreas Binder
1 Content• Mechanics of traction• Electrical part of traction vehicles• Converter and motors for electrical traction• Monitoring systems• Comparison of different power supply systems• DC- and AC- systems for light- and heavy rail• Problems of earthing and earth return currents• Sub stations, converters, power plants
2 Learning objectives / Learning OutcomesComprehension of the basic concepts of electric traction vehicles and power supply for electric railways
3 Recommended prerequisite for participationBasic knowledge in electrical machines and drives
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc Wi-ETiT
7 Grade bonus compliant to §25 (2)
8 ReferencesText book for the lecture. Bendel, H. u.a.: Die elektrische Lokomotive. Transpress, Berlin, 1994. Filipovic,Z: Elektrische Bahnen. Springer, Berlin, Heidelberg, 1995. Steimel, A.: Elektrische Triebfahrzeuge und ihreEnergieversorgung. Oldenburg Industrieverlag, 2006. Bäzold, D. u.a.: Elektrische Lokomotion deutscherEisenbahnen. Alba, Düsseldorf, 1993. Obermayer, H. J.: Internationaler Schnellverkehr. Franckh-Kosmos,Stuttgart, 1994; Guckow, A.; Kiessling, F.; Puschmann, R.: Fahrleitungen el. Bahnen. Teubner, Stuttgart,1997. Schaefer, H.: Elektrotechnische Anlagen für Bahnstrom. Eisenbahn-Fachverlag, Heidelberg, 1981
Courses
Course Nr. Course name18-bi-2140-vl Electric Railways
Instructor Type SWSProf. Harald Neudorfer, Dipl.-Ing. Björn Deusinger, M.Sc. Nicolas Ludwig Erd Lecture 3
3.1 ADP / Seminars 73
Module nameFast Boundary Element Methods for Engineers
Module Nr. Credit Points Workload Self study Duration Cycle offered18-dg-2160 3 CP 90 h 60 h 1 WiSe
Language Module ownerEnglish Prof. Dr.-Ing. Herbert De Gersem
1 ContentHow to solve field problems numerically on the computer? The Boundary Element Method (BEM) hasdeveloped into an important alternative to domain-oriented approaches (like Finite Elements), ever sincefast implementations are available. The BEM reduces the dimensionality of the problem and can easily takeinto account unbounded domains.Starting from the representation formulas of Kirchhoff and Stratton-Chu boundary integral equations arederived. Next, their discretization by collocation and Galerkin methods is discussed.The resulting fully populated matrices have to be compressed for practical applications, by Fast Multipoleor Adaptive Cross Approximation methods.Industrial examples for application of the BEM are considered, for instance acoustic and electromagneticscattering problems, and thermal analysis.Programming homework will be assigned, to deepen the stu-dents’ understanding of the contents.
2 Learning objectives / Learning OutcomesStudents will acquire a detailed understanding of Modeling and Simulation with BEM.
• Derivation: convert certain types of partial differential equations to boundary integral equations• Discretization: obtain boundary element methods from boundary integral equations• Compression: efficiently store and solve the resulting linear systems of equationsApplication: solve
practical field problems in engineering, in the acoustic, electromagnetic and thermal domains
3 Recommended prerequisite for participationBasic knowledge about numerical methods for the solution of partial differential equations (e.g., FiniteElements).Basic knowledge about modelling and simulation in an application domain (e.g., acoustic domain: waveequation; electromagnetic domain: Maxwell’s equations; thermal domain: heat equation).
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Duration: 30 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC, MSc CE
7 Grade bonus compliant to §25 (2)
8 ReferencesO. Steinbach: Numerical Approximation Methods for Elliptic Boundary Value ProblemsS. Rjasanow, O. Steinbach: The Fast Solution of Boundary Integral Equations
Courses
Course Nr. Course name18-dg-2160-vl Fast Boundary Element Methods for Engineers
Instructor Type SWSProf. Dr.-Ing. Stefan Kurz Lecture 2
3.1 ADP / Seminars 74
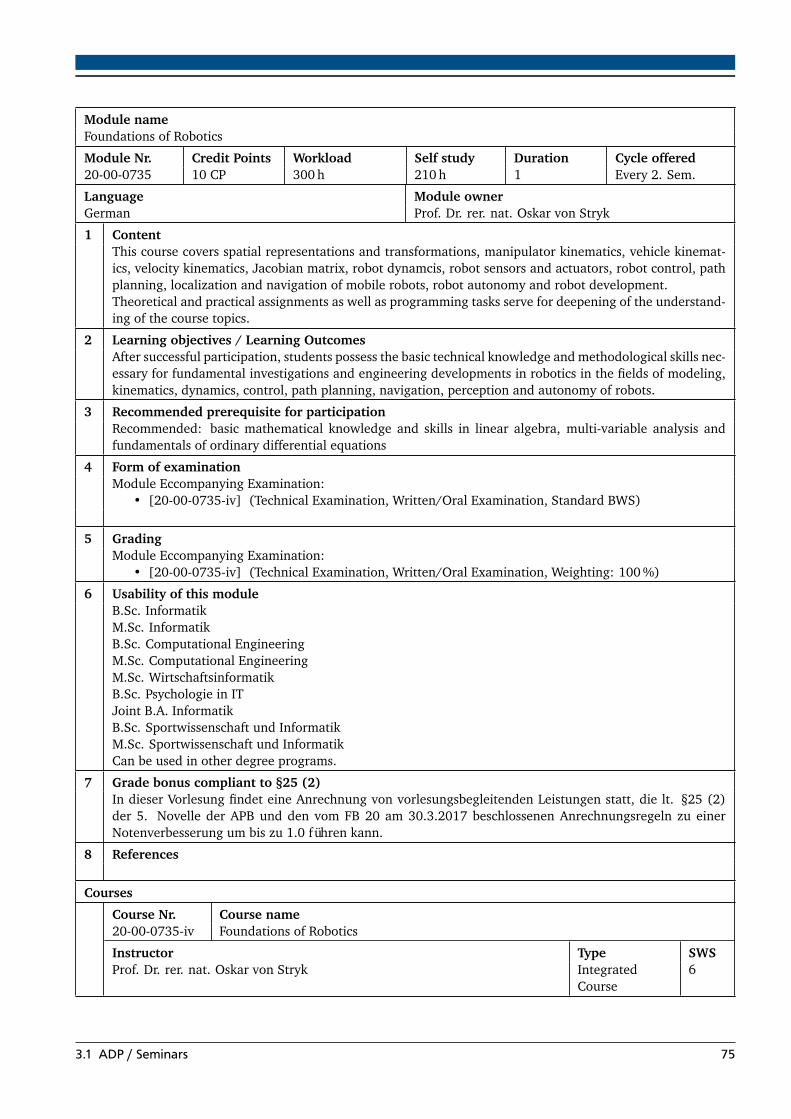
Module nameFoundations of Robotics
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-0735 10 CP 300 h 210 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Oskar von Stryk
1 ContentThis course covers spatial representations and transformations, manipulator kinematics, vehicle kinemat-ics, velocity kinematics, Jacobian matrix, robot dynamcis, robot sensors and actuators, robot control, pathplanning, localization and navigation of mobile robots, robot autonomy and robot development.Theoretical and practical assignments as well as programming tasks serve for deepening of the understand-ing of the course topics.
2 Learning objectives / Learning OutcomesAfter successful participation, students possess the basic technical knowledge and methodological skills nec-essary for fundamental investigations and engineering developments in robotics in the fields of modeling,kinematics, dynamics, control, path planning, navigation, perception and autonomy of robots.
3 Recommended prerequisite for participationRecommended: basic mathematical knowledge and skills in linear algebra, multi-variable analysis andfundamentals of ordinary differential equations
4 Form of examinationModule Eccompanying Examination:
• [20-00-0735-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-0735-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleB.Sc. InformatikM.Sc. InformatikB.Sc. Computational EngineeringM.Sc. Computational EngineeringM.Sc. WirtschaftsinformatikB.Sc. Psychologie in ITJoint B.A. InformatikB.Sc. Sportwissenschaft und InformatikM.Sc. Sportwissenschaft und InformatikCan be used in other degree programs.
7 Grade bonus compliant to §25 (2)In dieser Vorlesung findet eine Anrechnung von vorlesungsbegleitenden Leistungen statt, die lt. §25 (2)der 5. Novelle der APB und den vom FB 20 am 30.3.2017 beschlossenen Anrechnungsregeln zu einerNotenverbesserung um bis zu 1.0 führen kann.
8 References
Courses
Course Nr. Course name20-00-0735-iv Foundations of Robotics
Instructor Type SWSProf. Dr. rer. nat. Oskar von Stryk Integrated
Course6
3.1 ADP / Seminars 75
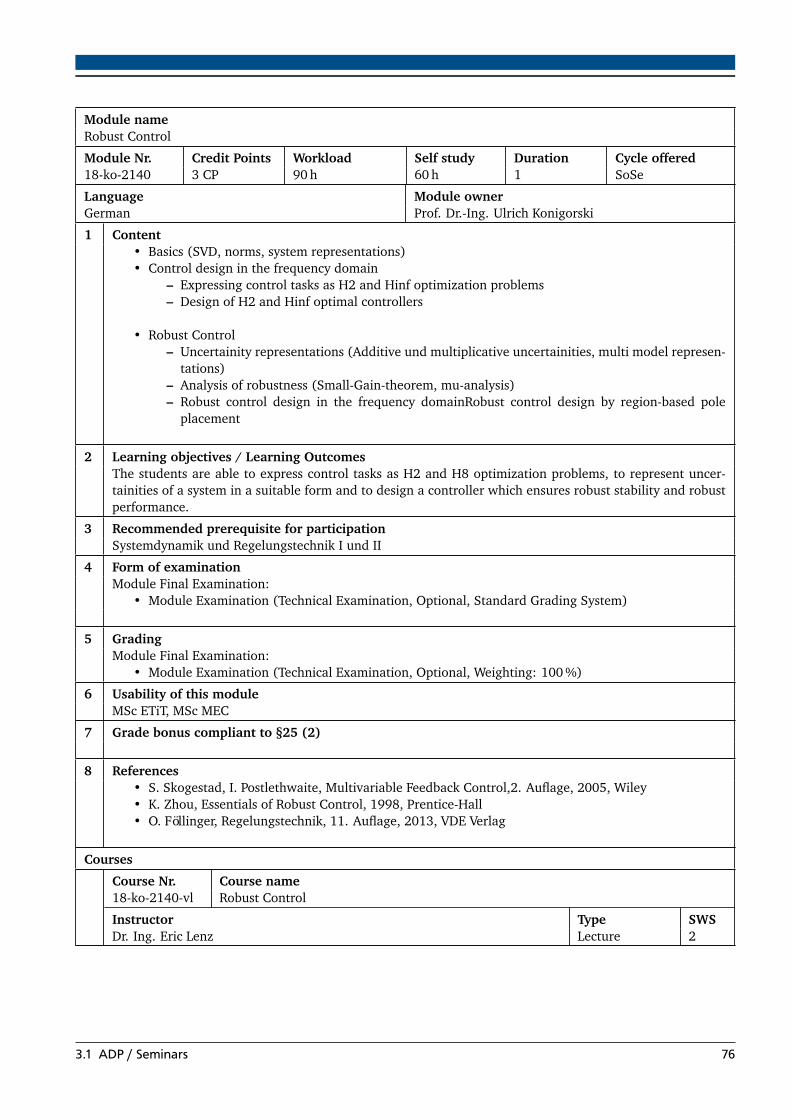
Module nameRobust Control
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ko-2140 3 CP 90 h 60 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Ulrich Konigorski
1 Content• Basics (SVD, norms, system representations)• Control design in the frequency domain
– Expressing control tasks as H2 and Hinf optimization problems– Design of H2 and Hinf optimal controllers
• Robust Control– Uncertainity representations (Additive und multiplicative uncertainities, multi model represen-
tations)– Analysis of robustness (Small-Gain-theorem, mu-analysis)– Robust control design in the frequency domainRobust control design by region-based pole
placement
2 Learning objectives / Learning OutcomesThe students are able to express control tasks as H2 and H8 optimization problems, to represent uncer-tainities of a system in a suitable form and to design a controller which ensures robust stability and robustperformance.
3 Recommended prerequisite for participationSystemdynamik und Regelungstechnik I und II
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleMSc ETiT, MSc MEC
7 Grade bonus compliant to §25 (2)
8 References• S. Skogestad, I. Postlethwaite, Multivariable Feedback Control,2. Auflage, 2005, Wiley• K. Zhou, Essentials of Robust Control, 1998, Prentice-Hall• O. Föllinger, Regelungstechnik, 11. Auflage, 2013, VDE Verlag
Courses
Course Nr. Course name18-ko-2140-vl Robust Control
Instructor Type SWSDr. Ing. Eric Lenz Lecture 2
3.1 ADP / Seminars 76
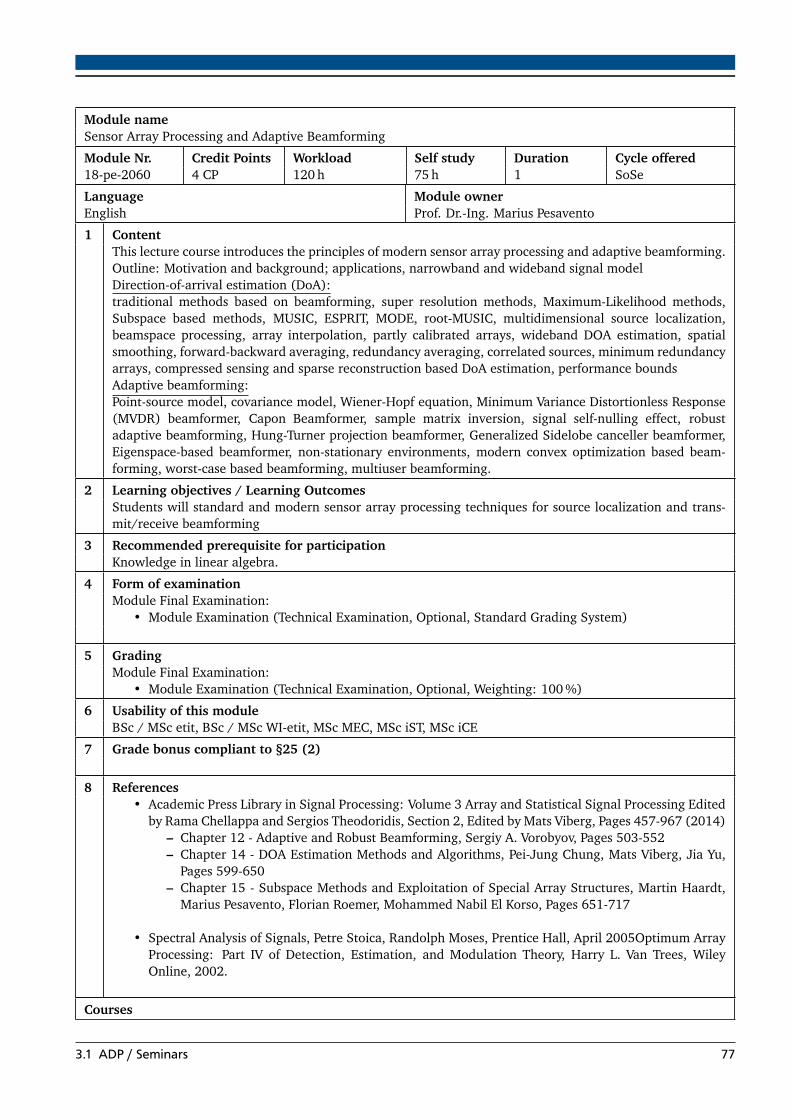
Module nameSensor Array Processing and Adaptive Beamforming
Module Nr. Credit Points Workload Self study Duration Cycle offered18-pe-2060 4 CP 120 h 75 h 1 SoSe
Language Module ownerEnglish Prof. Dr.-Ing. Marius Pesavento
1 ContentThis lecture course introduces the principles of modern sensor array processing and adaptive beamforming.Outline: Motivation and background; applications, narrowband and wideband signal modelDirection-of-arrival estimation (DoA):traditional methods based on beamforming, super resolution methods, Maximum-Likelihood methods,Subspace based methods, MUSIC, ESPRIT, MODE, root-MUSIC, multidimensional source localization,beamspace processing, array interpolation, partly calibrated arrays, wideband DOA estimation, spatialsmoothing, forward-backward averaging, redundancy averaging, correlated sources, minimum redundancyarrays, compressed sensing and sparse reconstruction based DoA estimation, performance boundsAdaptive beamforming:Point-source model, covariance model, Wiener-Hopf equation, Minimum Variance Distortionless Response(MVDR) beamformer, Capon Beamformer, sample matrix inversion, signal self-nulling effect, robustadaptive beamforming, Hung-Turner projection beamformer, Generalized Sidelobe canceller beamformer,Eigenspace-based beamformer, non-stationary environments, modern convex optimization based beam-forming, worst-case based beamforming, multiuser beamforming.
2 Learning objectives / Learning OutcomesStudents will standard and modern sensor array processing techniques for source localization and trans-mit/receive beamforming
3 Recommended prerequisite for participationKnowledge in linear algebra.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this moduleBSc / MSc etit, BSc / MSc WI-etit, MSc MEC, MSc iST, MSc iCE
7 Grade bonus compliant to §25 (2)
8 References• Academic Press Library in Signal Processing: Volume 3 Array and Statistical Signal Processing Edited
by Rama Chellappa and Sergios Theodoridis, Section 2, Edited by Mats Viberg, Pages 457-967 (2014)– Chapter 12 - Adaptive and Robust Beamforming, Sergiy A. Vorobyov, Pages 503-552– Chapter 14 - DOA Estimation Methods and Algorithms, Pei-Jung Chung, Mats Viberg, Jia Yu,
Pages 599-650– Chapter 15 - Subspace Methods and Exploitation of Special Array Structures, Martin Haardt,
Marius Pesavento, Florian Roemer, Mohammed Nabil El Korso, Pages 651-717
• Spectral Analysis of Signals, Petre Stoica, Randolph Moses, Prentice Hall, April 2005Optimum ArrayProcessing: Part IV of Detection, Estimation, and Modulation Theory, Harry L. Van Trees, WileyOnline, 2002.
Courses
3.1 ADP / Seminars 77
Course Nr. Course name18-pe-2060-vl Sensor Array Processing and Adaptive Beamforming
Instructor Type SWSProf. Dr.-Ing. Marius Pesavento Lecture 2
Course Nr. Course name18-pe-2060-ue Sensor Array Processing and Adaptive Beamforming
Instructor Type SWSProf. Dr.-Ing. Marius Pesavento Practice 1
3.1 ADP / Seminars 78
Module nameElectric drives for cars
Module Nr. Credit Points Workload Self study Duration Cycle offered18-bi-2150 4 CP 120 h 75 h 1 WiSe
Language Module ownerEnglish Prof. Dr. techn. Dr.h.c. Andreas Binder
1 ContentThis course introduces the students to the different design aspects of electric drives used in automotiveapplications, comprising both high power density high speed traction and small mass produced auxiliarydrives. Since the target audience comprises students from different degree programmes, the course firstreviews basics of electromagnetic power conversion principles and design principles of PM based machines.The discussion of the electric drives themselves comprises the various facets of their design as part of acomplex system, such as operating requirements, configurations, material choices, parasitic effects andtheir mitigation, electric and thermal stress, as well as manufacturing related questions, notably as theyaffect the design of the mass produced auxiliary drives.
2 Learning objectives / Learning OutcomesAt the end of the course, the students will know about design principles of PM based machines, electricdrives: topologies, operating areas, dynamic performance and configuration of traction drives for hybridcars and electric vehicles as they apply to electric drives for cars. In addition to traction drives, they willalso be familiar with auxiliary drives used in cars. They will understand the parasitic effects of inverterinduced bearing currents, the insulation material used for the electric winding and the winding stress atinverter supply. They will be familiar with the different cooling principles and thermal modelling, as well asthe thermal aspects of the integration into the car. They will also know about the main failure modes thatmay occur with electric drives used for cars, the different lamination sheets used and their manufacturing.
3 Recommended prerequisite for participationCompleted Bachelor of Electrical Engineering or equivalent degree.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name18-bi-2150-vl Electric drives for cars
Instructor Type SWSProf. Dr. Annette Mütze Lecture 2
Course Nr. Course name18-bi-2150-ue Electric drives for cars
Instructor Type SWSProf. Dr. Annette Mütze Practice 1
3.1 ADP / Seminars 79
Module nameMachine Learning and Deep Learning for Automation Systems
Module Nr. Credit Points Workload Self study Duration Cycle offered18-ad-2100 3 CP 90 h 60 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Jürgen Adamy
1 Content• Concepts of machine learning• Linear methods• Support vector machines• Trees and ensembles• Training and assessment• Unsupervised learning• Neural networks and deep learning• Convolutional neuronal networks (CNNs)• CNN applications• Recurrent neural networks (RNNs)
2 Learning objectives / Learning OutcomesStudents will get a broad and practical view on the field of machine learning. First, the most relevantalgorithm classes of supervised and unsupervised learning are discussed. After that, the course addressesdeep neural networks, which enable many of today’s applications in image and signal processing. Thefundamental characteristics of all algorithms are compiled and demonstrated by programming examples.Students will be able to assess the methods and apply them to practical tasks.
3 Recommended prerequisite for participationFundamental knowledge in linear algebra and statisticsPreferred: Lecture “Fuzzy logic, neural networks and evolutionary algorithms”
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Duration: 90 min, Stan-dard Grading System)
The examination takes place in form of a written exam (duration: 90 minutes). If one can estimate thatless than 7 students register, the examination will be an oral examination (duration: 30 min.). The type ofexamination will be announced in the beginning of the lecture.
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 References• T. Hastie et al.: The Elements of Statistical Learning. 2. Aufl., Springer, 2008• I. Goodfellow et al.: Deep Learning. MIT Press, 2016• A. Géron: Hands-On Machine Learning with Scikit-Learn, Keras and TensorFlow. 2. Aufl., O’Reilly,
2019
Courses
3.1 ADP / Seminars 80
Course Nr. Course name18-ad-2100-vl Machine Learning and Deep Learning for Automation Systems
Instructor Type SWSDr.-Ing. Michael Vogt Lecture 2
3.1 ADP / Seminars 81
Module nameMatrix Analysis and Computations
Module Nr. Credit Points Workload Self study Duration Cycle offered18-pe-2070 6 CP 180 h 120 h 1 SoSe
Language Module ownerEnglish Prof. Dr.-Ing. Marius Pesavento
1 ContentThis graduate course is a foundation class on matrix analysis and computations, which are widelyused in many different fields, e.g., machine learning, computer vision, systems and control, signal andimage processing, communications, networks, optimization, and many more. . .Apart from the theory this course will also cover the design of efficient algorithm and it considers manydifferent examples from the aforementioned fields including examples from social media and big dataanalysis, image processing and medical imaging, communication network optimization, and written textclassification.Specific topics: (i) basic matrix concepts, subspace, norms, (ii) linear least squares (iii) eigendecompo-sition, singular value decomposition, positive semidenite matrices, (iv) linear system of equations, LUdecomposition, Cholesky decomposition (v) pseudo-inverse, QR decomposition (vi) advanced tensor de-composition, advanced matrix calculus, compressive sensing, structured matrix factorization
2 Learning objectives / Learning OutcomesStudents will learn matrix analysis and computations at an advanced or research level.
3 Recommended prerequisite for participationBasic knowledge in linear algebra.
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 References1.Gene H. Golub and Charles F. van Loan, Matrix Computations (Fourth Edition), John Hopkins UniversityPress, 2013.2.Roger A. Horn and Charles R. Johnson, Matrix Analysis (Second Edition), Cambridge University Press,2012.3.Jan R. Magnus and Heinz Neudecker, Matrix Differential Calculus with Applications in Statistics andEconometrics (Third Edition), John Wiley and Sons, New York, 2007.4.Giuseppe Calaore and Laurent El Ghaoui, Optimization Models, Cambridge University Press, 2014.ECE 712 Course Notes by Prof. Jim Reilly, McMaster University, Canada (friendly notes for engineers)http://www.ece.mcmaster.ca/faculty/reilly/ece712/course_notes.htm
Courses
Course Nr. Course name18-pe-2070-vl Matrix Analysis and Computations
Instructor Type SWSProf. Dr.-Ing. Marius Pesavento Lecture 3
3.1 ADP / Seminars 82

Course Nr. Course name18-pe-2070-ue Matrix Analysis and Computations
Instructor Type SWSProf. Dr.-Ing. Marius Pesavento Practice 1
3.1 ADP / Seminars 83
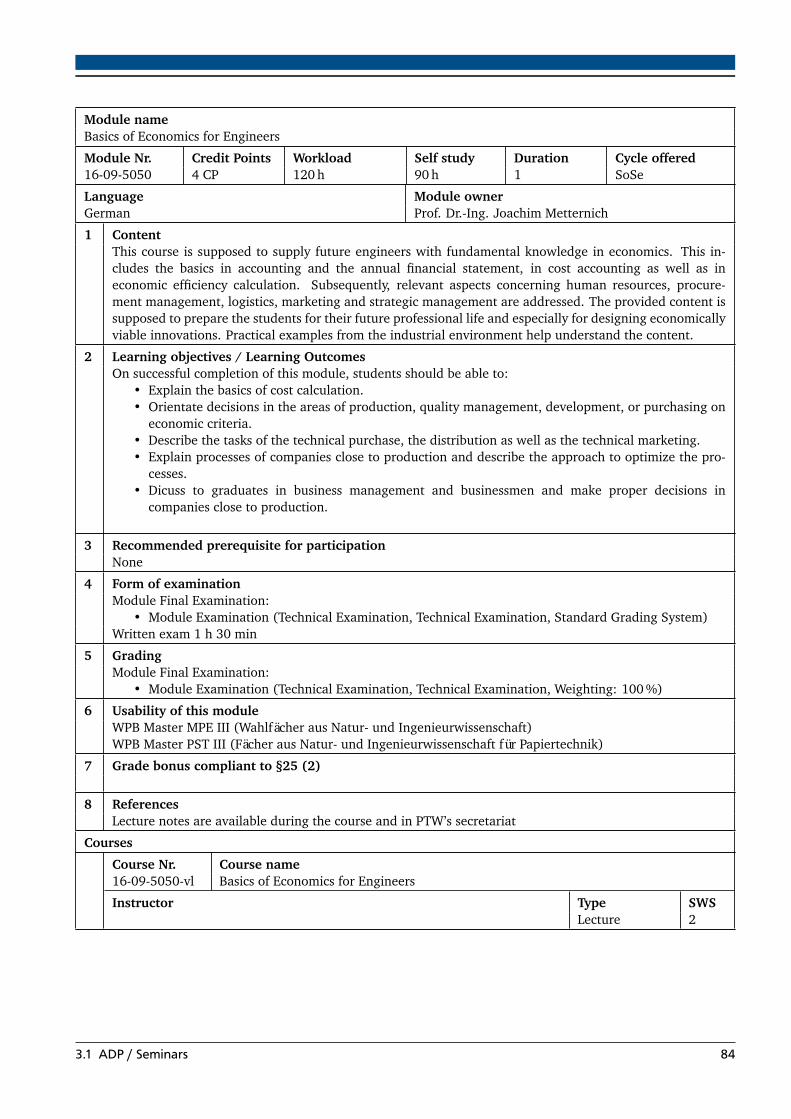
Module nameBasics of Economics for Engineers
Module Nr. Credit Points Workload Self study Duration Cycle offered16-09-5050 4 CP 120 h 90 h 1 SoSe
Language Module ownerGerman Prof. Dr.-Ing. Joachim Metternich
1 ContentThis course is supposed to supply future engineers with fundamental knowledge in economics. This in-cludes the basics in accounting and the annual financial statement, in cost accounting as well as ineconomic efficiency calculation. Subsequently, relevant aspects concerning human resources, procure-ment management, logistics, marketing and strategic management are addressed. The provided content issupposed to prepare the students for their future professional life and especially for designing economicallyviable innovations. Practical examples from the industrial environment help understand the content.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:
• Explain the basics of cost calculation.• Orientate decisions in the areas of production, quality management, development, or purchasing on
economic criteria.• Describe the tasks of the technical purchase, the distribution as well as the technical marketing.• Explain processes of companies close to production and describe the approach to optimize the pro-
cesses.• Dicuss to graduates in business management and businessmen and make proper decisions in
companies close to production.
3 Recommended prerequisite for participationNone
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Standard Grading System)Written exam 1 h 30 min
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Technical Examination, Weighting: 100 %)
6 Usability of this moduleWPB Master MPE III (Wahlfächer aus Natur- und Ingenieurwissenschaft)WPB Master PST III (Fächer aus Natur- und Ingenieurwissenschaft für Papiertechnik)
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture notes are available during the course and in PTW’s secretariat
Courses
Course Nr. Course name16-09-5050-vl Basics of Economics for Engineers
Instructor Type SWSLecture 2
3.1 ADP / Seminars 84
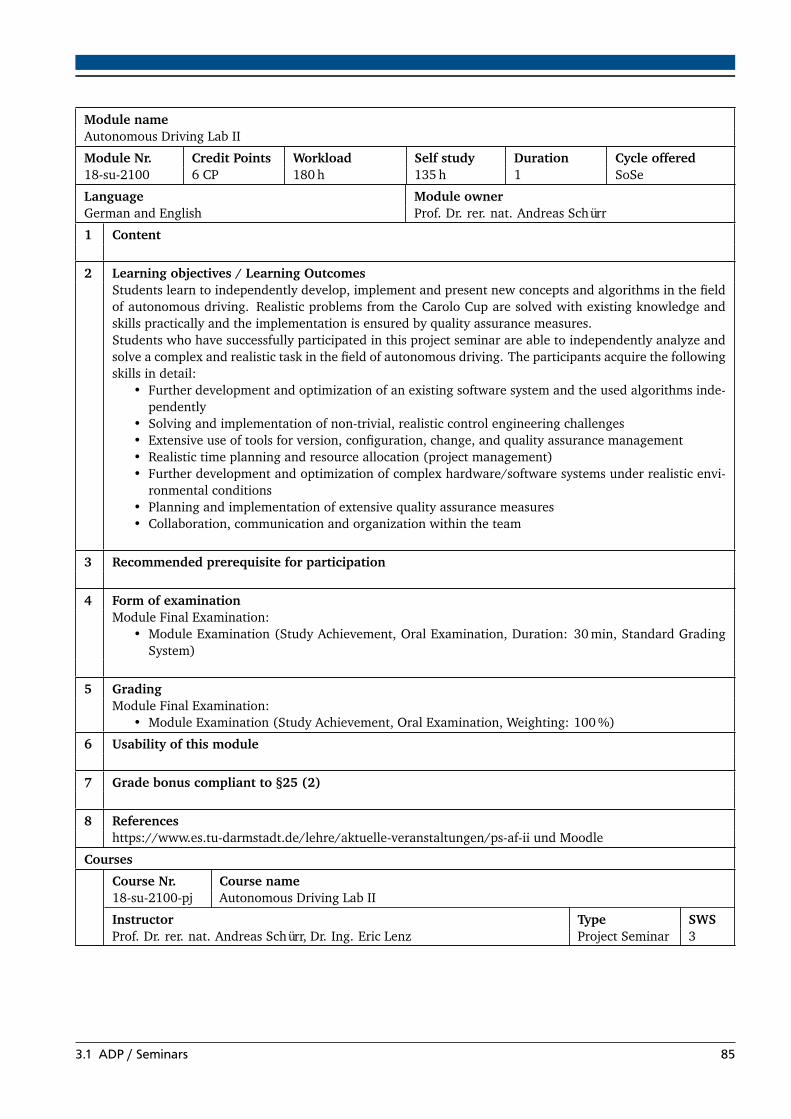
Module nameAutonomous Driving Lab II
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-2100 6 CP 180 h 135 h 1 SoSe
Language Module ownerGerman and English Prof. Dr. rer. nat. Andreas Schürr
1 Content
2 Learning objectives / Learning OutcomesStudents learn to independently develop, implement and present new concepts and algorithms in the fieldof autonomous driving. Realistic problems from the Carolo Cup are solved with existing knowledge andskills practically and the implementation is ensured by quality assurance measures.Students who have successfully participated in this project seminar are able to independently analyze andsolve a complex and realistic task in the field of autonomous driving. The participants acquire the followingskills in detail:
• Further development and optimization of an existing software system and the used algorithms inde-pendently
• Solving and implementation of non-trivial, realistic control engineering challenges• Extensive use of tools for version, configuration, change, and quality assurance management• Realistic time planning and resource allocation (project management)• Further development and optimization of complex hardware/software systems under realistic envi-
ronmental conditions• Planning and implementation of extensive quality assurance measures• Collaboration, communication and organization within the team
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Oral Examination, Duration: 30 min, Standard GradingSystem)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Oral Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 Referenceshttps://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/ps-af-ii und Moodle
Courses
Course Nr. Course name18-su-2100-pj Autonomous Driving Lab II
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr, Dr. Ing. Eric Lenz Project Seminar 3
3.1 ADP / Seminars 85
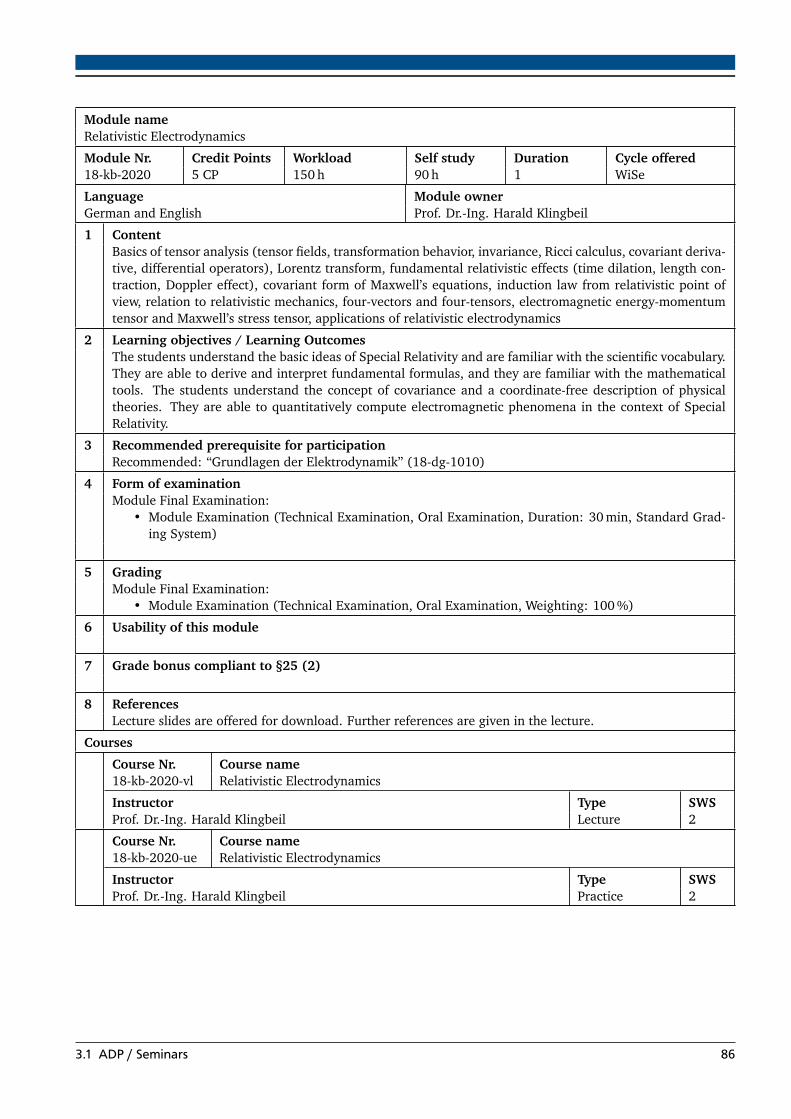
Module nameRelativistic Electrodynamics
Module Nr. Credit Points Workload Self study Duration Cycle offered18-kb-2020 5 CP 150 h 90 h 1 WiSe
Language Module ownerGerman and English Prof. Dr.-Ing. Harald Klingbeil
1 ContentBasics of tensor analysis (tensor fields, transformation behavior, invariance, Ricci calculus, covariant deriva-tive, differential operators), Lorentz transform, fundamental relativistic effects (time dilation, length con-traction, Doppler effect), covariant form of Maxwell’s equations, induction law from relativistic point ofview, relation to relativistic mechanics, four-vectors and four-tensors, electromagnetic energy-momentumtensor and Maxwell’s stress tensor, applications of relativistic electrodynamics
2 Learning objectives / Learning OutcomesThe students understand the basic ideas of Special Relativity and are familiar with the scientific vocabulary.They are able to derive and interpret fundamental formulas, and they are familiar with the mathematicaltools. The students understand the concept of covariance and a coordinate-free description of physicaltheories. They are able to quantitatively compute electromagnetic phenomena in the context of SpecialRelativity.
3 Recommended prerequisite for participationRecommended: “Grundlagen der Elektrodynamik” (18-dg-1010)
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Duration: 30 min, Standard Grad-ing System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Oral Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 ReferencesLecture slides are offered for download. Further references are given in the lecture.
Courses
Course Nr. Course name18-kb-2020-vl Relativistic Electrodynamics
Instructor Type SWSProf. Dr.-Ing. Harald Klingbeil Lecture 2
Course Nr. Course name18-kb-2020-ue Relativistic Electrodynamics
Instructor Type SWSProf. Dr.-Ing. Harald Klingbeil Practice 2
3.1 ADP / Seminars 86
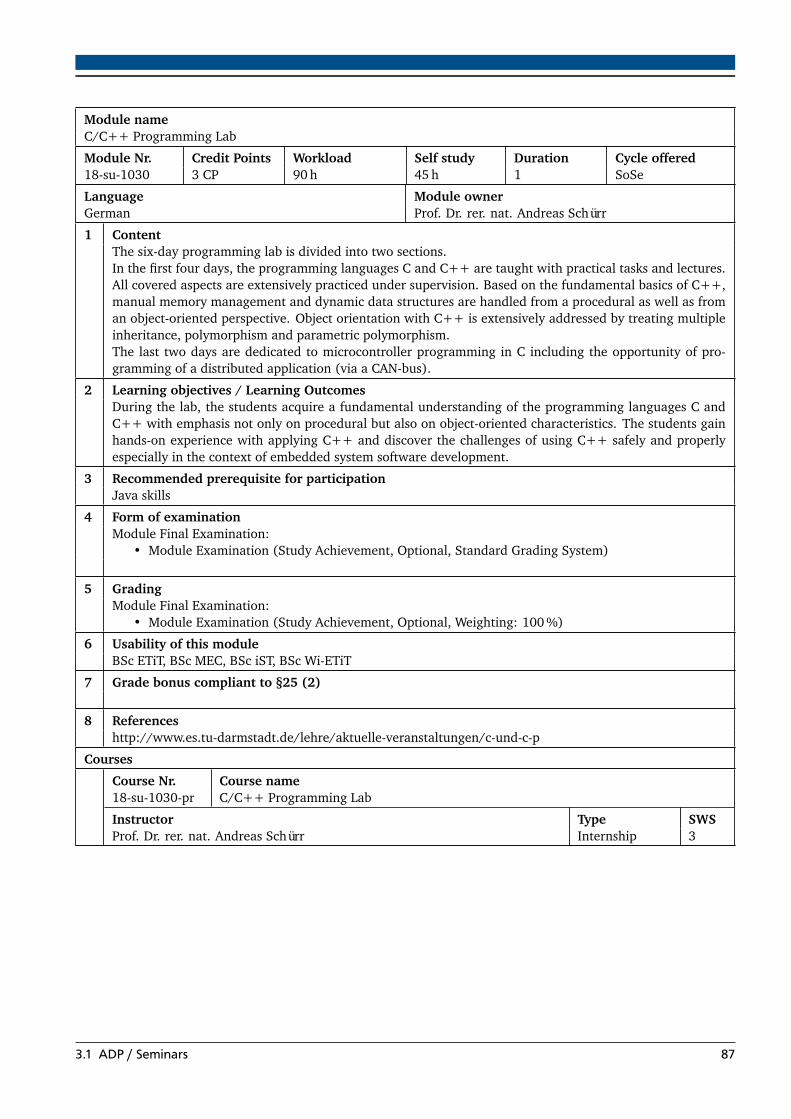
Module nameC/C++ Programming Lab
Module Nr. Credit Points Workload Self study Duration Cycle offered18-su-1030 3 CP 90 h 45 h 1 SoSe
Language Module ownerGerman Prof. Dr. rer. nat. Andreas Schürr
1 ContentThe six-day programming lab is divided into two sections.In the first four days, the programming languages C and C++ are taught with practical tasks and lectures.All covered aspects are extensively practiced under supervision. Based on the fundamental basics of C++,manual memory management and dynamic data structures are handled from a procedural as well as froman object-oriented perspective. Object orientation with C++ is extensively addressed by treating multipleinheritance, polymorphism and parametric polymorphism.The last two days are dedicated to microcontroller programming in C including the opportunity of pro-gramming of a distributed application (via a CAN-bus).
2 Learning objectives / Learning OutcomesDuring the lab, the students acquire a fundamental understanding of the programming languages C andC++ with emphasis not only on procedural but also on object-oriented characteristics. The students gainhands-on experience with applying C++ and discover the challenges of using C++ safely and properlyespecially in the context of embedded system software development.
3 Recommended prerequisite for participationJava skills
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Optional, Weighting: 100 %)
6 Usability of this moduleBSc ETiT, BSc MEC, BSc iST, BSc Wi-ETiT
7 Grade bonus compliant to §25 (2)
8 Referenceshttp://www.es.tu-darmstadt.de/lehre/aktuelle-veranstaltungen/c-und-c-p
Courses
Course Nr. Course name18-su-1030-pr C/C++ Programming Lab
Instructor Type SWSProf. Dr. rer. nat. Andreas Schürr Internship 3
3.1 ADP / Seminars 87
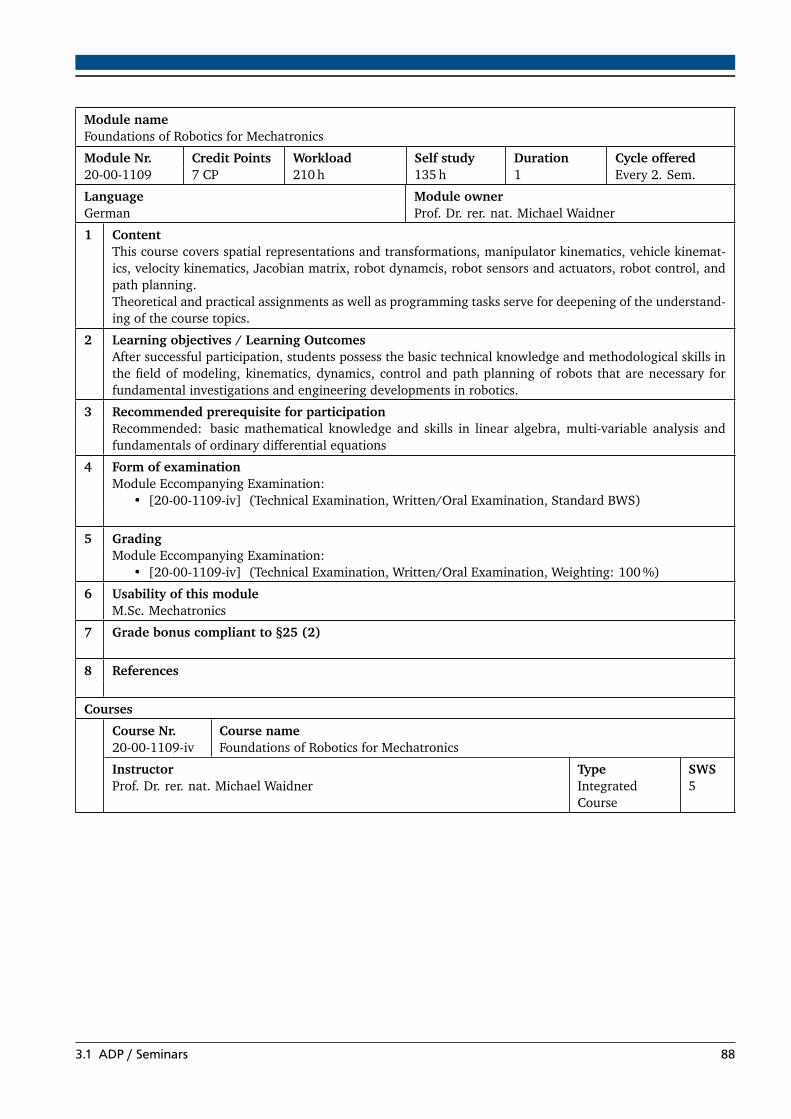
Module nameFoundations of Robotics for Mechatronics
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-1109 7 CP 210 h 135 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Michael Waidner
1 ContentThis course covers spatial representations and transformations, manipulator kinematics, vehicle kinemat-ics, velocity kinematics, Jacobian matrix, robot dynamcis, robot sensors and actuators, robot control, andpath planning.Theoretical and practical assignments as well as programming tasks serve for deepening of the understand-ing of the course topics.
2 Learning objectives / Learning OutcomesAfter successful participation, students possess the basic technical knowledge and methodological skills inthe field of modeling, kinematics, dynamics, control and path planning of robots that are necessary forfundamental investigations and engineering developments in robotics.
3 Recommended prerequisite for participationRecommended: basic mathematical knowledge and skills in linear algebra, multi-variable analysis andfundamentals of ordinary differential equations
4 Form of examinationModule Eccompanying Examination:
• [20-00-1109-iv] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-1109-iv] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleM.Sc. Mechatronics
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name20-00-1109-iv Foundations of Robotics for Mechatronics
Instructor Type SWSProf. Dr. rer. nat. Michael Waidner Integrated
Course5
3.1 ADP / Seminars 88
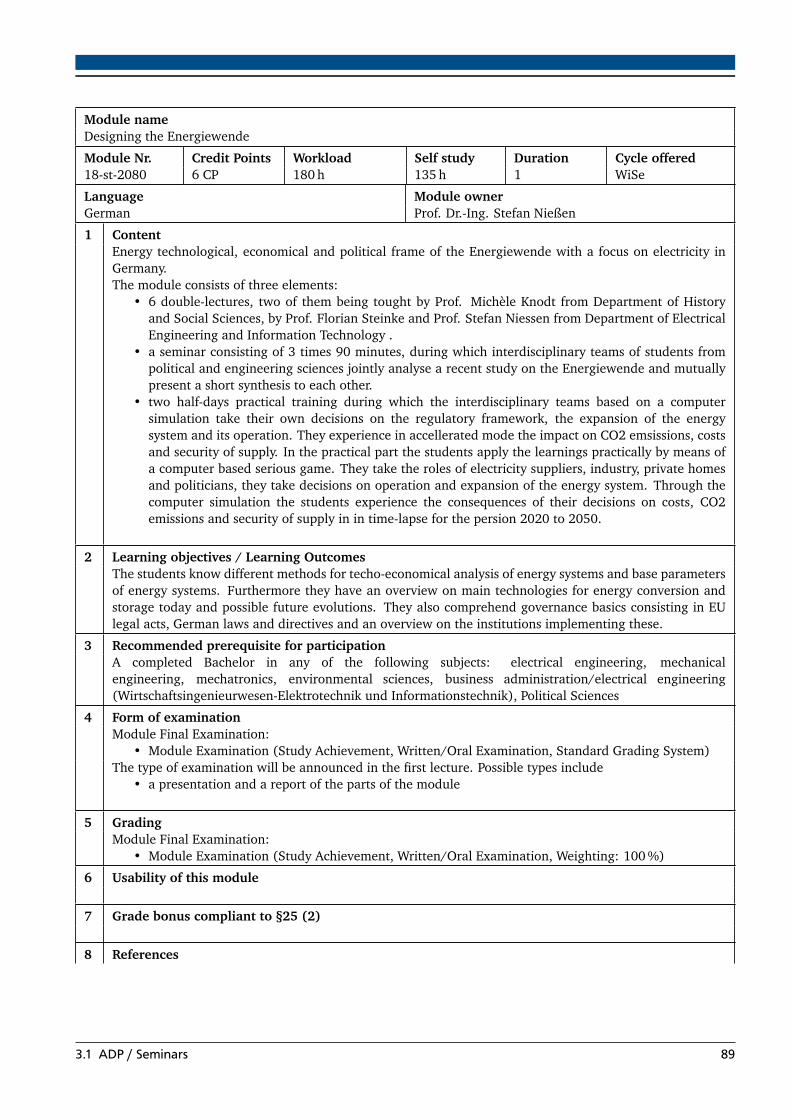
Module nameDesigning the Energiewende
Module Nr. Credit Points Workload Self study Duration Cycle offered18-st-2080 6 CP 180 h 135 h 1 WiSe
Language Module ownerGerman Prof. Dr.-Ing. Stefan Nießen
1 ContentEnergy technological, economical and political frame of the Energiewende with a focus on electricity inGermany.The module consists of three elements:
• 6 double-lectures, two of them being tought by Prof. Michèle Knodt from Department of Historyand Social Sciences, by Prof. Florian Steinke and Prof. Stefan Niessen from Department of ElectricalEngineering and Information Technology .
• a seminar consisting of 3 times 90 minutes, during which interdisciplinary teams of students frompolitical and engineering sciences jointly analyse a recent study on the Energiewende and mutuallypresent a short synthesis to each other.
• two half-days practical training during which the interdisciplinary teams based on a computersimulation take their own decisions on the regulatory framework, the expansion of the energysystem and its operation. They experience in accellerated mode the impact on CO2 emsissions, costsand security of supply. In the practical part the students apply the learnings practically by means ofa computer based serious game. They take the roles of electricity suppliers, industry, private homesand politicians, they take decisions on operation and expansion of the energy system. Through thecomputer simulation the students experience the consequences of their decisions on costs, CO2emissions and security of supply in in time-lapse for the persion 2020 to 2050.
2 Learning objectives / Learning OutcomesThe students know different methods for techo-economical analysis of energy systems and base parametersof energy systems. Furthermore they have an overview on main technologies for energy conversion andstorage today and possible future evolutions. They also comprehend governance basics consisting in EUlegal acts, German laws and directives and an overview on the institutions implementing these.
3 Recommended prerequisite for participationA completed Bachelor in any of the following subjects: electrical engineering, mechanicalengineering, mechatronics, environmental sciences, business administration/electrical engineering(Wirtschaftsingenieurwesen-Elektrotechnik und Informationstechnik), Political Sciences
4 Form of examinationModule Final Examination:
• Module Examination (Study Achievement, Written/Oral Examination, Standard Grading System)The type of examination will be announced in the first lecture. Possible types include
• a presentation and a report of the parts of the module
5 GradingModule Final Examination:
• Module Examination (Study Achievement, Written/Oral Examination, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 References
3.1 ADP / Seminars 89
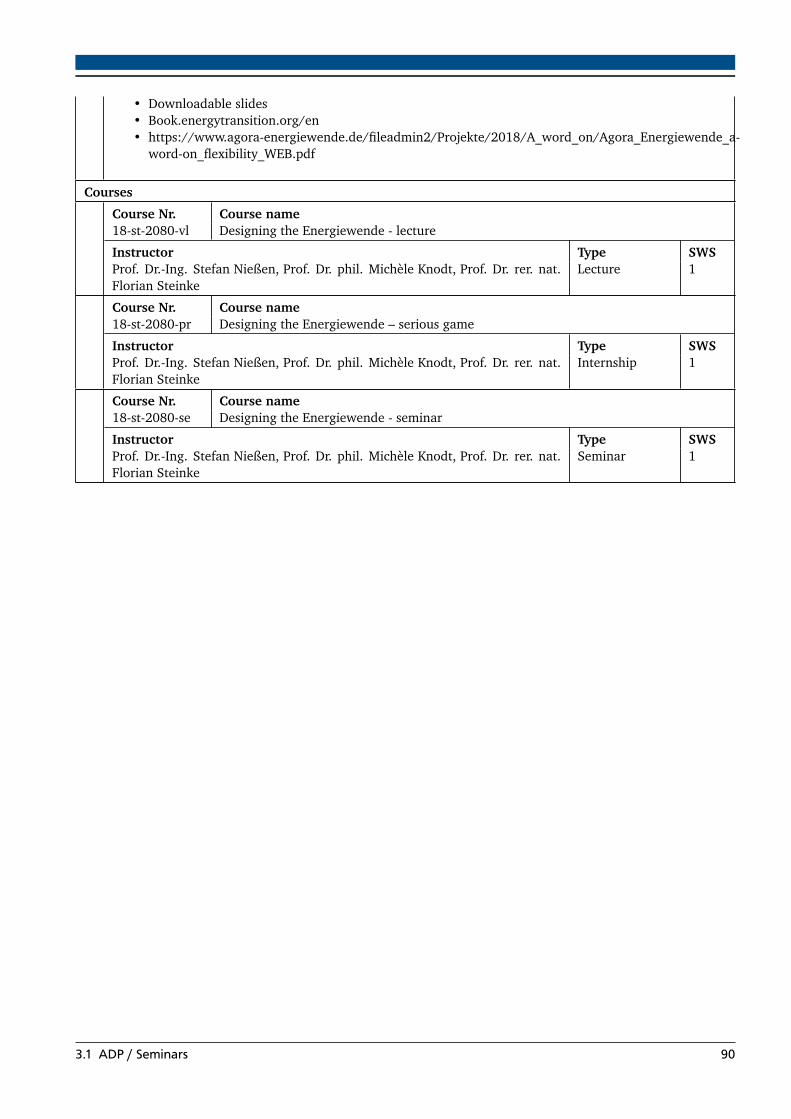
• Downloadable slides• Book.energytransition.org/en• https://www.agora-energiewende.de/fileadmin2/Projekte/2018/A_word_on/Agora_Energiewende_a-
word-on_flexibility_WEB.pdf
Courses
Course Nr. Course name18-st-2080-vl Designing the Energiewende - lecture
Instructor Type SWSProf. Dr.-Ing. Stefan Nießen, Prof. Dr. phil. Michèle Knodt, Prof. Dr. rer. nat.Florian Steinke
Lecture 1
Course Nr. Course name18-st-2080-pr Designing the Energiewende – serious game
Instructor Type SWSProf. Dr.-Ing. Stefan Nießen, Prof. Dr. phil. Michèle Knodt, Prof. Dr. rer. nat.Florian Steinke
Internship 1
Course Nr. Course name18-st-2080-se Designing the Energiewende - seminar
Instructor Type SWSProf. Dr.-Ing. Stefan Nießen, Prof. Dr. phil. Michèle Knodt, Prof. Dr. rer. nat.Florian Steinke
Seminar 1
3.1 ADP / Seminars 90
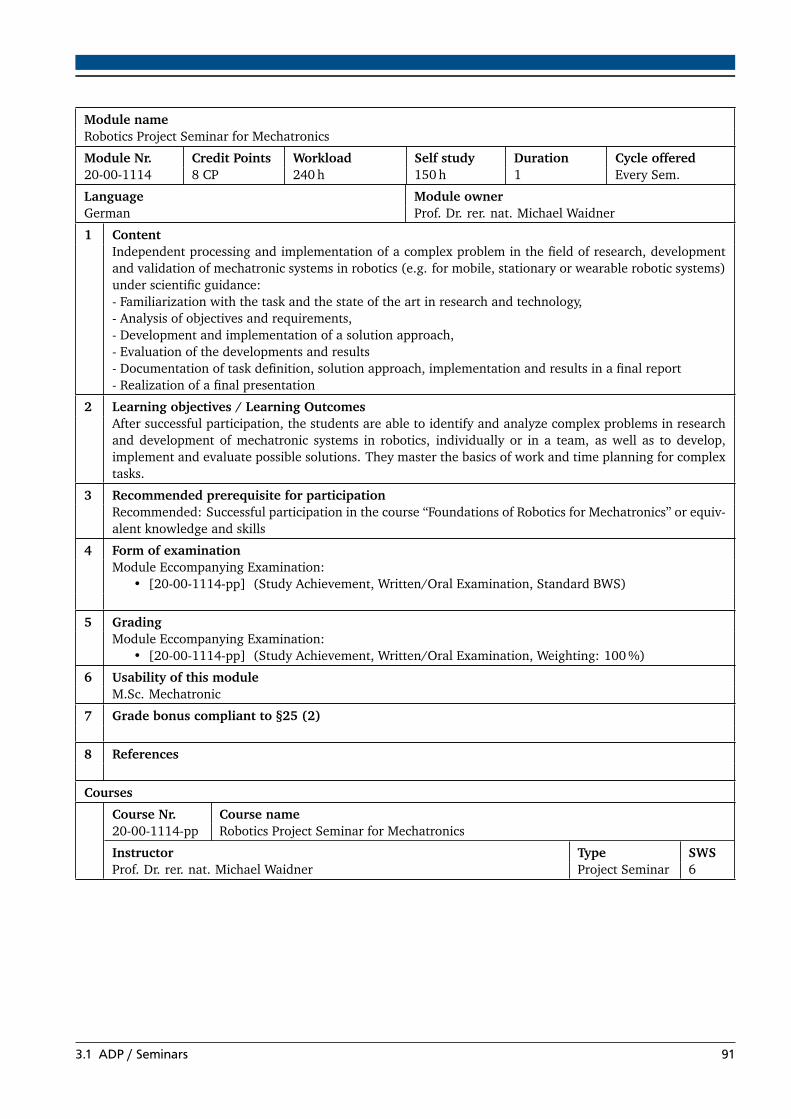
Module nameRobotics Project Seminar for Mechatronics
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-1114 8 CP 240 h 150 h 1 Every Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Michael Waidner
1 ContentIndependent processing and implementation of a complex problem in the field of research, developmentand validation of mechatronic systems in robotics (e.g. for mobile, stationary or wearable robotic systems)under scientific guidance:- Familiarization with the task and the state of the art in research and technology,- Analysis of objectives and requirements,- Development and implementation of a solution approach,- Evaluation of the developments and results- Documentation of task definition, solution approach, implementation and results in a final report- Realization of a final presentation
2 Learning objectives / Learning OutcomesAfter successful participation, the students are able to identify and analyze complex problems in researchand development of mechatronic systems in robotics, individually or in a team, as well as to develop,implement and evaluate possible solutions. They master the basics of work and time planning for complextasks.
3 Recommended prerequisite for participationRecommended: Successful participation in the course “Foundations of Robotics for Mechatronics” or equiv-alent knowledge and skills
4 Form of examinationModule Eccompanying Examination:
• [20-00-1114-pp] (Study Achievement, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-1114-pp] (Study Achievement, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleM.Sc. Mechatronic
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name20-00-1114-pp Robotics Project Seminar for Mechatronics
Instructor Type SWSProf. Dr. rer. nat. Michael Waidner Project Seminar 6
3.1 ADP / Seminars 91
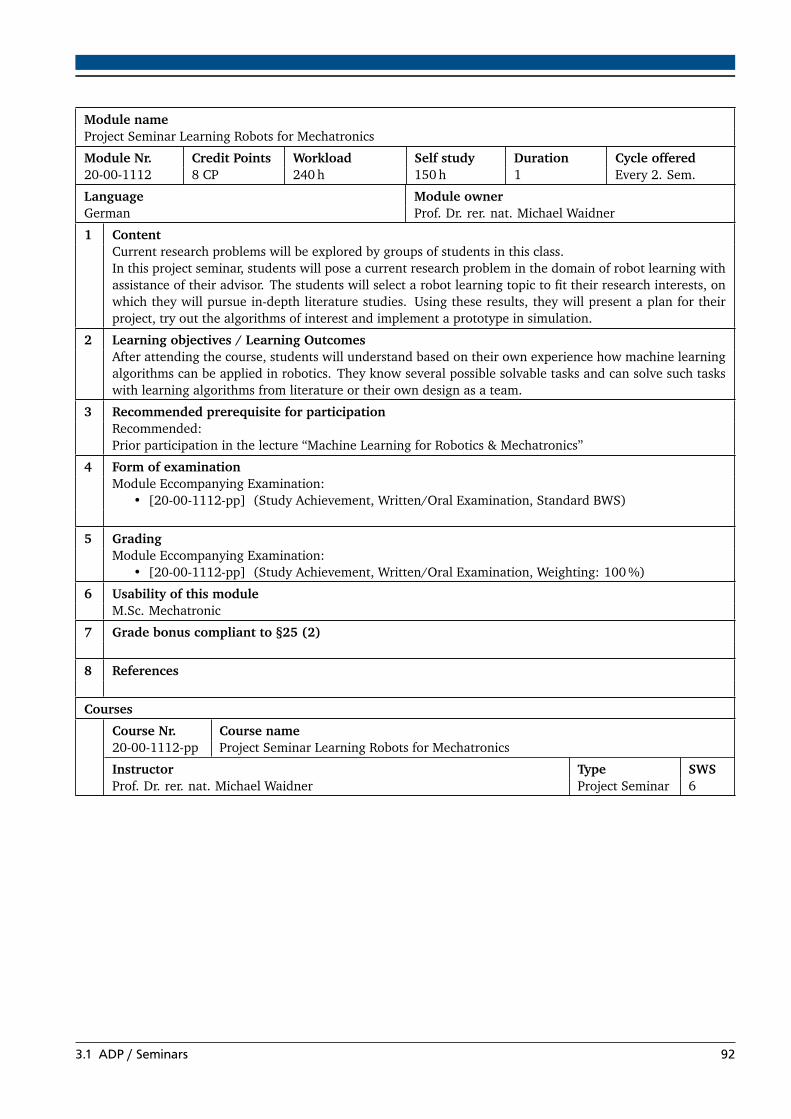
Module nameProject Seminar Learning Robots for Mechatronics
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-1112 8 CP 240 h 150 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Michael Waidner
1 ContentCurrent research problems will be explored by groups of students in this class.In this project seminar, students will pose a current research problem in the domain of robot learning withassistance of their advisor. The students will select a robot learning topic to fit their research interests, onwhich they will pursue in-depth literature studies. Using these results, they will present a plan for theirproject, try out the algorithms of interest and implement a prototype in simulation.
2 Learning objectives / Learning OutcomesAfter attending the course, students will understand based on their own experience how machine learningalgorithms can be applied in robotics. They know several possible solvable tasks and can solve such taskswith learning algorithms from literature or their own design as a team.
3 Recommended prerequisite for participationRecommended:Prior participation in the lecture “Machine Learning for Robotics & Mechatronics”
4 Form of examinationModule Eccompanying Examination:
• [20-00-1112-pp] (Study Achievement, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-1112-pp] (Study Achievement, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleM.Sc. Mechatronic
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name20-00-1112-pp Project Seminar Learning Robots for Mechatronics
Instructor Type SWSProf. Dr. rer. nat. Michael Waidner Project Seminar 6
3.1 ADP / Seminars 92
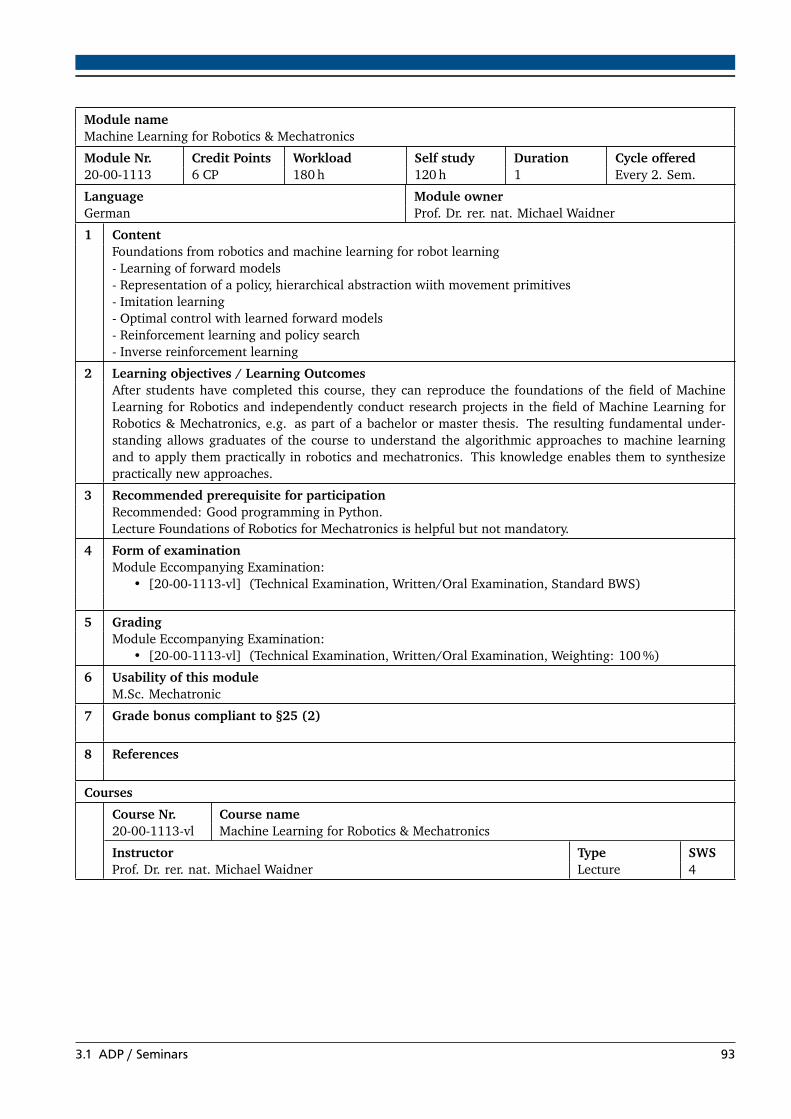
Module nameMachine Learning for Robotics & Mechatronics
Module Nr. Credit Points Workload Self study Duration Cycle offered20-00-1113 6 CP 180 h 120 h 1 Every 2. Sem.
Language Module ownerGerman Prof. Dr. rer. nat. Michael Waidner
1 ContentFoundations from robotics and machine learning for robot learning- Learning of forward models- Representation of a policy, hierarchical abstraction wiith movement primitives- Imitation learning- Optimal control with learned forward models- Reinforcement learning and policy search- Inverse reinforcement learning
2 Learning objectives / Learning OutcomesAfter students have completed this course, they can reproduce the foundations of the field of MachineLearning for Robotics and independently conduct research projects in the field of Machine Learning forRobotics & Mechatronics, e.g. as part of a bachelor or master thesis. The resulting fundamental under-standing allows graduates of the course to understand the algorithmic approaches to machine learningand to apply them practically in robotics and mechatronics. This knowledge enables them to synthesizepractically new approaches.
3 Recommended prerequisite for participationRecommended: Good programming in Python.Lecture Foundations of Robotics for Mechatronics is helpful but not mandatory.
4 Form of examinationModule Eccompanying Examination:
• [20-00-1113-vl] (Technical Examination, Written/Oral Examination, Standard BWS)
5 GradingModule Eccompanying Examination:
• [20-00-1113-vl] (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleM.Sc. Mechatronic
7 Grade bonus compliant to §25 (2)
8 References
Courses
Course Nr. Course name20-00-1113-vl Machine Learning for Robotics & Mechatronics
Instructor Type SWSProf. Dr. rer. nat. Michael Waidner Lecture 4
3.1 ADP / Seminars 93
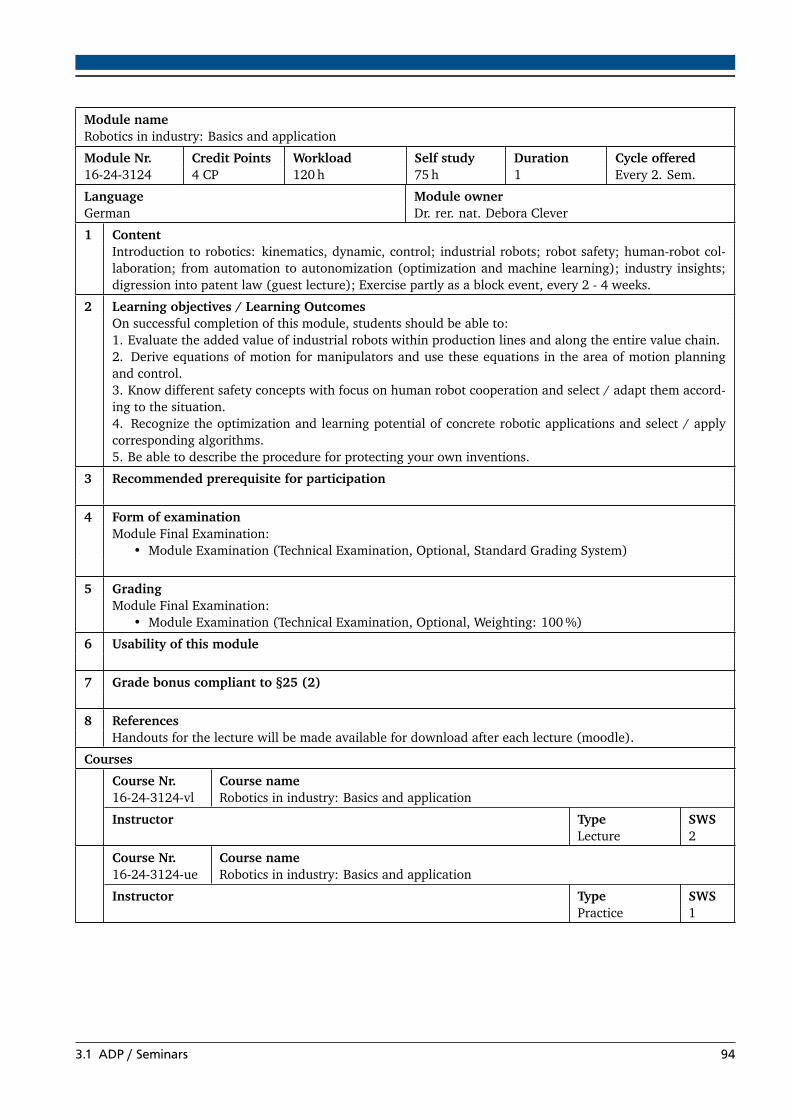
Module nameRobotics in industry: Basics and application
Module Nr. Credit Points Workload Self study Duration Cycle offered16-24-3124 4 CP 120 h 75 h 1 Every 2. Sem.
Language Module ownerGerman Dr. rer. nat. Debora Clever
1 ContentIntroduction to robotics: kinematics, dynamic, control; industrial robots; robot safety; human-robot col-laboration; from automation to autonomization (optimization and machine learning); industry insights;digression into patent law (guest lecture); Exercise partly as a block event, every 2 - 4 weeks.
2 Learning objectives / Learning OutcomesOn successful completion of this module, students should be able to:1. Evaluate the added value of industrial robots within production lines and along the entire value chain.2. Derive equations of motion for manipulators and use these equations in the area of motion planningand control.3. Know different safety concepts with focus on human robot cooperation and select / adapt them accord-ing to the situation.4. Recognize the optimization and learning potential of concrete robotic applications and select / applycorresponding algorithms.5. Be able to describe the procedure for protecting your own inventions.
3 Recommended prerequisite for participation
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Optional, Standard Grading System)
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Optional, Weighting: 100 %)
6 Usability of this module
7 Grade bonus compliant to §25 (2)
8 ReferencesHandouts for the lecture will be made available for download after each lecture (moodle).
Courses
Course Nr. Course name16-24-3124-vl Robotics in industry: Basics and application
Instructor Type SWSLecture 2
Course Nr. Course name16-24-3124-ue Robotics in industry: Basics and application
Instructor Type SWSPractice 1
3.1 ADP / Seminars 94
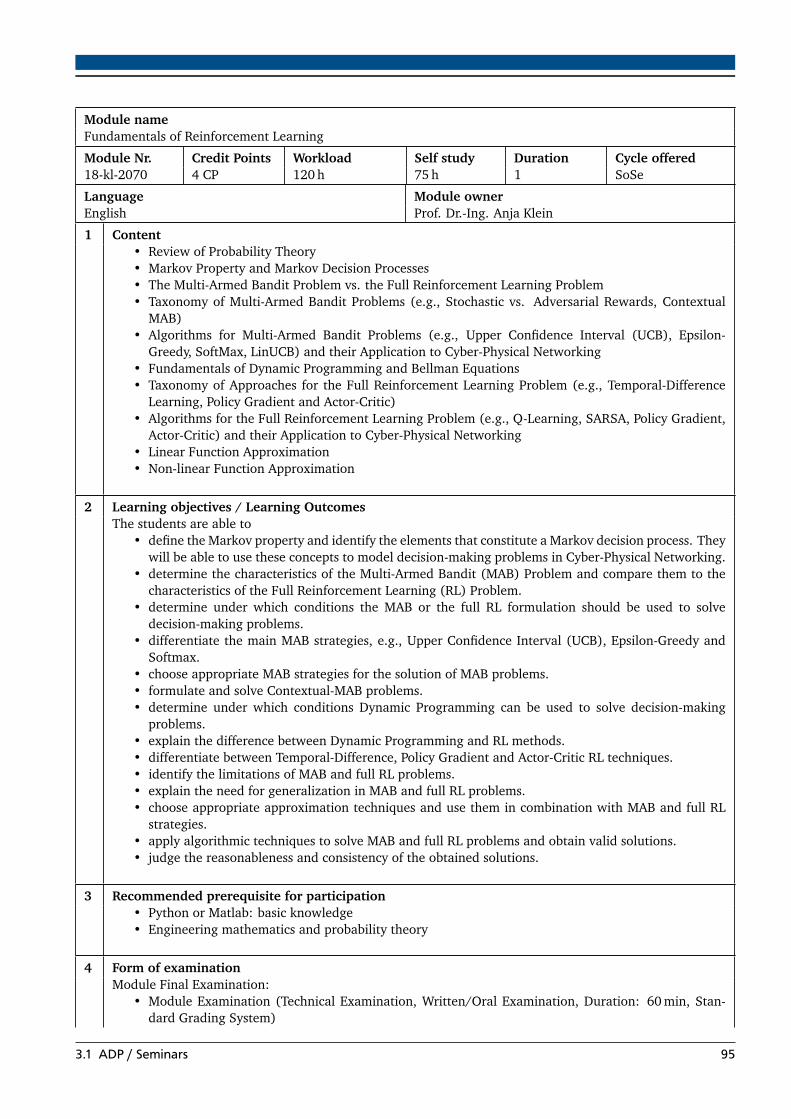
Module nameFundamentals of Reinforcement Learning
Module Nr. Credit Points Workload Self study Duration Cycle offered18-kl-2070 4 CP 120 h 75 h 1 SoSe
Language Module ownerEnglish Prof. Dr.-Ing. Anja Klein
1 Content• Review of Probability Theory• Markov Property and Markov Decision Processes• The Multi-Armed Bandit Problem vs. the Full Reinforcement Learning Problem• Taxonomy of Multi-Armed Bandit Problems (e.g., Stochastic vs. Adversarial Rewards, Contextual
MAB)• Algorithms for Multi-Armed Bandit Problems (e.g., Upper Confidence Interval (UCB), Epsilon-
Greedy, SoftMax, LinUCB) and their Application to Cyber-Physical Networking• Fundamentals of Dynamic Programming and Bellman Equations• Taxonomy of Approaches for the Full Reinforcement Learning Problem (e.g., Temporal-Difference
Learning, Policy Gradient and Actor-Critic)• Algorithms for the Full Reinforcement Learning Problem (e.g., Q-Learning, SARSA, Policy Gradient,
Actor-Critic) and their Application to Cyber-Physical Networking• Linear Function Approximation• Non-linear Function Approximation
2 Learning objectives / Learning OutcomesThe students are able to
• define the Markov property and identify the elements that constitute a Markov decision process. Theywill be able to use these concepts to model decision-making problems in Cyber-Physical Networking.
• determine the characteristics of the Multi-Armed Bandit (MAB) Problem and compare them to thecharacteristics of the Full Reinforcement Learning (RL) Problem.
• determine under which conditions the MAB or the full RL formulation should be used to solvedecision-making problems.
• differentiate the main MAB strategies, e.g., Upper Confidence Interval (UCB), Epsilon-Greedy andSoftmax.
• choose appropriate MAB strategies for the solution of MAB problems.• formulate and solve Contextual-MAB problems.• determine under which conditions Dynamic Programming can be used to solve decision-making
problems.• explain the difference between Dynamic Programming and RL methods.• differentiate between Temporal-Difference, Policy Gradient and Actor-Critic RL techniques.• identify the limitations of MAB and full RL problems.• explain the need for generalization in MAB and full RL problems.• choose appropriate approximation techniques and use them in combination with MAB and full RL
strategies.• apply algorithmic techniques to solve MAB and full RL problems and obtain valid solutions.• judge the reasonableness and consistency of the obtained solutions.
3 Recommended prerequisite for participation• Python or Matlab: basic knowledge• Engineering mathematics and probability theory
4 Form of examinationModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Duration: 60 min, Stan-dard Grading System)
3.1 ADP / Seminars 95
The examination takes place in form of a written exam (duration: 60 minutes). If one can estimate thatless than 21 students register, the examination will be an oral examination (duration: 20 min.). The typeof examination will be announced in the beginning of the lecture.
5 GradingModule Final Examination:
• Module Examination (Technical Examination, Written/Oral Examination, Weighting: 100 %)
6 Usability of this moduleM.Sc. etit: AUT & KTS, M.Sc. ICE, B.Sc. / M.Sc. iST, M.Sc. WI-etit, M.Sc. MEC
7 Grade bonus compliant to §25 (2)
8 References• Richard S. Sutton and Andrew G. Barto, “Reinforcement Learning: An Introduction”, A Bradford
Book, Cambridge, MA, USA, 2018.• Aleksandrs Slivkins, “Introduction to Multi-Armed Bandits”, Foundations and Trends in Machine
Learning, Vol. 12: No. 1-2, 2019.
Courses
Course Nr. Course name18-kl-2070-vl Fundamentals of Reinforcement Learning
Instructor Type SWSDr. rer. nat. Sabrina Klos, Dr.-Ing. Andrea Patricia Ortiz Jimenez Lecture 2
Course Nr. Course name18-kl-2070-ue Fundamentals of Reinforcement Learning
Instructor Type SWSDr. rer. nat. Sabrina Klos, Dr.-Ing. Andrea Patricia Ortiz Jimenez Practice 1
3.1 ADP / Seminars 96





























