Embed Size (px)
DESCRIPTION
M.Tech Embedded systems Syllabus
Citation preview
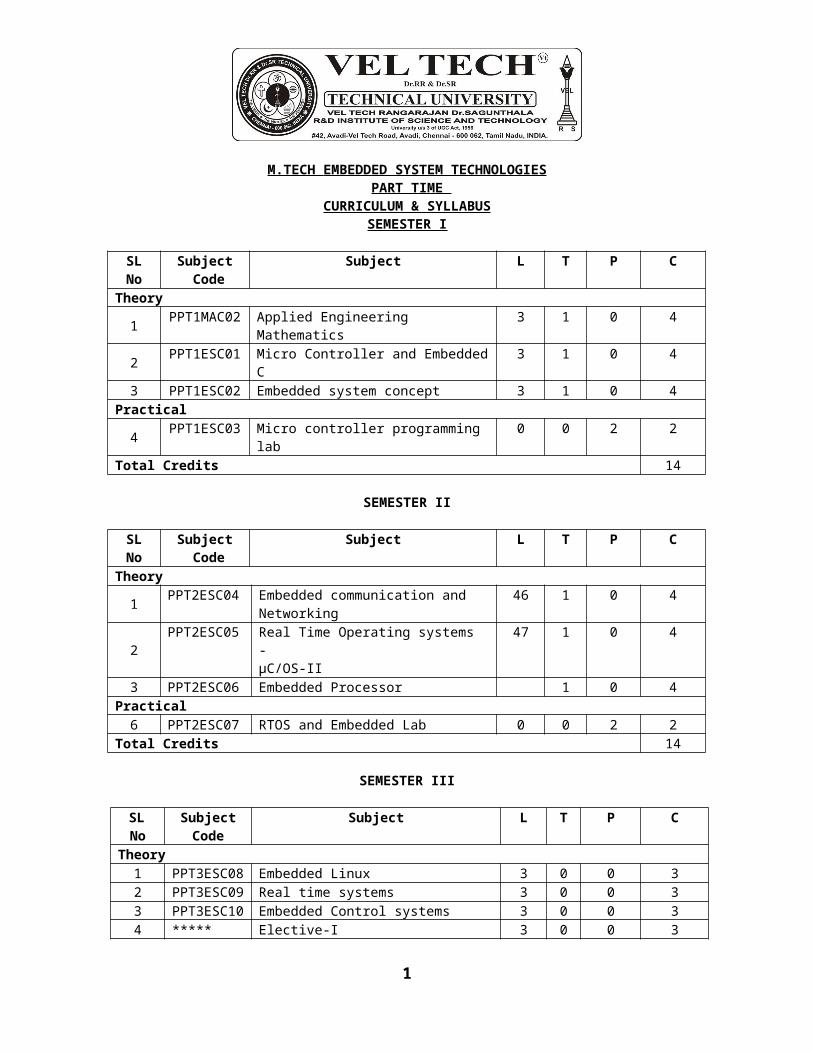
M.TECH EMBEDDED SYSTEM TECHNOLOGIES PART TIME
CURRICULUM & SYLLABUSSEMESTER I
SLNo
Subject Code
Subject L T P C
Theory
1 PPT1MAC02
Applied Engineering Mathematics 3 1 0 4
2 PPT1ESC01
Micro Controller and Embedded C 3 1 0 4
3 PPT1ESC02
Embedded system concept 3 1 0 4
Practical
4 PPT1ESC03
Micro controller programming lab 0 0 2 2
Total Credits 14
SEMESTER II
SLNo
Subject Code
Subject L T P C
Theory
1 PPT2ESC04 Embedded communication and Networking
46 1 0 4
2 PPT2ESC05 Real Time Operating systems - μC/OS-II
47 1 0 4
3 PPT2ESC06 Embedded Processor 1 0 4Practical
6 PPT2ESC07 RTOS and Embedded Lab 0 0 2 2Total Credits 14
SEMESTER III
SLNo
Subject Code
Subject L T P C
Theory
1 PPT3ESC08
Embedded Linux 3 0 0 3
2 PPT3ESC09
Real time systems 3 0 0 3
3 PPT3ESC10
Embedded Control systems 3 0 0 3
4 ***** Elective-I 3 0 0 3Total Credits 12
L – Lecture; T – Tutorial; P – Practical; C – Credit
1
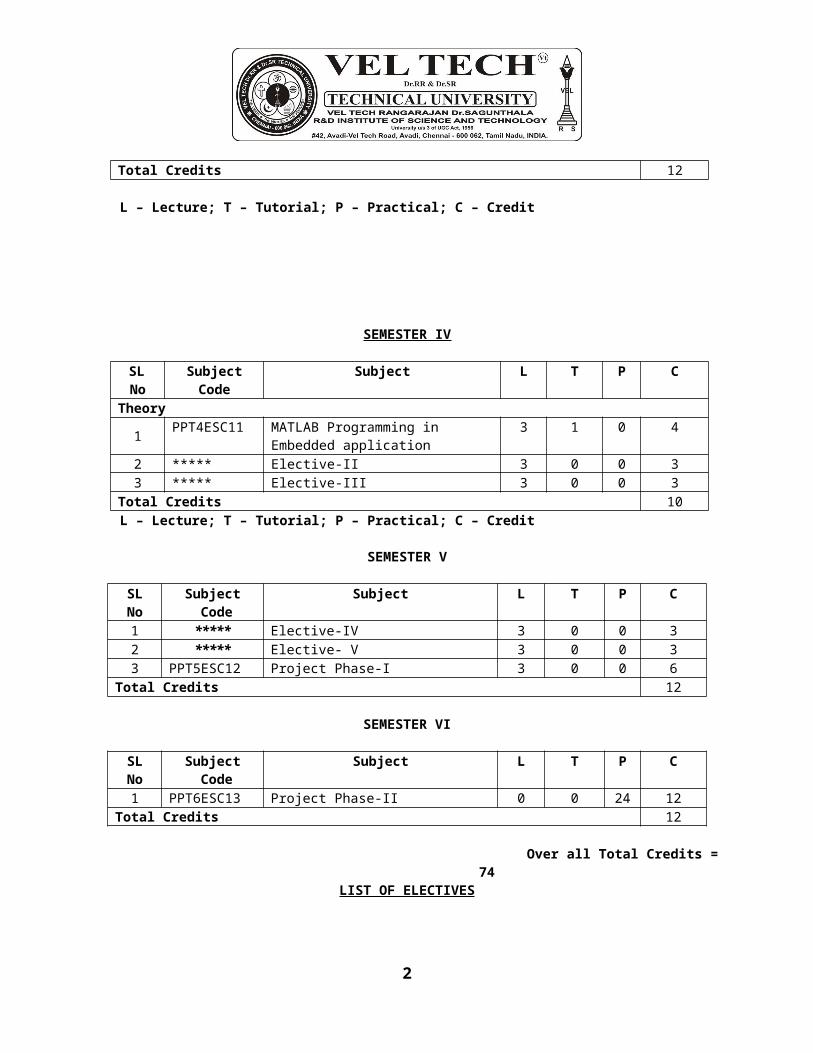
SEMESTER IV
SLNo
Subject Code
Subject L T P C
Theory
1 PPT4ESC11 MATLAB Programming in Embedded application
3 1 0 4
2 ***** Elective-II 3 0 0 33 ***** Elective-III 3 0 0 3
Total Credits 10 L – Lecture; T – Tutorial; P – Practical; C – Credit
SEMESTER V
SLNo
Subject Code
Subject L T P C
1 ***** Elective-IV 3 0 0 32 ***** Elective- V 3 0 0 33 PPT5ESC12 Project Phase-I 3 0 0 6
Total Credits 12
SEMESTER VI
SLNo
Subject Code
Subject L T P C
1 PPT6ESC13 Project Phase-II 0 0 24 12Total Credits 12
2
Over all Total Credits = 74
LIST OF ELECTIVES
SEMESTER I
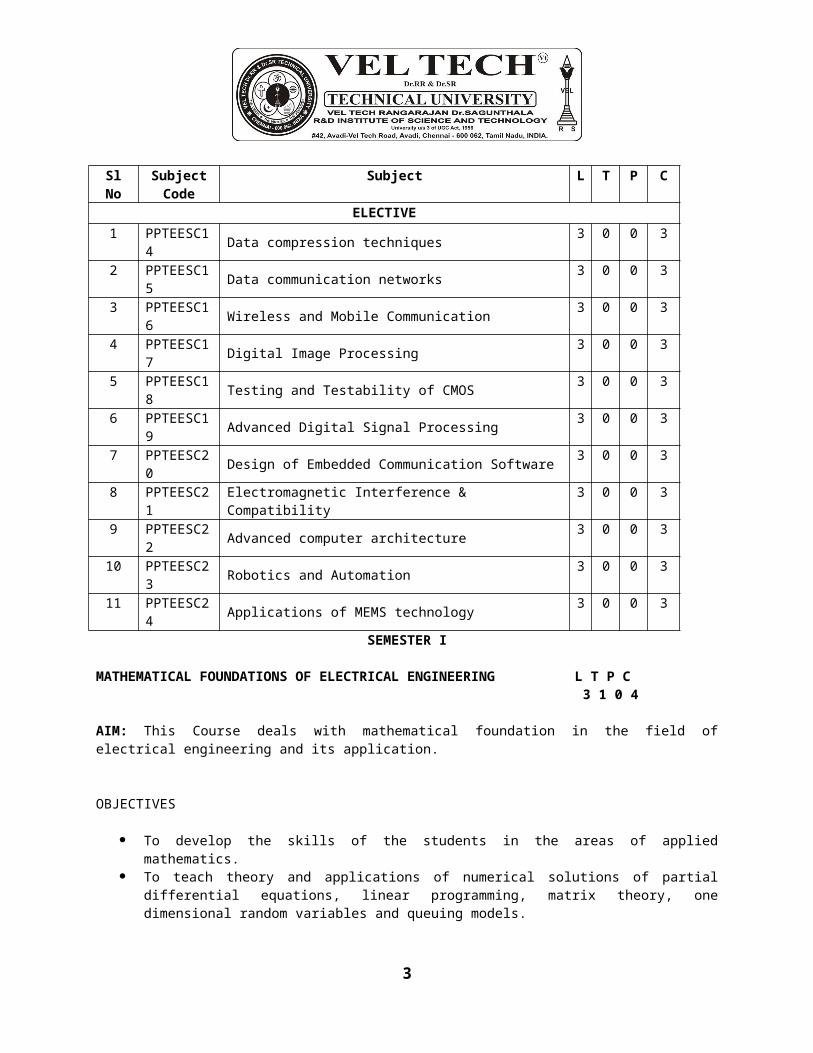
MATHEMATICAL FOUNDATIONS OF ELECTRICAL ENGINEERING L T P C 3 1 0 4
AIM: This Course deals with mathematical foundation in the field of electrical engineering and its application.
OBJECTIVES
To develop the skills of the students in the areas of applied mathematics. To teach theory and applications of numerical solutions of partial differential
equations, linear programming, matrix theory, one dimensional random variables and queuing models.
To teach the fundamental topics required for advanced studies in engineering.
UNIT I APPLIED MATRIX THEORY 9
Eigenvalues and eigenvectors – modal matrix – diagonalization of matrices - finding the dominant and least-dominant Eigen values of a matrix using power method – Sylvester’s theorem – power series of matrices – matrix method for solving systems of differential equations
3
SlNo
Subject Code
Subject L T P C
ELECTIVE
1 PPTEESC14
Data compression techniques 3 0 0 3
2 PPTEESC15
Data communication networks 3 0 0 3
3 PPTEESC16
Wireless and Mobile Communication 3 0 0 3
4 PPTEESC17
Digital Image Processing 3 0 0 3
5 PPTEESC18
Testing and Testability of CMOS 3 0 0 3
6 PPTEESC19
Advanced Digital Signal Processing 3 0 0 3
7 PPTEESC20
Design of Embedded Communication Software 3 0 0 3
8 PPTEESC21
Electromagnetic Interference & Compatibility 3 0 0 3
9 PPTEESC22
Advanced computer architecture 3 0 0 3
10 PPTEESC23
Robotics and Automation 3 0 0 3
11 PPTEESC24
Applications of MEMS technology 3 0 0 3
UNIT II OPERATIONS RESEARCH 9
Linear programming models – graphical method – simplex method – duality theorems – dual simplex method – nonlinear programming with specific reference to quadratic programming – Kuhn-Tucker conditions – introduction to dynamic programming – Bellman’s principle of optimality
UNIT III FOURIER ANALYSIS 9
Continuous and discrete Fourier transforms – definitions, properties and examples of continuous and discrete Fourier transforms – Fast Fourier Transforms (FFT) - application of Discrete Fourier Transforms (DFT) in system design
UNIT IV QUEUING MODELS 9
Basics of queuing models –Poisson queue systems – transient state probability – steady state probabilities – single and multi-server models with finite and infinite capacity – Little’s formula - (M-G-1) queuing model – Jackson networks.
UNIT V RANDOM PROCESSES 9
Review of probability and random variables – random processes – auto-correlation and auto-covariance functions – definition and properties – cross-correlation and cross-covariance functions – definition and properties – stationary processes – power spectrum
TOTAL: 45+15(Tutorial) = 60 periodsREFERENCES
1. H.K. Dass, “Advanced Engineering Mathematics”, S. Chand and Co, New Delhi, 2003
2. Kanti Swarup, P.K. Gupta and Manmohan, “Operations Research”, Sultan Chand, 11 th
edition, New Delhi, 2003.
3. M.K. Venkataraman, “Higher Engineering Mathematics”, National Publishing Co., 4th
edition, 1992.
4. V. Sundarapandian, “Probability, Statistics and Queueing Theory”, PHI Learning Private Limited, New Delhi, 2009.
4
MICRO CONTROLLER AND EMBEDDED C L T P C 3
1 0 4AIM
To give sufficient background for embedded C with microcontroller for system design.OBJECTIVES
To introduce students to the 8051 microcontroller and programming. To introduce Embedded C and its programming with 8051 microcontroller. To introduce the design of multi-state systems and function sequences To introduce the creation of an embedded operating system
UNIT I 8051 ARCHITECTURE AND PROGRAMMING 9Architecture – memory organization –– Timers -Interrupts - I/O ports, Interfacing I/O Devices – Serial Communication- addressing modes – instruction set-Assembly language programming – Timer/Counter Programming – Serial Communication Programming -Interrupt Programming
UNIT II INTRODUCTION TO C WITH 8051 MICROCONTROLLER 9A simple desktop C program -The Super Loop architecture- Controlling the port pins- Creating and using a bit variable- The delay function- Reading switches- Basic techniques for reading port pins- Reading and writing bytes- The need for pull-up resistors- Dealing with switch bounce- program for counting the number of times that a switch is pressed-and released program for Reading switch inputs- program for Counting goats
UNIT III OBJECT-ORIENTED PROGRAMMING IN C 9The Project Header (Main.H)- The device header- Common data types- Interrupts- Meeting real-time constraints- Creating ‘hardware delays’ using Timer 0 and Timer 1- Creating a portable hardware delay- The need for ‘timeout’ mechanisms- Creating loop timeouts- Testing loop timeouts- Creating hardware timeouts- Testing a hardware timeout
UNIT IV CREATING AN EMBEDDED OPERATING SYSTEM 9The basis of a simple embedded OS- The interrupt service routine- Automatic timer reloads- Introducing sEOS - demonstration of sEOS running a dummy task- Tasks, functions and scheduling- Setting the tick interval- Saving power- Using sEOS in projects- Alternative system architectures- Starting tasks- Stopping tasks- design considerations when using sEOS - Worst-case task execution time- The ‘One Interrupt per Microcontroller’ rule- Example Milk pasteurization
UNIT V MULTI-STATE SYSTEMS AND FUNCTION SEQUENCES 9Introduction -Implementing a Multi-State (Timed) system - Example: Traffic light sequencing - Example: Animatronic dinosaur - Implementing a Multi-State (Input/Timed) system - Example: Controller for a washing machine- Case study: Intruder alarm system
TOTAL: 45+15(Tutorial) = 60 periods
TEXT BOOKS
5

1. The 8051 microcontroller using assembly and C by Muhammad Ali Mazidi, Janice Gillispie Mazidi, Rolin D. McKinley Pearson Education, Inc., 2006
2. Embedded C Michael J. Pont Addison-Wesley, 2002
REFERENCE1. Kenneth J Ayala, The 8051 Microcontroller Architecture Programming and Application,
2nd Edition, Penram International Publishers (India), New Delhi, 1996.2. The 8051 Microcontroller Book By Scott Mackenzie.pdf.3. 8051 c programming 3 rd edition Thomas Schultz. 2004
EMBEDDED SYSTEM CONCEPT
AIMTo develop the student’s technical skills by teaching about the embedded processors, design tools and techniques, testing tools and fundamental in a real time operating system used in an embedded system design.
OBJECTIVES To impart the knowledge of processor and microcontrollers used for an embedded
system design. To know about programming tools, design procedures and important issues in design
& testing.
6
L T P C3 1 0 4
To introduce the details of emulators, simulators and IDE tools. To understand the basic concepts in real time operating system and its applications.
UNIT I INTRODUCTION 9Embedded Design life cycle – Product specification – Hardware / Software partitioning, Detailed hardware and software design, Integration, Product testing, Selection Processes – Microprocessor Vs Micro Controller – Performance tools, Bench marking, RTOS Micro Controller – Performance tools, Bench marking, RTOS availability, Tool chain availability, Other issues in selection processes.
UNIT II PARTITIONING 9Partitioning decision – Hardware / Software duality, coding Hardware – ASIC revolution – Managing the Risk, Co-verification, execution environment, memory organization, System startup – Hardware manipulation – memory, mapped access, speed and code density.
UNIT III INTERRUPT SERVICE ROUTINES 9Interrupt Service routines – Watch dog timers – Flash memory Basic toolset – Host and debugging – Remote debugging – ROM emulators, logic Analyzer, Caches – Computer optimization – Statistical profiling - Serial/parallel port interfacing and drivers, DMA & high speed I/O interfacing, Memory selection for embedded systems.
UNIT IV EMULATORS 9In circuit emulators – Bullet proof run control – Real time trace – Hardware break points – Overlay memory – Timing constraints – Usage issues – Triggers.
UNIT V TESTING 9Bug tracking – reduction of risks & costs – Performance – Unit testing – Regression testing – Choosing test cases – Functional tests – Coverage tests – Testing embedded software – Performance testing – Maintenance
TOTAL: 45+15(Tutorial) = 60 periods
7
TEXT BOOK1. Arnold S. Berger, Embedded System Design CMP books, USA 2002
REFERENCE1. Wayne Wolf, Computers as Components: Principles of Embedded Computer Systems
Design, “Morgan Kaufman Publishers, 2004.
MICROCONTROLLER PROGRAMMING LAB L T P C 0 0
2 21. Simple programming
2. Logic operations
8
3. Timer programming
4. Serial port programming
5. Interrupts programming
6. I/O Devices interfacing
7. ADC and DAC interfacing
8. DC Motor control using PWM
9. Elevator interfacing
10. Music tone generator interfacing
9
SEMESTER IIEMBEDDED COMMUNICATION AND NETWORKING L T P C 3 1 0 4
AIM To expose the students to the fundamentals of embedded networking and to give sufficient background for undertaking embedded communication software design.
OBJECTIVESTo impart knowledge on
Serial and parallel communication protocols Application Development using USB and CAN bus for PIC microcontrollers Application development using Embedded Ethernet for Rabbit processors. Wireless sensor network communication protocols.
UNIT I INTRODUCTION TO CAN 9Embedded networking, Controller Area Network, Underlying Technology CAN Overview, Selecting a CAN Controller, Code requirements, Communication requirements, Object directory, Electronic Data Sheets & Device, Configuration files, CAN development tools.
UNIT II CAN OPEN 9CAN open configuration – Evaluating system requirements choosing devices and tools, Configuring single device, Overall network configuration – Network simulation , Network Commissioning, Network management CAN open messages, Advanced features and testing.
UNIT III IMPLEMENTING TO CAN OPEN 9Implementing CAN open Communication layout and requirements, Comparison of implementation methods, Micro CAN open, CAN open source code, Service Data Objects, Process Data Objects, Conformance test, Device profile encoder and Entire design life cycle.
UNIT IV INTRODUCTION TO COMMUNICATION 9OSI Reference Model Communication Devices, Communication Echo System Host Based Communication, Embedded Communication System, Limitation of strict Layering , Layer2 Switch, Layer3 Switch / Routers , Protocol Implementation, Management Types, Debugging Protocols.
UNIT V MULTI BOARD COMMUNICATION SOFTWARE DESIGN 9Multi Board Architecture - Single control Card and Multiple line Card Architecture - Interface for Multi Board software - Failures and Fault - Tolerance in Multi Board Systems - Hardware independent development - Using a COTS Board - Development Environment - Test Tools.
TOTAL: 45+15(Tutorial) = 60 periods
TEXTBOOKS1. Olaf Pfeiffer, Andrew Ayre and Christian Keydel “Embedded Networking with CAN
and CAN open”. Copperhill Technologies Corporation .2. Sridhar .T, "Designing Embedded Communication Software", Elsevier publications, 2003
10
REFERENCES1. Wilfred Voss , “A Comprehensible Guide to Controller Area Network “ , Copperhill Technologies Corporation .
2. Mohammad Farsi , Manul Bernar do Martins Barbosa, “ CAN open implementation : Applications to industrial networks “ , Research Study Press.
REAL TIME OPERATING SYSTEM- μC/OS-II L T P C 3 1 0 4
AIM To understand the concepts of real time operating system μC/OS-II.
OBJECTIVES To get a comprehensive knowledge of the architecture of real time and distributed
systems. To understand the kernel structure of μC/OS-II To understand the Task, time and memory management and Inter task
communication & synchronization of μC/OS-II
11
To understand the Applications of μC/OS-II with ARM7
UNIT I INTRODUCTION 9Real-Time Systems Concepts-Foreground/Background Systems-critical sections-resources- multitasking-context switching- scheduling- reentrancy- task priorities- mutual exclusion- semaphores-inter task communications-interrupts -μC/OS-II features.
UNIT II KERNEL STRUCTURE 9Introduction to μc/OS-II and its internal structure-tasks and task states- task control blocks- ready list implements in μc/OS-II - task scheduling- Locking and Unlocking the Scheduler-the idle task-Statistics Task-CPU usage- interrupts handling in μc/OS-II-Clock Tick -initialize and start μc/OS-II
UNIT III TASK, TIME AND MEMORY MANAGEMENT 9Creating a Task-Stack Checking-Deleting a Task-Changing a Task’s Priority-Suspending a Task-Resuming a Task-Getting Information about a Task-Delaying a task-Resuming a delayed task-System time-Memory Control Blocks-Creating a partition-Obtaining a memory block-Returning a memory block-Obtaining status about memory partition-memory partitions-Waiting for memory blocks from a partition
UNIT IV INTERTASK COMMUNICATION & SYNCHRONIZATION 9Event Control Blocks-Initializing an ECB-Making a task ready-Making a task wait for an event-Semaphores-Creating a Semaphore-Waiting on a Semaphore-Signaling a Semaphore-Getting a Semaphore without waiting-Obtaining the status of a semaphore-Message Mailboxes-Creating a Mailbox-Waiting for a message at a Mailbox-Sending a message to a mailbox-Obtaining the status of a mailbox-Using a mailbox as a binary semaphore-Message Queues-Creating a Queue-Waiting for a message at a Queue-Sending a message to a queue (FIFO and LIFO)- Getting a message without waiting-Flushing a queue-Obtaining the status of a queue- Reading analog inputs by Using message queue-counting semaphore
UNIT V APPLICATIONS WITH ARM7 94*4 Keyboard and 16*2 LCD Display Interfacing -Temperature Control-Memory Management -Message Queue Using -Message Mailbox -Semaphore Signaling -AADC –RTC Interfacing Semaphore Synchronization
TOTAL: 45+15(Tutorial) = 60 periods TEXT BOOK
1. Jean J. Labrosse, "MicroC OS II: The Real Time Kernel, 2 Ed " CMP Books | 2002
REFERENCE1. Raj Kamal, “Embedded Systems- Architecture, Programming and Design” Tata McGraw
Hill, 2006
12
EMBEDDED PROCESSOR L T P C 3 1 0
4AIMTo give sufficient background for undertaking embedded Processors for system design.
OBJECTIVES To introduce students to the PIC microcontroller and programming. To introduce ARM Processor and its programming. To introduce about DSP Processor.
UNIT I PIC MICROCONTROLLER 9Architecture – memory organization – addressing modes – instruction set – PIC programming in Assembly & C –I/O port, Data Conversion, RAM & ROM Allocation.
UNIT II PERIPHERAL OF PIC MICROCONTROLLER 9Timer programming, Timers – Interrupts, I/O ports- I2C bus-A/D converter-UART- CCP modules -ADC, and DAC Interfacing –Flash and EEPROM memories. Introduction to MP-LAB IDE
UNIT III ARM ARCHITECTURE AND PROGRAMMING 9Arcon RISC Machine – Architectural Inheritance – Core & Architectures -Registers –Pipeline - Interrupts – ARM organization - ARM processor family – Co-processors. Instruction set – Thumb instruction set – Instruction cycle timings - The ARM Programmer’s model
UNIT IV ARM SYSTEM DEVELOPMENT AND APPLICATION 9
13
ARM Development tools – ARM Assembly Language Programming and ‘C’ programming. Architectural support for system development- Architectural support for operating system-ARM CPU Cores-advanced communication processor-
UNIT V APPLICATION OF PIC AND ARM PROCESSOR 9APPLICATIONS with PIC Interfacing LCD Display – Keypad Interfacing- Sensor Interfacing- APPLICATIONS with ARM- The VLSI ISDN Subscriber processor-GSM chip-Bluetooth baseband processor-DRACO telecommunication processor
TOTAL: 45+15(Tutorial) = 60 periods
TEXTBOOKS:1. Steve Furber, ‘ARM system on chip architecture’, Addison Wesley2. Muhammad Ali Mazidi, Rolin D. Mckinlay, Danny Causey ‘ PIC Microcontroller and
Embedded Systems using Assembly and C for PIC18’, Pearson Education 20083. B.Venkatramani & M.Bhaskar, "Digital Signal Processors architecture, programming
and applications", TMH, 2002
REFERENCES:1. Trevor Martin, ‘The Insider's Guide To The Philips ARM7-Based Microcontrollers,
An Engineer's Introduction To The LPC2100 Series’ Hitex (UK) Ltd.2. John Iovine, ‘PIC Microcontroller Project Book ’, McGraw Hill 2000
14
REAL TIME OPERATING SYSTEM AND EMBEDDED LAB L T P C
0 0 2 2
List of Experiments:
1. Implement a semaphore for any given task switching on a microcontroller2. Implementation of mutual exclusion in tasks 3. Implementation of event control blocks and its management in tasks4. Implementation of mailbox in tasks 5. Implementation of message queue management in tasks 6. Implementation of memory management in tasks 7. Implementation of temperature controller using RTOS.8. Design with ARM Processors.
i. I/O programming ii. ADC/DAC iii. Timers iv. Interrupts
9. Programming with DSP processors fori. Correlationii. Convolutioniii. Arithmetic adderiv. Multiplierv. Design of Filters-FIR and IIR
10. Design with Programmable Logic Devices using Xilinx/Altera FPGA and CPLD 11. Design and Implementation of simple Combinational/Sequential Circuits 12. Introduction to LAB VIEW
15
SEMESTER III EMBEDDED LINUX L T P C
3 0 0 3
AIM To understand the concepts of embedded Linux operating system.
OBJECTIVES To introduce students to fundamentals of operating systems. To introduce students to introduction to embedded linux. To introduce students to board support package and embedded storage. To introduce students to embedded drivers and application porting.
UNIT I FUNDAMENTALS OF OPERATING SYSTEMS 9 Overview of operating systems – Process and threads – Processes and Programs – Programmer view of processes – OS View of processes – Threads - Scheduling – Non preemptive and preemptive scheduling – Real Time Scheduling – Process Synchronization – Semaphores – Message Passing – Mailboxes – Deadlocks – Synchronization and scheduling in multiprocessor Operating Systems
UNIT II LINUX FUNDAMENTALS 9 Introduction to Linux – Basic Linux commands and concepts – Logging in - Shells - Basic text editing - Advanced shells and shell scripting – Linux File System –Linux programming - Processes and threads in Linux - Inter process communication – Devices – Linux System calls
UNIT III INTRODUCTION TO EMBEDDED LINUX 9 Embedded Linux – Introduction – Advantages- Embedded Linux Distributions - Architecture - Linux kernel architecture - User space – linux startup sequence - GNU cross platform Tool chain
UNIT IV BOARD SUPPORT PACKAGE AND EMBEDDED STORAGE 9 Inclusion of BSP in kernel build procedure - The bootloader Interface – Memory Map – Interrupt Management – PCI Subsystem – Timers – UART – Power Management – Embedded Storage – Flash Map – Memory Technology Device (MTD) –MTD Architecture - MTD Driver for NOR Flash – The Flash Mapping drivers – MTD Block and character devices – mtdutils package – Embedded File Systems – Optimizing storage space – Turning kernel memory
UNIT V EMBEDDED DRIVERS AND APPLICATION PORTING 9 Linux serial driver – Ethernet driver – I2C subsystem – USB gadgets – Watchdog timer – Kernel Modules – Application porting roadmap - Programming with pthreads – Operting System Porting Layer – Kernel API Driver - Case studies - RT Linux – uClinux
TOTAL : 45 periods
TEXT BOOK1. Raghavan.P ,Amol Lad , Sriram Neelakandan, „Embedded Linux System Design and
Development‟, Auerbach Publications 2006
16
REFERENCES 1. Dhananjay M. Dhamdhere, „Operating Systems A concept based Approach‟, Tata
Mcgraw-Hill Publishing Company Ltd 2. Matthias Kalle Dalheimer, Matt Welsh, ‟Running Linux‟, O‟Reilly Publications 2005 3. Mark Mitchell, Jeffrey Oldham and Alex Samuel „Advanced Linux Programming‟ New
Riders Publications 4. Karim Yaghmour, „Building Embedded Linux Systems‟, O'Reilly Publications 2003.
REAL TIME SYSTEMS
AIMTo nourish the student’s design ability by introducing about the real time system structure, design procedures and issues. Also the elemental concepts in programming languages, tools and communication for a real time operating system design.
OBJECTIVES To impart the facts of task and scheduling concepts in a real time system. To be familiar with programming languages and tools of RTOS. To introduce the fine points of real time databases.
17
L T P C3 0 0 3
To understand the basic concepts in real time operating system communication and evaluation.
UNIT I INTRODUCTION 9
Introduction – Issues in Real Time Computing, Structure of a Real Time System, Task classes, Performance Measures for Real Time Systems, Estimating Program Run Times. Task Assignment and Scheduling – Classical uniprocessor scheduling algorithms, Uniprocessor scheduling of IRIS tasks, Task assignment, Mode changes, and Fault Tolerant Scheduling.
UNIT II PROGRAMMING LANGUAGES AND TOOLS 9 Introduction – Desired language characteristics, Data typing, Control structures, Facilitating Hierarchical Decomposition, Packages, Run – time (Exception) Error handling, Overloading and Generics, Multitasking, Low level programming, Task Scheduling, Timing Specifications, Programming Environments, Run – time support.
UNIT III REAL TIME DATABASES 9 Introduction – Basic Definition, Real time Vs General Purpose Databases, Main Memory Databases, Transaction priorities, Transaction Aborts, Concurrency control issues, Disk Scheduling Algorithms, Two – phase Approach to improve Predictability, Maintaining Serialization Consistency, Databases for Hard Real Time Systems.
UNIT IV COMMUNICATION 9 Real – Time Communication – Communications media, Network Topologies Protocols, Fault Tolerant Routing. Fault Tolerance Techniques – Fault Types, Fault Detection. Fault Error containment Redundancy, Data Diversity, Reversal Checks, Integrated Failure handling.
UNIT V EVALUATION TECHNIQUES 9 Reliability Evaluation Techniques – Obtaining parameter values, Reliability models for Hardware Redundancy, Software error models. Clock Synchronization – Clock, A Nonfault – Tolerant Synchronization Algorithm, Impact of faults, Fault Tolerant Synchronization in Hardware, Fault Tolerant Synchronization in software.
TOTAL : 45 periods TEXT BOOK
1. C.M. Krishna, Kang G. Shin, “Real – Time Systems”, McGraw – Hill International Editions, 1997.
REFERENCES 1. Stuart Bennett, “Real Time Computer Control – An Introduction”, Prentice Hall of
India, 1998.2. Peter D.Lawrence, “Real Time Micro Computer System Design – An Introduction”,
McGraw Hill, 1988.3. S.T. Allworth and R.N.Zobel, “Introduction to real time software design”, Macmillan,
2nd Edition, 1987.4. R.J.A Buhur, D.L Bailey, “An Introduction to Real – Time Systems”, Prentice – Hall
International, 1999.5. Philip.A.Laplante, “Real Time System Design and Analysis”, Prentice Hall of India, 3rd
Edition, April 2004.
18
EMBEDDED CONTROL SYSTEMS L T P C 3 0 0 3
AIMTo enable the student to get a detailed knowledge of all the hardware components and to understand the different interfaces required for connecting these hardware devices.
OBJECTIVESTo introduce issues related to CPU and memory.To understand the components on the motherboardTo understand different data convertors To introduce the features of different I/O peripheral devices and their interfaces.
UNIT I INTRODUCTION 9Controlling the hardware with software – Data lines, Address lines, Ports – Schematic representation – Bit masking – Programmable peripheral interface – Switch input detection – 74 LS 244
UNIT II INPUT-OUTPUT DEVICES 9Keyboard basics – Keyboard scanning algorithm – Multiplexed LED displays –Character LCD modules, LCD module display, Configuration – Time-of-day clock – Timer manager - Interrupts - Interrupt service routines, IRQ, ISR, Interrupt vector or dispatch table multiple-point - Interrupt-driven pulse width modulation.
UNIT III D/A AND A/D CONVERSION 9R 2R ladder - Resistor network analysis - Port offsets - Triangle waves analog vs. digital values - ADC0809 – Auto port detect - Recording and playing back voice – Capturing analog
19
information in the timer interrupt service routine - Automatic, multiple channel analog to digital data acquisition.
UNIT IV ASYNCHRONOUS SERIAL COMMUNICATION 9Asynchronous serial communication – RS-232, RS-485 – Sending and receiving data – Serial ports on PC – Low-level PC serial I/O module, Buffered serial I/O.
UNIT V CASE STUDIES: EMBEDDED C PROGRAMMING 9Multiple closure problems – Basic outputs with PPI – Controlling motors – Bi-directional control of motors – H bridge – Telephonic systems – Stepper control – Inventory control systems.
TOTAL: 45 periods
TEXTBOOKS:
1. Jean J. Labrosse, “Embedded Systems Building Blocks: Complete and Ready-To-Use Modules in C”, The publisher, Paul Temme, 2003.
2. Ball S.R., ‘Embedded microprocessor Systems – Real World Design’, Prentice Hall, 2001.
REFERENCES:
1. Herma K, “Real Time Systems – Design for distributed Embedded Applications”, Kluwer Academic, 2003.
2. Daniel W. Lewis, “Fundamentals of Embedded Software where C and Assembly meet”, PHI, 2002.
20
SEMESTER IV
MATLAB PROGRAMMING IN EMBEDDED APPLICATION
AIMOn completion of this course the students will be able to know a MATLAB
based on the theoretical knowledge & programming skills developed while undergoing the course.
OBJECTIVEThe objective is how MATLAB is necessary for learning the Fundamentals for Engineering.
UNIT 1 Introduction 9Basics of MATLAB- MATLAB windows- input-output-file types- platform dependences-general command-
UNIT II Tutorial lessons 9Basics-Minimum MATLAB session-creating and working with arrays of numbers- printing simple plots-creating, saving and executing a script file- executing a function file-Directional explorations-working with arrays- working with anonymous functions-symbolic computations- importing and exporting data-working with files and directories- publishing reports.
UNIT III Interactive computations 9Matrices and vectors- matrix and array operations-character string-special note on array operation-command line functions- using built in functions and on line help- saving and loading data- plotting simple graphs.
UNIT IV Programming in MATLAB: Scripts and functions 9Script files-function files-language specific features-advanced data objects-publishing reports.
UNIT V Applications 9Linear algebra-curve fitting and interpolation- data analysis and statistics- ordinary differential equations- non linear algebraic equations- roots of polynomials.
TOTAL: 45+15(Tutorial) = 60 periodsText Book:
1. Getting Started with MATLAB A quick Introduction for scientists and Engineers by Rudra Pratap, New york. Oxford,Oxford University Press 2010.
Reference Books:
21
L T P C3 1 0 4
1. A Guide to MATLAB®for Beginners and Experienced Users Second EditionUpdated for MATLAB® 7 and Simulink® 6 Brian R. Hunt -Ronald L. Lipsman -Jonathan M. Rosenberg
2. Engineering Computations: An Introduction Using MATLAB and Excel by Joseph C. Musto-Milwaukee School of Engineering William E. Howard- East Carolina University McGrawHill- 2009 -Tel: 8007224726.
22
SEMESTER V
PROJECT PHASE I L T P C 3 0 0 6
AIMTo learn the Basic knowledge of project works in embedded systems on various Applications.
OBJECTIVEThe Research Project is intended to be a challenge to intellectual and knowledge and analytical skill gained in different disciplines. Students builds self confidence demonstration and develops by successfully completing the projects
23
SEMESTER VI
PROJECT PHASE II L T P C 0 0 24 12
AIMTo learn the Basic knowledge of project works in an embedded system on various Applications.
OBJECTIVEThe Research Project is intended to be a challenge to intellectual and knowledge and analytical skill gained in different disciplines. Students builds self confidence demonstration and develops by successfully completing the projects
24
ELECTIVE
DATA COMPRESSION TECHNIQUES
AIMTo study about the different compression techniques used in dip
OBJECTIVE To introduce the students about the compression techniques and it types with its
algorithms
UNIT I INTRODUCTION 9Special features of Multimedia – Graphics and Image Data Representations –Fundamental Concepts in Video and Digital Audio – Storage requirements for multimedia applications -Need for Compression - Taxonomy of compression techniques – Overview of source coding, source models, scalar and vector quantization theory – Evaluation techniques – Error analysis and methodologies
UNIT II TEXT COMPRESSION 9Compaction techniques – Huffmann coding, Adaptive Huffmann Coding, Arithmatic coding, Shannon-Fano coding, Dictionary techniques, LZW family algorithms.
UNIT III AUDIO COMPRESSION 9Audio compression techniques - ì- Law and A- Law companding. Frequency domain and filtering – Basic sub-band coding – Application to speech coding – G.722 – Application to audio coding – MPEG audio, progressive encoding for audio – Silence compression, speech compression techniques – Formant and CELP Vocoders.
UNIT IV IMAGE COMPRESSION 9Predictive techniques – DM, PCM, DPCM: Optimal Predictors and Optimal Quantization– Contour based compression – Transform Coding – JPEG Standard – Sub-band coding algorithms - Design of Filter banks – Wavelet based compression - Implementation using filters – EZW, SPIHT coders – JPEG 2000 standards - JBIG, JBIG2 standards.
UNIT V VIDEO COMPRESSION 9Video compression techniques and standards – MPEG Video Coding I - MPEG – 1 and 2– MPEG Video Coding II - MPEG – 4 and 7 – Motion estimation and compensation techniques – H.261 Standard, DVI technology – PLV performance – DVI real time compression, Packet Video.
TEXT BOOK:1. Peter Symes, “Digital Video Compression”, Mc Graw Hill, 1st Edition, 2004.2. Mark S.Drew, Ze-Nian Li, “Fundamentals of Multimedia”, Prentice Hall International, 1st Edition, 2003.
REFERENCE BOOKS:1. Khalid Sayood, “Introduction to Data Compression”, Morgan Kauffman Harcourt India, 2nd Edition, 2000.
25
L T P C3 0 0 3
2. David Salomon, “Data Compression –The Complete Reference”, Springer Verlag New York Inc., 2nd Edition, 2001.3. Yun Q.Shi, Huifang Sun, “Image and Video Compression for Multimedia Engineering - Fundamentals, Algorithms & Standards”, CRC press, 2003.
26
DATA COMMUNICATION NETWORKS
AIMTo introduce the concept, terminologies, and technologies used in modern data communication and computer networking.
OBJECTIVES To introduce the students the functions of different layers. To introduce IEEE standard employed in computer networking. To make students to get familiarized with different protocols and network
components.
UNIT I 9Data Communication: Data Communication system components, Networks, Protocols - Standard making organizations - Data rate and Channel capacity - Encoding and Digital data communication techniques-Concepts of source coding and channel coding - Asynchronous and Synchronous transmission - Comparison of bit / baud for various keying technique ASK, PSK, FSK, QAM - Interfaces and modems - Digital data transmission - Parallel and Serial DTE / DCE interface data terminal equipment, data circuit terminating equipment.
UNIT II 9Computer Networks: Network Structure - Network Architecture - Line configuration - Topology of networks - Transmission modes - Categories of Networks - Inter-Networks - OSI model - Functions of different layers - Physical layer - Switching: Circuit switching, Packet switching, Message switching - Network layer - Connection oriented and connectionless services. Local area network - Networking and inter-networking devices - Repeater - Bridges - Routers - Gateways - Ethernet - Token bus - Token ring - FDDI comparison - LAN controller.
UNIT III 9Types of errors and detection, redundancy, VRC, LRC, CRC techniques - Error correction - Forward and backward error correction - Single bit and multi bit error correction - Hamming code. Data link control: Need for data link control - Line discipline, ENQ / ACK, Flow control stop and wait sliding window protocol, Error control, ARQ, Stop and wait ARQ, Sliding window ARQ Protocols: Asynchronous and Synchronous communications - Asynchronous and Synchronous Protocol.
UNIT IV 9Network layer design issues, Congestion Control algorithm, Routing algorithm - Transport layer - Design issues- Duties of the Transport layer, Connection management - OSI Transport Protocol - Transport Protocol data unit. Network layer design issues, Congestion Control algorithm, Routing algorithm - Transport layer - Design issues - Duties of the Transport layer, Connection management - OSI Transport Protocol - Transport Protocol data unit.
UNIT V 9Upper OSI layers - Session layer: Session and Transport initialization - Synchronization points - Session Protocol Data unit - Presentation layer - Translation - Encryption / Decryption, Substitution and transposition Ciphers, Data Encryption Standards (DES), DES Chaining, Breaking DAS, Public key cryptography, Authentication - Data Compression.Application layer - Message handling systems - Presentation concepts – SNMP-Abstract syntax notation.1 (ASN.1), structure of management, Protocols File Transfer Access and
27
L T P C3 0 0 3
Management (FTAM) - Virtual Terminal (VT) - Directory services - Common Management Information Protocol - TCP/IP: TCP/IP and the Internet - TCP/IP and OSI, IP and other protocols in the Network layer, UDP .
TOTAL: 45 periodsTEXT BOOKS
1. Behrouz Forouzan, “Introduction to Data Communications and Networking”, Tata McGraw Hill, 2nd Edition, 2001. 2. Stallings, “Data and Computer Communications”, PHI, 5th Edition, 1997.
REFERENCE BOOKS1. William Schewber ,“Data Communication”, McGraw Hill, 1987.2. Tanenbaum , “Computer Networks”, PHI, 3rd Edition, 1996
WIRELESS AND MOBILE COMMUNICATION L T P C 3 0 0
3
AIMTo introduce the concepts of wireless / mobile communication using cellular environment. To make the students to know about the various modulation techniques, propagation methods, coding and multi access techniques used in the mobile communication. Various wireless network systems and standards are to be introduced.
OBJECTIVES It deals with the fundamental cellular radio concepts such as frequency reuse
and handoff. This also demonstrates the principle of trunking efficiency and how trunking and interference issues between mobile and base stations combine to affect the overall capacity of cellular systems.
28
It presents different ways to radio propagation models and predict the large – scale effects of radio propagation in many operating environment. This also covers small propagation effects such as fading, time delay spread and Doppler spread and describes how to measures and model the impact that signal bandwidth and motion have on the instantaneous received signal through the multi-path channel.
It provides idea about analog and digital modulation techniques used in wireless communication. It also deals with the different types of equalization techniques and diversity concepts.
It provides an introduction to speech coding principles which have driven the development of adaptive pulse code modulation and linear predictive coding techniques are presented. This unit also describes the time, frequency code division multiple access techniques as well as more recent multiple access technique such as space division multiple access.
It deals with second generation and third generation wireless networks and worldwide wireless standards.
UNIT I INTRODUCTION 9Wireless Transmission-signal propagation-spread spectrum-Satellite Networks-Capacity Allocation-FAMA-DAMA-MAC
UNIT II MOBILE NETWORKS 9
Cellular Wireless Networks-GSM-Architecture-Protocols-Connection Establishment-Frequently Allocation-Routing-Handover-Security-GPRA
UNIT III WIRELESS NETWORKS 9 Wireless LAN-IEEE 802.11 Standard-Architecture-Services-AdHoc Network-HiperLan-Blue Tooth UNIT IV ROUTING
9 Mobile IP-DHCP- AdHoc Networks-Proactive and Reactive Routing Protocols-Multicast Routing
UNIT V TRANSPORT AND APPLICATION LAYERS 9 TCP over Adhoc Networks-WAP-Architecture-WWW Programming Model-WDP-WTLS-WTP-WSP-WAE-WTA Architecture-WML-WML scripts
TOTAL : 45 periods
TEXT BOOKS1. William Stallings, “ Wireless communications and Networks”, PHI/Pearson Education,
20022. Jochen Schiller, “ Mobile communications”, PHI/Pearson Education, Second Edition,
2003.
REFERENCES1. Kaveh Pahlavan, Prasanth Krishnamoorthy, “ Principles of Wireless Networks’
PHI/Pearson Education, 20032. Uwe Hansmann, Lothar Merk, Martin S. Nicklons and Thomas Stober, “ Principles of
Mobile computing”, Springer, New york, 2003.
29
3. C.K.Toh, “ AdHoc mobile wireless networks”, Prentice Hall, Inc, 2002.4. Charles E. Perkins, “ Adhoc Networking”, Addison-Wesley, 2001.
30
DIGITAL IMAGE PROCESSING L T P C 3 0 0 3AIMTo introduce the student to various image processing techniques.
OBJECTIVES To study the image fundamentals and mathematical transforms necessary for
image processing. To study the image enhancement techniques To study image restoration procedures. To study the image compression procedures. To study the image segmentation and representation techniques.
UNIT I FUNDAMENTALS OF IMAGE PROCESSING 9 Introduction – Steps in image processing systems – Image acquisition – Sampling and Quantization – Pixel relationships – Color fundamentals and models, File formats, Image operations – Arithmetic, Geometric and Morphological.
UNIT II IMAGE ENHANCEMENT 9 Spatial Domain: Gray level Transformations – Histogram processing – Spatial filtering
smoothing and sharpening. Frequency Domain: Filtering in frequency domain – DFT, FFT,
DCT – Smoothing and sharpening filters – Homomorphic Filtering.
UNIT III IMAGE SEGMENTATION AND FEATURE ANALYSIS 9 Detection of Discontinuities – Edge operators – Edge linking and Boundary Detection –
Thresholding – Region based segmentation – Morphological Watersheds – Motion
Segmentation, Feature Analysis and Extraction.
UNIT IV MULTI RESOLUTION ANALYSIS AND COMPRESSIONS 9 Multi Resolution Analysis: Image Pyramids – Multi resolution expansion – Wavelet
Transforms. Image compression: Fundamentals – Models – Elements of Information Theory –
Error free compression – Lossy Compression – Compression Standards.
UNIT V APPLICATIONS OF IMAGE PROCESSING 9 Image classification – Image recognition – Image understanding – Video motion analysis –
Image fusion – Steganography – Digital compositing – Mosaics – Colour Image Processing.
TOTAL: 45 periods
31
TEXT BOOK1. Rafael C. Gonzalez and Richard E. Woods, “Digital Image Processing”, 2nd Edition,
Pearson Eduction, 2003.
REFERENCES1. Milan Sonka, Vaclav Hlavac and Roger Boyle, “Image Processing, Analysis and
Machine Vision ”, 2nd Edition, Thomson Learning, 2001.2. Anil K. Jain, “Fundamentals of Digital Image Processing”, Pearson Education, 2003.
32
TESTING AND TESTABILITY OF CMOS L T P C 3 0 0 3
UNIT I INTRODUCTION TO TEST AND DESIGN FOR TESTABILITY (DFT) FUNDAMENTALS:Modeling: Modeling Digital Circuits at Logic Level, Register Level and Structural Models. Levels of Modeling. Logic Simulation: Types of Simulation, Delay Models, Element Evaluation, Hazard Detection, Gate Level Event Driven Simulation.
UNIT II FAULT M O D E L I N G A N D TESTING FOR SINGLE STUCK FAULTS (SSF):9
Logic Fault Models, Fault Detection and Redundancy, Fault Equivalence and Fault Location. Single Stuck and Multiple Stuck – Fault Models. Fault Simulation Applications, General Techniques for Combinational Circuits.Automated Test Pattern Generation (ATPG/ATG) For Ssfs In Combinational and Sequential Circuits, Functional Testing With Specific F a u l t M o d e l s . Vector S i m u l a t i o n – A T P G V e c t o r s , F o r m a t s , C o m p a c t i o n a n d Compression, Selecting ATPG Tool.
UNIT III DESIGN FOR TESTABILITY:
9
9Testability Trade-Offs, Techniques. Scan Architectures and Testing – Controllability and Absorbability, Generic Boundary Scan, Full Integrated Scan, Storage Cells for Scan Design. Board Level and System Level DFT Approaches. Boundary Scans Standards. Compression Techniques – Different Techniques, Syndrome Test and Signature Analysis.
UNIT IV BUILT-IN SELF-TEST (BIST): 9BIST Concepts and Test Pattern Generation. Specific BIST Architectures – CSBL, BEST, RTS, LOCST, STUMPS, CBIST, CEBS, RTD, SST, CATS, CSTP, BILBO. Brief Ideas on Some Advanced BIST Concepts and Design for Self-Test at Board Level.
UNIT V MEMORY BIST (MBIST): 9Memory Test Architectures and Techniques – Introduction to Memory Test, Types of Memories and Integration, Embedded Memory Testing Model. Memory Test Requirements for MBIST. Introduction to Automatic in Circuit Testing (ICT), JTAG Testing Features.
TEXT BOOKS:1. Miron Abramovici, Melvin A. Breur, Arthur D.Friedman, Digital Systems Testing and Testable Design, Jaico Publishing House, 2001.
REFERENCES:
33
1. Alfred Crouch, Design for Test for Digital ICs & Embedded Core Systems, Prentice Hall.2. Robert J.Feugate, Jr., Steven M.Mentyn, Introduction to VLSI Testing, Prentice Hall, Englehood Cliffs, 1998.
BEYOND THE SYLLABUS:1. Digital Systems Design for testing and testability.2. Economics in Testing and Testability.3. Testing and testability for FPGA.
URL LINK:1. www.amazon.com › Books › New, Used & Rental Textbooks2. www.best test .com/courses/economicsof test .cfm 3. en.wikipedia.org/wiki/Design_for_testing
ADVANCED DIGITAL SIGNAL PROCESSING
AIMTo introduce the concept of analyzing discrete time signals & systems in the time and frequency domain.
OBJECTIVES
34
L T P C3 0 0 3
To classify signals and systems & their mathematical representation. To analyse the discrete time systems. To study various transformation techniques & their computation. To study about filters and their design for digital implementation. To study about a programmable digital signal processor & quantization effect
UNIT I DISCRETE TIME SIGNALS AND SYSTEMS 9Representation of discrete time signal - classifications - Discrete time - system - Basic operations on sequence - linear - Time invariant - causal - stable - solution to difference equation - convolution sum - correlation - Discrete time Fourier series - Discrete time Fourier transform.
UNIT II FOURIER STRUCTURE REALIZATION AND FILTERS 9Discrete Fourier transform - properties - Fast Fourier transform - Z-transform - structure realization - Direct form - FIR Filter - windowing technique - linear phase FIR filter - IIR filter - Bilinear transformation technique - impulse invariance method - Butterworth filter - Tchebyshev filter.
UNIT III MULTISTAGE REPRESENTATION 9
Sampling of band pass signal - anti aliasing filter - Decimation by a n integer factor - interpolation by an integer factor - sampling rate conversion - implementation of digital filter banks - sub-band coding - Quadrature mirror filter - A/D conversion - Quantization - coding - D/A conversion - Introduction to wavelets.
UNIT IV TMS 320C55X DIGITAL SIGNAL PROCESSOR 9Architecture – Peripherals-Addressing modes-Pipeline and Parallelism-Instruction set-Assembly language programming- C Language programming-Mixed C and assembly language programming
UNIT V ADSP 2181 9Architecture – Peripherals-Addressing modes-Pipeline and Parallelism-Instruction set-Assembly language programming- C Language programming
TOTAL: 45+15(Tutorial) = 60 periods
TEXT BOOKS1. John G.Proakis, Dimitris, G.Manolakis, "Digital Signal Processing: Principles,
Algorithms and Applications", PHI 2. B.Venkatramani & M.Bhaskar, "Digital Signal Processors architecture, programming
and applications", TMH, 20023. Real-time digital signal processing: implementations and applications
By Sen-Maw Kuo, Bob H. Lee, Wenshun Tian
REFERENCES1. S.Salivahanan, A.Vallavaraj and C.Gnanapriya, "Digital Signal Processing", TMH, 2000 2. A.V. Oppenheim and R.W.Schafer, Englewood, "Digital Signal Processing", Prentice-
Hall Inc, 1975 3. Rabiner and Gold, "Theory and Application of Digital Signal Processing, A
comprehensive, Industrial - Strength DSP reference book"
35
DESIGN OF EMBEDDED COMMUNICATION SOFTWARE
AIMTo give sufficient background for undertaking embedded communication software design.
OBJECTIVES To introduce students to the OSI Layer. To explain the concepts of software partitioning To explain the concepts of tables & other data structures To explain the concepts of management software To explain the concepts of multi board communication software design
UNIT I INTRODUCTION TO COMMUNICATION 9OSI Reference Model Communication Devices - Communication Echo System Design Consideration - Host Based Communication - Embedded Communication System - OS Vs RTOS.
UNIT II SOFTWARE PARTITIONING 9
Limitation of strict Layering - Tasks & Modules - Modules and Task Decomposition -Layer2
36
L T P C3 0 0 3
Switch - Layer3 Switch / Routers - Protocol Implementation - Management Types - Debugging Protocols.
UNIT III TABLES & OTHER DATA STRUCTURES 9
Partitioning of Structures and Tables - Implementation - Speeding Up access - Table Resizing - Table access routines - Buffer and Timer Management - Third Party Protocol Libraries
UNIT IV MANAGEMENT SOFTWARE 9
Device Management - Management Schemes - Router Management - Management of Sub System Architecture - Device to manage configuration - System Start up and configuration.
UNIT V MULTI BOARD COMMUNICATION SOFTWARE DESIGN 9
Multi Board Architecture - Single control Card and Multiple line Card Architecture - Interface for Multi Board software - Failures and Fault - Tolerance in Multi Board Systems - Hardware independent development - Using a COTS Board - Development Environment - Test Tools.
TOTAL: 45 periodsTEXT BOOK
1. Sridhar .T, "Designing Embedded Communication Software", Elsevier publications, 2003
ELECTROMAGNETIC INTERFERENCE & COMPATIBILITY
UNIT I EMI ENVIRONMENT 9Introduction to EMI/EMC-Basics of electro Magnetic interference (EMI) Fundamentals of electromagnetic compatibility (EMC)-Radiation hazards Transients and other EMI sources, Transients, Electrostatics discharge (ESD) -Tempest - Lightning – Standards of EMI.
UNIT II EMI COUPLING 9 EMI from apparatus and circuits: Introduction-Electromagnetic emission-Appliances-noise from relays and switches-nonlinearities in circuits-Passive inter modulation-Cross talk in transmission lines-Transmission in power supply lines-Electromagnetic interference.
UNIT III EMI CONTROL TECHNIQUE 9Shielding technique-Filter techniques-Grounding techniques-Bonding techniques-Cable connectors and components-Isolation transformer-Transient suppressor.
UNIT IV EMC DESIGN OF PCB 9Designing for EMC: Introduction-Different techniques involved in designing for EMC-EMC guide lines for PCB designs-EMC design guide line for audio and control circuit design-EMC guide lines for RF design-EMC guidelines for power supply design-Mother board designs and propagation delay performance models
37
L T P C3 0 0 3
UNIT V EMC IN COMMUNICATION SYSTEM 9 Definition and types of Transmitter- receivers- Antennas. Transmitter EMC considerations- Receiver EMI problems- Transmitter leakage- Local oscillator leakage- Inter modulation- cross modulation
TEXT BOOK1. Bernhard Keiser,” Principles of Electromagnetic Compatibility”, Artech house, 3rd Edition, 1986.
REFERENCES BOOKS1. Henry W.Ott, “Noise reduction Techniques in Electronics systems”, Johnwiley and sons., New York, 1976.2. DonWhite consultant incorporate, Handbook of EMI/EMC”, Vol 1-19853. Clayton R. Paul, “Introduction to EMC”, Wiley & sons, 2006.4. Sathyamurthy S., “Basics of Electro Magnetic Compatibility”, Society of EMC Engineers (India), 2003.5. Kodali V.P., "Engineering EMC Principles, Measurements and Technologies", IEEE Press, 2001
ADVANCED COMPUTER ARCHITECTURE
UNIT I FUNDAMENTALS OF COMPUTER DESIGN: Technology trends, cost- measuring and reporting performance quantitative principles of computer design.
UNIT II INSTRUCTION SET PRINCIPLES AND EXAMPLES: Classifying instruction set, memory addressing, type and size of operands, addressing modes for signal processing, operations in the instruction set- instructions for control flow- encoding an instruction set.-the role of compiler
UNIT III INSTRUCTION LEVEL PARALLELISM (ILP): Overcoming data hazards, reducing branch costs, high performance instruction delivery, and hardware based speculation, limitation of ILP
UNIT IV ILP SOFTWARE APPROACH AND MEMORY HIERARCHY DESIGN: Compiler Techniques, Static Branch Protection, VLIW Approach, H.W support for more ILP at compile time- H.W verses S.W solutions cache performance, reducing cache misses penaltyand miss rate, virtual memory, protection and examples of VM.
UNIT V MULTIPROCESSORS AND THREAD LEVEL PARALLELISM: Symmetric shared memory architectures, distributed shared memory, Synchronization, multi threading. Types, Buses, RAID, errors and failures, bench marking a storage device, designing a I/O system.
TEXT BOOKS:1. John. Hennessy & David A. Patterson Morgan Kufmann,”Computer Architecture AQuantitative approach”, 3rd edition (An Imprint of Elsevier)
38
L T P C3 0 0 3
REFERENCES:1. Kai Hwang and A. Briggs, “Computer Architecture and parallel Processing”, InternationalEdition McGraw-Hill.2. Dezso Sima, Terence Fountain, Peter
:
39
ROBOTICS & AUTOMATION
AIMTo introduce the basic concepts, parts of robots and types of robots
OBJECTIVES To make the student familiar with the various drive systems for robot, sensors
and their applications in robots, programming of robots To discuss about the various applications of robots, justification,
implementation and safety of robot
UNIT I INTRODUCTION 9Definition – need - robot classification - terminology and systems - benefits and Limitations – basic problems of intelligent robotics – computers for logic and logic programming.
UNIT II ROBOT SYSTEM 9Robot physical configuration - basic robot motions - end effectors work cell control and interlocks.
UNIT III ROBOT SENSORS 9Vision tactile and proximity – voice - robot control - kinetics and necessary control systems – advanced programming skills to write AI robotic programs in LISP.
UNIT IV ROBOT APPLICATION 9
General considerations and problems - material transfer - machine loading – welding - spray coating - processing operations – assembly – inspection - robot in FMS and automation – robots in health care and intelligent homes
UNIT V ROBOT ARM KINEMATICS 9Robot arm kinematics - Homogenous transformation matrix.
TOTAL: 45 periodsTEXT BOOK
1. Stuart Russell and Peter Norvig, Artificial Intelligence. A Modern Approach, Prentice Hall, 2004.
REFERENCES1. Handbook of Industrial robotics, 2005.2. Aures R.U. & Miller S.M, Robotics applications and social implications, 2002.3. Tanner W.R, Industrial Robots Vol.-1 & Vol.-2, 2005.
APPLICATIONS OF MEMS TECHNOLOGY
AIMTo give sufficient background on MEMS Technology
OBJECTIVES
40
L T P C3 0 0 3
L T P C3 0 0 3
To introduce students to micro-fabrication, materials and electro-mechanical Concepts. To introduce the electrostatic sensors and actuation. To introduce the thermal sensing and actuation. To introduce the piezoelectric sensing and actuation.
UNIT I MEMS: MICRO-FABRICATION, MATERIALS AND ELECTRO-MECHANICAL CONCEPTS 9 Overview of micro fabrication – Silicon and other material based fabrication processes – Concepts: Conductivity of semiconductors-Crystal planes and orientation-stress and strain-flexural beam bending analysis-torsional deflections-Intrinsic stress- resonant frequency and quality factor. UNIT II ELECTROSTATIC SENSORS AND ACTUATION
9 Principle, material, design and fabrication of parallel plate capacitors as electrostatic sensors and actuators-Applications
UNIT III THERMAL SENSING AND ACTUATION 9
Principle, material, design and fabrication of thermal couples, thermal bimorph sensors, thermal resistor sensors-Applications.
UNIT IV PIEZOELECTRIC SENSING AND ACTUATION 9 Piezoelectric effect-cantilever piezo electric actuator model-properties of piezoelectric materials-Applications.
UNIT V CASE STUDIES 9 Piezoresistive sensors, Magnetic actuation, Micro fluidics applications, Medical applications, Optical MEMS.
TOTAL: 45 PERIODS TEXT BOOKS
1. Chang Liu, “Foundations of MEMS”, Pearson International Edition, 2006. 2. Marc Madou , “Fundamentals of microfabrication”,CRC Press, 1997.
REFERENCES 1. Boston , “Micromachined Transducers Sourcebook”,WCB McGraw Hill, 1998. 2. M.H.Bao “Micromechanical transducers :Pressure sensors, accelerometers and gyroscopes”, Elsevier, Newyork, 2000.
41





























