Embed Size (px)
Citation preview
N° d'ordre : ECL 88-04 S Année 1988
THESE
présentée devant
1'ECOLE CENTRALE DE LYON
pour oh(enir
le lifte de DOCTEUR
Spécialité : Mécanique
par M. TCHERE SEKAIngénieur des Travaux Publics
METHODE DE CORRECTION
DES CARACTERISTIQUES RESIDUELLES DE
FRONTIERE EN SYNTHESE MODALE
Soutenue le 29 Avril 1988 devant la commission d'examen
Jury MM. J. SABOTR. J. GIBERT
HENRY
L. JEZEQUEL
F. SIDOROFF
TOURE
(Président)
(Rapporteur)
(Rapporteur)
N° d'ordre : ECL 88-04 Année 1988
THESE
présentée devant
1'ECOLE CENTRALE DE LYON
pour obtenir
le titre de DOCTEUR
Spécialité Mécanique
par M. TCHERE SEKAIngénieur des Travaux Publics
METHODE DE CORRECTION
DES CARACTERISTIQUES RESIDUELLES DE
FRONTIERE EN SYNTHESE MODALE
Soutenue le 29 Avril 1988 devant la commission d'examen
y91
Jury MM. J. SABOTR. J. GIBERT
HENRY
L. JEZEQUEL
F. SIDOROFF
TOURE
(Président)
(Rapporteur)
(Rapporteur)
Electronique
P. VIKTOROVITCHBLANCHETKRAWCZYK
P. LEYRALO. BONNAUDJ. BORELJ.P. CHANTE
ECOLE CENTRALE DE LYON
DIRECTEUR A. MOIROUXDIRECTEUR ADJOINT R. RICHE
LISTE DES PERSONNES HABIL1TEES A ENCADRER DES THESES A L'E.C.L.
(Doctorat dtEtat ou Habilitation au sens de rAité du 5 juillet 1984)
Mathématiques-Informatique-Systhmes
B. DAVIDC.M. BRAUNERJ.F. MAITRE
CONRADTHOMASMUSY
Cl. SCHMIDT-LAINE
Physicocbiinie des Matériaux
P. CLECHETP. PICHATJ.M. HERRMANNN. JAFFREZIC
ESCHALIERJ. JOSEPHA. GAGNAIRECl. MARTELETJ.R. MARTINR. OLlER
TAILLANDR. PHILIPPE
Métallurgie et Physique des Matériaux
P. GUIRALDENQD. TREHEUX
COQUILLETD. JUVE (Mme)NGUYEN Du
Professeur 2e ClasseProfesseur 2e Classe - Univ.- BordeauxProfesseur 1ère ClasseMaître Assistant ENSM-St-EtienneMaître de ConférencesMaître de ConférencesChargée de Recherche au CNRS
Professeur 1ère ClasseDirecteur de Recherche au CNRSChargé de Recherche au CNRSChargée de Recherche au CNRSMaître de ConférencesProfesseur 2e ClasseMaître de ConférencesMaître de ConférencesMaître de ConférencesMaître de ConférencesMaître de ConférencesMaître Assistant IUT-St--Etienne
Professeur 1ère ClasseProfesseur 2e ClasseMaître de ConférencesIngénieur d'Etude - 2e C.Assistant Titulaire
Directeur de Recherche au CNRSProfesseur 2e ClasseChargé de Recherche au CNRSMaître AssistantProfesseur - INSA - RennesDirect. Technique Sté E.F.C.I.S.Professeur - INSA - Lyon
Mécanique des Fluides
J. MATHIEIJJ. BATAILLEB. GAYJ.N. GENCE
JEANDELJ.P. SCHON
ALCARAZLEBOEUF
R. MORELCl. CAMBON
CHARNAYJ.P. BERTOGLIOP. FERRAND
Acoustique
(Mlle) G. COMTE-BELLOT Professeur Classe ExceptionnelleM. SUNYACH Professeur IUT-LyonD. JUVE Maître de Conférences - LYON I
Machines Thermiques
M. BRUN Professeur 2e ClassePh. ARQUES Professeur 2e ClasseA. HAUPAIS Maître de Conférences (en disponibilité)
Professeur 2e ClasseProfesseur 1ère Classe - I.N.P.G.Maître de ConférencesMaître de Conférences
Professeur 2e ClasseProfesseur 1ère ClasseMaître de ConférencesProfesseur - E.N.I.S.E.Maître de Conférences
Professeur 1ère ClasseProfesseur Lyon IProfesseur 2e ClasseChargé de Recherche au CNRSDirecteur de Recherche au CNRSMaître de ConférencesMaître de Conférences
Professeur Classe ExceptionnelleProfesseur Lyon IProfesseur Lyon IProfesseur Lyon IProfesseur 2e ClasseProfesseur IUT-St- EtienneProfesseur 2e ClasseMaître de ConférencesMaître Assistant INSAAttaché de Recherche au CNRSMaître de Recherche au CNRSChargé de Recherche au CNRSChargé de Recherche au CNRS
Electrotechnique
Ph. AURIOLA. FOGGIAA. NICOLASG. ROJAT
Mécanique des Solides
B. CAMBOUF. SIDOROFFL. JEZEQUELCl. SURRYL. VINCENT
Technologie des Surfaces
J.M. GEORGESJ. DIMNETJ. SABOTPh. KAPSAT. MATHIAJ.M. MARTINH. MONTES
Iv
"Toutes nos passions son-t Ce refCet cíes étoiles"
Victor hugo(1802-1885)
V
4zamon profeseur de Français
des classes de Mathématiques supérieures et Mathématiques spéciales à Paris,
zdrìwc%
ines associés et amis de l'UNISCEL(Unité Ivoirienne pour la Science, la Culture et l'Economie à Lyon)
VI
REMERCIEMENTS
Ce travail a été réalisé au Laboratoire de Mécanique des Solides de l'Ecole Centrale de
Lyon dirigé par Monsieur le Professeur Bernard GAMBO U. Je tiens à le remercier pour tout
l'accueil dont j'ai bénéficié pendant la préparation de ma thèse.
Qu'il me soit permis d'adresser ines sincères remerciements à Monsieur le Professeur
Fran çois SIDOROFF qui a assuré la direction scien«fi que de mon travail.
Toute ma profonde gratitude va à l'endroit de Monsieur Louis JEZE QUEL, Maître de con-
férences à l'Ecole centrale de Lyon. Il a suscité en nzoi le goût pour la Mécanique des Vibrations et la
recherche et ne m'a jamais ménagé son soutien total tout le long de mon séjour au Laboratoire de
Mécanique des Solides. Ses conseils et ses encouragements m'ont été fort précieux et parfois déter-
minants depuis l'Ecole Nationale des Travaux Publics de l'Etat de Lyon où j'étais son étudiant.
Je remercie vivement Monsieur R. J. GIB ERT Directeur dii Département des Etudes Méca-
niques et Thermiques au Centre d'Etudes Nucléaires (GEN) à Saclay d'avoir accepté d'être rappor-
teur de ce travail.
Mes remerciement vont également au Docteur BRANDON Professeur à University of
Wales Institute of Science and Technology (UWIST,), à Monsieur le Professeur Rémi HENRY du
Département de Mécanique des Structures de l'INSA de Lyon qui ont accepté de juger ce travail, ain-
si qu'à Monsieur le Professeur Jean SABOT du Laboratoire de Mécanique des Surfaces de l'Ecole
Centrale de Lyon qui a bien voulu présider le jury.
Je tiens aussi à exprimer nzes profonds remerciements à Monsieur le Professeur Saliou
TOURE, Directeur de l'Institut de recizerche mat/zénzatique à l'Université Nationale de la Côte
d'Ivoire qui m'a honoré en acceptant d'être menzbe de mon jury.
Je suis reconnaissant envers Monsieur Noël CHA TELUS et Monsieur Jean-Pierre LAINE
de ¡'Equipe Dynamique des structures du Laboratoire de Mécanique des Solides pour toute leur aide.
J'aimerais témoigner ma gratitude à ¡'Equipe du centre de calcul de l'Eco le Centrale de
Lyon, à Monsieur Philippe FALANDRY du Centre National Universitaire Sud de calcul
(C.N.U.S.C.) de Montpellier, et à Monsieur Daniel FIGHOT de la Société METRAVIB d'Ecully qui
m'ont permis de surmonter divers obstacles numériques tout le long de mon travail.
VII
RESUME
Cette étude vise une amélioration des méthodes de synthèse modale par un recalage optimal des cara-
ctéristiques résiduelles de frontière. Une famille de modes de branche est alors introduite pour per-
mettre une connaissance expérimentale de ces termes dont nous présentons une détermination géné-
rale. L'introduction d'un modèle modal basé sur les modes libres s'est avéré particulièrement efficace
à représenter le comportement de sous-structures avec des conditions aux limites quelconques et sa
participation à la dynamique d'un assemblage, le long de nombreux essais effectués. Le recalage né-
cessaire entre les modèles numériques et expérimentaux induit la correction des caractéristiques de
frontière. Deux nouvelles méthodes sont alors introduites dans le cadre de correction des interfaces à
garnd nombre de degrès de liberté. Plusieurs tests ont mis en évidence le recalage parfait de modes
normaux par l'obtention avec précision des fréquences, des réponses temporelles et de déformées
relativement bien approchées de structures corrigées ayant des conditions aux limites pouvant varier
de l'encastrement parfait à la libération complète des frontières de raccordement, dans le cadre de la
synthèse des plaques minces.
ABSTRACT
This study aims at improving modal synthesis methods by optimal correction of residuel boundary
terms. A family of branch is then introduced to a better experimental knowledge of these terms of
whitch we are presenting a general definition. The introduction of a model based on the free modes
has turned out to be particularly successful in presenting the performance of the behaviour of sub-
structure with any boundary conditions and its participation to the dynamic of an assemblage,
throught ths numerous tests we carried out. The necessary adjustement between ths numerical and
experimental models induces ths correction of boundary flexibility terms. Two new methods are then
presented in the context of correction of the interfaces with large number of boundary degrees of
freedom. Several tests have shown the perfect correction of normal modes by the precision obtaining
of the frequencies, temporal responses, and the dynamic deflections relatively well approached of
corrected structures with boundary conditions from perfect closed to complet free interface, in the
context of modal synthesis of thin plates.
CONCLUSION p.231
BIBLIOGRAPHIE
ANNEXES
SOMMAIRE
INTRODUCTION p.1
CHAPITRE 1: SYNThESE MODALE p.4
IN1RODUCTION
GENERALITES SUR L'ANALYSE MODALE
PROBLEME SPECTRAL
SYNTHESE MODALE POUR LES NOEUDS INTERIEURS
IV.DOUBLE SYNTHESE MODALE
CONCLUSION
CHAPITRE 2: CARACTERISTIQUES RESIDUELLES EN SYNTHESEMODALE p.124
INTRODUCTION
IMPORTANCE DES CARACTERISTIQUES RESIDUELLES
CARACTERISTIQUES RESIDUELLES EN ANALYSE DE SENSIBILITE
CONCLUSION
CHAPITRE 3: CORRECTION DES CARACTERISTIQUES DE FRONTIEREp.l48
INTRODUCTION
METHODES DE CORRECTION
APPLICATION AUX FRONTIERES A FAIBLE NOMBRE DE DEGRES DE LIBERTE
APPLICATION AUX FRONTIERES A GRAND NOMBRE DE DEGRES DE LIBERTE
CONCLUSION
INTRODUCTION
i
INTRODUCTION
En Dynamique des structures, les erreurs de modélisation sont souvent localisées
le long des interfaces de raccordement, et elles deviennent pénalisantes lors del'assemblage des organes mécaniques.
Dans le cadre de la Synthèse Modale, on est conduit à introduire des termesrésiduels de frontière afin d'attenuer l'influence néfaste de la troncature modale. Maisl'identification expérimentale de ces caractéristiques résiduelles est difficile etimprécise.
Cependant, il n'existe pas d'études spécifiques sur le recalage des termesrésiduels afin d'améliorer les méthodes de sous-structure. Ceci est dû certainement à ladifficulté de corriger ces termes représentés par des matrices dans le contexte numérique, et qui
impliquent souvent un nombre de degrés de liberté de frontière relativent élevé.
Le but du présent travail est de répondre à ce souci en proposant des méthodesnumériques de correction extensibles au cadre expérimental, afin de recaler lescaractéristiques résiduelles de frontière et améliorer les techniques de synthèsemodale et de sous-structuration.
Les caractéristiques résiduelles sont introduites ( R12 ), (R22 à R24 ), (R32) auniveau des matrices de souplesse dynamique en formulation déplacement, ou à leur équivalent
(R12) lorsqu'on utilise la formulation force. Ces termes résiduels sont adaptés au contexte
numérique et deviennent inutilisables dans le cadre expérimental.
Les méthodes de synthèse modale sont classiquement basées sur l'utilisation des modes
libres et des modes encastrés. Afin de permettre une connaissance expérimentale des termes
résiduels, l'on introduit une troisième famille de modes normaux, dits "modes de
branche", ( R12 ), ( R23 ), ( R25 ) et ( R26 ).
Ces modes de branche sont des modes normaux obtenus à partir d'un chargement de
la structure initiale le long de sa frontière de raccordement, par fixation d'inertiesou d'organes élastiques, ou par couplage avec une structure adjacentequelconque. Cette nouvelle famille de modes va jouer un rôle privilégié dans les techniques
de synthèse modale que nous utilisons dans ce travail. Son importance sera en effet majeure
dans la mise au point de nos méthodes de correction.
2
Nous proposons dans cette étude un modèle modal, appelé B.M.M. ( Basic Modal
Model ) construit à partir des modes libres, des modes de corps rigides et de la souplesse
résiduelle de frontière, en formulation déplacement. Son premier intérêt est son efficacité à
représenter le comportement d'une sous-structure avec des conditions aux limitesquelconques et sa participation à la dynamique d'un assemblage.
Le modèle B.M.M. permet en effet de retrouver les trois principales familles de modes
normaux de la sous-structure considérée les modes encastrés, les modes branches etnaturellement les modes libres sur lesquels il est construit.
Nous introduisons ensuite des méthodes de correction dont le but est de recaler les
modèles numériques représentés par une matrice de masse et de raideur afin que lescaractéristiques des modes mesurés correspondent à celles des modes calculés.
La procédure de recalage du modèle B.M.M. va consister à faire un choix optimal de la
matrice e souplesse résiduelle de frontière et de la participation des modes libres à cette
interface, afin de retrouver les fréquences exactes des modes de branche et d'approcher
au mieux leurs déformées exactes.
Dans le cadre des frontières à grand nombre de degrés de liberté, nous avons proposé
deux nouvelles méthodes de correction basées sur la recherche de perturbations de norme
minimale, et qui font l'originalité de cette étude.
Ces procédures de correction appelées T.C.M. (Total Correction Method) etS.C.M. ( Selectiv Correction Method ) correspondent respectivement à une correctionglobale et sélective des termes de la matrice de souplesse résiduelle.
De nombreux essais numériques ont été effectués dans le cadre de l'assemblage des
plaques minces en acier pour mettre en évidence la double efficacité du modèle B.M.M. et des
méthodes de correction T.C.M. et S.C.M..
On a pu vérifier d'abord le recalage parfait des modes de branche corrigés sur trois
caractéristiques dynamiques majeures : les fréquences calculées avec exactitude; les déformées
modales relativement bien approchées; et l'estimation avec précision des réponses temporelles
de structures obtenues avec des conditions aux limites pouvant varier de l'encastrement à la
libération complète des interfaces de raccordement.
3
On a ensuite déterminé avec efficacité les premiers modes normaux des modèles modaux
corrigés obtenus lorsqu'on impose des modifications structurales majeures comme desvariations de conditions aux limites ou des raccordements avec d'autres sous-structures.
Ce mémoire de thèse est composé de trois chapitres et de huit annexes. Nous présentons
au CHAPITRE i une formulation traditionnelle des problèmes de dynamique des structures,
puis une formulation générale de l'équilibre dynamique ( R12 ), ( R22 à 24 ), à l'aided'opérateurs linéaires différentiels et intégraux elliptiques.
Cette présentation permet d'exprimer la réponse dynamique de la structure à l'aide des
résolvantes des équations et de se rattacher aux problèmes intermédiaires deWEINSTEIN (Rl) et ( R2), dans le cadre des frontières continues.
Les deux formulations continue et discrète ont permis de mettre en valeurl'importance des termes résiduels de frontière dans les méthodes de synthèse modale.
Nous avons notamment montré que l'emploi des termes résiduels au second ordre n'est
justifié qu'aux hautes fréquences où ils apportent une amélioration fréquencielle par rapport aux
termes calculés au premier ordre. Il est donc nécessaire de proposer des méthodes de correction
des caractéristiques résiduelles de frontière afin d'amélioer la détermination des modes normaux
des structures à basses fréquences où les termes du deuxième ordre n'apportent pas de gainsignificatif. C'est l'objet du ChAPITRE 3 qui constitue Ja partie originale de cettethèse,dont certains résultats ont déjà été publiés (R22), (R24 ) et ( R38).
Enfin le CHAPITRE 2 est une transition entre les deux autres. Il établit le calcul
explicite des termes résiduels de frontière et montre leur apport dans d'autres techniques
d'analyse modale comme la méthode de sensibilité.
CHAPITRE iSYNTHESE MODALE
ChAPITRE i
SYNThESE MODALE
INTRODUCTION
I. GENERALITES SUR L'ANALYSE MODALE
¡.1 EQUILIBRE DYNAMIQUE
¡.2 DISCRETISATION DES EQUATIONS DEQUILIBRE
1.3 ANALYSE MODALE
¡.4 INTERET DUNE FORMULATION GENERALE DE LtEQUILIBRE DYNAMIQUE
II. J»ROBLEME SPECTRAL
11.1 FORMULATION PRIMALE
11.2 FORMULATION DUALE
11.3 LIEN ENTRE LES DEUX FORMULATIONS
11.4 TRONCATURE DES RESOLVANTES
III. SYNTHESE MODALE POUR LES NOEUDS INTERIEURS
111.1 PROCEDURE GENERALE
111.2 FORMULATION PRIMALE
111.3 FORMULATION DUALE
111.4 APPLICATION EXPERIMENTALE
IV. POUBLE SYNTHESE MODALE
IV.1 INTRODUCTION AUX PROBLEMES INTERMEDIAIRES
IV.2 FORMULATION PRIMALE
IV.3 FORMULATION DUALE
IV.4 APPLICATION EXPERIMENTALE
CONCLUSION
INTRODUCFJON
Ce chapitre est consacré aux équations générales de la synthèse modale. Il est divisé en
quatre parties. Nous faisons d'abord un rappel des équations classiques de la dynamique des
structures en première partie. Nous montrons ensuite l'intérêt d'une description plus générale de
l'équilibre dynamique à l'aide de deux types d'opérateurs linéaires : les opérateurs différentiels
elliptiques d'ordre quelconque, auto-adjoints dans les problèmes usuels de Mécanique des
Vibrations, et les opérateurs intégraux, compacts et inverses des premiers, construits dans des
espaces de HILBERT. C'est l'objet de la deuxième partie.
Cette généralisation qui tire profit de la richesse des propriétés de telle classe d'espaces
topologiques conduit à deux descriptions complémentaires liées au même problème physique: le
raccordement de sous-structures le long d'interfaces continues. La première description,envisagée dans la troisième partie est une présentation discrète et matricielle des méthodes de
synthèse modale. Elle est adaptée à l'utilisation de la méthode des Eléments Finis et correspond
La deuxième description étudiée dans la quatrième partie est une formulation variationnelle et
continue de l'équilibre dynamique. Elle permet de mieux rendre compte des interfaces de liaison
continues.
Des modèles numériques permettent de tester l'efficacité des méthodes proposées dans la
troisième et quatrième parties.
I. GENERALITES SUR L'ANALYSE MODALE
6
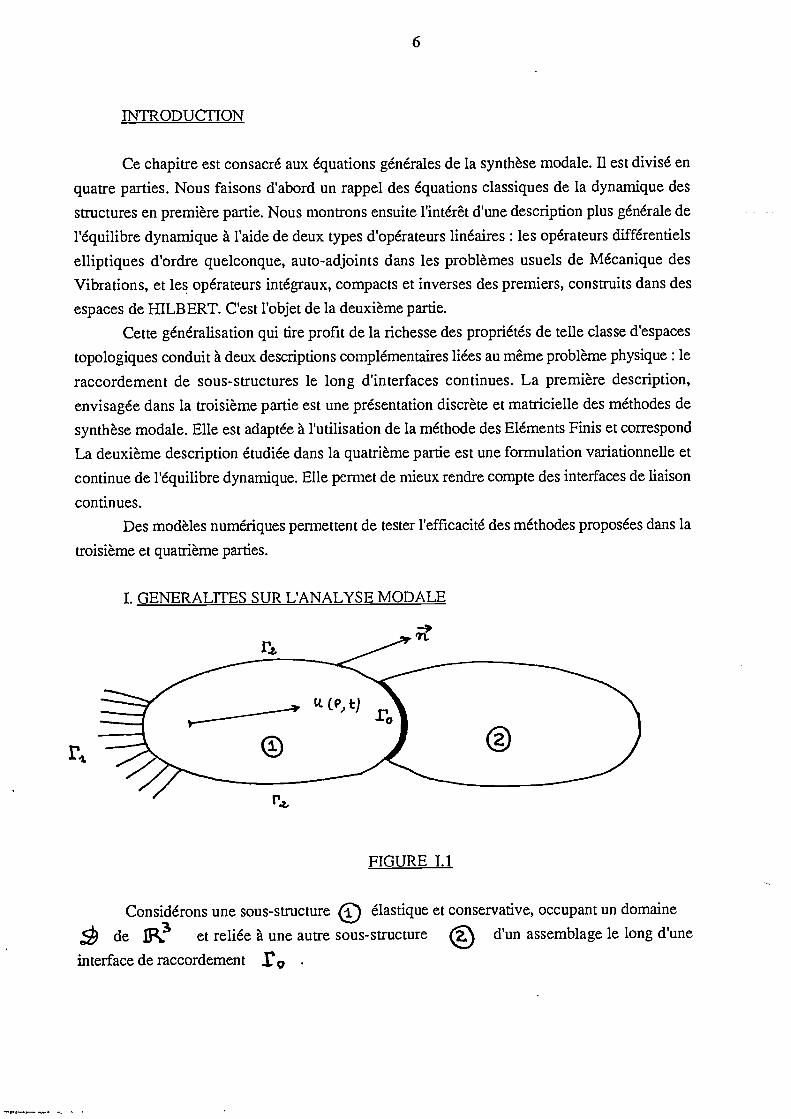
FIGURE 1.1
Considérons une sous-structure © élastique et conservative, occupant un domaine
, de et reliée à une autre sous-structure d'un assemblage le long d'une
interface de raccordement o
7
La frontière r de est composée de trois parties:
* r0 est l'interface de raccordement entre les sous-structures et
On lui associe une distribution de forces 41 indépendantes* est une frontière supposée fixe et peut être éventuellement réduite à l'ensemble
vide.* r est une frontière libre dans toute cette étude.
. 2, ) est le déplacement d'un point £ du domaine 2 à
l'instant
ç' (crc') 33 désigne le tenseur des contraintes de CAUCHY
aupoint £Le tenseur des déformations de GREEN . = (E
S)s'écrit en £
vu.4 1, +(1.1) -
sous l'hypothèse des petits déplacements. La loi de comportement de HOOKE permet de
relier d'une façon objective les tenseurs l3 et
(1.2) = f.Q Eç
où les Ç1) Ç.') sont fonctions des constantes élastiques du
matériau constituant la sous-structure () . L'équation (1.2) peut s'écrire matriciellement
(1.3) c5..= j%rc.,
où ® est un produit tensoriel
1.1 EQUILIBRE DYNAMIOUE
1) Formulation différentielle
Les forces de surface qui s'exercent sur un volume infiniment petit de sont
équilibrées par les forces extérieures de volume et les forces d'inertie.
(1.4) çI o
8
où . (E) est une fonction scalaire
En utilisant l'équation (1.3), l'équilibre (1.4) devient
(1.5) S-i. .t\T z (IA!) + - F\ b2'S -t est une matrice de dimension 3 x 6 d'opérateurs différentiels linéaires du 1er
ordre reliant les forces internes aux composantes du tenseur des contraintes.
S z est une matrice de dimension 6 x 3 d'opérateurs différentiels linéaires du 1er
ordre permettant d'exprimer les contraintes en fonction des composantes du champ de "petits
déplacements".
En utilisant la transformation de FOURIER
(1.7) s N S. (ci)ou encore
(1.6) ()=
e
l'équation (1.5) devient
(1.8) K - 43a
L'opérateur matriciel % G1 N S . représente les forces internes. L'opérateur t'1 Çreprésente les forces d'inertie.
A cette équation (1.8) sont adjointes les conditions aux limites suivantes:
(I.9.a) - ,fl - r0
(I.9.b) L E- r(I.9.c) = 'cl £ Q-
où "S'- est la normale extérieure à au point de t'
2) Formulation variationnelle
Le principe des travaux virtuels exprime l'égalité entre le travail de déformation dans un
déplacement virtuel A. ( S) au temps t et le travail virtuel des forces d'inerties de liaison et
de volume. Le déplacement virtuel doit être cinématiquement admissible, c'est-à-dire que le
champ de déplacement t. (2) doit satisfaire les conditions aux limites de type cinématique.
(1.10) L : c1'u cÇE+
où
* VcL est l'énergie de déformation
* ' . X est le travail des forces d'inertie
* est le travail des forces de liaison
* . est le travail des forces de volume
Explicitons chaque terme du second membre de l'égalité (1.10)
(I.11a) = Jc ZI
(I.11b) ' cS
J Lrv-
où '? est la surface limitant le domaine . L'énergie cinétique de la
structure est définie par
(1.11e)
(1.12)
9
Le principe de HAMILTON conespond à la stationnarité de l'action mécanique vis-à-vis
d'une variation virtuelle de la trajectoire conservant la configuration d'arrivée et de départ, et
permet de relier l'énergie cinétique E c. au travail virtuel des forces d'inertie
par la relation suivante:

L'existence d'une fonction potentielle V,1, est justifiée par l'hypothèse de l'élasticité
linéaire. On défmit le Lagrangien L par
(1.14) L -
L'équation dynamique de la sous-stiucture prend alors la forme suivante
(1.15)
1.2 DISCRETION DES EOUATJONS D'EOUILIBRE
La méthode des Eléments Finis génère des champs de déplacement admissibles. On
discrétise alors l'espace des solutions en considérant le champ de déplacement u..(2) comme
étant une somme pondérée finie de .1 fonctions de base (2) ne dépendant que des
coordonnées spatiales du point 2
(1.16) L.A. U..
(1.17)
lo
Ç j L * (j
= >. (t (2:
où les >. (c' sont des déplacements généralisés ne dépendant que du temps t.
Les fonctions c deux fois différentiables qui satisfont à toutes les conditions aux
limites sont dites "compatibles".
Les fonctions une fois différentiable ne satisfaisant qu'aux conditions
cinématiques sont dites "admissibles".
Ce schéma de discrétisation aboutit à deux types de méthodes suivant qu'il est associé à
une formulation différentielle ou à une fornrnlation variationnelle.
1) Méthode résiduelle associée à la formulation différentielle
Les fonctions vérifient toutes les conditions aux limites et on cherche à
satisfaire au mieux à l'équation d'équilibre (1.8)-
On cherche une solution approchée discrète sous la forme
(1.21)
(1.22)
11
IL ne pourra vérifier l'équation (1.8) qu'exceptionnellement. On introduit alors une fonction
d'erreur (cø1 £) à minimiser par un choix optimal des 5
(1.18) Ç - r ( 3) ; - (w,
La méthode consiste à annuler l'intégrale sur tout le volume de cette erreur
pondérée par une famille de fonctions {- }
(1.19) L (w,2) '1O eC1,t1
Ces s3 équations induisent l'égalité matricielle:
(1.20) tv 3 W t\ 3
où
t.. V. et t. ti1 sont des matrices N x N indépendantes de Cs.). et Z sont des
vecteurs N x i
II existe plusieurs variantes à la méthode, chacune correspondant à un choix particulier
des fonctions q.
Nous utilisons la méthode de GALERKIN qui identifie les fonctions de pondération 4-'
aux fonctions de base c ,.Les éléments des matrices 1y et Çi') s'écrivent alors:
3cJJ'.2
¿pÌ-t
t..dL )(4\dti
Les forces généralisées s'expriment de manière analogue
(1.23) =
Cette méthode de GALERKIN est la plus utilisée. Mais on peut prendre pour
d'autres fonctions. La méthode de collocation utilise comme des diracs.
Dans ce cas les intégrales se calculent simplement
(I.24a) 14). \AJuò
(I.24b)+'c;
!&
2) Méthode de RAYLEIGH-RITZ associée à la formulation variationnelle
C'est une méthode énergétique basée sur le principe de moindre action. Les fonctions
i (P) "admissibles" c'est-à-dire une fois différentiables et ne satisfaisant qu'aux conditions aux
limites cinématiques constituent les fonctions d'essai (P) . On a donc un choix plus large
de ces fonctions que dans le cas des "fonctions compatibles" (deux fois différentiables) dans la
méthode différentielle.
L'énergie cinétique Ec. de la structure s'exprime sous une forme quadratique des
dérivées des coordonnées généralisées.
Elle s'écrit:
12
D'après l'expression de I..'- ( ï. - ) , on obtient
-' '-(1.26) -
+ '> ,ou - -o Il vient donc
L'énergie cinétique s'écrit alors
(1.28) E c ( íen posant
(1.29) M ¿
( Pd
(1.25) f (eî'
(1.27) ¿'t ti (2) (t)
l'énergie cinétique devient
(1.30)-
13
L ri) = L ) s'appelle matrice de masse de la structure. Cette matrice est
symétrique, définie positive car l'énergie cinétique est toujours une grandeur positive.
Cette forme particulière de la solution u ' >. cj peut être interprétée
comme une équation holonome. La structure discrète ass'b'ée est donc plus raide qu la
structure réelle.
Les fonctions peuvent ne vérifier que les conditions de déplacement car il suffit
qu'elles engendrent un champ de déplacement cinématiquement admissible.
Les équations du mouvement s'obtiennent en utilisant les équations de LAGRANGE
déduites de l'expression (1.15)
d (L\(1.31)
où A- désigne la force généralisée de volume.
(1.32) 1 F. L (2) Ñ 1
Dans l'hypothèse de l'élasticité linéaire, la fonction potentielle "Tà () ') peut être
approchée par son développement de MAC-LAURIN au second ordre.
Si nous choisissons l'origine des coordonnées généralisées (X telle que Vi (o)est nul, et si nous remarquons que la position d'équilibre en o doit être nécessairement un
minimum du potentiel , c'est -à-dire:
(o) = 6 t.1\(1.33) p
alors le développement de MAC-LAURIN devient\r(1.34)
Ç
En posant
/(1.35) 6 (o')
qui correspond à la l'Elastiché Linéaire.

(1.39) Çt
pour toutes les fonctions et ¿ qui satisfont à toutes les conditions aux limites.
3) L'intérêt d'une base modale
La mesure des déplacements de points à la surface de la structure est nécessaire dans un
contexte d'analyse expérimentale. La détermination des matrices de masse et de rigidité utilise
les modes de vibration pour deux raisons majeures:
* l'amplification dynamique facilite la mesure des déformées modales
* les phénomènes de résonance mettent en évidence l'influence des paramètres
dynamiques.
Des difficultés expérimentales induisent des systèmes matriciels souvent malconditionnés. On remédie à cet inconvénient en utilisant une formulation de type"RAYLEIGH-RITZ" avec pour fonctions de base les modes de vibration ou des déformées
expériementales qui s'en approchent.
14
On défmit une matrice < Ç,, 'c' appelée matrice de raideur. La matrice
est symétrique, définie positive si la frontière n'est pas réduite à l'ensemble vide,
semi-définie positive si c'est le cas car o correspond à des mouvements de corps
rigides.
Les équations de LAGRANGE peuvent alors s'exprimer sous une forme matricielle
(1.36) t'h\\+ 'c'\
La transformée de FOURIER de cette équation donne
(1.37) =
Dans le cas d'un système isolé, et en utilisant les mêmes fonctions de base, on obtient un
système identique à celui trouvé par la méthode de GALERKIN. Soit:
(1.38) Çy(')
De cette équivalence découle le caractère auto-adjoint de l'opérateur K dans la
formulation différentielle pour un système isolé.
(I.41.a)
(1.41 .b)
15
Les coordonnées généralisées sont alors les participations des modes à la réponse.Cette
base modale génère la réponse reelle. Mais l'on doit se limiter à un nombre fini de modes.
Elle reste néanmoins très représentative de la déformabilité de la structure dans un certain
domaine de fréquence.
En vue d'étudier les diverses possibilités permettant d'obtenir les paramètres modaux, il
s'avère indispensable d'exprimer la réponse d'une structure en fonction de ses modes et d'éviter
les erreurs introduites par la prise en compte que d'un nombre fini d'entre eux.
4) Equations de changement de hase
La méthode de RAYLEIGH-RITZ est très avantageuse car elle permet de raccorder des
sous-structures en imposant des conditions cinématiques sur les variables généralisées. La
sommation des énergies cinétique et élastique de chaque sous-structure donne respectivement les
énergies cinétique et élastique de l'assemblage total.
L'écriture des équations de LAGRANGE exprimant l'équilibre de la structure entière ne
nécessite que l'utilisation d'un param&rage strict, c'est-à-dire qui tient compte de toutes les
conditions cinématiques de liaison.
Soit ) le vecteur des nouvelles coordonnées, le changement de base est traduit par
l'équation suivante:
(1.40) = )
où [f ) est la matrice de passage de la base des Eléments Finis à la base modale.
Comme les énergies cinétiques et élastiques sont invariantes par changement de base, les
nouvelles matrices de masse et de rigidité s'écrivent en fonction des anciennes:
1.3 ANALYSE MODALE
1) Définition des modes normaux
Les modes normaux sont solutions du système conservatif
(1.42) X )C

où est le vecteur propre ou le mode et c...) la pulsation associée à c- . Le spectre
de l'opérateur K est de dimension infinie. Toutes les solutions propres doivent vérifier
les conditions aux limites.
Comme la structure est supposée isolée, les opérateurs K et Ii. sont auto-adjoints.
On en déduit les relations d'orthogonalité des solutions propres
(I.43a) Ç :ci:, =
(I.43b) (
rry\. est la masse modale de rang i. Elle est nécessairement positive car . est un
opérateur défini positif. est la raideur modale de rang i. Elle est positive ou nulle car
l'opérateur K est semi-défmi positif.Afm de simplifier le calcul, on norme les formes propres Ct en imposant à la masse
modale rn..c d'être égale à l'unité.
44) M. zx) . -
* Cas des modes normaux discrets
La méthode de RAYLEIGH-RITZ permet d'approcher les modes normaux continus par
des modes normaux discrets. Ces modes normaux discrets sont solutions de l'équation aux
valeurs propres
(1.45) C
16
.1c
CQ'
où (ti et ÇV. j sont respectivement les matrices de masse et de raideur de dimension
est le ième mode discret.
Les w. sont solutions de l'équation polynomiale
(1.46)o
L =

L'ordre de multiplicité de la solution cø est la dimension de l'espace propre qui lui est
associé. Le champ de déplacement peut-être ainsi approché grâce aux 1.1 modes discrets
indépendants.(.J
Si x. et LVi. sont les approximations du mode continu - et la pulsation cipropre, on peut écrire:
(1.47)
(I.48b)
(1.50)
(1.51)
(1.52) =
U..2 (:j
zC =i
où est la jième coordonnée du mode discret 'X .
La symétrie des matrices(V et (M" induit l'orthogonalité des modes discrets
Ces relations (I.48a) et (I.48b) confèrent aux déformées modales approchées les
mêmes propriétés de norme et d'orthogonalité que celles des solutions exactes rc.
(I.49.a) t-\
(I.49.b) <' =
2) Ecrimre du mouvement dans la base des modes normaux
Le déplacement U..2 du point 2 s'exprime comme combinaison linéaire de tous les
modes normaux en nombre infini
17
Ç_w i- W
°t) 'c2La transformée de FOURIER de l'équation d'équilibre (1.8) multipliée scalairement par
donne
On en déduit l'expression du champ de déplacement en fonction des modes normaux
-¿I-..w +CVC
(I.48a) =
* Cas des modes normaux discrets
L'écriture dans la base modale à partir du cas discret consiste simplement en unchangement de coordonnées généralisées
(1.53) >.= (_\où (x) est la matrice modale dont les vecteurs colonnes sont constitués des i.r modes
discrets écrits dans l'ancienne base. L'orthogonalité des modes permet d'obtenir l'équation
matricielle
La matrice spectrale C_il 3 est diagonale:
(1.55) _n_ = a
ett-L
sont reliés par:
(1.56) X- w+ CAJ«
* Avantage d'une discrétisation à l'aide des modes normaux
Les modes normaux mettent en évidence le découplage entre les masses, et sont donc
significatifs du nombre de degré de liberté à prendre en compte. Si l'analyse de la réponse de la
structure s'effectue à l'intérieur d'une bande de fréquence donnée, les déformées modales dont
les pulsations se situent dans cette intervalle apparaissent comme une base de plus faible
dimension.
Cette qualité jointe à la propriété de fermeture découlant des relations d'orthogonalité
explique tout l'intérêt de l'utilisation de la base modale dans les essais numériques et les
techniques de sous-structure.
3) Modes particuliers
18
L'Analyse Modale repose principalement sur les modes normaux. Elle utilise également
des modes particuliers. La terminologie classiquement adoptée est la suivante.
(1.54) (_ (r) C 4L 3..) = (X T-
(1.61)
19
a) Modes statiques
Ils sont issus d'un problème statique. Ce sont les déplacements des points d'unestrcture, obtenus statiquement en imposant des conditions particulières aux degrés de liberté de
l'interface r0 . On distingue les modes de déformation statique et les modes d'attache.
* Modes de déformation statique
On impose un déplacement unitaire à l'un des noeuds de l'interface en bloquant les
autres. On n'applique des forces que le long de la frontière t' . On doit donc résoudre le
système suivant:
X1F 1t o
(1.57)
I..
'1<c '(FFJ Li
I désigne les degrés de liberté non concernés par la liaison et F désigne les points de
liaison.
La résolution de l'équation matricielle (1.57) conduit à
(1.58) tt "(i: F =
ou encore
(1.59) X i = - V r r .< t
Les modes de déformation statique sont représentés par la matrice
-1(1.60)
9) r Ki ç.
II y a autant de modes de déformation statique que de degré de liberté de frontière.
* Modes d'attache
Si au lieu d'imposer un déplacement on impose une force unitaire, on obtient des modes
appelés modes d'attache, solutions du système matriciel suivant:
X1
Fc I
20
Ce système n'est possible que si la matrice de rigidité t<) est inversible, c'est-à-dire
si la structure ne possède pas de modes de corps rigides. C'est le cas où on ne peut définir la
matrice de flexibilité statique de la structure (ANNEXE 2).
Cette matrice de flexibilité statique n'existe pas dans le cas des structures entièrement
libres, qui possèdent justement des modes de corps rigides. Ceux-ci induisent une singularité
d'ordre variant de un à six de la matrice ( ) . On utilise alors une procédure particulière,
voir ANNEXE 2, qui conduit à définir une matrice de pseudo-flexibilité. Celle-ci est obtenue
grâce à une projection dans l'espace orthogonal des modes de corps rigides au sens du produit
scalaire généré par la matrice de masse Çh) de la structure.
Modes de corps rigides
ils apparaissent dans les structures dites libres ou avec mécanismes. Un structure libre
est une structure qui possède un certain nombre (au maximum 3 pour les problèmes pians, 6
pour les problèmes tridimensionnels) de modes de mouvement d'ensemble ou modes rigides à
énergie de déformation nulle correspondant à des valeurs propres nulles.
Si X est un mode de corps rigide, alors:
(1.62) A = VcLO
On en déduit la propriété suivante des modes d'ensemble
(1.63) K R. =
Dans les méthodes d'analyse modale, ii est souvent intéressant de considérer desmodèles définis par des sous-structures libres. Mais l'une des difficultés, surtout numériques,
est de s'affranchir des singularités induites par la présence des modes de corps rigides. Tout le
long de cette étude, l'on sera amené à envisager des procédures spéciales partout où l'influence
des modes de corps rigides sera prise en compte.
Modes dynamiques
Les modes dynamiques ou modes propres d'une structure sont les solutions du système
matriciel
(1.64) ) X + ÇtI S = o
21
On distingue plusieurs types de modes propres suivant les conditions imposées sur
l'interface de raccordement P0
* Modes libres
Ce sont les modes calculés en supposant la sous-structure libre le long de l'interface de
raccordement r0
* Modes encastrés
Ce sont les modes obtenus en bloquant les noeuds de la frontière ['v
* Modes chargés
Ils sont obtenus en affectant aux noeuds de l'interface r0 des inpédances connues
pouvant se rapprocher du comportement des sous-structures adjacentes.
4) Exemple d'un modèle Eléments Finis de sous-structure
Il est intéressant d'illustrer ces différents types de modes sur la base d'un modèle
Eléments Finis que nous avons construit et comparé à celui du logiciel ANSYS.
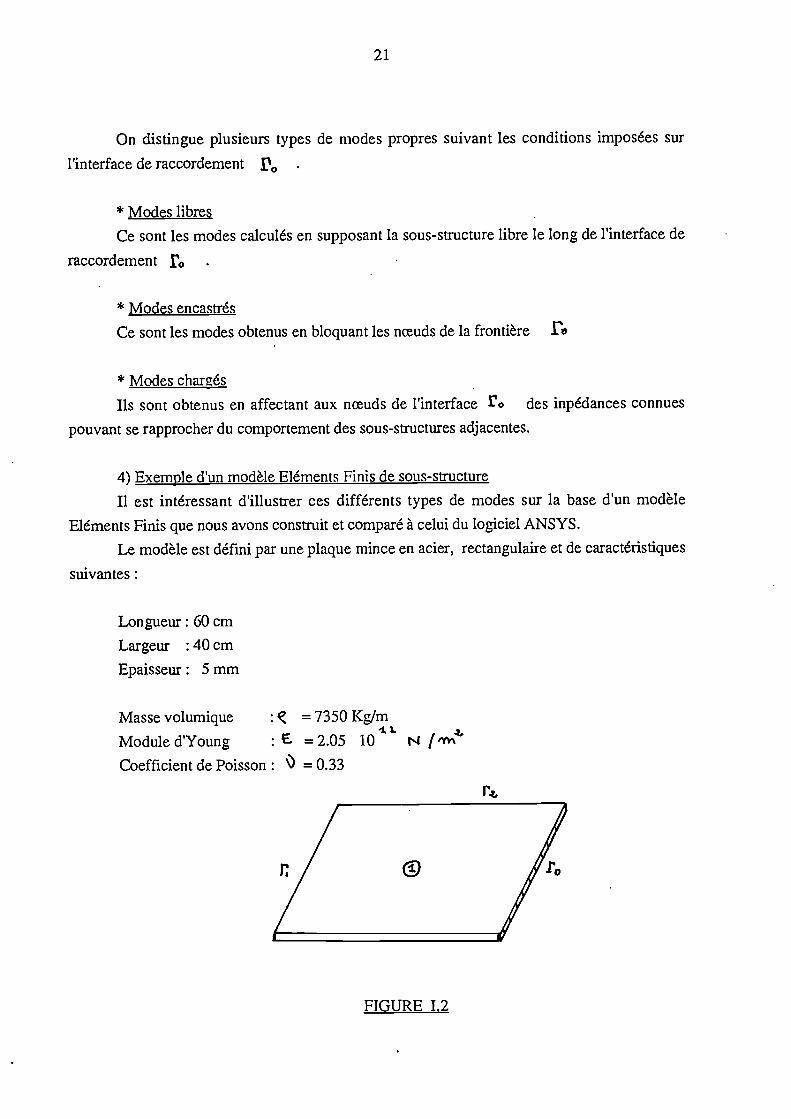
Le modèle est défmi par une plaque mince en acier, rectangulaire et de caractéristiques
suivantes:
Longueur: 60 cm
Largeur : 40 cm
Epaisseur: 5 mm
Masse volumique : = 7350 Kg/rn
Module d'Young : E. = 2.05 10 Ñ
Coefficient de Poisson: = 0.33
FIGURE 1,2
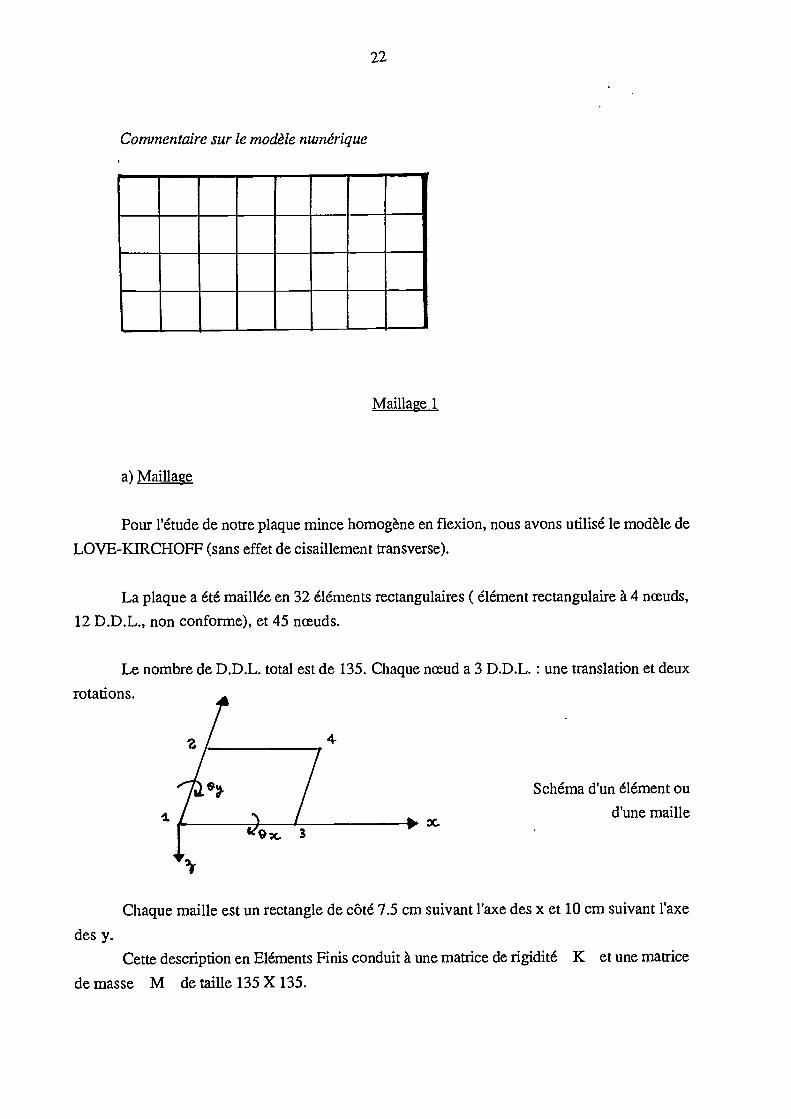
Convnenraire sur le modàle nwnérique
22
Maillage i
a) Maillage
Pour l'étude de notre plaque mince homogène en flexion, nous avons utilisé le modèle de
LOVE-KIRCHOFF (sans effet de cisaillement transverse).
La plaque a été maillée en 32 éléments rectangulaires (élément rectangulaire à 4 noeuds,
12 D.D.L., non conforme), et 45 noeuds.
Le nombre de D.D.L. total est de 135. Chaque noeud a 3 D.D.L. une translation et deux
rotations.
Schéma d'un élément ou
d'une maillez'
Chaque maille est un rectangle de côté 7.5 cm suivant l'axe des x et 10 cm suivant l'axe
des y.Cette description en Eléments Finis conduit à une matrice de rigidité K et une matrice
demasse M detaille 135X135.
23
Dans toute la suite de ce travail, tous les résultats issus de ce code de calcul seront suivis
des sigles M.E.F. (Méthode des Eléments Finis), tandis que D.D.L. désignera Dégré De
Liberté.
Dans une première étape, il a été nécessaire de comparer les fréquences propres issues de
ce cours de calcul à celles obtenues par deux logiciels connus : SAP ( Structure Analysis
Program) et ANSYS (Swanson Analysis Systems Incorporation).
ANSYS et SAP utilisent des éléments finis quadrilatères de coque.
Dans ces deux logiciels, nous avons rentré des maillages identiques au nôtre afin de
permettre la comparaison.
Tableaux des résultats
Tous les tabeaux ont été obtenus avec des problèmes de taille identique pour les
méthodes que nous comparons.
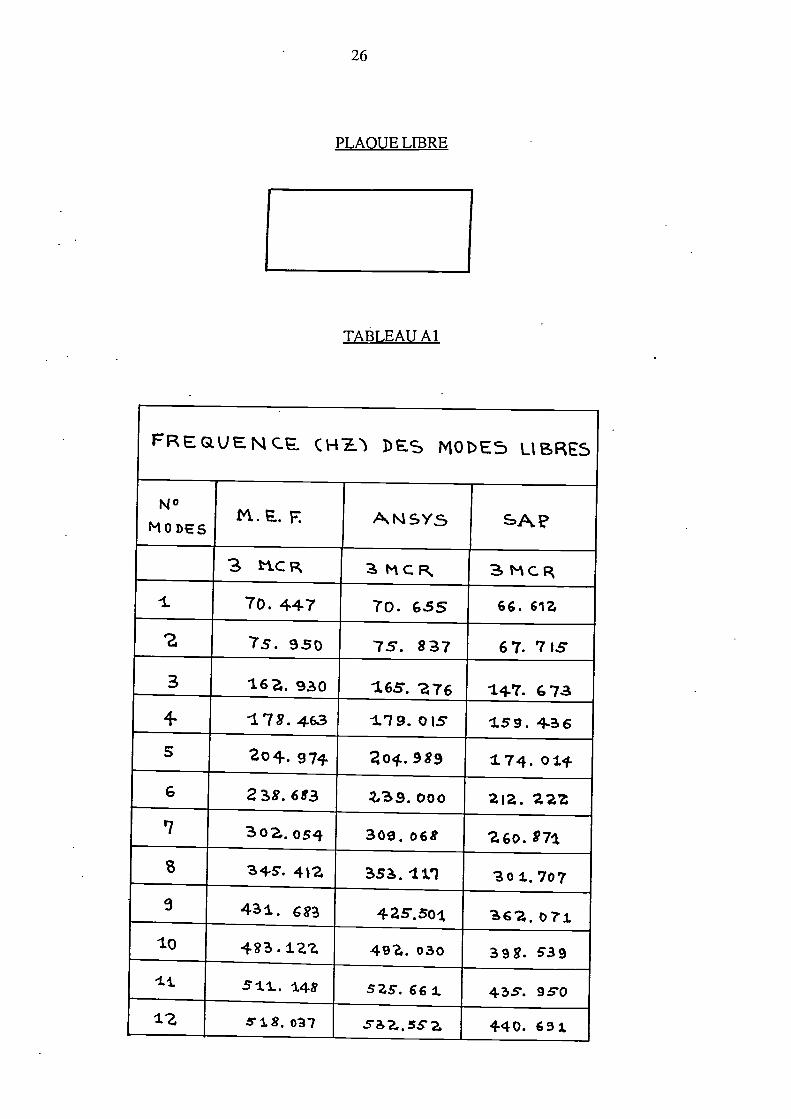
* Tableau Al: taille 135 x 135 (plaque entièrement libre)
* Tableau A2: taille 120 x 120 (plaque encastrée sur une largeur)
* Tableau A3: taille 96 x 96 (plaque bi-encastrée sur deux côtés contigus)
Les graphes
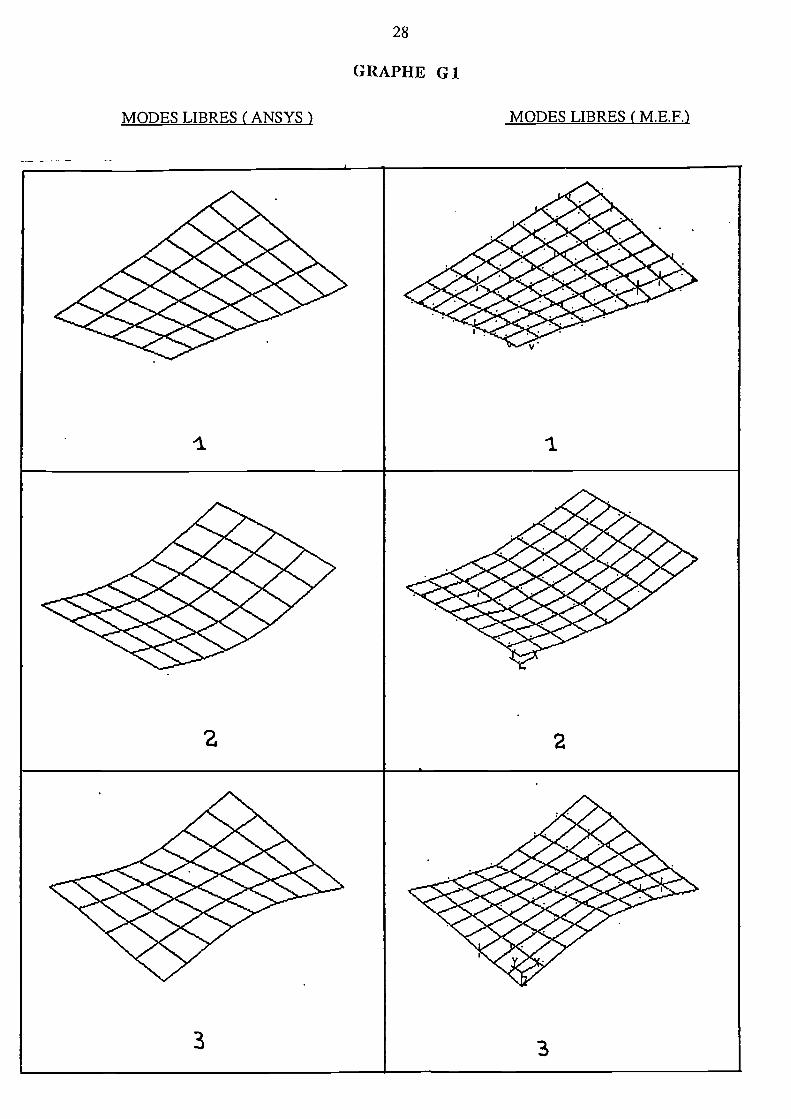
Dans les GRAPHES 1 et 2 Les modes libres ANSYS sont tracés automatiquement avec
45 noeuds. Le maillage utilisé est identique à celui de notre code de calcul M.E.F. Il a 135
D.D.L.
Les modes libres obtenus par notre code M.E.F. et dessinés sur le GRAPHE i et 2 ont
aussi chacun 135 D.D.L. comme notre maillage. Le tracé de ces modes est semi-automatique:
transfert du calcul sur l'ordinateur IBM vers l'ordinateur VAX afin d'utiliser le traceur de
ANSYS implanté sur le VAX.
24
Comme les déformations en chaque noeud du maillage i sont rentréssemi-automatiquement sur le traceur ANSYS, on s'est donc contenté de tenir compte d'un
noeud sur deux dans le sens de la longueur de la plaque, à partir du maillage 1, ce qui donne le
schéma ci-dessous:
e
Dans le tracé définitif ANSYS fait une interpolation linéaire e % définit un point
intermédiaire entre deux noeuds donnés.
On obtient donc en définitive 9 noeuds dans le sens de la largeur et 9 noeuds dans le ses
de la longueur.
Les GRAPHES i et 2 permettent néanmoins une comparaison des formes car les deux
méthodes de calcul utilisent le même maillage initial, MAILLAGE 1, pour le calcul des modes.
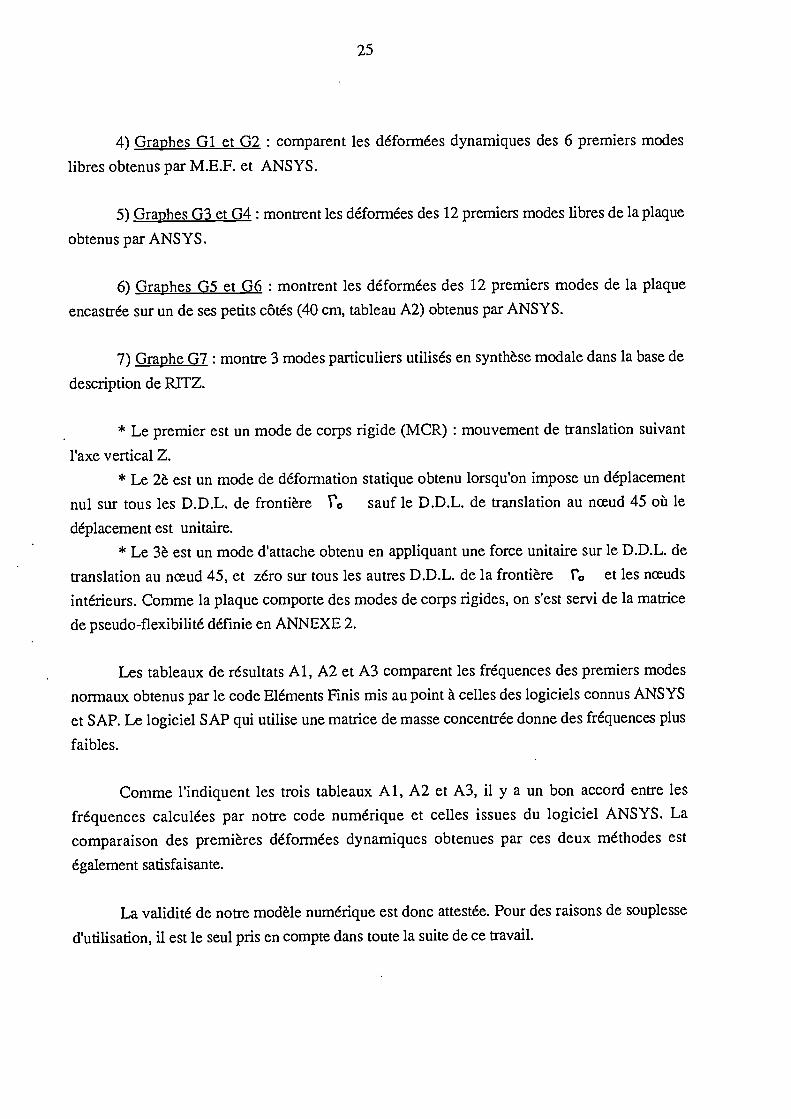
RECAPITULAT1F DES TABLEAUX ET GRAPHES DE LA PARTIE I
Cette partie I est ilustrée par 3 Tableaux de résultats et 7 Graphes
Tableau Al : donne les 12 premières fréquences en HERTZ (HZ) plus les 3 modes de
corps rigides (MCR) de la plaque entièrement libre suivant les 3 calculs différents : notre code de
calcul M.E.F., le logiciel ANSYS et le logiciel SAP.
Tableau A2 : donne les 12 premières fréquences de la plaque encastrée sur un de ses
petits côtés (40 cm) par M.E.F. et ANSYS.
Tableau A3 : donne les 12 premières fréque'nces de la plaque bi-encastrée sur 2 côtés
contigus (60 cm et 40 cm) par M.E.F. et ANSYS.
Mailla ge 2 virtuel
25
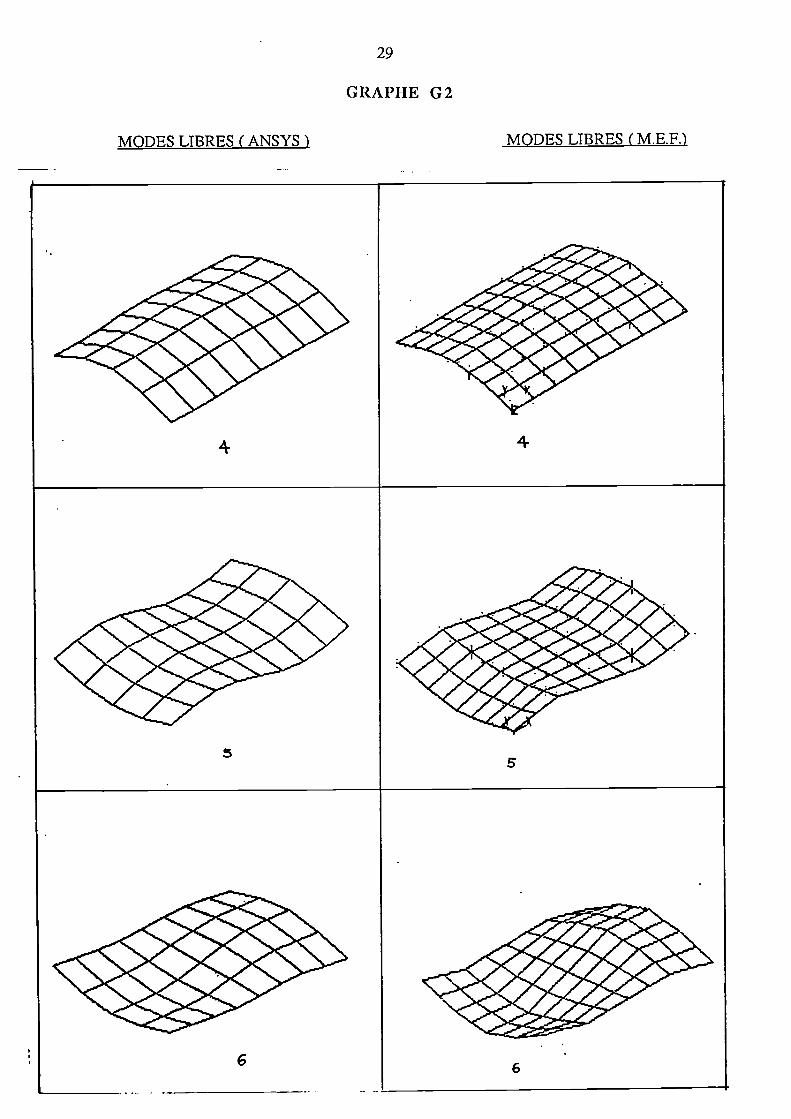
Graphes Gi et G2 comparent les déformées dynamiques des 6 premiers modes
libres obtenus par M.E.F. et ANSYS.
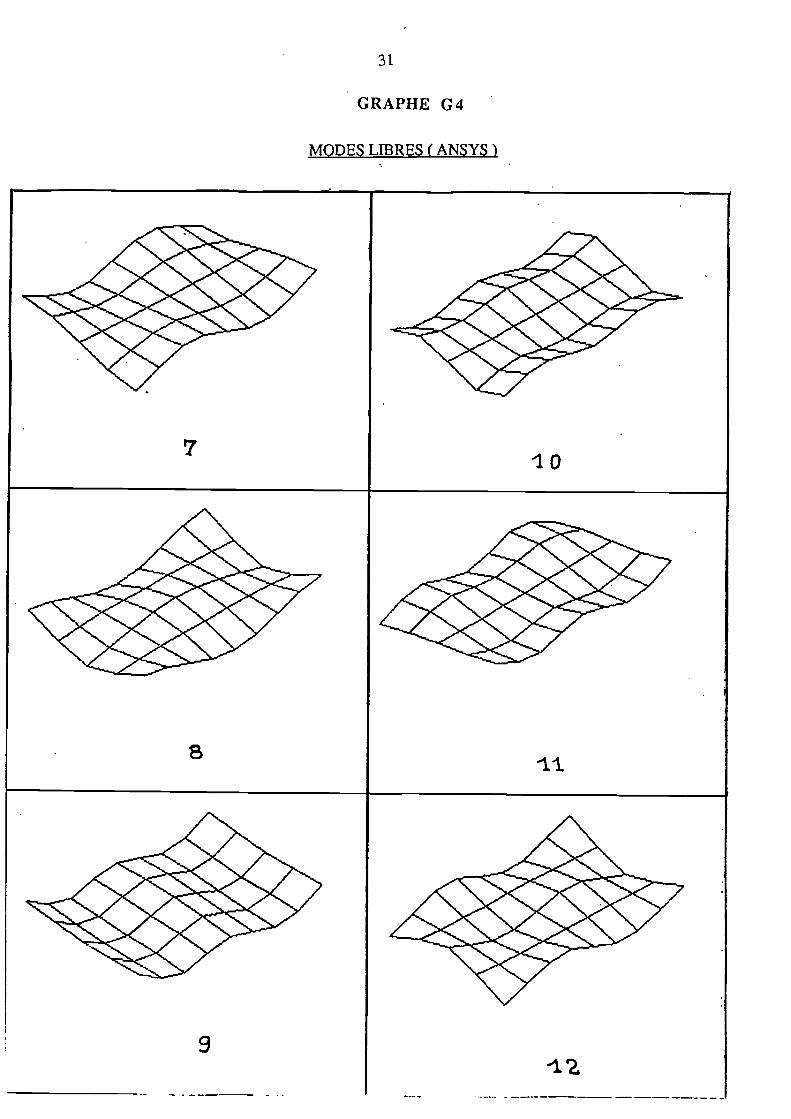
Graphes 03 et G4 : montrent les déformées des 12 premiers modes libres de la plaque
obtenus par ANSYS.
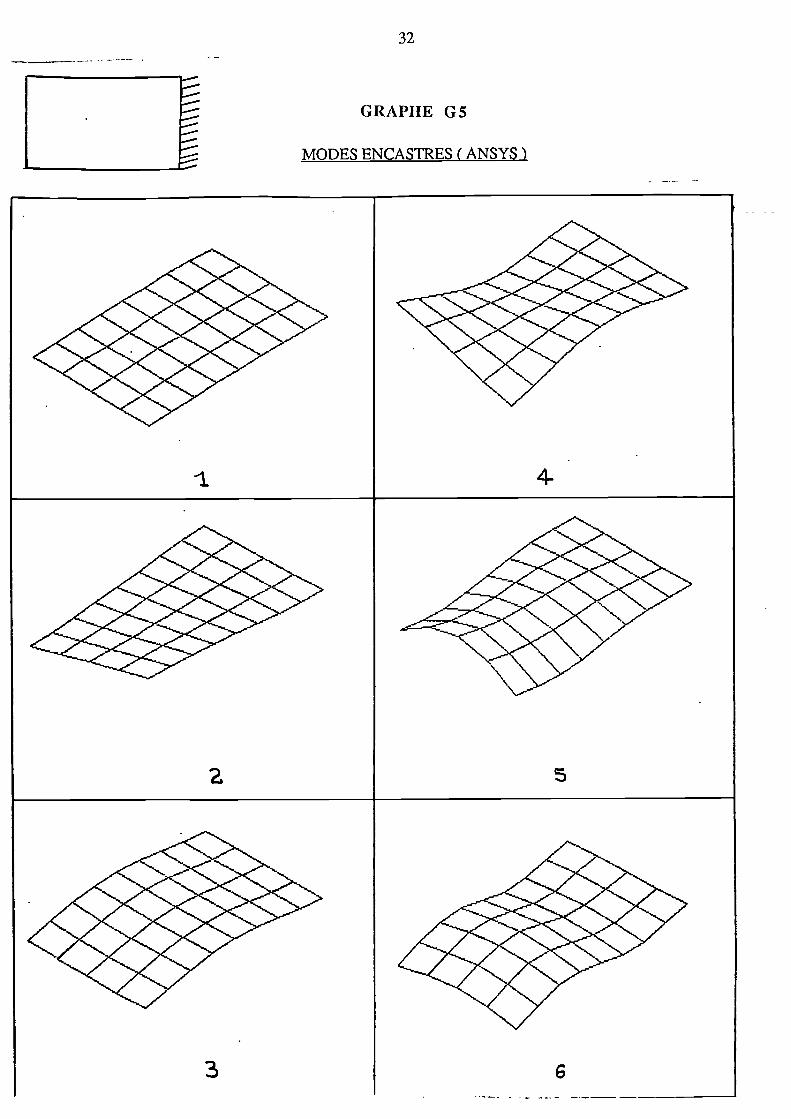
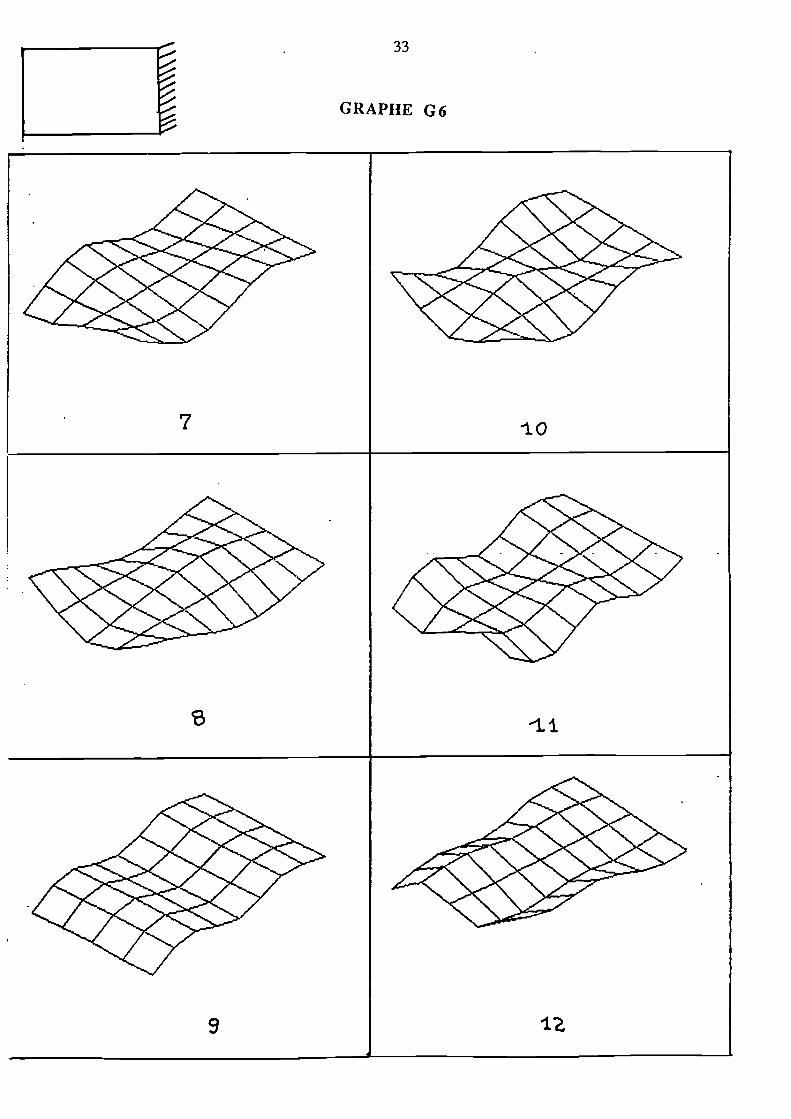
Graphes G5 et G6 : montrent les déformées des 12 premiers modes de la plaque
encastrée sur un de ses petits côtés (40 cm, tableau A2) obtenus par ANSYS.
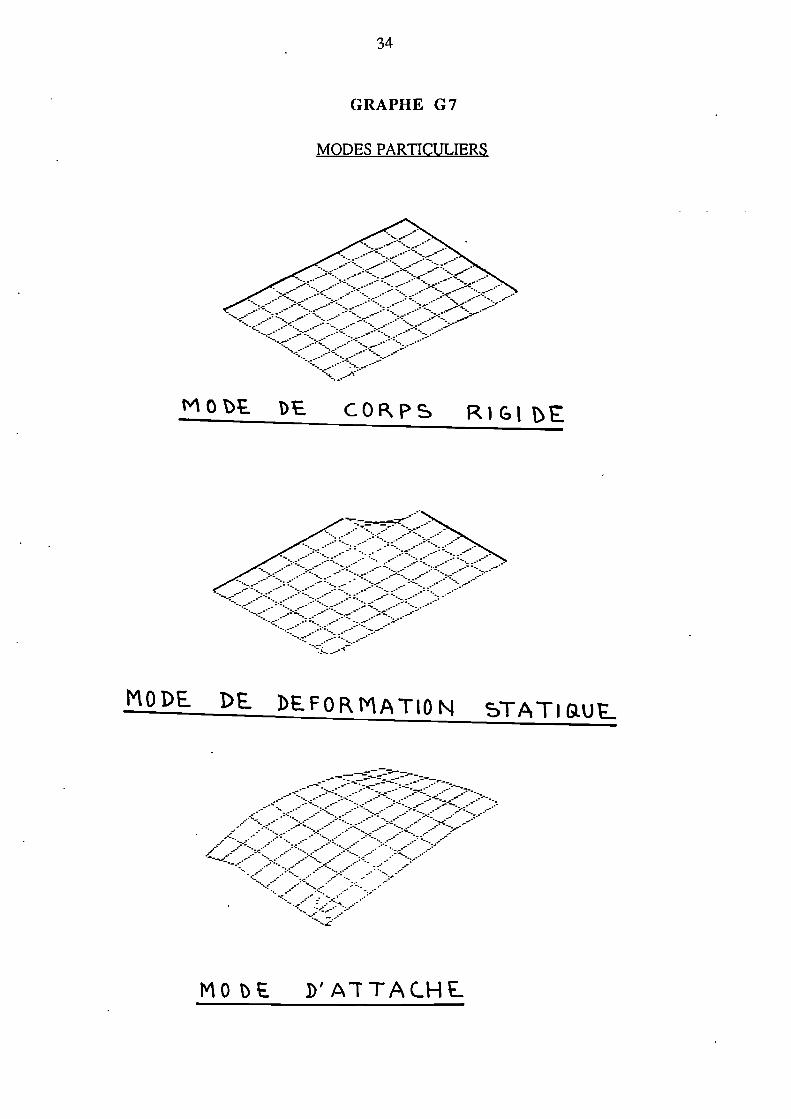
Graphe 07 : montre 3 modes particuliers utilisés en synthèse modale dans la base de
description de RITZ.
* Le premier est un mode de corps rigide (MCR) mouvement de translation suivant
l'axe vertical Z.
* Le 2è est un mode de déformation statique obtenu lorsqu'on impose un déplacement
nul sur tous les D.D.L. de frontière r0 sauf le D.D.L. de translation au noeud 45 où le
déplacement est unitaire.* Le 3è est un mode d'attache obtenu en appliquant une force unitaire sur le D.D.L. de
translation au noeud 45, et zéro sur tous les autres D.D.L. de la frontière r0 et les noeuds
intérieurs. Comme la plaque comporte des modes de corps rigides, on s'est servi de la matrice
de pseudo-flexibilité définie en ANNEXE 2.
Les tableaux de résultats Al, A2 et A3 comparent les fréquences des premiers modes
normaux obtenus par le code Eléments Finis mis au point à celles des logiciels connus ANSYS
et SAP. Le logiciel SAP qui utilise une matrice de masse concentrée donne des fréquences plus
faibles.
Comme l'indiquent les trois tableaux Al, A2 et A3, il y a un bon accord entre lesfréquences calculées par notre code numérique et celles issues du logiciel ANSYS. Lacomparaison des premières déformées dynamiques obtenues par ces deux méthodes est
également satisfaisante.
La validité de notre modèle numérique est donc attestée. Pour des raisons de souplesse
d'utilisation, il est le seul pris en compte dans toute la suite de ce travail.
26
PLAOUE LIBRE
TABLEAU Al
FRQ.UENC (H S MODE5 UBRES
N°Mo bES
M...F. ASY3
3 3MC
70. 447 10. 6.55 6. 612,
2 7s. 9sr is 837 67. 715
3 16. 930 1.65. 76 1.47. 67.3
4 l7.463 1.'79.0I3 lS9.465 204.974 o4.989 174.014G 683 V39.00o 212. 22rl
30Z.054 30ß.06S
8 45.4 301.7o7
431. 3 425.5oj OTj.
43.1Z?. 49?.. 030 39S. 539
1.t Sit. 14 5Z. 6 i. 45. 95012, stQ.o7 S?..5S2, 440. 6i.
I I
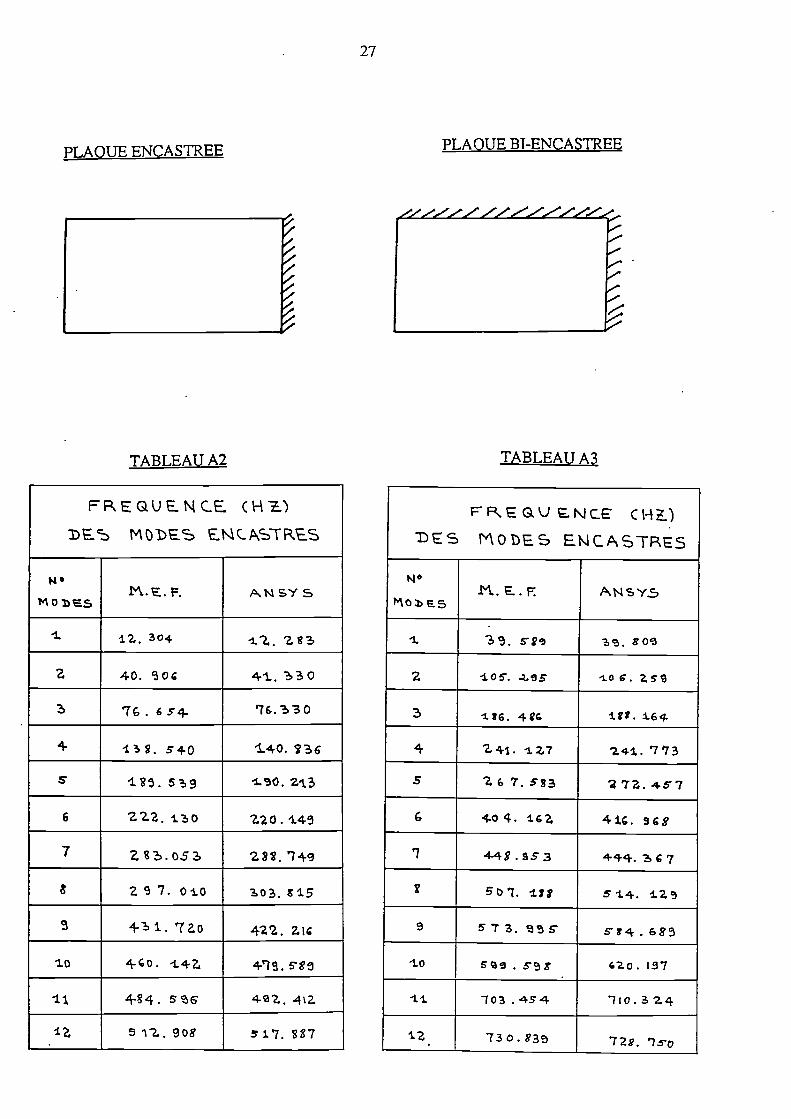
TABLEAU A2
27
PLAQUE ENCASTREE PLA QUE BT-ENCASTREE
TABLEAUA3
FREQUENCE (Hr)DE MOLES E TRES
N'A BY S
i2.. 304 t2 za
Z 40. 90G 4t.330
3 'T.6..c4 '16.330
4 i. 540 t4O.3G
s 1..O.Z13
6 222.1.30 220.1.49
7 Z3.o52
297.01.0 O3.i5
431..7ao 422..Zi
10 4-0. -t42,
-11 44. 4-Z. .4t2.
512. 908 i.7. 7
FRQ.'JNCE Ct4.)DES NOtES ENCASTRES
NO
Mo. .sAt4SY3
t 3 '3. % 80
2 i05. g -10E. sg
3 -t!6 4 it:. 1.64.
4 2.4. 1Z7 241.. '773
5 267.533 72.457
4.04. i2 4ta. 9G8
fi 44$'.53 444.,G7
5o7. 1.:: 51.4. 1.29
9 r3 9S 54.689-Lo . 620. 137
1.1. 703.454
730. 839 72:.
28
GRAPHE G!
MODES LIBRES (ANSYS) MODES LIBRES (M.E.F.)
Ø44
-1
#444*.
i
Il_4
'z 2
3
fr04
3
29
GRAPHE G2
MODES LIBRES (ANSYS) MODES LIBRES (M.E.F.)
4$4
G 6
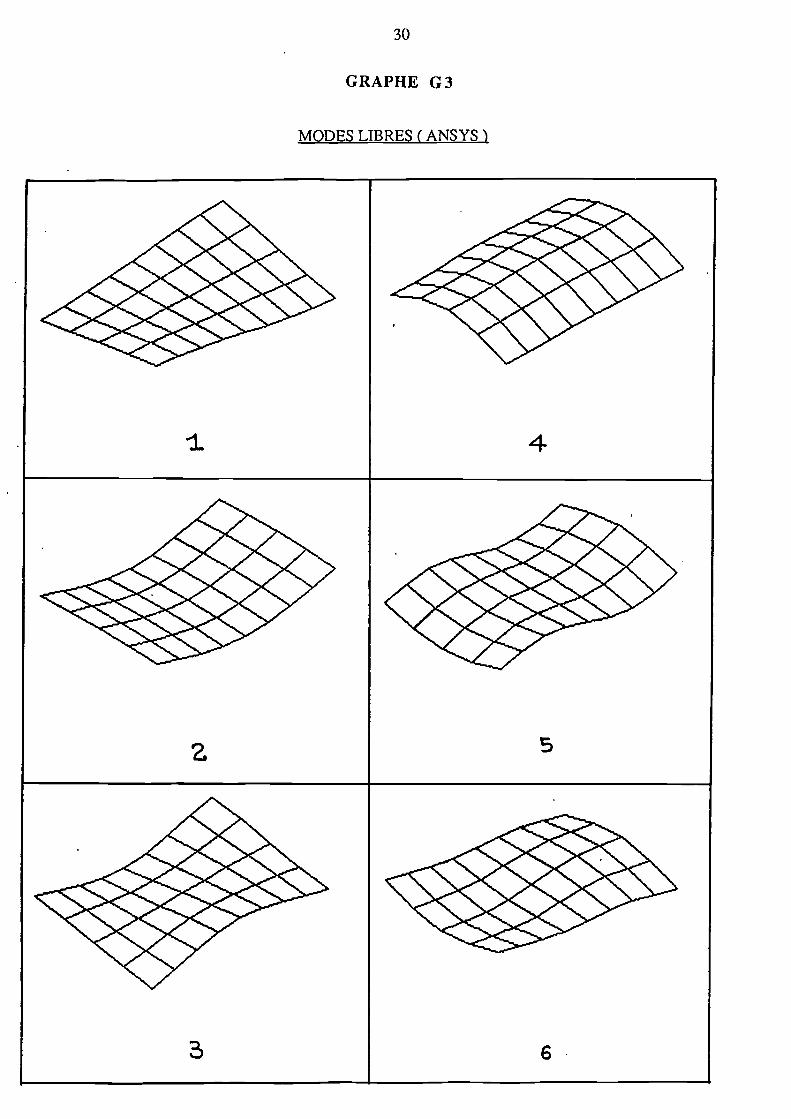
30
GRAPHE G3
MODES LIBRES (ANSYS '
t
2.
3
4
5
6
31
GRAPHE G4
MODES LIBRES (ANSYS)
32
GRAPHE G5
MODES ENCASTRES (ANSYS )
33
GRAPHE G6
34
GRAPHE G7
MODES PARTICULIERS
CORPS R1GIt
MODE DE BEFOR1ATION sTATiau
C. -;.c.
S -
MOt D'ATTACHE
35
1.4 INTERET D'UNE FORMULATION GENERALE DE L'EOUILIBREDYNAMIQUE
Les deux formulations différentielles et variationnelles présentées dans cette partieconduisent à des équations d'équilibre exprimées en variables continues et en variables discrètes
grâce à la méthode des Eléments Finis.
Dans cette démarche, l'usage des tenseurs des contraintes, des déformations ou del'énergie de déformation, quoique dûment justifié, est de nature à spécifier la géométrie et le
matériau constitutif de la sous-structure. Les résultats atteints deviennent donc particuliers.
Or les équations aux dérivées partielles de la Dynamique des structures, si diverses
soient-elles, peuvent être englobées pour les plus classiques d'entre elles, en une classe unique
de problèmes régis par des opérateurs différentiels linéaires d'ordre supérieur ou égal à 2.
C'est donc l'étude des propriétés des opérateurs linéaires qui régissent les équilibres, qui
définira chaque cadre d'utilisation adapté à un problème particulier de la Dynamique des
structures.
Par conséquent, les conditions aux limites jusqu'alors séparées entre les "conditions
statiques" et les "conditions cinématiques" vont s'unifier afin de permettre une description plus
générale et plus adaptée à la nature réelle des interfaces de raccordement ou interviennent
souvent des conditions hybrides de force et de déplacement.
Les difficultés liées à l'utilisation des deux méthodes classiques de synthèse modale:
* "modes encastrés" où des essais statiques s'avèrent expérimentalement limités
* "modes libres" qui nécessite un grand nombre de modes vont être levées parl'introduction des modèles hybrides de synthèse modale basés sur la prise en compte des modes
de branche obtenus en introduisant des changements le long de la frontière de raccordement. Ces
modes permettent de définir des coordonnées généralisées de frontière bien représentatives de la
déformabilité des frontières dans le domaine fréquentiel considéré.
Le formalisme utilisé devient ainsi général afin d'englober divers problèmes deDynamique des solides et divers types de raccordement d'une structure avec son environnement.
II. PROBLEME SPECTRAL
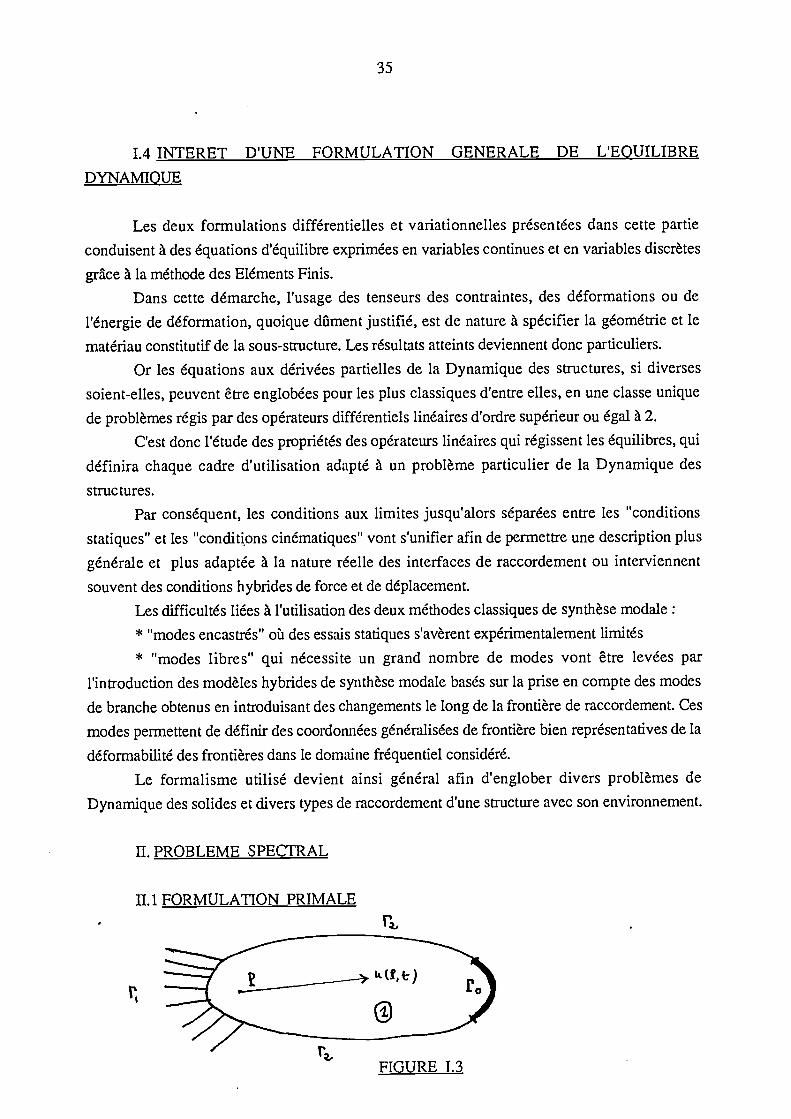
11.1 FORMULATION PRIMALE

36
Isolons de l'assemblage présenté en Figure (1.1) la sous-structure c supposée
élastique et occupant un domaine de .IF . Dans le cas des vibrations harmoniques,
en l'absence de forces extérieures de volume, son déplacement tt vérifie l'équation
d'équilibre suivante:
(1.65) .. W
3I( est un opérateur elliptique de degré 2m et une fonction scalaire strictement
positive.
A chaque point de la frontière i: , oìi r t0 r U sont associés
couples de conditions aux limites représentées par deux familles d'opérateurs de frontière* les opérateurs ., B . , m. ,d'ordre j, ¿ C.° , ' .«.t . Ils
correspondent aux conditions cinématiques sur '* les opérateurs .k Ce.. A.
3. .. ., d'ordres , C. -
correspondeent aux conditions naturelles et font intervenir des dérivées normales à la frontière
et le long de la frontière.
Les conditions aux limites suivantes sont ajointes à l'équation (1.65)
(I.66.a)
(I.66.b)
(I.66.c)
vr0
Les opérateurs de frontière C. A } sont adjoints par rapport à l'opérateur K
et à cette formule de GREEN du système .( ¿3.
(1.67) .. (u, iv-) = - J Cc ")roù .. ) est une forme biinéaire liée à l'énergie élastique tandis que Ç. , )
représente le produit scalaire associé aux fonctions définies le long de la frontière r et
de carré intégrable.
On simplifie le second membre de l'équation (1.67) en introduisant le produit scalaire
formel <s , > sur la frontière [fl%
(1.68) Çc r0
La formule de GREEN devient alors:
(1.69) -. (u. 4.rj .. t\.r) 4 < AT'>
L'opérateur A permet de déterminer les contraintes à partir des déplacements et vérifie
en particulier l'équation énergétique suivante:
(1.70) (StA,
37
Au, A&rJ
où c. (. , est la forme bilinéaire liée à l'énergie de déformation exprimée en
fonction des contraintes.
II convient de s'intéresser d'abord à l'espace des solutions de l'équation spectrale (1.65)
1) Espaces des champs de déplacement
Notons l'espace des fonctions LA qui vérifient les conditions cinématiques sur
la frontière t , et complété par le produit scalaire , .3(1.71) ç
où est le produit scalaire associé à l'énergie cinétique.
On définit alors le domaine de l'opérateur ]#( comme suit:
rl'
(1.72) b k.- \ A. .
Pour pouvoir appliquer ces méthodes aux problèmes dynamiques associés à desopérateurs d'inertie diférentiels, on introduit l'espace engendré par le produit scalaire
. Comme Ç est une fonction scalaire, est identifié à son dual et on obtient les
inclusions:
(1.73) L
où est un espace de forces dual de l'espace L
sens du produit scalaire
(1.75)
(I.76.a)
(I.76.b)
38
On introduit l'espace ' , sous-espace de L et défini par:
E est un sous-espace complet, fermé par le produit scalaire .- ( s
Si la frontière r. est réduite à l'ensemble vide, la sous-structure considérée peut
comporter des modes de corps rigides.
Soit donc l'espace des modes de corps rigides, c'est-à-dire le champ des
déplacements qui n'induisent aucune contrainte. On note l'espace orthogonal de au
Pour tenir compte de l'influence éventuelle des modes de corps rigides, on introduit les
espaces suivants:
£L r1R.
Dans ces deux nouveaux espaces et , l'énergie de déformation qui était une
forme bilinéaire Çz.. C' , ) dans ' L et devient un produit scalaire. La norme
qu'elle y engendre est équivalente à celle liée au produit scalaire (e ..)
Les inégalités de KORN et de POINCARE permettent d'identifier les espaces L et
taux espaces de HILBERT classiques en Dynamique des structures.
Afin d'appliquer ces formulations continues à des modèles expérimentaux réels, il est
intéressant de discrétiser l'espace des solutions.
(1.74) =1 t.4tA %L2El0 ß.u.=o
2) Schéma de discrétisation
On considère le déplacement u.. comme étant une somme pondérée de .t..T fonctions de
base .
(1.77) A- ' X1 (t) (+)
où les XW sont des déplacements généralisés ne dépendant que du temps.
Les fonctions c satisfont toutes les conditions de régularité (déplacements) sur la
frontière r de , où t . L'espace des fonctions IA solutions est donc
La discrétisation de l'équation énergétique (1.69) consiste à trouver des fonctions
pour qu'elle soit vérifiée au mieux.
où est une fonction d'erreur qu'on minimisera par un choix judicieux des À , et
oùsi
N
'>', s ):
(1.79)
La méthode consiste à annuler l'intégrale sur tout le volume de cette erreur
pondérée par une famille de fonctions Ç vérifiant l'équation (1.19), soit:
(1.80) -'t, N
En posant
(1.81) "I >
39
(1.78) - Ç(c 'xci')<."'H-E
11.1
40
la force généralisée de frontière, le système (1.80) peut s'écrire matriciellement
(1.82) C 1K) > - Wd Ç tA' > e'-
avec
(1.83) = % (ch, 4'ì\
Ç M \ et (ì'( ) sont deux matrices carrées d'ordre w x N appelées respectivement
matrice de masse et matrice de rigidité de la sous-structure. (II) est une matrice symétrique à
cause du produit scalaire (t'-, ) , et () l'est aussi car l'opérateur K est auto-adjoint,
la structure étant isolée.
3) Identification des espaces de fonctions
Par souci de simplification de l'écriture, nous conservons les mêmes notations dans les
deux formulations continue et discrète pour désigner les espaces de fonctions.
La forme bilmé aire (&. (.. ') et les deux produits scalaires j (i ') et C (' /
sont également appelés ainsi en formulation discrète.
L'espace est engendré par le produit scalaire (ç ., .conserve la
même définition qu'en variables continues et vérifie l'équation
(1.85)
L'espace 'L est engendré par le produit scalaire . Nous notons
(I.86a) ( X) y) E
(I. 86b)
(I.86c) - Çx, y) + V-)csYt
(1.84) = c
41
On définit l'espace 'E de façon similaire L dans le cas où l'interface de
raccordement X, est bloquée. On rattache naturellement L et E les sous-espaces
et
r- L(I.87a) = SR..
(I.87b) .ç'
Les espaces fonctionnels identifiés en Eléments Finis sont de dimension finie et
constituent des approximations suffisantes dans le cadre des modèles expérimentaux classiques
de la Dynamique des structures.
4) Définition des modes normaux
Les modes libres sont solutions propres du problème spectral
(L88a) K
Sì A LL -
Ba =0
ca AL=0 V2 r,..
Les modes libres sont aussi solutions faibles de l'équation
(1.89) & Ç = (Ç U
Ces modes libres vérifient les propriétés d'orthogonalité
(L90a) =
(I.90b) Ç x. L X
(I. 88b)
(I.88c)
(I. 88d)

(I.91b)
II vérifient ensuite l'équation
(I.95a)
(I.95b)
11.2 FORMULATION DUALE
42
Les modes encastrés suivent une définition similaire. Ils sont d'abord solutions du
système:
(I.91a) K )( E C '
(1.92) ÇEC, '-- cJ Ç >Et1 t E t E.
et les propriétés d'orthogonalité
(1.93 a) C. x«ñ ci
.2
(I.93b) = WE
* Cas des modes normaux discrets
Les modes normaux discrets sont solutions de l'équation matricielle
(1.94) X. C Ç
ils vérifient l'orthogonalité par rapport aux matrices (j. et
Cxc,wa
D'une manière symétrique à la description en déplacement, il convient de formuler le
problème spectral par une présentation en force.
B=0(L91c)
(11.97)
43
La décomposition cannonique de l'opérateur X donne
(1.96) A' A.Cette égalité induit l'équation
Comme la contrainte au point 2 s'écrit:
(1.98) = A -l'équation (11.97) devient alors
(1.99) =
ou encore
&(1.100) (Ai V
On multiplie ensuite l'équation (1.100) à gauche par A. . Il vient:
(1.101) A ._ P (r (Aa A A-
Comme AtA. , en posant \... t. - &u.., l'équation (1.101) devient:
(1.102) L cr- r-) r _'çJ
l'équation (1.102) est l'équilibre dynamique en formulation duale où L est unopérateur différentiel d'ordre .
ajoute:
On adjoint à cette équation spectrale les conditions aux limites suivantes:
(I. 103a)
44
(I.103b) C O (W'. Q
(I. 103c)Ve P
Si la distribution des forces de frontière est nulle, on peut montrer que les deux
opérateurs A et A sont adjoints par le produit scalaire c. (. ,
(1.104) c Ç PL , 'r Ç '-i- -
Pcr')
sous l'hypothèse queC vérifie les conditions de force et les conditions cinématiques aux
limites de
Comme en formulation primale, il est intéressant de définir l'espace des solutions de
l'équation spectrale (1.102).
1) Espace des champs de contrainte
On introduit ' , l'espace des fonctions suffisamment différentiables qui vérifient les
conditions de forces nulles le long de la frontière Ç
Comme cette formulation est basée sur les modes encastrés, il convient d'étudier le
problème associé obtenu en imposant des déplacements généralisés . cL le long de
l'interface de raccordement X
On associe à ce problème les conditions aux limites (I.103.a) et (I.103.b) auxquelles on
(1.105) - A r- cL W t ,. r0
la formule de GREEN (1.69) donne en contrainte
(1.106) c.Ç.A Ft* ' (j- A' P)_ <CL, c>
Si on note formellement l'image de l'espace i L par la famille d'opérateurs
.(ß ,, le déplacement généralisé imposé le long de l'interface L, appartient donc à l'espace r0
indu dans les traces de l'espace L associées aux opérateurs . La définition (1.74)
montre que l'espace est le noyau de l'opérateur de trace.
En suivant un formalisme variationnel comparable à celui utilisé en déplacement, on
introduit la forme biinéaire suivante:
(1.107) .QÇr, Ç
Soit l'espace des contraintes obtenu par complétion par le produit scalaire c. C, "3on peut remarquer que cette forme bilinéaire (', ') n'est pas définie dans car
les champs de contrainte statiquement équilibrés l'annulent. On introduit alors l'espace
(1.108)
45
J
JA')
Cet espace s est fermé à l'évidence. C'est l'analogue de l'espace g. des modes
de corps rigides en formulation primale. On note son complémentaire orthogonal au sens
du produit scalaire c. (,) dans l'espace
(1.109) . = ® c L.
Dans l'espace , l'influence des champs de contrainte statiquement
équilibrés est éliminée. La forme bilinéaire e ) y devient un produit scalaire et on
note le complèté de l'espace t par ce produit scalaire.
46
On obtient dans ce nouvel espace complet une formulation faible du problème
spectral associé défini par les conditions aux limites (I. 103.a), (I.103.b) et (1.105)
(1.110)
Afm de permettre une prise en compte des champs de contraintes statiquementéquilibrés
dans les méthodes de synthèse modale, on introduit l'espace , complèté de l'espace
par le produit scalaire 'C ) défini par
(1.111) (s- -7:) e. -i-c. (cr, t)
Comme les normes liées à .e..(., .) et (., ) sont équivalentes dans E
obtient alors:
(1.112) E \
On note L l'espace constitué des fonctions de 'F qui satisfont les conditions de
bord libre le long de l'interface r0 . Soit:
(1.113) 'L e- V- L E, r. C
est donc un sous-espace fermé de
(1.114)
2) Schéma de discrétisation
Pour permettre une utilisation expérimentale de cette description en variables continues, il
convient de discrétiser l'espace des solutions des contraintes de manière similaire à la
formulation en déplacement.
On considère la contrainte comme une somme pondérée de jT fonctions de base
w(1.116) .( C'-' -)
'=1
47
w
c:3-= C) 9'c (f)
où les Ç &) sont des forces généralisées ne dépendant que du temps t.
Les fonctions (' satisfont les conditions de force sur la frontière f de
Une discr&isation analogue à celle utilisée dans l'équation (1.69) donne dans le cas de
l'équation (1.110)
En posant (Ç kf'. , on obtient
(1.117)
+ <L,cW>,C,tIN)
Ce système peut s'écrire matriciellement
(1.118) c r (s) $k? =
est une matrice carrée d'ordre N x N symétrique: e. Ç',4'j)
(s) est une matrice carrée d'ordre NsN symétrique: . Ç_s. )
désigne le déplacement généralisé à la frontière de
3) Identification des espaces de contrainte
Comme en formulation primale, les espaces de contrainte décrits en variables continues
et discrètes conservent les mêmes notations. Chaque espace de HILBERT étant généré par un
produit scalaire, il suffit donc d'identifier ces produits scalaires qui dérivent de l'équilibre
dynamique exprimé en contraintes.
c4)c Ç t'')+<:,::-;>
La forme bilinéaire .. (, ) est identifiée en variables continues et discrètes, tout
comme les deux produits scalaires e) et c (. ,
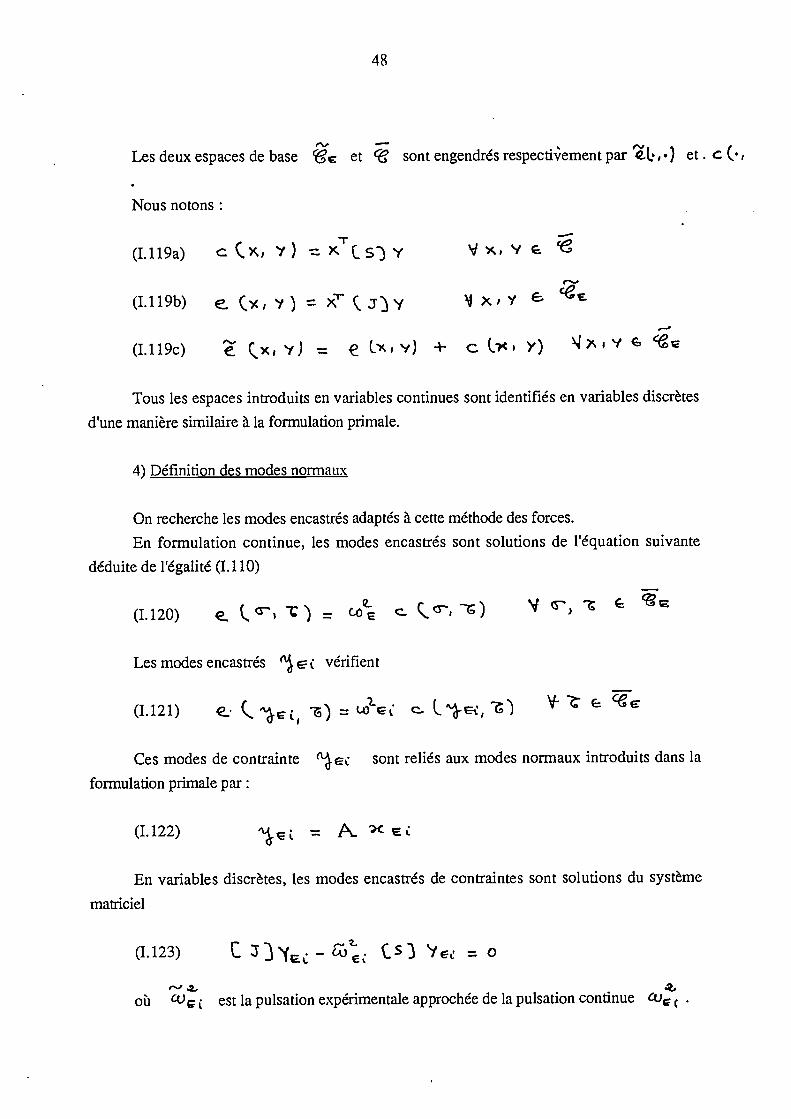
(1.121)
Ces modes de contrainte Sont reliés aux modes normaux introduits dans la
formulation primale par:
(1.122) =
En variables discrètes, les modes encastrés de contraintes sont solutions du système
matriciel
-(1.123) C ) 'I'E - . (s) 'i o
4-
où est la pulsation expérimentale approchée de la pulsation continue
48
Les deux espaces de base et sont engendrés respectiement par '1, ) et. c
Nous notons:
(I.119a) C Ç)c, '/))Çr.)
y
(1.1 19b) . , 'i) c' Ç j y x' Y £
(1.1 19c) (x, ) bcs ) ± c
Tous les espaces introduits en variables continues sont identifiés en variables discrètes
d'une manière similaire à la formulation primale.
4) Définition des modes normaux
On recherche les modes encastrés adaptés à cette méthode des forces.
En formulation continue, les modes encastrés sont solutions de l'équation suivante
déduite de l'égalité (Li 10)
(1.120) Ç Th t ) = c. Ç. T, -)
Les modes encastrés " vérifient
-)u? Li-,)
49
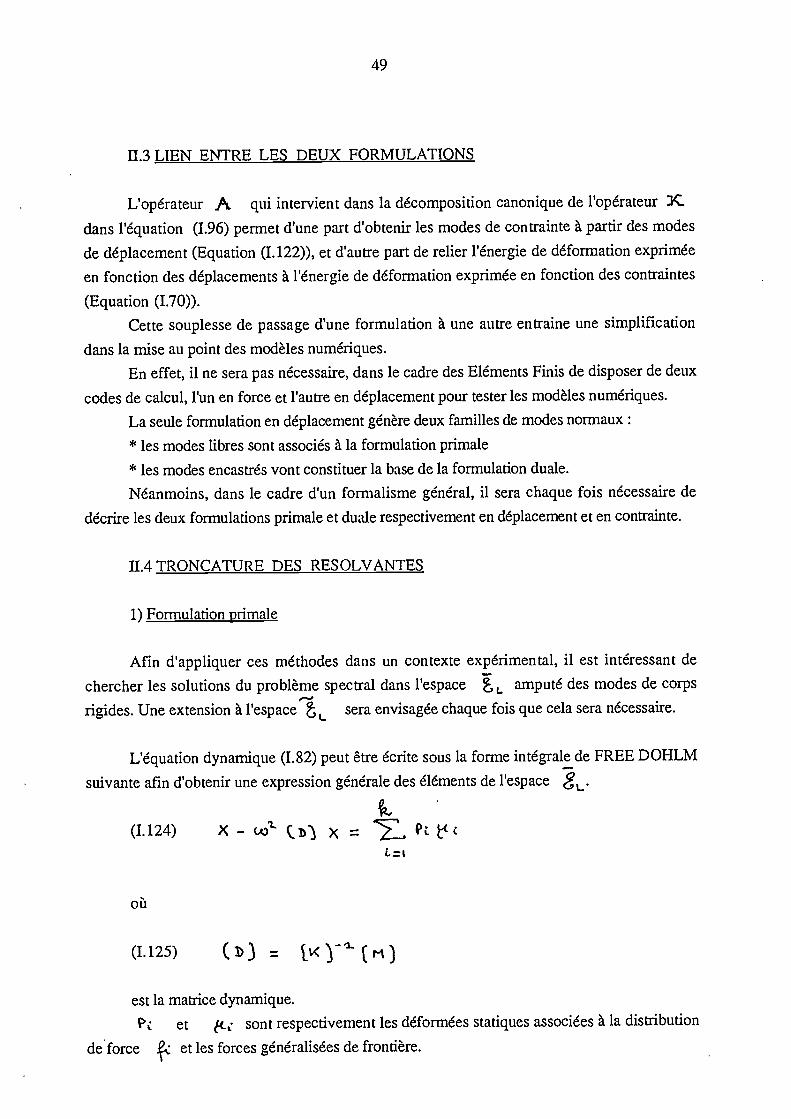
11.3 LIEN ENTRE LES DEUX FORMULATIONS
L'opérateur A qui intervient dans la décomposition canonique de l'opérateur X.dans l'équation (1.96) permet d'une part d'obtenir les modes de contrainte à partir des modes
de déplacement (Equation (1.122)), et d'autre part de relier l'énergie de déformation exprimée
en fonction des déplacements à l'énergie de déformation exprimée en fonction des contraintes
(Equation (1.70)).
Cette souplesse de passage d'une formulation à une autre entrame une simplification
dans la mise au point des modèles numériques.
En effet, il ne sera pas nécessaire, dans le cadre des Eléments Finis de disposer de deux
codes de calcul, l'un en force et l'autre en déplacement pour tester les modèles numériques.
La seule formulation en déplacement génère deux familles de modes normaux:
* les modes libres sont associés à la formulation primale
* les modes encastrés vont constituer la base de la formulation duale.
Néanmoins, dans le cadre d'un formalisme général, il sera chaque fois nécessaire de
décrire les deux formulations primale et duale respectivement en déplacement et en contrainte.
11.4 TRONCATURE DES RES OLVANTES
1) Formulation primale
Afin d'appliquer ces méthodes dans un contexte expérimental, il est intéressant de
chercher les solutions du problème spectral dans l'espace amputé des modes de corps
rigides. Une extension à l'espace' Lsera envisagée chaque fois que cela sera nécessaire.
L'équation dynamique (1.82) peut être écrite sous la forme intégrale de FREE DOHLM
suivante afin d'obtenir une expression générale des éléments de l'espace
(1.124) X - c& (i x = P. <c¿-=1
où
(1.125) (D) =
est la matrice dynamique.
P et c. sont respectivement les déformées statiques associées à la distribution
deforce et les forces généralisées de frontière.

(1.130)
(1.131) (-: PC
où
50
La solution . s'écrit alors:
&(1.126) = L ÇP) PL .
où ÇR est la résolvante de l'opérateur matriciel
(1.127) = Ç(t) -
Les modes libres ) L. forment une base orthogonale complète dans l'espace
où il convient de chercher l'expression de la résolvante
Il suffit en effet de déterminer (R.) c's. pour obtenir la solution X d'après
l'équation (1.126)
Or les modes libres X L obtenus expérimentalement sont en faible nombre. Cette
troncature modale induit une influence sur la solution cherchée qu'il est nécessaire de prendre
en compte par une étude systématique de l'expression de la résolvante (R.)
D'après la relation (1.127), le vecteur () e est solution de l'équation suivante:
(1.128) ( (t - A. (ì)) (R. =. E
Soit (T) la projection orthogonale au sens du produit scalaire sur les 'YL.
premiers modes libres )(L déterminés, l'équation (1.128) devient
(1.129) (') Lot (T) (D) ÇT) - (u-) (b) (t.rv))(R P
.
avec
La solution ÇP) f cherchée s'écrit à l'aide des coordonnées modales 9
(1.132)9
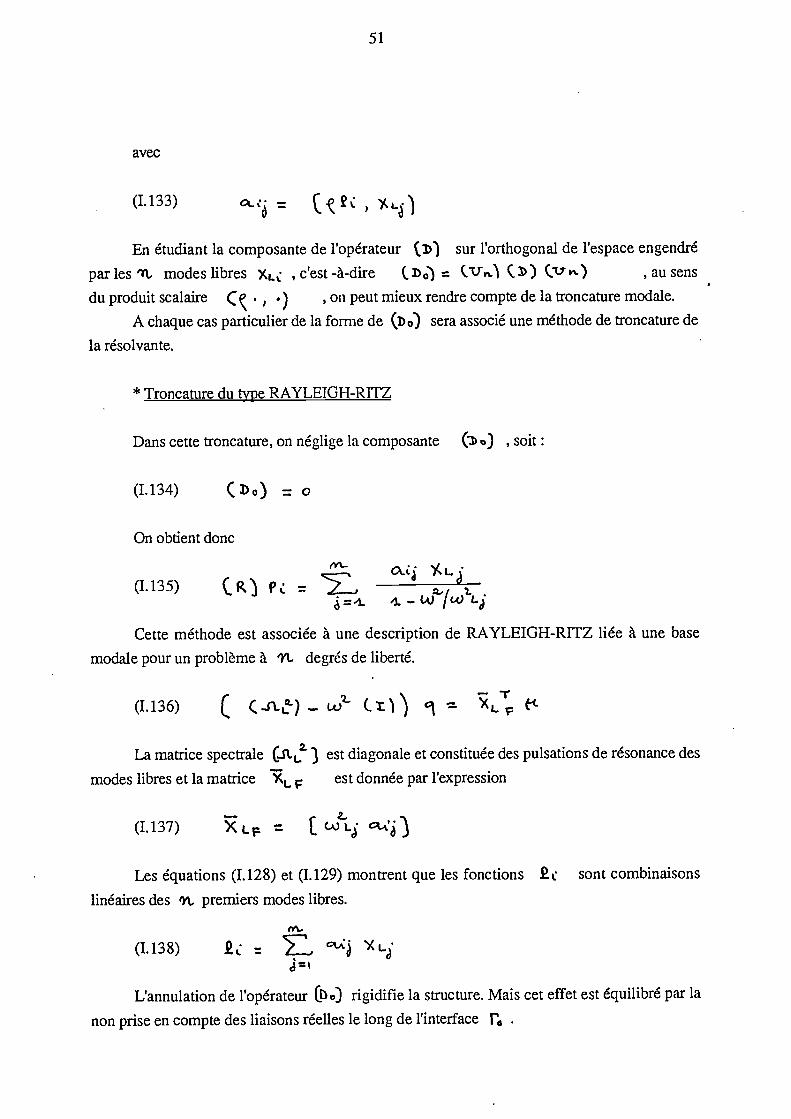
avec
(1.133) = , )(t)
En étudiant la composante de l'opérateur ÇD) sur l'orthogonal de l'espace engendré
par les 'n.. modes libres XL,, , c'est -à-dire (I) = (u.' (:D) (v ) , au sens
du produit scalaire (J ., ) , on peut mieux rendre compte de la troncature modale.
A chaque cas particulier de la forme de (Do) sera associé une méthode de troncature de
la résolvante.
* Troncature du type RAYLEIGH-RITZ
Dans cette troncature, on néglige la composante ( o) , soit:
(1.134) = o
On obtient donc
(1.135) (R P
Cette méthode est associée à une description de RAYLEIGH-RITZ liée à une base
modale pour un problème à n degrés de liberté.
(1.136) ( (JL-) W Ct) 'XL F
La matrice spectrale Çsi.) est diagonale et constituée des pulsations de résonance des
modes libres et la matrice RL F est donnée par l'expression
51
(1.137) XLF=
)(.Lj
i. -
Les équations (1.128) et (1.129) montrent que les fonctions 2.c sont combinaisons
linéaires des . premiers modes libres.
(1.138) 'E., °'à (Lj
L'annulation de l'opérateur Cb o) rigidifie la structure. Mais cet effet est équilibré par la
non prise en compte des liaisons réelles le long de l'interface r.
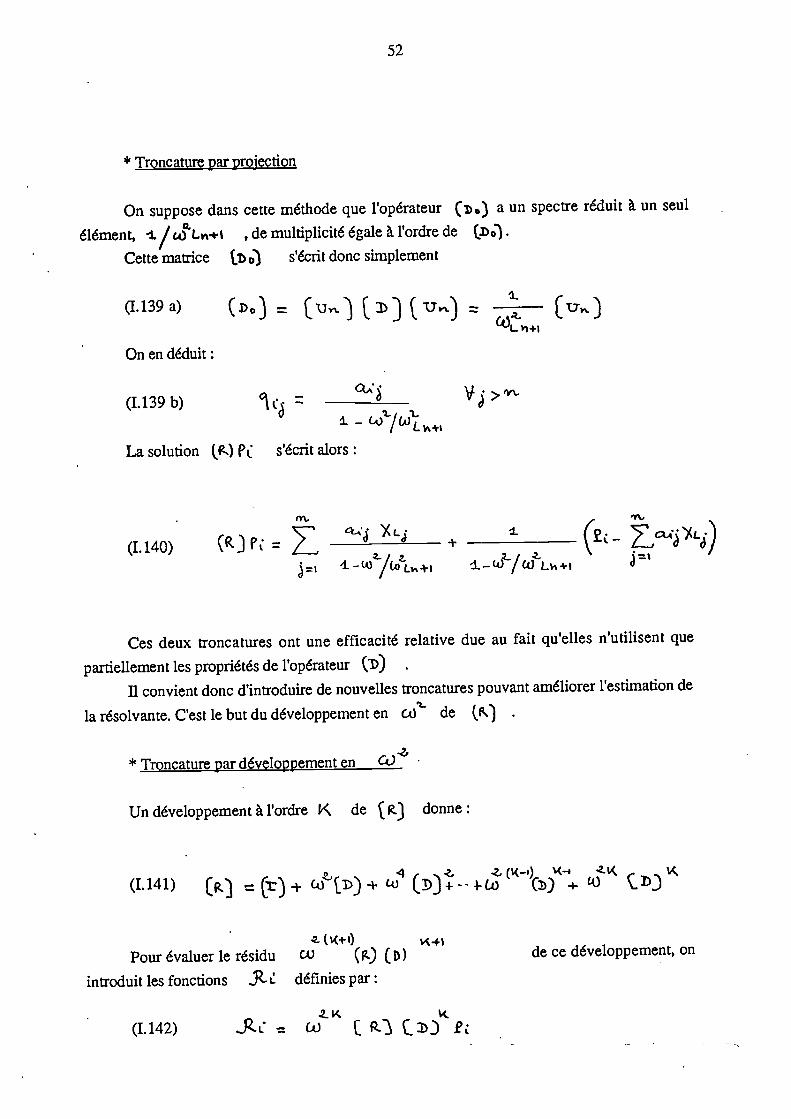
* Troncature par projection
On suppose dans cette méthode que l'opérateur (i.) a un spectre réduit à un seul
élément, -t/$L.w4.I ,de multiplicité égale à l'ordre de (DO).
Cette matrice Ç..D o) s'écrit donc simplement
(1.139 a)
On en déduit:
(1.139 b)
= (iv J 7t) -
52
i -La solution () P s'écrit alors:
(1.140) (J Pt
(1.142) =
t=I
Ces deux troncatures ont une efficacité relative due au fait qu'elles n'utilisent que
partiellement les propriétés de l'opérateur (i)II convient donc d'introduire de nouvelles troncatures pouvant améliorer l'estimation de
la résolvante. C'est le but du développement en cAf de ()
* Troncature par déve1opement en
Un développement à l'ordre K de Ç R.) donne:
¿ ((-i) "<-e
(1.141) Çiì)+ (--u (i) + O ÇjJ
Pour évaluer le résidu W (iz.) (D) de ce développement, on
introduit les fonctions Y- définies par:
t(
i (- jacp(Lc)+
tR(iJ CRCbJ £
53
Elles doivent induire une diminution de l'influence de la troncature à l'ordre 'fl. dans
l'expression de la résolvante.
Un calcul dans la base modale donne aisément
(1.143) Ç. 9'Ç )(L
où
(1.144) = -Cu
On obtient alors
(V-i)(1.145) (ct) £ L + cJib) + -- # +
In- &.. f .. -%
+w L. 0
L1
2) Formulation duale
Comme en formulation primale, on cherche les solutions du problème spectral dual dans
l'espace amputé du champ de contraintes statiquement équilibrées.
L'équilibre dynamique (1.118) peut être exprimé sous la forme intégrale deFREEDOHLM
&(1.146) Y - CE) I = t
où
(1.147) (zr) [s)
)et sont respectivement des déplacements généralisés et des champs
de contraintes.
54
La solution Y peut s'écrire en fonction de la résolvante IR) de l'opérateur (E).
(1.148) = . (e.) >
où
(1.149) = Ci) - s..&ì2 I E))tII est donc nécessaire de déterminer () afin d'obtenir la solution Y
La défmition (1.149) induit l'égalité suivante:
(1.150) (ct) - c& (E)")t.R c =
On utilise la base complète des modes de contrainte 'YE.I,. dans l'espace '1 et la
projection de l'opérateur de base (E) sur l'espace engendré par les 'fl premiers
modes de contrainte. Soit:
(1.151) (E;) = ÇT.) LE) (.-T.0 +
avec
(1.152) (Jj -
est l'opérateur matriciel de projection sur l'espace
On envisage ensuite diverses méthodes de troncature de façon similaire à la formulation
primale.
* Troncature de type RAYLEIGH-RITZ
On approxime la matrice (E) par sa composante principale (r) (E) (1\-.)et on obtient:
,)y.(_ tt)) iEj(1.153) =
II s'agit de remplacer l'opérateur
(1.159)
55
Il est possible de relier les termes intervenant dans cette expression en fonction des
champs de déplacement ) et 2 . En effet:
(1.154) e. (, ?j = C. YE,)
Or la relation du dualité permettant de passer des contraintes aux déplacements donne:
(1.155) C V - (A ?1)
On en déduit
(1.156) - ,=. Ck)''
où
(1.157) .= 2,
* Troncature par projection
uv:) (E) par
t_
1.
n +
i)
=1 - w)
où les termes e (t s'écrivent
On obtient une expression du produit 1-r;)
(1.158) e
+Ct)(d._ (A)h#, / wEe )

56
* Troncature par développement en Co
Un développement en ) de la résolvante () peut diminuer l'influence de laIroncature
L(t() (i .K(1.160) ()=(r)+w(E)+--w (E) + '
On obtient alors
(1.161) e. (. , ) e. [stj) + Lote (EI., (E))., - -
< ' L 1ij(c4C# Cc.) (?;
()t(I)Lu
.2. (z..,)WEe
Les termes intervenant dans ce développement introduisent deux familles de matrices
symétriques:
(I.162a) C. ('' (E) = e.N ()W)
( w N(I.162b) e. t:.. -
) = C I CI)
Grâce au produit scalaire , les matrices intervenant dans ce développement
peuvent être calculées dans le cadre de la formation primale.
III. SYNTHESE MODALE POUR LES NOEUDS INTERIEURS
HI. i PROCEDURE GENERALE
57
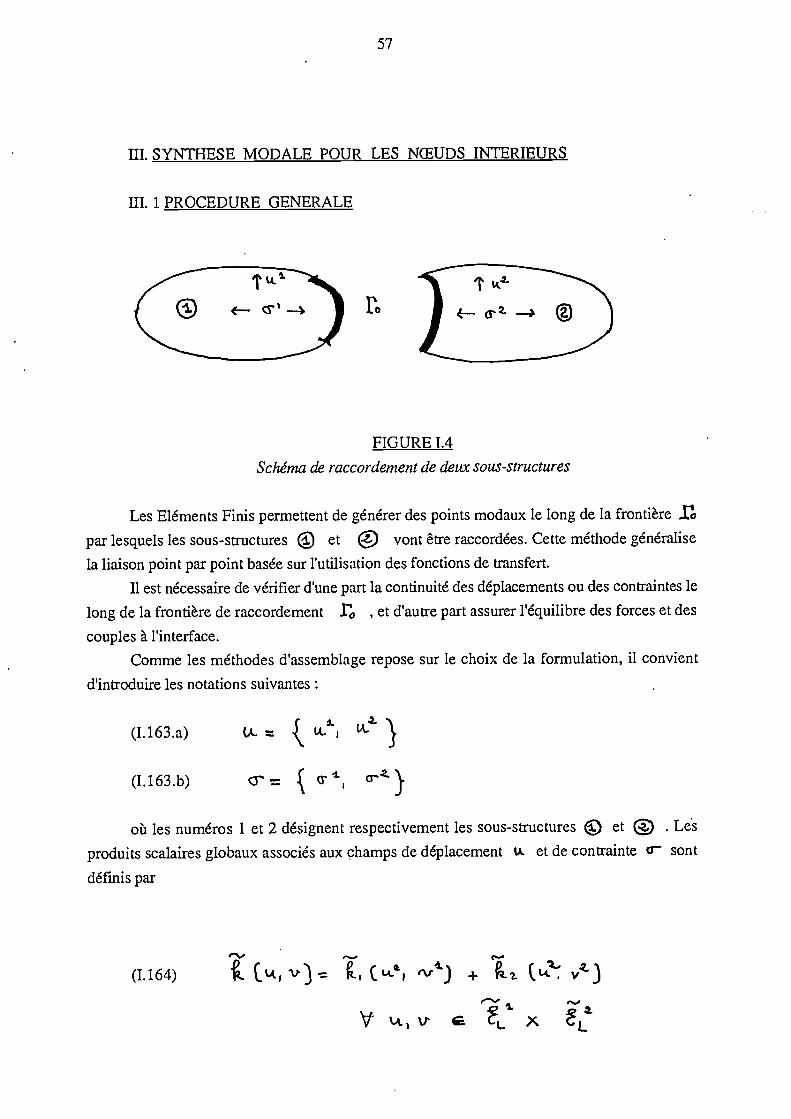
FIGURE 1.4
Schéma de raccordement de deux sous-structures
Les Eléments Finis permettent de générer des points modaux le long de la frontière r0par lesquels les sous-structures © et vont être raccordées. Cette méthode généralise
la liaison point par point basée sur l'utilisation des fonctions de transfert.
II est nécessaire de vérifier d'une part la continuité des déplacements ou des contraintes le
long de la frontière de raccordement .t , et d'autre part assurer l'équilibre des forces et des
couples à l'interface.
Comme les méthodes d'assemblage repose sur le choix de la formulation, il convient
d'introduire les notations suivantes:
(I.163.a) (A. LC, UC
(I.163.b) = .Ç r cr).
où les numéros i et 2 désignent respectivement les sous-structures © et . Les
produits scalaires globaux associés aux champs de déplacement u- et de contrainte 0 sont
définis par
(1.164) qz_ (t4, - .= g, (té, 4/tj ($- -)
'çt

(1.165)
V
111.2 FORMULATION PRIMALE
La formulation primale repose sur l'utilisation des modes libres comme base dedescription. Nous présentons trois méthodes : * utilisation des multiplicateurs de LAGRANGE
* utilisation de la raideur de jonction * utilisation de la souplesse résiduelle de frontière.
1) Utilisation des multiplicateurs de LAGRANGE
* Choix des coordonnées généralisées
Le déplacement de la sous-structure 3 est recherché sous forme d'une
combinaison linéaire des premiers modes libres
(1.166) XL.
Les N3. coordonnées généralisées ?\' obtenues par discrétisation sont des
combinaisons linéaires des participations modales 9'.d
(1.167)
désigne intérieur et F frontière
58
t =ì: Ç-;,
c
-' 1x't \où IAFJ
LX est la matrice modale de dimension ti x
Les colonnes des sous-matrices [Lt) et {%LcJ sont constituées
respectivement des valeurs des modes sur les noeuds intérieurs et sur les noeuds de frontière.
L'équation matricielle N x N d'équilibre s'écrit:
+ (61., ti.]
Ç <'Li 1._._ 'í)
(hrr (èk1i: '.2.LO
Ft flpjçj(<tr <t p f. ' -'
(1.168) I IIiFt Iç .1

59
Dans la base modale, cette équation se contracte en un système matriciel /fl ., ,YI.I
t Q. - C 1-i--(1.169) C-- J - (r) 't - )c L j fA
* Assemblage des sous-structures et
Le raccordement des sous-structures J et ® induit une dépendance entre lescoordonnées modales c et de J et j . Elle est justifiée par les conditions
de liaison à la frontière r0 . Les équations de liaison peuvent s'écrire matriciellement:
(1.170) Çc )ç2.) Ç]
2.
où (, A' '.\ = >SL. F o.k- A ) C x L , c'est-à-dire les
participations des modes libres respectivement de ® et de sur la frontière.
LAS) est de taille 2 X 'f4. et , P xY. si 2 désigne le nombre de
degré de liberté de frontière.
Le Lagrangien du système total peut s'écrire:
(1.171) L . 94S91- 1vj
Les matrices spectrales ¶.SL) et (..n.) Sont diagonales et sont constituées des
carrés des pulsations des modes libres et des zéros associés aux modes de corps rigides.
Le vecteur ¡'Y) est constitué des multiplicateurs de LAGRANGE.
Les équations d'équilibre s'obtiennent aisément en appliquant le principe de moindre
action d'HAM]LTON:
(1.172)1_ç.tt ,11 (4-to -cl.2.J1ct)
rl o\(j1\'o ijz)
On peut déterminer l'expression des multiplicateurs de LAGRANGE en fonction des
coordonnées modales.
vient
(1.174) Ct \ A&)
(1.178)
(1.179)
I - Aß A'i R BA'
60
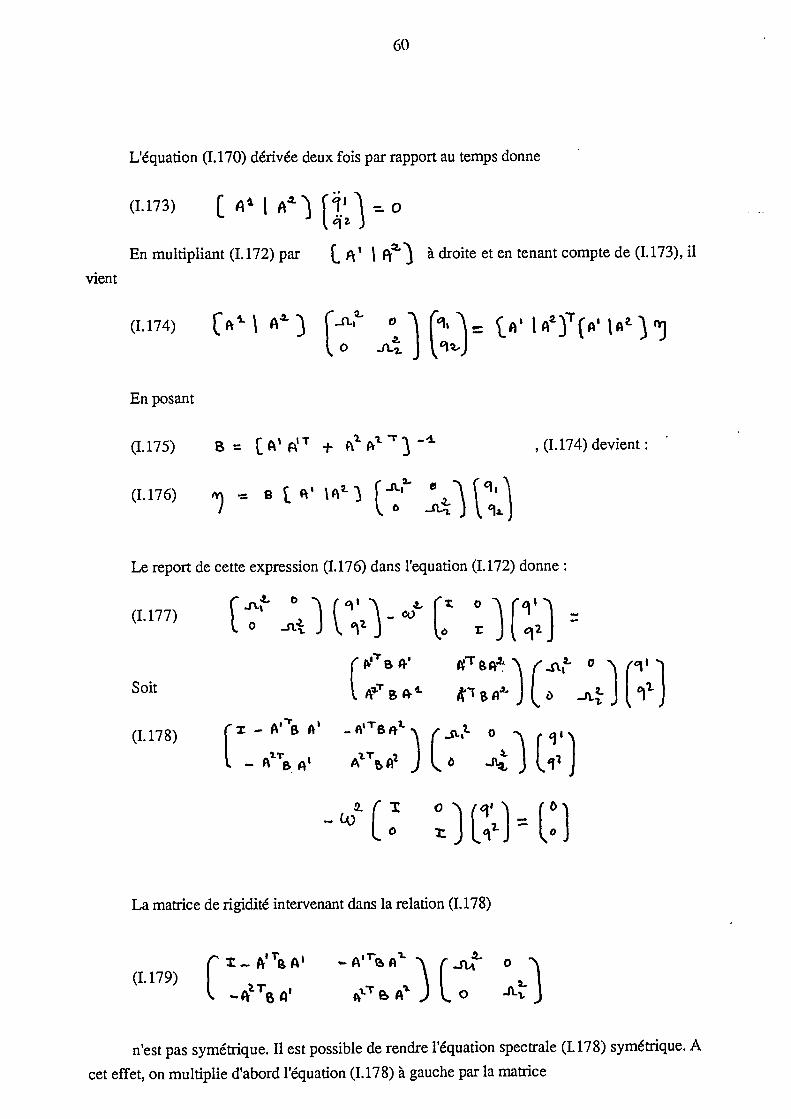
L'équation (L 170) dérivée deux fois par rapport au temps donne
(1.173) [ P, ( Aj 1' \ =.t9z J
En multipliant (1.172) par L i' i c) à droite et en tenant compte de (1.173), ii
1- o\(%o $J-J
. k' 1A3 (n.12 ø -' Çqo
.2.fl Dit j.1' O -'
J j 2J
fE o
L° zjitj=o)
La matrice de rigidité intervenant dans la relation (1.178)
.2..rI_A"A' .-A'A (i-t. o
- j o
t& LA)l(A*tAa)J
Le report de cette expression (1.176) dans l'equation (1.172) donne:
Ç° \ .. (z o (\
(1.177) j j -4\ ..ç 9
Soit f B A J (ò i I i
n'est pas symétrique. Il est possible de rendre l'équation spectrale (1.178) symétrique. A
cet effet, on multiplie d'abord l'équation (1.178) à gauche par la matrice
En posant
(L175) 8= C4'iT (1.174) devient:
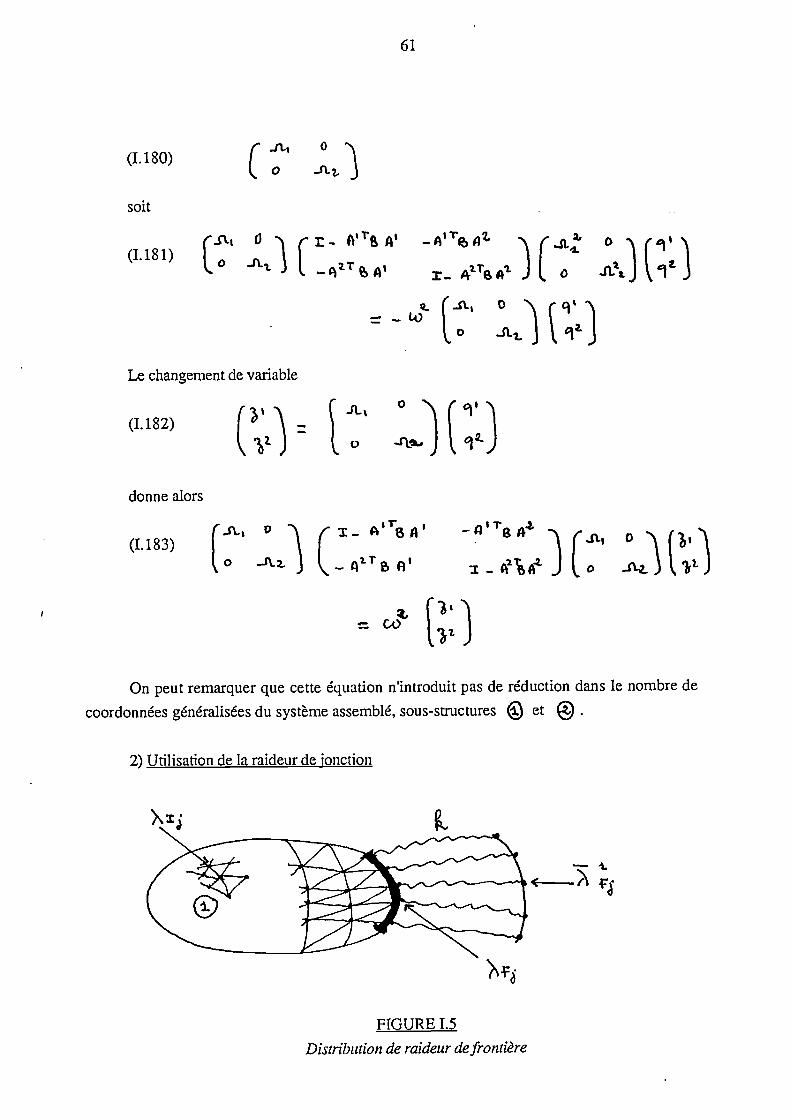
Le changement de variable
(1.182)
donne alors
(1.183)
(J1i O
o _n.2
o -'
t.,° -L
O .Jt2 j
61
. (a, o (q\o Jt2
_\ O \ (c \:i:- AtlßAt J t O JtlLj j
flIrß
,t11
\(4t fl(,Ji_o -i:
On peut remarquer que cette équation n'introduit pas de réduction dans le nombre de
coordonnées généralisées du système assemblé, sous-structures 6J et
2) Utilisation de la raideur de jonction
FIGURE 1.5
Distribution de raideur de frontière
* La méthode
Pour améliorer les techniques de synthèse modale, on utilise des matrices de raideur
associées à des déplacements nodaux le long de l'interface de raccordement F0 . Celles-ci
traduisent la souplesse des jonctions induites par les sous-structures adjacentes et atténuent les
effets de troncature modale.
Les Eléments Finis qui permettent une description matricule des frontières par le biais
des noeuds qu'ils y génèrent, facilitent également l'introduction de ces raideurs de jonction dans
le calcul numérique.Comme dans l'équation matricielle (1.168) on regroupe les noeuds de même nature:
indice I pour les noeuds intérieurs et indice F pour les noeuds de frontière. Les matrices
de rigidité et (Kl de masse de la sous-structure (M) s'écrivent alors
(1.184) (lç')(vxi (ti')
PWr bFF
* Choix des coordonnées généralisées
Une description de type RAYLEIGH-RITZ donne en Eléments Finis
62
(1.185)
(1.186)
rA-
A? Y'. 9L +
+
Les modes libres 'X, i. sont des formes approchées des modes discrets Xt.
obtenus par Eléments Finis à l'aide des matrices (ic) et (t-i)
et correspondent respectivement aux déplacements des noeuds
intérieurs et des noeuds de frontière. Les fonctions sont des déformées utilisées dans
l'interpolation en Eléments Finis.
En introduisant les premiers modes libres 'K , on obtient une nouvelle
description
Le changement de coordonnées suivant:
(1.188)
avec
(1.189) MIF +
(1.190) (rF + XT
*Synthèse d'une sous-structure
Le modèle que nous venons de définir, et qui est illustré par la FIGURE 1.5 permet
d'approcher les modes d'une nouvelle structure. Celle-ci est obtenue en introduisant la raideur
additionnelle ,. répartie sur les noeuds de la frontière
En effet, l'introduction des noeuds fictifs de frontière qui dédoublent les noeuds réels
induit des forces généralisées liées à la raideur de jonction et aux déplacements de ces
deux familles de noeuds. Soit:
(1.191) F =
ç représente le déplacement des noeuds fictifs et est associé aux mêmes fonctions
de forme que . La matrice de raideur de frontière s'écrit simplement
(1.192)
63
= 1xlt o\1d1r)F
(i PILr
MFL FL
XLF
donne deux nouvelles matrices de masse ') et de raideur par simple
congruence.
(1.187)(, F
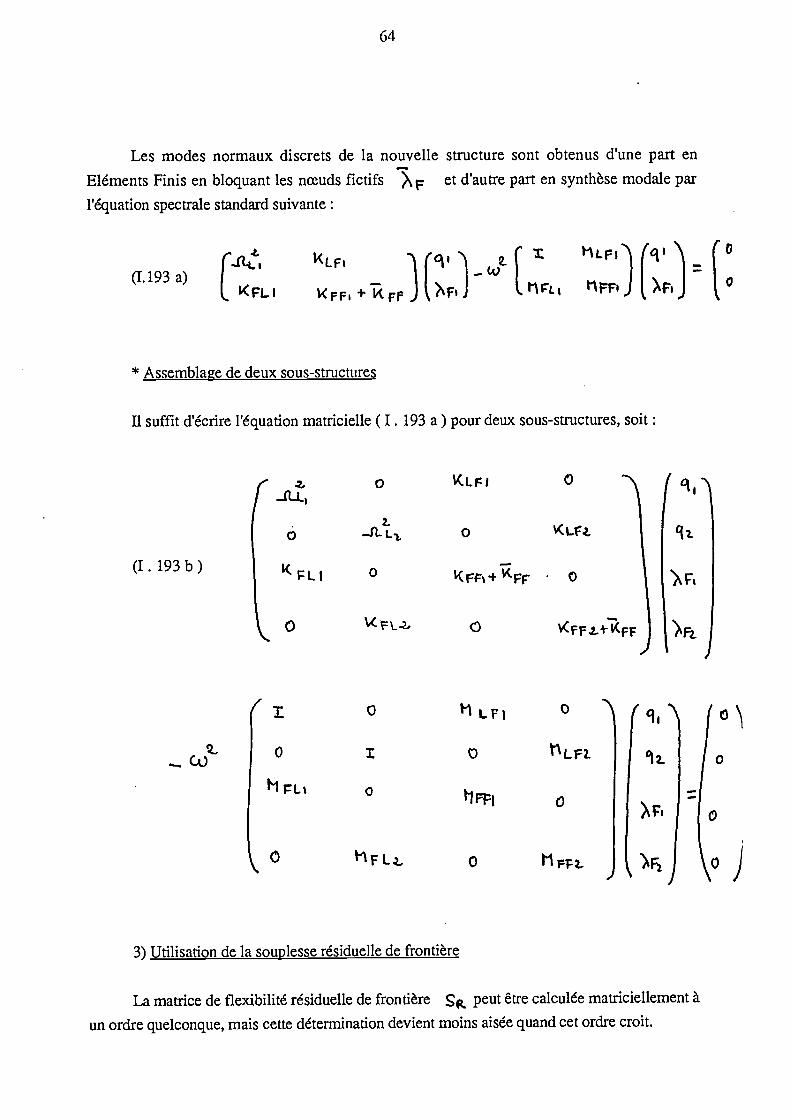
Les modes normaux discrets de la nouvelle structure sont obtenus d'une part en
Eléments Finis en bloquant les noeuds fictifs > F et d'autre part en synthèse modale par
l'équation spectrale standard suivante:
(1.193 a)
* Assemblage de deux sous-structures
II suffit d'écrire l'équation matricielle (I. 193 a) pour deux sous-structures, soit:
(I. 193 b)
L KFLI
64
<FF FF
¡I O
Q O r o
oo
O O IIFT
3) Utilisation de la souplesse résiduelle de frontière
La matrice de flexibilité résiduelle de frontière peut être calculée matriciellement à
un ordre quelconque, mais cette détermination devient moins aisée quand cet ordre croit.
1LP\('c«'\ Io
hJ1F,J (*.°
o O fc%1\
2.o
o KFF+FF O
o FF,2i4(FF
I
)
o
O
o
O
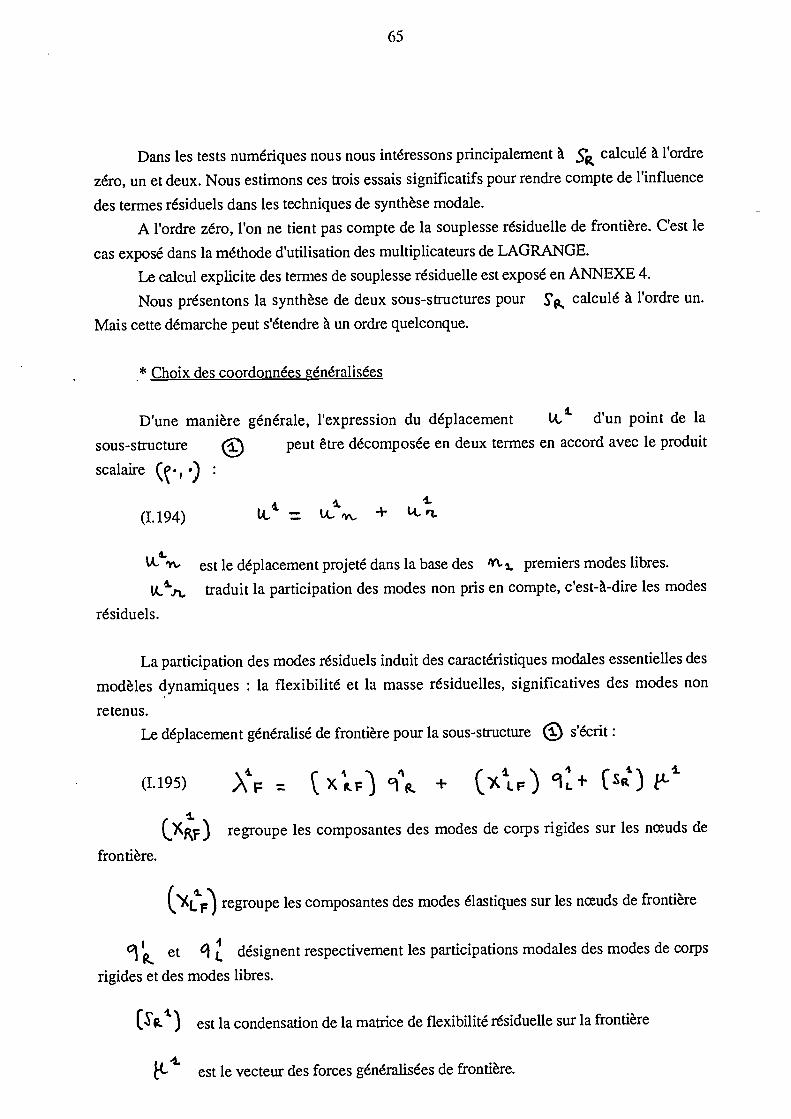
Dans les tests numériques nous nous intéressons principalement à calculé à l'ordre
zéro, un et deux. Nous estimons ces trois essais significatifs pour rendre compte de l'influence
des termes résiduels dans les techniques de synthèse modale.
A l'ordre zéro, l'on ne tient pas compte de la souplesse résiduelle de frontière. C'est le
cas exposé dans la méthode d'utilisation des multiplicateurs de LAGRANGE.
Le calcul explicite des termes de souplesse résiduelle est exposé en ANNEXE 4.
Nous présentons la synthèse de deux sous-structures pour S'p calculé à l'ordre un.
Mais cette démarche peut s'étendre à un ordre quelconque.
* Choix des coordonnées généralisées
D'une manière générale, l'expression du déplacement (A! d'un point de la
sous-structure peut être décomposée en deux termes en accord avec le produit
scalaire (ç, ')
frontière.
(1.194)
est le déplacement projeté dans la base des 'Yt1 premiers modes libres.
1A.&J. traduit la participation des modes non pris en compte, c'est-à-dire les modes
résiduels.
La participation des modes résiduels induit des caractéristiques modales essentielles des
modèles dynamiques : la flexibilité et la masse résiduelles, significatives des modes non
retenus.Le déplacement généralisé de frontière pour la sous-structure () s'écrit:
65
& & tL4= Lt + Urs.
4. r i -% 'iX&c) + (%LF 9.+ c) ¿L
regroupe les composantes des modes de corps rigides sur les noeuds de
('xF) regroupe les composantes des modes élastiques sur les noeuds de frontière
9 et désignent respectivement les participations modales des modes de corps
rigides et des modes libres.
- ) est la condensation de la matrice de flexibilité résiduelle sur la frontière
,1.'- est le vecteur des forces généralisées de frontière.
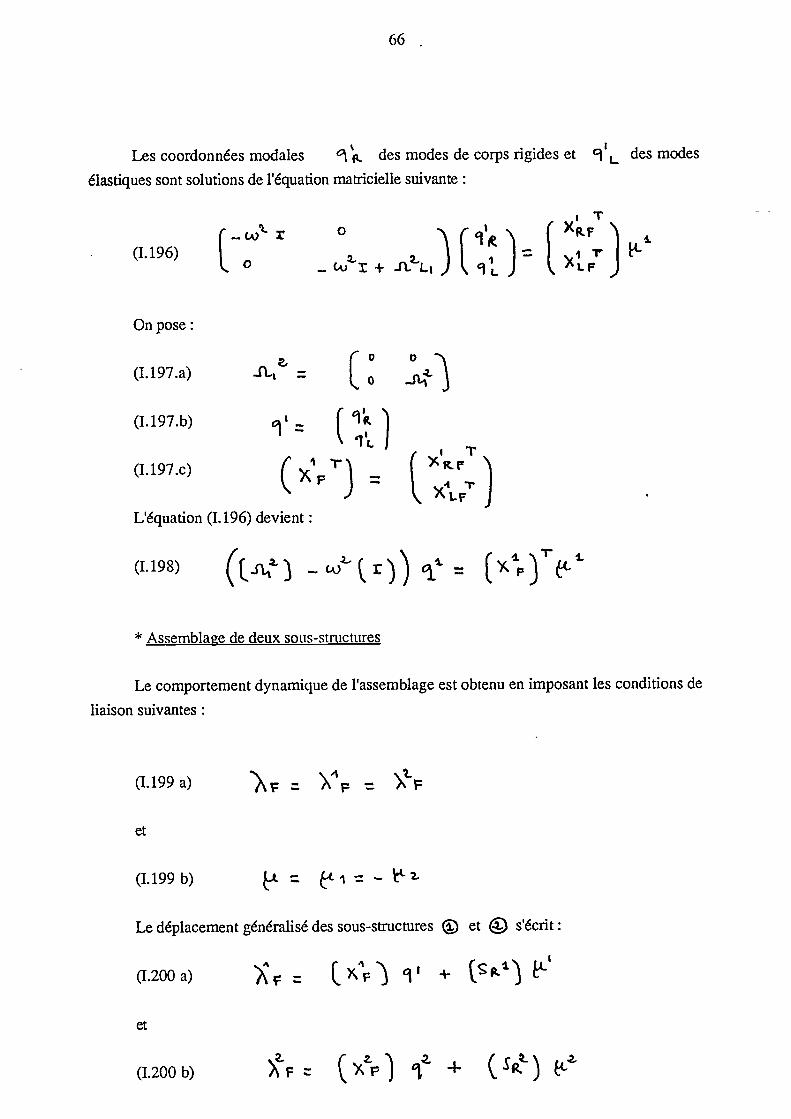
66
Les coordonnées modales q. des modes de corps rigides et 9'L des modes
élastiques sont solutions de l'équation matricielle suivante:
_CA,tr oI '1'
(1.196) [ o +
On pose:
(I.197.a) [: _n
(I.197.b) 1(
'1L J / s TC f r' ( Xgr(I.197.c) X F
J= 4 r
XLFL'équation (1.196) devient:
(1.198) (.-) i ( r)) cj' =
* Assemblage de deux sous-stnictures
Le comportement dynamique de l'assemblage est obtenu en imposant les conditions de
liaison suivantes:
(L199a)
et
(1.199 b) -
Le déplacement généralisé des sous-structures © et () s'écrit:
s' I
(I.200a) .ç 1)SF') 9' + (SEL ) E
et
(1.200 b)(Z) + (st) -2
J
ITXM
p'ALP
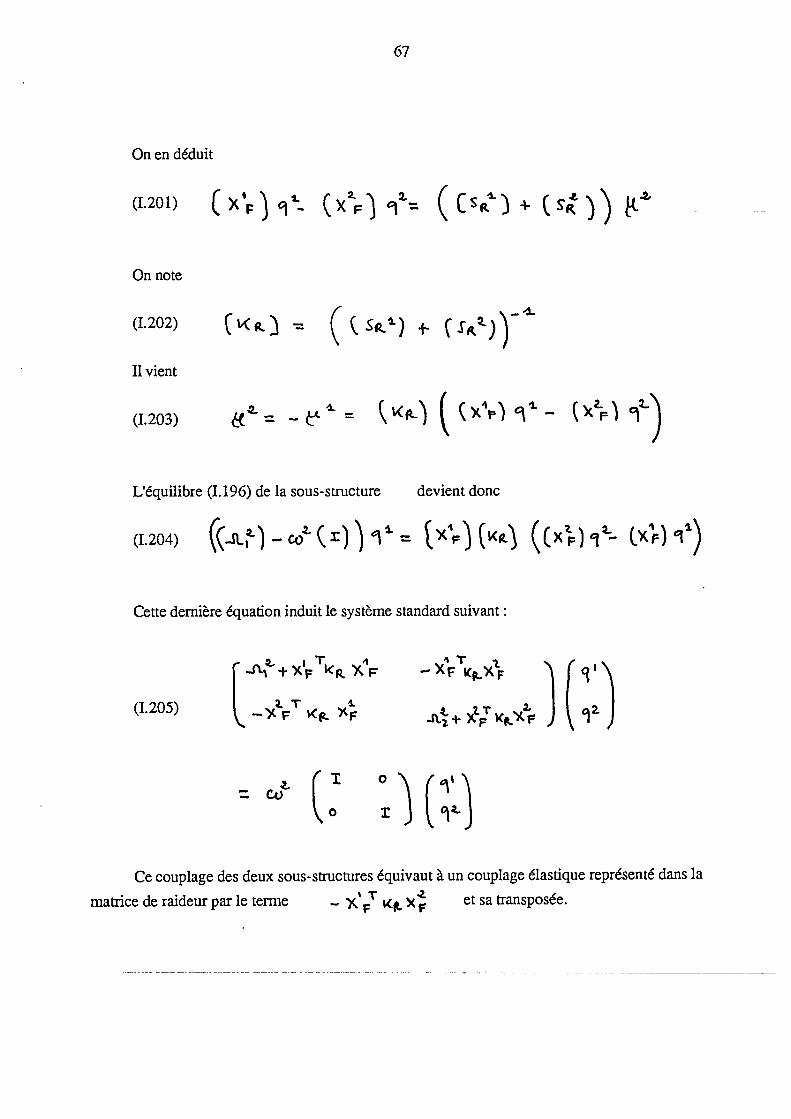
On en déduit
(1.201) (X'F) (X2: c (Cs + (a)') '
67
On note
(1.202) (tIC p
II vient
(1.203)
(çst) f Ç$Q)
ct_ (2j
L'équilibre (L 196) de la sous-structure devient donc
(1.204) ()_co(')')i F)(xt ((x7j)c (.x1p)91)
Cette dernière équation induit le système standard suivant:
4T'\ (9IS\\
$+K j (aj
o
S)
Ce couplage des deux sous-structures équivaut à un couplage élastique représenté dans la'T -amatrice de raideur par le terme et sa transposée.
(Çx
+X'FkR. X1F
(1.205) %F t

ffl.3 FORMULATION DUALE
La formulation duale utilise les modes encastrés comme base de description. Nous
présentons trois méthodes pour illustrer des techniques de synthèse modale: * utilisation des
déformées statiques * utilisation de la raideur de jonction * utilisation de la masse résiduelle de
frontière.
1) Utilisation des déformées statiques
* Choix des coordonnées généralisées
Le déplacement U..4 de la sous-structure est recherché sous la forme d'une
combinaison linéaire des i\ premiers modes encastrés et des N déforméesstatiques . .
(1.206) (k1 =
68
- >Fj
Les coordonnées généralisées obtenues par discrétisation ont pour expression:
1.(c \
(1.207) 14 I
Les notations sont analogues à celles utilisées dans les parties précédentes. Cechangement de coordonnées induit l'équilibre dynamique suivant dans la base modale par
congruence
O
L ° ,P) )'F J(Pt.tl
(1.208)
test la matrice spectrale diagonale composée des carrés des pulsations des
modes encastrés
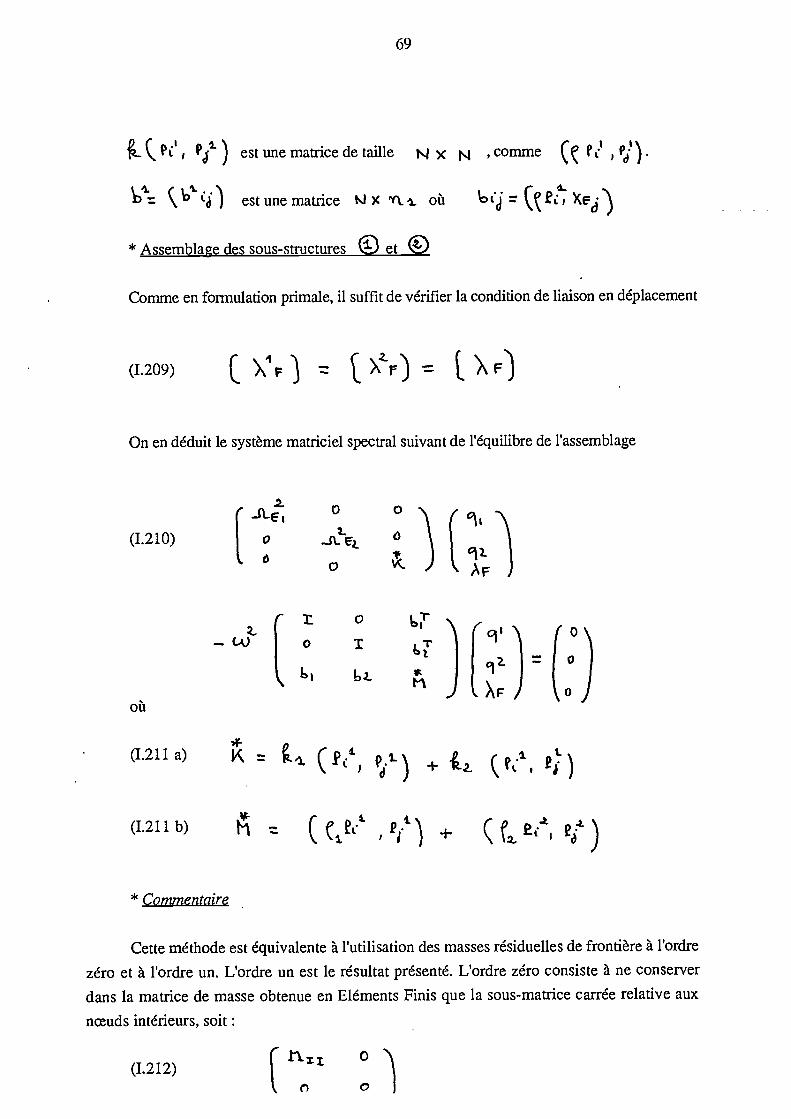
(Pe, P/) est une matrice de taille p..j x NI comme l)
Ç) est une matrice t1 x où 6CJ (2 Xe)
* Assemblage des sous-structures © et ©
Comme en formulation primale, il suffit de vérifier la condition de liaison en déplacement
(1.209) = >r)
On en déduit le système matriciel spectral suivant de l'équilibre de l'assemblage
O O\ 'c\2..
[(1210) 0 cj.
o
o
-JxFt
L
69
p.t
o
(1.211 b)Ç
!ttÇ t, t
* Commentaire
Cette méthode est équivalente à l'utilisation des masses résiduelles de frontière à l'ordre
zéro et à l'ordre un. L'ordre un est le résultat présenté. L'ordre zéro consiste à ne conserver
dans la matrice de masse obtenue en Eléments Finis que la sous-matrice carrée relative aux
noeuds intérieurs, soit:
(1.212) rtï:ti O
o
)
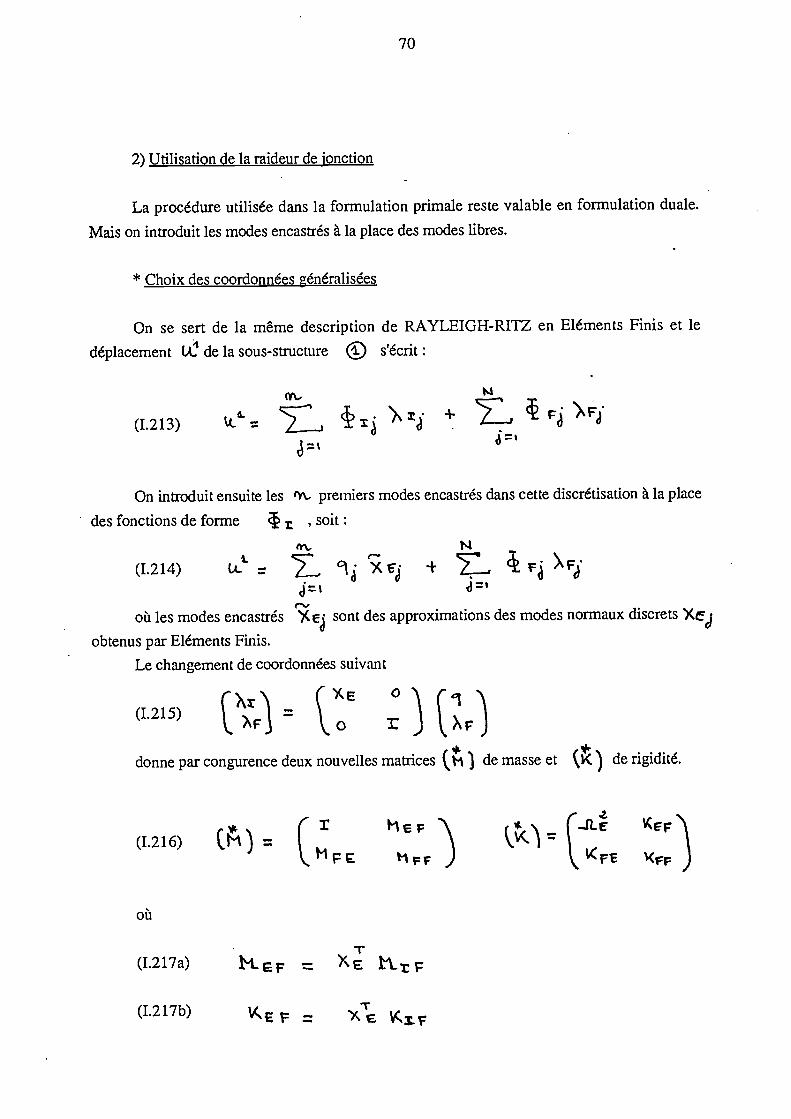
2) Utilisation de la raideur de jonction
La procédure utilisée dans la formulation primale reste valable en formulation duale.
Mais on introduit les modes encastrés à la place des modes libres.
* Choix des coordonnées généralisées
On se sert de la même description de RAYLEIGH-RITZ en Eléments Finis et le
déplacement (A.' de la sous-structure (f) s'écrit:
(1.216)
70
4¿=1
On introduit ensuite les 'n.- premiers modes encastrés dans cette discrétisation à la place
des fonctions de forme , soit:
N
i -t. 4I)Fát)
où les modes encastrés sont des approximations des modes normaux discrets
obtenus par Eléments Finis.
Le changement de coordonnées suivant
Xi (XE i(1.215)
donne par congurence deux nouvelles matrices (h) de masse et ÇKS)
de rigidité.
<VF
où
(I.217a) X 1-TF
(1.2 17b) =
(1.214)i.
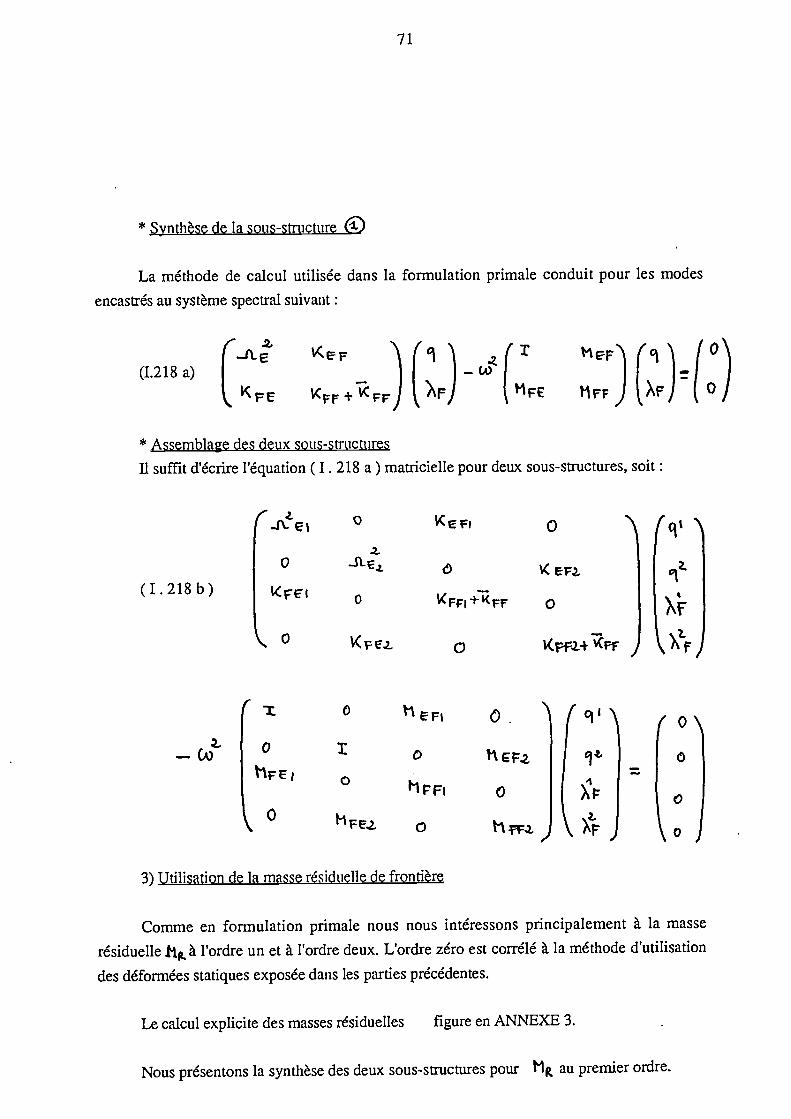
* Synthèse de la sous-structure
La méthode de calcul utilisée dans la formulation primale conduit pour les modes
encastrés au système spectral suivant:
(1.218 a)
* Assemblage des deux sous-structures
II suffit d'écrire l'équation (I. 218 a) matricielle pour deux sous-structures, soit:
o o '\ Ic:iI\o o
(I.218b)o o
>%
o (cF2-+F i
o
Q
tFEl o
71
3) Utilisation de la masse résiduelle de frontière
Comme en formulation primale nous nous intéressons principalement à la masse
résiduelle .t'j à l'ordre un et à l'ordre deux. L'ordre zéro est corrélé à la méthode d'utilisation
des déformées statiques exposée dans les parties précédentes.
Le calcul explicite des masses résiduelles figure en ANNEXE 3.
Nous présentons la synthèse des deux sous-structures pour au premier ordre.
( \ F' (c fo\
F+FF) ( flFFJ XFi(0)
o.
o t".
O
C) hçç.1 >,
(O\o
o

72
* Choix des coordonnées généralisées
Pour la sous-structure la force généralisée ,& s'écrit:
i i It 4 \4.(1.219) w 1- b - 'ipt AF)
ci représente les participations des déformées statiques t41..
représente les coordonnées modales associées aux modes de contrainte Eç.
est une matrice de composantes = 2;,
L'équilibre de la sous-structure ® s'écrit dans la base modale:
I- -i c.ok C
T_WE% J
(I.222a)
(I.222b)
(1.223) >\ r =
L'égalité (1.2 19) permet alors d'écrire:
hR.1 t1R + ' - Is IGtEt)
(1.221) = ( C ç t4t)')
K t est une matrice carrée dont l'ordre est défini par le nombre de degré de liberté de
frontière.
* Assemblage de deux sous-structures
L'assemblage est réalisé par les conditions de liaison suivantes:
1' 4.(1.220)
où
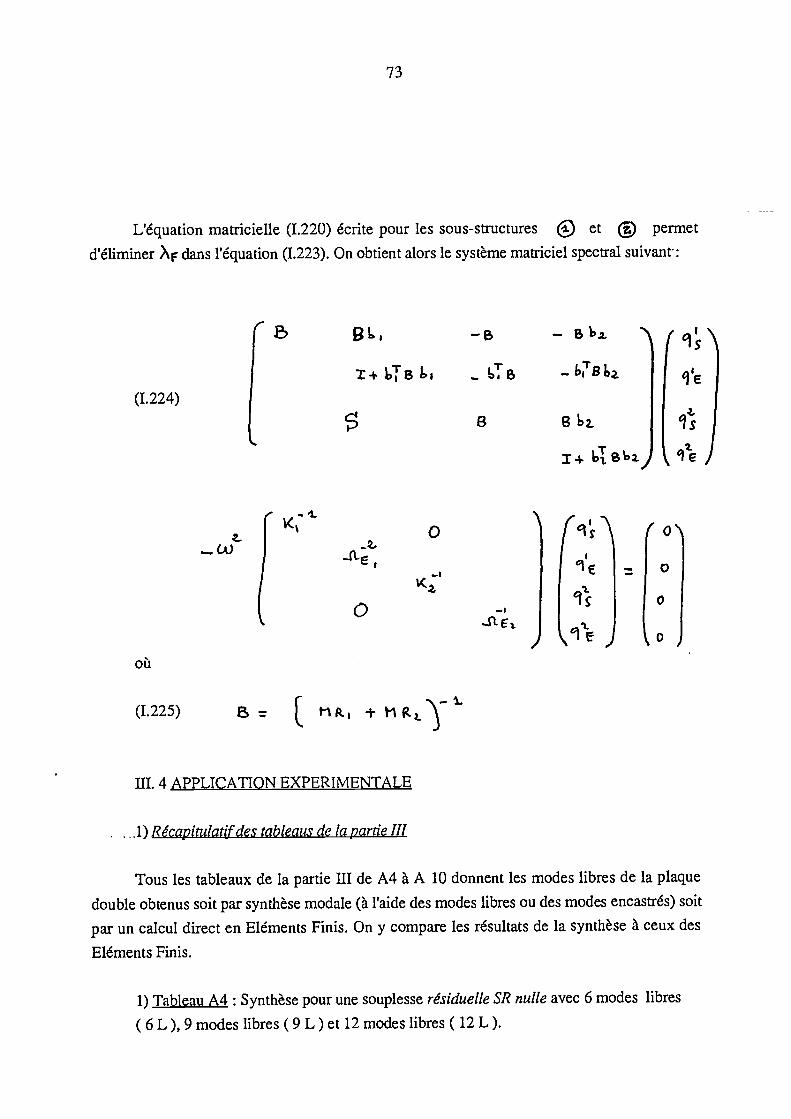
L'équation matricielle (1.220) écrite pour les sous-structures ® et ® permetd'éliminer )'F dans l'équation ([223). On obtient alors le système matriciel spectral suivant:
où
(L 225)
w
L
= c
o
73
111.4 APPLICATION EXPERIMENTALE
1) Récapiwlat f des tableaus de la partie 111
Tous les tableaux de la partie III de A4 à A 10 donnent les modes libres de la plaque
double obtenus soit par synthèse modale (à l'aide des modes libres ou des modes encastrés) soit
par un calcul direct en Eléments Finis. On y compare les résultats de la synthèse à ceux des
Eléments Finis.
1) Tableau A4: Synthèse pour une souplesse résiduelle SR nulle avec 6 modes libres
(6 L), 9 modes libres (9 L ) et 12 modes libres (12 L).
B B - Ba '\ (\'IE i
B B2. 'is It'I+PJDt) 'eJ
o
-u- Et
.4'
1
(1.224)
t
(
o
o
i
74
Tableau A5 : Synthèse avec une souplesse résiduelle SR calculée à l'ordre i avec 6 modes libres
(6 L) et 9 modes libres (9 L).
Tableau A6: Synthèse avec une souplesse résiduelle SR calculée à l'ordre 2 avec 6 modes libres
(6 L) et 9 modes libres (9 L).
Tableau A7 : Comparaison des résultats de synthèse avec une souplesse résiduelle SR calculée à
l'ordere ¡ et à l'ordre 2 pour les modes élevés
Tableau A8 : Synthèse avec une masse résiduelle MR nulle avec 6 modes encastrés ( 6 E) et 9
modes encastrés (9 E).
Tableau A9 : Synthèse avec une masse résiduelle MR à l'ordre ¡ avec 6 modes encastrés (6 E
) et 9 modes encastrés (9 E).
Les sigles N.C. désignent Non Calculés tandis que M.C.R. signifient Modes de Corps Rigides
dans tous les tableaux de ce travail.
2) Commentaire des résultats
Nous avons illustré ce paragraphe par plusieurs essais numériques en formulation primale comme
en formulation duale. Nous avons recherché les modes libres de la plaque double en longueur de la
plaque de référence. Ce résultat a été obtenu par assemblage de deux plaques identiques surlesquelles nous avons fait la synthèse. Les fréquences des douze premiers modes libres obtenus
sont comparées à celles de la plaque double calculée par Eléments Finis.
* Formulation primale
Les tests en formulation primale utilisent les modes libres dans le schéma suivant:
75
Les résultats des tableaux A4 et A5 et A6 correspondent respectivement à l'utilisation desmultiplicateurs de LAGRANGE, c'est-à-dire la méthode de RAYLEIGH-RITZ où la souplesse
résiduelle est nulle, à l'utilisation de la souplesse résiduelle au premier ordre, puis au deuxième
ordre.Le tableau A4 fait apparaitre 3 colonnes de résultats où l'on utilise d'abord 6 modes libres pour
chaque plaque, soit 18 modes au total en tenant compte des 6 modes de corps rigides, ensuite i
paire de 9 modes libres, (soit 24 modes au total) et 12 modes libres par plaque (soit 30 modes au
total) afin de réaliser l'assemblage. Comme nous avons 15 degrés de liberté de frontière, donc 15
inconnues, l'assemblage réalisé avec 18 modes devrait permettre le calcul des 3 premiers modes de
la plaque double et celui obtenu à partir de 24 modes les 9 premiers modes et enfin 30 modes pour
les 15 premiers modes de la plaque.
A partir de 18 modes comme base de description, nous obtenons comme prévu les 3 modes de
corps rigides (M.C.R.) de la plaque double, (voir colonne 6L du Tableau A4). Les autres modes
calculés s'écartent très fortement des valeurs exactes (M.E.F.) à l'exeption du premier mode
élastique.
Ces écarts entre les fréquences sont justifiés par la troncature modale d'une part et surtout par la
non prise en compte de la souplesse résiduelle SR d'autre part.
L'effet de la troncature modale est corrigé lorsqu'on augmente les modes retenus dans labase de
description. Ainsi, en passant de 6 modes libres (6L) à 9 modes libres (9L) et à 12 modes libres
(12L) retenus par plaque, on note une nette convergence des résultats de la synthèse modale vers
les valeurs exactes (M.E.F.).
Mais c'est la prise en compte de la souplesse résiduelle SR (Tableaux AS et A6) qui améliorent
davantage les résultats de la synthèse.
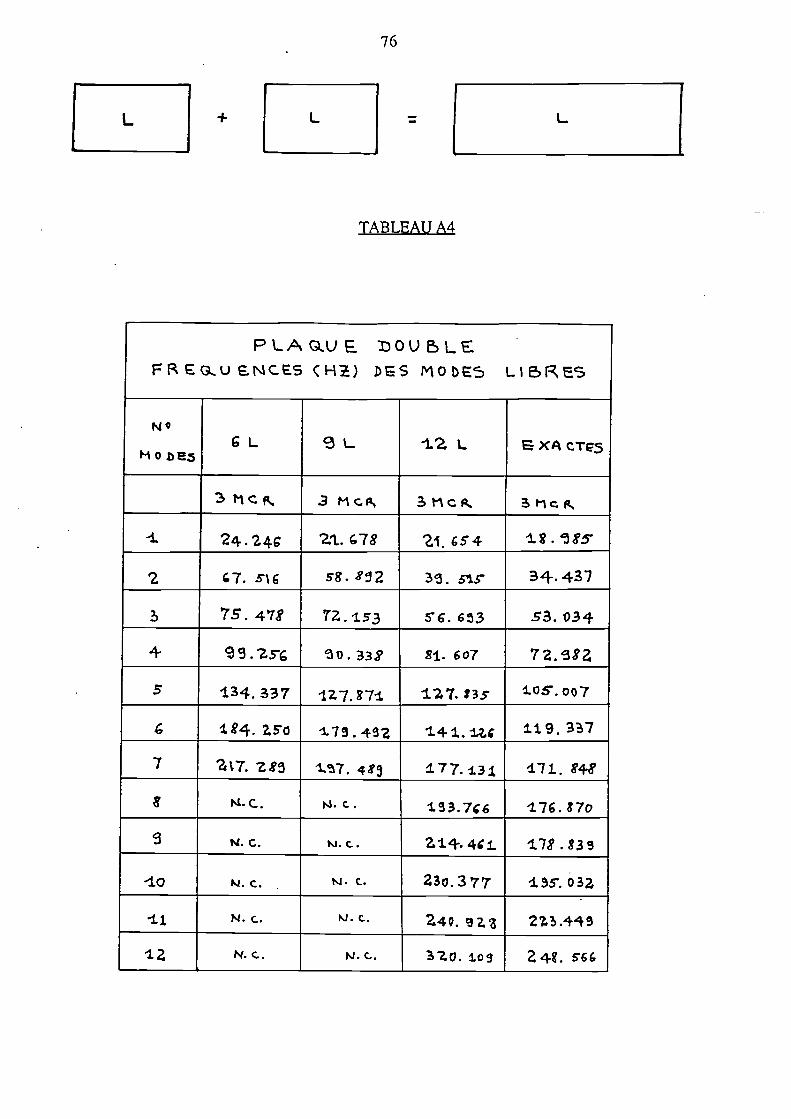
L L
76
TABLEAU A4
L
PLAcuE DOUELEFRç,.uars4cs ÇH) S MODE5 LIeRES
NO
M o bE5GL 9L 1.ZL
3Mc.
-i 24.24g 21..78 2f. 654
2 7. SG sg.8 34.437
75.47g YZ.is3 5G.63 53.034
4 '9.25 t.332 Sl. 607 72.'3Z
134.37 lZ7.7i 1.27.t35 tOg.,07
iR4.Z5o t7.4 i19.337
7 'a7. zg t7 çZ i77.j3 f71. t4'M-C.. Ñ.c. S3.7c
W. C. Kl. C.. Z14. 4j 1.78.
-10 P$.c. Kl. C.. 230.377 i5'. 032
-Li. N.C.. KI.C. 240. 2?.449
4.C.. w.c. 2c,.to9 24e. S66
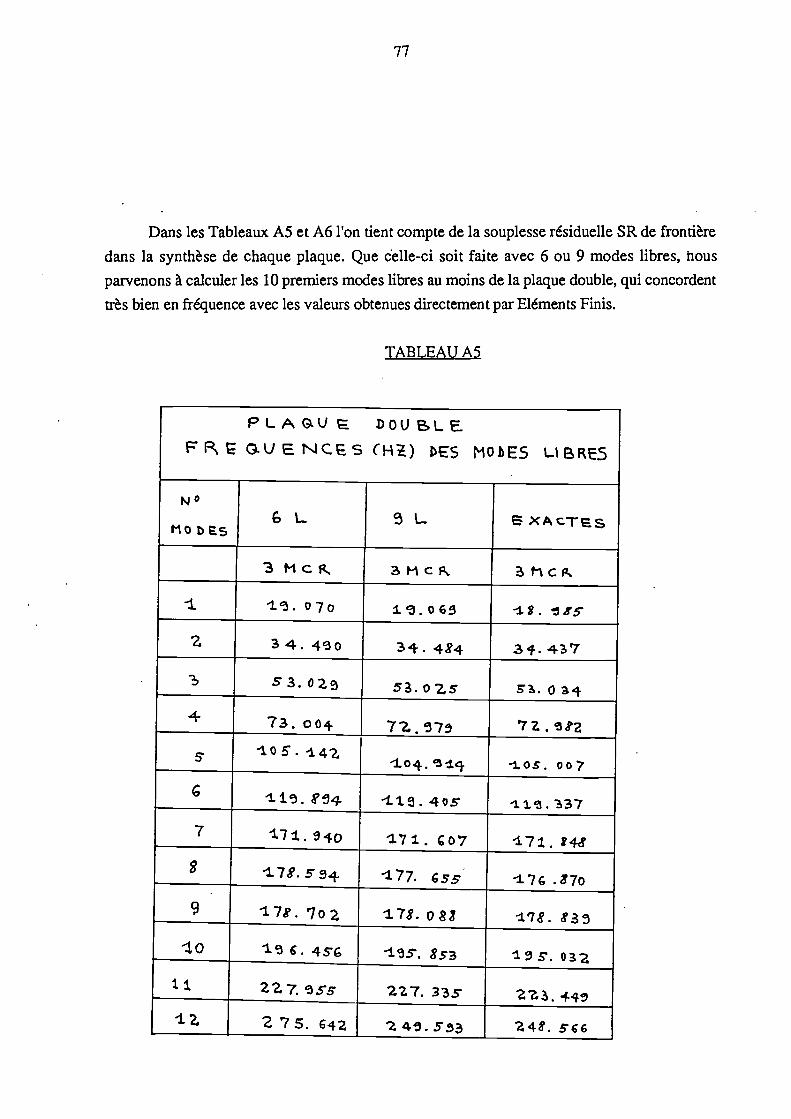
77
Dans les Tableaux A5 et A6 l'on tient compte de la souplesse résiduelle SR de frontière
dans la synthèse de chaque plaque. Que celle-ci soit faite avec 6 ou 9 modes libres, housparvenons à calculer les 10 premiers modes libres au moins de la plaque double, qui concordent
très bien en fréquence avec les valeurs obtenues directement par Eléments Finis.
TABLEAU A5
PLAG.0 'OUBLEFRG.tJENCS(H) DES MObES LBRE5
N°
MO b56 L S L XAcTE5
3hc 3McP.
-i 1.c.o7o
34.4o 34.4S4 3'.43733. 0 2. 53.o 7g . O 4
4 73.004 7Z.J1O4.t -1.05. oo7
G 1.t.40S7 71.94 i:ii. 07
g -177. G55
9 7:. 102 178. o 8. Z3
'1.0 1°J. 4sG -tes-. 8s
11 ZZ7çg 227.333IZ 2 '75. G42 24.33 248. 5-6
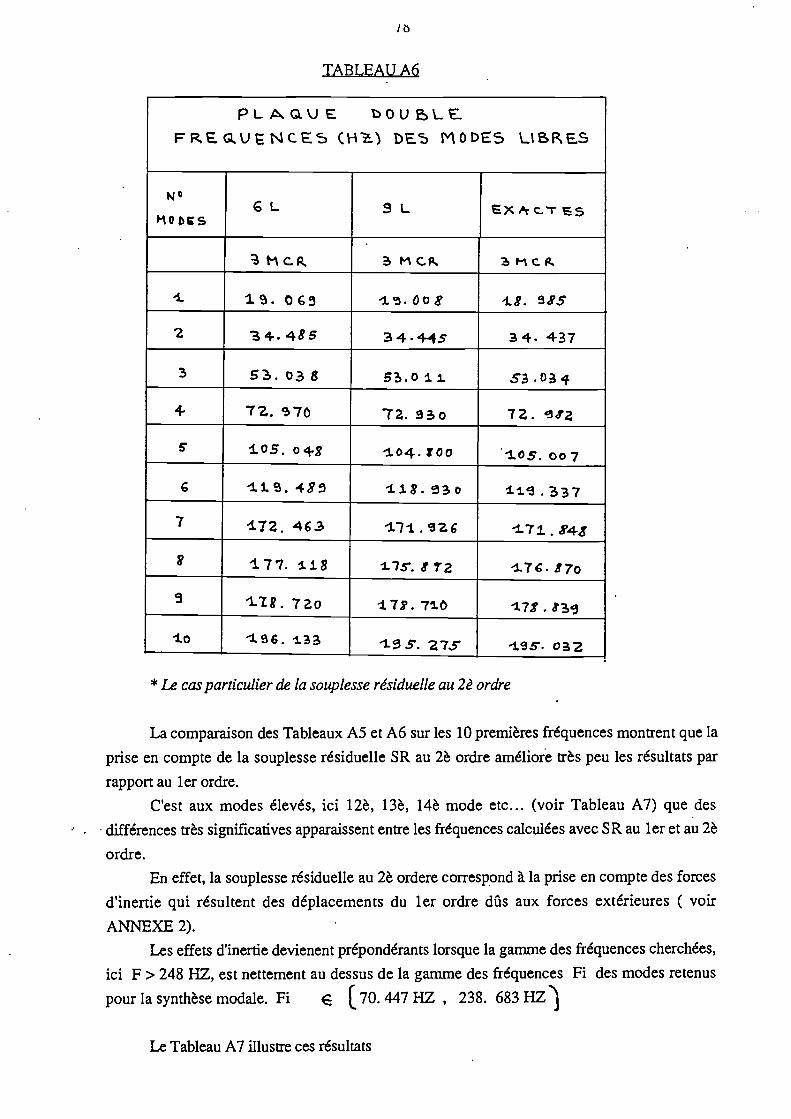
Io
TABLEAUA6
* Le cas particulier de la souplesse résiduelle au 2è ordre
La comparaison des Tableaux A5 et A6 sur les 10 premières fréquences montrent que la
prise en compte de la souplesse résiduelle SR au 2è ordre améliore très peu les résultats par
rapport au 1er ordre.
C'est aux modes élevés, ici 12è, 13è, 14è mode etc... (voir Tableau A7) que desdifférences très significatives apparaissent entre les fréquences calculées avec SR au 1er et au 2è
ordre.
En effet, la souplesse résiduelle au 2è ordere correspond à la prise en compte des forces
d'inertie qui résultent des déplacements du 1er ordre dûs aux forces extérieures ( voirANNEXE 2).
Les effets d'inertie devienent prépondérants lorsque la gamme des fréquences cherchées,
ici F> 248 HZ, est nettement au dessus de la gamme des fréquences Fi des modes retenus
pour la synthèse modale. Fi [70. 447 HZ , 238. 683 HZ
Le Tableau A7 illustre ces résultats
PLAQ.JE b0ULEFRQ.UNCES (H t MOD5 UBRES
No
P'i DSGL SL
MC.R 3MCP..
19. OG -1..00S Jj. 985
2 4.485 34.445 34.437
3 5.038 5.Oii. 53.034
4 72. 97Ó 12. 90 72. '2
iOS. og t04.IOO 007
G 'it9.4'S i18.S3o
i '172.4G3 i7i.9Z i-71.84S
177. Li3 t7s.8r i.7C.S7
ttg. 720 t7.7tÓto t96. 1.33 27$ -1.9.5. O3
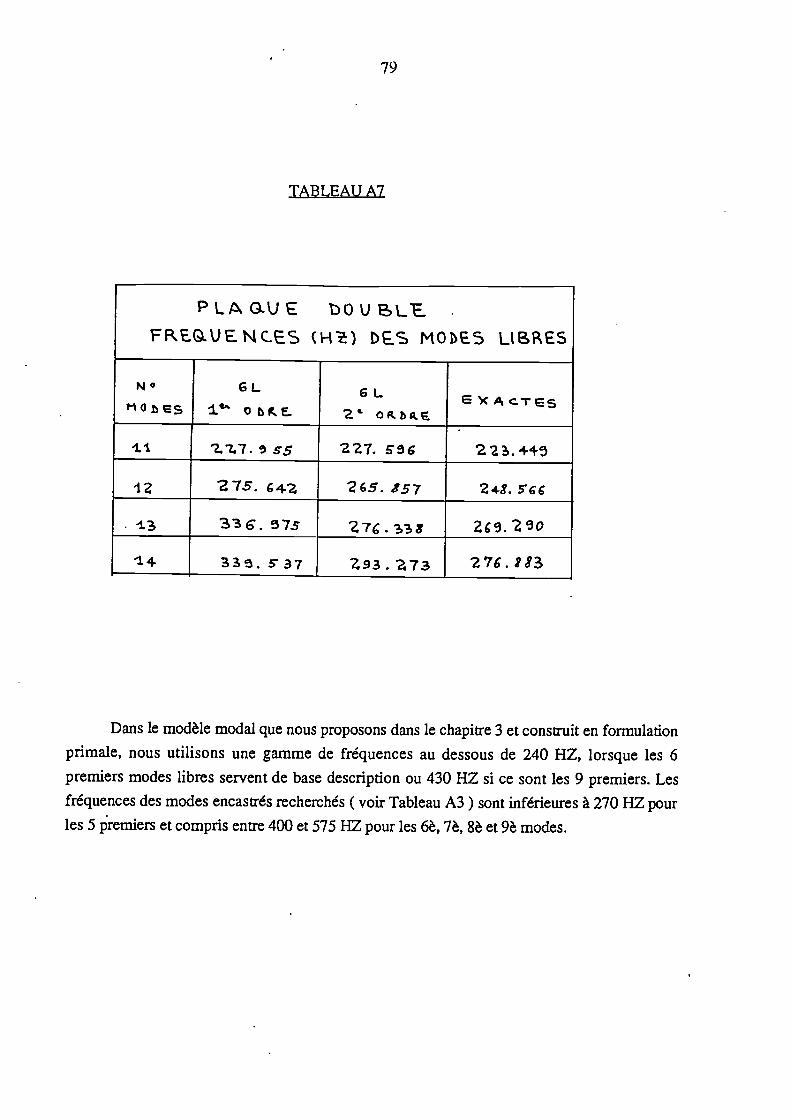
79
TABLEAU A7
Dans le modèle modal que nous proposons dans le chapitre 3 et construit en formulationprimale, nous utilisons une gamme de fréquences au dessous de 240 HZ, lorsque les 6premiers modes libres servent de base description ou 430 HZ si ce sont les 9 premiers. Lesfréquences des modes encastrés recherchés (voir Tableau A3) sont inférieures à 270 HZ pour
les 5 premiers et compris entre 400 et 575 HZ pour les 6è, 7è, 8è et 9è modes.
PLAQtJE bOUBLEFRE.Q.UENCES (H) b.S MODES UBRES
NO
MOS og6L
z' OA..bøE A CT ES
1..t 227. S96 223.44e
12 275. 4Z 265. 157 24L 5
.1.3 336.S7s 27g.3 2C.2O14 33e. 37 293273 276.U3
80
La recherche fréquencielle que nous ferons se situe dans la même gamme que les
fréquences des modes libres qui nous serviront de base de description de notre modèle modal
construit par les techniques de synthèse modale au chapitre 3.
L'utilisation de la souplesse résiduelle SR au 2è ordre ne pourra donc améliorersensiblement nos résultats de synthèse modale, d'après la comparaison des Tableaux A5 et A6
qui illustrent en fait la propriété générale selon laquelle SR au 2è ordre n'améliore pas les
résultats de synthèse au 1er ordre dans la plage des basses fréquences.
C'est pourquoi les méthodes de correction proposées au chapitre 3 ne concernent que SR
au 1er ordre, et sont destinées à apporter une amélioration importante des résultats de synthèse
modale (fréquences, réponses temporelles, ou déformées dynamiques des structures calculées)
dans une gamme de fréquences où il y a peu de différence entre le 1er et le 2è ordre dans la
réponse dynamique de la structure.
* Formulation duale
Une démarche analogue à celle qui précède a été suivie dans le cas de la formulation
duale. L'assemblage est réalisé à partir des premiers modes encastrés de deux plaques
identiques suivant le schéma:
L
A partir de 6 modes encastrés pris comme base de description pour chaque plaque, nous
avons calculé les 12 premiers modes libres de la plaque double. Les tableaux A8 et A9
correspondent respectivement à l'utilisation des termes résiduels à l'ordre zéro et à l'ordre un en
formulation duale.
II convient de remarquer le gain de précision en fréquence de 6 à 70 HZ depuis le 4ème
mode libre jusqu'au 12ème lorsque l'on tient compte des termes résiduels. Ces résultats sont
encore améliorés quand on augmente le nombre de modes encastrés retenus pour faire la
synthèse de chaque sous-structure.
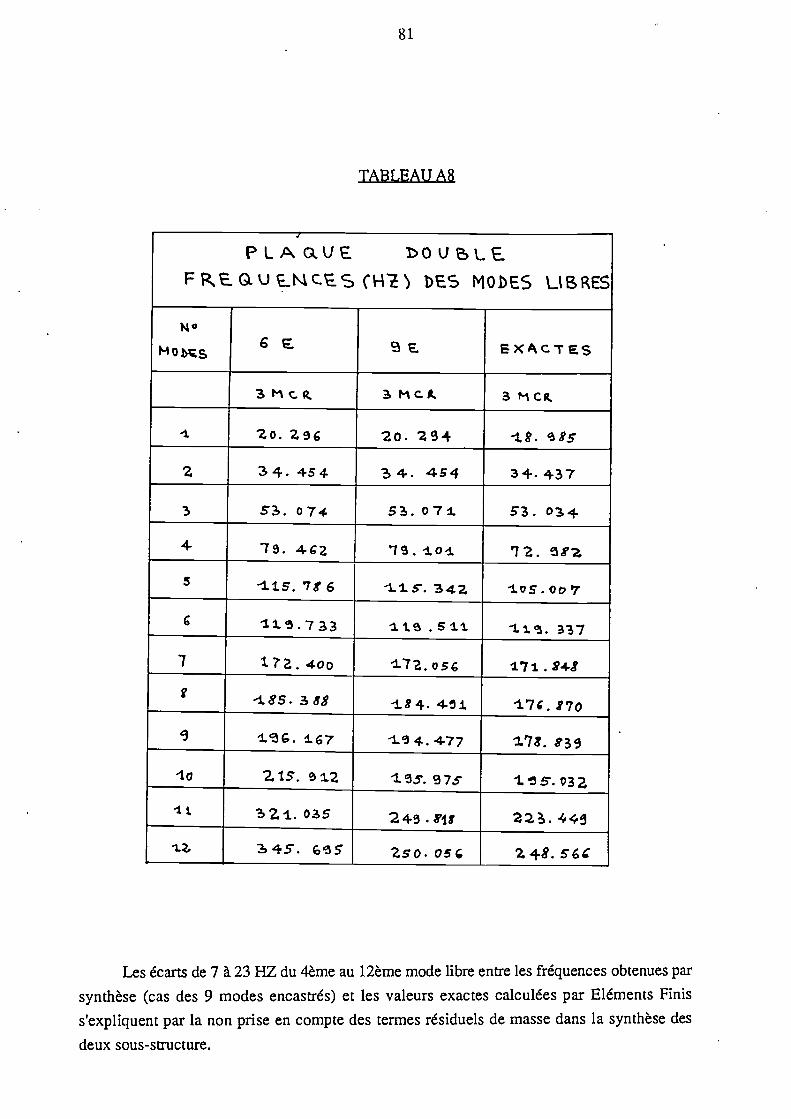
81
TABLEAU A8
Les écarts de 7 à 23 HZ du 4ème au 12ème mode libre entre les fréquences obtenues par
synthèse (cas des 9 modes encastrés) et les valeurs exactes calculées par Eléments Finiss'expliquent par la non prise en compte des termes résiduels de masse dans la synthèse des
deux sous-structure.
PLAJEbES MObES UBRES
)40
P-iObçSG E: 9E ExAcrs
3MC.& 3MC
-t 20. ZSG 20. 294 -1.8. '385
2 34. 454 34. 454 34.437
3 Ss,. 074 S?,. 07i 53. 03_q.
4- 19. 4G2 '1g.Io. '12. '2
115. 7t6 ttç.342 1.US.0c7
G '1t.733 it .S11 1.t. 377 t7.4o 't72.05C 'l'71.24-S
-tS5.368 jSq..4jj
t. j7 tS4. 477 l'i!. 839
10 215. '312 '1. 5. 97s 1. 5'. 03 Z
'lt 'Z1..OL
1.Z. 145. E,'3S 2so.o5 24S.S
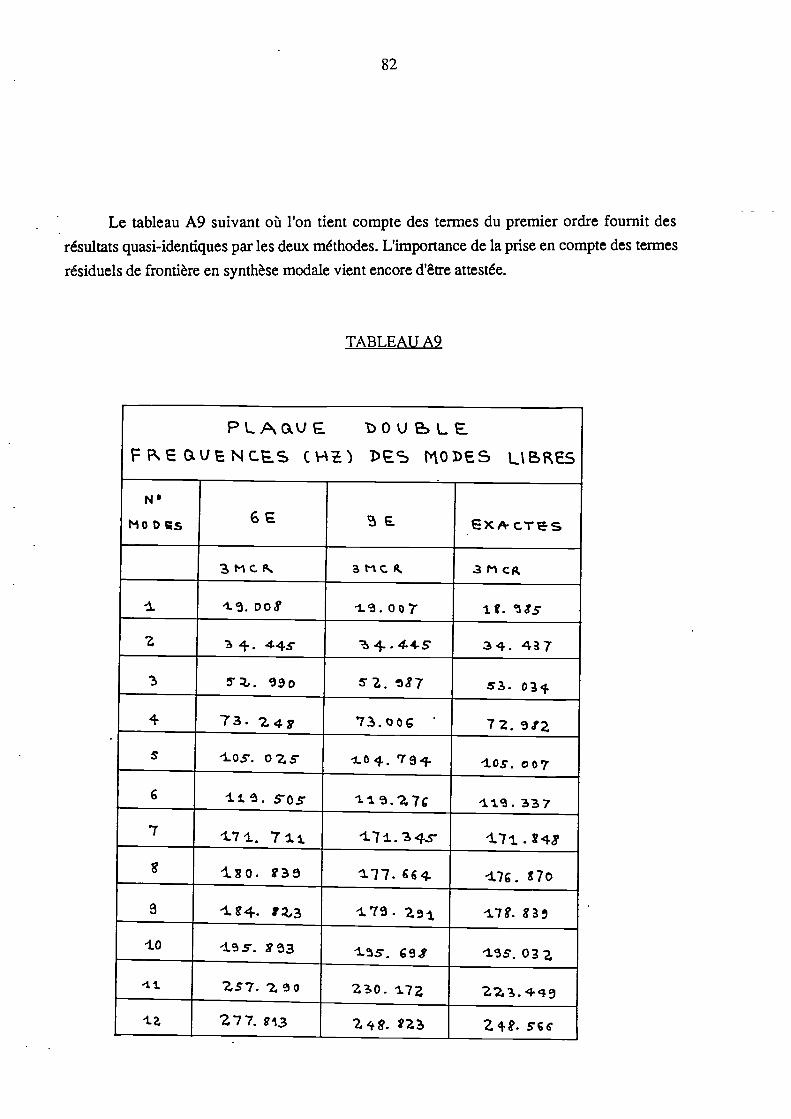
82
Le tableau A9 suivant où l'on tient compte des termes du premier ordre fournit des
résultats quasi-identiques par les deux m&hodes. L'importance de la prise en compte des termes
résiduels de frontière en synthèse modale vient encore d'être attestée.
TABLEAU A9
PLAU tOUBLE.C4) IS MO1ES LtBRS
6
3MCP. .3MCR
-j 1.9.00? -t'3.007 1f.52 . 44.ç 34.4-4.5 34. 437
. 990 5Z S74 73. 4g 73.00G 72.Js -tog. 025 'tÖ4. 91 -tog. 007
G 1.1.9. 50g 1.t9.Z7c 1.t9. 337
1.71.. 7h t7i.34s 1..1t.48g to. gs i 77. 664. -i3. t70
1.4. I2,3 1.73. 2., 1.7e. 83
1.0 -tog. 3 tag. g9, -t3s 032
-ti. 257. 2,90 20. t7 Z23.4277. gi3 2'. R23 24'. 5E
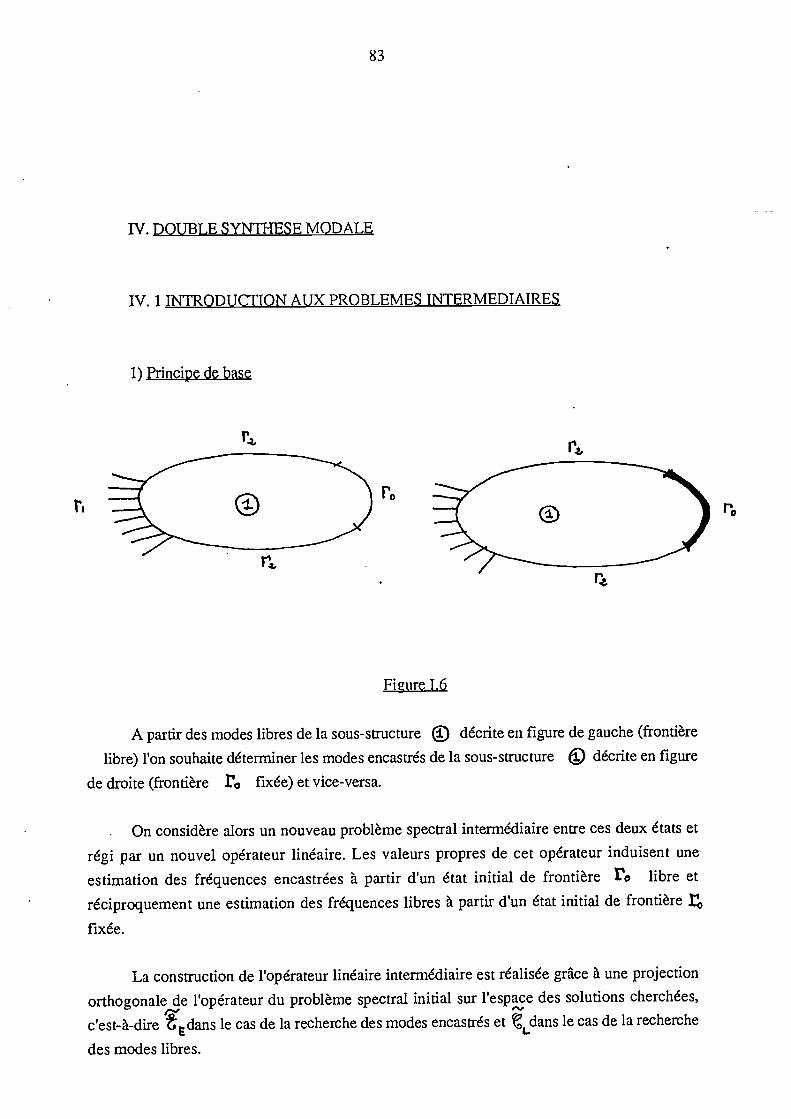
IV. DOUBLE SYNTHESE MODALE
IV. i INTRODUCTION AUX PROBLEMES INTERMEDJAIRES
1) Principe de base
83
Figure 1.6
A partir des modes libres de la sous-structure () décrite en figure de gauche (frontière
libre) l'on souhaite déterminer les modes encastrés de la sous-structure Q décrite en figure
de droite (frontière r0 fixée) et vice-versa.
On considère alors un nouveau problème spectral intermédiaire entre ces deux états et
régi par un nouvel opérateur linéaire. Les valeurs propres de cet opérateur induisent une
estimation des fréquences encastrées à partir d'un état initial de frontière r0 libre et
réciproquement une estimation des fréquences libres à partir d'un état initial de frontière
fixée.
La construction de l'opérateur linéaire intermédiaire est réalisée grâce à une projection
orthogonale de l'opérateur du problème spectral initial sur l'espace des solutions cherchées,
c'est-à-dire dans le cas de la recherche des modes encastrés et Çdans le cas de la recherche
des modes libres.
par:
(1.225) Ç'L1,.r) = (ç.A.J)
Sa restriction à l'espace L amputé des modes de corps rigides vérifie
(1.226)
84
2) Définition des problèmes intermédiaires
En formulation basée sur le champ de déplacement on considère l'opérateur b défini
(t,A.P) Çt'v) V
Les conditions cinématiques suivantes sont liées à
(1.227) Bl. t&. O t st.j. «r'
Afin de déterminer les pulsations de résonnance & de la sous-structure ®encastrée, c'est-à-dire lorsque celle-ci doit vérifier les conditions cinématiques supplémentaires
à l'équation (1.226), c'est-à-dire
(1.228) 0 L e t'i,
on introduit le complémentaire orthogonal de , sous-espace fermé de au sens du
produit scalaire . Ce nouvel espace est noté J'L , soit:
(1.229) EEE
Dans l'espace L privé des modes de corps rigides, le produit scalaire
permet également de construire un espace similaire JVj , soit:
(1.230) & %L'espace J1L est construit grâce aux fonctions 'r solutions des problèmes
pseudo-statiques suivants:
(1.231) t ('i' v-) -I- ,
85
Le théorème de LAX-MILGRAM assure l'unicité de la fonction pour chaque
distribution de force f . Cet ensemble de fonction est dense dans
Comme l'influence des modes de corps rigides entraîne le choix de ou
comme espace de description, il est intéressant de considérer la projection de la solution
sur l'espace p des modes de corps rigides, au sens du produit scalaire (e ') . Soit la
décomposition
(1.232) EE' #
on obtient
(1.233) .= 4. E
où ft est la projection de L dans p.
Soit l'espace de dimension finie engendré par & solutions indépendantes
de l'équation (1.231) et l'opérateur de projection sur cet espace au sens du produit
scalaire '::ç. ,.) de
Le problème intermédiaire primal d'ordre désigne la recherche du spectre de
l'opérateur projeté dans le complémentaire orthogonal de
.J(I.234.a) U k
avec
(I.234.b) t3' I -
() (
Les valeurs spectrales 1. / W de l'opérateur (J &
donnent des estimations co par défaut des pulsations de résonnance W des
modes encastrés calculés en considérant les conditions cinématiques (1.228)
(1.235) - - - -(Çj ft) -- w
et
r'. 2. (Pt)(1.236)
()(c-4i: - - )
d'après les principes de monotonie et de MIN-MAX de WEINSTEIN.
D'une façon similaire à la formulation en déplacement, la formulation en force repose sur
l'opérateur défini par l'équation
(1.237) r1 c. (,r /
L'opérateur E a le même spectre que E , mais en plus la valeur propre '1$ -i.
de multiplicité infinie en général.
On définit des espaces de projection à partir des solutions faibles des problèmes
suivants:
(1.238) Z (.
86
=
On introduit le complémentaire orthogonal de l'espace "-CL , sous-espace fermé de
au sens du produit scalaire Z Ç. , . Ce nouvel espace est noté J1 , soit:
(1.239) L E9 J
Les déjcements généralisés de frontière ci. appartiennent à l'évidence à l'espace
des traces r0 . Et l'espace engendré par les solutions associées à des
déplacements L de L C r0') est dense dans le sous-espace
Afin de mettre en évidence l'influence des champs de contrainte statiquement équilibrés,
il convient de considérer la projection de la solution C sur l'espace , au sens du
produit scalaire élastique c ( ') . Soit la décomposition
(1.240) = .
où est la projection de E dans , d'où la décomposition
(1.241)= -t-
.Qk :
6e c
Le problème intermédiaire d'ordre correspond à la recherche du spectre de l'opérateur E
projeté dans le complémentaire orthogonal de jJ :
-(k)Y
L'indépendance des fonctions de contraintes i assure la convergence des problèmes
intermédiaires vers le problème libre.
(1.243) IL
où l'opérateur E L. vérifie l'équation
.-- f_-.(1.244) - C L -'i = C (a-, ) E
L'opérateur EL a pour vecteurs propres les champs de contraintes A. 'XL
associés aux modes libres et pour valeurs propres (i. + cJ L ) :
3) Résolution des problèmes intermédiaires
La résolution des problèmes intermédiaires d'ordres,.. consiste à déterminer le spectre
des opérateurs projetés J & D U f et 'I L L. V respectivement dans les
formulations primale et duale. Les deux équations aux valeurs propres (I.234.a) et (I.242.a)
peuvent en effet être rattachées au problème intermédiaire du premier type de WEINSTEIN et à
l'équation intégrale de FREEDOHLM de première espèce. Il devient alors possible d'exprimer
la solution U,. ou 6' en fonction de la résolvante de l'équation intégrale en formulation
primale ou duale.
87
Soit J'J l'espace de dimension finie engendré par L solutions indépendantes.
On considère l'opérateur '7ç de projection sur cet espace au sens du produit scalaire
(I.242.a) W E Wç2 r =
où
(I. 242. b) k=
1V. 2 FORMULATION PRIMALE
1) Equation intégrale de FREEDOHLM et déterminant de WEINSTEIN
Le problème spectral (I.234.a) peut s'écrire
,(1.245) U-
En tenant compte de la relation (I.234.b), l'égalité (1.245) devient:
(Pt) t-..,(1.246) = b '.A.. -
La multiplication par % des deux membres de cette équation donne
(I.247.a)
et
(I.247.b)
L'équation (1.245) s'identifie à un problème intermédiaire du premier type deWEINSTEIN que l'on écrit
(1.248) k. -
et
- e-(1.249) - C4) -i
Le déplacement cherché est obtenu par l'équation intégrale de FREEDOHLM (1.248) et
s'exprime en fonction des forc généralisées &
(1.250)
est la résolvante de l'équation (1.248). C'est un opérateur compact défini par
(1.251)
T=o
88
Les pseudo-fréquences
de WEINSTEIN
(1.254)
2) Grandeurs généralisées
èOn détermine les forces généralisées ¿tc associées à la j ème solution propre en
utilisant l'équation (1.249) relative au jième mode encastré qu'on multiplie
scalairement par
(1.255) C
89
Comme la solution v.. doit appartenir au complémentaire orthogonal de au sens
de la métrique de L , on peut écrire
(1.252) U. - = o E. Ç.t,
où ces équations de contrainte équivalent aux deux conditions (I.247.a) et (I.247.b)
L'écriture de la solution tA... d'après la relation (1.250) jointe aux .. équations de
contrainte donne
(I.253.a) I% t\ o
avec
(I.253.b) S
f-kA S(u)o
(ft)1-:
sont donc les valeurs qui annulent le déterminant
En utilisant l'équation (1.248), le premier membre de l'expression (1.255) s'écrit:
- (&) (Ç) .%_'(1.256) Çio rcar
(&)(1.257) - Q.') ...o
s'écrit
Comme l'on a
'-s.(1.258) & () )(Eò x.
,
et si on pose successivement
(I.259.a)
et
(I.259.b)
l'équation (1.255) devient donc
(1.260)
(I.261.a) .t =
où
(I.261.b)
(1.263)
.1
90
(L
I
L'indépendance des 2. rend ce système matriciel inversible et on obtient
Les déplacements généralisés associés aux forces généralisées
(1.262) = (LA.,
-=_wt; so
r.'.SoL Ek
k
'stE
Grâce à l'équation de définition (1.231) des fonctions de contrainte
sont définis par
Le déplacement généralisé est donc la projection de la solution u. dans l'espace J"i'L
91
3) Influence des modes de corps rigides
Dans un contexte expérimental, il est intéressant de mettre en évidence l'influence
particulière des modes de corps rigides au cas où la sous-structure en possède. En effet
l'opérateur de base' ne traduit pas le comportement réel de la strcture. On introduit alors la
résolvante de l'opérateurD défini dans L , soit:
(1.264) . = .1 - (A)
On définit alors de nouvelles fonctions 2 , déformées associées aux distributions de
force . et solutions faibles des problèmes statiques:
(1.265)
Le lien entre et D induit
-% . -(1.266) L i: p
,
Grâce à l'équation (1.233) et le produit scalaire Ç (. , , les coefficients du
déterminant de WEINSTEIN s'écrivent:
(1.267) ScL - s
Les projections f des dans l'espace p. vérifient
(1.268)
(1.269)
d'où
(1.270)
où
= f:, B'>
r')
On établit facilement dans l'espace l'équation
- i__. V.
(w -
j4.rc. L
t_ Ççc'1 P)Cj

92
(1.271) (w) = PSP(
En présence des modes de corps rigides, les pulsations de résonance du problème
intermédiaire d'ordre k sont solutions de l'équation
(1.272) kk q (t.,) ç
Plusieurs algorithmes permettent de résoudre numériquement ce problème, relativement
mal conditionné à cause de la présence des modes de corps rigides. Mais dans certains cas de
forme particulière de (w) , cette équation (1.272) pourra se mettre sous une forme
matricielle standard de problème aux valeurs propres
(1.273) K . =où jÇ et 1>4. sont deux matrices carrées de même dimension.
Les algorithmes de VASERSTEIN (ß 48) , DAWSON 4'S) ou
SIMSON (ß..4s Rk R.4 ) pourront être utilisés avantageusement.
On peut remarquer que si la structure est entièrement libre et possède donc modes de
corps rigides, les déformées statiques £ sont les projections dans L des déformées
statiques obtenues en appliquant la distribution de forces de frontière et en imposant 't
contraintes.
L'équation (1.272) sépare clairement l'influence des modes élastiques de lasous-structure © et la participation des modes de corps rigides si elle en possède. Il convient
donc de faire une étude spécifique de la souplesse S(u,) dans l'espace f
4) Résolvante R_ dans l'espace L.
Cette étude des résolvantes est l'extension en cas continue des résultats établis en
formulation discrète dans la deuxième partie de ce chapitre.
On vérifie aisément:
(1.274) = I + t
On en déduit la matrice de souplesse dynamique S
(1.275) k Ç -. (-
Dans l'égalité (1.274), l'opérateur T R. est la résolvante de FREEDOHLM qui se met
sous la forme intégrale.
(1.276)
Mais ce noyau de GREEN est difficilement accessible dans le contexte expérimental. II
devient alors nécessaire d'utiliser la base modale des modes libres C L , orthogonale et
complète dans l'espace L , pour déterminer la résolvante.
D'autre part, il est très utile de disposer d'expressions de la résolvante qui pourraient
compenser l'influence négative de la troncature modale sur le comportement dynamique de la
structure obtenue par synthèse.
5) Troncature de la résolvante
L'équation (1.270) a permis d'isoler les modes de corps rigides pour étudierspécifiquement l'expression de la résolvante R.. de l'opérateur
Comme la solution l.A. s'écrit:
(1.277) .R..I t
il devient nécessaire d'exprimer J. ? solution de:
(1.278) t - cdL )
Comme en formulation discrète, et en accord avec la définition des problèmes
intermédiaires, on introduit l'opérateur projection 'T. sur les 'fl.. premiers modes libres
déterminés expérimentalement. L'équation (1.27 8) devient:
93
(j1.% 2
où le noyau résolvant tw (ti. , se calcule en fonction du déterminant de
FREEDOHLM en utilisant le noyau de GREEN , (. (M1)) de D
(I.279.a) [i :1) u c =
où
(I.279.b) 1j-.n. -
La solution PP a pour expression dans la base des modes libres
(1.280) RP =
(1.282)
94
Les 'n. modes libres déterminés induisent les composantes matricielles suivantes:
(I.281.a)'I. Lo/WL
où
(I.281.b) otò ,C )
Soit &v. l'espace formé par les 'rt modes libres Xj , Ç e . Les modes
non pris en compte forment un espace orthogonal à j , au sens du produit scalaire (t., ')Soit cet espace, on a la décomposition
Les différentes méthodes de troncatures seront définies par les diverses formes de la
partie secondaire de D , c'est-à-dire b, tYi. DUI. , opérant dans l'espace f'* Troncature du type RAYLETGH-RIÍFZ
Comme en formulation discrète, cette troncature correspond à négliger ], par rapport à
rr
(1.283) D0 O
Le spectre de D se résume donc à celui de sa composante T D 'rk..
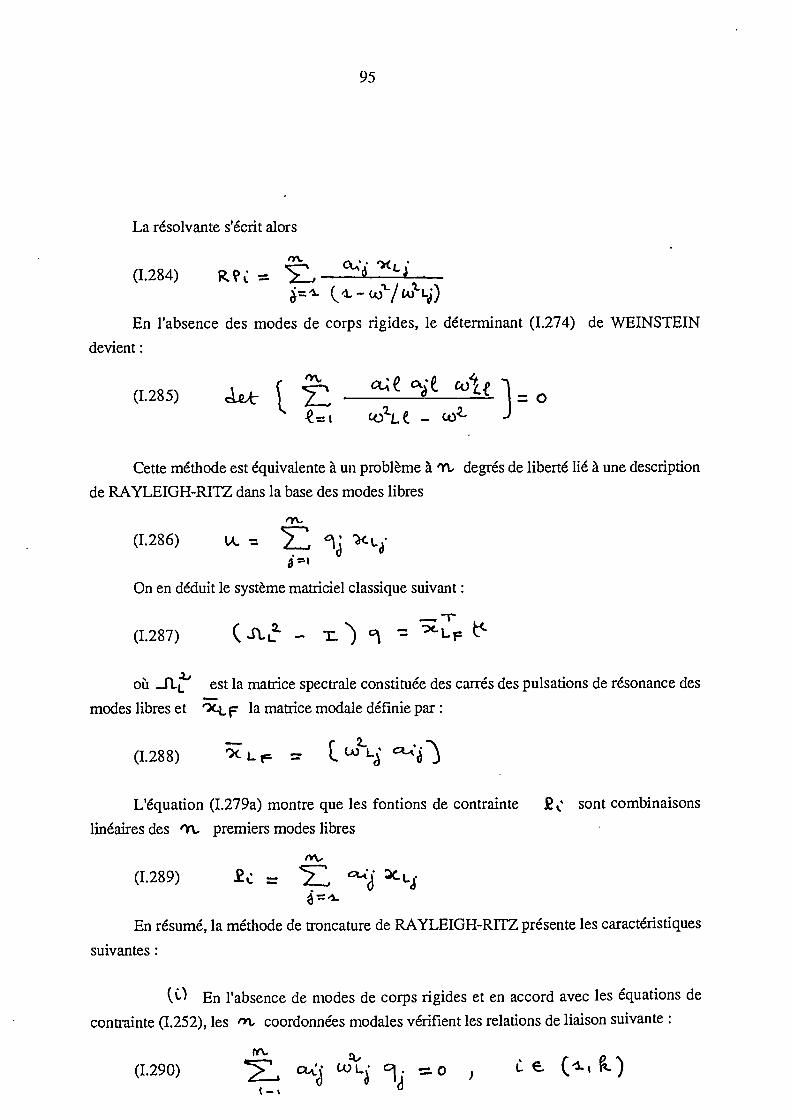
La résolvante s'écrit alors
(1.284)Xj
En l'absence des modes de corps rigides, le déterminant (1.274) de WEINSTEIN
devient:
(1.288)
95
Cette méthode est équivalente à un problème à 'n- degrés de liberté lié à une description
de RAYLEIGH-RITZ dans la base des modes libres
(1.286) :i: 0
On en déduit le système matriciel classique suivant:
(1.287) (St1- - i.) 9
L'équation (I.279a) montre que les fontions de contrainte 2 sont combinaisons
linéaires des 'n. premiers modes libres
(1.289) :zL
En résumé, la méthode de troncature de RAYLEIGH-RITZ présente les caractéristiques
suivantes:
( En l'absence de modes de corps rigides et en accord avec les équations de
contrainte (L252), les vt. coordonnées modales vérifient les relations de liaison suivante:
(1.290) (.4) Cl o )
ou JL1 est la matrice spectrale constituée des carrés des pulsations de résonance des
modes libres et '-L F la matrice modale définie par:
(1.28 5) cLQk
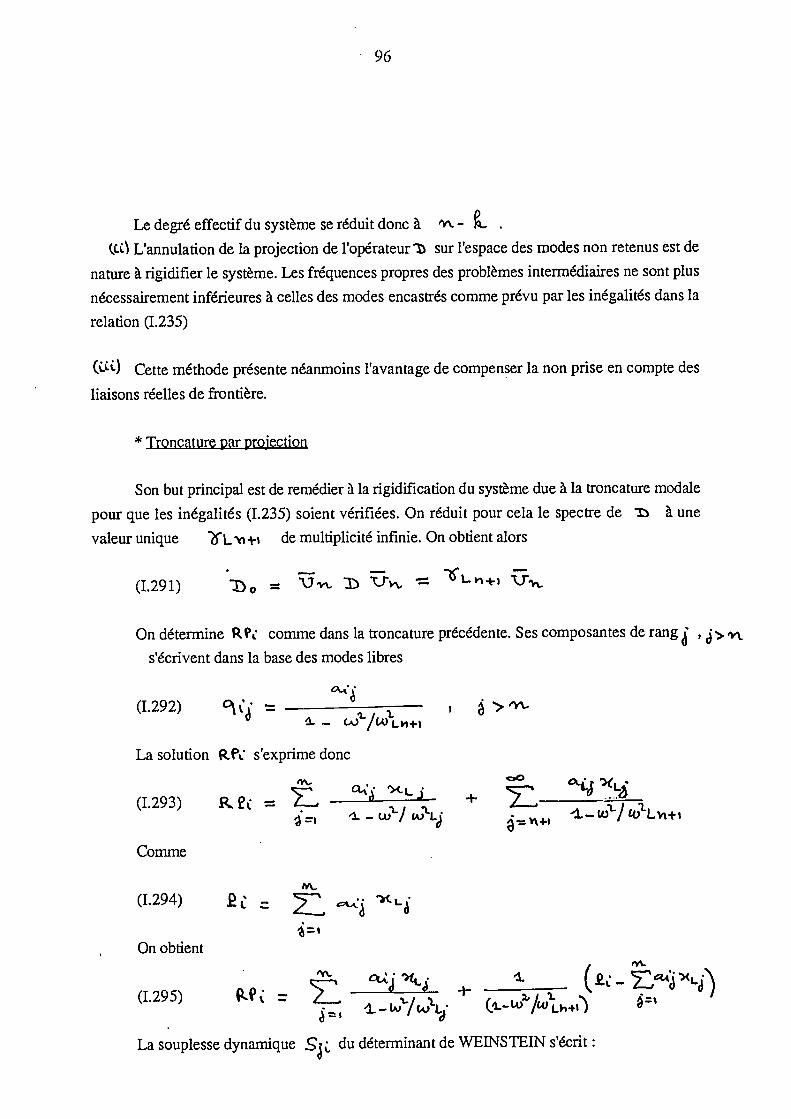
(1.292) -
Le degré effectif du système se réduit donc à 'v' - L(C.C. L'annulation de la projection de l'opérateur sur l'espace des modes non retenus est de
nature à rigidifier le système. Les fréquences propres des problèmes intermédiaires ne sont plus
nécessairement inférieures à celles des modes encastrés comme prévu par les inégalités dans la
relation (1.235)
() Cette méthode présente néanmoins l'avantage de compenser la non prise en compte des
liaisons réelles de frontière.
* Troncature par projection
Son but principal est de remédier à la rigidification du système due à la troncature modale
pour que les inégalités (1.235) soient vérifiées. On réduit pour cela le spectre de r à une
valeur unique ìyj-t de multiplicité infinie. On obtient alors
On détermine R. P comme dans la troncature précédente. Ses composantes de rang
s'écrivent dans la base des modes libres
La solution Rf s'exprime donc
(1.293) R.c = LJ_W/v'Lj
Comme
(1.294) -
On obtient
(1.295)s=I
La souplesse dynamique S du déterminant de WEINSTEIN s'écrit:
.'iU/tvL+t
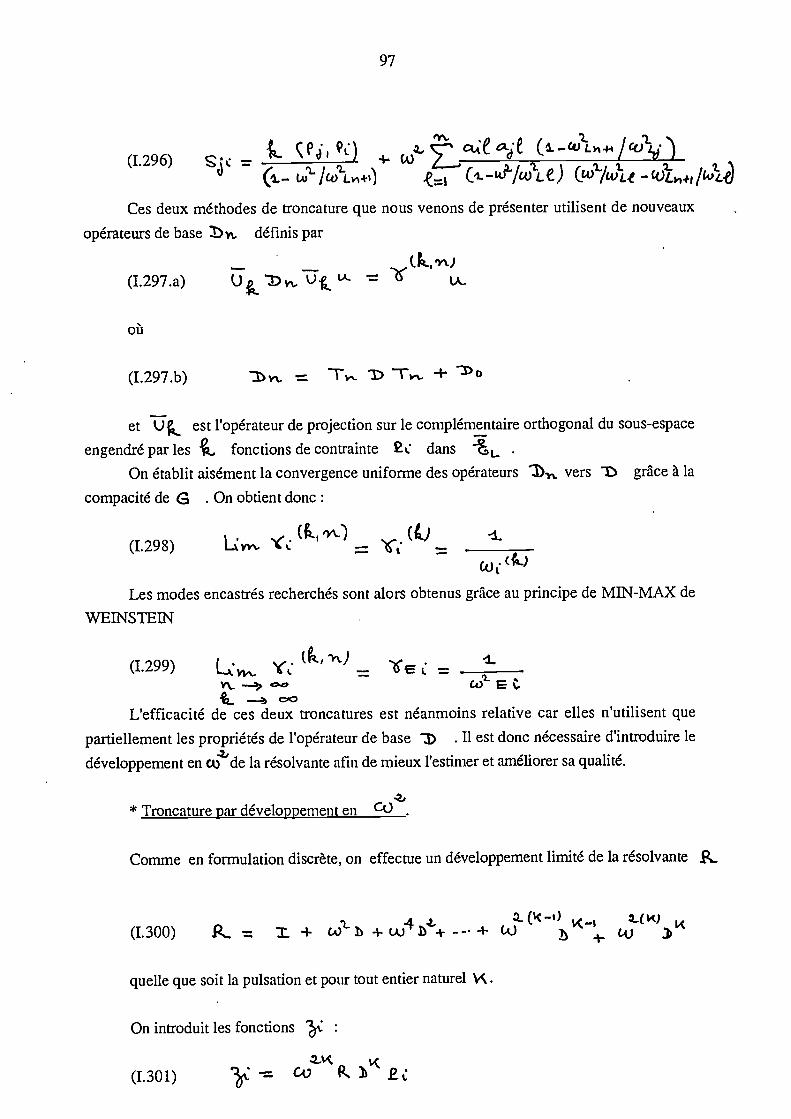
97
- ài9') .tCcj (t_cvi/cv\j
(1.296)
.(L_U3./wtLe) (wt/w
Ces deux méthodes de troncature que nous venons de présenter utilisent de nouveaux
opérateurs de base définis par
(k,(I.297.a) A.
où
(I.297.b) T. + o
et iJç est l'opérateur de projection sur le complémentaire orthogonal du sous-espace
engendré par les ,. fonctions de contrainte dans LOn établit aisément la convergence uniforme des opérateurs 't. vers Th grâce à la
compacité de G . On obtient donc:
(1.298) L' Vt. =c'jc
Les modes encastrés recherchés sont alors obtenus grâce au principe de MIN-MAX de
WEINSTEIN
(1.299) L v .= =C.
L'efficacité de ces deux troncatures est néanmoins relative car elles n'utilisent que
partiellement les propriétés de l'opérateur de base i . Il est donc nécessaire d'introduire le
développement en c&i'de la résolvante afin de mieux l'estimer et améliorer sa qualité.
* Troncature par développement en
Comme en formulation discrète, on effectue un développement limité de la résolvante
(1.300) I + b + w4 I+ - -. + W((-'
tt) )
quelle que soit la pulsation et pour tout entier naturel Ç.
On introduit les fonctions y
(1.301)

3j' s'écrit dans la base modale
(I.302.a)
où
(L302.b)
La résolvante s'écrit alors:
(Ks)(1.303) QJ' Pt.j'3jPi- -+ b -
Le
Les fonctions doivent atténuer l'influence de la troncature modale.
Les termes dans le déterminant de WEINSTEIN (1.271) deviennent
s'cr. . - -d' w .L bft'\+ - -
.2. (1k') (c-)(1.304) + W & ( , +
(1.305 .a)
(I.305.b)
=
_w1(ALes)%
avec les matrices symétriques suivantes calculées aisément.
98
2.
11kI)(i.._w /WLO
Co L
U= CGNP GÑP
P ( b" P131 be" f)
On introduit ensuite les déformées résiduelles suivantes pour mettre en évidence les
participations des modes non retenus:
(1.306) = - fi L e
L'équation (1.303) donnant it. 2 ¿ devient

Q11-(1.307) = E, C r + 'J Ctj' (t_ Cv/ IVtLY
La matrice de souplesse dynamique prend alors cette forme:
(1.308)
Grâce à l'égalité
(1.309) & (2e'
On établit les relations suivantes
(I.310.a)
(L310.b)
Il = o
s
99
D'une façon générale, l'introduction des déformées statiques induit une bonne estimation
du spectre des problèmes intermédiaires quelle que soit la troncature utilisée.
Dans le développement en , la série R converge uniformément et absolument
quand 'n.. tend vers cO pour des opérateurs 1) de classe inférieure ou égale à , le cas
des problèmes classiques de Dynamique des structures.
Néanmoins, on se limitera souvent au premier ordre, c'est-à-dire à = & dans les tests
numériques ou expérimentaux.
6) Résumé des quatre modèles de base
* Modèle 1: RAYLEIGH-RITZ
On ne tient pas compte de la flexibilité résiduelle de frontière. D'où
-(,= SC(.(A
+ -J'LJL (W/vtL)'t
ktvä
1. t. -.L'I'-
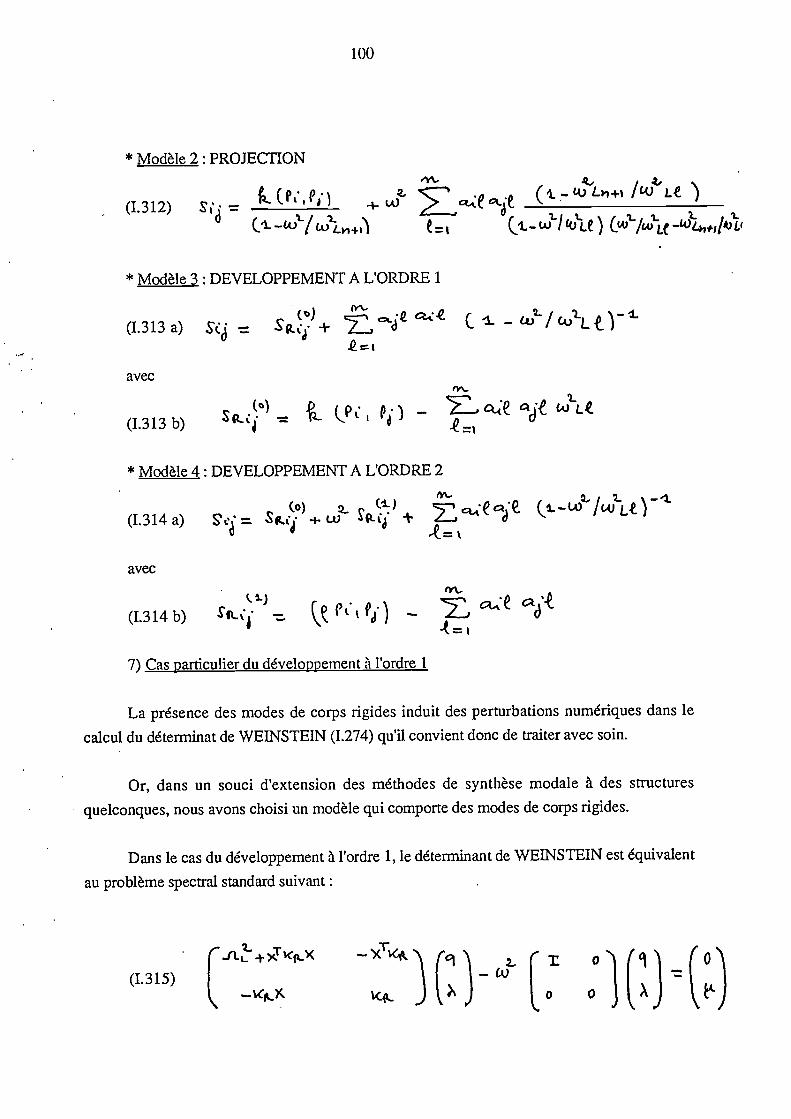
* Modèle 2: PROJECTION
--w(1.312)
=
avec
(1.3 14 b)
7) Cas particulier du développement à l'ordre I
La présence des modes de corps rigides induit des perturbations numériques dans le
calcul du déterminat de WEINSTEIN (1.274) qu'il convient donc de traiter avec soin.
Or, dans un souci d'extension des méthodes de synthèse modale à des structuresquelconques, nous avons choisi un modèle qui comporte des modes de corps rigides.
Dans le cas du développement à l'ordre 1, le déterminant de WEINSTEIN est équivalent
au problème spectral standard suivant:
loo
* Modèle 3: DEVELOPPEMENT A L'ORDRE i
(b)L313 a) SC + (_ Cu/ Co t r -
avec
()(1.313 b) & (Y P)
* Modèle 4: DEVELOPPEMENT A L'ORDRE 2
(o) L(I.314a) 4W
wt/ cou) (VJ'/W'L 41+'/&U
- 2 -1.(t-W I"JL.')
c\ L t O ('V' o\j(_w I oAJ)
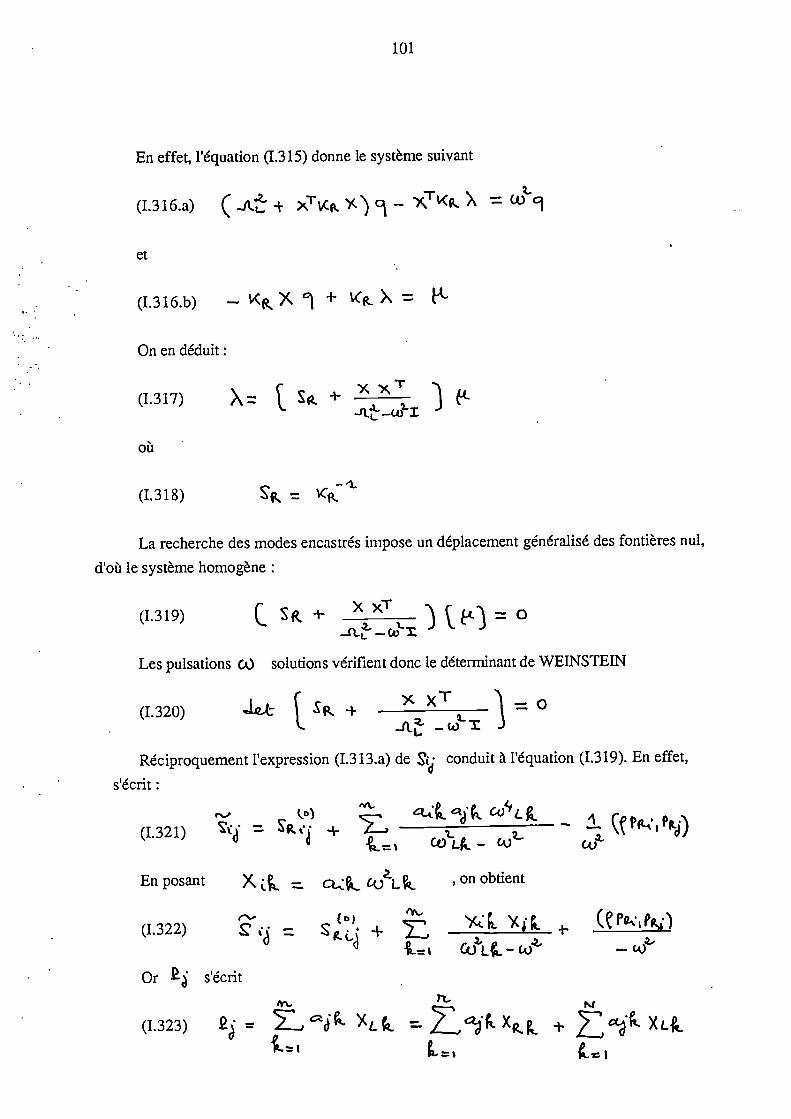
La recherche des modes encastrés impose un déplacement généralisé des fontières nul,
d'où le système homogène:
(1.319) LX T
Les pulsations CO solutions vérifient donc le déterminant de WEINSTEIN
(1.320)X XT o
L J
Réciproquement l'expression (1.3 13.a) de conduit à l'équation (1.3 19). En effet,
s'écrit:
(o)
(1.321) = + ,t& ¶ & L &
(Ç Pß.'Pj)CO( -
En posant X . cu.,.. COZLÇL , on obtient
(1.322) - + ')(..Ç
3_=I L&cIOr s'écrit
(1.323) 2j = LtXç 0jkX +
101
En effet, l'équation (L3 15) donne le système suivant
(I.316.a) (ii + ) -et
(I.316.b) - X + t< X =
On en déduit:
(1.317) > S s+ X X1'
Ji.f:-w r
où
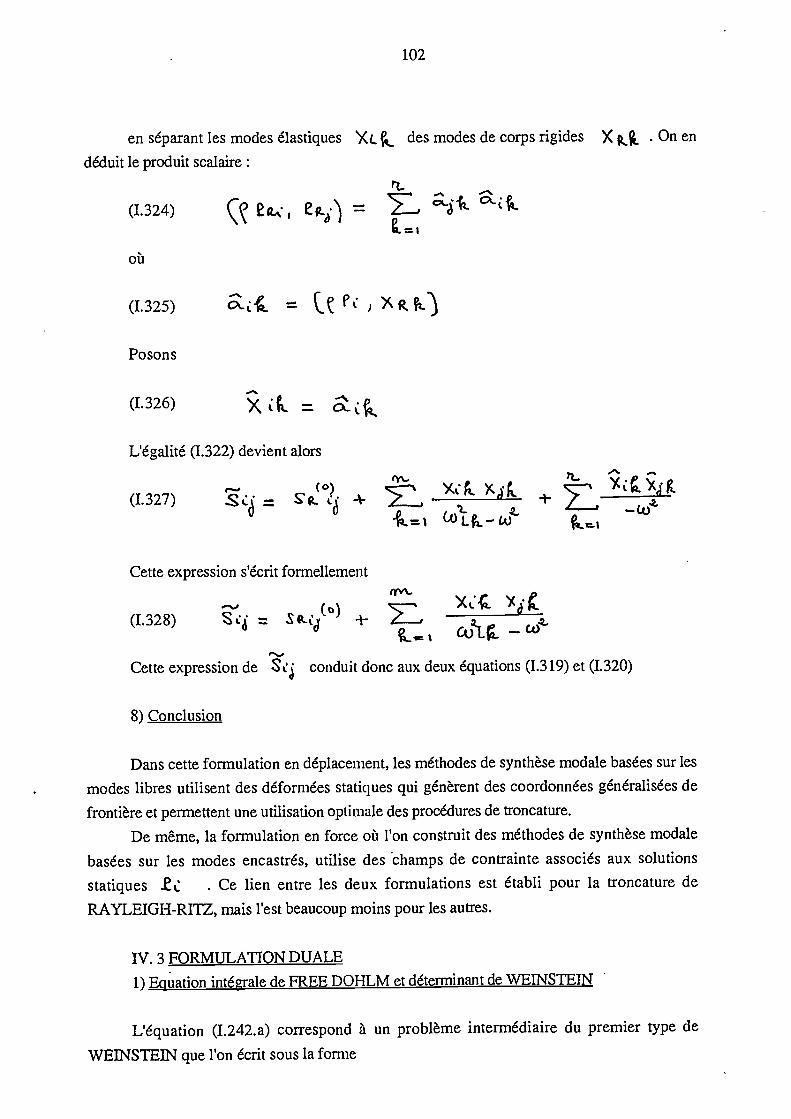
102
en séparant les modes élastiques (i Ç. des modes de corps rigides X pj . On en
déduit le produit scalaire:
(1.324) Ç = L ak
où
(1.325) Pt
Posons
(1.326) =
L'égalité (L322) devient alors
lt '(1.327) = + y-', Xk )(
+ y-', -&% Co'tç.tJ
Cette expression s'écrit formellement
()(1.328) +_
Cette expression de conduit donc aux deux équations (1.319) et (1.320)
8) Conclusion
Dans cette formulation en déplacement, les méthodes de synthèse modale basées sur les
modes libres utilisent des déformées statiques qui génèrent des coordonnées généralisées de
frontière et permettent une utilisation optimale des procédures de troncature.
De même, la formulation en force où l'on construit des méthodes de synthèse modale
basées sur les modes encastrés, utilise des champs de contrainte associés aux solutions
statiques .ec . Ce lien entre les deux formulations est établi pour la troncature de
RAYLEIGH-RITZ, mais l'est beaucoup moins pour les autres.
W. 3 FORMULATION DUALE
1) Equation intégrale de FREE DOHLM et déterminant de WEINSTEIN
L'équation (I.242.a) correspond à un problème intermédiaire du premier type de
WEINSTEIN que l'on écrit sous la forme
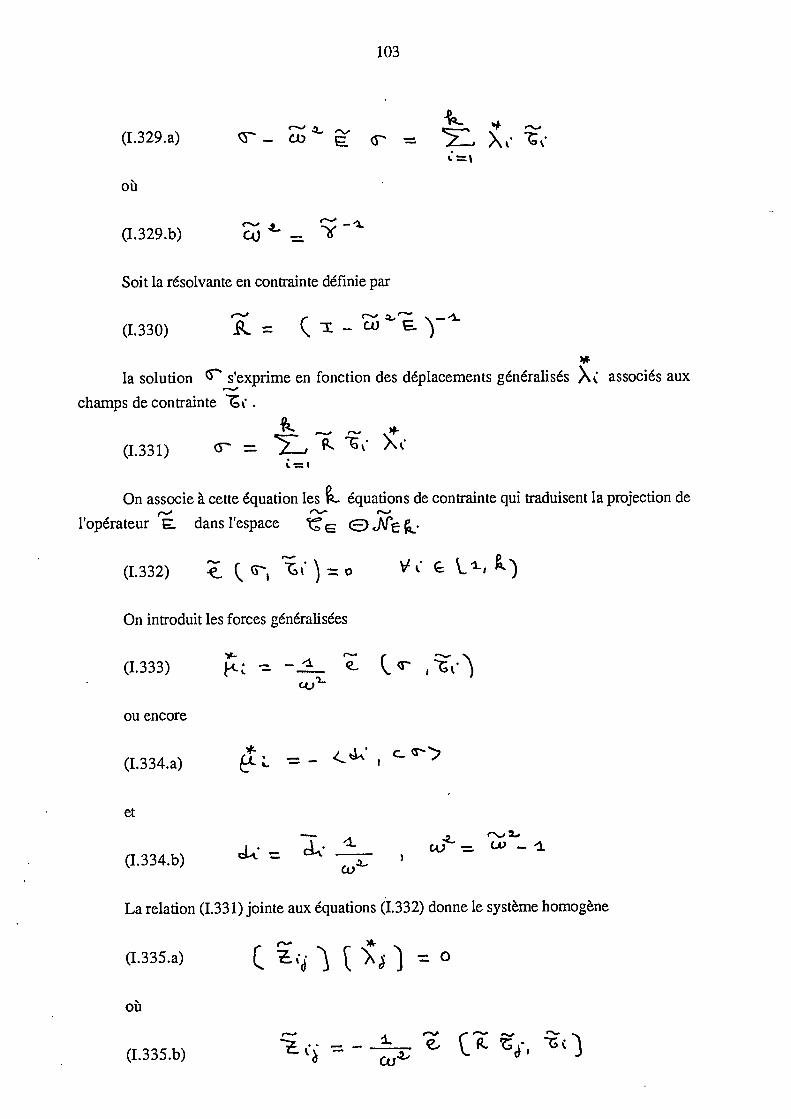
(I. 3 29 .a)
où
(I.329.b)
Soit la résolvante en contrainte définie par
(1.330)
(1.3 35 . a)
ou
(1.3 35.b)
-=
103
la solution sxprime en fonction des déplacements généralisés X associés aux
champs de contrainte '.
(1.331) =
On associe à cette équation les.. équations de contrainte qui traduisent la projection de
l'opérateur .. dans l'esp ace ' E S .
(1.332) ç cs-,
On introduit les forces généralisées
(1.333) (rou encore
(I.334.a) - - C.
et
(I.334.b) cL
La relation (1.331) jointe aux équations (1.332) donne le système homogène
-ï
Vt E: -. &)
.2.C4) =.
- ,-. -..--UI
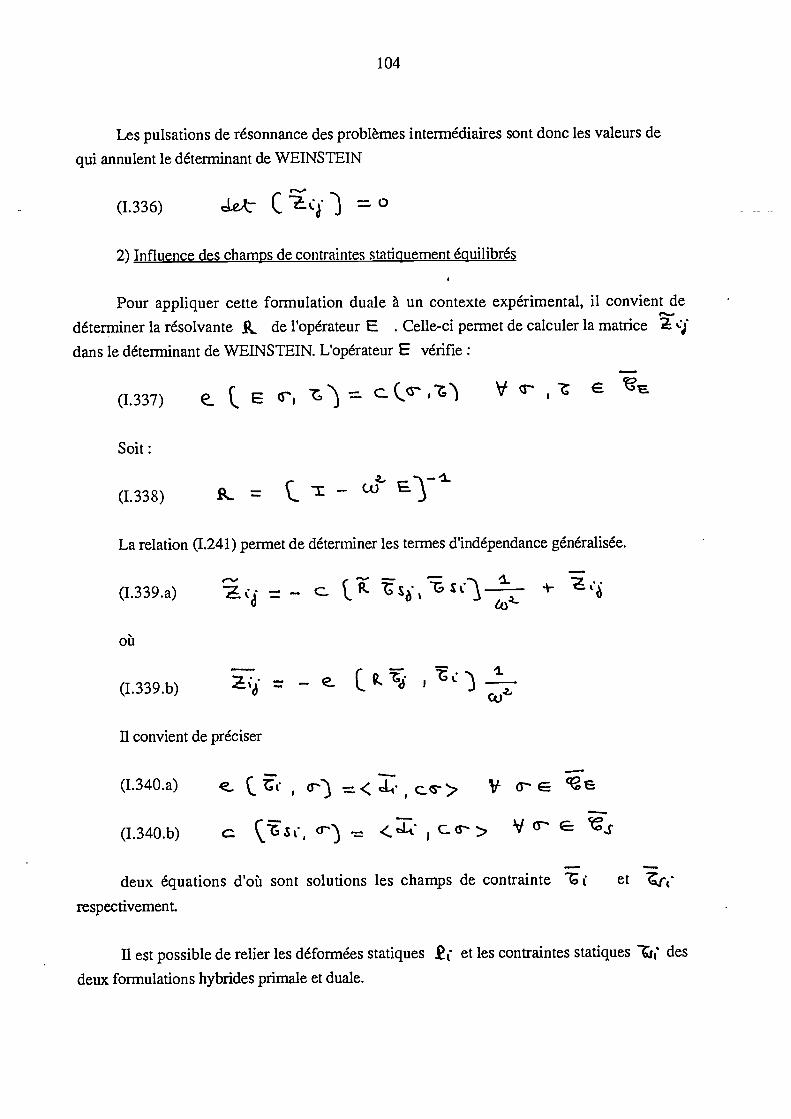
Les pulsations de résonnance des problèmes intermédiaires sont donc les valeurs de
qui annulent le déterminant de WEINSTEIN
(1.336) Lek C Cj =
2) Influence des champs de contraintes statiquement équilibrés
Pour appliquer cette formulation duale à un contexte expérimental, il convient de
déterminer la résolvante L de l'opérateur E . Celle-ci permet de calculer la matrice
dans le déterminant de WEINSTEIN. L'opérateur E vérifie:
(1.337) E ', . C (r , V
Soit:
(1.338) R- = - cJ
La relation (1.241) permet de déterminer les termes d'indépendance généralisée.
(I.339.a)
où
(I.339.b)
V-'-
104
= e.
Q t'
II est possible de relier les déformées statiques 2 et les contraintes statiques des
deux formulations hybrides primale et duale.
II convient de préciser
(I.340.a) C 't- cr) <. g V
(I.340.b) c yt .= <.;'; , - 6> V E;
deux équations d'où sont solutions les champs de contrainte C et g-
respectivement
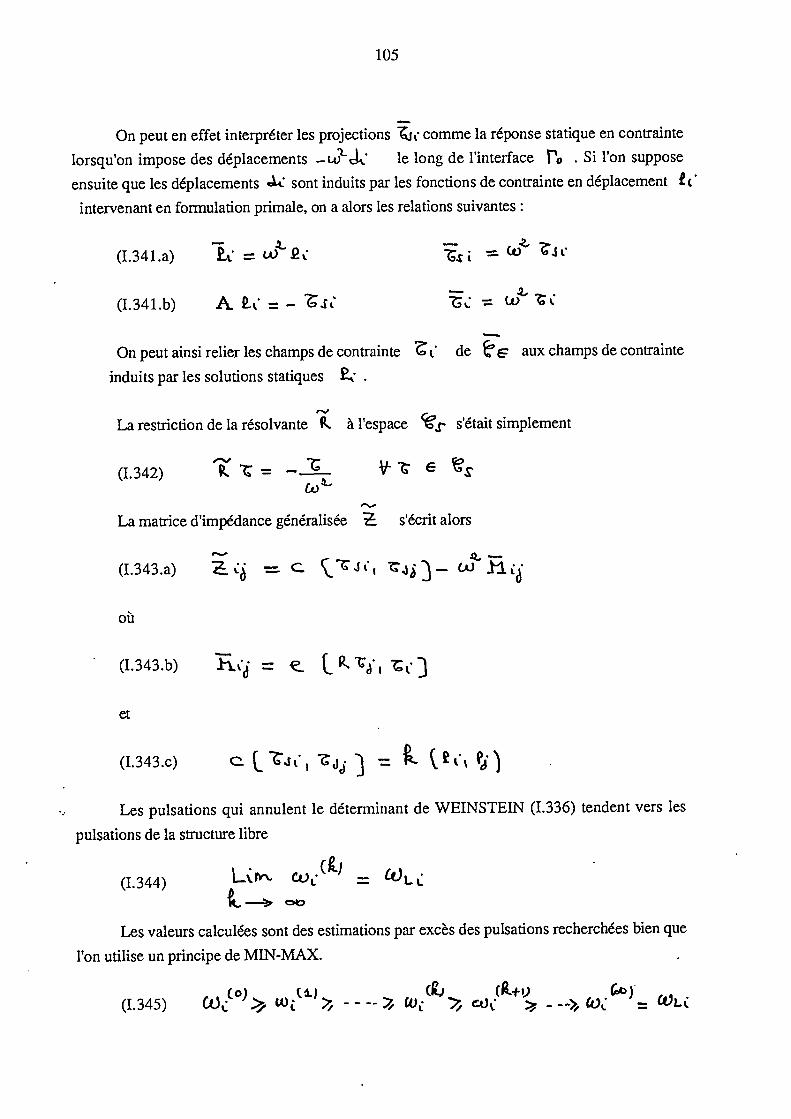
On peut en effet interpréter les projections comme la réponse statique en contrainte
lorsqu'on impose des déplacements _u?J le long de l'interface Po . Si l'on suppose
ensuite que les déplacements sont induits par les fonctions de contrainte en déplacement I C
intervenant en formulation primale, on a alors les relations suivantes:
(I.341.a) (A) Q
(1.342)
105
La matrice d'impédance généralisée s'écrit alors
(I.343.a) C
où
(I.343.b) = e.
et
(I.343.c) &
Les pulsations qui annulent le déterminant de WEINSTEIN (1.336) tendent vers les
pulsations de la structure libre
(1.344) 'h"- '-'C =
Les valeurs calculées sont des estimations par excès des pulsations recherchées bien que
l'on utilise un principe de MIN-MAX.
(J(1.345) wt(0 wL - - -- ', Cv - -->, co WLC
(I.341.b) A. Q- = - ufr'
On peut ainsi relier les champs de contrainte t de aux champs de contrainte
induits par les solutions statiques 2.
La restriction de la résolvante t. à l'espace '.ç- s'était simplement

effet
3) Troncature de la résolvante
L'équation (I.343.a) induit une étude spécifique du terme de mase généralisée
définie en équation (I.343.b). Il convient donc de déterminer l'expression R. j solution de
l'équation:
(1.346) ( p, =
En suivant une démarche similaire à la formulation primale, on exprime la résolvante
dans la base des modes de contrainte V qui est complète dans l'espace
L'opérateur de baseE est projeté dans l'espace engendré par les '- premiers modes.
106
(I.347.a) E=.T E T. + - E
avec
(I.347.b) u . = T -
et T est l'opérateur de projection sur
* Troncature du type RAYLEIGH-RITZ
On réduit l'opérateur E à sa partie principale
(1.348) R'Ç, c Ç.1, "GEe) .Ee
(u! ._wt)
et on obtient:
. Ç., e)e(ww&)
On peut exprimer la relation (1.348) en fonction des modes primaux XEe et 2) . En
(1.349) . (,l "E) = .C.
or
(1.350) e.= A X
donc
(1.351) C Ct'Ee)= C.
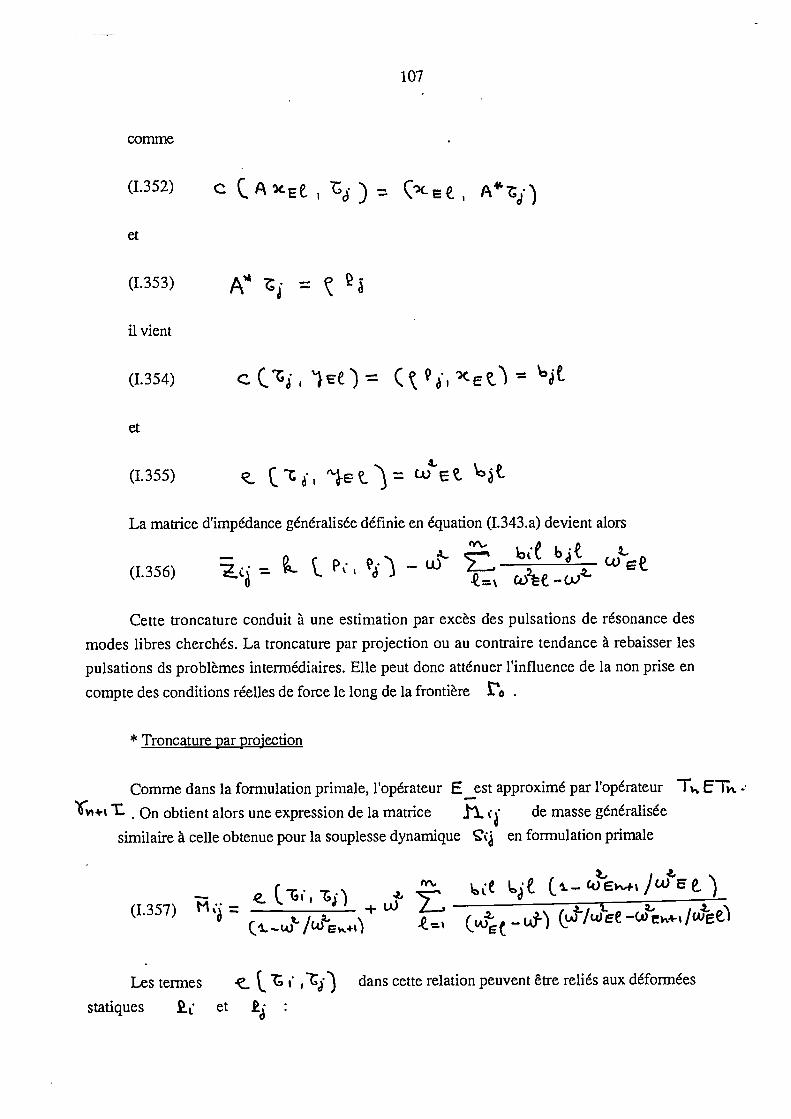
comme
(1.352)
et
(1.353)
il vient
(1.354)
et
(1.355) '- C '1-e t = w
La matrice d'imp&lance généralisée définie en équation (I.343.a) devient alors
(1.356) = W T1 LwEe
cde-w
Cette troncature conduit à une estimation par excès des pulsations de résonance des
modes libres cherchés. La troncature par projection ou au contraire tendance à rebaisser les
pulsations ds problèmes intermédiaires. Elle peut donc atténuer l'influence de la non prise en
compte des conditions réelles de force le long de la frontière 'o
* Troncature par projection
Comme dans la formulation primale, l'opérateur E_est approximé par l'opérateur T ET.1.+I t . On obtient alors une expression de la matrice .h. de masse généralisée
similaire à celle obtenue pour la souplesse dynamique en formulation primale
_C'.'n +' L (t_ci %JWE)(1.357) - (t _Wt/WQEM (t - uF) CWL/wtEe _.ar/wte&
Les termes C?' dans cette relation peuvent être reliés aux déformées
statiques .L et
107
C ( / t) = , A"tf)
=
cÇ1Ee)= (,,(e't
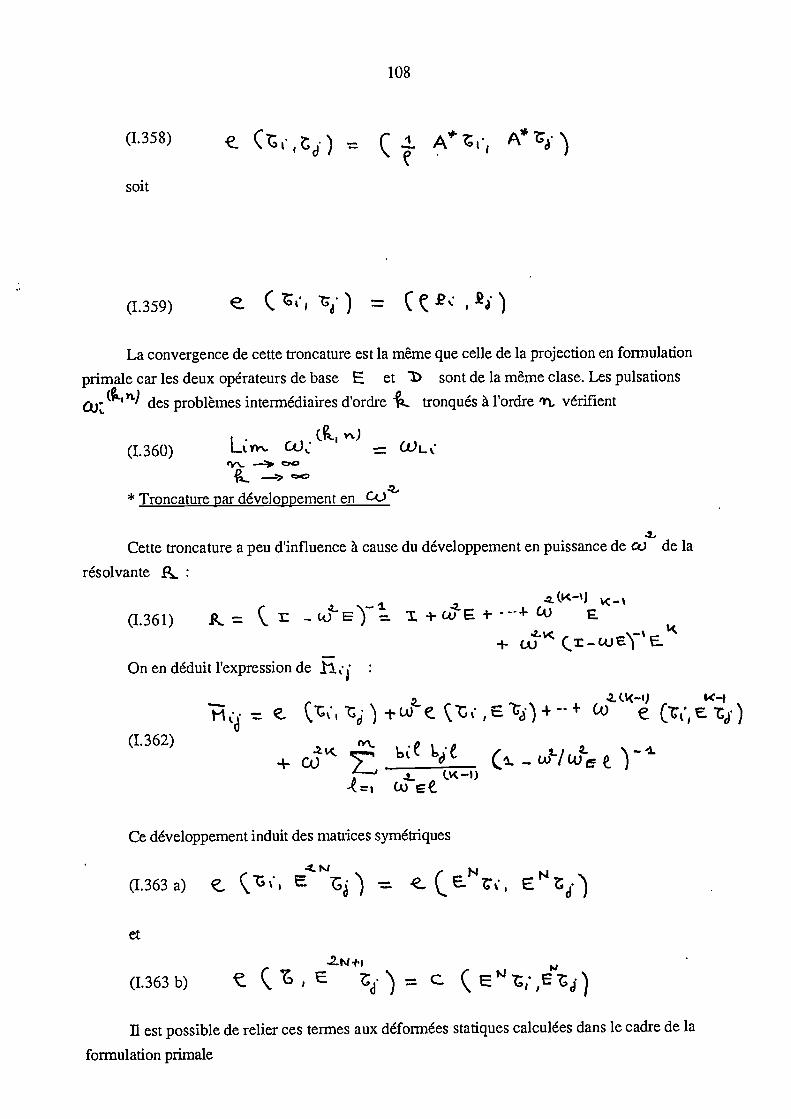
(1.358) e.= ç A't1, A*J
soit
(1.359) e (t1, ) = Ç Sj 'j
La convergence de cette troncature est la même que celle de la projection en formulation
primale car les deux opérateurs de base E et b sont de la même clase. Les pulsations
des problèmes intermédiaires d'ordre .Ç tronqués à l'ordre 'n vérifient
(1.360) CAJ
4_ -
* Troncature par développement en
-L.
Cette troncature a peu d'influence a cause du développement en puissance de co de la
résolvante E1..
..tOE-') ,,<
(1.361) E.
+ c (r-w EOn en déduit l'expression de
- Ç i-(J. ,E Ij'j+ -- +
(1.362)
108
Ce développement induit des matrices symétriques
(L363a) E .=. .t(E'4t, Etì)et
(1.363 b) Ç '(3g E = c:Ç E
fl est possible de relier ces termes aux déformées statiques calculées dans le cadre de la
formulation primale
L
.. ((.-I)u)Ee
.Z. (-i) V-t(.t) e
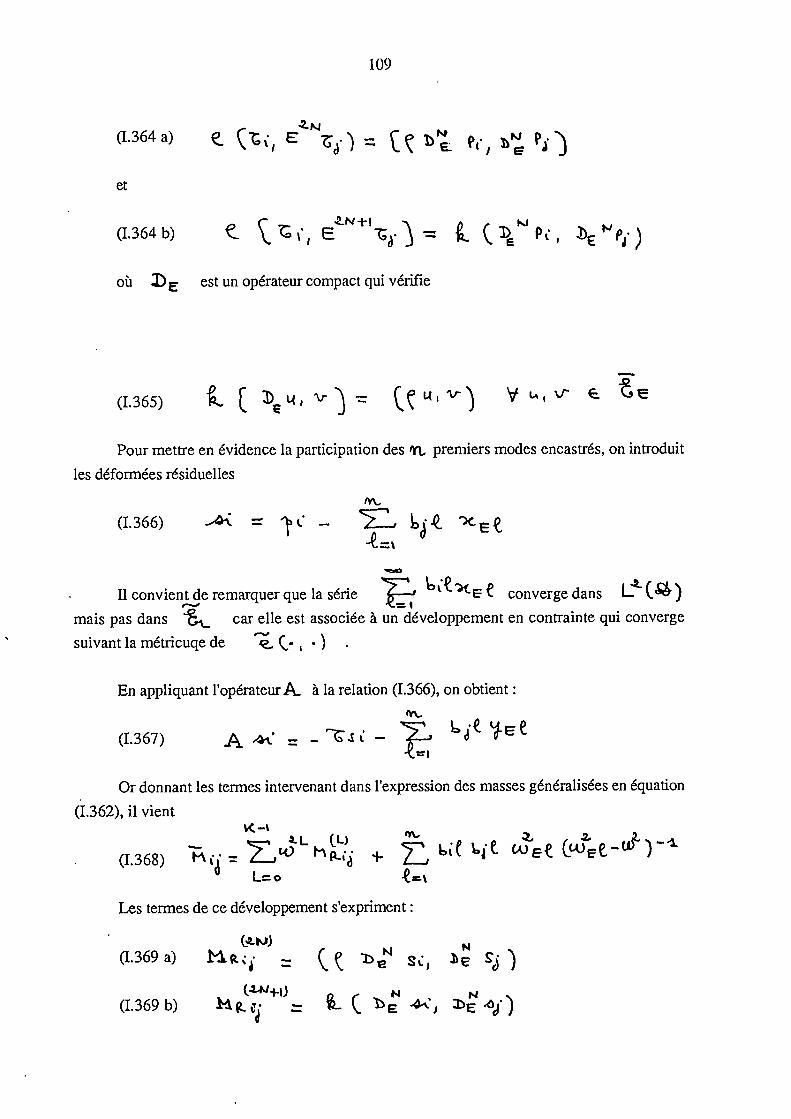
(L364 a)
et
(1.364 b)
. Çt , E = s: b P1., b' P
oE (3"P bP.)où I) est un opérateur compact qui vérifie
(1.365) L E' \rT)
(1.366)
109
V V-
Pour mettre en évidence la participation des 'n.. premiers modes encastrés, on introduit
les déformées résiduelles
II convient de remarquer que la série convergedans L()mais pas dans car elle est associée à un développement en contrainte qui converge
suivant la métricuqe de ' (.
En appliquant l'opérateur & à la relation (1.366), on obtient:
(1.367) A -et' = - - IOr donnant les termes intervenant dans l'expression des masses généralisées en équation
(1.362), ii vient
(1.368)__tt) hp.. 2L IDj CJE (.c.&,2e._tt)(L) -t
LoLes termes de ce développement s'expriment:
N(1.369 a) (ç b1 si:,
(1.369 b) - ( b1 4t b'
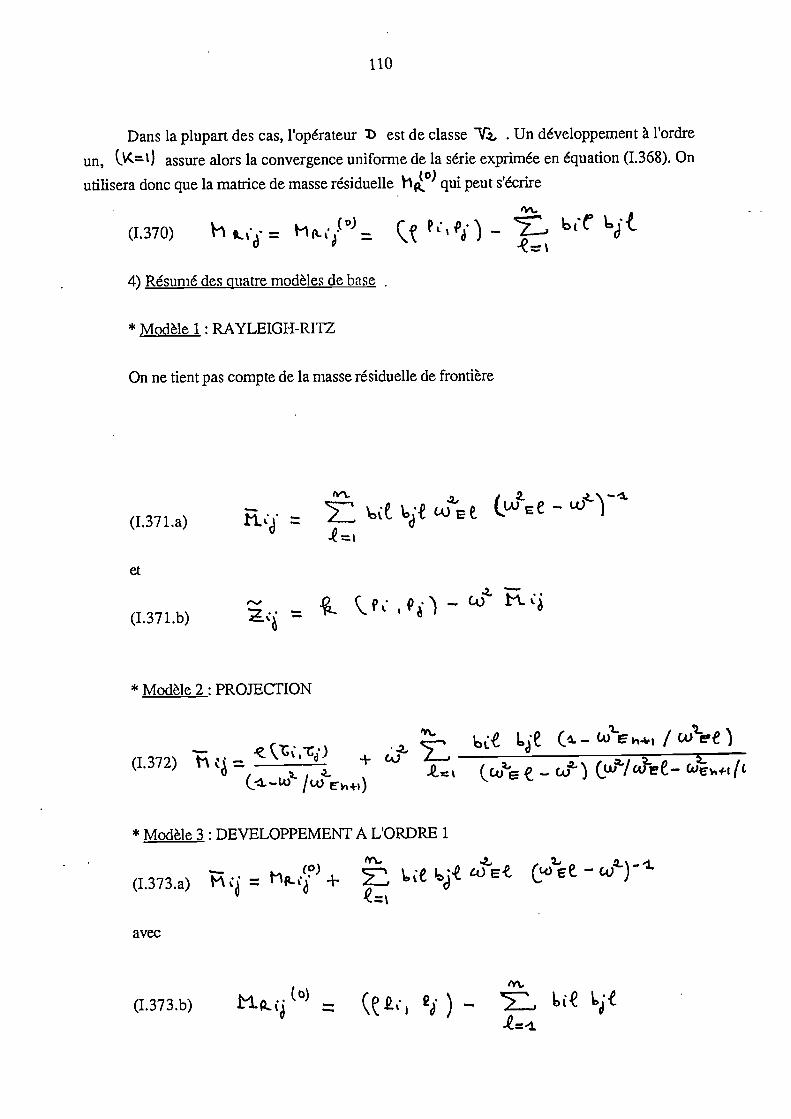
(I.371.a)
et
(1.371 .b)
* Modèle 2: PROJECflON
+c,
(1.372)-(..-Lo lu.)
110
y-'. 0e wEe -
(t_ (4Eh4.% f W')(C.oE : - i- (?/ J- e - Ct,1 f
* Modèle 3: DEVELOPPEMENT A L'ORDRE i
(I.373.a) F + t32'E (O -
avec
(I.373.b) (o) Ç.,', ä ) - y-',, L e
Dans la plupart des cas, l'opérateur D est de classe VV . Un développement à l'ordre
un, assure alors la convergence uniforme de la série exprimée en équation (1.368). On
utilisera donc que la matrice de masse résiduelle h° qui peut s'écrire
(1.370) h = h ' P) - tr i
4) Résumé des quatre modèles de base
* Modèle 1: RAYLEIGH-RITZ
On ne tient pas compte de la masse résiduelle de frontière

111
* Modèle 4: DEVELOPPEMENT A L'ORDRE 2
'Y'-
(I.374.a) " h° h i- ci (c.J_tot)J -Q=I
ety'-
(&) - L 'ste(I.374.b) hp. & (2 )
5) Cas particulier du développement à l'ordre i
Dans cette troncature, la matrice d'impédance généralisée s'écrit:
(1.375) = & 1Q) - c ( ( P) I.e
t
L'équation
(1.376) CL =o
peut se mettre sous la forme standard d'un problème spectral classique:
(I. 37 7 a)
(rL G jr foie (o'\o ,P) J ) b (ÇP1P1)) () =
Une condensation dynamique sur les coordonnées > donne un système homogène
identique à celui de WEINSTEIN
(I.377b) - w_ (Y1) c-4- t*h) - o
où est la matrice spectral constituée des carrés des pulsations de résonance des
modes encastrés.
Ce modèle est interprété par le modèle de RAYLEIGH-Rfl'Z obtenu suivant le schéma
discret:&
(I.377c) tA. 9EC, E E >'
112
C'est la projection de l'opérateur .D dans l'espace G au sens de i- (')
On obtient ainsi une estimation par excès des fréquences de résonnances de la structure
libre. Elles sont meilleures que celles obtenues par la troncature de RAYLEIGH-RITZ mais le
modèle est difficilement accessible par expérience.
IV. 4 APPLICATION EXPERIMENTALE
1) Introduction des modes de branche
* Les difficultés expérimentales
Dans un contexte numérique basé sur les Eléments Finis ou les Différences Finies, il est
possible d'approximer les déformées statiques 2 associées aux changements de frontière et
ls modes normaux de la structure libre ou encastrée. Mais sur le plan expérimental, on est
confronté à trois types de difficultés pour déterminer les déformées statiques 2d et les termes
& c' de la matrice de raideur statique:
- d'une part les termes résiduels en formulation primale obtenues par lissage de courbe
d'impédance sont entachés d'erreurs
- d'autre part il est nécessaire de mesurer les forces d'encastrement en formulation
hybride duale pour accéder à la matrice de raideur statique.
- enfm dans le cas de raccordement le long des frontières continues, il est indispensable
de mesurer un grand nombre de déplacements de frontière, ce qui allourdit énormément la
procédure expérimentale, surtout dans le cas des rotations.
L'introduction des déformées statiques par l'intermédiaire des modes de branche permet
de lever ces difficultés.
* Les modes de branche
Les modes de branche sont les modes normaux de la nouvelle structure obtenue en
chargeant la structure initiale le long de sa frontière de raccordement 1.
Ce chargement d'interface s'obtient en fixant des inerties ou des organes élastiques
connus le long de la frontière tO , ou bien en couplant la structure initiale avec une structure
quelconque.
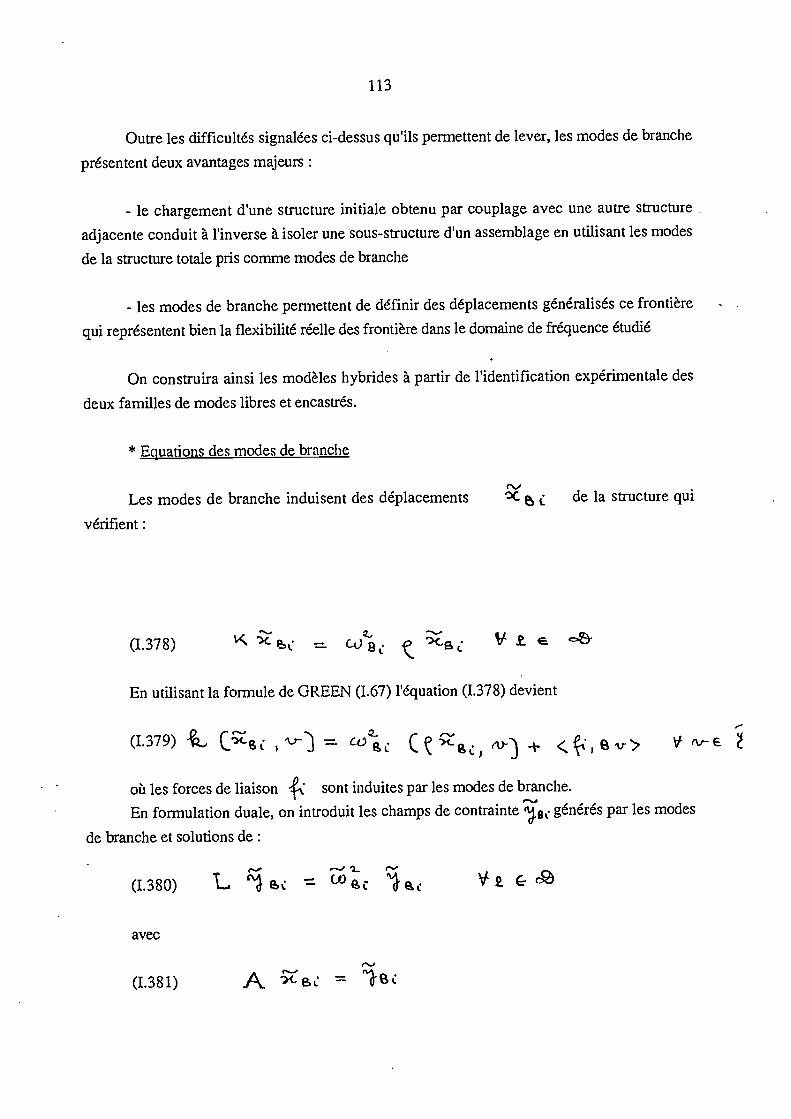
Outre les difficultés signalées ci-dessus qu'ils permettent de lever, les modes de branche
présentent deux avantages majeurs:
- le chargement d'une structure initiale obtenu par couplage avec une autre structure
adjacente conduit à l'inverse à isoler une sous-structure d'un assemblage en utilisant les modes
de la structure totale pris comme modes de branche
- les modes de branche pennettent de définir des déplacements généralisés ce frontière
qui représentent bien la flexibilité réelle des frontière dans le domaine de fréquence étudié
On construira ainsi les modèles hybrides à partir de l'identification expérimentale des
deux familles de modes libres et encastrés.
* Equations des modes de branche
Les modes de branche induisent des déplacements , de la structure qui
vérifient:
113
(1.378)
En utilisant la formule de GREEN (1.67) l'équation (1.378) devient
(1.379) L. Cß
où les forces de liaison sont induites par les modes de branche.
En formulation duale, on introduit les champs de contrainte générés par les modes
de branche et solutions de:
(1.380) L "
avec
(1.381) .A v-Bi =
(ß,»+ <Çi,r>
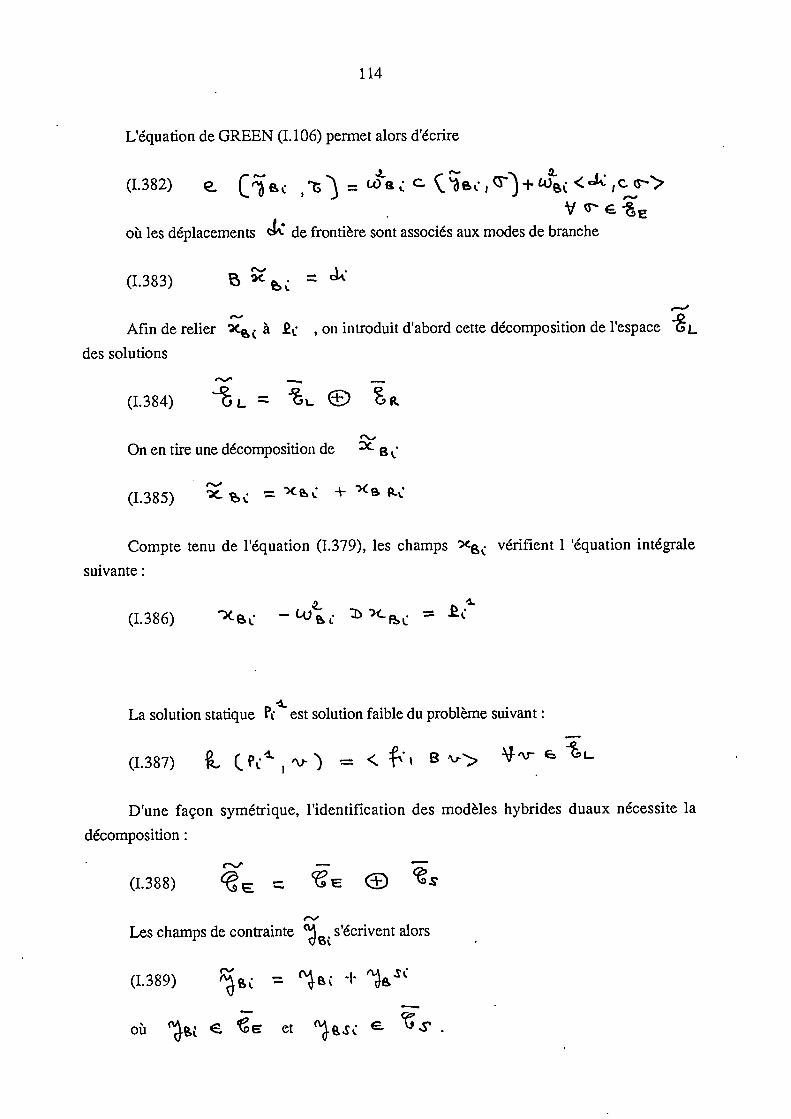
Compte tenu de l'équation (1.379), les champs vérifient i 'équation intégrale
suivante:
(1.386) Xß -4)t b)LßC =
La solution statique est solution faible du problème suivant:
(1.387) L C. 'C' " = B>D'une façon symétrique, l'identification des modèles hybrides duaux nécessite la
décomposition:
(1.388)
114
L'équation de GREEN (1.106) permet alors d'écrire
(1.382) Q C
où les déplacements de frontière sont associés aux modes de branche
(1.383) e. =
Afin de relier 'X à 2 , on introduit d'abord cette décomposition de l'espace
des solutions
(1.384) IL = L
On en tire une décomposition de
Les champs de contrainte s'écrivent alors
(1.389) .= -I- 4ß.0
où E et E- S'.
(1.385) X +sp
Compte tenu de la relation (1.386) les champs de contrainte sont solutions de
l'équation suivante:
(1.390) - CA.)
115
où les champs de contraintes statiques sont définis par la relation
(1.391) cr ( L) c>Les champs sont aussi solutions du système d'équations suivant:
(I.392.a) A' t.(I.392.b) = O
(I.392.c)
La déformée statique est liée au déplacement de frontière ¿ . Elle est obtenue
par une application de distribution de force le long de l'interface to
Il convient de ne pas confondre les deux déformées statiques 2. et . La
première est liée au déplacement généralisé défini en équation (1.383), tandis que la seconde est
associée aux distributions de forces qui vérifient:
(1.393) Q
On distingue trois types de chargement: le chargement en inertie pure réalisé par des
masses additionnelles, le chargement en raideur pure fait de ressorts le long de la frontière
et enfin le chargement quelconque. Ce dernier cas consiste en une liaison entre la structure
connue et une structure adjacente quelconque qui génère les modes de branche.
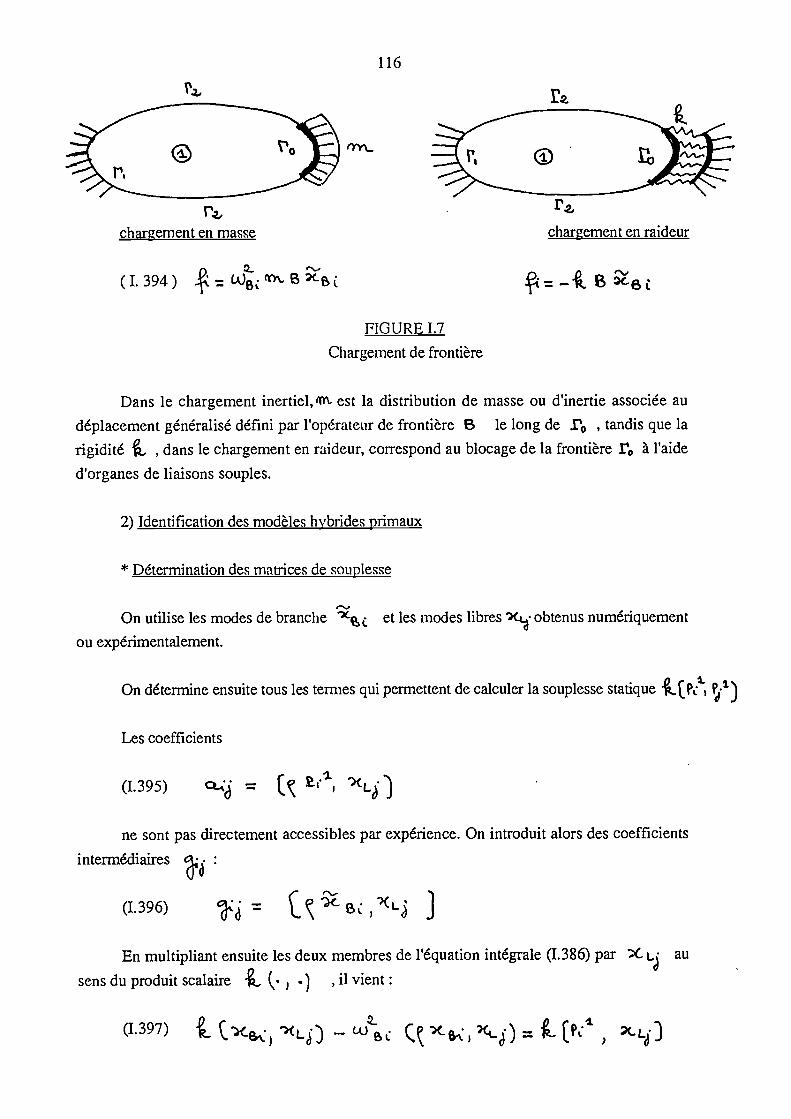
chargement en masse
(1.394)
116
FIGURE 1.7
Chargement de frontière
Dans le chargement inertiel, 'fl\- est la distribution de masse ou d'inertie associée au
déplacement généralisé défini par l'opérateur de frontière B le long de r0 , tandis que la
rigidité L , dans le chargement en raideur, correspond au blocage de la frontière r0 à l'aide
d'organes de liaisons souples.
2) Identification des modèles hybrides primaux
* Détermination des matrices de souplesse
On utilise les modes de branche et les modes libres '(t.. obtenus numériquement
ou expérimentalement.
On détermine ensuite tous les termes qui permettent de calculer la souplesse statique &(pLt; j.t)
Les coefficients
(1.395) Q_4 = c 11
ne sont pas directement accessibles par expérience. On introduit alors des coefficients
intermédiaires
(1.396)- B.
En multipliant ensuite les deux membres de l'équation intégrale (1.386) par )C. .. au
sens du produit scalaire Ç. , .) , il vient:
(1.397) t c, >(Lç) - ()<-s)&e)= &1,
r2.
r.2,
chargement en raideur
Comme et .2 sont éléments de l'espace aL l'équation variationnelle
suivante
(1.398) 'V.
permet d'écrire
(1.3 99.a)
(I.399.b)
L'équation (1.397) prend cette forme simplifiée
(1.400) C)i. - . (AS2L1
soit
t.
Au cas où la matrice de masse t'i., de la structure est connue, on obtient directement
117
WLI
'XL = CO&L3S.,
1 Ct. I<L) = CJL c
(1.404) Cc-) ".r = < t) B ''> 43
(1.402) = )QJ )ÇVß (tt) )(L
où et ')( sont respectivement les modes de branche et libre mesurés
expérimentalement ou connus numériquement.
Si la structure possède des modes de corps rigides, il est nécessaire de déterminer les
termes Pp, Pp.) intervenant dans le déterminant de WEINSTEIN.
On introduit alors des fonctions "Y de l'espace dans la formule de GREEN
(1.379), soit:
(1.403) OC ( B9 r) , B jrOr on sait que
Donc apparait proportionnel à
(1.405) - (A) % e,
On en d&luit le résultat
(1.406) Ç = CA? CA.ì -sR.(
Grâce à la connaissance expérimentale de la matrice (Ît) , des amplitudes % et
respectivement des modes de branche et libres, les deux matrices intervenant dans l'équation
(1.406) sont parfaitement déterminées.
Les modèles 2, 3 et 4 utilisent les matrices de souplesse qui contiennent des souplesses
statiques S définies par
(1.407)(t)Sá =
L'équation (1.386) permet de relier cette matrice aux modes de branche
(1.408)
La série suivante
(1.409)
(i)= 1_ Çe - L ß+Lß) (xBXsfl
converge d'après le théorème de HILBERT-SCHMIDT si 3 appartient à Vj
Le produit (f Xe, t est obtenu aisément.
-I-. X ,(1.410) -ßt xBs)
118
& ç
2..
-t. We) t-C)ßç BC,x8
Xe,
Le produit élastique & ('ß 'ce) pouvait être déterminé d'une façon
similaire si l'on disposait expérimentalement d'une matrice de rigidité.
Mais dans le cas des chargements simples présentés en FIGURE 1.7, l'orthogonalité des
modes permet de calculer précisément le produit & (tç1, )Csf) . On obtient les
expressions suivantes respectivement pour un chargement en masse, en raideur et un
chargement quelconque:
(1.413)
119
& Çt,xS)= (ALA -e
* Tests de validation
3) Identification des modèles hybrides duaux
* Détermination des matrices d'impédance
On utilise les modes encastrés et les modes de branche mesurés en nombre fini. La
procédure d'identification est la même qu'en formulation primale.
Mais il convient de remarquer que le produit élastique C (t.S C, &') présent dans lai
matrice d'impédance en équation (I.343.a), s'exprime aussi en fonction des déformées statiques
soit:
(1.412) c ( Pt')
Afin de relier les termes aux modes de branche, Cßt de la formulation primale,
utilise des fonctions de l'espace dans la formule de GREEN (1.382):
L'équation variationnelle
(1.414) C) < -' , C.. > L
permet d'obtenir
(1.415) -
(I.410.a) Ç zc - BO.)
efl,.
(1.41 1.b) & (ce,c1 I3S)
W RC (.&)s - )CßC Çt

Cette relation et la défmiúon (1.412) donnent en définitive
(1.416) = - ßt'
On doit aussi remarquer que les termes intervenant dans cette formulation duale sont
approchés par les modes encastrés. Or la série suivante
(1.417) = >,où
(1.418) =
ne converge pas dans L , mais dans . On est obligé donc d'utiliser des
chargements simples définis en équation (1.41 1.a) et (1.41 1.b) pour calculer Kc.
Afin de relier les termes (t'j et , on multiplie l'éqúation intégrale (1.390) par le
champ de contrainte au sens du produit
(1.419) A ce
En utilisant les relations suivantes
(1.420 a)
(1.420 b)
et la définition du produit scalaire
120
il vient
(1.422) u: c -
(1.421 a) Q Ç ßC = Ctì2B CJ8Ç
(1.421 b) e- Ç- EScd \L'j
Comme est un vecteur propre de l'opérateur E. . L'introduction des équations
(1.421) dans l'égalité (1.419) donne:
121
La similitude entre les expressions (1.40 1) et (1.422) induit la relation suivante entre les
modes de branche et les déformées statiques
(1.423) - 2..
Comme X est un vecteur propre de l'opérateur , il vient:
(1.424) c - = c.o E.
D'après le Théorème de HILBERT-SCHMIDT, la série de l'égalité (1.424) converge
absolument si l'opérateur 1E est de classe Vi,.
Dans le cas des modèles 2, 3 et 4, ii est nécessaire d'identifier les matrices de masses
généralisées où interviennent les termes de masse résiduelle
(1.425) ii. Ç. e. c ;
En utilisant l'expression de 'r dans l'équation (1.390), on obtient
(1.428)
[B:1 /)-- - (wß+wñc (8c,ßç'(1.426)
(0t
+ c Ç-Bc, E
Il convient d'expliciter les trois produits scalaires du membre de droite de la relation
(1.426).
Le premier terme s'écrit simplement
e. ßC cß(\(1.427) -
où le terme est déterminé par les mesures expérimentales.
Pour calculer les deux autres termes de la relation (1.426), on remarque d'abord que
2ÇEJcvtJ
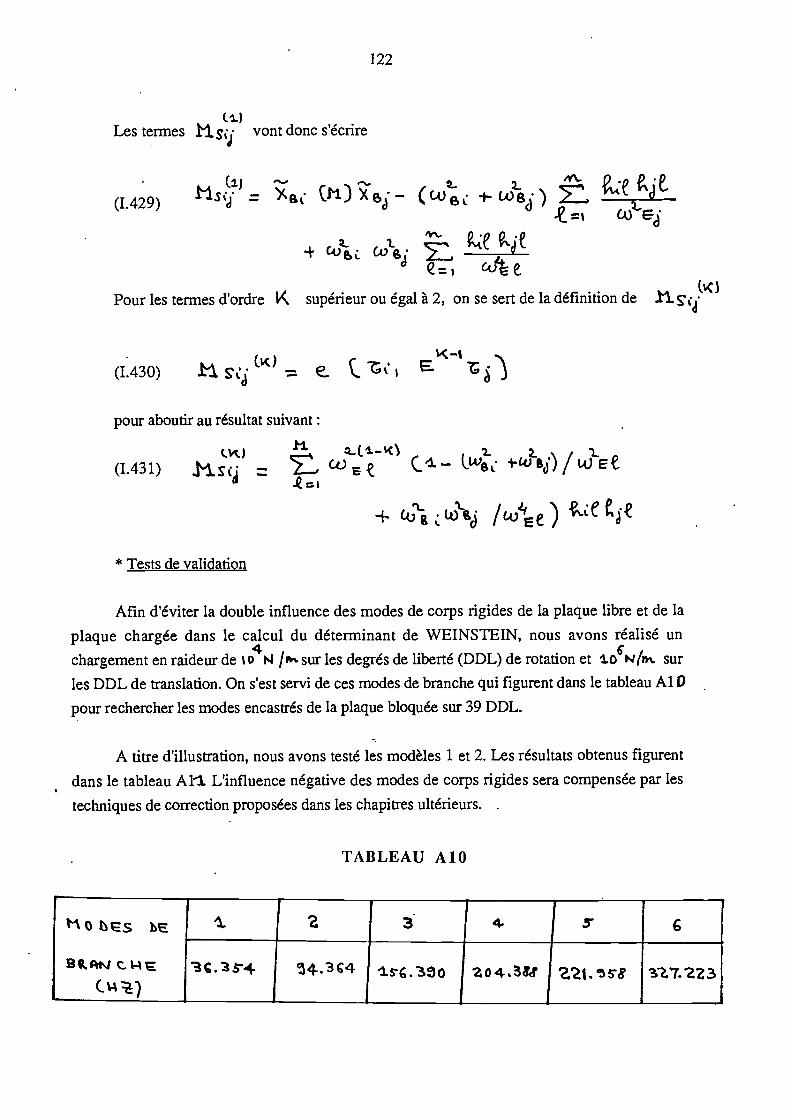
(t)Les termes vont donc s'écrire
(i.; e.-
(1.429) = (ì-i) 'X (CA'BL -t- w') L-e= (A?E<
q1Pour les termes d'ordre k< supérieur ou égal à 2, on se sert de la définition de
(1.430) s' C
pour aboutir au résultat suivant:
j-t(1.43 1) = Ct.) E
J.v icJ) / u3{.
+ OLIc$ /.1Ee)
* Tests de validation
Afin d'éviter la double influence des modes de corps rigides de la plaque libre et de la
plaque chargée dans le calcul du déterminant de WEINSTEIN, nous avons réalisé unchargement en raideur de D4N /rr. sur les degrés de liberté (DDL) de rotation et towf sur
les DDL de translation. On s'est servi de ces modes de branche qui figurent dans le tableau Al O
pour rechercher les modes encastrés de la plaque bloquée sur 39 DDL.
A titre d'illustration, nous avons testé les modèles i et 2. Les résultats obtenus figurent
dans le tableau All L'influence négative des modes de corps rigides sera compensée par les
techniques de correction proposées dans les chapitres ultérieurs.
TABLEAU AlO
122
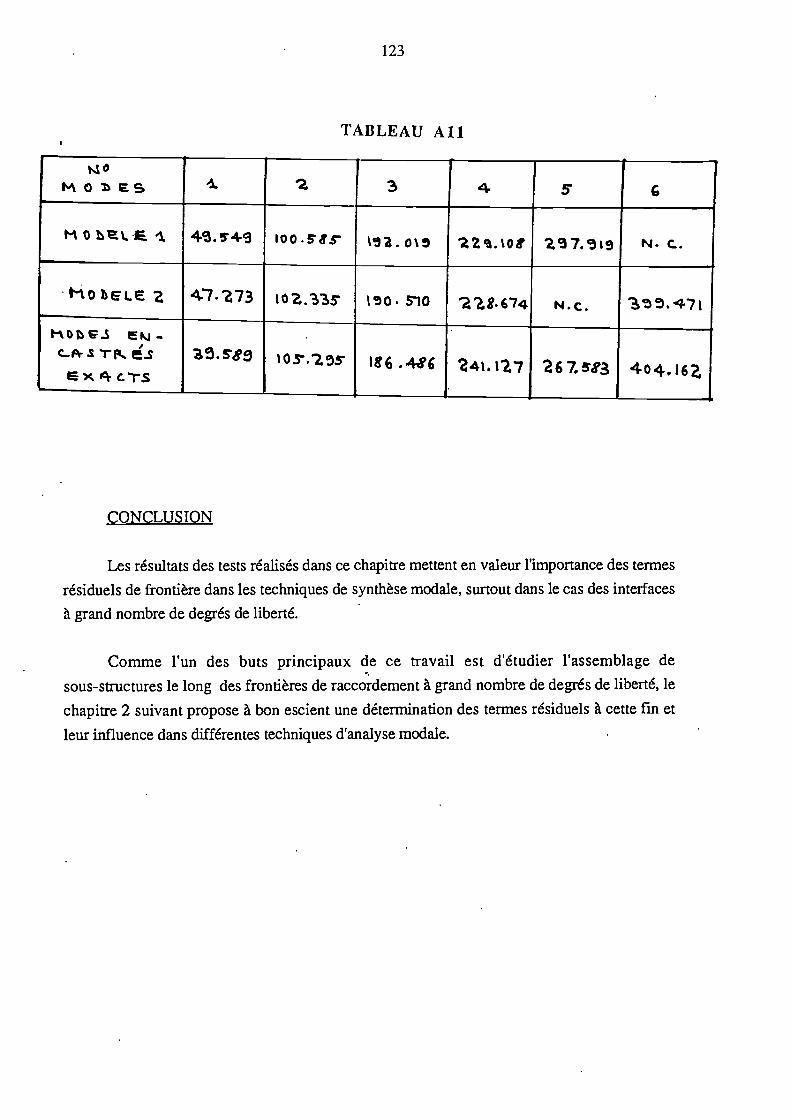
123
TABLEAU All
CONCLUSION
Les résultats des tests réalisés dans ce chapitre mettent en valeur l'importance des termes
résiduels de frontière dans les techniques de synthèse modale, surtout dans le cas des interfaces
à grand nombre de degrés de liberté.
Comme l'un des buts principaux de ce travail est d'étudier l'assemblage desous-structures le long des frontières de raccordement à grand nombre de degrés de liberté, le
chapitre 2 suivant propose à bon escient une détermination des termes résiduels à cette fin et
leur influence dans différentes techniques d'analyse modale.
MObS - '2. 3 4 G
-. 443 ioo.5e. 2Z'.tot 27.'I9 N. C..
t'tQbELE 2 47Z73 LO2.33S t'. 5-IO g.ç74 N.c.
tDEi J,j..
-
.sg3 OsZst
1g6.486 24ht27 '67.83
CHAPITRE 2CARACTERISTIQUES RESIDUELLES
EN SYNTHESE. MODALE
125
ChAPITRE 2
CARACTERISTIQUES RESIDUELLES
EN SYNThESE MODALE
INTRODUCTION
IMPORTANCE DES CARACTERISTIOUES RESIDUELLES
1.1 EXPRESSION DE LA FLEXIBILITE RESIDUELLE
1.2 EXTENSION DE LA CONDENSATION DYNAMIQUE DE GUYAN
1.3 REPONSE TEMPORELLE
1.4 EXPRESSION DE LA MASSE RESIDUELLE
CARACTERISTIOUES RESIDUELLES EN ANALYSE DE SENSIBILITE
11.1 PROCEDURE GENERALE
11.2 PRESENTATION DE LA METHODE
CONCLUSION

INTRODUCTION
Les caractéristiques résiduelles en Dynamique des structures sont de deux types : la
flexibilité et la masse résiduelle utilisées respectivement en formulation primale et enformulation duale développées dans le chapitre précédent. Leur introduction permet de
compenser la pénalisation induite par la troncature modale. On peut ainsi améliorer la réponse
dynamique d'une structure obtenue par synthèse.
Dans le contexte expérimental, la détermination des termes résiduels est difficile et
imprécise. L'on se sert en double synthèse modale des modes de branche pour déterminer les
déformées statiques afin de calculer les caractéristiques résiduelles. En formulation discrète, un
calcul matriciel est possible et permet de connaître numériquement ces termes. C'est l'objet de la
première partie de ce chapitre.
Nous envisageons ensuite l'influence de la prise en compte des termes résiduels en
analyse de sensibilité. Cette étude est faite dans la deuxième partie.
I. IMPORTANCE DES CARACTERISTIOUES RESIDUELLES
En accord avec les procédures proposées par LEUNG, (R i) à (P.35), la souplesse
dynamique d'une structure élastique à une pulsation & quelconque s'écrit à l'ordre WI
SOu) = So + -4 -.- -W S+-- 4 SN-I
+ , [-n.. -JYi
où so s Çç<i'(r%) "(kr), estlamatricemodale, _(L2
la matrice spectrale, ( et (ti) les matrices respectives de raideur et de masse obtenues par
Eléments Finis.
La relation (11.1) peut encore s'écrire:
.,j.. 1
)(11.2) 2.14 r ')+W CÇcL(JL(A))) (
A partir de l'équation de l'équilibre dynamique écrite en formulation duale, il est possible
de disposer d'un développement similaire.
Les développements limités que nous introduisons supposent l'existence de la matrice de.4. ..
flexibilité statique (vZ) . En la presence des modes de corps rigides, (t4) n est pas
définie et l'on introduit une matrice de pseudo-flexibilité par une procédure présentée en
ANNEXE 2
126
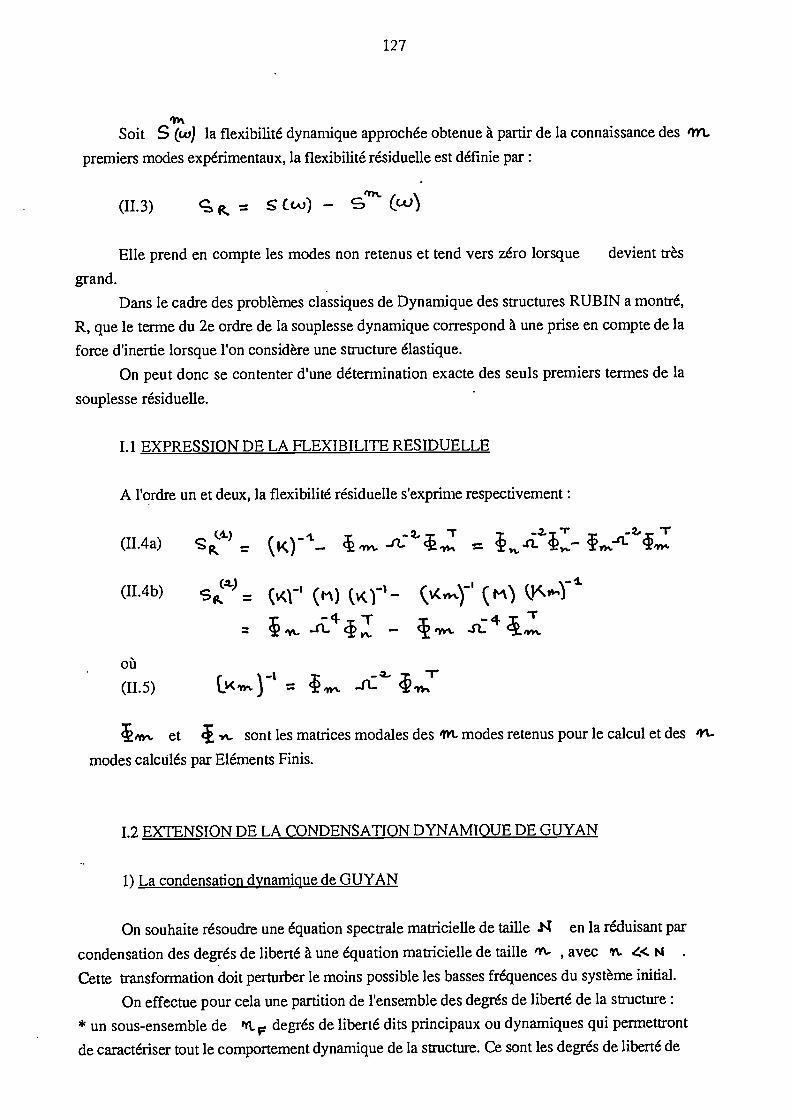
où
(11.5)
m.. et t. sont les matrices modales des 'm modes retenus pour le calcul et des 'Vt.
modes calculés par Eléments Finis.
1.2 EXTENSION DE LA CONDENSATION DYNAMIOUE DE GUYAN
1) La condensation dynamique de GUYAN
On souhaite résoudre une équation spectrale matricielle de taille Jt en la réduisant par
condensation des degrés de liberté à une équation matricielle de taille 'n- , avec n. 4< N
Cette transformation doit perturber le moins possible les basses fréquences du système initial.
On effectue pour cela une partition de l'ensemble des degrés de liberté de la structure:* un sous-ensemble de M. degrés de liberté dits principaux ou dynamiques qui permettront
de caractériser tout le comportement dynamique de la structure. Ce sont les degrés de liberté de
127
Soit S (w) la flexibilité dynamique approchée obtenue à partir de la connaissance des 'tn.
premiers modes expérimentaux, la flexibilité résiduelle est définie par:
(11.3) = S (t...,) - s (w')
Elle prend en compte les modes non retenus et tend vers zéro lorsque devient très
grand.
Dans le cadre des problèmes classiques de Dynamique des structures RUBIN a montré,
R, que le terme du 2e ordre de la souplesse dynamique correspond à une prise en compte de la
force d'inertie lorsque l'on considère une structure élastique.
On peut donc se contenter d'une détermination exacte des seuls premiers termes de la
souplesse résiduelle.
1.1 EXPRESSION DE LA FLEXIBILITE RESIDUELLE
A l'ordre un et deux, la flexibilité résiduelle s'exprime respectivement:
(II.4a) = (Kt 2TL-e- L- -(L
-r
(II.4b)= (' (ti) (' (*)' ÇM (%3t
-- -r-n-Th
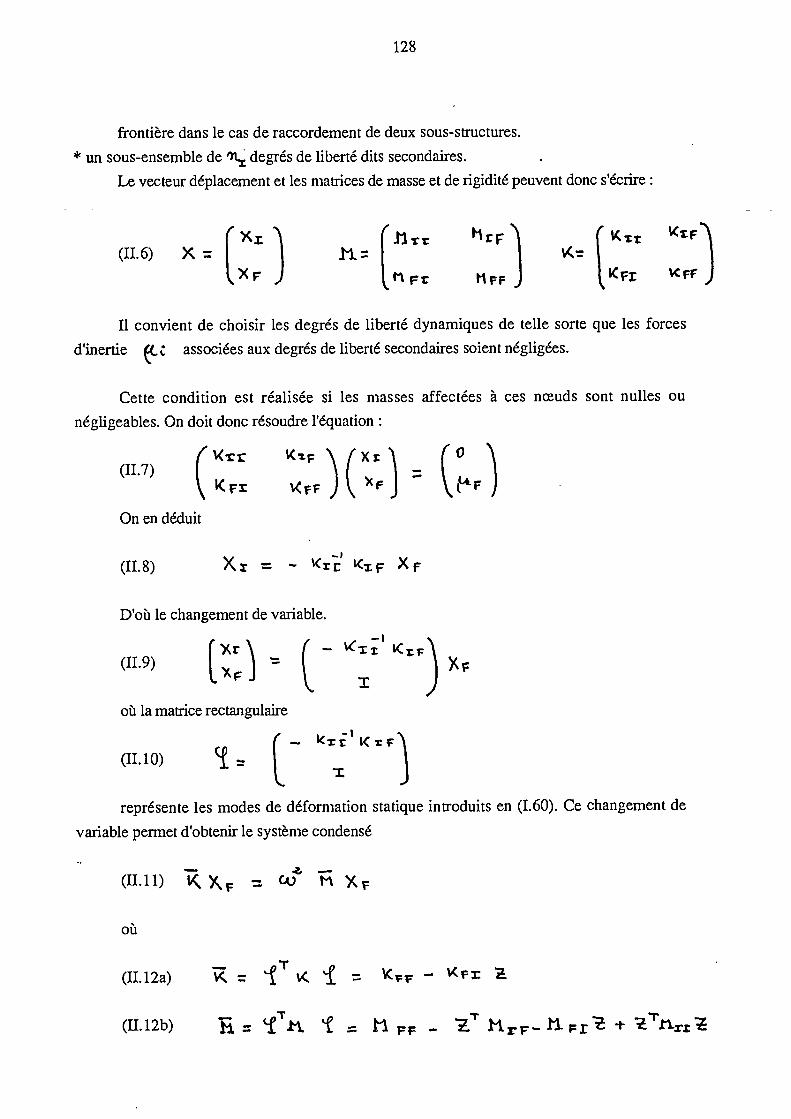
(11.9)1%r
L I
128
frontière dans le cas de raccordement de deux sous-structures.
* un sous-ensemble de ')Ç degrés de liberté dits secondaires.
Le vecteur déplacement et les matrices de masse et de rigidité peuvent donc s'écrire:
(11.6) X Çx 11:flirt 'IrF F
XF tIFF 1tIl convient de choisir les degrés de liberté dynamiques de telle sorte que les forces
d'inertie c associées aux degrés de liberté secondaires soient négligées.
Cette condition est réalisée si les masses affectées à ces noeuds sont nulles ounégligeables. On doit donc résoudre l'équation:
F \ 1x'(11.7)
<F )On en déduit
(11.8) - %( IF X
D'où le changement de variable.
(o
Xc
T
hFÇ
<f r F F L
où la matrice rectangulaire
- kt Krc(11.10)
représente les modes de déformation statique introduits en (1.60). Ce changement de
variable permet d'obtenir le système condensé
(11.11) ì: X%Ç = (&)-
avec
(11.1 2c)
La précision de cette méthode de GUYAN est néanmoins liée au choix des degrés de
liberté dynamiques qui doit se faire avec précaution faute de perdre les basses fréquences.
2) La méthode de LEUNG
Afin d'améliorer la procédure de GUYAN, LEUNG a récemment obtenu à partir d'une
formulation continue et discrète, de type RAYLEIGH-Ri1'Z (R 31 )et (R 33) , basée sur les
modes encastrés et les modes statiques ( ANNEXE 8 ) une matrice de raideur dynamique
étendue aux termes du premier ordre.
129
_°-i; GJ\.GT
(_lJ2_ \.2 .2. -i.(cu 3) (n-E w i)
où £L est la matrice spectrale, carre des pulsations et
(II.14b) G =. hç .SLE
étant la matrice modale des premiers modes encastrés.
Le Théorème de LEUNG permet de déterminer la matrice de masse dynamique pour un
système linéaire, à partir de la matrice de rigidité dynamique.,(11.15) (w) L (cu)
On obtient alors
(11.16) M (c.u) + (..n_ cJr) '
3) Etapes du calcul
On détermine les matrices et en résolvant Féquation spectrale
(11.17) '<r '
avec
(ILl8a) =
(II.18b) cT
On choisit (4, proche de la pulsation cherchée. Si celle-ci est la plus basse, on
prend W0 o
On calcule
(II. 19a)
130
cLj CAjo? G..&cT
(II. 19b) j-w0 Fì+ GGT G fl4 Ç (A) I)On résout l'équation suivante
(11.20) £LÌ1. (ct'Q)'.F
On détermine la pulsation cherchée par le quotient de RAYLEIGH
(11.21) + x /'i-tXF)CA)O+fL
1.3 REPONSE TEMPORELLE
1) Solution générale
La méthode des Eléments Finis donne pour une structure non amortie l'équation
dynamique suivante:
(11.22) a X + À = F

(11.26)
(11.30)
131
où M et K sont respectivement les matrices de masse et de rigidité, > le
déplacement généralisé et F le vecteur force.
Si désigne la matrice modale des 'p1. premiers modes normaux et .cL la matrice
spectrale qui lui est associée, les relations classiques suivantes sont vérifiées:
(11.23) 11. cj .(L %< )=
=
Le changement de variable
(11.24) A °
donne l'équation dynamique:
(11.25) + ..a.2
où
(. ..c) M )(oj + (c 4\&) ÇI-t.XCDJ
+ _c\ j .fr (L (-) r
désigne la force généralisée.
La solution de l'équation (11.25) s'écrit:
r,c(11.27) _ç' J .4 ..çi,. C - ) () ci t + ID o
où st- ), caì ..n et désignent symboliquement des matrices
diagonales respectivement d'éléments diagonaux
(11.28) A (V ( ) (AA CO4 CO C-
et
T T(11.29) A (o) .Q..t ii. X (°)
avec et )(oJ les conditions initiales associées à l'équation (11.22) dont la solution
générale s'écrit:

écrire:
132
Dans les cas réels, l'on tient compte de l'amortissement et au bout d'une certaine durée,
seul subsiste le dernier terme de l'équation (11.30) qui correspond à l'intégrale de convolution
de DUHAMEL. Soit:
() tAu terme de deux intégrations par parties, l'expression (11.31) devient
(11.32)r ) - £CcA1 fl- 1F(o)
-
2) Influence des termes résiduels
Dans le cas où l'excitation ne concerne que certains noeuds seulement, il est naturel
d'introduire la partion (11.6) des degrés de liberté:
(11.33)(r11 tzf \( (rr <tF\ (o
r :vi) )c
Si la matrice modale se partitionne conformément aux degrés de liberté, l'on peut
(11.34)
(11.35)
T>%.ç? -c
F- F
F
-$1F o
Si la force F(t) admet des dérivées d'ordre élevé, la relation (11.34) peut s'écrire après
plusieurs intégrations par parties:
-r- cf .1..JL - F F(t)
+ -n s(+.) (4) A.t
+ F(co3flÁ;) ß;i(D)_ c())
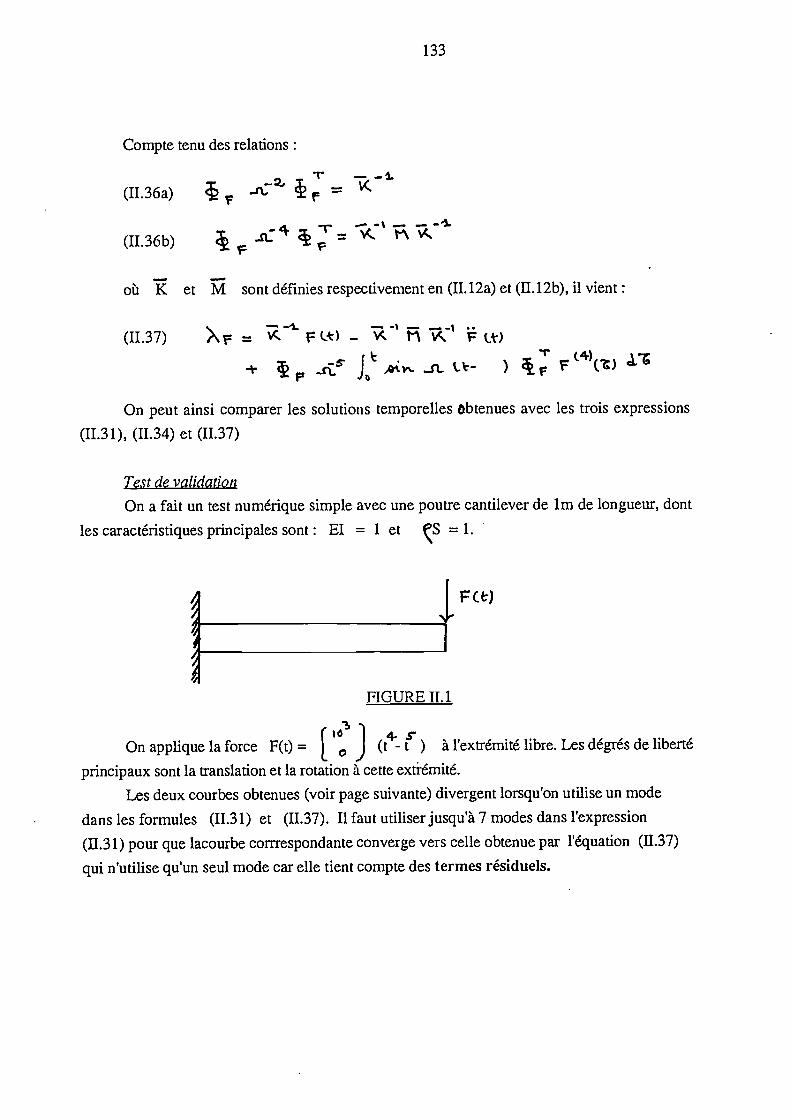
Compte tenu des relations:
T(II.36a)
(II. 36b)
133
où K et M sont définies respectivement en (II. 12a) et (II. 12b), il vient:
(1137) Ç (k) - F W' i W-i- P JD' -fl-. (_k- ) F4C) (1
On peut ainsi comparer les solutions temporelles obtenues avec les trois expressions
(11.31), (11.34) et (11.37)
Test de validationOn a fait un test numérique simple avec une poutre cantilever de 1m de longueur, dont
les caractéristiques principales sont: EI i et = 1.
FIGURE 11.1
rió i 4.5On apphque la force F(t) = J (t - t à l'extrémité libre. Les dégrés de liberté
principaux sont la translation et la rotation à cette extrémité.
Les deux courbes obtenues (voir page suivante) divergent lorsqu'on utilise un mode
dans les formules (11.31) et (11.37). Ii faut utiliser jusqu'à 7 modes dans l'expression
(11.31) pour que lacourbe corrrespondante converge vers celle obtenue par l'équation (11.37)
qui n'utilise qu'un seul mode car elle tient compte des termes résiduels.
F (t)
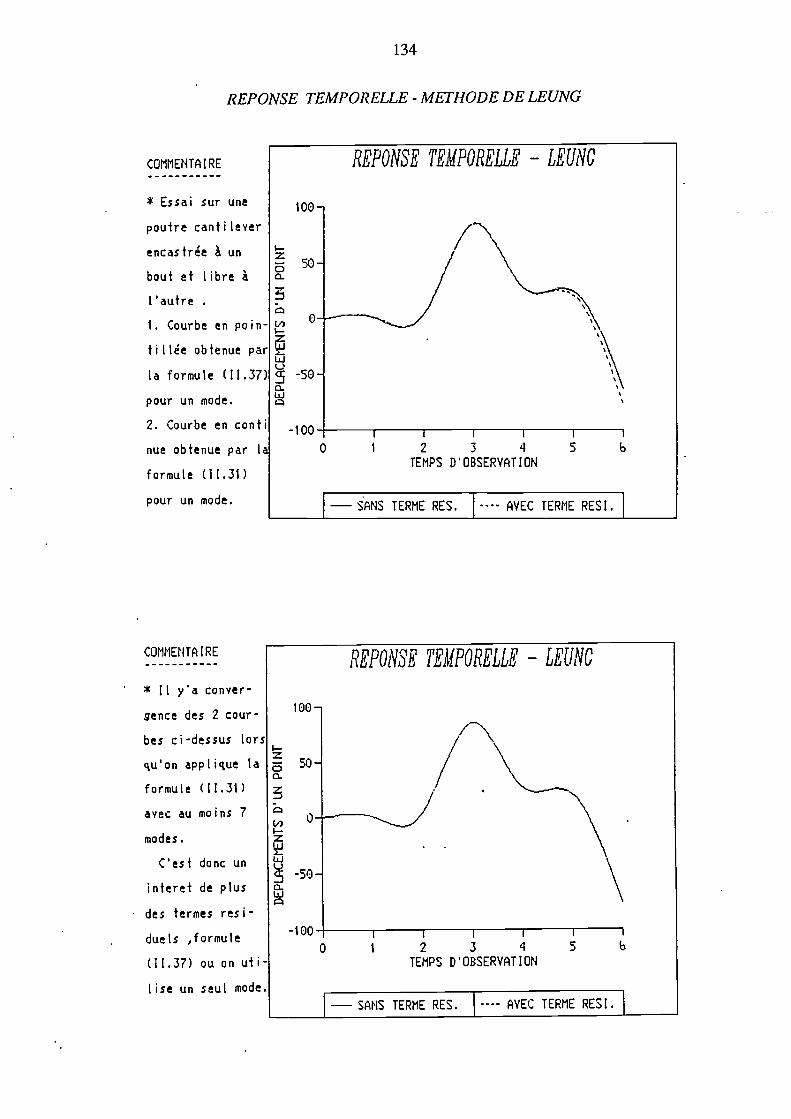
COMMENTAIRE
* Essai sur une
poutre cantilever
encastrée à un
bout et Libre à
L'autre
Courbe en poin-
fil1e obtenue par
la formule (U.37)
pour un mode.
Courbe en conti
nue obtenue par I
formule (11.31)
pour un mode.
COMMENTA L RE
* Il ya
gence des 2 cour-
bes ci-dessus lors
su'on app(ia6ue la
formule (11.31)
avec au moins 7
modes.
C'est donc un
interet de plus
des termes res i-
duels ,formule
(11.37) ou on uti-
lise un seul mode.
134
REPONSE TEMPORELLE - METHODE DE LEUNG
a
loo -
-loo
REPONSE TEMPORELLE - LEUNG
O I 2 3 4 5 b
TEMPS DOBSERVATION
SANS TERME RES. --- AVEC TERME RESI.
loo -
I-zoO-
3,, o
zL'-J
-50-
REPONSE TEMPORELLE - LEUNC
100 i I
0 1 2 3 4 5 b
TEMPS D'OBSERVATION
- SANS TERME RES. ---- AVEC TERME RESI.
(II.38a) .(:1-)
(11.39)
135
1.4 EXPRESSION DE LA MASSE RESIDUELLE
D'après les équations (I.373b) et (I.374b) les masses résiduelles en formulationmatricielle s'écrivent au premier et au second ordre respectivement
T r Tt1'- M' r,c)(r\'?-r ...v-r
(II.38b) = M'' 'i, t'-)(.t )' MM'
où %' est la matrice des défonnées statiques, )( la matrice des modes encastrés et
l'inverse de la matrice spectrale.
11. CARACTERISTIOUES RESIDUELLES EN ANALYSE DE SENSIBILITE
11.1 PROCEDURE GENERALE
On se place ici en formulation classique de déplacement. En analyse de sensibilité,
l'influence des perturbations de structure sur les valeurs propres d'un système mécanique est
déterminée par un développement asymptotique à partir des premiers modes normaux du
système de base.
La méthode proposée dans cette partie tient à diminuer les effets de troncature modale. II
s'agit de modifier les perturbations structurales avant l'application des relations de sensibilité.
L'on calcule les variations dans les formes des modes et les fréquences naturellesinduites par la modification des ternies dans les matrices de masse et de rigidité, (R 56) à
(R 57) . Cette approche permet de détecter les variations structurales qui induisent un décalage
des fréquences pour mieux estimer le système. Elle ne nécessite pas le calcul complet des
nouvelles fréquences des systèmes perturbés et évite ainsi un temps de calcul excessif. On peut
l'utiliser pour estimer le gradient d'une fonction coût, ou dans les procédures d'optimisation,
(R 59 ) et (R 68 ) , ou dans la correction de modèles Eléments Finis basés sur les tests
vibratoires, (R 60) et (R 63).
On considère une structure conservative et non amortie dont les modes normaux disciets
sont solutions de l'équation
136
L'objectif est d'obtenir par un calcul simple les solutions du problème spectral perturbé
suivant:
(11.40) (ç. + 5. = a5t (iLes variations L K et A. M ont une norme plus ou moins faible liée aux matrices Ç
et .N du problème de base (11.39)
(II.41a) tç. . E A.
(II.41b) LUI. =. E. 2
On applique ensuite la méthode des perturbations aux éléments propres
(II.42a) = co - E. c,& Ç 4
(II.42b) - 3L--Dans la pratique, on se contente de faibles perturbations et on utilise un développement
limité au deuxième ordre.
Si les modifications concernent seulement un faible nombre de degrés de liberté dans le
modèle Eléments Finis, il est intéressant d'introduire la matrice de flexibilité correspondante.
L'équation (11.40) devient alors
(11.43) - t3 & ) x ç = o
où les matrices de souplesse S = ( S ij) et K et A.M correspondent aux
noeuds concernés par la modification. La matrice de souplesse S est une sous-matrice de la
matrice (k.... - 5 Ces composantes s'écrivent à l'aide des modes normaux:
où .
Les nouvelles pulsations apparaissent comme les valeurs qui annulent le déterminant du
système homogène (11.43)
137
(11.45) Ltk () ( r - r o
Les choix de ¡i et Eii sont liés aux valeurs imposées deEn accord avec les méthodes de synthèse modale, (R 46, 62, 64 et 65 ) les nouvelles
solutions propres peuvent résulter du système suivant:
(11.46) (n' + A <- X =(t + XT n x)
où
(11.47) = s: 1)
e-tr
X étant la matrice modale des déplacements des N premiers modes de la structure.
Pour obtenir une relation entre les nouvelles solutions et les anciennes, il est nécessaire
de calculer les termes d'ordre ¿levé dans les développements (II.42a) et (II.42b). RYLAND a
proposé, (R 54) une procédure basée sur la décomposition de CHOLESKY de la matrice de
masse et une projection dans la base des vecteurs propres.
Les équations (11.39) et (11.42) conduisent aux relations:
(11.48) = x'q (&_cJ3)X&.
etN
(11.49) = - -.z, (.t'fÇj.
Les termes d'ordre zéro sont liés aux conditions d'orthogonalité des modes normaux
(II.50a) XTMXJ= ç
(II.40b) %(. X = !- c
On constate qu'à l'ordre un, la correction du k ème mdde n'améliore pas les autres
modes. Il devient donc nécessaire dtutiliser les termes du deuxième ordre pour obtenir une
meilleure estimation
(11.51) °2..L)(rÇ
Ç_ c02k B i- A) B . 5: )(I_
138
Afin de déterminer les termes o& et P; des développements limités (II.42a) et
(II.42b) à l'aide de la matrice de flexibilité introduite dans l'équation (11.43), on fait varier
l'égalité triviale suivante:
(11.52) (K - 4 N) ( K - cMt. I\1t: IOn obtient
(II.53a) ( 4A. - ¿t3. ')s + SAS o
c'est-à-dire
(II.53b) A 5 - S Ç A - s
En introduisant la relation (11.44) dans l'égalité (II.53b) à gauche comme à droite, on
obtient les relations d'ordre un. VAN HONACKER, (R 55 ) utilise cette procédure pourobtenir les relations de sensibilité pour une structure amortie et les termes du second ordre
(11.51) dans le cas non amorti. BRANDON, (R 36 ) a obtenu des résultats similaires en
appliquant la méthode des perturbations aux modes complexes.
Mais peu d'études ont été faites sur l'influence de la troncature modale dans le calcul des
dérivées des valeurs propres. Dans le cas de l'utilisation de l'équation (11.43), ff10 HIRAI,
(R 64) et (R 65 ) a proposé l'introduction des termes résiduels pour réduire l'influence de
la troncature dans l'expression de la matrice de flexibilité en équation (11.44).
(11.55)
'ç L
L Ct) +
(L.) (L)= G (wo) -
En accord avec les travaux de LEUNG, ( R 31) à (R 35 ) , les termes résiduelssont donnés par
co
où
(11.56) G11 =

Plusieurs auteurs ( R 23 ) et ( R 70 ), ont proposé l'utilisation des caractéristiquesrésiduelles en synthèse modale. En se limitant aux termes du premier ordre, les solutions
propres du système perturbé vérifient l'équation standard suivante:
(11.57)
où
--(11.58) KR = SR
V est le déplacement des noeuds concernés par la perturbation.
XF est la matrice modale réduite sur les noeuds de frontière.
Afin d'améliorer la procédure, on utilise la relation (11.54). Les relations de sensibilité
(11.49) et (11.51) deviennent:
N C. I(I-%(11.59)
=)cj S - ' (Z. ) (L) )( t
p.. + )(_+A).L ()t4Jg
N ((11.60) '= )c. (-'. + ) (x xh, + (E(L) E'i));
Quoique ces expressions permettent de réduire l'erreur induite par le calcul des termes
introduits dans les équations (11.42), ii est intéressant de formuler une nouvelle procédure qui
améliore la convergence de ces séries.
La méthode que nous proposons repose sur l'utilisation simplement des expressions
(11.48), (11.49) et (11.51) appliquées non au système réel, mais au modèle modal (11.57) qui
tient compte de la troncature modale par le biais de la matrice résiduelle de rigidité
ç.
XK(F
I
139
_)ÇtKg
K+ ( JvJt o
o
140
11.2 PRESENTATION DE LA METHODE
1) Théorie
Un important domaine d'application de l'analyse de sensibilité est l'étude de l'influence
d'une modification locale de la raideur d'une structure. Si l'on considère que les noeudsconcernés par la modification sont associés aux déplacements de frontière dans le modèle
discret (11.57), les coordonnées Ui correspondant au modèle modal (11.46) et les déplacements
Vi vérifient les équations suivantes
(11.61) (u1:)
(11.62) (F ) tA Çv)
où Q est le vecteur des coordonnées modales apparaissant dans l'équation (11.46) et
les forces exercées par la structure sur l'organe de rigidification, de matrice de rigidité
Les vecteurs de déplacements U et V vérifient:
(11.63) F=KR(U-V)
La matrice de rigidité résiduelle KR prend en compte les modes non retenues. En
accord avec la relation (11.4a), cette matrice s'obtient à l'aide de la matrice de flexibilité statique
ST sous-matrice de la matrice K1 associée aux noeuds de frontière.
(11.64) Sr - -n- = sf_
Dans le cas d'une structure libre où on ne peut définir K1, une matrice depseudo-flexibilité statique présentée en ANNEXE 2 permet de remplacer ST
En éliminant le vecteur V dans les équations (11.62) et (11.53), il vient
(11.65) (1 + ¿Ç Se.) F
Le modèle modal (11.46) est ainsi lié à une nouvelle matrice de raideur de perturbation
(11.66) = ( p.)..1
La méthode consiste à appliquer les relations de sensibilité établies précédemment au
modèle modal (11.46) et construit avec N modes normaux x
Si la perturbation L K est introduite comme une distribution de raideur additionnelle
de frontière en FIGURE 1.5, on obtient en se contentant des termes du premier ordre
(II.66a)
(II.66b)
k= ct -- ¿
;i )&%1çç.CA.- W2
141
La méthode proposée a été illustrée par une perturbation de raideur. Il est possible de
l'étendre à une modification plus complexe de structure. C'est l'objet de l'ANNEXE 5
2) Exemple de validation
On introduit une perturbation de rigidité de frontière au modèle Eléments Finis de plaque
rectangulaire de référence pour illustrer la méthode proposée.
FIGURE 11.2
On analyse les résultats obtenus par un calcul direct en Elérnents Finis ou Synthèse
Modale et ceux de la méthode de sensibilité. La perturbation en raideur est croissante et la
raideur uniforme k sur les 39 DDL de frontière varie de 10 N/rn à 10 N/rn
Les tests réalisés portent sur les deux premiers modes qui sont en fait les modes de
branche obtenus par chargement en raideur et définis dans la partie IV du chapitre 1.
142
Pour mettre en évidence l'influence de la prise en compte de la souplesse résiduelle
de frontière SR, on applique deux fois la méthode de sensibilité avec d'une part SR debonne qualité et d'autre part SR nulle. SR nulle s'écrit:
I Io
Alors que pour la vraie valeur de SR calculée avec 6 modes libres, les termes diagonaux
sont de l'ordre de 10 m/N. On compare ensuite ces deux essais aux résultats de la synthèse.
Analyse fréquentielle
Les courbes obtenues prouvent que les faibles perturbations (jusqu'à k = 1000 N/rn)
sont peu sensibles à la souplesse résiduelle. Les 3 courbes sont identiques dans cette plage
de perturbation. Au delà de k = 1000 N/rn, la méthode de sensibilité donne des résultats qui
convergent vers les valeurs exactes à trouver si l'on tient compte de la souplesse résiduelle
de frontière. Sinon, la divergence est très rapide comme l'indiquent les courbes.
II convient de noter cependant ue la méthode sensibilité devient inapplicable pour les
grandes perturbations (au delà de 10 N). C'est ce que l'analyse de la forme modale met en
valeur.
Analyse de la forme modale
On s'est intéressé à la forme du 1er mode libre dont la fréquence initiale est
fo =70.447 H Z , sans aucune perturbation. On a réalisé la synthèse et la sensibilité avec les
6 premiers modes libres (voir Tableau Al). Le 6° mode libre a pour fréquence
f6 = 23 8.683 HZ, soit une pulsation au carré de l'ordre de 10 6 (rd/s )
* Pour une perturbation A Kfaible : 4 K = 10 N/,nLa valeur réelle de SR donne une matrice de l'ordre de 10 rn/N pour ses
composantes. Notre matrice SR nulle est diagonale et de coefficients constants sur la diagonale
Dans les deux cas de matrices SR ( SRl = SR bonne et SR2 = SR nulle ),tÇ d'après la formule (11.66 ). Comme XF a des composantes de
l'ordre de 10 ( vecteur propre normé par rapport à la matrice de masse (M)), le produit
scalaire X F A K XF donne une valeur faible, et de l'ordre de l'unité. On trouve
naturellement des fréquences très voisines, à partir de la formule (ll.66a) pour la méthode
de sensibilité avec SRl et SR2fi = 74.608 HZ (synthèse avec SRl ) ; fi = 74.657 HZ (sensibilité avec SRl)
fi = 74.819 HZ (sens ibilité avec SR2).
143
A cause de son dénominateur qui est de l'ordre de 10 , le reliquat:
'(t XFs-
est une quantité faible, voire négligeable devant X dans l'expression (II.66b) qui
donne X. Nous trouvons donc la même déformée, en synthèse comme en sensibilité. Le
Graphe a été réalisé pour la souplesse SRl.
C* Pour une forte perturbatzon :4K = 10 N/rn
La quantité XF.A K XF est forte et on obtient les fréquences suivantes
fi = 211.911 HZ (synthèse avec SRl) ; fi = 322.481 HZ (sensibilité avecSRl) et fi = 254.037 HZ (sensibilité avec SR2). Cette divergence des valeurs se traduit
aussi par des déformées différentes car le ternie : X )(ç
devient important. - (.4) 2.
Pour la souplesse SRl, la sensibilité donne une déformée quelconque qui est loin de la
déformée exacte obtenue par synthèse ou par Eléments Finis. C'est le Graphe
Remarque:La bonne valeur de la souplesse résiduelle SRl permet d'obtenir des déformées
semblables aux déformées exactes obtenues par Eléments Finis. C'est pourquoi il estintéressant de comparer les déformées issues de la synthèse et de la sensibilité à paritr de SRi
lorsque la perturbation de frontière croit.
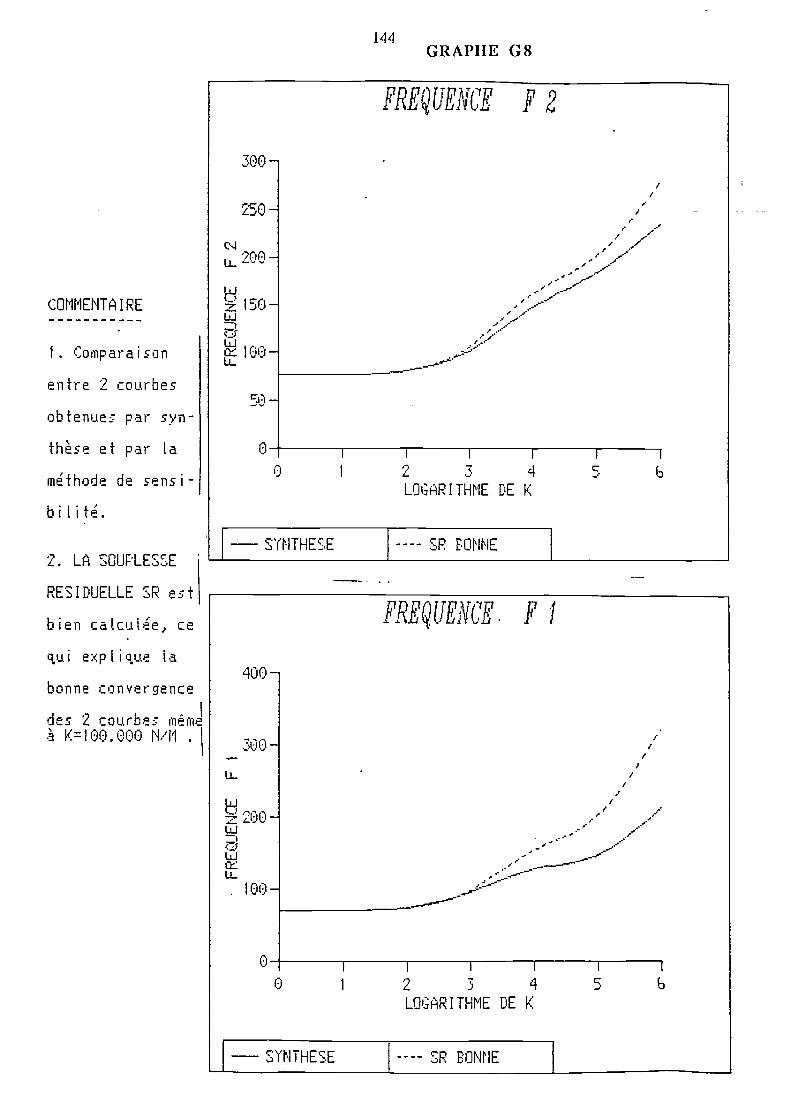
COMMENTA I RE
1. Comparaison
entre 2 courbes
obtenues par syn-
thèse et par La
mfhode de sensi-
bi it'L
,1 i A 'fj ir,, rr'L. UI UU-Lt..
RESIDUELLE SR est
bien caLcute, ce
i ex p L i Q.UC (a
bonne convergence
des 2 courbes mêïeà K100.COO N/H
400 -
300 -
20O-
144GRAPhE G8
300 -
250 /
200 -
-
FREQUENCE F 2
- SYNTHESE SR BONNE
..- ..,
-- .-__,,_
150w
LiJQ 1O'-LL
r/ -- r
r-,. .-.
0 1 2 .3 4 5 b
L'JGARITHME DE K
FREQUENCE. F i
//
I
f/
0 1 2 3 4 5 b
LOGARITHME DE K
'r --________._-
-r
100
O I i I I I
r" r-urc' - SR BONNE
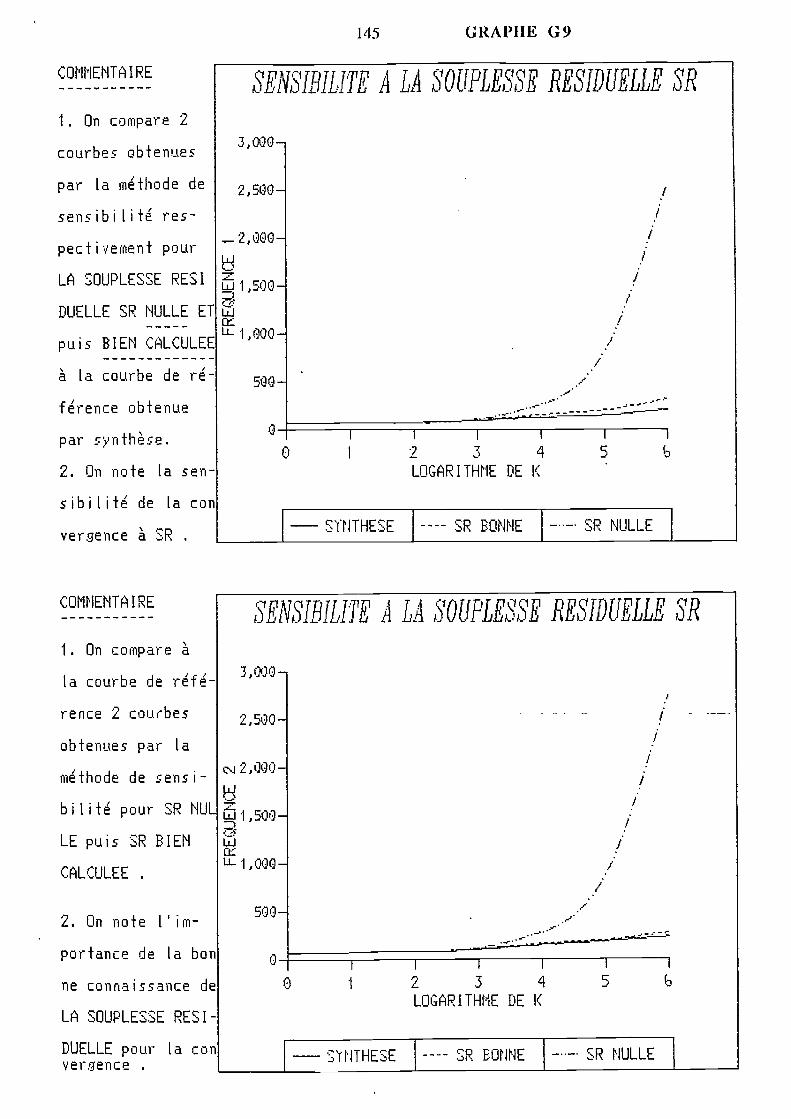
COMMENTA I RE
i . On compare 2
courbes obtenues
par La rnthode de
sensibILité res-
pect i veinent pour
LA SOUPLESSE RESI
DUELLE SR HIJLLE ET
puis BIEN CALCULEE
à La courbe de r-
frence obtenue
par synthèse.
2. On note la sen-
sibilit de la con
ver.gence à SR
COMMENTA I RE
I . On compare à
La courbe de rf-
rence 2 courbes
obtenues par La
méthode de sens i-
bi[it pour SR NUL
LE puis SR BIEN
CALCULEE
2. On note Vim-
portance de La bon
ne connaissance de
LA SOUPLESSE RESI-
DUELLE pour La conver gence
500-
SENSIBILITE A LA SOUPLESSE RES IDUELLE SR
3,000-
500-
o
O
I j j j j j
2 3 4 5
LIJGARITHME DE 1<
- SÎNTHESE ---- SR BONNE -- SR NULLE
145 GRAPhE G9
0 I j I t j
O I 2 3 4 5
LOGARITHME DE K
- SÏNTHESE ---- SR BONNE -- SR NLILLE
SENSIBILITE A LA SOUPLESSE RESIDUELLE SR
.3,000
21500- f
/
u1,500-
bJ
U- 1,000-
2,500-
J
2,000-t
H /
/
500- i/
LL1,000_
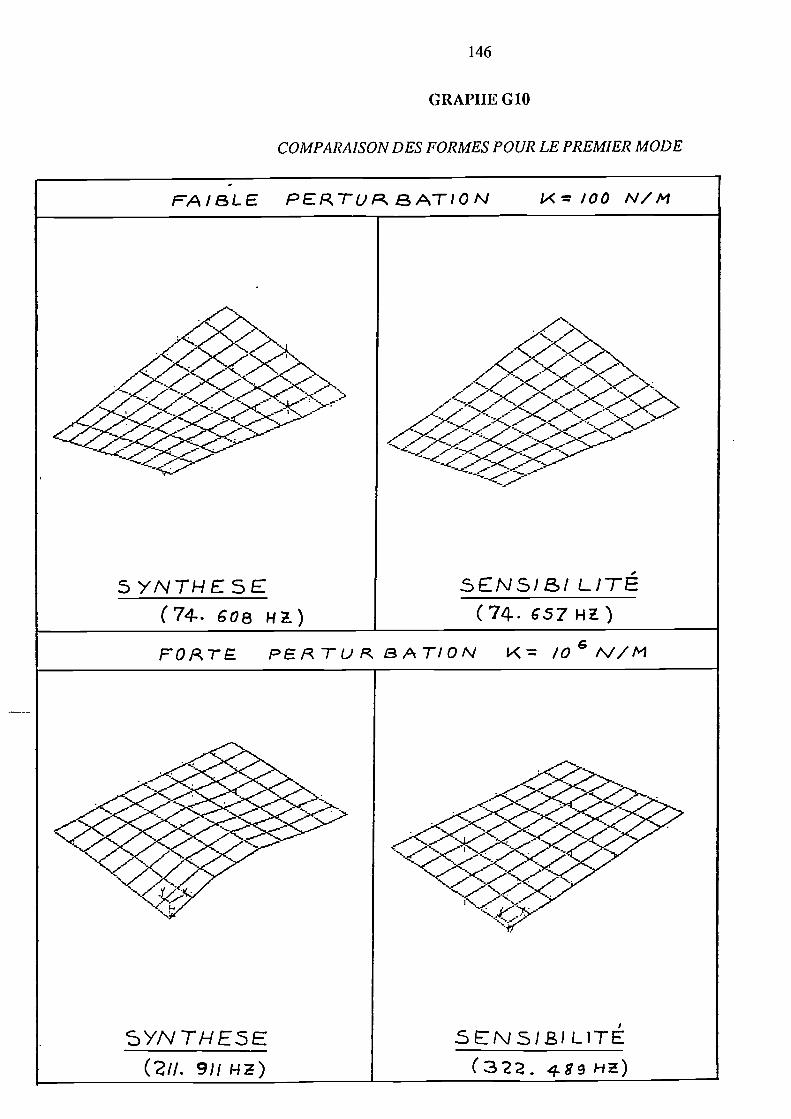
146
GRAPhE GlO
COMPARAISON DES FORMES POUR LE PREMIER MODE
F4/SLE PEPYUP..SATION ¿'<=100 N/d'1
4 >
3Yt'ITHE5E 3EN5181 LITÉ(74. i-ia) (74. G57H.)
FOR7 PERTUI3ATION /Q/V/t1
5YNTHE5E .SEN5I3ILIT(2/i. 9JiH) (322. 4g9H)
CONCLUSION
Les différents tests numériques réalisés dans ce chapitre confirment l'importance des
caractéristiques de frontière qui était déjà mise en valeur au chapitre 1. Leur prise encompte dans d'autres techniques d'analyse modale telles que l'analyse de sensibilité améliore
les résultats des essais.
Afin d'obtenir une meilleure connaissance de la réponse dynamique des sous-structures
par synthèse modale ou par assemblage, l'on introduit des méthodes de correction qui ont pour
but de recaler les caractéristiques des frontières utilisées lors des essais. C'estl'objet du chapitre 3.
147
148
CHAPITRE 3CORRECTION DES CARACTERISTIQUES
DE FRONTIERE
149
CIIAI'ITRE 3
CORRECTION DES CARACTERISTIQUES
DE FRONTIERE
INTRODUCTION
METIIODES DE CORRECTION
1.1 MINIMISATION D'UNE FONCTIONNELLE "ECART"
1.2 CORRECTION DIAGONALE MATRICIELLE
1.3 CORRECTION GLOBALE MATRICIELLE
1.4 CAS DES CARACTERISTIQUES RES IDUELLES DE FRONTIERE
APPLICATION AUX FRONTIERES A FAIBLE NOMBRE DE DEGRES DE
JJIBERTE
11.1 PROCEDURE GENERALE DE CORRECTION
11.2 APPLICATION EXPERIMENTALE
APPLICATION AUX FRONTIERES A GRAND NOMBRE DE DEGRES DE
LIBERTE
ffl.1 CREATION ET IDENTIFICATION DES MODELES
111.2 CORRECTION EXPERIMENTALE DES MATRICES MODALE ET DE RAIDEUR
IH.3 CADRE D'UTILISATION
CONCLUS ION
INTRODUCTION
Les méthodes de correction en Dynamique des structures ont pour but de recaler les
modèles numériques représentés par une matrice de masse et de raideur afin que lescaractéristiques des modes mesurés correspondent à celles des modes calculés.
Les corrections concernent les matrices de masse et de raideur. Dans la première partie de
ce chapitre nous présentons en formulation primale les principales techniques de correction:
*Minimisation d'une fonctionnelle "écart" * correction matricielle diagonale * correction
matricielle globale et méthode de sensibilité déjà étudiée dans le chapitre précédent.
Nous montrons ensuite comment ces méthodes se développent dans le cadre des matrices
résiduelles utilisées lors des raccordements de sous-structures. Il devient alors nécessaire
d'envisager deux types de fontière adaptés à des techniques de raccordement différentes.
On étudie dans la deuxième partie les frontières avec un faible nombre de degré de liberté
où il est intéressant et efficace de corriger les termes diagonaux des matrices résiduelleslocalisées aux interfaces. On a adopté pour cette étude la formulation primale et duale.
La troisième partie, essentiellement en formulation primale, est consacrée aux frontières
avec un grand nombre de degré de liberté. On y applique différentes techniques de correction
afin de réaliser une meilleure synthèse des sous-structures, et donc un assemblage proche de la
réalité:
I. METHODES DE CORRECTION
1.1 MINIMISATION D'UNE FONCTIONNELLE "ECART"
On recherche un ensemble de paramètres de contrôle qui minimisent une fonctionnelle
représentant l'écart entre les caratéristiques modales mesurées et calculées. Les gradients
calculés pour réaliser cet état stationnaire reposent sur les techniques de pénalisation, de la
définition d'un état adjoint ou bien l'utilisation des dérivées des fréquences de résonance et des
modes de vibration. Nous illustrons cette dernière procédure par la correction d'une matrice de
masse et d'une matrice de raideur.
1) Correction de la matrice de raideur (K )
On suppose ici que la matrice de masse (M] est exacte et on se contente d'une
correction de la seule matrice de raideur. On décompose à cette fin (K) en ' matrices [Ko
telles que:
150
t 1.
On cherche la matrice corrigée (< J sous la forme
(111.2)
ou bien1
(111.5) '. (c-o&
(III.7a)
(II1.7b)
où les 1) sont des paramètres de correction. corrige globalement la matrice
du sous-système L s'il est différent de 1, sinon cette correction n'a lieu.
On recherche ensuite les paramètres ' de correction qui minimisent la fonctionnelle
suivante:
(111.3) J () =.2..
où les (t) désignent le carré des 'vn.. pulsations calculées et co les valeurs
correspondantes du modèle corrigé.
L'intérêt de cette méthode réside dans le fait que les seules données expérimentales
utilisées sont les fréquences propres, données en général exactes.
La stationnarité de s'écrit:
(111.4) o)) o L C-t, tJ
*On se sert ensuite de l'orthogonalité des modes )Ç du modèle corrigé, soit:
(III.6a)
(III.6b) -.1.
r * ,,,= Çv..)x
L'égalité (ffl.6a) induit les relations suivantes
1>ç
151
- L4')
¿_\ ,wJ
*1L 'X'3.
c t.i.,
E: t«t. Th3
L'équation (111.5) permet alors d'écrire:
(111.8)
(111.10)
(111.12) t.
n, 'J" J'.1-':. 1)X& (aa) X&)(.q1 ¿=1
. ,
(-°?. )c t)xk CE
Ce système matriciel peut s'écrire encore:
(111.9) =
où A est une matrice carrée 'n. c'vì. , de termes C
()et est un vecteur colonne de dimension n et de composantes L
(111.11) z 'J X Ç <-Cj X E Li., -)I q3
2) Correction de la matrice de masse (M T
La procédure utilisée est analogue à celle qui a permis le recalage de la matrice (K)On suppose donc que la matrice de raideur est exacte et on divise la structure ensous-structures. La matrice de masse du modèle initial s'écrit:
152
où (ri 3 est la matrice de masse de la sous-structure C.
La matrice de masse du système corrigé s'exprime
(111.13) 1t)où les sont des paramètres de correction
Çk)
153
En posant
(III.14a) 1 /c [t, en.)
(III.14b), .
. C. t,
conformément aux notations introduites dans la relation (111.3) on définit unefonctionnelle J' suivante:
(111.15)
=ç,
J'On doit rechercher les paramètres ir, de correction qui minimisent cette fonctionnelle
Une démarche analogue à celle utilisée dans le cas de la correction de la matrice de
raideur conduit au même système matriciel (111.8) oùon remplace les vecteurs propres de
ÇM'(V) parlesvecteurspropres 'y. de
Il convient de remarquer que la matrice('') n'est plus inversible si la structure possède
des modes de corps rigides. Néanmoins, plusieurs procédures numériques permettent même
dans ce cas de calculer les vecteurs propres et d'appliquer la méthode sur 'vn. modes
élastiques.
Correction simultanée de (K') et (M')
Dans les deux recalages précédents, on a chaque fois supposé que l'une des deuxmatrices était exacte. La validité du résultat obtenu dépend donc de cette hypothèse. Il apparait
donc utile d'envisager une correction simultanée des deux matrices de masse et de raideur.
Plusieurs techniques permettent de réaliser cette correction simultanée, dont une méthode
itérative simple, alternant les deux corrections et convergeant rapidement vers la solution exacte.
Commentaires
Le rang de la matrice (A en (111.9) dépend de la structure et du choix des
sous-système i de matrices de raideur (Ki) ou de masse (Mi')Dans la perspective de pouvoir appliquer cette méthode de correction aux matrices (SR)
de souplesse résiduelle de frontière, on est confronté à un problème de taille du calcul.
En effet pour une frontière de raccordement de P dégrés de liberté (DDL), (SR) est
une matrice carrée d'ordre P. Si l'on souhaite corriger les P x P termes de (SR) , la matrice
(A) a alors pour ordre P x P, ou éventuellement P x (P + 1)/2 si [SR) est symétrique.
Dans le cas par exemple de notre plaque d'acier avec 39 DDL de frontière, SR) estsymétrique et la correction de tous ces coefficients conduit à une matrice carrée [A) d'ordre
1365.
154
La méthode présentée n'est donc envisageable que pour une frontière à très faible
nombre de dégrés de liberté.
1.2 CORRECTION MATRICIELLE DIAGONALE
Cette correction porte sur des matrices de petite taille obtenues lorsque les perturbations
sont localisées. Ce sont des matrices de souplesse dynamique (S relatives aux noeuds
impliqués dans la correction. Les fréquences de résonance du système perturbé apparaissent
comme les valeurs qui annulent un déterminant de faible dimension associé à la matrice (s)La correction (tx. S) de cette matrice (s) est recherchée sous la forme d'une matrice
diagonale (E) . Les k éléments de [) sont calés de façon à obtenir les fréquences de
résonance exactes de k modes de branche lorsqu'on introduit une matrice de souplesse (s B)associée au chargement de frontière.
Cette méthode est développée dans le cadre des frontières de
raccordement à faible nombre de degré de liberté.
1.3 CORRECI'ION MATRICIELLE GLOBALE
Contrairement aux méthodes précédentes, ces techniques de correction définissent des
perturbations globales des matrices de masse, de raideur ou des modes. Elles sont basées sur la
minimisation de la norme de ces perturbations en imposant des conditions d'orthogonalité et le
respect de certaines relations spectrales.
Ces méthodes ont été proposées dans plusieurs articles par BERMAN (R17, R18)
BARUCH (R19, R20) et récemment par KABE (R 21).
1) Correction de la matrice de masse
On suppose que la matrice de masse expérimentale (M) comporte des erreurs et on
introduit la perturbation ( M) qui permettrait de vérifier la relation d'orthogonalité
(111.16)-r
( (ii) .- Çat)) I
où X est la matrice modale rectangulaire des modes discrets et I la matrice d'identité.
Comme la matrice X est non inversible, l'équation (111.16) admet une infinité de
solutions (& M ) . Mais on recherche la solution qui minimise la quantité
(111.17) E. U ('ii ( t- (i)I[

(111.21)
155
On introduit alors la fonction lagrangienne suivante:
les équations de stationnarité se mettent sous la forme:
(111.19) Y ( t ri) Ç ri ) - + x Ç > tÇ) 'x'
d'où
(111.20) Ç t ti Ç M XS)-r x M)
De même, la relation de contrainte (111.16) permet d'écrire:
r ,X \ (Ii) - t (ri)x (Xifl' )(r Çr)') x
(111.24) ( O) + ( 'vc)) ç (.f'C) %
I
La matrice modale X est supposée exacte, de même que la matrice de masse (M).est la matrice spectrale expérimentale.
On impose à la perturbation (A )d'être symétrique:
(111.25) Ç .i'. ) =%,(
On introduit la fontion lagrangienne L suivante
11 vient en définitive
(111.22) s:_ = (xT çx (t-L'équation (111.20) permet alors d'obtenir le résultat cherché:
(111.23) (dii) M) x (x'(r-) x) (r - x) (X(t1 Xit )(' (ti)
2) Correction de la matrice de raideur
On introduit la perturbation Ç,LS K) pour corriger la matrice de raideur (K) afin de
vérifier l'équation modale suivante:
(111.18) '± 6 + E L > ( X'( (M) + (A t-i)) X - t ) Ç'.=-1.
En différentiant la fonction '42 par les composantes ( t-). de la matrice (Ari),

(111.29)
d'où la valeur de la perturbation
(111.30) Çc = - Cî) (cñ X(t'i') - . (r') ( çj) (ti)
Pour éliminer la matrice ( ), on ajoute à cette équation sa transposée et on utilise
(111.25) et (111.28):
(111.31) (A - Çti) (0L) f - ÇM)X (jrçrl)
En tenant compte de la relation (111.24), l'équation (111.31) multipliée par X donne
(111.32) Çr\')x ..n!L = Ç.) X - (M') (cÇ) - (t)x (Ç' (t-fl x
sous l'hypothèse
(111.33) (ri') x X" (n') ÇLj)
Les multiplicateurs de LAGRANGE s'écrivent à partir de l'équation (111.32):
(111.34) Ç1fl (ri13(v)x - XX r(,<) X -
156
(111.26) L = E. + - 2 s (( (R 1- ( t ic)) x -'%
i- ç
qu'on cherche à minimiser afin d'obtenir une perturbation (Lw:) qui vérifie les deux
équations (ffl.24) et (ffl.25) et qui Soit de norme minimale:
(111.27) s = II(*lI( A)
La matrice de terme général ( des multiplicateurs de LAGRANGE associés à la
condition (111.25) est anti-symétrique
(111.28) (g, - ,
En différentiant la fontion L par rapport aux éléments de (Atk'), on obtient des
équations de stationnarité qui s'écrivent sous cette forme condensée:
(11yt A<) cr' + .2 (o1ç') + .2. ?"i O

157
L'expression de introduite dans la relation (111.31) permet d'obtenir en définitive:
(111.35) (a. ) ()Xx(r-') - Ç\)xx(s) + (Ms)xx' ('(ri)+
3) Correction des modes
On souhaite corriger la matrice modale X des modes discrets de la structure afin de
vérifier la relation d'orthogonalité suivante:
(111.36) r S))( = I
Comme dans les méthodes précédentes on minimise la fonction lagrangienne suivante:
(111.37) E. + - Çx'çrl)x - T5)
avec
l/.(111.38) E :: Çtis) (x-x0)\\
où X0 est la matrice initiale.
On impose à la matrice ( c) d'être symétrique à cause de l'équation de contrainte
(111.36), soit
(111.39) .
En différentiant par rapport à chaque composante de X , les équations de
stationnarité donnent:
(111.40)- .2 (M) (X-;s) + ¿ ()'x °
En simplifiant cette égalité par la matrice (M) qui est inversible, il vient:
(111.41) X ( + ( ))j1S)
=
On obtient alors les multiplicateurs de LAGRANGE en reportant la relation (111.41) dans
l'égalité (111.36)
158
(111.42) = Çx' (fi)X0)1/'2. I
En tenant compte de l'équation (111.41), ii vient:
(111.43) X = )Ço (x Ç ri x-1/
Plusieurs algorithmes itératifs pennettent de déterminer la matrice modale X corrigée.
Nous avons retenu celui-ci dans nos tests numériques. Il a l'avantage de n'imposer aucune
condition de norme sur la matrice Ç.M') et converge généralement au bout d'une dizaine
d'itérations
(_) (k) (k) -t(111.44) X X ( t + (x (M ) )
4) Correction sélective de KABE
Soit ÇK) une matrice carrée qu'on perturbe pour qu'elle vérifie cette relation de
contrainte
(111.45)
X est une matrice rectangulaire
est une matrice carrée dont les coefficients vérifient
(111.46) O - = o
Le produit symbolique 0 s'écrit
(111.47) Ç e C<'cÇ Y)
Comme la contrainte (111.45) n'est pas vérifiée
(111.48) T X = A
on introduit la fonction lagrangienne
(111.49) ' = . + (x' (c e ) x - ) c
où les ) sont des multiplicateurs de LAGRANGE
XT(tçø) X =,E
d'où:
(111.51) 0 =
En différentiant l'égalité (111.49) par Ç'r) , les équations de stationnarité donnent:
(111.52) . Ç - (KY) o (XTXr) o
On multiplie l'équation (111.52) symboliquement par K à gauche
(111.53) - + + , (x' O Ç o (XxT) =0
On multiplie symboliquement l'équation (111.53) par X à droite et par XTà gauche,
(111.54) X'(x)X --x' Ç< o)x + ,X çXcT))X O
ou encore
(111.55) - A i- E. 4 ><T (X .,fxT)) X
soit
(111.56) T ÇXII,Tx1))x = (A
ce qui donne cette relation entre les composantes
(111.57) E1 . )e Ç.Av -ç*..
On pose
T L T(111.58) R 'n - q. t 'E.. Z x ç. x e x.
a
d'où
(111.59) E R .n. Qi T.2k. (A ' - E.
159
(111.50) E. I -
où est une matrice (i) vérifiant
160
qui permet de déterminer la matrice ( ).II convient de remarquer que
(III.60a) fQ-
(III. 60b) ,.' . E . i.
On se sert ensuite de l'équation (111.52) pour écrire
(111.61) = 6)(4 'ñe X 4-e: . o
On multiplie cette égalité à gauche par
(111.62) V - 't , )(k6
En posant
(111.63) <t4 Y
il vient
(111.64) '
1r r
1.4 CAS DES CARACTERIST!OUES RESIDUELLES DE FRONTIERE
1) Introduction des caractéristiques résiduel les de frontière
Dans les assemblages de sous-structures, les interfaces de raccordement sont souvent
mal modelisées. Pour atténuer les effets pénalisants de la troncature modale d'autre part, il est
nécessaire d'introduire des termes résiduels aux frontières. Mais dans un contexte expérimental,
ces caractéristiques de frontière sont mal connues. Une procédure d'identification de ces termes
a été proposée par JO. GIMENEZ ( R67 ).Elle consiste à faire un lissage par moindre carré des courbes d'impédance tout en
imposant le caractère défini-positif à la matrice de souplesse résiduelle. Néanmoins, il n'existe
pas à notre connaissance, d'études spécifiques sur le recalage des termes résiduels. Ce qui
devrait avoir l'avantage d'améliorer considérablement les procédures d'assemblages.
161
Dans un contexte numérique, nous nous proposons d'introduire des caractéristiques de
frontière qui seront ensuite recalées pour améliorer le raccordement dynamique desous-structures.
La matrice de souplesse dynamique s'écrit
M
(111.65) S s(L) +-w+W L&
où X.ç est constitué des déplacements de frontière induits par le . ' mode libre de
la sous-structure considérée.
On peut relier les matrices résiduelles à la souplesse dynamique:
(L) L-t N(111.66) S - 51L xçx
Les matrices de raideur et de masse obtenues numériquement permettent de calculer ces
expressions (111.66). Mais elles deviennent inutilisables sur le plan expérimental où l'on ne
dispose que de caractéristiques modales identifiées par des tests vibratoires.
Afin de déterminer avec une meilleure précision ces caractéristiques de frontière, on
introduit des modes de branche obtenus en fixant le long des interfaces de chaquesous-structure des impédances simples.
Au cas où on ne dispose d'aucune matrice de raideur, même grossière, ces modes de
branche permettent de définir des coordonnées généralisées de frontière , bien
représentatives des caractéristiques de frontière dans le domaine fréquentiel des essais
vibratoires.
(111.67) = 2. S r
où x est le déplacement de la sous-structure et les forces de frontière induites par
les v-e mode de branche. D'après l'équation (1.400), on peut montrer que les
composantes modales apparaissant en équation (ffl.65) s'écrivent:
(111.68) - (-O_/ c4Lç,.) Çcß1 XLÇ
est la pulsation de résonance du mode de branche . Le produit scalaire
peut être approché par la matrice de masse de la structure obtenue par discrétisation.
De même les deux familles de modes libres et de modes de branche permettentd'approximer les termes de souplesse résiduelle. Les termes d'ordre i ont pour expression dans
le cas d'un chargement respectivement en masse et en raideur
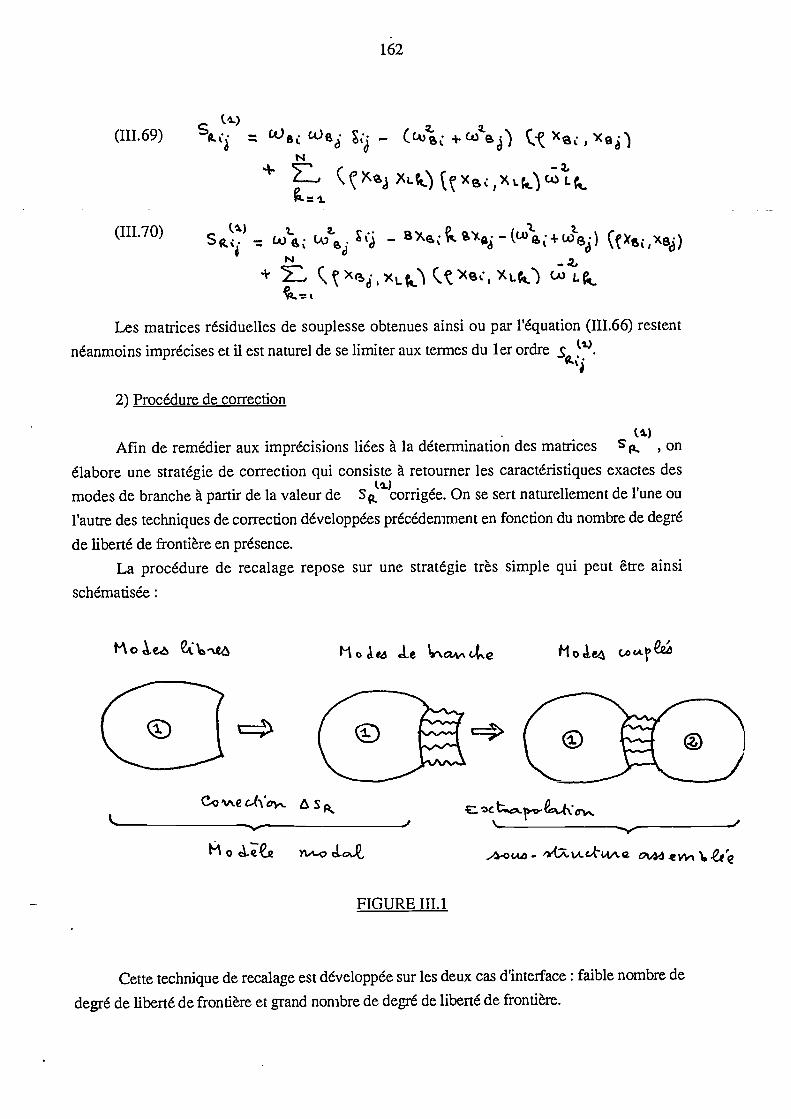
162
(&)(111.69) w81: W - (C.&, 4. Ct)2e) Ç X%t, 'x9fl
N
EL
(t; t 2(111.70)Lt) (A
dva -(u.+ujß.) Ç,xe)
N
+ : ÇX ,XLÇ( (,XL) (A'L
Les matrices résiduelles de souplesse obtenues ainsi ou par l'équation (111.66) restent
néanmoins imprécises et il est naturel de se limiter aux termes du 1er ordre s
2) Procédure de correction
(t)Afin de remédier aux imprécisions liées à la détermination des matrices Sp. , On
élabore une stratégie de correction qui consiste à retourner les caractéristiques exactes des
modes de branche à partir de la valeur de spMorrigée. On se sert naturellement de l'une ou
l'autre des techniques de correction développées précédemment en fonction du nombre de degré
de liberté de frontière en présence.
La procédure de recalage repose sur une stratégie très simple qui peut être ainsi
schématisée:
\O\4 etcR.A Moe cLe yae 1oIe4 (.oA.r&o
vec-ho. ASL
t1Q )A.QcLQ
FIGURE 111.1
Cette technique de recalage est développée sur les deux cas d'interface: faible nombre de
degré de liberté de frontière et grand nombre de degré de liberté de frontière.
A-o - '- tA. W
163
II. APPLICATION AUX FRONTIERES A FAIBLE NOMBRE DE DEGRES DE
LIBERTE
11.1 PROCEDURE GENERALE DE CORRECTION
Dans le cas d'une distribution de masse le long de la frontière , les équations (1.263),
(1.334) et (1.390) permettent de relier les déplacements et les forces de frontière en formulations
primale et duale: -. .(III.71a) ). w MF .fl.ß
*(III.71b) ,\
est une matrice diagonale constituée des carrés des pulsations des modes de
branche.
F est la matrice de masse de chargement sur les noeuds de frontière concernés.
Les relations (1.31 lb) et (1.343) donnant successivement et deviennent:
(IIL72a) (u)) - Ç Ç'
(III.72b) = C. - Ck) -j: - F
Dans le cas d'un chargement en raideur que nous testerons en formulation primale, la
relation (ffl.72a) devient
(111.73) = s (..o) - ; (.çP, P.j') +
où > est la participation des modes de branche sur les noeuds de frontière et est la
matrice de raideur de chargement sur les noeuds de frontière concernés.
Dans chacun de ces cas de chargement, on obtient les valeurs approchées des fréquences
des modes de branche comme solutions de l'une ou l'autre des deux équations déterminantales
suivantes:
(III.74a) cLt ( ?) = o
(III.74b) cLQ-'t (. .) = o
Dans le but de construire des modèles hybrides qui conduisent à une détermination
exacte des fréquences de résonnance des modes de branche, on ajoute des matrices de contrôle
aux matrices de masse et de souplesse résiduelles, soit:

_L. (o)I
f -(III.77b) cQk - 8'
rE o
164
* (o)(III.75a) Sp + v
(o)(III.75b) £lp. = t1. 4 . t-c.
avec
(111.76) o
Ces matrices de contrôle sont prises diagonales car nous imposons k équations de
contrainte par le choix de k modes de branche joints à ivi. modes libres ou encastrés pour
construire les modèles.
Les équations (111.74) deviennent alors respectivement pour les formulations primale et
duale
(III.77a) ckk - .y). (4tß F aB + ( (- ?p
(o).- r Ç..Lo -k
+ ( 2 ye (:-- /wEe.TJ + c. (.s1stif) °
D'une façon générale, plusieurs matrices de contrôle peuvent vérifier ces systèmes de
équations. Mais la solution cherchée doit être de norme minimale et est obtenue par la méthode
de NEWTON avec la matrice nulle comme matrice de contrôle d'initialisation.
11.2 APPLICATION EXPERTMENTALE
L'essai numérique envisagé a consisté a rechercher les modes encastrés d'une plaque
rectangulaire à partir d'une synthèse réalisée avec ses 8 premiers modes libres et 3 modes de
branche obtenus par un chargement en raideur to w 1w.. sur les degrés de liberté de translation
et N /Yr. sur les DDL de rotation) sur les 39 DDL de frontière (voir Figure 111.2).
Les résolvantes des modèles I (modèle de RAYLEIGH-RITZ, sans terme de souplesse
résiduelle) et 2 (modèle de projection, avec une souplesse résiduelle de frontière au premier
ordre) ont été utilisées pour calculer les fréquences de ces modes encastrés.
J+ (L'
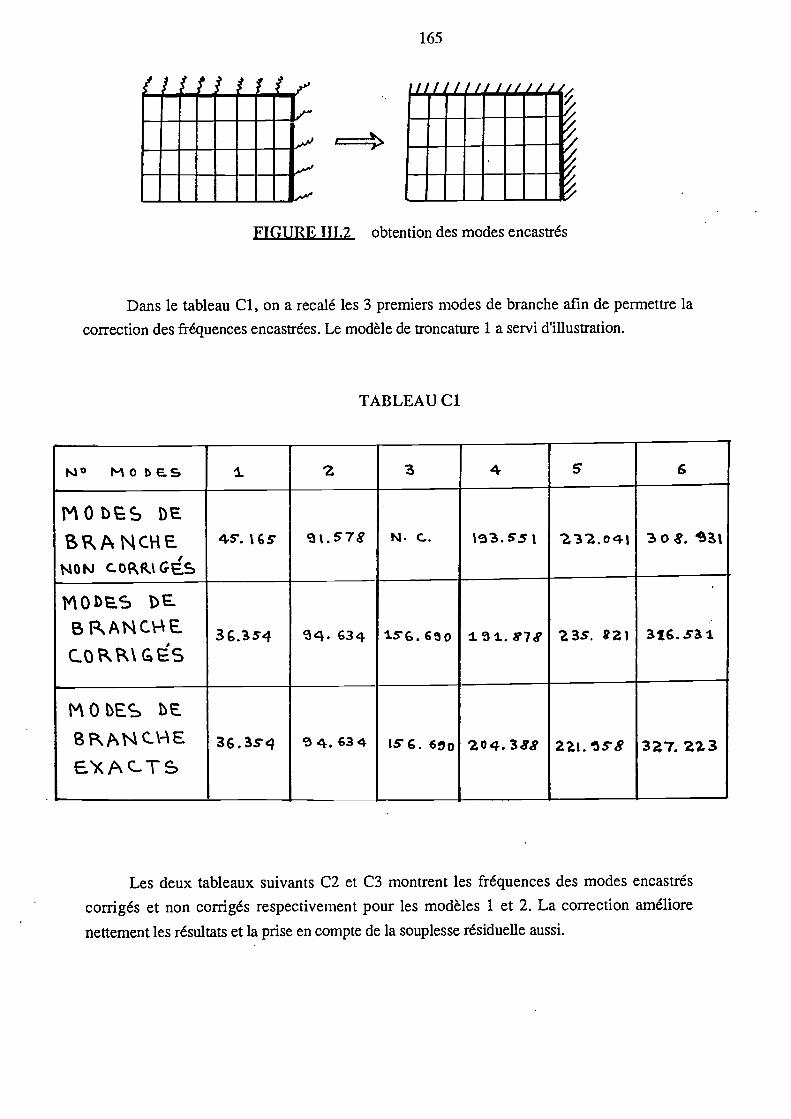
I'll'.'.I'll""lull'lull'
165
aiiiauui11111111lull'u'.'
FIGURE ¡11.2 obtention des modes encastrés
Dans le tableau Cl, on a recalé les 3 premiers modes de branche afin de permettre la
correction des fréquences encastrées. Le modèle de troncature i a servi d'illustration.
TABLEAU Cl
Les deux tableaux suivants C2 et C3 montrent les fréquences des modes encastrés
corrigés et non corrigés respectivement pour les modèles i et 2. La correction améliore
nettement les résultats et la prise en compte de la souplesse résiduelle aussi.
N° MODE.S t 'z 3 4 E 6
MObS tEßRPNCHE
NON COpß,.GS
45.tGS t.57S N. 2.04l O8. %
MObS tEBRAICE 36354 34 t.60 jjgg 23S. R21 326.531
MObES tE8RC-tE 36.34 4.634 I6. 6 204.388 2i.'s8 327223

166
TABLEAU C2
TABLEAU C3
FREUEt10E(H- MODES Et4CP%STRES
t,.iOPAA?.VALEVft.S
wet, cOR.GEsVALEtJRSCog.RG-E.J
VALEJR.SEXAC1S
49 5-4e 37. 423 32 too. s8s' t0$.4 OS1 ZS
3 teZ O teZ. S3g 18g. 48
4 ?.ZS. tO& 2Z0. SZs Z4t.-1.27
s .&8. 470 Z7. 583
FRQ.uaNcES (Ha)bS MoDES EÑCIkSTRES
VALUR.SNOM
VfiLE%JRSjC-op.p..GES
VALEUSExCTE3
t 47Z7 8.8O5 3ß.585
z LO2. 3s tos. 00G tos-. z.s-
3 i.eo. s-O t84. 423 tRG. 486
4 ZZ. 674 205. G38 '24%. ra
N. C. 2.5-4ßp4 7. g3
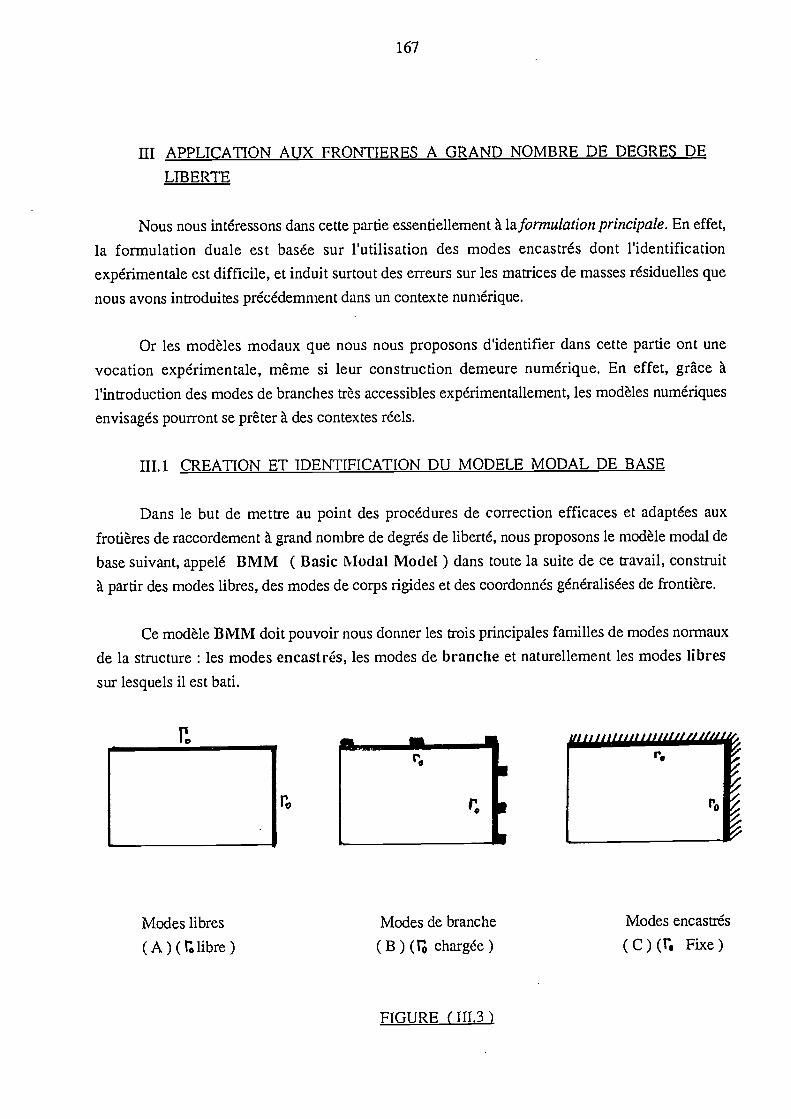
III APPLICATION AUX FRONTIERES A GRAND NOMBRE DE DEGRES DE
LIBERTE
Nous nous intéressons dans cette partie essentiellement à laforinulation principale. En effet,
la formulation duale est basée sur l'utilisation des modes encastrés dont l'identificationexpérimentale est difficile, et induit surtout des erreurs sur les matrices de masses résiduelles que
nous avons introduites précédemment dans un contexte numérique.
Or les modèles modaux que nous nous proposons d'identifier dans cette partie ont une
vocation expérimentale, même si leur construction demeure numérique. En effet, grâce àl'introduction des modes de branches très accessibles expérimentallement, les modèles numériques
envisagés pourront se prêter à des contextes réels.
111.1 CREATION ET IDENTIFICATION DU MODELE MODAL DE BASE
Dans le but de mettre au point des procédures de correction efficaces et adaptées aux
frotières de raccordement à grand nombre de degrés de liberté, nous proposons le modèle modal de
base suivant, appelé BMM ( Basic Modal Model ) dans toute la suite de ce travail, construit
à partir des modes libres, des modes de corps rigides et des coordonnés généralisées de frontière.
Ce modèle BMM doit pouvoir nous donner les trois principales familles de modes normaux
de la structure : les modes encastrés, les modes de branche et naturellement les modes libres
sur lesquels il est bati.
r0
167
r0
Modes libres Modes de branche Modes encastrés
(A)(Tlibre) (B)(Tchargée) (c)(r. Fixe)
FIGURE (111.3 )
respectivement, avec
168
Si tel était le cas, on peut admettre son efficacité pour représenter le comportement de la
sous-structure avec des conditions aux limites quelconques et sa participation à ladynamique de l'assemblage des systèmes mécaniques. Les tests numériques réalisés au cours de
ce travail mettent en évidence cette importante propriété. Ils seront exposés dans les paragraphes
ultérieurs.
Dans le cadre de la formulation primale, les déplacements A de frontière définis enéquation (1.26) s'écrivent pour une sous structure:
(111.78) A XLF L + Xp 9p + Sp. ¿.L = XF c + S t
XLF et XRF sont les participations respectives des modes libres et des modes de corps
rigides sur les noeuds de la frontière F0
SR est la matrice de souplesse résiduelle de frontière ( sur F0 )
est la force généralisée de frontière
XLF = (XRF, XLF) matrice modale des participations des modés de corps rigides et des
modes libres.
9 9 L et 9 désignent les coordonnées modales relatives à XRF, XLF et XF
On associe à l'égalité (111.78) les deux équations modales suivantes liées respectivement
aux modes libres et aux modes de corps rigides.
-r- L XLF .
O.) I ' P-F
La conjugaison des équations (111.78 ), (111.79 ) et (111.80) donne l'équation spectrale de
base du modèle BMM
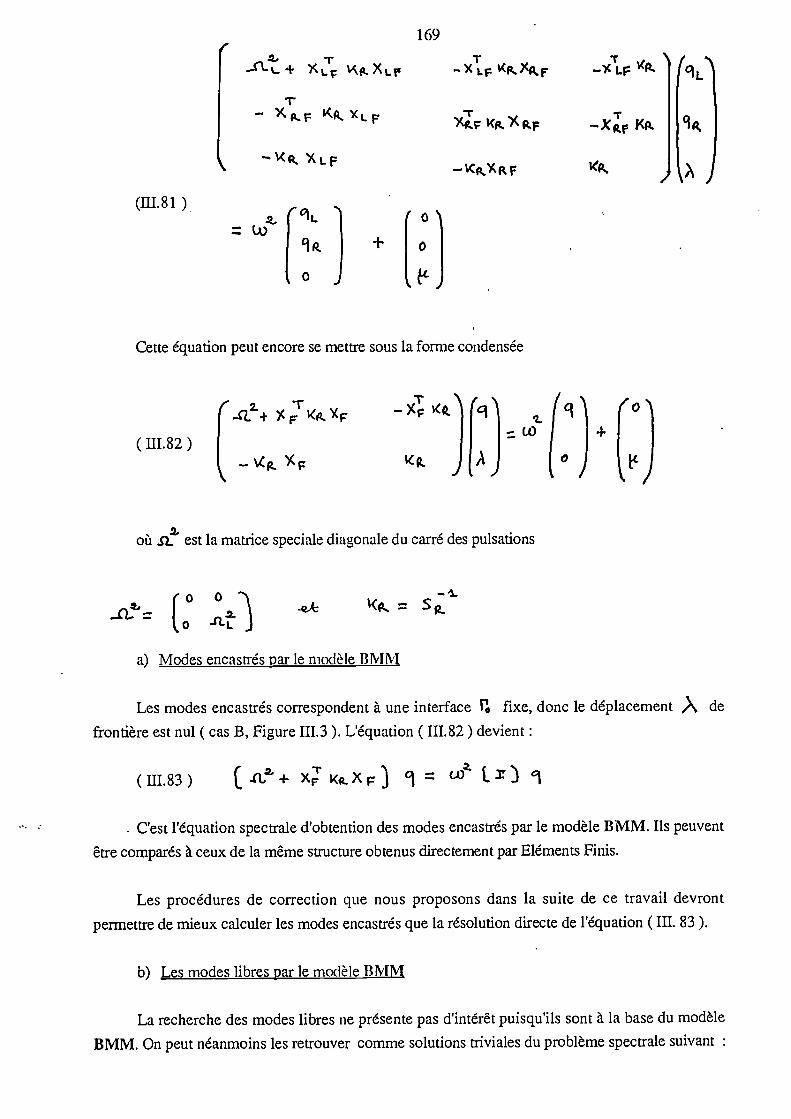
(ffl.81)
w
o
Cette équation peut encore se mettre sous la forme condensée
(o o
(.çi.2
O L
t.TL4 XLÇ XL
T- Xp KQ.xLF
R. XL
169
-CL2+
(111.82)
O
o
où est la matrice speciale diagonale du carré des pulsations
--i-= sp._
Modes encastrés par le modèle BMM
Les modes encastrés correspondent à une interface 1 fixe, donc le déplacement A de
frontière est nul (cas B, Figure 111.3). L'équation (111.82) devient:
(111.83) (L .(L'+ x KXF c; =
C'est l'équation spectrale d'obtention des modes encastrés par le modèle BMM. Ils peuvent
être comparés à ceux de la même structure obtenus directement par Eléments Finis.
Les procédures de correction que nous proposons dans la suite de ce travail devrontpermettre de mieux calculer les modes encastrés que la résolution directe de l'équation (III. 83).
Les modes libres par le modèle BMM
'
-r&ç
TXr, J<P
_x&Jf]tO'
11 (o)
1 J
La recherche des modes libres ne présente pas d'intérêt puisqu'ils Sont la base du modèle
BMM. On peut néanmoins les retrouver comme solutions triviales du problème spectrale Suivant
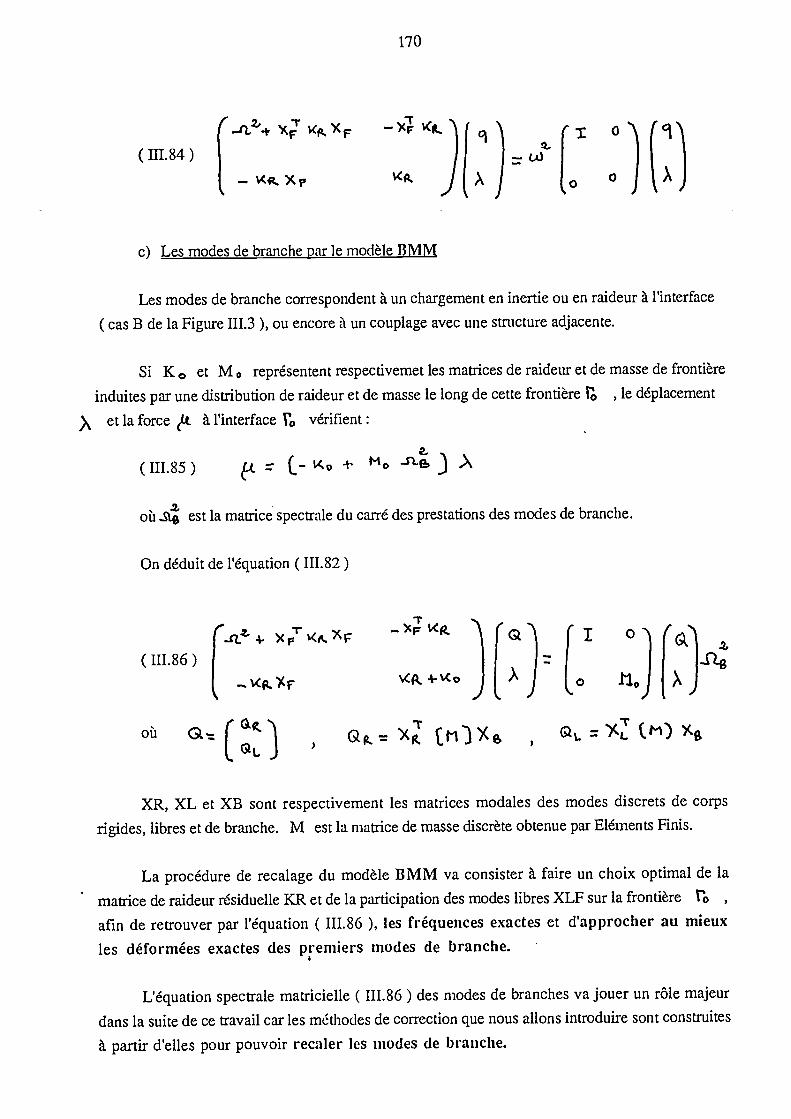
ß2'*(ffl.84)
- <'R. X?
c) Les modes de branche par le modèle BMM
Les modes de branche correspondent à un chargement en inertie ou en raideur à l'interface
(cas B de la Figure 111.3 ), ou encore à un couplage avec une structure adjacente.
Si et o représentent respectivemet les matrices de raideur et de masse de frontière
induites par une distribution de raideur et de masse le long de cette frontière t , le déplacement
et la force à l'interface r0 vérifient:
(111.85) + ti0
où 4 est la matrice spectrale du carré des prestations des modes de branche.
On déduit de l'équation (111.82)
où
170
_)((9.)[\ i o
1= J
À) lo O
1' o(I J
Lo fo) )
XR, XL et XB sont respectivement les matrices modales des modes discrets de corpsrigides, libres et de branche. M est la matrice de masse discrète obtenue par Eléments Finis.
La procédure de recalage du modèle BMM va consister à faire un choix optimal de la
matrice de raideur résiduelle KR et de la participation des modes libres XLF sur la frontière r0
afin de retrouver par l'équation (111.86 ), les fréquences exactes et d'approcher au mieux
les déformées exactes des premiers modes de branche.
L'équation spectrale matricielle (111.86) des modes de branches va jouer un rôle majeur
dans la suite de ce travail car les méthodes de correction que nous allons introduire sont construites
à partir d'elles pour pouvoir recaler les modes de branche.
(ict-4 )C'<.)F(111.86) JA
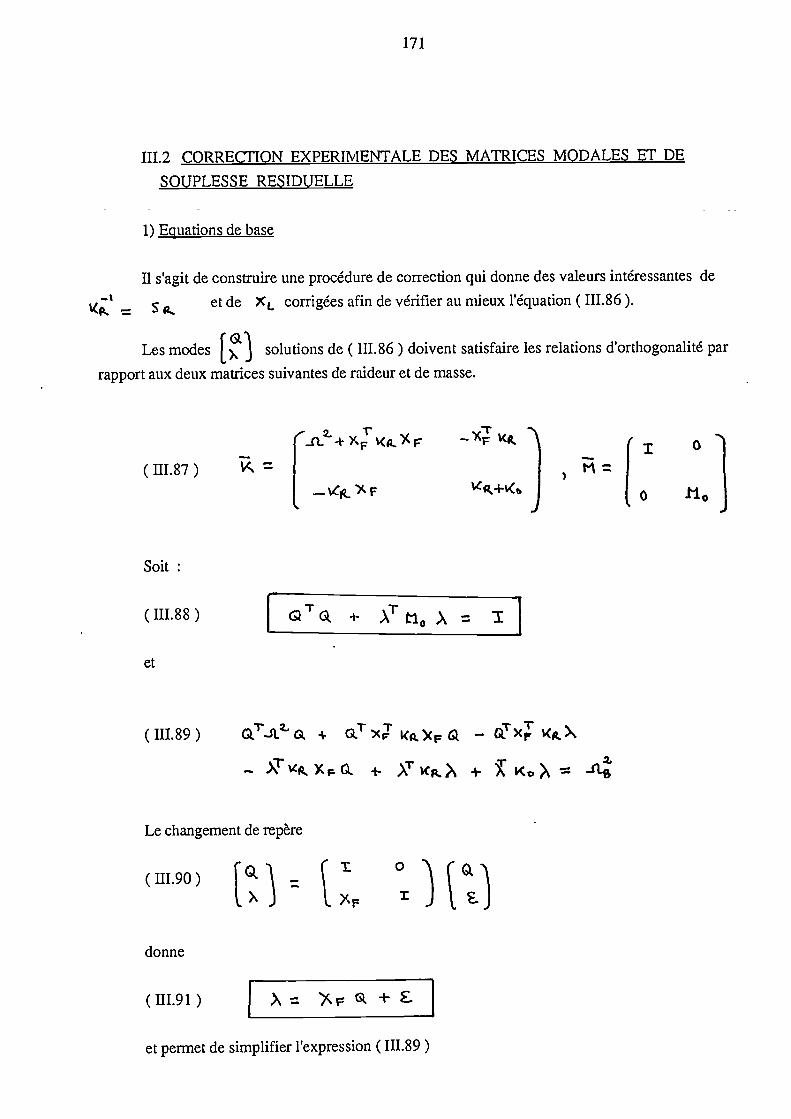
111.2 CORRECTION EXPERIMENTALE DES MATRICES MODALES ET DE
SOUPLESSE RESIDUELLE
1) Equations de base
II s'agit de construire une procédure de correction qui donne des valeurs intéressantes de
s et de XL corrigées afin de vérifier au mieux l'équation (111.86).
Les modes j solutions de (111.86) doivent satisfaire les relations d'orthogonahte par
rapport aux deux matrices suivantes de raideur et de masse.
(111.87)
Soit
(111.91)
171
1_(12_-t.
)Xç:
[
4
et permet de simplifier l'expression (111.89)
(111.88)
et
ATti), T
(111.89) + - Q?-)(;:
- + +
Le changement de repère
(111.90) ç'
donne
IJ\.
F (&
)
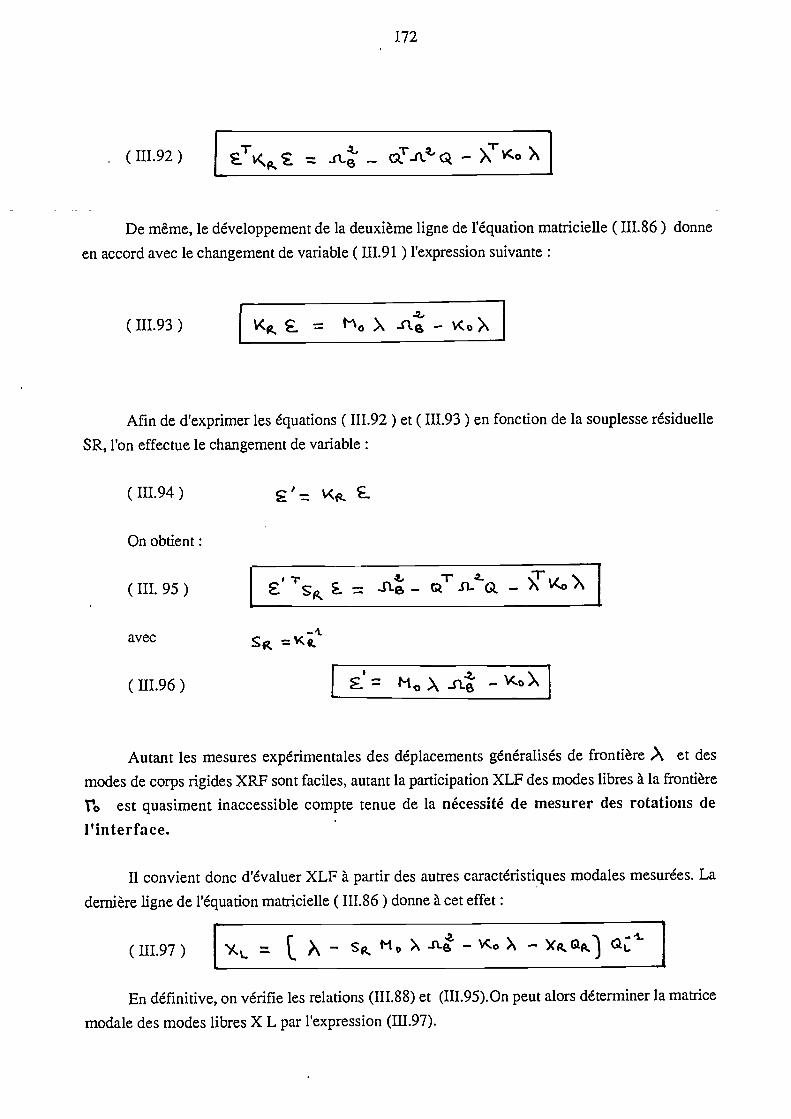
(111.92)
De même, le développement de la deuxième ligne de l'équation matricielle (111.86) donne
en accord avec le changement de variable (111.91) l'expression suivante:
(111.93)
Afin de d'exprimer les équations (111.92) et (111.93 ) en fonction de la souplesse résiduelle
SR, l'on effectue le changement de variable:
(111.94)
On obtient:
(III. 95)
avec
(111.96)
(111.97)
T T. 'K SL6 - c -. >. (o X
I
T"sp --e,-
L
172
2' M0)4'<.oX
Autant les mesures expérimentales des déplacements généralisés de frontière À et des
modes de corps rigides XRF sont faciles, autant la participation XLF des modes libres à la frontière
r0 est quasiment inaccessible compte tenue de la nécessité de mesurer des rotations de
l'interface.
Il convient donc d'évaluer XLF à partir des autres caractéristiques modales mesurées. La
dernière ligne de l'équation matricielle (111.86 ) donne à cet effet:
-R. t1D X 4 - > -
En définitive, on vérifie les relations (111.88) et (III.95).On peut alors déterminer la matrice
modale des modes libres X L par l'expression (111.97).
173
Le problème posé est ainsi résolu car cette nouvelle valeur de XL, donc la valeur corrigée
(équation (111.97 )), et l'expression corrigée de la souplesse résiduelle SR (équation (111.95)),
permettent de calculer successivement les modes de branche corrigés, équation (111.86 ), et les
modes encastrés corrigés, équation (111.83).
Intérêt de la correction du modèle BMM
A cause de la troncature modale, le modèle BMM perd de l'énergie cinétique. Leséquations principales ( 111.88 ), (111.95 ) et (111.96 ) ne sont pas vérifiées a priori.
Il n'est donc pas certain de retrouver exactement les modes de branche cherchés parl'équatioñ spectrale (111.86). C'est la preuve qu'apporteront les essais numériques ultérieurs.
Afin de remedier à cette difficulté, nous introduisons deux nouvelles procédures decorrection dont le premier critère de validité est le recala ge exact des modes de branche
(équation (111.86)).
Méthodes de correction TCM et SCM
Les sigles TCM et SCM sont définis comme suit:
TCM = Total Correction Method
SCM = Selective Correction Method
(ou Méthode de Correction Totale et Méthode de Correction Séléctive).
La procédure TCM corrige globalement une matrice alors que SCM n'opère qu'une
correction partielle comme son nom l'indique.
Il convient de signaler que le système formé par les équations (111.88 ), (111.91 ),(111.95 ) et (111.96 ) est rigoureusement équivalent à l'équation spectrale de définitiondes modes de branche (111.86) à laquelle on adjoint le changement de variable (111.91). Cette
équivalence est établie en ANNEXE 6.
En définitive, si les équations (111.88 ), ( 111.95 ), ( 111.96 ) sont vérifiéesprincipalement, et l'équation ( 111.97 ) par voie de conséquence, nous sommes certains de
retrouver les modes de branche exacts par l'équation spectrale de base (111.86).
174
C'est pourqoui nos deux méthodes de correction TCM et SCM sont basées essentiellement
sur ces 3 équations:
a) Etape i commune aux deux méthodes TCM et SCM
Cette étape concerne la correction des matrices modales Q et >.. . Il s'agit de réaliser la
relation d'orthogonalité par rapport à la matrice de massei, (111.88)
(111.98) t- À' 110 X 4*
On introduit les termes de correction . Q et t) pour obtenir l'égalité:
(111.100) f't'\ I'(XJ LO
La procédure de correction des modes envisagés au paragraphe 1.3 peut conduire à
l'obtention des valeurs . et X . Mais pour certains types de chargement à la frontière f
(par exemple les chargements en inertie), voir Figure 111.3, (cas B ), les modes de branche
calculés comportent des modes de corps rigides. Afin d'éviter l'influence de cette nouvelle famille
de modes de corps rigides, on cherche dans l'espace orthogonal à ceux-ci. Lesdéfinitions de QR et QL introduites dans l'équation (111.86) peuvent donc être conservées:
* ( 111.88 ) orthogonalité par rapport à la matrice de masse M*
( 111.95 ) orthogonalité par rapport à la matrice de raideur i*
( 111.96 ) 2è ligne de l'équation matricielle spectrale ( 111.83 )
(111.99))+ AX [I
o I
Nous appelions G Q.-t- AQ. et \AX les valeurs corrigées
cherchées. 11 faut donc réaliser:
o -
I
(III. 102)
où YR est une matrice à R colonnes.
* La matrice I a R lignes (à cause des R MCR)
* La matrice nulle D a N lignes si on a retenu N modes libres
* La matrice XRF a P lignes si l a P DDL de frontière.
La matrice YR a en définitive N+P+R lignes.
Soit YR l'expression dans la base de description (111.78 ) des modes de corps rigides issus
des modes de branche.
YR est une matrice à N+P+R lignes et R colonnes.
A l'équation ( 111.100 ) que doit vérifier la matrice {) s'ajoute la contrainted'orthogonalité
(111.103)
{
Q'o
-sII convient donc de disposer de l'expression exacte de la matrice YR.
175L
(I11.101a) Qp Xp, t M) X
et
(III.101b) Q.t.. XL XB
où XB est la matrice modale des modes de branche ( sans leurs modes de corps rigides au
cas où ils en auraient).Si la structure libre possède R modes de corps rigides XR, nous appelions YR la matrice de
ces modes rigides dans la base de description introduite en (111.78 ). YR s'exprime donc:
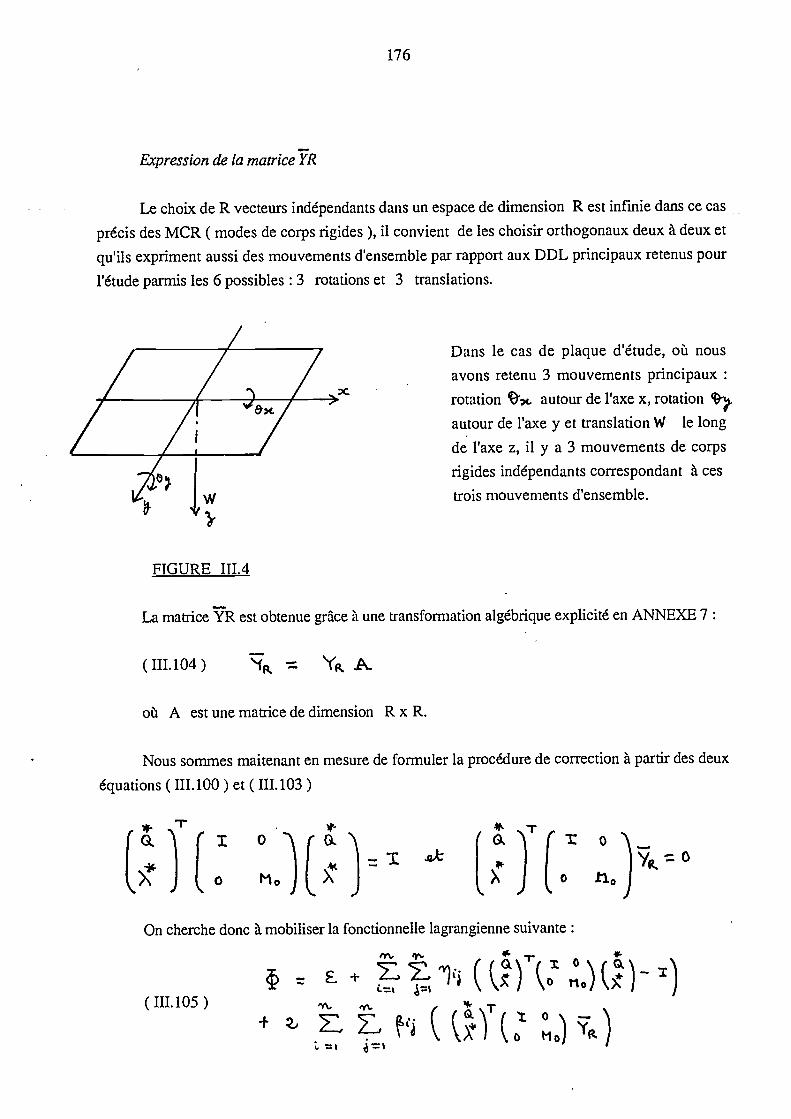
Expression de la matrice FR
Le choix de R vecteurs indépendants dans un espace de dimension R est infinie dans ce cas
précis des MCR (modes de corps rigides), il convient de les choisir orthogonaux deux à deux et
qu'ils expriment aussi des mouvements d'ensemble par rapport aux DDL principaux retenus pour
l'étude parmis les 6 possibles : 3 rotations et 3 translations.
FIGURE lIT.4
La matrice YR est obtenue grâce à une transformation algébrique explicité en ANNEXE 7:
(111.104) A.
où A est une matrice de dimension R x R.
Nous sommes maitenant en mesure de formuler la procédure de correction à partir des deux
équations (111.100) et (111.103)
[JOn cherche donc à mobiliser la fonctionnelle lagrangienne suivante:
T10E. ± ''1'ì ((3) (0 flo)
(111.105) ' 're. T -+ L Ç Ç>') ( ) ')
176
Dans le cas de plaque d'étude, où nousavons retenu 3 mouvements principaux
rotation autour de l'axe x, rotation
autour de l'axe y et translation W le long
de l'axe z, il y a 3 mouvements de corpsrigides indépendants correspondant à ces
trois mouvements d'ensemble.
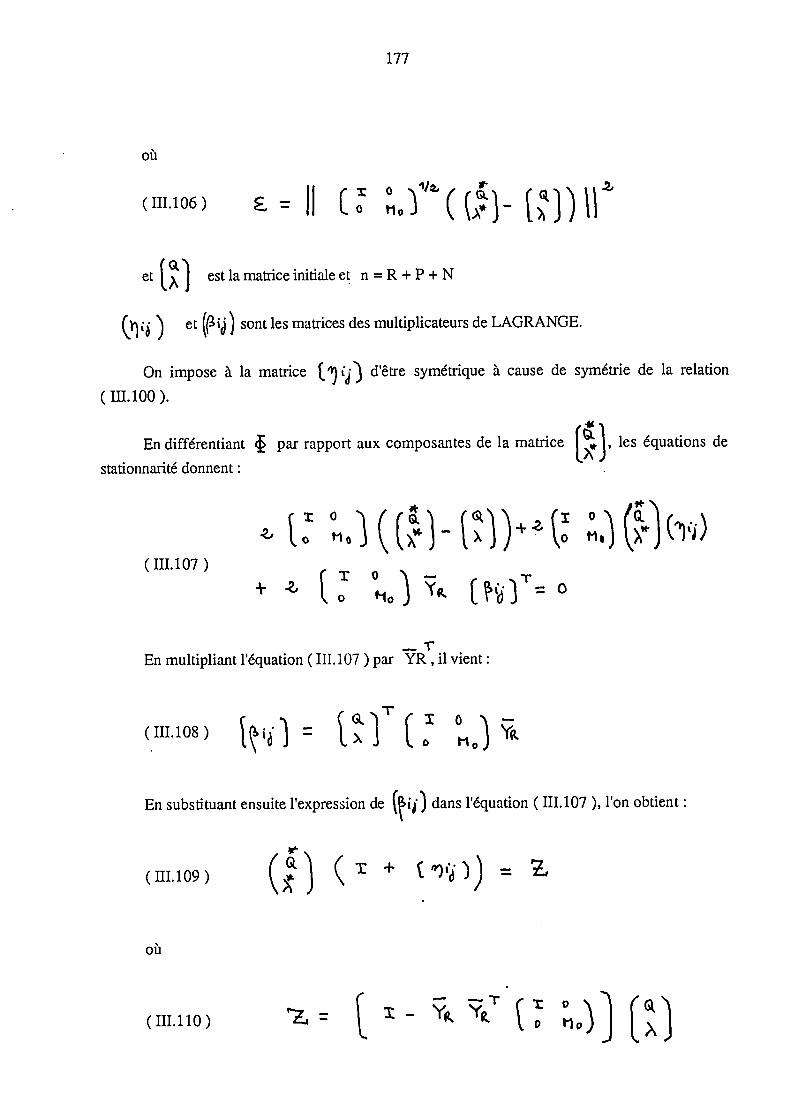
et estlamatriceinitialeet n=R+P+N
( ) et (( sont les matrices des multiplicateurs de LAGRANGE.
On impose à la matrice d'être symétrique à cause de symétrie de la relation
(111.100).
En différentiant t par rapport aux composantes de la matrice les équations de
stationnarité donnent:
, 'I.(I O \ ((Q;\
o h o j j ) 4s
((111.107)
(111.109)
où
E= JI
177
(111.110)
I O
CO hi (d- (fl)U
(T O \-b ioj '1p..
_1-En multipliant l'équation (111.107 ) par YR , il vient:
ç.
o
En substituant ensuite l'expression de dans l'équation (111.107 ), l'on obtient:
(t0
P «\ (Q.io)J lj\
(111.108 ) ifl 1 b o

En introduisant l'expression (111.109 ) dans l'équation (111.100 ), on détermine les
multiplicateurs de LAGRANGE
(111.111) (fì
1o.IL'égalité (111.109) induit alors la valeur de , soit:
(111.112)
L'algorithme suivant, testé dans nos essais numériques permet d'obtenir une convergence
très rapide au bout de quelques itérations.
('.) ,, °I
matrice d'initialisation.
b) Etape 2 . correction de la souplesse résiduelle de frontière SR - Méthode TCM
11 s'agit de corriger la souplesse SR par addition du terme correctif matriciel A SR afin
que la presqu'égalité:
(111.115) ' ./ft -cL' T-_ >Tt.0
devienne une égalité
(111.116)
178
r( I
(T(r I1O)
/E s.= -as
(111.113) X = X I I + 01X ))où
(o)(111.114)
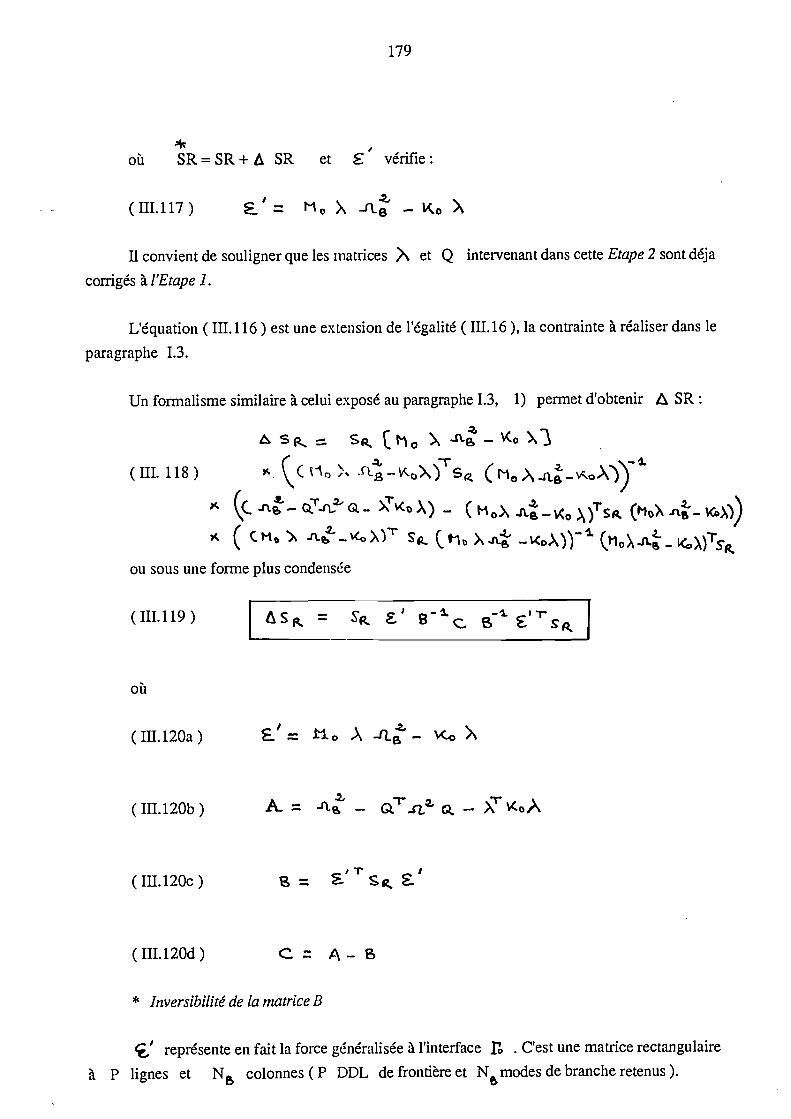
179
'iv
où SR = SR + t SR et vérifie:
(111.117) N0 X -fl t'c.o >,
II convient de souligner que les matrices \ et Q intervenant dans cette Etape 2 sont déja
corrigés à l'Etape 1.
L'équation (111.116) est une extension de l'égalité (111.16), la contrainte à réaliser dans le
paragraphe 1.3.
Un formalisme similaire à celui exposé au paragraphe 1.3, 1) permet d'obtenir L SR:
ASp Sh0\-í'--'(o\(III. 118) )c. 1e, >s
(.. $_ Q-flG- )?<) (M0> 4-< )TsA (i 4, (, ). _>)r (ti, x4 -<DA)
ou sous une forme plus condensée
(111.119) = :' 8tc:: &tEsp, I
où
(I11.120a) E'= I10 A >.
(I1I.120b) k = itt GçL2 >? (0A
'i'(I11.120c) = . SR 2
(11I.120d) C z A S
* Inversibilité de la matrice B
cj représente en fait la force généralisée à l'interface .I . C'est une matrice rectangulaire
à P lignes et NB colonnes (P DDL de frontière et Nmodes de branche retenus).
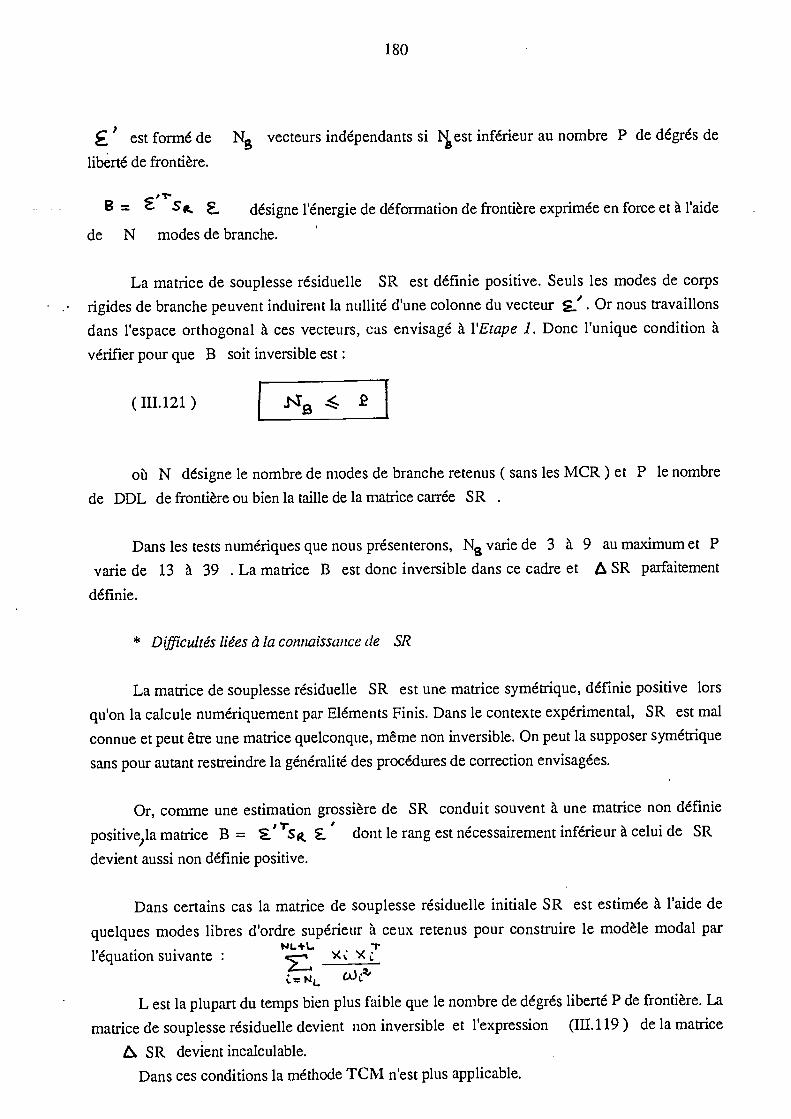
180
L' est formé de NB vecteurs indépendants si est inférieur au nombre P de dégrés de
liberté de frontière.
B = E. désigne l'énergie de déformation de frontière exprimée en force et à l'aide
de N modes de branche.
La matrice de souplesse résiduelle SR est définie positive. Seuls les modes de corps
rigides de branche peuvent induirent la nullité d'une colonne du vecteur e..'. Or nous travaillons
dans l'espace orthogonal à ces vecteurs, cas envisagé à l'Etape 1. Donc l'unique condition à
vérifier pour que B soit inversible est:
(111.121) 2
où N désigne le nombre de modes de branche retenus (sans les MCR) et P le nombre
de DDL de frontière ou bien la taille de la matrice carrée SR
Dans les tests numériques que nous présenterons, Nß varie de 3 à 9 au maximum et P
varie de 13 à 39 . La matrice B est donc inversible dans ce cadre et A SR parfaitement
définie.
* Dfflcu1tés liées à la connaissance de SR
La matrice de souplesse résiduelle SR est une matrice symétrique, définie positive lors
qu'on la calcule numériquement par Eléments Finis. Dans le contexte expérimental, SR est mal
connue et peut être une matrice quelconque, même non inversible. On peut la supposer symétrique
sans pour autant restreindre la généralité des procédures de correction envisagées.
Or, comme une estimation grossière de SR conduit souvent à une matrice non définie
positive,la matrice B = ' Sg. ' dont le rang est nécessairement inférieur à celui de SR
devient aussi non définie positive.
Dans certains cas la matrice de souplesse résiduelle initiale SR est estimée à l'aide de
quelques modes libres d'ordre supérieur à ceux retenus pour construire le modèle modal par
i équation suivante : ( (T
L est la plupart du temps bien plus faible que le nombre de dégrés liberté P de frontière. La
matrice de souplesse résiduelle devient non inversible et l'expression (111.119) de la matrice
t SR devient incalculable.Dans ces conditions la méthode TCM n'est plus applicable.
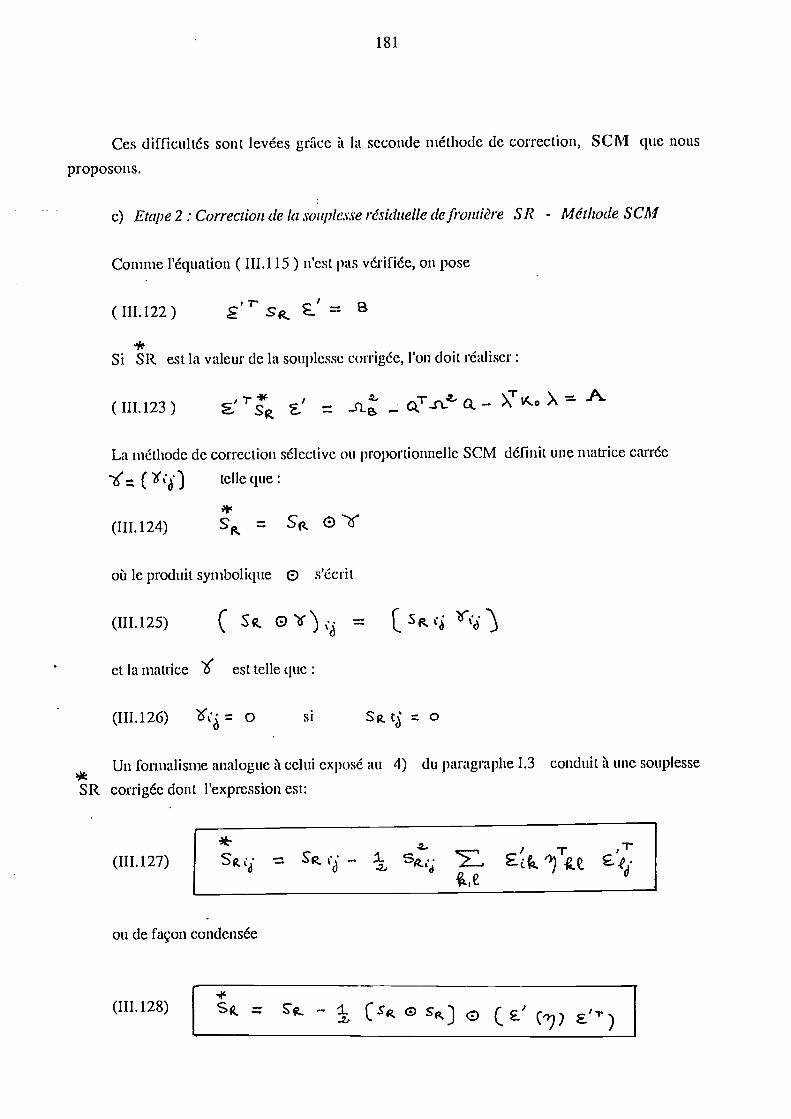
Ces difficultés sont levées gruice à la seconde méthode de correction, SCM que nous
proposons.
e) Etape 2 C'orreciion de la souplesse résiduelle defro,uière SR - Méthode SCM
Comme l'équation (111.115 ) n'est pas vérifiée, on pose
(111.122) 'sg. '
Si SR est la valeur de la souplesse corrigée, l'oii doit réaliser
(111.123)
(111.127)
ou de façon condensée
(111.128)
181
La méthode de correction sélective ou l)Ioportiomlmlelle SCM définit une matrice carrée
(f) telleque:
(111.124) s= S®Thoù le produit symbolique ® s'écrit
(111.125) ç S g G [s c; 'ò
et la matrice ' est telle que
(111.126) O si Sg. tÇ o
Un fornmlisme analogue à celui exposé au 4) du paragraphe 1.3 conduit à une souplesse
SR corrigée dont l'expression est:
-f-S9, SR - e;;.
Çz.
,Td
Sg -;
(sg. !) S) (Z) (E C.);)) &)
est la matrice des multiplicateurs ile LAGRANGE solutions d'une équation analogue à
l'équation (111.59)
(111.129) , -z,
182
et C est un tenseur d'ordre 4 délini par
(111.130)L
Qn vérifie sans difficulté la symétrie du tenseur C.
4En représentant C par une matrice carrée x N9, la matrice ) par un vecteur
unicolonne à N9 composantes et la matrice 2 B - A) par un vecteur unicolonne à Ncomposantes , l'équation (111.129) peut se mettre sous la forme
(111.131) CX=Y
où les vecteurs X et Y (unicolonnes, N'composantes) représentent respectivement les
matrices ('q) et 2 [B - A)
La détermination (le X , donc (IC induit l'inve,vion de la matrice C.
Le rang de la matrice C dépend de la structure et des contraintes liéees à l'équation
(111.45) . On peut remarquer d'après l'équation (111.127) que les coefficients nuls de SR
demeurent nuls après la correction . I)'autre part, le rang de la matrice C, en accord avec laprocédure envisagée en ( R 21), est inférieur au nombre de coefficients non nuls de la matrice SR.
Lors que la matrice SR est diagonale, il a au maximum P coefficients non nuls, où P
désigne le nombre de DDL de frontière. La matrice C est carrée Nßx Noù est le
nombre de modes de branche retenus pour la correction. La procédure SCM ne pourra donc
s'appliquer aux matrices SR diagonales que si:
(111.132) P>N
La plupart du temps cette condition n'est pas réalisée dans la pratique comme nous le
verrons dans les tests numériques. Il convient alors d'envisager la méthode 'I'CM pour la
correction de ces matrices SR diagonales.
183
Par contre la méthode SCM ne nécessite I)ilS l'inversibilité de la matrice SR à l'opposé de la
méthode TCM.
Etape 3 correction finale (les modes libres XLF
Après les correCtiOI)S des deux Etapes i et 2, on peut calculer une nouvelle matrice XLP
des participations des modes libres sur la frontière grâce à l'équation (111.93 ) où on intègre les
valeurs corrigées de SR , Q et ).,
*(111.133) s r0 - L
*Les valeurs corrigées SR , XLP et X , et par voie de conséquence KR = SR sont
enfin introduite après cette étape ultime successivement dans l'équation (111.86 ) pour obtenir les
modes de branche corrigées (les fréquences et les formes ), puis dans l'équation (111.83 ), pour
avoir les fréquences et les formes des modes encastrés aim de tester l'efficacité du modèle.
co,ervaiioii dit caractère d4fmni posit if de la souplesse résiduelle corrigée SR
Dans le cas où la souplesse résiduelle de frontière SR est définie positive, il n'est pascertain que sa valeur corrigée SR le soit aussi. La correction des caractéristiques de frontière est
en effet dangereuse car on peut y perdre facilement le caractère défini positif initial de SR
L'intérêt des méthodes de colTection proposées, TCM et SCM ,réside dans le fait qu'on
définit un guide parl'introduction des modes de branche qui permettent de garder ce caractère dans
la très grande majorité des tests effectués, on a cfectivement constaté cette propriété intéressante.
Si le caractère se perd, il est toujours possible de le sauvegarder en rajoutant des mudes de
branche liclifs correspondant à un calcul direct avec SR non corrigée. Les modes de branche
fictifs sont par exemple les modes de brandie non corrigés, de rang supérieur à ceux retenus pour
réaliser la correction. Ces modes de branche fictifs sont introduits seulement aux étapes i et 2, sous
la seule condition que le nombre total de modes de branche n'excède pas P , nombre de DDL
de frontière comme l'indique l'inéquation (111.121).
184
f,) Organigranune de correction du modèle 13MM
Obtenton des nmtrices de masse (M) et de raideur( K) par Eléments Finis
Calcul des NL preuhiers modes libres XL et des NB 1)relniers modes de branche
XB par Eléments Finis.
Calcul de la souplesse résiduelle (le frontière SR
Calcul des matrices modales QR et QL
" *Correction des participations modales QR , QL et
Correction de la matrice de souplesse résiduelle SR
Calcul de la nouvelle matrice modale XLP à partir des valeurs corrigées
Calcul des modes de branche exacts (recalage) grâce aux valeurs corrigées (KR et
XLF ) par l'équation (111.86 )
*Calcul des modes encastrés corrigés grâce aux valeurs corrigées KR et XLF par
l'équation (111.83 )
IiI-3 CADRE D'UTILISA'I'ION DU MODELE 11MM
A- LES DEFINITIONS
1) Définition du modèle modal Bl\IM
Le modèle modal BMM est construit sur la base de R modes de corps rigides, NLmodes libres et P coordonnées généralisées (le frontière au maximum. On en déduit donc
(Dl) LN + NL + L
où n est le nombre de dégrés de liberté ( DDL) du système total et P le nombre de DDL
de frontière à corriger.
2) Définition de la souplesse résiduelle SR de frontière
(1)
où S est la souplesse statique ou pseudo-statique si la structure comporte des modes de
corps rigides. SR est définie dans un espace de dimension n - NL , donc sa taille P doit
vérifier
B) STRATEGIE DE CORRECTION
On doit corriger P DDL de frontière à l'aide de NL modes libres, NL « P afin
d'améliorer les caractéristiques dyn amici ucs (le l'assemblage.
L'ensemble des solutions est a pdoi i quelconque. On élabore une stratégie de correction (lui
consiste à retrouver les caractéristiques exactes (les modes de branche à partir de la valeur de SR
corrrigée. Cette contrainte supplémentait e est de nature it flOUS rapprocher des caractéristiques des
modes de la structure finale recherchée.
C. LA CORRECTION
La matrice de souplesse résiduelle SR de frontière est symétrique et définie positive
lorsqu'elle résulte du calcul analytique (I) où l'on a respecté les conditions (I)!) et (D2).
Mais dans le contexte expérimental, SR est assez nial connue et peut être une matrice quelconque.
Sans pour autant limiteer la généralité (les méthodes introduites, TCM et SCM, nousconsidérons SR symétrique dans toute la suite de cette analyse des conditions d'utilisation du
modèle BMM.Il convient en effet de spécifier les conditions fortes (c'est à dire nécessaires ou biemi
suffisantes) et les conditions faibles (c'est à dire liées des cas particuliers de matrice SR ou à
l'expérience) qui interviennent chaque étape de la correction.
Les conditions fortes sont d'ordre mathématique OU physique. Elles sont notées par la lettre
D suivie d'un numéro en indice (Di).
185
(D2) 1ML
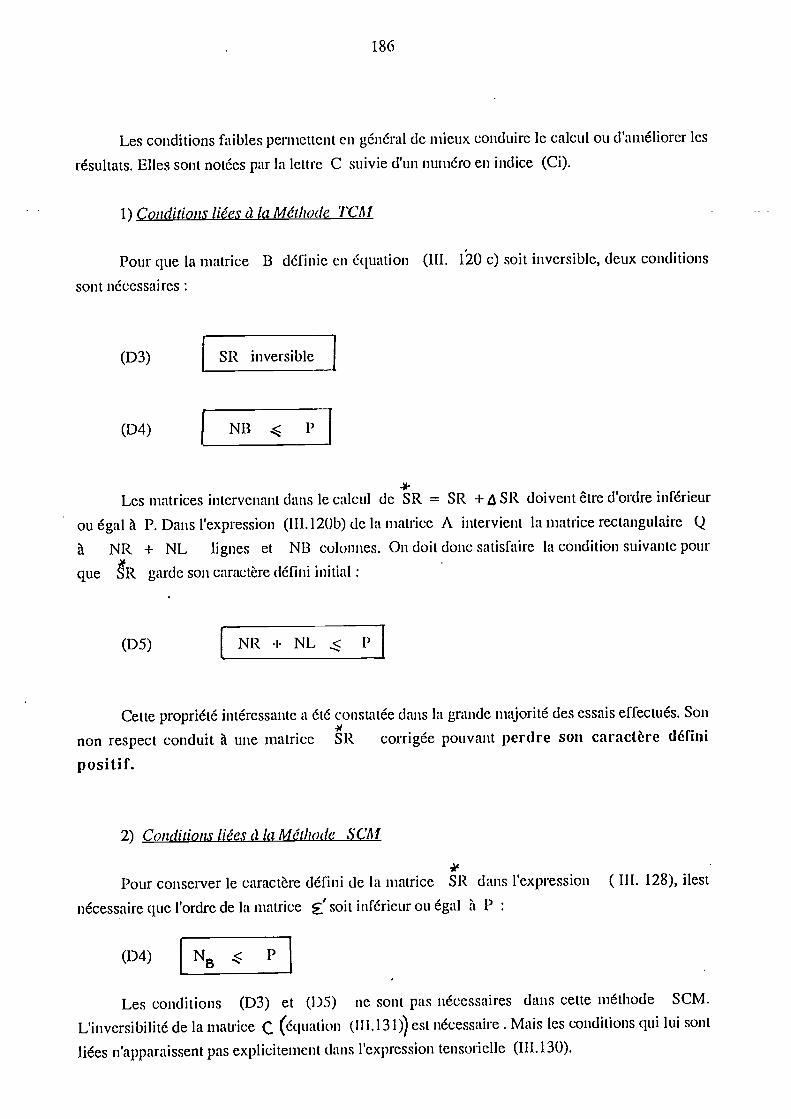
¡NB . P
.11-
Les matrices intervenant dans le calcul de SR = SR + SR doivent être d'ordre inférieur
ou égal à 1'. Dans l'expression (III. 1 20b) de la matrice A intervient la matrice rectangulaire Q
à NR + NL lignes et NB colonnes. On doit donc satisfaire la condition suivante pour
que R garde son caractère défini initial
NR + NL . P
Cette propriété intéressante a été constatée dans la grande majorité des essais effectués. Son
non respect conduit à une matrice SR corrigée pouvant perdre son caractère défini
positif.
2) Conditions liées à la Méthode SCM
Pour conserver le caractère défini (le la matrice SR dans l'expression (III. 128), ilest
nécessaire que l'ordre de la matrice ' soit inférieur ou égal à P
(D4) N5 P
Les conditions (D3) et (1)5) ne sont pas nécessaires dans cette méthode SCM.
L'inversibilité de la matrice c équation (111.131)) est nécessaire . Mais les conditions qui lui sont
liées n'apparaissent pas explicitement dans l'expression tensorielle (111.130).
186
Les conditions faibles permettent en général de mieux conduire le calcul ou d'améliorer les
résultats. Elles sont notées par la lettre C suivie d'un numéro en indice (Ci).
1) Conditions liées û la Méthode TCM
Pour que la matrice B définie en équation (III. l'20 c) soit inversible, deux conditions
sont nécessaires
(D3) SR inversible
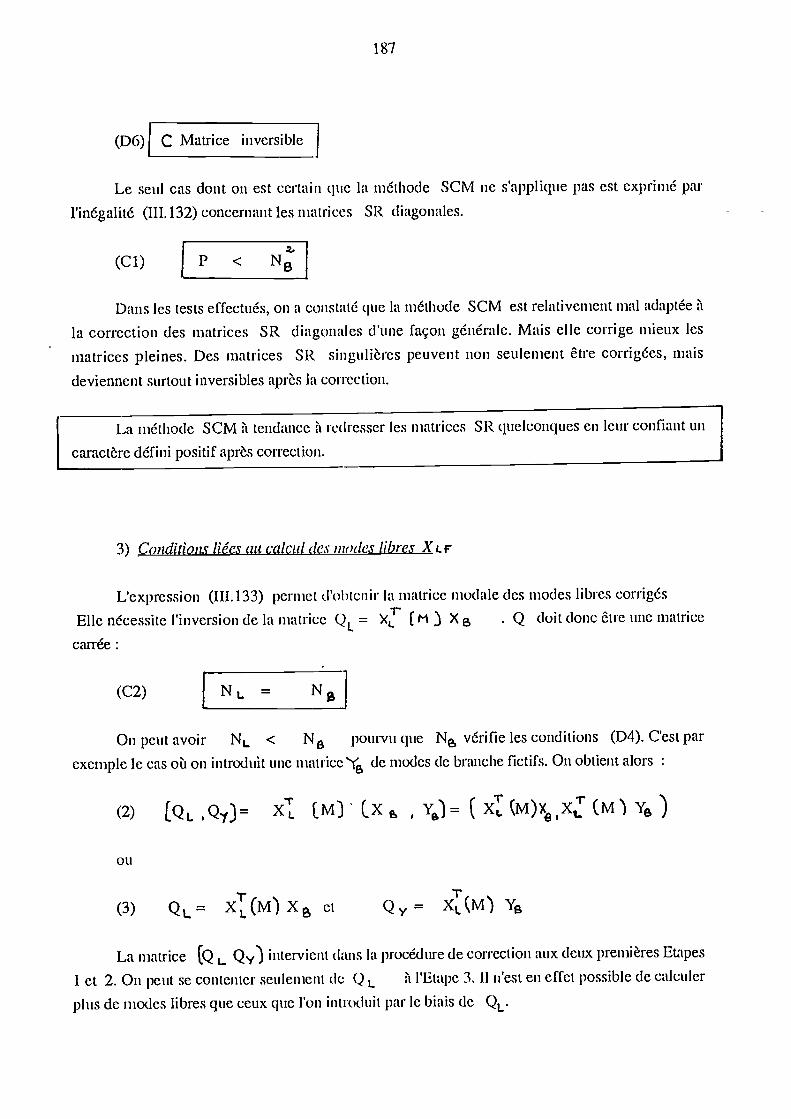
(D6) ( C Matrice inversiblej
Le seul cas dont on est certain que la méthode SCM ne s'applique pas est exprimé par
l'inégalité (111.132) concernant les matrices SR diagonales.
(Cl) P < NB
Dans les tests effectués, on a constaté que la méthode SCM est relativement mal adaptée à
la correction des matrices SR diagonales d'une façon générale. Mais elle corrige mieux lesmatrices pleines. Des matrices SR singulières peuvent noii seulement être corrigées, mais
deviennent surtout inversibles après la correction.
187
La méthode SCM à tendance à redresser les matrices SR quelconques en leur confiant un
caractère défini positif après correction.
3) Conditions liées au calcul (les iiiodes libres Xi.
L'expression (111.133) permet d'ol)tenir la matrice modale des modes libres corrigés
Elle nécessite l'inversion de la matrice = M X B Q doit donc être une matrice
canée:
(C2)
On petit avoir NL < N8 pourvu que N vérifie les conditions (D4). C'est par
exemple le cas où on introduit une matrices de modes de branche fictifs. On obtient alors
LQL Qy)= X 1M' (x , (x ÇM)XX (M
ou
QL= xL(Ms)xß et Q= XÇM') Y
La matrice Q L Qy intervient dans la procédure de correction aux deux premières Etapes
i et 2. On peut se contenter seulement de Q L l'Etape 3. 11 n'est en effet possible de calculer
plus de modes libres que ceux que l'on introduit par le biais (le
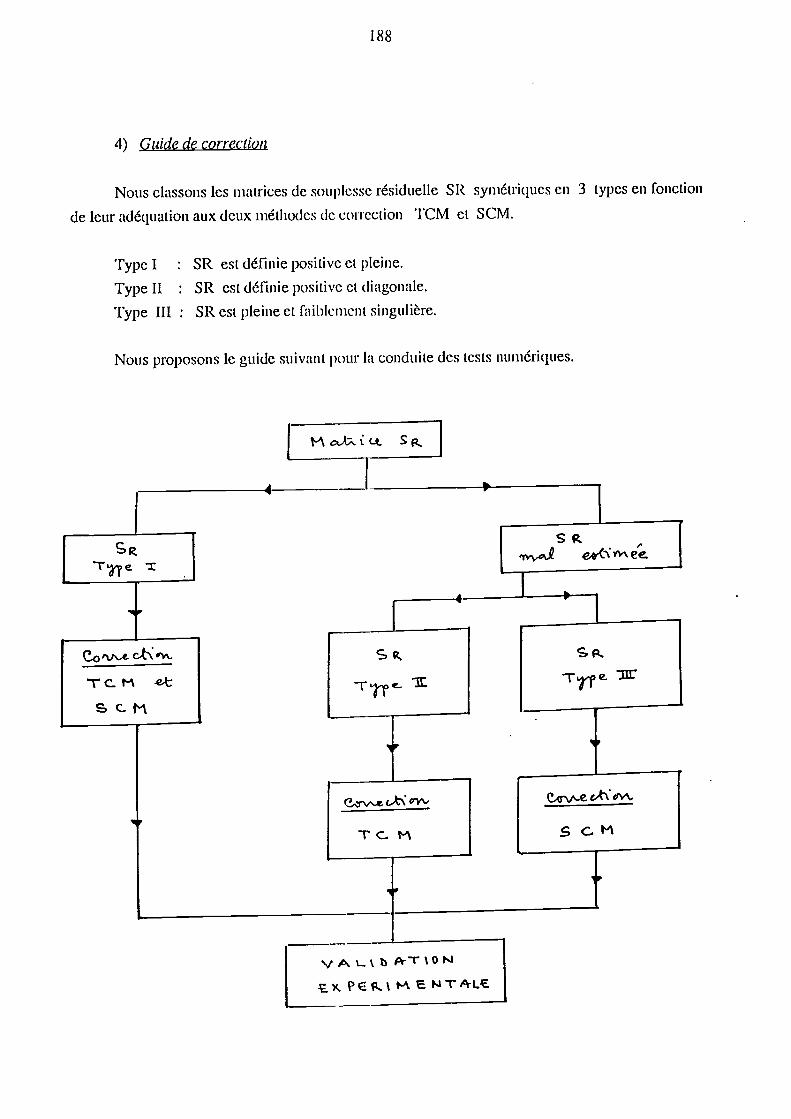
4) Guide de correction
Nous classons les matrices de souplesse résiduelle SR SYn1étri(1UCS en 3 types en fonction
de leur adéquation aux deux méthodes dc correction TCM et SCM.
Type I : SR est définie positive et pleine.
Type JI : SR est définie positiVe et diagonale.
Type III : SR est pleine et faiblement singulière.
Nous proposons le guide suivant pour la conduite des tests numériques.
TCM .e-k
188
V A Lt b A--r t O N
ç. PE..t t- NTA-LE
SRe,('e.
SCM
D. TESTS NUMERIQUES
Dl - Analyse qualitative
Plusieurs types d'essais ont été effectués pour valider les deux méthodes de correction
TCM et SCM introduites.Il a été d'abord nécessaire de s'assurer du parfait recalage des modes de branche
corrigés. C'est le premier critère permettant de vérifier le bon fonctionnement du modèle modal
BMM et des nouvelles procédures de correction TCM et SCM construites. Ce recalage a
porté sur 3 caractéristiques dynamiques majeures : les fréquences, les déformées
modales et les réponses temporelles sous diverses excitations.
L'adéquation entre les caractéristiques issues du modèle BMM corrigé et les valeurs exactes
M.E.F. (fournies par la Méthode des Eléinents Finis) a chaque fois été attestée. De nombreux
exemples ont mis en évidence l'efficacité des procédures de correction utilisées.
Ces essais portant sur le recalage des modes de branche qui est à la base desprocédures de correction utilisées pour améliorer le modèle modal de base BMM tiennent lieu de
première preuve de la qualité des méthodes. L'on obtient des modes de branche exacts par le
modèle modal corrigé.
L'on a ensuite envisagé d'autres essais pour attester des modèles modaux ainsi obtenuslorsqu'on impose des modifications structurales majeures comme des variations de conditions aux
limites ou des raccordements avec d'autres sous-structures.
On a pu alors déterminer les premiers modes encastrés de nouvelles structures obtenues par
ces modifications structurales, les modes de structures assemblées, et ceux de structures munies
d'organes élastiques tels que des joints aux interfaces de raccordement.
A chaque fois, la double efficacité du modèle modal BMM et des méthodes de correction
TCM et SCM a été mise en évidence en comparant les fréquences des modes descorrigés et non corrigés à celles issues du calcul des Eléments Finis que nousconsidérons comme des valeurs exactes (par opposition aux valeurs approchées provenant de la
synthèse modale).
189
D2 . Qualité de la correction et efficacité du modèle BMM
1) L'exemple dc base
FIGURE III 3
A partir des modes libres de la l)11(lue d'acier de référence finement maillée (voir FIGURE
I ) en 135 DDL, on essaie de déterminer ses modes encastrés cii 5 points (Ml, M2, M4,
M5 ).Les modes de branche sont obtenus pal- deux chargements successifs en masse et en raideur
Ien ces 5 points.
Soient M, I x et I y la masse totale, le moment (l'inertie pair rapport à l'axe x et le
moment d'inertie par rap)ort à l'axe y respectivement de la plaque d'acier. On répartit fl ,
et équitablement cii ces 5 PoiiitS M, Ç (i., s) . La matrice de chargement cii inertie en
Mk s'écrit donc
(2) Mok =
190
t
t4
o o
o
5o
-
où cette matrice 3x3 est en rapport avec les DDL en un noeud des Eléments Finis intriduits
au chapitre 1, à savoir translation suivant , rotation suivant x et rotation suivant y.
Un assemblage élémentaire pcimet (l'obtenir la matrice de chargenient en inertie en ces 5
points Mk soit M cette matrice . Elle intervient dans l'équation (111.86) où la matrice
est donc nulle.
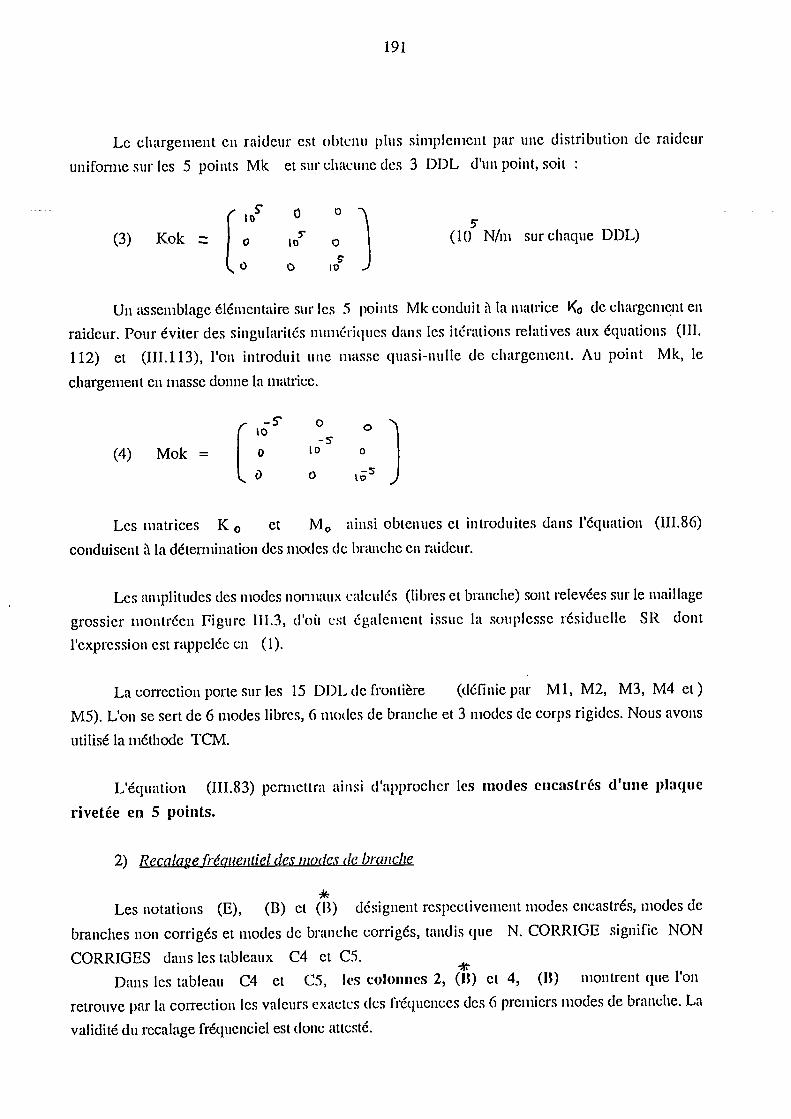
191
Le chargement en raideur est obtenu PiLls simplement par une distribution de raideur
uniforme sur les 5 points Mk et sur chacune des 3 DDL d'un point, soit
-s.r
(3) Kok z o
Lo
'D
5.(10 N/rn sur chaque DDL)
Un assemblage élémentaire sur les 5 points Mk conduit à la matrice K0 de chargement en
raideur. Pour éviter des singularités numériques dans les itérations relatives aux équations (III.
112) et (111.113), l'on introduit une niasse quasi-nulle de chargement. Au point Mk, le
chargement en masse donne la matrice.
I__SS o of (O
(4) Mok= Io lo o
L o -to
Les matrices K et M0 ainsi obtenues et introduites dans l'équation (111.86)
conduisent la détermination des modes de branche en raideur.
Les amplitudes (les modes normaux calculés (libres et branche) sont relevées sur le maillage
grossier montréen Figure 111.3, d'où est également iSSue la souplesse résiduelle SR dontl'expression est rappelée en (1).
La correction porte sur les 15 DI)L (le frontière (définie par Ml, M2, M3, M4 et)M5). L'on se sert de 6 modes libres, 6 modes de branche et 3 modes de corps rigides. Nous avons
utilisé la méthode TCM.
L'équation (111.83) permettra ainsi d'approcher les modes encastrés d'une Pla(IUe
rivetée en 5 points.
2) Recalagefréquentiel des modes de branche
Les notations (E), (13) et (13) désignent respectivement modes encastrés, modes de
branches non corrigés et modes de branche corrigés, tandis que N. CORRIGE signifie NON
CORRIGES dans les tableaux C4 et CS.Dans les tableau C4 et CS, les colonnes 2, (II) et 4, (II) montrent que l'on
retrouve par la correction les valeurs exactes (les fréquences des 6 premiers modes de branche. La
validité du recalage fréquenciel est donc attesté.
D
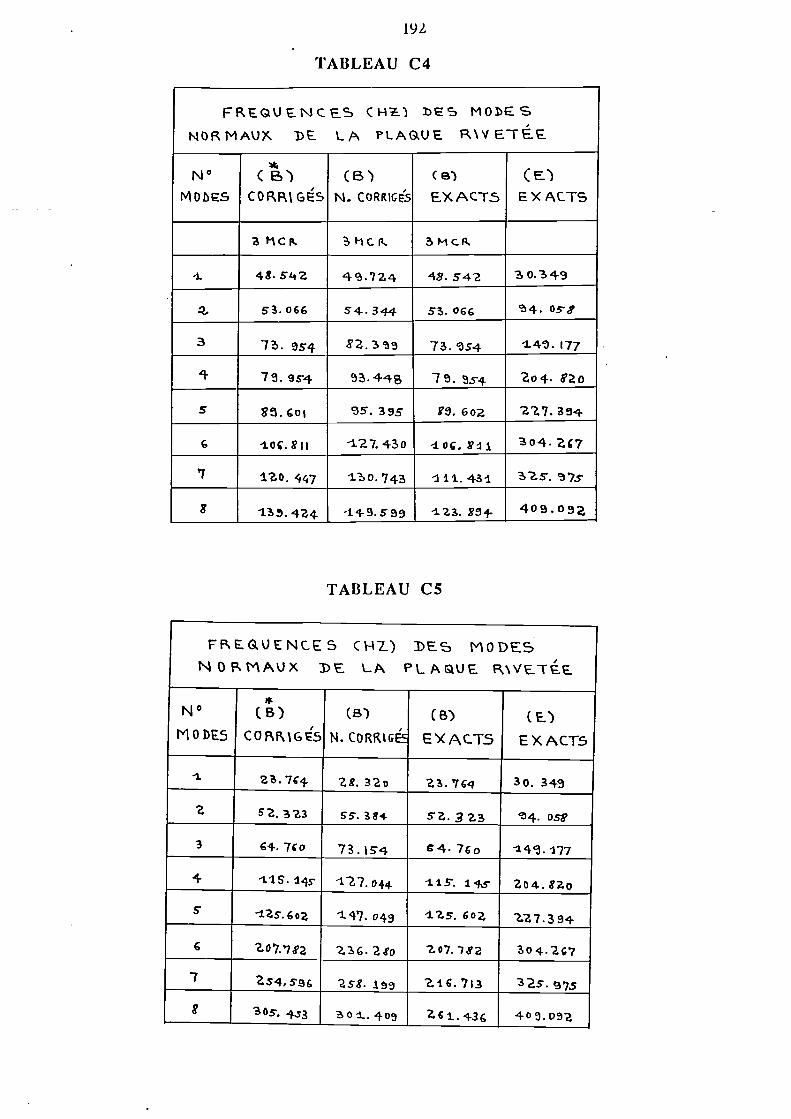
192
TABLEAU C4
TABLEAU CS
FREUNCES (H IES MOISNORMAU) 1 A T'I.AG(JE R\VETE.
N°MObES
(B)CORRIGS
(6')N CoRRIG's
(a)EXACT3
(E)EXACTS
3Plcp. 3hcr'..
1. 48.S'Z 4.7Z4 48.542 2,0.349
3.0G 54-.344 4 0
3 73. 954 82.3 14. 177
3.44 79.gq. Zo4.6'?.o
S S9.Col 95.395 V.6o2 227.3q.
-127.430 4OÇ 304. C7
'T 1.20. 447 1.0.'743 -i-11.431 32s. 9'7$
g 4Z4 -j49g9 -i2.3.S+ 409.o
FREO.UENCES (HZ.) DE MODESNORMAUX 3E LP PLAGUE RS\VETE
N°MODE5
*(B)
COG5(8)
N.CoRIUG5
(8)EXACTS
(E')EXACT5
-t Z.7C4 g 30. 349
Z S2 23 s 381- 52.. 3 '2.3 94. 0.%'
3 G4.7o 73.4 4.7o 1.4'771- -t15.i4- 127.044 I.I.g. 1
1.ZS.GoZ t4'7.049 1.25.602 227.391.
G %O7.'7g 207. 1.'2 304.2G7
'T ZS4,5 'gg.j 3S.75g 3054$3 30i..4o9 ZGt.13G 4°.DS
La comparaison des colonnes 3, (B) et 4, (B) montre au contraire l'écart entre les
valeurs non corrigées et les valeurs exactes (les fréquences des modes de branche. Cet écart
fréquenciel varie de 10 à 20 II (en passant du 3e au 6e mode) P0L1t le chargement en masse
(tableau C4), et de 10 à 30 II(en passant du 3e au 6e mode) pour le chargement en raideur
(tableau C5).
Enfin, avec 6 modes de branche en mase l'on COUVIC un domaine fréquenciel inférieur à 110
F1. Cette plage correspond celle des 2 premiers modes encastrés de la plaque rivetée. L'on petit
s'attendre à corriger les 2 1)re1niè'es fréquences de ces modes encastrés, et au mieux les 3
premières.
De même, les 6 premiers modes de branche en raideur couvrent un domaine fréquentiel
inférieur à 210 HZ , ce qui correspond la plage des 4 preniièress frécjuences des modes
encastrés de la plaque rivetée. On peut s'attendre les calculer.
Les résultats qui figurent dans les tableaux C6 (chargement en raideur) sur l'étude des
modes encastrés de la ¡)laque rivetée confirment ces prévisions dans la suite de cette
analyse.
3) 1?époses temporelles des modes dc branche
-i.
FIGURE 111.4
L'on reconsidère la plaque de la Figure 111.3, avec son chargment en raideur initial. On
applique une force variable F(t) au noeud i dans la direction de afin de pouvoir comparer la
réponse temporelle obtenue en ce point par la synthèse (corrigée et non corrigée), Equation
(111.86), et par les Eléments Finis dont l'équation temporelle s'écrit
Pl,
193
t1. ti:;-
'o
(.=. tt
FIGURE III. 5
La même propriété observée en a) a encore été vérifiée. (voir Graphe I et $7 ).
Donc ii l'aide de 6 modes libres, le modèle modal 13MM fournit une réponse temporelle
identique à la courbe exacte calculée par un maillage fin Eléments Finis. BMM non corrigé donne
des courbes (lui sont différentes des courbes réelles.
194
(M)?c + ('.)xoù (M) et (K) sont les matrices de masse et de rigidité obtenues par Eléments Finis de la
plaque cchangée en raideur en 5 points stir le maillage fin.
(M) et (K) sont des matrices cariées 135x135.
Les équations de syii thèse moda le (111.86) et (111.87) indu isent l'équation dynamique
suivante dans ce cas particulier.
¿j (.+) .. I,Ç 9 (-f) = F CUt)
où X est la matrice modale des 3 modes de corps rigides et des 6 modes libres.
et sont des matrices camiées 24x24.
L'intégration temporelle de ces 2 équation (5) et (6) est faite avec la méthode de
NEWMAR K (Avec des valeurs des paramètres la rendant inconditionnellement stable).
On a d'abord appliqué une force sinusoïdale F = 100 sin (180 t) où
a.,, < &o , (c&.' étant la pulsation de rang i des modes de branche). Sur un
temps d'observation de 400 millisccondes, soit environ 10 fois la période fondamentale, les
Eléments Finis et le modèle 13M M corrigé donnent des réponses temporelles identiques (voir
Graphe G $5 ). BMM non corrigé donne une réponse loin de la réalité.
On a ensuite appliqué successivement une force échelon de 100 et 1000 N pendant
respectivement un 10O et un 1000e de seconde.
F ,.,
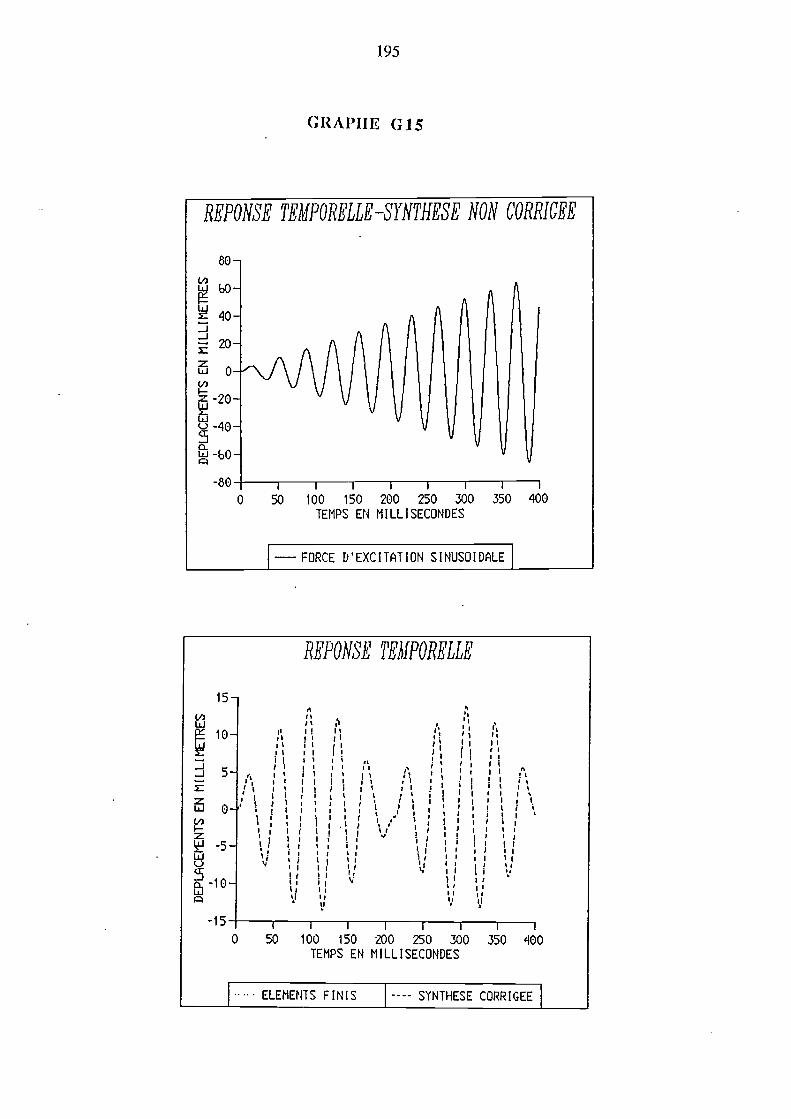
195
(;RAPHE GiS
REPONSE TEMPORELLE-S YNTHESE NON CORRIGEE
I
-80 i I i
0 50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
FORCE DEXC!TATION SINUSO!DLE
RJ?PONSJ? TE.4ÍPORFLLE
-15 i I i
0 50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
15-
C')wo-
lt
iI Ii! tli i
i
t ii ii
i,; ; i't
,'lH it
i I it'i il__j 5- f,it I tit I
I tII It i"II t i t I I
t II 'I'i'; I' I I I' tI i Ii 1%
o-I I' i i
i I
i I I I i i i t I
itIi
ii¡ I t i
I I i Ii ii tj
i I,
(1)I-z-5--
i.LJÇ)
- .-e
io
ii' t I I I
i
i Ii I 1.11
i i Ij
i i I t ii' II t1 I
I: t, ii itI II Ii 'I
1 1
tu ii tiIi Itt.!
ti
I,Iii
t
I i ii I III,
I I j iIII II ilII i
t j 'iII I,ti IIii tii,.
ELEMENTS FINIS SYNTHESE CORRIGEE
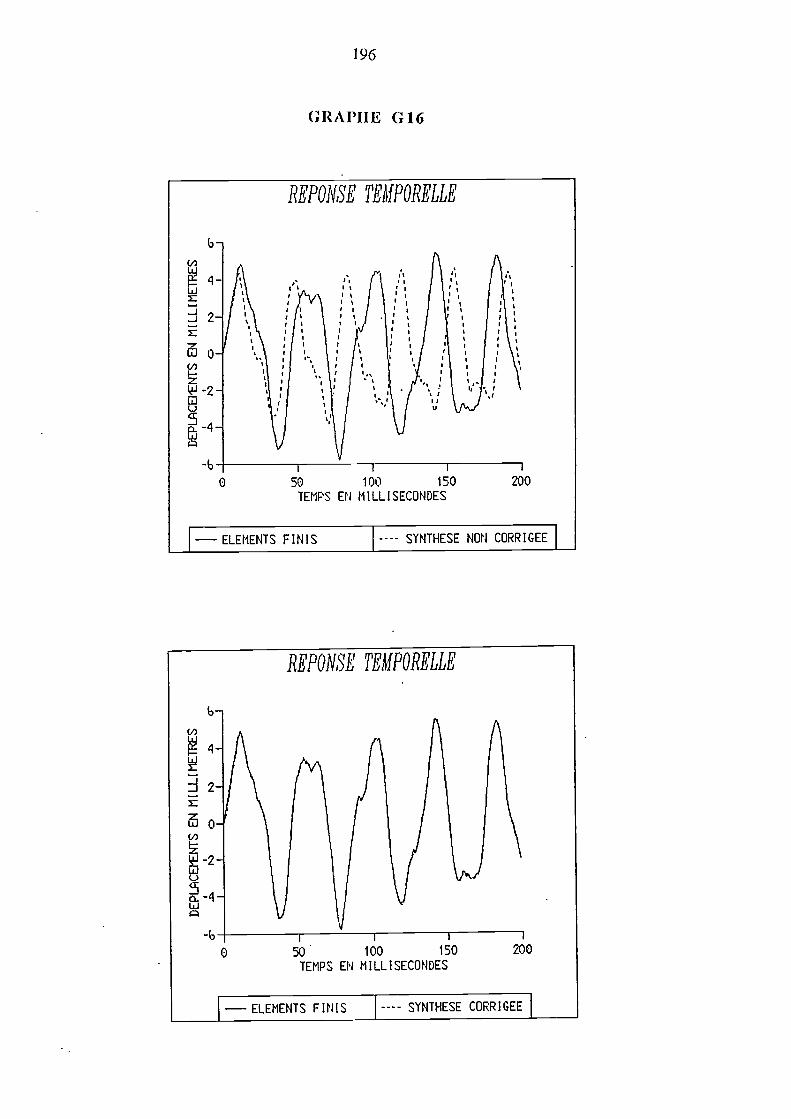
¡96
GRAPhE G16
REPONI9E TEMPORELLE
b
V)w
zwoV)I-
REPONSE TEMPORELLE
- ELEMENTS FINiS SYNTHESE NOIi CORRIGEE
I I
50 100 150 200
TEMPS EH MILLISECONDES
- ELEMENTS FINIS SYNTHESE CORRIGEE
50 100 150 200
TEMPS EN MILLISECONDES
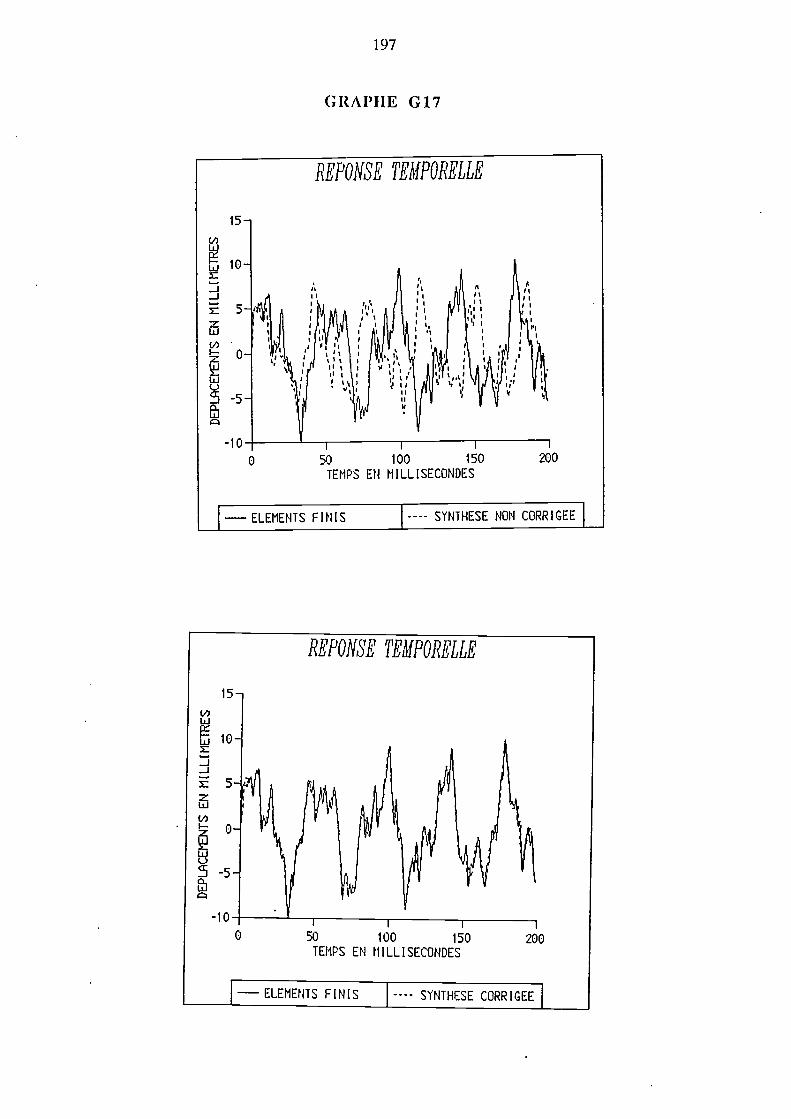
REPOVSE TEMPORELLE
197
(;RAI'HE G17
REPOI'1SE TEMPORELLE
- ELEMENTS FINIS SYNTHESE NON CORRIGEE
o 50 loo 150 200
TEMPS Eti MILLISECONDES
- ELEMENTS FINIS SYNTHESE CORRIGEE
o 50 100 150 200TEMPS EN t1ILLISECONDES
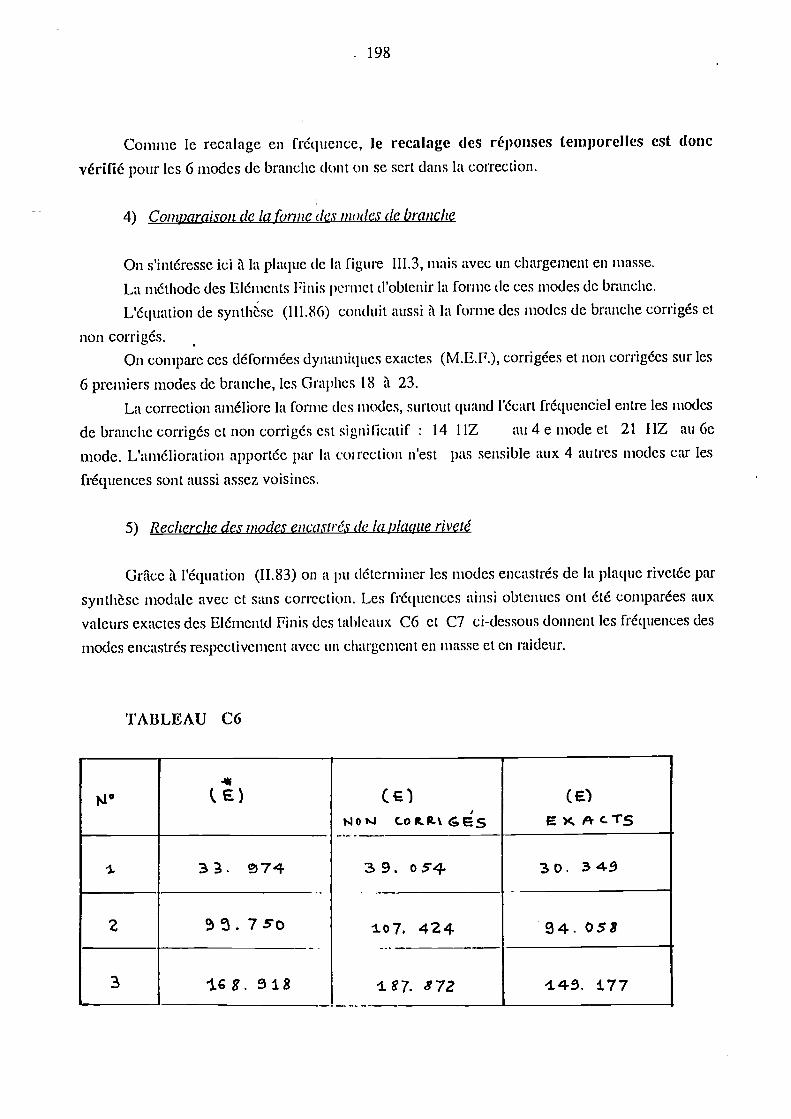
198
Comme le recalage en fréquence, Je recalage (les réponses temporelles est doncvérifié loIIr les 6 modes de branche don t on se sert dans la correction.
Comparaison de la forme cies modes dc branche
On s'intéresse ici la plaque de la figure 111.3, niais avec un chargement en masse.
La méthode des Elénients Finis permet d'obtenir la forme (le ces modes de branche.
L'équation de synthèse (111.86) conduit aussi à la forme des modes de branche corrigés et
non corrigés.On compare ces déformées dynamiques exactes (M.E.F.), corrigées et non corrigées sur les
6 premiers modes de branche, les Graphes 1 8 23.
La correction améliore la forme (les modes, surtout quand l'écart fréquenciel entre les modes
de branche corrigés et non corrigés est signiflcatif 14 lIZ au 4 e mode et 21 lIZ au 6emode. L'amélioration apportée par la coi rection ¡l'est piis sensible aux 4 autres modes car les
fréquences sont aussi assez voisines.
Recherche des modes encastrés dc la plaque riveté
Grâce à l'équation (11.83) on a pu déterminer les modes encastrés de la plaqtie rivetée par
synthèse modale avec et sans correction. Les fréquences ainsi obtenues ont été comparées aux
valeurs exactes des Elémcntd Finis des tableaux C6 et C7 ci-dessous donnent les fréquences des
modes encastrés respectivement avec un chargement en masse et en raideur.
TABLEAU C6
jo (E) (.)NO'4 CoR.t6
(E)
.j. 33. 74 39. 054 30. 34ß
2 .75o 107. 424 94.O5
3 16g. SIS j&7. ß7 j49. j77
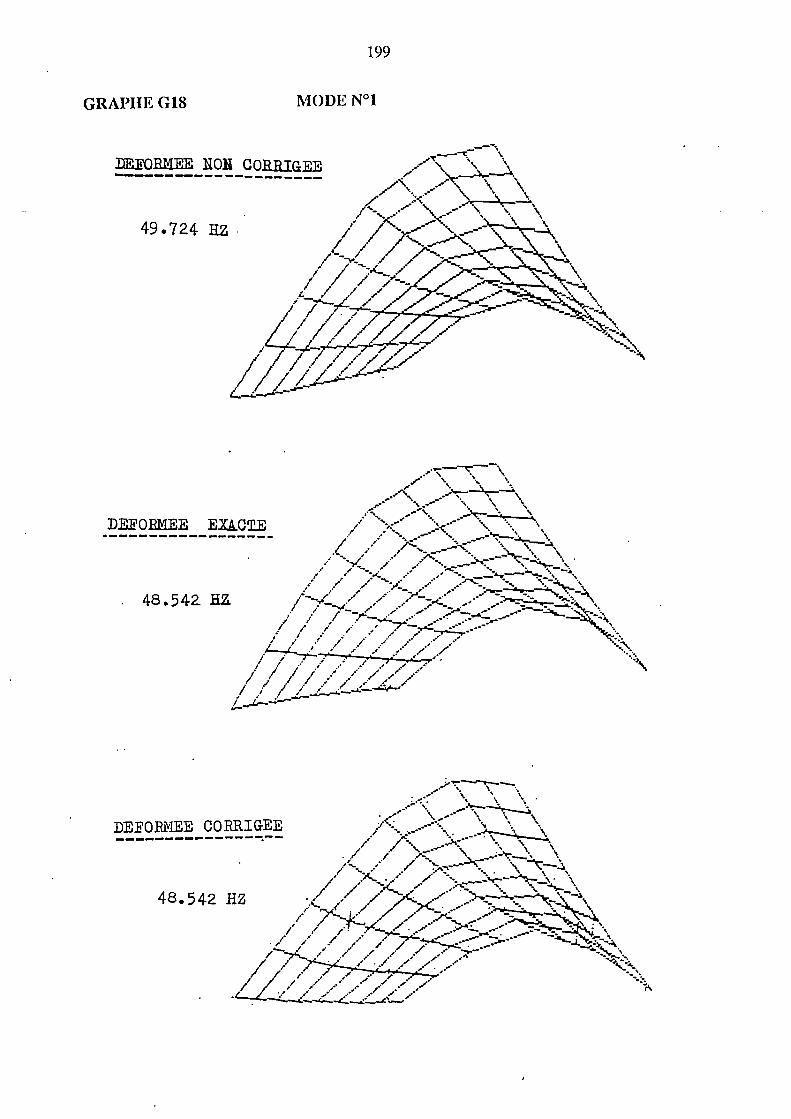
ozC
-.4.,( J
/ I..1
.L'1'..( [.9'f ?'
I
I\.-_-- 1,
,_..J,...."i /Ç
' '\L,
r- j,/ \.%
'1f.
i .,.."t s
'' \/\ç.
\ ,.s
i\\ ./\
Iç
,'%
I'\/ \
.\ I \..
\ li\
.'.'-I
%
N.
¿L
\N N
.._..I
'\ /,
N
NsaD
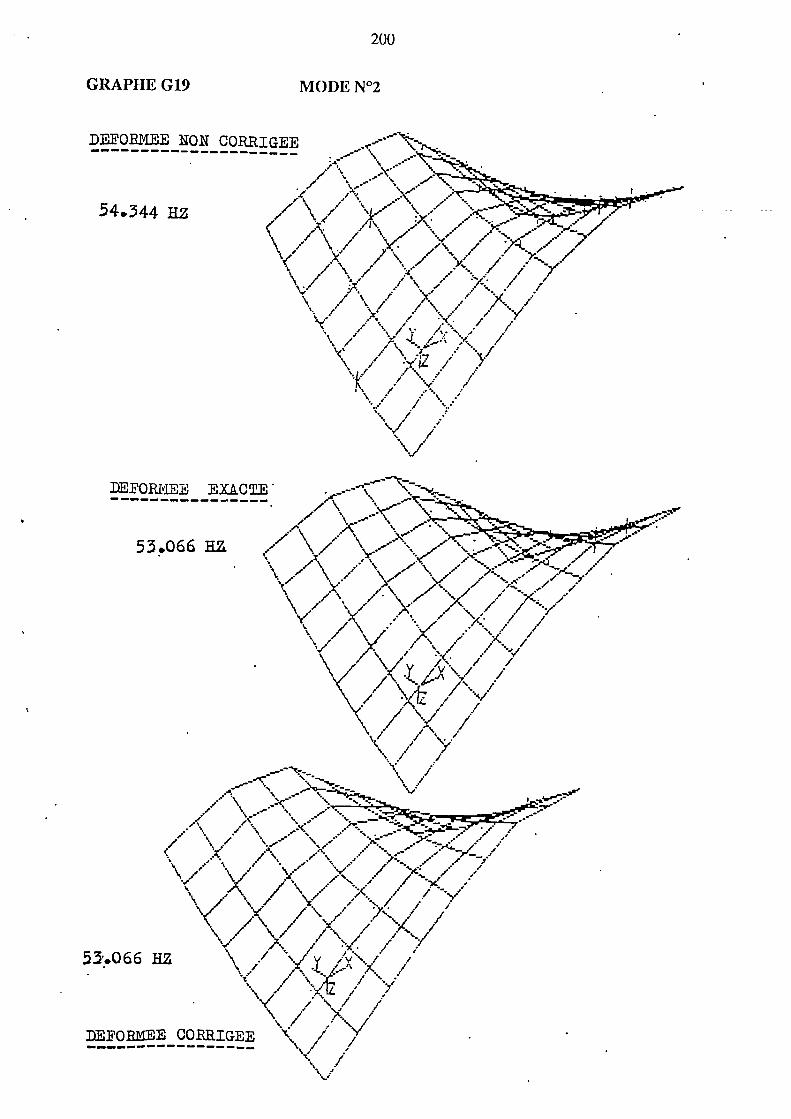
GRAPHE G19 MODE N°2
DEPOBJYIBE NON CORRIGEE
54.344 Hz
DEFORL'iEE EXACTE
53.066
53.066 E
\ _.?C
,' / ;!. P
DEFORNEE CORRIGEE V' "V- \ ¿// /\ .1'.' /
200
\ .-Ks -- 'I *
,/ \ J.,- 's -.. -
Ç /Ç //Y .V\ /\/ / v.( /
X / \ / /_._. i f\ j' \ j' ,X5 f X. .7
/ \ / ' ..- y,. F P -yY- ..--. f // :-j. J
\ r ,/ /\. / X -LX x< / \ 1f., i. 'ç_I\ 'f ,XU- / /
K X ?( \J )< :4 -,/ \ / \ V \/ X. ./'\Ç,//<\ ,/'VK/7</\/V' j/'
<: 4Sc\/ ¡/// 'iz/ 'Xe'/ /
S5 /\ / /j
..--c: '--.....\, \ -- __.:-._ _,_./\ ,/\ ..'< ...2ç: . f-/ \ / \/ . / /\// \ / 'K ,X\ // 7.)/ //// \/ ,Ä% / /1-/ \/ ,/NJ
BZ '\ I ¡ V IV". / /\ /\\/
;, /
7 5/
c .: \ /1. _/;>:::. 7'_.,i
/f,. I . / ii,'-. L- /-.
)Ç, ,/ 'I_ / J
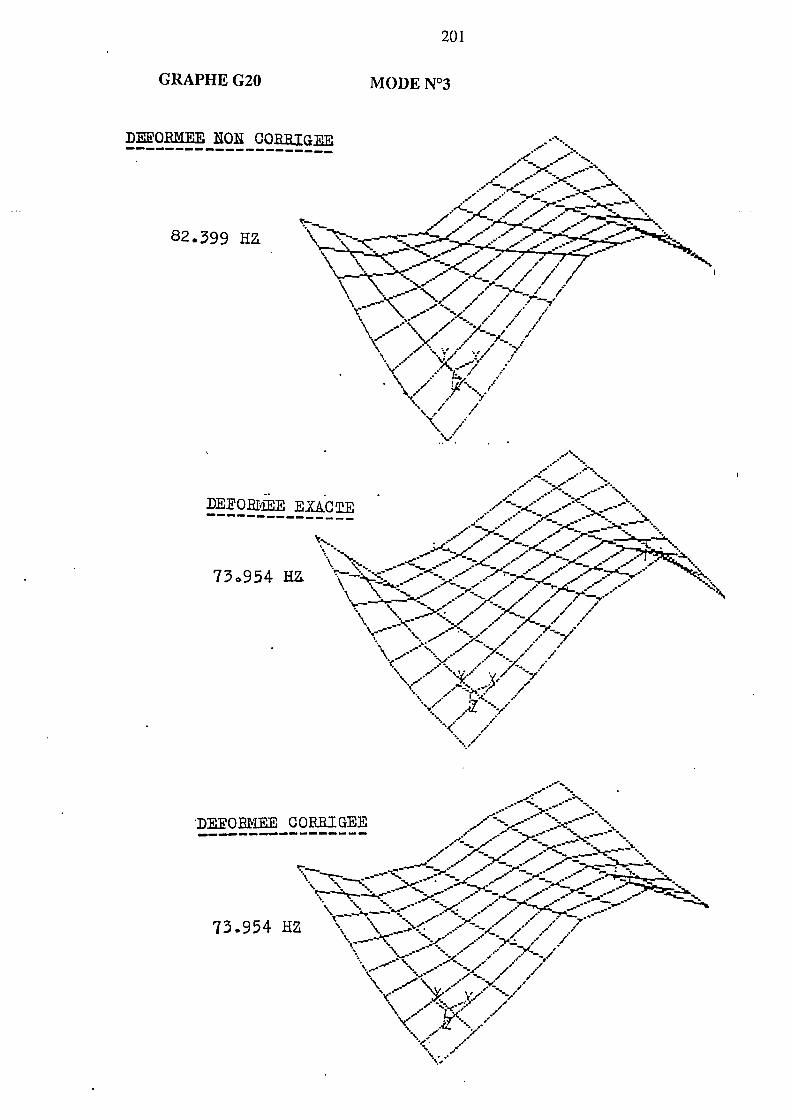
oz
/o-'o-'s
co 'i.
o-to
N
'f
f \,( \/\. \{%
\%\
..'t
-t.t-
_is. J
'.I
'.\''
X \ ,í\ \
\\\\
..'
, "\
r\I\
i\f
\\...,(
)\\\
>%
.\. , N
r\'\
>.\ ,. \.
\i'\?.. \/\, X
N. )f
\,''
,ï\\,'
'\
,.\
iI.
J,
..s
15,\
\?
!\\,.. \
'i>'t
.',/s
\.:\
\/1. \ /
yi't,ç..'
lullt
lt
.J/I)'-
/..çi /
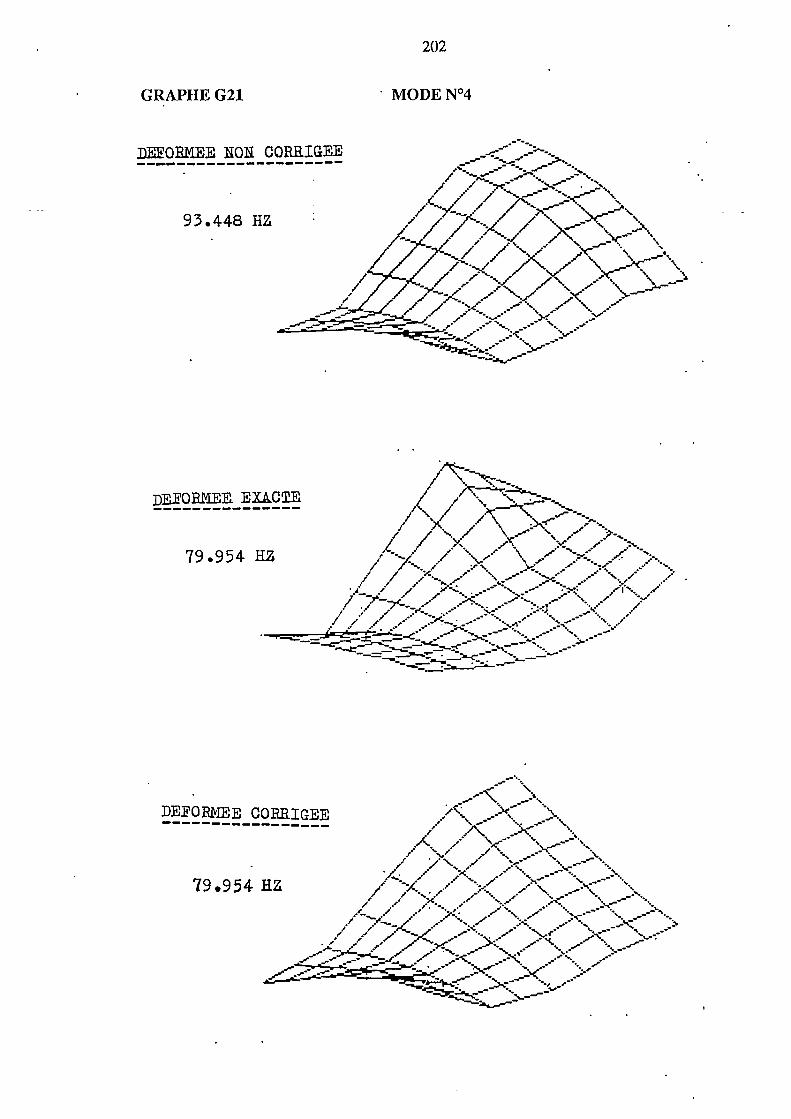
oz
ÇxHooo
,;ili$
,.,Ç5'!/\
,;\ ., iii
....li
,çi/\
!\ ,.X
\/
I.\
1/\
.,..,,.
ti..
, S.
p\.. \
?.,',
.i_'ist
lii...ç..
t_:,t\
\,'S
,'r
\ ì\ yS
., "C
.'V
\ ' I..;
's\
s;
S.S
,
t,S
,S
.I
"K.'K
"\\
,'
'\/\
x.
\.\/'\
'SÇ \
,, \\;
c\_1lJ
¡j
...'4
t3L"o
N
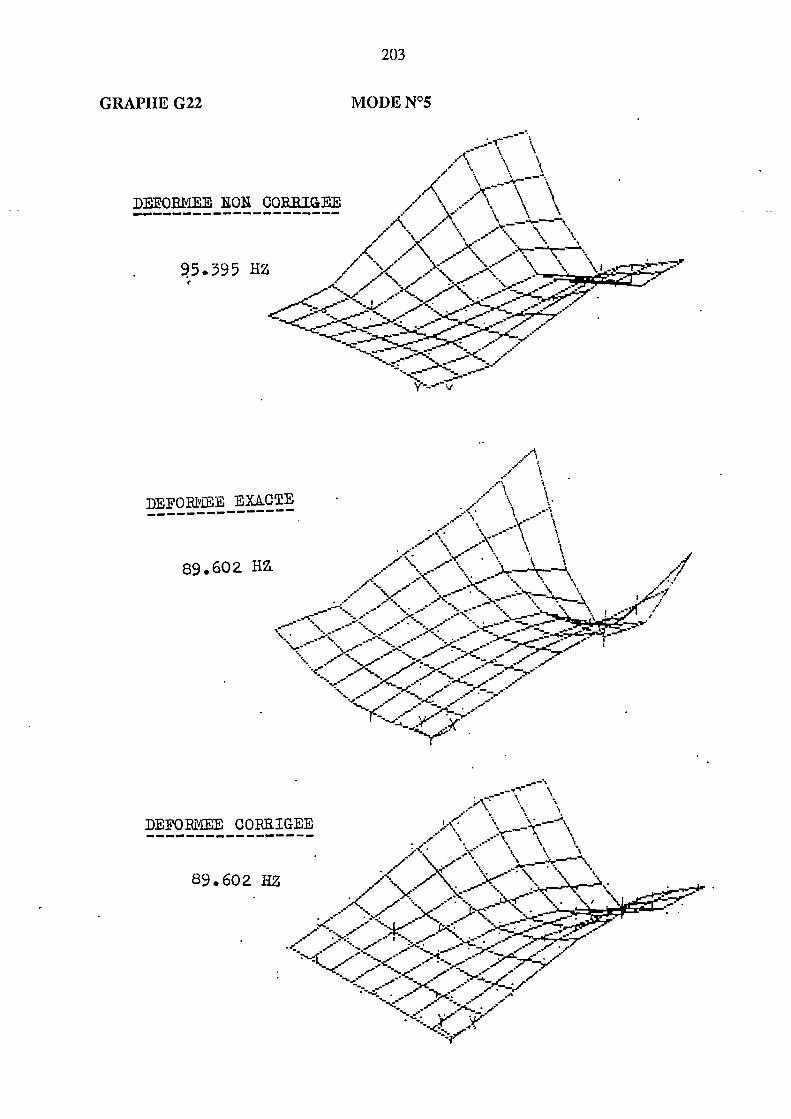
Cn
N
Lfl
oz
cJo.o.'co
cJoIo.'co
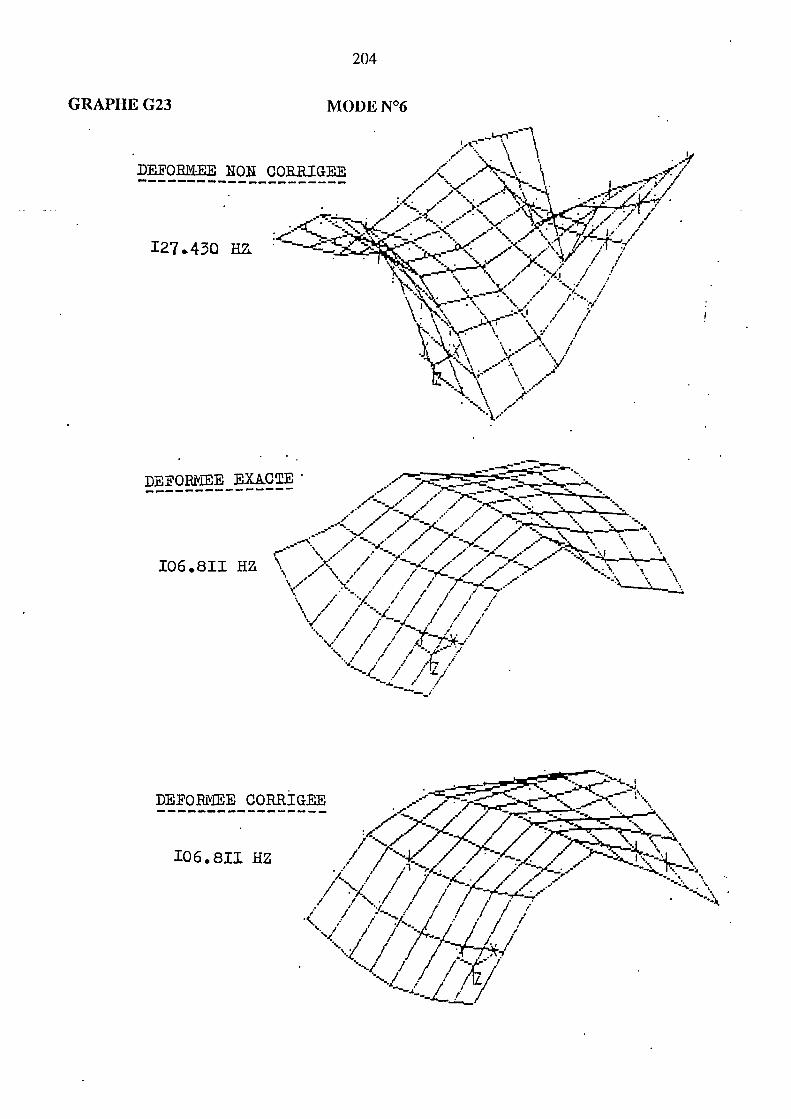
204
GRAPHE G23 MODE N°6
DEFOPM.1 MO1 CORB.IEE
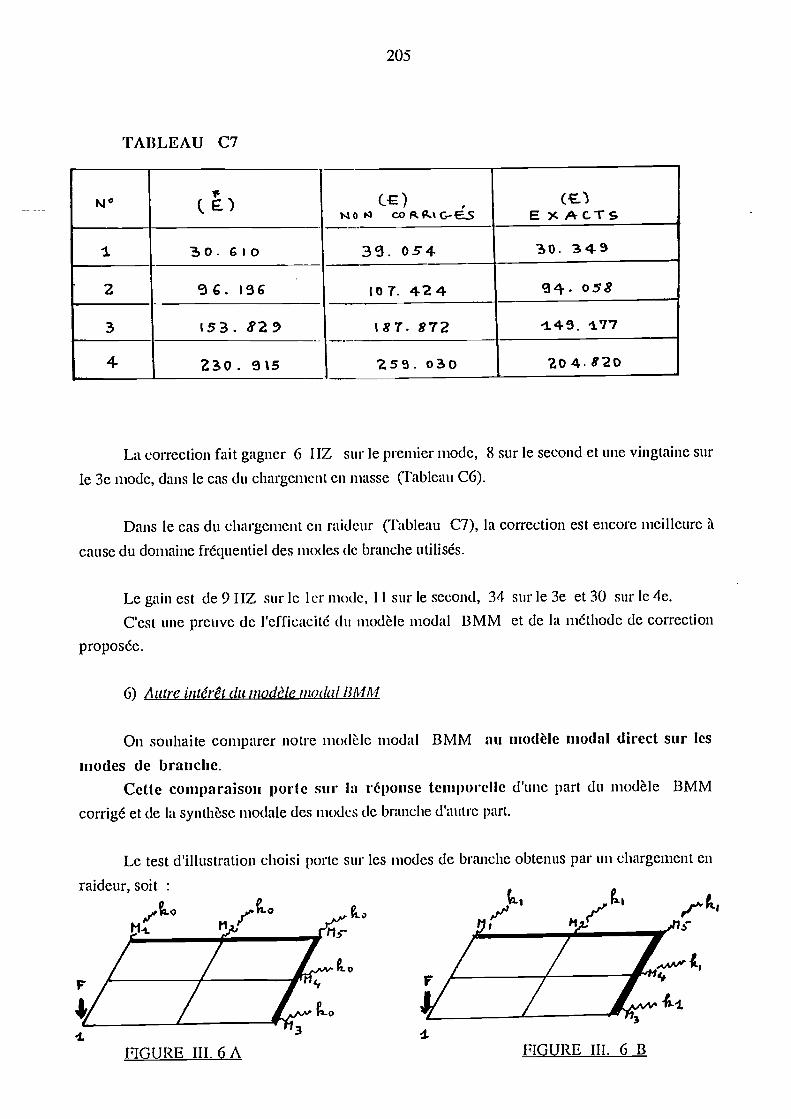
TABLEAU C7
La correction fait gagner 6 lIZ sur le premier mode, 8 sur le second et une vingtaine sur
le 3e mode, dans le cas du chargement en masse (Tableau Có).
Dans le cas du chargement en raideur (Tableau C7), la correction est encore meilleure à
cause du domaine fréquentiel des modes de branche utilisés.
Le gain est de 9 lIZ sur le 1er mode, li sur le second, 34 sur le 3e et 30 sur le 4e.
C'est une preuve de l'efficacité du modèle modal BMM et de la méthode de correction
proposée.
6) Autre intérêt du iiiodVe ,nodal 13MM
On souhaite comparer notre modèle modal BMM au modèle modal direct sur les
modes de branche.Cette comparaison porte sur la réponse temporelle d'une part du modèle BMM
corrigé et de la synthèse modale des modes (le branche d'autre l)a1L.
Le test d'illustration choisi 1)01te sur les modes de branche obtenus par un chargement en
raideur, soit
.11.M
FIGURE III. 6 A
Lv
205
.j.
FIGURE III. 6 B
4
N° () ()4o'3 .'C,ES
iiE)(.ACTS
1 30. 610 39. 054 30. 349
2 9G. ISG 107. 424 4. 058
3 153. 82 187. 872 -i49. 177
4 230. ss Z. 030 204.820

Le but de cette comparaison est dc tester l'efficacité du modèle BMM lorsqu'on impose des
modifications structurales majeures comme des variations des conditions aux limites des raccorde-
ments avec d'autres sous-structures.
La synthèse modale directe basée stir les modes de branche permet-il de prendre ne compte
ces modifications structurales ?
Si la Figure III. 6 A est considérée comme tin état (le référence où l'on cherche les modes
de branche de la plaque chargée en raideur en 5 points Mi, k o = lo N/m, ceux-ci sont
obtenus d'une part par le modèle BMM d'après l'équation (111.86) et d'autre part par la synthèse
des modes de branche à partir de cette équation finale.
{.'\ O)ß -r8 F)
où (LJ est la matrice spectrale diagonale du carré des pulsations des modes de branche
obtenus pour k = 10 N/rn.
X est la matrice modale de cees modes de branche. est le vecteur des coordonnées
modales.
F est la force appliquée au noeud i
Pour une force sinusoïdale F (t) = l0sin 180 t, le Graphe 024 montre (WC BMM
corrigé et le modèle modal des inodes (le branche donnent exactement la même réponse temporelle,
ce qui était prévisible ar définition niêine de l'équation (7). 11 n'est pas nécessaire de faire une
comparaison à la courbe exacte fournie par le calcul direct des Eléments Finis car elle identique à
celle de BMM corrigé. N tests numériques valid«.nt chaque fois cette propriété.
Nous avons ensuite proposé deux variations de la raideur k de jonction à l'interface Lo4
(voir Figure III.6B : on porte k0a une valeur k . = 10 N/rn, puis k = 10 N/in.
Pour un chargement de raideur k k011'énergie de déformation de la plaque s'écrit
-r .?W. -. 9e, ne, ° - i A" [1 j X ¡ > . ?j >
On en déduit l'équation matricielle suivante
(9)
o )It. g.-&
J A
206
+I o T F
o
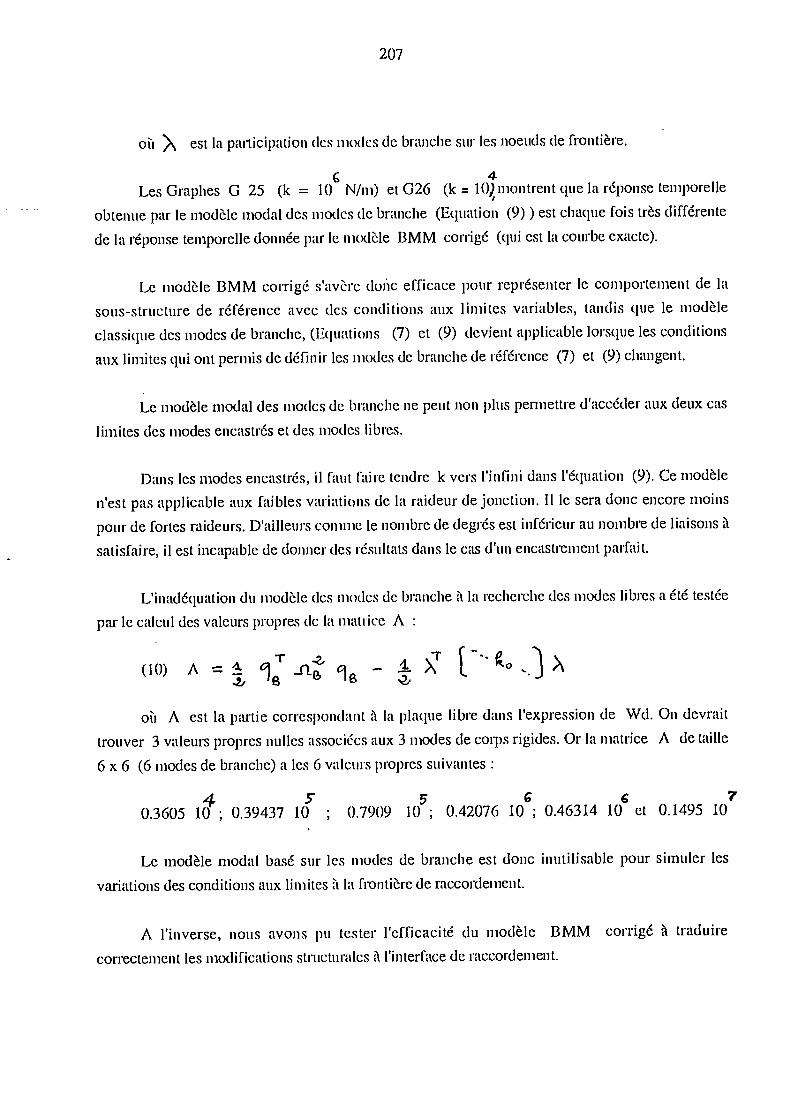
207
où ) est la participation des m(xles de branche sur les noeuds de frontière.
C 4Les Graphes G 25 (k = 10 N/in) et G26 (k = 10) montrent que la réponse temporelle
obtenue par le modèle modal des modes de branche (Equation (9) ) est chaque fois très différente
de la réponse temporelle donnée par le modèle BMM corrigé (qui est la courbe exacte).
Le modèle 13MM corrigé s'avère donc efficace pour représenter le comportement de la
sous-structure de référence avec cies conditions aux limites variables, tandis que le modèle
classique des modes de branche, (Equations (7) et (9) devient applicable lorsque les conditions
aux limites qui ont permis de définir les modes de branche de référence (7) et (9) changent.
Le modèle modal des modes de bianche ne peut non plus pernettre d'accéder aux deux cas
limites des modes encastrés et des modes libres.
Dans les modes encastrés, il faut faire tendre k vers l'infini dans l'équation (9). Ce modèle
n'est pas applicable aux faibles variations de la raideur de jonction. Il le sera donc encore moins
pour de fortes raideurs. D'ailleurs comme le nonthre de degrés est inférieur au nombre de liaisons à
satisfaire, il est incapable de donner cies résultats dans le cas d'un encastrement parfihit.
L'inadéquation du modèle cies modes de branche à la recherche des modes libres a été testée
par le calcul des valeurs propres de la mnatlice A
T(10) A >1
où A est la partie correspondant la )laque libre dans l'expression de Wd. On devrait
trouver 3 valeurs propres nulles associées aux 3 modes de corps rigides. Or la matrice A de taille
6 x 6 (6 modes de branche) a les 6 valeurs propres suivantes
4 5 5 G G 70.3605 10 ; 0.39437 10 ; 0.7909 10 ; 0.42076 10 ; 0.46314 10 et 0.1495 10
Le modèle modal basé stir les modes de branche est donc inutilisable pour simuler les
variations des conditions aux limites à la frontière de raccordement.
A l'inverse, nous avons pu tester l'efficacité du modèle 13MM corrigé à traduire
correctement les modifications structura les à l'interface de raccordement.
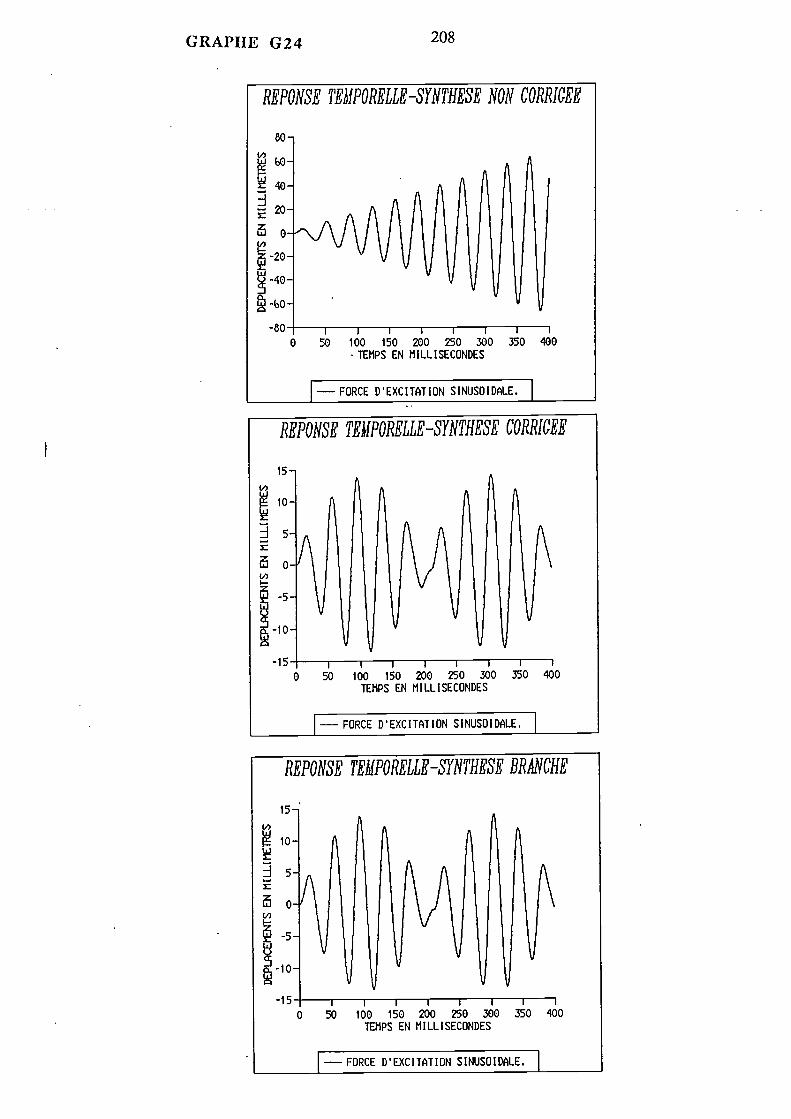
REPONSE TEAIPORELLE-SYNTHESE NON CORRIGEE
80-
20-
0-
Ef
I
5-
zWOI-
REPONSE TEfPORELLE-SYNTHESE CORRIGER
-5-
-10-
15
0
A
'J
- FORCE D'EXCITATION SINUSOIDALE.
i j j j (
50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
REPONSE TEMPORELLE-SYN THESE BRANCHE
\J
- FORCE D'EXCITATION SINUSOIDALE.
15-
10-
i 5-
O-
-5-
-10--
15 i j j I
GRAPHE G24 208
80j j j I I
o 50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
- FORCE D'EXCITATION SINUSOIDALE.
O 50 100 150 200 250 300 350 400
TEMPS EN IIILLISECONDES
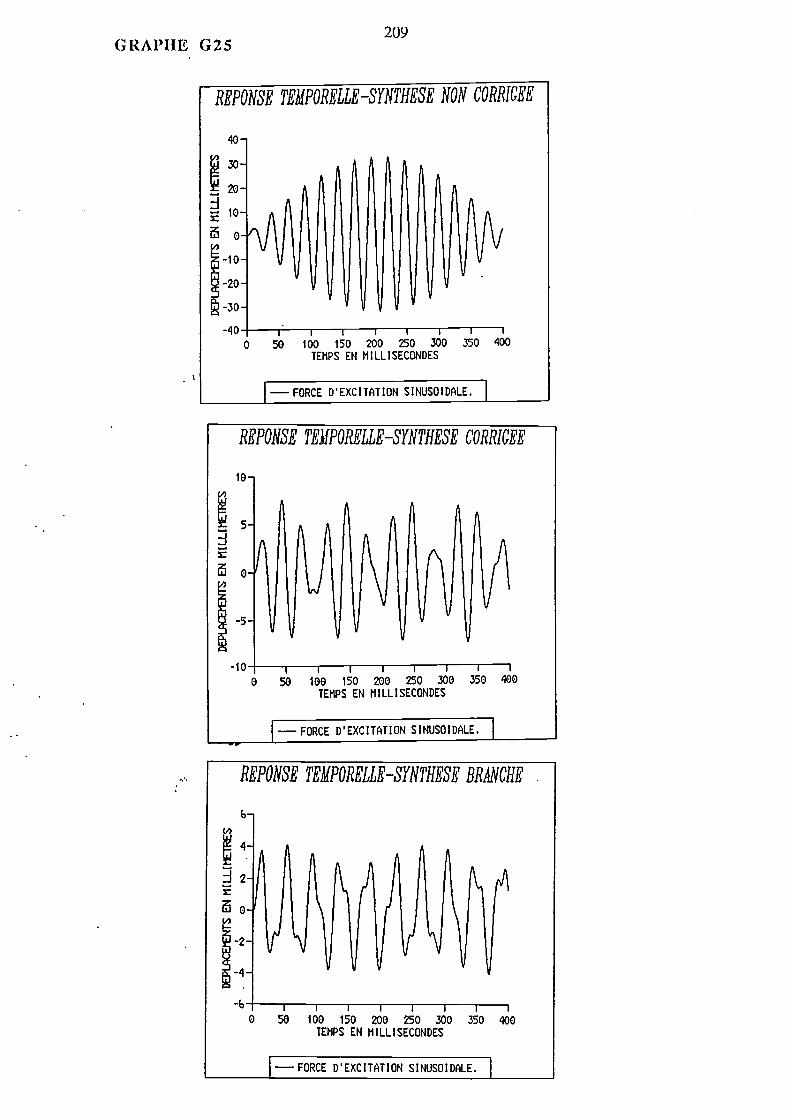
(;RAPHE G25
REPONSE TEMPORELLg-SYNTHESE NON CORRIGEE
20- 1
-30-
40
O
i
I I I I I
50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
- FORCE D'EXCITATION SINUSOIDALE.
REPONSE TEfPORELLE-SYNTHESE CORRiGER
J
FORCE D'EXCITATION SINUSOIDALE.
I I I I I
50 100 150 200 250 300 350 400
TEMPS EN IIILLISECONDES
b-V)
REPONSE TEMPORELLE-SYN THESE BRANCHE
4-.
2-
-2-
209
I
I I I I I
50 100 150 200 250 300 350 400
TEMPS EN MILLISECONDES
FORCE DEXCITATION SINUSOIDALE.
A
f
J
Io
o
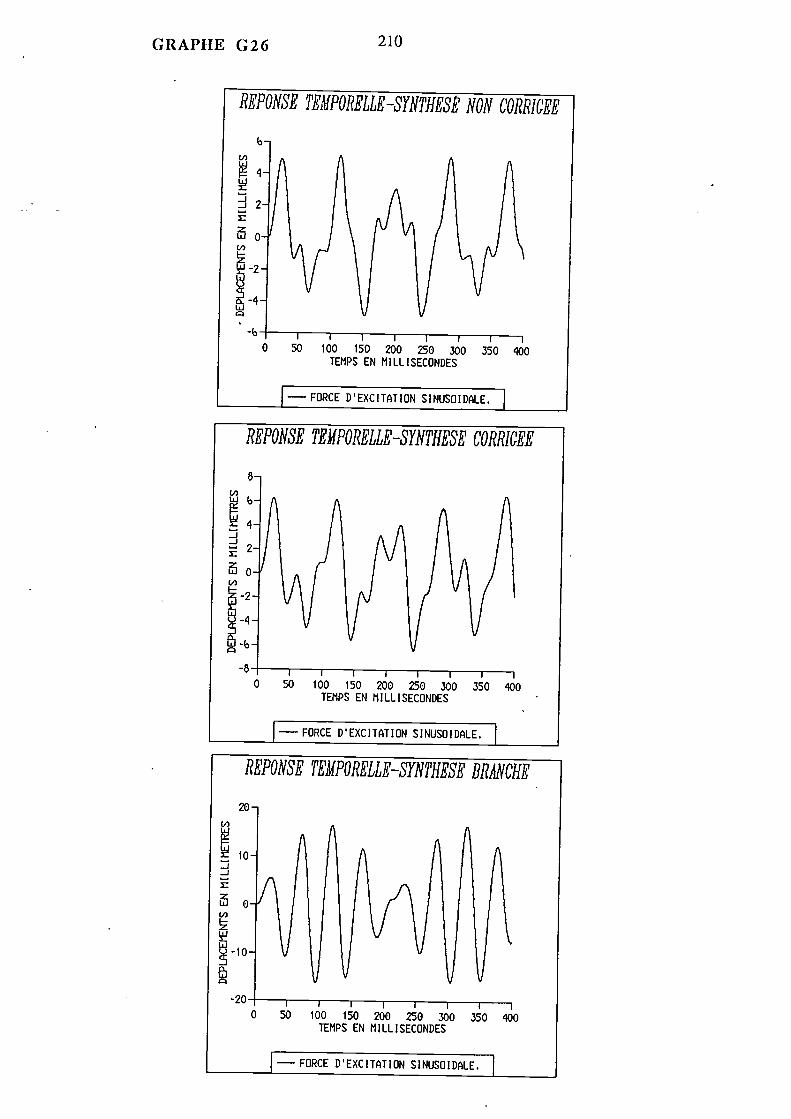
REPONSE TEMPORELL8-SYNTHESR NON CORRiGER
b-'
t,,
J 2-r
0-
F2
8
-4-
20
r
/I I I I I50 lOO 150 200 250 300 350 400
TEMPS EN MILLISECONDES
FORCE D'EXCITATION SINUSOIDALE.
REPONSE TEJIPORELLE-SYNTHESE CORRIGER
I I I I ¡
50 tOO 150 200 250 300 350 400TEMPS EN MILLISECONDES
- FORCE D'EXCITATION SINUSOIDALE.
REPONSE TEMPORELLR-SYNTHEg' BRANCHE
- FORCE D'EXCITATION SINUSOIDALE,
GRAPHE G26 210
I I I I I
0 50 100 150 200 250 300 350 400TEMPS EN 1IILLISECONDES
b
o
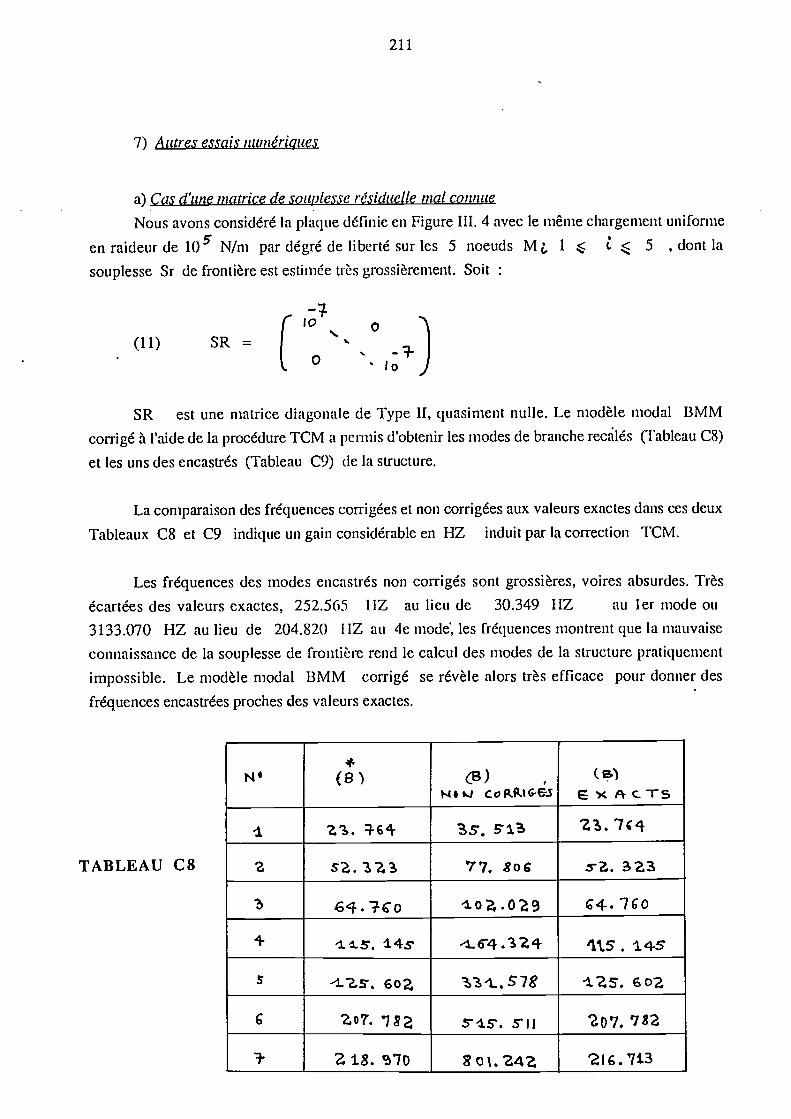
7) Autres essais nwnériques
a) Cas d'une natrice de souplesse résiduelle mal connue
Nous avons considéré la plaque définie en Figure III. 4 avec le même chargement uniforme
en raideur de 10 N/rn par dégré de liberté sur les 5 noeuds M . i 5 , dont la
souplesse Sr de frontière est estimée très grossièrement. Soit
(11) SR =
TABLEAU C8
211
SR est une matrice diagonale de Type 11, quasiment nulle. Le modèle modal BMM
corrigé à l'aide de la procédure TCM a permis d'obtenir les modes de branche recilés ('I'ableau C8)
et les uns des encastrés (Tableau C9) (le la structure.
La comparaison des fréquences corrigées et non corrigées aux valeurs exactes dans ces deux
Tableaux C8 et C9 indique un gain considérable en HZ induit par la correction TCM.
Les fréquences des modes encastrés non corrigés sont grossières, voires absurdes. Très
écartées des valeurs exactes, 252.565 LIZ au lieu de 30.349 lIZ au 1er mode ou
3 133.070 HZ au lieu de 204.820 lIZ au 4e mode les fréquences montrent (IUC la mauvaiseconnaissance de la souplesse de frontière rend le calcul des modes de la structure pratiquement
impossible. Le modèle modal BMM corrigé se révèle alors très efficace pour donner des
fréquences encastrées proches des valeurs exactes.
N' (8) B)CoRP.GES E,(c-c.Ts
V. g st' 2.74z 77, go6 .Z. 323
to?..O94 -i.&54S -L64324
42.S. 60Z -i..,S78 -iZ. Gb2
G 2.o7 '7 s-ts-. sii 'a07. 72
3. 2.18. '1O 216.7t3
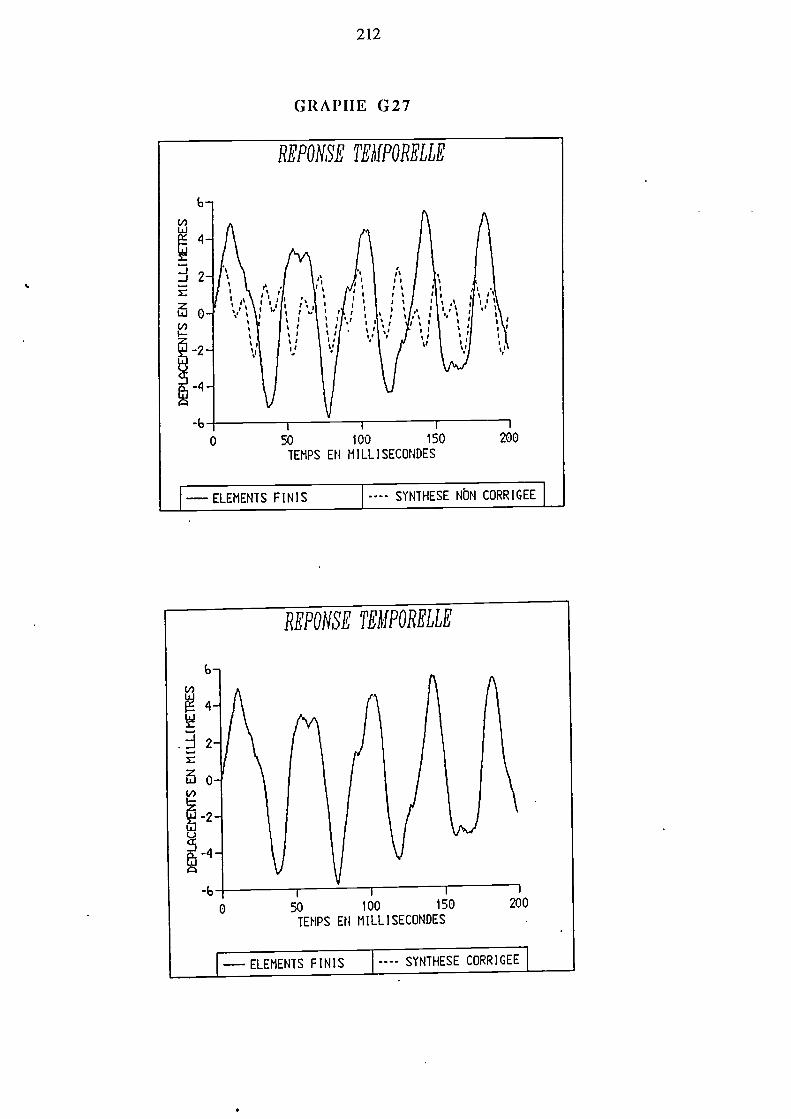
212
GRAPHE G27
REPONSE TEhIPORELLE
t',k-
b
. 2-z
b
O
REPONSE TEMPORELLE
/\J
I I I I
50 100 150 200
TEMPS EU MILLISECONDES
- ELEMENTS FINIS ---- SYNTHESE CORRIGEE
oI I
50 loo 150 200
TEMPS EM MILLISECONDES
SYNTHESE NON CORRIGEE- ELEMENTS FINIS
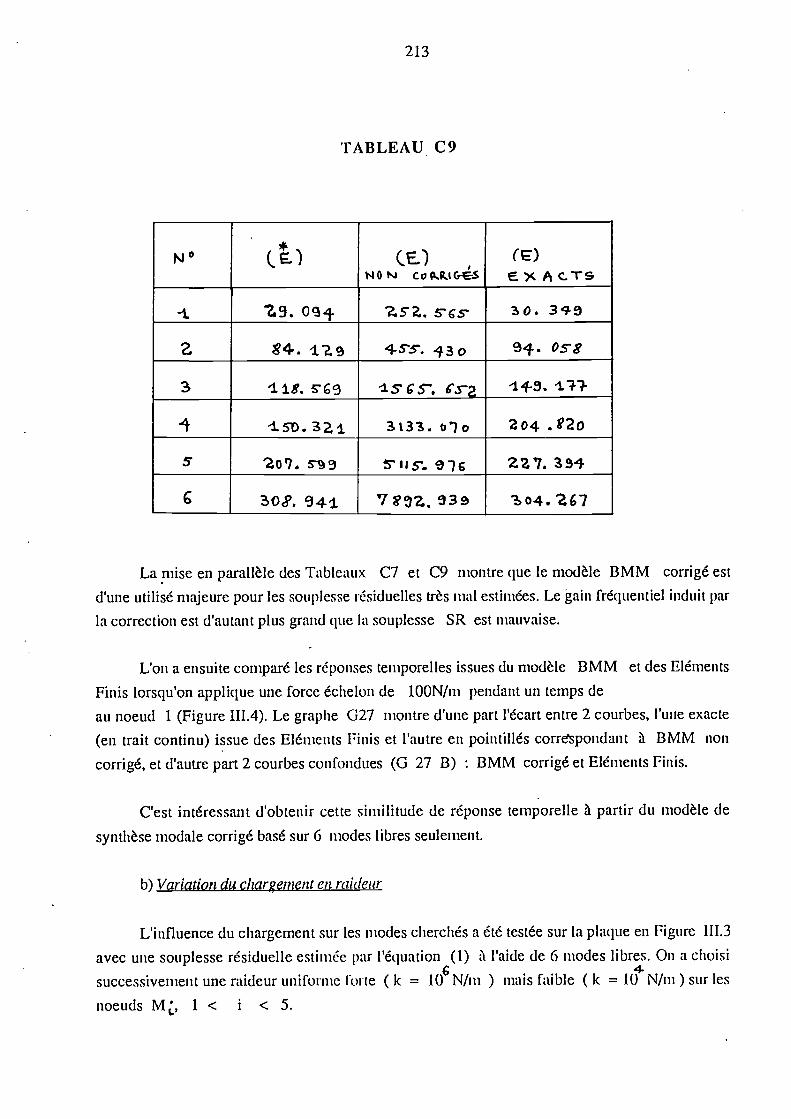
213
TABLEAU C9
La mise en parallèle des Tableaux C7 et C9 montre que le modèle BMM corrigé estd'une utilisé majeure pour les souplesse résiduelles très mal estimées. Le gain fréquentiel induit par
la correction est d'autant plus grand que la souplesse SR est mauvaise.
L'on a ensuite comparé les réponses temporelles issues du modèle BMM et des Eléments
Finis lorsqu'on applique une force échelon de lOON/rn pendant un temps de
au noeud i (Figure 111.4). Le graphe G27 montre d'une part l'écart entre 2 courbes, l'une exacte
(eu trait continu) issue des Eléments Finis et l'autre en pointillés correspondant t BMM noncorrigé, et d'autre part 2 courbes confondues (G 27 B) : BMM corrigé et Eléments Finis.
C'est intéressant d'obtenir cette similitude de réponse temporelle à partir du modèle de
synthèse modale corrigé basé sur 6 modes libres seulement.
b) Variation du chargement en raideur
L'influence du chargement sur les modes cherchés a été testée sur la plaque en Figure 111.3
avec une souplesse résiduelle estimée par l'équation (1) à l'aide de 6 modes libres. On a choisi
successivement une raideur uniforme forte ( k = 106 N/ni ) mais faible ( k = l( N/rn ) sur les
noeuds M, i < i < 5.
N° (_E)t4OPJ CcPJjCrE$
(E).ACTS
1. oc1 ?O. 3q-3
z va 4Ss. '3o 94. ogg
3 tcg-, Ci-2
4 sr.3z 3t33.ù'lc, 204.g20
5 'IIS. 916 ZZ7. 334
308, 941 O4.267
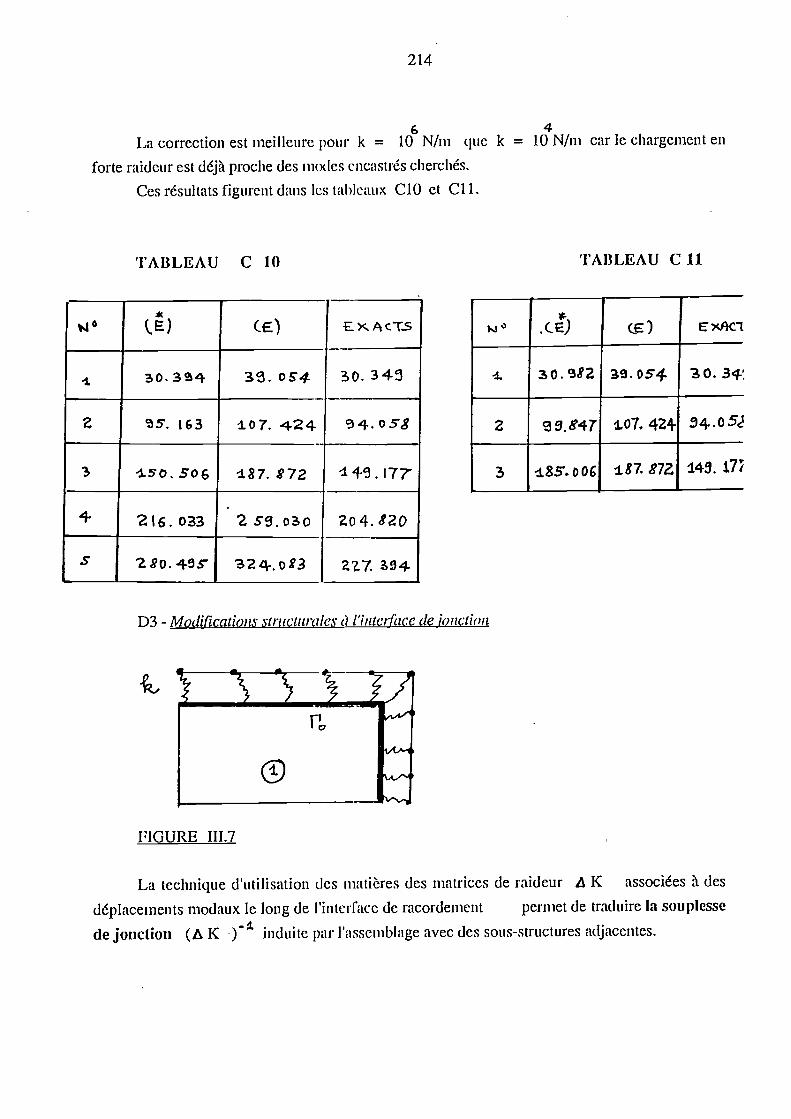
6 4La correction est meilleure pour k = 10 N/rn que k = lo N/rn car le chargement en
forte raideur est déjà proche des modes encastrés cherchés.
Ces résultats figurent dans les tableaux ClO et Cl L
TABLEAU c lo
D3 - Ivlodijications structurales û l'interface de jonction
FIGURE 111.7
La technique d'utilisation des matières des matrices de raideur 4 K associées à des
déplacements modaux le long de l'interface de racordernent permet de traduire la souplesse
de jonction ( K)_i induite par l'assemblage avec des sous-structures adjacentes.
214
TABLEAU C 11
w° .CE) ()30.9S2 39.054 30.3Ç
2 99.e47 o7.424 4,O5c
' .t8S.oOG L&7. 27Z 149. t7
() E'SACTS
- 30.34 3.054 3o.34
Z 3. 163 i07. 424 94.05S
-3.0.5O6 t7.72 i.1&J77
4 216.033 259.o?o Zo4.S20
S 220. 4c 324-,oS3 Z7. 394
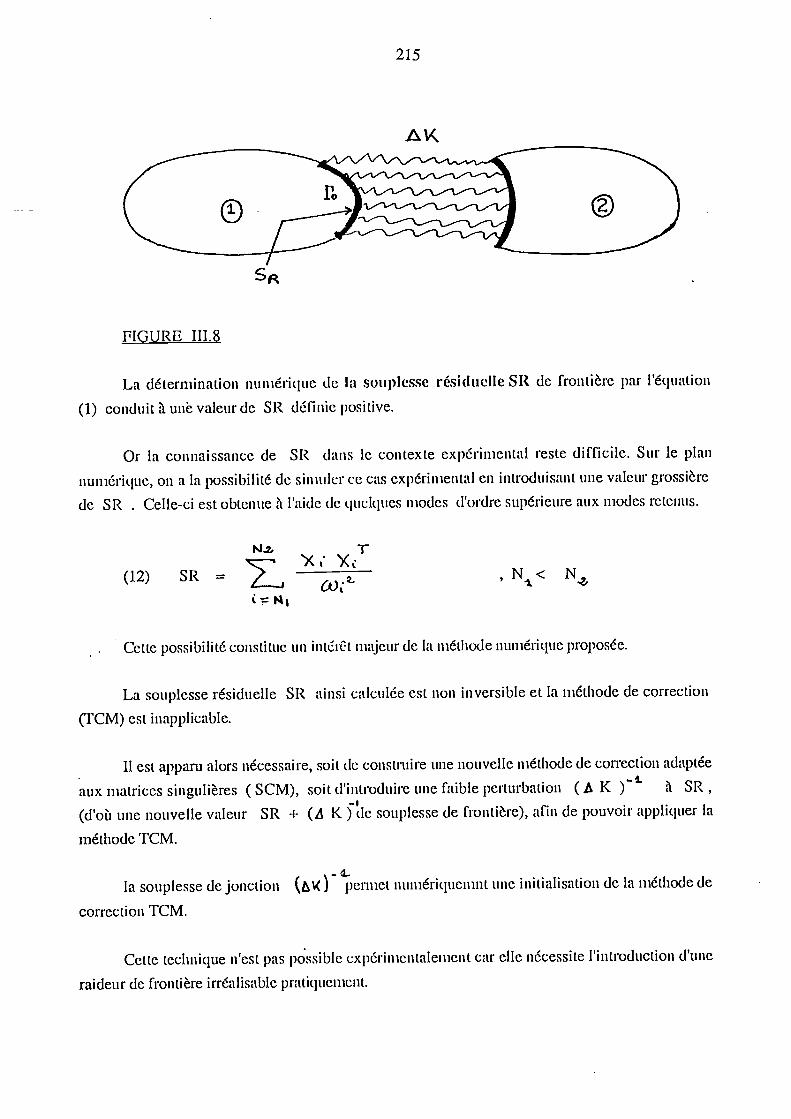
FIGURE 111.8
La d&ermination numérique dc la souplesse résiduelle SR de frontière par l'équation
(1) conduit t une valeur de SR définie positive.
Or la connaissance de SR dans le contexte expérimental reste difficile. Sur le plan
numérique, on a la possibilité dc simuler ce cas expérimental en introduisant une valeur grossière
de SR . Celle-ci est obtenue à l'aide de quelques modes d'ordre supérieure aux modes retenus.
(12) SR =1
T
215
,N< N,,
Cette possibilité constitue un iiì1éit majeur (le la méthode numérique proposée.
La souplesse résiduelle SR ainsi calculée est non inversible et la méthode de correction
(TCM) est inapplicable.
Il est apparu alors nécessaire, soit dc construire une nouvelle méthode de correction adaptée
aux matrices singulières ( SCM), soit (l'introduire une faible perturbation ( K)_1 à SR
(d'où une nouvelle valeur SR + (4 K )de souplesse de frontière), afin de pouvoir appliquer la
méthode 'I'CM.
la souplesse de jonction ) - permet numériquemnt une initialisation de la méthode de
correction TCM.
Cette technique n'est pas pssible expérimentalement car elle nécessite l'introduction d'une
raideur de frontière irréalisable pratiq ucinen t.
216
L'introduction de la souplesse (le jonction ÇAK) conduit t la résolution de 3
principaux problèmes aux frontières chargées.(i) ( K J permet (l'initialiser les méthodes de correction. La
technique utilisée consiste choisir ( KY'pour que S = SR + (A Kitsoit définie positive.
La souplesse S peut alors être corrigée soit par la méthode 1'CM , soit par SCM.
Soit S la valeur de S corrigée.On cherche alors les modes encastrés de la sous-structure
à la frontière 1 partir de la souplesse corrigée - (4 K)1 Cette opération de soustraction
est dangeureuse car la matrice S-Kï1 l)eut perdre son caractère défini l)OSitif. Il apparait
donc intéressant d'introduire des souplesse - de jonction faibles ou négligeables dans
certains cas pour éviter la soustraction S - ( K
Cette technique est numérique et ne peut s'appliquer dans le cadre expérimental.
(i i) (A K'tperinet (le (léterluiner le souplesse associée à la troncature modalesans initialisation.
(i i) K) - peruiet enfin de simuler l'introduction d'une raideur dejonction mal connue.
1) Initialisation (les ,nét hock's de CO/Te CtiO/i
on souhaite calculer les modes encastrés de la sous-structure (Figure 111. 7 ou Figure
111.8) bloquée l'interface t , et dont la souplesse résiduelle (le frontière SR est mal connue.
C'est dire que SR est une matrice de type 11 (matrice SR diagonale, définie positive), ou de
type HI (matrice SR estimée par l'équation (12)).
On améliore les résultats des piocédttres de correction proposées en ajoutant une souplesse
de jonction fictive (Kr à SR. Soit:
(13) S = SR + (t KY&
-IIl convient ensuite de retirer ( K) à S, la valeur corrigée de S, ( S - o K)
Les modes de branche servant à la correction sont obtenus t d'un chargement inertiel
(1/10 de l'inertie totale de la placlLIe en acier de référence, répartie sur les 13 noeuds fictifs de la
frontière r0 , Figure 111.7).
217
Nous avons considéré deux types de frontière dans les essais numériques
d'abord X avec ses 39 DDL (3x13) puis fo avec seulement les 13 DDLde translation.
Ces deux nombres (13 et 39) ont l)Cs de tester l'influence du nombre de dégrés de liberté de
frontière sur les résultats de ces proltres de correction:
Les matrices de soul)lesse de jonctions Á K) utilisces sont diagonales. L'operation
de soustraction S - Ç() rend cette matrice singulière lorsque S est obtenue par la correction
TCM dans la majorité des essais effectués.
C'est pourquoi la méthode SCM a servi en général à illustrer cette technique d'utilisation
d'une souplesse de jonction et dtune frontière fictive 1 à des fins essentiellement nunlériques.
Tous les essais ont été effectués avec 9 modes libres.
a) Correction d'une J'rontkre avec 39 DDL
Dans les tableaux C12 à Cl 6, K est une matrice 3x3 diagonale de chargement en
raideur sur chacun des 13 noeuds (le l'interface P0 . SR est estimée grossièrement par
l'expression (12).
Le calcul des modes encastrés (le la sous-structure est impossible sans la correction. La
souplesse résiduelle SR est en effet non inversible.
-tLa méthode TCM est non plus inaplicable car l'opération S - Ç K) rend cette matrice
non inversible après la correction.
C'est la méthode SCM qui permet d'estimer efficacement les premiers modes encastrés de
la sous-structure . Les résultats sont en général d'autant meilleurs que la souplesse (A KY de
jonction est faible et SR estimée avec pluis de modes.
C'est une correction difficile à cause du nombre élevé (39) de DDL de frontière, avec
seulement 9 modes libres.
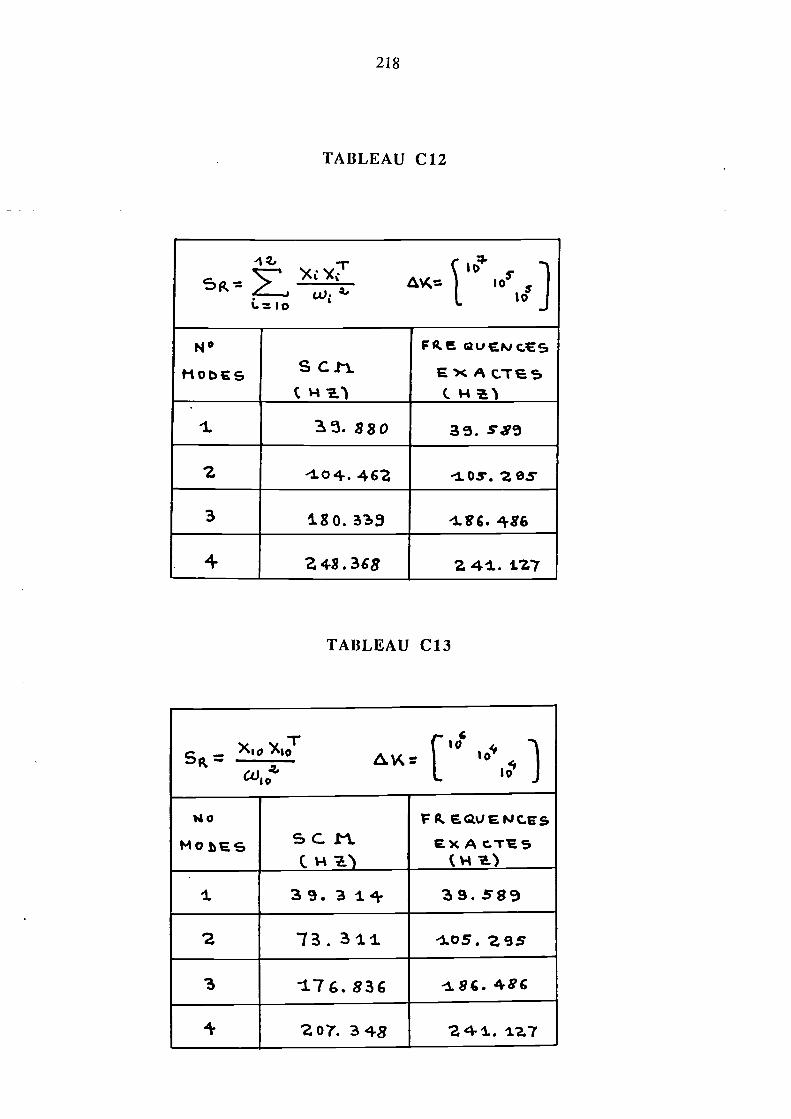
218
TABLEAU C12
TABLEAU C13
Sß-r
>' 'A )
(%DIioj
ID
N°
MoD9 SCIl.QUÇJC.V5
(Ht 3. S80 3. 58
'Z -t04.46Z tDS.2øS
3 t8O.3 tgC.4g6
4 Z4L368 24t.tZ7
Spb iÇ:IV , ]COR,
No
MObEG t-t(HF)
XACTE5
t 9.589
2 13.311 -tOS.Z'35
1.76,83G -.8C.48
i. 2D.343 '24t.127
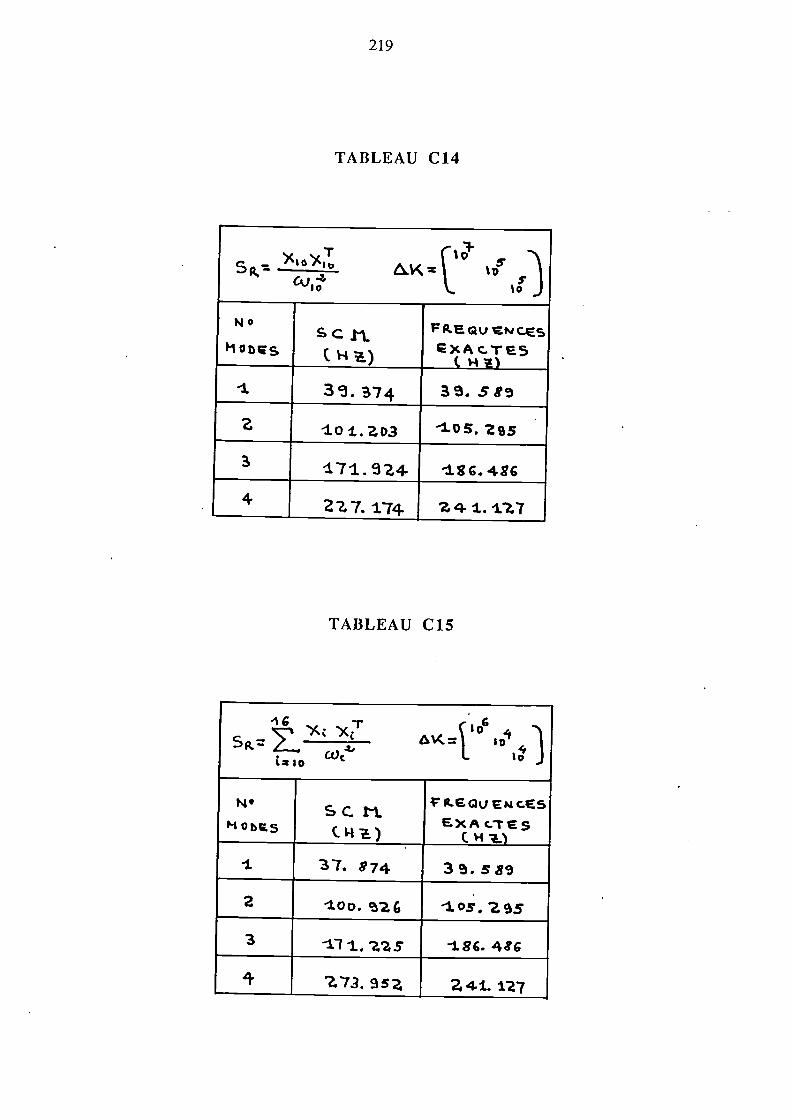
219
TABLEAU C14
TABLEAU C15
&,Io u J
Nu FEQUJCXA E5
-t 3.374z
t71.924 tgG.4g6
227.114 24t.tVl
IC
IoJIo
N' Scri. EI4 CESE X A CT E 5
37. 974 39.58e2 1.00. 1.03.295
1.86.486
1 241. 127
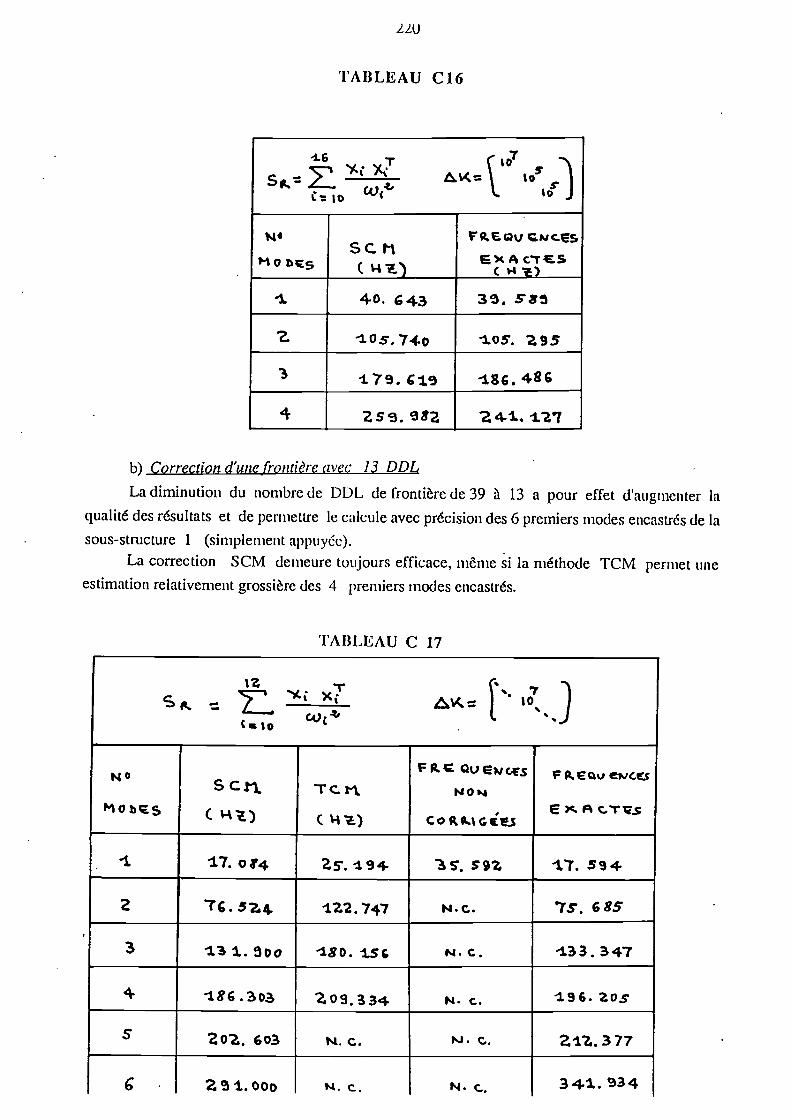
22U
TABLEAU C16
b) Correction d'une frontière avec 13 DDL
La diminution du nombre de DDL de frontière de 39 à 13 a pour effet d'augmenter laqualité des résultats et de pelmettie le calcule avec précision des 6 premiers modes encastrés de lasous-structure i (simplement appuyée).
La correction SCM demeure toujours efficace, même si la méthode TCM permet uneestimation relativement grossière des 4 premiers modes encastrés.
TABLEAU C 17
t6 I,lu
Mobsctl(4v)
VJJC.ES)c A cl LSCH)
1. 40. G43 3. 58z 105,74e 1.05. 295
1.79.C19 186.496
4 Zse.82 24.tt2'l
.7
El0%J
M0bS (H (4)FR.QuEws
Co%Gj
P.Eue,iCs
17. 014 25. i94 5. S92. -tr. 594
z 524 122.747 P4.C. 7:. 685
3 1 t. ØO 180. j N. c 133. 347
4 186.303 209334 Nc. 196.Zog
202. 603 tiL. c. I.J. C.. Z12..377
C Z1..0OD M.. N.c.. 34t34
221
2) IViodes ijorinatix d'une strl(CllIrc avec un joint cl l'intc,face
Ce modèle est représenté pur la Figure 111.7. Ii est valable dans les deux contextes
numérique et expérimental.
La nouvelle structure est formée par la sous-structure ® munie d'un joint élastique de
raideurK par noeud à l'interface r0 . Cette structure a pour frontière de raccordement r
On y effectue un chargement inertiel ( I/i O de l'inertie totale de la plaque) uniforme sur ses 13
noeuds. Sa souplesse de frontière S est donnée par l'expression (13).
La correction est réalisée avec 9 modes libres et 9 modes de branche puff les deux méthodes
des 'J'CM et SCM.
-iLa souplesse totale de frontière S = SR + 1 K] est inversible. Mais selon la
prépondérance d'un des termes SR ou (A K) ur l'autre, cette matrice S sera à diagonale
dominante (Type II, donc adaptée à 1'CM) ou faiblement singulière (Type Ill, adaptée à
SCM).
Ainsi, bien que les cieux méthodes de correction s'appliquent dans ce contexte, et donnent
des résultats meilleurs au modèle BMM non corrigé, des différences vont uIpI)ulrutître entre elles
allant de quelques I-Iertz à des dizaines (le I leitz pour des raisons liées au type de matrice S.
Les tableaux C18, C20, C2l et C22 où le choix de la méthode SCM est préférable sont
obtenus pour des matrices S de type III alors que les Tableaux C19 et C23 où la méthode
TCM donne de meilleurs résultats jwovienmieiit d'une utilisation de S de type II.
Il convient de remarquer que la méthode TCM est inapplicable dans ces essais sans
l'addition de la souplesse de jonction A K] à la souplesse résiduelle SR.
Malgré cette introduction de tA K i', c'est la méthode SCM qui apparait plus efficace
dans la correction des frontières à grand nombre de D.D.L.
a) Correction d'une fronikrc avec 39 D.D.L.
Les résultats figurent dans les Tableaux C18 à C22.
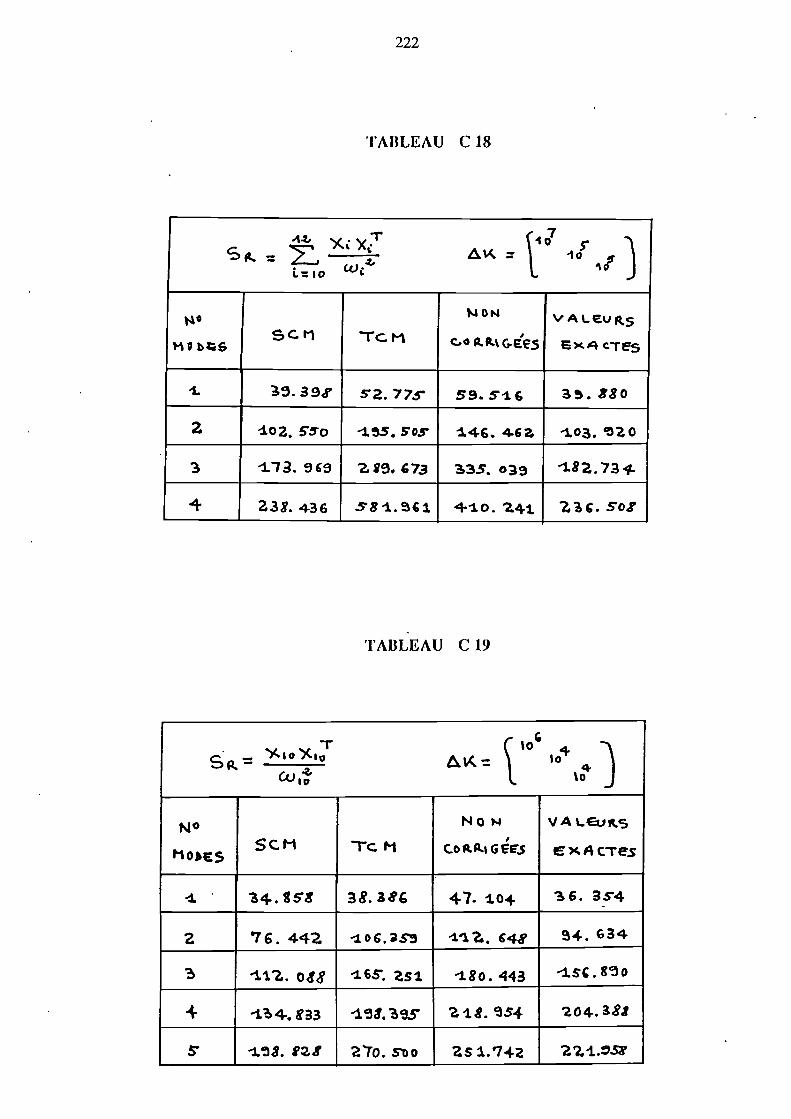
222
TABLEAU C18
TABLEAU C 19
z.,o . -
-lo=
1=10
M U5C11
4ON
cZ.OP.R.tGÚ5
VALug5EcTe
1. .398 g2.75- 59.51G 3. S0z iO 5o -t5. Sos 14G. 4-CZ -1.03. 20
3 -i1. 96 2.SS. G73 ?35. 039 -1S2.734.
4 2.38.436 S81.91 410.241 23c.S°A'
Io 41to jcÁ)-Z.
Mo)E5SC1 Tc M
NON
CoP.P.iGE$
V4EuEcAC-res
i. a. gg 38.a 47. iO4 6. 354
2 '76 442 ioc.;s 11?. 94. G34
- -t12. o i65. -180.443 -isC.So
4 -t4g33 ,3eg z1.q.S4 204.381
3 -i.3. tS 2To. so ZSI.'142
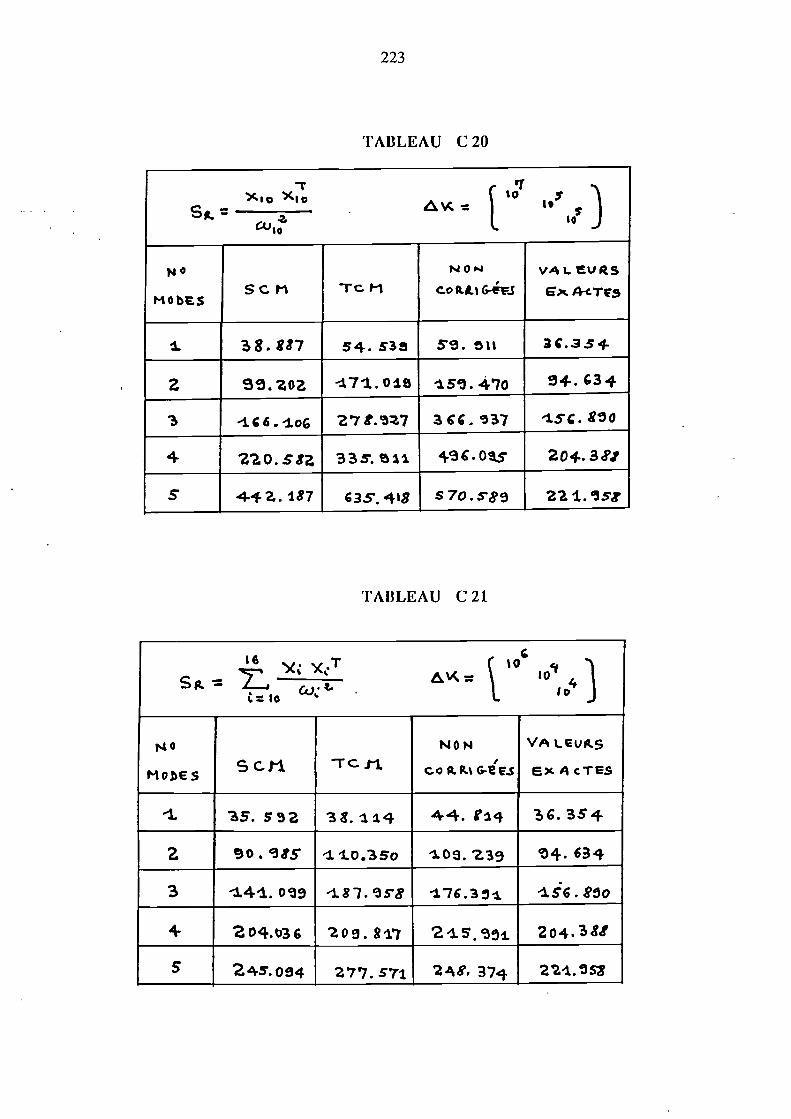
223
TABLEAU C 20
TABLEAU C 21
.
I,,[0Ia-)
MObt5SC. P% 1C 1
NO'4
OP.&i6-ItSV4L'JRS
t 8.U7 54.S3 5S.L% 3.3S4-
Z 9.zoz -t71.Ot8 5ci.4'7o S4..G34
-tC6.-ioG 2'7t.7 3CC.37
4 'Z20.SS 33st 49.05 2O4.38
5 4fZ. 187 G35413 S7O.5 22t.5Z
16'il '. o 10 -, jIo
Mo1EsTcJ-t
NON
coR.P.G-EE.s
VALEVR$
Ex4crES
-t 3&14 44.ft4 G.3S4
Z tO.35o ß23 4. 634
3 t410 -t87.s-8 -176.3
4 204.t36 20s.S1.'7 2'i5.t 204.3U
g 245.094 7'.71 24S. 374
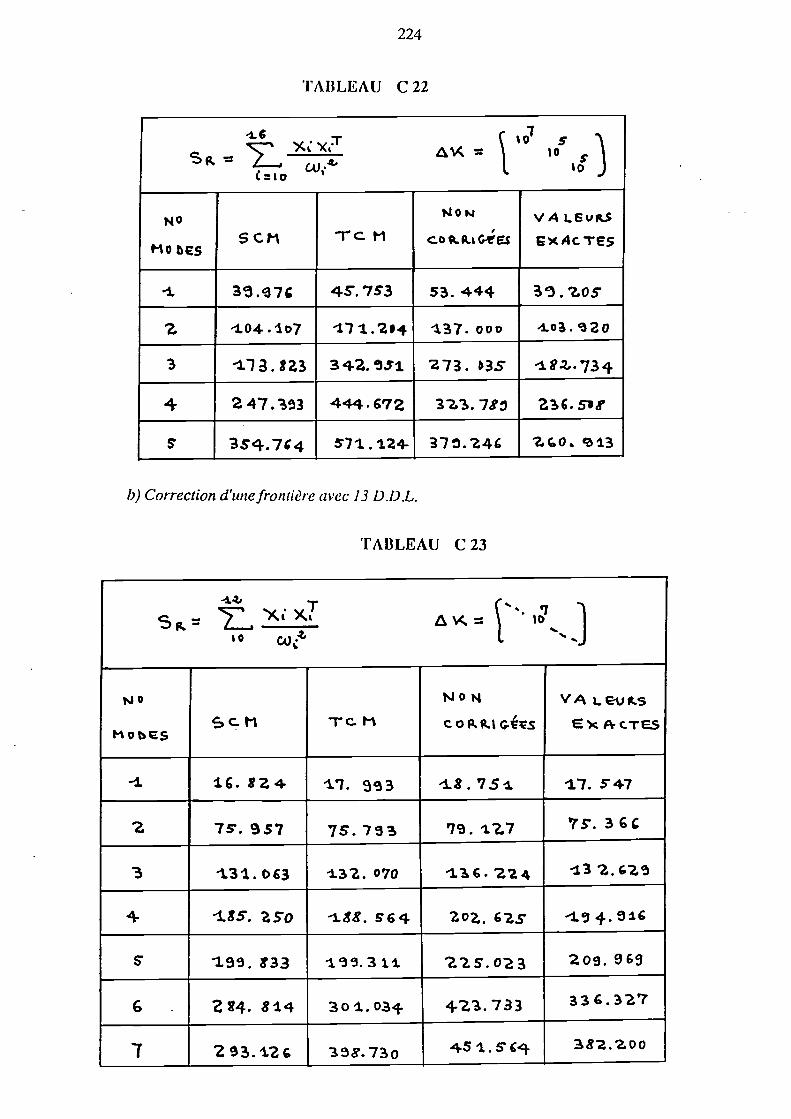
224
TABLEAU C 22
b) Correction d'une fro,ztière avec 13 D.D.L.
TABLEAU C23
4.6%0V -'
o J
NO
Mo b5CM -rc ti
WON
co.R.iG-EjV4LEU.S
X4CTES
i, 3.'a7c 4SY153 53.444 3'.tog2 -tO4.1D7 i71.24 &37.00 4.03.320
3 -t13.S23 342.31. Z73. D35 -i..t.734
4 247.3 444.G72 32.3.7t.i ?.?6.5Jt
5' 3S4.74 71.12# 37L24 Zr.O i3
Sf.= «.%T ]%.
O
wo
M u bESTC.M
WON
coP,L%cS E)AcTES
-t i.8Z4 ?1. 4.S.75i. 17.547
2 75957 7S79 '79.12.7 75.3GC
- -t3.oG3 -t32. 070 1.. 13
4 -jZS.2go 2o.6ag
s. 193. 833 1'9.3t1. 22S.O3 209. 9G9
G 24. 814 3O..Of 42.73 33G 327
-r 23.1.2 358.730 45t.5'C.iq. 82.2O0
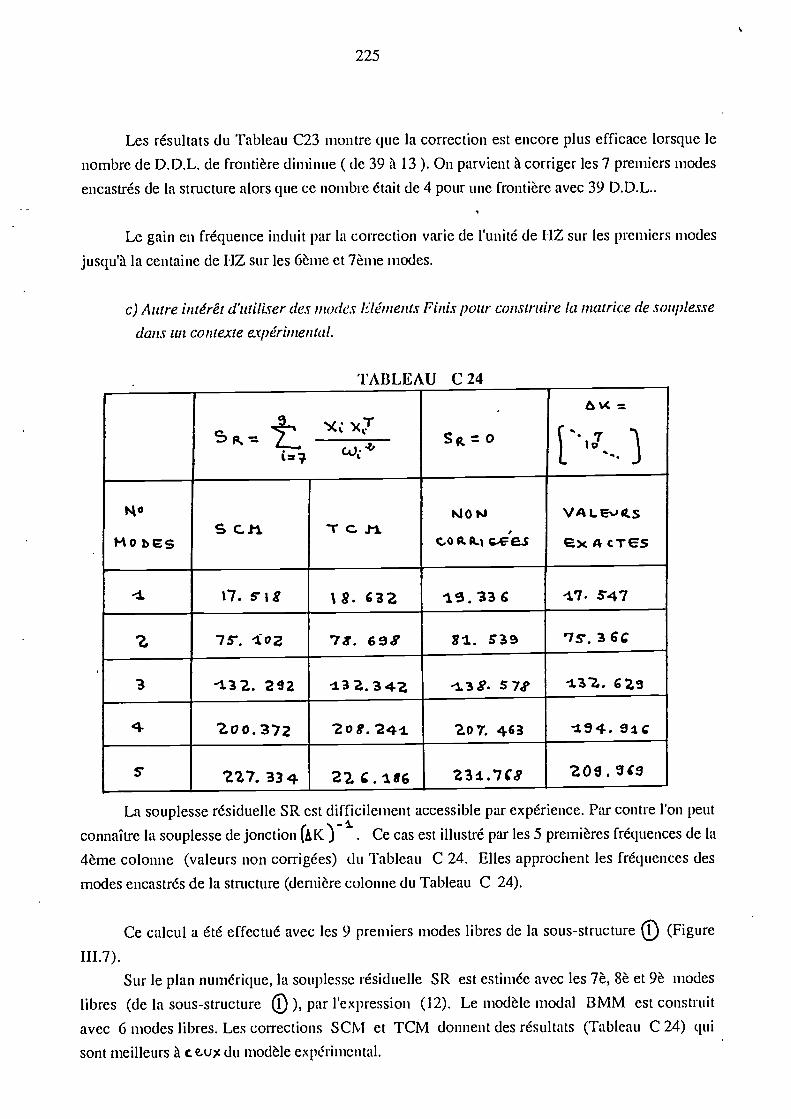
225
Les résultats du Tableau C23 montre que la correction est encore plus efficace lorsque le
nombre de D.D.L. de frontière diminue ( de 39 13 ). On parvient à corriger les 7 premiers modes
encastrés de la structure alors que ce nombre était de 4 pour une frontière avec 39 D.D.L..
Le gain en fréquence induit par la correction varie de l'unité de 1-IZ sur les premiers modes
jusqu'à la centaine de HZ sur les 6ème et 7ème modes.
c) Autre i,ztérêt d'utiliser (les modes Eléinents Finis pour construire la matrice de souplesse
clans un contexte expérimental.
'I'ABLEAU C 24
La souplesse résiduelle SR est difficilement accessible par expérience. Par contre l'on peut
connaître la souplesse de jonction 1KYt. Ce cas est illustré par les 5 premières fréquences de la
4ème colonne (valeurs non corrigées) du Tableau C 24. Elles approchent les fréquences des
modes encastrés de la structure (dernière colonne du Tableau C 24).
Ce calcul a été effectué avec les 9 premiers modes libres de la sous-structure (Figure
111.7).
Sur le plan numérique, la souplesse résiduelle SR est estimée avec les 7è, 8è et 9è modes
libres (de la sous-structure ® ), par l'expression (12). Le modèle modal BMM est construitavec 6 modes libres. Les corrections SCM et TCM donnent des résultats (Tableau C 24) qui
sont meilleurs à c e.0 du modèle expérimental.
S«oL.
MObSScii.
WON
O%ÇEE.S
VALEsGKACTES
-i ti. 51S 9. 63 iß.33C t'i. .547
Z io 7:. g si. s '7g 6C
3 t32. 22 132.342 i.S. 578 -1.3?.. G2
4 2oo.3 208.241. 207.463
5 227.334 22c.i 231."ZCS
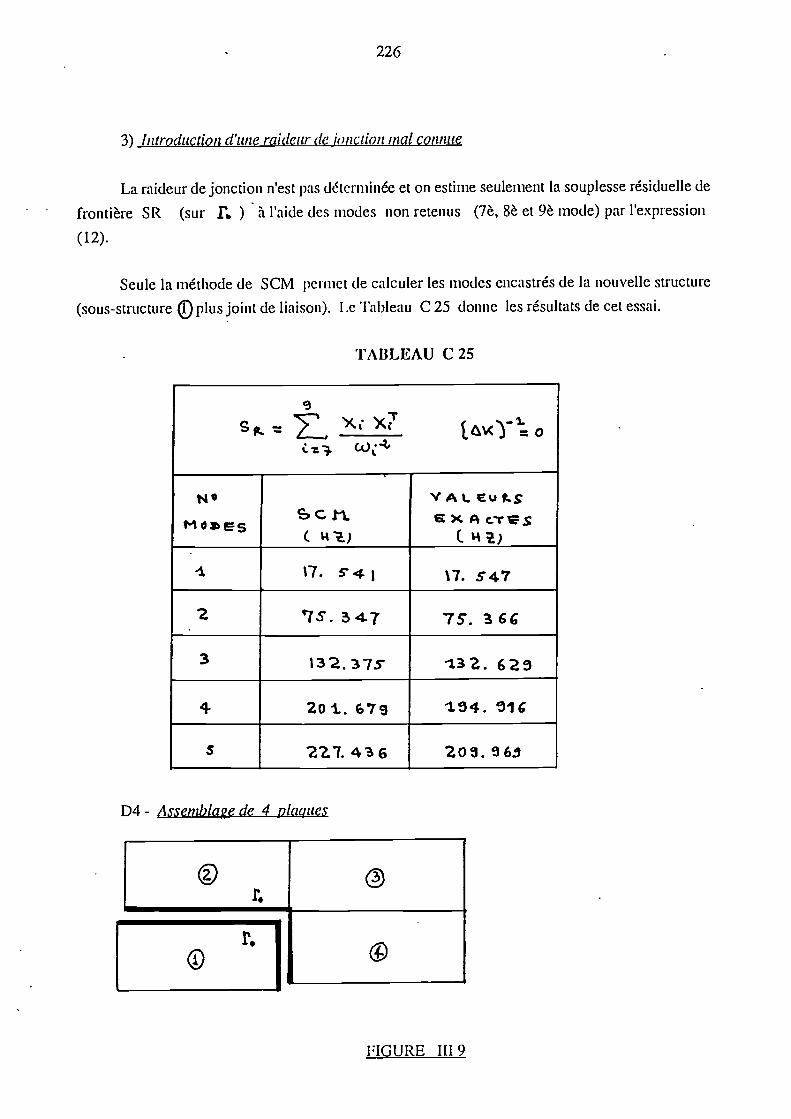
D4 - ,4sse,nblage de 4 plaques
r.
r.
226
3) Introduction d'une raideur dc JOflC11OZ mal con,zue
La raideur de jonction n'est pas déterminée et on estime seulement la souplesse résiduelle de
frontière SR (sur Ib ) à l'aide des modes non retenus (7è, 8è et 9è mode) par l'expression
(12).
Seule la méthode de SCM permet de calculer les modes encastrés de la nouvelle sLructure
(sous-structure plus joint de liaison). Le Tableau C 25 donne les résultats de cet essai.
TABLEAU C 25
FIGURE 1119
W
N',cj1.
VALEut.gXACTES
t7. 4I 7. 547
2 '1S.47 7g
132.375 132. 62S
4 20t. 67 14. 1CS 2Vl.436
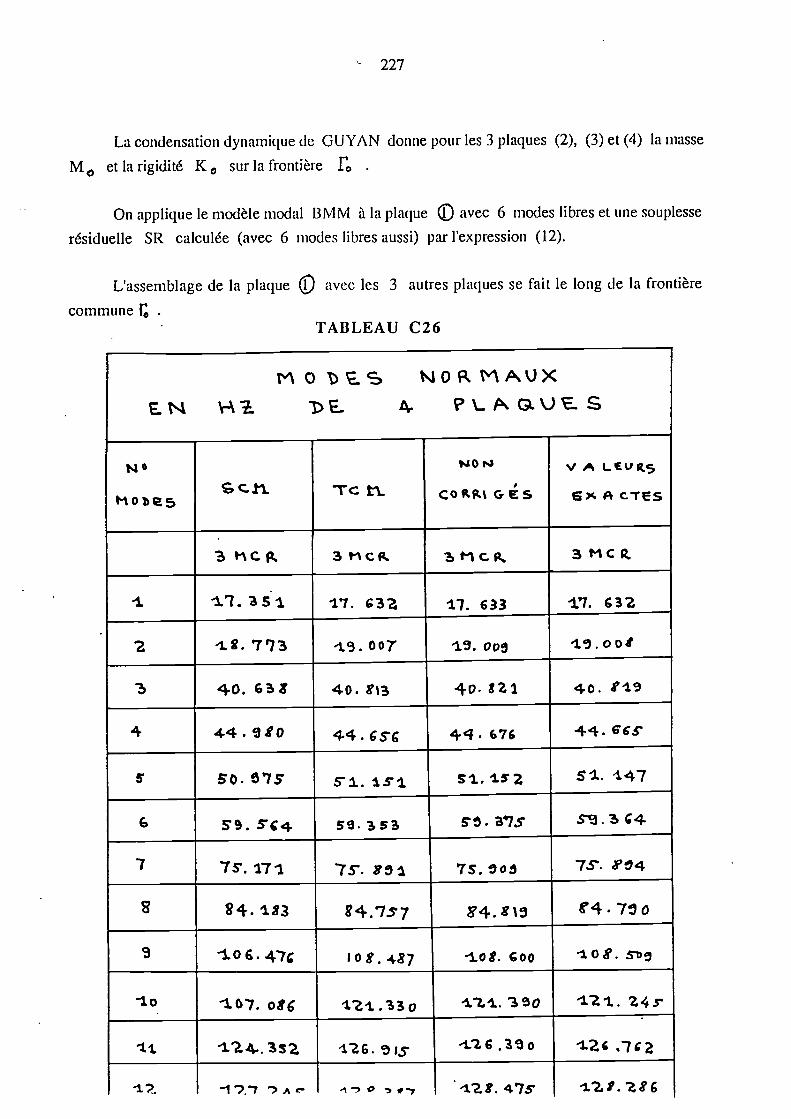
227
La condensation dynamique de GUYAN donne pour les 3 plaques (2), (3) et (4) la masse
M0 et la rigidité K0 sur la frontière f'0
On applique le modèle modal 13MM Ia plaque avec 6 modes libres et une souplesse
résiduelle SR calculée (avec 6 modes libres aussi) par l'expression (12).
L'assemblage de la plaque avec les 3 autres plaques se fait le long de la frontière
communeTABLEAU C26
MOB t4ORM,6bUXN \\. . )S
N'TC t.
WOPJ
s
CO% G-ES
VALU.5c A CTS
,Mc.p. 3MCR.
-t 1.1. C3 7. 633 t'i. 32
2 tS7'73 -13.00T 1.op
3 40. 6Z 40. 4o. 8Z1 40. ¿19
4 44.9SO 44.g 4q.676 44.C.c
6 S'9.5C4 5ß.353 s.a1s
-r 75i71 7S.o 7.5.84
S41$7
e 1.O6.47c IOS.437 tOS.Coo 1Ot.Sb
lo 1c-j. ogG 2-t.33o -t21SO -11.. 24s
lt 1.24..32 126.91y 1.26
'17 )- -iO ia:. 4'iS
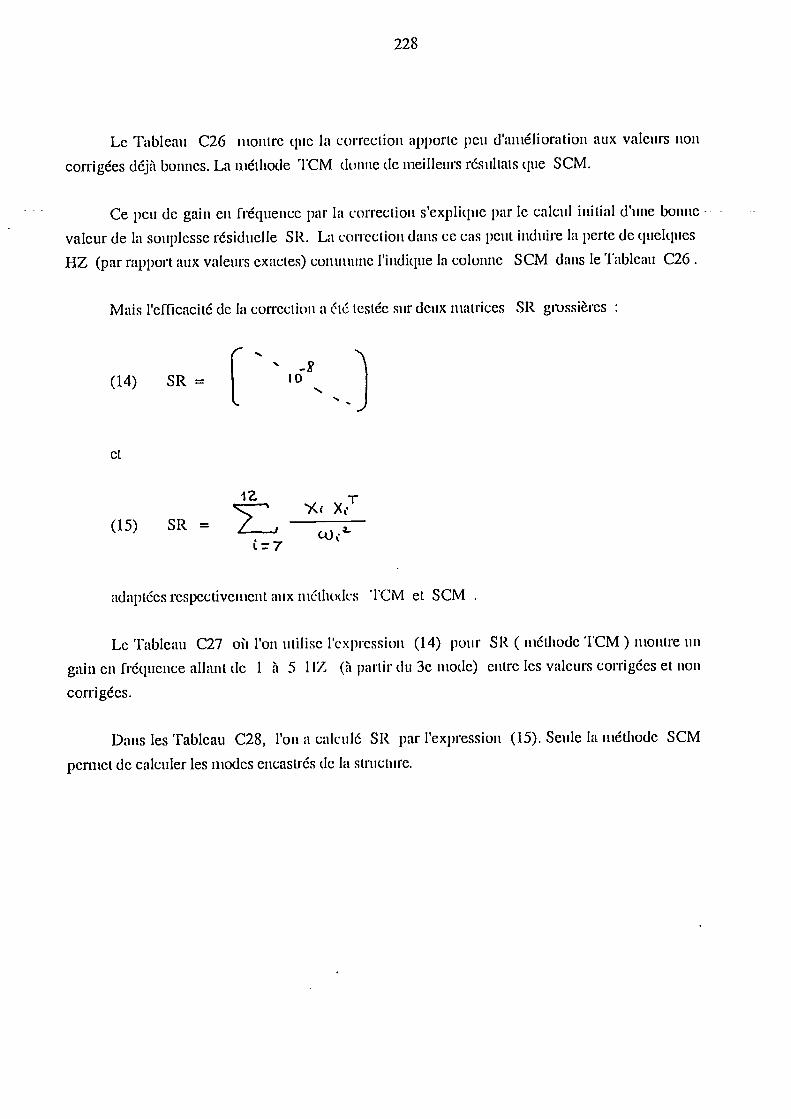
Le Tableau C26 montre que lit correction pporte PCU d'amélioration aux valeurs non
corrigées déjà bonnes. La méthode 'I'CM donne de meilleurs résultats que SCM.
Ce peu de gain en fréquence par la correction s'explique par le calcul initial d'une bonne -
valeur de la souplesse résiduelle SR. La correction dans ce cas peut induire la perte de quelqties
HZ (par rapport aux valeurs exactes) commune l'indique la colonne SCM dans le Tableau C26
Mais l'efficacité dc la correction a été estée sur deux matrices SR grossières
SR =
et
SR =
t..'.'ID
-S
la T)(c/ ' Ck)
228
adaptées respectivement aux méthodes 'I'CM et SCM
Le Tableau C27 où l'omi utilise l'expression (14) pour SR ( méthode TCM ) montre un
gain en fréquence allant de i à 5 lIZ (i partir du 3e mode) entre les valeurs corrigées et non
corrigées.
Dans les Tableau C28, l'omi a calculé SR par l'expression (15). Seule la méthode SCM
permet de calculer les modes encastrés de la structure.
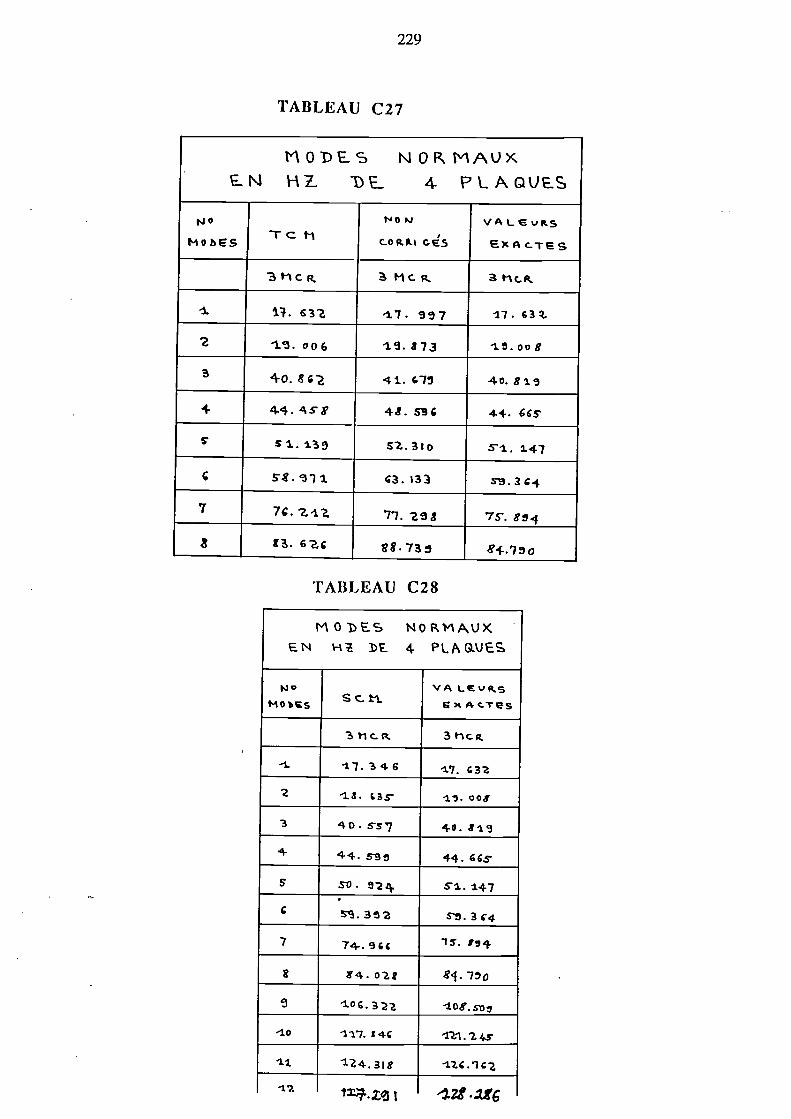
229
TABLEAU C27
TABLEAU C28
\ODES NORMAU)EN 't-2 DE 4 P\AQUES
t-iObESrct-
OJ
C.OR.&%C5 EXAc..1-s
-i . 63 -i7. 7 17. 53%
2 -i.e. oc,
3 4t.'14 44. AS'S 4e!. 5G 44. 6ES'
s St. 139 52.310 S1.. t47
C 3.i33 S9.3C4
I 7C.2-t?. 75'.Z54
13. 6?.c
MO1S WOR1Ai)(EN H IE 4 PLpauE
MObES S.tt3tic.. 3ticR.
-t 1'7.'34ß 7. G32
1.8. 1. 00g
4o. ss'7 40. l'?&)
4 44.s-g 44.G6
S so. 51.147
S.3c4'7 74.3s 15.
9 1.oG.32
-1O 17.Z4{ fl-1.24r
1.1. '1Z4.312
- 1Z.''ntt 1PiVr
231
CONCLUSION
I PROBLEME INITIAL
Les rnthodes de synthèse modale dont le fondement repose sur l'utilisation des modes
normaux d'organes mécaniques simples issus du calcul ou de 1'exprience, permettent de
prévoir le comportement dynamique d'assemblage de structures complexes.
Cette réduction du nombre de degrès de liberté caractérisant le système rend la synthèse
modale efficace parmi les techniques utilisées en dynamique des structures.
Cependant, le problème délidat lié à l'inévitable troncature modale induit une pénalisation
de la qualité de la réponse vibratoire cherchée. Il s'avère alors nécessaire d'étudier finement les
interfaces de liaison entre sous-structures pour contourner cette difficulté. On a donc introduit
les caractéristiques résiduelles de frontière qui apportent un assouplissement du système
rigidifié par la troncature modale. Mais la connaissance de ces termes est imprécise par le calcul
et difficile par expérience. on est en effet conduit sur le plan expérimental à une détermination
très imprécise de la fléxibilité résiduelle par lissage de courbe en formulation déplacement (ou
modes libres), et à des mesures impossibles de rotations et de couples pennettant d'accéder à la
matrice de raideur statique lorsqu'on se trouve en formulation force (ou modes encastrés).
Cette difficulté a été levée grâce aux modes dits de branche introduits parJEZEQUEL il y a une dizaine d'années, et rapportés en référence (R12). Ces modes debranche sont des modes normaux d'une structure lorsqu'on lui impose un chargementd'impédance connue le long de ses frontières. Ils présentent l'avantage de permettre desmesures expérimentales se situant entre les deux états limites de frontière encastrée et de
frontière libre. Les caractéristiques résiduelles de frontière deviennent ainsi accessibles par
expérience.
Les modes de branche se rattachent en fait aux problèmes intermédiaires deWEINSTEIN introduits en mathématiques au début de ce siècle, référence (Rl) et (R2).
Grâce à une formulation intégrale des problèmes de dynamique, les pulsations des structures
cherchées apparaissent comme des solutions des déterminants de WEINSTEIN qui intégrent
l'expression matricielle des caractéristiques résiduelles de frontière dans les contextes
numérique et expérimental.
Mais c'est LEUNG qui a d'abord fourni, référence (R32), un calcul explicite de la
flexibilité résiduelle à un ordre quelconque.
La prise en compte des caractéristiques de frontière a effectivement permis d'améliorer
les résultats de la synthèse modale et ceux d'autres techniques de la dynamique des structures
comme la condensation dynamique de GUYAN ou l'analyse de sensibilité. Ce sont nos
conclusions des chapitres un et deux.
Néanmoins, il n'existe pas d'études spécifiques sur le recalage des termesrésiduels de frontière afin d'améliorer l'efficacité des méthodes de
sous-structuration. Cette absence repose sans doute sur la difficulté de corriger descaractéristiques représentées par des matrices dans le contexte numérique, et qui impliquent
souvent un nombre de degrès de liberté relativement élevé.
232
233
Le but princiapi recherché dans ce travail consiste à proposer uneprocédure générale de recalage (les caractéristiques résiduelles de frontièrepour améliorer très nettement les résultats de dynamique des structures.
II CORRECTION DES INTERFACES DE LIAISON
Généralités
Il a d'abord été nécessaire d'introduire un modèle modal capable de prévoir la réponse
dynamique d'une structure avec des conditions aux limites quelconques dans le contextenumérique ou expérimental : B.M.M. Basic Modal Model. Celui-ci est ensuite corrigé et
amélioré.
Ce modèle modal est construit à partir des modes libres et de la souplesserésiduelle de frontière au premier ordre. On a en effet montré au chapitre un qu'il y apeu de différences dans les résultats de synthèse modale lorsqu'on utilise les termes résiduels
au premier et au second ordre. Cependant, l'ordre deux apporte une nette amélioration par
rapport à l'ordre un aux fréquences élevées.
Nous avons donc envisagé une correction au premier ordre et à bassesfréquences afin de compenser l'inéfficacité de l'ordre deux dans cette plage fréquentielle.
La correction
Dans le cadre du recalage de modèle numérique par rapport aux résultats expérimentaux,
deux méthodes de correction de la flexibilité résiduelle de frontière ont été proposées. La
technique utilisée consiste à définir une perturbation de la matrice de souplesse résiduelle. La
norme de celle-ci est ensuite minimisée en imposant des conditions d'orthogonalité et le respect
de certaines règles spectrales.
Cette correction repose sur les idées fondamentales suivantes:
L'équivalence algébrique des systèmes d'équations matricielles
L'équation matricielle de définition du modèle BMM permettant d'obtenir le spectre de la
structure avec des conditions aux limites quelconques n'est pas directement utilisée dans la
procédure de correction.
A ce système (A), l'on préfère un autre système (C), voir ANNEXE 6, adapté aux
équations énergétiques.
Le critère é,zergétique
La troncature modale induit en effet une perte d'énergie cinétique au système. Les
équations énergétiques (C) ne sont donc pas vérifiées. L'un des objectifs de la correction est de
faire retrouver cette propriété. Ce critère énergétique sera en fait un guide dans la procédure de
correction.
234
Les modes de branche
* L'idée fondamentale de la correction consiste à retrouver exactement les fréquences de
résonnance et d'approcher au mieux la forme des modes de branche de la structure chargée sur
ses interfaces.
* Ce passage par les modes de brauche constitue une voie originale que nous avons
choisie pour calculer avec précision les modes encastrés de la structure lorsqu'on est enformulation déplacement ou bien les modes libres dans le cas de la formulation force. En effet,
la correction des frontière avec plusieurs degrès de liberté par seulement quelques modes est un
problème indeterminé. L'utilisation de l'étape intermédiaire défini par les modes de branche a
pour intérêt majeur de faire converger les réultats vers les fréquences exactes des modes
normaux de la structure finale.
* Il est possible de perdre le caractère défini positif de la matrice de flexiblité résiduelle
SR en cours de correction, car celle-ci constitue une opération dangereuse. Si le caratère se
perd, il est possible de le sauvegarder en rajoutant des iiiodes de branches fictifscorrespondant à un calcul direct avec SR non corrigée. Les modes de branche fictifs sont des
vecteurs quelconques mais orthogonaux à ceux retenus pour réaliser la correction. Ils sont
introduits lors des premières étapes de la correction. Dans la pratique, les modes de branche
fictifs choisis sont les modes de branche non corrigés de rang supérieur à ceux qui interviennent
dans la correction.
La méthode de correction TC'M
La méthode de correction TCM (Total Correction Method) corrige la matrice desouplesse résiduelle SR globalement. La procédure utilisée nécessite l'inversion de cette matrice
SR. Comme celle-ci est généralement singulière, surtout dans le contexte expérimental, il s'est
avéré nécessaire d'introduire une seconde méthode de correction pour contourner cette délicate
difficulté.
La méthode de correction SCM
La méthode de correction SCM (Selectiv Correction Method) opère une correction
sélective des composantes de la matrice SR. Elle présente l'avantage majeur de ne pas nécessiter
l'inversion de SR. En ce sens, elle est complémentaire à la méthode TCM précédente.
Les matrices de souplesse résiduelle SR
On a regroupé les matrices SR susceptibles de représenter le contexte réel en trois types:
* Type I : SR définie positive et pleine (issue du calcul numérique)
* Type II: SR définie positive et diagonale (pour initialiser la méthode TCM)
* Type III: SR est pleine et faiblement singulière (estimation de SR dans un contexte
expérimental)
Ces matrices permettent de simuler une estimation grossière de SR ou au contarire sa
bonne connaissance par calcul ou par expérience.
235
3) Utilisation du modèle modal HMM et des méthodes de correction TCM et SCÏV
Conditions liées ci la procédure de correction
Le respect de conditions liées au nombre des différents modes normaux utilisés est
nécessaire pour appliquer efficacement les méthodes de correction TCM et SCM
Qualité des nodcs de branche
Il est intéressant de réaliser la correction avec des modes de branche (lui se situent dans la
même zone fréquencielle que celle des modes normaux cherchés.
Influence du nombre P (le DDL de frontière
La synthèse modale est réalisée avec 6 à 12 modes généralement lorsque l'on tientcompte compte des caractéristiques résiduelles de frontière. Une interface de raccordement est
dite alors à faible nombre de DDL si P est aux environs de 12. Dans le cas où P dépasse la
vingtaine, la frontière considérée est à grand nombre de DDL.
Même siles procédures de correction se sont révélées très efficaces en général, elles sont
d'autant meilleures que P n'est pas trop élevé.
III RESULTATS OBTENUS
Oualité des méthodes de synthèse modale TCM et SCM
Le modèle modal HMM proposé a débouché sur deux méthodes de synthèse modale
TCM et SCM. Elles se sont avérées très efficaces dans le recalage des modes de branche,
premier test de la qualité des procédures de correction. Celle-ci a permis en effet de retrouver
exactement les fréquences des modes (le branches introduits, d'approcher au mieux leurs
défonées modales et de recaler parfaitement les réponses temporelles des structures étudiées.
Efficacité du modèle B M M pour des variations de conditions aux limitesquelconques
Le modèle modal BMM donne des réponses temporelles avec exactitude lorsque les
conditions aux limites sur les interfaces de raccordement varient de l'encastrement parfait à la
libération totale des frontières. Mais la synthèse modale directe basée sur les modes de branche
ne permet pas du tout de prendre en compte ces modifications structurales majeures. C'est un
intérêt de plus du modèle BMM et des méthodes de correction TCM et SCM.
Structures avec joints aux interfaces de liaison
La technique d'utilisation des matrices de raideur AK associées à des déplacements
nodaux le long de la frontière de raccordement permet de traduire la souplesse de jonction
AK induite par les sous- structures adjacentes. Il est également intéressant d'introduire la
souplesse résiduelle SR à l'interface , d'où la souplesse résultante S = SR + AK
236
Selon la qualité de la connaissance de chacun des termes SR et AK, on a pu simuler
plusieurs cas réels de structures munies d'organes élastiques déterminés ou mal connus aux
interfaces de liaison. De nombreux tests ont mis en valeur l'efficacité des méthodes de synthèse
modale TCM et SCM.
Supériorité du modèle HMM corrigé au modèle expérimental
- Dans le cas de sous-structures liées par des raideurs de jonction AK connues -expérimentalement, il est possible de réaliser la synthèse modale à l'aide des n modes dont on
dispose. C'est la configuration expérimentale où l'on ignore la souplesse résiduelle SR de
frontière.Il est néanmoins judicieux de se servir autrement de ces n modes : n = N + L où L «N.
En effet, l'on peut estimer SR conformément aux méthodes de corrections (matrice de type
III). Le modèle BMM est alors construit avec N modes seulement. La correction du modèle
BMM donne alors des résultats meilleurs à ceux de la configuration expérimentale.
Assemblage de sous-structures
Les assemblages de sous-structures conformément aux techniques de BENFIELD et
HRUDA sont améliorés par le modèle HMM corrigé même si l'on itroduit des matrices de
flexibilité de frontière SR estimées gróssièrement par le calcitE ou par l'expérience.
IV CONCLUSION
La contribution la plus originale de ce travail repose sur la procédure générale de recalage
des caractéristiques résiduelles de frontière qui a été proposée. Elle a permis d'améliorer
considérablemnt les résultats de synthèse modale et est applicable dans le contexte numérique
ou expérimental.
Même si les méthodes proposées ont été construites dans le cadre élastique etconservatif, des extensions à des structures complexes, amorties ou comportant des frontières
non linéaires sollt paifaitement envisageables.
BIBLIOGRAPHIE
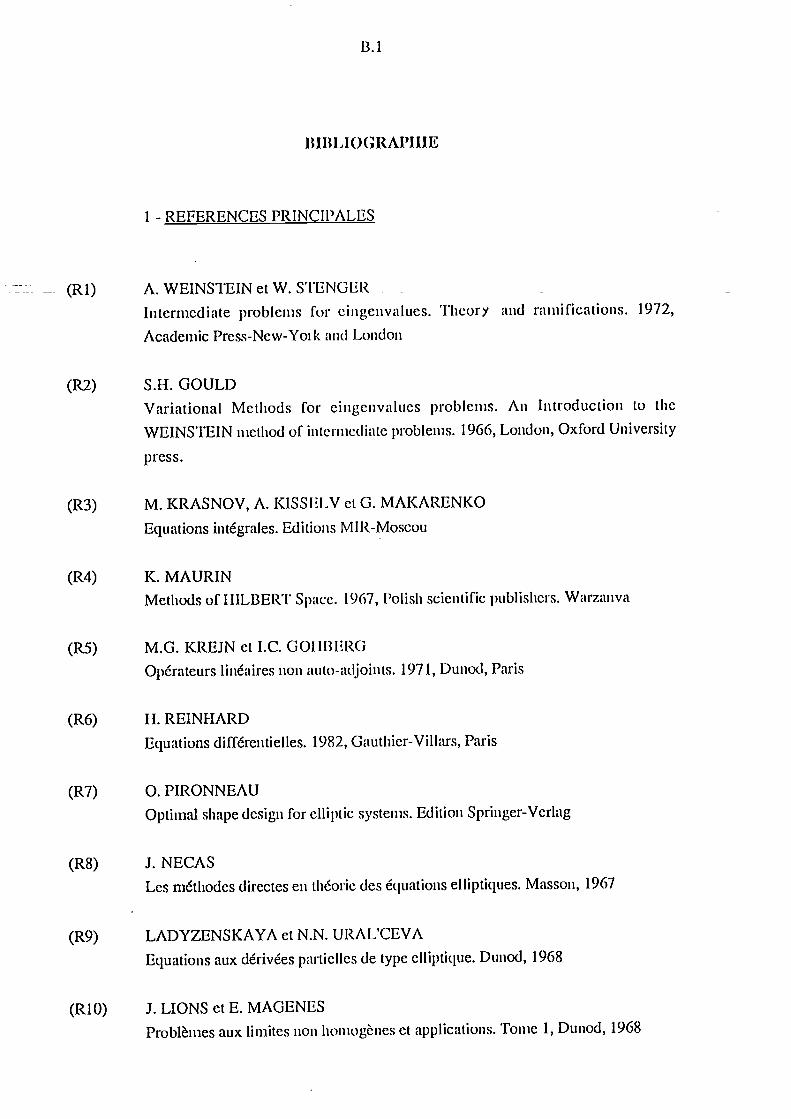
B. i
BIBLIOGRAPHIE
i - REFERENCES PRINCII'ALES
(Rl) A. WEINSTEIN et W. STENGERIntermediate problems for ei n gdnvalues. Theory and ramifications. 1972,Academic Press-New-Yot k and London
S.H. GOULDVariational Methods for cingenvalues problems. An Introduction to theWEINSTEIN method of intermediate problems. 1966, London, Oxford University
press.
M. KRASNOV, A. KISSELV et G. MAKARENKO
Equations intégrales. Edition s Ml R-Moscou
K. MAURINMethods of IIILBERT Space. 1967, Polish scientific publishers. Warzanva
M.G. KREJN et J.C. 001 IB ERG
Opérateurs linéaires non auto-adjoints. 1971, Dunod, Paris
II. REINHARDEquations différentielles. 1982, Gauthier-Villars, Paris
O. PIRONNEAUOptimal shape design for elliptic systems. Edition Springer-Verlag
J. NECASLes méthodes directes en théorie des équations elliptiques. Masson, 1967
LADYZENSKAYA et N.N. URAL'CEVA
Equations aux dérivées partielles de type elliptique. Dunod, 1968
(RiO) J. LIONS et E. MAGENESProblèmes aux limites non homogènes et applications. Tome 1, Dunod, 1968
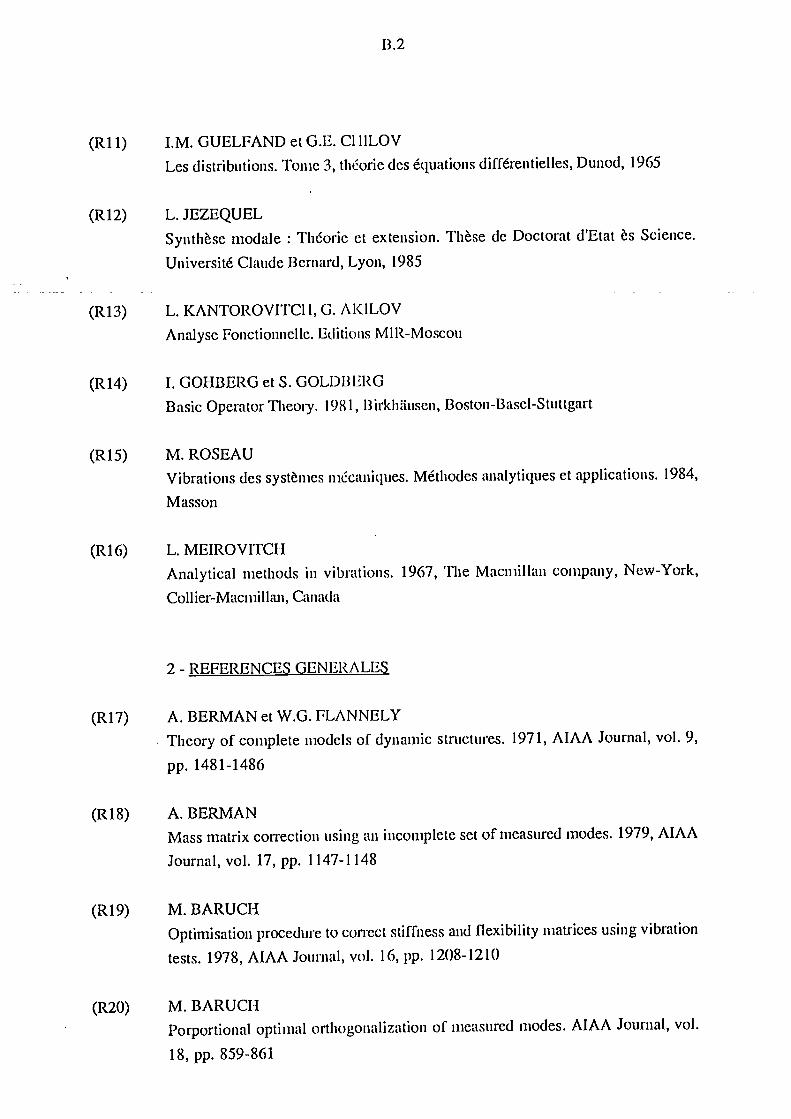
13.2
(Rl 1) I.M. GUELFAND et G.E. Cl IILOV
Les distributions. Tome 3, théorie des équations différentielles, Dunod, 1965
L. JEZEQUEL
Synthèse modale Théorie et extension. Thèse de Doctorat d'Etat ès Science.
Université Claude Bernard, Lyon, 1985
L. KANTOROVITCII, G. AKILOV
Analyse Fonctionnelle. Ed ilions MI R-Moscou
I. GOHBERG et S. GOLDBERG
Basic Operator Theoiy. 198 1, lirkhiiusen, Boston-Basel-Stuttgart
M. ROSEAUVibrations des systèmes mécaniques. Méthodes analytiques et applications. 1984,
Masson
L. MEIROV1TCIIAnalytical methods in vibrations. 1967, The Macmillan company, New-York,
Collier-Macmillan, Canada
2- REFERENCES GENERALES
A. BERMAN et W.G. FLANNELY
Theory of complete models of dynamic structures. 1971, AIAA Journal, vol. 9,
pp. 1481-1486
A. BERMANMass matrix correction using an incomplete set of measured modes. 1979, AIAA
Journal, vol. F7,pp. 1147-1148
M. BARUCHOptimisation procedure to correct stiffness and flexibility matrices using vibration
tests. 1978, AIAA Journal, voI. 16, pp. 1208-1210
M. BARUCHPorportional optimal orthogonalization of measured modes. AIAA Journal, vol.
18, pp. 859-861
B .3
A.M.KABEStiffness matrix a(ljtiSttfleIÌt using mode data. 1985, AIAA Journal, vol. 29, pp.
143 1-1436
L. JEZEQUEL et S. 'ICI IERE
Contrôle ol)tilnal (les caractéristiques résiduelles utilisées en synthèse modale.
8èiue Congrès Français de Mécanique. Nantes, SCj)leIflbFe 1987, pp. 160-161
L. JEZEQUEL
A hybrid method of modal syiltilesis using vibration lests. 1985, Journal of Sound
and Vibration, vol. 100, pp. 19 1 -2 10
L. JEZEQUEL et S. 'l'CI 1ERl.
Correction of residual I lcx ihi li ty from vibration lests
International Modal Analysis Seminar. LEUVEN, Louvain September 1987
S. TCIIERECouplage dynamique des structures le long d'interfaces continues. Mémoired'Ingénicui-, Ecole Nationale des Travaux Publics de l'Etai. Lyon, 1983
S. 'l'CIIEREMéthodes hybrides de synthèse modale. Mémoire de Diplôme d'EtudeApprofondies. Universi té Claude Bernard, Lyon, 1984
L. MEIROVITCII et AL. I IALE
On the substructure synthesis method. 1981, AIAA Journal, vol. 19, pp. 940-947
L. MEIROVI'I'ClI et A.L I IALE
A procedure for imnj)roving discrete substructure representation in dynamicsynthesis. 1982, AIAA Journal, vol. 20, pp. 1123-1136
L. MEIROVITCII el A.L I IALE
A general procedure for improving substructures representation in dynamicsynthesis. 1982, Journal of Sound and Vibration, vol. 84, pp. 269-287
S. RUBINImproved component-mode representation for structural dynamic analysis. 1975,
AIAA Journal, vol. 1 3, pp. 995- 1006
B.4
Y.T. LEUNGAn accurate method of dynamic condensation in structural analysis. 1978,International Journal for Numerical Methods in Engineering, vol. 12, pp.
1705-17 15
Y. T. LEUNGAccelerated convergence of dynamic flexibility in series form. 1979, Engineering
structurés, vol. 1, pp. 203-206
Y. T. LEUNGAn accurate method of dynamic substructuring with simplified computation. 1979,
International Journal for Numerical Methods in Engineering, vol. 14, pp.
124 1-1256
Y.T. LEUNGAccelerated converging methods in structural response analysis. 1980,Proceedings Conference on Advanced Structural Dynamics, University of
Southampton, pp. 101-108
Y.T. LEUNGFast convergence modal analysis for continuous systems. 1983, Journal of Sound
and Vibration, vol. 87, pp. 449-467
J.A. BRANDON
Derivation of significance of second order modal sensivities. 1984, AIAA Journal,
vol. 22, PP. 723-724
L. JEZEQUELSynthèse de l'amortissement par sous-structuration expérimentale. 1978, Thèse de
Docteur Ingénieur, Université Claude Bernard, Lyon
L. JEZEQUEL et S. TCIIERE
Nouvelles méthodes de correction des caractéristiques résiduelles de frontière en
synthèse modale. Journées "choc et vibrations", Ecole Centrale de Lyon, 1988
T. ClIERRADI
Une méthode de sous-structuration dynamique avec interface de frottement. Thèse
de Docteur Ingénieur, 1985, Institut National des Sciences et Techniques
Nucléaires
B.5
N. KARCANIAS, C. GIANNAKO POULOS et M. hUBBARD
Almost zeros of a set of polynomials of , 1983, International Journal of
Control, vol. 38, pp. 1213-1238
R.W. DANIEL et B. KOUVARITAKIS
Analysis and design of linear multivariable feed back systems in the presence of
additive perturbations. I 9x4, International Journal of Control, voI. 39, pp.
55 1-580
W.L. EASTMAN et J.A. BOSS!
Design of linear quadratic regulators with assigned eingenstructure. 1984,International Journal of Control, vol 39, pp. 731-742
K. REINS CHKEGraph-theoretic characterization of fixed modes in centralized and decentralized
control. 1984, International Journal of Control, vol. 39, pp. 7 15-729
A. ARBEL et 0. RATI IAn iterative pole-placement algorithm. 1985, International Journal of Control, vol.
41, pp. 929-939
A. SIMPSONA newtonian procedure for the solutions of Ex. Ax.. 1982, Journal of Sound
an Vibration, vol. 82, pp. 161-l7()
A. SIMPSON
On the solution of S (.w) c. o by a newtonian procedure. 1984, Journal of
Sound and Vibration, vol. 97, pp. 153-164
N.S. SEHMIA newtonian procedure for the solution of the KRON characteristic value problem.
1985, Journal of Sound and Vibration, vol. 100, pp. 409-421
T.J. BRIDGES et L.N. VAS ERSTEIN
The local evaluation of the derivative of a determinant. 1986, Journal of
computational physics, vol. 65, pp. 107-119
B.6
B. DAWSON et M. DAVIES
The identity between the RAYLEIGII-KOIIN and NEWTON-RAPIISON
procedures and its application to the vibration analysis of single-junction braiiched
systems. 1979, Journal of Sound and Vibration, voI. 67, pp. 151-162
J. ONODA et R.T. JIAFEKA
An approach to structure/control simultaneous optimization for large flexible
spacecraft. 1987, AIAA Journal, vol. 25, pp. 1133-1138
X.Y. HUANG
Active Control of aerofoil flutter. 1987, AIAA Journal, vol. 25, pp. 1126-1132
J.K. BENNIGIIOF
Component Mode Iteration for frequency calculations. 1987, AIAA Journal, vol.
25, pp. 996-1002
I. GLADWELL et R. TI lOMAS
Stability properties of the NEWMARK, 1IOUBOLT and WILSON Methods.
1980, International Journal for Numerical and analytical methods in
Goniechanics, vol. 4, pp. 143-158
G. RYLAND et L. MEIROVITCII
Response of Vibrating systems with perturbed parameters. 1980, Journal of
guidance and control, vol. 3, pp. 298-303
P. VANHONACKER
Differential and difference sensitivities of natural frequencies and modes shapes of
mechanical structures. 1980, vol. 18, pp. 1511-1514
H.F. ADELMAN et R.T. I IAFI'KA
Sensivity analysis of discrete Structural systems. 1986, AIAA Journal, vol. 24,
pp. 823-832
R. REISS
Design derivatives of eingenvalues and eingenfunctions for self-adjoint distributed
parameter systems. 1986, AIAA Journal, vol. 24, pp. 1169-1172
11.7
B.P. WANG et W.D. I'ILKEYEingenvalue reanalysis of locally modified structures using a generalized
RAYLEIGH'S Method. 1986, AIAA Journal, vol. 24, PP. 983-990
M.P. KAMATOptimisation with frequency constraints-limitations. 1983, Journal of Sound and
Vibration, vol. 91, pp. 1310-1316
K. KIM, W.J. ANDERSON et R.E. SANDSTROMNonlinear inverse perturbation method in Dynamic analysis. 1983, AIAA Journal,
vol. 21, pp. 1310-1316
L. JEZEQUEL
Modal Synthesis of large structures with nonlinear joints from vibration tests.
1984, Proceedings of the 2nd International Conference on Recent Advances in
Structural Dynamics, vol. 2, pp. 28 1-295
J.O. HALLQUIST et W.W. PENOOn the specification of eiiigenvalues iii vibration systems. 1976, ASME Journal of
Applied Mechanics, voI. 98, pp. 359-360
C.J. I-10FF, M.M. BERN ITSASS, R.E. SANDS1'ROM et W.J. ANDERSON
Inverse perturbation method for structural redesign with frequency and mode
shape constraints. 1984, AIAA Journal, vol. 22, pp. 1304-1309
I. HIRAI et M. HASIIIWAKIDerivatives of eingenvectors of locally modified structures. 1977, International
Journal for numerical methods in engineering, vol. 11, Pp. 1769-1773
I. lIRAI etT. YOSIIIMURAOn a direct eingenvalue analysis for locally modified structures. 1973,
International Journal of numerical methods in engineering, vol. 6, pp. 44 1-456
P. PEDERSENSensivity analysis for problems of dynamic stability. 1983, International Journal
of Solids and Structures, vol. 19, p. 315-335
13.8
J.G. GIMENEZ et L.I. CARRASCOSA
An efficient method of experimental modal analysis of Mechanical systems. 1982,
Proceeding 1, International Modal Analysis Conference, Orlands, Florida, pp.
528-533
J.C. CHEN et J.A. GARBA
Analytical model improvement using modal test results. 1980, AIAA Journal, vol.
18, pp. 684-690
R.R. CRAIG et C.J. Cl lANG
Substructure coupling for Dynamic analysis and testing. NASA CR, 2781,
Februazy 1977
R.R. CRAIG et C.J. CL lANG
Free-Interface Methods of substructure coupling for dynamic analysis. 1976,
AIAA Journal, vol. 14, pp. 1133-1135
S. GOLDENBERG et M. ShAPIRO
A study of modal coupling piocedures for the space shuttle. NASA CR -2252
T.K. HASSELMAN
Study of modal coupling procedure for the shuttle : a matrix method for damping
synthesis. NASA CR - 112-253
A. WEINSTEIN
Bounds for eingenvalues and the method of intermediate problems. International
Conference on partial differential equations and contitnumn Mechanics, Madison,
Wisconsin, 1961
Ian GLADWELL and Ruth 'Il lOMAS
Stability Propertis of the NEWMARK, HOU BOLT and WILSON Methods
International Journal for numerical and analytical Methods iii Geomechanics,Vol 4,
pp 143-158.
L. JEZEQUEL
A method of damping synthesis from substructure test. Journal of Mechanical
Design ASME,Vol.102, 1980 p' 286-294.
IANNEXES
1.1
ANNEXE i
AUTRES RESULTATS
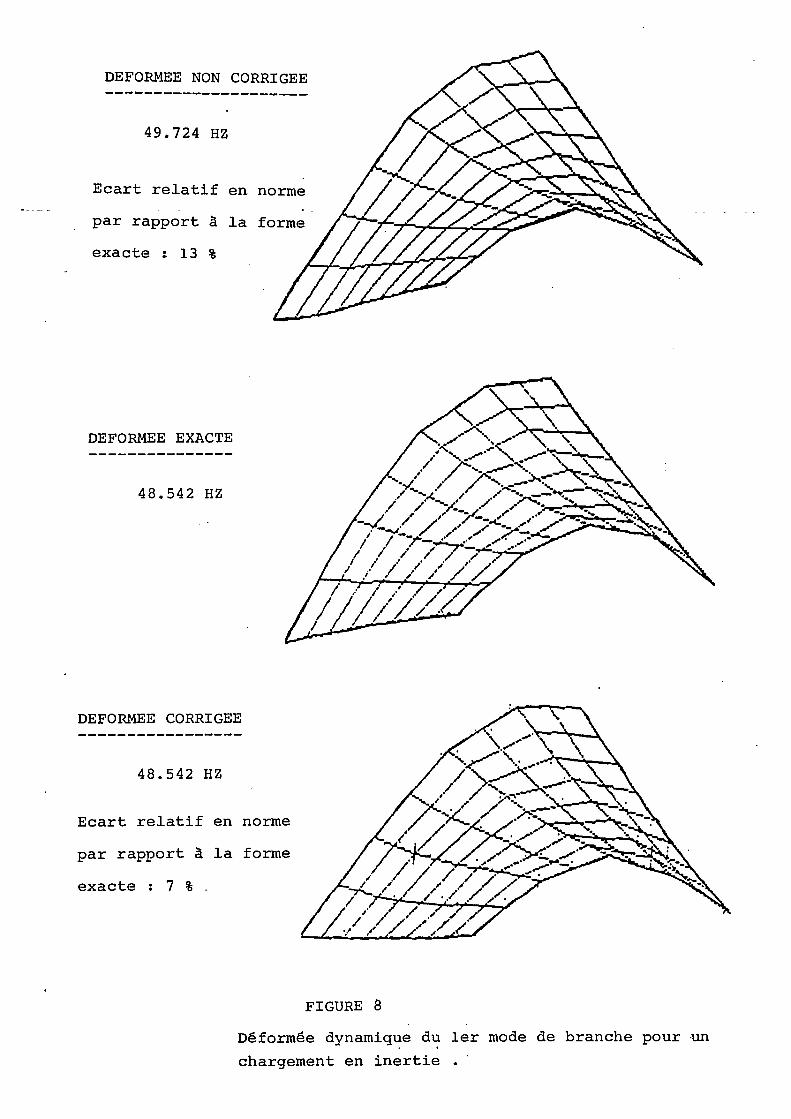
DEFORMEE NON CORRIGEE
49.724 HZ
Ecart relatif en norme
par rapport à la forme
exacte : 13 %
DEFORMEE EXACTE
48.542 HZ
DEFORMEE CORRIGEE
48.542 HZ
Ecart relatif en norme
par rapport à la forme
exacte : 7 %
FIGURE 8
Déformée dynamique du 1er mode de branche pour un
chargement en inertie
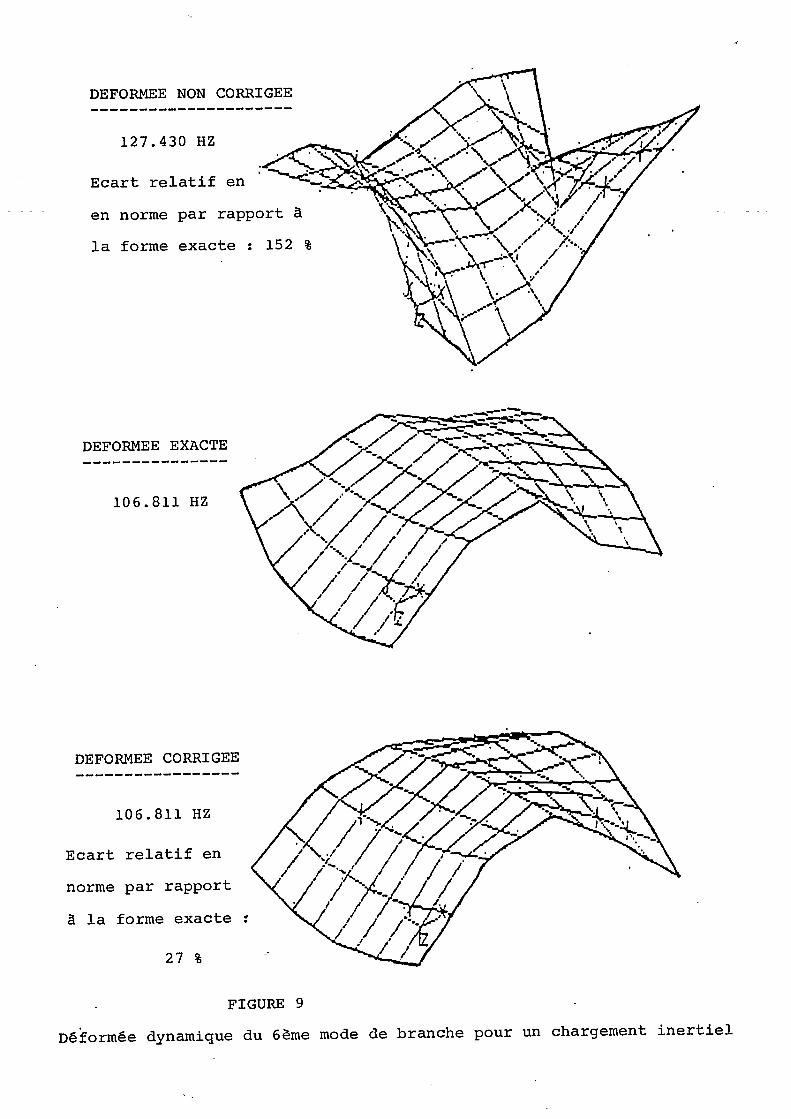
DEFORMEE NON CORRIGEE
127.430 HZ
Ecart relatif en
en norme par rapport à
la forme exacte : 152 %
DEFORMEE EXACTE
106.811 HZ
DEFORMEE CORRIGEE
106.811 HZ
Ecart relatif en
norme par rapport
à la forme exacte :
27 %
FIGURE 9
, z, ,-_ %.
\- \ ------,.----.
Déformée dynamique du 6ème mode de branche pour un chargement inertiel

2.1
ANNEXE 2
MATRICE DE PSEUDO-FLEXIBILITESOUPLESSE RESIDUELLE

2.2
On ne peut pas définir une matrice de souplesse statique dans le cas d'une structure libre
qui possède des modes de corps rigides. On utilise alors une procédure particulière pour
déterminer une matrice de pseudo-flexibilité.Soit O le vecteur déplacement dans la base des modes libres et rigides.
U = IXL) QL + (XR')QR
avec
UL = SXL QL , UR = [XR) QR
Où * XL et ÇQR) désignent respectivement la matrice modale des modes libres
et le vecteur de coordonnées modales leur correspondant.
* CX ) et (QR) désignent respectivement la matrice modale des modes de
corps rigides et le vecteur de coordonnées modales leur correspondant.
L'on suppose que les modes élastiques et rigides Sont normés par rapport à la matrice
discrète [M de la structure.Le mouvement des modes rigides s'écrit donc:
(i QR (XR)TF
où F est la force d'excitation appliquée à la structure.
On en déduit l'expression des forces d'inertie:
F1 = - (M iJ, = - [M] (XR] R = - (M)(XR) LkRTF
La structure est donc soumise au système des forces en équilibre F + F:E.:
F + F = ([I) - (M) ÇXR] (XRT) F = (A)F
où
[K) = (I) - (M ÇXR') ( XRT
permet de filtrer les modes de corps rigides.
Si la structure possède R modes rigides, on bloque R degrés de liberté pour la
rendre isostatique. On définit alors une matrice (i3) à partir de la matrice de flexibilité
isostatique à laquelle on ajoute R colonnes et R lignes nulles, correspondant aux degrés
de liberté bloqués.
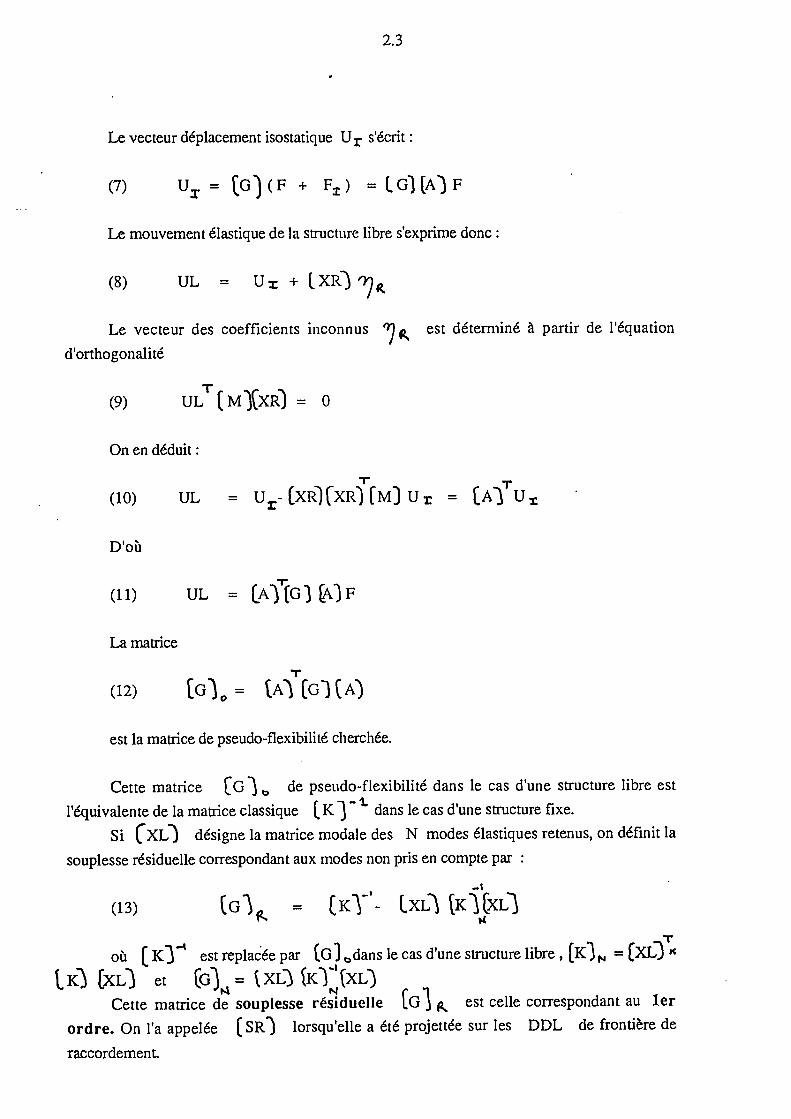
2.3
Le vecteur déplacement isostatique Ur s'écrit:
U. = G) (F + F) L G) [A) F
Le mouvement élastique de la structure libre s'exprime donc:
UL U +
Le vecteur des coefficients inconnus est déterminé à partir de l'équation
d'orthogonalité
TUL [M)ÇXR) = o
On en déduit:
UL = Ut- (XR)ÇXR) [M) Ut = [A u
D'où
UL = [AÇG) )F
La matrice
{G)0 = A[GT)ÇA)
est la matrice de pseudo-flexibilité cherchée.
Cette matrice [G 3 , de pseudo-flexibilité dans le cas d'une structure libre est
l'équivalente de la matrice classique 1K )- dans le cas d'une structure fixe.
Si ÇXL) désigne la matrice modale des N modes élastiques retenus, on définit la
souplesse résiduelle correspondant aux modes non pris en compte par
= (KV- LXL K\[XL1\
structure libre, [K) ., =
est celle correspondant au 1ersur les DDL de frontière de
où [KY est replacée par (o] bdans le cas d'une
K (XLj) et (G = S. XLT. SKT'(XL)Cette matrice de souplesse résiduelle [G
ordre. On l'a appelée (SR) lorsqu'elle a été projettée
raccordement.
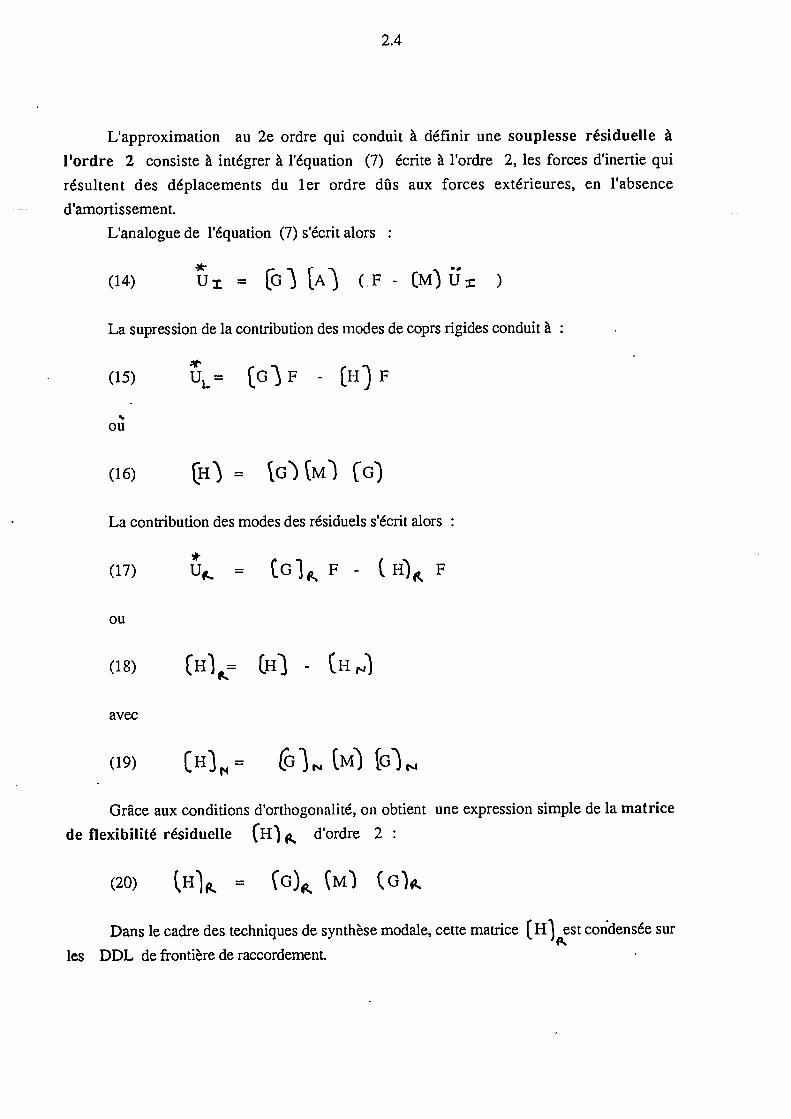
2.4
L'approximation au 2e ordre qui conduit à définir une souplesse résiduelle àl'ordre 2 consiste à intégrer à l'équation (7) écrite à l'ordre 2, les forces d'inertie qui
résultent des déplacements du 1er ordre dûs aux forces extérieures, en l'absenced'amortissement.
L'analogue de l'équation (7) s'écrit alors
= [G [A (.F - CM)1.íz )
La supression de la contribution des modes de coprs rigides conduit à
*UL= 1G F - [FI) F
ou
= G)M) ÇG)
La contribution des modes des résiduels s'écrit alors
= F - (H F
ou
(HL= [H) - (H)
avec
CH)N = CGI.. [M) [G.,
Grâce aux conditions d'orthogonalité, on obtient une expression simple de la matrice
de flexibilité résiduelle (Hl d'ordre 2
= ÇG) ÇM (GIE.
Dans le cadre des techniques de synthèse modale, cette matrice (H) est cordensée sur
les DDL de frontière de raccordement.
3.1
ANNEXE 3
SOUILESSE RESIDUELLE
Les matrices de souplesse résiduelles sont obtenues de deux façons différentes en
formulations continue et discrète. Les résultats sont rigoureusement identiques dans les deux
cas même siles expressions analytiques changent.
Formulation continue
Les formules (1.310 a) et (1.310 b) donnent à l'ordre 2N et 2N + 1, les souplesses
résiduelles suivantes:
(1)
(2)
(-a.w)
Sz (2N4%)
Dans le contexte numérique où l'on dispose de matrices de masses et de raideur, il est
possible de s'iniplifier l'écriture des expression (1) et (2) pour retrouver celles fournies par la
formulation discrète ci-après.
Formulation discrète
Le calcul par Eléments Finis permet de diposer d'une matrice K de rigidité et d'une
matrice M de masse.
Les vibrations libres d'une structure sont alors régies par l'équation dynamique classique
(3) 'Çx cNX =0On appelle alors S(w) matrice de souplesse dynamique définie par:
(4) SCc z
En écrivant S(w) sous la forme
(5)
3.2
-z., -i --2 -j
on utilise Fidentité remarquable
.2.. .-
pour obtenir le terme d'ordre N de S(w)
-I W _
N
3.3
L'ANNEXE 2 penriet de lever les difficultés liées à l'éventuelle singularité de la matrice
K.
On établit aisément
SN
où _ÇZ- est la matrice spectrale et la matrice modale.
Si l'on n'a accès qu'à m modes par le calcul ou par l'expérience, on appelle
la matrice de ces m modes et ¿5 ''
--ZN TS = fL c
La souplesse résiduelle SR à l'ordre N est alors définie par
= <SN- SN
4.1
ANNEXE 4
MASSE RESIDUELLE

4.2
Le calcul des matrices de masse résiduelle est similaire à celui des matrices de souplesse
résiduelle. On y distingue aussi deux formulations continue et discrète.
La formulation discrète part de l'équation dynamique écrite en force. La technique
d'identité remarquable utilisée en ANNEXE 3 est encore nécessaire ici. La démarche suivie est
identique.
Les expressions (1.369 a) et (1.369 b) donnent à l'ordre 2 N et 2N + i les termes de
masse résiduelle en formulation continúe.
(r) N
- (e(Ñ +')
Ç 3 D E
5.1
ANNEXE 5
EXTENSION DE LA METHODE DE SENSIBILITE

La méthode de sensibilité proposée peut être étendue à une modification structurale pluscomplexe où interviennent des perturbations en masse et en rigidité à la fois.
¿K =K-C) AM*
La correction de cette matrice 4 K introduite pour atténuer les effets de la troncature modalevérifie l'équation (11.66)
¿% = Cc -La matrice de flexibilité résiduelle SR correspond à un développement au premier ordre de
la participation des modes non retenus, ( Equation (11.64) ), mais doit être prise en compte dansl'influence des basses fréquences.
Comme la norme de la matrice ( t .. t t-j ) SR est petite devant 1, .A c peut êtreapproximée par la relation suivante
(3.a)
où
t=(3.b) P = - (Ari A + < S AM)
P3= thS'M1
Les modes du système perturbé sont solutions d'un problème spectral d'un ordre plus élevéque celui du système de base donné en équation (11.46).
(8) Y= f1ItCOQ
5.2
Les valeurs propres du système non perturbé correspondent aux pulsations W et lesvecteurs propres associés ont la forme:
(4) ç -n2--.;. 1.%F) _t.J-' (.t + XP %F)c
Ce problème peut être ramené à la forme standard suivante:
F O
(5) (H +H) yavec
= C(f(R+ AR)Y
(6) H=JL
r
o
R= Io /
o(7) ¿H =
-r T -rXPSXF FYF O rF
5.3
La méthode proposée consiste à employer l'analyse de sensibilité au système en utilisantdans le calcul seuls les N modes retenus.
Un développement au premier ordre conduit à une équation spectrale où les valeurs propresdu système perturbé vérifient
Cette équation tient compte du fait que les vecteurs Yk ne sont pas normés à l'unité. Enutilisant les relations (3.b) et, (6) et (7), on obtient en définitive:
+ (<- s(c4t& (.Mi- (A M £ K
+ As<. Ati) ± c4 Ml S(& ir1'Ç) 'XF&
6.1
ANNEXE 6
EQUIVALENCE ALGEBRIQUE DES EQUATIONS
DE CORRECTION
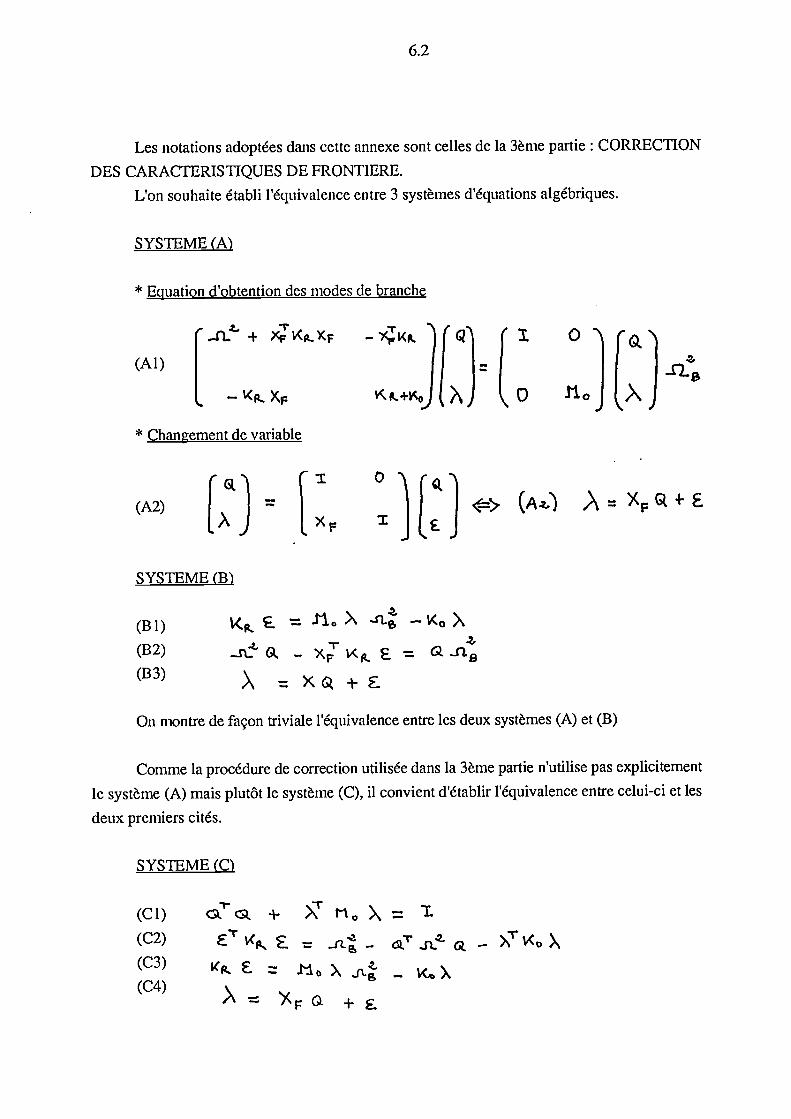
Les notations adoptées dans cette annexe sont celles de la 3ème partie: CORRECTION
DES CARATERISTIQUES DE FRONTIERE.
L'on souhaite établi l'équivalence entre 3 systèmes d'équations algébriques.
SYSTEME (A)
* Equation d'obtention des modes de branche
...n+ )(<p.X (Q_\(Al)
XF* Changement de variable
(A2)
SYSTEME (B)
(Bi) 110X -n i(0X.stO% X<E aa0
X
On montre de façon triviale l'équivalence entre les deux systèmes (A) et (B)
Comme la procédure de correction utilisée dans la 3ème partie n'utilise pas explicitement
le système (A) mais plutôt le système (C), il convient d'établir l'équivalence entre celui-ci et les
deux premiers cités.
SYSTEME (C)
(Cl) Q, Q, + >\ rt0> 1.-r
E - >%'<D X
VpE>.:: )<FQ
IX1
6.2
L
°11 f $>
I J(E.JXFQ+E.

6.3
(Cl) et (C2) sont déduites des relations d'orthogonalité par rapport aux deux matrices de
masse et de rigidité liées à l'équation (Al). On montre donc aisément:
Montrons que
> (c)
> (,c)
Il suffit pour cela de retrouver (B2) à partir de (C).
(Cl) et (C2)
En tenant compte de (C3), il vient:
En utilisant (C4), on obtient -Comme est inversible (résultat établi dans l'ANNEXE 7), ii vient:
c4D'où le résultat:
CONCLUS ION(A > (&)
c)Donc:
.> () Çc)
Les 3 systèmes (A), (B) et (C) sont équivalents.
Gn!4 TL<&E C
i
7.1
ANNEXE 7
INVERSIBILITE DE LA MATRICE Q
MODES DE CORPS RIGIDES CHARGES
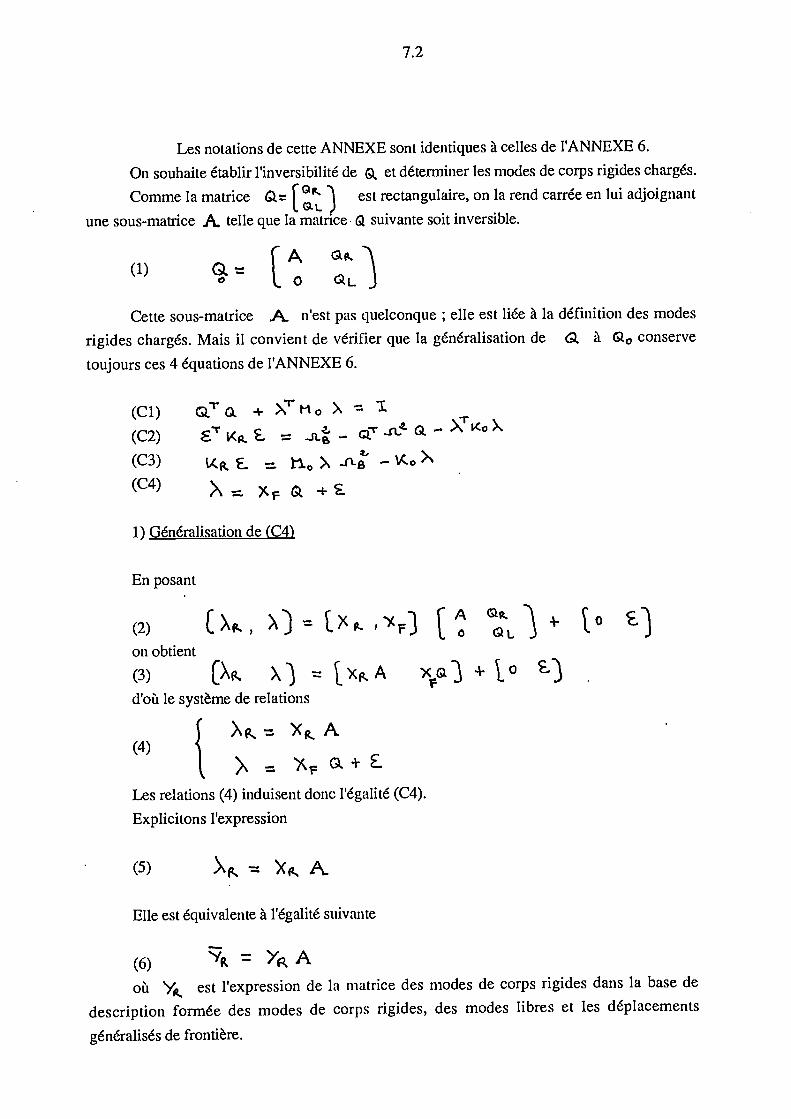
7.2
Les notations de cette ANNEXE sont identiques à celles de l'ANNEXE 6.
On souhaite établir l'inversibilité de et déterminer les modes de corps rigides chargés.
Comme la matrice Q.{ '
est rectangulaire, on la rend carrée en lui adjoignant
une sous-matrice A telle que la matrice - Q suivante soit inversible.
ÇAto QL
Cette sous-matrice A n'est pas quelconque ; elle est liée à la définition des modes
rigides chargés. Mais il convient de vérifier que la généralisation de O. à G conserve
toujours ces 4 équations de l'ANNEXE 6.
(Cl) + >%'t-lQ >% I- >r1<0
E - tiø>. ->
1) Généralisation de (C4
En posant
)J 1P- ') o Qon obtient
[) x) s:XfA XQ3 4.d'où le système de relations
)(A>
Les relations (4) induisent donc l'égalité (C4).
Explicitons l'expression
Elle est équivalente à l'égalité suivante
= >'Aoù Y est l'expression de la matrice des modes de corps rigides dans la base de
description formée des modes de corps rigides, des modes libres et les déplacements
généralisés de frontière.
s:o
(1)o
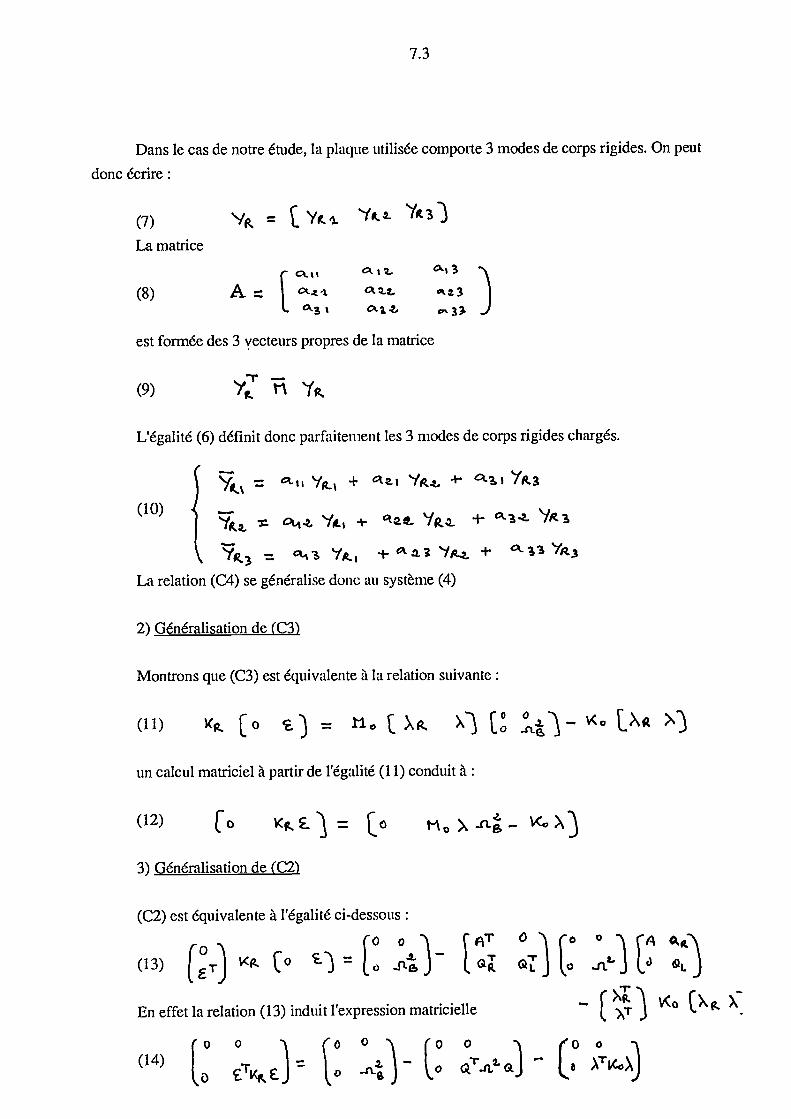
(8)
est formée des 3 vecteurs propres de la matrice
; flip..L'égalité (6) définit donc parfaitement les 3 modes de corps rigides chargés.
Yg- + c l,u. 1- c.%1 YR.3
'/ + 'k.t& 'Ip. 1- O..1.2 '/R.3
Gtj3 'fR, +'/P-2. '7.3
La relation (C4) se généralise donc au système (4)
2) Généralisation de (C3)
Montrons que (C3) est équivalente la relation suivante:
7.3
Dans le cas de notre étude, la plaque utilisée comporte 3 modes de corps rigides. On peut
donc écrire:
(7) = Y&&
La matrice
I_ A3
[o 'a) ri0 >%t.
un calcul matriciel à partir de l'égalité (11) conduit à:
3) Généralisation de (C2
(C2) est équivalente à l'égalité ci-dessous:
(O o \ fAT O \ (o O \ ( \(o 'a j L 4 Qr j o ..rt
.
r 'Thj >%P. (xe.. xEn effet la relation (13) induit l'expression matricielle r j
(o O 00 (00 (00I
o £TK o o - ô o)
1.
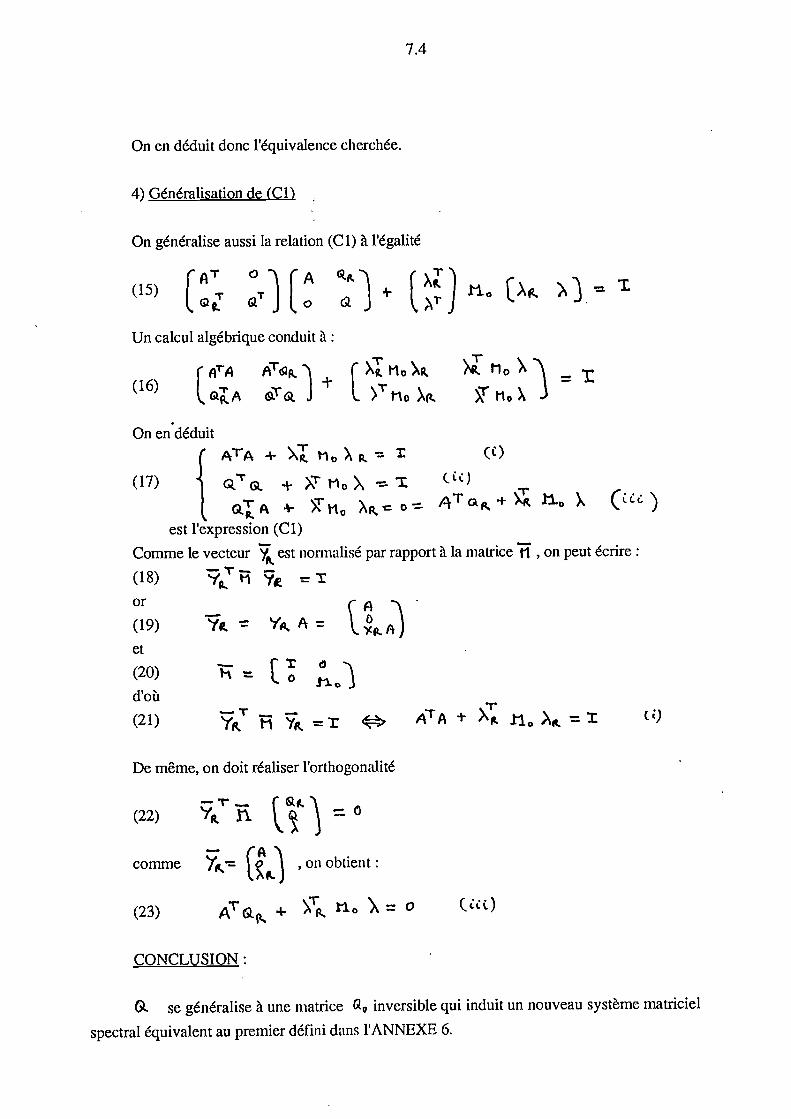
7.4
On en d&Iuit donc l'équivalence cherchée.
4) Généralisation de (Cl)
On généralise aussi la relation (Cl) à l'égalité
(AT(15)
1 T
Un calcul algébrique conduit à:
&#(16) I ,Qp,A
On endéduit
I AA+X)t (C)
j + >fli0X (Ce)
I - D X
est l'expression (Cl)
Comme le vecteur est nonnalisé par rapport à la matrice ì , on peut écrire:
°\IA T
ÇXi-i0).I T'... I t1 )
or ÇA -.''4rn. =
et-_ O -'
= t_o h..0.\d'où T -
'Z'( i ?,. T 4'De même, on doit réaliser l'orthogonalité
comme , on obtient:
ATG + = (ecc)
CONCLUSION:
ATA-r+ > Ìi0)=I
)
C )
G.. se généralise à une matrice & inversible qui induit un nouveau système matriciel
spectral équivalent au premier défini dans l'ANNEXE 6.
8.1
ANNEXE 8
EXTENSION DE LA CONI)ENSATION DYNAMIQUE
I)E GUYAN
On considère le problème dynamique suivant
(1)
(2.a)
5[<) = (,&f M)
= >'F
8.2
2 Q Vo
où est un domaine de . de frontière de raccordeiient r0, (K\ et
respectivement les opérateurs linéaires (le rigidité et de masse , B) l'opérateur linéaire de
frontière et X F le déplacement frontière.
On associe à ce problèm (1) deux problèmes particuliers
ç ,Q-1 1 -ioù '- .) L -J matrice spectrale diagonale du carre de N premieres l)tIlStt1O1s
de N modes considérés et
(2.b) L
cfl(3)
C) Vfl =
Les solutions de (2) sont les modes encastrés et celles de 3), Ç] sont les modes
statiques introduits au chapitre I.
Ve.eb
Le but de la méthode est de résoudre le problème (1) à l'aide de modes encastrés t\ et
des modes statiques [-3.
1) Solution générale
On recherche la solution du plot)lènle (1) comme une combinaison linéaire des modes
encastrés et des modes d'attache [f] , soit
(L CcU °l + £fl )F
M'où est le vecteur dc coordonnées modales déterminer pour (itiC le système
LMi(1) soit verifie.
En introduisant (4) dan (I) et en tenant compie de (2.a) et (3), ii vient
C L a-co) =
En multipliant (5) parT1
après une intégration sur , on obtient
= LA- [GjT)roù
ç(cjt_c.u&J , -
La solution u... du problème (1) s'écrit donc
(8) (c[çGT+II convient de remarquer que si w , le déplacement de frontière >. F doit être
nul pour que - soit une quantité finie.
2) ßfatricc dc rigidité dynaini que en formulation continue
On souhaite établir l'expression (le la matrice dynamique D (.u)] à l'aide du théorème de
réciprocité.Pour une structure vibrant à une pulsation w, Ç D (c.)) est définie par
8.3
(7) [A) =
(9) i: b(w)) 1=
8.4
où c' - h co -- Q. 4i'v' ct, sont respectivement les vecteurs déplacement et
force généralisés.
Pour (Ri = o / (8) devient
(10)[(fl
où F0 est associé au vecteur foice Q appliquée aux DDL de frontière. On considère
les deux états d'équilibre suivants (le la sii ucture
* Un premier état statique avec la Ii ce & et le déplacement réstiltant qui vaut F sur
la frontière F0* Un second état de vibrations harmoniques avec la force F et la réponse U. 4i'i
d'expression )F èt'1e sur la lon1ière r0.
Le travail de la force statique pendant le cIél)lacement harmonique est 4- w tandisque le travail de la force harthonique pendant le déplacement statique s'écrit
(Q.rFu #w Lcar il faut inclure la force d'inertie par unité de volume Ctt aux forces
à l'état de vibrations harmoniques. Le théorème de la réciprocité donne alors
rF 1F\F
En tenant compte (les équations (8), (9) et (10), (11) devient
XF Eb >\F = >-; >Fb
+ f(c t c' CrÛF; Jr
Comme AR et Xr sont qIIelcom(pIes, il vient
(D
3Tj
On dédvit de la définition (7) (Ic i)jCA+ )T(c) CGcLcT)E)-f c1AP GC)' tri.)
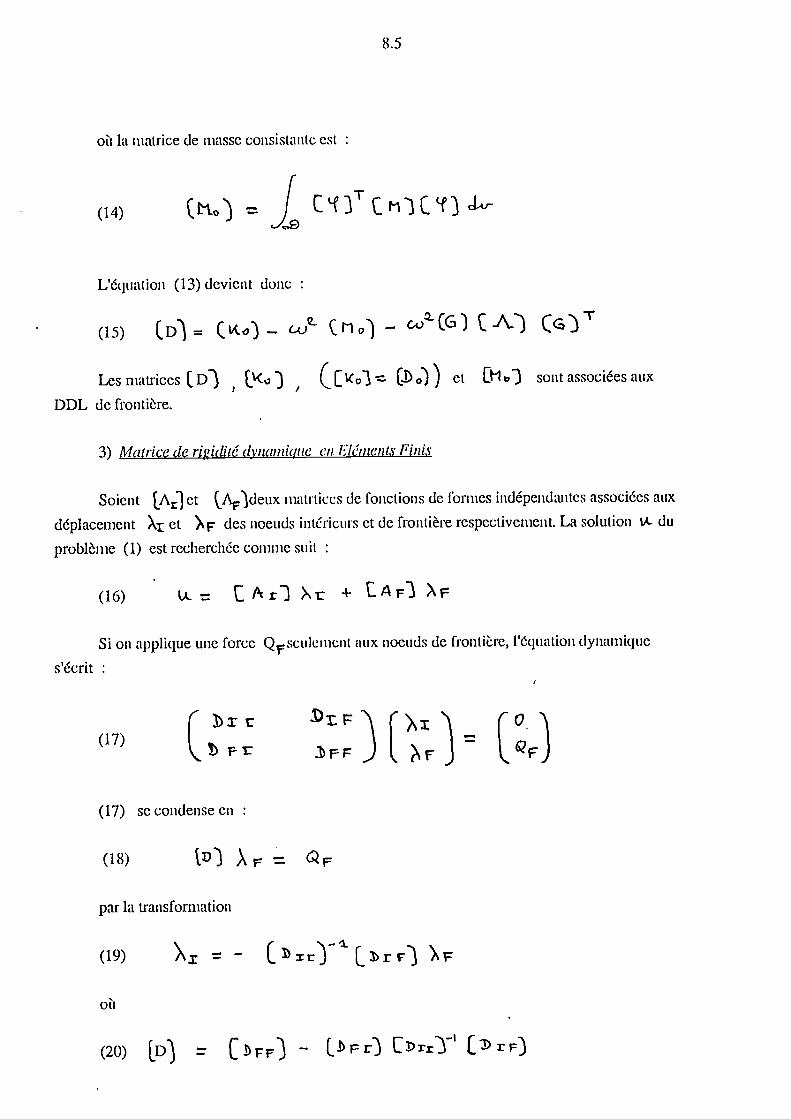
où la matrice de masse consistante est
8.5
(17)1tbr
se condense en
Çv)
par la transformation
- C r'YLrc) )où
[) = C !) FF) - F r) Ci rrY' [D E F)
0tF'\ '\FJ\J
(14) (h.0') = CTcCfl cL'
L'équation (13) devient donc
(D\= (,)_ c»u CMV) - G)Ç.PC) (G
Les nmtrices [D) ft(,) / ..b )) et LH ') sont associées aux
DDL de frontière.
3) Matrice dc rig idit dynanu que en EM,iw,iis Finis
Soient AE1 et ÇA)deux mairtices (le fonctions de formes indépendantes associées aux
déplacement Xr et F des noeuds intérieurs et de frontière respectivement. La solution k. du
problème (1) est recherchée comme suit
tA £Ptr >t 4 t.AFl )F
Si on applique une force Qsculcincnt aUX noeuds de frontière, l'équation dynamique
s'écrit

8.6
Si la matrice (p r) est singulière ì une certaine fréquence W, il convient d'annuler
pour (lue > garde une valeur finie d'après (19).
On obtient donc
lA. = - fr I).tt 1).t F )F
Si W= o , (21) devient
(.t = L A - t <TF >'Fo
Comme , d'après (10)
U C.'fl)'Fb
On déduit
Efl
Soit SI'4' )la matrice modale des mundes encastrés discrets et pour un choix identique des
fonctions de formes, il vient
LArL9')
et
L'<rt\ LM)
où (t<) [ brr CoJ) et CJL) la matrice spectrale diagonale du carré des
pulsations des N modes encastrés.
Les relations d'orthogonalité s'écrivent
Lr1rt LLT
et
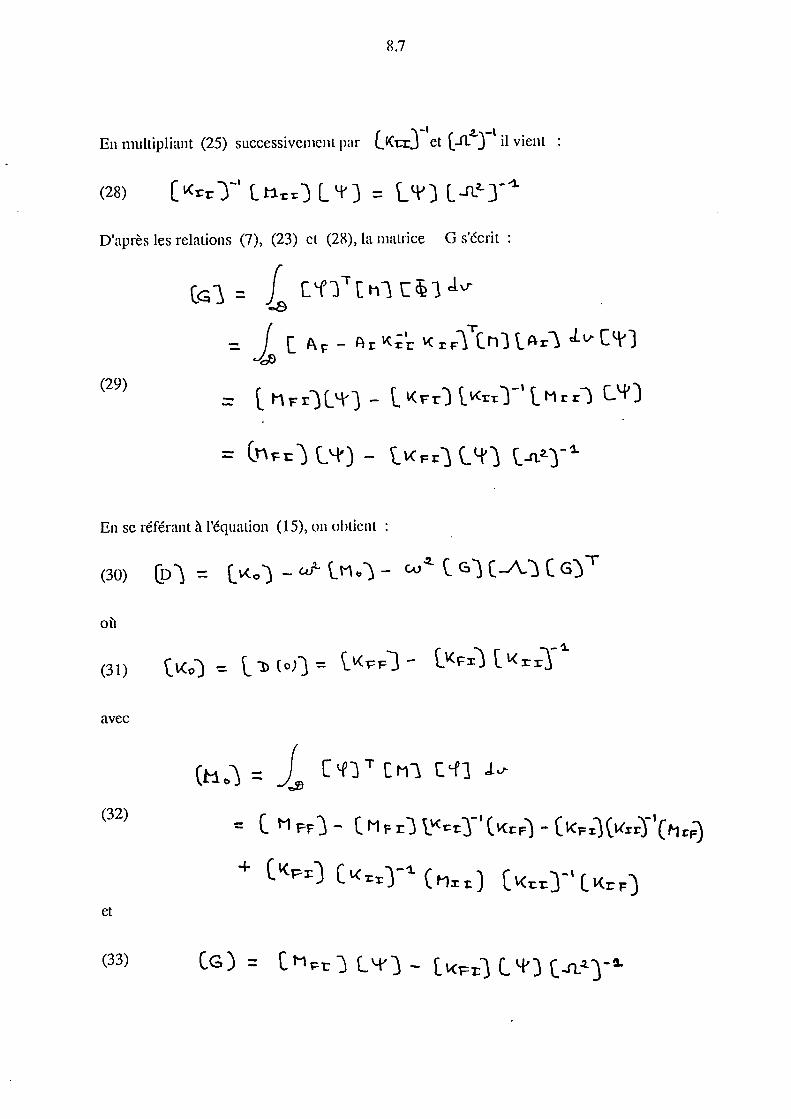
( 2.-I.En multipliant (25) successivement par LKEEJ et 1_fl- ) il vient
[(rr) Lt) LM) LM) LJL3
D'après les relations (7), (23) eL (28), la matrice G s'écrit
LEt rF)r cLiC')
- rtt1t L1')
(flt L) - S(Fr ( Ç-cit
En se référant à l'équation (15), on obtient
LD\ [Q3 - Çji 63 CA CGT
où
(°) F'rravec
-
8.7
= L i - [M ) ¶<tt3' (i4::F) -
+ C-t LEF)et
CG) = CMc L4') -
8.8
Le troisième terme, G) CA.) ÇG)T a été négligé GUYAN et plusieurs auteurs,
dans l'expression (30). C'est le terme cori'cctií apporté par LEUNG pour améliorer la précision
des résuhats.
ç
dernière page de la thèse
AUTORISATION DE SOUTENANCE
I
Vu les dispositions de l'arrêté du 5 juillet 1984,
Vu la demande du Directeur de ThèseM. F. SIDOROFF - Professeur - E.C.L.
et les rapports de R.J. GIBERT - Directeur de Labo. - CEA SACLAYL. JEZEQUEL - Maître de Conférences - E.C.L.
Monsieur TCHERE Séka
est autorisé à soutenir une thèse pour l'obtention du titre de DOCTEURSpécialité MECANIQUE
Fait à Ecully, le 30 mars 1988
L'Administrate 'rovisoire,de
OUX





























