Embed Size (px)
Citation preview

MTNS – 2002 1
Final Program
Fifteenth International Symposium on
Mathematical Theory ofNetworks and Systems
University of Notre Dame,
South Bend, Indiana, USA
August 12-16, 2002.
www.nd.edu/~mtns/
MTNS – 2002 2
Organizing Committee of MTNS 2002
SYMPOSIUM CHAIRJoachim Rosenthal (USA)
PUBLICATION CHAIRDavid S. Gilliam (USA)
PROGRAM COMMITTEEMark Alber (USA)Joe Ball (USA)Vincent Blondel (Belgium)Tyrone Duncan (USA)Avraham Feintuch (Israel)David Forney (USA)Krzysztof Galkowski (Poland)Tryphon Georgiou (USA)Heide Gluesing-Luerssen (Germany)Koichi Hashimoto (Japan)Bernard Hanzon (The Netherlands)Diederich Hinrichsen (Germany)Aleksandar Kavcic (USA)Matthias Kawski (USA)Belinda King (USA)Wolfgang Kliemann (USA)Margreet Kuijper (Australia)Naomi Leonard (USA)Daniel Liberzon (USA)Wei Lin (USA)Brian Marcus (USA)Volker Mehrmann (Germany)Raimund Ober (USA)Dieter Praetzel-Wolters (Germany)Eric Rogers (United Kingdom)Pierre Rouchon (France)Hans Schumacher (The Netherlands)Mark Shayman (USA)Rodolphe Sepulchre (Belgium)Anton Stoorvogel (The Netherlands)Maria Elena Valcher (Italy)
Victor Vinnikov (Israel)Xiaochang Wang (USA)Shigeru Yamamoto (Japan)Sandro Zampieri (Italy)
STEERING COMMITTEEV. Blondel (Belgium)C.I. Byrnes (USA)R. Curtain (The Netherlands)B.N. Datta (USA)P. Dewilde (The Netherlands)P. Van Dooren (Belgium)H. Dym (Israel)A. El Jay (France)M. Fliess (France)P. Fuhrmann (Israel)I. Gohberg (Israel)U. Helmke (Germany)J.W. Helton (USA)A. Isidori (Italy)M.A. Kaashoek (The Netherlands)H. Kimura (Japan)A.J. Krener (USA)A.B. Kurzhansky (Russia)A. Lindquist (Sweden)C.F. Martin (USA)G. Picci (Italy)A.C.M. Ran (The Netherlands)A. Rantzer (Sweden)J. Rosenthal (USA)J.H. van Schuppen (The Netherlands)Y. Yamamoto (Japan)
HONORARY MEMBERS
C.A. Desoer (USA)R.W. Newcomb (USA)A.H. Zemanian (USA).

MTNS – 2002 3
WELCOME TO MTNS 2002
On behalf of the Organizing Committee of MTNS 2002 I welcome you to the 15thedition of MTNS, the International Symposium on the Mathematical Theory ofNetworks and Systems.
The symposium is organized every two years and traditionally covers areas involv-ing a wide range of research directions in mathematical systems, networks andcontrol theory. Mathematical methods which play a role in the areas mentionedabove stem from a broad range of fields of pure and applied mathematics, includingordinary and partial differential equations, real and complex analysis, numericalanalysis, probability theory and stochastic analysis, operator theory, linear andcommutative algebra as well as algebraic and differential geometry. There are awide range of applications ranging from problems in biology, communications andmathematical finance to problems in chemical engineering, aerospace engineeringand robotics. One of the special features of MTNS 2002 will be 5 Mini-symposia,each consisting of a whole series of sessions. The Mini-sypomposia reflect areaswhere systems and control theory play a significant role.
MTNS 2002 features a total of 20 plenary and semi-plenary talks by some of theleading researchers in the area of systems and control theory. There will also be 90sessions lasting 2 hours each. Members of the International Program Committeeand Members from the Steering Committee were actively involved in the reviewingprocess and in the organization of sessions. I would like to express my sincerethank to all the members of these committees. I would also like to thank theStaff of the Department of Mathematics and the Center for Continuing Educationat Notre Dame for their great help in the organization. A special thanks goes toDavid Gilliam, who worked countless hours, day and night, to make the submissionof abstracts and papers and the completion of the conference proceedings a reality.
MTNS 2002 received generous support from the National Science Foundation,The Institute for Mathematics and its Applications (IMA) in Minnesota and fromvarious departments and colleges at the University of Notre Dame. This supportmade it possible that many young researchers received travel support to attendMTNS 2002.
We hope you will find the 15th edition of MTNS interesting and rewarding.
Joachim RosenthalMTNS 2002 Symposium Chair
MTNS – 2002 4
MTNS HISTORY
The fourteen previous MTNS meetings were held in:
1973 : College Park, Maryland, USA,
1975 : Montreal,Canada,
1977 : Lubbock, Texas, USA,
1979 : Delft, Netherlands,
1981 : Santa Monica, California, USA,
1983 : Beer Sheva, Israel,
1985 : Stockholm, Sweden,
1987 : Phoenix, Arizona, USA,
1989 : Amsterdam, Netherlands,
1991 : Kobe, Japan,
1993 : Regensburg, Germany,
1996 : St. Louis, Missouri, USA,
1998 : Padova, Italy,
2000 : Perpignan, France.
Financial Support was received for MTNS 2002 from:
National Science Foundation (NSF)Institute for Mathematics and its Applications (IMA)Center for Applied Mathematics, Notre DameProvost Office of University of Notre DameCollege of Science, University of Notre DameGraduate School at University of Notre Dame

MTNS – 2002 5
Special Events at MTNS 2002
• Minisymposium on Biological Systems:Organizers: Mark Alber and Raimund Ober.Sessions: TUA2: Patterns in Biology
TUM2: Immunology 1: Introduction and MicroscopyTUP2: Immunology 2: Microscopy and BiophysicsWA1: Immunology 3: Structure and KineticsWM1: Immunology 4: Diffusion and ModellingWP1: Immunology 5: Cellular AspectsTHA1: Complex Networks and Biological Applications 1THM1: Complex Networks and Biological Applications 2THP1: Complex Networks and Biological Applications 3FA1: Genetic Networks
• Minisymposium on Communication Systems:Organizers: David Forney and Brian Marcus.Sessions: MA1: Minicourse on “Capacity of Multidimensional Codes”
MM1: Capacity of Multi-Dimensional Codes Part IIMP1: The Interaction of Control, Information and CommunicationTUA1: Design and Analysis of Block Codes, Part ITUM1: Design and Analysis of Block Codes, Part IITUP1: Convolutional CodesWA2: Computer NetworksWM2: Control and CommunicationsWP2: Cryptography
• Minisymposium on Control and Computation:Organizers: Paul van Dooren, Uwe Helmke and Volker MehrmannSessions: WA4: Model Reduction
WM4: Control and ComputationWP4: Large-Scale Computations in ControlTHA4: Fully Nonlinear, Three-Dimensional, Surface Water Waves in Arbitrary DepthTHM4: Robust Control and Linear Matrix InequalitiesTHP4: Computational Methods for Structured Matrices and ApplicationsFA4: Stability and NumericsFM4: Nonlinear Surface Water Waves: Theory, Computation and Experiment
MTNS – 2002 6
• Minisymposium on Financial Systems:Organizers: Hans Schumacher and Michael Taksar.Sessions: THA3: Systems and Control Theory in Finance and Insurance 1
THM3: Systems and Control Theory in Finance and Insurance 2
• Minisymposium on Multidimensional Systems:Organizers: Krzysztof Galkowski, Eric Rogers and Victor Vinnikov.Sessions: TUA3: Minicourse A: Multidimensional Systems
TUM3: Multidimensional Systems 1TUP3: Multidimensional Systems 2WA3: Minicourse B: Multidimensional SystemsWM3: Multidimensional Systems 3WP3: Multidimensional Systems 4THA5: Multidimensional Systems 5
• Workshop on Open Problems in Systems Theory:Organizer: Vincent BlondelTime: Monday and Tuesday, August 12, 13 from 20:00–22:00 in Room 102 De Bartolo Hall.
• Panel Discussion on “Future Directions of Research and Teaching on Mathe-matical Control and Systems Theory”:Organizer: Biswa DattaTime: Wednesday Evening August 14, from 20:00–22:00 in Room 102 De Bartolo Hall.
MTNS – 2002 7
Plenary Speakers:
Anthony Bloch (University of Michigan),
William Helton (University of California),
Bruce Hajek (University of Illinois),
Gilbert Strang (MIT),
Eduardo Sontag (Rutgers University).
Special Topic Invited Speaker:
Albert-Laszlo Barabasi (University of Notre Dame),
Roger Brockett (Harvard University),
Raffaello D’Andrea (Cornell University),
Matthias Heinkenschloss (Rice University),
Knut Hueper (University of Wuerzburg),
Karl Kunisch (Graz University),
Hans-Andrea Loeliger (ETH),
Robert J. McEliece (Cal Tech),
Wolfgang Runggaldier, (University of Padova),
Arjan van der Schaft (University of Twente),
Olof Staffans (Abo Akademi University),
Allen Tannenbaum (Georgia Tech),
Sjoerd Verduyn Lunel (University of Leiden),
Jan Willems (University of Groningen),
Jeffrey Wood (University of Southampton).

MTNS – 2002 8
General Information
Registration Desk: The Registration desk islocated in McKenna Hall, also called Center forContinuing Education (CCE). It will be openSunday afternoon August 11, and staff will beavailable throughout the conference week duringbusiness hours.
Shuttle Bus: There will be continuous loopsfrom the two conference hotels (Comfort Suitesand Inn at Saint Mary’s) to the conference center(CCE) housed in McKenna Hall during the times:Sunday, August 11 noon - 9:30 pmMonday, August 12 7 am - 10:30 pmTuesday, August 13 7 am - 10:30 pmWednesday, August 14 7 am - 10:30 pmThursday, August 15 7 am - 10:30 pmFriday, August 16 7 am - 9 pm
Computer Access: Every participant receiveshis own login name and his own password. It willallow her/him to access the Notre Dame com-puter system from a machine in De Bartolo Hall.
Recreational Activities: The registrationpackage will include information on possibilitiesto use the recreational facilities at Notre Damelike e.g. the swimming pools and the golf course.
Social Events:
• Sunday 18:00-21:00: There is a WelcomingParty in the Center for Continuing Educa-tion.
• Thursday 19:00-22:00: Banquet Dinner
• Friday 18:00-20:00: Farewell Party.
Notre Dame Tourism: The University offersa regular schedule of campus tours. Call the EckVisitors’ Center at (574) 631-5726 for more infor-mation.Next to De Bartolo Hall is the Snite Museum ofArt with a good collection of Fine Art. Admis-sion is free.
MTNS – 2002 9
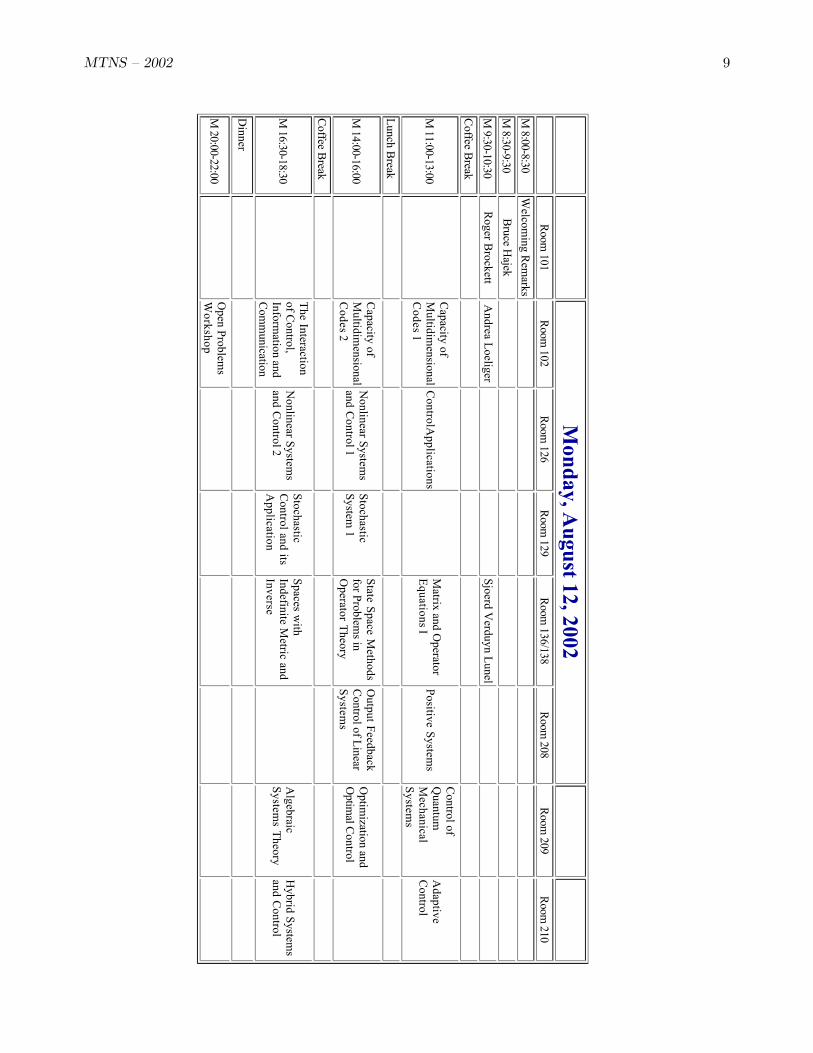
Monday, A
ugust12, 2002
Room
101R
oom 102
Room
126R
oom 129
Room
136/138R
oom 208
Room
209R
oom 210
M 8:00-8:30
Welcom
ing Rem
arks
M 8:30-9:30
Bruce H
ajek
M 9:30-10:30
Roger B
rockettA
ndrea Loeliger
Sjoerd Verduyn L
unel
Coffee B
reak
M 11:00-13:00
C
apacity of M
ultidimensional
Codes
1C
ontrolApplications
M
atrix and Operator
Equations
IP
ositive System
s
Control of
Quantum
M
echanicalS
ystems
Adaptive
Control
Lunch B
reak
M 14:00-16:00
C
apacity of M
ultidimensional
Codes
2
Nonlinear System
s and C
ontrol1S
tochastic System
1
State Space Methods
for Problems in
Operator T
heory
Output Feedback
Control of L
inearS
ystems
Optim
ization and O
ptimalC
ontrol
Coffee B
reak
M 16:30-18:30
The Interaction
of Control,
Information
and C
omm
unication
Nonlinear System
s and C
ontrol2
Stochastic
Control and its
Application
Spaces with
Indefinite Metric and
Inverse
Algebraic
System
s Theory
Hybrid System
s and C
ontrol
Dinner
M 20:00-22:00
O
pen Problems
Workshop
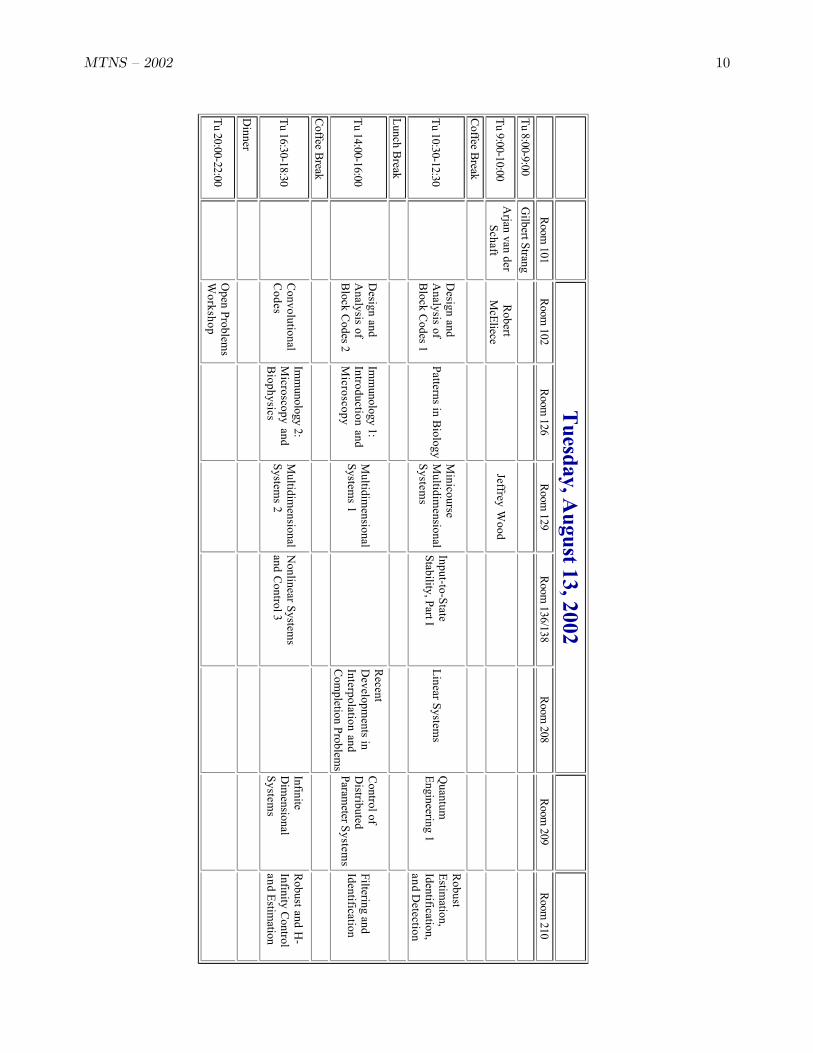
MTNS – 2002 10
Tuesday, A
ugust13, 2002
Room
101R
oom 102
Room
126R
oom 129
Room
136/138R
oom 208
Room
209R
oom 210
Tu 8:00-9:00
Gilbert Strang
Tu 9:00-10:00
Arjan van der
Schaft
Robert
McE
liece
Jeffrey Wood
Coffee B
reak
Tu 10:30-12:30
D
esign and A
nalysis of B
lock Codes
1Patterns in B
iologyM
inicourse M
ultidimensional
System
s
Input-to-State
Stability, PartIL
inear Systems
Quantum
E
ngineering 1
Robust
Estim
ation, Identification, and
Detection
Lunch B
reak
Tu 14:00-16:00
D
esign and A
nalysis of B
lock Codes
2
Imm
unology 1: Introduction andM
icroscopy
Multidim
ensional System
s 1
Recent
Developm
ents in Interpolation andC
ompletion Problem
s
Control of
Distributed
ParameterS
ystems
Filtering and Identification
Coffee B
reak
Tu 16:30-18:30
C
onvolutional C
odes
Imm
unology 2: M
icroscopy andB
iophysics
Multidim
ensional System
s 2N
onlinear Systems
and Control3
Infinite D
imensional
System
s
Robust and H
-Infinity C
ontrol and
Estim
ation
Dinner
Tu 20:00-22:00
O
pen Problems
Workshop
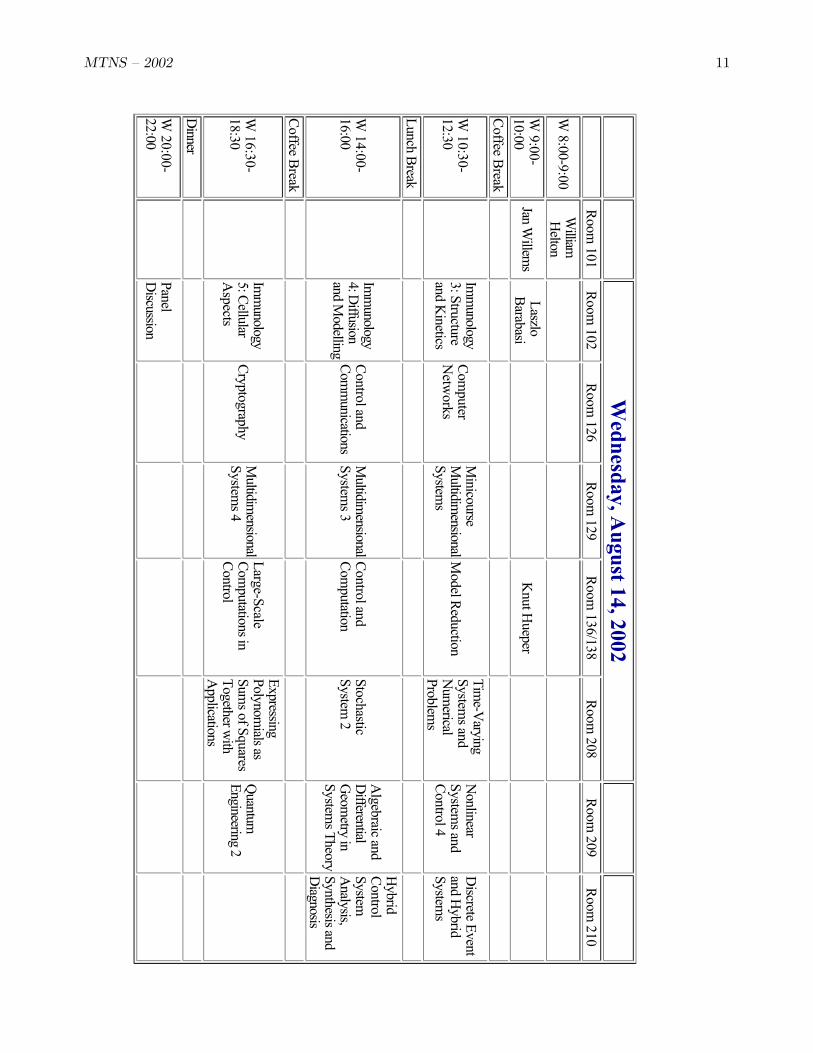
MTNS – 2002 11
Wednesday, A
ugust14, 2002
Room
101R
oom 102
Room
126R
oom 129
Room
136/138R
oom 208
Room
209R
oom 210
W 8:00-9:00
William
H
elton
W 9:00-
10:00Jan W
illems
Laszlo
Barabasi
Knut H
ueper
Coffee B
reak
W 10:30-
12:30
Imm
unology 3: Structure and K
inetics
Com
puter N
etworks
Minicourse
Multidim
ensional System
sM
odel Reduction
Tim
e-Varying
Systems and
Num
erical Problem
s
Nonlinear
Systems and
Control 4
Discrete E
vent and H
ybrid System
s
Lunch B
reak
W 14:00-
16:00
Imm
unology 4: D
iffusion and M
odelling
Control and
Com
munications
Multidim
ensional System
s 3C
ontrol and C
omputation
Stochastic System
2
Algebraic and
Differential
Geom
etry in System
s Theory
Hybrid
Control
System
Analysis,
Synthesis andD
iagnosis
Coffee B
reak
W 16:30-
18:30
Imm
unology 5: C
ellular A
spectsC
ryptographyM
ultidimensional
Systems 4
Large-Scale
Com
putations in C
ontrol
Expressing
Polynomials as
Sums of Squares
Together w
ithA
pplications
Quantum
Engineering 2
Dinner
W 20:00-
22:00
Panel D
iscussion

MTNS – 2002 12
Thursday, A
ugust15, 2002
Room
101R
oom 102
Room
126R
oom 129
Room
136/138R
oom 208
Room
209R
oom 210
Th 8:00-9:00
Eduardo S
ontag
Th 9:00-10:00
Olof Staffans
Wolfgang
Runggaldier
Matthias
Heinkenschloss
Coffee B
reak
Th 10:30-12:30
B
iological N
etworks 1
Distributed
Parameter
Systems: T
heoryPart I
Systems and
Control T
heory in Finance andInsurance, Part 1
Fully Nonlinear, T
hree-D
imensional,Surface
Water W
aves in A
rbitrary Depth
Multidim
ensional Systems
5
Globally Stable
Robust V
isualS
ervoing
Matrix and
Operator
Equations
2
Lunch B
reak
Th 14:00-16:00
B
iological N
etworks 2
Distributed
Parameter
Systems: T
heoryPart II
Systems and
Control T
heory in Finance andInsurance, Part 2
Robust C
ontrol and L
inear Matrix
InequalitiesT
he Behavioral A
pproach to D
ynamic
System
s
Control and
Dynam
ics of M
echanicalSystem
s 1
Control and
Algebra
Coffee B
reak
Th 16:30-18:30
B
iological N
etworks 3
Distributed
Parameter
System
s:Stabilization and C
ontrol, Part I
Stochastic
Theory and its
Applications
Com
putational Methods
for StructuredM
atrices and A
pplications
Control and
Dynam
ics of M
echanicalSystem
s 2
New
A
pproaches to A
daptiveC
ontrol
Banquet
Dinner

MTNS – 2002 13
Friday, A
ugust16, 2002
Room
101R
oom 102
Room
126R
oom 129
Room
136/138R
oom 208
Room
209R
oom 210
F 8:00-9:00A
nthony B
loch
F 9:00-10:00R
affaello D
'Andrea
Allen T
annenbaumK
arl Kunisch
Coffee B
reak
F 10:30-12:30
Genetic N
etworks
Distributed
Parameter
System
s:Stabilization and C
ontrol, Part II
Stochastic
Control and
Estim
ation
Stability and N
umerics
A B
ehavioral A
pproach to System
s, Control
and Coding
Theory
Coordinated C
ontrol of V
ehicleN
etworks
Nonlinear
Control and
Applications
Lunch B
reak
F 14:00-16:00
Mathem
atical T
heory of N
etworks and
Circuits
Distributed
Parameter
System
s:A
pplications and C
omputation, Part
I
Operator
Theoretic
Methods
Nonlinear Surface
Water W
aves: T
heory,Com
putation and E
xperiment
Input-to-State
Stability, PartII
Coffee B
reak
F 16:30-18:30
Distributed
Parameter
System
s:A
pplications and C
omputation, Part
II
Farewell Party

MTNS – 2002 14
Schedule of Events
Sunday August 11, 2002
18:00—21:00 Welcoming Reception
Center for Continuing Education
Monday August 12, 2002
8:00-8:30 Room : 101
Welcoming Remarks
Panos J Antsaklis,Director, Center for Applied MathematicsSteven Buechler,Chair, Department of MathematicsJeffrey C Kantor,Vice President
8:30-9:30 Room : 101 Plenary Talk
Bruce Hajek,A Basket of System Theoretic Problemsin Communications
9:30-10:30 Room : 101 Invited Talk
Roger Brockett,Optimal System Identification for NMRApplications
9:30-10:30 Room : 102 Invited Talk
Hans-Andrea Loeliger,Factor Graphs, Least Squares andKalman Filtering
9:30-10:30 Room : 136 Invited Talk
Sjoerd Verduyn Lunel,Control and Stabilization of Systemswith Time Delays
Morning:
Room: 102, Session: MA1
Chair: Shmuel Friedland, Brian MarcusTitle: Capacity of Multi-DimensionalCodes Part I11:00-13:00 Minicourse on “Capacity of
Multidimensional Codes”,Shmuel Friedland
Room: 126, Session: MA2
Chair: Michael D. LemmonTitle: Control Applications
11:00-11:20 Cancer Treatment Using Mul-tiple Chemotherapeutic Agents Subjectto Drug Resistance, John Westman, BruceFabijonas, Daniel Kern, Floyd Hanson
11:25-11:45 Selection of Decentralized Con-trol Configurations Based on Distur-bance Rejection for Plants with Real In-tegrators, Henning Schmidt
11:50-12:10 Synergetic Control of the Un-stable Two-Mass System, AlexanderKolesnikov
12:15-12:35 Synergetic Control for Elec-tromechanical Systems, Andrey Popov,Anatoly Kolesnikov, Gennady Veselov, Alexan-der Kolesnikov, Roger Dougal
12:40-13:00 Modeling of Out-of-Plane Hy-groinstability of Multi-Ply Paperboard,Gianantonio Bortolin, Per-Olof Gutman
Room: 136, Session: MA4
Chair: Bill Helton, Andre Ran, Leiba RodmanTitle: Matrix and Operator Equations I
11:00-11:30 Noncanonical Almost PeriodicFactorization and Toeplitz Operatorswith Almost Periodic Symbols, Leiba Rod-man, I. M. Spitkovsky, H. J. Woerdeman
MTNS – 2002 15
11:30-12:00 Symmetric Nonsquare Factoriza-tion of Selfadjoint Rational Matrix Func-tions and Algebraic Riccati Inequalities,A. C. M. Ran, Mark A. Petersen
12:00-12:30 Extremal Problems of Interpola-tion Theory, L. A. Sakhnovich
12:30-13:00 Convex Invertible Cones,Nevalinna-Pick Interpolation and the Setof Lyapunov Solutions, Izchak Lewkowicz,Nir Cohen
Room: 208, Session: MA5
Chair: Lorenzo Farina, Maria Elena ValcherTitle: Positive Systems
11:00-11:30 Positive Systems in the StateSpace Approach: Main Issues and Re-cent Results, Lorenzo Farina
11:30-12:00 Positive Systems in the Behav-ioral Approach: Main Issues and RecentResults, Maria Elena Valcher
12:00-12:30 Feedback Stabilisation with Posi-tive Control of Dissipative Compartmen-tal Systems, Georges Bastin, A. Provost
12:30-13:00 Feedback Control for a Chemo-stat with two Organisms, Patrick De Leen-heer, Hal Smith
Room: 209, Session: MA6
Chair: Augusto Ferrante, Michele PavonTitle: Control of Quantum MechanicalSystems
11:00-11:30 Sufficient Conditions for Control-lability of Finite Level Quantum Systemsvia Structure Theory of Semisimple LieAlgebras, Claudio Altafini
11:30-12:00 Geometric Control of QuantumMechanical Systems in a Noisy Environ-ment, Domenico D’Alessandro
12:00-12:30 Control of Quantum SystemsUsing Model-based Feedback Strategies,Augusto Ferrante, Michele Pavon, GiorgioRaccanelli
12:30-13:00 Quantum Control of DissipativeSystems, Sonia G. Schirmer, A. I. Solomon
Room: 210, Session: MA7
Chair: Peter BauerTitle: Adaptive Control
11:00-11:20 Gap Metric Robustness of Adap-tive Controllers, Mark French
11:20-11:40 Adaptive Predictive Controlwith Controllers of Restricted Structure,Michael Grimble, Peter Martin
11:40-12:00 Output Adaptive Model Refer-ence Control of Linear Continuous State-Delay Plant, Boris Mirkin, Per-Olof Gutman
12:00-12:20 A Comparison Between Ro-bust Adaptive Controllers w.r.t a Non–singular Transient Cost, Ahmad Sanei,Mark French
12:20-12:40 A Manifold Structure on the setof Functional Observers, Jochen Trumpf,Uwe Helmke
14:00-15:00 On the Capacity of 2-D Con-strained Codes and Consequences forFull-Surface Data Channels, WilliamWeeks
Middle:
Room: 102, Session: MM1
Chair: Shmuel Friedland, Brian MarcusTitle: Capacity of Multi-DimensionalCodes Part II
14:00-15:00 On the Capacity of 2-D Con-strained Codes and Consequences forFull-Surface Data Channels, WilliamWeeks
15:00-16:00 Counting Independent Sets inThe Grid, And Similar Questions, NeilCalkin
Room: 126, Session: MM2
Chair: Wei LinTitle: Nonlinear Systems and Control 1
14:00-14:20 Estimating Generalized Gradi-ents of Value Function in Optimal Con-trol Problems for Differential-DifferenceInclusions, Leonid Minchenko, Aleksey Volo-sevich
MTNS – 2002 16
14:20-14:40 Interconnected Systems of FliessOperators, W. Steven Gray, Yaqin Li
14:40-15:00 Controllability Analysis of ATwo Degree of Freedom Nonlinear At-titude Control System, Jinglai Shen, AmitK. Sanyal, N. Harris McClamroch
15:00-15:20 Sliding Mode Idle Speed IgnitionControl Strategies for Automotive En-gines, Manjit Singh Srai, H. Sindano, N. E.Gough, A. C. Cole
15:20-15:40 Truncation and ApproximationErrors in the Max-Plus Algorithm for H-infinity Control, William McEneaney
15:40-16:00 Solution of Second Order Lin-earization, Rajagopalan Devanathan
Room: 129, Session: MM3
Chair: Giorgio Picci, Augusto FerranteTitle: Stochastic Systems 1
14:00-14:30 Canonical Correlations BetweenInput and Output Processes of LinearStochastic Models, Katrien De Cock, BartDe Moor
14:30-15:00 A Regularized Cepstrum andCovariance Matching Method forARMA(n,m) Design, Per Enquist
15:00-15:30 On Some Interpolation Prob-lems, Gyorgy Michaletzky, A. Gombani
15:30-16:00 Non-regular Processes and Sin-gular Kalman Filtering, Augusto Ferrante,Stefano Pinzoni, Giorgio Picci
Room: 136, Session: MM4
Chair: I. Gohberg, M.A. KaashoekTitle: State Space Methods for Problemsin Operator Theory
14:00-14:30 State Space Methods, Repro-ducing Kernel Spaces and Applications,Harry Dym
14:30-15:00 A Beurling–Lax Type Theoremin the Unit Ball, Daniel Alpay, Aad Dijksma,Jim Rovnyak
15:00-15:30 A Naimark Dilation Perspectiveon Positive Real Interpolation, A. Frazho
15:30-16:00 State Space Method, Explicit So-lutions of Scattering Problems, and Non-linear Integrable Equations, Alexander L.Sakhnovich
Room: 208, Session: MM5
Chair: Xiaochang WangTitle: Output Feedback Control of LinearSystems
14:00-14:30 Counterexamples to Pole Place-ment by Real Static Output Feedback,Alex Eremenko, A. Gabrielov
14:30-15:00 Numerical Homotopy Algo-rithms for Satellite Trajectory Controlby Pole Placement, Jan Verschelde, YusongWang
15:00-15:30 Numerical Schubert Calculus bythe Pieri Homotopy Algorithm, Tien-YienLi, Xiaoshen Wang, Mengnien Wu
15:30-16:00 On Minimal Order DecentralizedOutput Feedback Pole Assignment Prob-lems, Xiaochang Wang
Room: 209, Session: MM6
Chair: Yutaka YamamotoTitle: Optimization and Optimal Control
14:00-14:20 A Jacobi-like Method for theIndefinite Generalized Hermitian Eigen-value Problem, Christian Mehl
14:20-14:40 Disturbed Discrete Time Linear-Quadratic Open-Loop Nash games, Ger-hard Jank, Dirk Kremer
14:40-15:00 Linear Matrix Inequalities forGlobal Optimiztion of Rational Func-tions and H2 Optimal Model Reduction,Dorina Jibetean, Bernard Hanzon
15:00-15:20 Newton’s Method for Optimiza-tion in Jordan Algebras, Sandra Ricardo,Uwe Helmke, Shintaro Yoshizawa
15:20-15:40 Non-symmetric Riccati Theoryand Linear Quadratic Nash Games., DirkKremer, Radu Stefan
15:40-16:00 Some New Results on LinearQuadratic Regulator Design for LosslessSystems, Maria Gabriella Xibilia, Luigi For-tuna, Giovanni Muscato
MTNS – 2002 17
Afternoon:
Room: 102, Session: MP1
Chair: Sandro ZampieriTitle: The Interaction of Control, Infor-mation and Communication
16:30-16:50 Minimum Data Rates for Stabil-ising Linear Systems with Unknown Pa-rameters, Girish Nair, Robin J. Evans, BjornWittenmark
16:50-17:10 A Graphical Model Approach toDistributed Control, Sekhar Tatikonda
17:10-17:30 Quantized Stabilization of Single-input Nonlinear Affine Systems, JialingLiu, Nicola Elia
17:30-17:50 Distributed Robust Controllerfor Complex Networks, Wing Shing Wong
17:50-18:10 Stabilizing Quantized Feedbackwith Minimal Information Flow: theScalar Case, Fabio Fagnani, Sandro Zampieri
18:10-18:30 Systems of Dynamics and theirCohomological Invariants, Reuben Rabi,Sanjoy Mitter
Room: 126, Session: MP2
Chair: Matthias KawskiTitle: Nonlinear Systems and Control 2
16:30-16:50 Skorokhod-Neumann BoundaryConditions in Robust Queueing ServiceModels, Martin Day
16:50-17:10 Optimization Methods for Tar-get Problems of Control, Alexander B.Kurzhanski, Pravin Varaiya
17:10-17:30 On Optimal Quadratic Lya-punov Functions for Polynomial Sys-tems, Graziano Chesi, Alberto Tesi, AntonioVicino
17:30-17:50 The Maximum Principle for anOptimal Solution to a Differential In-clusion with State Constraints, AurelianCernea
17:50-18:10 Synergetic Synthesis of Nonlin-ear Interconnected Control for Turbo-generators, Anatoly Kolesnikov, Andrew Kuz-menko
18:10-18:30 Stabilities and Controllabilitiesof Switched Systems (with Applicationsto the Quantum Systems), Leonid Gurvits
Room: 129, Session: MP3
Chair: Amarjit BudhirajaTitle: Stochastic Control and its Applica-tions
16:30-17:00 Nonlinear Filtering in CorrelatedNoise: a Wiener Chaos Approach, SergeyLototsky
17:00-17:30 Stationary Solutions and For-ward Equations for Controlled and Sin-gular Martingale Problems, Richard H.Stockbridge
17:30-18:00 An Investment Model with Liq-uidity Risk, Hui Wang
18:00-18:30 Mean-Variance Portfolio Selec-tion under Markov Regime: Discrete-time Models and Continuos-time Limits,George Yin, X. Y. Zhou
Room: 136, Session: MP4
Chair: Harry Dym, Heinz LangerTitle: Spaces with Indefinite Metrics andInverse
16 :30-17:00 Regular and Singular Point-likePerturbations of some Differential Oper-ators in Pontryagin Spaces, Aad Dijksma,Yuri Shondin
17:00-17:30 Applications of Spaces with In-definite Metrics, Babak Hassibi
17:30-18:00 Sturm-Liouville Inverse SpectralProblems with Boundary Conditions De-pending on the Spectral Parameter, Cor-nelis van der Mee, Vjacheslav Pivovarchik
18:00-18:30 Variational Principles for BlockOperator Matrices, Christiane Tretter,Heinz Langer, Matthias Langer
Room: 209, Session: MP5
Chair: Paul FuhrmannTitle: Algebraic Systems Theory
16:30-16:50 Further Results on Intercon-nection and Elimination for Delay-Differential Systems, Heide Gluesing-Luerssen
16:50-17:10 Reduction of Affine Systemson Polytopes, Jan H. van Schuppen, LucC.G.J.M. Habets
MTNS – 2002 18
17:10-17:30 State Feedback Stabilizationwith Guaranteed Transient Bounds,Fabian Wirth, Diederich Hinrichsen, ElmarPlischke
17:30-17:50 Reduction of the Number of Pa-rameters for all Stabilizing Controllers,Kazuyoshi Mori
17:50-18:10 Structural Properties of LTI Sin-gular Systems by Output Feedback, RunyiYu, Dianhui Wang
18:10-18:30 On Fliess Models over a Commu-tative Ring, Vakhtang Lomadze
Room: 210, Session: MP6
Chair: Daniel LiberzonTitle: Hybrid Systems and Control
16:30-17:00 Nonlinear and Hybrid Controlvia RRTs, Michael Branicky, Michael M.Curtiss
17:00-17:30 Reachability Analysis of HybridSystems with Linear Dynamics, MireilleBroucke
17:30-18:00 Towards the Control of LinearSystems with Minimum Bit-Rate, JoaoHespanha, Antonio Ortega, Lavanya Vasude-van
18:00-18:30 Control of Hybrid Systems alongLimit Cycles, Milos Zefran, Guobiao Song,Francesco Bullo
20:00–22:00 Room : 102
Workshop on Open Problems in Sys-tems Theory
Chairs: Vincent Blondel, Roger Brockett
Tuesday August 13, 2002
8:00-9:00 Room : 101 Plenary Talk
Gilbert Strang,Filtering and Signal Processing
9:00-10:00 Room : 101 Invited Talk
Arjan van der Schaft,Mathematical Theory of Network Mod-els of Physical Systems
9:00-10:00 Room : 102 Invited Talk
Robert J. McEliece,Belief Propagation on Partially OrderedSets
9:00-10:00 Room : 129 Invited Talk
Jeff Wood,Modules and Behaviors: Re-examiningOberst’s Duality
Morning:
Room: 102, Session: TUA1
Chair: Heide Gluesing-LuerssenTitle: Design and Analysis of BlockCodes, Part I
10:30-11:30 Iterative Decoding and Design ofCodes on Graphs, Pascal O. Vontobel
11:30-12:00 Codes for Networks, Ralf Koetter12:00-12:30 Unitary Constellation Design
with Application to Space-time Coding,Guangyue Han, Joachim Rosenthal
Room: 126, Session: TUA2
Chair: Wijesuriya P. DayawansaTitle: Patterns in Biology
10:30-11:00 Visual Systems, Bijoy Gosh, A. Pol-pitiya
11:00-11:30 The Dynamics of Avian Kinesis,Lawrence Schovanec, Alan Barhorst, SankarChatterjee
11:30-12:00 Spiral Waves in the Heart, ClydeMartin, P. Marcus
12:00-12:30 Large Amplitude TravellingWaves in Coupled Oscillater Networks,Wijesura P. Dayawansa, Clyde Martin
MTNS – 2002 19
Room: 129, Session: TUA3
Chair: Victor Vinnikov, Joseph A. BallTitle: Minicourse A: MultidimensionalSystems
10:30-11:30 Overdetermined Multidimen-sional Systems and Applications, VictorVinnikov
11:30-12:30 Overdetermined Multidimen-sional Systems and Applications, JosephA. Ball
Room: 136, Session: TUA4
Chair: Lars Gruene, Fabian WirthTitle: Input-to-State Stability, Part I
10:30-11:00 Attractors, Input-to-State-Stability, and Control Sets, Fritz Colonius,W. Kliemann
11:00-11:30 Output-Input Stability of Non-linear Systems and Input/Output Oper-ators, Daniel Liberzon, Eduardo Sontag
11:30-12:00 A Parameter-Robust Observeras an Application of ISS Techniques,Madalena Chaves
12:00-12:30 Quantitative Aspects of theInput-to-state Stability Property, LarsGruene
Room: 208, Session: TUA5
Chair: Anders RantzerTitle: Linear Systems
10:30-10:50 A New Property of La-guerre Functions, Luigi Fortuna, RiccardoCaponetto, Mattia Frasca
10:50-11:10 Communication-Limited Stabil-isability of Jump Markov Linear Sys-tems, Girish Nair, Subhrakanti Dey, RobinEvans
11:10-11:30 Equivalence of Finite PoleAssignability of LTI Singular Systemsby Output Feedback, Runyi Yu, DianhuiWang
11:30-11:50 On Kalman Models over a Com-mutative Ring, Vakhtang Lomadze
11:50-12:10 On Rosenbrock Models over aCommutative Ring, Vakhtang Lomadze
12:10-12:30 Inclusion of Frequency DomainBehaviors, Stephen Prajna, Pablo A. Parrilo
Room: 209, Session: TUA6
Chair: Viswanath RamakrishnaTitle: Quantum Engineering I
10:30-11:10 A Numerical Approach to theDesign of Strongly Modulating Pulses toImplement Precise Effective Hamiltoni-ans for Quantum Information Process-ing, Timothy Havel, Nicolas Boulant, DavidG. Cory, Evan M. Fortunato, Marco A. Pravia,Grum Teklemariam
11:10-11:50 System Theoretic Aspects ofNMR Spectroscopy , Raimund J. Ober
11:50-12:10 Local and Global Control of Pop-ulation Transfer in Quantum Systems,Vladimir Malinovsky
12:10-12:30 Hartree-Fock Models in Elec-tronic Structure Computations, GabrielTurinici
Room: 210, Session: TUA7
Chair: Stephen Campbell, Ramine NikoukhahTitle: Robust Estimation, Identification,and Detection
10:30-11:00 A Survey of Input-Output Meth-ods in Robust Estimation, Babak Hassibi
11:00-11:30 Robust Least-Squares Filteringwith a Relative Entropy Constraint,Bernard Levy, Ramine Nikoukhah
11:30-12:00 Bounding the Solution Set ofUncertain Linear Equations: a ConvexRelaxation Approach, Giuseppe Calafiore,Laurent El Ghaoui
12:00-12:30 The Design of Auxiliary Sig-nals for Robust Active Failure Detectionin Uncertain Systems, Stephen Campbell,Ramine Nikoukhah
MTNS – 2002 20
Middle:
Room: 102, Session: TUM1
Chair: Daniel CostelloTitle: Design and Analysis of BlockCodes, Part II
14:00-14:30 On a Few Classes of Optimal andNear-optimal Polynomial Codes, Nuh Ay-din
14:30-15:00 Building Low-Density Parity-Check Codes with Affine Permuta-tion Matrices, Michael O’Sullivan, MarcusGreferath, Roxana Smarandache
15:00-15:30 On Plotkin and Elias Bounds forCodes over Frobenius Rings under theHomogeneous Weight, Marcus Greferath
15:30-16:00 Four and Six-Dimensional SignalConstellations from Algebraic Lattices,Carmelo Interlando, Michele Elia
Room: 126, Session: TUM2
Chair: Raimund OberTitle: Immunology 1: Introduction andMicroscopy
14:00-14:40 Introduction to Workshop andOverview, Raimund Ober
14:40-15:20 T Cell Receptor MHC Interac-tions: An Overview, E. Sally Ward
15:20-16:00 Image Formation and Deconvo-lution for 3 Dimensional Microscopy ofCell Samples, Jose Angel Conchello
Room: 129, Session: TUM3
Chair: Krzystof Galkowski, Eric Rogers, Vic-tor VinnikovTitle: Multidimensional Systems 1
14:00-15:00 2D Linear Control Systems -From Theory to Experiment to Theory,Eric Rogers, Tarek Al-Towlem, James Rad-cliffe, Paul Lewin, Krzysztof Galkowski, DavidOwens
15:00-15:30 Stability Analysis of 2D Dynam-ics in Roessers Model, Tatsushi Ooba, Ya-suyuki Funahashi
15:30-16:00 Algebraic Algorithm for 2D Sta-bility Test Based on a Lyapunov Equa-tion, Minoru Yamada, Li Xu, Osami Saito
Room: 208, Session: TUM4
Chair: Joseph A. Ball, Hugo WoerdemanTitle: Recent Developments on Interpola-tion and Completion Problems
14:00-14:20 Feedback Control for Multidi-mensional Systems and InterpolationProblems for Multivariable Functions,Joseph A. Ball, Tanit Malakorn
14:20-14:40 On the Caratheodory-Fejer In-terpolation Problem for GeneralizedSchur Functions, Vladimir Bolotnikov
14:40-15:00 Abstract Interpolation in Scat-tering Setting, Alexander Kheifets
15:00-15:20 A Convex Optimization Ap-proach to Generalized Moment Prob-lems, Anders Lindquist, C. I. Byrnes
15:20-15:40 Extremal Properties of OuterFactors, Scott McCullough
15:40-16:00 On the Realization of InverseStieltjes Functions, E. R. Tsekanovskii,Sergey Belyi, Seppo Hassi, Henk de Snoo
Room: 209, Session: TUM5
Chair: Damir ArovTitle: Control of Distributed ParameterSystems
14:00-14:30 Optimal Control and RiccatiEquations for a Degenerate ParabolicSystem, Jean-Marie Buchot, Jean-PierreRaymond
14:30-15:00 Nonlinear Predictive Control ofFlexible Manipulator Systems, Alaa Mo-hamedy, Andrzej Ordys, Michael Grimble
15:00-15:30 Furtivity and Masking Problemsin Acoustics, Francesco Zirilli
15:30-16:00 Approximation of Optimal Con-trols for Semi-Linear Parabolic PDE bySolving Hamilton-Jacobi-Bellman Equa-tions, Sophie Gombao
MTNS – 2002 21
Room: 210, Session: TUM6
Chair: Anders LindquistTitle: Filtering and Identification
14:00-14:20 System Identification of Nonlin-ear Dynamic Systems with Multiple In-puts and Single Output Using Discrete-Time Volterra Type Equations, ThomasTreichl, Stefan Hofmann, Dierk Schroder
14:25-14:45 Data Driven Local Coordinates,Thomas Ribarits, Manfred Deistler, BernardHanzon
14:50-15:10 Using Rank Order Filters to De-compose the Electromyogram, DawnleeRoberson, Cheryl Schrader
15:15-15:35 Conditioning Analysis of a Con-tinuous Time Subspace-Based ModelIdentification Algorithm, Juan CarlosMartinez-Garcia, G.H. Salazar-Silva, R. Gar-rido
15:40-16:00 On Model and State Estimationunder Mixed Uncertainty, Irina Digailova,Alexander B.Kurzhanski
Afternoon:
Room: 102, Session: TUP1
Chair: Heide Gluesing-LuerssenTitle: Convolutional Codes
16:30-17:00 Construction and Decoding ofStrongly MDS Convolutional Codes, Rox-ana Smarandache, Heide Gluesing-Luerssen,Joachim Rosenthal
17:00-17:30 On Observers and Behaviors,Paul A. Fuhrmann
17:30-18:00 On the Convergence of Non-systematic Turbo Codes, Daniel CostelloJr., Adrish Banerjee, Francesca Vatta, BartoloScanavino
18:00-18:30 Some Small Cyclic Convolu-tional Codes, Heide Gluesing-Luerssen, Wi-land Schmale, Melissa Striha
Room: 126, Session: TUP2
Chair: Raimund OberTitle: Immunology 2: Microscopy andBiophysics
16:30-17:10 Microscopic Investigation ofSynapse Formation, Michael Dustin
17:10-17:50 Studying Protein-Protein Inter-actions: Biosensor Technology, PeterSchuck
17:50-18:30 Protein Dynamics Near Mem-brane Surfaces: New Aspects of LocalCoupled Reaction and Transport, NancyL. Thompson
Room: 129, Session: TUP3
Chair: Krzystof Galkowski, Eric Rogers, Vic-tor VinnikovTitle: Multidimensional Systems 2
16:30-17:00 State Representation of nD Be-haviors, Isabel Bras, Paula Rocha
17:00-17:30 The Bang-Bang Principle for theGoursat-Darboux Problem, Dariusz Id-czak
17:30-18:00 Elimination of Anticipation ofSingular 2D Roesser Model, Tadeusz Kac-zorek
18:00-18:30 Difference Equations and n-DDiscrete Systems, Jiri Gregor
Room: 136, Session: TUP4
Chair: Matthias KawskiTitle: Nonlinear Systems and Control 3
16:30-16:50 Disturbance Attenuation for aClass of Nonlinear Systems by OutputFeedback, Wei Lin, Xianqing Huang, Chun-jiang Qian
16:50-17:10 A Linear Controller for a Mul-tifrequency Model of a Pulse-Width-Modulated Cuk Converter, Yusuf Fuad,J.W. van der Woude, W.L. de Koning
17:10-17:30 Synergetic Synthesis of Nonlin-ear Kinematics Regulators for MobileRobots, Boris Topchiev
17:30-17:50 On the Convergence of a Feed-back Control Strategy for MultilevelQuantum Systems, Paolo Vettori
18:10-18:30 Global Output Feedback Controlwith Disturbance Attenuation for a Classof Nonlinear Systems, Xianqing Huang, WeiLin
MTNS – 2002 22
Room: 209, Session: TUP5
Chair: Ruth CurtainTitle: Infinite Dimensional Systems
16:30-17:00 Observability Analysis of a Non-linear Tubular Reactor, Cedric Delattre,Denis Dochain, Joseph Winkin
17:00-17:30 A Hilbert Space Approach toSelf-Similar Systems, Mamadou Mboup
17:30-18:00 Boundary Observability in theQuasi-Static Thermoelastic ContactProblem, Michael Polis, Irina Sivergina
18:00-18:30 Modeling Distributed Parame-ter Systems with Discrete Element Net-works, Fabien Soulier, Patrick Lagonotte
Room: 210, Session: TUP6
Chair: Avraham FeintuchTitle: Robust and H-Infinity Control andEstimation
16:30-16:50 Simultaneous Robust Regulationand Robust Stabilization with DegreeConstraint, Ryozo Nagamune
16:50-17:10 Closed-Loop Structure of Dis-creteTime H-infinity Controller, Wa-ree Kongprawechnon, Shun Ushida, HidenoriKimura
17:10-17:30 On a Recursive State-space Method for Discrete-time H2-Approximation, Ralf Peeters, Martine Olivi,Bernard Hanzon
17:30-17:50 PID Robust Control via GeneticAlgorithms and Integral Criteria Mini-mization, Catalin Nicolae Calistru, Oana Ge-man
17:50-18:10 MIMO Systems PropertiesPreservation under SPR Substitutions,Juan Carlos Martinez-Garcia, G. Fernandez-Anaya
18:10-18:30 State Feedback Mixed H2/H-Infinity Problem for Linear Systems withFinite Jumps, Vasile Dragan, Adrian Stoica
20:00–22:00 Room : 102
Workshop on Open Problems in Sys-tems Theory
Chairs: Anders Rantzer, Eduardo Sontag andJan C. Willems
Wednesday August 14, 2002
8:00-9:00 Room : 101 Plenary Talk
J. William Helton,Manipulating Matrix Inequalities Auto-matically
9:00-10:00 Room : 101 Invited Talk
Jan C. Willems,Dissipative Distributed Systems
9:00-10:00 Room : 102 Invited Talk
Albert-Laszlo Barabasi,The Architecture of Complexity: Emer-gence of Scaling in Complex Networks
9:00-10:00 Room : 136 Invited Talk
Knut Hueper,The Dynamics of Matrix Eigenvalue Al-gorithms
Morning:
Room: 102, Session: WA1
Chair: Raimund OberTitle: Immunology 3: Structure and Ki-netics
10:30-11:10 Geometrical Methods in Struc-tural Molecular Biology, Timothy F. Havel
11:10-11:50 Kinetic aspects of TcR-MHC andAntibody-Antigen Interactions, JeffersonFoote
11:50-12:30 Biophysical Considerations ofT-Cell Receptor-Peptide/MHC Interac-tions, Brian M. Baker

MTNS – 2002 23
Room: 126, Session: WA2
Chair: Martin HaenggiTitle: Computer Networks
10:30-10:50 Min-Plus System Theory Ap-plied to Communication Networks,Patrick Thiran, Jean-Yves Le Boudec
10:55-11:15 Elements of Probabilistic Net-work Calculus for Packet Scale RateGuarantee Nodes, Milan Vojnovic, Jean-Yves Le Boudec
11:20-11:40 Statistical Performance Analysisof a Generalized Processor Sharing Sys-tem by Using Large Deviations, Min Xie,Martin Haenggi
11:45-12:05 Resource Allocation and Con-gestion Control in Distributed SensorNetworks - a Network Calculus Ap-proach, Jinsong Zhang, Kamal Premaratne,Peter Bauer
12:10-12:30 Optimal Media Streaming in aRate-Distortion Sense For GuaranteedService Networks, Olivier Verscheure, Pas-cal Frossard
Room: 129, Session: WA3
Chair: Eric RogersTitle: Minicourse B: MultidimensionalSystems
10:30-11:10 Recent Results on Multidimen-sional Behaviors, Eva Zerz
11:10-11:50 Motivation and General Con-cepts in Behavioral Systems, Jan C.Willems
11:50-12:30 Similarities/Differences betweenthe Behavioral Approach for Multidi-mensional versus Delay-Differential Sys-tems, Heide Gluesing-Luerssen
Room: 136, Session: WA4
Chair: Paul Van DoorenTitle: Model Reduction
10:30-10:50 An Overview of Model Reduc-tion Methods for Large-Scale DynamicalSystems, Thanos Antoulas
10:50-11:10 Analysis of Smith-Type Methodsfor Lyapunov Equations and BalancedModel Reduction, Dan Sorensen
11:10-11:30 Krylov Subspace Techniques forReduced Order Modeling of NonlinearDynamical System, Daniel Skoogh, ZhaojunBai
11:30-11:50 Model Reduction of Second Or-der Systems,
Younes Chahlaoui, D. Lemonnier, K. Meerbergen,A. Vandendorpe, P. Van Dooren
11:50-12:10 Model Reduction via TangentialInterpolation, Antoine Vandendorpe, K. Gal-livan, P. Van Dooren
Room: 208, Session: WA5
Chair: Daniel Alpay, Yuli EidelmanTitle: Time-Varying Systems and Numer-ical Problems
10:30-11:00 Unbounded J-inner Sections,Patrick Dewilde, Daniel Alpay
11:00-11:30 Linear Time-Varying DarlingtonSynthesis, Avraham Feintuch
11:30-12:00 Reduction to System Methodsfor Inversion of Diagonal Plus Semisep-arable Operator Matrices, Yuli Eidelman,Israel Gohberg
Room: 209, Session: WA6
Chair: Erik VerriestTitle: Nonlinear Systems and Control 4
10:30-11:00 Parameter Tuning of a Non Inte-ger Order PID Controller, Luigi Fortuna,Riccardo Caponetto, Domenico Porto
11:00-11:30 Nonlinear Discrete-Time Ob-server Design with Linearizable Er-ror Dynamics, MingQing Xiao, NikolaosKazantzis, Costas Kravaris, Arthur J Krener
11:30-12:00 Analysis of Periodic Solutions ofTapping-Mode AFM: An IQC Approach,Murti Salapaka, Abu Sebastian
12:00-12:30 Bifurcations of the ControlledEscape Equation, Tobias Gayer
MTNS – 2002 24
Room: 210, Session: WA7
Chair: Rodolphe SepulchreTitle: Discrete Event and Hybrid Systems
10:30-10:50 Switched Systems that are Peri-odically Stable may be Unstable, JacquesTheys, Vincent Blondel, Alexander Vladimirov
10:50:11:10 The Servo Problem for Piece-wise Linear Systems, Stefan Solyom, AndersRantzer
11:10-11:30 Stability of Hybrid ControlSystems Based on Time-State ControlForms, Yoshikatsu Hoshi, Mitsuji Sampei,Shigeki Nakaura,
11:30-11:50 Discrete-Time Modeling andAnalysis of Pulse-Width-ModulatedSwitched Power Converters, Willem L.De Koning
11:50-12:10 On the Control of the Reso-nant Converter: A Hybrid-Flatness Ap-proach, Hebert Sira-Ramirez, Ramon Silva-Ortigoza
12:10-12:30 Controllability of PeriodicallySwitched Linear Systems with Delay inControl, Guangming Xie, Long Wang, YijingWang
Middle:
Room: 102, Session: WM1
Chair: Raimund OberTitle: Immunology 4: Diffusion and Mod-elling
14:00-14:40 Measuring Lateral Diffusion andAssociations of MHC Molecules in Mem-branes of the ER and at the Cell Surface,Michael Edidin
14:40-15:20 A Computational Model for TCell Receptor Signal Integration, MarkAlber, Arancha Casal, Cenk Sumen, TimReddy, Mark Davis, Peter Lee
15:20-16:00 Immunological Synapse Forma-tion: A Crossroad of Physical Chemistryand Cell Biology, Arup K. Chakraborty
Room: 126, Session: WM2
Chair: Aleksandar KavcicTitle: Control and Communications
14:00-14:20 Feedback Capacity, SekharTatikonda, Sanjoy Mitter
14:20-14:40 Sum-Product Algorithm andFeedback Capacity, Shaohua Yang, Aleksan-dar Kavcic
14:40-15:00 Kalman Filtering, FactorGraphs, and Electrical Networks, Pas-cal O. Vontobel, Dani Lippuner, Hans-AndreaLoeliger
15:00-15:20 Kalman Filtering Applied toTiming Recovery in Tracking Mode, PanuChaichanavong, Brian Marcus
15:20-15:40 Lower Bounds for the Perfor-mance of Iterative Timing Recovery atlow SNR, Aravind Nayak, J. Barry, S.McLaughlin
15:40-16:00 Classical Capacity of QuantumChannels, Navin Khaneja
Room: 129, Session: WM3
Chair: Krzystof Galkowski, Eric Rogers, Vic-tor VinnikovTitle: Multidimensional Systems 3
14:00-15:00 Conservative MultidimensionalSystems: A Survey, Joseph A. Ball
15:00-15:30 On J-Conservative Scattering nDSystem Realizations, Dmitry Kalyuzhniy-Verbovetzky
15:30-16:00 Factorization of M-D PolynomialMatrices for Design of M-D MultirateSystems, Mikhail Tchobanou, Cynthia Wood-burn
Room: 136, Session: WM4
Chair: Uwe HelmkeTitle: Control and Computation
14:00-14:30 Continuation of Eigendecomposi-tions, Luca Dieci
14:30-5:00 Numerical Solution of EuclideanBalanced Norm Realizations via Gradi-ent Flows, N. Del Buono, L. Lopez
MTNS – 2002 25
15:00-15:30 Controllability of the QR Algo-rithm on Hessenberg Flags, Uwe Helmke,Jens Jordan
15:30-16:00 The Continuos-Time RayleighQuotient Flow on the Grassmann Mani-fold, Rodolphe Sepulchre, P.-A. Absil, R. Ma-hony
Room: 209, Session: WM5
Chair: Anthony BlochTitle: Algebraic and Differential Geome-try in Systems Theory
14:00-14:20 Hamiltonian Structure of theAlgebraic Riccati Equation and its In-finitesimal V-Stability, Nanaz Fathpour,Edmond A. Jonckheere
14:20-14:40 Global Transformation of Non-linear Dynamic Systems into CanonicalForms, Anna Michtchenko, Aleksey Zhirabok
14:40-15:00 A Lie-Group Approach for Non-linear Dynamic Systems Described byImplicit Ordinary Differential Equations,Kurt Schlacher, Andreas Kugi, Kurt Zehetleit-ner
15:00-15:20 Quotients of Fully NonlinearControl Systems, Paulo Tabuada, George J.Pappas
15:20-15:40 The Wave Equation as a Port-Hamiltonian System, and a Finite Di-mensional Approximation, Viswanath Ta-lasila, Goran Golo, Arjan van der Schaft
15:40-16:00 Pseudo Balancing for DiscreteNonlinear Systems, Erik Verriest
Room: 210, Session: WM6
Chair: Panos Antsaklis, Anthony MichelTitle: Hybrid Control System Analysis,Synthesis and Diagnosis
14:00-14:30 Partial Stability of DynamicalSystems,
Ye Sun, A.N. Michel, A.P. Molchanov14:30-15:00 An Approach to General
Switched Linear Quadratic Optimal Con-trol Problems with State Jumps, XupingXu, Panos Antsaklis
15:00-15:30 The Controlled CompositionAnalysis of Hybrid Automata, Ying Shang,M.D. Lemmon
15:30-16:00 Monitoring and Diagnosis ofHybrid Systems Using Particle Filter-ing Methods, Xenofon Koutsoukos, JamesKurien, Feng Zhao
Room: 208, Session: WM7
Chair: Giorgio PicciTitle: Stochastic Systems 2
14:00-14:30 State Space Realization of Ran-dom Processes with Feedback, GiorgioPicci, Alessandro Chiuso
14:30-15:00 Approximate Realization of Hid-den Markov Chains, Lorenzo Finesso
15:00-15:30 Random Sampling of aContinuous-Time Stochastic DynamicalSystem, Mario Micheli, Michael I. Jordan
15:30-16:00 The Hilbert Space of an ErgodicSequence, Giorgio Picci
Afternoon:
Room: 102, Session: WP1
Chair: Raimund OberTitle: Immunology 5: Cellular Aspects
16:30-17:30 Staining Antigen Specific CD4+T -Cells with Class II MHC Oligomers,Lawrence Stern
17:10-17:40 The Roles of Serial Engagementand Kinetic Proofreading in Peptide-Induced T-Cell Activation, Dan Coombs,Carla Wofsy, Byron Goldstein
Room: 126, Session: WP2
Chair: Roxana SmarandacheTitle: Cryptography
16:30-17:00 A High-Speed Processing forRSA Cryptograms Using High-RadixSigned-Digit Numbers and a New Algo-rithm of Modulo Operation, Yoshinori Fu-jisawa, Yasushi Fuwa

MTNS – 2002 26
17:00-17:30 On the Rational Cubic CurveCryptosystems, Xiaochang Wang, HeatherHenkel
17:30-18:00 Public Key Cryptography Basedon Simple Modules over Simple Rings,Gerard Maze, Christopher Monico, Joan-JosepCliment, Joachim Rosenthal
Room: 129, Session: WP3
Chair: Krzystof Galkowski, Eric Rogers, Vic-tor VinnikovTitle: Multidimensional Systems 4
16:30-17:00 Spatial Restoration with Re-duced Boundary Error, Nirmal Bose, Jae-hoon Koo
17:00-17:30 On Succesive Packing Approachto Multidimensional (M-D) Interleaving,Sankar Basu, Xi Min Zhang, Yun Q. Shi
17:30-18:00 Matrix Functions in Homomor-phic Signal Processing, Eduard Krajnik
18:00-18:30 Cellular Automata in ImageProcessing, Adriana Popovici, Dan EmanuelPopovici
Room: 136, Session: WP4
Chair: Biswa Nath Datta, Floyd B. HansonTitle: Large-Scale Computations in Con-trol
16:30-16:50 Projection Methods for ReducedOrder Modeling with Guaranteed Stabil-ity, Thanos Antoulas
16:55-17:15 Computational Methods forPortfolio and Consumption Policy Opti-mization in Log-Normal Diffusion, Log-Uniform Jump Environments, Floyd B.Hanson, J. J. Westman
17:20-17:40 Partial Eigenvalue Assignment inLinear Systems: Existence, Uniquenessand Numerical Solution, Biswa N. Datta,Daniil Sarkissian
17:45-18:05 Model Reduction via an Explic-itly Restarted Lanczos Algorithm, Vasil-ios Papakos, Imad M. Jaimoukha
Room: 208, Session: WP5
Chair: J. William HeltonTitle: Expressing Polynomials as Sums ofSquares Together with Applications
16:30-17:10 How to Write a Polynomial as aSum of Squares of Polynomials, and WhyYou’d Want to Do So, Bruce Reznick
17:10-17:30 Applications of Our NewfoundFacility in Expressing Polynomials asSums of Squares., Pablo A. Parrilo
17:30-17:50 Reduced Representations of Pos-itive Polynomials, Mihai Putinar
17:50-18:10 Recent Progress in PolynomialOptimization, Ruchira Datta
18:10-18:30 Bounding Linear PDEs viaSemidefinite Optimization, ConstantineCaramanis, Dimitris Bertsimas
Room: 209, Session: WP6
Chair: Viswanath RamakrishnaTitle: Quantum Engineering II
16:30-17:10 Optimal Control of Laser Cool-ing: A Theory of Purity IncreasingTransformations, David Tannor, ShlomoSklarz
17:10-17:30 Controllability of Pairs of Cou-pled Quantum Dots, Viswanath Ramakr-ishna
17:30-17:50 Constructive Control of Quan-tum Systems,
Sonia Schirmer, A.D. Greemtree17:50-18:10 Use of Wei-Norman Formulae
and Parameter Differentiation in Quan-tum Control,Claudio Altafini
18:10-18:30 Control of Quantum Mechani-cal Systems with Minimum Number ofSwitches, Domenico D’ Alessandro
20:00–22:00 Room : 102
Panel Discussion on Future Directionsof Research and Teaching in Mathe-matical Control and Systems Theory,
Biswa Datta, Organizer.

MTNS – 2002 27
Thursday August 15, 2002
8:00-9:00 Room : 101 Plenary Talk
Eduardo Sontag,On Systems Molecular Biology and Con-trol Theory
9:00-10:00 Room : 126 Invited Talk
Olof Staffans,Passive and Conservative Infinite-Dimensional Impedance and ScatteringSystems (from a Personal Point of View)
9:00-10:00 Room : 129 Invited Talk
Wolfgang J. Runggaldier,On Stochastic Control in Finance
9:00-10:00 Room : 136 Invited Talk
Matthias Heinkenschloss,Domain Decomposition Approaches forthe Optimization of Distributed Systems
Morning:
Room: 102, Session: THA1
Chair: Mark AlberTitle: Complex Networks and BiologicalApplications 1
10:30-11:10 The Spread of Infections on So-cial Networks, Mark Newman
11:10-11:50 Information Theory Aspects ofSignal Transduction and Gene Regula-tion, Andrea Levchenko
Room: 126, Session: THA2
Chair: Ruth Curtain, Olof StaffansTitle: Distributed Parameter Systems:Theory Part I
10:30-10:50 Some Results on the Theory ofLinear Time-Invariant Dissipative Sys-tems with Hilbert and Pontryagin StateSpaces, Damir Arov
10:55-11:15 Explicit Formulae for J-SpectralFactors for Well-Posed Systems, RuthCurtain, Amol J. Sasane
11:20-11:40 A Riccati Equation Approachto the Standard Infinite-Dimensional H-Infinity Problem, Kalle M. Mikkola, OlofStaffans
11:45-12:05 Sub-optimal Hankel Norm Ap-proximation for the Wiener Class, OrestIftime, Amol Sasane
12:10-12:30 LQG Balancing in Infinite Di-mensions, Mark R. Opmeer, Ruth Curtain
Room: 129, Session: THA3
Chair: J.M. (Hans) SchumacherTitle: Systems and Control Theory in Fi-nance and Insurance 1
10:30-11:30 Control and Financial Engineer-ing, J. M. (Hans) Schumacher
11:30-12:00 Dynamic Risk Sensitive AssetManagement With Nonnegative Multi-ple Factor Constraints, Arunabha Bagchi,K. Suresh Kumar
12:00-12:30 A Filtered No-arbitrage Modelfor Term Structures from Noisy Data,Andrea Gombani, Stefan R. Jaschke, WolfgangJ. Runggaldier
Room: 136, Session: THA4
Chair: David NichollsTitle: Fully Nonlinear, Three-Dimensional, Surface Water Waves inArbitrary Depth
10:30-11:00 Experiments on Deep-WaterWaves with Two-Dimensional SurfacePatterns, Diane Henderson
11:00-11:30 Instability of Bounded Solutionsof the 2-D Cubic Nonlinear SchrodingerEquation, John Carter
11:30-12:00 Computing (quasi) PeriodicWaves in Shallow Water, Bernard Decon-inck
12:30-13:00 Mathematical Models of Deep-Water Waves with two-Dimensional Sur-face Patterns, Harvey Segur

MTNS – 2002 28
Room: 208, Session: THA5
Chair: Krzystof Galkowski, Eric Rogers, Vic-tor VinnikovTitle: Multidimensional Systems 5
10:30-11:00 Robust Stability and Stabiliza-tion of n-D Systems, Jiang-Qian Ying, LiXu, Masayuki Kawamata
11:00-11:30 Succesive stabilization of a classof 2D systems, Krzysztof Galkowski, BartekSulikowski, Eric Rogers, David H. Owens
11:30-12:00 Optimal Control for a Class ofDifferential Linear Repetitive Processes,Eric Rogers, S. Dymkou, M. Dymkov, K.Galkowski, D. H Owens
12:00-12:30 Relation between Eigenvaluesand Singular Values in the Problem ofStability Maintenance of Ellipsoidal Es-timates, Taalaibek A. Akunov, Anatoly V.Ushakov
Room: 209, Session: THA6
Chair: Koichi HashimotoTitle: Globally Stable Robust Visual Ser-voing
10:30-11:00 Keeping Features in the Cam-era’s Field of View: a Visual ServoingStrategy, Graziano Chesi, K. Hashimoto, D.Prattichizzo, A. Vicino
11:00-11:30 Binocular Visual Servoing with aLimited Field of View, Noah Cowan
11:30-12:00 Visual Servoing with Dynamics:Control of an Unmanned Blimp, Jim Os-trowski
12:00-12:30 Enlarging the Stable Region ofImage Based Control by Path Planning,Youcef Mezouar
Room: 210, Session: THA7
Chair: Bill Helton, Andre Ran, Leiba RodmanTitle: Matrix and Operator Equations II
10:30-11:00 Noncommutative Convexity ofFunctions and Sets, J. William Helton
11:00-11:30 Symmetry Groups, SemidefiniteProgramming,and Sums of Squares, PabloA. Parrilo
11:30-12:00 The Symmetric Linear MatrixEquation, Martine C. B. Reurings
12:00-12:30 Investigating Duality on StabilityConditions, Mauricio de Oliveira
Middle:
Room: 102, Session: THM1
Chair: Mark AlberTitle: Complex Networks and BiologicalApplications 2
14:00-14:40 Synchronization of Oscillators inSmall World Systems, Lou Pecora
14:40-15:20 Intracellular signaling is depen-dent on the cytoskeleton. Evidence fromproteomics., Gabor Forgas
15:20-16:00 The Role of Scale-free Connec-tivity Patterns in Spreading Phenomena,Alessandro Vespignani
Room: 126, Session: THM2
Chair: Ruth Curtain, Olof StaffansTitle: Distributed Parameter Systems:Theory Part II
14:00-14:30 Zeros of SISO Infinite-Dimensional Systems, Kirsten Morris,Richard Rebarber
14:30-15:00 Stabilizability of Systems withSignals in `2(Z), Birgit Jacob
15:00-15:30 Stability and Boundedness ofContinuous and Discrete-Time Systems,Hans Zwart, B.Z. Guo
15:30-16:00 Coprimeness Conditions forPseudorational Transfer Functions, Yu-taka Yamamoto
Room: 129, Session: THM3
Chair: J.M. (Hans) SchumacherTitle: Systems and Control Theory in Fi-nance and Insurance 2
14:00-15:00 Ruin Probabilities Minimizationand Dividend Distribution Optimizationin Diffusion Models, Michael Taksar
MTNS – 2002 29
15:00-15:30 Continuous-Time Mean-VariancePortfolio Selection with Markov-Modulated Market Parameters, Xun YuZhou
15:30-16:00 Stock Selection Based on Clus-ter and Outlier Analysis, Steven Craighead,Bruce Klemesrud
Room: 136, Session: THM4
Chair: Paul Van DoorenTitle: Robust Control and Linear MatrixInequalities
14:00-14:30 Linear Matrix Inequalities in Ro-bust Control: A Brief Survey, Venkatara-manan Balakrishnan
14:30-15:00 Periodic Multirate Systems, nu-Gap and Robust Stabilization, Li Qiu, LiChai
15:00-15:30 Spectral Factorization and Sumsof Squares via Semidefinite Program-ming, Hugo Woerdeman
15:30-16:00 Robustness Analysis via Stabil-ity Radii, Spectral Value Sets and mu-Functions, Michael Karow
Room: 208, Session: THM5
Chair: Maria Elena ValcherTitle: The Behavioral Approach to Dy-namic Systems
14:00-14:30 Deterministic Kalman Filtering,Jan C. Willems
14:30-15:00 Over-Determined Systems, EvaZerz
15:00-15:30 Regular Implementability nDBehaviors, Paula Rocha
15:30-16:00 Cones of Trajectories as Sub-sets of Linear Systems: the AutonomousCase, Andrea Morettin
Room: 209, Session: THM6
Chair: Naomi LeonardTitle: Control and Dynamics of Mechani-cal Systems I
14:00-14:20 Composition of Dirac Structuresand Control of Port-Hamiltonian Sys-tems, Arjan van der Schaft, J. Cervera
14:20-14:40 Hamiltonian Attitude Dynamicsfor a Spacecraft with a Point Mass Oscil-lator, Craig Woolsey
14:40-15:00 Controllable Kinematic Reduc-tions for Mechanical Systems: Concepts,Computational Tools, and Examples, An-drew Lewis, Francesco Bullo, Kevin M. Lynch
15:00-15:20 Matching and Stabilization ofLinear Mechanical Systems, DimitriZenkov
15:20-15:40 Matching and Stabilization ofConstrained Systems, Guido Blankenstein
15:40-16:00 Extremal Flows on Stiefel Man-ifolds, and Riemannian Potatoes, PeterCrouch, Anthony M. Bloch
Room: 210, Session: THM7
Chair: Jan van SchuppenTitle: Control and Algebra
14:00-14:30 Control and Algebra - An Intro-duction, Jan H. van Schuppen
14:30-15:00 Towards an Algebraic SystemsTheory of Hybrid Systems, George J. Pap-pas
15:00-15:30 The Category of a Affine Connec-tion Control Systems, Andrew Lewis
15:30-16:00 Coalgebra and Supervisory Con-trol with Partial Observations, JanKomenda
Afternoon:
Room: 102, Session: THP1
Chair: Mark AlberTitle: Complex Networks and BiologicalApplications 3
16:30-17:00 Connections Matter: A BooleanModel for the Segment Polarity Networkof Drosophila Melanogaster, Reka Albert
17:00-17:30 Modeling Mesenchymal Con-densation during Limb Chondrogenesis,Gilberto Tomas
17:30-18:00 Classification of scale-free net-works, Byungnam Kahng
MTNS – 2002 30
18:00-18:30 Prediction of Protein EssentialityBased on Genomic Data, Hawoong Jeoong,Zoltan N. Oltvai and Albert-Laszlo Barabasi
Room: 126, Session: THP2
Chair: Kirsten Morris, Olof StaffansTitle: Distributed Parameter Systems:Stabilization and Control, Part I
16:30-17:00 Reciprocals of Regular LinearSystems: a Survey., Ruth Curtain
17:00-17:30 H-infinity Control of AcousticNoise in a Duct with a Feedforward Con-figuration, Kirsten Morris
17:30-18:00 Positivity and Dissipativity ofOscillating Diffusive Filters, Applicationto the Stability of Coupled Systems, G.Dauphin, Denis Matignon
18:00-18:30 Can Positive Pseudo-DifferentialOperators of Diffusive Type Help Stabi-lize Unstable Systems?, Denis Matignon
Room: 129, Session: THP3
Chair: Tyrone DuncanTitle: Stochastic Theory and Applications
16:30-17:00 An Approach to Stochastic In-tegration for Fractional Brownian Mo-tion in a Hilbert Space, Tyrone Duncan, B.Pasik-Duncan, J. Jakubowski
17:00-17:30 A Class of Tractable PartiallyObserved Discrete Stochastic Games,William McEneaney
17:30-18:00 Hybrid Stock Models and Pa-rameter Estimation, George Yin, Q. Zhang,K. Yin
18:00-18:30 Jump-Diffusion Stock ReturnModels in Finance: Stochastic ProcessDensity with Uniform-Jump Amplitude,Floyd B. Hanson, J. J. Westman
Room: 136, Session: THP4
Chair: Georg Heinig, Vadim OlshevskiTitle: Computational Methods for Struc-tured Matrices and Applications
16:30-17:00 Split Algorithms for Toeplitzand Toeplitz-plus-Hankel Matrices, GeorgHeinig
17:00-17:30 Structured LDPC Codes, AminShokrollahi
17:30-18:00 Efficient Matrix Computationsin Wideband Communications, PatrickDewilde, Lang Tong, Alle-Jan van der Veen
18:00-18:30 Stable Factorization of Han-kel and Hankel-like Matrices, Vadim Ol-shevsky, Michael Stewart
Room: 209, Session: THP5
Chair: Naomi LeonardTitle: Control and Dynamics of Mechani-cal Systems II
16:30-16:50 On the Ball and Beam Prob-lem: Regulation with Guaranteed Tran-sient Performance and Tracking PeriodicOrbits, Romeo Ortega, Fabio Gomez-Estern,Javier Aracil, Francisco Gordillo
16:50-17:10 Reduction of Controlled La-grangian Systems with Symmetries, DongEui Chang
17:10-17:30 Constrained Mechanical Systemswith Impacts, Patrick Hagerty
17:30-17:50 Adjoints of Hamiltonian Systemsand Iterative Learning Control, Kenji Fu-jimoto, Toshiharu Sugie
17:50-18:10 Controllability of MechanicalSystems with Constraints and Symme-try, Jorge Cortes, Sonia Martinez, Jim P. Os-trowski, Hong Zhang
18:10-18:30 The Use of Information in SwarmMotions of Autonomous Vehicles, JohnBaillieul
Room: 210, Session: THP6
Chair: Jan Willem PoldermanTitle: New Approaches to Adaptive Con-trol
16:30-16:50 Cautious Hierarchical SwitchingControl of Stochastic Linear Systems,Marco Campi, Jaoa Hespanha, M. Prandini
16:50-17:10 Strong Robustness in Multi-Phase Adaptive Control: the BasicScheme, Maria Cadic, Jan Willem Polderman
17:10-17:30 Near Optimal LQR Performancefor Uncertain First Order Systems, DanielMiller, Li Luo
MTNS – 2002 31
17:30-17:50 Self-Tuning Control for Polyno-mial Systems: an Algorithmic Perspec-tive, Iven Mareels
17:50-18:10 Geometry of Adaptive Control,Part II: Optimization and Geodesics, Fe-lipe Pait, Diego Colon
18:10-18:30 Two Scale High Gain AdaptiveControl, Jan Willem Polderman, Iven Ma-reels
19:00—22:00 Banquet Dinner
Center for Continuing Education
Friday August 16, 2002
8:00-9:00 Room : 101 Plenary Talk
Anthony Bloch,Conservative and Dissipative Dynamicsin Classical and Quantum Systems.
9:00-10:00 Room : 101 Invited Talk
Raffaello D’Andrea,A State Space Approach to Control ofSpatially Interconnected Systems
9:00-10:00 Room : 102 Invited Talk
Allen Tannenbaum,Controlled Active Vision in ImageGuided Surgery and Therapy.
9:00-10:00 Room : 126 Invited Talk
Karl Kunisch,From Viscoelastic Fluids to ConstrainedOptimal Control
Morning:
Room: 102, Session: FA1
Chair: Reinhard LaubenbacherTitle: Genetic Networks
10:30-11:00 Biochemistry by Numbers: Mod-eling, Signaling and Genetic Networks,Pedro Mendes, Alberto de la Fuente, PaulBrazhnik, Stefan Hoops
11:00-11:30 Designer Gene Networks, MadsKaern, James J. Collins
11:30-12:00 Function, Design, and Gene Cir-cuitry, Michael A. Savageau
12:00-12:30 Comparative analysis of mathe-matical models of intracellular networks,Vassily Hatzimanikatis, Amit Mehra, MichaelBeste
Room: 126, Session: FA2
Chair: Belinda King, Kirsten MorrisTitle: Distributed Parameter Systems:Stabilization and Control, Part II
10:30-10:50 An Example of Output Regu-lation for Distributed Parameter Sys-tems with Infinite Dimensional Exosys-tem, David Gilliam, Christopher I. Byrnes,Jeff B. Hood, Victor I. Shubov
10:50-11:10 Control of Systems with In-finitely Many Unstable Modes andStrongly Stabilizing Controllers Achiev-ing a Desired Sensitivity, Suat Gumussoy,Hitay Ozbay,
11:10-11:30 Receding Horizon Control andReduced-Order Methods, Ito Kazufumi
11:30-11:50 Some Problems of Control forNonlinear Partial Differential Equations,David Russell
11:50-12:10 Global Stabilization of Systemsof Partial Differential Equations Us-ing Finite Dimensional Controllers, IgorMezic
12:10-12:30 Ouput Regulation of NonlinearSystems with State Delay, Emilia Fridman
MTNS – 2002 32
Room: 129, Session: FA3
Chair: Wolfgang KliemannTitle: Stochastic Control and Estimation
10:30-10:50 Algebraic Optimization Tech-niques for the Estimation of Zero-BetaPricing Models, Bernard Hanzon
10:50-11:10 Trajectory Planning Under aStochastic Uncertainty, Ulf Jonsson, ClydeMartin, Yishao Zhou
11:10-11:30 An Addendum to the Problemof Stochastic Observability, Vasile Dragan,Teodor Morozan
11:30-11:50 Combined Optimization of Port-folio and Risk Exposure of an Insur-ance Company, Daniel Cajueiro, TakashiYoneyama
11:50-12:10 On a Unitary Model for Two-Time Parameter Stationary Processes,Dan Emanuel Popovici
Room: 138, Session: FA4
Chair: Patrick DewildeTitle: Stability and Numerics
10:30-10:50 Parameter Dependent ExtremalNorms for Linear Parameter VaryingSystems, Fabian Wirth
10:50-11:10 On the Sensitivity of AlgebraicRiccati Equations, Ji-guang Sun
11:10-11:30 A Numerically Reliable Methodfor a Neglected but Unsolved Problem:State Feedback Decoupling with Stabil-ity for (A, B, C, D) Quadruples, DelinChu
11:30-11:50 Large Stability Property of Solu-tions of Large-Scale Discrete-Time Sys-tems, Tanya Lukyanova, Anatoliy Martynyuk
11:50-12:10 Pole Placement Under OutputFeedback: A Simplification of the Prob-lem, Michael Schilmoeller, Joyce O’Halloran
12:10-12:30 To the Problem of Constructionof Liapunov Functions for ContinuousLarge Scale Systems, Vitaliy Slyn’ko, Ana-toliy Martynyuk
Room: 208, Session: FA5
Chair: Harry TrentelmanTitle: A Behavioral Approach to Systems,Control and Coding Theory
10:30-10:50 A Behavioral Approach to ListDecoding, Jan Willem Polderman, MargretaKuijper
10:55-11:15 Linear Hamiltonian systems,Paolo Rapisarda, H.L. Trentelman
11:20-11:40 Approximate Time-Controllabilityversus Time-Controllability, Amol Sasane,M.K. Camlibel
11:45:12:05 On a Class of Time-Varying Be-haviors, Madhu Belur, M.K. Camlibel, A.J.Sasane, J.C. Willems
12:10-12:30 Synthesis of Strictly DissipativeSystems and the Strictly SuboptimalState Space H-infinity Control Problem,Harry. L. Trentelman
Room: 209, Session: FA6
Chair: Naomi LeonardTitle: Coordinated Control of VehicleNetworks
10:30-10:50 Stability of Systems of Self-Driven Particles Undergoing PhaseTransitions, A. Stephen Morse
10:50-11:10 Stability Properties of Intercon-nected Vehicles, Vijay Kumar, Herbert Tan-ner, George Pappas
11:10-11:30 Formations with a Mission: Sta-ble Coordination of Vehicle Group Ma-neuvers, Naomi Leonard, Petter Ogren, Ed-ward Fiorelli
11:30-11:50 Coordinated Control Strategiesfor Networked Vehicles: An Applica-tion to Autonomous Underwater Vehi-cles, Joao Sousa, Fernando Pereira
11:50-12:10 Group Shape Feedback Control,Raffaello D’Andrea
12:10-12:30 Hamiltonian Structures for In-teracting Satellites, P.S. Krishnaprasad

MTNS – 2002 33
Room: 210, Session: FA7
Chair: Mrdjan JankovicTitle: Nonlinear Control and Applica-tions
10:30-11:00 Application of NonlinearLyapunov-based Controllers and Ob-servers to Gasoline Direct Injection En-gine Charge and Torque Control, IlyaKolmanovsky
11:00-11:30 Multivariable Extremum SeekingFeedback: Analysis and Design, Kartik B.Ariyur, Miroslav Krstic
11:30-12:00 Stabilization of Sets Parametrizedby a Single Variable: Application toShip Maneuvering, Roger Skjetne, AndrewR. Teel, Petar V. Kokotovic
12:00-12:30 Nonlinear Control and Automo-tive Engine Applications, Mrdjan Jankovic
Middle:
Room: 102, Session: FM1
Chair: Martin HaenggiTitle: Mathematical Theory of Networksand Circuits
14:00-14:20 On Switched Hamiltonian Sys-tems, Arjan van der Schaft, Maurice Heemels,Karin Gerritsen
14:20-14:40 Parameter Influence on the Zerosof Network Determinants, Sven Feldmann
14:40-15:00 Canonical Realizations of LinearTime-Varying Systems, Fred Neerhoff, P.van der Kloet
15:00-15:20 In Search of Sensitivity in Net-work Optimization, Mike Chen, CharuhasPandit, Sean Meyn
15:20-15:40 Dynamic Eigenvalues for ScalarLinear Time-Varying Systems, Pieter Vander Kloet, F.L. Neerhoff
15:40-16:00 Interconnection Structures inPhysical Systems: a Mathematical For-mulation, Goran Golo, Orest V. Iftime, Arjanvan der Schaft
Room: 126, Session: FM2
Chair: Belinda King, Kirsten MorrisTitle: Distributed Parameter Systems:Applications and Computation, Part I
14:00-14:30 Performance Enhancement ofControlled Diffusion Processes by Mov-ing Actuators, Michael Demetriou, NikolaosKazantzis
14:30-15:00 Equilibrium Profiles of TubularReactor Nonlinear Models, M. Laabissi,M. E. Achhab,Joseph Winkin, D. Dochain
15:00-15:30 Control of Electronic Material,Katherine Kime
15:30-16:00 Active Sound Field Attenuationvia Acoustic Arrays, H.T. Banks
Room: 129, Session: FM3
Chair: William HeltonTitle: Operator Theoretic Methods
14:00-14:20 A Nehari Theorem forContinuous-Time FIR Systems, GjerritMeinsma, Mirkin, Zhong
14:25-14:45 Optimal Approximation of Lin-ear Operators: a Singular Value Decom-position Approach, Siep Weiland, HardySiahaan, Anton Stoorvogel
14:50-15:10 Geometrical and Spectral Prop-erties of the Time-Varying Riccati Dif-ference Equation, Nevio Carpanese
15:15-15:35 A Generalization of theWidrow’s Quantization Theorem, Alexan-dru Isar, Dorina Isar
15:40-16:00 Functions of System and TheirPerturbations, Alexey (Olexiy) Tikhonov
Room: 138, Session: FM4
Chair: David NichollsTitle: Nonlinear Surface Water Waves:Theory, Computation and Experiment
14:00-14:30 Numerical Simulation of Blow-up Solutions of the Vector NonlinearSchrodinger Equation, Catherine Sulem
14:30-15:00 Existence Theory for TravelingWater Waves in Three Dimensions,Walter Craig
MTNS – 2002 34
15:00-15:30 Numerical Simulation of Travel-ing Water Waves, David Nicholls
15:30-16:00 Similarities between the Quasi-Bubble and the Generalized Wave Con-tinuity Equation Solutions to the Shal-low Water Equations, John H.Atkinson,Joannes Westerink
Room: 210, Session: FM5
Chair: Lars Gruene, Fabian WirthTitle: Input-to-State Stability, Part II
14:00-14:30 Input-to-state stability of pulsewidth modulated control systems, AndrewTeel, L. Moreau, D. Nesic
14:30-15:00 ISS for Dynamic Inputs, FabianWirth
15:00-15:30 A Relaxation Theorem for Dif-ferential Inclusions with Applications toStability Properties, Yuan Wang, EduardoSontag, B. Ingalls
15:30-16:00 Characterization of the Non-Uniform in Time ISS Property and Ap-plications, Iasson Karafyllis, J. Tsinias
Room: 126, Session: FP2
Chair: Belinda King, Ruth CurtainTitle: Distributed Parameter Systems:Applications and Computation, Part II
16:30-16:50 POD Based Control of Beam Vi-brations: Methodology and Experimen-tal Implementations, Brian Lewis, GregoryP. Hicks
16:50-17:10 A Comparison of Balancing Tech-niques for Reduced Order Controllers forSystems of PDEs, Belinda King, Katie A. E.Camp
17:10-17:30 Modeling and Control Issues As-sociated with Atomic Force Microscopy,Ralph Smith
17:30-17:50 The Effect on Control Design ofa Stabilized Finite Element Approxima-tion for Burgers’ Equation, Belinda King,
17:50-18:10 Functional Gain Computationsfor a 1D Parabolic Equation Using Non-Uniform Meshes., John Burns, Belinda B.King, Lizette Zietsman
18:10-18:30 A Continuous Control DesignMethod, Jeff Borggaard
18:00—20:00 Farewell Party
Center for Continuing Education
MTNS – 2002 35
Abstracts of Presented Talks
Monday August 12, 2002
8:30-9:30 Room : 101 Plenary Talk
Bruce Hajek (University of Illinois)A Basket of System Theoretic Problems inCommunicationsResearchers are currently faced with a rich set of prob-lems in the design and analysis of wireless communica-tion systems and high-speed communication networks.The purpose of this talk is to survey several significantopen problems which system theory could play a rolein solving. The problems include: (a) Providing de-lay constraints in a large communication network ina distributed way, using delay calculus based on themax-plus algebra, (b) Finding the capacity of cellu-lar networks (will survey the recent use of the theoryof large random matrices and related free probabil-ity theory), (c) Predicting efficiency and fairness, anddesigning allocation mechanisms, for the Internet, asthousands of autonomous systems interact throughself-interested pricing and congestion, and (d) Dis-tributing limited routing information in a large amor-phous network, such as a peer-to-peer network or adhoc sensor array, to facilitate position location.
9:30-10:30 Room : 101 Invited Talk
Roger Brockett (Harvard University)Optimal System Identification for NMR Appli-cationsIn a wide variety of settings, the measurement of nu-clear magnetic resonance (NMR) effects has proven tobe a remarkably effective for investigating unknownstructures on both large and small scales. Over theyears a large body of technique has been developed forimproving the sensitivity and resolution of NMR mea-surements and many recent advances in biochemistryand medicine are dependent on the sophisticated sig-nal processing techniques now used routinely. Froma system theoretic perspective, problems in this areacan be thought of as identification problems involv-ing bilinear systems. They are distinguished from lin-ear system identification problems by the fact thatthe quality of the identification is strongly dependentupon the form of the excitatory input applied to thesystem. Many ingenious techniques, such as the “twodimensional” Fourier transform procedure have beendeveloped based on particular types of input patterns.Because of the low signal to noise ratios inherent inNMR, the optimization of such methods requires the
use of stochastic models for the dynamics and mea-surement processes. In this talk we take a fresh look atproblems in this area with a view toward finding com-putational procedures that will determine the inputswhich will optimize specific performance measures. Inparticular, we explore performance measures relatedto conditional entropy, and in this way develop a for-malism for establishing the mathematical limits onwhat can be accomplished with better input design.
9:30-10:30 Room : 102 Invited Talk
Hans-Andrea Loeliger (ETH)Factor Graphs, Least Squares and Kalman Fil-teringFactor graphs are graphical models with origins incoding theory and with close relations to Willems-typebehavioral system theory. The sum(mary)-product al-gorithm, which operates by message passing in thefactor graph, subsumes a great variety of algorithmsin coding, signal processing, and artificial intelligence.In this talk, we apply Forney-style factor graphs to lin-ear models with quadratic cost functions and we showhow general versions of Kalman filtering and recursiveleast squares algorithms arise as instances of the sum-product algorithm. (An ”isomorphism” of such factorgraphs with electrical networks is presented in a sep-arate talk.)
9:30-10:30 Room : 136 Invited Talk
Sjoerd Verduyn Lunel (University of Leiden)Control and Stabilization of Systems withTime DelaysFor dynamical systems governed by feedback laws,time delays arise naturally in the feedback loop torepresent effects due to communication, transmission,transportation or tern effects. The introduction oftime delays in a system of differential equations re-sults in an infinite dimensional state space. In thispaper we give an overview of the basic theory and dis-cuss recent developments concerning the control andstabilization of systems with delays.

MTNS – 2002 36
Morning:
Room: 102, Session: MA1Chair: Shmuel Friedland, Brian MarcusTitle: Capacity of Multi-Dimensional CodesPart I
11:00-13:00 Minicourse on “Capacity of Multi-dimensional Codes”,Shmuel Friedland (University of Illinois at Chicago)A multi-dimensional code (mdc) is a filling of pointswith integer coordinates (lattice) in the d dimensionalspace with a given alphabet according to some rule.Example: put in any point of the lattice either 0 or 1,with the condition that any 1 must be surrounded byzeros. In this talk we review the available techniquesto compute the capacity (density) of mdc.
Room: 126, Session: MA2Chair: Michael D. LemmonTitle: Control Applications
11:00-11:20 Cancer Treatment Using MultipleChemotherapeutic Agents Subject to Drug Re-sistance,John Westman (UCLA),Bruce Fabijonas (Southern Methodist University),Daniel Kern (University of Minnesota),Floyd Hanson (University of Illinois at Chicago)A compartment model for the evolution of cancer sub-ject to multiple chemotherapeutic agents is presented.The formulation accounts for the heterogeneous na-ture of cancer and drug resistance, leading to a sys-tem that can be used as a tool for optimizing treat-ments. Chemotherapeutic or cytotoxic agents havelimited effectiveness due to of toxicity and the devel-opment of drug resistance. Toxicity limits the amountof the agent that can be used and acts as an upperbound on the dosage. Drug resistance causes the clin-ical value of the cytotoxic agent to become nominalafter a small number of treatments. Therefore, sev-eral non-cross resistant cytotoxic agents are used toextend the number of treatments that can be admin-istered.
11:25-11:45 Selection of Decentralized ControlConfigurations Based on Disturbance Rejec-tion for Plants with Real Integrators,Henning Schmidt, Elling Jacobson(KTH)The paper considers the effect of interactions on thedisturbance rejection properties of decentralized con-trol systems. In particular, the problem of selectingthe control structure yielding the best disturbance re-jection under independent tuning of the individual
subsystems is addressed. As a special case we con-sider systems that contain one or more integratorsand which give rise to a number of zero elements inthe transfer-matrix of the overall system.
11:50-12:10 Synergetic Control of the UnstableTwo-Mass System,Alexander Kolesnikov (Taganrod State University,Russia)The paper is devoted to a problem of synergetic reg-ulators synthesis for nonlinear unstable two-mass sys-tem “inverted pendulum”. The different variants ofsynergetic regulators synthesis for this system are pre-sented. Synthesized regulators are constructed on ba-sis of nonlinear mathematical models. The synthe-sized regulators allow not only to solve the pendulumstabilization task at the top unstable position but alsoform the new modes of dynamic behavior such as auto-oscillations of the pendulum and the cart around theset position
12:15-12:35 Synergetic Control for Electrome-chanical Systems,Andrey Popov, Anatoly Kolesnikov, Gennady Veselov,Alexander Kolesnikov (Taganrod State University,Russia);Roger Dougal (University of South Carolina)The paper is devoted to a problem of synergetic reg-ulators synthesis for nonlinear electromechanical sys-tems (EMS). The different variants of synergetic reg-ulators synthesis for such EMS as DC electric drives,asynchronous electric drives and synchronous electricdrives are presented. Synthesized vector regulatorsare constructed on basis of nonlinear mathematicalmodels and ensure to perform the standard techno-logical tasks: angle and angular speed stabilization,torque stabilization etc. Also examples of EMS usingin mechanical oscillator mode and the task of EMS’spower-saving control are considered.
12:40-13:00 Modeling of Out-of-Plane Hygroin-stability of Multi-Ply Paperboard,Gianantonio Bortolin, Per-Olof Gutman (KTH);Bengt NilssonThis paper describes a semi-physical model for thedimensional stability properties (i.e. curl) of the car-ton board produced at AssiDomn Frvi, Sweden. Themain equations are based on classical lamination the-ory of composite materials, and each constituent plyis considered as a macroscopic homogeneous, elasticmedium. The model shows a general agreement be-tween predicted and measured curvatures.

MTNS – 2002 37
Room: 136, Session: MA4Chair: Bill Helton, Andre Ran, Leiba RodmanTitle: Matrix and Operator Equations I
11:00-11:30 Noncanonical Almost Periodic Fac-torization and Toeplitz Operators with AlmostPeriodic Symbols,Leiba Rodman, I. M. Spitkovsky, H. J. Woerdeman(College of William and Mary)Noncanonical factorizations of almost periodic matrixvalued functions of several real variables are studied.In particular, results are proved on behavior of factor-ization indices under small perturbations, connectionsbetween left and right indices, and relations betweenfactorization and Fredholmness properties of the as-sociated Toeplitz operators.
11:30-12:00 Symmetric Nonsquare Factorizationof Selfadjoint Rational Matrix Functions andAlgebraic Riccati Inequalities,A. C. M. Ran Mark A. Petersen(Vrije Universiteit, Amsterdam)In this talk we shall present a parametrization of allsymmetric, possibly nonsquare minimal factorizationsof a positive semidefinite rational matrix function. Itturns out that a pole-pair of such a nonsquare factoris the same as a pole pair for a specific square factor.The location of the zeros In this talk we present aparametrization of all symmetric, possibly nonsquareminimal factorizations of a positive semidefinite ratio-nal matrix function. It turns out that a pole-pair ofsuch a factor is the same as a pole pair for a specificsquare factor. The location of the zeros is determinedby a solution to a certain algebraic Riccati inequal-ity. We also consider the case where the function hasconstant signature. A connection with Bezoutians isdiscussed.
12:00-12:30 Extremal Problems of InterpolationTheory,L. A. SakhnovichWe consider interpolation problems the solutions ofwhich satisfy in addition an extremal condition.Weshow that under some assumptions the extremal in-terpolation problem has a unique solution.We com-pare our approach with optimal and superoptimal ap-proaches. The results of our talk were obtained jointlywith J.W.Helton.
12:30-13:00 Convex Invertible Cones, Nevalinna-Pick Interpolation and the Set of Lyapunov So-lutions,Izchak Lewkowicz, Nir Cohen(Ben-Gurion University of the Negev)For a real matrix A whose spectrum avoids the imag-
inary axis, it is shown that the three following, seem-ingly independent problems, are in fact equivalent.Characterizing the set of real symmetric solutions ofthe algebraic Lyapunov inclusion associated with A.The image of all Nevalinna-Pick interpolations asso-ciated with the spectrum of A. The structure of theConvex Invertible Cone generated by A.
Room: 208, Session: MA5
Chair: Lorenzo Farina, Maria Elena ValcherTitle: Positive Systems
11:00-11:30 Positive Systems in the State SpaceApproach: Main Issues and Recent Results,Lorenzo Farina (Universita di Roma “La Sapienza”)A positive system is a system in which the state vari-ables are always positive in value. In this introductorytutorial paper, basic results on positive systems arereviewed and recent developments and open problemsare addressed.
11:30-12:00 Positive Systems in the BehavioralApproach: Main Issues and Recent Results,Maria Elena Valcher (University of Padova)The aim of this paper is to provide an overview ofthe most significant results about positive systems,obtained within the behavioral approach, and, specif-ically the main results about positive autonomous be-haviors, and to present some new results concernedwith the positive realization problem for controllablebehaviors.
12:00-12:30 Feedback Stabilisation with PositiveControl of Dissipative Compartmental Sys-tems,Georges Bastin, A. Provost(Universite’ Catholique de Louvain)In many process control applications, the system un-der consideration is compartmental and positive. Forsuch systems, the design of state feedback controllersmakes sense only if the control function is guaranteedto provide a non-negative value at any time instant.The purpose of this paper is to present a positivecontrol law for the feedback stabilisation of positivecompartmental systems which are dissipative but cannevertheless be globally unstable. The approach is il-lustrated with an application to an industrial grindingcircuit.

MTNS – 2002 38
12:30-13:00 Feedback Control for a Chemostatwith two Organisms,Patrick De Leenheer, Hal Smith(Arizona State University)It is shown that a chemostat with two organisms canbe made coexistent by means of feedback control ofthe dilution rate.
Room: 209, Session: MA6Chair: Augusto Ferrante, Michele PavonTitle: Control of Quantum Mechanical Systems
11:00-11:30 Sufficient Conditions for Controlla-bility of Finite Level Quantum Systems viaStructure Theory of Semisimple Lie Algebras,Claudio Altafini (ISAS, Italy)The controllability of the unitary propagator of a fi-nite level quantum system is studied in this paper byanalyzing the structure of the semisimple Lie algebrasu(N).
11:30-12:00 Geometric Control of Quantum Me-chanical Systems in a Noisy Environment,Domenico D’Alessandro (Iowa State University)We study the control problem for a general (finite di-mensional) quantum system interacting with a bath.In the Hamiltonian formulation, the overall (Systemplus Environment) system varies on a Hilbert spacewhich is the tensor product of the system and envi-ronment Hilbert spaces. We use sensitivity functionsas a tool to compare control laws and trajectories inthis formulation. We treat the example of a spin 1/2particle in a spin bath in detail. For this system, us-ing optimal control theory and first order sensitivityas the cost, we explicitly derive the minimum deco-herence controls.
12:00-12:30 Control of Quantum Systems UsingModel-based Feedback Strategies,Augusto Ferrante, Michele Pavon(Universita di Padova);Giorgio RaccanelliCoherent control of quantum-mechanical systems is agrowing field due to recent advances in laser technol-ogy and to the miniaturization of electronic devices.We present in this paper a new approach to this prob-lem. We consider feedback control strategies for theSchroedinger equation of a multilevel quantum sys-tem that eventually produce the decrease of the dis-tance between the state (or the propagator) and thetarget. Once the functional form of these controls hasbeen obtained, plugging them into the evolution equa-tion we get a nonlinear initial value problem. When
the nonlinear problem can be numerically solved, wecan construct explicitly the control functions and thenimplement them in open-loop to achieve the desiredtransfer.
12:30-13:00 Quantum Control of Dissipative Sys-tems,Sonia G. Schirmer, A. I. Solomon(The Open University, Milton Keynes)We study the effect of dissipation on one’s ability tocontrol a quantum system. In particular, we showthat dissipation, although often considered undesir-able, opens new possibilities for quantum control byremoving the constraint of unitary evolution, whichrestricts the set of reachable sets and imposes boundson the optimization of observables.
Room: 210, Session: MA7
Chair: Peter BauerTitle: Adaptive Control
11:00-11:20 Gap Metric Robustness of AdaptiveControllers,Mark French (University of Southampton)We consider the construction of adaptive controllersfor minimum phase linear systems which achieve non-zero robustness margins in the sense of the (linear) L2
gap metric. The gap perturbations may be more con-strained for larger disturbances and for larger para-metric uncertainty. Working within the framework ofthe nonlinear gap metric due to Georgiou and Smith,universal adaptive controllers are first given achiev-ing this goal for first order plants, and the resultsare then generalised to relative degree one, minimumphase plants.
11:20-11:40 Adaptive Predictive Control withControllers of Restricted Structure,Michael Grimble, Peter Martin(University of Strathclyde)A novel adaptive predictive optimal controller of loworder, involving a multi-step cost index and future set-point knowledge, is considered. A non-linear system,represented by a set of multiple linear discrete-timestate-space models plus one identified model is to becontrolled. Simulation results applied to a ship roll ex-ample demonstrate that the controller is more robustthan a standard self-tuning scheme, but is capable ofgood performance.

MTNS – 2002 39
11:40-12:00 Output Adaptive Model ReferenceControl of Linear Continuous State-DelayPlant,Boris Mirkin, Per-Olof Gutman(Technion - Israel Institute of Technology)This paper develops a new approach for the outputmodel reference adaptive control of linear continuous-time plants with state delays. The main idea is toinclude into the control law a feedforward componentwhich compensates for the delayed states, in additionto output feedback. The feedforward is formed byspecial adaptively adjusted prefilters as a function ofthe delayed state of the reference model. The outputfeedback component is designed as for a plant with-out delay, but applied to the time-delay plant. Such acontroller structure containing adaptive output errorfeedback and adaptive prefilters from the delayed ref-erence model makes it possible to solve the problemof adaptive exact asymptotic output tracking underparametric uncertainties. The stability is analyzed us-ing the Lyapunov-Krasovskii functional method. Sim-ulation results show the effectiveness of the proposedscheme.
12:00-12:20 A Comparison Between RobustAdaptive Controllers w.r.t a Non–singularTransient Cost,Ahmad Sanei, Mark French(University of Southampton)A nonsingular performance comparison between twostandard robust adaptive control designs based on thedead-zone and projection modifications is given. Aworst case transient cost functional penalising the L-infinity norm of the state, control and control deriva-tive has been chosen as the criterion of comparison. Ifa bound on the L-infinity norm of the disturbance isknown, it is shown that the dead-zone controller out-performs the projection controller when the a-prioriinformation on the unknown system parameter is suf-ficiently conservative. For clarity of the presentation,the result is restricted to scalar systems and the gen-eralisations are only briefly discussed.
12:20-12:40 A Manifold Structure on the set ofFunctional Observers,Jochen Trumpf, Uwe Helmke(Universitat Wurzburg)Assume, a linear function f of the state x of a linearcontrol system in state space form is given. An ob-server for this function is another linear control sys-tem taking the input and the output of the observedsystem as its input and generating from it an esti-mate for f . The observer is called a tracking observerif its state z satisfies the tracking property: when-ever the observer is started with an exact estimate
z(0) = f(x(0)) it will continue to produce an exactestimate z(t) = f(x(t)) for all future times t. It iswell known that a tracking observer for f exists ifand only if the kernel of f is a conditioned invariantsubspace with respect to the observed system. Theset M of tracking observer parameters of fixed size,i.e. tracking observers of fixed order together with thefunctions they are tracking, is shown to be a smoothmanifold. Furthermore, the set of conditioned invari-ant subspaces of fixed codimension together with theirfriends, i.e. the output injections making the subspaceinvariant, is shown to carry a vector bundle structureover M . Potential applications are in the area of poleplacement by dynamic output feedback as well as theanalysis of the convergence behaviour of numerical al-gorithms for observer design.
Middle:
Room: 102, Session: MM1
Chair: Shmuel Friedland, Brian MarcusTitle: Capacity of Multi-Dimensional CodesPart II
14:00-15:00 On the Capacity of 2-D ConstrainedCodes and Consequences for Full-Surface DataChannels,William Weeks (University of Missouri–Rolla)The capacity of two-dimensional constrained binarycodes is bounded by considering strips in the plane ofwidth n and constructing matrix recursions. Curve-fitting and bounding techniques allowe precise esti-mates of the capacity to be made. Finally, by assum-ing that capacity-achieving encoders and decoders ex-ist, density improvements for full-surface channels arecalculated, and those calculations verified by numeri-cal simulation.
15:00-16:00 Counting Independent Sets in theGrid, And Similar Questions,Neil Calkin (Clemson)We shall consider various enumeration questions aris-ing from statistical mechanics: for example, countingthe number of independent sets in an n×k grid, count-ing non-attacking configurations of Kings on an n× kchessboard, etc. We shall show how to prove rigorous(albeit somewhat weak) upper and lower bounds onthe entropy of such systems. We will also introduce aformulation which leads to many open questions aboutthe eigenstructure of recursively defined matrices.

MTNS – 2002 40
Room: 126, Session: MM2Chair: Wei LinTitle: Nonlinear Systems and Control 1
14:00-14:20 Estimating Generalized Gradients ofValue Function in Optimal Control Problemsfor Differential-Difference Inclusions,Leonid Minchenko, Aleksey Volosevich(Belarus State University)This paper deals with the optimal control problems forthe differential- difference inclusions under endpointconstraints. The result obtained employs Clarke’snormal cones and the estimates of generalized gradi-ents of the value function. The method for estimatinggeneralized gradients is developed. These estimatesare used for obtaining necessary optimality conditions.
14:20-14:40 Interconnected Systems of FliessOperators,W. Steven Gray, Yaqin Li(Old Dominion University)Given two analytic nonlinear input-output systemsrepresented as Fliess operators, four system intercon-nections are considered in a unified setting: the par-allel connection, product connection, cascade connec-tion and feedback connection. In each case, the cor-responding generating series is produced, when oneexists, and conditions for convergence of the corre-sponding Fliess operator are given. In the process, anexisting notion of a composition product for formalpower series is generalized to the multivariable set-ting, and its set of known properties is expanded. Inaddition, the notion of a feedback product for formalpower series is introduced and characterized.
14:40-15:00 Controllability Analysis of A TwoDegree of Freedom Nonlinear Attitude Con-trol System,Jinglai Shen, Amit K. Sanyal, N. Harris McClamroch(The University of Michigan)We study a physically simple two degree of freedom at-titude control system that has a single control input.The physical assumptions are described. Equationsof motion are derived and expressed in a nonlinearcontrol form. We demonstrate that the system is in-herently nonlinear. Conditions for small time localcontrollability of the state and of the configurationare presented.
15:00-15:20 Sliding Mode Idle Speed IgnitionControl Strategies for Automotive Engines,Manjit Singh Srai(U of Central England in Birmingham),H. Sindano (Sagem-Johnson, Birmingham),N. E. Gough (University of Wolverhampton)
, A. C. Cole (U of Central England in Birmingham)A potentially improved class of systems involves slid-ing mode control, in which the actuating signal ischanged discontinuously, depending on the position ofthe system trajectory in state space, forces the statetrajectory to track a defined hyperplane towards thedesired steady-state. This affords the opportunity ofsimplifying the complex and uncertain processes thatoccur within SI engines and to develop new methodsof controlling their performance.
15:20-15:40 Truncation and Approximation Er-rors in the Max-Plus Algorithm for H-infinityControl,William McEneaney(University of California, San Diego)We consider the H-infinity problem for a nonlinearsystem. The semi-group is linear over the max-plusalgebra. The value function is an eigenfunction cor-responding to the max-plus multiplicative identity.One may truncate an expansion to obtain a finite-dimensional problem. We obtain some error estimatesfor the size of the errors introduced by this basis trun-cation, and consider errors introduced by the approx-imation of the elements of the matrix.
15:40-16:00 Solution of Second Order Lineariza-tion,Rajagopalan Devanathan(Nanyang Technological University, Singapore)For a nonlinear system with a control input, a gen-eralized form of the homological equation can be for-mulated to reduce the system to its normal form. Inthis paper, it has been shown that for a linearly con-trollable system with an appropriate choice of statefeedback, the generalized homological equation can besolved to give an explicit solution, of a reduced order,to the problem of second order linearization.
Room: 129, Session: MM3Chair: Giorgio Picci, Augusto FerranteTitle: Stochastic Systems 1
14:00-14:30 Canonical Correlations Between In-put and Output Processes of Linear StochasticModels,Katrien De Cock, Bart De Moor(Universite Catholique de Louvain)We obtain expressions for the principal angles betweenthe row spaces of input and output data block Hankelmatrices of a linear stochastic model in terms of themodel parameters. The canonical correlations of thecorresponding processes are equal to the limiting val-

MTNS – 2002 41
ues of the cosines of the principal angles. From theseparametric expressions, the relations between the dif-ferent sets of canonical correlations can be easily de-duced.
14:30-15:00 A Regularized Cepstrum and Co-variance Matching Method for ARMA(n,m)Design,Per Enquist(LADSEB/CNR Padova, Italy)An ARMA(n,m) model is uniquely determined by itsn first covariances and m first cepstrum coefficients.However, there does not always exist a model match-ing an estimated set of these parameters. We proposea method determining an asymptotically stable mini-mum phase model that match the covariances exactlyand the cepstrum parameters approximatively. A con-vex barrier term is used for regularization and themodel is determined by a convex optimization prob-lem.
15:00-15:30 On Some Interpolation Problems,Gyorgy Michaletzky(Eotvos Lorand University, Budapest),A. Gombani (LADSEB-CNR Padova, Italy)Some aspect of the partial realization problem formu-lated for Schur-functions considered on the right halfplane is investigated. We show among others that inthe linear fractional parameterization of all solutionsthe condition on the McMillan-degree of the solutionis transformed into an interpolatiom condition. Thisanalysis can be considered to be partially complemen-tary to the results of A. Lindquist, C. Byrnes et al.on Carathodory functions.
15:30-16:00 Non-regular Processes and SingularKalman Filtering,Augusto Ferrante, Stefano Pinzoni, Giorgio Picci(Universita di Padova)Contrary to the continuous-time case, a discrete-timeprocess y can be represented by minimal linear mod-els, which may either have a non-singular or a singularD matrix. In fact, models with D=0 have been com-monly used in the statistical literature. On the otherhand, for models with a singular D matrix the Ric-cati difference equation of Kalman filtering involvesin general the pseudo-inversion of a singular matrix.This “cheap filtering” problem has been studied forseveral decades in connection with the so-called “in-variant directions” of the Riccati equation. For a sin-gular D, a reduction in the order of the Riccati equa-tion is in general possible. In this paper, we providean explanation of this phenomenon from the classicalpoint of view of “zero flippin” among minimal spec-tral factors. Changing D’s occurs whenever zeros are
“flipped” from z = ∞ to their reciprocals at z = 0.It is well known that for finite zeros the zero-flippingprocess takes place by multiplication of the underly-ing spectral factor by a suitable rational all-pass ma-trix function. For infinite zeros, zero-flipping is imple-mented by a dual version of the Silverman structurealgorithm. Using this interpretation, we derive a newalgorithm for filtering of non-regular processes, basedon a reduced-order Riccati equation.
Room: 136, Session: MM4Chair: I. Gohberg, M.A. KaashoekTitle: State Space Methods for Problems in Op-erator Theory
14:00-14:30 State Space Methods, ReproducingKernel Spaces and Applications,Harry Dym (The Weizmann Institute)There is a natural connection between finite dimen-sional reproducing kernel Hilbert and Krein spacesand state space theory which underlies many prob-lems that have been investigated in the last severalyears. The purpose of this talk is to explain this con-nection and illustrate it by means of examples drawnlargely from problems of interpolation, extension andfactorization, as time permits. The talk will be ex-pository.
14:30-15:00 A Beurling–Lax Type Theorem inthe Unit Ball,Daniel Alpay, Aad Dijksma, Jim Rovnyak(Ben-Gurion University of the Negev)Schur multipliers on the unit ball are operator-valuedfunctions for which the N -variable Schwarz-Pick ker-nel is nonnegative. In this paper, the coefficient spacesare assumed to be Pontryagin spaces having the samenegative index. The associated reproducing kernelHilbert spaces are characterized in terms of general-ized difference-quotient transformations.
15:00-15:30 A Naimark Dilation Perspective onPositive Real Interpolation,A. Frazho (Purdue University)No Abstract15:30-16:00 State Space Method, Explicit Solu-tions of Scattering Problems, and NonlinearIntegrable Equations,Alexander L. SakhnovichWe review recent results on the canonical differen-tial systems with the pseudo-exponential potentials(and related nonlinear integrable equations) that in-volve applications of state space techniques. Such sys-

MTNS – 2002 42
tems are characterized by the requirement that theassociated Weyl function is a bi-proper positive-realstable rational matrix function. Explicit formulas forthe fundamental solution, the spectral and scatteringfunctions and bound states are derived.
Room: 208, Session: MM5
Chair: Xiaochang WangTitle: Output Feedback Control of Linear Sys-tems
14:00-14:30 Counterexamples to Pole Placementby Real Static Output Feedback,Alex Eremenko, A. Gabrielov(Purdue University)We consider linear systems with m inputs, p outputsand McMillan degree n controlled by static outputfeedback with a gain matrix K. The pole placementmap for such system is given by
MatR(m× p) → PolyR(mp),K 7→ ψK = det(λI −A−BKC),
where A ∈ MatR(n × n), B ∈ MatR(n × m) andC ∈ MatR(p×n) are real matrices, and PolyR(mp) isthe set of monic polynomials of λ of degree mp withreal coefficients.We say that for a given triple of integers (m,n, p)the pole placement map is generically surjective ifthere is a dense open set of systems (A,B,C) ∈MatR(n×n)×MatR(n×m)×MatR(p×n) such thatthe image of the map (??) contains an open densesubset of PolyR(mn).It was known that mp ≥ n is necessary and mpn issufficient for generic surjectivity. It was also knownthat the real pole placement map is not genericallysurjective for (m, p) = (2, 2) and (2, 4). We extendthis result:Theorem. For every pair (m, p) of even integers,there exists an open set U of systems S = (A,B,C)with m inputs, p outputs and McMillan degree mp,such that for every S ∈ U the real pole placementmap (1) omits an open set in PolyR(mp).The open set U in this theorem is a neighborhood ofa system S0 defined by a rational curve in the Grass-mannian G(m,m+ p) which osculates the normal ra-tional curve in the projective space RPm+p−1. Theomitted subset in PolyR(mp) is a neighborhood of aset of polynomials whose zeros belong to a circle or-thogonal to the real line.
14:30-15:00 Numerical Homotopy Algorithmsfor Satellite Trajectory Control by Pole Place-ment,Jan Verschelde, Yusong Wang(University of Illinois at Chicago)The aim of this paper is to illustrate the application ofnumerical homotopy algorithms to control the trajec-tory of a satellite. We design output feedback laws viapole placement. The output feedback laws are com-puted by numerical homotopy algorithms, which arebased on enumerative geometry. We combine the useof MATLAB with PHCpack.
15:00-15:30 Numerical Schubert Calculus by thePieri Homotopy Algorithm,Tien-Yien Li, Xiaoshen Wang, Mengnien Wu(Michigan State University)Some control theory and enumerative geometry prob-lems can be formulated as follows. Given linear sub-spaces L1, ..., Ln (of certain vector space, satisfyingcertain conditions), find all subspaces of certain di-mension which intersect the given subspaces non triv-ially. We derived a modified Pieri homotopy algorithmfor numerically finding all the solutions. In the pro-cess, all polynomial systems to be solved are squaresystems.
15:30-16:00 On Minimal Order DecentralizedOutput Feedback Pole Assignment Problems,Xiaochang Wang (Texas Tech University)We give a new sufficient condition for the arbitrarypole assignability of a system by decentralized dy-namic compensators. Using such condition we areable to derive a new bound on the degrees of de-centralized dynamic compensators so that the genericsystems have the arbitrary pole assignability.
Room: 209, Session: MM6Chair: Yutaka YamamotoTitle: Optimization and Optimal Control
14:00-14:20 A Jacobi-like Method for the Indef-inite Generalized Hermitian Eigenvalue Prob-lem,Christian Mehl (Technical University of Berlin)Indefinite generalized Hermitian eigenvalue problemsarise in many applications, for example in the linearquadratic optimal control problem. In this talk, wepropose a Jacobi-like algorithm for the solution of theindefinite generalized Hermitian eigenvalue problemand discuss its convergence properties. Moreover, nu-merical examples will be presented.

MTNS – 2002 43
14:20-14:40 Disturbed Discrete Time Linear-Quadratic Open-Loop Nash games,Gerhard Jank, Dirk Kremer(RWTH Aachen)We examine disturbed linear-quadratic games, whereeach player chooses his strategy according to a mod-ified Nash equilibrium model under open-loop infor-mation structure. We give conditions for the existenceand uniqueness of such an equilibrium. We also showhow these conditions are related to certain Riccati dif-ference equations and a boundary value problem.
14:40-15:00 Linear Matrix Inequalities forGlobal Optimiztion of Rational Functions andH2 Optimal Model Reduction,Dorina Jibetean (CWI, Amsterdam),Bernard HanzonIn this paper we study unconstrained global optimiza-tion of rational functions. We give first few theoreticalresults and study then a relaxation of the initial prob-lem. The relaxation is solved using LMI techniques.Therefore, in general our procedure will produce alower bound of the infimum of the original problem.The algorithm is then applied to the H2 optimal modelreduction problem.
15:00-15:20 Newton’s Method for Optimizationin Jordan Algebras,Sandra Ricardo(University of Tras-os-Montes e Alto Douro,Portugal),Uwe Helmke, Shintaro Yoshizawa(University of Wurzburg)We consider a convex optimization problem on lin-early constrained cones in a Euclidean Jordan algebra.The cost function consists of a quadratic cost termplus a penalty function. A damped Newton algorithmis proposed for minimization. Quadratic convergenceto the global minimum is shown using an explicitstep-size selection.
15:20-15:40 Non-symmetric Riccati Theory andLinear Quadratic Nash Games.,Dirk Kremer (RWTH Aachen),Radu Stefan (University Polytechnica Bucharest)The existence of a stabilizing solution to the non-symmetric algebraic Riccati equation is shown to beequivalent to the invertibility of a certain Toeplitz op-erator, whose symbol is the transfer matrix functionof an exponentially dichotomic system. We also showthat this theory has an important application to non-cooperative differential games.
15:40-16:00 Some New Results on LinearQuadratic Regulator Design for Lossless Sys-tems,Maria Gabriella Xibilia (University of Messina),Luigi Fortuna, Giovanni Muscato(University of Catania)In the paper new results concerning LQR regulatordesign for lossless systems are proved. In particularit is given a necessary and sufficient condition whichallows to obtain the optimal gains of an LQR problemfor a lossless system without solving the CARE equa-tion, when a particular quadratic index is considered.
Afternoon:
Room: 102, Session: MP1Chair: Sandro ZampieriTitle: The Interaction of Control, Informationand Communication
16:30-16:50 Minimum Data Rates for StabilisingLinear Systems with Unknown Parameters,Girish Nair, Robin J. Evans, Bjorn Wittenmark(University of Melbourne)A fundamental question in the field of joint commu-nication and control is the following: if a plant andcontroller communicate at a limited data rate and norestrictions but causality are placed on the codingand control policy, what is the smallest rate abovewhich stabilisation is possible? In this talk, the caseof discrete-time LTI systems with unknown parame-ters is discussed. Necessary and sufficient data ratebounds for stabilisability are presented.
16:50-17:10 A Graphical Model Approach toDistributed Control,Sekhar Tatikonda (UC-Berkeley)We develop a graphical model framework for visualiz-ing structural properties of distributed systems. Weshow that this graphical model can be used to deter-mine which agents influence other agents. Further-more it can be used to determine which elements inan agent’s information pattern are relevant to its de-cision. These structural observations suggest approx-imation techniques.
17:10-17:30 Quantized Stabilization of Single-input Nonlinear Affine Systems,Jialing Liu, Nicola Elia(Iowa State University)In this paper we show that, for a single-input nonlin-ear affine continuous-time system, a (robustly) stabi-lizing quantizer can be constructed based on a (ro-bust) control Lyapunov function. We characterize

MTNS – 2002 44
the coarsest quantizer under certain conditions. Thequantized control scheme provides understanding tothe problem of how much interaction between the con-troller and the system dynamics is needed for stabi-lization.
17:30-17:50 Distributed Robust Controller forComplex Networks,Wing Shing Wong (Chinese University of Hong Kong)Recently, control problems defined over a distributed,complex networking environment have received muchattention. Examples of these problems include conges-tion control over the Internet and the power controlproblem of a wireless communication system. Con-trollers for these systems should possess certain char-acteristics. For example, they should depend only on asmall amount of observation data in order to minimizecommunication overhead. They have to relatively in-sensitive to the system parameters and maybe even tothe system structure, since there are great uncertain-ties about the system model. Moreover, the decisionrules are distributed to a large number of independentplayers, who may or may not be cooperating. In thistalk, we report on some robust convergence results ofa common class of distributed, low data rate feedbackcontrollers.
17:50-18:10 Stabilizing Quantized Feedback withMinimal Information Flow: the Scalar Case,Fabio Fagnani (Politecnico di Torino),Sandro Zampieri (Universita di Padova)In the performance analysis of a quantized stabiliza-tion strategy, two parameters play a central role: thenumber of quantization levels used by the feedbackand the convergence time of the closed loop system.In this paper we propose a definition of optimality fora quantized stabilization strategy based on how theseparameters grow with the contraction, which is the ra-tio between the measure of the starting region and thetarget region of the state space. Then, we analyze theperformance and prove the optimality of three differ-ent stabilizing quantized feedbacks strategy for scalarlinear systems. A state feedback with finitely manyquantization levels yields only the so called practicalstabilization, namely the convergence of any initialstate belonging to a bigger bounded region into an-other smaller target region of the state space. Theratio between the measure of the starting region andthe target region is called contraction of the closedloop system.
18:10-18:30 Systems of Dynamics and their Co-homological Invariants,Reuben Rabi, Sanjoy Mitter(MIT),This talk introduces the idea that an open nonlin-ear dynamical system of the affine kind can, whencomposed of an interacting assembly of subsystems,be viewed “as a space” and demonstrates that thisidea has clear and concrete implications for our un-derstanding of the structure of such systems, whichhas traditionally been a difficult area resisting mean-ingful progress. We produce invariants of an assemblyof interconnected systems which reflect the manner inwhich the (sub-)systems are interconnected. Our in-variants are cohomology groups which are sensitive todynamics around closed loops of the underlying graphof the system of dynamics.
Room: 126, Session: MP2
Chair: Matthias KawskiTitle: Nonlinear Systems and Control 2
16:30-16:50 Skorokhod-Neumann BoundaryConditions in Robust Queueing Service Mod-els,Martin Day (Virginia Tech)We introduce the idea of boundary extremals in con-trol problems for simple fluid models of queueing sys-tems with Skorokohd dynamics, using an L2-gain ro-bust control formulation. Connections with viscosity-sense Neumann boundary conditions are mentioned.A simple example is presented in which these ex-tremals play a fundamental role in the constructionof the optimal strategy.
16:50-17:10 Optimization Methods for TargetProblems of Control,Alexander B. Kurzhanski, Pravin Varaiya(University of California at Berkeley)The present paper indicates an array of reachabil-ity problems relevant for nonstandard target prob-lems of control. The problems are solved through dy-namic programming techniques for systems with non-integral costs. This leads to new types of general-ized Hamilton-Jacobi-Bellman type equations in thegeneral case and in the linear case allows treatmentthrough duality methods of convex analysis and min-max theory.
MTNS – 2002 45
17:10-17:30 On Optimal Quadratic LyapunovFunctions for Polynomial Systems,Graziano Chesi (University of Siena),Alberto Tesi (University of Florence),Antonio Vicino (University of Siena)The problem of estimating the domain of attraction ofequilibria of polynomial systems is considered. Specif-ically, the computation of the quadratic Lyapunovfunction which maximizes the volume of the estimateis addressed. In order to solve this double non-convexoptimization problem, a semi-convex approach basedon LMIs is proposed. Moreover, for the case of oddpolynomial systems, a relaxed criterion for obtainingan effective starting candidate is presented.
17:30-17:50 The Maximum Principle for an Op-timal Solution to a Differential Inclusion withState Constraints,Aurelian Cernea (University of Bucharest)We consider an optimal control problem given bya differential inclusion, whose trajectories are con-strained to the closure of an open set. Using recentresults on existence and relaxation of solutions of theconstrained differential inclusion necessary optimalityconditions are obtained in the form of a maximumprinciple.
17:50-18:10 Synergetic Synthesis of NonlinearInterconnected Control for Turbogenerators,Anatoly Kolesnikov, Andrew Kuzmenko(Taganrog State University, Russia)The analytical synthesis problem of coordinating reg-ulator for power system, consisting of two turbogener-ators, working at big power network, is considered inthis article. We used nonlinear, non-conservative andinterconnected model of such power system. Thereare four control channels in this case. To solve thishard task we used main approach of synergetic con-trol theory. This approach was developed by pro-fessor A.A. Kolesnikov. Briefly synthesis procedureis described. The synthesized regulator provides sta-bilization of the generators excitation currents (syn-chronous EMFs), coordinated turbines rotation fre-quency, asymptotic stability of the closed-loop sys-tem in the whole and compensates the external low-frequency harmonic disturbances that act to genera-tors. Example of synthesis is considered.
18:10-18:30 Stabilities and Controllabilities ofSwitched Systems (with Applications to theQuantum Systems),Leonid Gurvits (Los Alamos National Laboratory)We study various stabilities and controllabilities of lin-
ear switched systems, including those appearing in thequantum computations context . A number of new re-sults and connections is presented, most of them withproofs .
Room: 129, Session: MP3
Chair: Amarjit BudhirajaTitle: Stochastic Control and its Applications
16:30-17:00 Nonlinear Filtering in CorrelatedNoise: a Wiener Chaos Approach,Sergey Lototsky (USC)The solution to the Zakai filterling equation for thetime homogeneous diffusion filtering problem withcorrelated noise is approximated using the Galerkinapproximation followed by the Wiener Chaos decom-position. The approximation error is estimated and acorresponding numerical algorithm is described. Thealgorithm has a very simple real-time part and can beused with both continuous and discrete time observa-tions.
17:00-17:30 Stationary Solutions and ForwardEquations for Controlled and Singular Martin-gale Problems,Richard H. Stockbridge(University of Wisconsin Milwaukee)Stationary distributions of Markov processes can typ-ically be characterized as probability measures µ thatannihilate the generator A of the process; that is, foreach such µ, there exists a stationary solution of themartingale problem for A with marginal distributionµ. This result is extended to martingale problems thatinclude absolutely continuous and singular ( with re-spect to time) components and controls. Analogousresults for the forward equation follow as a corollary.
17:30-18:00 An Investment Model with Liquid-ity Risk,Hui WangWe develop a continuous-time investment model toincorporate the presence of Liquidity risk. It is math-ematically equivalent to an optimal stopping problemwith multiple entries and forced exits. We obtain theclosed-form solution, under the assumptions of geo-metric Brownian motion output price and Poisson liq-uidity shocks. It is shown that the liquidity risk is atrue sense risk if and only if the entry cost is largeenough compared to the running cost.

MTNS – 2002 46
18:00-18:30 Mean-Variance Portfolio Selectionunder Markov Regime: Discrete-time Modelsand Continuos-time Limits,George Yin (Wayne State University),X. Y. Zhou (Chinese University of Hong Kong)In this paper, we propose a discrete-time model formean-variance portfolio selection. One of the distinctfeatures is that the system under consideration is aMarkov modulated system. We show that under suit-able conditions and scaling, the process of interestgoes to a switching diffusion limit. Related issues onoptimal strategies and efficient frontier will also bementioned.
Room: 136, Session: MP4Chair: Harry Dym, Heinz LangerTitle: Spaces with Indefinite Metrics and In-verse
16 :30-17:00 Regular and Singular Point-likePerturbations of some Differential Operatorsin Pontryagin Spaces,Aad Dijksma (University of Groningen)Yuri Shondin (Nizhny Novgorod)The minimal realization of the Bessel differential ex-pression
− d2
dx2+α2 − 1/4
x2, 0 6= α ∈ (−1, 1),
in the Hilbert space L2((0,∞); dx) is symmetric andhas defect numbers (1, 1). The Q-function for thissymmetric operator and one of its canonical selfad-joint extensions is
Q(z) = − π(−z)α
2 sin (πα).
The minimal realization of the Laguerre expression
−x d2
dx2− (1 + α− x)
d
dx), 0 6= α ∈ (−1, 1),
in the Hilbert space L2((0,∞);xαe−xdx) is symmet-ric and has defect numbers (1, 1). The Q-function forthis symmetric operator and one of its canonical self-adjoint extensions is
Q(z) = − π
sin (πα)Γ(−z)
Γ(−z − α).
Both functions are classical Nevanlinna functions for0 6= α ∈ (−1, 1), but for all other real noninteger val-ues of α they are generalized Nevanlinna functions,and hence are Q-functions for some symmetric oper-ator in a Pontryagin space with defect numbers (1, 1)and one of its canonical selfadjoint extensions. The
problem is to describe these. That is the topic ofthe lecture. The lecture is based on joint paperswith Heinz Langer (University of Technology, Vienna)and Yuri Shondin (Pedagogical Institute, Nizhny Nov-gorod).
17:00-17:30 Applications of Spaces with Indefi-nite Metrics,Babak Hassibi (California Institute of Technology)No Abstract
17:30-18:00 Sturm-Liouville Inverse SpectralProblems with Boundary Conditions Depend-ing on the Spectral Parameter,Cornelis van der Mee, Vjacheslav Pivovarchik(University of Cagliari, Italy)The potential in a Schro”dinger equation on a finiteinterval with energy dependent boundary conditionsis derived from its eigenvalues using the theory ofHermite-Biehler class entire functions.
18:00-18:30 Variational Principles for Block Op-erator Matrices,Christiane Tretter (Universitaet Bremen),Heinz Langer, Matthias Langer(University of Technology, Vienna)In this talk variational principles for block operatormatrices are presented which are based on function-als associated with the quadratic numerical range andwhich allow to characterize, e.g., eigenvalues in gapsof the essential spectrum.
Room: 209, Session: MP5
Chair: Paul FuhrmannTitle: Algebraic Systems Theory
16:30-16:50 Further Results on Interconnectionand Elimination for Delay-Differential Sys-tems,Heide Gluesing-Luerssen(University of Oldenburg, Germany)We will consider a problem concerning the intercon-nection of systems from the behavioral point of view.The systems under consideration are linear, smooth,time-invariant, and have commensurate delays. Wewill give a characterization for the achievability ofa given subsystem via regular interconnection fromthe overall system. This also leads to a criterion forachievability via regular interconnection followed byan elimination of the (then) latent variables.

MTNS – 2002 47
16:50-17:10 Reduction of Affine Systems onPolytopes,Jan H. van Schuppen, Luc C.G.J.M. Habets(Eindhoven University of Technology)In an affine system on a polytope, state trajectoriesare terminated when they reach a facet of the poly-tope and attempt to exit. The realization problem forthese systems is based on their behaviors, i.e. the setof input-output trajectories on time-intervals of eitherfinite or infinite length. The state set can be reducedif and only if a subspace of the classical unobservablesubspace, characterized by the normal vectors of theexit facets, is nontrivial.
17:10-17:30 State Feedback Stabilization withGuaranteed Transient Bounds,Fabian Wirth, Diederich Hinrichsen, Elmar Plischke(Universitaet Bremen)We analyze under which conditions linear time-invariant state space systems can be stabilized bystatic linear state feedback such that prescribed tran-sient bounds hold pointwise in time. Necessary andsufficient conditions for stabilizability in this sense arederived for the quadratic stability definitions. Whilethe general case is open, we obtain necessary and suf-ficient criteria for generating a strict contraction semi-group w.r.t. the spectral norm.
17:30-17:50 Reduction of the Number of Param-eters for all Stabilizing Controllers,Kazuyoshi Mori (The University of Aizu)This paper presents a parameterization method of sta-bilizing controllers that needs smaller number of pa-rameters than previous. The result in this paper willnot assume the existence of the coprime factorizabilityand not employ the Youla parameterization.
17:50-18:10 Structural Properties of LTI Singu-lar Systems by Output Feedback,Runyi Yu (Eastern Mediterranean University),Dianhui Wang (La Trobe University, Australia)Generic results regarding the structural propertiesof LTI singular system are presented in this paper.These include the structure of the system poles (bothfinite and infinite), assignment of the finite poles,elimination of the impulse mode, and controllabilityand observability of the closed-loop system. Theseproperties are characterized by some new concepts de-fined in this paper.
18:10-18:30 On Fliess Models over a Commuta-tive Ring,Vakhtang Lomadze (University of Southampton)
Fliess models come as natural generalizations of clas-sical polynomial models. As known, they are definedin terms of finitely generated modules and provide anadequate description of arbitrary linear systems (notnecessarily observable or controllable). In this note weextend Fliess’ approach to linear systems defined overan arbitrary commutative ring. We believe that theexposition will be of interest even for the field case.
Room: 210, Session: MP6Chair: Daniel LiberzonTitle: Hybrid Systems and Control
16:30-17:00 Nonlinear and Hybrid Control viaRRTs,Michael Branicky, Michael M. Curtiss(Case Western Reserve University)In this paper, we review rapidly-exploring randomtrees (RRTs) for motion planning, experiment withthem on standard control problems, and extend themto the case of hybrid systems.
17:00-17:30 Reachability Analysis of Hybrid Sys-tems with Linear Dynamics,Mireille Broucke (University of Toronto)We present results on the symbolic reachability anal-ysis for hybrid systems with linear autonomous dy-namics in each location.
17:30-18:00 Towards the Control of Linear Sys-tems with Minimum Bit-Rate,Joao Hespanha, Antonio Ortega, Lavanya Vasudevan(UC Santa Barbara)We address the problem of determining the min-imum bit-rate needed to stabilize a linear time-invariant process. For the noise free case, we de-termine a bit-rate below which stabilization is notpossible and above which asymptotic stabilizationcan be achieved. Inspired by differential pulse codemodulation techniques, we propose practical encod-ing/decoding schemes that guarantee boundedness ofthe state for the case of a noisy linear time-invariantprocess.
18:00-18:30 Control of Hybrid Systems alongLimit Cycles,Milos Zefran, Guobiao Song, Francesco Bullo(University of Illinois)In this work we use semidefinite programming and theframework of piecewise linear systems to design con-trollers that stabilize a hybrid system to a limit cycle.Dynamics of a hybrid system along a periodic orbitis not continuous so the usual arguments that rely

MTNS – 2002 48
on the smoothness of the system do not hold. Thisproblem is motivated primarily by robotic walking de-vices, but it is relevant also for flight control systemsand electrical power networks.
Tuesday August 13, 2002
8:00-9:00 Room : 101 Plenary Talk
Gilbert Strang (MIT),Filtering and Signal ProcessingWe discuss two filters that are frequently used tosmooth data. One is the (nonlinear) median filter,that chooses the median of the sample values in thesliding window. This deals effectively with ”outliers”that are beyond the correct sample range, and willnever be chosen as the median. A straightforward im-plementation of the filter is expensive, particularly intwo dimensions (for images). The second filter is lin-ear, and known as ”Savitzky-Golay”. It is frequentlyused in spectroscopy, to locate positions and peaksand widths of spectral lines. This filter is based on aleast-squares fit of the samples in the sliding windowto a polynomial of relatively low degree. The filter co-efficients are unlike the equiripple filter that is optimalin the maximum norm, and the ”maxflat” filters thatare central in wavelet constructions. We will discussthe analysis and the implementation of both filters.
9:00-10:00 Room : 101 Invited Talk
Arjan van der Schaft (University of Twente),Mathematical Theory of Network Models ofPhysical SystemsPrevailing trend in the modeling and simulationof complex (lumped-parameter) physical systems ismodular modeling, where the complex physical sys-tem is represented as the network interconnection ofideal elements. This has many advantages in termsof flexibility, re-usability of model parts, and sup-port for automated modeling. The viewpoint of net-work modeling necessarily leads to the considerationof open dynamical systems, that is, dynamical systemswith external variables, which can be interconnectedto other open systems. This viewpoint is fundamen-tal to systems and control theory, where the analysisof complex systems is based on the properties of thesub-systems and the way they are interconnected toeach other, and the behavior of the complex systemis sought to be influenced and regulated by the ad-dition of additional feedback loops and control com-ponents. On the other hand, the equations of motionobtained from direct network modeling are often com-
plicated and without apparent structure, and easilycontain algebraic constraints arising from the inter-connection of the sub-systems. As such, they maynot be well-suited for analysis,simulation and control.The aim of this presentation is to show how a particu-lar type of network modeling, namely port-based mod-eling, where the sub-systems are interacting with eachother through power exchange represented by pairs ofconjugated variables, immediately leads to generalizedHamiltonian equations of motion. In fact, the inter-connection structure of the complex system, togetherwith power-preserving elements like transformers andworkless constraints, defines a geometric object; calleda Dirac structure. The equations of motion are Hamil-tonian with respect to this Dirac structure and theHamiltonian defined by the total energy of the sys-tem, together with the energy-dissipation structure.The resulting class of geometrically defined systemsare called port-Hamiltonian systems. This frameworkoffers many possibilities for analysis, simulation andcontrol, which we will briefly address. In particular,we will indicate how a given port-Hamiltonian plantsystem can be controlled by interconnecting it witha controller port-Hamiltonian system, and how thisextends classical passivity theory. Finally, we showhow the framework can be extended to boundary con-trolled distributed-parameter systems, by consideringinfinite-dimensional Dirac structures based on Stokes’theorem.
9:00-10:00 Room : 102 Invited Talk
Robert J. McEliece (Cal Tech),Belief Propagation on Partially Ordered SetsThe field of error-correcting codes has been revolu-tionized by the advent of suboptimal iterative de-coding methods, for example turbo-decoding and it-erative decoding of low-density parity-check (LDPC)codes. Several years ago it was recognized that allscuh decoding algorithms are special cases of Pearl’s”belief propagation” algorithm applied to graphs withcycles, although BP isn’t supposed to work when cy-cles are present! In this talk I will review the state ofour understanding of loopy BP, and will, motivated bythe recent work of Yedidia, Freeman, and Weiss, in-troduce a promising generalization of BP in which themessages are passed not along the edges of a graph,but rather along the edges of the Hasse diagram of afinite partially ordered set.

MTNS – 2002 49
9:00-10:00 Room : 129 Invited Talk
Jeff Wood (University of Southampton),Modules and Behaviors: Re-examiningOberst’s DualityThe module associated to a system, and the dualitybetween system modules and system behaviors, willbe introduced from a natural point of view. We willexamine how injectivity of the signal space is relatedto the elimination problem, and the cogenerator prop-erty to identifiability. We will also introduce ‘abstractbehaviours’, which are independent of any embeddingin a trajectory space. However, most of the talk willbe of a tutorial nature and will be illustrated by thecase of systems defined by linear ordinary/ partialconstant coefficient differential equations.
Morning:
Room: 102, Session: TUA1Chair: Heide Gluesing-LuerssenTitle: Design and Analysis of Block Codes,Part I
10:30-11:30 Iterative Decoding and Design ofCodes on Graphs,Pascal O. Vontobel (ETH)The concept of factor graphs and the sum-product al-gorithm is one possible way to understand the differ-ence between codes suitable for iterative decoding and”traditionally good” codes. After stating some desir-able properties of factor graphs, we will review differ-ent approaches given in the literature leading to ran-dom and algebraic constructions of turbo, low-densityparity-check, and other codes.
11:30-12:00 Codes for Networks,Ralf Koetter (University of Illinois)We investigate connections between coding for net-works s suggested by Ahlswede et al. and linear sys-tem theory. In particular we focus on structure the-orems for linear systems on arbitrary graphs. Sucha linear system may be described by a trellis on theunderlying graph. Employing various duality resultsfrom the theory of trellises and generalized state re-alizations, we give an algorithm that for a given net-working problem achieves a locally optimal solution.
12:00-12:30 Unitary Constellation Design withApplication to Space-time Coding,Guangyue Han, Joachim Rosenthal(University of Notre Dame)Unitary modulation scheme in Rayleigh flat fadingchannel with multiple antennas requires us to designcertain space-time codes to increase the channel ca-
pacity and lower the bit error probability at the sametime. In this paper, we design some specific constella-tions according to two design criteria and their trans-formations. Some of our codes feature good perfor-mance and efficient decoding algorithms.
Room: 126, Session: TUA2Chair: Wijesuriya P. DayawansaTitle: Patterns in Biology
10:30-11:00 Visual Systems,Bijoy Gosh, A. Polpitiya(Washington University St.Louis)No Abstract
11:00-11:30 The Dynamics of Avian Kinesis,Lawrence Schovanec, Alan Barhorst, Sankar Chatter-jee(Texas Tech University)Unlike most vertebrates, birds can raise the upper jawwith respect to the brain case, a feature known ascranial kinesis. This property makes it possible forbirds to create a wide gape and fast movement ofthe bills. This paper provides a method for assess-ing how neural controls and physiological variationsaffect the gape, speed of movement, and the magni-tude of forces generated by the jaw. This is achievedby incorporating joint torques derived from muscul-tendon dynamics into the equations of motion for thesystem modeled as a system of articulating segmentallinks, closed loops and distributed elastic components.The method accounts for both the rigid body motionsand the elastic deformations of the articulating com-ponents. This is accomplished by using a nonholo-nomic hybrid parameter projection method in whichthe dynamics are projected onto the constraint-freemanifold of the generalized speed space and thus re-quire no algebraic constraint conditions. Numericalsimulations and analysis of the system provide insightinto how the biomechanical are related to functionalissues of the avian skull as well as evolution of thesystem.
11:30-12:00 Spiral Waves in the Heart,Clyde Martin, P. Marcus(Texas Tech University)A major problem that is being considered by severalgroups around the world is to model the electrical andmuscular actions of the mammalian heart. These ef-forts vary greatly in complexity. At the most com-plicated level the model is developed at the cellularlevel and the detailed physiology is taken into account.These models are very difficult to simulate, often re-quiring hours or days of super computer time for a

MTNS – 2002 50
few milliseconds to seconds of heart time. Howeverthe result is very accurate simulation. At the simplestlevel the heart is modeled as a single partial differen-tial equation. These models are easy to simulate andseveral minutes of heart action can be realized in atmost a few minutes of computer time. However, itis very difficult to relate the results to physiologicalassumptions. We have worked extensively with thesemodels and are able to develop some understanding ofthe relation of the models to the cardiac fibrillation.We are now in the process of developing models thatare intermediate to these two classes of models.
12:00-12:30 Large Amplitude Travelling Wavesin Coupled Oscillater Networks,Wijesura P. Dayawansa, Clyde Martin(Texas Tech University)Theory of small amplitude oscillations in coupled os-cillator networks is well established. However, whenthe value of bifurcation parameters become large, theanalysis of such networks become rather complex. Anetwork consisting of cubic oscillatos is consideredhere, and it is shown that it is possible to increase bi-furcation parameters so as to maintain the simplicityof resulting oscillation patterns, leading to a mecha-nism to generate complex spiking trains.
Room: 129, Session: TUA3Chair: Victor Vinnikov, Joseph A. BallTitle: Minicourse A: Multidimensional Systems
10:30-12:30 Overdetermined MultidimensionalSystems and Applications,Victor Vinnikov (Ben Gurion University of theNegev)Joseph A. Ball(Virginia Tech)We consider 2D ISO linear systems where the evolu-tion of the whole state is specified in two indepen-dent directions. The requirement that the value ofthe state at a given point be independent of the pathfrom the origin chosen to arrive at the given pointleads to nontrivial consistency conditons: the tran-sienct evolutions should commute and the input (andoutput) signal should satisfy a nontrivial compatibil-ity PDE/DE. Many of the standard structural prop-erties and operations for traditional linear systems(controllbility, observability, minimality, pairing withthe adjoint system, feedback coupling, equivalence be-tween conservative systems and Lax-Phillips scatter-ing theory) carry over for this setting. There is alsoa frequency-domain theory for this class of systems(the transfer function is a bundle map between flatvector bundles on a Riemann surface, or equivalnetly
between kernel bundles for determinantal representa-tions of an algebraic curve), and there is a Laplacetransform (continuous time) or Z-transform (discretetime) along the discriminant curve which implementsthe transformation from time domian to frequency do-main. In addition to analogues of the usual problemsfrom system theory, we mention two applications be-yond the usual scope of system theory: wave-particleduality in quantum mechanics, and a mathematicalmodel for DNA chains.
Room: 136, Session: TUA4
Chair: Lars Gruene, Fabian WirthTitle: Input-to-State Stability, Part I
10:30-11:00 Attractors, Input-to-State-Stability,and Control Sets,Fritz Colonius (University of Augsburg),W. Kliemann (Iowa State University)The relations between attractors, ISS and controllabil-ity properties are discussed. In particular, it is shown,that loss of the attractor property under perturbationsis connected with a qualitative change in the controlla-bility properties due to a merger with a variant controlset.
11:00-11:30 Output-Input Stability of NonlinearSystems and Input/Output Operators,Daniel Liberzon (University of Illinois)The recently proposed definition of output-input sta-bility requires the state and the input of the systemto be bounded in terms of the output and derivativesof the output. The present work extends this con-cept to the setting of input/output operators. Weshow that output-input stability of a system impliesoutput-input stability of the associated input/outputoperator, and that under suitable reachability and ob-servability assumptions, a converse result holds.
11:30-12:00 A Parameter-Robust Observer as anApplication of ISS Techniques,Madalena Chaves (Rutgers University)Systems that model chemical networks are often de-fined through a set of parameters (the reaction rateconstants) whose values may be determined with asmall margin of error. These parameters will typi-cally also appear in the construction of observers. Adefinition of parameter-robustness is proposed and anexplicit observer for zero-deficiency chemical networksis presented, which is robust in this sense.

MTNS – 2002 51
12:00-12:30 Quantitative Aspects of the Input-to-state Stability property,Lars Gruene (J.W. Goethe-Universitaet Frankfurt)In this talk we consider quantitative aspects of theinput-to-state stability (ISS) property. Our consider-ations lead to a new variant of ISS, called input-to-state dynamical stability (ISDS). The main feature ofISDS is that it admits a quantitative Lyapunov func-tion characterization. We clarify the relation to theoriginal ISS formulation and present several applica-tions.
Room: 208, Session: TUA5Chair: Anders RantzerTitle: Linear Systems
10:30-10:50 A New Property of Laguerre Func-tions,Luigi Fortuna, Riccardo Caponetto, Mattia Frasca(University of Catania, Italy)Laguerre filters constitute an orthonormal basis forthe Hilbert space, for this they are used in systemidentification and reduced-order modelling. In thispaper a new property of Laguerre filters is introduced:it is shown that the system having as transfer functionthe sum of the first n+1 functions has all the singularvalues equals each other. On the basis of this propertya generalization of Laguerre filters is proposed.
10:50-11:10 Communication-Limited Stabilis-ability of Jump Markov Linear Systems,Girish Nair, Subhrakanti Dey, Robin Evans(University of Melbourne)This paper investigates the control of fully observed,scalar jump Markov linear systems in which feedbackis transmitted at finite data rates over noiseless digi-tal channels. In particular, the objective is to find theinfimum data rate, over all causal coding and controllaws, at which asymptotic closed-loop stability in m-th absolute output moment is achievable.
11:10-11:30 Equivalence of Finite PoleAssignability of LTI Singular Systems by Out-put Feedback,Runyi Yu (Eastern Mediterranean University),Dianhui Wang (La Trobe University, Australia)This paper shows that the assignability of finite polesof a strongly controllable and observable singular sys-tem (E,A,B,C) is equivalent to the pole assignabil-ity of a non-singular system (As,Bs,Cs) of orderrank(E). Consequently, all the existing results onpole assignment of non-singular systems can be ex-tended to singular systems as far as the finite polesare concerned.
11:30-11:50 On Kalman Models over a Commu-tative Ring,Vakhtang Lomadze (University of Southampton)There is a good notion of rational functions with coef-ficients in a commutative ring. Using this notion, weeasily obtain a neat generalization of Chapter 10 ofthe classical book by Kalman et al. to linear systemsover an arbitrary commutative ring. The generaliza-tions certainly exist already. However, we believe thatthe approach we present is more natural and straight-forward.
11:50-12:10 On Rosenbrock Models over a Com-mutative Ring,Vakhtang Lomadze (University of Southampton)Rosenbrock’s notion of system equivalence is generalin nature; it is a kind of equivalence which in algebrais often termed as stable. We have shown recentlythat Fuhrmann’s notion of system equivalence can beviewed as a homotopy equivalence, and as such is alsogeneral in nature. This note deals with a generaliza-tion of the theory of system equivalences from the fieldcase to the commutative ring case.
12:10-12:30 Inclusion of Frequency Domain Be-haviors,Stephen Prajna (Cal Tech),Pablo A. Parrilo (ETH)This paper addresses inclusion of behaviors and itsverification. It is shown that verifying inclusion of fre-quency domain behaviors defined by polynomial fre-quency domain equalities and inequalities amounts toproving emptiness of some basic semialgebraic sets. Asemidefinite programming relaxation method for solv-ing this problem is outlined. Some applications aregiven to illustrate the use of the concepts.
Room: 209, Session: TUA6
Chair: Viswanath RamakrishnaTitle: Quantum Engineering I
10:30-11:10 A Numerical Approach to the De-sign of Strongly Modulating Pulses to Imple-ment Precise Effective Hamiltonians for Quan-tum Information Processing,Timothy Havel, Nicolas Boulant, David G. Cory,Evan M. Fortunato, Marco A. Pravia, Grum Tekle-mariam(MIT)Unitary ”logic gates” to are used to process quantuminformation: the state of a 2-D quantum system, or”qubit”. In many approaches to QIP, the gates are

MTNS – 2002 52
implemented by modulating the system’s internal dy-namics with piecewise constant external control fields,or ”pulses”. This talk describes a numerical approachto designing pulse sequences which yield unitary gateswith high precision. The results of NMR experimentsdemonstrating these pulses will also be presented.
11:10-11:50 System Theoretic Aspects of NMRSpectroscopy,Raimund J. Ober (University of Texas at Dallas)No Abstract
11:50-12:10 Local and Global Control of Popula-tion Transfer in Quantum Systems,Vladimir S. Malinovsky (University of Michigan),Stimulated Raman Adiabatic Passage (STIRAP) hasproven to be an efficient and robust technique of pop-ulation transfer in three-level and multilevel systems.On the other hand, the studies of optimal pulse shap-ing to control atomic or molecular dynamics havereached a high degree of sophistication, specially sincethe advent of the use of Optimal Control Theory(OCT). In this contribution we show the connectionbetween the counterintuitive pulse sequence in STI-RAP and the population locking condition of inter-mediate levels. The relationship between several ver-sions of OCT called local optimization methods andSTIRAP is also discussed.
12:10-12:30 Hartree-Fock Models in ElectronicStructure Computations,Gabriel Turinici(INRIA Rocquencourt/ CERMICS-ENPC, France)This talk will present, in a pedagogical manner, analgorithmic overview of the resolution of the Hartree-Fock problem. Although initially set as a minimi-sation problem, most traditional implementation usethe Euler-Lagrange critical point equations that giverise to a nonlinear eigenvalue problem. It will be seennext that the modern approaches try to come back tothe minimisation framework in a search for efficiency.
Room: 210, Session: TUA7
Chair: Stephen Campbell, Ramine NikoukhahTitle: Robust Estimation, Identification, andDetection
10:30-11:00 A Survey of Input-Output Methodsin Robust Estimation,Babak Hassibi (Cal Tech)No Abstract
11:00-11:30 Robust Least-Squares Filtering witha Relative Entropy Constraint,Bernard Levy (University of California at Davis),Ramine Nikoukhah (INRIA)We consider a robust Wiener filtering problem forwide-sense stationary processes in the presence ofmodelling errors. It requires solving a minimax prob-lem consisting of finding the best filter for the least-favorable statistical model within a neighborhood ofthe nominal model, which is specified by the relativeentropy with respect to the nominal model. The stan-dard noncausal Wiener filter is optimal, and in thecausal case a characterization is provided for the bestfilter and corresponding least-favorable model.
11:30-12:00 Bounding the Solution Set of Uncer-tain Linear Equations: a Convex RelaxationApproach,Giuseppe Calafiore (Politecnico di Torino),Laurent El Ghaoui (UC Berkely)In this paper, we discuss semidefinite relaxation tech-niques for computing minimal size ellipsoids thatbound the solution set of a system of uncertain linearequations (ULE). The proposed technique is based onthe combination of a quadratic embedding of the un-certainty, and the S-procedure. The resulting bound-ing condition is expressed as a Linear Matrix Inequal-ity (LMI) constraint on the ellipsoid parameters andthe additional scaling variables. This formulationleads to a convex optimization problem that can beefficiently solved by means of interior point barriermethods.
12:00-12:30 The Design of Auxiliary Signals forRobust Active Failure Detection in UncertainSystems,Stephen Campbell (North Carolina State University),Ramine Nikoukhah (INRIA)By modeling the normal and the failed behaviors ofa process by two or more linear uncertain systems,failure detectability in linear systems can be seen as alinear multi-model identification problem. This paperdescribes an active approach for multi-model identifi-cation using minimal auxiliary signals. Both additiveand model uncertainty are included in this approach.
MTNS – 2002 53
Middle:
Room: 102, Session: TUM1
Chair: Daniel CostelloTitle: Design and Analysis of Block Codes,Part II
14:00-14:30 On a Few Classes of Optimal andNear-optimal Polynomial Codes,Nuh Aydin (Ohio State University)We generalize a recent idea of constructing codes overa finite field Fq by evaluating certain collection ofpolynomials over Fq at elements of an extension field.We show that many codes with the best-known pa-rameters can be obtained with this construction. Inparticular, a new linear code, a [40, 23, 10]-code, overF5 is discovered. Moreover, several families of optimaland near-optimal codes are obtained by this method.We call a code near-optimal if its minimum distanceis within 1 unit of the known upper bound.
14:30-15:00 Building Low-Density Parity-CheckCodes with Affine Permutation Matrices,Michael O’Sullivan, Marcus Greferath, RoxanaSmarandache(San Diego State University)We will expand on a technique due to Hui et al for con-structing low density parity check codes using blocksof matrices, each constructed as a sum of permutationmatrices. The permutation matrices that we use aredefined by an affine congruence equation.
15:00-15:30 On Plotkin and Elias Bounds forCodes over Frobenius Rings under the Homo-geneous Weight,Marcus Greferath (San Diego State Univ.)Homogeneous weights were introduced by W. Heiseand I. Constantinescu in 1995. They appear as a nat-ural generalization of the Hamming weight on finitefields and the Lee weight on Z4 and have proven tobe important in further significant papers. This arti-cle developes a Plotkin and an Elias bound for codeson finite Frobenius rings that are equipped with thisweight. Surprisingly these bounds have the same formas in the case of the Hamming weight on a finite field.Their proof however requires different techniques thanthe classical proof: we make use of their representa-tion by generating characters on the finite Frobeniusring in question.
15:30-16:00 Four and Six-Dimensional SignalConstellations from Algebraic Lattices,Carmelo Interlando (University of Notre Dame),Michele Elia (Politecnico di Torino)We describe a procedure to construct signal constel-
lations from lattices associated to rings of algebraicintegers. The procedure provides a natural way tolabel the constellation points by elements of GF(q).The labeling is proven to be linear which allows, atthe receiver, a fast way to map constellation pointsinto field elements. The constellations performance isdetermined by their minimum Euclidean distance andaverage energy, for rates from 1 up to 3.
Room: 126, Session: TUM2Chair: Raimund OberTitle: Immunology 1: Introduction and Mi-croscopy
14:00-14:40 Introduction to Workshop andOverview,Raimund Ober (University of Texas at Dallas)A short introduction to minisymposium will be pre-sented by presented an overview of the topics that willbe considered in the mini-symposium.
14:40-15:20 T Cell Receptor MHC Interactions:An Overview,E. Sally Ward (University of Texas at Dallas)A tutorial exposition is given of the biology and inparticular immunology that is central for the under-standing of the topics that will be presented in themini-symposium by other speakers. This presenta-tion should be of particular interest to attendees ofthe conference who are not familiar with these topics.
15:20-16:00 Image Formation and Deconvolutionfor 3 Dimensional Microscopy of Cell Samples,Jose Angel Conchello (Washington UniversitySt.Louis)No Abstract
Room: 129, Session: TUM3Chair: Krzystof Galkowski, Eric Rogers, Victor Vin-nikovTitle: Multidimensional Systems 1
14:00-15:00 2D Linear Control Systems - FromTheory to Experiment to Theory,Eric Rogers, Tarek Al-Towlem,James Radcliffe, Paul Lewin(University of Southampton),Krzysztof Galkowski (University of Zielona Gora),David Owens (University of Southampton)The subject area of this paper is the application of sys-tems theory developed for linear repetitive processes,a distinct class of 2D linear systems, to linear itera-

MTNS – 2002 54
tive learning control schemes. A unique feature is theinclusion of experimental results obtained from theapplication of control laws designed using this theoryto an experimental rig in the form of a chain conveyorsystem.
15:00-15:30 Stability Analysis of 2D Dynamicsin Roessers Model,Tatsushi Ooba, Yasuyuki Funahashi(Nagoya Institute of Technology)State-space stability of linear shift-invariant discretetwo-dimensional (2-D) dynamics is considered. An ap-proach to the making of Lyapunov functions for 2-Ddynamics is presented. It produces a quadratic forminvolving finite cross-terms among local states. Theuse of the quadratic form expands the scope of thestability analysis based upon the notion of parallelstability expands.
15:30-16:00 Algebraic Algorithm for 2D Stabil-ity Test Based on a Lyapunov Equation,Minoru Yamada(Gifu National College of Technology),Li Xu (Akita Prefectural University),Osami Saito (Chiba University)Agathoklis proposed the 2D stability conditions basedon the Lyapunov approach. In this paper, some im-provements have been proposed for the algorithm ofAgathoklis so that 2D stability test can be realized bytotally algebraic operations.
Room: 208, Session: TUM4Chair: Joseph A. Ball, Hugo WoerdemanTitle: Recent Developments on Interpolationand Completion Problems
14:00-14:20 Feedback Control for Multidimen-sional Systems and Interpolation Problems forMultivariable Functions,Joseph A. Ball, Tanit Malakorn(Virginia Tech)We examine the connections between and the stateof art on feedback stabilization and H-infinity con-trol, model matching problems, and multivariableNevanlinna-Pick interpolation problems for the caseof multidimensional or nD linear systems.
14:20-14:40 On the Caratheodory-Fejer Interpo-lation Problem for Generalized Schur Func-tions,Vladimir Bolotnikov(The College of William and Mary)The solutions of the Caratheodory–Fejer interpola-
tion problem for generalized Schur functions can beparametrized via a linear fractional transformation
S(z) =A(z)E(z) +B(z)C(z)E(z) +B(z)
,
where A, B, C and D are polynomials depending ex-plicitly on the data of the problem and E is the param-eter varying over the class of classical Schur functions(i.e., analytic and contractive on the unit disk) suchthat CE +D does not vanish at interpolating points.All other parameters E are called excluded and thecorresponding functions S may have a pole (simple ormultiple) in one or more of the interpolation points ornot satisfy one or more interpolation conditions. Wepresent a classification of excluded parameters E andrelated functions S in terms of the Pick matrix of theinterpolation problem.
14:40-15:00 Abstract Interpolation in ScatteringSetting,Alexander Kheifets(The College of William and Mary)Abstract Interpolation scheme is adapted to the caseof nonanalytic (harmonic) interpolation. Unitary col-ligation yields a scattering system, orthogonality as-sumptions are given up (i.e. analyticity is not neces-sarily holds). Wandering subspaces are replaced byan arbitrary scale (i.e. incoming and outgoing sub-spaces are not distinguished). The modified versioncovers, in particular, Nehari and Commutant Liftingproblems directly.
15:00-15:20 A Convex Optimization Approach toGeneralized Moment Problems,Anders Lindquist (KTH),C. I. Byrnes (Washington University, St. Louis)We present a universal solution to the generalized mo-ment problem, with a nonclassical complexity con-straint, obtained by minimizing a strictly convex non-linear functional.This optimization problem is derivedin two different ways, first geometrically by path inte-gration of a one-form, and second via duality theoryof mathematical programming. The solution is thenapplied to interpolation problems and to estimationof probability distributions.““
15:20-15:40 Extremal Properties of Outer Fac-tors,Scott McCullough (University of Florida)Each of the coefficients of the outer and ∗-outer factorof a polynomial p(t) which is non-negative on for realt are larger, in absolute value, of the correspondingcoefficient of any other factor even for matrix-valuedfactors.

MTNS – 2002 55
15:40-16:00 On the Realization of Inverse Stielt-jes Functions,E. R. Tsekanovskii (Niagara University),Sergey Belyi (Troy State University),Seppo Hassi (University of Vaasa, Finland),Henk de Snoo (University of Groningen)A survey of recent results in realization theory ofHerglotz-Nevanlinna matrix-valued functions, inter-polation problems and explicit system solutions ob-tained by the author and D.Alpay, S.Belyi, S.Hassi,H.de Snoo is presented.We consider a new type of so-lutions of Nevanlinna-Pick interpolation problems, socalled, explicit system solutions and find conditions oninterpolation data of their existence, uniqueness andrestoration.
Room: 209, Session: TUM5Chair: Damir ArovTitle: Control of Distributed Parameter Sys-tems
14:00-14:30 Optimal Control and Riccati Equa-tions for a Degenerate Parabolic System,Jean-Marie Buchot (Onera-Toulouse),Jean-Pierre Raymond (Universite Paul Sabatier)In this paper, we consider a stabilization problem fora fluid flow. For a perturbation of the velocity of anincoming flow on a flat plate, the laminar-to-turbulenttransition location varies. We want to stabilize it bya suction velocity trough the plate. We look for asuction velocity in a feedback form, determined bysolving a LQR problem with an infinite time horizon.
14:30-15:00 Nonlinear Predictive Control ofFlexible Manipulator Systems,Alaa Mohamedy, Andrzej Ordys, Michael Grimble(University of Strathclyde)The paper discusses predictive control algorithms inthe context of applications to robotics and manufac-turing systems. Lagrangian mechanics and the as-sumed mode methods have been used to drive a pro-posed dynamic model of a single-link flexible manipu-lator having a revolute joint. The model may be usedin general to investigate the motion of the manip-ulator in the horizontal plane rest-to-rest rotationalmaneuver. Then, a nonlinear predictive controlleris designed on the basis of a Nonlinear QuadraticGaussian Predictive Optimal Control (NLQGPC) us-ing the receding-horizon control approach. Based onthe (NLQGPC), the control law is derived by min-imizing a quadratic cost function that penalizes fu-ture tracking errors and control torques. Simulationresults are presented for a single-link flexible manip-ulator to achieve a desired angular rotation of the
link while simultaneously suppressing structural vi-brations. The results are illustrated by a numericalexample.
15:00-15:30 Furtivity and Masking Problems inAcoustics,Francesco Zirilli (University “ La Sapienza” - Rome)We consider the time dependent acoustic scatteringphenomena associated to an incoming acoustic fieldthat hits a bounded simply connected obstacle withLipschitz boundary and known acoustic boundaryimpedance. In this context we study furtivity andmasking problems. These problems are formulated asoptimal control problems for the wave equation andsolved using the Pontryagin maximum principle viaan appropriate numerical method.
15:30-16:00 Approximation of Optimal Controlsfor Semi-Linear Parabolic PDE by SolvingHamilton-Jacobi-Bellman Equations,Sophie Gombao (University Paul Sabatier)This paper presents a numerical approximation of op-timal controls by discretization of a Hamilton-Jacobi-Bellman (HJB) equation, coming from a family of op-timal control problems of parabolic PDE. The methodis based on model reduction, using POD (Proper Or-thogonal Decomposition), and on the approximationof the HJB equation of the reduced problem by finitedifference scheme.
Room: 210, Session: TUM6Chair: Anders LindquistTitle: Filtering and Identification
14:00-14:20 System Identification of NonlinearDynamic Systems with Multiple Inputs andSingle Output Using Discrete-Time VolterraType Equations,Thomas Treichl, Stefan Hofmann, Dierk Schroder(TU Munchen)A theoretical framework about the identification ofnonlinear dynamic systems with multiple inputs andsingle output is presented. Basic considerations aboutdiscrete-time Volterra type equations are performed.It is shown how measuring equations can be obtainedfrom nonlinear and arbitrary coupled linear time-invariant transfer functions and nonlinear static func-tions. With a simulation example the presented iden-tification method is evaluated.
14:25-14:45 Data Driven Local Coordinates,Thomas Ribarits, Manfred Deistler, Bernard Hanzon(University of Technology Vienna)

MTNS – 2002 56
In this paper we study a rather novel parametrizationfor state-space systems: data driven local coordinates(DDLC) as introduced in (McKelvey and Helmersson,1999). We provide some insights into the geometryand topology of the DDLC construction and show anumber of results for this parametrization which arealso important for actual computations using DDLC.
14:50-15:10 Using Rank Order Filters to Decom-pose the Electromyogram,Dawnlee Roberson, Cheryl Schrader(University of Texas at San Antonio)This research applies nonlinear filters to model gen-erated muscle and nerve signals and compares the re-sults to determine correlation. The authors generatethree data test sets that range from simple (no noise)to fairly complex (noisy, varied amplitude) and applya Rank Order filter family to the rectified generatedelectromyographic signals in an attempt to recover theoriginal (nerve) signal. Promising results occur evenin the most challenging case.
15:15-15:35 Conditioning Analysis of a Continu-ous Time Subspace-Based Model IdentificationAlgorithm,Juan Carlos Martinez-Garcia(Instituto Mexicano del Petroleo), G.H. Salazar-Silva,R. Garrido(CINVESTAV-IPN)We present in this paper a study concerning the con-ditioning analysis of a continuous-time deterministicsubspace-based model identification algorithm. Weshow that the conditioning number of the associatedextended observability matrices depends on an expo-nential way from both: the estimated order of thesystem and the dimension of the system output vec-tor.
15:40-16:00 On Model and State Estimation un-der Mixed Uncertainty,Irina Digailova, Alexander B.Kurzhanski(Moscow State (Lomonosov) University)The paper deals with joint estimation of the statespace variables and the transition function of a sys-tem with original linear structure through availablemeasurements corrupted by uncertain disturbances.These are of the ”mixed’ type, combining unknownbut bounded, stochastic Gaussian and H-infinity typedisturbances. The results are given in either recur-rent pointwise form or through ”infomation sets” or”confidence domains”.
Afternoon:
Room: 102, Session: TUP1
Chair: Heide Gluesing-LuerssenTitle: Convolutional Codes
16:30-17:00 Construction and Decoding ofStrongly MDS Convolutional Codes,Roxana Smarandache (San Diego State University),Heide Gluesing-Luerssen (University of Oldenburg),Joachim Rosenthal (University of Notre Dame)A new class of of rate 1/2 convolutional codes calledstrongly MDS convolutional codes are introduced andstudied. These are codes having optimal column dis-tances. Properties of these codes are given and a con-crete construction is provided. This construction hasthe ability to correct δ errors in any sliding windowof length 4δ + 2 whereas the best known MDS blockcode with parameters [n, n/2], n = 4δ+ 2, can correctδ errors in any slotted window of length 4δ+ 2. A de-coding algorithm for these codes is given in the endof the paper.
17:00-17:30 On Observers and Behaviors,Paul A. Fuhrmann (Ben-Gurion University)In this talk, we explore the connection between theclassic, input output based theory of observers for lin-ear functions of the state and the theory of behaviorbased observers as developed in the paper Valcher andWillems [1999].
17:30-18:00 On the Convergence of Nonsystem-atic Turbo Codes,Daniel Costello Jr., Adrish Banerjee(University of Notre Dame),Francesca Vatta (Universita di Trieste),Bartolo Scanavino (Politecnico di Torino)In this paper, we study the convergence behavior ofnonsystematic feedback convolutional encoders usedas constituent encoders in a parallel concatenated(turbo) coding scheme. We use mutual informationbased EXIT charts to visualize the decoding trajec-tory of different nonsystematic encoders employingan iterative MAP decoding algorithm. It is observedthat encoders with low weight feedforward inversesperform better under low signal-to-noise ratio condi-tions. Catastrophic encoders, which have an infiniteweight feedforward inverse, can also be made to con-verge by doping the code with some systematic bits.We also present some BER performance curves fornonsystematic turbo codes and compare them to sys-tematic turbo codes.

MTNS – 2002 57
18:00-18:30 Some Small Cyclic ConvolutionalCodes,Heide Gluesing-Luerssen, Wiland Schmale, MelissaStriha(University of Oldenburg)In this note we will construct and investigate somesmall cyclic convolutional codes. Among other thingswe will present an infinite series of one-dimensionalCCCs over the field with 4 elements having length 3and increasing constraint length (complexity). Ourcomputations show that the first codes in this serieshave very good free distances.
Room: 126, Session: TUP2Chair: Raimund OberTitle: Immunology 2: Microscopy and Bio-physics
16:30-17:10 Microscopic Investigation ofSynapse Formation,Michael Dustin (NYU School of Medicine)No Abstract
17:10-17:50 Studying Protein-Protein Interac-tions: Biosensor Technology,Peter Schuck (National Institutes of Health)No Abstract
17:50-18:30 Protein Dynamics near MembraneSurfaces: New Aspects of Local Coupled Re-action and Transport,Nancy L. Thompson (University of North Carolina atChapel Hill)No Abstract
Room: 129, Session: TUP3Chair: Krzystof Galkowski, Eric Rogers, Victor Vin-nikovTitle: Multidimensional Systems 2
16:30-17:00 State Representation of nD Behav-iors,Isabel Bras, Paula Rocha(University of Aveiro, Portugal)In this paper we study the existence of state/driving-variable (SDV) representations for discrete nD kernelbehaviors. It turns out that, as in the 2D case, annD kernel behavior is SDV-representable if and onlyif it has an SDV-representable autonomous part. Ad-ditionally, we give a necessary condition for the staterepresentability of nD autonomous behaviors.
17:00-17:30 The Bang-Bang Principle for theGoursat-Darboux Problem,Dariusz Idczak (University of Lodz)In the paper, the bang-bang principle for a control sys-tem connected with a system of linear nonautonomouspartial differential equations of hyperbolic type (theso-called Goursat-Darboux problem or continuousFornasini-Marchesini problem) is proved. Some den-sity result for piecewise constant controls is also ob-tained.
17:30-18:00 Elimination of Anticipation of Sin-gular 2D Roesser Model,Tadeusz Kaczorek (Technical University Warsaw)Necessary and sufficient conditions for the anticipa-tion of singular 2D Roesser model are established.Three methods of elimination of the anticipation ofthe model are proposed. In the first method the elim-ination of the anticipation is achieved by connectionin series with the anticipatory model of a suitablenumber of delay elements. In the next two methodsthe elimination of anticipation is achieved by suitablechoice of feedback gain matrices. The methods areillustrated by numerical examples.
18:00-18:30 Difference Equations and n-D Dis-crete Systems,Jiri Gregor (Czech Technical University)Discrete systems are often described by differenceequations. With some attributes of initial state type,a difference equation defines a system, i.e. a set of(input,output) pairs. For systems defined by lineardifference equations (with constant or variable coeffi-cients) on arbitrary subsets of the n-dimensional gridsufficient conditions of their stability are formulated.These conditions also enable to obtain growth esti-mates for outputs of such systems. Examples illus-trate the results.
Room: 136, Session: TUP4Chair: Matthias KawskiTitle: Nonlinear Systems and Control 3
16:30-16:50 Disturbance Attenuation for a Classof Nonlinear Systems by Output Feedback,Wei Lin, Xianqing Huang(Case Western Reserve University),Chunjiang Qian (University of Texas at San Antonio)This paper studies the problem of disturbance atten-uation with internal stability via output feedback fora family of nonlinear systems. Using a feedback domi-nation design which substantially differs from the sep-aration principle, we explicitly construct a dynamic

MTNS – 2002 58
output compensator attenuating the disturbance’s ef-fect on the output to an arbitrary degree of accuracyin the L2 gain sense and achieving GAS in the absenceof disturbance.
16:50-17:10 A Linear Controller for a Multi-frequency Model of a Pulse-Width-ModulatedCuk Converter,Yusuf Fuad, J.W. van der Woude, W.L. de Koning(Delft University of Technology)This paper presents a linear controller for a mul-tifrequency model of a pulse-width-modulated Cukconverter. The controller is based on an equivalentdiscrete-time version of the linearized multifrequencymodel and uses the continuous-time output over oneswitching period. Using this combination we deter-mine the duty ratio at the beginning of every switch-ing period. We discuss how this controller, designedfor an arbitrary number of harmonics, can be ap-plied in a realistic situation. Simulations are givento demonstrate the influence of the controller on theresponse of the system.
17:10-17:30 Synergetic Synthesis of NonlinearKinematics Regulators for Mobile Robots,Boris Topchiev(Taganrog State University, Russia)We suggest new control strategy for mobile robots.This strategy based on forming some desired behaviorstructure. Desired structure is introducing to controllaws by using methods of synergetic theory of control.
17:30-17:50 On the Convergence of a FeedbackControl Strategy for Multilevel Quantum Sys-tems,Paolo Vettori (University di Padova)We present in this paper a class of feedback strate-gies that solve the steering problem for finite dimen-sional quantum systems. The control is designed tolet a suitable distance between the state and the tar-get decrease. Sufficient conditions are given to ensureconvergence of this process.
18:10-18:30 Global Output Feedback Controlwith Disturbance Attenuation for a Class ofNonlinear Systems,Xianqing Huang, Wei Lin(Case Western Reserve University)No Abstract
Room: 209, Session: TUP5Chair: Ruth CurtainTitle: Infinite Dimensional Systems
16:30-17:00 Observability Analysis of a Nonlin-ear Tubular Reactor,Cedric Delattre, Denis Dochain (CESAME UCL),Joseph Winkin (University of Namur (FUNDP))An observability analysis is performed on a linearPDE with a spatial-dependent coefficient, that isthe linearized model of a nonlinear tubular bioreac-tor. It is shown that the associated linear infinite-dimensional operator is a Riesz-spectral operator andthat a finite number of dominant modes of the sys-tem are observable when the substrate concentrationis measured at the reactor output. This result is con-firmed by a numerical simulation.
17:00-17:30 A Hilbert Space Approach to Self-Similar Systems,Mamadou Mboup(Universite Rene Descartes - Paris V)This paper investigates the structural properties oflinear self-similar systems, using an invariant subspaceapproach. The self-similar property is interpretedin terms of invariance of the corresponding transferfunction space to a given transformation in a Hilbertspace, in a same way as the time invariance prop-erty for linear systems is related to the shift-invarianceof the Hardy spaces. The transformation in questionis exactly that defining the de Branges homogeneousspaces. The explicit form of the corresponding im-pulse response, which is shown to be described by ahyperbolic partial differential equation, is given.
17:30-18:00 Boundary Observability in theQuasi-Static Thermoelastic Contact Problem,Michael Polis, Irina Sivergina(Oakland University)We study the observability properties of a system thatmodels the temperature evolution of a thermoelasticrod that may come into contact with a rigid obsta-cle. The system dynamics are described by a one-dimensional nonlocal PDE of parabolic type with anonlinear and nonlocal boundary condition. For aspecified observation operator, we show the system tobe observable and get the estimates for the boundarytemperature and the current state of the system.
18:00-18:30 Modeling Distributed ParameterSystems with Discrete Element Networks,Fabien Soulier, Patrick Lagonotte(LET - ENSMA)In this paper, we compare three general methodsaimed to obtain reduced-order models of simple dis-

MTNS – 2002 59
tributed parameter systems. We introduce the no-tion of infinite-order impedance and then we use theMittag-Leffler theorem or the continued fraction ex-pansion in order to represent models in the form ofelectrical networks. Eventually, the modeling of acooling fin is taken as an example.
Room: 210, Session: TUP6Chair: Avraham FeintuchTitle: Robust and H-Infinity Control and Esti-mation
16:30-16:50 Simultaneous Robust Regulationand Robust Stabilization with Degree Con-straint,Ryozo Nagamune (KTH)This paper characterizes all controllers to a problem ofsimultaneous robust regulation and robust stabiliza-tion. The controller set will be represented in termsof a solution set to the boundary Nevanlinna-Pick in-terpolation problem. It is shown that a certain degreerestriction on the solution set leads to a reasonabledegree bound of controllers. Using the freedom inthe controller set, other specification may be satisfiedwithout increasing the controller degree.
16:50-17:10 Closed-Loop Structure of Discrete-Time H-infinity Controller,Waree Kongprawechnon (Thammasat University),Shun Ushida, Hidenori Kimura (University of Tokyo)This paper is concerned with the investigation of theclosed-loop structure of an discrete-time H-infinitycontrol system. It is shown that discrete-time H-infinity controller is represented, like Linear QuadraticGaussian Control, as a pseudo state feedback, thatis, a state feedback interconnected with an observer.However, in the discrete-time H-infinity control prob-lem the control structure is more complicated sincewe cannot choose the state feedback and the observerindependently.
17:10-17:30 On a Recursive State-space Methodfor Discrete-time H2-Approximation,Ralf Peeters (University of Maastricht),Martine Olivi (INRIA Sophia-Antipolis),Bernard HanzonThe discrete-time H2-approximation problem forMIMO systems is reduced into an optimization prob-lem over stable all-pass systems, for which a recursivestate-space method is considered. A particular atlasof overlapping generic charts involving balanced real-izations is used. It is shown that the gradient of theH2-criterion at any local optimum of order n-1 em-bedded in the boundary of a chart of systems of order
n, is orthogonal to that boundary, pointing inwards.
17:30-17:50 PID Robust Control via Genetic Al-gorithms and Integral Criteria Minimization,Catalin Nicolae Calistru, Oana Geman(Technical University of Iasi, Romania)No Abstract
17:50-18:10 MIMO Systems Properties Preser-vation under SPR Substitutions,Juan Carlos Martinez-Garcia (Instituto Mexicano delPetroleo, G. Fernandez-Anaya(University Iberoamericana)This paper tackle the preservation of positive realproperties in Multi-Input Multi-Output transfer func-tions, when performing substitutions of the Laplacevariable s by strictly positive real functions of relativedegree equal to zero. We consider also the preserva-tion of stability properties of a class of unforced lineartime-invariant systems affected by a memoryless, pos-sibly time-varying nonlinear, input which depends onthe system output.
18:10-18:30 State Feedback Mixed H2/H-Infinity Problem for Linear Systems with Fi-nite Jumps,Vasile Dragan, Adrian Stoica(Romanian Academy)The paper consider the mixed H2/ H-infinity problemfor linear systems with jumps. There are two mainreults proved in the paper. The first one provides anevaluation of the norm induced by the inputs of ex-ponentially stable systems with jumps. The secondresult gives the solution of the state feedback mixedH2/ H-infinity problem.
Wednesday August 14, 2002
8:00-9:00 Room : 101 Plenary Talk
J. William Helton (University of California SanDiego)Manipulating Matrix Inequalities Automati-callyMatrix inequalities have come to be extremely impor-tant in systems engineering in the past decade. This isbecause many systems problems convert directly intomatrix inequalities. Matrix inequalities take the formof a list of requirements that polynomials or ratio-nal functions of matrices be positive semidefinite. Ofcourse while some engineering problems present ra-tional functions which are well behaved, many other

MTNS – 2002 60
problems present rational functions which are badlybehaved. Thus taking the list of functions which a de-sign problem presents and converting these to a niceform, or at least checking if they already have or donot have a nice form is a major enterprise. Since ma-trix multiplication is not commutative, one sees mucheffort going into calculations (by hand) on noncom-mutative rational functions. A major goal in sys-tems engineering is to convert “noncommutative in-equalities” to equivalent Linear Noncommutative In-equalities (that is, to LMI’s), if possible. The talkconcerns efforts to process “noncommutative inequal-ities” using computer algebra. The most basic efforts,such as determining when noncommutative polynomi-als are positive, convex, convertible to noncommuta-tive LMI’s, transformable to convex inequalities, etc.,force one to a rich area of undeveloped mathematics.
9:00-10:00 Room : 101 Invited Talk
Jan C. Willems (University of Leuven, Belgium)Dissipative Distributed SystemsThis talk deals with systems described by constantcoefficient partial differential equations. We start byintroducing the behavior of such systems, controlla-bility, and kernel and image representations. We thenturn to dissipative systems. The main issue here is theconstruction of a storage function. This leads to anapplication of Hilbert’s 17-th problem on the factor-ization of polynomials in many variables. Throughoutthe talk, we use Maxwell’s equations as a running ex-ample for motivating the problems and the concepts.The research on which this talk is based, is joint workwith Harish Pillai from the IIT Bombay.
9:00-10:00 Room : 102 Invited Talk
Albert-Laszlo Barabasi (University of Notre Dame),The Architecture of Complexity: Emergenceof Scaling in Complex NetworksSystems as diverse as the world wide web or thecell are described by networks with complex topol-ogy. Traditionally it has been assumed that thesenetworks are random. However, recent studies indi-cate that such complex networks are the result of self-organizing processes governed by simple but genericlaws, resulting in topologies strikingly different fromthose predicted by random networks. I will discuss theimplications of these findings on the error and attacktolerance of the Internet, the robustness of the cells,and other properties of complex evolving networks.
9:00-10:00 Room : 136 Invited Talk
Knut Hueper (University of Wurzburg, Germany),The Dynamics of Matrix Eigenvalue Algo-rithmsWe present a calculus approach to the convergenceanalysis of matrix eigenvalue algorithms includingthose methods as Jacobi, RQI, shifted QR, or Ric-cati iterations. New algorithms are developed, beingsomehow the true generalization of Rayleigh quotientiteration to full matrices, featuring cubic convergenceon all eigenvectors simultaneously.
Morning:
Room: 102, Session: WA1Chair: Raimund OberTitle: Immunology 3: Structure and Kinetics
10:30-11:10 Geometrical Methods in StructuralMolecular Biology,Timothy F. Havel (MIT)Structural molecular biology is concerned with therole played by the three-dimensional structures ofDNA, proteins and other molecules in biochemicalprocesses. A number of important problems in thisfield can be formulated in purely geometric terms, us-ing lower and upper bounds on the interatomic dis-tances to describe the sets of configurations of inter-est. The invariant theory of the Euclidean group, alsoknown as distance geometry, is the basis of practicalalgorithms for computer- aided geometric reasoningwith such distance constraints. This talk will describethe applications of these methods to protein homol-ogy modeling and structure determination by nuclearmagnetic resonance spectroscopy.
11:10-11:50 Kinetic aspects of TcR-MHC andAntibody-Antigen Interactions,Jefferson Foote (Fred Hutchinson Cancer ResearchCenter)Vertebrates develop immunity when they encounter anew microbe or foreign substance (antigen) becauseof a set of cells called lymphocytes. The immune re-ponse is a Darwinian process in which small numbersof antigen-recognizing lymphocytes are selected out ofa vast pool of lymphocytes that don’t recognize anti-gen. Each lymphocyte has on its surface unique anti-gen receptors whose molecular structure determinesfitness of the lymphocyte in such a selection. Onetype of lymphocyte, a B cell, has a surface receptorcalled an antibody. When antigen is present, parame-ters governing these cells’ fitness are the rate at whichthe antibody binds antigen (faster is better) and thelifetime of the antibody-antigen complex once it hasformed (longer is better, up to a point). A second type

MTNS – 2002 61
of lymphocyte, a T cell, has a surface antigen recep-tor called simply a T cell receptor (TCR). A TCR isstructurally similar to an antibody, but is specializedto react with the complex formed by embedding anantigen fragment in a cellular molecule called a Ma-jor Histocompatibility Complex molecule (MHC). Atan early stage of development, T cells that either don’tbind MHC at all or bind it too tightly are eliminated.Fitness here, in advance of any antigen contact, de-pends on a weak interaction with MHC that poten-tially could be improved if an antigen fragment werepresent. Parameters subsequently governing fitnessduring an immune response are again rate of forma-tion and lifetime of the TCR:(antigen+MHC) com-plex. Fast binding is probably an advantage, but along lifetime is a distinct disadvantage. The optimalrecognition signal occurs when a an antigen+MHCmolecule engages a TCR for some threshold time, dis-engages, engages with another TCR on the same cell,disengages, and so on.
11:50-12:30 Biophysical Considerations of T-CellReceptor-Peptide/MHC Interactions,Brian M. BakerNo Abstract
Room: 126, Session: WA2Chair: Martin HaenggiTitle: Computer Networks
10:30-10:50 Min-Plus System Theory Applied toCommunication Networks,Patrick Thiran, Jean-Yves Le Boudec(EPFL)Network Calculus is a set of recent developments,which provide a deep insight into flow problems en-countered in networking. It can be viewed as the sys-tem theory that applies to computer networks. Con-trary to traditional system theory, it relies on max-plus and min-plus algebra. In this paper, we show howa simple but important fixed-point theorem (residua-tion theorem in min-plus algebra) can be successfullyapplied to a number of problems in networking, suchas window flow control, multimedia smoothing, andbounds on loss rates.
10:55-11:15 Elements of Probabilistic NetworkCalculus for Packet Scale Rate GuaranteeNodes,Milan Vojnovic, Jean-Yves Le Boudec(EPFL)Packet Scale Rate Guarantee (PSRG) is a node modelused by IETF for Expedited Forwarding, a priorityservice defined in the context of Differentiated Ser-
vices. We review probabilistic performance boundsthat apply to PSRG nodes, and improve a previousbound for loss probability.
11:20-11:40 Statistical Performance Analysis of aGeneralized Processor Sharing System by Us-ing Large Deviations,Min Xie, Martin Haenggi(University of Notre Dame)This paper reviews the statistical performance anal-ysis of the tail of the steady-state queue length dis-tribution in a Generalized Processor Sharing (GPS)system. In particular, we focus on the Large Devi-ations Principle (LDP) which can be used to esti-mate a wide range of traffic sources, including short-range dependent sources, like processes with Marko-vian structure, and long-range dependent sources, likeself-similar traffic. Generally, performance bounds, ei-ther upper or lower, are derived to characterize theasymptotic behavior of the queue length for each ses-sion which shares the GPS server with multiple ses-sions. Other analysis methods, such as service-curvebased method, and bufferless fluid flow approxima-tions are introduced briefly. Finally, a comparison ofdifferent methods and the range where they can beapplied are given.
11:45-12:05 Resource Allocation and CongestionControl in Distributed Sensor Networks - aNetwork Calculus Approach,Jinsong Zhang, Kamal Premaratne(University of Miami)Peter Bauer (University of Notre Dame)The establishment of the overall objectives of a dis-tributed sensor network is a dynamic task so that itmay sufficiently well ’track’ its environment.To inte-grately perform both resource allocation to each in-put data flow and congestion control at each deci-sion node of such a network,a ’per-flow’ virtual queu-ing framework that decouples the input data flows toeach decision node is introduceded.Under this frame-work,network calculus notions are utilized to modelthe end-to-end flow and design a simple yet effectivefeedback control law for each input data flow.The con-trol strategy is robust against the time-varying na-ture of network delays and buffer depletion rate,andsource-node rate cutoff/saturation.
12:10-12:30 Optimal Media Streaming in a Rate-Distortion Sense For Guaranteed Service Net-works,Olivier Verscheure, Pascal Frossard(IBM T.J. Watson Research Center),Jean-Yves Le Boudec (EPFL)

MTNS – 2002 62
We present an optimal low-complexity schedulingstrategy of continuous media in a rate-distortion sensefor guaranteed service networks. First we consider astored and offline-compressed media stream. We givean explicit representation of the optimal smoothingstrategy, which minimizes the required playback de-lay and decoding buffer size. Then we provide thetheoretical bounds on the media rate such that (i) theoptimal smoothing solution meets some constraintson the admissible playback delay and maximum de-coding buffer size, and (ii) the media size is max-imum. Finally we cast the rate-distortion problemas a piece-wise linear convex optimization algorithm,which is solved efficiently using state-of-the-art linearprogramming techniques.
Room: 129, Session: WA3
Chair: Eric RogersTitle: Minicourse B: Multidimensional Systems
10:30-11:10 Recent Results on MultidimensionalBehaviors,Eva Zerz (University of Kaiserslautern, Germany)In the behavioral framework, control is based on theinterconnection of systems. We examine this approachand give some related results for behaviors that obeyOberst’s duality. There is a close relation to the ho-mological concept of extension modules. We will alsoaddress the question of causality, and we study firstorder representations of multidimensional behaviors.
11:10-11:50 Motivation and General Concepts inBehavioral Systems,Jan C. Willems (University of Leuven, Belgium)The aim of this introductory lecture is to outline thabasic philosophy that underlies the behavioral ap-proach to modeling open dynamical systems. Specialemphasis will be given to multi-dimensional systems.We will discuss some salient issues, such as kernel,image and latent variable representations, the elimi-nation problem, and controllability.
11:50-12:30 Similarities/Differences Between theBehavioral Approach for Multidimensionalversus Delay-Differential Systems,Heide Gluesing-Luerssen,(University of Oldenburg, Germany)This presentation will focus on what the structuralcommon ground between these the two different sys-tems classes and why do the theories kind of divergewhen it comes to the details.
Room: 136, Session: WA4
Chair: Paul Van DoorenTitle: Model Reduction
10:30-10:50 An Overview of Model ReductionMethods for Large-Scale Dynamical Systems,Thanos Antoulas (Rice University)No Abstract
10:50-11:10 Analysis of Smith-Type Methods forLyapunov Equations and Balanced Model Re-duction,Dan Sorensen (Rice University)No Abstract
11:10-11:30 Krylov Subspace Techniques for Re-duced Order Modeling of Nonlinear DynamicalSystem,Daniel Skoogh (Swedish Defence Research Agency),Zhaojun Bai (UC Davis)We discuss reduced-order modeling of nonlinear dy-namical systems by Krylov subspace methods. Wefocus on a method which the nonlinear system is firstapproximated by a bilinear system through Carlemanbilinearization. A reduced-order bilinear system isconstructed such that it matches certain number ofmultimoments corresponding to the first few kernelsof the Volterra-Wiener representation of the bilinearsystem.
11:30-11:50 Model Reduction of Second OrderSystems,Younes Chahlaoui, D. Lemonnier, K. Meerbergen, A.Vandendorpe, P. Van Dooren(Universite Catholique de Louvain)In this paper we look at model reduction of second or-der linear time-invariant system originating from me-chanical systems. We propose several methods pro-ducing reduced order models of second order as well,since it makes sense to impose the reduced-order sys-tem to be of the same type than the original one.
11:50-12:10 Model Reduction via Tangential In-terpolation,Antoine Vandendorpe, K. Gallivan, P. Van Dooren(Universite Catholique de Louvain)In this paper, we study the problem of model reduc-tion of a state space system via tangential interpola-tion. We show that the problem has a unique solutionif a particular Loewner matrix constructed from thedata is nonsingular. Under these conditions the inter-polating system can also be obtained as a projectionof the original system. This is a generalisation of the

MTNS – 2002 63
well known Multipoint Pade technique for tangentialinterpolation.
Room: 208, Session: WA5Chair: Daniel Alpay, Yuli EidelmanTitle: Time-Varying Systems and NumericalProblems
10:30-11:00 Unbounded J-inner Sections,Patrick Dewilde (Delft University of Technology),Daniel Alpay (Ben-Gurion University of the Negev)Rational J-inner-valued sections which are J-innerw.r. to the unit circle (J is a signature matrix) play animportant role in interpolation theory and related the-ories for optimal signal recovery and optimal control.A now classical result is the extension of these theo-ries to the time-varying context. These theories workwith bounded J-inner operators, here we consider theunbounded case. It gives rise to new, interesting andintriguing results.
11:00-11:30 Linear Time-Varying DarlingtonSynthesis,Avraham Feintuch (Ben-Gurion University)No Abstract
11:30-12:00 Reduction to System Methods forInversion of Diagonal Plus Semiseparable Op-erator Matrices,Yuli Eidelman, Israel Gohberg (Tel-Aviv University)We consider operator equations in a Hilbert spacewith a bounded linear operator represented by a fi-nite operator matrix which is a sum of a diagonaland of a semiseparable operator matrices. We discussthree methods for solution of such equations whichare based on reduction of the considering problemto a finite system of linear difference equations withboundary conditions. The obtained results yield newalgorithms for solution of integral equations and forinversion of matrices.
Room: 209, Session: WA6Chair: Erik VerriestTitle: Nonlinear Systems and Control 4
10:30-11:00 Parameter Tuning of a Non IntegerOrder PID Controller,Luigi Fortuna, Riccardo Caponetto (University ofCatania)Domenico Porto (STMicroelectronics, Catania)In this paper a new type of PID controllers is intro-duced and some properties are given. The novelty of
the proposed controllers consists in the extension ofderivation and integration order from integer to noninteger numbers. This approach provides a more flex-ible tuning strategy and therefore an easier achievingof control requirements with respects to classical con-trollers.
11:00-11:30 Nonlinear Discrete-Time ObserverDesign with Linearizable Error Dynamics,MingQing Xiao (Southern Illinois University at Car-bondale),Nikolaos Kazantzis (Worcester Polytechnic Institute),Costas Kravaris (University of Patras),Arthur J Krener (UC Davis)A necessary and sufficient condition for the existenceof a discrete-time nonlinear observer with linearizableerror dynamics is provided. The necessary and suffi-cient condition derived is associated with the solvabil-ity of a nonlinear functional equation. A corollary isSiegel’s theorem on the linearizability of a mapping.The method of observer design suggested by this theo-rem is constructive and can be applied approximatelyto any sufficiently smooth, linearly observable systemyielding a local observer with approximately linear er-ror dynamics.
11:30-12:00 Analysis of Periodic Solutions ofTapping-Mode AFM: An IQC Approach,Murti Salapaka, Abu Sebastian(Iowa State University)The feedback perspective with the cantilever viewedas a linear system and the tip-sample interaction ap-pearing as a nonlinear feedback is useful in analyzingAFM (Atomic Force Microscope) dynamics. Condi-tions for the existence and stability of periodic solu-tions for such a system when forced sinusoidally areobtained. These results are applied to the case wherethe AFM is operated in the tapping-mode. The nearsinusoidal nature of periodic solutions is establishedby obtaining bounds on the higher harmonics. Theconcept of Integral Quadratic Constraints (IQC) iswidely used in the analysis.
12:00-12:30 Bifurcations of the Controlled Es-cape Equation,Tobias Gayer, (University of Augsburg)In this paper we present numerical methods for theanalysis of nonlinear autonomous control systems andtwo conditions, local accessibility and an inner-paircondition, under which they can be applied. Thesemethods can be extended to work also for systemswith time-periodic right hand side. In particular, theescape equation with sinusoidal driving term and ad-ditional control is analyzed. We will show that its

MTNS – 2002 64
stability behavior undergoes interesting bifurcationswhen the range of the control influence is varied.
Room: 210, Session: WA7Chair: Rodolphe SepulchreTitle: Discrete Event and Hybrid Systems
10:30-10:50 Switched Systems that are Periodi-cally Stable may be Unstable,Jacques Theys, Vincent Blondel(Catholic University of Louvain),Alexander Vladimirov (Russian Academy of Science)We prove the existence of pairs of matrices A0 andA1 with real entries that are such that all infinite pe-riodic products of the two matrices converge to zero,but some infinite non-periodic product does not.
10:50:11:10 The Servo Problem for PiecewiseLinear Systems,Stefan Solyom, Anders Rantzer(Lund Institute of Technology)The servo problem for a wide class of nonlinear sys-tem is considered. A quantitative bound on systemtrajectories is derived. For piecewise linear systemsthe bound is shown to be computable in terms of lin-ear matrix inequalities.
11:10-11:30 Stability of Hybrid Control SystemsBased on Time-State Control Forms,Yoshikatsu Hoshi, Mitsuji Sampei, Shigeki Nakaura(Tokyo Institute of Technology)Time-State Control Form was proposed as a con-trol method for nonholonomic systems. This methodneeds input switching, so there is a drawback thatthe switching conditions may spoil the stability of thesystem. From the above backgrounds, this paper con-siders the stability of Time-State Control Form fromthe viewpoint of hybrid systems. We derive two kindof sufficient conditions which stabilize the systems byusing Lyapunov functions.
11:30-11:50 Discrete-Time Modeling and Analy-sis of Pulse-Width-Modulated Switched PowerConverters,Willem L. De Koning, Jacob W. Van Der Woude,Yusuf Fuad(Delft University of Technology)The subject of this paper is a general theory forswitched power converters, where the switch is pulse-width-modulated. The existence, uniqueness andstabi- lity of stationary solutions is investigated. Fur-thermore, feedback control situations are considered.It is shown that a running and fixed modulator, may
invoke a very different behaviour of the feedback con-trol system. Subharmonic oscillations are shown tobe normal unstable behaviour.
11:50-12:10 On the Control of the Resonant Con-verter: A Hybrid-Flatness Approach,Hebert Sira-Ramirez, Ramon Silva-Ortigoza(CINVESTAV-IPN)In this article we show that the series resonantDC/DC converter, which is a hybrid system, is piece-wise differentially flat with a flat output which is in-variant with respect to the structural changes under-gone by the system evolution. This fact considerablysimplifies the design of a switching output feedbackcontroller that can be essentially solved by linear tech-niques. Flatness clearly explains all practical issuesassociated with the normal operation of the converter.
12:10-12:30 Controllability of PeriodicallySwitched Linear Systems with Delay in Con-trol,Guangming Xie, Long Wang, Yijing Wang(Peking University, Beijing)The controllability for switched linear systems withtime-delay in control are first formulated and investi-gated. A sufficient and necessary condition for con-trollability of periodically switched linear systems ispresented. Furthermore, it is proved that the control-lability can be realized in n + 1 periods at most. Anexample illustrates the above results. Some furtherresults are also presented.
Middle:
Room: 102, Session: WM1Chair: Raimund OberTitle: Immunology 4: Diffusion and Modelling
14:00-14:40 Measuring Lateral Diffusion and As-sociations of MHC Molecules in Membranes ofthe ER and at the Cell Surface,Michael Edidin (Johns Hopkins University)No Abstract
14:40-15:20 A Computational Model for T CellReceptor Signal Integration,Mark Alber (University of Notre Dame),Arancha Casal, Cenk Sumen, Tim Reddy, MarkDavis, Peter Lee(Stanford University)T cells play a central role in orchestrating the adap-tive immune response. Specificity of T cells is de-fined by each cell expressing a unique population of

MTNS – 2002 65
T cell receptors (TCRs) which interact with specificpeptide-MHC (pMHC) on other cells, such as antigen-presenting cells (APC).XSCC During recognition, theT cell surface comes in direct contact with that ofthe APC. Within the first 30-60 seconds of contact,the T cell makes the critical decision to either sus-tain the interaction, eventually leading to activation,or to disengage and move on. Over this brief period,thousands of TCRs interact with thousands of differ-ent pMHCs with a wide range of affinities. The Tcell must quickly survey and integrate this vast arrayof signals into its critical decision. Learning how aT cell perceives this vast, heterogeneous repertoire iscritical to understanding not only T cell biology, butalso certain disease evasion mechanisms. Mathemat-ical models and computer simulations can help over-come experimental limitations. If biologically-soundand well-informed, a computational model such as theone we propose here can result in valuable insights intothe T cell recognition process.
15:20-16:00 Immunological Synapse Formation:A Crossroad of Physical Chemistry and CellBiology,Arup K. Chakraborty(University of California, Berkeley)No Abstract
Room: 126, Session: WM2Chair: Aleksandar KavcicTitle: Control and Communications
14:00-14:20 Feedback Capacity,Sekhar Tatikonda, Sanjoy Mitter(MIT)In this paper we provide a general framework forcharacterizing the capacity of a large variety of chan-nels with memory, side-information, intersymbol in-terference, and feedback. For Markov channels weshow that one can formulate the capacity optimiza-tion problem as a dynamic program and compute thecapacity using tools from approximate dynamic pro-gramming. Feedback codes are then discussed.
14:20-14:40 Sum-Product Algorithm and Feed-back Capacity,Shaohua Yang, Aleksandar Kavcic(Harvard University)In this paper, we explore the link between the sum-product algorithm and the feedback capacity of achannel with memory. We show that the optimal(i.e., capacity-achieving) feedback is captured by thecausal posterior state probabilities. For finite-statemachine channels, the optimal feedback is captured
by the forward recursion of the sum-product (Baum-Welch, BCJR) algorithm. This result drastically re-duces the space over which the optimal feedback-dependent source distribution needs to be sought.Further, the feedback capacity computation may thenbe formulated as an average-reward-per-stage stochas-tic control problem, for which numerical solutionsof Bellman’s equation deliver the feedback-capacity-achieving source distribution. With the knowledge ofthe capacity-achieving source distribution, the valueof the capacity is easily estimated using accurateMarkov chain Monte Carlo methods. We demon-strate the applicability of the method by computingthe feedback capacity of partial response channels andthe feedback capacity of run-length-limited (RLL) se-quences over binary symmetric channels (BSCs).
14:40-15:00 Kalman Filtering, Factor Graphs,and Electrical Networks,Pascal O. Vontobel, Dani Lippuner,Hans-Andrea Loeliger(ETH)Factor graphs are graphical models with origins incoding theory. It is well known that Kalman filteringis an instance of the generic sum(mary)-product algo-rithm on the corresponding factor graph. In this pa-per, a one-to-one correspondence between such factorgraphs and a class of electrical networks is presented.The electrical network ”computes” correct Bayesianestimates even for factor graphs with cycles.
15:00-15:20 Kalman Filtering Applied to TimingRecovery in Tracking Mode,Panu Chaichanavong (Stanford University)Brian Marcus (IBM Almaden)This paper investigates the performance of theKalman filter as a timing recovery system in track-ing mode, subject to a wide range of operating con-ditions. Our simulation compares the Kalman filterand the phase-locked loop based on the number of di-vergences for various values of timing disturbance andSNR. They are shown to work equally well in low SNRand disturbance. However, the Kalman filter outper-forms the phase-locked loop when both SNR and dis-turbance are high. The simulation also suggests thatthe Kalman filter is more robust to variations in op-erating conditions.
15:20-15:40 Lower Bounds for the Performanceof Iterative Timing Recovery at low SNR,Aravind Nayak, J. Barry, S. McLaughlin(Georgia Institute of Technology)We consider the problem of timing recovery at lowsignal-to-noise ratio. We first derive a lower bound for

MTNS – 2002 66
the timing estimation error variance in the presenceof a random walk timing jitter, for the PR-IV chan-nel. Then, we look at the trained phase-locked loop,which gives a hueristic lower bound for the perfor-mance of iterative timing recovery schemes involvingphase-locked loops.
15:40-16:00 Classical Capacity of QuantumChannels,Navin Khaneja (Harvard University)No Abstract
Room: 129, Session: WM3Chair: Krzystof Galkowski, Eric Rogers, Victor Vin-nikovTitle: Multidimensional Systems 3
14:00-15:00 Conservative Multidimensional Sys-tems: A Survey,Joseph A. Ball (Virginia Tech)We survey a number of classes of ISO systems forwhich an energy balance relation holds. Such systemslead to transfer functions with membership in varioustypes of multivariable generalizations of the classicalSchur class, including holomorphic functions of severalvariables, bundle maps between bundles over a Rie-mann surface and formal power series in noncommut-ing indeterminates. Connections with Lax-Phillipsscattering in this context will also be discussed.
15:00-15:30 On J-Conservative Scattering nDSystem Realizations,Dmitry Kalyuzhniy-Verbovetzky(The Weizmann Institute of Science)We extend the notion of discrete conservative scat-tering nD system to the case where its state spaceis endowed with the structure of a Krein space bymeans of a canonical symmetry J. We call such sys-tems J-conservative. We prove that any operator-valued function holomorphic on some neighbourhoodof the origin in the complex space of n variables andvanishing at the origin has a J-conservative scatteringnD system realization.
15:30-16:00 Factorization of M-D PolynomialMatrices for Design of M-D Multirate Systems,Mikhail Tchobanou (Moscow Technical University),Cynthia Woodburn (Pittsburg State University)The problem of the design of effective 2-D and 3-Dmultirate systems with prescribed properties is con-sidered using tools from commutative algebra. Re-sults for factoring 2-channel polyphase matrices arepresented. After such a factorization, the number of
computations may be reduced. For a 3-channel multi-rate system, an algorithmic version of Suslin’s stabil-ity theorem may be useful for factoring the polyphasematrices.
Room: 136, Session: WM4
Chair: Uwe HelmkeTitle: Control and Computation
14:00-14:30 Continuation of Eigendecomposi-tions,Luca Dieci (Georgia Tech)In this talk we discuss the problem of smooth con-tinuation of eigendecompositions. In particular, wediscuss the cases of the Schur decomposition and ofbi-diagonal form. Connected to these, we discuss con-tinuation of Hessenberg forms. This is joint work withA. Papini, Univ. of Florence.
14:30-5:00 Numerical Solution of Euclidean Bal-anced Norm Realizations via Gradient Flows,N. Del Buono, L. LopezNo Abstract
15:00-15:30 Controllability of the QR Algorithmon Hessenberg Flags,Uwe Helmke, Jens Jordan(University of Wurzburg)The shifted QR algorithm can be interpreted as anonlinear discrete dynamical system on the flag man-ifold. In the complex case we describe the reachabil-ity sets as orbits of a group action and prove non-controllability of the algorithm. In contrast, the algo-rithm restricted on the subset of Hessenberg flags isgenerically controllable.
15:30-16:00 The Continuos-Time Rayleigh Quo-tient Flow on the Grassmann Manifold,Rodolphe Sepulchre, P.-A. Absil(University of Liege),R. Mahony (Australian National University)An extension of the Rayleigh quotient iteration (RQI)to the Grassmann manifold has been recently pro-posed for computing a p-dimensional eigenspace of asymmetric matrix A. Here we analyze a continuous-time flow analogous to this Grassmannian RQI. Thisflow achieves deflation in finite time, i.e. it convergesin finite time to a subspace that includes an eigenvec-tor of A.

MTNS – 2002 67
Room: 209, Session: WM5Chair: Anthony BlochTitle: Algebraic and Differential Geometry inSystems Theory
14:00-14:20 Hamiltonian Structure of the Alge-braic Riccati Equation and its Infinitesimal V-Stability,Nanaz Fathpour, Edmond A. Jonckheere(University of Southern California)We will investigate the stability behavior of quadraticmaps in higher dimensions. We will establish the con-nection between infinitesimal V-stability of solutionsto the Algebraic Riccati Equations, and the Hamil-tonian eigenstructure of the solutions. InfinitesimalV-stability of critical points of the Riccati map is cru-cially related to stability of the Riccati map. GrobnerBases are used to implement the calculations.
14:20-14:40 Global Transformation of NonlinearDynamic Systems into Canonical Forms,Anna Michtchenko, Aleksey Zhirabok(Far Eastern State University)The problem of transformation of nonlinear systemsinto canonical forms is studied. Both continuous-timeand discrete-time cases are considered. Sufficient andnecessary conditions for such transformation are ob-tained. A special mathematical technique (so-calledthe algebra of functions) is used.
14:40-15:00 A Lie-Group Approach for Nonlin-ear Dynamic Systems Described by ImplicitOrdinary Differential Equations,Kurt Schlacher (University of Linz),Andreas Kugi (University of Saarland),Kurt Zehetleitner (University of Linz)This contribution presents a Lie-group based ap-proach for the accessibility and the observability prob-lem of dynamic systems described by a set of im-plicit ODEs. It is shown that non-accessible or non-observable systems admit Lie groups acting on theirsolutions such that distinguished parts of the systemremain unchanged. The presented methods use thefact that the dynamic system may be identified witha submanifold in a suitable jet-bundle.
15:00-15:20 Quotients of Fully Nonlinear Con-trol Systems,Paulo Tabuada, George J. Pappas(University of Pennsylvania)In this paper, we define and study quotients for fullynonlinear control systems. Our definition is inspiredby categorical definitions of quotients as well as re-cent work on abstractions of affine control systems.We show that quotients always exist under mild reg-
ularity assumptions, and characterize the structure ofthe quotient control bundle. We also introduce a no-tion of projectability which turns out to be equivalentto controlled invariance. This allows to regard previ-ous work on symmetries, partial symmetries, and con-trolled invariance as leading to special types of quo-tients. We also show the existence of quotients thatare not induced by symmetries or controlled invari-ance.
15:20-15:40 The Wave Equation as a Port-Hamiltonian System, and a Finite DimensionalApproximation,Viswanath Talasila, Goran Golo, Arjan van derSchaft(University of Twente)The problem of approximating a distributed param-eter system with free boundary conditions is solvedfor the 2-dimensional wave equation. To this endwe first model the wave equation as a distributed-parameter port Hamiltonian system. Then we em-ploy the idea that it is natural to use different finiteelements for the approximation of different geometricvariables (forms) describing a distributed-parametersystem, to spatially discretize the system and we showthat we obtain a finite-dimensional port-Hamiltoniansystem, which also preserves the conservation laws.
15:40-16:00 Pseudo Balancing for Discrete Non-linear Systems,Erik Verriest (Georgia Institute of Technology)A rationale is presented to extend the notion of a bal-anced realization to nonlinear discrete time systemsHowever, it is shown that even with a set of very rea-sonable assumptions, it is not possible to construct aglobally balanced realization. The obstruction stemsfrom certain integrability conditions which are gener-ically not satisfied. One way around this is to relaxthe requirements of global balancing by restricting thebalancedness conditions to a discrete set of points inthe state space.
Room: 210, Session: WM6Chair: Panos Antsaklis, Anthony MichelTitle: Hybrid Control System Analysis, Synthe-sis and Diagnosis
14:00-14:30 Partial Stability of Dynamical Sys-tems,Ye Sun, A.P. Molchanov, A.N. Michel(University of Notre Dame)We develop new results for partial stability of generaldynamical systems with respect to invariant sets de-fined on metric space, using stability preserving map-

MTNS – 2002 68
pings. Our results are applicable to a much largerclass of systems than existing results, including to dy-namical systems that cannot be determined by theusual classical (differential) equations. Furthermore,in contrast to existing results which pertain primarilyto the analysis of equilibria, the present results ap-ply to invariant sets (including equilibria as a specialcase). We apply our results in the analysis of a classof discrete event systems (a computer load balancingproblem).
14:30-15:00 An Approach to General SwitchedLinear Quadratic Optimal Control Problemswith State Jumps,Xuping Xu (Penn State Erie),Panos Antsaklis (University of Notre Dame)Unlike conventional optimal control problems, op-timal control problems of switched systems requirethe solutions of not only the optimal continuous in-puts but also the optimal switching sequences. In aprevious paper by the authors, an approach for animportant class of switched systems optimal controlproblems, namely, general switched linear quadratic(GSLQ) problems where each subsystem is linear andthe cost functionals are in general quadratic forms,was reported. In this paper, we extend the approachto GSLQ problems with state jumps at the switch-ing instants. For such problems, the cost functionalsinclude not only the general quadratic cost terms forthe state and the input but also the costs for statejumps. The approach in this paper allows us to derivethe derivatives of the optimal cost with respect to theswitching instants based on the solution of the discon-tinuous Riccati equation parameterized by the switch-ing instants along with its differentiations. With theknowledge of the derivatives, nonlinear optimizationmethods can be applied to locate the optimal switch-ing instants. An example is provided to illustrate theapproach.
15:00-15:30 The Controlled Composition Analy-sis of Hybrid Automata,Ying Shang, M.D. Lemmon(University of Notre Dame)This paper presents a sufficient condition for the exis-tence of global non-terminating solutions in controlledhybrid automata. The condition is based on a recur-sive algorithm that can always terminate after a finitenumber of iterations to a limit set of states called theinner viability kernel. The inner viability kernel iseasily computed in some cases. The inner viabilityapproach can ensure the composition analysis of con-trolled hybrid automata.
15:30-16:00 Monitoring and Diagnosis of HybridSystems Using Particle Filtering Methods,Xenofon Koutsoukos, James Kurien, Feng Zhao(Palo Alto Research Center)Embedded systems are composed of a large number ofcomponents that interact with the physical world viaa set of sensors and actuators, have their own com-putational capabilities, and communicate with eachother via a wired or wireless network. Diagnosticsystems for such applications must address new chal-lenges caused by the distribution of resources, the net-working environment, and the tight coupling betweenthe computational and the physical worlds. Our ap-proach is to move from centralized, discrete or con-tinuous techniques toward a distributed, hybrid di-agnosis architecture. Monitoring and diagnosis ofany dynamical system depend crucially on the abil-ity to estimate the system state given the observa-tions. Estimation for hybrid systems is particularlychallenging because it requires keeping track of multi-ple models and the transitions between them. Thispaper presents a particle filtering based estimationalgorithm that addresses the challenge of the inter-action between continuous and discrete dynamics inhybrid systems. The hybrid estimation methodologyhas been demonstrated on a rocket propulsion system.
Room: 208, Session: WM7Chair: Giorgio PicciTitle: Stochastic Systems 2
14:00-14:30 State Space Realization of RandomProcesses with Feedback,Giorgio Picci, Alessandro Chiuso(University of Padova)Construction of the state space of a stochastic processwith exogenous inputs when feedback may be present.
14:30-15:00 Approximate Realization of HiddenMarkov Chains,Lorenzo Finesso (LADSEB-CNR, Padova)Peter Spreij (University of Amsterdam)No Abstract
15:00-15:30 Random Sampling of a Continuous-Time Stochastic Dynamical System,Mario Micheli, Michael I. Jordan(Brown University)We consider a dynamical system where the state equa-tion is given by a linear stochastic differential equa-tion and noisy measurements occur at discrete times,in correspondence of the arrivals of a Poisson process.After formulating a Kalman Filter-based state esti-mation algorithm, we compute a complete statistical

MTNS – 2002 69
description of the state estimation error process andanalyze its dependence on the continuous-time sys-tem’s dynamics and the sampling rate.
15:30-16:00 The Hilbert Space of an Ergodic Se-quence,Giorgio Picci, (University of Padova)Tom Taylor (Arizona State University)Given a semi infinite time series, it has been shownthat under some natural assumptions of existence oflimits of certain time averages, an essentially uniquestationary stochastic process exists which producesthe observed trajectory according to the classical“urn” scheme of probability theory.
Afternoon:
Room: 102, Session: WP1Chair: Raimund OberTitle: Immunology 5: Cellular Aspects
16:30-17:30 Staining Antigen Specific CD4+ T-Cells with Class II MHC Oligomers,Lawrence Stern (MIT)No Abstract
17:10-17:40 The Roles of Serial Engagement andKinetic Proofreading in Peptide-Induced T-Cell Activation,Dan Coombs, Carla Wofsy, Byron Goldstein(Los Alamos National Laboratory)The activation of a T-cell requires the formationof a long-lived attachment to an antigen-presentingcell (APC). APCs present peptide on their surfaces,held by a major-histocompatibility complex (MHC).A given T-cell carries receptors (TCRs) specific fora particular MHC-peptide group, along with otherless specific adhesion and costimulatory molecules.The stable region of close apposition (immunologicalsynapse) may facilitate signal transduction, by con-centrating the TCR and MHC-peptide together andallowing long-lived bond formation. A TCR will be-come activated if it can form a sufficiently long-livedbond to allow multiple biochemical changes to occur(the kinetic proofreading hypothesis). We have de-veloped a mathematical model to examine the TCR-MHC-peptide interaction within the stable region anduse it to study (1) the competing effects of serial en-gagement (sequential activation of TCR by one MHC-peptide) and kinetic proofreading, and (2) the possiblerole of TCR oligomerization in activation of T-cells.In conjunction with the model, recent experimentaldata indicates that activated TCR must remain ac-tive for a period after dissociation from MHC-peptide.
Recent extensions of the model to deal with other sit-uations will also be presented.
Room: 126, Session: WP2
Chair: Roxana SmarandacheTitle: Cryptography
16:30-17:00 A High-Speed Processing for RSACryptograms Using High-Radix Signed-DigitNumbers and a New Algorithm of Modulo Op-eration,Yoshinori Fujisawa, Yasushi Fuwa(Nagano National College of Technology)In this work, we developed a high speed LSI for encod-ing and decoding the RSA cryptogram and describethe processing method in this paper. In this paper,we proposed two new processing algorithms for anRSA public key cryptogram system. Then, we de-veloped LSI to realize our proposed algorithm usinga sequential processing algorithm for calculating re-mainders. As a result, it was clear that the methodusing our proposed algorithm works faster than theprevious method.
17:00-17:30 On the Rational Cubic Curve Cryp-tosystems,Xiaochang Wang, Heather Henkel(Texas Tech University)In this paper, we study the group on the finite fieldof q elements plus infinity induced by rational cubiccurves. We show that the group is isomorphic to eithera subgroup of order q+1 of the multiplicative groupof the finite field of q square elements, or the additivegroup, or multiplicative group, of the original field.
17:30-18:00 Public Key Cryptography Based onSimple Modules over Simple Rings,Gerard Maze(EPFL),Christopher Monico (University of Notre Dame),Joan-Josep Climent (University of Alicante),Joachim Rosenthal (University of Notre Dame)We show how the action of a (semi)ring on a(semi)module gives rise to a generalized Diffie-Hellman protocol. This leads naturally to a crypto-graphic protocol whose security relies on a finite ver-sion of a difficult control problem - steering the stateof a dynamical system from an initial vector to somefinal location.

MTNS – 2002 70
Room: 129, Session: WP3Chair: Krzystof Galkowski, Eric Rogers, Victor Vin-nikovTitle: Multidimensional Systems 4
16:30-17:00 Spatial Restoration with ReducedBoundary Error,Nirmal Bose, Jaehoon Koo(The Pennsylvania State University)Since any symmetric BTHTHB matrix can be di-agonalized by the DCT matrix, a BTTB matrixencountered in the image reconstruction problem issometimes approximated by a BTHTHB matrix forcomputational efficiency. In this paper, the errorcaused by the approximation of a BTTB matrix by aBTHTHB matrix is analyzed. It is also shown that asimple modification of the observed image can achieveboth reduced boundary error and fast deblurring.
17:00-17:30 On Succesive Packing Approach toMultidimensional (M-D) Interleaving,Sankar Basu (IBM T. J. Watson Research Center),Xi Min Zhang, Yun Q. Shi(New Jersey Institute of Technology)We propose an interleaving scheme for multidimen-sional (M-D) interleaving. To achieved byusing anovel concept of basis interleaving array. A generalmethod of obtaining a variety of basis interleaving ar-rays is presented. Based on the basis interleaving ar-ray, we then propose an interleaving technique, calledsuccessive packing, to generate the interleaved arrayof arbitrary size. It is shown that the proposed tech-nique can spread any error burst of mk
0 ×mk1 within
mn0 ×mn
1 array (1 ≤ k ≤ n− 1) effectively so that theerror burst can be corrected with simple random errorcorrecting-code (provided the error correcting-code isavailable). It is further shown that the technique isoptimal for combating a set of arbitrarily-shaped errorbursts. Since this algorithm needs to be implementedonly once for a given M-D array, the computationalcost is is low.
17:30-18:00 Matrix Functions in HomomorphicSignal Processing,Eduard Krajnik (Czech Technical University)Yamada et al. suggested replacing the traditional cep-strum operator used in homomorphic signal process-ing by a finite-dimensional alternative called isomor-phic operator. This paper sheds another light on theisomorphic operator in terms of two matrix functions:exponential and logarithm. Closed form formulas for1–D and 2–D cases are presented.
18:00-18:30 Cellular Automata in Image Pro-cessing,
Adriana Popovici, Dan Emanuel Popovici(University of the West Timisoara, Romania)Cellular automata can be successfully applied in im-age processing. In this paper we discuss the applica-tion of two-dimensional cellular automata to the prob-lems of noise removal and border detection in digitalimages. The proposed methods are compared withsome classical or recent methods. A very importantfeature of the proposed methods is their intrinsic par-allelism, since they are implemented on well-knownparallel-working machines, as cellular automata are.
Room: 136, Session: WP4Chair: Biswa Nath Datta, Floyd B. HansonTitle: Large-Scale Computations in Control
16:30-16:50 Projection Methods for ReducedOrder Modeling with Guaranteed Stability,Thanos Antoulas (Rice University)No Abstract
16:55-17:15 Computational Methods for Portfo-lio and Consumption Policy Optimization inLog-Normal Diffusion, Log-Uniform Jump En-vironments,Floyd B. Hanson (University of Illinois at Chicago),J. J. Westman (UCLA)Computational methods for a jump-diffusion portfo-lio and consumption policy optimization applicationusing a log-uniform jump distribution with the usuallog-normal diffusion are considered. Jump-diffusionparameter estimations from a companion stochastictheory paper are applied for more model realism.The computational complexity of stochastic dynamicprogramming is reduced by the canonical Constant-Relative-Risk-Adverse utility model.
17:20-17:40 Partial Eigenvalue Assignment inLinear Systems: Existence, Uniqueness andNumerical Solution,Biswa N. Datta (Northern Illinois University),Daniil R. Sarkissian (Mississippi State University)The problem of reassigning a part of the open-loopspectrum of a linear system by feedback control, leav-ing the rest of the spectrum invariant, is called thepartial eigenvalue assignment problem. In this pa-per, we derive new necessary and sufficient conditionsfor existence and uniqueness of solution of the par-tial eigenvalue assignment problem and then presenta practical parametric algorithm to numerically solveit. The algorithm is feasible for large-scale solutionand computationally viable. It also offers an oppor-tunity to devise a robust solution to the problem byexploiting the arbitrary nature of the parameters.

MTNS – 2002 71
17:45-18:05 Model Reduction via an ExplicitlyRestarted Lanczos Algorithm,Vasilios Papakos, Imad M. Jaimoukha(Imperial College,London)The nonsymmetric Lanczos algorithm, which belongsto the class of Krylov subspace methods, is increas-ingly being used for model reduction of large scale sys-tems in state space form, to exploit the sparse struc-ture and reduce the computational burden. However,a good approximation is, usually, achieved only withrelatively high order reduced models. Moreover, thecomputational cost of the Lanczos algorithm is dom-inated by the full rebiorthogonalization procedure,which is necessary because the Lanczos vectors tendto lose their biorthogonality. A method based on lin-ear fractional transformations (LFTs) is proposed tocompute a reduced mth order model by applying ksmall Lanczos algorithms with m/k steps each; thusreducing the computational cost and storage require-ments. Applying this method, one can compute atridiagonal similar realization of f(s) and when com-bined with conventional model reduction techniques,a minimal or reduced realization.
Room: 208, Session: WP5Chair: J. William HeltonTitle: Expressing Polynomials as Sums ofSquares Together with Applications
16:30-17:10 How to Write a Polynomial as a Sumof Squares of Polynomials, and Why You’dWant to Do So,Bruce Reznick (University of Illinois)A fundamental question about a real polynomial iswhether it takes only non-negative values. If the poly-nomial is a sum of squares of polynomials, then theanswer to this question is ”yes”. Recent advances inimplementing an old algorithm via semidefinite pro-gramming allow one to answer the ”sum of squares”question rapidly. (This is connected to Hilbert’s 17thProblem.) The talk will be expository, light on ab-straction and filled with concrete examples.
17:10-17:30 Applications of Our Newfound Fa-cility in Expressing Polynomials as Sums ofSquares.,Pablo A. Parrilo (ETH)No Abstract
17:30-17:50 Reduced Representations of PositivePolynomials,Mihai Putinar (UC Santa Barbara)It is known from Emil Artin’s theory of ordered fieldsthat a positive polynomial on a semi-algebraic set can
be written as a sum of squares of rational functions,with some control over the form of the denominators.By using methods of operator theory (subnormal tu-ples, hereditary calculus, moment problems) we willdescribe two possible simplifications in Artin’s repre-sentation: a reduction from the multiplicative conegenerated by the defining polynomials of the supportset to the additive cone, and a reduction from realvariables in an even dimensional space to complexones. An altenative, purely algebraic approach to thefirst simplification was recently obtained by T.Jacobiand A.Prestel.
17:50-18:10 Recent Progress in Polynomial Op-timization,Ruchira Datta (UC Berkeley)No Abstract
18:10-18:30 Bounding Linear PDEs via Semidef-inite Optimization,Constantine Caramanis, Dimitris Bertsimas(MIT)We apply some recent results of algebraic geometry,to show how the underlying geometry of an optimiza-tion problem may be incorporated in a natural way,in a semidefinite optimization formulation. We dis-cuss two examples; the first, an application to partialdifferential equations, and the second, an applicationto deriving optimal inequalities in probability theory.Both illustrate the strength of the geometry inducedconstraints.
Room: 209, Session: WP6Chair: Viswanath RamakrishnaTitle: Quantum Engineering II
16:30-17:10 Optimal Control of Laser Cooling: ATheory of Purity Increasing Transformations,David Tannor, Shlomo Sklarz( The Weizmann Institute)The powerful techniques of Optimal Control Theory(OCT), used in recent years for a variety of quan-tum mechanical problems are applied to the problemof laser cooling in molecules. This is a striking newmechanism in which the system does not lose energyat intermediate times, but grows more coherent; onlyat the end of the process is the coherent or pure statemanipulated into the lowest energy state. The keycomponents of the theory – the definition of cooling aspurity increase; the invariance of the purity to controlfields; and a closed form for the optimal cooling tra-jectory – correspond to the zeroth, second and thirdlaws of thermodynamics, filling a longstanding needfor thermodynamic formulation of laser cooling.
MTNS – 2002 72
17:10-17:30 Controllability of Pairs of CoupledQuantum Dots,Viswanath Ramakrishna(University of Texas at Dallas)This article studies the controllability of a pair of cou-pled quantum dots being interrogated by an externalelectromagnetic field. It is shown that this systemis controllable. However, in the limit of large spa-tial separation between the two dots the dynamicalLie algebra of the problem degenerates to the com-plex representation of so(4) in su(4). The question ofwhich pure and mixed states for the system are acces-sible from the initial condition is then studied via anab initio approach. This is achieved by finding an ex-plicit conjugation, within su(4), between the complexrepresentation of so(4) and su(2)⊗su(2), and then us-ing the greater structure of the group SU(2)⊗SU(2).
17:30-17:50 Constructive Control of QuantumSystems,Sonia Schirmer, A.D. Greemtree(Open University, Milton Keynes)The problem of explicit generation of unitary opera-tors for atomic systems with degenerate energy levelsis considered. The Lie algebra structure is used to de-rive control schemes for the creation of arbitary super-position states and selective population interchangesfor a transition between two three-fold degenerate en-ergy levels.
17:50-18:10 Use of Wei-Norman Formulae andParameter Differentiation in Quantum Con-trol,Claudio Altafini (SISSA-ISAS)For the unitary operator, solution of the Schrodingerequation corresponding to a time-varying Hamilto-nian, the relation between the Magnus and the prod-uct of exponentials expansions can be expressed interms of a system of first order differential equationsin the parameters of the two expansions, often referredto as Wei-Norman formula. It is shown how to useWei-Norman formulae for the purposes of quantumcomputing.
18:10-18:30 Control of Quantum MechanicalSystems with Minimum Number of Switches,Domenico D’ Alessandro (Iowa State University)Given two linearly independent skew symmetric ma-trices every rotation matrix can be written as theproduct of alternate elements from the correspondingone dimensional subgroups. In this talk, we evaluatethe minimum number of factors required for the fac-torization of a given rotation matrix and provide analgorithm to determine the factors in the optimal fac-
torization explicitly. The results can be applied to thebang bang control with minimum number of switchesof two level quantum systems. We also discuss thegeneral problem of uniform finite generation of com-pact Lie groups.
Thursday August 15, 2002
8:00-9:00 Room : 101 Plenary Talk
Eduardo Sontag (Rutgers University)On Systems Molecular Biology and ControlTheoryWe discuss some of the central topics in ”systems”(”post-genomic”) molecular biology, and how some ofthe basic concepts and ideas of control theory mighthelp in understanding basic issues such as feedback,stability, systems identification, and switching. Whileproblems in this new and exciting field ”sound” simi-lar to standard problems in control theory, the techni-cal details are often different enough so as to presenttotally new theoretical challenges.
9:00-10:00 Room : 126 Invited Talk
Olof Staffans (Abo Akademi University),Passive and Conservative Infinite-DimensionalImpedance and Scattering Systems (from aPersonal Point of View)A system is conservative if both the system itself andits dual system preservs energy. It is passive if it doesnot contain any internal energy sources. The wordsscattering and impedance in the title describe howthe system interacts with its surroundings, i.e, it de-fines the meaning of the word ”energy”. We presentthe basic theory for discrete and continuous time lin-ear infinite-dimensional systems which are impedanceor scattering passive or conservative. We also de-scribe how to go from continuous time to discrete timeand back (using the Cayley transform), and from animpedance to a scattering setting (using a modifiedfeedback transform). We point out that every con-tractive analytic function in the right half-plane hasa continuous time scattering conservative realization,and that most positive (real) functions in the righthalf-plane have a continuous time impedance conser-vative realization. We finally say a few words aboutlossless systems (i.e., systems which do not containinternal energy sources, sinks, or traps).

MTNS – 2002 73
9:00-10:00 Room : 129 Invited Talk
Wolfgang J. Runggaldier (LADSEB-CNR Padova)On Stochastic Control in FinanceIn this talk we shall review various financial applica-tions of stochastic control as well as appropriate solu-tion methodologies. These methodologies will further-more be discussed in comparison with one another.
9:00-10:00 Room : 136 Invited Talk
Matthias Heinkenschloss (Rice University)Domain Decomposition Approaches for theOptimization of Distributed SystemsOptimization of distributed systems in the context ofparameter estimation, optimal control, or optimal de-sign plays an important role in science and engineer-ing. These optimization problems pose several compu-tational difficulties arising, among other things, fromthe large number of variables and the conditioning ofsubproblems. Domain decomposition (DD) can be ap-plied at different levels (formulation of the distributedoptimization problem, solution of optimization sub-problems, and computation of PDE solutions) to de-sign efficient optimization algorithms for distributedsystems. In this talk we study several DD approaches,discuss relations among them, and present applica-tions to selected problems.
Morning:
Room: 102, Session: THA1Chair: Mark AlberTitle: Complex Networks and Biological Appli-cations 1
10:30-11:10 The Spread of Infections on SocialNetworks,Mark Newman (University of Michigan)One of the primary motivations for the study of so-cial networks has been the role they play in the spreadof infection. In this talk I will describe some recentwork on the modeling of epidemic disease on net-works. Among other things, I will discuss what weknow about the structure of actual contact networksand describe some exact solutions we have found ofepidemic models on networks of various kinds.
11:10-11:50 Information Theory Aspects of Sig-nal Transduction and Gene Regulation,Andrea Levchenko (Johns Hopkins University)Intracellular signal transduction is the process oftransmission and processing of information suppliedby the state of the medium surrounding a cell or
directly by the neighboring cells. Recent progressin genetics, recombinant DNA technology and singlemolecule imaging has resulted in elucidation of thestructure of signaling pathways and regulatory mech-anisms used in gene expression. Biochemically basedmathematical and computational models are becom-ing a common useful tool in understanding the sys-temic control characteristics of the coupled signalingand gene regulation networks. However, no attempthas been made so far to develop a description suitablefor using the concepts of Shannon’s information the-ory and to utilize this description of signaling eventsto follow the information flow. Here I will proposea way, in which a representation of information flowcan be established and used in two well-defined biolog-ical settings involving regulation of gene expression instress response and development. Implications of thisanalysis for a conceptually different understanding ofbiological regulation will be discussed.
Room: 126, Session: THA2Chair: Ruth Curtain, Olof StaffansTitle: Distributed Parameter Systems: TheoryPart I
10:30-10:50 Some Results on the Theory of Lin-ear Time-Invariant Dissipative Systems withHilbert and Pontryagin State Spaces,Damir Arov(South Ukranian Pedagogical University)New results on the similiraty of dissipative linear time-invariant systems and main operators of the systemswith Hilbert and Pontryagin state spaces will pre-sented.They retate to the systems with transfer func-tions of generalized Schur, Caratheodory and Potafovclasses
10:55-11:15 Explicit Formulae for J-SpectralFactors for Well-Posed Systems,Ruth Curtain (University of Groningen),Amol J. Sasane (University of Twente)The standard way to obtain explicit formulas for spec-tral factorization problems for rational transfer func-tions is to use a minimal realization and then obtainformulae in terms of the generators A, B, C and D.It is only possible to extend this approach to spe-cial classes of infinite-dimensional systems. For theclass of well-posed linear systems for which zero is inthe resolvent set of A we suggest another approach.There are nice connections between well-posed linearsystems and their reciprocal systems which allow oneto translate a factorization problem for the well-posedlinear system into one for its reciprocal system, thelatter having bounded generating operators. We illus-

MTNS – 2002 74
trate this general approach by giving explicit solutionsto the sub-optimal Nehari problem.
11:20-11:40 A Riccati Equation Approach tothe Standard Infinite-Dimensional H-InfinityProblem,Kalle M. Mikkola (Helsinki University of Technology),Olof Staffans (Abo Akademi University)We study the standard (four-block) H-infinity prob-lem in the infinite-dimensional setting of regular well-posed linear systems, and show that the standardcharacterizations of the solvability of this problem interms of either two independent Riccati equations anda spectral radius condition or two nested Riccati equa-tions are valid. We are also able to parameterize theset of all suboptimal solutions in the standard way.The exact formulation varies depending on the regu-larity assumptions that we make. Pure delays in theimpulse response are permitted in the most generalversion, but these lead to certain correction terms inthe Riccati equations.
11:45-12:05 Sub-optimal Hankel Norm Approx-imation for the Wiener Class,Orest Iftime, Amol Sasane(University of Twente)For the Wiener class of matrix-valued functions we ob-tain a simple frequency domain solution for the sub-optimal Hankel norm approximation problem. Theapproach is via J-spectral factorization.
12:10-12:30 LQG Balancing in Infinite Dimen-sions,Mark R. Opmeer, Ruth Curtain(University of Groningen)Balanced realizations of a linear system are those forwhich the observability and controllability gramiansare both equal and diagonal. Truncated balancedrealizations have good approximation properties andare often used for controller design. Of course, bal-anced realizations only exist for stable transfer func-tions and it has been proposed that LQG-balancedrealizations could prove a useful alternative. LQG-balanced realizations of a system are those for whichthe solutions of the associated control and filter Ric-cati equations are equal. While there exists a com-plete theory of balanced realizations (and truncations) for infinite-dimensional systems, the theory for theLQG versions has yet to be developed. In this pa-per we solve this problem for discrete-time infinite-dimensional systems.
Room: 129, Session: THA3Chair: J.M. (Hans) SchumacherTitle: Systems and Control Theory in Financeand Insurance 1
10:30-11:30 Control and Financial Engineering,J. M. (Hans) Schumacher (Tilburg University)The paper provides a review of the basics of financialengineering, with a few examples. We emphasize con-nections with control theory in a broad sense ratherthan with stochastic control theory in particular, andthe reader is not assumed to be versed in stochasticprocesses. Two brief case studies are presented: theconstruction of an indexed bond, and the hedging oflong-term contracts for delivery of oil.
11:30-12:00 Dynamic Risk Sensitive Asset Man-agement With Nonnegative Multiple FactorConstraints,Arunabha Bagchi (University of Twente),K. Suresh Kumar (University of Pennsylvania)We study the dynamic asset allocation problem withnonnegativity constraints on the economic factors.We first convert the dynamic asset allocation probleminto an equivalent stochastic differential game. Wethen impose nonnegativity constraints on the gameproblem. We then solve this new problem using somerecent results on such constrained differential games.For multifactor constraints, existence of solution ofthe resulting HJB-equation is analysed in detail.
12:00-12:30 A Filtered No-arbitrage Model forTerm Structures from Noisy Data,Andrea Gombani (LADSEB-CNR),Stefan R. Jaschke (Weierstrass-Institut, Berlin),Wolfgang J. Runggaldier (University of Padova)We consider the problem of pricing in financial mar-kets when agents do not have access to full informa-tion. The particular problem concerns the pricing ofnon traded or illiquid bonds on the basis of the obser-vations of the yields of traded zero-coupon bonds. Theapproach being used gives an example of how stochas-tic filtering techniques, in particular the Kalman filter,can be usefully applied to pricing under incompleteinformation.
Room: 136, Session: THA4Chair: David NichollsTitle: Fully Nonlinear, Three-Dimensional,Surface Water Waves in Arbitrary Depth
10:30-11:00 Experiments on Deep-Water Waveswith Two-Dimensional Surface Patterns,Diane Henderson (Penn State)

MTNS – 2002 75
Experiments are conducted in a three-dimensionalwave basin with a wavemaker system comprising 32side-by-side paddles for which there is precise control.Two types of wavemaker forcings are used to createtwo-dimensional surface patterns: (1) two symmetriccarrier waves interacting at an oblique angle and (2)a single carrier wave propagating in the x-directionwith a Jacobi elliptic, sn-function modulation in they-direction. Data are presented from overhead pho-tographs and from time series obtained by traversinga wave-gage through the patterns. Two parametersare systematically varied: the horizontal aspect ratioof the cells comprising the surface pattern and themeasure of nonlinearity of the input wavefield.
11:00-11:30 Instability of Bounded Solutions ofthe 2-D Cubic Nonlinear Schrodinger Equa-tion,John Carter (Seattle University)In 1974, Zakharov and Rubenchik established that thesoliton solutions of the two-dimensional cubic nonlin-ear Schrodinger equation (NLSE) are unstable withrespect to long-wave transverse perturbations. We es-tablish that all bounded solutions of the NLSE areunstable with respect to long-wave transverse pertur-bations. All possible sign choices in the NLSE areconsidered, though we focus on the NLSE as a modelof waves on deep water.
11:30-12:00 Computing (quasi) Periodic Wavesin Shallow Water,Bernard Deconinck (Colorado State University)The Kadomtsev-Petviashvili (KP) equation governsthe evolution of waves in shallow water. It has a fam-ily of (quasi) periodic solutions which are implicitlyparametrized by compact, connected Riemann sur-faces. This presents a large obstacle for the use ofthese solutions. I will discuss black box implementa-tions aimed at making the computation of these solu-tions effective.
12:30-13:00 Mathematical Models of Deep-Water Waves with two-Dimensional SurfacePatterns,Harvey Segur, (U. of Colorado)Another speaker in this session presents intrigu-ing experiments on waves in deep water, with two-dimensional surface patterns that are either periodicor nearly so. These wave patterns persist for relativelylong times in the experiments. This talk presentspreliminary attempts to find a suitable mathematicalmodel for these observed waves.
Room: 208, Session: THA5
Chair: Krzystof Galkowski, Eric Rogers, Victor Vin-nikovTitle: Multidimensional Systems 5
10:30-11:00 Robust Stability and Stabilization ofn-D Systems,Jiang-Qian Ying (Gifu University, Japan),Li Xu (Akita Prefectural University, Japan),Masayuki Kawamata (Tohoku University, Japan)The stability margin and stabilizability margin of n-Dsystems are first considered. The stabilizability mar-gin is defined for the first time to be the largest sta-bility margin that a closed-loop feedback system canreach. A general computational algebraic procedure isthen proposed for both computation of the stability/stabilizability margins and construction of a stabiliz-ing compensator which can reach the stabilizabilitymargin as close as desirable.
11:00-11:30 Succesive stabilization of a class of2D systems,Krzysztof Galkowski, Bartek Sulikowski(University of Zielona Gora),Eric Rogers (University of Southampton),David H. Owens (University of Sheffield)The subject area of this paper is the application of sys-tems theory developed for linear repetitive processes,a distinct class of 2D linear systems, to linear itera-tive learning control schemes. A unique feature is theinclusion of experimental results obtained from theapplication of control laws designed using this theoryto an experimental rig in the form of a chain conveyorsystem.
11:30-12:00 Optimal Control for a Class of Dif-ferential Linear Repetitive Processes,Eric Rogers (University of Southampton),S. Dymkou (Ballarat University, Australia),M. Dymkov (National Academy of Sciences of Be-larus, Minsk),K. Galkowski (University of Zielona Gora),D. H Owens (University of Sheffield)Differential repetitive processes are a class ofcontinuous-discrete 2D linear systems of both systemstheoretic and applications interest. The feature whichmakes them distinct from other classes of such sys-tems is the fact that information propagation in oneof the two independent directions only occurs over afinite interval. In this paper, we develop new resultson optimal and sub-optimal control of an importantsub-class of these processes.

MTNS – 2002 76
12:00-12:30 Relation between Eigenvalues andSingular Values in the Problem of StabilityMaintenance of Ellipsoidal Estimates,Taalaibek A. Akunov, Anatoly V. Ushakov(Technical University, St. Petersburg, Russia)Problem of defining of relation between eigenvaluesand singular values of matrix and matrix-valued func-tions of the matrix is considered. The problem arisesat the interfaces between methods of systems synthe-sis with use of generalized modal control and qualityevaluation of these systems with the help of ellipsoidalquality estimates. Solution is oriented on maintenanceof stability of ellipsoidal quality estimates by meansof stabilisation of state matrix eigenvalues and eigen-vectors.
Room: 209, Session: THA6
Chair: Koichi HashimotoTitle: Globally Stable Robust Visual Servoing
10:30-11:00 Keeping Features in the Camera’sField of View: a Visual Servoing Strategy,K. Hashimoto ( University of Tokyo),Graziano Chesi, D. Prattichizzo, A. Vicino(University of Siena)A new visual servoing strategy ensuring global con-vergence and all points in the field of view without re-quiring any knowledge on the 3D model of the scene isproposed. Moreover, the camera trajectory length isminimized in the rotational space and, for some cases,also minimized in the translational space. Robustnessagainst uncertainties on the camera intrinsic parame-ters and optical axis direction is also guaranteed.
11:00-11:30 Binocular Visual Servoing with aLimited Field of View,Noah Cowan (University of California at Berkeley)This paper presents a simple, globally conver-gent, binocular image-based visual servoing algorithmwhich accounts for the limited field-of-view of a CCDcamera system. Recourse to Navigation Functions, arefined notion of artificial potential functions, leadsto controllers for first order, quasi-static as well assecond order, dynamic plants. Underlying these con-structions is a global account of the transformationbetween the task and image space.
11:30-12:00 Visual Servoing with Dynamics:Control of an Unmanned Blimp,Jim Ostrowski (University of Pennsylvania)No Abstract
12:00-12:30 Enlarging the Stable Region of Im-age Based Control by Path Planning,Youcef Mezouar (Columbia University)No Abstract
Room: 210, Session: THA7Chair: Bill Helton, Andre Ran, Leiba RodmanTitle: Matrix and Operator Equations II
10:30-11:00 Noncommutative Convexity ofFunctions and Sets,J. William Helton (University of California, SanDiego)The type of convexity one sees in many linear sys-tems applications is ”matrix convexity”. Namely, onehas a noncommutative rational function and requiresit be ”convex” when matrices are plugged in. Thetalk concerns work with Scott McCullough charac-terizing such functions and also characterizing those”noncommutative regions” which can be representedwith Linear functions (LMI). The tools include a newnoncommutative Positivestellensatz.
11:00-11:30 Symmetry Groups, SemidefiniteProgramming,and Sums of Squares,Pablo A. Parrilo (ETH)No Abstract
11:30-12:00 The Symmetric Linear Matrix Equa-tion,Martine C. B. Reurings(Vrije Universiteit, Amsterdam)In this talk the matrix equation X + A∗1XA1 + · · ·+A∗mXAm = Q is considered, where Q is positive defi-nite and the Aj , j = 1, . . . ,m are arbitrary matrices.For m = 1 the equation becomes X + A∗1XA1 = Q.Note the difference with the Stein equation. It isknown that the equation for m = 1 has a unique pos-itive definite solution if A∗1QA1 < Q . In the generalcase a similar condition is sufficient for the existence ofa unique positive definite solution, but we cannot usethe same techniques as were used in the case m = 1.Our proof depends on the notion of the Kroneckerproduct of two matrices.
12:00-12:30 Investigating Duality on StabilityConditions,Mauricio de Oliveira (UNICAMP)This paper is devoted to investigate the role playedby duality in stability analysis of linear time-invariantsystems. We seek for a dual statement of a re-cently developed method for generating stability con-ditions, which combines Lyapunov stability theory

MTNS – 2002 77
with Finsler’s Lemma. This method, developed inthe time domain, is able to generate a set of (primal)equivalent stability tests involving extra multipliers.The resulting tests have very attractive properties.Stability is characterized via Linear Matrix Inequali-ties and we use optimization theory to obtain the du-als. The dual problems are given a frequency domaininterpretation.
Middle:
Room: 102, Session: THM1Chair: Mark AlberTitle: Complex Networks and Biological Appli-cations 2
14:00-14:40 Synchronization of Oscillators inSmall World Systems,Lou Pecora (Naval Research Laboratory)Smallworld networks are regular lattices of connectednodes to which random connections have been added.Recently, Watts and Strogatz showed that only a fewrandom, long-range connections are necessary to cre-ate paths that are very short even between diametri-cally opposed nodes. An interesting question regard-ing smallworld systems is, how do such added, ran-dom connections affect dynamics on the lattice if thenodes are oscillators? In particular, is the intuitiveview that additional connections, even random ones,would help stabilize a synchronous state correct? Weshow that we can use the recently formulated mas-ter stability approach to synchronization stability toprobe synchronization in smallworld systems in a di-rect and generic way. The results are often not whatone expects. In some cases added connections canboth help and hurt synchronization. The oppositecase of the saturated world is equally interesting andargues for a symmetry-breaking approach to study ef!fects at both ends of the connection distribution. Wealso compare the results for smallworld, random net-works to highly regular networks/graphs. The small-world networks do as well as the best regular networks.
14:40-15:20 Intracellular Signaling is Dependenton the Cytoskeleton.,Gabor Forgas (University of Missouri Columbia)No Abstract
15:20-16:00 The Role of Scale-free ConnectivityPatterns in Spreading Phenomena,Alessandro Vespignani (ICTP)We show that the large connectivity fluctuations usu-ally found in scale-free networks strengthen consider-ably the incidence of epidemic outbreaks. Scale-free
networks, which are characterized by diverging con-nectivity fluctuations, exhibit the lack of an epidemicthreshold and always show a finite fraction of infectedindividuals. This particular weakness is found also inimmunization strategies that can be successfully de-veloped only by taking into account the connectivitypatterns of scale-free networks. The understandingof epidemics in scale-free networks might deliver newinsights in the spread of information and diseases inbiological and technological networks that often ap-pear to be characterized by complex heterogeneousarchitectures.
Room: 126, Session: THM2Chair: Ruth Curtain, Olof StaffansTitle: Distributed Parameter Systems: TheoryPart II
14:00-14:30 Zeros of SISO Infinite-DimensionalSystems,Kirsten Morris (University of Waterloo),Richard Rebarber (University of Nebraska)We define the zeros of SISO infinite-dimensional sys-tems with bounded control and observation operatorsB and C respectively in terms of the spectrum of anoperator on an invariant subspace. If the range(B) isnot in ker(C), we calculate the operator K such thatthe spectrum of A+BK on ker(C) is the system ze-ros. Also, A+BK generates a semigroup on ker(C). Ifthe range(B) is in ker(C), a number of situations mayoccur, depending on the nature of B and C.
14:30-15:00 Stabilizability of Systems with Sig-nals in `2(Z),Birgit Jacob (University of Dortmund)We consider a system as a (possibly unbounded) lin-ear operator from `2(Z) to `2(Z). In this setup even asimple causal convolution system is not stabilizable isthe usual sense of the term. We discuss this problem,and we “solve” the problem by adapting the definitionof stabilizability. Finally, we compare the obtainedcontroller with the one we obtain by restricting oursystem to `2(N0).
15:00-15:30 Stability and Boundedness of Con-tinuous and Discrete-Time Systems,Hans Zwart, B.Z. Guo(University of Twente)We investigate the relation between discrete and con-tinuous systems on a Hilbert space. More precisely, weinvestigate the stability properties of the semigroupgenerated by the operator A, and the sequence And ,where n is a positive integer, and A and Ad are re-lated via Ad = (I + A)(I − A)−1, or equivalently

MTNS – 2002 78
A = (Ad−I)(Ad+I)−1. One of our result states thatif A and its inverse generate a bounded semigroup,then And is uniformly bounded.
15:30-16:00 Coprimeness Conditions for Pseudo-rational Transfer Functions,Yutaka Yamamoto (Kyoto University)This paper surveys and discusses some coprimeness is-sues for the class of pseudorational transfer functions.They are effective in capturing various system prop-erties for systems with bounded-time memory, e.g.,delay systems. Various notions of coprimeness areknown to be non-equivalent. We show, however, thatunder some conditions spectral coprimeness impliesexact coprimeness (existence of Bezout identity).
Room: 129, Session: THM3Chair: J.M. (Hans) SchumacherTitle: Systems and Control Theory in Financeand Insurance 2
14:00-15:00 Ruin Probabilities Minimization andDividend Distribution Optimization in Diffu-sion Models,Michael TaksarThis will serve as an introduction to the stochasticcontrol models in insurance. We will consider a modelof an insurance company which has different modes ofrisk and financial control. Different types of reinsur-ance correspond are the risk reduction techniques ofthe insurance, while financial control is a more famil-iar portfolio rebalancing. There are different objec-tives which the company pursues. One is the classi-cal minimization of ruin probabilities. Another oneis dividend pay-out maximization. The latter mergeswith the classical finance issue of a small investor pi-oneered by Merton. Diffusion approximation enablesone to get a closed form solution to many problemsand see early the structure of the optimal policy.
15:00-15:30 Continuous-Time Mean-VariancePortfolio Selection with Markov-ModulatedMarket Parameters,Xun Yu Zhou (Chinese University Hong KongNo Abstract
15:30-16:00 Stock Selection Based on Clusterand Outlier Analysis,Steven Craighead, Bruce Klemesrud(Nationwide Financial, Columbus, Ohio)In this paper, we study the selection and active trad-ing of stocks by the use of a clustering algorithm andtime series outlier analysis. The Partitioning Among
Mediods (PAM) clustering algorithm of Kaufman andRousseeuw(1990) is used to restrict the initial set ofstocks. We find that PAM is effective in its ability tospecify nonuniform stock series from the entire uni-verse. We are pleasantly surprised that the algorithmeliminated the bankrupt Enron and Federal Mogulstock series, without our intervention. We use outlieranalysis to define two separate active trading strate-gies. The outliers within a time series are determinedby the use of a Kalman Filter/Smoother model devel-oped by de Jong and Penzer(1998). Weekly trading instocks with an initial $30,000 with a closed stock port-folio from 1993 to 2001, we obtained a 17.8% annualreturn on a cash surrogate passive strategy, 18.1% on apassive strategy using all the stocks in our restrictedasset universe, 20.2% on a combined cash protectedand outlier active strategy, and 23.3% using the out-lier active strategy only. Comparing these results tothe passive strategy being entirely invested in the S&P500 Large Cap index with at 9.9% return, we find thatunder this stock portfolio any of our strategies are su-perior to that of a purely passive index strategy.
Room: 136, Session: THM4Chair: Paul Van DoorenTitle: Robust Control and Linear Matrix In-equalities
14:00-14:30 Linear Matrix Inequalities in RobustControl: A Brief Survey,Venkataramanan Balakrishnan (Purdue University)Control system models must often explicitly incorpo-rate in them uncertainties or perturbations. Robustcontrol deals with the analysis of and design for suchuncertain control system models. This paper providesa brief survey to some robust control techniques thatare based on numerical convex optimization over Lin-ear Matrix Inequalities (LMIs).
14:30-15:00 Periodic Multirate Systems, nu-Gapand Robust Stabilization,Li Qiu, Li Chai(Hong Kong University of Science & Technology)A new discription of multirate systems, called mul-tirate periodic system, is given using the concept ofperiodic time-varying input-output spaces. We thendefine the ν-gap metric of two multirate periodic sys-tems and study the robust stabilization with this met-ric. The optimal robust stabilization margin is explic-itly computed and an obsever-form suboptimal con-troller is given. The solution amounts to solving twodiscrete-time algebraic Riccati equations and an ex-tended Parrot problem.

MTNS – 2002 79
15:00-15:30 Spectral Factorization and Sums ofSquares via Semidefinite Programming,Hugo Woerdeman (College of William and Mary)It is known that a matrix (trigonometric) polynomialthat is nonnegative definite on the real axis (on theunit circle) allows an outer factorization. In this pa-per we investigate the different possibilities how theouter factor may be determined via semidefinite pro-gramming. In the dual formulation this leads to aquestion what possible barrier functions there exist forclasses of positive semidefinite structured block ma-trices. The multivariable version, i.e., finding sums ofsquares representations, is also explored. Appropriatedefinitions for outer in this context also come to pass.
15:30-16:00 Robustness Analysis via StabilityRadii, Spectral Value Sets and mu-Functions,Michael Karow (Technical University of Berlin)This is an introductory talk on robustness problemsconcerning the stability of uncertain finite dimen-sional linear systems. Our tools are stability radii,spectral value sets (pseudospectra) and µ-function forstructured matrix perturbations. We discuss the re-lationship between these quantities and give explicitformulas for several perturbation structures. In par-ticular, we regard real perturbations and pseudospec-tra of composite systems.
Room: 208, Session: THM5Chair: Maria Elena ValcherTitle: The Behavioral Approach to DynamicSystems
14:00-14:30 Deterministic Kalman Filtering,Jan C. Willems (University of Leuven, Belgium)A deterministic interpretation of the Kalman filter-ing formulas is given, using the principle of leastsquares estimation. The observed signal and the to-be-estimated signal are modeled as being generated asoutputs of a finite-dimensional linear system driven byan input disturbance. Postulating that the observedsignal is generated by the input disturbance that hasminimal least squares norm leads to a method of com-puting an estimate of the to-be-estimated output.
14:30-15:00 Over-Determined Systems,Eva Zerz (University of Kaiserslautern)Over-determined systems are a special type of au-tonomous systems. They are algebraically character-ized by kernel representation matrices that are minorright prime. The systems theoretic significance of thenotion is closely related to the extension problem, anover-determined boundary value problem in which thevalues of the desired function are prescribed in a whole
neighborhood of the boundary.
15:00-15:30 Regular Implementability nD Be-haviors,Paula Rocha (University of Aveiro, Portugal)We consider the problem of implementability and reg-ular implementability of a nD behavior by intercon-nection through a control variable. In the 1D case,the second property is equivalent to the regular im-plementability of the desired system variable behaviorby full interconnection. A similar result is not valid inthe nD case. However we obtain an alternative char-acterization in terms of the regular implementabilityof a suitable control variable behavior.
15:30-16:00 Cones of Trajectories as Subsets ofLinear Systems: the Autonomous Case,Andrea Morettin (Universita di Padova)In most pratical applications the designer has to facephysical and technological constraints that lead to aset of inequalities involving the variables of the model.In order to provide a formal framework for dealingwith this situation, we introduce the concept of coni-cal behaviour as a time-invariant cone of real trajec-tories which is complete. We describe such a set inrelation with the minimal vector space that containsit. In particular, we afford this problem by assumingthat the conical behaviour is autonomous, i.e. a tra-jectory note in finite time window is totally defined.If a conical behaviour is polyhedral it admits a non-negative state representation. In a dual look a conicalbehaviour may be the set of trajectories which satis-fies a model of a finite number of inequality constraintsthat act on a finite time window of the trajectory it-self.
Room: 209, Session: THM6Chair: Naomi LeonardTitle: Control and Dynamics of Mechanical Sys-tems I
14:00-14:20 Composition of Dirac Structuresand Control of Port-Hamiltonian Systems,Arjan van der Schaft (University of Twente),J. Cervera (Universidad de Murcia, Spain)Key feature of Dirac structures (as opposed to Poissonor symplectic structures) is the fact that the compo-sition of Dirac structures again defines a Dirac struc-ture. This implies that any power-conserving inter-connection of port-Hamiltonian systems is a port-Hamiltonian system itself. Furthermore, the com-posed Dirac structure determines the closed-loop al-gebraic constraints, as well as its Casimir functions.In this paper the set of achievable composed Dirac

MTNS – 2002 80
structures for a given plant port-Hamiltonian systemis characterized.
14:20-14:40 Hamiltonian Attitude Dynamics fora Spacecraft with a Point Mass Oscillator,Craig Woolsey (Virginia Tech)Two noncanonical Hamiltonian models are presentedfor the dynamics of a rigid body with an constrainedmoving point mass. One of these models is used toanalyze stability of steady principal axis rotation of arigid body with a spring-mass oscillator. The analysisgives necessary and sufficient conditions for stabilityof steady major axis rotation, as well as sufficient con-ditions for instability of intermediate and minor axisrotation.
14:40-15:00 Controllable Kinematic Reductionsfor Mechanical Systems: Concepts, Computa-tional Tools, and Examples,Andrew Lewis (Queen’s University),Francesco Bullo (University of Illinois at Urbana-Champaign),Kevin M. Lynch (Northwestern University)This paper introduces the novel notion of kinematicreductions for mechanical systems and studies theircontrollability properties. We focus on the class ofsimple mechanical control systems with constraintsand model them as affine connection control systems.We present a comprehensive treatment of local con-trollability properties of mechanical systems and theirkinematic reductions.
15:00-15:20 Matching and Stabilization of LinearMechanical Systems,Dimitri Zenkov (North Carolina State University)We consider linear controlled mechanical systemsand show that controllability enables one to use themethod of controlled Lagrangians for feedback stabi-lization of equilibria.
15:20-15:40 Matching and Stabilization of Con-strained Systems,Guido Blankenstein (EPFL)In this paper we discuss the stabilization by meansof structure preserving feedback laws (i.e., match-ing) of constrained systems described as implicit port-controlled Hamiltonian systems. The theory is ap-plied to underactuated mechanical systems with kine-matic constraints.
15:40-16:00 Extremal Flows on Stiefel Mani-folds, and Riemannian Potatoes,Peter Crouch (ASU),Anthony M. Bloch (University of Michigan)In this paper, we consider an optimal control prob-lem, or constrained variational problem, that evolveson a general Stiefel Manifold, posed in both continu-ous and discrete time. At one extreme this problemyields a symmetric realization of the generalized rigidbody system, and at the other extreme reduces to thegeodesic flow on an ellipsoid. We work out the Hamil-tonian structure of the general extremal flow using theoptimal control formalism revealing its complexity.
Room: 210, Session: THM7Chair: Jan van SchuppenTitle: Control and Algebra
14:00-14:30 Control and Algebra - An Introduc-tion,Jan H. van Schuppen (CWI, Amsterdam)The concept of bisimulation has been developed incomputer science by R. Milner for the study of equiv-alences of transition systems. It has been generalizedto coalgebra and to category theory. In control andsystem theory the concept of bisimulation is useful forthe study of relations of dynamic systems, in particu-lar of observationally equivalent systems. This shortpaper is an introduction to the session ‘Control andAlgebra’.
14:30-15:00 Towards an Algebraic Systems The-ory of Hybrid Systems,George J. Pappas (University of Pennsylvania)The fundamental notion of bisimulation has inspiredvarious notions of system equivalences in concurrencytheory. Many notions of bisimulation for various dis-crete systems have been recently unified in the ab-stract category theoretical formulation of bisimula-tion due to Joyal, Nielsen and Winskel. In this pa-per, we adopt their framework and unify the notionsof bisimulation equivalences for discrete, continuousdynamical and control systems. This shows that ourequivalence notion is on the right track, but also con-firms that abstract bisimulation is general enough tocapture equivalence notions in the domain of contin-uous systems. We believe that the unification of thebisimulation relation for labelled transition systemsand dynamical systems under the umbrella of abstractbisimulation, as achieved in this work, is a first steptowards a unified approach to modeling of and rea-soning about the dynamics of discrete and continuousstructures in computer science and control theory.

MTNS – 2002 81
15:00-15:30 The Category of a Affine ConnectionControl Systems,Andrew Lewis (Queen’s University)The category of affine connection control systems isone whose objects are control affine systems whosedrift vector field is the geodesic spray of an affine con-nection, and whose control vector fields are verticallifts to the tangent bundle of vector fields on configu-ration space. This class of system includes a large andimportant collection of mechanical systems. The mor-phisms (feedback transformations) in this category areinvestigated.
15:30-16:00 Coalgebra and Supervisory Controlwith Partial Observations,Jan Komenda (CWI, Amsterdam)Coalgebraic techniques are applied to the supervisorycontrol of discrete-event systems with partial obser-vations. Classical notions from concurrency theoryare specialized to control theory.The concept of weaktransitions enables the relational characterization ofobservability and gives rise to a coalgebraic formula-tion of the necessary and sufficient conditions for theexistence of a supervisory control which achieves aconsidered legal language.
Afternoon:
Room: 102, Session: THP1Chair: Mark AlberTitle: Complex Networks and Biological Appli-cations 3
16:30-17:00 Connections Matter: A BooleanModel for the Segment Polarity Network ofDrosophila Melanogaster,Reka Albert (University of Minnesota)The Drosophila segment polarity genes form acomplex network of cross-regulatory interactions.Through the functioning of this network the initialexpression of the segment polarity genes is stabilizedand maintained throughout several stages of embry-onic development including two rounds of cell divi-sions. In this talk I propose a Boolean representationof this network that assumes that genes and proteinsare either ON or OFF, and their interactions can beformulated as logical functions. This model is deeplyrooted in the topology of the segment polarity net-work, while it disregards the biochemical details ofthe interactions. The model is able to reproduce thewild type expression pattern of the segment polaritygenes, as well as the ectopic expressions obtained forgene mutation experiments. In addition, the Booleanrepresentation allows for a more complete analysis ofthe possible steady states as experiments, and for a
better identification of the initial conditions that leadto certain steady states. I propose this type of analysisas a first, qualitative step in understanding complexnetworks. The success of a Boolean representation ofa network strongly suggests that the topology of thenetwork is correctly taken into account, and a morequantitative approach can be used.
17:00-17:30 Modeling Mesenchymal Condensa-tion during Limb Chondrogenesis,Gilberto Tomas (University of Notre Dame)We study a quasi-2D micromass cell culture of chicklimb-bud cells which undergoes chondrogenesis thatqualitatively resembles chondrogenesis in vivo. Dis-associated mesenchymal cells, after plating at highdensity, form local condensations, which then differ-entiate into cartilage. A similar process in the intactembryonic limb leads to the formation of skeletal pri-mordia. Among several possible underlying mecha-nisms of mesenchymal condensation, we concentrateon local cell-cell adhesion and cell-extracellular ma-trix interaction and propose a stochastic pattern for-mation mechanism for cell clustering. We implementa 2D extended Potts Model simulation and we discusshow this mechanism could be an important part ofmesenchymal condensation in limb chondrogenesis invitro and in vivo.
17:30-18:00 Classification of scale-free networks,Byungnam Kahng (Seoul National University)While the emergence of a power law degree distribu-tion in complex networks is intriguing, the degree ex-ponent is not universal. Here we show that the be-tweenness centrality displays a power law distribu-tion with an exponent η which is robust and use itto classify the scale-free networks. We have observedtwo universality classes with η ≈ 2.2 and 2.0, respec-tively. Real world networks for the former are the pro-tein interaction networks, the metabolic networks foreukaryotes and bacteria, and the co-authorship net-work, and those for the latter one are the Internet,the world-wide web, and the metabolic networks forarchaea. Distinct features of the mass-distance rela-tion, generic topology of geodesics and resilience un-der attack of the two classes are identified. Variousmodel networks also belong to either of the two.
18:00-18:30 Prediction of Protein EssentialityBased on Genomic Data,Hawoong Jeoong (Korea Advanced Inst. of Scienceand Technology Taejon),Zoltan N. Oltvai (Northwestern University MedicalSchool)Albert-Laszlo Barabasi (University of Notre Dame)

MTNS – 2002 82
A major goal of pharmaceutical bioinformatics is todevelop computational tools for systematic in silicomolecular target identification. Here we demonstratethat in the yeast, Sacharomyces cerevisiae, the pheno-typic effect of single gene deletions simultaneously cor-relate with fluctuations in mRNA expression profiles,the functional categorization of the gene products,and their connectivity in the yeast’s protein-proteininteraction network. Building on these quantitativecorrelations we developed a computational method forpredicting the phenotypic effect of a given genes func-tional disabling or removal. Our subsequent analyseswere in good agreement with the results of system-atic gene deletion experiments, allowing us to predictthe deletion phenotype of a number of untested yeastgenes. The results underscore the utility of large ge-nomic databases for in silico systematic drug targetidentification in the postgenomic era.
Room: 126, Session: THP2
Chair: Kirsten Morris, Olof StaffansTitle: Distributed Parameter Systems: Stabi-lization and Control, Part I
16:30-17:00 Reciprocals of Regular Linear Sys-tems: a Survey.,Ruth Curtain (University of Groningen)This paper proposes a novel approach to studying reg-ular linear systems via their reciprocal systems. Un-der the generic assumption that A has a boundedinverse, a regular linear system possesses a recipro-cal system with four bounded generating operators.Many system theoretic problems for regular linear sys-tems can be translated into equivalent problems fortheir reciprocal system. Due to the bounded nature ofthe generators, the problems for the reciprocal systemare easier to solve and these solutions can be trans-lated back to solutions for the original regular linearsystem. Properties of reciprocal systems are reviewedand the success of this approach is illustrated with theLQ control problem and the existence of (pseudo-) co-prime factorizations. Another very successful applica-tion of reciprocal systems is to obtain explicit formu-las for solutions to spectral factorization problems interms of the original unbounded operators A,B,C,D(see Curtain and Sasane, this conference). The re-ciprocal approach has also great potential for otherproblems for regular linear systems, for example, H-infinity control, sampling and the robust stability ra-dius. Finally, we remark that similar conclusions holdif we replace the assumption that A has a boundedinverse by the assumption that for some real numbera, aI-A does.
17:00-17:30 H-infinity Control of Acoustic Noisein a Duct with a Feedforward Configuration,Kirsten Morris (University of Waterloo)A mathematical model of sound propagation in a ductderived from physical principles is described. Exper-imental results validate the model. Theoretical lim-its of noise reduction are examined using this model.In many feedforward configurations, the optimal con-troller can reduce the noise at a point to almost zero.However, no noise reduction is obtained at points be-low the performance point, and at many such pointsthe noise level is increased.
17:30-18:00 Positivity and Dissipativity of Oscil-lating Diffusive Filters, Application to the Sta-bility of Coupled Systems,G. Dauphin, Denis Matignon(ENST/TSI & CNRS, URA 820)Oscillating diffusive filters such as Gegenbauer filtershave a slowly decreasing impulse response. They area continuous aggregation of positive oscillating filters;hence, they are positive and have a dissipative realiza-tion, which helps prove both the external and internalstabilities of some coupled systems involving a ratio-nal filter and such an oscillating diffusive filter in thefeedback loop.
18:00-18:30 Can Positive Pseudo-DifferentialOperators of Diffusive Type Help StabilizeUnstable Systems?,Denis Matignon (ENST/TSI & CNRS, URA 820)Diffusive representations of positive pseudo-differential operators can often be used in the analysisof coupled systems, in which their dissipative realiza-tion plays a major role. Now, some coupled systemsinvolving a negative PDO can still be stable. Con-versely, some unstable systems can be stabilized bypositive PDOs, thus requiring some more analyticalknowledge: such striking examples will be presented,either in continuous time or in discrete time.
Room: 129, Session: THP3Chair: Tyrone DuncanTitle: Stochastic Theory and Applications
16:30-17:00 An Approach to Stochastic Inte-gration for Fractional Brownian Motion in aHilbert Space,Tyrone Duncan, B. Pasik-Duncan,(University of Kansas)J. Jakubowski (University of Warsaw)A Hilbert-valued stochastic integration is defined foran integrator that is a cylindrical fractional Brown-ian motion in a Hilbert space. Since the integrator is

MTNS – 2002 83
not a semimartingale for the fractional Brownian mo-tions considered, a different definition of integration isrequired. Both deterministic and stochastic operator-valued integrands are used. The approach to inte-gration has an analogue with Skorokhod integrals forBrownian motion by the basic use of a derivative ofsome functionals of Brownian motion. An Ito formulais given for some processes obtained by this stochasticintegration.
7:00-17:30 A Class of Tractable Partially Ob-served Discrete Stochastic Games,William McEneaney(University of California at San Diego)Stochastic games under partial information are typi-cally computationally intractable even in the discrete-time/discrete-state case. We consider a problemwhere one player has perfect information. A chief diffi-culty is that the information state for the other playeris infinite-dimensional. However, in the problem typehere, the information state and state-feedback valuefunctions are finite-dimensional. Thus computationaltractability is greatly enhanced.
17:30-18:00 Hybrid Stock Models and Parame-ter Estimation,George Yin (Wayne State University),Q. Zhang (University of Georgia),K. Yin (University of Minnesota)In this work, we study a class of hybrid models forthe stock market to account for the coexistence ofcontinuous dynamics and discrete events. Differentfrom the original geometric Brownian motion mod-els, both the rate of return and the volatility in thehybrid model depend on a continuous-time Markovchain. This model can deal with random volatilityby incorporating market trend with other economicfactors. To use the models requires being able toestimate the values of elements of the generator ofthe underlying Markov chain. We develop a stochas-tic approximation-based algorithm for the estimationtask. The asymptotic properties including conver-gence and rates of convergence of the algorithm areproved. Using the estimated generator, one can thenproceed to make equity liquidation decisions.
18:00-18:30 Jump-Diffusion Stock Return Mod-els in Finance: Stochastic Process Density withUniform-Jump Amplitude,Floyd B. Hanson (University of Illinois at Chicago),J. J. Westman (UCLA)The stochastic analysis is presented for the parameterestimation problem for a weighted least squares fittinga theoretical jump-diffusion model to the log-returns
from closing data of the Standard and Poor’s 500(S&P500) stock index during the prior decade 1992-2001. The jump-diffusion model combines the usuallog-normal diffusion and a log-uniform jump distribu-tion. The results are applied to an optimal portfolioapplication in a computational companion paper.
Room: 136, Session: THP4Chair: Georg Heinig, Vadim OlshevskiTitle: Computational Methods for StructuredMatrices and Applications
16:30-17:00 Split Algorithms for Toeplitz andToeplitz-plus-Hankel Matrices,Georg Heinig (Kuwait University)New algorithms for Toeplitz and Toeplitz-plus-Hankelmatrices are presented that are in the spirit of thesplit algorithms of Delsarte/Genin. It is shown thatthe split algorithms are related to ZW-factorizationslike the classical algorithms are related to LU-factorizations. Special attention is paid to skewsym-metric Toeplitz, centrosymmetric, and general T+Hmatrices.
17:00-17:30 Structured LDPC Codes,Amin Shokrollahi (EPFL)No Abstract
17:30-18:00 Efficient Matrix Computations inWideband Communications,Patrick Dewilde (Delft University of Technology),Lang Tong (Cornell University)Alle-Jan van der Veen(Delft University of Technology)Modern telecommunications put increasing demandson the efficient use of bandwidth in a channel. Animportant general technique used in wideband com-munications is code division multiple access, and forlarge bandwidths, it uses a long, time-varying code toachieve the spreading. Optimal and optimally efficientsignal recovery can be achieved using modern meth-ods of time-varying system theory. A nice example ofsystem theory applied to modern communications.
18:00-18:30 Stable Factorization of Hankel andHankel-like Matrices,Vadim Olshevsky (Georgia State University),Michael StewartThis talk will outline stable Schur-type algorithms forthe factorization of Hankel and Hankel-like matrices.The algorithm factors the matrix by applying sym-plectic transformations, instead of hyperbolic trans-formations, to generators. The new algorithms can be

MTNS – 2002 84
proven to be backward stable with a particular choiceof symplectic transformations.
Room: 209, Session: THP5Chair: Naomi LeonardTitle: Control and Dynamics of Mechanical Sys-tems II
16:30-16:50 On the Ball and Beam Problem:Regulation with Guaranteed Transient Perfor-mance and Tracking Periodic Orbits,Romeo Ortega (LSS-Supelec)Fabio Gomez-Estern, Javier Aracil,Francisco Gordillo(Escuelo Superior de Ingenieros)Despite the large number of controllers presented inthe literature for the stabilization of the ball and beamsystem, only a few results are available on the tran-sient performance problem. The aim of this paperis to propose an asymptotically stabilizing controllerthat ensures that, for a well defined set of initial con-ditions, the ball remains on the bar during the tran-sient. Tuning the controller, the set can be extendedto include any initial position with zero velocity. Thecontroller is a nonlinear static state feedback that isderived using the interconnection and damping assig-ment energy-shaping controller design methodology.As an extension of the regulation problem we alsopropose in this paper a controller that forces the balland beam to oscillate. This is achieved, within theframework of energy-shaping, by assigning an energyfunction that attains its mimimum along the desiredperiodic orbit. A key step in our design is the im-mersion of the oscilator system into the fourth ordersystem dynamics.
16:50-17:10 Reduction of Controlled LagrangianSystems with Symmetries,Dong Eui Chang (Cal Tech)We extend the theory of controlled Lagrangian sys-tems to include systems with symmetry and the La-grangian reduction theory. This extension is crucialto study examples such as spacecraft control, under-water vehicle control, etc.
17:10-17:30 Constrained Mechanical Systemswith Impacts,Patrick Hagerty (University of Arizona)No Abstract
17:30-17:50 Adjoints of Hamiltonian Systemsand Iterative Learning Control,Kenji Fujimoto, Toshiharu Sugie
(Kyoto University)This paper is concerned with a study on the varia-tional systems and their adjoints of Hamiltonian con-trol systems and its application to iterative learningcontrol, which is applicable to electro-mechanical sys-tems. The proposed learning method does not requireeither the knowledge of physical parameters of the tar-get system nor the time derivatives of the output sig-nals.
17:50-18:10 Controllability of Mechanical Sys-tems with Constraints and Symmetry,Jorge Cortes (University of Twente),Sonia Martinez(Consejo Superior de Investigaciones Centificas),Jim P. Ostrowski (University ov Pennsylvania),Hong Zhang (Rowan University)We develop tools within the affine connection formal-ism for the control of underactuated mechanical sys-tems evolving on a principal fiber bundle. We presentreduced formulations of the Levi-Civita and the non-holonomic affine connections in the presence of sym-metries and nonholonomic constraints. Specializedcontrollability tests are developed, and the notion offiber configuration controllability is introduced. Theresults are illustrated in a planar blimp.
18:10-18:30 The Use of Information in SwarmMotions of Autonomous Vehicles,John Baillieul (Boston University)We discuss recent work on the distributed coordinatedcontrol of a system (swarm) of mobile robots whosemembers possess distinct for sensing their positionand environment. Analysis is carried out in which it isassumed that some of the robots have global positionknowledge (within some work domain) while otherrobots are only able to locate themselves only in alocal sense with respect to obstacles and other robots.Formation motions and leader-follower strategies arecalled for, and it is shown that care must be taken tokeep the followers from colliding with obstacles andeach other.
Room: 210, Session: THP6Chair: Jan Willem PoldermanTitle: New Approaches to Adaptive Control
16:30-16:50 Cautious Hierarchical SwitchingControl of Stochastic Linear Systems,Marco Campi (University of Brescia),Jaoa Hespanha(University of California, Santa Barbara),M. Prandini (University of Brescia)

MTNS – 2002 85
In this paper, we propose a supervisory switching logicthat takes into account the uncertainty on the esti-mated process model when performing controller se-lection. If the candidate controller set is hierarchicallystructured, the supervisor automatically selects thecontroller that appropriately compromises robustnessand performance, given the actual level of uncertaintyon the process description. Randomized algorithmsmake the approach feasible.
16:50-17:10 Strong Robustness in Multi-PhaseAdaptive Control: the Basic Scheme,Maria Cadic, Jan Willem Polderman(University of Twente)The general structure of adaptive control systemsbased on strong robustness is introduced. This adap-tive approach splits into two phases. The first phasefocuses on identification until enough information isobtained to design a controller stabilizing the actualsystem. This is achieved if the input sequence is suchthat the uncertainty on the system parameters to becontrolled decreases sufficiently fast. Then, in the sec-ond phase, emphasis is shifted to control.
17:10-17:30 Near Optimal LQR Performance forUncertain First Order Systems,Daniel Miller (University of Waterloo),Li Luo (IBM Canada Toronto Laboratory)In adaptive control, the objective is to provide stabil-ity and acceptable performance in the face of signifi-cant plant uncertainty. However, often there are largetransients in the plant output and the control signalcan become excessively large. Here we consider thefirst order case with the plant parameters restrictedto a compact set; we show how to design a (lineartime-varying) adaptive controller which provides nearoptimal LQR performance.
17:30-17:50 Self-Tuning Control for PolynomialSystems: an Algorithmic Perspective,Iven Mareels (University of Melbourne)A two stage adaptive or self-tuning control algorithmapplicable to systems described by transition mapsthat are polynomial in state, input and parametervariables is discussed. The feedback is defined onlyon the basis of past input and output measurements.In a first finite time stage the system to be controlledis identified together with its state trajectory. In asecond stage a local observer, is used in conjunctionwith a receding horizon control scheme to effectuatethe control objective. We discuss briefly the computa-tional complexity aspects of this approach to adaptiveor self-tuning control.
17:50-18:10 Geometry of Adaptive Control,Part II: Optimization and Geodesics,Felipe Pait, Diego Colon(University of Sao Paulo)Two incompatible topologies appear in the study ofadaptive systems: the graph topology in control de-sign, and the coefficient topology in system identifi-cation. Their incompatibility is manifest in the stabi-lization problem of adaptive control. We argue thatthis problem can be approached by changing the ge-ometry of the sets of control systems under consider-ation: estimating np parameters in an np-dimensionalmanifold whose points all correspond to stabilizablesystems. One way to accomplish this is using theproperties of the algebraic Riccati equation. Parame-ter estimation in such a manifold can be approachedas an optimal control problem akin to the determin-istic Kalman filter, leading to algorithms that can beused in conjunction with standard observers and con-trollers to construct stable adaptive systems.
18:10-18:30 Two Scale High Gain Adaptive Con-trol,Jan Willem Polderman (University of Twente),Iven Mareels (University of Melbourne)Simple adaptive controllers based on high gain out-put feedback suffer a lack of robustness with respect tobounded disturbances. Existing modifications achieveboundedness of all solutions but introduce solutionsthat, even in the absence disturbances, do not achieveregulation. In this paper a new modification thatachieves the desired robustness without the side-effectof undesirable solutions is proposed.
Friday August 16, 2002
8:00-9:00 Room : 101 Plenary Talk
Anthony Bloch (University of Michigan),Conservative and Dissipative Dynamics inClassical and Quantum Systems.In this talk I will discuss dissipative behavior in me-chanical systems which preserve energy. The talk willencompass both the classical and quantum domains.In the classical context I will consider Hamiltoniansystems and almost Poisson systems such as nonholo-nomic systems. I will also discuss both classical andquantum systems of oscillators interacting with fieldsand the phenomena of decoherence and dissipation inthis setting.

MTNS – 2002 86
9:00-10:00 Room : 101 Invited Talk
Raffaello D’Andrea (Cornell University),A State Space Approach to Control of SpatiallyInterconnected SystemsIn this talk a state space approach to controlling sys-tems with a highly structured interconnection topol-ogy is presented. It is shown that by capturing thesesystems as fractional transformations on temporal andspatial operators, many standard results in control –such as the bounded real lemma, H-infinity optimiza-tion, and robustness analysis – can be generalized ac-cordingly. The state space formulation yields condi-tions that can be expressed as linear matrix inequal-ities. Applications of this control design methodol-ogy to several hardware test-beds, including formationflight of autonomous vehicles, is also discussed.
9:00-10:00 Room : 102 Invited Talk
Allen Tannenbaum (Georgia Institute of Technology),Controlled Active Vision in Image GuidedSurgery and Therapy.We will describe use biomedical engineering methodsthat can be integrated into complete therapy deliverysystems. Such systems will support more effective de-livery of many image-guided procedures: biopsy, min-imally invasive surgery, and radiation therapy, amongothers. To understand the extensive role of imaging inthe therapeutic process, and to appreciate the currentusage of images before, during, and after treatment,we will focus our talk on four main components ofimage-guided therapy (IGT)and image guided surgery(IGS): localization, targeting, monitoring and con-trol. Specifically, we will describe robust algorithmsfor 1. segmentation automated methods that cre-ate patient-specific models of relevant anatomy frommulti-modal imagery. 2. registration automatedmethods that align multiple data sets with each otherand with the patient. All of the methods will be illus-trated from medical imagery from various modalitiesincluding MRI, CT, PET, and ultrasound.
9:00-10:00 Room : 126 Invited Talk
Karl Kunisch (University of Graz),From Viscoelastic Fluids to Constrained Opti-mal ControlTo solve large scale optimal control problems gov-erned by partial differential equations, efficient quan-titative and numerical techniques are required. Thisis the case, for example, for thermal control of visco-elastic fluids. We present our numerical results onthis optimal control problem, which is governed by aset of partial differential equations of formidable size.
The success for the practical realization of such op-timal control problem relies on the succinct use ofcontrol-theoretic structure as well as on efficient nu-merical techniques. We shall highlight the recedinghorizon technique as an example for the former andsemi-smooth Newton methods as an example for thelatter. Receding horizon control is well-known forsuboptimal control of ordinary differential equations.Its investigation for optimal control of infinite dimen-sional systems has only recently been initiated. Wepropose a receding horizon technique for a class ofcontrol-dissipative systems, which is applicable, forinstance, to the Navier-Stokes equations. The tech-nique will be justified by means of the system sta-bilization property. The construction is based on aproper choice of control Liapunov functions. We shallalso address the numerical treatment of control andstate constraints. While simple in structure they in-troduce non-differentiabilty into the optimal controlformulation and cause the solution to suffer a loss ofregularity. These features significantly influence nu-merical algorithms. We propose the primal-dual ac-tive set strategy as an efficient technique to incorpo-rate constraints in optimal control problems. We fur-ther establish their relationship to semi-smooth New-ton methods and analyze local as well as global con-vergence properties.
Morning:
Room: 102, Session: FA1Chair: Reinhard LaubenbacherTitle: Genetic Networks
10:30-11:00 Biochemistry by Numbers: Model-ing, Signaling and Genetic Networks,Pedro Mendes,Alberto de la Fuente, Paul Brazhnik, Stefan Hoops(Virginia Tech)Genomics has revolutionized research in biological sci-ences. We have gone from a single-molecule approachto global views of the entire cellular machinery (e.g.with microarrays). The availability of large data setscreates an opportunity to model biochemical networksusing a top-down approach, instead of the traditionalbottom-up. We describe the two approaches, theirpros and cons, and the strategies that we are devel-oping to approach this exciting problem.
11:00-11:30 Designer Gene Networks,Mads Kaern, James J. Collins(Boston University)Many fundamental cellular processes are governed bygenetic programs which employ protein-DNA interac-tions in regulating function. Owing to recent tech-

MTNS – 2002 87
nological advances, it is now possible to design syn-thetic gene regulatory networks, and the stage is setfor the notion of engineered cellular control at theDNA level. Theoretically, the biochemistry of thefeedback loops associated with protein-DNA interac-tions often leads to nonlinear equations, and the toolsof nonlinear analysis become invaluable. In this talk,we describe how techniques from nonlinear dynamicsand molecular biology can be utilized to model, designand construct synthetic gene regulatory networks. Wepresent examples in which we integrate the develop-ment of a theoretical model with the construction ofan experimental system. We also discuss the implica-tions of synthetic gene regulatory networks for genetherapy, biotechnology, biocomputing and nanotech-nology.
11:30-12:00 Function, Design, and Gene Cir-cuitry,Michael A. Savageau (University of Michigan)Mathematically Controlled Comparisons have proveduseful for the elucidation of biological function anddesign. This method will be used to characterize al-ternative patterns for the coupling of expression ingene circuits as well as the switching times of induciblegene circuits. Finally, I will show how the analysis ofgene circuits can be used to direct construction of agene circuit that will produce a circadian clock in thebacterium Escherichia coli.
12:00-12:30 Comparative analysis of mathemat-ical models of intracellular networks,Vassily Hatzimanikatis, Amit Mehra, Michael Beste(Northwestern University)Intracellular networks, such as mRNA and protein ex-pression networks, signal transduction networks, andmetabolic networks, are complex systems that involvelarge number of components and nonlinear interac-tions. Mathematical modeling and analysis has beeninvaluable in analyzing, understanding, and redesign-ing intracellular networks. There is a number of alter-native mathematical representations associated withevery intracellular network. However, the alternativerepresentations of a given network are not equivalentwith respect to their ability to capture the propertiesof the network. We will compare alternative mathe-matical representations of protein expression networkswith respect to their differences and similarities incapturing dynamic and steady state responses to en-vironmental and genetic perturbations.
Room: 126, Session: FA2Chair: Belinda King, Kirsten MorrisTitle: Distributed Parameter Systems: Stabi-lization and Control, Part II
10:30-10:50 An Example of Output Regulationfor Distributed Parameter Systems with Infi-nite Dimensional Exosystem,David Gilliam (Texas Tech University),Christopher I. Byrnes(Washington University, St. Louis),Jeff B. Hood,(North Carolina State University)Victor I. Shubov (Texas Tech University)In this short paper we present an example of the geo-metric theory of output regulation applied to solve atracking problem for a plant consisting of a boundarycontrolled distributed parameter system (heat equa-tion on a rectangle) with unbounded input and outputmaps and signal to be tracked generated by an infinitedimensional exosystem. The exosystem is neutrallystable but with an infinite (unbounded) set of eigen-values distributed along the imaginary axis. For thisreason the standard methods of analysis do not apply.
10:50-11:10 Control of Systems with InfinitelyMany Unstable Modes and Strongly Stabiliz-ing Controllers Achieving a Desired Sensitiv-ity,Suat Gumussoy, Hitay Ozbay(The Ohio State University)In this paper we consider a class of linear time in-variant systems with infinitely many unstable modes.By using the parameterization of all stabilizing con-trollers, we show that H-infinity controllers for suchsystems can be computed using the techniques de-veloped earlier for infinite dimensional plants withfinitely many unstable modes. We illustrate connec-tions between the problem solved here and an indirectmethod for strongly stabilizing H-infinity controllerdesign for systems with time delays.
11:10-11:30 Receding Horizon Control andReduced-Order Methods,Ito Kazufumi (North Carolina State University)No Abstract
11:30-11:50 Some Problems of Control for Non-linear Partial Differential Equations,David Russell (Virginia Tech)We intend in this talk to explore several problems incontrol of nonlinear partial differential equations, fore-most among which will be the problem of controllingthe transverse buckling modes of a nonlinear elasticstrip moving at constant velocity between two sets ofclamping rollers. Control is exercised by rotation of

MTNS – 2002 88
one of the roller assemblies.
11:50-12:10 Global Stabilization of Systems ofPartial Differential Equations Using Finite Di-mensional Controllers,Igor Mezic (UCSB)No Abstract
12:10-12:30 Ouput Regulation of Nonlinear Sys-tems with State Delay,Emilia Fridman (Tel Aviv University)Regulator equations are derived, which generalizeFrancis-Byrnes-Isidori equations to the case of re-tarded type nonlinear systems. It is shown that, understandard assumptions,the regulator problem is solv-able if and only if these equations are solvable. In thelinear case, the solution of these equations is reducedto linear matrix equations. An example of a delayedVan der Pol equation illustrates the efficiency of theresults.
Room: 129, Session: FA3Chair: Wolfgang KliemannTitle: Stochastic Control and Estimation
10:30-10:50 Algebraic Optimization Techniquesfor the Estimation of Zero-Beta Pricing Mod-els,Bernard Hanzon (Free University Amsterdam)In the area of quantitative financial modelling theCapital Asset Pricing Model (CAPM) and the Ar-bitrage Pricing Theory (APT) play a prominent role.In one subclass, the so-called zero-beta pricing mod-els, the least-squares and maximum likelihood estima-tion problem lead to a non-linear optimization prob-lem. Classically the non-linearity is handled by usingan iterative algorithm that tries to find the optimum,however there are apparently no guarantees that theglobal optimum is found in this way. Here we presentan algebraic solution of the problem which guaranteesthat the global optimum is found.
10:50-11:10 Trajectory Planning Under aStochastic Uncertainty,Ulf Jonsson (KTH),Clyde Martin (Texas Tech University),Yishao Zhou (Stockholm University)A trajectory planning problem for linear stochasticdifferential equations is considered in this paper. Theaim is to control the system such that the expectedvalue of the output interpolates given points at giventimes while the variance and an integral cost of thecontrol effort are minimized. The solution is obtained
by using the dynamic programming technique, whichallows for several possible generalizations that are alsoconsidered.
11:10-11:30 An Addendum to the Problem ofStochastic Observability,Vasile Dragan, Teodor Morozan(Romanian Academy, Bucharest)In this paper the problem of stochastic observabilityfor a class of linear stochastic systems subject to mul-tiplicative white noise and Markovian jumping is in-vestigated. Necessary and sufficient conditions whichguarantee the stochastic observability are given. Sev-eral examples are provided to show that stochasticobservability does not implies always, stochastic de-tectability.
11:30-11:50 Combined Optimization of Portfolioand Risk Exposure of an Insurance Company,Daniel Cajueiro, Takashi Yoneyama(Instituto Tecnologico De Aeronautica)This paper presents a model for an insurance com-pany that controls its risk and is allowed to invest ina financial market with just two assets - a risk freeasset and a stock. The new feature of this paper isto consider that the potential profit of this companydepends on the dynamical state of the economy. Theaim is to maximize the reserve of an insurance com-pany whose manager is risk averse.
11:50-12:10 On a Unitary Model for Two-TimeParameter Stationary Processes,Dan Emanuel Popovici(University of the West Timisoara)The basic problem in prediction theory is to estimatea certain, desired, behavior of the phenomenon un-der study (in our case a stationary process) using theinformation already obtained about it. In order to ac-complish this we should separate completely the de-terministic part from the part corrupted by noises.This is done via a Wold-type decomposition. In thecase of a two-time parameter stationary process wecharacterize its different parts in some certain Wold-type decompositions in terms of a unitary model givenby Berger, Coburn and Lebow for the commuting iso-metric pair associated to the process.
Room: 138, Session: FA4Chair: Patrick DewildeTitle: Stability and Numerics
10:30-10:50 Parameter Dependent ExtremalNorms for Linear Parameter Varying Systems,

MTNS – 2002 89
Fabian Wirth (University of Bremen)We study families of parameter varying linear systemswith restrictions on the derivative of the parametervariation. A method to construct exact parameter-ized Lyapunov norms for a wide class of such sys-tems is presented. This may be used to derive (locallyLipschitz) continuous dependence of the exponentialgrowth rate on the systems data. Furthermore, themaximal exponential growth rate may be approxi-mated using only periodic parameter variations.
10:50-11:10 On the Sensitivity of Algebraic Ric-cati Equations,Ji-guang Sun (Umea University)Consider the continuous-time algebraic Riccati equa-tion (CARE) and the discrete-time algebraic Riccatiequation (DARE) which arise in linear control andsystem theory. Appropriate assumptions on the coef-ficient matrices guarantee the existence and unique-ness of symmetric positive semidefinite stabilizing so-lutions. In this paper, we apply the theory of condi-tion developed by Rice to define condition numbersof the CARE and DARE in the Frobenius norm, andderive explicit expressions of the condition numbersin a uniform manner.
11:10-11:30 A Numerically Reliable Method fora Neglected but Unsolved Problem: StateFeedback Decoupling with Stability for (A, B,C, D) Quadruples,Delin Chu (National University of Singapore)The noninteracting control problem with stability for(A,B,C,D) quadruples has been studied for a longtime. But, there are no numerically verifiable solv-ability conditions and no numerically implementablemethods for solving it in the existing literatures.Hence, indeed it is still an unsolved problem from the-oretical and numerical points of view. In this talk, wedevelop a numerically reliable method for solving thisunsolved problem. The main tool that we use is nu-merical linear algebra technique.
11:30-11:50 Large Stability Property of Solu-tions of Large-Scale Discrete-Time Systems,Tanya Lukyanova, Anatoliy Martynyuk(National Academy of Sciences of Ukraine)The aim of this paper is to present one approach tosolution of stability problem for discrete-time systembased on hierarchical Lyapunov function. The ex-ample showing the proposed approach efficiency aregiven.
11:50-12:10 Pole Placement Under Output Feed-back: A Simplification of the Problem,Michael Schilmoeller, Joyce O’Halloran(Portland State University)For a given system defined by the matrix triple(A,B,C), which polynomials are characteristic poly-nomials of A+BKC as K varies? When is this set ofpolynomials dense in the space of all monic polyno-mials of degree n? We show that a polynomial occursas a characteristic polynomial of A+BKC for somematrix K if and only if it occurs as a characteristicpolynomial of A’+B’K’C’ for some matrix K’, where(A’,B’,C’) is related to (A,B,C) via an equivalencerelation. Regarding the question of the density ofthe set of characteristic polynomials, our approach al-lows previously known necessary (and generically suf-ficient) conditions to be rewritten in terms of the fol-lowing two conditions on the matrices B and C: (rankB)(rank C) ¿= n and CB is not the zero matrix.
12:10-12:30 To the Problem of Construction ofLiapunov Functions for Continuous Large ScaleSystems,Vitaliy Slyn’ko, Anatoliy Martynyuk(National Academy of Sciences of Ukraine)No Abstract
Room: 208, Session: FA5Chair: Harry TrentelmanTitle: A Behavioral Approach to Systems, Con-trol and Coding Theory
10:30-10:50 A Behavioral Approach to List De-coding,Jan Willem Polderman (University of Twente)Margreta Kuijper (The University of Melbourne)List decoding may be translated into a bivariate in-terpolationproblem. The interpolation problem is tofind a bivariate polynomial of minimal weighted de-gree that interpolates a given set of pairs taken froma finite field. We present a behavioral approach tothis interpolation problem. With the data points weassociate a set of trajectories. For this set of tra-jectories we construct the Most Powerful UnfalsifiedModel. The bivariate polynomial is then derived froma specific representation of the MPUM.
10:55-11:15 Linear Hamiltonian systems,Paolo Rapisarda (University of Maastricht),H.L. Trentelman (University of Groningen)We study linear Hamiltonian systems using bi-linear and quadratic differential forms. Such arepresentation-free approach allows to use the sameconcepts and techniques to deal with systems isolated

MTNS – 2002 90
from their environment and with systems subject toexternal influences, and allows to study systems de-scribed by higher-order differential equations, thusdispensing with the usual point of view in classicalmechanics of considering first and second-order differ-ential equations only.
11:20-11:40 Approximate Time-Controllabilityversus Time-Controllability,Amol Sasane (University of Twente),M.K. Camlibel (University of Groningen)This paper studies the notions of approximate time-controllability and (exact) time-controllability of be-haviours. In the 1-D case, we show that these twonotions are equivalent and in the n-D case we give anexample of a behaviour which is approximately time-controllable, but not time-controllable. Finally, wediscuss time-controllability of the heat equation. Itturns out that it is time-controllable with respect tothe so-called Gevrey class of second order.
11:45-12:05 On a Class of Time-Varying Behav-iors,Madhu Belur (University of Groningen),M.K. Camlibel (University of Groningen),A.J. Sasane (University of Twente),J.C. Willems (University of Leuven)We study a class of time-varying systems that we en-counter when we look into decomposition of behav-iors. This class is the set of behaviors that are them-selves polynomials in time, with coefficients as time-invariant behaviors. Operators that have such behav-iors as their kernels are studied. We are led to thestudy of skew polynomial ring as the underlying ringfor such operators.
12:10-12:30 Synthesis of Strictly Dissipative Sys-tems and the Strictly Suboptimal State SpaceH-infinity Control Problem,Harry. L. Trentelman (University of Groningen)In this short paper we study the problem of existenceof a controlled behavior that is strictly dissipative withrespect to a quadratic supply rate. The relation be-tween strictness and the rank of a suitable qudraticdifferential form that couples the dissipativity prop-erties of the hidden behavior and the orthogonal com-plement of the plant behavior is analyzed.
Room: 209, Session: FA6Chair: Naomi LeonardTitle: Coordinated Control of Vehicle Networks
10:30-10:50 Stability of Systems of Self-Driven
Particles Undergoing Phase Transitions,A. Stephen Morse (Yale University)No Abstract
10:50-11:10 Stability Properties of Intercon-nected Vehicles,Vijay Kumar, Herbert Tanner, George Pappas(University of Pennsylvania)The paper presents a methodology for analyzing thestability of formations of interconnected vehicles thatare based on leader-follower relations. The methodol-ogy exploits input-to-state stability properties of ba-sic leader-follower interconnections and builds on thepropagation of these properties throughout the net-work to establish global stability bounds. This is for-malized using the notion of (formation ISS), a weakerform of stability than string or mesh stability, whichrelates leader input(s) to formation state errors. Inthis paper we focus on cyclic interconnections of vehi-cles and show how the ISS framework can be extendedto include these structures. This is the first such re-sult for cyclic graphs that represent formations basedon leader-follower controllers.
11:10-11:30 Formations with a Mission: StableCoordination of Vehicle Group Maneuvers,Naomi Leonard (Princeton University),Petter Ogren (KTH),Edward Fiorelli (Princeton University)We present a stable coordination strategy for vehicleformation missions that involve group translation, ro-tation and expansion. The underlying coordinationframework uses artificial potentials and virtual lead-ers. Symmetry in the is exploited to partially decouplethe mission control problem into a formation manage-ment subproblem and a maneuver management sub-problem. The coordination strategy is illustrated inthe context of adaptive gradient climbing missions.
11:30-11:50 Coordinated Control Strategies forNetworked Vehicles: An Application to Au-tonomous Underwater Vehicles,Joao Sousa, Fernando Pereira(Universidade do Porto)The specification and design of coordinated controlstrategies for networked vehicles and systems is dis-cussed. A strategy to find the local minimum ofan oceanographic scalar field with networked au-tonomous underwater vehicles (AUV) is presented.The strategy consists in coordinating the motions ofthe AUVs to implement a modified version of thesimplex optimization algorithm. In the original al-gorithm, the scalar field is given by a function. In themodified version, the scalar field is given by the phe-

MTNS – 2002 91
nomenon itself. The AUVs sample the phenomenonto calculate the directions of descent, and to mini-mize the phenomenon along each direction of descent.The strategy is discussed in the more general contextof coordination and control of networked vehicles andsystems.
11:50-12:10 Group Shape Feedback Control,Raffaello D’Andrea (Cornell University)In this talk we present a method for controlling theshape of a group of vehicles based on absolute and rel-ative measurements. The control objective is a useradjustable combination of the shape of the group andthe absolute position of the group. The techniquesare applied to a group of sixteen mobile robots in theCornell Autonomous Vehicles Laboratory.
12:10-12:30 Hamiltonian Structures for Interact-ing Satellites,P.S. Krishnaprasad (University of Maryland)No Abstract
Room: 210, Session: FA7Chair: Mrdjan JankovicTitle: Nonlinear Control and Applications
10:30-11:00 Application of Nonlinear Lyapunov-based Controllers and Observers to GasolineDirect Injection Engine Charge and TorqueControl,Ilya Kolmanovsky (Ford Research Laboratory)The paper discusses several Lyapunov-based con-troller and observer techniques that enhance the con-ventional Speed-Gradient control design approach.Our developments cover the treatment of the deriva-tive action, time-delays, backstepping via dynamicsurface control, and feedforward governor to satisfypointwise-in-time constraints. Some of these enhance-ments have been already proposed in the prior litera-ture in the context of specific automotive applicationsbut are generalized here; other developments such as afeedforward governor are new. We also review severalconcrete applications of these techniques to controlof gasoline direct injection engines, including torque,air-to-fuel ratio and charge control.
11:00-11:30 Multivariable Extremum SeekingFeedback: Analysis and Design,Kartik B. Ariyur, Miroslav Krstic(University of California, San Diego)The paper provides a multivariable extremum seek-ing scheme, the first for systems with general time-varying parameters. We derive a stability test in a
simple SISO format and develop a systematic designalgorithm based on standard LTI control techniquesto satisfy the stability test. We also supply an ana-lytical quantification of the level of design difficulty interms of the number of parameters and in terms of theshape of the unknown equilibrium map. Moreover, weremove the requirement of slow forcing for plants withstrictly proper output dynamics (and consequent slowconvergence) present in earlier works.
11:30-12:00 Stabilization of Sets Parametrizedby a Single Variable: Application to Ship Ma-neuvering,Roger Skjetne(Norwegian University of Science and Technology),Andrew R. Teel, Petar V. Kokotovic(University of California, Santa Barbara)We consider the problem of stabilizing setsparametrized by a single variable. Using the solu-tion to the maneuvering problem, the state of thesystem is driven to a path that coincides with theset, where the particular location on the path is de-termined dynamically. Attractivity is obtained, andwithin the control structure, we induce a separationof time scales that allows us to achieve near forwardinvariance of the path from a large range of initialconditions.
12:00-12:30 Nonlinear Control and AutomotiveEngine Applications,Mrdjan Jankovic (Ford Research LaboratoryNonlinear control theory has undergone a rapid devel-opment in the past decade. Some of these results andideas have found application in automotive powertraincontrol. In this paper, we illustrate a particular appli-cation where the disturbance decoupling paradigm isused to design a controller that coordinates the elec-tronic throttle and variable cam timing actuators toachieve a desired transient engine performance. Someaspects of this problem relevant to practical applica-tion are also discussed in the paper.
Middle:
Room: 102, Session: FM1Chair: Martin HaenggiTitle: Mathematical Theory of Networks andCircuits
14:00-14:20 On Switched Hamiltonian Systems,Arjan van der Schaft (University of Twente),Maurice Heemels, Karin Gerritsen(Eindhoven University of Technology)In this paper we study the well-posedness and stability

MTNS – 2002 92
of a class of switched linear passive systems. Instru-mental in our approach is the result, also of interestin its own right, that any passive linear system withpositive definite storage function can be representedas a port-Hamiltonian system.
14:20-14:40 Parameter Influence on the Zeros ofNetwork Determinants,Sven Feldmann (University of Kaiserslautern)No Abstract
14:40-15:00 Canonical Realizations of LinearTime-Varying Systems,Fred Neerhoff, P. van der Kloet(Delft University of Technology)In this article, general scalar linear time-varying sys-tems are addressed. In particular, canonical realiza-tions with integrators, multipliers and adders are pre-sented. Essentially, it is shown that the well-knownconfigurations for constant systems can be generalizedto the time-varying context by replacing the conven-tional eigenvalues by the earlier introduced dynamiceigenvalues. However, it is also shown that at leastone configuration is not suitable for such a generaliza-tion.
15:00-15:20 In Search of Sensitivity in NetworkOptimization,Mike Chen, Charuhas Pandit, Sean MeynWe consider the average-cost optimization problemfor a family of stochastic fluid models with Gaussianstatistics. It is shown that optimal switching curvesscale linearly, while second order sensitivity vanishesas network variability increases. Under general condi-tions, the switching curve is approximately affine, andin this case an affine policy obtained from considera-tion of the deterministic fluid model is approximatelyoptimal.
15:20-15:40 Dynamic Eigenvalues for Scalar Lin-ear Time-Varying Systems,Pieter Van der Kloet, F.L. Neerhoff(Delft University of Technology)In this paper, an algorithm is derived for comput-ing the earlier introduced eigenvalues of scalar vary-ing systems. These new types of eigenvalues are keyquantities for describing the dynamic behavior of suchsystems. They generalize the conventional antipodespertaining to constant systems. Essentially, the al-gorithm performs successive Riccati transformationsthat gradually triangularize the accompanying time-varying system matrix.
15:40-16:00 Interconnection Structures in Phys-ical Systems: a Mathematical Formulation,Goran Golo, Orest V. Iftime, Arjan van der Schaft(University of Twente)The power-conserving structure of a physical systemis known as interconnection structure. This paperpresents a mathematical formulation of the intercon-nection structure in Hilbert spaces. Some propertiesof interconnection structures are pointed out and theirthree natural representations are treated. The devel-oped theory is illustrated on two examples: electricalcircuit and one-dimensional transmission line.
Room: 126, Session: FM2Chair: Belinda King, Kirsten MorrisTitle: Distributed Parameter Systems: Appli-cations and Computation, Part I
14:00-14:30 Performance Enhancement of Con-trolled Diffusion Processes by Moving Actua-tors,Michael Demetriou, Nikolaos Kazantzis(Worcester Polytechnic Institute)The present research work deals with the systematicdevelopment and implementation of a practical algo-rithm for an actuator activation and control policythrough a scheme of moving actuators for systemsgoverned by parabolic partial differential equations(PDEs). An illustrative example with simulation re-sults of an 1-D diffusion process is included to supportthe paper’s theoretical findings.
14:30-15:00 Equilibrium Profiles of Tubular Re-actor Nonlinear Models,M. Laabissi, M. E. Achhab(Universite Chouaib Doukkali),Joseph Winkin (University of Namur (FUNDP)),D. Dochain (Universite Catholique de Louvain)The multiplicity of the equilibrium profiles is ana-lyzed for axial dispersion nonisothermal tubular re-actors described by Arrhenius type nonlinear models.It is reported that there is at least one steady stateamong the physically feasible states for such models.Moreover physically meaningful conditions which en-sure the multiplicity of equilibrium profiles are given.
15:00-15:30 Control of Electronic Material,Katherine Kime (University of Nebraska at Kearney)This talk will consider efforts to control solid-statestructures at the quantum level. Such structures aredescribed by the Schrodinger equation and control isexercised by a time-dependent potential term. A ba-sic type of potential is a modulated barrier, and one

MTNS – 2002 93
physical example of control via such a barrier arises inquantum cellular automata. We will discuss schemesfor numerical approximation and also recent work inquantum feedback.
15:30-16:00 Active Sound Field Attenuation viaAcoustic Arrays,H.T. BanksNo Abstract
Room: 129, Session: FM3Chair: William HeltonTitle: Operator Theoretic Methods
14:00-14:20 A Nehari Theorem for Continuous-Time FIR Systems,Gjerrit Meinsma (University of Twente),Leonid Mirkin (Technion), Zhong (Imperial College,London)Explicit formulae are derived for Nehari extensions ofcontinuous time FIR systems
14:25-14:45 Optimal Approximation of LinearOperators: a Singular Value DecompositionApproach,Siep Weiland (Eindhoven University of Technology),Hardy Siahaan (Eindhoven University of Technology),Anton Stoorvogel (Delft University of Technology)We present generalization of singular values and sin-gular value decompositions to operators defined onspaces equipped with the p-norm, where p is arbi-trary. The problem of optimal rank approximation oflinear operators is investigated in this context. Wegive sufficient conditions for the existence of optimalrank approximants in the p-induced norm and discussan application of general-ized singular values for theidentification of dynamical systems from data.
14:50-15:10 Geometrical and Spectral Propertiesof the Time-Varying Riccati Difference Equa-tion,Nevio Carpanese (University of Padova)Operator theoretic methods are used to study time-varying systems. The focus is on the spectral proper-ties in order to give a geometrical parameterization ofsquare summable symmetric solutions of time-varyingRiccati difference equations.
15:15-15:35 A Generalization of the Widrow’sQuantization Theorem,Alexandru Isar, Dorina Isar(“Politehnica” University, Timisoara)
The Widrow’s quantization theorem is analyzed. Thistheorem gives the conditions to be satisfied by theprobability density function of a random signal for itsperfect reconstruction after the quantization process.The disadvantages of this theorem (it’s hypotheses arevery restrictive) are envisaged and some solutions todecrease the effects of these disadvantages, in the caseof different classes of input signals, used in practice,are presented.
15:40-16:00 Functions of System and Their Per-turbations,Alexey (Olexiy) Tikhonov(Taurida National University)We introduce the notion of function for a conservativelinear discrete-time-invariant system. We show thatfunctions of systems naturally appear for problems re-lated to functional models, allow an informative defi-nition of the transfer function, have interesting appli-cations to perturbation theory, scattering theory, andproblems related to factorizations of operator-valuedfunctions.
Room: 138, Session: FM4Chair: David NichollsTitle: Nonlinear Surface Water Waves: Theory,Computation and Experiment
14:00-14:30 Numerical Simulation of Blow-upSolutions of the Vector Nonlinear SchrodingerEquation,Catherine Sulem (University of Toronto)We present numerical simulations of blow-up solutionsof the Vector Nonlinear Schrodinger equation, whicharises as the subsonic limit of the vectorial Zakharovsystem. In the course of our calculations, we observedthe phenomenon of splitting of the solution profile. Tocapture the structure of the solution, we developed adynamic mesh refinement method based on a itera-tive grid distribution method introduced by Ren andWang (J. Comput. Phys., 159(2000), 246)
14:30-15:00 Existence Theory for Traveling Wa-ter Waves in Three Dimensions,Walter Craig (McMaster University)This talk describes the recent results of W. Craigand D. Nicholls on the existence of traveling capilary-gravity water waves in three dimensions. This isa bifurcation problem, with parameters the two di-mensional phase velocity of the solutions, and theresult in the nonresonant case is a construction oftwo-dimensional bifurcation surfaces of solutions. Inresonant cases there is a higher multiplicity of solu-tions, and the proof in this case is related to the reso-

MTNS – 2002 94
nant Lyapunov center theorm of A. Weinstein and J.Moser.
15:00-15:30 Numerical Simulation of TravelingWater Waves,David Nicholls (University of Notre Dame)The author will discuss numerical methods for thesimulation of two and three dimensional travelinggravity water waves, and present results on observ-able wave-forms and their stability. If time permits adiscussion of numerical stability issues in these calcu-lations will also be presented.
15:30-16:00 Similarities between the Quasi-Bubble and the Generalized Wave ContinuityEquation Solutions to the Shallow Water Equa-tions,John H. Atkinson, Joannes Westerink(University of Notre Dame)The author will discuss numerical methods for thesimulation of two and three dimensional travelinggravity water waves, and present results on observ-able wave-forms and their stability. If time permits adiscussion of numerical stability issues in these calcu-lations will also be presented.
Room: 210, Session: FM5Chair: Lars Gruene, Fabian WirthTitle: Input-to-State Stability, Part II
14:00-14:30 Input-to-state stability of pulsewidth modulated control systems,Andrew Teel L. Moreau, D. Nesic(University of California, Santa Barbara),Results on stability and input-to-state stability inpulse-width modulated (PWM) control systems arepresented. The results are based on a recent gener-alization of two time scale stability theory to differ-ential equations with disturbances. In particular, av-eraging theory for systems with disturbances is usedto establish the results. The nonsmooth nature ofPWM systems is accommodated by working with up-per semicontinuous set-valued maps, locally Lipschitzinflations of these maps, and locally Lipschitz param-eterizations of locally Lipschitz set-valued maps.
14:30-15:00 ISS for Dynamic Inputs,Fabian Wirth (University of Bremen)The standard definition of ISS consists of a growthcondition in terms of the size of the input and the ini-tial condition for arbitrary measurable inputs. Thisproperty can be characterized by Lyapunov functions.If the class of inputs is restricted to the outputs of
a dynamical system then some interesting new phe-nomena occur. We discuss charactarization of the dy-namic situation with the help of Lyapunov functionsand some applications.
15:00-15:30 A Relaxation Theorem for Differen-tial Inclusions with Applications to StabilityProperties,Yuan Wang (Florida Atlantic Univerity),Eduardo Sontag (Rutgers University),Brian Ingalls (Cal Tech)The fundamental Filippov–Wazwski Relaxation The-orem states that the solution set of an initial valueproblem for a locally Lipschitz inclusion is dense in thesolution set of the same initial value problem for thecorresponding relaxation inclusion on compact inter-vals. In our recent work, a complementary result wasprovided for inclusions with finite dimensional statespaces which says that the approximation can be car-ried out over non-compact or infinite intervals pro-vided one does not insist on the same initial values.This note extends the infinite-time relaxation theo-rem to the inclusions whose state spaces are Banachspaces. To illustrate the motivations for studying suchapproximation results, we briefly discuss a quick ap-plication of the result to output stability and uniformoutput stability properties.
15:30-16:00 Characterization of the Non-Uniform in Time ISS Property and Applica-tions,Iasson Karafyllis, J. Tsinias(National Technical University of Athens)For time-varying control systems various equivalentcharacterizations of the non-uniform in time ISS prop-erty are established. These characterizations enableus to derive sufficient conditions for ISS concerningcomposite time-varying systems. One of the mainresults generalizes the well-known small-gain theo-rem due to Jiang-Teel-Praly for autonomous systemsunder the presence of uniform in time ISS.
Room: 126, Session: FP2Chair: Belinda King, Ruth CurtainTitle: Distributed Parameter Systems: Appli-cations and Computation, Part II
16:30-16:50 POD Based Control of Beam Vibra-tions: Methodology and Experimental Imple-mentations,Gregory P. Hicks, Brian Lewis(North Carolina State University)In this talk we discuss real time implementation of

MTNS – 2002 95
control methodologies for the attenuation of beam vi-brations in a smart structure paradigm caused by anarrow-band exogenous force. By narrow-band ex-ogenous force we mean a periodic force over a narrowfrequency band or a particular harmonic. In particu-lar, a central part of this focus is the Proper Orthogo-nal Decomposition (POD) reduction technique and itsapplication to real-time control of beam vibrations.
16:50-17:10 A Comparison of Balancing Tech-niques for Reduced Order Controllers for Sys-tems of PDEs,Belinda King, Katie A. E. Camp(Virginia Tech)Reduced order controllers are often needed to achievereal time control for physical systems described byPDEs. Two methods of reduced order control designare balanced truncation and LQG balancing. Bal-anced truncation involves reducing the approximatingfinite-dimensional system and then designing a controlfor the low order system. LQG balancing involves con-trolling the full order approximating system and thenreducing the control. This presentation will describeboth balanced reduction methods and give numericalresults.
17:10-17:30 Modeling and Control Issues Asso-ciated with Atomic Force Microscopy,Ralph Smith (NCSU)Atomic force microscopes employ cylindrical orstacked piezoceramic actuators to obtain angstromlevel resolution. However, even at the low drive lev-els used to achieve these tolerances, the actuatorsexhibit hysteresis and certain constitutive nonlineari-ties. These effects must be accurately quantified andcontrolled to maintain the resolution, robustness andspeed of both current instruments and future gener-ations of devices based on this technology. In thistalk, a variety of techniques for modeling hystere-sis in piezoceramic materials will be discussed, andinverse compensation techniques for linear and non-linear control design in the microscopes will be pre-sented. Finally reduced-order models based on properorthogonal decompositions (POD) will be employed toprovide controllers which can be implemented in realtime.
17:30-17:50 The Effect on Control Design of aStabilized Finite Element Approximation forBurgers’ Equation,Belinda King (Virginia Tech)The Galerkin approximation of Burgers equation isnumerically unstable for small viscosity coefficientsepsilon. By implementing the Galerkin Least Squaresmethod, terms can be added stabilizing the approxi-mation. We will use cubic splines in our approxima-tion and will apply linear feedback control law devel-oped for the non-stabilized problem. Our results willshow that the functional gains for the non-stabilizedcode and the stabilized code for small viscosity coeffi-cients epsilon will be nearly identical while the func-tional gains for code that use larger viscosity coeffi-cients will vary considerably.
17:50-18:10 Functional Gain Computations fora 1D Parabolic Equation Using Non-UniformMeshes.,John Burns, Belinda B. King, Lizette Zietsman(Virginia Tech)We consider a numerical algorithm for computingfunctional gains that define optimal feedback laws forDirchlet boundary control of parabolic equations. Thefocus is on using non-uniform meshes to improve con-vergence of finite element schemes. Since boundarycontrol problems of this type often lead to functionalgains with support near the boundary, uniform meshesare not optimal. Numerical examples are presentedto illustrate the effectiveness of using a non-uniformmesh concentrated near the boundary.
18:10-18:30 A Continuous Control DesignMethod,Jeff Borggaard (ICAM,Virginia Tech)It is clear that initial successes in challenging dis-tributed parameter control problems will be achievedas researchers continue to exploit the underlyingstructure of these problems. In this talk, we look atstrategies to exploit two features of these problems:the sparsity of finite element approximations and thecase where the dimension of the control inputs andoutputs are small, both of which make Chandrasekharequations an effective computational tool.
MTNS – 2002 96
Index
A
Absil, P.-A. WM4Achhab, M.E. FM2Akunov, Taalaibek A. THA5Al-Towlem, Tarek TUM3Alber, Mark WM1Albert, Reka THP1Alpay, Daniel MM4Alpay, Daniel WA5Altafini, Claudio MA6Altafini, Claudio WP6Antoulas, Thanos WA4Antoulas, Thanos WP4Antsaklis, Panos WM6Aracil, Javier THP5Ariyur, Kartik B. FA7Arov, Damir THA2Atkinson, J. H. FM4Aydin, Nuh TUM1
B
Bagchi, Arunabha THA3Bai, Zhaojun WA4Baillieul, John THP5Baker, Brian M. WA1Balakrishnan, V. THM4Ball, Joseph A. TUA3Ball, Joseph A. TUM4Ball, Joseph A. WM3Banerjee, Adrish TUP1Banks, H.T. FM2Barabasi, Albert-Laszlo WAINV2Barhorst, Alan TUA2Barry, J. WM2Bastin, Georges MA5Basu, Sankar WP3Bauer, Peter WA2Belur, Madhu FA5Belyi, Sergey TUM4Bertsimas, Dimitris WP5Blankenstein, Guido THM6Bloch, Anthony M. THM6Bloch, Anthony M. F-PlenaryBlondel, Vincent WA7Bolotnikov, Vladimir TUM4Borggaard, Jeff FM6Bortolin, Gianantonio MA2Bose, Nirmal WP3Boulant, Nicolas TUA6Branicky, Michael MP6
Brazhnik, Paul FA1Brockett, Roger M-InvitedBroucke, Mireille MP6Buchot, Jean-Marie TUM5Bullo, Francesco MP6Bullo, Francesco THM6Burns, John FM6Byrnes, C. I. TUM4Byrnes, C.I. FA2
C
Cadic, Maria THP6Cajueiro, Daniel FA3Calafiore, Giuseppe TUA7Calistru, Catalin Nicolae TUP6Calkin, Neil MM1Camlibel, M.K. FA5Camlibel, M.K. FA5Camp, Katie A. E. FM6Campbell, Stephen TUA7Campi, Marco THP6Caponetto, Riccardo WA6Caponetto, Riccardo TUA5Caramanis, Constantine WP5Carpanese, Nevio FM3Carter, John THA4Casal, Arancha WM1Cernea, Aurelian MP2Cervera, J. THM6Chahlaoui, Younes WA4Chai, Li THM4Chaichanavong, Panu WM2Chakraborty, Arup K. WM1Chang, Dong Eui THP5Chatterjee, Sankar TUA2Chaves, Madalena TUA4Chen, Mike FM1Chesi, Graziano MP2Chesi, Graziano THA6Chiuso, Alessandro WM7Chu, Delin FA4Climent, Joan-Josep WP2Cohen, Nir MA4Cole, A. C. MM2Collins, James J. FA1Colon, Diego THP6Colonius, Fritz TUA4Conchello, Jose Angel TUM2Coombs, Dan WP1Cortes, Jorge THP5
Cory, David G. TUA6Costello Jr., Daniel TUP1Cowan, Noah THA6Craig, Walter FM4Craighead, Steven THM3Crouch, Peter THM6Curtain, Ruth THA2Curtain, Ruth THA2Curtain, Ruth THP2Curtiss, Michael M. MP6
D
D’Alessandro, Domenico WP6D’Alessandro, Domenico MA6D’Andrea, Raffaello F-InvitedD’Andrea, Raffaello FA6Datta, Biswa N. WP4Datta, Ruchira WP5Dauphin, G. THP2Davis, Mark WM1Day, Martin MP2Dayawansa, Wijesura P. TUA2De Cock, Katrien MM3De Koning, W.L. TUP4De Koning, Willem L. WA7de la Fuente, Alberto FA1De Leenheer, Patrick MA5De Moor, Bart MM3de Oliveira, Mauricio THA7de Snoo, Henk TUM4Deconinck, Bernard THA4Deistler, Manfred TUM6Del Buono, N. WM4Delattre, Cedric TUP5Demetriou, Michael FM2Devanathan, Rajagopalan MM2Dewilde, Patrick WA5Dewilde, Patrick THP4Dey, Subhrakanti TUA5Dieci, Luca WM4Digailova, Irina TUM6Dijksma, Aad MM4Dijksma, Aad MP4Dochain, Denis FM2Dochain, Denis TUP5Dougal, Roger MA2Dragan, Vasile TUP6Dragan, Vasile FA3Duncan, Tyrone THP3Dustin, Michael TUP2
MTNS – 2002 97
Dym, Harry MM4Dymkou, S. THA5Dymkov, M. THA5
E
Edidin, Michael WM1Eidelman, Yuli WA5El Ghaoui, Laurent TUA7Elia, Michele TUM1Elia, Nicola MP1Enquist, Per MM3Eremenko, Alex MM5Evans, Robin J. TUA5Evans, Robin J. MP1
F
Fabijonas, Bruce MA2Fagnani, Fabio MP1Farina, Lorenzo MA5Fathpour, Nanaz WM5Feintuch, Avraham WA5Feldmann, Sven FM1Fernanez-Anaya, G. TUP6Ferrante, Augusto MA6Ferrante, Augusto MM3Finesso, Lorenzo WM7Fiorelli, Edward FA6Foote, Jefferson WA1Forgas, Gabor THM1Fortuna, Luigi MM6Fortuna, Luigi TUA5Fortuna, Luigi WA6Fortunato, Evan M. TUA6Frasca, Mattia TUA5Frazho, A. MM4French, Mark MA7French, Mark MA7Fridman, Emilia FA2Friedland, Shmuel MA1Frossard, Pascal WA2Fuad, Yusuf TUP4Fuhrmann, Paul A. MA7Fuhrmann, Paul A. TUP1Fujimoto, Kenji THP5Fujisawa, Yoshinori WP2Funahashi, Yasuyuki TUM3Fuwa, Yasushi WP2
G
Gumussoy, Suat FA2Gabrielov, A. MM5
Galkowski, K. THA5Galkowski, Krzysztof TUM3Galkowski, Krzysztof THA5Gallivan, K. WA4Garrido, R. TUM6Gayer, Tobias WA6Geman, Oana TUP6Gerritsen, Karin FM1Gilliam, David FA2Gluesing-Luerssen, Heide MP5Gluesing-Luerssen, Heide TUP1Gluesing-Luerssen, Heide TUP1Gluesing-Luerssen, Heide WA3Gohberg, Israel WA5Goldstein, Byron WP1Golo, Goran WM5Golo, Goran FM1Gombani, A. MM3Gombani, Andrea THA3Gombao, Sophie TUM5Gomez-Estern, Fabio THP5Gordillo, Francisco THP5Gosh, Bijoy TUA2Gough, N. E. MM2Gray, W. Steven MM2Greemtree, A.D. WP6Greferath, Marcus TUM1Greferath, Marcus TUM1Gregor, Jiri TUP3Grimble, Michael MA7Grimble, Michael TUM5Gruene, Lars TUA4Guo, B.Z. THM2Gurvits, Leonid MP2Gutman, Per-Olof MA2Gutman, Per-Olof MA7Schmale, Wiland TUP1
H
Habets, Luc C.G.J.M. MP5Haenggi, Martin WA2Hagerty, Patrick THP5Hajek, Bruce M-PlenaryHan, Guangyue TUA1Hanson, Floyd MA2Hanson, Floyd B. WP4Hanson, Floyd B. THP3Hanzon, Bernard MM6Hanzon, Bernard TUM6Hanzon, Bernard TUP6Hanzon, Bernard FA3Hashimoto, K. THA6Hassi, Seppo TUM4Hassibi, Babak MP4Hassibi, Babak TUA7
Hatzimanikatis, Vassily FA1Havel, Timothy TUA6Havel, Timothy F. WA1Heemels, Maurice FM1Heinig, Georg THP4Heinkenschloss, M. TH-InvitedHelmke, Uwe MA7Helmke, Uwe MM6Helmke, Uwe WM4Helton, J. William W-PlenaryHelton, J. William THA7Henderson, Diane THA4Henkel, Heather WP2Hespanha, Jaoa THP6Hespanha, Joao MP6Hicks, Gregory P. FM6Hinrichsen, Diederich MP5Hofmann, Stefan TUM6Hood, Jeff B. FA2Hoops, Stefan FA1Hoshi, Yoshikatsu WA7Huang, Xianqing TUP4Huang, Xianqing TUP4Hueper, Knut W-Invited
I
Idczak, Dariusz TUP3Iftime, Orest V. THA2Iftime, Orest V. FM1Ingalls, B. FM5Interlando, Carmelo TUM1Isar, Alexandru FM3Isar, Dorina FM3
J
Jacob, Birgit THM2Jacobsen, Elling W. MA2Jaimoukha, Imad M. WP4Jakubowski, J. THP3Jank, Gerhard MM6Jankovic, Mrdjan FA7Jaschke, Stefan R. THA3Jeoong, Hawoong THP1Jibetean, Dorina MM6Jonsson, Ulf FA3Jonckheere, Edmond A. WM5Jordan, Jens WM4Jordan, Michael I. WM7
K
Kaczorek, Tadeusz TUP3
MTNS – 2002 98
Kaern, Mads FA1Kahng, Byungnam THP1Kalyuzhniy-Verbovetzky, D. WM3Karafyllis, Iasson FM5Karow, Michael THM4Kavcic, Aleksandar WM2Kawamata, Masayuki THA5Kazantzis, Nikolaos WA6Kazantzis, Nikolaos FM2Kazufumi, Ito FA2Kern, Daniel MA2Khaneja, Navin WM2Kheifets, Alexander TUM4Kime, Katherine FM2Kimura, Hidenori TUP6King, Belinda FM6King, Belinda FM6King, Belinda B. FM6Klemesrud, Bruce THM3Kliemann, W. TUA4Koetter, Ralf TUA1Kokotovic, Petar V. FA7Kolesnikov, Alexander MA2Kolesnikov, Alexander MA2Kolesnikov, Anatoly MA2Kolesnikov, Anatoly MP2Kolmanovsky, Ilya FA7Komenda, Jan THM7Kongprawechnon, Waree TUP6Koo, Jaehoon WP3Koutsoukos, Xenofon WM6Krajnik, Eduard WP3Kravaris, Costas WA6Kremer, Dirk MM6Kremer, Dirk MM6Krener, Arthur J. WA6Krishnaprasad, P.S. FA6Krstic, Miroslav FA7Kugi, Andreas WM5Kuijper, Margreta FA5Kumar, Vijay FA6Kunisch, Karl F-InvitedKurien, James WM6Kurzhanski, Alexander B. MP2Kurzhanski, Alexander B. TUM6Kuzmenko, Andrew MP2
L
Laabissi, M. FM2Lagonotte, Patrick TUP5Langer, Heinz MP4Langer, Matthias MP4Le Boudec, Jean-Yves WA2Le Boudec, Jean-Yves WA2Lee, Peter L. WM1
Lemmon, M.D. WM6Lemonnier, D. WA4Leonard, Naomi FA6Levchenko, Andrea THA1Levy, Bernard TUA7Lewin, Paul TUM3Lewis, Andrew THM6Lewis, Andrew THM7Lewis, Brian FM6Lewkowicz, Izchak MA4Li, Tien-Yien MM5Li, Yaqin MM2Liberzon, Daniel TUA4Lin, Wei TUP4Lin, Wei TUP4Lindquist, Anders TUM4Lippuner, Dani WM2Liu, Jialing MP1Loeliger, Hans-Andrea M-InvitedLoeliger, Hans-Andrea WM2Lomadze, Vakhtang MP5Lomadze, Vakhtang TUA5Lomadze, Vakhtang TUA5Lopez, L. WM4Lototsky, Sergey MP3Lukyanova, Tanya FA4Luo, Li THP6Lynch, Kevin M. THM6
M
Mahony, R. WM4Malakorn, Tanit TUM4Malinovsky, Vladimir TUA6Marcus, Brian WM2Marcus, P. TUA2Mareels, Iven THP6Mareels, Iven THP6Martinez, Sonia THP5Martin, Clyde TUA2Martin, Clyde TUA2Martin, Clyde FA3Martin, Peter MA7Martinez-Garcia, Juan C. TUM6Martinez-Garcia, Juan C. TUP6Martynyuk, Anatoliy FA4Martynyuk, Anatoliy FA4Matignon, Denis THP2Matignon, Denis THP2Maze, Gerard WP2Mboup, Mamadou TUP5McClamroch, N. Harris MM2McCullough, Scott TUM4McEliece, Robert J. TU-InvitedMcEneaney, William MM2McEneaney, William THP3
McLaughlin, S. WM2Meerbergen, K. WA4Mehl, Christian MM6Meinsma, Gjerrit FM3Mendes, Pedro FA1Meyn, Sean FM1Mezic, Igor FA2Mezouar, Youcef THA6Michaletzky, Gyorgy MM3Michel, A.N. WM6Micheli, Mario WM7Michtchenko, Anna WM5Mikkola, Kalle M. THA2Miller, Daniel THP6Minchenko, Leonid MM2Mirkin, FM3Mirkin, Boris MA7Mitter, Sanjoy MP1Mitter, Sanjoy WM2Mohamedy, Alaa TUM5Molchanov, A.P. WM6Monico, Christopher WP2Moore, Helen WM1Moreau, L. FM5Morettin, Andrea THM5Mori, Kazuyoshi MP5Morozan, Teodor FA3Morris, Kirsten THM2Morris, Kirsten THP2Morse, A. Stephen FA6Muscato, Giovanni MM6
N
Nabieva, Elena WM1Nagamune, Ryozo TUP6Nair, Girish MP1Nair, Girish TUA5Nakaura, Shigeki WA7Nayak, Aravind WM2Neerhoff, F.L. FM1Neerhoff, Fred FM1Nesic, D. FM5Newman, Mark THA1Nicholls, David FM4Nikoukhah, Ramine TUA7Nikoukhah, Ramine TUA7
O
O’Halloran, Joyce FA4O’Sullivan, Michael TUM1Ober, Raimund J. TUM2Ober, Raimund J. TUA6Ogren, Petter FA6

MTNS – 2002 99
Olivi, Martine TUP6Olshevsky, Vadim THP4Ooba, Tatsushi TUM3Opmeer, Mark R. THA2Ordys, Andrzej TUM5Ortega, Antonio MP6Ortega, Romeo THP5Ostrowski, Jim THA6Ostrowski, Jim P. THP5Owens, D. H. THA5Owens, David H. TUM3Owens, David H. THA5Ozbay, Hitay FA2
P
Pait, Felipe THP6Pandit, Charuhas FM1Papakos, Vasilios WP4Pappas, George J. WM5Pappas, George J. THM7Pappas, George J. FA6Parrilo, Pablo A. TUA5Parrilo, Pablo A. WP5Parrilo, Pablo A. THA7Pasik-Duncan, B. THP3Pavon, Michele MA6Pecora, Lou THM1Peeters, Ralf TUP6Pereira, Fernando FA6Petersen, Mark A. MA4Picci, Giorgio MM3Picci, Giorgio WM7Picci, Giorgio WM7Pinzoni, Stefano MM3Pivovarchik, Vjacheslav MP4Plischke, Elmar MP5Polderman, Jan Willem THP6Polderman, Jan Willem THP6Polderman, Jan Willem FA5Polis, Michael TUP5Polpitiya, A. TUA2Popov, Andrey MA2Popovici, Adriana WP3Popovici, Dan Emanuel WP3Popovici, Dan Emanuel FA3Porto, Domenico WA6Prajna, Stephen TUA5Prandini, M. THP6Prattichizzo, D. THA6Pravia, Marco A. TUA6Premaratne, Kamal WA2Provost, A. MA5Putinar, Mihai WP5
Q
Qian, Chunjiang TUP4Qiu, Li THM4
R
Raccanelli, Giorgio MA6Radcliffe, James TUM3Ramakrishna, Viswanath WP6Ran, A. C. M. MA4Rantzer, Anders WA7Rapisarda, Paolo FA5Raymond, Jean-Pierre TUM5Rebarber, Richard THM2Reddy, Tim WM1Reurings, Martine C. B. THA7Reznick, Bruce WP5Ribarits, Thomas TUM6Ricardo, Sandra MM6Roberson, Dawnlee TUM6Rocha, Paula TUP3Rocha, Paula THM5Rodman, Leiba MA4Rogers, Eric TUM3Rogers, Eric THA5Rogers, Eric THA5Rosenthal, Joachim TUA1Rosenthal, Joachim TUP1Rosenthal, Joachim WP2Rovnyak, Jim MM4Runggaldier, W. J. TH-InvitedRunggaldier, Wolfgang J. THA3Russell, David FA2
S
Saito, Osami TUM3Sakhnovich, Alexander L. MM4Sakhnovich, L. A. MA4Salazar-Silva, G.H. TUM6Salapaka, Murti WA6Sampei, Mitsuji WA7Sanei, Ahmad MA7Sanyal, Amit K. MM2Sarkissian, Daniil WP4Sasane, Amol J. FA5Sasane, Amol J. THA2Sasane, Amol J. FA5Sasane, Amol J. THA2Savageau, Michael A. FA1Scanavino, Bartolo TUP1Schilmoeller, Michael FA4Schirmer, Sonia WP6Schirmer, Sonia G. MA6Schlacher, Kurt WM5
Schmale, Wiland TUP1Schmidt, Henning MA2Schovanec, Lawrence TUA2Schrader, Cheryl TUM6Schroder, Dierk TUM6Schuck, Peter TUP2Schumacher, J. M. (Hans) THA3Sebastian, Abu WA6Segur, Harvey THA4Sepulchre, Rodolphe WM4Shang, Ying WM6Shen, Jinglai MM2Shi, Yun Q. WP3Shokrollahi, Amin THP4Shondin, Yuri MP4Shubov, V.I. FA2Siahaan, Hardy FM3Silva-Ortigoza, Ramon WA7Sindano, H. MM2Sira-Ramirez, Hebert WA7Sivergina, Irina TUP5Skjetne, Roger FA7Sklarz, Shlomo WP6Skoogh, Daniel WA4Slyn’ko, Vitaliy FA4Smarandache, Roxana TUM1Smarandache, Roxana TUP1Smith, Hal MA5Smith, Ralph FM6Solomon, A. I. MA6Solyom, Stefan WA7Song, Guobiao MP6Sontag, Eduardo TUA4Sontag, Eduardo TH-PlenarySontag, Eduardo FM5Sorensen, Dan WA4Soulier, Fabien TUP5Sousa, Joao FA6Spitkovsky, I. M. MA4Srai, Manjit Singh MM2Staffans, Olof TH-InvitedStaffans, Olof THA2Stefan, Radu MM6Stern, Lawrence WP1Stewart, Michael THP4Stockbridge, Richard H. MP3Stoica, Adrian TUP6Stoorvogel, Anton FM3Strang, Gilbert TU-PlenaryStriha, Melissa TUP1Sugie, Toshiharu THP5Sulem, Catherine FM4Sulikowski, Bartek THA5Sumen, Cenk WM1Sun, Ji-guang FA4Sun, Ye WM6Suresh Kumar, K. THA3
MTNS – 2002 100
T
Tabuada, Paulo WM5Taksar, Michael THM3Talasila, Viswanath WM5Tannenbaum, Allen F-InvitedTanner, Herbert FA6Tannor, David WP6Tatikonda, Sekhar MP1Tatikonda, Sekhar WM2Tchobanou, Mikhail WM3Teel, Andrew FM5Teel, Andrew R. FA7Teklemariam, Grum TUA6Tesi, Alberto MP2Theys, Jacques WA7Thiran, Patrick WA2Thompson, Nancy L. TUP2Tikhonov, Alexey (Olexiy) FM3Tomas, Gilberto THP1Tong, Lang THP4Topchiev, Boris TUP4Treichl, Thomas TUM6Trentelman, Harry L. FA5Trentelman, Harry L. FA5Tretter, Christiane MP4Trumpf, Jochen MA7Tsekanovskii, E. R. TUM4Tsinias, J. FM5Turinici, Gabriel TUA6
U
Ushakov, Anatoly V. THA5Ushida, Shun TUP6
V
Valcher, Maria Elena MA5van der Kloet, P. FM1Van der Kloet, Pieter FM1van der Mee, Cornelis MP4van der Schaft, Arjan TU-Invitedvan der Schaft, Arjan WM5van der Schaft, Arjan THM6van der Schaft, Arjan FM1van der Schaft, Arjan FM1van der Veen, Alle-Jan THP4van der Woude, J.W. TUP4Van Dooren, P. WA4Van Dooren, P. WA4van Schuppen, Jan H. MP5van Schuppen, Jan H. THM7
Vandendorpe, A. WA4Vandendorpe, Antoine WA4Varaiya, Pravin MP2Vasudevan, Lavanya MP6Vatta, Francesca TUP1Verduyn Lunel, Sjoerd M-InvitedVerriest, Erik WM5Verschelde, Jan MM5Verscheure, Olivier WA2Veselov, Gennady MA2Vespignani, Alessandro THM1Vettori, Paolo TUP4Vicino, A. THA6Vicino, Antonio MP2Vinnikov, Victor TUA3Vladimirov, Alexander WA7Vojnovic, Milan WA2Volosevich, Aleksey MM2Vontobel, Pascal O. TUA1Vontobel, Pascal O. WM2
W
Wang, Dianhui MP5Wang, Dianhui TUA5Wang, Hui MP3Wang, Long WA7Wang, Xiaochang MM5Wang, Xiaochang WP2Wang, Xiaoshen MM5Wang, Yijing WA7Wang, Yuan FM5Wang, Yusong MM5Ward, E. Sally TUM2Weeks, William MM1Weiland, Siep FM3Westerink, Joannes FM4Westman, J. J. WP4Westman, J. J. THP3Westman, John MA2Willems, Jan C. FA5Willems, Jan C. W-InvitedWillems, Jan C. WA3Willems, Jan C. THM5Winkin, Joseph TUP5Winkin, Joseph FM2Wirth, Fabian MP5Wirth, Fabian FA4Wirth, Fabian FM5Wittenmark, Bjorn MP1Woerdeman, H. J. MA4Woerdeman, Hugo THM4Wofsy, Carla WP1Wong, Wing Shing MP1
Wood, Jeff TU-InvitedWoodburn, Cynthia WM3Woolsey, Craig THM6Wu, Mengnien MM5
X
Xiao, MingQing WA6Xibilia, Maria Gabriella MM6Xie, Guangming WA7Xie, Min WA2Xu, Li TUM3Xu, Li THA5Xu, Xuping WM6
Y
Yamada, Minoru TUM3Yamamoto, Yutaka THM2Yang, Shaohua WM2Yin, George MP3Yin, George THP3Yin, K. THP3Ying, Jiang-Qian THA5Yoneyama, Takashi FA3Yoshizawa, Shintaro MM6Yu, Runyi MP5Yu, Runyi TUA5
Z
Zampieri, Sandro MP1Zefran, Milos MP6Zehetleitner, Kurt WM5Zenkov, Dimitri THM6Zerz, Eva WA3Zerz, Eva THM5Zhang, Hong THP5Zhang, Jinsong WA2Zhang, Q. THP3Zhang, Xi Min WP3Zhao, Feng WM6Zhirabok, Aleksey WM5Zhong, FM3Zhou, X. Y. MP3Zhou, Xun Yu THM3Zhou, Yishao FA3Zietsman, Lizette FM6Zirilli, Francesco TUM5Zwart, Hans THM2