-
Multi-Hypothesis Structures and Taxonomies for Combat
Identification Fusion
Tod M. Schuck, J. Bockett Hunter, Daniel D. WilsonSeptember
2004
Copenhagen DenmarkPaper #141
9th International Command and Control Research and Technology
Symposium
-
9th ICCRTS Sept 2004 paper #141 -2Copyright Lockheed Martin
Maritime Systems and Sensors
Agenda
Presentation Objective
Architecture Definition for Disparate Information
Taxonomy f-refinement
Partition Refinement
Canonical Mapping
Response Mapping
CID Realization of JDL Model
CID Bayesian Network
CID Situational Awareness Fusion Expansion
Conclusions and Future Work
-
9th ICCRTS Sept 2004 paper #141 -3Copyright Lockheed Martin
Maritime Systems and Sensors
Presentation Objective
Address movement of information across multiple hypothesis
classes
Relate it to developing the identification of objectsDescribe
how it can be combined both within and between JDL levels
Result will be an information architecture that is naturally
adaptive to information regardless of quality, level,
specificity
We want to answer the question, “How can we establish the
relationship between information sets such as
needed for a fusion process????”
-
9th ICCRTS Sept 2004 paper #141 -4Copyright Lockheed Martin
Maritime Systems and Sensors
An Environment of Disparate Information…
-
9th ICCRTS Sept 2004 paper #141 -5Copyright Lockheed Martin
Maritime Systems and Sensors
Solution Requires Good Architecture Definition
Defining architecture requires investigation into detailed
taxonomic relationships between information sets and subsequent
canonical mappingsSubsequent response mapping can be definedResults
can be tied into JDL model
Taxonomy – a classification scheme for objects with mutually
exclusive labels (parallels study of ontologies)
CID {Friend, Assumed Friend, Hostile, etc.}Nationality {US,
Russia, France, Iraq, etc.}Category {Air, Sea, Land, etc.}Platform
{Fighter, Bomber, Civil, etc.}Type {F-14, F/A-18, F-22, etc.}Class
{F-14A, F/A-18D, etc.}
-
9th ICCRTS Sept 2004 paper #141 -6Copyright Lockheed Martin
Maritime Systems and Sensors
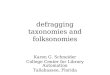
Taxonomy f-refinement
Taxonomy A is an f-refinement of taxonomy B if:f is a function
such that if then
where ϕ = empty set BAf →: 21 bb ≠
ϕ=∩ −− )()( 21
11 bfbf
F/A-18A F/A -18B F/A - 18C F/A -18D F/A –18E F/A –18F
F - 16 F/A-18
A
B
f
F - 16A F - 16B F - 16C F-16D F/A-18A F/A -18B F/A - 18C F/A
-18D F/A –18E F/A –18F
F - 16 F/A-18
A
B
f
F - 16A F - 16B F - 16C F-16D
If a taxonomy of A is an f-refinement of taxonomy B and a ∈A, b
∈ B, and f(a) = b, we say that a is an f-refinement of b
Example: F/A-18A in the Class taxonomy is a refinement of F/A-18
in the Type taxonomy
-
9th ICCRTS Sept 2004 paper #141 -7Copyright Lockheed Martin
Maritime Systems and Sensors
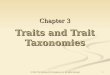
Partition Refinement
Given a set S of objects, a taxonomy imposes a partition on the
setEach element of the partition is the set of all elements of S
for which a single element of the taxonomy is the appropriate
nameExample: an element of the partition imposed on aircraft by the
Type taxonomy is the set of all F-15s, all 747s, etc.A taxonomy T1
is a refinement of another taxonomy T2 if the partition imposed by
T1 is a refinement of the partition imposed by T2
F - 16 F/A-
18 747
Mig-29
A340
F/A-18FF/A -18EF-16A
F - 16B
F-16C F-16D
F/A-18A
F/A-18D
F/A-18B
F/A-18CF - 16
F/A-18 747
Mig-29
A340
F/A-18FF/A -18EF-16A
F - 16B
F-16C F-16D
F/A-18A
F/A-18D
F/A-18B
F/A-18C
-
9th ICCRTS Sept 2004 paper #141 -8Copyright Lockheed Martin
Maritime Systems and Sensors
Canonical Mapping
Canonical mappings provide a way to exploit information about an
object from different taxonomies to categorize the object in one of
those taxonomies, or in another, completely different, taxonomySet
of canonical mappings must be defined between any two related
taxonomies
T 1
T 3
T 4
T 2
T 5
T 6
m 1m 2
m 3
In the case of a collection of taxonomies that are successive
refinements, the canonical mappings reflect the hierarchical nature
of the taxonomies themselvesExample: sets T6 and T3 are related
through both the mapping m3 and the composite mapping m2*m1 (so not
a true canonical mapping)
-
9th ICCRTS Sept 2004 paper #141 -9Copyright Lockheed Martin
Maritime Systems and Sensors
Response Mapping
Response mapping is a way to interpret a response with elements
from one taxonomy in terms of another taxonomyProvides a means of
interpreting a response with elements from more than one taxonomy
in the various referenced taxonomies
Example: let R be a response from a source of information
composed of a set of attributes, let the canonical mapping from
taxonomy Ti to taxonomy Tj be mij- Each taxonomy potentially has
elements that are part of the response (R1 and R2 in the figure),
as well as elements that are the images, under a canonical mapping,
of elements in other taxonomies (m12(R1), m21(R2),m13(R1),
m23(R2)
m12(R1)
T 1 T2 T3
R R2R1
m12m23
m13
m12(R1) m13(R1)
m23(R2)
m21
m12(R1)m21(R2)m12(R1)
T 1 T2 T3
R R2R1
m12m23
m13
m12(R1) m13(R1)
m23(R2)
m21
m12(R1)m21(R2)m12(R1)m12(R1)
T 1 T2 T3
R R2R1
m12m23
m13
m12(R1) m13(R1)
m23(R2)
m21
-
9th ICCRTS Sept 2004 paper #141 -10Copyright Lockheed Martin
Maritime Systems and Sensors
JDL Model and CID Realization
JDL Model CID Implementation
-
9th ICCRTS Sept 2004 paper #141 -11Copyright Lockheed Martin
Maritime Systems and Sensors
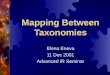
A priori CID Bayesian Network (Level 1)
IDF 1 4 AF 1 4 BF 1 4 DF 1 6 AF 1 6 BF 1 6 CF 1 6 DF A 1 8 A CF
A 1 8 B DF A 1 8 EF A 1 8 FB o e in g 7 3 7 2 0 0B o e in g 7 3 7 3
0 0B o e in g 7 3 7 4 0 0B o e in g 7 3 7 5 0 0B o e in g 7 3 7 7 0
0B o e in g 7 3 7 8 0 0B o e in g 7 3 7 9 0 0
8 .7 80 .5 70 .5 72 0 .03 .4 02 9 .51 5 .31 2 .94 .0 00 .4 30 .4
30 .3 20 .5 00 .6 51 .1 40 .5 00 .4 20 .5 6
T yp eF 1 4F 1 6F A 1 8B o e in g 7 3 7
9 .9 26 8 .21 7 .84 .1 0
C a te g o r yA ir 1 0 0
C la s sF 1 4 AF 1 4 BF 1 4 DF 1 6 AF 1 6 BF 1 6 CF 1 6 DF A 1 8
A CF A 1 8 B DF A 1 8 EF A 1 8 FB o e in g 7 3 7 2 0 0B o e in g 7
3 7 3 0 0B o e in g 7 3 7 4 0 0B o e in g 7 3 7 5 0 0B o e in g 7 3
7 7 0 0B o e in g 7 3 7 8 0 0B o e in g 7 3 7 9 0 0
8 .7 80 .5 70 .5 72 0 .03 .4 02 9 .51 5 .31 2 .94 .0 00 .4 30 .4
30 .3 20 .5 00 .6 51 .1 40 .5 00 .4 20 .5 6
N a t io n a lity U S B e lg iu m D e n m a rk E g y p t In d o
n e s ia Is ra e l N e th e r la n d s N o rw a y P a k is ta n P o
rtu g a l S in g a p o re T a iw a n T h a ila n d V e n e z u e la
B a h ra in G re e c e K o re a T u rk e y U n ite d A ra b . . . C
a n a d a A u s tra l ia K u w a it F in la n d S w itz e r la n d
M a la y s ia I ra n A rg e n t in a C h in a E n g la n d J a p a
n P o la n d G e rm a n y P h il lip in e s M o ro c c o S a u d iA
ra b ia S w e d e n A fr ic a B ra z il F ra n c e S p a in
6 7 .6 0 0 0
0 .2 5 3 0 .9
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0
1 .2 6
P la tfo rmF ig h te rC o m m e rc ia l
9 5 .94 .1 0
Given a-priori state of universe for F-14, F-16, F/A-18 and
Boeing 737 aircraft
Shaded areas (Nationality and Platform) represent where new info
will be inputted
-
9th ICCRTS Sept 2004 paper #141 -12Copyright Lockheed Martin
Maritime Systems and Sensors
A priori CID Bayesian Network (Level 1)BN after new sensor
inputs:
Fighter (0.85)COM Air (0.15)Israel (0.7)US (0.1)Indonesia
(0.1)Spain (0.1)
ID
F 1 4 AF 1 4 BF 1 4 DF 1 6 AF 1 6 BF 1 6 CF 1 6 DF A 1 8 A CF A
1 8 B DF A 1 8 EF A 1 8 FB o e in g 7 3 7 2 0 0B o e in g 7 3 7 3 0
0B o e in g 7 3 7 4 0 0B o e in g 7 3 7 5 0 0B o e in g 7 3 7 7 0
0B o e in g 7 3 7 8 0 0B o e in g 7 3 7 9 0 0
7 .1 10 .4 10 .4 11 7 .34 .0 72 3 .46 .1 01 2 .24 .0 70 .3 00 .3
02 .0 32 .0 33 .0 59 .1 52 .0 33 .0 53 .0 5
T yp eF 1 4F 1 6F A 1 8B o e in g 7 3 7
7 .9 35 0 .81 6 .92 4 .4
C a te g o r yA ir 1 0 0
C la s sF 1 4 AF 1 4 BF 1 4 DF 1 6 AF 1 6 BF 1 6 CF 1 6 DF A 1 8
A CF A 1 8 B DF A 1 8 EF A 1 8 FB o e in g 7 3 7 2 0 0B o e in g 7
3 7 3 0 0B o e in g 7 3 7 4 0 0B o e in g 7 3 7 5 0 0B o e in g 7 3
7 7 0 0B o e in g 7 3 7 8 0 0B o e in g 7 3 7 9 0 0
7 .1 10 .4 10 .4 11 7 .34 .0 72 3 .46 .1 01 2 .24 .0 70 .3 00 .3
02 .0 32 .0 33 .0 59 .1 52 .0 33 .0 53 .0 5
N a t io n a l it y U S B e lg iu m D e n m a rk E g y p t In d
o n e s ia Is ra e l N e th e r la n d s N o rw a y P a k is ta n P
o r tu g a l S in g a p o re T a iw a n T h a ila n d V e n e z u e
la B a h ra in G re e c e K o re a T u rk e y U n ite d A ra b . .
. C a n a d a A u s tra lia K u w a it F in la n d S w itz e r la n
d M a la y s ia I ra n A rg e n t in a C h in a E n g la n d J a p
a n P o la n d G e rm a n y P h il lip in e s M o ro c c o S a u d
iA ra b ia S w e d e n A fr ic a B ra z il F ra n c e S p a in
6 1 .4 2 .0 9 0 .8 9 2 .6 5 0 .3 3 3 .2 0 3 .2 4 0 .8 9 0 .9 4 0
.2 1 0 .6 8 1 .7 8 0 .7 4 0 .2 5 0 .2 6 1 .8 2 2 .2 6 3 .3 4 1 .0 1
1 .6 3 1 .5 1 0 .4 9 0 .7 0 0 .3 7 0 .6 0 0 .8 4 0 .1 8 0 .4 3 0 .4
3 .0 6 5 0 .2 1 0 .8 3 .0 5 6 0 .3 7 0 .1 6 1 .0 4 0 .1 7 0 .6 2 0
.3 7 0 .9 0
P la t fo rmF ig h te rC o m m e rc ia l
7 5 .62 4 .4
-
9th ICCRTS Sept 2004 paper #141 -13Copyright Lockheed Martin
Maritime Systems and Sensors
CID Situational Awareness (SA) Fusion Expansion
Level 1 SA: Perception of the environmental elements – The
identification of key elements of “events” that, in combination,
serve to define the situation
JDL – numeric processing of tactical componentsSA – symbolic
processing of these entities
Level 2 SA: Comprehension of the current situation – This
combines level 1 events into a comprehensive holistic pattern (or
tactical situation)
JDL and SA virtually identicalLevel 3 SA: Projection of future
status – Projection of the current situation into the future, so as
to predict the course of an evolving tactical situation
SA more general than JDL, includes projection of
ownship/aircraft/etc., and friendly intent
-
9th ICCRTS Sept 2004 paper #141 -14Copyright Lockheed Martin
Maritime Systems and Sensors
Tactical Elements Employed by Fusion Level
What?
Level 1: Object Refinement
Where?
Who?
Level 2: Situation Refinement
When?
What if?
Level 3: Threat Refinement
Why?Ph
ysica
l Obj
ects
Even
ts
Thre
at En
viron
men
t, En
emy
Tacti
cs, &
Thr
eat B
ehav
iors
Enem
y doc
trine
,
objec
tives
& ca
pabil
ity
Frien
dly vu
lnera
bilit
ies
and m
ission
s
individual
organizations
Beha
viora
l Obj
ects
tactical elements
local
global
local
global
specific
aggregatedoptions
needs
-
9th ICCRTS Sept 2004 paper #141 -15Copyright Lockheed Martin
Maritime Systems and Sensors
Proposed Threat Evaluation Tool
I&WIndicators & Warnings
Threat Assessmentstate, confidence, rationale, & source
Intent Determinationstate, confidence, rationale, &
source
“Impact” Assessment (Threat Evaluation)
“Intent” Determination (Mission, Activity)
Alert Generation
“Trigger” ThresholdsCID Mission Planning (IPB)
HypothesisManager
Flight plans, FAA updates, ADS-B
Anticipated scenarios, threats and environments
Defensive missions, resources, & assets
Courses of ActionAssessment/
Comprehension
Predictive Profiling
Threat Assess.Assessment/ Comprehension
Impact Modeling
Hypothesis Generation/ Refinement
Hypothesis Generation/ Refinement
Hypotheses on “Intent” (mission, activity, etc.)
Impact Proj.
Track Fusion
CID Fusion
JDL Level 1 Hypotheses
JDL Level 2 Hypotheses
Capability & effectiveness of classDesign mission of
class
Source of class
Source of ID
Goals of ID
Knowledge Base
Initial Hypothesis Generation
Initial Hypothesis Generation
“Mission” Recognition
Object Behaviors “Event”
Recognition
“Object” Aggregation
Domain of Level 3
Fusion
I&WIndicators & Warnings
Threat Assessmentstate, confidence, rationale, & source
Intent Determinationstate, confidence, rationale, &
source
“Impact” Assessment (Threat Evaluation)
“Intent” Determination (Mission, Activity)
Alert Generation
“Trigger” ThresholdsCID Mission Planning (IPB)
HypothesisManager
Flight plans, FAA updates, ADS-B
Anticipated scenarios, threats and environments
Defensive missions, resources, & assets
Courses of ActionAssessment/
Comprehension
Predictive Profiling
Threat Assess.Assessment/ Comprehension
Impact Modeling
Hypothesis Generation/ Refinement
Hypothesis Generation/ Refinement
Hypotheses on “Intent” (mission, activity, etc.)
Impact Proj.
Track Fusion
CID Fusion
JDL Level 1 Hypotheses
JDL Level 2 Hypotheses
Capability & effectiveness of classDesign mission of
class
Source of class
Source of ID
Goals of ID
Knowledge Base
Initial Hypothesis Generation
Initial Hypothesis Generation
“Mission” Recognition
Object Behaviors “Event”
Recognition
“Object” Aggregation
Domain of Level 3
Fusion
-
9th ICCRTS Sept 2004 paper #141 -16Copyright Lockheed Martin
Maritime Systems and Sensors
Conclusions and Future Work
Contextual relationship of information is paramountFusion
process must incorporate these relationshipsCID information wrt
context, time, timeliness, quantity, and quality must be
knownFuture work:
Metrics for information value, completeness, and costs of
decisions can be developed and integratedContextual reasoning
leading to predictive SA
-
9th ICCRTS Sept 2004 paper #141 -17Copyright Lockheed Martin
Maritime Systems and Sensors
Author Information
Tod Schuck is a Lead Member of the Engineering Staff at Lockheed
Martin MS2, Moorestown, NJ. He is the recipient of numerous awards
for his technical work including the ‘01 Lockheed Martin MS2 Author
of the Year, finalist for best paper by OASD C3I at the 7th
International Command and Control Research Technology Symposium
(ICCRTS) ‘02, best paper (2nd place) IEEE National Aerospace and
Electronics Conference (NAECON) ‘00, and a group award winner of
Vice President Al Gore’s “Silver Hammer”Award for Extraordinary
Effort for Changing the Way That Government Does Business (July
‘97) as the technical lead for the Mk 17 NATOSeaSparrow radar SDP.
His areas of expertise are in identification sensor design and
development, fusion algorithm development, information architecture
design; and requirements generation, and testing. He holds a BSEE
from Georgia Tech, an MSEE from Florida Tech, and is pursuing a
Ph.D. from Stevens Institute of Technology in Systems
Engineering.
J. Bockett Hunter is a Senior Member of the Engineering Staff at
Lockheed-Martin MS2, Moorestown, NJ. He has been on the faculty of
Indiana University, worked on Navy operations research problems,
and a wide variety of intelligence systems. His areas of expertise
include algorithm development, systems engineering for very large
systems including system concept definition, requirements
development, design, and testing. He holds a BS in mathematics from
Caltech and an MA in mathematics from Indiana University.
Daniel D. Wilson is a Principal Systems Engineer at
Lockheed-Martin MS2, Burlington, MA. He has worked on Military
Operations Research problems in support of numerous DoD programs.
His areas of expertise include C4ISR systems, operations analysis,
knowledge fusion, predictive situational awareness, dynamic
replanning strategy development, collaborative mission planning,
system effectiveness modeling, decision analysis, risk analysis,
and cost estimation. He holds a BS in Computational Mathematics
from the University of Vermont and an MS in Operations Research
from Stanford University.
[email protected]@lmco.com
[email protected]