-
Multidimensional Analysis, of Quenching: Comparison of Inverse
Techniques
Kevin J. Dowding Sandia National Laboratories
Albuquerque, NM 871 85-0835
Abstract Understanding the surface heat transfer during
quenching can be benefi-
cial. Analysis to estimate the surface heat transfer from intern
a1 temperature measurements is referred to as the inverse heat
conduction prsblem (IHCP). Function specification and
gradiendadjoint methods, which use a gradient search method coupled
with an adjoint operator, are widely used methods to solve the
IHCP. In this paper the two methods are presented for the multidi-
mensional case. The focus is not a rigorous comparison of numerical
results. Instead after formulating the multidimensional solutions,
issues associated with the numerical implementation and practical
application of the methods are discussed. In addition, an
experiment that measured the surface heat flux and temperatures for
a transient experiment is analyzed. Transient temperatures are used
to estimate the surface heat flux, which is compared to the
measured values. The estimated surface fluxes are compa- rable for
the two methods, but computational requirements d Iffer.
Nomenclature specific heat [J lkgC] function specification
regularization method location for temperature sensorj [m]
temperature residual sensor j [ " C] nonhomogeneous term for
boundary surface Ti (whole domain) gradienvadjoint method
convection coefficient [ ~ / ( m 2 " C ) ] boundary condition
coefficient
Tikhonov regularization matrices
number of temperature sensors
objective function 1°C sec]
sum-of-squares term in objective function [ "C sec]
regularization (Tikhonov) term in objective function ["c sec]
thermal conductivity [ W/m°C]
boundary condition coefficient
function space of all "square integrable" functions
number of temporal components for estimated heat flux
2
2
2
outward-pointing unit normal vector
search direction ["C2/( W/m2)m] number of spatial components for
heat flux on [r,] heat flux [ W/m2]
prior information for heat flux [ W/m2]
two-dimensional coordinate vector
number of future time steps objective function sequential
gradiendadjoint method time, initial time, final time [sec]
temperature, initial temperature [ "C]
WLi' W weighting constant, matrix ("C)-'
sensitivity coefficient, matrix[ O C / ( W/m2) 1 measured
temperature [ C] zeroth and first order Tikhonov regularization 1
1/( W/m2)2]
Tikhonov regularization parameter [("C/( W/m2)) l lm]
boundary surface i for domain R
update to heat flux [ W/m2]
time step [ sec]
convergence tolerance
sensitivity function [ ( "c /~ ) ( "c / ( w / ~ * ) ) ~ J
density [kg/rn3]
Rh4S error in estimated heat flux [ W/m2]
basis function, basis function vector
adjoint function I l /m( "C/( W/m2))] two-dimensional domain
scalar product, Eq. (12)
norm, Eq. (13)
2
-
DISCLAIMER
This report was prepared as an account of work sponsored by an
agency of the United States Government. Neither the United States
Government nor any agency thereof, nor any of their employiees,
make any warranty, express or implied, or assumes any legal
liability or responsibility for the accuracy, completeness, or
usefulness of any information, apparatus, product, or process
disclosed, or represents that i ts use would not infringe privately
owned rights. Reference herein to any specific commercial product,
process, or service by trade name, trademark, manufacturer, or
otherwise does not necessarily constitute or imply its endorsement,
recommendation, or favoring by the United States Government or any
agency thereof. The views and opinions of authors expressed herein
do not necessarily state or reflect those of the United States
Government or any agency thereof.
-
DISCLAIMER
Portions of this document may be illegible electronic image
products. Images are produced from the best available original
document.
-
I
Introduction Estimating the conditions at the surface of a
conducting body from internal
measurements is typically called the inverse heat condiiction
problem (IHCP). The terminology inverse is used for this type of
conduction problem because conditions at the boundary or surface of
a body are estimated using internal measurements. Whereas a direct
conduction probl :m uses condi- tions specified on the boundary to
compute the internal temperature. While the direct problem is
generally well-posed, the inverse problem tends to be ill-posed and
very sensitive to measurement errors.
Several methods are applied to solve the IHCP. Function
specification (Beck et al., 1985), Tikhonov regularization
(Tikhonov and Arsenin, 1977), gradiedadjoint methods (Alifanov,
1994, Alifanov et al., 1596, and Ozisik, 1993), and mollification
(Murio, 1993) are more frequently cited methods. However, other
approaches are also applied: dynamic progrmming (Busby and
Truijillo, 1985), Kalman filter (Tuan et al., 1996), Monte Carlo
method (Haji-Sheikh and Buckingham, 1993). In addition, combining
methods is useful. Beck and Murio (1986) formulated a combined
functisn specification and Tikhonov regularization method; similar
concepts are used in Osman et al. (1997). Jarny et al. (1991)
combined a gradienthdjoint method with Tikhonov regularization.
Since this paper focuses on multidimensional prob- lems, the
literature review narrows to the two-dimensional problem. Refer to
books by Alifanov (1994), Beck et al. (1985), Hensel (1991), and
Kurpisz and Nowak (1995) for a comprehensive survey of the
literatu-e.
Several methods applied to the one-dimensional problem have been
extended for the two-dimensional problem. Function specific ition
and gradi- ent/adjoint methods have received the most attention.
Functilm specification specifies a functional form for the heat
flux over a future interval (Beck et al., 1985). Specifying a
functional form over the future interval is a form of reg-
ularization to stabilize the ill-conditioned problem (Lamm, 1995).
In con- junction with specifying a function form, function
specification solves the problem in an efficient sequential
manner.
Several researchers have investigated the two-dimensional
application of the function specification method. It was applied to
estima.e spatially and time varying convective heat transfer
coefficients, Osman and Beck (1989a, 1990), and surface heat flux,
Osman et al. (1997). A boundary element method was coupled with
function specification to investigate multidimen- sional problems
by Zabaras and Liu (1988). Hsu et al. (1992) applied a finite
element method to solve the general two-dimensional problcm with
inverse methods similar to function specification.
Gradienthdjoint methods, which typically apply a conjugate
gradient iter- ative scheme and use an adjoint operator, employ
iterative or Tikhonov regu- larization to stabilize the solution
and solve the multidimeniional problem. Iterative regularization
depends on the slowness or “viscosi .y” of the solu- tion and uses
the iteration index as the regularization parmeter. Several papers
use iterative regularization; see Alifanov and Kerov (1981), Kerov
(1983), and Alifanov and Egorov (1985). Additional inve:,tigations
using gradient/ adjoint methods, but not iterative regularization,
are given in Zabaras and Yang (1996), Reinhardt and Hao (1996a,b)
and Jarny et al.
Others have studied the multidimensional inverse probleni with a
variety of approaches. Tuan et al. (1996) uses a Kalman filter to
delelop an on-line algorithm. A new method, called “direct
sensitivity coefficicnt,” is claimed by Tseng and Zhao (1996) and
Tseng et al. (1996). Pasquetii and Le Niliot (1991) employ Tikhonov
regularization with the boundary element method. An adjoint
approach to compute sensitivities and relate me: sured tempera-
ture to unknown surface conditions is used by Hensel and Hills
(1989). A Monte-Carlo method is given by Haji-Sheikh and Buckingham
(1993). Mol- lification with a space marching technique is used by
Murio (1993b) and Guo and Murio (1991). Busby and Trujillo (1985)
use dynamic program- ming. Transform methods are studied by Imber
(1974, 1975).
While there are several methods and approaches to solve th:
IHCP, distinct advantages or disadvantages of individual methods
are cloudy at best. There
(1991).
have been a limited number of studies to directly compare
methods. Raynaud and Beck (1988) suggested basic test cases to
compare IHCP solutions and compared four methods. The basic test
cases quantify the performance of a method for several important
criteria, suggested by Beck (1979), for compar- ing IHCP methods. A
comparison of several methods using an experimental case is given
by Beck et al. (1996) and Beck (1993). A fortunate outcome of past
comparisons, though they are limited and for one-dimensional prob-
lems, is that the estimated heat flux from different methods does
not differ significantly.
Function specification and gradientladjoint methods are the most
widely used approaches. These two methods are discussed in this
paper. Though a two dimensional numerical comparison using
experimental data is shown, the focus is on application and
implementation issues. In particular I will dis- cuss the numerical
solution and computational requirements, spatial repre- sentation
of the surface heat flux, handling of the nonlinear problems, and
regularization issues. With the previously demonstrated agreement
between different methods, important issues, especially for the
multidimensional case, are those related to getting a solution for
practical problems. By practi- cal I mean a problem that requires
numerical solution, has temperature- dependent properties, and
measurements at a limited number of locations.
Knowledge of the surface heat transfer during quenching can aid
in under- standing the quenching process. In many cases a
one-dimensional solution may not be sufficient to model the
process. Generalizing the methods for the multidimensional case
will allow them to be applied to more practical cases. However, the
multidimensional IHCP is significantly more difficult than the
one-dimensional case. The multidimensional case is more
computationally intensive and ill-posed. The objective of this
paper is to describe and contrast two main methods for solving the
multidimensional IHCP. Several issues that concern the practical
application are discussed. This paper is the first known comparison
of methods for the two-dimensional IHCP.
In the subsequent section a description of the multidimensional
IHCP is given. The following two sections describe solution
methodologies for func- tion specification and gradientladjoint
methods, respectively. A discussion contrasting several aspects of
the two methods is given next. In addition, an experimental case is
considered. The paper concludes with a brief summary.
Problem Description A schematic of the general multidimensional
IHCP is shown in Figure 1.
The transient temperature distribution inside a multidimensional
region is described by the heat conduction equation:
9 (1) aT(r, t ) ( r ) in R v . ( k ( T ) V T ( r , t ) ) =
pcp(T)-
at ’ ( t , < t < r , ) with the boundary conditions
Figure 1. Schematic of multidimensional general IHCP
-
( r ) o n r i , ( i = l , 2 , 3 ) 9 ( 2 4 a -k . -T(r, t ) + h i
T ( r , t ) = f i ( r , t ) ,
I afi ( to < t I t 1 )
and the initial condition T ( r , to) = To('), ( r ) in (Q u r).
(2c)
The thermal conductivity k(T) and volumetric heat capacity
pc,(T) are assumed to be temperature dependent. The spatial domain
R has boundaries represented with symbols ri, (i =1, 2, 3, 4). The
boundary conditions in Eq. (2a) are, for generality, the first,
second, and third kind (i=I, 2, and 3, respectively). The boundary
coefficients k; and hi are specified to form the correct boundary
condition -- e.g., kl = 0 and hl = 1 specifies a temperature
boundary condition (first kind); k2 = k(T) and h2 = 0, a flux
condition (sec- ond kind); and k3 = k(T) and h3 = h(r; T), a
convective condition (third kind). The outward-pointing normal
vector is denoted li ; the heat flux leaving a surface is
positive.
The thermal properties (kpc,), boundary conditions f&, arid
initial condi- tion (TO) are assumed to be known. The heat flux
q(
-
mon choice. The estimated vector is retained only for the first
time interval tm Then time index rn is increased by one time step,
and the solution process is repeated by marching in time until the
last sequential interval. Retaining more than one component is
possible, but has not been extensively studied.
In Eq. (7a) the temperature and sensitivity are needed. The
original nonlin- ear temperature problem in Eqs. (1) and (2) is
linearized in the sequential implementation. Temperature-dependent
parameters are evaluated at the ini- tial temperature. Parameter
variation on account of transient temperature change during the
sequential interval is neglected; parameters can vary spa- tially
with temperature. Evaluating the parameters at the initial
temperature is referred to as quasi-linearization. After
quasi-linearizing, T(q*) is assem- bled from the solution of the
following problem.
with the boundary conditions
In Eq. (9c) p,,, - l ( r ) is the computed temperature at time t
, - when qm-] is estimated (the previous sequential interval).
Sensitivity coefficients are the first derivative of temperature
with respect to the unknown heat flux vector qm- There are P
spatial components in this vector, and sensitivity to each
component is solved for independently. The sensitivity equations
can be derived by differentiating Eqs. (I) and (2) with respect to
qkm after substituting the approximation for the heat flux in Eq.
(4) and evaluating the thermal properties at the initial
temperature. The sensi- tivity equations for spatial component k
are given next; the kth column in X is assembled by solving these
equations.
Sensitivity Coefficient Equations.
with the boundary conditions
and the initial condition Xk(r,tm-l) = 0, ( r ) i n ( R u r ) .
(1 IC)
There are P sensitivity equations, k = 1, 2, ..., P. The kth
sensitivity problem in Eqs. (IO) and (1 1) is exactly the same as
the
temperature problem in Eqs. (8) and (9) with three
simplifications. First, the
initial condition for all sensitivity equations is zero. Second,
the heat flux dis- tribution q* in Eq. (9b) is replaced by the kth
basis function $,Js) in Eq. (1 1 b). Third, the known boundary
conditions in Eq. (9a) are homoge- neous for the sensitivity
equation, Eq. (1 la).
An alternative to deriving sensitivity equations, as done here,
is to use a finite difference approximation of the derivative. The
sensitivity equation method is typically more accurate than the
finite difference approximation of the sensitivity coefficients,
Beck and Arnold (Chapter 7, 1977) and Black- well et al. (1998).
The sensitivity equation approach removes the dependence on the
numerical step size of the finite difference approximation of the
deriv- ative. In situations that require significant effort to
solve the sensitivity equa- tions the finite difference
approximation may be adequate and much less work to implement. Care
must be used to guard against numerical errors when using a finite
difference approximation, however. Blackwell et al. pro- vide a
detailed discussion of deriving sensitivity equations for heat
conduc- tion problems and their solution.
GradienVAdjoint Method Gradientkidjoint methods, which couple a
gradient search method with an
adjoint equation approach, are growing in popularity. These
methods are more mathematically based. I will try not to get too
involved in the mathe- matics while describing the methods.
Completely avoiding the mathematics is not possible or appropriate,
however.
A sequential implementation of the gradientkidjoint method is
not the usual approach. It is a relatively recent implementation
(Dowding, 1997; Dowding and Beck, 1998; Reinhardt and Hao, 1996a,b;
and Arytukhin and Gedzhadze, 1994). A more common implementation
considers the entire time range simultaneously, referred to as
whole domain. Dowding (1997) and Dowding and Beck (1998) compare a
whole domain and sequential implementation for a linear problem
(constant thermal properties). Computa- tion requirements for a
sequential implementation are shown to be greater than whole domain
in many cases for the linear problem; estimated heat flux is
comparable. The nonlinear problem has not been studied, but a
sequential solution might have potential.
A sequential implementation, including quasi-linearization, as
discussed in the previous section, is discussed in this section for
the gradientkidjoint method. The method described is referred to as
a sequential gradienthdjoint method (SGAM). Comments on the whole
domain solution are given near the end of this section. In future
discussions I refer to this method as a whole domain
gradientkidjoint method (GAM).
Spatial-dependent heat flux approximation. In contrast to the
FSRM, no assumptions are required about the specific functional
form of the unknown heat flux to formulate an inverse solution
using gradientladjoint methods. Schemes to minimize the objective
function J ( q ) (as defined and discussed next), which use
iterative methods, such as steepest descent or conjugate gradient,
require the gradient of J ( q ) . Methods to compute this gradient
depend on the function space where q(r, t ) is assumed to reside.
Two possibilities are a finite-dimensional space and an
infinite-dimensional space. The approximation of heat flux for the
FSRM in the previous section is finite-dimensional. Characteristics
are assumed (a priori) about the heat flux. For the
infinite-dimensional problem a priori information is not required
concerning the (unknown) function q(r, t) . However, two addi-
tional problems, which are the adjoint and sensitivity problems are
required. For the special case when a priori information is
available concerning the function -- or assumed, as with FSRM - the
problem is considered finite- dimensional and standard differential
calculus can be used to compute the gradient. Lamm (1990) provides
a detailed description of the differences in the formulations when
heat flux is finite versus infinite-dimensional.
The analysis considered here is the more general
infinite-dimensional problem. The heat flux is assumed to be in the
function space Lz, all square
-
integrable functions on r4 x ( I , , t , + - I ) . In this case
the scalar product is defined by
for arbitrary functions Zl(r,t) and Z*(r,f). The associated ncrm
of function Z(
-
(VJ(q"), VJ(q"- ' ) - VJ(q"))L* II VJ(q" - ,nZ,
p"=
See Eq. (12) and Eq. (13) for the definition of ( , )L2 and I l
l L 2 . 49. Solve the sensitivity problem for e(r, t )
e(r, 0) = 0, ( r ) in R . ( 2 6 ~ ) 4ii). Evaluate the optimal
step size 0"
j = 1
5.Compute the improved value for q
( r ) on I y 4 q"+l(r , t ) = q"(r , t ) -p"p"(r , t ) ,
,(28)
( t , - 1 < f 5 f,, + - 1 1 6. Check for convergence of the
estimated heat flux
(29) 2
If convergence has not been obtained, let n = n + 1 and return
to Step 2 with the updated heat flux. If convergence has been met,
m w e to the next sequential interval.
The describing equations for the direct, sensitivity, and
adjoint problem have a similar form. The differential equations and
boundary conditions have the identical forms. Differences between
the three problems a-e: (1) The sen- sitivity and adjoint problem
have homogeneous known boundary conditions (Eq. (224 and Eq.
(26a)). 2) The sensitivity problem's driving term is the search
directionp"(r,f) on surface r4 (Eq. (26b)). (3) The adjoint
problem's driving term is the residual (Eq. (21)). (4) The
sensitivity has ;I specified zero initial condition (Eq. (26c)).
(5) The adjoint problem has a specified zero final condition (Eq.
(22c)).
A whole domain solution is mentioned previously. If the IHCP in
Eqs. (1) and (2) is linear (constant properties), the whole domain
gradient method is obtained by lengthening the time interval for
the sequential formulation pre- sented. Apply the sequentid
solution over (to < f 5 lf) , instead of ( tm-] < t I f m + r
- l ) , for the whole domain method. Jamy et al. (1991) also give
the formulation for the linear problem using the whde domain gra-
dient method. Extending the whole domain gradient methods for
nonlinear problems is discussed in Artyukhin (1996) and Loulou et
al. (1996). Though the equations are similar to those for a linear
problem, the solution of a non- linear partial differential
equation (PDE) is required. All PDEs are linear for a sequential
implementation using quasi-linearization.
Ilq.n+ 1 - 4 n llL2 < E .
Results and Discussion Several issues related to the
implementation and practical application of
inverse methods are discussed. I will discuss the function
specification regu-
larization method (FSRM) and sequential gradientladjoint method
(SGAM). Both methods are formulated in the previous two sections.
(In addition, dis- cussion of a whole domain gradientladjoint
method (GAM) is given to con- trast it with the SGAM.) The goal is
to highlight aspects of the methods and indicate differences. This
information may help indicate when it is advanta- geous to choose
one method over the other. Many of the issues may be in a grey
area. Nevertheless, it is important when applying the methods to
under- stand their limitations and the underlying assumptions.
Numerical Solution and Computational issues. The inverse
solutions formulated for the FSRM and SGAM require numerical
solution for practical cases, including irregular geometry,
multiple materials, temperature depen- dent properties, etc. The
PDEs shown for the solution methodologies pre- sented in the
previous sections can be solved using any of several numerical
techniques, such as finite element, finite difference, control
volume finite ele- ment, or boundary element.
Two approaches have been used to take an existing numerical
solver -- for example a general finite element code -- and combine
it with inverse tech- niques to create a general inverse code. The
first approach takes the existing code and modifies it to be a
subroutine (Osman and Beck, 1989b). The sub- routine becomes an
integral aspect of the inverse code and is called to com- pute
direct solutions as needed. An alternate approach combines an
existing numerical code with an inverse code but external to the
codes. A general driver (Eldred et al., 1996) that provides such a
code-to-code communication calls it Reusable Interface Technology
(RIT). RIT has been successfully applied for parameter estimation
(Blackwell and Eldred, 1997). It allows both codes (inverse and
numerical solver) to be developed independently. In the former
approach when the numerical code is converted to a subroutine, it
usually requires significant modification. The modifications
typically sever the link with the original numerical solver code.
Hence future updates in the numerical solver cannot be implemented
without effort to modify the code according to the subroutine
structure. A main advantage of RIT is that it does not have this
problem.
Both inverse methods require the solution of several PDEs.
However, as previously discussed, there are similarities between
the PDEs. The similarity allows the same numerical solver to be
used to solve all PDEs. It also permits possible computational
savings by storing certain matrices and reusing them to solve other
PDES. To store these matrices requires access to the details of the
solver. If RIT is used, it may not be possible to access these
matrices. Issues of computational savings are not discussed further
here. See Osman et al. (1997) and Dowding (1997) for a discussion
of computational savings when solving with FSRM and SGAM.
Of possibly more significance to the computational requirements
is the number of PDEs that must be solved. (Minor differences in
the PDEs are ignored, and all PDEs are assumed to require similar
effort to solve.) In the FSRM, a PDE for temperature and P PDEs for
sensitivity are solved, where P is the number of spatial parameters
approximating the heat flux on r4. Hence, the computational
requirements increase with the spatial discretiza- tion of the heat
flux for FSRM. In contrast the SGAM solves three PDEs (direct,
adjoint, and sensitivity) regardless of the spatial discretization
of the heat flux. The three problems are solved iteratively,
however. The trade-off is solving P i 1 problems one time for the
FSRM or three problems iteratively for the SGAM. As more spatial
components are estimated, the SGAM may gain a computational edge
over FSRM. Because conjugate gradient search methods are efficient
and converge in a few iterations, SGAM is more com- putationally
efficient than FSRM. The required iterative solution for SGAM does
not increase computational expense as much as the large number of
sen- sitivity problems required for FSRM.
Solving several PDEs for each method requires care to ascertain
the effect of discretization errors. Although the solution of one
PDE -- for example temperature -- may be insensitive to the
discretization, the solution for other PDEs may not be insensitive.
The discretization required for one PDE may be different from the
discretization required for other PDEs. This is because the
solutions for different problems vary in the locations where
gradients are
-
large. Consequently, the PDEs may require different
discretization to capture the gradients and accurately predict the
solution. Users shoidd investigate this point.
Sequential and Quasi-Linearization vs. Whole Domain. A
sequential implementation of the two inverse methods is used. In
conjunction with a sequential method, quasi-linearization can be
used. Quasi-linearization refers to the process of temporarily
linearizing the problem by evaluating tempera- ture-dependent
quantities at the initial temperature of a sequ :ntial interval. An
alternative to the sequential method is a whole domain apl~roach.
Whole domain means the entire time domain (to, ff) is considered.
Heat flux is estimated for all time and spatial locations
simultaneously.
It is commonly accepted that a sequential method is more
c:fficient than a whole domain approach for function specification
methods. It 1 s far less clear for the gradiendadjoint methods
whether a sequential method is more effi- cient; further
investigation is needed. There are several supporing reasons to
consider a sequential implementation.
1. The physics indicate a sequential process; the describing
equations for the IHCP are parabolic in time. Consequently,
temperature/heat flux at a much later time should not influence
temperatureheat flux at 5 n earlier time. Simultaneously solving
for all time, 1s done in a whole domain solution, allows late time
estimates to influence the early time estimates
2. The final time is arbitrary. The time selected to end the
analysis should not be influential on the estimated heat flux. An
estimation in “real time” requires a sequential implementation.
3. Less computer memory is needed in a sequential
implementation. Cases with temperature-dependent properties require
saving the temperature for the entire time and space domain in a
whole domain implementati m.
4. Computational requirements increase linearly as the time
domain is increased for a sequential implementation. Analysis for
100 time steps requires approximately twice as much time as 50 time
steps. A whole domain implementation increases the number of
components simultaneously estimated as the time domain is
increased. Conceptually, an increase in the time domain for a whole
domain method results in solving ,I larger set of simultaneous
equations. As this set gets large, the computational increase for
the whole domain is unlikely to be linear.
A separate issue from the whole versus sequential solution is
the concept of quasi-linearization; it is only appropriate for a
sequential solution. The idea is to evaluate the properties at the
initial temperature, thereby linearizing the problem. Then a
nonlinear solution is not required for b e sequential interval.
Though there may be special cases that require a nonlinear solution
on a sequential interval, in most cases it is not necessary. Sevei
a1 reasons are cited. First, thermal properties are typically not
known to an accuracy suffi- cient to warrant iteration. Second, the
estimated surface heat flux depends on regularization parameters
(discussed below). It is well known that the esti- mated heat flux
varies depending on these parameters. Criteri2 to select the
parameters are based on generally unknown measurement o rrors.
Conse- quently, with all the uncertainty due to other factors, a
non1inc:ar solution is unlikely to improve the true accuracy of the
estimated heat flux. Simulated cases with highly nonlinear thermal
properties have demonsirated that the quasi-linearization process
does not adversely affect the estimated heat flux (Beck et al.,
1982 and Osman et al., 1997).
Quasi-linearization is recommended for the SGAM as well. Though
SGAM requires iteration already, for the reasons previously
specified, the problem should not be treated as nonlinear. The
computational requirements to solve nonlinear PDEs are greater than
those for the linear PDEs, which result from
quasi-linearization.
Infinite- vs. Finite-Dimensional. In some publications the
iiifinite-dimen- sional representation of the heat flux for
gradient methods is touted as a major advantage.
Infinite-dimensional means heat flux is not Fanmetenzed. It is
assumed to be a function. and no other approximations about the
unknown flux are introduced. In the FSRM, an a prior[ approx mation
of the
.OM
, composite specimen /
mica heater
assembly
7.62 (3.00) I- AU dimensions in cm (in.) * thermocouple ra
Active heater
(NOT DRAWN TO SCALE) eB Inactive heater Figure 2. Experimental
configuration with measured transient temperature and heat flux
heat flux is needed. To numerically solve the IHCP with an
infinite-dimen- sional heat flux, as presented for the SGAM, the
heat flux is made finite- dimensional (discretized) during the
numerical solution -- that is, a numeri- cal approximation of the
infinite-dimensional heat flux is introduced -- thus making it
finite-dimensional. For example, using an element-based numeri- cal
method, the spatial heat flux may be assumed constant along an
element boundary.
In many cases exactly the same numerical approximation of the
heat flux can be used for the infinite-dimensional (SGAM) and
finite-dimensional (FSRM). However, the infinite-dimensional
inverse formulation -- i.e., the number of problems solved -- is
not dependent on the spatial approximation. Regardless of the
numerical approximation, the same (three) problems are solved. This
is not true for the FSRM. The numerical approximation of the heat
flux influences the inverse formulation and number of problems to
solve. The distinction between finite and infinite-dimensional is
more a com- putational issue than an approximation issue.
Regularization. Both FSRM and SGAM require selecting the
magnitudes of one or more regularization parameters. A whole domain
method requires fewer regularization parameters than a sequential
solution because r is not needed. To select the proper magnitude of
the regularization parameter selec- tion, criteria are used. One
criteria is called the residual principle (Alifanov, 1994). It
suggests the sum-of-squares function should be decreased to the
expected level, which is based on errors in the measurements.
Typically, these errors are unknown and must be estimated.
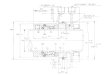
Experimental Case. The schematic of an experimental set-up,
which was used to estimate the thermal properties of the
carbon-carbon composite mate- rial, is shown in Figure2. By
measuring the transient temperatures and power supplied to the mica
heater assembly, the thermal properties (orthotro- pic thermal
conductivity and volumetric heat capacity) of a carbon-carbon
composite were measured, Dowding et al. (1995, 1996). In this paper
using the same experimental data, the opposite problem is
considered; the surface heat flux is recovered using the measured
thermal properties and transient temperature measurements. A
two-dimensional surface heat flux is esti- mated. Dowding et al.
(1995) describes the one-dimensional case.
The thermal model of the experimental set-up is shown in Figure
3. All outer surfaces are assumed to be adiabatic, except the
surface where the energy is introduced by the heater. The energy to
the heater is assumed to divide equally between the two symmetric
halves and emanate from the mid-
-
v l
y5 '4 (5.08-6.35) 43
- 1 (0-1.27) 42
1 (1.27-2.54) (2.54".81)(3.81-5.08) (6 35-7.62)
Figure 3. Thermal model of experimental configuratic'n (origin
is at left face between composite specimen and mica heater
;issembly)
dle of the heater assembly (y = -0.042 cm); see Figure 3. The
heater assem- bly contains three independently controlled heaters.
Only one of the three heaters is energized (active heater in Figure
2, the other two heaters are iden- tified as inactive). The
measured temperatures are averaged on opposite sides of the heater
assembly to determine the temperature at each location. The sensors
are located along y = 0.0 cm at x = 0.89, 1.91, 3.13,4,45, and 6.73
cm and along y = 0.91 cm at x = 1.27 and 6.35 cm.
The numerical solution for this problem uses 21 nodes along the
x-direc- tion for all materials. In the y-direction there are 2
nodes across the mica heater, 11 nodes across the composite, and 11
nodes across the insulation. A numerical time step of 0.64 seconds,
which is the same as 1 he measurement time step, is used. Because
effective properties have been estimated for the mica heater, the
interface between the heater and composite is modeled with perfect
contact. Different numerical solvers are used for the FSRM and
SGAM. A finite element code is used for FSRM. The mesh is shown in
Figure 3. A finite difference-based method with a similar
discretization as the finite element mesh is used for the SGAM.
Although the mica heater is quite thin (0.42 mm), because its
properties include the contact resistance between the heater and
the c a ~ boncarbon, it is thermally significant. Based on the
effective properties of the mica heater, the dimensionless time
step (Fourier number) based on the depth of the tem- perature
sensors nearest the surface is 0.23. A dimensionless time step in
this range does not represent a difficult one-dimensional IHCP;
nowever, in two- dimensions with a limited number of sensors, the
difficulty is increased.
An important issue in the study of the multidimensional HCP is
defining the spatial representation of the (unknown) heat flux. A
general rule sug- gested for the FSRM is that the number of spatial
components should not exceed the number of sensors. If more
components than this are estimated, additional regularization is
typically required to stabilize t ie solution. The parameterization
for the FSRM is shown in Figure 3. Six equally spaced seg- ments
over which the heat flux is uniform are used (the x-range of each
heat flux component is shown in Figure 3). For the SGAM a general
approxima- tion is used that assumes heat flux is constant over
each nodid surface; a total of 21 spatial components define the
heat flux for SGAM.
The measured surface heat flux is shown in Figure 4a. It has a
step change in time and with position. Thermal properties are
assumed tc be constant; the experiment considered has a maximum
temperature change of 25 "C . The heat flux is estimated using FSRM
and SGAM. In addition, heat flux esti- mated with a whole domain
gradienthdjoint method (GAM) is included. For constant thermal
properties the GAM formulation is the satr e as the SGAM, except
the time range is extended to cover the whole timi: domain. In all
cases the residual principle (Alifanov, 1994) is used to select the
number of future time steps and Tikhonov parameter. Only zeroth
ord:r regularization
is used. An approximation of the measurement error, which is
required for the residual principle, is estimated by comparing
temperature measurements across the symmetry plane (Dowding,
1997).
TABLE 1. Estimation results for two-dimensional IHCP with
experimentally measured heat flux
I .5 E-06
660 FSRM(r=6) I FEh4 I 6 1 1.5E-06 I 7000 I 330 The heat flux
distribution estimated with FSRM is shown in Figure 4b.
Estimated heat flux using the gradientkidjoint methods are shown
in Figure 4c for SGAM (sequential) and Figure 4d for GAM (whole
domain). Table 1 identifies the direct method used to solve PDEs,
number of spatial heat flux components, Tikhonov parameter,
computational time, and RMS error between the measured and
estimated heat flux.
FSRM more accurately predicts the measured heat flux. It has a
RMS error (final column of Table 1) approximately one-half of that
for SGAM and GAM. It is, however, fortuitous that the heat flux
parameterization (Figure 3) coincides with the spatial dependence
of the measured heat flux; only six spatial components are
estimated. The SGAM and GAM have similar esti- mates of the heat
flux. In both gradient methods the estimated flux spatially smooths
the sharp step more than the FSRM. But 21 spatial components are
estimated for the gradient methods. Although not shown, improved
accuracy in the estimated heat flux is obtained if the same six
spatial components defined for FSRM are estimated with the SGAM
(and GAM); an RMS m o r in the estimated heat flux is comparable to
the that for the FSRM.
There is a trade-off. It is possible to estimate many spatial
components with reduced accuracy or fewer components with improved
accuracy, assum- ing an appropriate spatial distribution can be
selected. In many situations selecting the appropriate spatial
distribution will be difficult. An advantage of the gradienthdjoint
methods is the flexibility with regard to the spatial distribution.
This flexibility does not give more information than the
measurements provide, however. The spatial distribution can be
estimated in this case because sensors are located along the entire
surface. (I don't believe FSRM could estimate 21 spatial components
as SGAM and GAM did. Because of program limitations this could not
be investigated.)
There is a big difference in the computational time. The SGAM
(sequen- tial) requires nearly double the computational time of the
GAM (whole domain). For linear problems that do not require a
sequential solution, GAM is often computationally superior to SGAM.
A detailed explanation of this point, as well as suggested
improvements for the SGAM, are given in Dowd- ing (1998). A
comparison for the nonlinear case is needed; the SGAM is
anticipated to be competitive for this case.
The gradient methods (SGAM and GAM) require on the order of 100
sec- onds, whereas FSRM requires on the order of 7000 seconds
(Column 5 of Table 1). These computational times cannot be directly
compared because different direct solvers are used. The gradient
methods employ an alternating direction implicit (ADI) finite
difference method, which typically is much faster than the finite
element method ( E M ) used for FSRM. To understand the
computational difference, the time required to obtain one direct
solution with comparable numerical conditions is conducted. The AD1
method required 3.6 seconds, whereas the FEM required 110 seconds;
a factor of 30. This difference indicates that the gradient methods
are more computationally efficient because the inverse solution
required a factor of 70 more computa- tional time. Furthermore,
FSRM only estimated 7 components, compared to 21 for the SGAM.
Computational costs for FSRM would further increase as more spatial
components are considered.
-
a) Measured Surface Heat Flux
e) Sequential GradienUAdjoint method (SGAM, r = 6)
... . . . . . . . . . . . . . ........... ......... . . . . .
.... . . . . . . . . . . . . . . . . . . . . . . . : ’
. . -‘1 : : :.. . . . .
120\ -
Figure 4. Numerical results from the experimental case: a)
experim flux, c) SGAh4 estimated heat flux with r =6, and d) Whole
domain L
Summary Methods to solve the multidimensional IHCP based on
fiwtion specifica-
tion and gradientladjoint methods were discussed. Tikhonciv
regularization was included to stabilize both methods. Several
issues associated with imple- menting the methods for practical
problems, including the numerical solu- tion, approximation of the
estimate surface heat flux, and computational requirements, were
discussed. Computational requirements for FSRM may be larger than
SGAM and GAM for multidimensional cases, particularly when many
spatial components are estimated. An experime ita1 case demon-
strated that the methods provide comparable estimated heat flux. In
this example computational requirements are greater for the
function specifica- tion method than the gradientladjoint
method.
Acknowledgments The insights and comments from Ben Blackwell and
James Beck are
appreciated. Sandia is a multiprogram laboratory operated by
Sandia Corporation, a Lockheed Martin Company, for the United
States Depart- ment of Energy under Contract
DE-AC04-94AL8.5000.
b) Combined Function Specifcation Regularization Method (FSM, r
= 6)
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .... . . . . . . . . . . . .., .
I . . . . . . . . . . . . . . . . . : . :
69 l(seconds)
0 -0
d)Whole Domain Gradient Adjoint Method (GAM)
0 0
tally measured surface heat flux, b) FSM estimated surface heat
imated heat flux
References Alifanov, 0. M., Artyukhin, E. A., and Rumyantsev, S.
V., 1996, Extreme Methods for
Solving III-Posed Problems with Applications to Inverse Heat
Transfer Problems, Begell House Inc., New York.
Alifanov, O.M., 1994, Inverse Heat Transfer Problems,
Springer-Verlag, New York. AIifanov, 0. M. and Egorov, Y. V., 1985,
“Algorithms and Results of Solving the
Inverse Heat Conduction Problem in a ’Tho-Dimensional
Formulation,” Journal Engineering Physics, Vol. 48, No.
4,489-4%.
Alifanov, 0. M. and Kerov, N. V., 1981, “Determination of
External Thermal Load Parameters by Solving the Two-Dimensional
Inverse Heat-Conduction Problem,” JournalEngineering Physics, Vol.
41, No. 4, 1049-1053.
Artyukhin, E. A., 1996, “Account for Smoothness when Estimating
Temperature- Dependent Thermophysical Characteristics,” Proceeding
of the Second Interna- tional Conference on Inverse Problems in
Engineering: Theory and Practice, eds. D. Delaunay, K. Woodbury,
and M. Raynaud, 9-14 June 1996, LeCroisic, France, ASME Engineering
Foundation.
Artyukhin, E. A., and Gedzhadze, 1. Yu., 1994, “Sequential
Regularization Solution of a B o u n d q Inverse Heat Conduction
Problem,” 2nd Joint Russian-America Work- shop on Inverse Problems
in Engineering, August 1994, St Petersberg, Russia.
Bass, B. R., 1980, “‘Application of the Finite Element Method to
the Nonlinear Inverse Heat Conduction Problem using Beck‘s Second
Method,” ASME Journal Heat Transfer. Vol. 102. pp. 168-176.
-
Beck, J. V., Blackwell, B., and Haji-Sheikh, A., 1996,
“Comparison of some inverse heat conduction methods using
experimental data,” Intematior!al Journal of Heat and Mars
Transfer, Vol. 39, No. 17, pp. 3649-3657.
Beck, J. V., 1993, “Comparison of the Iterative Regularization
and Function Specifica- tion Algorithms for the Inverse Heat
Conduction Problem,” Imerse Problems in Engineering: Theory and
Practice, eds. N. Zabaras, K. Woodbury and M. Raynaud,
ASME.Engineering Foundation.
Beck, J. V. and Murio, D. A,, 1986, “Combined Function
Specifica.ion-Regularization Procedure for Solution of Inverse Heat
Conduction Problem:’ AIAA, Vol. 24, No.
Beck, J.V.. Blackwell, B.,and St. Clair, C.R., 1985, Inverse
Heat Conduction, Wiley, New York
Beck, J. V., Litkouhi, B., and St Clair, C. R., 1982, “Efficient
Sequential Solution of the Nonlinear Inverse Heat Conduction
Problem,” Numerical ,Yeat Transfer, Vol.
Beck, J. V., 1979, “Criteria for Comparison of Methods of
Solution of the Inverse Heat Conduction Problem,” Nuclear
Engineering and Design, Vol53, pp. 11-12.
Beck. J.V. and Arnold, K.,1977, Parameter Estimation in
Enginemkg and Science, Wiley, New York.
Blackwell, B. F., Cochran, R. J., and Dowding, K. J., 1998,
“Development and Imple- mentation of Sensitivity Coefficient
Equations For Heat Conliuction Problems,” ASME proceedings of the
7th A I M A S M E Joint Thermophysics and Heat Trans- fer
Conference, Vol. 2, eds. A. Emery et al., ASME-HTD-357-:?. pp.
303-316.
Blackwell, B. F., and Eldred, M. S., 1997, “Application of
Reusable Interface Technol- ogy for Thermal Parameter Estimation,”
Proceeding of the 32nd National Heat Transfer Conference, Vol. 2,
eds. G. S . Dulikravich and K. E. Woodbury, Balti- more MD,
HTD-Vol340, (New York ASME), pp. 1-8.
Busby, H.R. and Trujillo, D.M., 1985, “Numerical Solution to a
Two-Dimensional Inverse Heat Conduction Problem,” International
Journal for lfumerical Methods in Engineering, Vol. 21, pp.
349-359.
Dowding, K. J., 1998, “A Sequential Gradient Method for the
Inverse Heat Conduction Problem OHCP),” ASME Journal of Heat
Transfer, in review.
Dowding, K. J., 1997, “Multi-Dimensional Estimation of Thermal
.?roperties and Sur- face Heat Flux using Experimental Data and a
Sequential Gradient Method,” Ph.D. Dissertation, Michigan State
University, East Lansing, N.I.
Dowding, K., Beck, J., Ulbrich, A., Blackwell, B., and Hayes,
J., 1!)95, “Estimation of Thermal Properties and surface Heat flux
in a Carbon-carbon Composite Mate- rial,” Journal of Thermophysics
and Heat Transfer, Vol. 9, No. 2, pp. 345-351.
Dowding, K., Beck, J., Ulbrich, A,, Blackwell, B. and Hayes, J.,
1!95, “Estimation of Thermal Properties and surface Heat flux in a
Carbon-carbon Composite Mate- rial,” Journal of Thermophysics and
Heat Transfer, Vol. 9, No. 2, pp. 345-351.
Eldred, M. S.. Outka, D. E., Bohnhoff, W. J., Witkowski, W. R.,
Rornero, V. J., Ponslet, E. R., and Chen, K. S., 1996,
“Optimization of Complex Mechanics Simulations with Object-Oriented
Software Design,” Computer Modeling and Simulation in Engineering,
Vol. 1, No. 3, pp. 323-352.
Guo, L. and Murio, D., 1991, “A Mollified Space-Marching
Finite-Difference Algo- rithm for the Two-Dimensional Inverse Heat
Conduction Problam with Slab Sym- metry,” Inverse Problems, Vol. 7,
pp. 247-259.
Haji-Sheikh, A. and Buckingham, F.P., 1993, “Multidimensional
Inverse Heat Conduc- tion Using the Monte Carlo Method,” ASME
Journal Heat Transfer, Vol. 115, pp.
Hensel, E., 1991, Inverse Theory and Applications for Engineers,
Prentice-Hall, New Jersey.
Hensel, E. and Hills, R., 1989, “Steady-State Two-Dimensional
Iwerse Heat Conduc- tion,” Numerical Heat Transfer; Part B, Vol.
15, pp. 227-240.
Hsu, T., Sun, N. G., Chen, G. G., and Gong, Z., 1992, “Finite
element formulation for two-dimensional inverse heat conduction
analysis, ASME Joumd Heat Transfer,
Imber, M., 1975, ‘Two-Dimensional Inverse Conduction Problem -
Further Observa- tions,”AL4A Journal, Vol. 13,No. 1,pp.
114-115.
Imber, M., 1974, ‘Temperature Extrapolation Mechanism for
Two-Dimensional Heat Flow,”AIAA Journal, Vol. 12, No. 8, pp.
1089-1093.
Ingham, D.B. and Yuan, Y., 1994, The Bounda~y Element Methodjor
Solving Improp- er1.v Posed Problems, Computational Mechanics,
Southampton U.K.
Jarny, Y., Ozisik, N. M., and Bardon, J. P., 1991, “A General
Optimization Method Using Adjoint Equation for Solving
Mulitdimensional Inverse Heat Conduction,” International Journal
Hear and Mass Transfer, Vol. 34, No. 11, pp. 291 1-2919.
Kerov, N.V., 1983, “Solution of the Two-Dimensional Inverse Hea:
Conduction Prob- lem in Cylindrical Coordinate System,” Journal of
Engineering Physics, Vol. 45, No. 5. pp. 1245-1249.
Kurpisz. K. and Nowak, A.J.. 1995, Inwerse Thermal Problems,
Computational Mechanics. Southampton. U.K.
1, pp. 180-185.
5, pp. 275-286.
26-33.
VO~. 114, pp. 553-557.
Lamm, P. K., 1995, “Future-Sequential Regularization Methods for
Ill-Posed Voltern Equations: Applications to the Inverse Heat
Conduction Problem,” Journal Math. Analysis and Applications, Vol.
195, pp. 469-494.
Lamm, P. K., 1990, “Regularization and the Adjoint Method of
Solving Inverse Prob- lems,” Lectures given at 3rd Annual Inverse
Problems in Engineering Seminar, Michigan State University, East
Lansing, MI, 25-26 June 1990.
Loulou, T., Artyukhin, E. A,, and Bardon, J. P., 1996,
“Estimation of the Time-Depen- dent Thermal Contact Resistance at
the Mold-Casting Interface,” Proceeding of the Second International
Conference on Inverse Problems in Engineering: Theory and Practice,
eds. D. Delaunay, K. Woodbury, and M. Raynaud, 9-14 June 1996,
LeCroisic, France, ASME Engineering Foundation.
Murio, D.A., 1993a, The Mollification Method and the Numerical
Solution of Ill-Posed Problems, Wiley. New York
Murio, D., 1993b, “On the Numerical Solution of the
Two-Dimensional Inverse Heat Conduction Problem by Discrete
Mollification:’ Proceeding of the First Intema- tional Conference
on Inverse Problems in Engineering: Theory and Practice, eds. N.
Zabaras, K. Woodbury, and M. Raynaud, 13-18 June 1993, Palm Coast,
FL, ASME Engineering Foundation, Florida, pp. 17-2 1.
Osman, A. M., Dowding, K. J., and Beck, J. V., 1997, “Numerical
Solution of the Gen- eral Two-Dimensional Inverse Heat Conduction
Problem (IHCP),” ASME Journal of Heat Transfer, Vol. 119, pp.
38-45.
Osman, A. M. and Beck, J. V., 1990, “Investigation of Transient
Heat Transfer Coeffi- cients in Quenching Experiments,” ASME J o u
m l Heat Transfer, Vol. 112, pp. 843-848.
Osman, A.M. and Beck, J.V., 1989a, “Nonlinear Inverse Problem
for the Estimation of Time-and-Space Dependent Heat Transfer
Coefficients,” Journal of Thermophys- ics and Heat Transfer, VoI.
3, No. 2, pp. 146-152.
Osman, A. M., and Beck, J. V., 1989b, “QUENCHZD A General
Computer Program for Two-Dimensional Inverse Heat Transfer
Problem,” Heat Transfer Group, Department of Mechanical
Engineering, Michigan State University, MSU-ENGR- 89-017, October.
1, 1989.
Ozisik, N. M., 1993, Heat Conduction, 2nd edition, Wdey Science,
New York. Pasquetti, R., and Le Niliot, C., 1991, ‘‘Boundary
Element Approach for Inverse Heat
Conduction Problems: Application to a Bidimensional Transient
Numerical Experiment,” Numerical Heat Transfer; Pan B, Vol. 20, pp.
169-189.
Raynaud, M. and Beck J. V., 1988, “Methodology for Comparison of
Inverse Heat Conduction Methods,” ASME Journal of Heat Transfer,
Vol. 110, pp. 30-37
Reinhardt, H. J. and Hao, N. H., 1996a, “A Sequential Conjugate
Gradient Method for the Stable Numerical Solution to Inverse Heat
Conduction Problems,” Inverse Problems. Vol. 2, pp. 263-272.
Reinhardt, H. J. and Hao, N. H., 1996b, “On the Numerical
Solution of Inverse Heat Conduction Problems by Gradient Methods:‘
Proceeding of the Second Interna- tional Conference on Inverse
Problems in Engineering: Theory and Practice, eds. D. Delaunay, K.
Woodbury, and M. Raynaud, 9-14 June 1996, LeCroisic, France, ASME
Engineering Foundation.
Scott, E. P. and Beck, J.V., 1989, “Analysis of Order of the
Sequential Regularization Solutions of Inverse Heat Conduction
Problems,” ASME Journal of Heat Transfer;
Tikhonov, A.N. and Anenin, V.Y., 1977, Solutions of Nl-Posed
Problems, Winston and Sons, Washington D.C.
Truffart, B., Jarny. Y., and Delaunay, D., 1993, “A General
Optimization Algorithm to Solve 2-d Boundary Inverse Heat
Conduction Problems Using Finite Elements,” Proceedings of Inverse
Problems in Engineering: Theory a d Practice, ASME, Florida, pp.
53-60.
Tseng, A.A. and Zhao, F. Z., 1996, “Multidimensional Inverse
Transient Heat Conduc- tion Problems by Direct Sensitivity
Coefficient Method using a Finite-Element Scheme,” Numerical Hem
Transfez Part B, Vol. 29, pp. 365-380.
Tseng. A.A., Chen, T.C., and Zhao, F. Z., 19%. “Direct
Sensitivity Coefficient Method for Solving Two-Dimensional Inverse
Heat Conduction Problems by Finite-Ele- ment Scheme,” Numerical
Heat Transfer; Part B. Vol. 27, pp. 291-307.
Tuan, P.-C., Ji, C.-C.. Fong, L.-W., and Huang. W.-T., 1996, “An
Input Estimation Approach to On-Line Two-Dimensional Inverse Heat
Conduction Problems,” Numerical Heat Transfer, Part B. Vol. 29, pp.
345-363.
Zabaras, N. and Yang, G.. 19%. “Inverse Design and Control of
Microstructural Devel- opment in Solidification Processes with
Natural Convection,” presented at the 31st National Heat Transfer
Conference Houston. Texas, 3-6 August, 1996, edited by V. Prasad et
al., ASME New York.
Zabaras, N. and Liu, J., 1988, ”i\n Analysis of Two-Dimensional
Linear Inverse Heat Transfer Problems Using an Integral Method.”
Numerical Heat Transfer, Vol. 13,
Vol. 11 1, pp. 218-224.
pp. 527-533.