Embed Size (px)
Citation preview

Research ArticleMultiobjective Optimization for Fixture Locating Layout ofSheet Metal Part Using SVR and NSGA-II
Yuan Yang Zhongqi Wang Bo Yang Zewang Jing and Yonggang Kang
TheMinistry of Education Key Laboratory of Contemporary Design and Integrated Manufacturing TechnologyNorthwestern Polytechnical University No 127 West Youyi Road Xirsquoan 710072 China
Correspondence should be addressed to Yuan Yang yangyuan0824mailnwpueducn
Received 10 April 2017 Revised 24 June 2017 Accepted 4 July 2017 Published 17 August 2017
Academic Editor Juan C Leyva
Copyright copy 2017 Yuan Yang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Fixture plays a significant role in determining the sheet metal part (SMP) spatial position and restraining its excessive deformationin many manufacturing operations However it is still a difficult task to design and optimize SMP fixture locating layout at presentbecause there exist multiple conflicting objectives and excessive computational cost of finite element analysis (FEA) during theoptimization process To this end a new multiobjective optimization method for SMP fixture locating layout is proposed in thispaper based on the support vector regression (SVR) surrogate model and the elitist nondominated sorting genetic algorithm(NSGA-II) By using ABAQUS Python script interface a parametric FEA model is established And the fixture locating layoutis treated as design variables while the overall deformation and maximum deformation of SMP under external forces are as themultiple objective functions First a limited number of training and testing samples are generated by combining Latin hypercubedesign (LHD) with FEA Second two SVR prediction models corresponding to the multiple objectives are established by learningfrom the limited training samples and are integrated as the multiobjective optimization surrogate modelThird NSGA-II is appliedto determine the Pareto optimal solutions of SMP fixture locating layout Finally a multiobjective optimization for fixture locatinglayout of an aircraft fuselage skin case is conducted to illustrate and verify the proposed method
1 Introduction
Sheet metal part (SMP) having the advantages of highstrength light weight and fluent geometric modeling widelyexists in various fields of aerospace vehicle and so on [1 2]However it is easy to deform during its assembly machiningand inspection processes because of the properties of thinwall large size and low rigidity Recently flexible fixtureis widely used during the whole manufacturing process tolocate and constrain SMP accurately to reduce its dimen-sional and form errors Moreover the ldquoN-2-1rdquo (119873 gt 3)locating principle originally proposed by Cai et al [3] isextensively recognized in the fixture design to not only ensurethe locating deterministic but also restrain the excessivedeformation of SMP However the key to the application ofldquoN-2-1rdquo principle in flexible fixture design is how to findthe optimal fixture locating layout to minimize the SMPdeformation
To determine the optimal SMP fixture locating layouteffectively and efficiently many scholars and technicians haveconducted a lot of research In the beginning finite elementanalysis (FEA) and evolutionary algorithm were integratedto model the SMP fixture system and search for the optimalSMP fixture layout Kaya [4] proposed a combined GA andFEA approach to optimizing the fixture layout to decreasethe workpiece deformation during its machining processPrabhaharan et al [5] used FEA to compute the workpiecedeformation and applied ant colony algorithm (ACA) forthe workpiece fixture layout optimization to minimize itsdimensional and form errors Dou et al [6] established anFEA model implemented by ANSYS to calculate the elasticdeformation of the part and employed four evolutionaryapproaches including GA PSO improved GA and improvedPSO for fixture layout optimization Cheng et al [7] presenteda hierarchical fixture layout model to optimize the locatingpoints of aeronautical thin-walled structure to decrease the
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 7076143 10 pageshttpsdoiorg10115520177076143
2 Mathematical Problems in Engineering
assembly variation by genetic algorithm and ants algorithmXiong et al [8] put forward an ldquoN-2-1-1rdquo locating principleand then solved the fixture layout optimization of a compliantaerospace part by integrating FEA and GA
We can see that the optimizationmethod integrating FEAwith evolutionary algorithm has become the main popularmethod to optimize the fixture locating layout of SMP How-ever since there is no explicit functional relation betweenfixture layout scheme and the corresponding SMP deforma-tion the above optimization methods for SMP fixture layoutoften involve a lot of time-consuming FEA which resultsin unbearable computational costs and burdens Thereforethe surrogate or prediction models such as artificial neuralnetwork (ANN) and response surface methodology (RSM)were developed and applied to approximate the mappingrelation between the design variables and objective valuesso as to improve the optimization efficiency and to decreasethe computational cost Li et al [9] developed three differentdesign models of an ANN-enhanced RSM a nonlinear pro-gramming model and a polynomial RSM to assist optimiza-tion and design of fixture layout during the SMP spot weldingassembly Rex and Ravindran [10] also established an ANN-basedmodel to approximate theworkpiece fixture system anddetermine the optimal fixture layout to reduce the maximumelastic deformation by incorporating full factorial design ofexperiments (DOE) and statistical analysis Lu and Zhao [11]built a back propagation neural network (BPNN) so as toapproximate the deformation of SMP under a given fixturelayout and then employed GA to find the optimal fixturelayout based on the BPNN prediction model Wang et al [1213] proposed a radial basis function neural network (RBFNN)prediction model to predict the deformation of SMP andthen carried out the follow-up work to search for the optimalfixture layout by integrating RBFNN and bat algorithm toimprove the location quality and optimization efficiencyFurthermore Yang et al [14] presented an integrated methodto determine the optimumfixture locating layout tominimizethe overall deformation of SMP by combining kriging withcuckoo search algorithm
All researches above only involve single objective of fix-ture layout optimization However in most cases the fixturelayout design should satisfy the requirements of multipleobjectives So as to decrease the workpiece deformationand improve the deformation distributing uniformity Chenet al [15] put forward a multiobjective method for fixturedesign optimization where FEA was used to calculate thedeformation and GA was employed to solve the optimizationmodel By regarding fixture locating layout as amultiobjectiveoptimization problem Wang and Nee [16] applied nondom-inated GA and ACA to solve the multiobjective problemwith the objective of maximizing the distance of the locatorsand minimizing the locating error and the deviation of thelocating error Liu et al [17] developed an accelerated FEAmodel to calculate the nodal displacements of the workpieceunder external forces and proposed an optimization methodto find the optimal fixture layout based on the multiobjectiveGA Considering multiple requirements for the locatinglayout of a checking fixture such as detachability stability and
Z
YX
O
e LPs on ldquoNrdquoe LPs on ldquo2rdquoe LPs on ldquo1rdquo
Figure 1 The ldquoN-2-1rdquo locating principle for a curved SMP
accuracy Jiang et al [18] presented amultiobjective optimiza-tion method to continuous search for a detachable stableand accurate locating layout in checking fixture design Bycombining nondominated sorting algorithm and the socialradiation algorithm a nondominated sorting social radiationalgorithm was proposed by Xing et al [19] to conductthe multiobjective optimization of compliant parts fixturescheme to simultaneously meet the multiple requirements ofgravity deformation and assembly tolerance
In this paper a new multiobjective optimization methodby integrating support vector regression (SVR) with theelitist nondominated sorting genetic algorithm (NSGA-II)is proposed for the SMP fixture locating layout design Theobjective here is twofold One is to minimize the overalldeformation of SMP and the other is to minimize the max-imum deformation A parametric FEA model implementedby Python scripting interface of ABAQUS is developed tocalculate the deformation for a given fixture layout undergiven forces Then NSGA-II is integrated and the NSGA-IItoolbox based on MATLAB is developed to solve the opti-mization problem The remainder of this paper is organizedas follows The mathematical model for SMP fixture layoutmultiobjective optimization is represented in Section 2The fundamental theory related to SVR is introduced inSection 3 Section 4 describes the construction flowchart forthe multiobjective optimization of SMP fixture layout usingSVR and NSGA-II In Section 5 an experiment is conductedto verify the proposed optimization method by comparingthe simulated results with the experimental data Finally themajor conclusions are provided in Section 6
2 Problem Formulation
Since it is easy to deform in many manufacturing operationsSMP is often located under an overconstraint condition inthe flexible fixture based on the ldquoN-2-1rdquo (119873 gt 3) locatingprinciple Figure 1 depicts the typical ldquoN-2-1rdquo (119873 = 4) fixturelocating scheme for a curved SMP It can be seen that Nlocating points (LPs) generally more than three are requiredon the primary datum to prevent excessive deformation andsupply more reinforcements for SMP And two LPs on thesecondary datum and one on the tertiary datum are expected
Mathematical Problems in Engineering 3
to locate SMPuniquely in spaceObviously the locating effec-tiveness based on ldquoN-2-1rdquo principle is strongly related to thelayout of theN LPs where the numberN is determined by theSMP dimensional specifications In this paper our interestsfocus on the flexible fixture layout optimization of SMP onthe primary datum to minimize its overall deformation andmaximum deformation synchronously Therefore the fixturelayout design is regarded as a multiobjective optimizationproblem in this work
In SMP fixture layout optimization problem two goals(the overall deformation accuracy and the maximum defor-mation accuracy) should be synchronously satisfied to obtainan optimal solution In this paper FEA method is employedtomodel the SMPfixture system and to compute the objectivevalues Here in order to minimize the human assistance andrealize the automation of the whole iterative optimizationand FEA this paper performs the secondary developmentof ABAQUS and establishes a parametric FEA model forSMP fixture layout optimization Thus the multiobjectiveoptimization problem can be formulated as
Find X = [x1 x2 x119894 x119895 x119873]Minimize 119865 = 1198651 1198652
1198651 (X) = radicsum119871119894=1 1199081198942 (X)1198711198652 (X) = max 119908119894 (X)
Subject to x119894 isin 119878 x119895 isin 119878 x119894 = x119895
(1)
where X represents the design variables on behalf of variousfixture layout schemes x119894 and x119895 represent the coordinatesof any two different LPs respectively where 119894 119895 = 1 1198731198651 and 1198652 denote the two goals the overall deformation andmaximum deformation respectively 119908119894 is the displacementdeviation of the ith finite element node after deformation Ldepicts the total number of the SMP finite element nodes Srepresents the set of all finite element nodes Here the designvariable X has to be in the predetermined domain S and ineach fixture layout scheme any two LPs cannot overlap
3 SVR
As a powerful machine learning method support vectormachine (SVM) was initially presented by Vapnik [20 21]and applied to solve regression and classification problemshaving small samples and high dimensions on the base ofstructural riskminimization principle and statistical learningtheory By introducing Vapnikrsquos 120576-insensitive loss functionthe regression version of SVM named SVR has been usedas a powerful and effective method to solve the nonlinearregression problems
Given a training set 119879 = (X119895 119865119895) | 119895 = 1 2 119897 ofsize 119897 where X119895 are the input vectors (representing fixturelocating layout schemes) and 119865119895 = 1198651119895 1198652119895 are the associatedoutput values (representing the SMP overall deformation1198651119895 and maximum deformation 1198652119895 ) of X119895 The aim of SVR
Deviation0
Loss
lowast
lowast
F = (X) + bWT
Figure 2 SVR and Vapnikrsquos 120576-insensitive loss function
is to provide a nonlinear mapping function to map thetraining data to a higher dimensional feature space Now thenonlinear mapping relation between the input data and theoutput values can be expressed as follows
119865 (X) = W119879120593 (X) + 119887 (WX isin 119877119873) (2)
where 120593(X) is the feature that is nonlinearly mapped fromthe input vector X W and b are the coefficients to beadjusted Moreover Vapnikrsquos 120576-insensitive loss function [20]is employed in this paper to panelize the training errorbetween the real training value 119865119895 and the regression value119865119895
As displayed in Figure 2 this 120576-insensitive loss functionformulizes a tube with a radius of 120576 around the assumptiveregression function so that if a training sample point lieswithin the tube the loss function equals zero while if atraining sample point falls on or outside the tube the loss isin proportion to the magnitude of the Euclidean differencebetween the training sample point and the radius 120576 of thetube Thus the SVR regression problem can be solved bycalculating the following constrained optimization function
minimize 12W119879W + 119862 119897sum119895=1
(120585119895 + 120585lowast119895 )subject to 119865119895 minus (W119879120593 (X119895) + 119887) le 120576 + 120585119895
(W119879120593 (X119895) + 119887) minus 119865119895 le 120576 + 120585lowast119895120576 120585119894 120585lowast119895 ge 0 119895 = 1 2 119897
(3)
Here the penalty factor 119862 gt 0 defines the trade-offbetween the model complexity of 119865(X) = W119879120593(X) + 119887 andthe amount up to which deviations larger than the radius120576 can be tolerated 120585119894 and 120585lowast119894 denote the nonnegative slackvariables measuring the error of the up and down sidesseparately Then by solving the optimization problem above
4 Mathematical Problems in Engineering
and introducing Lagrangemultipliers the coefficientW of (1)can be obtained by
W = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593 (X119895) (4)
where 120572119894 and 120572lowast119894 (0 le 120572119894 120572lowast119894 le 119862) are the Lagrange multipli-ersThen the SVR regression function can be reformulated toa dual equation
119865 (X) = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593119879 (X119895)120593 (X) + 119887
= 119897sum119895=1
(120572119895 minus 120572lowast119895 )119870 (X119895X) + 119887(5)
Here119870(X119895X) stands for the so-called kernel function Inthis paper the most commonly used kernel function namelythe Gaussian radial basis function (RBF) is adopted in theSVR modeling The RBF kernel function can be expressed as
119870(X119895X) = exp (minus120574 10038171003817100381710038171003817X119895 minus X100381710038171003817100381710038172) (6)
where 120574 denotes the width of the Gaussian RBF functionX119895 represents the jth input of the training sample set andX represents the input of the prediction data Here thecoefficient of 119886119895 119886lowast119895 and b can be obtained by severaliterations of the training sample set Now by tuning thepenalty factor C width of the RBF kernel function 120574 andtube size of 120576-insensitive loss function 120576 the SVR model canbe constructed to deal with the optimization problem of theSMP fixture locating layout
4 Multiobjective Optimization Based onSVR and NSGA-II
Multiobjective optimization always typically involves multi-ple conflicting objectives and does not have a feasible solutionthat minimizes or maximizes all objectives synchronouslyHence the final outcome of such a multiobjective opti-mization problem is a set of trade-off solutions betweendifferent objectives These trade-off points are termed asPareto optimal solutions which are not dominated by anyother solution and cannot be improved in the case of atleast one other objective without worsening The set of allthese feasible nondominated solutions is termed as Paretooptimal solution set and the corresponding objective valuesare named the Pareto front [22] Figure 3 demonstrates thePareto front for the optimization of two objectives of Obj-1and Obj-2
Recently it has been found that NSGA-II can convergenear to the real Pareto front and keep a good diversityof the population in the final Pareto optimal solution set[23 24] In this work the Pareto optimal solutions and thecorresponding Pareto front are obtained by NSGA-II which
Obj-1
Nondominated solutions
Pareto front
Dominated solutions
Ideal solutionlowastlowast
lowast
lowastlowast
lowastlowast
lowast
lowastlowast
lowast
lowast
Obj
-2
Figure 3 Pareto front for a two-objective optimization
was originally proposed by Deb et al [24] based on thenondominated sorting genetic algorithm (NSGA) [25] Thethree main features of NSGA-II are elitist strategy crowdingdistance and fast ranking of nondominated solutionsThere-fore so as to verify the feasibility and effectiveness of theproposed multiobjective optimization method integratingSVR and NSGA-II based on the ABAQUS [26] secondarydevelopment this paper uses Python language to compileFEAmodel of the parametric SMP fixture system to generatethe limited training and testing samples for SVR surrogatemodels and finally uses MATLAB language to compile theNSGA-II program to do the multiobjective optimization ofSMP fixture layout
ABAQUS can execute the finite element calculation byrunning a script file with the PY extension and store thepostprocessing results in a database file with the ODBextension MATLAB can read and modify the PY andODB files to achieve the connection and data transmissionbetween MATLAB language and ABAQUS software Thusthe information from optimization algorithm can be sentto finite element model by modifying the PY files and thedisplacement can be received from ABAQUS by reading theODB files The main steps of the multiobjective optimizationmethod are described as follows
Step 1 Generate the limited training and testing samples byLatin hypercube design (LHD) [27] and then calculate theresponding overall deformation and maximum deformationof the SMP under external forces with the help of theparametric FEA model
Step 2 Scale the training data set and testing data set into therange of [0 1] using the following normalization formula
1199091015840119894 = 119909119894 minus 119909min119909max minus 119909min (7)
where 119909119894 is the ith original data value 1199091015840119894 is the ith scaled datavalue and 119909max and 119909min are the upper and lower bound ofthe original data respectively
Mathematical Problems in Engineering 5
Yes
No
Execute a tournament selection
Implement crossover and mutation operators
Evaluate the dierent objectives for the merged population
Perform the nondominated sorting on the population
Output Pareto optimal solutions
End
Construct the initial SVR models for the overall and maximum deformation of SMP
Train and test the two SVR models
Satisfy theprediction accuracy
Build the nal SVR surrogate model for the overall and maximum deformation of SMP
Yes
No
Obtain the training and testing
Incr
ease
the t
rain
ing
sam
ples
Start
Evaluate the dierent objectives for the initial parent population
Perform the nondominated sorting on the individuals
Set the generation count t = 0
SVR
NSGA-II
Build a parametric FEA model using Python script interface
Tune
the
hype
rpar
amet
ers o
f SV
R
samples by LHD and FEA
Initialize the parent population P0
Merge the parent Pt and ospring population Qt
Apply elitism to select better individuals as the new parent population Pt+1
t = tGR
t=
t+1
Generate the ospring population Qt
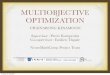
Figure 4 Flowchart for multiobjective optimization of SMP fixture layout using SVR and NSGA-II
Step 3 Tune the SVR hyperparameters (C 120574 and 120576) andestablish the SVR prediction models to depict the nonlinearmapping relation between different fixture layout and thecorresponding SMP deformation
Step 4 Calculate and analyze the relative root mean squarederror (RRMSE) of the SVR models on the testing sample setThen increase training samples and repeat Steps 1ndash4 until theprediction accuracy is satisfied
Step 5 Initialize the parent population 1198750 of NSGA-II ran-domly and evaluate the population by calculating the objec-tives of each individual using the established SVR predictionmodels
Step 6 Perform the nondominated sorting on 1198750 and rankeach individual based on the dominance criteria
Step 7 Compute the crowding distances and sort the individ-uals
Step 8 Select individuals using a tournament selection andstore them in a temporary mating pool Then apply thecrossover and mutation operators to produce the offspringpopulation119874119905 where subscript t denotes the count of currentgeneration
Step 9 Merge the parent population 119875119905 and offspring popu-lation 119874119905 to generate a larger population and assign a fitnessvalue to each individual by a fast nondominated sorting
Step 10 Perform elitism to find the individuals with betterfitness from the merged population as the new parentpopulation 119875119905+1Step 11 Repeat Steps 8ndash10 until the maximum number ofiterations is reached (119905 = 119905max)
When the optimization process terminates the nondom-inated solutions of the final population are the approximatePareto optimal solutions with a good diversity Figure 4
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
assembly variation by genetic algorithm and ants algorithmXiong et al [8] put forward an ldquoN-2-1-1rdquo locating principleand then solved the fixture layout optimization of a compliantaerospace part by integrating FEA and GA
We can see that the optimizationmethod integrating FEAwith evolutionary algorithm has become the main popularmethod to optimize the fixture locating layout of SMP How-ever since there is no explicit functional relation betweenfixture layout scheme and the corresponding SMP deforma-tion the above optimization methods for SMP fixture layoutoften involve a lot of time-consuming FEA which resultsin unbearable computational costs and burdens Thereforethe surrogate or prediction models such as artificial neuralnetwork (ANN) and response surface methodology (RSM)were developed and applied to approximate the mappingrelation between the design variables and objective valuesso as to improve the optimization efficiency and to decreasethe computational cost Li et al [9] developed three differentdesign models of an ANN-enhanced RSM a nonlinear pro-gramming model and a polynomial RSM to assist optimiza-tion and design of fixture layout during the SMP spot weldingassembly Rex and Ravindran [10] also established an ANN-basedmodel to approximate theworkpiece fixture system anddetermine the optimal fixture layout to reduce the maximumelastic deformation by incorporating full factorial design ofexperiments (DOE) and statistical analysis Lu and Zhao [11]built a back propagation neural network (BPNN) so as toapproximate the deformation of SMP under a given fixturelayout and then employed GA to find the optimal fixturelayout based on the BPNN prediction model Wang et al [1213] proposed a radial basis function neural network (RBFNN)prediction model to predict the deformation of SMP andthen carried out the follow-up work to search for the optimalfixture layout by integrating RBFNN and bat algorithm toimprove the location quality and optimization efficiencyFurthermore Yang et al [14] presented an integrated methodto determine the optimumfixture locating layout tominimizethe overall deformation of SMP by combining kriging withcuckoo search algorithm
All researches above only involve single objective of fix-ture layout optimization However in most cases the fixturelayout design should satisfy the requirements of multipleobjectives So as to decrease the workpiece deformationand improve the deformation distributing uniformity Chenet al [15] put forward a multiobjective method for fixturedesign optimization where FEA was used to calculate thedeformation and GA was employed to solve the optimizationmodel By regarding fixture locating layout as amultiobjectiveoptimization problem Wang and Nee [16] applied nondom-inated GA and ACA to solve the multiobjective problemwith the objective of maximizing the distance of the locatorsand minimizing the locating error and the deviation of thelocating error Liu et al [17] developed an accelerated FEAmodel to calculate the nodal displacements of the workpieceunder external forces and proposed an optimization methodto find the optimal fixture layout based on the multiobjectiveGA Considering multiple requirements for the locatinglayout of a checking fixture such as detachability stability and
Z
YX
O
e LPs on ldquoNrdquoe LPs on ldquo2rdquoe LPs on ldquo1rdquo
Figure 1 The ldquoN-2-1rdquo locating principle for a curved SMP
accuracy Jiang et al [18] presented amultiobjective optimiza-tion method to continuous search for a detachable stableand accurate locating layout in checking fixture design Bycombining nondominated sorting algorithm and the socialradiation algorithm a nondominated sorting social radiationalgorithm was proposed by Xing et al [19] to conductthe multiobjective optimization of compliant parts fixturescheme to simultaneously meet the multiple requirements ofgravity deformation and assembly tolerance
In this paper a new multiobjective optimization methodby integrating support vector regression (SVR) with theelitist nondominated sorting genetic algorithm (NSGA-II)is proposed for the SMP fixture locating layout design Theobjective here is twofold One is to minimize the overalldeformation of SMP and the other is to minimize the max-imum deformation A parametric FEA model implementedby Python scripting interface of ABAQUS is developed tocalculate the deformation for a given fixture layout undergiven forces Then NSGA-II is integrated and the NSGA-IItoolbox based on MATLAB is developed to solve the opti-mization problem The remainder of this paper is organizedas follows The mathematical model for SMP fixture layoutmultiobjective optimization is represented in Section 2The fundamental theory related to SVR is introduced inSection 3 Section 4 describes the construction flowchart forthe multiobjective optimization of SMP fixture layout usingSVR and NSGA-II In Section 5 an experiment is conductedto verify the proposed optimization method by comparingthe simulated results with the experimental data Finally themajor conclusions are provided in Section 6
2 Problem Formulation
Since it is easy to deform in many manufacturing operationsSMP is often located under an overconstraint condition inthe flexible fixture based on the ldquoN-2-1rdquo (119873 gt 3) locatingprinciple Figure 1 depicts the typical ldquoN-2-1rdquo (119873 = 4) fixturelocating scheme for a curved SMP It can be seen that Nlocating points (LPs) generally more than three are requiredon the primary datum to prevent excessive deformation andsupply more reinforcements for SMP And two LPs on thesecondary datum and one on the tertiary datum are expected
Mathematical Problems in Engineering 3
to locate SMPuniquely in spaceObviously the locating effec-tiveness based on ldquoN-2-1rdquo principle is strongly related to thelayout of theN LPs where the numberN is determined by theSMP dimensional specifications In this paper our interestsfocus on the flexible fixture layout optimization of SMP onthe primary datum to minimize its overall deformation andmaximum deformation synchronously Therefore the fixturelayout design is regarded as a multiobjective optimizationproblem in this work
In SMP fixture layout optimization problem two goals(the overall deformation accuracy and the maximum defor-mation accuracy) should be synchronously satisfied to obtainan optimal solution In this paper FEA method is employedtomodel the SMPfixture system and to compute the objectivevalues Here in order to minimize the human assistance andrealize the automation of the whole iterative optimizationand FEA this paper performs the secondary developmentof ABAQUS and establishes a parametric FEA model forSMP fixture layout optimization Thus the multiobjectiveoptimization problem can be formulated as
Find X = [x1 x2 x119894 x119895 x119873]Minimize 119865 = 1198651 1198652
1198651 (X) = radicsum119871119894=1 1199081198942 (X)1198711198652 (X) = max 119908119894 (X)
Subject to x119894 isin 119878 x119895 isin 119878 x119894 = x119895
(1)
where X represents the design variables on behalf of variousfixture layout schemes x119894 and x119895 represent the coordinatesof any two different LPs respectively where 119894 119895 = 1 1198731198651 and 1198652 denote the two goals the overall deformation andmaximum deformation respectively 119908119894 is the displacementdeviation of the ith finite element node after deformation Ldepicts the total number of the SMP finite element nodes Srepresents the set of all finite element nodes Here the designvariable X has to be in the predetermined domain S and ineach fixture layout scheme any two LPs cannot overlap
3 SVR
As a powerful machine learning method support vectormachine (SVM) was initially presented by Vapnik [20 21]and applied to solve regression and classification problemshaving small samples and high dimensions on the base ofstructural riskminimization principle and statistical learningtheory By introducing Vapnikrsquos 120576-insensitive loss functionthe regression version of SVM named SVR has been usedas a powerful and effective method to solve the nonlinearregression problems
Given a training set 119879 = (X119895 119865119895) | 119895 = 1 2 119897 ofsize 119897 where X119895 are the input vectors (representing fixturelocating layout schemes) and 119865119895 = 1198651119895 1198652119895 are the associatedoutput values (representing the SMP overall deformation1198651119895 and maximum deformation 1198652119895 ) of X119895 The aim of SVR
Deviation0
Loss
lowast
lowast
F = (X) + bWT
Figure 2 SVR and Vapnikrsquos 120576-insensitive loss function
is to provide a nonlinear mapping function to map thetraining data to a higher dimensional feature space Now thenonlinear mapping relation between the input data and theoutput values can be expressed as follows
119865 (X) = W119879120593 (X) + 119887 (WX isin 119877119873) (2)
where 120593(X) is the feature that is nonlinearly mapped fromthe input vector X W and b are the coefficients to beadjusted Moreover Vapnikrsquos 120576-insensitive loss function [20]is employed in this paper to panelize the training errorbetween the real training value 119865119895 and the regression value119865119895
As displayed in Figure 2 this 120576-insensitive loss functionformulizes a tube with a radius of 120576 around the assumptiveregression function so that if a training sample point lieswithin the tube the loss function equals zero while if atraining sample point falls on or outside the tube the loss isin proportion to the magnitude of the Euclidean differencebetween the training sample point and the radius 120576 of thetube Thus the SVR regression problem can be solved bycalculating the following constrained optimization function
minimize 12W119879W + 119862 119897sum119895=1
(120585119895 + 120585lowast119895 )subject to 119865119895 minus (W119879120593 (X119895) + 119887) le 120576 + 120585119895
(W119879120593 (X119895) + 119887) minus 119865119895 le 120576 + 120585lowast119895120576 120585119894 120585lowast119895 ge 0 119895 = 1 2 119897
(3)
Here the penalty factor 119862 gt 0 defines the trade-offbetween the model complexity of 119865(X) = W119879120593(X) + 119887 andthe amount up to which deviations larger than the radius120576 can be tolerated 120585119894 and 120585lowast119894 denote the nonnegative slackvariables measuring the error of the up and down sidesseparately Then by solving the optimization problem above
4 Mathematical Problems in Engineering
and introducing Lagrangemultipliers the coefficientW of (1)can be obtained by
W = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593 (X119895) (4)
where 120572119894 and 120572lowast119894 (0 le 120572119894 120572lowast119894 le 119862) are the Lagrange multipli-ersThen the SVR regression function can be reformulated toa dual equation
119865 (X) = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593119879 (X119895)120593 (X) + 119887
= 119897sum119895=1
(120572119895 minus 120572lowast119895 )119870 (X119895X) + 119887(5)
Here119870(X119895X) stands for the so-called kernel function Inthis paper the most commonly used kernel function namelythe Gaussian radial basis function (RBF) is adopted in theSVR modeling The RBF kernel function can be expressed as
119870(X119895X) = exp (minus120574 10038171003817100381710038171003817X119895 minus X100381710038171003817100381710038172) (6)
where 120574 denotes the width of the Gaussian RBF functionX119895 represents the jth input of the training sample set andX represents the input of the prediction data Here thecoefficient of 119886119895 119886lowast119895 and b can be obtained by severaliterations of the training sample set Now by tuning thepenalty factor C width of the RBF kernel function 120574 andtube size of 120576-insensitive loss function 120576 the SVR model canbe constructed to deal with the optimization problem of theSMP fixture locating layout
4 Multiobjective Optimization Based onSVR and NSGA-II
Multiobjective optimization always typically involves multi-ple conflicting objectives and does not have a feasible solutionthat minimizes or maximizes all objectives synchronouslyHence the final outcome of such a multiobjective opti-mization problem is a set of trade-off solutions betweendifferent objectives These trade-off points are termed asPareto optimal solutions which are not dominated by anyother solution and cannot be improved in the case of atleast one other objective without worsening The set of allthese feasible nondominated solutions is termed as Paretooptimal solution set and the corresponding objective valuesare named the Pareto front [22] Figure 3 demonstrates thePareto front for the optimization of two objectives of Obj-1and Obj-2
Recently it has been found that NSGA-II can convergenear to the real Pareto front and keep a good diversityof the population in the final Pareto optimal solution set[23 24] In this work the Pareto optimal solutions and thecorresponding Pareto front are obtained by NSGA-II which
Obj-1
Nondominated solutions
Pareto front
Dominated solutions
Ideal solutionlowastlowast
lowast
lowastlowast
lowastlowast
lowast
lowastlowast
lowast
lowast
Obj
-2
Figure 3 Pareto front for a two-objective optimization
was originally proposed by Deb et al [24] based on thenondominated sorting genetic algorithm (NSGA) [25] Thethree main features of NSGA-II are elitist strategy crowdingdistance and fast ranking of nondominated solutionsThere-fore so as to verify the feasibility and effectiveness of theproposed multiobjective optimization method integratingSVR and NSGA-II based on the ABAQUS [26] secondarydevelopment this paper uses Python language to compileFEAmodel of the parametric SMP fixture system to generatethe limited training and testing samples for SVR surrogatemodels and finally uses MATLAB language to compile theNSGA-II program to do the multiobjective optimization ofSMP fixture layout
ABAQUS can execute the finite element calculation byrunning a script file with the PY extension and store thepostprocessing results in a database file with the ODBextension MATLAB can read and modify the PY andODB files to achieve the connection and data transmissionbetween MATLAB language and ABAQUS software Thusthe information from optimization algorithm can be sentto finite element model by modifying the PY files and thedisplacement can be received from ABAQUS by reading theODB files The main steps of the multiobjective optimizationmethod are described as follows
Step 1 Generate the limited training and testing samples byLatin hypercube design (LHD) [27] and then calculate theresponding overall deformation and maximum deformationof the SMP under external forces with the help of theparametric FEA model
Step 2 Scale the training data set and testing data set into therange of [0 1] using the following normalization formula
1199091015840119894 = 119909119894 minus 119909min119909max minus 119909min (7)
where 119909119894 is the ith original data value 1199091015840119894 is the ith scaled datavalue and 119909max and 119909min are the upper and lower bound ofthe original data respectively
Mathematical Problems in Engineering 5
Yes
No
Execute a tournament selection
Implement crossover and mutation operators
Evaluate the dierent objectives for the merged population
Perform the nondominated sorting on the population
Output Pareto optimal solutions
End
Construct the initial SVR models for the overall and maximum deformation of SMP
Train and test the two SVR models
Satisfy theprediction accuracy
Build the nal SVR surrogate model for the overall and maximum deformation of SMP
Yes
No
Obtain the training and testing
Incr
ease
the t
rain
ing
sam
ples
Start
Evaluate the dierent objectives for the initial parent population
Perform the nondominated sorting on the individuals
Set the generation count t = 0
SVR
NSGA-II
Build a parametric FEA model using Python script interface
Tune
the
hype
rpar
amet
ers o
f SV
R
samples by LHD and FEA
Initialize the parent population P0
Merge the parent Pt and ospring population Qt
Apply elitism to select better individuals as the new parent population Pt+1
t = tGR
t=
t+1
Generate the ospring population Qt
Figure 4 Flowchart for multiobjective optimization of SMP fixture layout using SVR and NSGA-II
Step 3 Tune the SVR hyperparameters (C 120574 and 120576) andestablish the SVR prediction models to depict the nonlinearmapping relation between different fixture layout and thecorresponding SMP deformation
Step 4 Calculate and analyze the relative root mean squarederror (RRMSE) of the SVR models on the testing sample setThen increase training samples and repeat Steps 1ndash4 until theprediction accuracy is satisfied
Step 5 Initialize the parent population 1198750 of NSGA-II ran-domly and evaluate the population by calculating the objec-tives of each individual using the established SVR predictionmodels
Step 6 Perform the nondominated sorting on 1198750 and rankeach individual based on the dominance criteria
Step 7 Compute the crowding distances and sort the individ-uals
Step 8 Select individuals using a tournament selection andstore them in a temporary mating pool Then apply thecrossover and mutation operators to produce the offspringpopulation119874119905 where subscript t denotes the count of currentgeneration
Step 9 Merge the parent population 119875119905 and offspring popu-lation 119874119905 to generate a larger population and assign a fitnessvalue to each individual by a fast nondominated sorting
Step 10 Perform elitism to find the individuals with betterfitness from the merged population as the new parentpopulation 119875119905+1Step 11 Repeat Steps 8ndash10 until the maximum number ofiterations is reached (119905 = 119905max)
When the optimization process terminates the nondom-inated solutions of the final population are the approximatePareto optimal solutions with a good diversity Figure 4
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
to locate SMPuniquely in spaceObviously the locating effec-tiveness based on ldquoN-2-1rdquo principle is strongly related to thelayout of theN LPs where the numberN is determined by theSMP dimensional specifications In this paper our interestsfocus on the flexible fixture layout optimization of SMP onthe primary datum to minimize its overall deformation andmaximum deformation synchronously Therefore the fixturelayout design is regarded as a multiobjective optimizationproblem in this work
In SMP fixture layout optimization problem two goals(the overall deformation accuracy and the maximum defor-mation accuracy) should be synchronously satisfied to obtainan optimal solution In this paper FEA method is employedtomodel the SMPfixture system and to compute the objectivevalues Here in order to minimize the human assistance andrealize the automation of the whole iterative optimizationand FEA this paper performs the secondary developmentof ABAQUS and establishes a parametric FEA model forSMP fixture layout optimization Thus the multiobjectiveoptimization problem can be formulated as
Find X = [x1 x2 x119894 x119895 x119873]Minimize 119865 = 1198651 1198652
1198651 (X) = radicsum119871119894=1 1199081198942 (X)1198711198652 (X) = max 119908119894 (X)
Subject to x119894 isin 119878 x119895 isin 119878 x119894 = x119895
(1)
where X represents the design variables on behalf of variousfixture layout schemes x119894 and x119895 represent the coordinatesof any two different LPs respectively where 119894 119895 = 1 1198731198651 and 1198652 denote the two goals the overall deformation andmaximum deformation respectively 119908119894 is the displacementdeviation of the ith finite element node after deformation Ldepicts the total number of the SMP finite element nodes Srepresents the set of all finite element nodes Here the designvariable X has to be in the predetermined domain S and ineach fixture layout scheme any two LPs cannot overlap
3 SVR
As a powerful machine learning method support vectormachine (SVM) was initially presented by Vapnik [20 21]and applied to solve regression and classification problemshaving small samples and high dimensions on the base ofstructural riskminimization principle and statistical learningtheory By introducing Vapnikrsquos 120576-insensitive loss functionthe regression version of SVM named SVR has been usedas a powerful and effective method to solve the nonlinearregression problems
Given a training set 119879 = (X119895 119865119895) | 119895 = 1 2 119897 ofsize 119897 where X119895 are the input vectors (representing fixturelocating layout schemes) and 119865119895 = 1198651119895 1198652119895 are the associatedoutput values (representing the SMP overall deformation1198651119895 and maximum deformation 1198652119895 ) of X119895 The aim of SVR
Deviation0
Loss
lowast
lowast
F = (X) + bWT
Figure 2 SVR and Vapnikrsquos 120576-insensitive loss function
is to provide a nonlinear mapping function to map thetraining data to a higher dimensional feature space Now thenonlinear mapping relation between the input data and theoutput values can be expressed as follows
119865 (X) = W119879120593 (X) + 119887 (WX isin 119877119873) (2)
where 120593(X) is the feature that is nonlinearly mapped fromthe input vector X W and b are the coefficients to beadjusted Moreover Vapnikrsquos 120576-insensitive loss function [20]is employed in this paper to panelize the training errorbetween the real training value 119865119895 and the regression value119865119895
As displayed in Figure 2 this 120576-insensitive loss functionformulizes a tube with a radius of 120576 around the assumptiveregression function so that if a training sample point lieswithin the tube the loss function equals zero while if atraining sample point falls on or outside the tube the loss isin proportion to the magnitude of the Euclidean differencebetween the training sample point and the radius 120576 of thetube Thus the SVR regression problem can be solved bycalculating the following constrained optimization function
minimize 12W119879W + 119862 119897sum119895=1
(120585119895 + 120585lowast119895 )subject to 119865119895 minus (W119879120593 (X119895) + 119887) le 120576 + 120585119895
(W119879120593 (X119895) + 119887) minus 119865119895 le 120576 + 120585lowast119895120576 120585119894 120585lowast119895 ge 0 119895 = 1 2 119897
(3)
Here the penalty factor 119862 gt 0 defines the trade-offbetween the model complexity of 119865(X) = W119879120593(X) + 119887 andthe amount up to which deviations larger than the radius120576 can be tolerated 120585119894 and 120585lowast119894 denote the nonnegative slackvariables measuring the error of the up and down sidesseparately Then by solving the optimization problem above
4 Mathematical Problems in Engineering
and introducing Lagrangemultipliers the coefficientW of (1)can be obtained by
W = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593 (X119895) (4)
where 120572119894 and 120572lowast119894 (0 le 120572119894 120572lowast119894 le 119862) are the Lagrange multipli-ersThen the SVR regression function can be reformulated toa dual equation
119865 (X) = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593119879 (X119895)120593 (X) + 119887
= 119897sum119895=1
(120572119895 minus 120572lowast119895 )119870 (X119895X) + 119887(5)
Here119870(X119895X) stands for the so-called kernel function Inthis paper the most commonly used kernel function namelythe Gaussian radial basis function (RBF) is adopted in theSVR modeling The RBF kernel function can be expressed as
119870(X119895X) = exp (minus120574 10038171003817100381710038171003817X119895 minus X100381710038171003817100381710038172) (6)
where 120574 denotes the width of the Gaussian RBF functionX119895 represents the jth input of the training sample set andX represents the input of the prediction data Here thecoefficient of 119886119895 119886lowast119895 and b can be obtained by severaliterations of the training sample set Now by tuning thepenalty factor C width of the RBF kernel function 120574 andtube size of 120576-insensitive loss function 120576 the SVR model canbe constructed to deal with the optimization problem of theSMP fixture locating layout
4 Multiobjective Optimization Based onSVR and NSGA-II
Multiobjective optimization always typically involves multi-ple conflicting objectives and does not have a feasible solutionthat minimizes or maximizes all objectives synchronouslyHence the final outcome of such a multiobjective opti-mization problem is a set of trade-off solutions betweendifferent objectives These trade-off points are termed asPareto optimal solutions which are not dominated by anyother solution and cannot be improved in the case of atleast one other objective without worsening The set of allthese feasible nondominated solutions is termed as Paretooptimal solution set and the corresponding objective valuesare named the Pareto front [22] Figure 3 demonstrates thePareto front for the optimization of two objectives of Obj-1and Obj-2
Recently it has been found that NSGA-II can convergenear to the real Pareto front and keep a good diversityof the population in the final Pareto optimal solution set[23 24] In this work the Pareto optimal solutions and thecorresponding Pareto front are obtained by NSGA-II which
Obj-1
Nondominated solutions
Pareto front
Dominated solutions
Ideal solutionlowastlowast
lowast
lowastlowast
lowastlowast
lowast
lowastlowast
lowast
lowast
Obj
-2
Figure 3 Pareto front for a two-objective optimization
was originally proposed by Deb et al [24] based on thenondominated sorting genetic algorithm (NSGA) [25] Thethree main features of NSGA-II are elitist strategy crowdingdistance and fast ranking of nondominated solutionsThere-fore so as to verify the feasibility and effectiveness of theproposed multiobjective optimization method integratingSVR and NSGA-II based on the ABAQUS [26] secondarydevelopment this paper uses Python language to compileFEAmodel of the parametric SMP fixture system to generatethe limited training and testing samples for SVR surrogatemodels and finally uses MATLAB language to compile theNSGA-II program to do the multiobjective optimization ofSMP fixture layout
ABAQUS can execute the finite element calculation byrunning a script file with the PY extension and store thepostprocessing results in a database file with the ODBextension MATLAB can read and modify the PY andODB files to achieve the connection and data transmissionbetween MATLAB language and ABAQUS software Thusthe information from optimization algorithm can be sentto finite element model by modifying the PY files and thedisplacement can be received from ABAQUS by reading theODB files The main steps of the multiobjective optimizationmethod are described as follows
Step 1 Generate the limited training and testing samples byLatin hypercube design (LHD) [27] and then calculate theresponding overall deformation and maximum deformationof the SMP under external forces with the help of theparametric FEA model
Step 2 Scale the training data set and testing data set into therange of [0 1] using the following normalization formula
1199091015840119894 = 119909119894 minus 119909min119909max minus 119909min (7)
where 119909119894 is the ith original data value 1199091015840119894 is the ith scaled datavalue and 119909max and 119909min are the upper and lower bound ofthe original data respectively
Mathematical Problems in Engineering 5
Yes
No
Execute a tournament selection
Implement crossover and mutation operators
Evaluate the dierent objectives for the merged population
Perform the nondominated sorting on the population
Output Pareto optimal solutions
End
Construct the initial SVR models for the overall and maximum deformation of SMP
Train and test the two SVR models
Satisfy theprediction accuracy
Build the nal SVR surrogate model for the overall and maximum deformation of SMP
Yes
No
Obtain the training and testing
Incr
ease
the t
rain
ing
sam
ples
Start
Evaluate the dierent objectives for the initial parent population
Perform the nondominated sorting on the individuals
Set the generation count t = 0
SVR
NSGA-II
Build a parametric FEA model using Python script interface
Tune
the
hype
rpar
amet
ers o
f SV
R
samples by LHD and FEA
Initialize the parent population P0
Merge the parent Pt and ospring population Qt
Apply elitism to select better individuals as the new parent population Pt+1
t = tGR
t=
t+1
Generate the ospring population Qt
Figure 4 Flowchart for multiobjective optimization of SMP fixture layout using SVR and NSGA-II
Step 3 Tune the SVR hyperparameters (C 120574 and 120576) andestablish the SVR prediction models to depict the nonlinearmapping relation between different fixture layout and thecorresponding SMP deformation
Step 4 Calculate and analyze the relative root mean squarederror (RRMSE) of the SVR models on the testing sample setThen increase training samples and repeat Steps 1ndash4 until theprediction accuracy is satisfied
Step 5 Initialize the parent population 1198750 of NSGA-II ran-domly and evaluate the population by calculating the objec-tives of each individual using the established SVR predictionmodels
Step 6 Perform the nondominated sorting on 1198750 and rankeach individual based on the dominance criteria
Step 7 Compute the crowding distances and sort the individ-uals
Step 8 Select individuals using a tournament selection andstore them in a temporary mating pool Then apply thecrossover and mutation operators to produce the offspringpopulation119874119905 where subscript t denotes the count of currentgeneration
Step 9 Merge the parent population 119875119905 and offspring popu-lation 119874119905 to generate a larger population and assign a fitnessvalue to each individual by a fast nondominated sorting
Step 10 Perform elitism to find the individuals with betterfitness from the merged population as the new parentpopulation 119875119905+1Step 11 Repeat Steps 8ndash10 until the maximum number ofiterations is reached (119905 = 119905max)
When the optimization process terminates the nondom-inated solutions of the final population are the approximatePareto optimal solutions with a good diversity Figure 4
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
and introducing Lagrangemultipliers the coefficientW of (1)can be obtained by
W = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593 (X119895) (4)
where 120572119894 and 120572lowast119894 (0 le 120572119894 120572lowast119894 le 119862) are the Lagrange multipli-ersThen the SVR regression function can be reformulated toa dual equation
119865 (X) = 119897sum119895=1
(120572119895 minus 120572lowast119895 )120593119879 (X119895)120593 (X) + 119887
= 119897sum119895=1
(120572119895 minus 120572lowast119895 )119870 (X119895X) + 119887(5)
Here119870(X119895X) stands for the so-called kernel function Inthis paper the most commonly used kernel function namelythe Gaussian radial basis function (RBF) is adopted in theSVR modeling The RBF kernel function can be expressed as
119870(X119895X) = exp (minus120574 10038171003817100381710038171003817X119895 minus X100381710038171003817100381710038172) (6)
where 120574 denotes the width of the Gaussian RBF functionX119895 represents the jth input of the training sample set andX represents the input of the prediction data Here thecoefficient of 119886119895 119886lowast119895 and b can be obtained by severaliterations of the training sample set Now by tuning thepenalty factor C width of the RBF kernel function 120574 andtube size of 120576-insensitive loss function 120576 the SVR model canbe constructed to deal with the optimization problem of theSMP fixture locating layout
4 Multiobjective Optimization Based onSVR and NSGA-II
Multiobjective optimization always typically involves multi-ple conflicting objectives and does not have a feasible solutionthat minimizes or maximizes all objectives synchronouslyHence the final outcome of such a multiobjective opti-mization problem is a set of trade-off solutions betweendifferent objectives These trade-off points are termed asPareto optimal solutions which are not dominated by anyother solution and cannot be improved in the case of atleast one other objective without worsening The set of allthese feasible nondominated solutions is termed as Paretooptimal solution set and the corresponding objective valuesare named the Pareto front [22] Figure 3 demonstrates thePareto front for the optimization of two objectives of Obj-1and Obj-2
Recently it has been found that NSGA-II can convergenear to the real Pareto front and keep a good diversityof the population in the final Pareto optimal solution set[23 24] In this work the Pareto optimal solutions and thecorresponding Pareto front are obtained by NSGA-II which
Obj-1
Nondominated solutions
Pareto front
Dominated solutions
Ideal solutionlowastlowast
lowast
lowastlowast
lowastlowast
lowast
lowastlowast
lowast
lowast
Obj
-2
Figure 3 Pareto front for a two-objective optimization
was originally proposed by Deb et al [24] based on thenondominated sorting genetic algorithm (NSGA) [25] Thethree main features of NSGA-II are elitist strategy crowdingdistance and fast ranking of nondominated solutionsThere-fore so as to verify the feasibility and effectiveness of theproposed multiobjective optimization method integratingSVR and NSGA-II based on the ABAQUS [26] secondarydevelopment this paper uses Python language to compileFEAmodel of the parametric SMP fixture system to generatethe limited training and testing samples for SVR surrogatemodels and finally uses MATLAB language to compile theNSGA-II program to do the multiobjective optimization ofSMP fixture layout
ABAQUS can execute the finite element calculation byrunning a script file with the PY extension and store thepostprocessing results in a database file with the ODBextension MATLAB can read and modify the PY andODB files to achieve the connection and data transmissionbetween MATLAB language and ABAQUS software Thusthe information from optimization algorithm can be sentto finite element model by modifying the PY files and thedisplacement can be received from ABAQUS by reading theODB files The main steps of the multiobjective optimizationmethod are described as follows
Step 1 Generate the limited training and testing samples byLatin hypercube design (LHD) [27] and then calculate theresponding overall deformation and maximum deformationof the SMP under external forces with the help of theparametric FEA model
Step 2 Scale the training data set and testing data set into therange of [0 1] using the following normalization formula
1199091015840119894 = 119909119894 minus 119909min119909max minus 119909min (7)
where 119909119894 is the ith original data value 1199091015840119894 is the ith scaled datavalue and 119909max and 119909min are the upper and lower bound ofthe original data respectively
Mathematical Problems in Engineering 5
Yes
No
Execute a tournament selection
Implement crossover and mutation operators
Evaluate the dierent objectives for the merged population
Perform the nondominated sorting on the population
Output Pareto optimal solutions
End
Construct the initial SVR models for the overall and maximum deformation of SMP
Train and test the two SVR models
Satisfy theprediction accuracy
Build the nal SVR surrogate model for the overall and maximum deformation of SMP
Yes
No
Obtain the training and testing
Incr
ease
the t
rain
ing
sam
ples
Start
Evaluate the dierent objectives for the initial parent population
Perform the nondominated sorting on the individuals
Set the generation count t = 0
SVR
NSGA-II
Build a parametric FEA model using Python script interface
Tune
the
hype
rpar
amet
ers o
f SV
R
samples by LHD and FEA
Initialize the parent population P0
Merge the parent Pt and ospring population Qt
Apply elitism to select better individuals as the new parent population Pt+1
t = tGR
t=
t+1
Generate the ospring population Qt
Figure 4 Flowchart for multiobjective optimization of SMP fixture layout using SVR and NSGA-II
Step 3 Tune the SVR hyperparameters (C 120574 and 120576) andestablish the SVR prediction models to depict the nonlinearmapping relation between different fixture layout and thecorresponding SMP deformation
Step 4 Calculate and analyze the relative root mean squarederror (RRMSE) of the SVR models on the testing sample setThen increase training samples and repeat Steps 1ndash4 until theprediction accuracy is satisfied
Step 5 Initialize the parent population 1198750 of NSGA-II ran-domly and evaluate the population by calculating the objec-tives of each individual using the established SVR predictionmodels
Step 6 Perform the nondominated sorting on 1198750 and rankeach individual based on the dominance criteria
Step 7 Compute the crowding distances and sort the individ-uals
Step 8 Select individuals using a tournament selection andstore them in a temporary mating pool Then apply thecrossover and mutation operators to produce the offspringpopulation119874119905 where subscript t denotes the count of currentgeneration
Step 9 Merge the parent population 119875119905 and offspring popu-lation 119874119905 to generate a larger population and assign a fitnessvalue to each individual by a fast nondominated sorting
Step 10 Perform elitism to find the individuals with betterfitness from the merged population as the new parentpopulation 119875119905+1Step 11 Repeat Steps 8ndash10 until the maximum number ofiterations is reached (119905 = 119905max)
When the optimization process terminates the nondom-inated solutions of the final population are the approximatePareto optimal solutions with a good diversity Figure 4
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
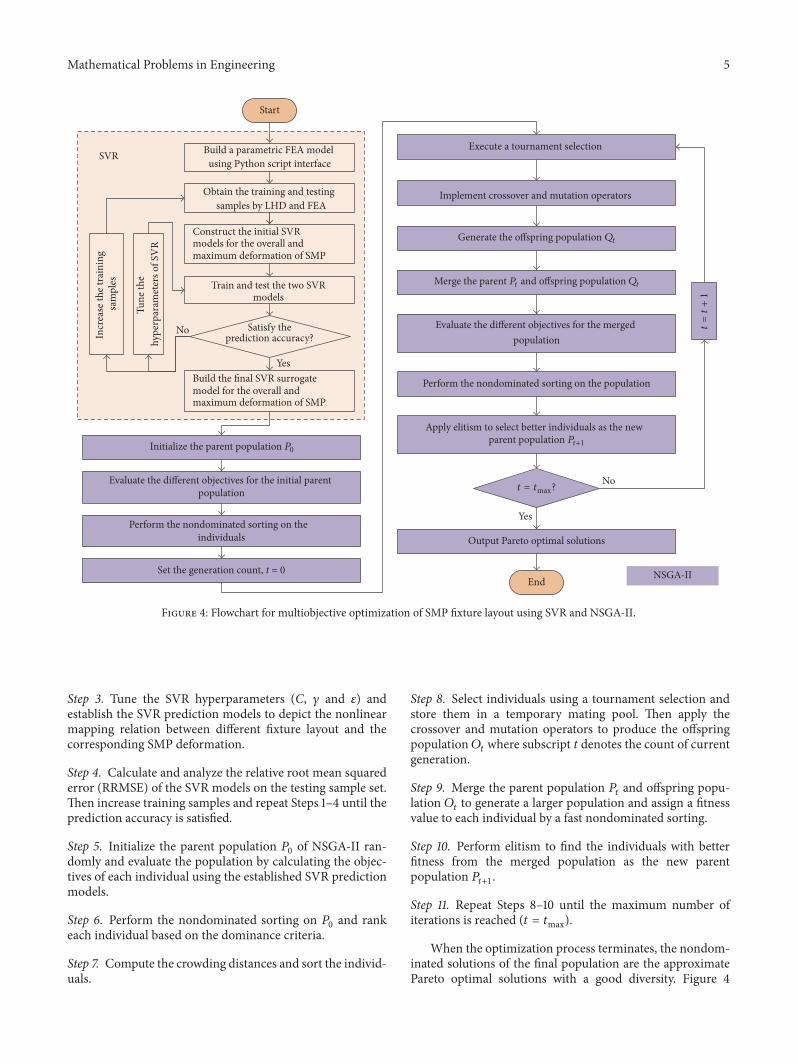
Mathematical Problems in Engineering 5
Yes
No
Execute a tournament selection
Implement crossover and mutation operators
Evaluate the dierent objectives for the merged population
Perform the nondominated sorting on the population
Output Pareto optimal solutions
End
Construct the initial SVR models for the overall and maximum deformation of SMP
Train and test the two SVR models
Satisfy theprediction accuracy
Build the nal SVR surrogate model for the overall and maximum deformation of SMP
Yes
No
Obtain the training and testing
Incr
ease
the t
rain
ing
sam
ples
Start
Evaluate the dierent objectives for the initial parent population
Perform the nondominated sorting on the individuals
Set the generation count t = 0
SVR
NSGA-II
Build a parametric FEA model using Python script interface
Tune
the
hype
rpar
amet
ers o
f SV
R
samples by LHD and FEA
Initialize the parent population P0
Merge the parent Pt and ospring population Qt
Apply elitism to select better individuals as the new parent population Pt+1
t = tGR
t=
t+1
Generate the ospring population Qt
Figure 4 Flowchart for multiobjective optimization of SMP fixture layout using SVR and NSGA-II
Step 3 Tune the SVR hyperparameters (C 120574 and 120576) andestablish the SVR prediction models to depict the nonlinearmapping relation between different fixture layout and thecorresponding SMP deformation
Step 4 Calculate and analyze the relative root mean squarederror (RRMSE) of the SVR models on the testing sample setThen increase training samples and repeat Steps 1ndash4 until theprediction accuracy is satisfied
Step 5 Initialize the parent population 1198750 of NSGA-II ran-domly and evaluate the population by calculating the objec-tives of each individual using the established SVR predictionmodels
Step 6 Perform the nondominated sorting on 1198750 and rankeach individual based on the dominance criteria
Step 7 Compute the crowding distances and sort the individ-uals
Step 8 Select individuals using a tournament selection andstore them in a temporary mating pool Then apply thecrossover and mutation operators to produce the offspringpopulation119874119905 where subscript t denotes the count of currentgeneration
Step 9 Merge the parent population 119875119905 and offspring popu-lation 119874119905 to generate a larger population and assign a fitnessvalue to each individual by a fast nondominated sorting
Step 10 Perform elitism to find the individuals with betterfitness from the merged population as the new parentpopulation 119875119905+1Step 11 Repeat Steps 8ndash10 until the maximum number ofiterations is reached (119905 = 119905max)
When the optimization process terminates the nondom-inated solutions of the final population are the approximatePareto optimal solutions with a good diversity Figure 4
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
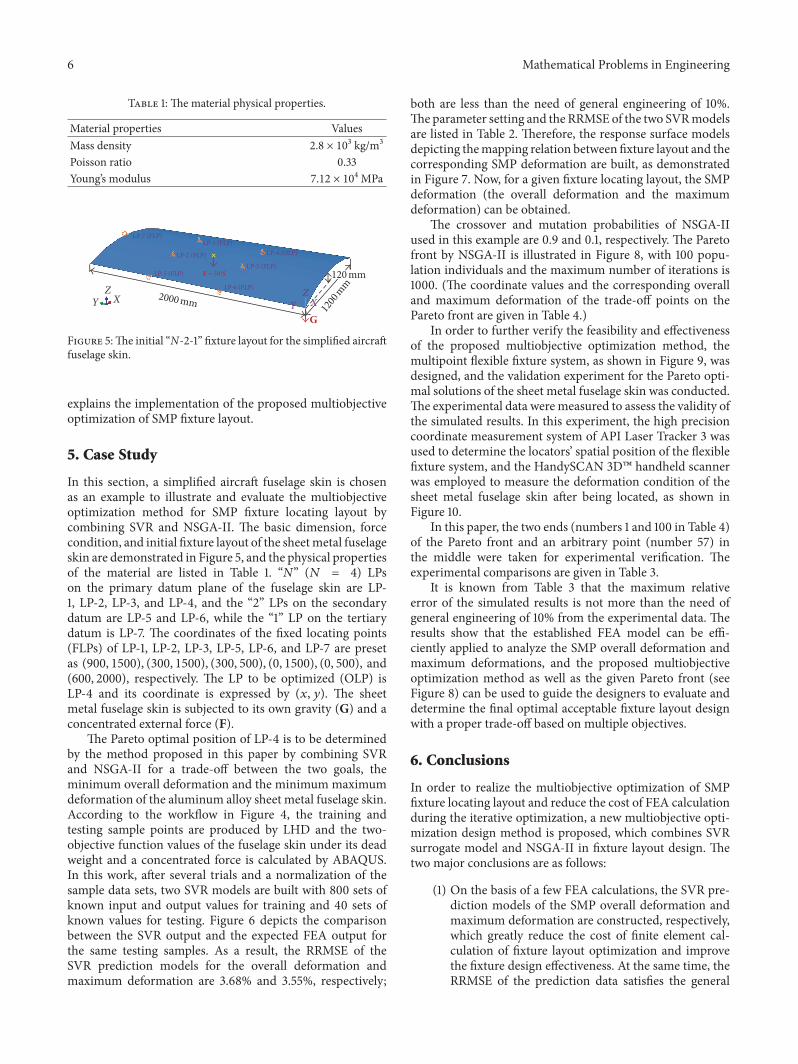
6 Mathematical Problems in Engineering
Table 1 The material physical properties
Material properties ValuesMass density 28 times 103 kgm3Poisson ratio 033Youngrsquos modulus 712 times 104MPa
2000 mm
1200
mm
120 mmF = 50 N
G
LP-7 (FLP)LP-1 (FLP)
LP-2 (FLP)
LP-5 (FLP)
LP-6 (FLP)
LP-3 (FLP)
LP-4 (OLP)
ZXY
ZXY
Figure 5The initial ldquoN-2-1rdquo fixture layout for the simplified aircraftfuselage skin
explains the implementation of the proposed multiobjectiveoptimization of SMP fixture layout
5 Case Study
In this section a simplified aircraft fuselage skin is chosenas an example to illustrate and evaluate the multiobjectiveoptimization method for SMP fixture locating layout bycombining SVR and NSGA-II The basic dimension forcecondition and initial fixture layout of the sheetmetal fuselageskin are demonstrated in Figure 5 and the physical propertiesof the material are listed in Table 1 ldquoNrdquo (119873 = 4) LPson the primary datum plane of the fuselage skin are LP-1 LP-2 LP-3 and LP-4 and the ldquo2rdquo LPs on the secondarydatum are LP-5 and LP-6 while the ldquo1rdquo LP on the tertiarydatum is LP-7 The coordinates of the fixed locating points(FLPs) of LP-1 LP-2 LP-3 LP-5 LP-6 and LP-7 are presetas (900 1500) (300 1500) (300 500) (0 1500) (0 500) and(600 2000) respectively The LP to be optimized (OLP) isLP-4 and its coordinate is expressed by (119909 119910) The sheetmetal fuselage skin is subjected to its own gravity (G) and aconcentrated external force (F)
The Pareto optimal position of LP-4 is to be determinedby the method proposed in this paper by combining SVRand NSGA-II for a trade-off between the two goals theminimum overall deformation and the minimum maximumdeformation of the aluminum alloy sheet metal fuselage skinAccording to the workflow in Figure 4 the training andtesting sample points are produced by LHD and the two-objective function values of the fuselage skin under its deadweight and a concentrated force is calculated by ABAQUSIn this work after several trials and a normalization of thesample data sets two SVR models are built with 800 sets ofknown input and output values for training and 40 sets ofknown values for testing Figure 6 depicts the comparisonbetween the SVR output and the expected FEA output forthe same testing samples As a result the RRMSE of theSVR prediction models for the overall deformation andmaximum deformation are 368 and 355 respectively
both are less than the need of general engineering of 10Theparameter setting and the RRMSE of the two SVRmodelsare listed in Table 2 Therefore the response surface modelsdepicting themapping relation between fixture layout and thecorresponding SMP deformation are built as demonstratedin Figure 7 Now for a given fixture locating layout the SMPdeformation (the overall deformation and the maximumdeformation) can be obtained
The crossover and mutation probabilities of NSGA-IIused in this example are 09 and 01 respectively The Paretofront by NSGA-II is illustrated in Figure 8 with 100 popu-lation individuals and the maximum number of iterations is1000 (The coordinate values and the corresponding overalland maximum deformation of the trade-off points on thePareto front are given in Table 4)
In order to further verify the feasibility and effectivenessof the proposed multiobjective optimization method themultipoint flexible fixture system as shown in Figure 9 wasdesigned and the validation experiment for the Pareto opti-mal solutions of the sheet metal fuselage skin was conductedThe experimental data weremeasured to assess the validity ofthe simulated results In this experiment the high precisioncoordinate measurement system of API Laser Tracker 3 wasused to determine the locatorsrsquo spatial position of the flexiblefixture system and the HandySCAN 3D handheld scannerwas employed to measure the deformation condition of thesheet metal fuselage skin after being located as shown inFigure 10
In this paper the two ends (numbers 1 and 100 in Table 4)of the Pareto front and an arbitrary point (number 57) inthe middle were taken for experimental verification Theexperimental comparisons are given in Table 3
It is known from Table 3 that the maximum relativeerror of the simulated results is not more than the need ofgeneral engineering of 10 from the experimental data Theresults show that the established FEA model can be effi-ciently applied to analyze the SMP overall deformation andmaximum deformations and the proposed multiobjectiveoptimization method as well as the given Pareto front (seeFigure 8) can be used to guide the designers to evaluate anddetermine the final optimal acceptable fixture layout designwith a proper trade-off based on multiple objectives
6 Conclusions
In order to realize the multiobjective optimization of SMPfixture locating layout and reduce the cost of FEA calculationduring the iterative optimization a new multiobjective opti-mization design method is proposed which combines SVRsurrogate model and NSGA-II in fixture layout design Thetwo major conclusions are as follows
(1) On the basis of a few FEA calculations the SVR pre-diction models of the SMP overall deformation andmaximum deformation are constructed respectivelywhich greatly reduce the cost of finite element cal-culation of fixture layout optimization and improvethe fixture design effectiveness At the same time theRRMSE of the prediction data satisfies the general
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Mathematical Problems in Engineering 7
Table 2 Experimental results of SVR prediction models
Penalty factor (C) Width of RBF kernelfunction (120574) Tube size of 120576-insensitive loss
function (120576) RRMSE
SVR model for 1198651 67 213 00171 368SVR model for 1198652 17 1645 002 355
Table 3 Comparison of simulated results with experimental data
Number Coordination Simulated results Experimental results Relative errors1198651mm 1198652mm 1198651mm 1198652mm 1198651 11986521 (8571263 640515) 1727699 6430427 16582 6125 41895 4986657 (8716877 6410927) 175448 6208433 19243 6562 8825 53881100 (8836917 6517052) 1819898 6161721 1978 6443 79917 43657
SVR prediction model output for the overall deformation
SVR prediction outputExpected output
0
5
10
15
20
25
30
35
40
45
50
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(a)
SVR prediction model output for the maximum deformation
SVR prediction outputExpected output
0
20
40
60
80
100
120
140
160
180
200
Out
put v
alue
(mm
)
5 10 15 20 25 30 35 400Testing sample set by LHD
(b)
Figure 6 Output curves of SVR prediction models for the overall and maximum deformation
0 200 400 600 800 1000 1200
x
Response surface of SVR prediction modelfor the overall deformation
y
20001500
1000500
0
0102030405060
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(a)0 200 400 600 800 1000 1200
0500
10001500
2000
x
Response surface of SVR prediction modelfor the maximum deformation
y
1500
0
50
100
150
200
Def
orm
atio
n ev
alua
tion
func
tion
valu
e (m
m)
(b)
Figure 7 Response surfaces of SVR prediction models for the overall and maximum deformation
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
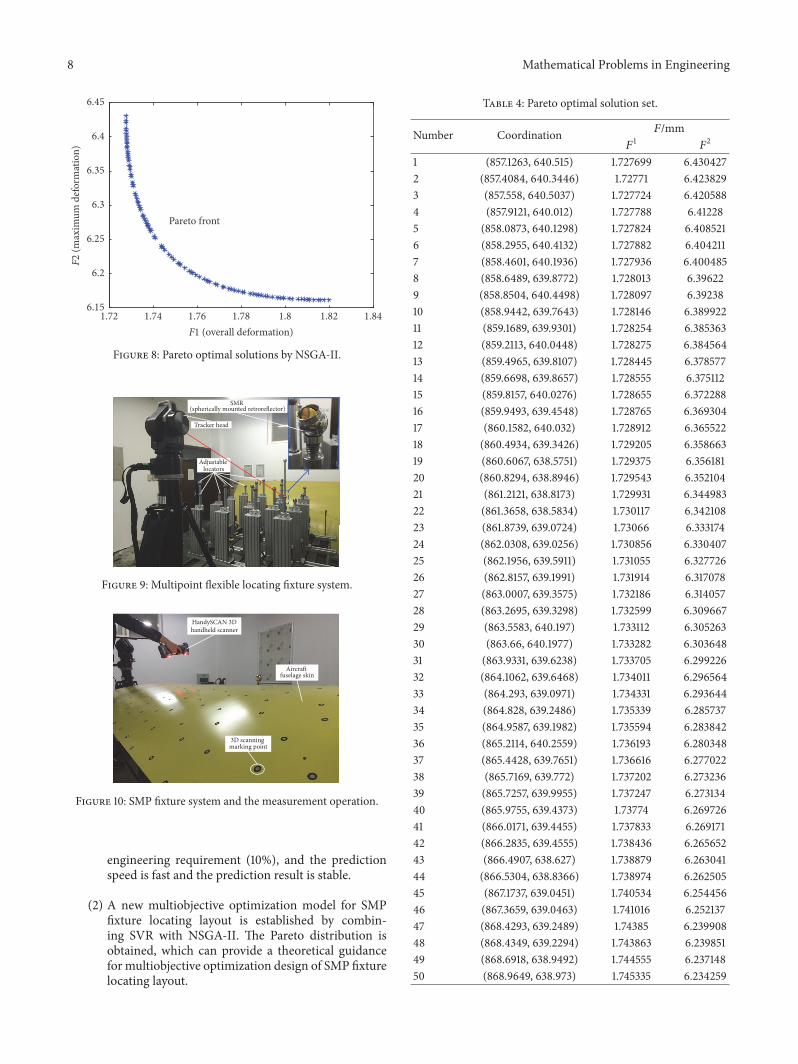
8 Mathematical Problems in Engineering
Pareto front
615
62
625
63
635
64
645
F2 (m
axim
um d
efor
mat
ion)
174 176 178 18 182 184172F1 (overall deformation)
Figure 8 Pareto optimal solutions by NSGA-II
Adjustable locators
Tracker head
SMR (spherically mounted retroreector)
Figure 9 Multipoint flexible locating fixture system
3D scanning marking point
Aircra fuselage skin
HandySCAN 3$handheld scanner
Figure 10 SMP fixture system and the measurement operation
engineering requirement (10) and the predictionspeed is fast and the prediction result is stable
(2) A new multiobjective optimization model for SMPfixture locating layout is established by combin-ing SVR with NSGA-II The Pareto distribution isobtained which can provide a theoretical guidancefor multiobjective optimization design of SMP fixturelocating layout
Table 4 Pareto optimal solution set
Number Coordination 119865mm1198651 11986521 (8571263 640515) 1727699 64304272 (8574084 6403446) 172771 64238293 (857558 6405037) 1727724 64205884 (8579121 640012) 1727788 6412285 (8580873 6401298) 1727824 64085216 (8582955 6404132) 1727882 64042117 (8584601 6401936) 1727936 64004858 (8586489 6398772) 1728013 6396229 (8588504 6404498) 1728097 63923810 (8589442 6397643) 1728146 638992211 (8591689 6399301) 1728254 638536312 (8592113 6400448) 1728275 638456413 (8594965 6398107) 1728445 637857714 (8596698 6398657) 1728555 637511215 (8598157 6400276) 1728655 637228816 (8599493 6394548) 1728765 636930417 (8601582 640032) 1728912 636552218 (8604934 6393426) 1729205 635866319 (8606067 6385751) 1729375 635618120 (8608294 6388946) 1729543 635210421 (8612121 6388173) 1729931 634498322 (8613658 6385834) 1730117 634210823 (8618739 6390724) 173066 633317424 (8620308 6390256) 1730856 633040725 (8621956 6395911) 1731055 632772626 (8628157 6391991) 1731914 631707827 (8630007 6393575) 1732186 631405728 (8632695 6393298) 1732599 630966729 (8635583 640197) 1733112 630526330 (86366 6401977) 1733282 630364831 (8639331 6396238) 1733705 629922632 (8641062 6396468) 1734011 629656433 (864293 6390971) 1734331 629364434 (864828 6392486) 1735339 628573735 (8649587 6391982) 1735594 628384236 (8652114 6402559) 1736193 628034837 (8654428 6397651) 1736616 627702238 (8657169 639772) 1737202 627323639 (8657257 6399955) 1737247 627313440 (8659755 6394373) 173774 626972641 (8660171 6394455) 1737833 626917142 (8662835 6394555) 1738436 626565243 (8664907 638627) 1738879 626304144 (8665304 6388366) 1738974 626250545 (8671737 6390451) 1740534 625445646 (8673659 6390463) 1741016 625213747 (8684293 6392489) 174385 623990848 (8684349 6392294) 1743863 623985149 (8686918 6389492) 1744555 623714850 (8689649 638973) 1745335 6234259
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
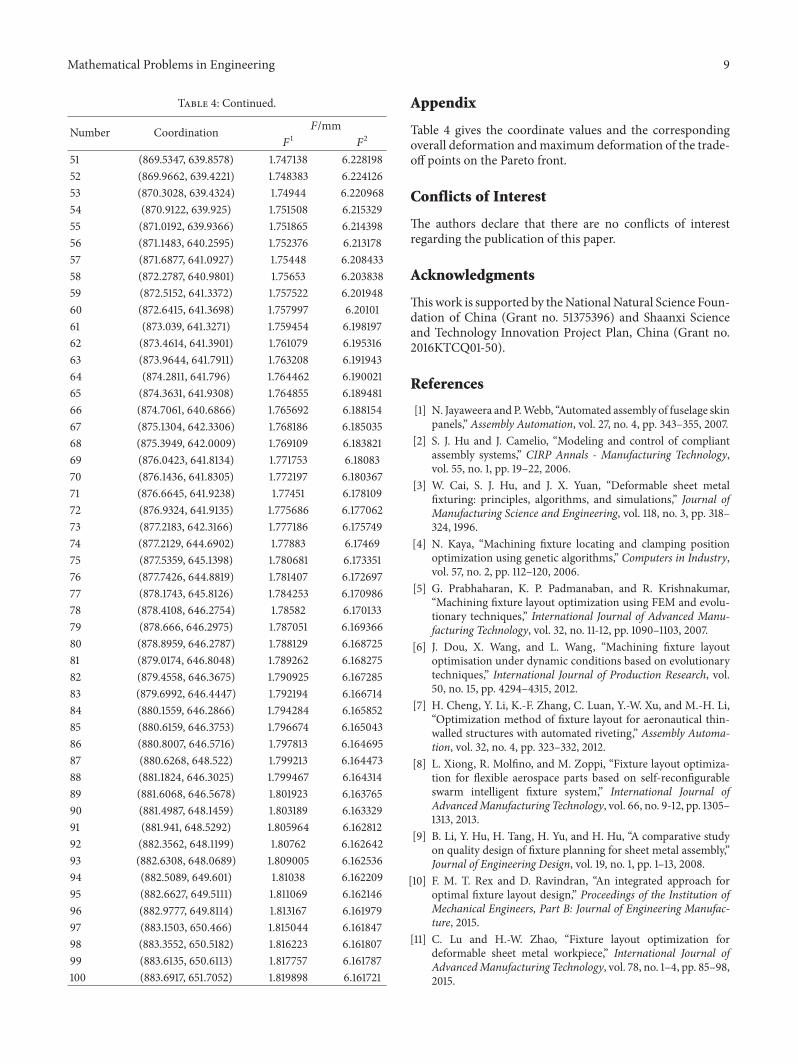
Mathematical Problems in Engineering 9
Table 4 Continued
Number Coordination 119865mm1198651 119865251 (8695347 6398578) 1747138 622819852 (8699662 6394221) 1748383 622412653 (8703028 6394324) 174944 622096854 (8709122 639925) 1751508 621532955 (8710192 6399366) 1751865 621439856 (8711483 6402595) 1752376 621317857 (8716877 6410927) 175448 620843358 (8722787 6409801) 175653 620383859 (8725152 6413372) 1757522 620194860 (8726415 6413698) 1757997 62010161 (873039 6413271) 1759454 619819762 (8734614 6413901) 1761079 619531663 (8739644 6417911) 1763208 619194364 (8742811 641796) 1764462 619002165 (8743631 6419308) 1764855 618948166 (8747061 6406866) 1765692 618815467 (8751304 6423306) 1768186 618503568 (8753949 6420009) 1769109 618382169 (8760423 6418134) 1771753 61808370 (8761436 6418305) 1772197 618036771 (8766645 6419238) 177451 617810972 (8769324 6419135) 1775686 617706273 (8772183 6423166) 1777186 617574974 (8772129 6446902) 177883 61746975 (8775359 6451398) 1780681 617335176 (8777426 6448819) 1781407 617269777 (8781743 6458126) 1784253 617098678 (8784108 6462754) 178582 617013379 (878666 6462975) 1787051 616936680 (8788959 6462787) 1788129 616872581 (8790174 6468048) 1789262 616827582 (8794558 6463675) 1790925 616728583 (8796992 6464447) 1792194 616671484 (8801559 6462866) 1794284 616585285 (8806159 6463753) 1796674 616504386 (8808007 6465716) 1797813 616469587 (8806268 648522) 1799213 616447388 (8811824 6463025) 1799467 616431489 (8816068 6465678) 1801923 616376590 (8814987 6481459) 1803189 616332991 (881941 6485292) 1805964 616281292 (8823562 6481199) 180762 616264293 (8826308 6480689) 1809005 616253694 (8825089 649601) 181038 616220995 (8826627 6495111) 1811069 616214696 (8829777 6498114) 1813167 616197997 (8831503 650466) 1815044 616184798 (8833552 6505182) 1816223 616180799 (8836135 6506113) 1817757 6161787100 (8836917 6517052) 1819898 6161721
Appendix
Table 4 gives the coordinate values and the correspondingoverall deformation andmaximum deformation of the trade-off points on the Pareto front
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (Grant no 51375396) and Shaanxi Scienceand Technology Innovation Project Plan China (Grant no2016KTCQ01-50)
References
[1] N Jayaweera andPWebb ldquoAutomated assembly of fuselage skinpanelsrdquo Assembly Automation vol 27 no 4 pp 343ndash355 2007
[2] S J Hu and J Camelio ldquoModeling and control of compliantassembly systemsrdquo CIRP Annals - Manufacturing Technologyvol 55 no 1 pp 19ndash22 2006
[3] W Cai S J Hu and J X Yuan ldquoDeformable sheet metalfixturing principles algorithms and simulationsrdquo Journal ofManufacturing Science and Engineering vol 118 no 3 pp 318ndash324 1996
[4] N Kaya ldquoMachining fixture locating and clamping positionoptimization using genetic algorithmsrdquo Computers in Industryvol 57 no 2 pp 112ndash120 2006
[5] G Prabhaharan K P Padmanaban and R KrishnakumarldquoMachining fixture layout optimization using FEM and evolu-tionary techniquesrdquo International Journal of Advanced Manu-facturing Technology vol 32 no 11-12 pp 1090ndash1103 2007
[6] J Dou X Wang and L Wang ldquoMachining fixture layoutoptimisation under dynamic conditions based on evolutionarytechniquesrdquo International Journal of Production Research vol50 no 15 pp 4294ndash4315 2012
[7] H Cheng Y Li K-F Zhang C Luan Y-W Xu and M-H LildquoOptimization method of fixture layout for aeronautical thin-walled structures with automated rivetingrdquo Assembly Automa-tion vol 32 no 4 pp 323ndash332 2012
[8] L Xiong R Molfino and M Zoppi ldquoFixture layout optimiza-tion for flexible aerospace parts based on self-reconfigurableswarm intelligent fixture systemrdquo International Journal ofAdvancedManufacturing Technology vol 66 no 9-12 pp 1305ndash1313 2013
[9] B Li Y Hu H Tang H Yu and H Hu ldquoA comparative studyon quality design of fixture planning for sheet metal assemblyrdquoJournal of Engineering Design vol 19 no 1 pp 1ndash13 2008
[10] F M T Rex and D Ravindran ldquoAn integrated approach foroptimal fixture layout designrdquo Proceedings of the Institution ofMechanical Engineers Part B Journal of Engineering Manufac-ture 2015
[11] C Lu and H-W Zhao ldquoFixture layout optimization fordeformable sheet metal workpiecerdquo International Journal ofAdvancedManufacturing Technology vol 78 no 1ndash4 pp 85ndash982015
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
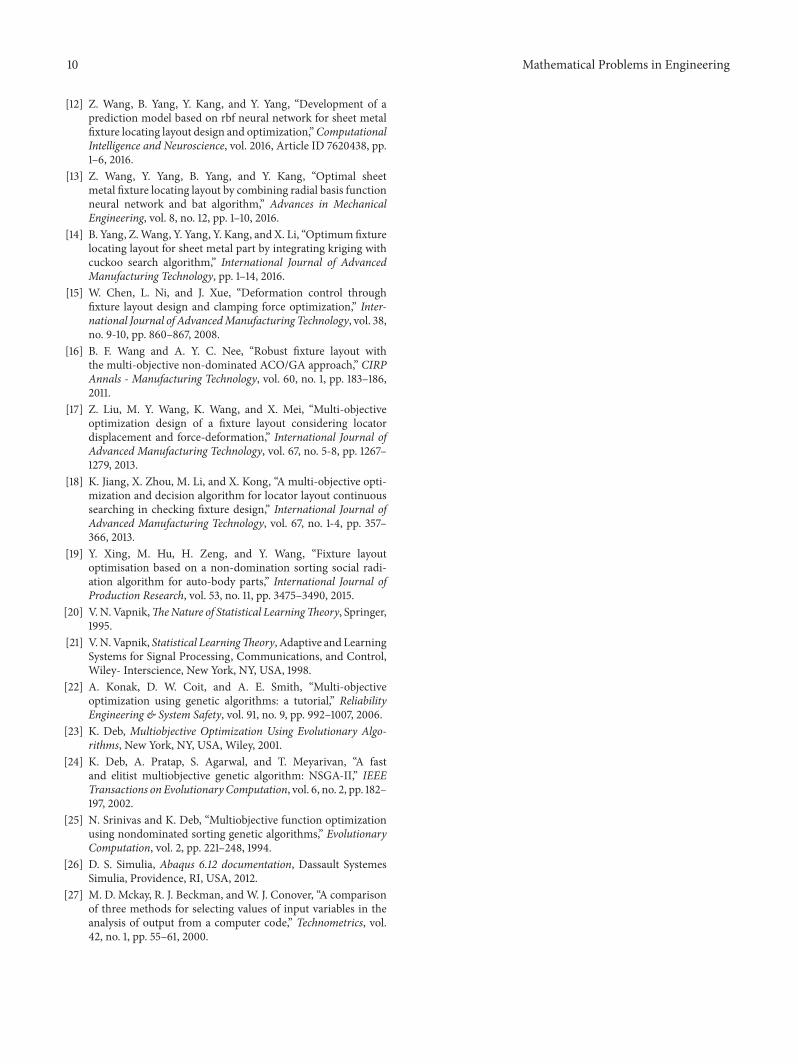
10 Mathematical Problems in Engineering
[12] Z Wang B Yang Y Kang and Y Yang ldquoDevelopment of aprediction model based on rbf neural network for sheet metalfixture locating layout design and optimizationrdquoComputationalIntelligence and Neuroscience vol 2016 Article ID 7620438 pp1ndash6 2016
[13] Z Wang Y Yang B Yang and Y Kang ldquoOptimal sheetmetal fixture locating layout by combining radial basis functionneural network and bat algorithmrdquo Advances in MechanicalEngineering vol 8 no 12 pp 1ndash10 2016
[14] B Yang ZWang Y Yang Y Kang and X Li ldquoOptimumfixturelocating layout for sheet metal part by integrating kriging withcuckoo search algorithmrdquo International Journal of AdvancedManufacturing Technology pp 1ndash14 2016
[15] W Chen L Ni and J Xue ldquoDeformation control throughfixture layout design and clamping force optimizationrdquo Inter-national Journal of AdvancedManufacturing Technology vol 38no 9-10 pp 860ndash867 2008
[16] B F Wang and A Y C Nee ldquoRobust fixture layout withthe multi-objective non-dominated ACOGA approachrdquo CIRPAnnals - Manufacturing Technology vol 60 no 1 pp 183ndash1862011
[17] Z Liu M Y Wang K Wang and X Mei ldquoMulti-objectiveoptimization design of a fixture layout considering locatordisplacement and force-deformationrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 5-8 pp 1267ndash1279 2013
[18] K Jiang X Zhou M Li and X Kong ldquoA multi-objective opti-mization and decision algorithm for locator layout continuoussearching in checking fixture designrdquo International Journal ofAdvanced Manufacturing Technology vol 67 no 1-4 pp 357ndash366 2013
[19] Y Xing M Hu H Zeng and Y Wang ldquoFixture layoutoptimisation based on a non-domination sorting social radi-ation algorithm for auto-body partsrdquo International Journal ofProduction Research vol 53 no 11 pp 3475ndash3490 2015
[20] VN VapnikTheNature of Statistical LearningTheory Springer1995
[21] VNVapnik Statistical LearningTheory Adaptive and LearningSystems for Signal Processing Communications and ControlWiley- Interscience New York NY USA 1998
[22] A Konak D W Coit and A E Smith ldquoMulti-objectiveoptimization using genetic algorithms a tutorialrdquo ReliabilityEngineering amp System Safety vol 91 no 9 pp 992ndash1007 2006
[23] K Deb Multiobjective Optimization Using Evolutionary Algo-rithms New York NY USA Wiley 2001
[24] K Deb A Pratap S Agarwal and T Meyarivan ldquoA fastand elitist multiobjective genetic algorithm NSGA-IIrdquo IEEETransactions on Evolutionary Computation vol 6 no 2 pp 182ndash197 2002
[25] N Srinivas and K Deb ldquoMultiobjective function optimizationusing nondominated sorting genetic algorithmsrdquo EvolutionaryComputation vol 2 pp 221ndash248 1994
[26] D S Simulia Abaqus 612 documentation Dassault SystemesSimulia Providence RI USA 2012
[27] M D Mckay R J Beckman andW J Conover ldquoA comparisonof three methods for selecting values of input variables in theanalysis of output from a computer coderdquo Technometrics vol42 no 1 pp 55ndash61 2000
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of