Embed Size (px)
Citation preview

My Research Activities in Control Theory and Engineering: An OverviewQing-Chang Zhong
Department of Electrical Engineering and ElectronicsThe University of Liverpool
AbstractMy research activities have been focusing on control theory and con-
trol engineering. On the theoretical side, siginificant contributions
have been made towards time-delay systems, algebraic Ricatti equa-
tions, J -spectral facotrisation and infinite-dimensional systems. On
the application side, the focus is on power electronics and renew-
able energy, automotive electronics, rapid control prototyping and
hardware-in-the-loop simulation, embedded systems etc.
1. Research on Control Theory
Algebraic Riccati equation and similarity transformation
Let A, R and E be real n×n matrices with R and E symmetric. The
following equation is called an algebraic Riccati equation (ARE):
[
− X I]
H
[
I
X
]
= 0 (1)
with H =[
A R
−E −A∗
]
called a Hamiltonian matrix.
Lemma 1 Suppose that H has no imaginary eigenvalues. Then
a stabilising solution X = Ric(H) exists if and only if the (1, 1)-
block X1 of T in the following similarity transformation is non-
singular:
T−1HT =
[
A− ?
0 ?
]
,
Furthermore, X = X2X−11 .
The formula (1), together with
AX =[
I 0]
H
[
I
X
]
, (2)
can be represented by the block diagram shown below. This can be
used to simplify the relationship between algebraic Riccati equations.
H XX
+ -
U
V
W
Y
U1
V1=0
W1
Y1 (=0)
Lemma 2 Let H =[
A R
−E −A∗
]
be a Hamiltonian matrix with X =
Ric(H) and P be the solution of the Lyapunov equation
AXP + PA∗X + R = 0,
where AX = A + RX is stable. Then the nonsingular matrix
T =
[
I 0
X I
] [
I P
0 I
]
=
[
I P
X I + XP
]
similarly transforms H into the block diagonal form given below:
T−1HT =
[
AX 0
0 −A∗X
]
.
A stabilising solution X does not stabilise A, but group all the stable
eigenvalues into AX .
J-spectral factorisation
J -spectral factorisation is defined as
Λ(s) = W∼(s)JW (s),
where the J -spectral factor W (s) is bistable and Λ(s) is a para-
Hermitian matrix: Λ(s) = Λ∼(s).= ΛT (−s). Assume that Λ, having
no poles or zeros on the jω-axis including ∞, is realised as
Λ =
[
Hp BΛ
CΛ D
]
= D + CΛ(sI − Hp)−1BΛ (3)
and denote the A-matrix of Λ−1as Hz, i.e.,
Hz = Hp − BΛD−1CΛ.
There always exist nonsingular matrices ∆p and ∆z (e.g. via Schur
decomposition) such that
∆−1p Hp∆p =
[
? 0
? A+
]
and
∆−1z Hz∆z =
[
A− ?
0 ?
]
,
where A+ is antistable and A− is stable (A+ and A− have the same
dimension).
Lemma 3 Λ admits a J-spectral factorisation if and only if there
exists a nonsingular matrix ∆ such that
∆−1Hp∆ =
[
Ap− 0
? Ap+
]
, ∆−1Hz∆ =
[
Az− ?
0 Az+
]
where Az− and A
p− are stable, and Az
+ and Ap+ are antistable.
When this condition is satisfied, a J-spectral factor W is given
as
W =
[
I 0]
∆−1Hp∆
[
I
0
]
[
I 0]
∆−1BΛ
Jp,qD−∗W CΛ∆
[
I
0
]
DW
, (4)
where DW is a nonsingular solution of D∗WJp,qDW = D.
One possible ∆ is
∆ =[
∆z
[
I
0
]
∆p
[
0I
] ]
.
The Delay-type Nehari problem
Given a minimal state-space realisation Gβ =[
A B
−C 0
]
, which is not
necessarily stable, and h ≥ 0, characterise the optimal value
γopt = inf{∥
∥Gβ(s) + e−shK(s)∥
∥
L∞ : K(s) ∈ H∞}
and for a given γ > γopt, parametrise the suboptimal set of proper
K ∈ H∞ such that∥
∥Gβ(s) + e−shK(s)∥
∥
L∞ < γ.
The optimal value γopt is
γopt = max{γ : det Σ22 = 0},
with
Σ22 =[
−Lc I]
Σ
[
Lo
I
]
,
where Lo and Lc are stabilising solutions, respectively, to
[
−Lc I]
[
A γ−2BB∗
0 −A∗
] [
I
Lc
]
= 0,
[
I −Lo
]
[
A 0
−C∗C −A∗
] [
Lo
I
]
= 0.
Σ =
[
Σ11 Σ12
Σ21 Σ22
]
= exp(
[
A γ−2BB∗
−C∗C −A∗
]
h)
The block diagram of K is shown below.
����
Gβ Z
e−shI
W−1
����
Q
K@
@@
�
-
-
u
y
z
w
�
-
��
6
6
6
?
?
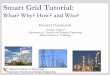
Example: Gβ(s) = − 1s−a
(a > 0)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ah
aγ
aγopt
Since I − LcLo = 1 − 4a2γ2, there is∥
∥
∥ΓGβ
∥
∥
∥= 1
2a. As a result, the
optimal value γopt satisfies 0.5 ≤ aγopt ≤ 1.
The standard H∞ problem of single-delay systems
Given a γ > 0, find a proper controller K such that the closed-loop
system is internally stable and∥
∥Fl(P, Ke−sh)∥
∥
∞< γ.
P
e−shI
K
�
� �
�
y
z
u
w
u1
-
The problem can be simplified as shown below.
Cr(P )
@@@ e−shI
K
-
� � �
w
z u
y
u1
6
Cr(P )
@@@
Gα
@@@
Cr(Gβ)
@@@ e−shI
K
Delay-free problem 1-block delay problem
-
�
-
�
-
� � �
w
z u
y
u1
6
w1
z1
y
u1
Gα is the controller generator of the delay-free problem. Gβ is defined
such that Cr(Gβ).= G−1
α . Gα and Cr(Gβ) are all bistable.
Solvability ⇐⇒ :
• H0 ∈ dom(Ric) and X = Ric(H0) ≥ 0;
• J0 ∈ dom(Ric) and Y = Ric(J0) ≥ 0;
• ρ(XY ) < γ2;
• γ > γh, where γh = max{γ : det Σ22 = 0}.
Z V −1
����
Q
@@@
--
u
y-
��
6
?
?
V −1 =
A + B2C1 B2 − Σ12Σ−122 C∗
1 Σ−∗22 B1
C1 I 0−γ−2B∗
1Σ∗21 − C2Σ
∗22 0 I
Implementation of the controller
As seen above, the control laws associated with delay systems nor-
mally include a distributed delay like
v(t) =
∫ h
0
eAζBu(t − ζ)dζ,
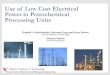
or Z(s) = (I − e−(sI−A)h) · (sI − A)−1inthes−domain.
The implementation of Z is not trivial because A may be unstable.
This problem had confused the delay community for several years
and was proposed as an open problem in Automatica in 2003. It was
reported that the quadrature implementation might cause instability
however accurate the implementation is.
My investigation shows that: The quadrature approximation error
converges to 0 in the sense of H∞-norm.
10−2
10−1
100
101
102
103
10−4
10−3
10−2
10−1
100
101
Frequency (rad/sec)
N=1
N=5
N=20
App
roxi
mat
ion
erro
r
Rational implementation
1x2xΠ
Nx 1−Nx
B1−Φbu
u
rv
…
ΦΦ+−=Π −1)( AsI
Π Π
…
Π = (sI − A + Φ)−1Φ, Φ = (∫ h
N0 e−Aζdζ)−1.
Feedback stabilisation of delay systems
The feedback stabilizability of the state–input delay system
x(t) = A0x(t) + A1x(t − r) + Pu(t) + P1u(t − r)
is equivalent to the condition
Rank[
(P + e−rλiP1)∗ · ϕi
]
= di, i = 1, 2, · · · , l.
where λi ∈ {λ1, λ2, · · · , λl} = {λ ∈ C : det∆(λ) = 0 and Reλ ≥ 0}
with ∆(λ) := λI − A0 − A1e−rλ. The dimension of Ker∆(λi)
∗ is di
and the basis of Ker∆(λi)∗ is ϕi
1, ϕi2, · · · , ϕ
idi
for i = 1, 2, · · · , l .
2. Research on control engineering
Power electronics & renewable energy
Control problems involved in distributed generation
• voltage control: e = Vref − Vc as small as possible
• neutral point control: to provide a non-drifting neutral point
• power control: to regulate the active/reactive power
• phase-locked loop (PLL): to synchronise the converter with the
grid
Voltage control of DC-AC converters
The single-phase circuit:
The objective is to make sure that the output voltage Vout or Vc is
a clean sinusoidal signal even when the load is nonlinear and/or the
public grid is polluted with harmonics.
Structure of voltage controller
Techniques used:
• H∞ control
• Repetitive control, where a delay is introduced into the controller
Nyquist plot of the system
−2 −1 0 1 2 3 4 5 6−8
−6
−4
−2
0
2
4
6
8−L(jω)
Re
Im
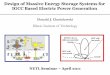
Simulation results
0 0.05 0.1 0.15 0.2−400
−300
−200
−100
0
100
200
300
400
Time (sec)
Vol
tage
(v)
Vc e
0.36 0.37 0.38 0.39 0.4−400
−300
−200
−100
0
100
200
300
400
Vol
tage
(V
) micro−grid
(external) grid
Time (sec)
(a) Transient response (b) Steady-state response
Neutral-point control
Control objective is to force ic ≈ 0 so that the point N will be the
mid-point of DC supply.
• No need to re-design the converter;
• The controller is decoupled.
H∞ control design
Experimental results
Vave
0.2V/div
iN
50A/div
iL
50A/div
ic
20A/div
0.17 0.18 0.19 0.20 0.21 0.22 0.23 0.24 0.25 0.26 0.27
Time (sec)
Regulation of induction generators for wind power
Q
P
Control of wind turbines
Patented by Nheolis, France
Experiments show that the new wind turbine is very efficient. The
maximum mechanical power of a prototype with a 2m (diameter)
rotor reached 12kW at a wind speed of 20m/s. The nominal power
is 4.1kW at 14 m/s. A 1-meter 3-bladed prototype recorded 2.8kW
mechanical power at 14 m/s. This is much more efficient than any
commercial wind turbines available.
Damping control of inter-area oscillations in large-scale
power systems
AC-DC converters: DC drives
AC-DC-AC converters: AC drives
Philips Semiconductors
VVVF speed control by:
• using the PWM circuit HEF4752V shown above
• using Intel 8051 microcomputer to generate space vector PWM
signal
Rapid control prototyping & hardware-in-the-loop sim-
ulation
dSPACE+Matlab/Simulink/SimPower
• Single-board PCI hardware for use in PCs
• powerful development system for RCP
• Real-Time Interface provides Simulink r© blocks for graphical con-
figuration of A/D, D/A, digital I/O lines, incremental encoder
interface and PWM generation
Embedded systems
Different development kits for embedded control:
• MPC5567
• EasyPIC4
• dsPICPro2
• LabJack U12
Chemical process control
3. Practical experiences
• Software design
– Intel 8086 assembly language: ¿ 100kB binary code
– C language: ¿ 10,000 lines
– Database/Javascript
• Hardware design
– Micro-computers: Intel 8051, Zilog Z80, Motorola ...
– DC, AC drives etc
– Lift control systems
– System design experience
4. EPSRC-funded New-ACE
Leading a nation-wide collaborative network: New-ACE.
• Partners: Imperial, Sheffield, Loughborough and Queen’s
Belfast.
• Advisory members: D.J.N. Limebeer (Imperial),
D.H. Owens (Sheffield), R.M. Goodall (Loughborough),
G. Irwin (Queen’s Belfast), Q.H. Wu (Liverpool).
• Main activities and outcomes:
– to organise six workshops in subject areas including renewable
energy and control in power electronics
– to submit 6˜12 joint proposals in the coming three years.
5. Current funded projects
• EPSRC: EP/C005953/1, 126k
• EPSRC: EP/E055877/1, 88k
• EPSRC: one DTA studentship
• EPSRC and Add2: Dorothy Hodgkin Postgraduate Award, 90k
• ESPRC and Nheolis: Dorothy Hodgkin Postgraduate Award, 90k
6. Future research topics
Control Theory
• Industrial collaboration to consolidate research: CHP and auto-
motive electronics
• Theoretical research to deepen the depth of research
Acknowledgement
The support from EPSRC, Add2 Ltd and Nheolis, France is greatly
appreciated.





![FLEX FUEL GASIFIER SIMULATION MODEL [FFGSM]mypages.iit.edu/~abbasian/documents/ffgsm_user_manual.pdf · 6) Gasifier Tab: This tab opens the Gasifier Panel where the gasifier input](https://img.pdfslide.net/doc/110x75/5eb664fad746ec31aa42c957/flex-fuel-gasifier-simulation-model-ffgsm-abbasiandocumentsffgsmusermanualpdf.jpg)