Embed Size (px)
Citation preview

•
.,,
. ,
CR_113448NASA-19840020468
A Reproduced CopyOF
________-....ll."h- - __
Reproduced for NASA
by the
NASA Scientific and Technical Information Facility
LIBRARY COpyr ,- R ,. '\ 'co!=:! \-; ~. 1 Iv;)J
LANGLEY RESEARCH CENTERLISRARY, NASA
HAM~TOr!,. VIRGI['iIA
FFNo 672 Aug 65
r
https://ntrs.nasa.gov/search.jsp?R=19840020468 2018-07-07T03:45:29+00:00Z

.~
•
',I.
,:.;••1
. ..
18,.-28531·
Prepared for theNat10nal Aeronautics and Space Ad.inistrationlangley Research CenterHaMPton, Virginia 23665
Progress ReportFor the period OCtober I, 1982 to "'rn IS, 1984
8y
Roland R. ~elke, Principal Investigator
Leonard J. Tung, Co-Pr1ncipal Investigator
and
Preston I. Clrraway II I
DEPARTMENT OF ELECTRICAL ENGIMEERlfCGSCHOOL OF ENGINEERINGOlD DeU"Im. UMlYERSlnHORfOLK, VIRGiNIA
tblderResearch Grant N5G-1650R~n L. Jones, Techn1cal ftlnitorFlight D,ynasics and Control Division
OESIGM OF ....LTI VAlUABlE FEEDBACK CO?tTROl SYSTEMSVIA SPECTRAL ASSl~ENT USIKG RE~EO-ORDERMODELS NCO REOUCED-oROER 08S£RYERS
•
May 1984
(MlSA-ca-11JQQ8) DBSIGM OF aOtTI'AaLABLI'EEDOACI COITiOL 5IST!!S 'IA SPlctaAL
~ASSIGJUSBMT USING UDOCID-OIDII ISODIU.S A'D
'. RBDUCED-OBDIR ObSEa'aBS Fiaal Progress Oacl.. ~
" _~___ Bepo,,~, 1 oct,: 1981 - 101d 00...108 OaLY., ''':;;~_:;;.:i.]lF ' - l:J
,. .'.
t.,- < . ~- ,-'
\

fl
1,
...
1,
".
..I'
.. ~
....... ,. ~ l'
DEPARTMENT OF ELECTRICAL ENGINEERINGSCHOOL OF ENGINEERINGOLD DOMINION UNIVERSITYNORFOLK, VIRGI"IA
DESIGN OF MULTI VARIABLE FEEDBACK CONTROL SYSTEMSVIA SPECTRAL ASSIGNMENT USING REDUCED-ORDERMODELS AND REDUCED-QROER OBSERVERS
By
Roland R. Mielke, Principal Investigator
Leonard J. Tung, Co-Principal Investigator
and
Preston I. carraway 111
Progress ReportFor the period OCtober I, 1982 to April IS, 1984
Prepared for theNational Aeronautics and Space AdministrationLangley Research CenterHampton, Virginia 23665
UnderResearch Grant NSG-1650Ruben L. Jones, Technical MonitorFl ight Dynamics and Control Division
Submitted by theOld Dominion Lniversity Research FoundationP. O. Box 6369Norfolk, Virginia 23508
May 1984

1
t
ABSTRACT
DESIGN OF MULTI VARIABLE FEEDBACK CONTROL SYSTEMS VIA SPECTRALASSIGNMENT USING REDUCED-ORDER MODELS AND REDUCED-ORDER OBSERVERS
Preston Ivanhoe Carraway III
Roland R. Mielke, Principal Investigator andLeonard J. Tung, Co-Principal Investigator
The feasibility of using reduced-order models and reduced-order
observers with eigenvalue/eigenvector assignment procedures is in~esti
gated. Areview of spectral assignment synthesis pr.ocedures is present
ed. Then, a reduced-order model which retains essential system charac
teristics is formulated. Aconstant state feedback matrix which assigns
desired closed loop eigenvalues and approximates specified closed loop
eigenvectors is calculated for the reduced-order model. It is shown
that the eigenvalue and eige~vector assignments made in the reduced
order system are retained when the feedback matrix is ilnplemented about
the full order system. In addition, those modes and associated eigen
vectors which are not included in the reduced-order model remain un-
changed in the closed loop full-order system. The full state feedback
design is then implemented by using a reduced-order observer. It is
shown that the eigenvalue and eigenvector assignments of the closed loop
full-order system remain unchanged when a reduced-order observer is
used. The d~sign procedure is illustrated by an actual design problem.
11
' ..
\,I
J.
....•~

, TABLE OF CONTENTS
Page
ABSTRACT•••••••••••••••••••••••••••••••••••••••••••••••••••••••• it
LIST OF FIGURES ••••••••••••••••••••••••••••••••••••••••••••••• " v
LIST OF SyMrOLS••••••••••••••••••••••••••••••••••••••••••••••••• viti
Chapter
1 INTRODUCTION••••••••••••••••••••••••••••••••••••••••••••••• 1
1.1 MOtivation•••••••••••••••••••••••••••••••••••••••••••• 11.2 Overview•••••••••••••••••••••••••••••••••••••••••••••• 3
2 SPECTRAL ASSIGNMENT PROCEDURE•••••••••••••••••••••••••••••• 5
2.1 System Eigenstructure and Time Response••••••••••••••• 52.2 Characterization of Freedom of Eigenvector
Ass 19nrnent•••••••••••••••••••••••••••••••••••••••••••• 132.3 Eigenvector Assignment for Real Eigenvalues ••••••••••• 152.4 Eigenvector Assignment for Complex Eigenvalues •••••••• 17.2.5 Use of Eigenvector Freedom•••••••••••••••••••••••••••• 242.6 Improvement of Initial Assignment by Gradient
se arch•...•.• II ••••••••••••••••••••••••••••••••••••••• 26
3 SPECTRAL ASSIGrft1ENT USING REDUCEO-QROER MODELS ANDREDUCED-ORDER OBSERVERS •••••••••••••••••••••••••••••••••••• 29
3.1 Motivation for Using Reduced-Order Models andReduced-Order Observers ••••••••••••••••••••••••••••••• 29
3.2 Reduced-Order Model Formulation••••••••••••••••••••••• 303.3 Spectral Assignment Us 1ng Reduced-O,'der Models ........ 323.4 Reduced-Order Cbserver Formulation•••••••••••••••••••• 373.5 Effect of Reduced-Order Observer on Full
System Eigenstructure••••••••••••••••••••••••••••••••• 48
4 DES IGN PROCEDURE ••••••••••••••••••••••••••••••••••••••••••• 56...
4.1 Design Phllosophyfor Full-Order System t-bdels ........ 564.2 Design Procedure for Full-Order System t-bdels ••••••••• 57
I 4.3 Design Philosophy for Reduced-Order System t-bdels ••••• 604.4 Design Procedure for Reduced-Order System Models
and Cbservers••••••••••••••••••••••••••••••••••••••••• 63
Hi

5 DESIGN EXAMPLE............................................. 77
•
,
Chapter
4.54.6
TABLE OF CONTENTS· Concluded
Cost Funct fan •••••••••••••••••••••••••••••••••••••••••Cost Function Gradient ••••••••••••••••••••••••••••••••
Page
6769
t)
-
5.1 Original Lateral Axis Model •••••••••••••••••••••••••••5.2 Reduced-Order Model Design••••••••••••••••••••••••••••5.3 Summary and Concluding Remarks ••••••••••••••••••••••••
REFERENCES ••••••••••••••••••••••••••••••••••••••••••••••••••••••
APPENDICES
7796
100
112
APPENDIX A.APPENDIX B.
SOFTWARE LISTING••••••••••••••••••••••••••••••DESIGN SESSION EXAMPLE ••••••••••••••••••••••••
115124
-II
• ,,.LIST OF FIGURES
Figure
2.1 Linear Time Invariant System Model ••••••••••••••••••••••••
Page
8
f.t)de 9••••••••••••••••••••••••••••••••••••••••••• It ••••• It 66
Reduced-Order Observer.................................... 47
Reduced-Order Design Philosophy........................... 62
Subroutine ROGRAO......................................... 71
82
79
81Yaw Rate - Open Loop Response for ,(0) • 1· •••••••••••••••
Aircraft Axis System.•.••••.••••••••.•••••.•••••••••••.•••
Subroutine ROCeST......................................... 70
Subroutine VACT........................................... 68
Control Law· Implemented with Reduced-Order Observer....... 49
Eigenvalue/Eigenvector Assignment Design Philosophy....... 58
Spectral Assignment Computer Software PackageOrganization.............................................. 59 '
System Model with Constant State Feedback................. 14
Eigenvector Projection into Allowable Subspace............ 25
Original System and Proposed Reduced-Order Observer....... 42
Proposed Reduced-Order Observer without Oifferentiator.... 43
Modified Reduced-Order Observer........................... 46
Modified Spectral Assignment Computer SoftwarePackage Organization...................................... 64
Sideslip Angle· Open Loop Response for ,(0) • 1· •••••••••
2.2
2.3
3.1
3.2,
3.3
3.4
3.5
4.1
4.2
4.3
4.4
4.5~
, 4.6
4.7
4.8
5.1
5.2
5.3
..
v

..
'., ,
LIST OF FIGURES - Continued
Figure
5.4 Roll Rate - Open Loop Response for +(0) • 1· ••••••••••••••
5.5 Bank Angle - Open Loop Response for .(0) • 1· •••••••••••••
5.6 Rudder Deflection - Open Loop Response for +(0) • 1· ••••••
5.7 Aileron Deflection - Open Loop Response for +(0) • 1· •••••
Page
83
84
85
86
5.8 Washout Filter - Open Loop Response for ~(O) • 1·......... 87
5.9 Yaw Rate - First Closed Loop Response for +(0) • 1·....... 89
5.10 Sideslip Angl e - First Closed Loop Response for• (0) • 1- ....••••.............••........ It ••••••••••• It • • • 90
5.11 Roll Rate - First Closed Loop Response for +(0) • 1·...... 91
5.12 Bank Angle - First Closed Loop Response for +(0) • 1·..... 92
5.13 Rudder Deflection - First Closed Loop Response fort(O) • l· •...•..............................•.......... ~.. 93
5.14 Aileron Deflect.ion- .Firs-t Closed Loop Response for+(0) • 1- ..... It It It. It .-.'.'•••..• • '••••••••••• It' ••••••••• It ••• 94
5.15 Washout Filter - First Closed Loop Response for,(0) • 1- •....•........•...........•..•.............. It. It 95
5.16 Yaw Rate - second Closed Loop Response for +(0) • 1·...... 101
5.17 Sideslip Angl e - second Closed Loop Response for-. t (0) • 1·,•..•...•........................ It • • • • • • • • • • • • • • • 102
5.18 Roll Rate - second Closed Loop Response for .(0) • 1·..... 103
5.19 Bank Angle - second Closed Loop Response for +(0) • 1·.... 104
5.20 Rudder Deflection - Second Closed Loop Response for+(0) • 1·................................................. 105
5.21 Aileron Deflection - second Closed Loop Response for+(0) •1·................................................. 106
5.22 Washout Filter - second Closed Loop Response for~(O) • 1- ••.• It ••••••••• It ••••• It •••••••••• It •••••••••••••
5.23 Observer State '1 - Closed Loop Response for +(0) • 1· ••••
vi
107
108 .
.'~
•...

Figure
LIST OF FIGURES - Concluded
Page
5.24 Observer State,'2 • Closed Loop Response for +(0) • 1·.... 109
5.25 Observer State 13 • Closed Loop Response for +(0) • 1·.... 110
vii
--_._.---_._._-_..•._.•._..~------_._._ ........•......
I ..II..I
~
..,@':".:i,\
..A
-B
-C
E
F
F
j?
F'
-F
• LIST OF SYMBOLS
System plant matrix
Matrix Atransformed by M
-Partition of A
- --Closed loop matrix [A + BF]
Input matri x
Input matrix Btransformed by V
ith partition of B
Input matrix Btransformed by M
-ith partition of B
Output matri x
Output matrix transformed by M
ith partion of output matrix
Set of complex scalars
n dimensional complex space
Observer system plant matrix
Full state feedback matrix
Reduced-order model state feedback matrix-1F' transformed by V
[F:O]
F transformed by M
-ith partition of F
Washout filter state
' ..
'1 "i
:{
viii
.... "I!~. C"?~~

i:',>
j.'t
G
GR
LIST OF SYMBOLS - Continued
Observer input matrix
Gradient matrix
I Identity matrix
ln nth order identity
J Cost function
Ka Complex null space matrix
Ke Complex null space matrix
Ky Complex null space matrix
K~ Complex null space matrix
K~i Real null space matrix
L Reduced-order observer feedback matrix
M Transformation matrix = [01 I2]
~ Complex null space matrix
MAi Real null space matrix
NA Complex null space matrix
NAi Real null space matrix
PA Complex null space matrix
PNA Real projection matrix
PKA
Complex projection matrix
p Roll rate (radi ans/second)
R Reduced order observer matrix
R Set of real seal ars
Rn n dimensional real space
SA Complex null space matrix
SAi Real null space matrix for ith eigenvalue
T Matrix [-L:I]
1x
,!.• ";
,~-,
~\2~
.;~

•
·... ,
':
u
u
v
LIST OF SYMBOLS - Continued
Left eigenvector matrix
Input vector
ith left eigenvector
Right eigenvector matrix
Partition of V
Right eigenvector
ith right eigenvector
Element of V
ith eigenvector of reduced-order model
ij ,
"Vij ith component of Vj
vi Eigenvector assigned in reduced-order model
vij ith partition of Vj
Vo Desired partial eigenvector assignment
vOij
ith component of jth VovT Eigenvector of total system
w
ith partition of VT
Null space matrix consisting of all w
Reduced-order observer state vector
1-(
I
r
X
Xi
x
Null space vector
Yaw rate (radians/second)
Designator matrix (real)
ith column of designator matrix
State vector
-.
Element of X
Complex designator vector
State vector at t =0Xo"'-.,...""r:.0-r
"Lt xc2 Complex designator vector
t x~_.-,~~.._...,. _~-_.__._ _.,.•.•_ _ , ,.

:
z
z
a
A
T
( )T
( )-1
( )*
( )1
( )-L
( )Re
( )Im
LIST OF SYMBOLS - Concluded
Complex designator vector
Output vector
State vector transformed by V
ith partition of Z
Reduced-order model state vector after transformation
-ith partition of Z
Complex null space matrix
Sideslip angle (radians)
Aileron deflection (radians)
Rudder deflection (radians)
Complex null space matrix
Proposed reduced-order observer state vector
Diagonal eigenvalue matrix
ith partition of A
Eigenvalue
ith eigenval ue
Bank ang1e (r ad i an s)
Convolution variable
Reduced-order observer input matrix
Transpose of quantity
Inverse of quantity
Complex conjugate of quantity
Orthogonal complement of quantity
Left inverse of quantity
Real component of quantity
Imaginary component of quantity
xi
' ..
..

.,
~~: .•.
CHAPTER 1
INTRODUCTION
The use of reduced-order models [1] and reduced-order observers [2]
in the design of feedback controllers has been studied by several re
searchers. In addition, the develolJTlent of eigenvalue/eigenvector as-.signment techniques has received much attention in recent years. In
this work, a reduced-order model is used with eigenvalue/eigenvector
assignment techniques to design a constant state feedback controller for
the original full-order system. The eigenvalues and eigenvectors con
tained in the reduced-order model are reassigned in the full-order sys
tem while those eigenvalues and associated eigenvectors not included in,
the reduced-order model remain unchanged in the full-order system. The
constant state feedback matrix is implemented using output feedhack with
a reduced-order observer. It is shown that the eigenvalues and eigen
vectors of the closed loop full-order system remain unchanged when the
reduced-order observer is implemented.
1.1 Mot iv ati on
During the past fifteen years significant advances have been made
toward developing viable synthesis techniques for multivariable feedback
control systems. Notable among these techniques is the eigenvalue/
-.,.,""", !
".
i
,"II
1

\
\~... ._.._ ......_ -..- '··r~-~-;
t. 1
•2
:'-.If ..... ' ~"''''':t
I"
:l
,. I
eigenvector 4ssignment procedure. Early studies in this area focused on
an algorithmic formulation of the spectral assignment by Srinathkumar
[3], while later studies included a geometric fonmulation of the same
problem by "bore [4], Kimura [5], and Davison and Wang [6]. Based on
these theories, design procedures have been developed for approximating
desired mode mixing [7], reducing eigensystem sensitivity to variationst
in plant parameters (8], reducing the effects of actuator noise on 5YS-.tem performance (9] and modifying the resultant feedback gain matrix to
specified gain constraints (10]. Recently, these procedures have been
incorporated in a spectral assignment computer aided design package
[11]. Adeficiency in all MOrk concerning eigenvalue/eigenvector as
signment procedures is an absence of application of these techniques to
real world design problems. Aprimary factor contributing to this pr9b
lem Is the lack of understanding of how to use reduced-order lnodels and
reduced-order observers with spectral assignment procedures.
Models representing the behavior of physical systems often consi~t
of a very large number of coupled, linear differential equations. SUch
models are difficult to use when designing control systems due to exces
sive requirenents for computer time and memory, and to the numerical
analysis problems inherently present when deal1ngwith large systems of
equations. It is, therefore, desirable to develop a design procedure
which ut 11 izes reduced-order system models. Simpl1ficat ion of large
order dynlWic systems h.~~s received the attention of many researchers in
recent years. The major difficulty with this work is that only open-' '
loop system behavior is approximated. Of concern when using reduced-

~.
i'
tt'_""I1
3
order models with eigenvalue/eigenvector assignment proc~ures is the
fact that while the reduced-order model may approximate open-loop system
behavior, the model ing error may be so great or of such a nature that
actual closed-loop system performance is not acceptable. Also of con
cern is the closed-loop behavior of those modes of the original system
which are not included in the reduced-order model.
Full state feedback is implemented by the use of a dyn~ic observer
system when there are fe-er outputs than states. Since some states are
usually available for measurement at the output, a reduced-order observ
er is desirable in order to minimize the complexity of the control sys
tem. Of concern is the effect of a reduced-order observer on the system
eigenvalues and eigenvectors.
1.2 Overview
In this section an overview of the thesis is given. Abackground
of spectral assignment theory is discussed in Chapter 2. Asubsequent
design procedure implemented by Marefat in a computer aided design pack~'
age is presented next. This information provides a necessary foundation.
to support the material in the remaining chapters. In Chapter 3. a new
technique is developed that uses a reduced-order model of a known larger
system and spectral assignment procedures to reassign selected eigen
values of the system. This is accomplished without affecting the eigen
values and eigenvectors not included in the reduced-order model. sec
ondly, a technique is developed that uses Luenberger1s [2) reduced-order'
observer and spectral as~ignment procedures to implement a constant full.
I
;

iJf", (,'$•'.
•
. •
4
state feedback design using dynamic output fee~back. The assigned
eigenvalues and eigenvectors of the original system are retained using•
this technique. In Chapter 4, a design philosophy and then a corre
sponding design procedure are developed for the new s~thesis techniques
presented in Chapter 3. Asoftware package is developed to facilitate
the design of dynamic output feedback control systems using thi~ new.philosophy and procedure. The package i~ included as a new mode to a
spectral assignment computer aided design program developed by Marefat
[15]. The use of spectral assignment with reduced-order models and
reduced-order observers in an actual design problem is demonstrated in
Chapter 5. Results are compared to those obtained by an alternate de
sign procedure. Aprogram listing and an example of a computer aided
design session are included as appendices.
'+...
I .
t
...II"•"...~
~ -.i...
~ ~

r-·"-'· ..ti·,..)
i!.rI.
I
CHAPTER 2
SPECTRAL ASSIGNMENT PROCEDURE
In this chapter a background of spectral assignment theory is pre
sented to support the development in Chapter 3. Definitions of eigen
values and eigenvectors are given. Then the effect of eigenvalues and
eigenvectors on the time response of a system is presented. Lastly. a
characterizatton ~f the freedom available in selecting eigenvectors for
a given eigenvalue assignment using constant state feedback is pre
sented.
2.1 System Ei genstructur'e and Ti me Response
The eigenvalues of an nth order real matrix Aare the zeros of the
polynomial det (A I-A]. The eigenvalues. ).itC. form a self-conjugate
set. That is. for each complex eigenvalue ).i there exists a complex
conjugate eigenvalue ).1+1 • ).i*' For each eigenvalue ).p there is anright eigenvector. VjtC. that satisfies the equation.
\I'
I
(2.1)
for i • 1••••• n. If the eigenvalues of A form a distinct set. then
the associated eigenvectors are linearly independent (11]. Equation
5

(2.1) is written for all Ai and vi as
AV • VA. (2.2)
where V· [VI ••• Vn] and A· diag.(AI •••••An). Since the columns of
V are linearly independent, V is invertible. Therefore.
_1A • VAV • (2.3)
Similarly. for each eigenvalue Ai there is a left eigenvector.
Ui£C~ that sattsf~es the equation
(2.4)
Ifor i· 1••••• n. The left eigenvector equation is written for all Ai
and ui as
(2.5)
where U· CUI ••• un]. For distinct eigenvalues. the left eigenvectors
are also linearly independent (12]. Hence. premultfplying equationI .
(2.5) by CUT)- yields
(2.6)
Substituting for A from equation (2.3) into equation (2.6) yields
(2.7)
'IIt,I
7
"-.' .. '.- ...,.. ". ;,;:.......,...'.~. ''''--'1 (:!,)
I,
r··· ~ ~_._, ...'< •
r 'fl:.\
Premultiplying by UT and postmultiplying by Y yields
(2.8)
..Since A is a diagonal matrix of distinct eigenvalues, equation (2.8)
can only be satisfied if UTy is a diagonal matrix. For convenience
the eigenvectors are usually normalized so that UTV· I or
T .1U • Y • (2.9)
The effect of eigenvalues and eigenvectors on system time response
is now presented. Consider the linear time invariant system in Figure
2.1 represented by the system state equations
•x • Ax + Bu (2.10)
and
y • Cx, (2.11)
where A, B, and C are the plant, input, and output matrices respec
t ively and x & Rn• u £ Rm• and y £ RP• The system time response
is determined by solving the differential equation (2.10). Let a change
of coordinates be defined by

--0-i
II
0
XU x J cB + - - --I'
A -
Figure 2.1. Linear Time Invariant System Model
y

..ORIGINAL PAGE ISOF POOR QUALITY
9
I1
;.. x • Vz •
The transformed system is
.1 .1Z • V AVz + V Bu
y • CVZ.
Substituting from equation (2.3) into equation (2.13) yields
• .. 1Z • AZ + V Bu.
The solution of equation (i.15) is given by [13]
(2.12)
(2.13)
(2.14)
(2.15)
tz(t) • eAt Zo + ! eA(t-T) UTBU(T) dT (2.16)
where Zo is the initial value of z(t) at t· O. Substituting from
equation (2.12) yields the time response
,/
(2.17)
'.••III.....IiI~
t
The first term of equation (2.17) is ci'lled the zero 'ftlll1JPut response and
the second term is called the zero state response •
Expanding the zero input response yields

r----' ". ·~"'''.:I;''_f''~'''''''"",,,,_ ...
I
•·•
OniGiN:\L PAGE 19OF poon QUALITY
• • • 0T
Ul Xo
10
•...~~",'-".,...~,.. .t.,·, ""~
o • • • U Tn
). t T• vUe 1 (Ul xo) + •• (2.18)
From equation (2.18) the ith component of the statevector is determined
to be I,I
Expanding equation (2.19) yields
./.
~.,~----
/--/
// xdt) Vll
• + ••• +
(2.19)
(2.20)
. .xn(t) vn1 vnn
The zero state response is expanded next. Let the input vector
u(t) be a vector of unit step functions, uo, for computational ease."
i
-1",}/A

ORIGINAL Pi>,:'::;: isOF POOR QU;;LiYV
11
This yields
t A(t.'!') TX(t) • VleU B uodT
•t
• (veAt ) I e-ATdT (UTB uo).•
Since A is a diagonal matrix, the integral term is written as
(2.21)
•
• •• 0• •
···o. • • •
.t -). T
[e n dT
o .••
• • • 0
·•• (2.22),!I
Premultiplying equation (2.22) by the diagonal matrix eAt yields
Atft -AT d 1 ). te e T. - - (I-e 1 )•
o . • .
o···.
_...!. (l_e).nt)).n
(2.23)

!:1f....".. ,;._....c. ~-:
, ~';;
.'...-j~ '.
.,• r
/
OR!Gt";.~\t. rj;~.'~:~ ~:i
OF PO(jf~ QlJf~Lr('J
., ' .' " ~ ~ , '-.-.,.". ~,,-.\ '/~~-"'"
12 /
• f,ff The vector K is defined to be
K :& uTa Uo •
SUbstituting equations (2.23) and (2.24) into (2.21) gives
(2.24)
o
• • • 0
·•·•1 Ant
- - (I-e )An
K
n -K At• t vi (2) (l-e i )
i=1 >'i(2.25)
I
iI
(-K1) (l_eA1t)
>'1
A t(l-e n )
(2.26)I
> .
--.
A tThe terms e i are called the modes of the system. Equations (2.20)
and (2.26) show that the eigenvalues of the system determine the rates
of decay of the modes while the eigenvectors determine the contribution'
of each mode to the various states. Thus, the time response of a system ,
....tJ.

-" I' ?'~......"'<!.~",~.. , ..
• •••••••--_••." .••• __ •. ••~ ..... _. - ..... . ·,,_,·.·..#··_.•,··v·... ".,,, .•. ""'f' ..., .. ".. ..... :~
.'i~
1J.1
13
can be controlled by proper selection of system eigenvalues and eigen
vectors.
2.2 Characterization of Freedom in Eigenvector Assignment
Given the linear, time invariant controllable system with constant
state feedback in Figure 2.2, the system state equations are written
•x • (A + BF) x + Bv
y = Cx.
(2.27)
(2.28)
\\
Given that constant state feedback is used, Wonham [14] states that an
mxn matrix F can be found to assign an arbitrary self conjugate set·
of eigenvalues if the system is controllable. Moore [4] characterizes
the freedom available to assign eigenvectors for an arbitrary self-con
jugate set of eigenvalues. He gives necessary and sufficient conditions.
to find a unique real matrix F that satisfies the eigenvector equa
tion
i.t
eigenvalue ~.1..
I ~
III :.•
I ••lie1....
For i = 1, ••• t
(A + BF) vi =vi ~i
n when B has full column rank.
an nx(n+m) matrix \ wherei
(2.29)
Associate with each
(2.30)

..
v
....
" ,
0
uB
x f x c+ + -
:-'
.A
F
Figure 2.2. System Model with Constant State Feedback
....-.-...... ",_._-, ..... -.>--_. ,"-.... _ .. -- ~' ... -.
y

r~~"'''''~'';'''''''' ... .', ,.~i't
l
15
and a compatibly partitioned (n+m)xn matrix
(2.31)
whose columns constitute a basis for the null space of S~ .• Then the,necessary and sufficient conditions to find a unique real matrix F
that satisfies equation (2.29) are:
1) Vectors vi tCnare linearly independent,
* *2) vi =vj whenever ~i =~i' and
3) v e span (N~ ).i i
Thus it is possible to assign an arbitrary selfconjugate set of
eigenvalues and a set of eigenvectors from within the span of N~. Thei "
null space NAi is determined by the selection of an eigenvalue ~i.
The su~space, ~. identifies the freedom available to assign eigen-,vector Vi.
2.3 Eigenvector Assignment for Real Eigenvalues
It is first assumed that Ai eR so that vi t Rnfor i =1, ••• n.
Equation (2.29) is rewritten as-'•I•:.•I (~.I-A) v~-(BF) v. = o.
1 1 1(2.32)
.<1

/
•-..,
•
,I •
,/
16
S1 nce K,. is a basis for the null space of SA' then any vector K11 1
that postmultiplies K,.. gives a resulting vector that lies in the null1
space of SA. Therefore,i
(2.33)
Expanding equation (2.33) yields
(2.34),,.
Since Vi £ span (""i)' then Ki detennines .mere in the allowable ..
subspace Vi exists. Hence,i
If
Vi • N Ki •"1
It follows from equations (2.32) and (2.35) that
By defining Wi as
Wi • - M" Kit1
equation (2.36) is rewritten in matrix form for all i as
(2.3~~
(2.36 )
(2.37)

17
or
FY·W.
Since the eigenvectors are linearly independent, then
F • WV_i.
(2.38)
(2.39 )
(2.40)
2.4 Eigenvector Assignment for Complex Eigenvalues
It is next assumed that lice for 1 - 1, 2 and licR for
i -3, ••• , n. Then the first closed loop right eigenvector must satisfy,
the equat ion
(2.41) , j\
I
where the subscript one is suppressed for simplicity. Equating real and'
imaginary parts yields
(2.42)
and

f· ........•..'~·····
I,\..
.. .,_ ..." " ..e.,,,.·_ .......... ·. ~.' .._., ........".
18
(2.43)
: The two equations are written in matrix form as
and
• 0 (2.44)
(2.45)
For the case of complex eigenvalues, the nX(2n+m) matrix SA is defined'
as
(2.46) .
and a compatibly partitioned (2n+m)xn matrix ·KA is defined by
(2.47)

!!
19
(2.48)
From equations (2.44). (2.45) and (2.48) it is apparent that the vectors
in (2.44) and (2.45) are contained in the null space defined by KA•
Therefore
'1/
[YRE
J • SPAN [:~](2.49)
, ,-vIM,
-FV RE
and
~~](2.50).
I
[VIM] \.vRE £ SPAN I
-Fv IM
From equations (2.49) and (2.50) it is apparent that the allowable sub-·." .
space for vRE and vIM is described by
;,. I
and
[:~~] • SPAN ~:~](2.51)
..,.,":.a.
...
~I
:;
20 "
(2.52)
Combining equations (2.51) and (2.52) yields
~~~] < SPAN [;~ (\ SPAN [:~] (2.53)
The following characterization of the freedom available to assign
complex eigenvectors is not developed here but is proved by Marefat
[15]. Matrixes a and j! are defined by
Q ·~;r(2.54)
1
1and \
8 • [:~r(2.55) :
j
I~":
Ka and Kj! are defined to be matrices whose columns constitute bases
for the null spaces of a and 8. respectively. Matrix y is defined
by
•I•II
•
I
(2.56)
."+

r--'·-:···i.,{. 21
•·,. and Ky is defined to be a matrix whose columns constitute a basis for
the null space of Y. :A basis for [SPAN(a)f\SPAN(S)] is [(SPAN(a))! +
! (SPAN(S»)!]J. where:·'+" denotes set direct sllll1lation and ".1"
denotes orthogonal complementation. Also. a basis for yJ. is a basis
for yT. Hence
t SPAN (Ky). (2.57)
Aspecific vector within the null space of y is defined by postmulti
plying Ky by a vector xT. Thus
(2.58)
..••••I
Using equatfons (2.51) and (2.52). xci and xc2 are defined by
(2.59)
and
(2.60)
The. left inverses 0 f t:~] and [:~] ex1St since the col unos of KA a..e
linearly independent. Therefore
III
I.1!\t.~
•!'~

/
. -._.•.., ... ~-,..... I. _ \!tT~'
F.~,j
;-,;'
i! 22
xc1 • ~:~ -L [YREJ(2.61)
vIMand
xc2 • [Pl] -L [YREJ (2.62).N). vIM
From equations (2.48) and (2.49) it is apparent that the vectors [-Fv RE ]
and [-Fv IM] lie in the space defined by the columns of M).. Hence
(2.63)
and
(2.64 )
r
.•/ .
/ fill~
II'
III
1~
_.~
- I
' ..Since ).1 and ).2 £ C and ).1 £ R for i· 3••••• n. then
'*).2 ·).1 because the eigenvalues form a self conjugate set. Further-
more. the second condition of spectral assignment requires that v2 •
'*vI • Thus the specification of one complex eigenvalue and eigenvector
contains all the essential information of the complex conjugate pair.
'*It is also important to note that if v2 • v2 and the pair v1' v2 are
linearly independent, then vRE and vIM are also linearly inde
pendent. In order to calculate the feedback matrix F, the following .

definitions are given:
~ \!j
'J\ '
,~1
23)
Jt
WI • f\xcl' (2.65)
",
W2 • -MAxc2' . (2.66)
VI • vRE' (2.67)
and
, v2 • vIM' (2.68)
Recalling that for the case of real eigenvalues
IWi • -M,.i xi (2.69) . rand I
vi • vi' (2.70)I•
equation (2.38) is rewritten so that I
Substituting equations (2.65) through (2.70) into (2.71) yields
F[Vl' ••• f Vn] • [wl' ... f Wn]
or
FV • W.
(2.72)
(2.73)'· .

24
As in the case for real eigenvalues,
I
t
F • WV_l. (2.74)
This development is easily extended to more than one pair of complex
conjugatp. eigenvalues.
2.5 Use of Eigenvector Freedom
It is shown in the previous three sections that eigenvectors for
the selected eigenvalues must reside in an allowable subspace that is
determined by the plant matrix A, the input matrix B, and the se
lected eigenvalues Ai' Normally the eigenvector assignm~nt that is
most desirable for a given set of eigenvalues is not achievable because
it does not lie within the allowable eigenvector space. In this case it
is desirable to select the allowable eigenvector that is closest to the
desired eigenvector. This is accomplished by projecting the desired
vector into the allowable space so that the error between the desired
and the assigned vector is minimized in a least squares sense as illus
trated in Figure 2.3.
The desired vector is projected onto the allowable space by the
projection operator
,I
I,!I
. iiI
(2.75)
for real eigenvalues and
,

'"r"'f- 'MH i.li~· \. .
Desired Vector
*
Figure 2.3. Eigenvector Projection into Allowable Subspace
Allowable VectorSpace
NU1

, \.
•
..
" ... l
26
(2.76)
for complex, eigenvalues £15]. Indicating the desired vector by the
subscript "0" and the assigned vector by the subscript "N1, the
projection is accomplish~d by the equations.
(2.77)
and
(2.78)
!I
I
/I.
(
....II•r....•
for the real and complex assignments, respectively.
2.6 Improvement of Initial Assignment by Gradient Search
The selection of eigenvalues and eigenvectors for a system is nor
mally motivated by the desire to shape the time response as discussed in
Section 2.1. However, once the desired time response is approximated,'
there are often other aspects of the assignment that are unacceptable.
An example is an assignment which requires extremely high feedback gains
which are expensive to implement and very sensitive to noise. Another
example is extreme eigensystem sensitivity to small plant parameter
variations or modeling errors. The freedom available to select the
eigenvectors often provides a means to drastically improve these seconJ
ary design objectives while only slightly modifying the initial eigen~ . ,
,

/
;I
.,
i~
(
27
vector assignment and thus the time response. This improvement is ac-•
compl ished by modifying the eigenvectors within an area local to the
original assignment. The vectors are modified in such a manner as to
reduce the undesirable aspect of the assignment most rapidly.
Acost function J is defined so that a reduction in the value of
J corresponds to reduction of the undesirable aspect of an initial
eigenvector assignment. A gradient matrix is computed in terms of J
to determine how the eigenvector assignment is most efficiently changed.
Recalling that the eigenvectors are determined by the equation
vi = N). Xii
for the case of real eigenvalues and
for the case of complex eigenvalues, it is apparent that small
tions in Xi will cause correspondingly small variations in the eigen
vector assignment. Amatrix X is defined as
(2.81)
...-•...Since this matrix designates which eigenvectors are assigned, it is
called the designator matrix. Agradient matrix [GR] with elements
[GR]ij is defined to be

, .
28
aJ-[GR]ij
aXij (2.82)=-II~II
•.aXij
The designator matrix X 1S then varied according to the rule
/
(2.83)
where d denotes the step size of Xij during each iteration. The
gradient search is continued until a satisfactory compromise between the
reduction in the value of the cost function and the modification of the.
time response is achieved.
.1-I .,
,

i'('j'
CHAPTER 3
SPECTRAL ASSIGNMENT USING REDUCED-ORDERMODELS AND REDUCED-ORDER OBSERVERS
In this chapter, the use of reduced-order models and reduced-order
observers in the design of feedback controllers 1S investigated. A
reduced-order model of a known system is formulated. It is then used to
design a constant full state feedback matrix for the original full-order
system. It is shown that the eigenvalues and eigenvectors reassigned in
the reduced-order model are reassigned in the full-order system while
those not incl uded in the reduced-order model remain unch·anged. The
constant state feedback matrix is then implemented by output feedback
using a Luenberger [2] reduced-order observer. It is shown that the
eigenvalue and eigenvector assignments in the full-order system remain
unchanged when a reduced-order observer is used.
3.1 Motivation for Using Reduced-Order Modelsand Reduced-Order Observers
Models representing the behavior of physical systems often consist
of a very large number of coupled linear differential equations. Such
models are difficult to use when designing control systems due to exces-
sive requirements for computer time and memory. and to the numerical
analysis problems inherently present when dealing with large systems of.••..
29!"
i,.-"'--" -".-. "
I. I1

It
I + .,I H
/ ,'~l
I ,{
II/ •III .. ."I
!
. ,
... ",,' "., ,,-,.__.-,_.,~ - -----
30
equations. It is. therefore. desirable to develop a design procedure
Which utilizes reducedworder system models.
The spectral assignment s,ynthesis methods described in Chapter 2
use full state feedback. However. full state feedback is not feasible
for most systems because there are often feNer outputs than system
states. Full state feedback is implemented by the use of a dynamic ob
server for these systems. The use of a full system observer is unneces
sary since some states usually are ~ailable for measurement and there
fore need not be estimated. A reduced-order observer is therefore de
sirable in, order to minimize the complexity of the control system.
. This chapter develops a reduced-order model and reduced-order ob
server. Control system design for the full-order system is accomplished
usinq the reduced-order observer. Reduced-order models and obServers
have been used for several years. However. it is shown here that the
eigenvalues and eigenvectors assigned using the redur.ed-order model are
retained in the closed loop full-order system while the eigenvalues and
eigenvectors not included in the reduced-order model remain unchanged in
the closed loop full-order system.
3.2 Reduced-Order Model Formulation
......... , A reduced-order model that is used in the design of a constant
state feedback controller for the full-order system model is formulated
in this section. The reduced-order model contains the eigenvalues that
are to be reassigned in the full-order model. Let the original 'system
model be described by the state equations
31
~"'"--~~-''''''''''' '-<.''''~''~~'. 't\i;.j
and
x·Ax+Bu
y • ex
(3.1)
(3.2)
where x eRn. UtR"'. and ye,RP• It is assuned that the eigenvalues
of A are d1stinct and are denoted by (Al' ••••An) • The correspond ing
modal matrix for A is denoted by V· (v1' •••• Vn] where Vi de
notes the eigenvector corresponding to Ai. The system model is trans
fonned by defining a new state variable
-1Z • V x.
Equation (3.1) is transformed to give
. ...z • Az + Bu
(3.3)
(3.4)!
. ~
-1 ... -1where A • V AV· diag (A 1 ••••• An)' and B· V B. The system is
now partitioned to separate the eigenvalues to be reassigned tn the
reduced-order model from those that will remain unchanged in the full
order system model. Thus.

III'
"f
(I
:{t
,I
~
y.. ·..-:-·~~·.·v·>·~·· '. '.
32
where Z1cRk and ~cRn-k. The eigenvalues included in the reduced- .
order model must be contained in Al and those which are not included
must be cont&ined in A2 • The reduced-order model is thus described by
the state equation
• ...%1 • A1 %1 + B1 u. (3.6)
/
The reduced-order model is then used in conjunction with the spectral
assignment procedure to assign eigenvalues and partially assign eigen
vectors in the full-order system model. However. the relationship
between the eigenvalue and eigenvector assignments in the reduced-order
and full-order models must be investigated first.
3.3 Spectral AssigOlent Using Reduced-Order Models
The reduced-order model is used to design a constant state feedback
matrix for the full-order system. The relationship between the eigen
values and eigenvectors of the closed-loop reduced-order model and the
closed loop full-order system must be understood in order to accomplish
this. The relationship between reduced-order and full-order system
eigenvalues is determined first. let F denote a constant state feed
back matrix computed for the reduced-order model. The control law is
then written as
'"
.. ..II
•..•,.
..•,
u • F Z1 •
The reduced-order model closed loop equation is therefore
(3.7),

!:"'T\
~l'!
If
• I •
/ 33
.,/
! . ... (3.8)
F is now implemented about the full-order system by assuming full state
availability in the full order model and transforming F back to the
original coordinate system. Equation (3.7) is rewritten as.
- .,
,j,iJ...../' -'-...
,....
"" ~
u • [F:O] Zl • F'z.z2
Substituting for z from equation (3.3) yields
-IU • F'V x· tx.
Hence, the closed-loop full order system is written as
. -x • Ax + B Fx
• (A + Bf]x.
The eigenvalues of the full order system are the eigenvalue~ of
[A + BF]. This matrix is rewritten as
-1 ... -1[A + Bt] • [YAY + VBF'V ]
• V[A + 8F'] v- l .
(3.9)
(3.10)
(3~1i)
(3.12)
"'i
,f
"..

".
34
Since [A+BF] and [A + BF'] are related by a similarity transfonm
ation, they have the same eigenvalues. Matrix [A + 8F'] is expanded
as
/I
,I
,
(3.13)
The eigenvalues of this matrix are obviously the eigenvalues of
[Al + 81 F] and [Az]. Thus it is possible to reassign the k ei~en
values included in the reduced-order model without modifying the (n-k)
original system eigenvalues which were not included in the reduced-order
model.
The relationship between eigenvectors of the reduced-order and full
order system models is determined next. The eigenvector equation for
[A +SF'] is written as
• 0 (3.14)
which yields the two equations
••• andIII....";;
"""- t...
(3.1~L
(3.16)

'..-"
•
35
If Ai is an eigenvalue of [A l + Bl F), but not an eigenvalue of
[A2 ], then from equation (3.15) it follows that V1i is an eigenvector
of [Al + BlF). Since Ai is not an eigenvalue of [A2]' [Ai I-A2] is
nonsingular. Thus, from equation (3.16)
.'
VZi • [Ai I-A2rlBivli'
Therefore, Vi is written as
(3.17)
(3.18)
Equation (3.18) illustrates that the first k elements o~ Vi can be
assigned using the reduced-order model while the remaining (k-p) ele
ments are linear combinations of' v1i'
On the other hand, if Ai is an eigenvalue of A2 and not an
eigenvalue of [A l + BlF), the matrix [AiI-AI-B1F] is nonsingular •.
Therefore, equation (3.15) is statisf1ed only if
From equation (3.16) it follows that v2i is an eigenvector of A2 for
eigenvalue ).1' Since A2 is a diagonal matrix, v2i is written as
..'.-.. /....---.~... V2i • [0, ••• , 0, ki , 0, ••• , O)T
.(3.19)
, .(3.20)

.//
.I /I /
•
ty., ""
~;', ..
..
36
,.,where ki is a nonzero constant. Therefore vi is written as
(3.21)
.-Let vi be the eigenvector of (A+ BF] corresponding to eigenvalue
A1" The eigenvectors vi and vi are related by the transfonnat ion
(3.22)
Expanding equation (3.22) for eigenvalues of[A1 + B1F] yields
/i
' ..("3.23)
Often when the reduced·order model contains only the dominant modes-1", A
of the system, VII· VII + V12 [A i I.A2] B2F. Then the top k compo·
nents of the first k eigenvectors are assigned by choosing Vii as
/;
;
/
/I
-.,,;4'"
,...... ,..
(3.24)

!i
"
{
i
~ ._-_.... ~_._-,,_.- ... ,
. [.~:c'
/"
." ;,.::;.""...;~,.. '-''''''''-''Y'--''.''-.t!t,
37
, .. :tWhen the above approximation does not apply, an initial assignment of,91i is made using equation (3.24), F is calculated, and the error
between the desired top k components of the first k eigenvectors and
the actual assignment is calculated. Agr4dient search procedure is
then used to reduce this error.
For ~i which are eigenvalues of A2 , equation (3.22) expands to
Ther'efore, the last (n-k) eigenvectors in the closed loop full order
systen are the original open-loop eigenvectors. Thus eigenvectors cor
responding to the eigenvalues retained in the full order system mo~e.l
remain the same in the final closed loop system.
/
;'/
/
.....
- V.... [V12]"vi· vi • V v2i •. 22
Substituting for v21 from equation (3.20) yields
Vi • k [Vu].i V22
(3.25)
(3.26)
.,.",.....-'-.,..,....
'."-. ~
3.4 Reduced-Order Observer Formulation
In order to implement the feedback matrix F calculated in equa
tion (3.10), full state availability is required. However, if the
number of outputs p is less than the number of states nf then (n-p)
states must be estimated. This section parallels luenberger's [2] de
velopment of a reduced-order observer system to allow the implementa~ .
; ,I
~j

III
, ,
"/
.I
/
\ I
// !.
I i ./
38
tion of a full state feedback matrix in such a system. The following
section shows that not only are the eigenvalues of the observer system•
',' retained in the closed loop system, but that the original eigenvector
assignment is not affected by use of the observer.
The open loop full-order system model described by equations (3.1)
and (3.2) is
.., ........• ,~'~
1
" .
and
•x • Ax + Bu
y • ex.
(3.26)
(3.27)
If the feedback matrix F is implemented about the systeM model, then
-u • Fx. (3.28)
It is assumed without any loss in generality that the first p columns
of C are linearly independent. A transformation matrix M is defined
to be
(3.29)
•Ir'"..~'
i•
/;I
where In_p is the (n_p)th order ide~tity matrix. Anew state variable
is defined by

Equations (3.26). (3.27). and (3.2~) are transformed and written as
I.
tf•,
1/I,/, ;'
z• Mx.
/
,--- "iI ;
i
,···_'· ..·A'._'.:·· .• ·.·, •: \
39
(3.30)
.f i .. Ai + 'Bu. (3.31 ),
, t1fI
/ ! Y • c i. (3.32)!
;
/I
I andI .':/"
IU • F z (3.33)I
j i
/ I/ where ••• 0 • ,'I
I
/I .1I
'J{I .. MAM (3.34)I •i
/ !/ 'I. i
. I -! 8 • M8. (3.35)
!.1t .. eM .. [Ip OJ. (3.36)
and
,/
... .-_.----;

I
\.!"
, . ,.....:
"", ..." ,_. r ../
40
. ''4.~
.//'
./
':
AI --1F • FM •
Equations (3.31) and (3.32) are expanded as
(3.37)
u(3.38)
Therefore the p components of the output vector are the first p
states of the transformed system denoted by Zl. The reduced-order...
observer must then estimate the remaining (n-p) states denoted by Z2 •.
Equation (3.38) is expanded to be
~
!
/
y • rel (3.39)
I
•,.,. ... ... ... ... ...Zl • All Zl + A12 Z2 + 81 U
-.., and•,.,. ... ... ... ...Z2 = A21 Zl + A22 Z2 + 82 u.
(3.40)
(3.41)
,.
-•••j.,...•t•
...Since zl is available as the output vector y, it can be different-
•iated to generate Zl. Hence, equation (3.40) is solved for Al2 Z2

•
.:: '/'" .'
41
which is used as an input to a reduced-order observer to approximate
z2' The proposed observer is shown in Figure 3.1. It is desired that
..,o • Z2 (3.42)
in order to implement the feedback matrix F. The observer state equa
tion is written as
•e• Eo + LZl - LAll Il + [n-LBl]u. (3.43)
The need to differentiate Zl is avoided by redrawing the observer
as shown in Figure 3.2. If w is defined by
then•. .., .
w = Lz - e = O.
(3.44)
(3.45) .
III
Using equation (3.42) to substitute for a in equation (3.45) yields
• •• N ,-v
W+ L Zl - z2 =O• (3.46)
..----
-:
Calculating each term of the above equation results in the three equa-
,
..~

•
....... • -" "Z I to ... _ • ;. • ....: '
.'
!'.
--,I
III
~ ~ Original~ 'system
IIIt
~ObserverI
t,tI
I--
y-- +z J z - .I B CI -I
[X]-JI
- - - -I ----- --- - _.-,...- --- d- -
~I dtI -B1 -I
A12 Z2 AuI
I LI
~I
J eI n
I
I E ~I1 -
u'
Figure 3.1. Or~ginal System and Proposed Reduced-Order Observer

/
--- .,
. .. '. .. . .•.
//
/" .
". . .
y= ZII....~----.----
u --81 --Au
J e.LZL
e
Et-C--~
Figure 3.2. Proposed Reduced-Order Observer without Oifferentiator
"--......-_ ... ",
....--,.

..
.. !
-...
.. ". .
. If
-!-
tions•
and
ORIQINAt; Ff r~:; iiJ •0' POOR QUAi.,r~
• ,.. #IW AI ,.,
W• E [w + LZ1] + [O-LB1]U - LAll%l.
•,.. #tt#'" __,." #IIttI
LZl • LAll Zl + LAl2 Z2 + LBl u.
•AI .., ",. AI #till I'W
-z • -~l %1 - AZ2 %z - B2U•
44
(3.47)
(3.48)
(3.49)
.. -"·",,,:",'·-S··
Substituting equations (3.47). (3.48). and (3.49) into (3.46) gives
(3.50)
. I,.
Using equations (3.42) and (3.44) to substitute for w yields
Since the input and state vectors are not generally zero. the multiply
ing matrices must all be equal to zero for the equation to be true.
Solving for the last two terms gives
E • Au - LAl2
(3.51)
(3.52)

,/
..and
· ,,~ ,
.'
,,
/
45
(3.53)
Matrix ~1 is generally nonzero also. This indicates that the pro
posed reduced-order observer is n~t adequate. Thus the observer is...... .
modified by adding AzI Zl to w' and grouping terms as shown in Figure
3.3. To remove the summer located after the integr3tor, it is noted
that
(3.54)
Using equation (3.54), the reduced-order observer is drawn as Figure
3.4. The eigenialues and eigenvectors of E· [A22 - LAIZ ] are deter-·
mined by proper selection of L since the eigenvalues of
rAzz- LA12 ] are also the eigenvalues of [Az2T- A12
TLT]. Chapter 2
describes a procedure for selecting a proper LT to achieve a desired~
eigenvalue and eigenvector assignment. Aguideline for selecting
reduced-order observer eigenvalue locations is discussed in Chapter 4.
The reduced-order observer is now used to implement the feedback
matrix F. Expanding the control law given bi equation (3.33) gives
(3.55)

\
\
./ .'
,,.
u
r
- - LA21 L All..
•-~
w f w +"" e-LSIn
- -A22 -LA12
Figure 3.3. Modified Reduced-Order Observer
g;.
.""

..,,..
. ,
•u_~ B2 - LBlt---~~I-----'"-W.:--.t J t--...:LZ-W---r-_...
Figure 3.4. Reduced-Order Observer
....L"":~ _

./- It':... '.'~i~ '....,. ... , .. 'I.
~. ,
I
•
48
....Using equations (3.42) and (3.44). a substitution is made for Z2 re-
sulting in
(3.56)
_-------r
The control law in equation (3.56) is im!,~emented in Figure 3.5.
3.5 Effect of Reduced-Order Observer on Full System Eigenstructure
The effect of a reduced-order observer on the eigenvalue and eigen
vector assignment in the closed loop full-order system is developed in
this section. Luenberger (2] has proven that the eigenvalues of the
original system assignment and the observer assignment remain unchanged
in the closed loop full-order system. It is shown here that the eigen
vector assignment also remains unchanged. The following definitions for
matrices G. R. and T are given to reduce the algebraic complexity of
this development. Let
/
".~-, . -
i/
/
/ and/
It
•"•
/.. /
/
-..
T· [-L:I].
(3.57)
(3.58)
(3.59)
,

PI ,
\\
.." .
.9
.~
." '-:. '--;.i;-~
•- -- -G:\Z J ~Z_..-..t- C11
--r--.......- B~ - '-----' - - y
W f!r
•Wt--'"'-=---{+ _
"-- A2lLA12-t------''---_. --- --
I-----------,..---~11 + 11 L ....-I--------~
Figure 3.5. Control law Implemented with Reduced-Order Observer\
,.a=o.\0
-.,

/
Ii
i
- .,
II I /
. .50
/
. /
The eigenvalues of the system,are determined first. Using equa
tions (3.57), (3.58), and (3.59), the total system state equation is
written as
•
.~.
~. [~] (
A+ BR~TaRe + .G'C
,
(3.60)
Equation (3.60) is now transformed to an upper triangular form so that
the system eigenvalues are apparent. The transformation matrix P is
defined by
//
-_...------
p{~ ;land a new state variable is defined to be
v • w- Ti
(3.6!) .
(3.62) .
I
I
IJ
so that
[- "" ""A + BRC
fMc + GC- J[ ] [""]BF2 T 0 z
E + TB~2 T I v
(3.63)
.......
~--'
Equation (3.63) is simplified to give

/,
// 1/ II I , i/ I
I.--~ ... " ,.-.",~ ~.'''!' 4Jt4i!>*r"~'''' .........J"
Cl-, ... " .............~::;::.; ,. , .. "
•• ~
.---r---- 1;
51
[;] fA,.,
(RC,.,
T) 72
] [:]• + B + F(3.64)•"'--,---. l..TA + GC+ ET
Ij
II
The submatrix [ ..TA + GC + ET] is equal to zero. This is shown by eval ..
uating each term within the matrix. The individual terms are given by
I
/ '/. /---
I "" !
,.
(3.65)
(3.66)and
Hence,
..fA + GC + ET • o.
(3.67)
(3.68)
i~
'j!
The expression (RC + F2 T) is equivalent to
panding (Re + F2T) asF. This is shown by ex~
/I
I
.. :-- .:~r!J
... I.. I
III
jf,
!
N ."'" ,..
• [Fl : Fz] • F. (3.69)

,
/'..~•
,.
. ,
If
52
Therefore the substitution of equations (3.68) and (3.69) into (3.63)
gives•
,/
'~.,--- .~--
.,~ (3.70 )
Thus the eigenvalues of the system are those assigned to rA + SF] and
[E]. In other words, the use of the reduced-order observer has no
effect on the original system eigenvalue assignment.
The eigenvectors of the system are determined next. Transforming
the state equation using equation (3.30) results in
(3.71)
/j/
/I I
/ .).
/ e.
-~-- .. --/---_ ..-.. "
~-..-~~ r I, •
~... i ,0
I
Let the closed loop system matrix 1n equation (3.70) be denoted by AT"
An eigenvector of AT corresponding to A is denoted by vr' Eigen
vector vT is compatibly partitioned so that
·i
I.'
~'~.~"""""""-v.-r;-.••~....;.., ..~.......~.... ~!:I," f~ .':':.~ '.' " « ..... ~. • '" •
t',"J,
:",.
/"~'-r""
. !.
._-_ ....- ..-
53
(3.72)
/ The eigenvector equation for Ar is
tl : AT. SF2]
['T~] r:J (3.73)>.I-E vr2
Equation (3.73) is expaned giving
./,//,/
. [>.I-Ar ] vn - [BF2 ] vr2 =0 (3.74)and
[A I - E] vr2 II o. '(3.75)
It is assumed that the eigenvalues for [Ar] and [E] are distinct
since their locations are arbitrarily assigned as discussed 1n Chapter
/2.
-1Suppose A is an eigenvalue of [Ar] but not [E]. Then [AI-E]-1
exists. Premultiply1ng equation (3.75) by [AI-E] yields the result
Hence equation (3.74) 1s simplified to
(3.76)
...........--'~
I.I
•/ ........:- I/~
I /'
i
\,i
";
54
iI
.I
(3.77)
Therefore vT1 1s an eigenvector of [AT]'
Now suppose A is an eigenvalue of (E] but not [AT]' Then_1
[>.I-Ar] exists. Equaiion (3.75) implies that vrz must be an eigen--1
vector of [E]. Premultiplying equation (3.74) by [AI-AT] and rear-
ranging terms gives
(3.78)
..,.
Henc~ for >. that are eigenvalues of (AT]'
(3.79)
where vT1 is an eigenvector of [AT]' For A that are eigenvalues of
(E),
...
[(A I-AT) B F2]vT =,
I
(3.80)
•.
where vT2 is an eigenvector of [E]. Thus it is shown that a reduced
order model can be used to design a constant state feedback controller
for a full-order system. The eigenvalues and eigenvectors assigned , .
using the reduced-order model are retained in the full system while the

.I•
I
I!
, I
, I
...<&
55
eigenvalues and eigenvectors not included in the reduced-order model
remain unchanged in the full-order system. It is also shown that a
reduced-order observer can be used to implement a full state feedback
design without affecting the eigenval ues and eigenvectors of that
design.
i:1
, ,
CHAPTER 4
DESIGN PROCEDURE
. The methods described in Chapters 2 and 3 are the basis for devel~
oping a design philosophy. and then a corresponding design procedure. •. ,
..
,.
.-.II•,..
...... ("......l".. ~
for constant state feedback controller design. The design procedure .
presented in this chapter is most useful when a designer is able to
characterize the desired system in terms of the closed loop eigenvalues
and eigenvectors as well as the time response. This chapter reviews an
existing spectral assig~ment design philosophy. Acorre~ponding design
procedure and computer aided design package [11] are discussed next.
Then an extension of the design philosophy is presented followed by a
corresponding design procedure. This design procedure is included as a
supplement to the computer aided design package. Lastly. the signifl
cant portions of the additional computer aided design software at'e d'e-'
scribed in detail. The modified design procedure uses reduced-order
models and reduced-order observers with spectral assignment methods to
reassign selected eigenvalues and eigenvectors in the full-order system
model.
4.1 Design Philosophy f~~ Full-Order System Models
The constant state feedback design philosophy for full-order system
56
. II

..
57
models is illustrated in Figure 4.1. The objectives faced by a system
designer are often many and sometimes conflicting in nature. However,
the location of eigenvalues and eigenvectors, and the system time re
sponse are generally the prime consideration. After these objectives
are satisfactorily achieved, secondary design objectives are considered.
These secondary objectives include feedback gatn reduction, minimization
of closed-loop system sensitivity to modeling errors or parameter varia
tions, and noise suppression. The spectral assignment design procedure
achieves a satisfactory control design by selecting an appropriate set
of eigenval ues and approximating a desired set of corresponding eigen
vectors. The eigenvalues determine the rates of decay of the various
system modes while the eigenvectors determine the relative contribution
of each mode to the different system states and outputs. After a sa~is~
factory t imt:. response is achi eved with an initial eigenval ue and eigen
vector assignment, the secondary design objectives are considered. The
freedom available to select the eigenvectors often provides a means to
drastically improve these SEcondary design objectives whi le only sl ight
ly modifying the initial eigenvector assignment and thus the time re
sponse. This improvement is accomplished by modifying the eigenvectors
within an area local to the original assignment. The direction and
magnitude of the eigenvector modification is determined by a gradient
search procedure as discussed in Section 2.6.
4.2 Design Procedure for Full-Order System Models
A computer aided design package written by Marefat [11] currentl,y' ..
exists and is illustrated in Figure 4.2. The software package consists

~". _ 'd OZ, ¥"1:t%:a+p ;Hike 4d.=t ;_ ,~,l,\ "."
.:. 4,_._-:-. "
!I
If
,:.,., ; /'
que" 04341
,,j
ceca w,., ;t,6
\
\.
a 7'. • '4 $ $
; -
; [; ;; »
.-,.• .; $ , '2 a.a,t.i
"I' ,. ._: ..
IICENVALUIASSIGNMENT
INITIAL EIGENVECTORASSIGNMENT
EICENVECTOR COHPONEHT IENSnIYln GAUl TIIII I£SI'ONSIHODIFICATlOlf IEDUCTION HDDtrlCAT10ll IIHUUTIOlI
Figure 4.1. Eigenvalue/Eigenvector Assignment Design Philosophy
•
•
v
!1
iI

>;.
\
,-
'/
/
59
\
\\
\
/ -"
----'I
/I
" ,...
START
MOOESELECTION:
0,
INSTRUCTIONS II I ..
1 I DATA EHTRr ~-,
2 I EIGtHVALU£ ASSIGftIlEHT l ~.... I ....
J,
EIG£HVECTOR ASSIGlKHT l ---1 r -.4 I TIME SIMULATION I -
"1 I ..::i -, COMPONENT MODIfICATION ,
I Of ElG~VECTORS I,
EIG~VECTOR MODIFICATION I -6 ~ FOR GAIN REDUCTION I
7 I EIGENVECTOR MODIFICATION I1 FOR SENSITIVIT~ REDUCTION r-
8,
FILE AAHIPlA.ATlOft J---.-
~HEO?
rESv
£leD
Figure 4.2. Spectral Assignment Computer Software Package Organization
,

,r!l'
' .....----....... """'.:
...~ ....
_._~._-
60
of several special ~urpose subroutines that are accessed by the main
control program. The subroutines may be entered in any order to imple
ment specific design objectives according to the design philosophy in
Figure 4.1. The system description (i.e., A, 8, C) is entered in Mode
1. An arbitrary set of eigenvalues is assigned in ~de 2, which then
fonmulates the allowable subspaces for the eigenvectors. The desired
eigenvectors are approximated in Mode 3 by projecting them into the
allowable eigenvector subspaces. Mode 4 allows the system designer to
observe the time response for various initial conditions and system
inputs. The initial design is then improved by alternating between.
Modes 4, 5, 6, al1d 7 until a compromise between primary and secondary
design objectives is achi~ved. Modes 5, 6, and 7 modify eigenvector
components, reduce feedback gain, and reduce system eigen-sensitivity,·
respectively, using gradient search procedures.
4.3 Design Philosophy for Reduced-Order System Models and Observers
The design procedure discussed in the preceding section is useful
for systems where full state feedback is feasible. Another feature of
the procedure is that it assigns all eigenvalue and eigenvector loca
tions. A system designer is often satisfied with several open loop
eigenvalue and eigenvector locations in a large sy~tem. The reassign
ment of the remaining eigenvalues and eigenvectors is better accomplish
ed using areduced-~rder model that contains only those eigenvalues,.due
to reduced requirements for computer time and memory. Also, large sys~
tems typically have fewer independent outputs than states. Afull state

,,"'
\
....
. ~.
/
•JI
•
61
feedback.design is implemented in this case with an observer system.
The observer estimates the system states in order to implement the feed
back control law. Since some of the states can be obtained from the
outputs, only the remaining states need to be estimated with an observ
er. Areduced-order observer is desirable in this case. It is designed
using less computer resources than a full-order observer. Also, less
hardware is required for implementation of a reduced-order observer.
Adesign philosophy that uses reduced-order mo~~ls and reduced
order observers is illustrated in Figure 4.3. In order to design a
control system using spectral assignment with reduced-order models and
reduced-order observers., a designer must have knowl edge of a desi red set
of systen eigenvalues and eigenvectors. The original open loop eigen
values and eigenvectors are compared with the desired eigenvalues '.a~d
eigenvectors. Adecision is made as to which of the eigenvalues and
associated eiqenvectors are satisfactory and which need to be reassign
ed. The spectral assignment design procedure is used to assign the': '
des~red eigenvalues and approximate the desired partial eigenvector ~s
signment using the reduced-order model. Error beheen the initial
eigenvector assignment and the desired eigenvector assignment is then
reduced by a gradient search. Next, the resultant reduced-order feed
back matrix is transformed to the full-order system•
.If all of the states are simultaneously available for measurement,
then the full state feedback matrix is implemented. However, if some
states are not available, then a reduced-order observer is designed.
The eigenvalues of the observer are assigned to be slightly more

....../
t!,.
f;
. ,FORMULATE REDUCED
ORDER MODEL
ASSIGN EIGENVALUES
ASSIGN EIGENVECTORS
IMPROVE EIGENVECTORSELECTION BYGRADIENT SEARCH
FORMULATEREDUCED-ORDEROBSERVER
IASSIGN EIGENVALUE~
IASSIGN EIGENVECTORS
VERIFY RESULTSBY TIME RESPONSE
NO
62
--,,,.-~Figure 4.3. Reduced-Order Design Philosophy
•- ---"
•
••"
L
..- ,/
-'~-------......
63
negative than the dominant eigenvalues of the closed loop systen design•
This is done to ensure that the observer can respond quickly enough to
follow the states being estimated. Theoretically if the observer eigen
values are assigned to be very large negative numbers then the observer
will provide a better estimat~ of the states. However. this is not done
in practice because the observer then acts like a differentiator and is
very susceptible to noise.
This philosophy and the synthesis methods described in Chapter 3
are used to develop an extended design procedure that exactly reassigns
an arbitrary subset of the original system eigenvalues which are includ
ed in a reduced-order model. A partial eigenvector assignment is then
approximated for these eigenvalues. This control is implemented with a
reduced-order observer if there are fewer system outputs than states., A
contribution of this thesis is that the reduced-order design and imple
mentation are accomplished with the knowledge that the eigenvalues and
eigenvectors not included in the reduced-order model remain unchang- ,
ed.
4.4 Design Procedure for Reduced-Order System r-tldels and (bservers
The computer aided design package written by Marefat has been modi
fied as illustrated in Figure 4.4. An additional mode (r-tlde 9) has been
added to incorporate the use of reduced-order models and reduced-order
observers in system design. The full-order system description is enter
ed in Mode 1. If a reduced-order model is to be used in the control .
system design, r-tlde 9 is entered. Otherwi se the design procedure con-
/
I
I

/
• ~•
•
fI
64"
-...
-_..----._.
I'lAI% ) ,'"
II)DIntlCrI011
i L0 ~ DlSTlUcrtOllS I
1r
DAfA D'1'I1'I
I I
2 r1%~:fVALUI ASSICNK!lft'
I, 1 1
) I I%CEItV!C'1'O& ASS'ICNHDIT 1-. I
r tum SnmtA1'IOI l-• -I
Sr COKPONENT MODIFICAfION I-1 or EIGENVECTORS
I EICENVECTOR MODInCArION l-f 1 rOI CAIN lEllUCTION
7r EIG£NVECTOIL MODIFICATION t-• FOil S!NSITIVITT IUJ)UCTION
8 rILE MANIPULATION"l I
9 REDUCED-oRDER DESIGN1
NnmISlED?
tIS
DID )
Figure 4.4. Modified Spectral Assignment Computer Software PackageOrgan Hat ion.
i "
,-
-...
i.i
/
;
\
\
•\ r,
/'"/'
... '/.. ,,,--
•
65
tinues as described in Section 4.2.
Aflowchart for Mode 9 is shown in Figure 4.5. Several of the
existing progr&n subroutines including Modes 2, 3, 4, and 6 are called
from Mode 9. Three new subroutines are also called from within Mode 9.
These subroutines are described in Sections 4.5 and 4.6.
After Mode 9 is entered the reduced-order model is formulated.
Mode 2 is then called automatically and the reduced-order model eigen
values are assigned. The designer i~now prompted to enter the desired
partial eigenvector assignment for the full-order system. An initial
eigenvector assignment is calculated from the reduced-order model using
equation (3.24) and the assignment is approximated using Mode 3. A
gradient search is then initiated in order to decrease the error between
the desired and actual partial eigenvector assigmnent. Upon completion
of the gradient search, the reduced-order model feedback matrix is cal
culated and transformed to the full-order system coordinates. Are
duced-order observer is formulated next. Eigenvalues and eigenvectors
are assigned to the observer using Modes 2 and 3. Finally a time re
sponse is calculated and displayed for the combined system using Mode 4.
If the designer is not satisfied with the time response Mode 9 is re
entered.
Two portions of the above design procedure required an extensive
programming effort. Calculation of the cost function used in the gradi
ent search is described in Section 4.5 and the gradient matrix calcu-
1ation is described in Section 4.6.
,,
,

•-
..
-,•
.. '
/
/
/••II....~...
..,II
•
START 66
READ ORIGINALSYSTEM DATA
FORMULATEREDUCED-ORDER
MODEL
ASSIGN EIGENVALUESAND EIGENVECTORS INREDUCED-ORDER MODEL
IMPROVE EIGENVECTORASSIGNMENT BY GRADIENT
SEARCH PROCEDUREI
TRANSFORM REDUCED-ORDER MODEL F TO
FULL SYSTEM
FOF.MULATEREDUCED-ORDER
....OBSERVER
ASSIGN EIGENVALUESAND EIGENVECTORS IN
REDUCED-ORDEROBSERVER
ICONSTHUCT COMPLETE
SYSTEM MATRIX
~TI~lE YESRES~ONSE I
CALCULATE AND DISPLAY INO TIME RESPONSEI
RETURN
Figure 4.5. Mode 9
.. ..
. !
,

I• I,
I .'. /
I /•
I
I
/
,//.,//
,;."t'
67
4.5 Cost FunctionI
The cost function J that is used in the gradient search routine
is a measure of the error between the actual and desired partial eigen
vector assignments in the full system model. Calculation of the cost
function is accomplished in t\«) parts. The actual partial eigenvector
assignment is computed first using a subroutine called VACT. The actual
partial eigenvectors are then used to com~ute the value of J in a sub
routine called ROCOST.
Aflowchart illustrating VACT is given in Figure 4.6. The actual
partial eigenvector assignment is denoted by VIi and the eigenvector
assigned in the reduced-order modei is denoted by VIi. This is consis
tent with the notat ion ,used in Chaptel" 3. The partial eigenvectcr as
signment VIi of the full order closed loop system that is obtained by
assigning VIi in the reduced-order model can only be determined 'after
all reduced-order model eigenval ues and eigenvectcn are assigned and
the feedback matrix F is computed. The top half Qf equation (3.23) is
given by
(4.1)
-..
-
"•..i, ~...
For a real eigenvalue the subroutine computes v1n using equation
(4.1). If the eigenvalue Ai is complex the calCtliia.tion becomes
slightly more involved. Separating equation (4.1) iinto real and imagin
ary parts yields
(.

..II /
I
/
II
START68
/
/• ~, . ' \,<,.
•
NO
CALCULATE VIi
RETURN
•.'
YES
-CALCULATE VliRE
CALCULATE Vlilm
i = i + 1
t
I:1
-•
Figure 4.6, Subroutine VACT
(4.2)
1...
•
, .
'"
• ,1
69
Vli =[Vll+V12(Ai I-A2)-1 82FJv1i -[V12 (A i 1)-182FJv1iRE RE RE 1M 1Mand
VIi =[Vl1 +Vl2 (A i I-A2)-1§/Jvli · +[V12 (A i I)-1§/Jv1i • (4.3)1M RE 1M 1M RE
Equations (4.2) and (4.3) are used to compute partial eigenvector as
signments for complex eigenvalues. The actual eigenvt:tor assignments
are then used in subroutine ROCOST to compute the value of J.
A flowchart illustrating ROCOST is given in Figure 4.7. If the
desired partial eigenvector assignment is denoted by Vo and the actual
partial eigenvector assignment is denoted by V, then the cost function
hcal cul ated by
•
(4.4)
I:i
,
where a ij are arbitrary weighting constants. The weighting constants
determine the relative penalty between the elgenvector component errors.
For example, if one eigenvector component ha~; a much larger weighting
constant than the others, then an error in that component receives a
much greater penalty than other component errors.
4.6 Cost Function Gradient
The cost function gradient matrix is computed in subroutine ROGRAD.
A flo\'K:hart illustrating ROGRAD is given in Figure 4.8. It is seen from

,..
. \.
• S".., •.,. .~. .
"
START
CALL VACT
I = J = K=0
K= K+ 1
I = I of 1
..........
70
'. .1 ~
-•
2J = J + (VA (I, K) - Vo (I, K)) aI, K
NO .
NO
Figure 4.7. Subroutine ROCOST
' ..
,

aQCALCULATE ax~;
"
.'7~...... Sf,'
''>'' ,
"
,~'--
\
\, \
\~ \, \"i ~~\ •
...\ ~
rI:~
) 71I
1/'.. , STARTi
I" {
! .~ .
/,,
• /
'.
\.
I ,
r~ i
I
~
I'
r\\~
./ "........
RETURN
Figure 4.8. Subroutine ROGRAD

..,..,....---. ,-. I '1-......, •. --- -t--, "',
f ._ •
' .. '
•
• .~72
-..--~-
. '---.,\ .
equation (4.4) that the cost functon J is a function of the partial
eigenvector assignment v. Hence. it is also a function of the desig
nator matrix X which is discussed in Section 2.6. By computing a
gradient of the cost function J with r~spect to the elements of the
designator matrix XiJ • it can be determined how to vary the designator
matrix in order to reduce the cost function and therefore the error
between vD and v. Recalling equation (2.30). the gradient matrix is
defined to be
' ..
(4.7)
(4.5)
(4.6)
aJ
aXij[GR]ij • ---=---
II!LIIaXij
av- pqL 2 Q
pq{v -v
D} __ •
pq pq pq ax.'J
Solving for aJ/axij gives
Since Vo is a constant valued matrix.
--
\
-
"~
\"

\~
\ -
•
" ...
"
., .,
••
OHIGtNAt. p;~::.:: :3OF POOR QLJA!..rN
•
": -.... ~ .. _- "" ,
..........,....•... ! /
73
I
......... To evaluate aVpq/aX iJ • q is substituted fo, i and the subscript 1
is dropped in equation (4.1) to yield
(4.8)
................ ''''-
th . -Since Vpq is the p element of vector vq• then 3Vpl3XiJ is the
pth element of avlaxij. Solving for aVq/a: iJ • then gives
In order to evaluate 3F/axij • equation (2.73) Is modified to be
I -_._.... ~-1F • Wv (4.10)
and the element of F in the pth row and qth column is denoted by
f pq so that
. I-/I I II -
.........
(4.11)

,"
.,.'-, ...
I'/ ,I . ,•.
I .1.- .'... '.
, ....
74• ORIGINAL f..: :;'i' ..~
OF POOR QUALrrV
Rp is a row vector with a one in the pth column and zero elsewhere and
Cq is a column vector with a one in the qth row and zero elsewhere,
so that
(4.12)
\ ""'. -'"
,I •
\.
\ ,\ .
\\..\
"'-<-\' .
Solving for aw/axij yields
(4.13)
From equation (2.68),!-,
(4.14)
Therefore
'\ .., \\ .\
....:.-
...
"'"
\\
~ r
thNoting that only the j column of X is dependent on Xij
,
..!!!..- II [0, ••• t 0, [-MA.J ax/a Xij t 0, ..... , 0].aX 1j 1
(4.15)
(4.16)

, ., \.- \ , \
\""r C.- j
(j<
75
• Furthennore. only the ith row of Xj 1s dependent on Xij • It istheasily seen that aXJ/3X 1j is a column vector with a one in the 1 row
and z~ro elsewhere. Hence. equation (4.16) is written
, . /
aw-. [0..... o. [-M,\j]p o•...• 0] (4.17)ax tj
where (-~S]l denotes the 1th column of [-HAj ]. It is noted that
\.-,
"
and
av- l ..._a V_IU 1j
(4.18)
(4.19)
'\Since only the jth eigenvector is a funtion of Xij • it follows that
aV i[0, •••• O. ---- • 0,aX 1j
•••• 0]. (4.20)' ..
"," _..I
..... -- .
\ /\ /- , '-"'-~''''-''I/& ~ ..
!:'
\.1 ,'/ "/,/..:
--,
Substit~t1ng from equation (2.77) gives
.. [0, ..• , 0, ~N,\ ]1' 0, ... ,0],j
('l.21)
..

I/
' ...."
_.... , .•
-', \
I.I
76
where [NAj]i denotes the i th column of [NAi
]. To evaluate 3Vq/3X ij •
equation (4.21) is postmultiplied by Cq• Similarly. to evaluate
aV pq/3X i • equation (4.9) is premultiplied by Rp•
Hence. it is shown that the partial derivatives are computed by
selecting a~propriate rows and columns from the [NA] and [MA] matri
ces. TIds reduces the calculation of the gradient matrix [GR] to a
bookkeeping operation easily implemented in a computer program. It is
not necessary to numerically approximate a derivative quantity. Sub
routine ROGRAO computes the cost function gradient matrix using this
procedure.

/.I
!,-i
\ /
/
CHAPTER 5
DESIGN EXAMPLE
The design procedure described in Chapter 4 is illustrated in this
chapter by an actual design problem. A controller is designed for the
lateral axis model of an L-1011 aircraft using a reduced-order model and
a reduced-order observer. The resulting design is then compared to an
output feedback controller designed by Andrey et a1. [16]. It is shown
that the des ign procedure presented in thi s thesis is a viable too1 for
constant feedback controller design.
5.1 Original Lateral Axis Model
The lateral axis model of an L-1011 aircraft is used as the orig
inal full-order system model. The state vector x is qiven by:
Xl =1" = Yaw rate (Radians/second)
x2 .. e .. Sideslip angle (radians)
X3 .. P .. Roll rate (radians/second), x.. =~ = Bank angle (radians)
Xs .. 6 I" .. Rudder deflection (radians)r
x6 .. 6 =Aileron deflection (radians)a
• x7 = f .. Washout filter state.wI,
77'I
L",. "",-~,~>"""-,,, .....

/
I /
78'
.'.,•
Rudder and aileron deflections (states 5 and 5) produce changes in the
yaw rate. sideslip angle. roll rate. and bank angle (states 1·4). The
coordinate system is illustrated 1n Figure 5.1. Under certain con
ditions yaw rate 15 equal to the derivative of the sideslip angle with
respect to time while roll rate 1s equal to the derivative of the bank
angle with respect to time. The washout filter 1s a high pass filter
·for the yaw rate.
The A, B. and C system matrices are given by
-0,154 1.54 -0.0042 0 -0.744 -0.032 0-0.996 -0.117 -0.000295 0.0386 0.02 0 00.249 -5.2 -1.0 0 0.337 -1.12 0
A • 0 0 1.0 0 0 0 00 0 0 0 -20.0 0 00 0 0 0 0 -25.0 0
0.5 0 0 0 0 0 -0.5
8 •
oooo
20oo
ooooo
25o
•
,,,I
,/,, c = [g
o
o 0 0 0 0o 1 0 0 01 000 0o 0 1 0 0
-6]o .o
•
The system input. u, consists of components

79
Figure 5.1. Aircraft Axis System
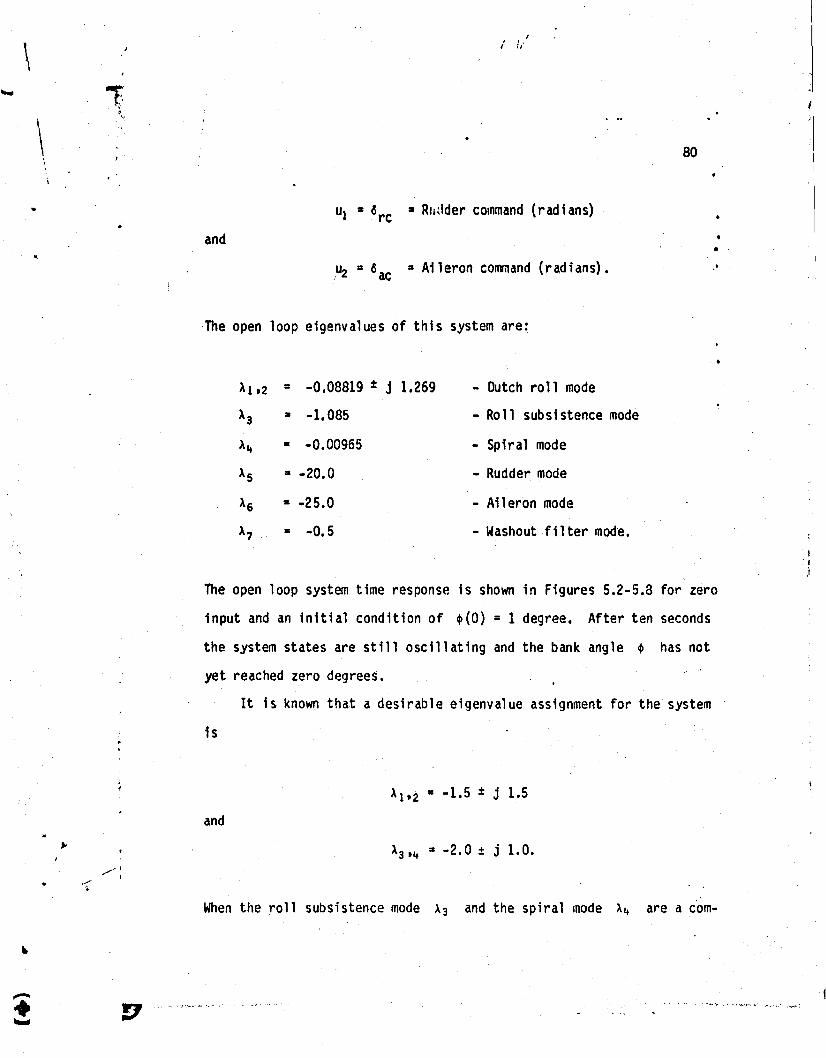
\
\-r•<,
80
U1 • ~ rc • Ridder command (r ad ians)
and•
;U2 • ~ac • Aileron command (radians).
The open loop eigenvalues of this system are:
A1.2 • -0.08819 ± j 1.269 - Dutch roll mode
A3 • -1.085 - Roll subsistence mode
>' .. • -0.00965 - Spiral mode
>'s • -20.0 - Rudder mode
"6 := -25.0 - Aileron mode
"7 :II -0.5 - Washout filter mode.
.'
I.,.1
,......../'
I
The open loop system time response is shown in Figures 5.2-5.8 for zero
input and an initial condition of ,(0) = 1 degree. After ten seconds
the system states are still oscillating and the bank angle ~ has not
yet reached zero degrees.
It is known that a desirable eigenvalue assignment for the system
is
>'1'2 • -1.5 ± j 1.5
and
).3'"'' -2.0± j 1.0.
When the roll subsistence mode >'3 and the spiral mode >'.. are a com-

ORIGINAl. PA~~ '90; POOR QUALrtv.
81
:I:
*I·
*1......
:It:I:
*
*•*
......
::::::......
...
.~
...........
.....::::::
I·
' ..
f ......... , .. •.. u ••• L I 1'- ".I. 1111.
~'Xl(
X~ xxX X
:w.
v
"
xX)(
x
xX.l'lX
v
"
¥..'"
X
"\'XX
X
x
)::: X
• 1~r: -01 I X
: {* X
• OCC(l:~ I X
* X:Ie X
*
:::
*.J~r,():t -t.
****• Z4r-:-Ol ~
*
*.~CC- {~~ 1-
*:It
......:l:.....
•,~r.: 01 ,-
****• ~4:: (;1 f
****• ~&C-(>1 I
****.40( 01 f-
**r~
c/
II
*x~ ~
~ *.OOE.oa ~X*****=**.~=*~*~~==.*~**=~==*.;*******~I**=~='*~=X**'t~*~*~:
.00:::: (;(J
••,
·f r 11 F
Figure 5.2. Yaw Rate-Open Loop Response for ~(O) = 1°
-..--
I
I.... ~'<k"'oiJ:)"'S-'U'!~:,Ir<--';;"""'-·-'-·-.~
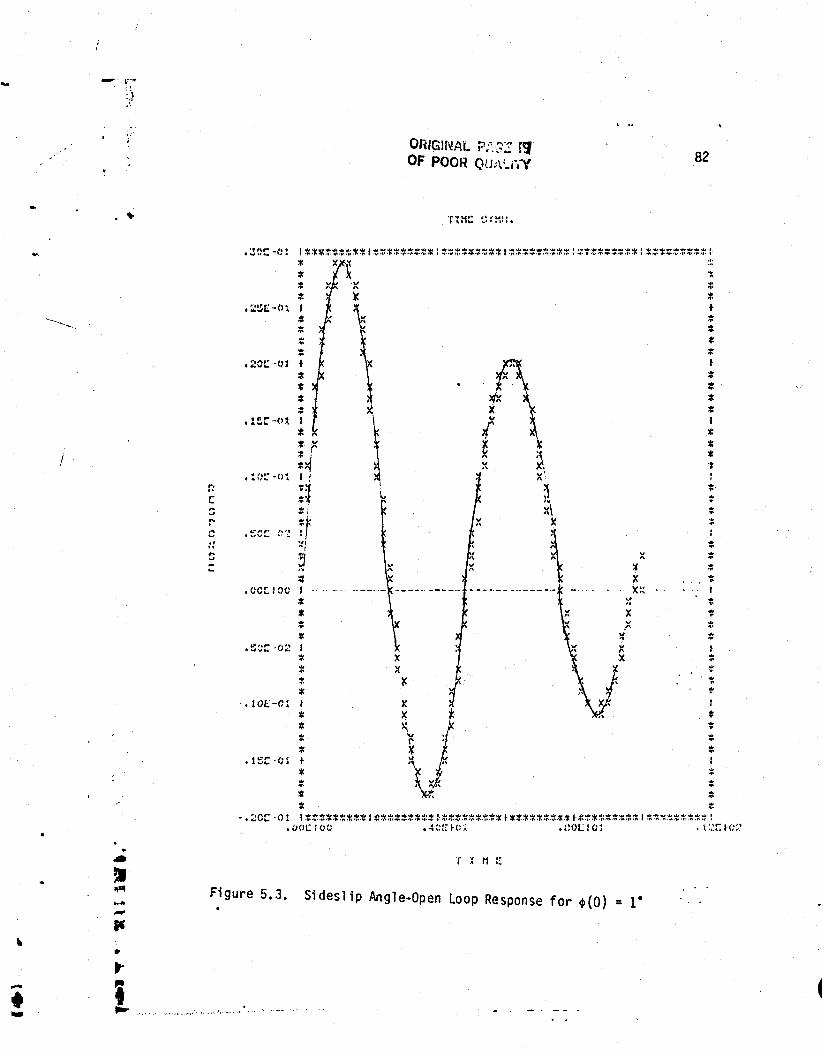
...
.'
i,
..... F7')
, .i
ORIGINAL iJ::,?! f9OF POOR QU-V:..fiY 82
...
Ir~
r:::
***• :;:~£ -CIA I
*:::.....=:
• 20t: ~~01 t:::
*:I:*.1::'::·-(lt I:::it X
;~• : {)t,- .. (:! I'
;1::
t:'f'• ~c!.: (,,~
~:
~::I
• 00[100 Iit:I:::::::
.~(;::40~ f
'*::::::*.• 1OE;;-() t I::::::..·r
:I:• 1t:;::···<;1 t
::::::::::::
~I
xv
...·~........'•.....:I:;I::It
.........*:::I:I::::
~,:::
" ·t.-v~".~
-:,. :::x\ :I:
l( .....
~:::
)( .....:t :::X ..
.~
" .."":: 'f.x ...
·r
" ..." .'.- :::~
" 1,..X ...
.~·.•.~
'l'
:I::I:....:I:.......·..*·.'
-•-
....-•to
i... , ..
-.2CC-01 t'~*~*~=**='***===~*!}***~**t~*+*~*=*=**~I'*~*'**~*=f~=~~=~=~*:.001.::0(; .4(::~~(~i .e()Lt(;~ • t:~:::I'(;;:~
Figure 5.3. Sideslip Angle-Open Loop Response for ~(O) = 1°

..rc
!\
.. ~'\,. ..,"- t(:
Or'l\ ....!. ,I" "" .. ' , 'n U: \':-.l ~.
OF POOH (~Ji .~_: .
83
*I
*
:::
...'.
..'...:::.,.....:::........'..
...'...'..~
:'..........~....j.
:::
*:;:....
:::........'.
vv.",
v,..t",..
v...
....", ...,1-- ....".- ... ), ... ·····xx
v...
xv.-
"....
v.,
1E,.
..I
~X.....
'" -"- ·,····X ".'
...,"
...,~
O"t:':"'II.,.• "",'1.• ''''\'
:::
*::::I:
.cc~·:··o~ t.....::::::It
•t~~r: (:1 I:::
**:I:•. 4'OC .. C>: I·
t
*:I::::
• ~eE" ~)i f........•.*:::
:I:
*, • .!,cr··(:l l:::...'
::::::
··.OCt .,,::. f
c
c,~
r......~
f'
/
.• 1~C:('(: J=*=*~=:*n.~===*~::~~:==*:1***=::==~'=='~~**:*====~4*~~*=~:~::.(;~r::()t ...~~(t·<:j .n(;:.:{~,"~ ,j~:::{::~
• J :c M :.:
Figure 5.4. Roll Rate-Open Loop Response for ~(O) = 1°
,

-
.../
/
,/
! .,,'
....
'r"'l..".: ,'..,VI.I ~ • fa. ,~. I 1\1.
. ~..• ... _' V ..
84
::: .•.~
:I: tt 'b
't-
::: 'M
.:'~C:Ol t·
* '"..:I: :I:::: :I:
*.....
• l1t:f·<;1 :
* ",:
:/: :I:
* :::.-,- * :::., .10C :·01 ·~' ·::: :::
:/: :Ie...*..
:/: ......10CfCl ~ X ··r: 1: XX 'b..
C 1: :!(,..:I: ;I('"
f' *....'
c • ?,~C :·c,<; ~.
N :I: :::~ :I: :t.r- :I: :::...
* :::• ';'~r: :-00 :. :.
::: :::::: .....,.:I: ....'
.' ... .../ .. .•,• f.:fJC: !H' l/ ... ...... ...
* :::... t..... ....."
..• G4U 00 : t·
:t: :::::: ;I(
*.....
:t: 'b...· coe.: O{: . \.0...
*...... ... .•t- ."...::: -f-
."
.
.;A~.<JfI
.-~--~" •
...-'~ 9•-..
Figure 5.5. Bank Angle-Open Loop Response for ~(O) = 1°
__ .....-: __Slr'_·;"'- ...", -_.- '--

\\
I!r
- ,....
'.j
'.'ORlmN!\L FF.:i::': :£,.OF POO;~ QU:dJ"j',' 85
• 1.• '\r" • l\"
• ... v ..... .V.I
...
.//
/./
:...
•co::-: 0(: I:l::l::I::I:
• t,Cr:: 1!,,, ,.:I:
1:.40:: :- (HJ I-
:l::l::I:.....
....-t,"."
...':l:I
*
{,
:l::I:.....t
"
i ,:
r~
c
c:I: *:I: :l::l: :l::I: :l:
.• ~C:::100.
:I::I::I:
•• 40C 1(;<1 •:I:
, • {,OC 1,.00 I.....:l:
:I:
....:::.....*
to
**:I:
~:
I·
··.10C:Ol I==~=~=~~~~~~=**~*=*.~~******~t**~**~***~**~=~=***·f*==***==*:.oorl·co .40:::(~1 .a0~:C1 .~~:::(:~
,,
-•..
.\,,,/ -\, . .::- .....
\ ; 1lIlP"t'1gure 5.6... , \,/ t:iI, \ ....
t.fI,.I'-;;/'....
/
Rudder Deflection-Open Loop RespIJnse for 4>{O) = 1·
........ __ -e:; ...-r._-_
/

1
1
1
1
1
,~ 1f
1~
\~
1~
i•1\•1
, '1iI
1;t
1~
1
1
.\'1
1. ,\
1
i 1I.,1\ '1,
1,\,
1
1
1
1
1
1
1
•1
~.1
1
86
c ..~.
ORIGINAL PAO! :~
OF POOR QUALITt
T f H :.:
.\a~:Ot t~,,~,t*'*:=='St~~~I:t.=:=*~'.r*t~s:=::~:::~~=~:t::~,s:~:,,~:
* :e ** «t t
•C~~I~O t I
~ ** ** •* t
.~OL·1 tlfl t I* •t ** •• •
.~~tIOU t tt *• ** •• «.~O(l~~ I I
• f* t* $t ~
• {,lot .O() xv:-xx)C"xxxxxxxvv:t:;X::::"XXXl(lC)(J1MlC)(lC~XX:'l(X)(JU(lO;)(X)Cltll~;': It t* ,* •* *
.=OCIO~ t I* •* *· ,* *-.40r,co t t
• *t *• *t *
,.~OCtoo t I* •* *• «• *'.OOC: 00 t I* ** ~
* ~· ;.1~CICJ .=********I':**$*.t't:3=::=~*'I*="**'**'=~:~::=:~~:~t=~~~~=:.::::t:.,,:) .4,)1:10\ .ne;'::Ol • .10:~:::{):"~
1':........rotl,...C
.,
.. v
•.- Figure 5.7. Aileron Deflect1on-~n Loop Response for +(0) .• 1-!W."",
, -,
• 'i'~.'.t'
~ ~
\t :... , .•
-'"'

•
•87
,
~
c~,.o"cC
If't~'*t,t:,==t'==t:I ••~~:;=~,:*~,:::~:.:!~~;~t:f~:::~:.,~:::~:· '* ~ :r• ~ ~ t
:' y *~• ::t.a; (IJ • ~
•• •• x *.)C •.::r.'Ot • ~ I• .., *• * •• { x ,• •
• ~~C.O~ • I
• X :l:• )( ** lC *• x *.::n;· 01 I • I= ~ X *· " .• XI *• lO *.::Cl: 0\ • ~ I
• I •• $c •* )q ** X *
.1l.COS • ~ I: ;.* •.· ~ .• 1::C-0\ • I• •· ', :=
• *.cot 02 t I
• *• *• ** ='.40C 02 I t
• =:* , *• ~ *.~ *
• 00t: I (10 It'''<x:u:un= u=un:::U::: I U:::::SU:::::S: U*:::UU:J: ~;=:n*;=*::u~*:::~=~~:• (H)r.: • ()(I • 4-(:r~ t () \ • n~::: : " 4 • .&.~:: : ()~~
. .
I
Figure 5.8. Washout Filter-Open Loop Response for +(0) • 1-
.__.---_...~

plex conjugate pair they are collectively referred to as the roll mode.
It is also known to be desirable for the roll and dutch roll modes to be
decoupled. This decoupling is accomplished by the eigenvector selec
tion:
..
ORIGINAL. il/\ ';'';' .~
OF POOR QUALl1Y
1 X 0 0X 1 0 00 0 1 J(
VI • 0 , V2 • 0 , V3 • X , V4 • 1 ,X X X XX X X XX X X X
88
,i
where X denotes "don't care.... PIIdry, Shapiro and Chung [15] closely
approximate the above eigenvalue and eigenvector assignment for this
system using constant output feedback. Eigenvalue/eigenvector assign
ment techniques are used to design the constant output feedback matrix!I
K[
3.35• 1.42
-0.159 -4.882.38 -6.36
-0.379]3.8 •
··lt·
r·i.?
I
The closed loop time response is shown in Figures 5.9-5.15. The closed
loop eigenvalues of the design are
Al,2 • -1.052 ± j 1.497
A3'~ • -2.001 ± j 0.9995
• -17.05
• -22.01
• -0.6989.

..
01"\'1':""'''· r·'.·.. ·r1"'\.\:.. ..... ,,- - ....~
Of POOR li'.J;;!..lt·/
ntn: HIHU •
89
,
Rc::~
roNoC
•0' x " to:
Figure 5.9. Yaw Rate-First Closed Loop Response for ~(O) • 1-

•.10E-()1 +*********u******** .*********uu****** f u***:un. t.uuuu f'
• • *• * ** *~ * *
.aO~-02 + +
* ** ** ** *• tC:I: -(I,:: + •• •• • ** *• •• 4C1a:'-()2 + +
· * *x *• *••~C1~-()~ +
*~ *• *• *.00..: +00 +--~---.------"7---------------~ X)()lMIOOOUElOOOElU,M ---- ----I• , xxxxxxxx ** •* *• *-.20F.-()2 + +* *• *• ** •-.40F.-02 + nx •* Yo ** ~x ** x •* Yo •
-.60F.-02 • +* •• •• •* •
-.aOF.-02 + +* •• •• •* •
-.JOF.-Ol .*********t.*******.t*********.*********.*****=***.*********••OOl-: too •040F. +01 .001: 1<11 • 121: HI~!
•
i '
, ,,~
RCGroNGC
ORIGINAL Pt.''::;:: !~,
OF POOR Q:JJ..UTV 90
'\
;
;.; ....
"- ...-- ....~if•
'r X PlF.
Figure 5.10. Sideslip Angle-First Closed Loop Response for ~(O) =1·
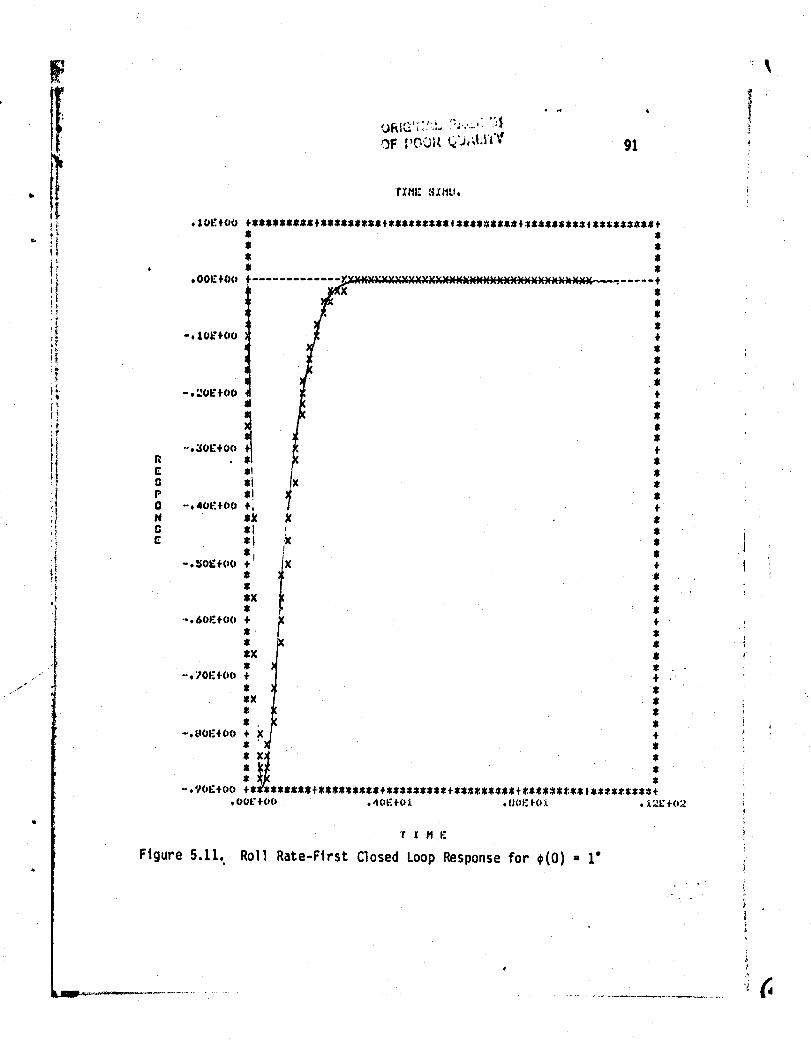
,
II/
II
91
• lOt-: HIO .......n.""nun.....uu.. f ....4U.. t ~UU**UUUUUU.
• •• •• •• *•oo.! HUI +------------- Yo xmo:x)G)UCXXXlOflClOUOOO()(IO()()()()UOlltlClOC _-: ---- - +
o X *•**+***•-.~Of+O~ +
* *~ :
-.30£+00 ~ !~ *~ *'I •
-.40t-:t<I(1 +i +.x X **1 ' **1 oX *
-.50E+00:' t!x :
• ** **x ** *-.60~+O~ t r' +*0 ** *.x *• *-.10~tOO I I
* *.x *• ** 0 *-.ao~+OQ t x +• . *: ~ :* *-.90~tOO 1* *******t*********.*********t*********t********••*********+
.001:t(l(l • 4(1l-: .(11 .ll(ll~ HIj, • 121: t(I~l
I"<tGPoNGt
../
•'(111 ..:
Figure 5.11~ Roll Rate-First Closed Loop Response for ~(O) • 1-
...~••,.u '."""",,,, r_~·.··,·_·,'·"

...
RESPoNSE
ORrGINl\t Fkl.,: 'SOF POon QI ',' I",'f i . v,,_. i •
* *• ** ** *
.ja~+Ol t t
* •• *• *• *.16~tOj t +
• *• *• ** t.14F.tOl + t
* ** .*• ** *.1~r.+Oj t t
* ** *• *• *.jO~+<ll ~ x :
*~ ** *.UOE+OO + +
• ** *• ** *.60~too t +* ** ** ** *.40EtOO t +
* ** ** ** *.20EtOO + +* ** ** ** -=.001:+<1(1 +t.********t·):.~~~~~~~~~~~~~~~~**uu*ut
• (JO~:" ()(I • 40r. t (11 • flClI: Hli • 1:.l[ t(J~!
;I'I
T X H ..:
Figure 5.12. Bank Angle-First Closed loop Response for ~(O) z 1-

...
~_._,.".
:r"~~' .._.~
ORIGINAL pt..GE :9OF POOR QUALlTV 93
.. .VO~-Ol +*********~*********t*********+*********t*********t*********t* ** ** ** *
.40~-Ol + +
* ** ** ** *.001::+00 +-.. •
• "" x *• *• *• x *-.40£-01 + +* ** ** ** •
-.80~-Ol + ..R * *C * *S * *p * *o -.12~+OO" ..tl * *S * •C • *
* *-.16£+00 + i. , ..
* *• *• *-.~OE+OO :" :
* ** **~ **1 *-.24~+OO X +*, ** ** ** *••• 2l:Jf. H)e) • +
****-.J~~+OO *********.*********t*********+*********t*********+.********••00~too .40~fOl .OOEIOI .J2tt02
'r X H I:
Figure 5.13. Rudder Deflection-First Closed Loop Response for ~(O) =1·
I.

...
\
lINE aINU •
ORIGINAL PAm: 19OF POOR QU~LlTV
•36E+Ol +*********+*********+*********t**~******t*********.*** *****t.+* -=* ** ** *.J2F.+Ol + +
I :**.~!aF.Hll +
****.24~~(ll +
****.20F+Ol +
R *E *~ *p *o .16E+Ol +n x *s *E *
*.J~E+Ol +
****• (to!-: HI(I +
****.401::HI(/ I-
****• O(I~ telO * ~---~)()()()()()()()()()(J()()()()()()(J()()()()()()()(l(xmu()()()()()()()( • :
* ~.... ** ** *-.40E+OO t*********t*********.*********t*********t*********.*********t
• (I (II! too .4(IF.Hll .I,I(:::H:1 .1'~::.(l~:
T I H F.
Figure 5.14. Aileron Deflection-First Closed Loop Response for '(0) = 1.
r... :.~,.
~

•-,~:.""-.,.,.-,. ...<.,,,,.:" .~. ~
'I:_"'~'-I4>_r'''_'''''''''~' ,.;.,
l95
omc!t\"I.t ~: ./~'": ~
OF POOR QU;~L1'fi
•
,(,
t.
rXM!-:
Figure 5.15. Washout Filter-First Closed Loop Response for ~(O) =1-
* ** =-* ** *.10E-Ql + +.. ** *• •* *.26E-01 • +, *• •• •t *
.24~-Ql • +* •• •• •* *.2~~-01 + +
• *• ** ** *.20E-01 + +* •* ** ** *.801::-02 + +* to* ** ** *.601::-0:': + +* ** ** ** *.401::-02 + +* ** ** ** *.20E-02 + +* ** ** it.
X *.001-:+(1(1 ***UUUU****UUuuuuu u;*;**~**i*~:l:~'",~",~,."~,,,~$~,**'***:U**u+
• (1(1f.:t(W .4(1:~+(I" .(l<ll:t<lj, .;l;.:r:HI;'~
RESpotlSE

(
. ..;
96
-0.0029 ; j 0.00120.0045 ± j 0.0053
1-0.3999 ; j 0.2000
,1
0.03066 ± j 0.3488-0.0036 ± j 0.00040.0013 ± j 0.0011
The first four components of the first four eigenvectors'are:
5.2 Reduced-Order Model Design
Since the open loop values of >'s - >'7 are known to be desirable,
and the rUdder, aileron, and washout filter states are unspecified, no
reassignment of these modes will be made. Therefore, they are not in
cl uded in the reduced-order model. On the other hand, Al - A4 are to
be reassigned and are included in the reduced-order model. The full
order system matrices are transformed by equation (3.3) and partitioned'
It is noted that by using constant output feedback that the four eigen
values >'1 - >'4 are placed almost exactly and that the roll and dutch
roll modes are decoupled. However, the other eigenvalues (As - A7) are
also moved by the design. The design procedure described in Chapter 4
is now used to forrilulatean alternate design that exactly places >'1 - A4
without changinq As - A7. Eigenvectors for Al -).4 are also assigned
to achieve roll and dutch roll mode decoup1ing. This is achieved with
out modifying the eigenvectors associated with As - A7. Furthermore,
this design is done using a reduced-order model to specify a constant
feedback matrix for the original full-order system•. The full state
feedback matrix is then imp1enented by dynamic output feedback.
i
lf't•i!~I--'r',.i
i.?iI •( .r,-I. V
. :~
~
•IIr,t
t,Ir.~iIIll!rfli~
ri

",,~'
f>
•.... _-... \' ~,
t,i. \..t
~ .
•
97
as in equation (3.5) to yield the reduced-orde~ model system matrices
•-0.08819 1.269 0 0-1.269 -0.08819 0 0
o 0 -1.085 0o 0 0 -0.009165
. -1.706B- 0.3961
, 1- -0.2772-0.2698
-0.025800.06988
-0.2878 •-0.1528
Spectral assignment synthesis methods are then· used to assign the eigen
values
Al,2 = -1.5 ± j 1.5and
A3 '4 =-2.0 ± j 1.0.
A partial eigenvector assignment that achieves roll and dutch roll mode'
decoupling is given by
,
l
. An initial attempt is made to assign the eigenvectors using equation
(3.24). The partial assignment in the full order system is found to be
i. !
Ij
-0.10 =1= j 0.040.08 ± j 0.10
20.20 ± j 0.11 •-8.54 =1= j 3.91
o_ 0
V3,4 - 20-8 =1= j 4
,20
6 ± j 7oo
19.44 ± j 0.336.76 ± j 7.251.06 =1= j 0.10
-0.42 ± j 0.64
..

•
rf
~ !!
98
The gradient search routine described in Section 2.6 is now used to
improve the initial vector assignment. Elements of a weighting matrix
are entered into the computer and a yalue is calculated for the cost
fucntion J using equation (4.4). A cost function gradient is calcu
lated as in Section 4.6 and the initial eigenvector assignment is varied
to reduce the cost function. The weighting matrix is varied to increase
or decrease the relative importance of each eigenvector component and
the gradient search is continued. This procedure is repeated until a
satisfactory improvement of the initial assignment is achieved. In this
example the final partial eigenvector assignment in the full system
model is given by
19.45 ± j 0.346.76 ± j 7.250.45 ± j 0.33
-0.07 ± j 0.68
-0.10 + j 0.040.08 ± j 0.10
20.20 ± j 0.11 •-8.54 + j 3.91
The vectors are scaled to give
10.35 ± j 0.370.02 ± j 0.020.003 ± j 0.04
-0.005 + j 0.0020.004 ± j 0.005
1-0.424 + j 0.191
. '
It is seen from the above vectors that the roll and dutch roll modes
have been significantly c1ecoupled. The required gain matrix in the
reduced-order model is given by

.' ,I
99
-0.131 0.003-0.008 -0.120
g] ,-1
o-6o
•
-1.650 0.169 -1.124]0.583 -5.810 31.18 •
-0.116 -0.3722.10 4.35
[
-5E.g
-3.13-6.03
F • [ 1.319-3.854
.. ,
- .. -, ..•...,._.,-"'.""".,.......~-_._--"'"....--"""
'F' • [3.661.54
The constant state feedback matrix in the full order system is cDq)uted
using equations (3.9) and (3.10) to be
In order to implement this full state feedback matrix, an observer is
now designed by the procedure described in Section 3.4. The observer
eigenvalues, AOi ' are selected so that
This selection makes the observer modes faster than the modes contained
in the reduced-order model. The observer eigenvectors, VOi
' are arbi
trarily assigned to be
The observer matrices are then calculated to be:
\

~...~i ~. ..1 ~
•
•..._._-----------,,- .~
J.~
I,{~.
100
JI.
and
R _[0.287 -0.029 -28.3 -0.372]0.184 0.710 -17.1 4.35 '
[089•2 2.35 -17.8 0.124 lG· -42.2 -83.7 57.6 -0.116-5.29 -0.035 48.5 0.270
TU • tg 2~l
.4
..•....II
II
The observer is now used to implement the full order system feedback
matrix 'F. The closed loop time response is shown in Figures 5.16-5.25.
It is shown that the response of the yaw rate and sideslip angle for
this dp~ign are more desirable than for the previous design since there
is less disturbance and faster settling time for both states. On the
other hand, the roll rate and bank angle responses are almost identical
for both designs. The controlling surfaces and washout filter states
are all well within the physical limitations of the system. This illus
trates that a viable constant full state feedback control system can be
designed for a large system using a reduced-order mOdel and that this
feedback design can be successfully implemented with a reduced-order
observer.
5.3 Summary and Concluding Remarks
A new design procedure for the co~trol of large systems using re
duced-order models, reduced-order observers, and spectral assignment
techniques is presented. Areduced-order model is formulated containing
.I: .
.1j

fJi-,-.. '>
. "~""!'.''''''._'''~
( .t t,;
!,1:"rI
• t
.... , .'ORIGINAL PAGE ~UOF POOR QUAUTY
TlMr ftlHU.
.'->_<1'f"~~,~-"",,,
~, ~'. .".j -~'h"'--'" _it-- ;"'....,~.~' .:"',
101
. ~
RESpoHSE
,~~~-('1 t •••••••••t •••••••••t •••••••••t ••••••*••t •••••••••t •••••••*.+• *• *• •• ••~U~-Ul + +• •• •• *• ••J~E-Ol + t
• •• •• •* ••Ja~-Ul + +
~~. ~·' .•2~l:-(ll + )\ +· ~ .· \ ~.)( " ,• x ,
.20~-(ll + X +.ll i •* ~ •" l' •.' ; .• 1h£-('1 +); X +'• x ".' x •* x •'A X •
• 1UF.-<Jl + ' +• M *• x •• x •
• ~O~-<J2 i~ ~y. :~ .~ .
• O('F.+<'U :-------~ ----M}!)O()O!IO()!)!):X)()()'!l()()()()()()(!E)()()()()()(X---------:
• -~ *• •• *• •
-. ~(JF-()2 t ..U ....tluUU....t .......**tu******....****.....uuu**t.001:'+(1(1 .4\(11' to1 • t'$Cll:' Hll • .i. ;:I~ tv?
r X M I;:
Figure 5.16. Yaw Rate-Second Closed Loop Response for ,(0) • 1-
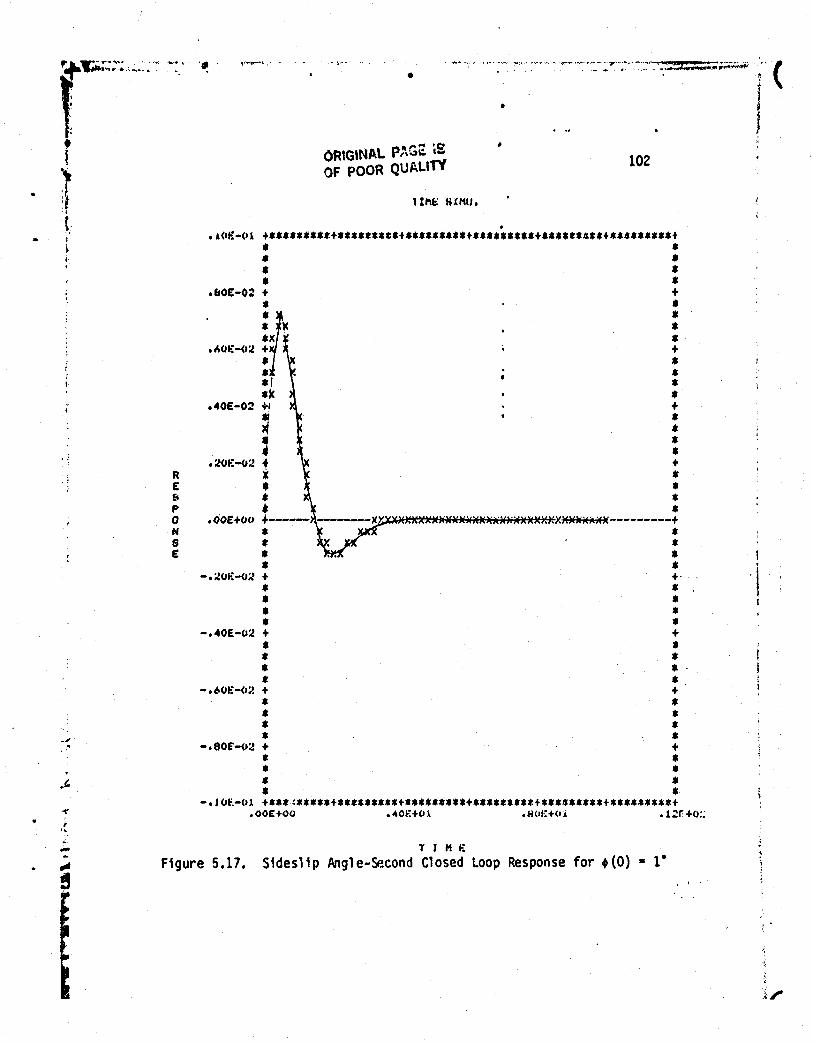
j (J
102
•
1I"~ tUHII.
•
ORIG'NAL p:\Ga jgOF POOR QUAUTY
'\!'~'i-"
.••~K-~l ••*••***.*•••••*•••_••••••••••••••••_._•••••_._;,••••••••••*.
* ** •* ** *.&OE-02 + +• •
=r' :.~OV.-~2 + +• •· . ; ../ .•k •
•40E-02 +' +
= :: :.20~-02 t +
R ¥ *E • *~ * *p • •o .OOE+(I(I +---- .. . ... ..X)Ot)(i(i\)(l(---------+
N • *S * *E • *
• *-.20V.-02 • •.
* •* *• •• •
-.40E-~2 + +
• *• *• •• •-.~OV.-~2 • + .• •* •• •• •
-.80f-~2 + +* *• •* •• •
-.jO~-~l +••*x.*~.*•••**.**.*+.***.*•••+*•••*.***t*••***.**+***.***••+.00£+00 .~OE+Ul .HU~+Ul .12r+O~
.".
~"'::~'''''' ~. ~......•'~~-'* •.•. ,,_.. ~ ..
l,f
Jt
....... r J " v.Figure 5.17. Sideslip Angle-Second Closed Loop Response for +(0) • 1-

1
:1
~":l-~
";
1
103
TJ 11£ Fs X11/J •
M ., •• (',ORIGINAL ,,:,t:.;, '~.
OF POOR Q1JALl1 \(
.tOEfOO +•••••••••+****••••*+***.****.+*****#***+.********i***,.****+• ** *• •• *.OOEfOO +---------r~-.. ~xxxxxxxxxxxxxxxxx~xxx---------:
. *•-.10EfOO +X *• •
••- ••••+•• ~ ix, •
-.;iOIHOCl + f
* •• •• ** *
- ••••+•• ~1 ~
-.:sot-:+oo : I :.~ *·' .-.60EfOO + I +• I •
• I *• I *
-. i'CIF.+OO :xl ~ :* I X ** I \ **XI X ** x *
-.HOEfOO : t~ ::~~ :
-.YOEfOO f*~**'***+*********+*********+*********+***t*****+*********+.OOF+OO .40~+01 .~O~+OI .42Ct02
RESpoNSE
: ~
I
· f
n..-'"-.....-...~ -.,........~."-..--li..-:._.~,.... , .• ''''~'~ ''''"_'_''''''_'"''''''''''-'''''''''''''-'''''''''''.'~'''''''''''''''''_''''_''''.''~''9.' $ i+ *., •.•. ' - -,._-- .. -. . .. ," ,, ,
f ~,r.,.;'~ ~\p:'I'·:I.t·t (
: t· ,
I
..
•
Figure 5.18. Roll Rate-second Closed loop Response for +(0) • 1-

rXM ..:
•••"
.. '4'·' ;;
104.'.."" .. tSORIG1N~.\. ,'n-_I":. !
OF POOH QtJl\tJTY
.20£+01 +t********+'*'*~****+*******t*+*****=***+**.******.*** ******i* ** ** ** *.la~+(J1 + +
, *, .• •* *.16£t01 + +* •• •• •• •+ +* *• ** *• •+ +* •* *• *• *1. +
****. ,+*t**.60~+00 +
****.40F.+OO +
~ :* ~ *
.20~+O(J + +
* *• ** ** *• 00":+(1(1 u********+. dmf)()()()()!)!)()()()()('!)()()()()!XXletXXX~~~*****.u**+
.• (J(.IH(I(J ."('1::+(11 .fW..: t(1j. d~!r;t<I~!
~---"_:'::-:-::.l'"7"'-':'!!!""7''''''.~~~"'",:""~"~,~,...,.,-..."",,,,,,,,.~-~.,~ '-'.!,"'f*~ .....:: .."'. . ' •.I ~i. ,I
~
!It
...
•14~+01to'
• 12":+CHRES".0 .10":+01N0E
•H<J,.: to(I
•
Figure 5.19. Bank Angle-Second Closed Loop Response for ~(O) • 1-

,...~
haS ' .. .;; t ,.,.h· ". A ,. 4 4;} § '# .. ' U M f P 4 .'iJj S »-cc<' , 1.4 . J 1) :: ,
\,.,..
i Z
..ORIC:~'~~:: ;-."/~::!.~
OF P0C:~ QJ,\LIlY 105
U111:: 'HIm •
.1
·1!
ItIIi
ff
x
x
x
-.40F.-(11
-. 12F.+(1(1
-.16F.+(1(I
•HQ~-Ql +********t+********t+*********.•*,****~**.****#****.** ***#~**+* ** ** ** *.4~~-~1 + +
* } ** *• ** ~ . *.O(I":+(IQ --1"-------1. . )()()()()l)(X---------+
~ *~ *, *
~ :•••*f****+•***+****f*** *-.241'::+(1(1 ~x :
~ :* ** *-.:lfn'::fQ(I f f
* ** ** **, *-.32£+00 +*********+*********+*********t*********t*********+*********t.(I(l~+<I(l .4(11:+<1:( .1i(l.:t<H d:.'r.+(1:~
RESFaNsE
..
'f X If ~
Figure 5.20. Rudder Deflection-Second Closed Loop Response for ~(O). 1-
,I

·r(H.~:
Figure 5.21. Aileron Deflection-second Closed Loop Response for 9(0) ='1-
II
I..Ij!I~.
\
-t1•~
i!,j
"IJ~jJ.
106ORIGINAL PAl:,:.,~ :~
OF POOR Qu;,LnYTXI1l-: 6XHlI.
R£SpoNS£
I.Ii
r0'
r . ~,.'.
•/i
..-' .'
I ,
/ . .t-
•I
....... ...
!t.(If' .I ~.........t",-l

I.j
• j
107
.2~~-~1 +*********+*********+*********.*********+*********1*********+* ** ** ** *.1aF.-~1 + +
* ** ** ** *.16F.-~1 + +
* ** ** ** *.14F.-~1 + +
* ** ** ** *.1:U::-~1 + +* *to ** ** *.10F.-~1 + +
* ** ** *..• •••aO~-~2 + +* ** ** •• *.6~F.-~2 + +
* *• ** ** *• 4(1F.-~2 + +
* ** ** ** *.20E-~2 + +* x *• y.xx~ *• xx ' *x , .• .. ..
.~~F.+~~ .********.+*******.*+*********+*********+*******xxx*********+.~OF.+~~ .40F.+~1 .BO(+Ol .12F.02
RESFaNsE
'(111 ..:
Figure 5.22. Washout Filter-Second Closed loop Response for ~(O) • 1·
•
~
I
~ ;~. ~~..t" .",;I •
~
!,_J
I...... t._
.".d,..f ~.
·1
/
-_.~-----

l
.$,"
j.{,I
. ;
t'
108
ORIGINAL PAC~"m
OF. POOR QUALlT't'
nl1E' SI1111.
•fWI-:t(I(1 t*********+*********u**~::****u*.u*u**{ u*u**U{ u*.u:**** i-
* ** ** ** *.60Etoo t t
• ** ** ** ••40Etoo t t
* ** •* ** *.20F.+OO t +
• •* ** *• , XY.Y.X •
•OOE+OO 1------- --------:Yo *
••-.20~too t
- *: :• *-.~OE+OO ~ t
* •* *~ *~ .
~.60~too t: +*: *.x *.i .*: •-.80F..t(1(1 +x t
*1 Yo *.X *=v :-.10~+Ol + +• *• ** ** *-.12F-+01 +*********+*********+****t****+~********f*********+*********+
.OOF-too .40~tOl .HO~tOl .12Et02
RESPoNSE
•
rXHE.
Figure 5.23. Observer State #1 - Closed Loop Response for ~(O) = 1°

•
•
RESPoNSE
oJ
•
'
0 r""~-1" r~ORIC1NA... "'>':_'l';. '<.1OF POOR QUh!..rlV
109
TXI1E SXiilJ •
•20£+02 +t********+*********+*******:*+*~***~**~+*********f*********+* ** ** ** *.18~+02 + +
* ** ** ** *.-! 6f;+0:.! + +
* ** ** **X *.14~+(J2 + +
* ** X ** i ** ¥ *.12~+0:.! + X +* \ *:/ :t, *.10F.+O:.! +f +
*/ ** ** ** *.HOF.+Ol + +
X **1 **1 ** *.60£+01 ~ +~ *
= :~ *.40F.+Ol ~ +
= :* *.20F.+Ol : y\ :~. ~ *
.00.+00 1 +~.,••"""""••_ •••'"'"•••••"".._ ••••••••••;.00F.too .40F.+Ol .80F.tOl .12~t02
Figure 5.24. (»server State #2 - Closed loop Response for +(0) = 10"i,.,\
:;i
-,-.~
",'!t'.

1 :£ M F.
Figure 5.25. Observer State #3 - Closed Loop Response for ,(0) a 1-
,~lI,1
!
110
~• '~" . 1.-- 1(
.j .:;,
ORIGINAL P;',\.G,;: ~'j .OF POOR QUkU'Ci
'rnIl-: SxHIJ •
.I ,
.72E-(I1 +t********+*********+*********+**~*~~**#i******t**+*********+
* ** ** ** *.64~-Ol + +
* ** ** *~ *.56~-01 + +
* ** ** ** *.4HF.-Ol + +
* ** ** ** *.40F.-Ol + X +
* ** **k **1 *
.32~-Ol ~ +
~ :*• 24F.-Ol +
* *~ ***• 16F.-Ol +
* '.'***.HOE-02 +
****.OOF.+oo +
**** to-.H(IE-02 +*********+*********+*********+*********t***~*****t*********+
.O~F.+oo .40F.+01 .80E+Ol .1~~+02
~
i
f~
[ ~
•,i ~
RI : EsP
, . 0!': N
SE
! \
\,;1·.... :...
'. ~
'.t,l: ~..t. rI,~. ~, ,~ ,'., ,II .~ .t"i
~.f.. ."Z.:-.· i ......
rrf-:'I {'I. ~.
..
•
.'.

r" .'
,(
,t
ff,f
..
..
, .:. ~.
} ;t.., •;_.. '.,t.l '<
I •I . .-
)
REFERENCES
[1] P. I. Carraway and R.R. Mielke, "Spectral Assignment Using ReducedOrder Models," Allerton Conference on Comnunication, Control, andComputing, Vol. 21, October 1983.
[2] D.J. Luenberger, "An Introduction to Observers," IEEE Transactionson Automatic Control, Vol. AC-16, No.6, pp. ?96-602, December1971.
[3] S. SrinathklJ1lar, "Eigenvalue/Eigenvector Assignment Using C1ItputFeedback," IEEE Transactions on Automatic Control, Vol. AC-23,February 1978.
[4] B.C. ftbore, "On the Flexibil ity Offered by State Feedback inMultivariable Systems Beyond Closed loop Eigenvalue Assignment,"IEEE Trans. Automatic Control, Vol. AC-21, October 1976.
[5]
[6]
[7]
[8]
[9]
[10]
H. Kimura, "A Further Result on the Problem of Pole. Assignment byOutput Feedback," IEEE Trans. Automatic Control, Vol. AC-22, June1977.
E.J. Davison and S.H. Wang, "On Pole Assignment in linear Multivariable Systems," IEEE Trans Automatic Control, Vol. AC-20,August 1975.
R.A. Maynard, R.R. Mielke, S.R. Liberty and S. Sri nathklI11ar, "ANew Spectral Synthesis Procedure for Multivari able Regal ators,"Allerton Conference on Communication, Control and Computing Vol.16. October 1978.
R.R. Mielke, R.A. Maynard, S.R. Liberty and S. SrinatllBfcll11ar, "Design of Robust State Feedback Controllers Vi a Ei genvabe/Ei genvector Assignment," k:'j]omar Conference on Circuits, ~stems andComputers, Vol. 12, No~ember 1978.
R.A. Maynard, R.R. Mielke and S.R. Liberty, "Eigenvect«Jir Assignment for Noise Suppression," Southeastern Symposium Olil SystemTheory, Vol. 13, March 1981.
T.M. Owens and R.R. Mielke, "A Spectral Assignment Gaihlllftbdification Procedure," Southeastern Symposill11 on Sy:sft:em Theory,April 1982. .
\l
./

[11] R.R. Mielke, L.J. Tung and M. Marefat, -Design of MultivariableFeedback Controllers Via Spectral Assignment," Progress Report,NASA Grant NSG-16~O, Old £X>minion U1iversity Research Foundation,June 1982•
[12] L. Zadeh and C. Desoer, Linear System Theory-A State-SpaceApproach, McGraw Hill, New York, 1963.
I/.
..
..
[13]
[14]
(IS]
[16]
,-.' .,"
•113
T. Kailath, Linear Systern$' Prentice Hall, Englewood Cliffs, NewJersey, 1980.
W.M. Wonham, "On Pole Assignment in Multi-input, ControllableLtr.ear Systems,- IEEE Transactions on Automatic Control, Vol. AC12, pp. 660-665, 1967.
M. Marefat, "Oesign of Multivariable feedback Control Systems ViaSpectral Assignment," Master's Thesis, Department of ElectricalEngineering, Old Dominion University, Norfolk, Virginia, Inpreparation.
A. Mdry, E. Shapiro and J. Chung, liOn Eigenstructure Assignmentfor Linear Systems," Technical Report, Lockheed California Co.,Burbank, California, 1982.

~
:f' ,• 'i'
t •~
1.. ~
..• t' •.. I: •
·
•
,.
(,)
f
•,.•,!tI
•
APPENDICES
Appendix Acontains a software listing of the modifications to the spectral assignment computer aided designpackage discussed in Chapter 4. This is followed by anexample of an interactive design session 1n Appendix B.
.tt
•

t
.._. ,.._._--_.. __.-...._-_...~
"•;
1II_"'"... ""'ot:I'C MIHCI 1I1l11 11.\111 1I"1f1l:L Fl. CIIIlMlI:[IU _lrlUllllllC-'lt!ll. ltllUlINl"!l 1:l\Il£..1 lIl:l<"t: ••lI:iIlI-lI.C tlN:rtRIlI.. AlmlllNIt..,,, 1l(l1llWftU 1l(JI_Il.RtIl:m;r.llr_Mlt:tl.r..'t.lIIy._·I.C·l""'llll.. IJl:YILT!!I '''''''' UIIlfl 11 I.'''UI ""f! SC 1I11....1l: 1~1I11l11 1".~'O.IlI-:"'(J1.l ''''''' "'''IIS. ml':lOIMIl
Illrlt;C:I< 11R1I1IhllRC10)1:_1 U lI£IUIIOI.lt 10.1.. 'RrAi l!<tlll,t( 10,.I.Ill/lfIU", .WUO.IO,.W!lUO.lo..-=llUO.IO'ltl·AI III Nt:', 10.1'" .1111 I""IIOI""JIIO.IO,.M ""110.10......",1( 1... 1'"RlM "'.MI UIO.III"M ""I2t 1•• 1.... '" ""2IUO.IO"'" M~;;'UO.ICI>'ltl AI "' ICt. I II lor IIlU 11I.ICOI.Fnl.2(10.10IoLC 10.10,.EIIBSIIO.1C1,ltl·1lI.. IolMIIIO.IOI>.l:I MIC 1... IO,.I:t~CI... IOI.FI.NlC 10.10'
C"'-''' Al.:11 St' FII [Ill BYSIlh.Fl"'IlX UHEIcf n-201.l .LUlItIlIIlllll.. M (1o. 10,.0110. 10..C:I A'I( 10. 'O,.IIUNClO.,O'II(Al xu 10.10' .W.c::o,.t: C:/II' .XI:.oo, .1.ltl:C 10loUIIC 1010101.1110'ReAl VI 11'.101011110.10' .lIlt111C 10.1",.re10.10' ._rc11O.IP'ltl:h1. A' 1".IOloI(lO.IOloCUO.III' ....:/oRfAUJlJIC.O""UH/SY9.1•• I,C,lIRtI,IOfIl .. tts.ftl,HO1:000001II/flll(,/F .,..11\ rIEl UII.II£. L IlV1"I.R/llI..lfoll/0t"llttttOH/vt:r.I'WII,£. x••1.1.... XX.V.UINV.~ItIf1C'1:M/RU/,*100.un.fJfS ~ Vl1E a.IiLAIt:'• lRIJitl*,L1UkII.MNI2"'-:Dllti:l4!l1l" 1:11I\Il12'EXnl<IlAl Il!ll~JSI.RIICilIAIt._:!._J._.
1:Al1. IJ[k!~ I 13. I.E_ D'IIN:NCFU.E.. ·RtIlHfo·.Mt:r.n..·.IItFCr·.uu... I02....t·J:.11...20MAIlC ru.REt.-UHS.IlIoNlh IICI I. ttRORI .."c III.REt-:tc CAC 110 I.n .I.JooI.ICS.. II-I.1I:I1MAPC 11I.lItt-n CIIC n.I.I.. I "I .. n-I.tr.ll.MAPI 11I.REt-4' Ccr.c II. UI .I I.NS'.II- ••1""
C............... rHIER ORIOIx.t. EIGINVEr.n~ .WUI:16•• ,
• I"OI<1IAIIIX.4111 _. 10 OIl" IIE1I IIRIOIx.t. Elllf:llIIlC:._nMAIlC:!."..-If Cl<k.I.E.(I)lIO TO 61...1
7 IIIH'EI6.:!I.I11 rGl'<llAfI:'t'I.-IIID1 IlRIIUIMl EI._CI. '''121
11(""'5•• ' ,1101".I"v.tI' .1-•• JlSIl:lIrnl.....IIU 4(1 Inl.HSl:lIll.r;l-l:ftlESltIlUI'..2
40 .·IINIIIIlIE'FII:n,nlf.IE.p.IOO 10 112OO·6·j·· ..tr.l"ClIl • .I" ).II,n I
• L"Ut!IlHllE....111
$2 .1-.111If «.1.1.£ •",U01' 10 IIIR' 11.' H.REI.-'tc II/OC II ••.11 .......HS), 11-10If'J I
•• ...IHIIIII.."1.AI"3~.Rl·r.-'1CC\'lJC I' .IJ),1J-1.1f!l,.1 I-I.II-J..'5 IlflUt:e.t::.Mt:l-11C CI/OCl"l.Jh'_~I.IISIoII- ..~It1:Al1. m·...·lIc'"" lIA'RUlo ••IIO.rc.. c:s.Iftl••,Uklfr(~.t-';'!)
...~ F~llAlClX••'IIIlUII1t III~ Mn _.llES or \I"Mt:"PI~ •• IU.II CkI<.I.[.(lloo '0 AU
APPENDIX A: SOFTWARE LISTING URI1E C6.614)614 .OkIlA'UX.221tr.'UEJI lI WolUC)
REAPCS VltC, ••n(,c. '" 1115
C............ mAHlIl'CItm Sl'STUI ., "1llf\C 1••ffUX .6U C:At,. I.fIlV:1fCVlto,nlo 10.VlICW. '''''r.Ut.ttI....III. "'"
C; '·All!'.r •C CALI_ U!""-"CIIIMU':V' .6.VlUt.'V.IO.w.;.Ie:•• '
C:At L 1I1tl."'·CVOItIV.A.H!IoNS.IIS. at V. I :r.lul:All VItI••••• CU.VC"Hll.IIS••n..10 /III. "'" Inu00 Ill" l·hMlDU 616 ..• ••HllAlttiAl-ItI'!iCAI.NtC ......II CAIISI....L r.Z£IcCUALMC.......,L.....rc ...
616 ,:utttllll"C PAlI!'l ;,
CAlL lJSIII"ftClWW."", .S.ALAlh NS.w.;•••CAt I VItIlLfI·CW.W•••HS.HS III•• II•••Nh 1(1.IER.
C PAlIf>I: ;)C CAt.L US....ftC:st • .MIt:s.IL""••".HS••, •• J
CAt.t VItIll.n'CC.W.NO.NS"nh 11I.lo.CIAth .1I.IElUC PMISf 4C .CALL UM,.-ftC:5IlCLMI.S.CI.M.III.IlO.HS.4.1;.............. PAm Jl lItH JlI.M tIl'S'E" .
l\CJ 6C10 .el.HlI00 IIC/O .jal ....MAIn t C, • .I.-Al.Aft( ....,
600 .:lJHflNUEDU :s~y I-"MSIl(I ei9Y .I....etSIfCCI.GJ.NO).ANP.(J••r.MQ'.ALAft27CI-'O.~'·~(••J.
5.. CUHIiNlIE110 6111 .·1 ....00 601 1.11'ILAnICI ·lLAftc.....
601 nlHfIUta::llill 6"2 tIO00 602 1.1«.f1Aftlfl • .I.·ClAftC ••.IJ
602 COUTlrou£c............. D.SPLAY ItO NDDEL ..URITl:C6.(tC/4I
80. f'C1f</tArux.251illl'fltl TO 8'flft,AY ItO tIODELt.Il£AIlC:S•.,,,,,IFC~k.LE.olOO ro 805URI'&:C6.60n
60.1 f'(lf~Mf(JXtI'U.2OH tiEMICDI ... IfOa1.U'CALL llSUt'ftC9IlIIAflUX " ..,.MNlll.llI.tIO.tlO...I:ALL cr.:uf'''C9IlHItrtcIX •••9 ••..,U.l0.11(1."•• 4'C:,. L IJ!,VI'ftC9IlttAflUX CIo,.Cl.AlIl .1...HO.HO. U
L~••••••a.... rL~~ARILY STORE Ok.G'~ STS''',. ••••••••••••••••••••,ao:s URIJ~CJ2.R£C.2IHS.HI.t«.
URIJ[CJ2.R£C-3ICCAC.I.I ..' HS•• II•••HS.URIUU:!.Rl:I:".' CCIlC 11.1.110 ". 10 .....N!'»URll"CJ2.~~C·SICCCC ••••.I t.HSI.I.·I.I«l'
c SIIlRE ItO flOllfl.•NTO Fll.£ .:.'0 .
•
..\l
...... ,Con ,..
'4 .cv'
-, ...• ,' - ,

.'" ." .
•
•
........C7'
••2 C'lIlCTt..lEIUf·:toUlStlInll CFII.E,,'a-I· .fIa1SSa'.lIl£CT' .-.n,-'02
••IINI '.IunRCA" ClIII.RO:..U ccvcr .. t.lhl....I.m;hlJ...w.:'MAlI CllI"klC.2' CCICllCII.I ..hIJ'I.llShll ••• tlUKrAll CIIII.Rl'C.U ccnll....h '.I6'.II...IIUIllAl' C1111 .Rt:C:···lS' ce"'IAIClI ' .1....hNSh U.I.II!':'l'A11 Ir.",,,/l CHJt,",.rkllC V .. 1C',V.IO.Jt:'.. tl5.ufo
C902
(;
C
(;r;
C
c
CM.t tmtlrfl C101ftlfklX IClCI.llo.XlhIO.llhNS.4'""'15l: .,I.IlillU at o'GI<IN MflCl''-UARC:!''''X FI-1:A1.l Il!'oWfll caIAlhI4.F.10••hllS.41f'M& 10nlAkc I ,.·/lAfreIX AI/jO'.·.1Ak(2',.-'.-I:AI L In.lII'ft ca_.la.AMAr.IO.IIS.IIS••,Rr"PI.12.Rl:c-aIORloo.II.X.IlbX12-IIflUlCl ·119
c......... ASSiGN atl:IUlfflllU CUllST""f. rllll IIf:AI)It.llT 1lI:AIlnf .~ IItI IP I-ioN::
IllI 10 ......119ALC .... I·,.ll"'TCI'
10 C:UlH UIII£Wlll'CI.. .,."
.,., rORM'C1x.20CINthanl .. ElCl£lI'UEOIJR 1~.20CI"'UwtliT£f6.9)
" FOIll'IAfClX.2'IlII 11£1...,... CQ8STMff.,roM I. ~IlClIHllE'IIIi'III.B.M..IO ......uIII" 11:(6.11'
U "~llA" U.ICIH _I&If TO atAIIIlI::TJII£AD C5... kJ(If' Ckk.lE.o, l1li .0 30WITE C6.JI
.1 FooM' CU.I7M:llfllt .. WllU£llHlI£AD C5••1 HALeJ ...; .......h 'c........ ~1 QIlAII.E.IIT IIEAIICH ..
;SO CIlI.l IIOWUTICJ'IIIlnL C4.U C.I
• FORnAT CIX.5HCUSi••EIS.6'C·...:.l Ilt1m<APCAl.l Ilf:IIRCllCt:.I.JlOCUS1.IlOGIlU.S'IIlUTL ClUf.II£r;..u CCVCII.J..hl....I.ll:lhU•••IIS'
IIiUTar ClUT.II£C.Z. CtlIlUIoUhU:::I.RllhU.j,.f,WilE CllIT.II£C-4. CCFCII.Uh IIS•• II••••nIIRHE ClIlTt/ll£C-:SJ CCAflAlClI I I.IC!. I.15'CAlL USWFfI CICtKNA'~IX V 1.IO.V.I••IIS 6'
CAlL wc.TCAl.l lJMIf"lIC1C1MN1lktX W •• lo.wa••o ••I""...
WITEC4.'IlJ4'to4 FIlIlM'CllC.24H11MlT TO culCn.... KMlOIt'
1Il:API5. tlkkIICkk.o' .01110 TO 'ICl$lIIt.n C4.Ha,FIlIlIlAT UX,44l111.1lH III .'lIf'I.Af rHE MlRIW.'~ E'ClDIW.CJORlilTJRt:AP C~... ItSIF CkS.I.E.O' IlQ TO 903
C
r;c
CC
c
MRlfr.C20.~·I'HO••I.~.I"'.zrROIIIlnl'.C~Ct.R£Co2'CCMMUCU.IJ•• I lIOh...I.tIO.lIRI n:C;!(I.R£t.;U CC.,MI CII.I.U .1 1 •• 1.·1.110.IIIlI lEC;!Ct.REL'41 CCa.MI CII. I.U .1 1••,. J 1.I.tIO'
U ..... lill Tn 1aI1l£.2 AHt> o,SSl1;ff EIIlIHIIALUn: FlIK IlU BYIUDI ........lIIlI J1.C6.lItt41
604 fOll/IAHU.19IUIII.Jt.H llCllUI:t:O ClIiPrll CICIUlWllll£ Il:iSIClMlfHT.I1Uflt.I:AI L /IItlll::!
C f'HI'1I IIt'Slknl .'AIlTlAl. EIIlI.lM:nllR ~!llllf':[tn .IIIlI1CI6.61>51
6V$ I MMrc 1l:.4-Ut:lHCK llCSIIl1'D rloIlflAl. ElIlI',lf\'U:lIl1l A:::••..,III·"".1-1
6tt9 ':RJl£14.1I04I,1606 f1m/IA; llll. J.l1*: 1l1l:HVt:f. fOK V. I;!I
llfAIH:S·'I CVII/:t.c 1 ••'hV« I 1.1.1.,."UIAI'Slll"I,III.l.f.ZfKlIIUI' fllloCtQ11(/ 607 ""1111
Vll($C 1.... II.VlIII601 II.tHIHIlE
....11160lf JeJII
IflJ.I.E.HI.II11I1 fb 409C......... I:Al.l'UI jill; AIm 811lf'1.AY IIIU.AL -':98 .
00 61lo 1-I.Ht'I11(1 610 "'1.tlOIlIl.JI·WJl ..JI
610 l:tlHUHlIF.CAl.L lIHV~·IO.HO.IO.AMAT ••D8T.~A••tR)1·AlJ'"'..E 5tAll 11S1It"/lI7IN1 UN\lI.I.AMAf.10.1IO.1IO.4)CAll \ItlI1.FTC_f .VIlf:II.lIlhlllhllP.IO.IO••• IO••auWIUTEC6.61I'
ioU FOOIIArlllC.49111SE THE FCIlLOIIIII8 V MfRIX .....lIn•• MllJ-.nR.,.1:I9ft ItrIlOCl\£R IIHIDC V ME l:tlllPU:lC'CHARIII_oIHI rIAL OlIOCHARI~I-'ES9 fOR VI'I:AlL /m!lF/lCOWh20.lhlo.ItO.IIO.4'C............ ASRIUII INITIAL EIOEMV££TOk eut9S .C'A1L 1llI00J11Ia20kfAD ClU.R£C.U MS....IIO•••t.zntfIRfAD CIU.RCC·2' CCACII ••J,.I I.WS) ••I.I ...,REAP crU.R£C·J' CC.CII ••J' I.III) ••••I.II9'READC IU.R£C..41 I CCf II.u,.•; •.".)......"","MISE "URurC6.Bllo,
BIO FIIft/IAIlllC• .1lf1nc£ f'lIl.lOll•••S ItO IlIIIIEl. AFTOI 1IQIIE3'r; eML 11!iW'/l'2I1A..a.A.10.II9.Il1IoUC CAll 11!>1If/lC2IIIl..2 ••• IO.IIS.llifUC !'MISE .,C C-.l U!~ftl2HCI.a.c.,p.IIO.IIS.4'
IICl 10 ,..../lISIU-2''',1lfiN H.I:I;£SS- '.IItEr; f' .It£Cl..:NlZ
I.UNIT·UIIRlAP CIU.R£C"ll lRF.CJI.lI"C.U
10 . r.llHrlHlIEf'AlI!>l eIlU .:1;' r·l.tlllWRI1F.C6.Rllll.lRl:CI,.ll"CI'
Bil Fl1RMT CllC~"•.,,".DA.12. JX.5fIIl"M ... '6.J• .1X.:lHIIWk.F'6• .1,
,----~

___ -. .....P"__~......,-.......,."r___'f\".... ""•..", ....-;\
c: CAU. 1I'.lPl,.IIY (ltS.lI:IltIJ903 LOH1IHUE
C LAI.L l~" UCIlIlIMfUX xX...CI.n••••" ..n ....C:JIfoRC 1 '.' IlAtlf M'C'UAlH:!,··TklX Fl'!;AI L USIIF" (L'lII\lh I4.F••••"IoHS.4,C:IUlRe I '··M'f<t. 1tI1II'.'AlL EllJk..-(AIlAf .WJ.IO.2.lIE.O.Z.ICl•.,.~.IERJ
C CAl.1. IlSlll:VelllI.Aft-llk/lIl.8.IIE,O.IfS••• 4JCUAk(~)··l'l·
(,AI.L USIIF" (C1V"hI2.A1I11 •• ICl.HS.HS.... • •t::........ I>I'I'£IID ZEMIS TO fU/l1MD: MtlelX AlII' lCrllllft 10 1IIl.8UIAt COL
IIU ICtI 1-I.HfDO 0'01 ol"Nfltl.ORIIlOFe I •.J)·n.lIA.rlOl
REAlIl.l~·.RIL-4'((Ill 110 IJJ. ' I.N' It1I• .,N:lJRE/llIlJ~.Rrr·51ll~(fl.IJ, HS,.II·I."O,RlA/lIJ:!.R£r·A)(lFlll.IJ'.I I.IfS'.II·••N.JCAlL llSlIFlfl5l..··WT.S.F.10.ttl.ItS....c........ CUIFUIE Q'~ """UX " & "liN .IXI IlJJ I-low.;00 lOJ ...·IoNSHlI.J)~FI.(1I'oHO)
IF(I.FO.JIHlI.J'-FLOIIT(.JJrl J .I.E.lll"HU.J,-eU••n
7C>:J COtIf lillIE('All. lINV:'f" (H.ItS.lo.nltN••PD..,III:MEA••ou
C f'AlISE IJC t::AlL llSIIl'IfI:sHl1'tNl.s.nrtlV.lo.IIS.Nlh4Jc ~1\l.L 1JSl.'l·Hl ....lftIo2.n••O.ICS.NS.4Jc........ .FDRH STSIEn ~ F MTRIX ...
CAl~ ~~rtIH.Il.IlS.NS.IIS.IO.IO.~T.IO.I£kJ
C.AI L Vtll'.fF<AI/I\ ••HIIN.m.NS.mI.I•••0.111.111" .0. 'OU~AlL \'IIlAn·(H •••ICS.ItS.nl ••0 ••O M ••O.IOUCAl.L Yf1I~rnc.1l1KV.HU.US.HS.10 eLM..... IUUCAl.l Vlfl~rr IF ."II~Joln.US.Nlh 10••••IlKIlT••O.IElUIlO IU8 1-I.tllJIO 1I4(l .I-I.NS.LAIIl JoJI-_Tu'on
8411 I:UlITJIIlIEc......... lllSl1..II' xrllfcllF.D s,snn .W1U1El6.1I0U
1101 1"(If<IfMUl:.:JC>H Vlstt TO DISPUlY TILDA InnnT)RrAlIlll."""JI·U,,,.I.E.lJII·,o TO BClZWR[JCI6.1Cl4J
104 rtm/u.rll~.:''OI1 SYSTEIt IFlIrdlI:D D., It."1)C '·Am,. IS
tAll 1~lIrlfllH4 TllllA.1.AlM.ICt.NS.tIS.UI:AI.I. 1r.;:KlllJHll TllM.7.81Nh .0.t:S.HJ .4.r/\Usc 14C/IU 1r.'lII"lll1lll: f II.DA. ,.CI.M••O.NO.KS... ,LAl.L I/~;I.""l "IF TIl DII. I.ltIlAhlo.ln .1tS. u
c; uuu..... I'ART J 1I11t1 TlI£ !lTS1£ft .ItO:! (lfl '('~ 1-1.llll
DO }(,5 J~ t • "'·UAl /\1111 ( 1•.11 ~AlNt l 10 oU1Ft I II/fI.llT ./I!;'/lfl fI) H:::JAI /\II~J l 1 •.II ..t4l.An( 1"I"••n
•
101 L"lINIJIlIJr.C rlllJSl: 1 IC LAlL 11SVl""( .0IlFM'f'f:1MJI1 ••O.F••O.NI...100.4'
rlllL \.,...rr fF.VOIIN••,.ORIOlJ.ORIIlO.IO. JO.AlIo\T. 10. IOUtill /02 I- ••InIJP lO;! o'...IIkIIll'rU ••II-I;lIII" 10.1)
10:.' tOlIlWllE"AlJSl: 12I:AlL IlSl/I"ltUoHr XFURtlE r.lo.ltl ....IlO.4tliM I T" J~.Rrr:..4' ({Fe U.I.U .1 1.(J((IOUh n.l.ttU
c: CAl.l 1~·nl:.....1.2.F.l0••n.llItlllO.4'c m:IRlf.\'E 1IRllil'/I\L STllTEn MTII • ITIlR£ F .
6Y9 Rr~Pl:J~.RCt.:.!INS.HI.NO
Il£A/lI;C::.Rr(~:n((0\( 11.1.1.. 1....1..15..n •••IlSJe;.':J IrUII«I.1I1.N!1l1lO TO 824
III Nll:.'( 1 ••U·AI.All( 1 • .11110.024 IrcU.IIII.QT."~U.NID.(J.IlO.aT.Jr.u.80TD If1':$
AlAII:':l( ,.J'.AI Aft'" till.. "'t.'lIJlOS CIltlflUIIC
C "AII!;C ..0C CI>IL IlSWn( ~""'TlLl21.I.IllMI2.IO.I:O. 12 ...C 1:Ai.1. lr.;ll'l·"I,""UL2:.!ltl.AlN!."'2.10.12. 12 ...
ml IlJA 1~I.ttn
"'1 /1'6 .... I.ltlBlAnU 1••II.Ill""U.,,,Irt I l/aloLE.IfS'lN..M2r I.JJ-lIl.NI( 1t1m• .I.
106 CllUTlHIIEDO , .., I-'.HOIIlI.I 101 ""IoHlteLNlI l 1 ••II.eLAIt( I ••nn l .HNiI.I.£.It:aeL~u.JJ-a.AlUI.Jllan
107 L1IHUKllEIJlI 108 I-I.NIIX' IlJ8 .l-3 101Q• TlLlU.JI-AIIAJU.JJIF(J'Ni,.I.E.N9)FTIL2(I.J)~T(l.~IIOJ
~ L'lIHUNlIEc........ Tkl\H!lNJ$E 1llNI.."2 • -AI....12 TO ~I. 0IISIJtV0t DY1WCICSII.U lEl6.1I72 UlS.Jf(l
822 r~KATlI~.JHUS••12.:JX.~.12JflC~-rro'NQIlO ,,,., I •••NQPO 109 ...·I.HUeSN A1t12U .J'--1ll1llf12U .,1)
10., CClIfTlIlII£C i'A'JS£ ,l-e CAI.L 1~;4It'H(i!:I-'" A1U21.8.IlLM1?••CI.lflhl/llt3.4)r; .0Al.L USVF"'lI/I\LU;';;2•• 7.AI.Nt22••o.wn.Ift1IlS.4)
tAl.L ff<AHllJ (1lL1llf22,llOn.t«I8S'CN l TRIoHlII (IlLAIIJ2.IfO.HltlllU
C f'A11SlS: 17C .:AlL 1~·"(9H-AI.IllfI2.,..".MMI2••0.1COIl$.llIh4Jt ".M.l IISloltfflflf/I\LM22T1.8.IlLM:l2••0.1Q1oS.1fOn.4'
Ifum.lE.If(,aIUIlO TO 83. •In.'·.
\
............,, 1
\
i

\
,\.
•
,
1-
1'\.
i
........C10
C,_,> 4•. ,
................
-..>~-----'--"'-.~"'--~----
c
IUT·;;:~'llllfJRlAD(lut.REC..tCCF(II.I.J).I~J...).II·I••IJIrc1FU'.~.u.1084JDO ll.19 NOXDO 839 NOIISI.C 1...I OAreo.
lI39 CfIHIlIflIEDO 840 1·1.1lllIlO 84<: .J-I.HSl(IIRIII •.JI~(I ...)
840 l:OUTlNU£I;(J TO 846
841 PO 842 I-I.NOXPO 844' .-,.•• HtlBSI.U ••II-FU • .l.
.4Z C(lHflHllf846 ClIHfll«lE
f.lDSEUlIll I.IUT. STATUS-'IlEU")CAll TlUoUSlCL.IIt1Il.1$1PAI/SiJ: 19,nT-O
LA/I ,1ll\oT"(2Hl.l.:.!.L.10.IlS.taIX.4Ic............. 1:lIltnlTE It ..~r.AIl(3:! • R£C-:.!)I.'S. In .'10HllDS..tr.i· '''ICAll YItIILFnF nl2.L.IU .1IOII3.1IO.10.10.AJI,\I.10. JOUIlO IU '-IoHIIll' /13 .r·..""
It IS Rl't'tlE/iE"IEu Il' FUllFlll1 (I ........lIll( 1 • .JlfAHATU • .l'
ltJ l:ll'U IN!'-
r.AI l. \IIIUIrr U .•A1.AflI2.NOas.W.IlIJIY.o.IO.10.AltAf.10.JUU00 '14 1-lolGllllllIItI /14 -"'1,JIIIBS .COilS I 1 • .I'~AI.IoIt."2' , • .II-_IU• .I)
114 el""1HUEc........... '~.-rurl 0 .,:4\1." VI1la.rf CEOBS.l.lllllo!i.I«IDS.I:{!. 10. to.Alf:>I. 10. ItlU1:Al1 vnt.....rn .AlAftll.lI'Illtll.....HII.IO.IO.IotAtt;!;;'.IO.lflUbO liS 1-I.Nll~
DO liS '-"1.111'C 0 IS RCI"Rt::lI.HTE» ay AI.ItII.."':t
AI Aft;>:.! I 1."'-111 AIUI C1o•.l)-Al.AI12;;,n • .JltItHATU •.I'71S C:llIH IIltlE
c........... tON'tIlE a-nlM ..C:AI.1. \lflll... '·Cl ....NIl.t«J8S.W.HI.10. to.","T.10.1[8)DO 716 I.C.NlIIISIll. /16 .",IoHI
C AlMT "'E'-RI:SE'HS T-anl.l'"AHAr (I ••u~...Aft;!( 1 • .JI-AltAln • .J1
/16 C'JIlflHdE:c.......... DISPLAY R.8,£•• fa ••••••••••••••••••••l;Al.l USUF"('fHIlAIRIX £109.EI/tIS.10.UlJIIS,HlIItS.4)
cc(;
.-
CAlL USUF"C9H~I2Tl.9.ALANI2.IO.IDtS.IO.4)1111ITE(A. 833'Ntl»S
B;.t.S rClRMTUX.2IHYOlI "'1&' SUEeT ...IClhI2.42H WfPUlS V," - .--- nIrlED "IE U1JsEilt'EIfJ .... - --
11111 n·(6.IIJ...834 tOllIlArltX.4:snTHE 0l1l1'll11i1 CORR£$PUKll TO CUltMNS .IC -M.MI2H1l:t7 "'lllI:16.lIlS.II3:S rOkIlAfltx.60H$£lI:CIED COlUllll$ "ILL rlllM A fIAllflll fHAl fIlISf .. IIllIt
UNlllJl.AA.N.34llEHn:R DlITPtnS TO tE U".o£D UtlTEllERUllHoIl(5•• , (RRI I' .1.1.1«11191/)U 1136 ...·10 HtlllS00 1136 ••I.HUISAIIAT I 1• .l ••MAIII2C •• Jl.RU••
";'06 COlIC lillIECAll lI!illl'/lIMI/I IlODI.6.AltAT.IO.II08S.l:Pltlh ...I£kn(JCALL UHIr..!rCAlV.T.IIOIS.10.M. (IlOT.IIl;AIlF.A.(ERIIF Illn.£o.I~~IUU TO 837HlJX-N(l/lSllO TUU4S
1131 HIIX-W110 ,,;SO (wloI«IISDlI illS .l"I.HlIAllAH 1,."nAlAII1~(1 ••11
ll.18 ClJIUINlJE8'~; LON UIlIIEC SWl:E 111."""'2 • IotAln2 AS A I a N!D t:W.IU fin .
un HI: I 2l>. RlT.-I 1"",r.:,.NlIX.llllf1S••ooT.l£Jlt.IIlIt TEI2l>, m:r;~2H I lot Aft:.o~( II.I.U .I.l-l.urlllSl .11-l.Ultlr.UIIl1I1F' 2l>,Rl:r.·;1l I IA/IIoTI I .. I.U • 1.1"1.IIIIXI.1I-1 ••/1I11:UC...... A,i:;WN Elllt:lNAl.lI£S AIlP ElliUll,'[UlIR$ FIIlt lIr.;Jlt\,'£R .I:Ullo"t:lIlUll·,UT,IlTATIJO';'··IXE." III(J IllS '-I.1IIi.'-11211Ll.Ol;[ tlJlllT-JI
81:> I'DiH IIllJEIIlIt 1[1,\./101
710 rllr<KArOx.2011I"h3~A:~II" £IIll"JlVALIIlS FOIl Ol'.lI:RvtJhlOllHl1:/'J.l tllllJE2W1,I1U6. II II
III HlRllltr OX, lSOItt h3Jlf AS-IUM E'OU''''':Clfft FOIl ",....n:RW8. (4(1",1:.'\Il 1111111.-.11I1t1 II: It,. 7.1:'.)
US I"ORIlATOll,;l.lllUWH TO IlF.lIlJl:E' &Alit f'Olt OIlIlUI,'[R·'.k1:AIl(5•• II\KII'IKK.I.£.O'OO 10 /.u1:A1.l tlllll£(o
131> 1:01« I HU£c ••••••• R£TkA/~~ A1Aft2: • -AlAniZ • XPOSE F nt Btl L ••••••••••
HfIX-IIkIt;j'-HtIIlS/llI /12 1-I.HlII'SIllI 112 .J~I.HOX
AlAftI:!( ••.II--Al.MI2( ...11112 CII/HIHIIE
I:Al.t. TkNm IIAI AH:!2. HS.ICS'(:All. TRAHSI (AI.AftI2. HOltll.HO,UI'AIISE IIII:Al.l USUf"(7HAlAIU:l •• 7.A1AflI~.JO.JClIX.....4)CAl.l (J'..lllF/lC 1HAl.M221. 7.AlNQ2.IO.IlOtll.HOIIS.4)
,:\

..\
\
,
1•
..•
....
.."1,1".:,- .." ,_ ....,... ,. ,,,'.
cIICl 72S I... IRlIlfDO 12'5 JooNIlfl.IRlIlfHCI • .II..-lWlfCO'If'CI.CA•.II"el •.II~'fl'
ns t1lNUHUE00 1':!.6 Ift..NtIllS110 1:'6 .... a.NSLH • .Il w -t.CI • .I1
126. COlfUlftlE
CALL VHUlFFfL.M.HDIS O.IO.FfIL•• IO.JER)110 121 1-I.Nt...DO 72., ,lnl ••HC.tH&.JI·FTlllfl.~)
127 C:IIHTUIUE.·AUSE 21C (~At.l IISIlFHe2Hll102.M.fO.lldllhlltlllh41'c C~L uswr"C5HftIHYI.~.nl~•• o.IRDU.lkDlf.4)c........ XfORK AHA, IT Nrlf M .
CAlL ~~FFfMIHY.AHAT.IROV.IRlIlf.IRUU.IO••O.F'ILI ••CI.lfR)':AI.L IIlllSl,.. CF'TlLl.'hIMtlf.IRlIlf.IRlllhIO. 10.IlH4T••0.1£1t.c........ CIlEATF. NEil I-tlATRIX FOIt TaTM. BTr.IEII .~ADCJ2.R£c·4Ie(.CII.IJI.I.,.I.MII.II·I.HS'
DO 7211 1.a.MlIlS
DO r .... ....".LCI • .II ..-t.CI • .I1
128 COIUJIfI/ECAt.L IIttlI.U"fl ....1of..NO..h ...... I •• IO.f TILl. lelolO)DCI 129 I· J • NOIlSbel 729 ....10111.e IfNS••ll.FlILlf ....)
129 UlUTlHU£C....... CImSTIcUCT NEIl C··MAnIX Fr. TOTAL STS1£1l ..
~AIl(32.REC·~I f ece 11.1.1).1".••NS•• 11.1.NO'DO IJIJ 1-1.1mDO 1;10 -'-Iflf!h Ildllfcu.JI-nClAfCo.
130 CutfUHllEPAUSE 2~
CAI.L ~"e5HAHA'1.5.AHAT.IO.IRlIlf.IRPU.4)
LAI.L flllllf'eAHAT.IRCliI.10.2.lIE"lChZ.10.UICIIRI:".IER)CAt.1 IIM.;II( lClllF.lll.:Jell"UI£.IO.lf£'IJ.IRtoll••• 41':ALL llSUCllc 100001II£MlECTR.10.Z. to.lROlf.IRtlll.41ca....... STIlRE Mr." llTBTnl IofIAT•••C:.H!•• MI.lll1 ...
• lIRITEf:''O.f<l.C·. URllII.NhNO.IDCiT.ltRCIWITI C20,Rl:I:"JI CCIIIr. Uhl...... Il' .. U ... tlr.eIlUWHEe:!O.Rf(;·.)((CfU. 1./101.1.' .'RfIlfI.Il"I.HOIJUr·IRIlWt20H1I'·OUlltln.tUT...11 Cft·CtJRIlHT· .An;EliC" 'IlJIl£CT' .Rl""Cl w"'21lII<IU.C JUr.CU·I:&!ill(IofIAHU.IJh 1.t-••• II~IlfI. U·l.I~1lf1
, •••••••• FMrER lNJllALCOKPITIDHS IlKP XfORn TO F'ItlJl 11101 •••••••lfRlllC6.7.!I •
1:'1 FI~ltAretx••:lt1 EIIIER IHnIM. CCltlllHIIlH'~ nlR llr.m,Ho'ol Illlllu.IR£APC$•• lC\IIlC 10. h 1-1.1lS1
DC. 1l5;' '·JtHrIllS111' lIS':!. .I"hllSFUll (I. JI ..-n11lV1 It.....)
I '.... ' \
if"( J.ClT •Ir.;11111 TO 121If'CJ.n'.lllC Idftllll-t UlAtl I I
nl (;OlIHHllr
lZCJ ~'~1 1-I.HOBSIlU 7:!1 J:'eltHOLO .JI.-LCIo.lI
1.JU I::t. J-J.JfdXlDC' 122 .l~HSU. '''''IV""/VC J ••/)-rUIAJCClIif' ({.ER •.!' n'IfIIII.JI-n.lJAHU
1Zl 1:lllITrHtA:1.11 n. 1-1,1«,115...0 1:!4 J-l,Ht.nllflle TtHf; ••Il ... u • .I1
n4 1:U1U IItllE
CAl.L USUIIC9HltATRIX RI.t.nILJ .ICI••I.MO.nrAIISE' ::0CAI.l USllFIIC9HIlATR1X Oht./lt.Nl..12.ICI.tftlBS.HO.nLAtl IISllFnClllHltATRIX Tal.ICI.AHI\T.1ChOOllS.HI.n
u...... CllNSTRtlCT TOTIlI. $TSTEtI MTRIX AnUIA ..HS-OOIlSfNOI~Atl VIllU.·UllAlhFLA'hcrs.NI.MS.IClolO.IlH4T.IIJ.IUU00 719 1-.,«9PO 718 ....1o.lSAllAH' • .lI-_rc1 • .llfAl.llllC 1••11
718 I:OlfHNIlEC CALI. Ellll<f'eAH:tT••lS.IO.2.UEIO.Z.ICI.UlUlRf:A.IER)c: .:AtL IlSWClle 1lJtCF.lllE1lVALUE .IO.UEIO.HS.I.41
CAt.L VIllUFIJlLM.FTJI.:l.HS.I:IoNOIIS.IO.IIJ.FTJU .IO.IRI00 119 1-10«9111' 11'1 .I~lollll"
AlIAre I • .lfllSlftFTlLle1 ••11119 LUllTIIllIE
Illl no 1-10'Ill"SDO 7:10 J-IoNf'1ISAllAH I filS. JfKS)-E08Se ...11
72t1 .•:llNTlUU£
DO 117 1-1 ••lll"S00 717 ..JooJolfSAHATCI.,lS•.lI-FlOATeO)
117 CtlllTUllJf:IRW-w.:.HllIlSI~ClI·' ATU.DA TO'.;HAkCZ)·-lAt •
C I:AI.l IlSIlTIICC:HI.lh 13.AHAT.IO.IRDlI.IROII.41C n:l.l Elc",Rf"CAlfAT.IRlIII.IO.2.UEIO.Z.10.UI::.REA.IDUc: CAI.l .ISULVClllHEIIIEIIVAl.II£. lo.lIno.lIS. IonC......... C:U.'GT~1lCT XfDRtl TO OCT X•If CODI',JIltlATt:s •••cC fIRST nClDJFT L TO DECl~ T.t-LII)C
cc """ Clltl~;rRII(;T ". 'HIIEKSI'C
cC· l'lIIlSr""";1 n
,\
\
\... \ .
852 l:llHTlIlU£1:A1.1. YttI..FHFTllI.W....IlS.IlS... IO.IO.V.IO.IEJUIlII lJ2 l-hNIIII91If1IItHlhll-\HlC lINCh II-VCl. I I
lJ~ 1:IIHJlHlJF.WIlEC".1331
;,33 Flof'IIIlTCU.SIH lISt THI: FlIl.LOlIl1I8 I"ITIM. e:tJHIIlTlOIftJ IN n ... RO:fC:AI. L lISIIFII(5HXCOH .5.W. 10.IIlIJII.""C......... IllI TI~ Rr.Sf~ •••••••••••••••••••••••••••"',111:16,4&;1)
4103 FClRlIIlrcU:.25H11ltlH TO IlII 1l1lC RE"flt'QIISI:TIRl~AIl(::Io "ICKIFClUI.'.E.OIIlO TO 464CAU. Il{lllE4
464 WRllEI"./J411044 "IJRlIIlrc IX.4C1ft11IS1t TO RE"A881011 CMoU:RlI£R MIl If:r MIIlI...,.
R£ADCS.""kIrCKK.GT.OIIlO 10 ,t?C...... R£6Jr~E IKITIAL 8YBTFM IHrO •••••••••••••••••••••••RF.ADCJ2.REC-2)HS.HI,HPRF.ADCJ2,REt-JI«ACI.J).J-I.MSI.I·I.MSIRF.AD C32 •Rl:C:-4 ) «» (I, JI.J-I.NI I.1·1 .MSIRHulC J2.R£(;wSI C(C( 1 ••11 .J-I.IlSI. I-I.NOIWRIJF.C20.R£C-IIH$.HI.NU,IPGT.ZERO"'UIE(2Cr.Rf.C-2) «Ol( IoJ"J<o••HSh 1·I.tlSlWRIl£C20.REr.~JI(C8(I.JI.JaI.HII.I·I,HSI
WRIIE(20.R£C-4)C(C(I,J).JaI,HSI.I·I.HPIIIF. rtJRHEND . • . _ .
C••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••C•••••••••••••••••••••••••••••••••••••••••••••••••••••, ••••••••••••
t:lllIRllt.trIIf£ JRItlWICA.IH.IHIilEAl. AI10.IIIhlllUO •• 01110 10 I~•• IH00 10 ...~I.IHAJC,J,lI-ltCh..!1
10 I:UHUHUE• 00:10 InhI"
00 20 ~'.1,1"
ACIo.l)wArCIoJI20 1:00 (JHUE. -".WIlII
l.HIIc•••e••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••C••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
IiIIEcRC!lllllf£ IIAI:'IIlIF.nIR IICUOUIlIAL WC 10,111) .LRIIR(IC 101 .UClkllClOI .WSC 10.101 .~'IlCS(,".101
1.AlI·Hil [C 10.IO'.R£U 1(>, 10,.Ill."HAllC 10.101 .EfCllllf"C 11r.10I.2111:!C UhlllloBlM:.'C UhIO).RC 10. III h 1IIlR(10.lhIHl.( 10.101J."r(JO.j(l).Vf.I(JO.II.11F8Tnr(JO.II.WClf'(10.II.AlAft~~CI0.10I
""AI u!to. I(J) ,IIC U.. 10' , 1I111'1(J0. I'" .fC 111.101 .ltllAH lb., 0'
twAl. XXI 111.101.111'.(211) .EC:''(I) .XI2(» ,1.k1:C III' , •.• rit JIII.II,JI JOIR1·Al. BlllC2U.201.BIll.WC :lU.20) .III'PWI 4..01k'l~Al. AC I O.IOJ.B( I I',I(» ,1:1 ,".llt) ,iIl_CAC IJ,,)(~IIHffiIN/Ii,(!>/A.",':.Zf.RlIoIDliT.H!;.Nl.HlI(~(otIItllN/AlIlJ/r.101[(•• /E16'I.I":£ .LIlVf·AAHo( /Ilr</GI~UtttlClH/\Il:C/IIA.".>:. 11.10 II. XX. V.IIIW
(:otItIIIH/R(I/OR'U.hW.I1FS.VIlI:8.8LIlI'2.l.kU,..tIoLU.~h"'.M2'.!.2-1IkW()· ....ruooIU~ICI"
Ir(A~CLI"CrPII.6T.~IICMf'LX-I
C•••••••••••••••• CRrATE LAftBDA-P J •••••••••••••••••••IlIt 10 I w hl21'0 .0 ...... '2IlEJ.C I.J)·Fl.OA'ce"IrU .F....II REe.( IoJI-utEUPI
u••:c.IHUHUEC CAl.'. 1Jl....ltc.l'tREL .:S.IlEL.IOol:l.':I.41C•••••••••••••••• CRrAIE LAltDDA-2 •••••••••••••••••••••••
DO :10 ' 12lItt 20 .to 2Al..I'HAIU I ••lIyIllAlt22C' .JI
20 CooJlHIllEC CAI.I. USIlFIt C6fftlLPHIlR. 6 .Al..f'tMlh.0.17.12.4IC•••••••••••••••• REL-Al~ •••••••••••••••••••••
DCt 40 1·..12PO 40 J~"12
EIGDlrCI.J)-REL(I.JI-AlPHAR(,.JI40 (~CllfnHUf
C LAC.L (Ifi....nc 6HE.C1DI...,.EIIlIlIF.10. 12. 12.41C PAlISE'40'
.FClUIl-...X.IIE.UOO TO 34C............. CREATE Llntl ••••••••••••••••••••
IlO 11 1·.012DCl7IJa..U'HI.C .. ..!lnFLMrC.,IF( ••FR.J)INLCI.JI-LJftCJQI
71 ';C1NJlHlJF.C............. CREAIE .16 .110 12 1-"'2DO 12 .'~"J2.18Cl.JI-EIBPIFCI.JI.18CI.12....I·-IhLCJ.JIIIO(I.J.121-lnLCI.JI.1~CI.12.JtI21e£IB8IFCI.J)
12 COHrIt:ClIE .1:l2-2U2CAC.L LINv-6C.IChI22.2O••1811lV.11l81 .....I •• JDUIttI lJ •• 2PO 7J 12A1.f'ttItlU I.J'nBIUIlNf I.JI1... ( 1 ••I'-Il,.UIIVC IoJtl21
14 ClI.HIHIIEUO Til ;t.->C........... IAKr IHYERS£ or EIGPIF •••••••••••••
34 (~lltInHlIE
CAlL 1.IHV:IF([llIPIF.I:<,.lO.ACJ'W••h IDGI.1lKAkC4. nil IC ''RE'''.I BY IIJ2 .
J:> LtlHHHlI£00 41 .....HIl110 41 .to.. I2~'12C I ••n-VO(,.JfHllI
41 COOrIHU£C I'AlJM"4I' ....
No
.~ 1"j ". ~
r·1
It~I
,'-~~

'T'!. -,
-----'-------......_-_....--......- ....._--- ----.__.,---- ,-._>" ,-_•. '•.. -... -'.'_._~~.._,
C
I'
N....
..'.
Rf,AL A(IO,IO.,.(lo.101,C(lG;IGT,lRQRUlIO).LiORCcI6.CotlMlN.fSY8.fA,.,C'Z[RO,I~IT,HS.N'.HOCOHtW~/VEt'VA.£,X,IIJ.II.XX,V,VIHV
C;otII1OtURO.fOR{OIIoVCI. WS,\Ill£B ,1tI..AJt:l. LRllllChLlOlW.1II. Nl:.!2(;otlfIUtl.'£rcU"I.-r..LlH"P.(dUAt '
c ~ CAI;I'CIU\ft: 1IC1lIM V IN FUlL S"l'f;lEII i .'.At.l. VIoC.
C CAI.1. m:wrH(JlIVFIl,J.WIi.10,HS.NS,41C t~Al.1. USI/t·..(4HVIJES.4,IIDES.10,HS.NS....c•••••~~!~ CIttr.'II..AT~ I:08T FUHCTII»f ••••••••••••••••••••••••••••••
.IsOS JsJU
'-010 Is"l
CJrF.HPuIWS(1 ,J.-VIlESU ,.1''''2CJ'I~.I'ftlf· ....( I ,JItC"U'CAllSCLJ"UII.LE.lfldl. 60 TO 20CJ-C..HI;J'"'HP.At U .oa':J'C:J+c Vt"B( I ,.If1I-I/llESU,.HII ...2.2tAl( I ,"U'IF (J .'IE.MSI GU TO 10.'uoJlI
20 .FCl.HE.NS. GO TO 10IFIJ.Hl:.NSI GIl TO SRETl'RH
. EMil
ci•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••:C•••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
t.',llflllll fIHE RllliRhDIIHI:Cl£R IIluunRrAl. I,u:a (10.1111 ,IoII!:;!( 10.10••ItIn:JC 1"'I(:I.~'l:RtrUC.. II.PWICli'"
IVAIIXI CII>. I I.VA/'X21 10. I J,1I£ fA'U 10.11 ,llTIoR' 1... 11,~~11CICI.ICI)••£rAI(10•• J.ZErAI(10,1 •• RRCI0,1 ••acl(III.I.;J.l<llC II>, I' .lIlte 10, II.,IC 10,10),1llUO.II>I"~A1. 1I0C 111.10•• '.R'IkCJC 101.LlORII( 101 , \/t..:: I 10.101 .VI)[3C II>, 10'
I .t.U1fAl C10.101 .RU,( 10.101,III.,P1fARC 10.1111 .£IUDln Ill.I(>.,:v1~(I(>.10),8LAK2(10,10••RC10.IOI.~IRCIO.I).IIlLCIO.101~."II'O.IOI.VII.(10,1.,WSTnP(10,II.VfS1P(10.1)
I:CAI /II. (10,101,':1,(10••01.IItCC 10,2(» ,PLCC 1(>,20) .nt.C:( 1(>,20.Rl·At. STAIU2(>.201.Ilt.UO.20),Rl.Uo.201RlAl. 1/( 10, 10' ,V( 10, IO),VIlNUO••0IlFuo.io) .A1t.\f( 11>,101ilEAl. XXI 10.101.VA(20),U2(>. ,X(20) ,tRE( 1(>',1. r"( 10) .\/.U 10)Rl-A1.AUO, 10), II( IO.IO),CUO.IOI.I/t:M£AUJCI)ReAL IIIU(20.201 ••IilJlIl1C2(>.20) ,1/I(1I10C46(» ,A1.1lIlC"2( lilt 10.LDl1IUllusrS/,\I •• C:, ZEI/O. 1I1l",'15,111.':0':lW'.:ullU'I!tl'"A.f!IL,Nl.,IIt.C;PLC.IlLC:llTM,..... Jtt.':lJtIJ1llH/ItlIX.fllllXI.ItlIX2,""XJLOlll1llll/AlIII/F. AIfA I/EIU/lRr.I.IIVPIIIUIll,'iJR/OCOIl:1lIH/IIE':/vA.E. x .1I.hU, xx. v. VIWt~'IHHI"I/RlI/lIRIUlJ.VO.W8,VDES,IIl.AIt2.LIlORfI,LI0Rll,1lLAIt:!2
J:.'sllRIlIII-1lSIfl;.Ali-OIll' 100 I-I.NSIJ(J 1(1(> J~JrI:I
C( 1 ••11 .....I.lIATCO..00 I:UI'rJHlIF.
IlsOJlO II-Uti
CC
l'~.L USUf'..C7InHVER!lE.l,ALPlWhI0.f2,f2....CAll vtlULFt·CVI:.!.Itl_P1fltlhlf$••2••2.1(1, 10.R1:l.I(I••n,
C C'AU$£'kJ:VC f>CISttU. f BY 8LNl2 ..
f:Al.1. IItlCII..Ft·CREf.,III.AIt2.MS, .2.HI.IO, 10.ItU11ftR.I(I, IEkJC "ACJ~'M AIl:J'C•••••••••••• rl~r~•. f 81' F •••••••••••••••••••••
f:Al_1. V~n.fnltC PIfIoR.F ,tIf;.HI .MS. 10. lChRrI.. 1(1. IlrRJC rAI~f""
C•••••••••••••AV RCstll..T 10 VI ••••••••••••••••••11(1 50 luhNS .00 50 J~I.1lS
RII • .11:1....:1.11 .JJfVCIC1•.1'
50 I:ON' lillIEC PUST rKILTlPI.Y 8T ASSI6HE... UtlOtllECTCIR ..
DO 60 IEhNSVORCI.ll s VII.IP'
60 I:UHfINUEt:AC.t lJS""HC3HVCIfc.;J.\IIlf(.UhHS.I.4.t:AC L t1SIIf'HClHlh hR.IO.H9.HlhoUt:ALI. VHln.fFCR.VCI'hHS.Hlh 1.10.10.Wlil.... IO••ER.11(1 70 l .. l.HSVFSI J. IOlsVFllTltPlhU
10 1~I1HUE
lfCIC~~X.hF..I' Ut' TO IIIC••••••••••• C'RfrK'.T BY VI2 ••••••••••••••••••••••••
CAt.1. VlltlLffCVl2. 1"".HS.12,12.IO.10.REt ,10, IER.C•••••••••••••• POSTHlA.• 81' BLhN2 ••••••••••••••••••. rAI L VHlII ffIRf:I..81M:l.NS. 12,HhI0.ICI.A1.PHItI,IO"F.R.C•••••••••••••••• P1ISTHlII..T 8T F ••••••••••••••••••••
CAt.1. V"IIt,FfCAtPIfAI.F.W.HI.tlS.IO.ICI.H" 10.IERJC•••••••••••••• n~U1EElGEHVECTDRS••••••••••••••
DO flO IsloNSVOIII.II·VII.IO.I.
flO 1:1lK rJ NIlEC°At.1. VKIII..f"f"CHI.VCU .NS.MS.I, 10. 10,WBT/lI",10. UR'DO YO IshNSVfSCI.IUIsVfS(I.JUI-VFBT...(I.I'
90 CONTINllE -CALI. VKlJt.ffCR.VOI.NS.MS.I, .0.ICI.WBTtlP, 10, IER.C~Al,L VIlIll.F1 IHI ,VCJfc.HlhH9. I ,ICI, 10.WB1P,10, IER.DII 1111 1.IoH&VFSCI.IOtll-WBT...(ItIHIIF81PU•••
110 ':UIHJllllEla-lUll
111 CUHrJNllEICKf'I.X-OIF 011,'.1 .Nfll 00 TO •RfrLJRHENII
C .C••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••
Sllfdwun HE ll'lClIST If:J'IHTfc.f:I~ lIRIllIIRt:At. XXC 10,101.IIAI :.'III.[(:.!III ,l!(:l0),"LkCUOI.I.I"f101 ,IIJ( 101REAL WC 10.IC'1 .V( 1(•• ll'I.VIHVUII. IO),At.( 10.IOloAl.AIt22( 10.10.REAl. VFf;( 10.101 ,VDESC 10, 101. BLAIClC ICI.I(l1 ,VCI( 1l.. IOI
\

\, '. \ -"
.+'.
"'.~~ ..~ ,·~,,,·~~~,m:
10-01:lO IU-IUU
III-IUf2OIr(A~S(LI"(lot••UT.ZERO'OO TO 34ReAP( 11I.R£C-3. (C...C....Ih I."I ••1-I.NStm:AP( IlI.IlEC-4. CCftLC 1 • .1 1."1•• I-I.,n.1111 TIl J5
J4 Iti-m;f/IINI;:-:.o.NINS;:-NS.2lUS-/mllIIfAD( II/.REr.-3. CUII.CC I ••n IS), 1-••NS.I:f.APC 11/.IlEC-•• CCPLCC 1 • .1 llIt.I-••NStIll:AP( II/.MC-:;) C(IltCC 1 • .1 IS•• 1-••':1'Ill.AI'( 111.IIEC-6. (CllI. (1 • .1 1."12•• 1-I.UStRLA/I( IU.REC-1) «Rt. (1 • .1 HI2•• I-I.HS.
.I:S I:CWHHl..:c rAU!;E 'I'f l('
/:ALL PfXCII.IU.IFI.ACUC PAllS["'flli'
LAI.L I'III'ClhICnC C·Al/(ll,.'I'III"
IrlAIIti(LIIIUUU.U.ZERUUIO TO .~
In.AlI2~1
IrLAr.'-11:"'lI CUlIUNIIE
C CAl (:lILIITE IlLf>HAIl .t •••••••••••••••• CReATE lAftPDA-U I •••••••••••••••••••
P(I 1(. 1-101200 10 .1'"10 12RO (1 •.Il~'·U"'H(.)
IFCl.F.II • .I1 REt ( .. .I.-/.REClUI• 1> COIHIHlIE
c UuU I:REATL I.AHBDA-2 .1)0 :!O 1~1.1;'>
[10 ;:0 .,,.1.12AL..'ltAR( I .J)IIIAl.AI12~'C I.~J)
20 COIHIHlIv.C'"UU''''''''' Rf:L"hU"lI<R ..
Il[I "" 1.·1.12'"l ,,<t .'-1.12[IVlIlf( C••I)-~lL(1 ••I)-Ill.MINce It.ll
"(' I:lIN 11 NUE".·(I 'lIl1.Hl·.U litl ru 134
c u I:IlEM'; LlU .1111 "II 1,.1012li(. /I .'''1012IH'.( 1••Il-n.lIAHOIIFC 1 •.,.lI ••UIHI.( 1••I)-I.Inu'n
11 I;IlIUINUF.cu.uu n •• ':REATF. BIO ..
DO l'l 1-1012DO r2 ':sl, 12II1IH 1••ll n ElllPlfU • .I1"W( 1..2 ••I)--II''(.C I ••,jIllli( 10.1112)-1111. CI ••UDIC(lfI2 • .I'121-EI00IfCI • .I1
12 CUHTlHI/E12:':-2.12CALL LINV2f·CJ.U.I22.20••10INY.IPDT.UkJI8.IER.00 1:.1 1-1.12PO ")3 ...·SOI2ALI'IIAIcC 1,.II-.IOINYC 1 • .1.lilt.( I.,/I·'.IOCI •.In2.
73 C;CHUN/IE110 TO U4C........... TAKE I~ OF £IODIF •••••••••••••
U4 COHUIlIIECAl.L LlW:lfC£IUDIF.12••0.M.rHAR.UICII.lIt'.AR£A.IER.
C•••••••••• FR£tRRLT .Y 11.2 ••••••••••••••••••••••••IU CCllHIHlIE
DO 41 I-I.NS00 41 ....1>12111:;:( I ,,/I-IIOer • .IfllS•
41 tOllllHlIEC'AlL WltlLrf'CII12.AlJ'fIAR~HS.12.12.IO.10.kEI. .IO.I£R.
e "USTlIUI.T BY BLfW&> ..C:Al L IIKlII.FnR£L.Ill.AII2.tIS.12."1.ICl.10,Al.'HNh.I>.IER.t............. ~.L1JLATE PETAR •••••••••••••••••••••••••••••••••/)\1 IJO 1-I,NtIPWRE( r. I t ..lllllU U.ICU
lJCl I:UNHllIl£CAI.•• 1I1~1l'.fF(F.MIPRf ofU •lIS••••1>.11>.IIACIX,.II>.ll:Rt110 IJ5 1-I.tISIIOIH I , U hiler .ICII
.;15 I:ClHUHlIECAI.•• Wolll.rfCU,I/fJ.hHI.t:S.I.ICl.IO.IIAl.X2.II>.IERt00 140 l-l.NSIIITAR( 1.1 1..IIAl'XI CI. I HIlItl/X2( 1.1 I
140 LOUfJNllF.C uu. CAlClRLAT£ ZETAR .
00 145 I-JaUS00 14S .I-IoHSlIuer.J)-I/(ICI • .I1
...5 fONn'lllE
. . LAI.•• WlUL""(lIlJ .1'III:RE.,n.llS.I,ICl,II>, ZEIAR.ll>.ICRIt................. CMLCI••Al£ RR ••••••••••••••••••••••••••••••••CAI.', 1I'111l...·ClIl.PIfttR••ETi.'hllll,':l.I,ICl.....IIHlII'I.1".I£RII~ '50 Iwl.N~ • .Rk(I.'I-ZErAk l l.llfIlHlIX1CI•••
ISO ClIIf0 NIlE,,.nrLACll.t1E.J) (lI' tit 167
t ':Al.I:tll.A"f£ AU'/I(.I .t ••••••••••• FRE"'•. ' BY 1112 ••••••••••••••••••••••••
I:AII. 11"'11.1"'(1112,1111. .HS,12.17..ICl.ICl.REL. ,".IC.<Ict f'CIS1"'".T 8Y BLI\Il2 .
':Al.1. III1IR.l'f(RF.I.• BI.IIII~!,HS.12.HI,10.10. Al.PIIltI.ll>.lF.NIC................. 1:/ILI:IRLhJE ~rlAI •••••••••••••••••••••••••••
llO 1~i:;.I~·l .IlU"11111 (1.1I~AlIX' U .llIfJ I
lliS .:O/U IN/IF.I~AI.'. IItlln.fl'Cl' .t>vfIl.,U ,KS.l.10. 'O,IIHl'XI. 10. II:Rt011 1111> l-l.NSWIU, U-IIU.IIIIJ I
•
....NN
.'

160 r.UHTI tft/ELIlLI. IIIll..rrcW.VlIJ .HI .NS.l.IO.IO.VAlIX2.ICJ. JDUDU 16:'i I-ioNSKrAI (I .U-llAUX. CI.I HllAUX2U.U
1<I.:'i (:IIHTlHUEC............. CUIll'urE ZErAI ••••••••••••••••••••••••••••(:AI.I IIHIII.FI'(II•••PVUI.HS.NS.I.IO.IO.l£TAI.IO. JER~
c I:AI.I:I..ArE QU ..1:A1.L IIHlIlfFCIlLPlliU .BETAI .HfI,HI.1010.IO.IlCI.IC,.IEH~
u CAI.tULArE 11K ..I:AI.1. VHlIlFf (1lL1'lfAlh BET/lJ ,1Cll.NI,1.10, 10,ClR, 10. IER~DII 1/(1 1-I,H9URU, I ~nlETfdU, I H(!R(ltU
1/0 I:UH rx HIIEC..." ..... !:EE Ir TIllS IS Sf:CIIHIl litE TlIROlJlil' FOR CIIIlPU;X ....
JHJI'I.A112.HE.U 00 TO 168'6" .IJ-JII1>0 TO 169
1611 JJ-1U1l169 LIJIHJNIIE
C I:UIt'lJrE GRAllIF.HT FOfC IlE"IlL CASE .IP-O
115 1l'-IPH1:( II ••I.II-II( u.J..I~HWS(lh IP~-lIDEll(IP.IIU~"RR(IP.I~
U2.AL UP.IUUIf(JI'.Nf..H!U GIl T(~ l:r.sif"( IFI.MIl.NE,unu TI~ 20;1
e (;Ul1PlIrE ORAIlIEHT FOR tlll1PU'X CASE .IP-O
IUU u'-Iru1;( I r•.1.11-111 II •.J.n-(WSClr.IU~·IIDESCIP.Ull ~"rnu IP.I ~
I .2iAI. (II>. 'W) H( (WIll Ir, Ill. I ~ -I/IlESUP.IRU ~ Jtciilii if;i)2t11l1( 11'.1 ~ Ia;!.AI.( JP. JIlt!))
U'UP,Hl':.w,a no Til 1110C 1:Hl:CK IF mil: 1$ FlRfJ1 UHF. TllROll6l1 .
IFUrt.AIl2.1I£,U 110 10 201rr lAC,:l~()
IltJ IIJ~ I-'.N'..<~U ill=" .1"10 ItS'lUX' (I ••n"ItUX2( 1 ••11
lU5 CJHrrNUE[0(1 lYI' InloNIOft .~'(t .I:.~i .H!:
00"'";0-000:';o t·;;0 i~
Co ',1C: )/J,-; .. '--. ' ..~~ I·.-..to ~,"
-:: .,:;j.
..,:"
.1'\
•,\
rf~\rli\~l: ~
1I11 ••II-/olll:JU .J~JYO rOHHNllE
1:0 m I:.!:'i:101 LUHrUIIJl:
1O-IUII20:S LUIHINIII'
IFUU.u ,W-lIOn TO 1:~0
UIlJ.l:r.rUllilI rn 110CALI. IlllIIllRlfClU .HS~
RlWllNlUll
....NW I
111
~ •. " ,.~ ..<..•__..~,.•",--,-_ •. , ... _.... _.' _.. -......,_.....~'.... _ ..•...•.-.... ~ ".~_.< "- .••.,"~...

ORIGINAL PP/?2 t:~
OF POOR QUALnY
• .,r aLa 7t. k . Ii; ',S, 4 . 444 ;; iin,
Uk a.i bib aU~:'.J+E:.:En••; JilFJ: ii, \:
'1;jI
124'
APPENDIX 8: DESIGN SESSION EXAMPLE
~************t**************************************** ****************~********************* spF.:r.nu"l. ASSXIlNMf.N'r P/I(;I\{\UF ********************EN n·:r< l)n:XRr:J) H(mE IW IlPER/,rxllN, tllll"I:"(I, 1,:Z, , , , ,91
, 1
************U**********U HOOE 111)A'rA Et:'mV **********.***************
iI
/i
P'<(;;VWIIS VAl.tlES't., 1mi- .,
la· :.! tm", 4 ] J)lrr... H Zt:lW= ,(1(1(1(1(1(11 (1(IO(l(l.WIl.i1f TO eI-lANUI:'!'
? (IHII'mXX II I
1 :.! :~ 4 3i. 7
",1540(1(11:-1'(1(1 , 154(1(1(11-:HI! -', 4~!(I(I(I(I~:-(I:,' ,O(I(I(I(I(I~:to(l - ,144(l(l(l~: H!(I",;I;!OOOOr '(11 . , 0(10(1(1(11:" t (l(1
:.! ··.9'>'(,00(1" -1·(1(1 -.117(1(1(1l-:t(l(l -. 29~i(l(l(11-:'-(1;1 • :$Hl.(I(I(lF. - (I i • :~()(I(I(I(lF. -(li,(1000001: HJII • O(lO(I()OI:"HI(I
;1 • 249(1(I(lFHI(I - • :;~'OO(I(II-: Hl1 - • HI(I(I(I(l1:Hli • O(l(I(I(IOF. too • ;I;I)'oo(lF. t(lO".11 2000C I OJ ,(lO(l(l(lOI-:+(I(I
" • ()(/(IO(I(I~: I (1(1 , (lOO(l(l(l~:+OO , i 0(1(1001: t(ll , (l(I(I(I(lOF. t (l(l ,O(l(l()(I(I~:too,(loC/ooar ('C/O • (1(1(1(1(1(IEHI(I
5 , O()o(l(1\I1: -t. (1(1 :O(l(l(lO(lF. to(l • ()(I(I(lO(l~: t(l(1 ,()O(lO()(IF. +0(1 -, ;!(lO(l()(IF. tcl~!,(I(}(}(I()Or 1,00 • (I(IOO(I(I~:+00
" • (lOO(l(I(lI~ I (10 • O(l(l(l(l(lF. H!O .0(l(l(l(l(lF.t(l(l • (l(l(l(l(l(IF. t(l(l • (/(1(1(1(1(11: HI(I-. :.!~;()(I(lOll'O:'! • (1(1(1(1(1(1£ to(l
., , 5(1(1(1(1(11: I (1(1 ,O(I(I(I(I(lE t(l(1 ,()(I(I(I(I(II: t (1(1 • O(l(l(l(lOE HI(: • O(){:(H)OE fOO,()(IOO(lO(; I 00 -. f,O(I(I(I(lI~too
WISH ru eHANClF.'!'
l1
. IJ(
II!,
..

-)
\
J125
1
• O(l('(I(I(lF. 1'(1(1.l
I1/ff1UX a I
il,;I:\t'II""IL1R_,-,:,IL..IC,".£',:~II~II_~!IkI."'fSII4l111id11l1'''61111!1,.4£-:':~,_.JIllllj(l(IIIt«"': .14"'p'SIlZ..""tllll;:."tII!I.J$lII!IIillll,Ill'.n...~3Illtt.;;I;;IS••as..4.i.4.$.U!lll2$1215.2124111l~lIIdl.."}"I~!II.~I,,.,]:••U.,;I:1,,'.LJ.~.;t
t 'f, ~fr..,II'I ;,...,;:,.,f ;,t., ( ~
t I
f ~
".,\
• (l()('('(I(,~: t('(1 ,('(I(lO(l(lF. +(1(1
• OOOOOOl: f (1(, ,OOO('('(I~: +(1(1
• (I(I(l(,(,OF. +0(1
( <
, ('o,.'(I('(I~: HH,
/
1 • ('('(1(1('0" Ill()
IHUlI lO CUIIIW~:'f1 (I
I1I1JIUX I: I16
• ('0('(1(1(11:': t(lO
2., :s
1 • t 0(1(1 (I(lF. H't• 000000[,10(1
• O(l(lO('(,F. HW-.1 OO(IOOF.. to 1
, ('('('(I('(l~: +0(1 ,O(,(I(I(lO~: HI(I •• (I(I(I(I(lOf. HI(I
• (10('(1(1(11:': f ('(I• ooooooe f-(l(l
• 00(1(1(101:: f (1('• oooooor:. HI (I
• (I(I(lO('O~: +(1(,.(10(100(11:+(1(1
• 1ll0(l(l(l~:HI1.0000(l(lF.+(I(I
.1(I('(I(l0F.+01
, (lO(l(I(lOF.. (1(1
• O(lOO(l(lF. HI(I
• (I('()(i(l(IF. HI('
, ('(I(I(l(l(l~: t(lO
, (I(I(I(I(I(lF. +(1(1
.. • (J(J(J{J(J(JL:: ,·(,e, ,Oel(l('('('~:f('(' ,(le,(,e,OOF. tOO ,1 (1('('0(1[ Hll ,e'O(l(HIO~:t(lO• (JOO.,; Joe 1'(10 • (lOO(l(l(lE tOO
WISIf 'fl' (:HIIIWF.'f1 (I
WXSU 'W "XU I'ROI1 'fHiS MODF."r 1.
*************************** f:xnXlm H()))~ 1 *************************Tf.IU1JNAn: nns IWtl on Sl:':I.fo:t:r N,:xr MOOF..1
,.,
-.1 rn(>ll'·,o.(
·i
.:a44HU:+C10
• 6~~~'J()YI: .. () j
1 2
" 1
, ;Jt~;J(J:HI:HI(I - .119(J(J:~"+(J(J
• J ~'9:~40F.··0~! • ('(100001: t(l(l
~! ,j, 1164.11~'(I(I ,;J(IY(,7U-H)(1.55:t ~lO;U:,,·OJ\ ,(I(I(lOel(ll~ to(l
;J -'. 1O;S;S~!7"HH -, ~'tl'lY:)~!"HI(I• 4(.M.~~~!t: -(11 , (I(I(looell:" f (1('
<I - .:.!;!~9(1Y" 1·('(' ,H:,",16:.!7F.+(l(J
". JIl{.(.b 11: .'(I~! ,O(JOOOOE HI(J
t::NfI;l~ I)I:SXI~I:':I) 11111)1: 01" O~'t;:R/IUot~, 11(0)t;::(I,j .~! .... ,91, 9
WIIN'r '(lJ l~tmm NfW IIlUIHl~1I1 F.lllENVF.(:'WkH'f1 ('
V HllrlUXI
/ **********************************************************~******************************u Sf·"r;mIlL IISSWIII1':la P(\l;t;(~IiI: u******************
},~
\;:.,:,l'I~
fI.
•

ORIGINJ-\L F'ik;,;: mOF POOR QUALi ,y
."•
......J•.~.IJ.)....iU.;;:IJ,i.a.'........i._'ILliliIl!"lS""":;.2IIIS.2"01l1_l1li[.,.;;I\II.I.Ii.ae.k.o.a.b.a.iJII2$.&''¥>''''.IJ••21.4.1~}~(.~;a•..•2~.8 .j 2tj
'1J.,
126 !!
(
'/
:, • UU(IIlUIlt-. t ou • 00(11l(11l~. HIll • (1(IUOOIlI.I·\I(1 • UO\l\l(l\l~_HIO • 1 (l(l(l(l(l~. tlll• OO(l(l(l(l~:Hl(1 .00000(11:: t(I(I
I. • ()(}(I(I(I(lI: .. (1(1 • ()(I(I(I(I(IF. t(1(I • (l(l(l(l(l(ll: ',00 • (I(I(I(I(I(I/:: t(l(l • (1(1(1(1(1(11::+0(1.1(l(I(I(IOI:Wl .0(1000(11:HI(I
7 .1t.ll.~·97F.·"(I:~ -. :t :S()~1:).l": t<J(J • ?27~~~61: "Oi • 279(i(l(il': t(1(I - ....:';',·4;MF.-(l:S". :"6;~"!S~il:-(14 • 1(100(1(11:HI1
WISH ru 1:llItNll!; I-:NY VAl.IJFS IW V'f1 (I
HL/tH:1 :.! :4 4 :'.
" ")
1 ".0019(11 E··(l1 .1 ~'694Elr-:+(11 • (1(1(1(1(1(11: +(1(1 • (I(I(I(I(I(I/::HI(I • O(l(l(lO(I~: -1-(1(1• (I(I(I(I(IOJ: {- (10 • (1(1(10001:HI(I
2 .•• 126'i'4t1~:+(11 -. a£l19(IU:-(l1 • (1(I(I(I(lO~:" 0(1 • (I(I(I(I(I(I~:HI(I .000OO(l/::+0(l.0(10(1001: HI(I • (1(1(IO(lOF.+(10
:~ .0000001:+0(1 • (lO(I(l(l(lF.+ (1(1 -.1(1f1:~o1:'ir.+Ol • (IOO(I(I(IF. +(1(1 .00000(11:HI(l• O(lO(I(IO~: i· (1(1 • (I(I(lO(I(lF. +(1(1
4 • OOO()OO':too • (l(l(l(lOOfHI(I .000(1001:+(10 -. 91"4a~'E';(l2 • OOO(l(I(IF.HI(I.0(1(1(1(101:'t(l(l • O(l(IO(lO~:HI(I
!'i • OOOO(loF.HI(I • (l(l(lO(lO~:HI(I • (1(I(I(I(I(lF. t(l(l • (l(I(I(I(I(I~:HIO - • ~!OO(l(l(11:+(12.000(1(101:HIO • (1(100(1(11: +0(1
<> .0000(101:+(1(1 • (l(l(IOO(I~:HI(I • (1000001:+00 • O(IO(lOOE t(10 .000000Eto(l". 250(1(1(11, ...o~! • (IOO(I(I(IF.+00
., • 000(1(l0F. +(10 • (l(l(lO(loF. too • (1(l(l(I(IOI: H/O • (10(10001: to(1 • (1(1(1(1(101: to(l.0()(l0(10r....00 ••• 50000(11:+(1(1
WIlJlf '10 11 HlPl./tY fW MOl)I:!. 'r i.1 1 :\.
.'
•I
R(::I)UCI::I) mWI:R HII/.lf.I. j
. i
l'IAlIUXIA: .1
2 J 4 I"!
1 - .f1Ul ~'(IU:"'01 .1~!('94&EHll .000000/: /-(10 • (l(100001: 1·00 ~/t
~ .. • A~!(,94f1t:HI1 -.H:~A9(11E"·01 • O(I(lO(l(IF.: to(1 • (1(1(1 (I (I(JF. HI(I
.4 • (I 0(1(1(1 (II::HI(I .OO(l(l(l(lF.tOO - .1(IH~i·1!'i£t<ll .0(10(10(11: j-(I(I
4 • 0000001rH10 • (l(l(I(IO(I/:: +(10 • (1(1(1(1(101: 1(1(1 ••••) 1(.·Hl~·E" "(I;,!1'1/tl'fUX 0:
1 2
". J.s~(~':s:;.a:',01 -.J6014o10F.-(IJ
:~ • loA 0·..2:U: i·O(1 • 7:~29(19/:-(ll
:j ". ~''l?~1 ~..: f'(J(> -. ;:anw:,,: /(l(l,;
4 ". U,'I/S;lf,f (1(1 ". j ~-;21f/;'F. f()()11/imxx I"'..
J :2 ;s 4
• JIH 1S H: 1(1(1 .;H~!4~·11: "01 •• 15~"~4.',E/'(10 -.~;.t :~~~,:nr .. (,:.~
~' ...,"1<
"~:~

•
ORIGINAl P,:'.~~1 ;~~OF. POOR Qv':'tTfy
• 127
•.1
" ••I:O;Y"~;·E too
" ·,.:!:!!S\'UYf:UI(1 .(f~·Y,,;nf:f(lu -,.f/.I;·!SU~fu1 .;'t~.<!'in"01................... RI:nUl;n) lIlml:R l:rm:'Nltl.m: M:~tli/ll~I:llra *ii...................... I1I1Pf; 21F.Wn:VAI.lIf; A:alrl>I:MrlH .....U ..
I'I<CV lIlllli VAL "':t~.,, (I
LItl1llI)A 11RLAL" ,U(IOU(J(IE f(1(1 IMn.. , O(lOU(I(II: t (1(1
WU:1l rc, LIIA'tC"'r, 1eN rr~l~ IfI:W VAL lit:Ui>
, .... tr. t.~
LitHllIIA :: lI<CliL. - • 1:<;O(IOOE f(Ut:1:xr I: IV':tIVAL Ill: II"'(&:VIUU:; VAl.lII:tW
, (I
L ..tUlltA .11«Cltt.- .UOOOOO&:+oo XHltO..
, It'Jcll"
' .....
WH.1l lO t:IIANlil:", I
eN (l'R IfI:W VAL llf:Ui), "2 J
LIt'UH,1t 4 weltl.- - ,;!O(I(I(IUI:to1 ..I1An.. -. 1(1(1(1(1(11: f (11lollW ru l:Xl( f~lll1 nUll "OIlF.1'
, 1
u 8.... f..>:rnllll HOI)!::.! .f..IHI.'t m:HlIll:ll PAlHXItl. f:xm:UVI;efllR ie!,SWlmnH'~IVlNV!:!;W'< v 1
, 20 0 6 J (I (J (I (I
CXV!:Nv"e rrm v J, (I <I \) (I ;!(J (I -IJ -4
UUI: rill' rOl.l,lILlltm v H(.rtHY. fUR WUlI,t A~::tli/lH':lfrkCtICMLJI:"I( LItHell v ItRI:" I:OMPI.I:Xtil (( JAt. liUt::i~ rUl~ v I
1 :l :I "
•1
,;U.I','''H.fOO
..
4 .1IHl(IYI.CfOJ -.2(JJ/~;·f.'+,,0 .1'lf,nl/l:l(li ".:~()(I(I(I\lI:I,'V.............U,u... I1ClI)f; JIt:llifl:VI:C'W~ (.SSXClI:l1l:1U .UU.....u~
.......... f.,:n:R OR (:IIMW.. f:XUI:NVf:C'fIlRSI
'.
I'RlVIUU~ VI-lI.UI:~·', (I
C WI:III.'I:I: rllli v .tl Wl"(ll.)• (I(J()(I(,(.,: HI(I
,O(I(I(I(lllf: f 0(1• O('(I(I(I(IF. f (1(1• O(J("'(I(I~: +(10
( tHAt;)• O(JU(JUlJI: I uo, (lV(I(I('(l1; I (ll'
• (I(JOI'(lllf. IV(l• ("'(1(1(1(1': I(IV

....~
,;
128ORIGINAL PAGE isOF POOR QUALITY
I;t;- ..----.-.-" _.,._.__ _.__ ,.-- ~,~, .. '.M·.······· ·H' .••• -- ~ ••~.-••,.- - ••_. " _._, •..•. _" · __,__0_'--- ._ .f: •t~t;
•
1<,
. , 1CNr[R A IIl:W Ol:~HRED V.:r.WR I
, ""." 1.. \'1. 'A..11 19.4 4:: ... ;, ..../ 1I,l1l -.:·(llfl:tI"I'''':X VI)1
• (1(101: HI;!• 1 0(1(1.: t (I::
ItCTUAL VEnUR I
..• ; ."000"tell• ;"'/(10(1" HI1
.1~4(IO(I/:I(I:.!
- • :.!1I1t0(1IJF. 1(1(1.If!1t000( HIl
• ''If:.!2J:U: HI:.!.1'/"1.'.11:: to;'
Vol<kOk '.'rt WI( 1
.1;!I09.VotOl• .Il:lIo6ltf,HJl
.1 Ulll 61: +o;!•• ff31:·O~'f:-c.;:
.4,:t.46.:UI(l ·.~~;H(I·/U:Hll
-. 41J~~:V~:t<l(l •• :~4M.liU:to(l1.IWUrH lit' rHr m~:URrn 1.'1:1; rtmLrtlOTll til' nt~' I"IW.lt:c'rt::n V)o:nlll~.
I.r,lll rll III" nil; [RI(lll~ v"e;nll~ •lt~ rur t:tmllR I'I;C;.: .... rA»l EY, ;ClIll:"vn:ruR V:.!l (REid.)
• 4lf}(10(I/: t(l:.!-. U700(,/:tOl
• 124000/:+0:.!• 1I1 tl(lO(Il~ Hit
-. Jlf l!,':/:lt. HI(I- .1·I'M2U( +uti~~. (J~,s~1 (j
r.1.9U.:1I ....::. 8:~~;/~~~
<1ttftll)*.69600(11:Hll·.1940(1(11: to::- .J4YO(lOt:: 1(11
• :lOllO(I(It:: +00
•• Yo;/'/" .I~· +00
....:xr CUll:',Vl:e: runeI::lllf:HVl:L1or, v Jl en.:,,,.)
• O(lOOOOE HI(I• (l0('(1(10" t (I".0(10(10(11: t (10.000(1(101:+00
( H1f\ll)• OOO(l(I(II:+ (1(1.0(1(1(1(1(11: to(1• (1(1(1(1(1(11: +00• O(JOO(lOL. 0(1
"1~1I ru I:IIAH(W", 1CIHI:I~ A IICW 1)1:~JI~rl\ v.:nUR ,
, ·.~06 .J." -.YlIl -.09} 4.1Y .O}OY 1.4' -.~
I:II""'.C)( VDI·1
". J(II,O(I(IF.. 00.' • Y}OO(IlII: -(11
AI:-rUAl lin; rell~ ,
•• Yll J(I(I(I( f(l0• /(1'(1(10(' 01
• 4 "'0001: f 0 J- • :'l(J(l(lO(It:: HI(I
• ! ""'0('1: HI'
". "1"~O:.:r:1(1(1• ~(I.";UI: 100
[RRl/r, WI: rllR I
•• j'(I0604f.' +00• t :l}.. 1Y.: Hili
• 41t.U/.(I': +(11
- • 4Y;I<> I,.; 10(1• 1.1'/9:';:11: t ('1,
.1
•• 4~'''01'1"-01-.69,!J:W': - (I:!
S.l~,'U~)','
:~. 1:~U'J~~ 1• """6J;!
Clt1ftn)- .;/HO(I(II: '(111., .'(100(11;'- (11
'. /(!Yooor 01• :'i~J()()Oul: t()~J
.. tU:: Wr::'Ulll:'/JAIA
• 41';'!~~l4~41 U/ ,·;·!"":'-(:2.~'~O?~3~ll~,'·'1'J~I:.ao
1
"
O([ALI-. ;1(110(1(1(11:.0(1•• '1t1.i 0(10.: +('(1
• "."'0(1('1: f 04.1 4V(I('0.: tlI ~
••••••••••r:llI! rmas (If' • t;:J~R,n'ttMl<lX ... I
• ! <ll!:!O:~I: t (1(1 -. 2H(I.IVI>.: HI<I•· ••100:'3:'C/o(l -.~;":H'f'\f..-(ll
U:r:cHll III' 1111: 1l1:!iWrlJ vn:lIlR"':rlli III OJ 0It.: PIW.'I:1.: n:r; "'1:(; 11m..t.f Ill; III ur rllr rlil(tII< Vt:l; W~ ..t~ rill: rl<l<Im 1>(;1;1:.. (1,.,,,,:,(
, iCiGI:,lVITfUll V 4'
"
..,- .,
,..,- •....'"~
~
"....r

.'
....'f"""~ '~$.',f.l" '~'H -, ,.,
m~IGINAt Pf./~:: :~
OF POOR Qlg,LlT'i
"
129
.. • (l,/(Il":V~:(I;!" .../::r HIt •• IIJ::'::M·/It~../It':-':I: -0::• ·.47JC'~:·/ :!~:. W.II."(l(l
&I~ !;H ((I I} I ~WI_M' tIf.. IIll,m:.l r.:rD f. IlII:/lVl:C wl~~n, (I
•••
.1 • I ~In 1!~~9 ~J 1~~:!:.'(:(''':. (J:~
• .. ::1 .. , '1.rf/H:~:J;~f;':~.: f "0
IJAW M:.f'UX "1I..
-,...
'...I..
• 1.J1·"'Cltu.Cl:m;~~;:1!'fell- • , ,·:.oJlf/;:;! ~Hl/IU.!~l:t III
-. ;IH,UCIA.IH~.I1AAVf: HIt.;C"IIYJ4IfMlioAlt:+(I:.!
ItA1RI X Alii. rt
'....
1
-...·.:U'l7~lJalll"'/lfHII
.:Uo1CI,U,H'.'J:: J.cy,t: +(1 1
·.J4~'lJC~O~"U~Y'f:t(l(l
.1:.!U1tl~.;"I,U4·/;n: tal
.1 .l~61 ..""l1t,{I""tI~6JtfCJ{'•• tc""'lf6;f~(I'fI:;al,'E tCl t
F.xnWIl tllI')"-.4 UUU ..\
II
I.i
.H11~',,..2':U:~yy/,r+()o
• .lJl'/OlEtOj
.. • :.oj 421H ;:CM,Sln~l..t: t U(I-. 4J<J:f.I:Sl '/~~~~tH·"~".:+0 I
UI~H ro 1::)(1 r fRUit rHIS HCI/)t;", ..•......................,..CI(. IN tit, C1H X t"l. ~
- ••CU6J06E to I -. ~fIOH:Ht:+\I i
•,f
-. (O:!"'(I"[ HI(I
.( U;U":.i(I(1
.. -.":!":!;!~r.+0(1 .A.f~t~:'''':+o(J -.ffS4IffOr,Hh -.:....1.":';1:+(1.1WitH r rt, I;IIH r Ufl,t; !ltr"RI:H~
, I
.................... 'W tUlj"HVEl: ruM tH ~C1vrH Hr ..W.;UiHrIHI; ';UHhr4Hrs
WItU;HfSI
..•,•
:t .f ..• &UO(III('.: tI, I • t<t(IO('Uf:+(, l • I(ICI('(IO+:H' i • H'('(I(IOI; +<1 1
.! • • (lO(I(I(IE +(, t • i (1000(1.;HH • W(lC'('(lt:+(I t • I VOUOO.: H' t
,f • H'(1l10(... +(11 • 1(1(1('('0" +0 1 • .1 (l0000( HI( • ('('(1('11.:;01
4 • , VIIIII'(1f HI' • 1l1(1(I('(,.:+(1.1 • .0(1('(11'•• te' i • (0('('0(1.; til tWl!>H rtI I;HII;/lif;'
J I "
I
• H'(I('('vl; - (Ji
130... t')'OHIG~NAL rr':'\.~·. ;
OF. POOl~ QUt~LlT'/
WISH ((I (:Hf.Hltt:r, (I
N(W rus r. • ,I(I~:!~:!t:HI"CUI;1 rUNr, I WH'" ••w~;,~~;!t:+(l"WlliH to LlItH "ll't: IHt: HrfIRI:WI
, i
Gkioll.I::IH S~:I,RI;H RlIlHlNf, HI: I S,:...R':11 t'"k"HL·n:ns.
EN IrR NI::W VioLlW!H, 1 i I~~ lE~ 1 I i(~ i~~ 1tl 1[7 1 i 1(1 1rl 1
COS 1" - , ;H .lYY.n. HI"GRiollU.IH H~:"'k';H kUIIOIII::, til:: I lit:f,kl:H f'f-lRItMt~n:nSI
(In "'UL I V"LU~!; I,kt: I• IIf l-TI:....S,N. 1 IHU' blll:,ll"
•
'.
-.,i'
,.'
, ./
lIEt'AUL r VHl.lIt:'-' 'Ikl: I• IIf !>ft't'!;, H- • Ii Ir.f' bll': ,ll" • ! OOO(I(I~ -(Il Iml,t'" , l(I(I(I(I('~·· (II'>
wum (II 1:IfAHhE'I, 1
, A~:~~(I(I(Jf.' '(11
,
"ND DMeN- • 6:l~(I(I(I~ ·(t2WI:IU-: I M·,nt
. i
"/ID DMltt- .62:)(1(10.:' (I::Wl"l~t: 1(1I\~'tl I
Afm 1)"IN- • 62:'i(l(t(IF.· (\:~Wl:m, l(d"t:N
f,NI:I DH(N.. • 6:.!~(I(I(IE -<t;::Wl:nt:: ,,.I\,(N
Atlli 1)111N.. • ":.!:,'O(I('(lt···(';!I,n:IU-: "'",F.:N
f.ltll) 1J11Hl" • jI,;!t'(I(I(lF.: (I:.!WI:'~t: (A"::N
Mlli O"W- • jI,;!:~(I(I(lt"-(l:,!"":'~:-: r"''''('l
Io/Il) lIl1 W·' ./._!tr,OUCH": 0::1.:1:1i:1:. (;;Mo,:
.roCiCIOCIOE-Oj
• 1;!t1ioY.(1: tOY1111 ( 1.I:I;n'rf:)),kl:mll:':1l WI
.4U,\Y;i:,;r.H'"'''l"( ACl:~:f> rt:uJI<I:IJIII;[ IJ W:
• .( I I.IO~I:: tOIftil., ...t:I:~:f' n:1J 1I<rlJIIU:U rill
• ~!y lIU." HII..M IjO~Et(lH
WHH f'1<1:S.:H r WU,IlU:N(HII ( ..l:l:t.... rElJ.'
• ;l~;~lltl~t: HIHflllr III:I;E" n:lJ J1<1:I;"CI::U ro I
.~·tl/:-;I1"t(lH
• ;'!Y~!tlH:I~+II"WHH Pl<flWNC W~"'Il(rH-r
Nil ( iol:I:~P (~:ll.'
• :!t1:.!tlY i F.+(I"• ~."~,. ,!H: to"
WI rH f''''.:Ht:/I ( Clk...1I1lN·CNil ( I.I:O:P I F.:1)1
• ;UI4:!'~: t(l".;.! IY~SUi".: fOff
WI rll "kfH~ttr 1lI,f,IJU:H-rtlllr ACl:Ft'rF.:lJI
• :.!/:U tIl': t(l", :.!J~.I,,;n:HI"
W! CIf f'li:rHrtH llr.:r.lllf.N·rfill r "l'l:~:" rt:,).!
.::bl.~"UrHJlf
• ~ ,'(I.UJ t:HI"IIHH f'Ii:F.:!;~:/lr llRf,IlU:H(till ( IIl:n:p rEII J
.:U,;I~'Ut:f(Jl-1
• ;!'!'Io4.I"f.' f(l"IolHH P"'f.!i"11r llkliOH:'HNIH Al:c:t:P r.:o.I
, :.!!\lllo I ;'t: +0"• ::.~ t :lY('F.: HI"
1.11 rll f'Rr!-:~:1I( Cjk(.IH~·tH
tll! r ,,1:rU'rnn.:.!:.H,"/EfO"• ~~~:'a~;~~~n" JOU
Ut (/-1 f'IU:~';~:/I" ll:lMltf.rUrill r Al:I:l:f'rF.ll J
Elf ru< Nt:W V"'l.ll~!ll
r lu .1 •u:-r.N1:W l:nSI'"l.f.SI !:IIH'SI"(P bIll-:"(1,' I:US r·~I ....'H sn:t>., It:... I; 1ZF:lnoW t:U~i I ..tMH srt:t·bro' !Hit:"."11 c;u~ r"141':11 l:u~r ..
l lOrE...Hu,s r !:I r~f'Ht:W 1:(lS rLAsr Sl~:'"
s r~... HUt.Nli.1I I:",nHr.w t:lllol-
:l S(O'HUdH Srfo...NI::W cosrHr.", I:OS rO'
2 1HI::"SI.AS r l:r(l::t'f'.:11 COSt.Hr.W COST-
2 liH'I'S1.IIS1 srt: ...Ilf.W COSTNI::I1 cosr-
:.! STEP!>u.s ( !HU'"1::11 LO:orIII::" COST-
:l S(Erl>I.I,IH .,n:.,Nt:" CO:.,Nfll LOS(-
~. S rt('~
'.A!H ~ (I,t',n:w ru:o r.Ilt:W co:> I -
:.! SnY~I.MH fln:"m:lI t.t;:> IU(lI l;U:;r.
:' srtr~
Lt;,,:;f ~ j. rt:p
.J
·..•• •,.../ --~
•.....r
I.

ORIGINAL PAG~ lSOF POOR QUALITY
+~'.. """ ._.~ ..... , ......,.. .~
F
............ ... ', ..... • • Of' •
/
1;)1
.~.:;
•Hl'U (;0:0 ,- • :.:r.(I:'::':~·n (mCUt~ r rUt,,;r IUU- t :l~~C::.!~~'~ toOUHIII 10 e:m r 1111)1': tin: Hr';kl;lf'f-THE SEAft~H IS CONTINUED AND A 'INAL COST 'UNCTION IS CALCULAT[D.~Ol<lIIlU:,H :,"Akl:lf klllHXt:l:,Hr. r :n,Akl:ll ~'M<Ill'trn:k!i1
[lUAUl, r '.'I;UW:l IiIU: I• III" fin-I'Il,II- to ~i'F.I' 1HZ.:,/)..
'CUt:l r",u.lJm,rlArK1X v I
• 4«266:i311 Y02:f~;t+O:!
• :1:\(JY:iO:'i9t ;s,c,:'o~,(II' HI(I
.1~!~!~:i367214"':l7f::Hll
.20J7J~'144YI14£+OO
, 1:U.411(I;f66;$9£1t1f'+(I:.!• J 274J1,c,:,7:"illHl4.1:+0(1
4 .19/ROltS010/0Yf::fOI-. 4YJ(01H(I.l4 i ~ lfll:HI(1
",.rRIX WS
- • "141 YU"'(J,JYYY76(+(1<1
• 11 jJooL fO(1
'" -.6/;::1~9f:·(li .6niff6;:J:I(I(I!lAtH HI ';llIH wm: l'F.Ht<l:H'!'
, (I
liAr II tlATIll X.I
'"
f. ~. i
!
.i~ICOO~4U14Y4AEf(l1
-. 1/~;J61.!milt J.J/I: f(I,
.! ••.if)~,3/9Ul;3Z036/f"+<I'••<i 1 'MOl" 1:1:';(1 t 'IL' u::
t/Hrk(X ItHMIi 2 .1
"\
j
.t ,,;;J,.,, .......~-W'
•,t"""",r
-.:':1 1I~;/~:Hti .;W:'i400rtOi
, - ./4:.!:<H6E+(I(1 -. 1(1:S,U;!f: Un..,i • 14J~jtW'. f(I(I • :.'H'I64;":HI(1
4 • :'J2'i'~!::F.:HIO • ,m... Wy':+OCl"'AU!lt: .",
r .<t"Or<ttI:f11I 2
" 7
• ~<"'6;:41 f'l(I1 •• :U .J(I;!(l1:Hll•;:'1"'::0.... -0:: .(I(IOO(I(l::W(1
;~ ..:S.~YA1~:H'1 - .60;S4;:/.I: 1<11-. t. \l4.lt/t: I (1(1 • (.(1('(1(10': 1(1(1
• ;MY7",c,tHn
.~·;WO/~:t:fOI
• 1::014/~:+(11
- .ll'Iy....,~;1: I (I.
..
• H""'J(I~"+OI
'.
·1
••
....
wistrla··lnsf-j14Y1Xt.rJAi:""'l6!1Y~Ii!TlrF.JI"H'Tr-----, (I
NS- I Nfl-"-ALAHl2T1
t
.. J. 2
- • :.!(I(I(I(I(lr -(11
.0(1(1(1001;; +(1(1
• (.I(I(I(I(I(I~HI()
,4 • I !S4(I(I(I~:+(1(1 - • 24"'(I(I(I~:+(.IO • YY6(1(IOl:Hl(l .0(1(1(1(1(11: 1(1(1
YOU HilS'" fif:I.~:c;l' WIIH:H ~4 eIU,(f'lI'f!i WlI.I. lIl: moE/) '(/) n::n, 'filL- mJl;L:lW':I~
nu: CllHI"IHS I:ORI<E.SPONI.I '(/) 1:III.lIHN!; IN "AI. fItlj 2"tiF..U:C H." C/II.U11NH WII.l. I'UkH A HAUUX 'fHM HllSl' fJ,: Nlltl~;ItmIlI.AI~
ttfH:1< lIun'lIn; fIl Ill! UCF:D (ltfl F.lif.lU• ", ;!. ~< .' ...
...nlt-.i*.**UUiTf'rA'!:tlXlltl i-:IllIjlVAl.tJi,·!n"Olllfrj'f.[:RVI:I~U**************************** tlOIlf. 2U:Wl:iWAI,UI." (.t;~:HiIli1nff uu.u.""u.nuu****
uun.**** ftl'f~·k em l:IU,tlli" n(il:,lVt-ILUCZl
,"
f'1<E'J lOllf. VIII 'II:!' f, 0
LAHt','A t I~EAI." - • I ~OO'lVf; +<11
Wl!ill ro I;II("/lil';", /EN rrk m::w VHI.II~: IIlI
, -5 0liLli/ Hllr.IIVI4I.IIf:":I'k£VICUli VI4I,I1~:~'"
, tL ..HftIlA :!I1;;£0\1 .. - • A:~(J(J(J(II( HI 1
WJlm I (I 1:IIAtlfil';"
" 1Etl n:R tlrw VALUL Cfll
, -I. (Jtill< I I( IllFtlVI4L ill:: Ir'kEVlllll<; VI,UII'S',
, (I
LAHlllJA .URlAI.· - • ;!(I(I(JO('f" +<11
• 1:\(.(1(101: I(lAIj
~ !j
.1I,
.'
Wlflll 10 1:IIM/liP'
" 1[/1(1./< tlEW VAI.II~:(Il), ., 0Im.1I I" rlltl rklll1 rIlIll H(/IJ~:'I'
, l
* *u..*u I::XrONll He"l!: 2 ..tu ,
t ...uuuu,ut (,'::llW/I f.lllr.HVF..(, rllral ~·fIf~ l/r.<tir.W,'i:RU.c,uUUU..u..u u /1(11)1: ."I(llj[NV~:r.WIl It$!lWIIHnn uu ,
, ,I.~

/
.//
, II " ~
: '&:, .,
1'-
• t.~
f, ,-
ORtGiN,I.\t Pilfjt~ mOF POOR QW\LrN 133
ClH(tll)• 6'1l-000f.+(1 A.1'11(.(10.:+0;• ;"''I(I(I(,r.H'l
( Rf~(tl.l,~HIO('('f: .o~
-.lJ/OO('f:H'loJ 24(.(.(,.:H'~
PktVIOUf; V"l.lIf~Il'(
" 0E It.U4WCI IIR V 11
IIT&H TO (:HI,HIWT, {
ENH:R " Hrw llI:Slf'<l::1l vI:r.nm I, I 000 Q 0
1JI~IlIRI::II VI:l;r1lRl
{
.4<'('''('0''+01"I;TIIAL Vl:tTllk I
• ('(.OOOOf. H.(. .0(100(101: /(1(•
.0('(1('0('.:. (I(' .0('('0(.(." H'(,U'NClTlt IIf" rH'~ nl:(;uu·.n vu;nm'.£ImTH or THI:: f'klJ.JFI;n,1"1 VU;/lIlhI.nmlH IIf rut: '-:h'IWk Vf:cnmIN rHI:: rkRlJR ",:I;I:f'Utlfl.n
, 1flI:: l(( £I c:.1':I/vn rem IClllF:,4VEC TIlfc V?ol (1<.:111.)
.411/l'O(lf:H,;!- ,1;"000F.101
.100('''('.:.0 ~+:kl~"R VF.r. TOR I
• 0000(1(1': +0(1 • ('('(I('('vl:l (,(•
,('(1(10(1(1.: 1('01.(1(1(.(10(.1. ('(I('C'(I(I
.0('(10('(,
( {fWi)•• 6~'(,(.(Jvl:to J-.1','4(1('('1: I (I;!
•,,
WI!:IH 1"0 l;IlAHGE?, 1
Cltrt:l~ I. Hl'W Ill:R I kr II VEe lIJR I'('('10GO
IllSIRlIJ v,:e rflll!
,('00(1('('.: .0(,"';TIII\I. V.:ClOlc I
• ('('('OOM: llJO
.OOOO('OE+OOI::Rkllk V.:r.HJR I
.'1;I,
.0('('('(1(,,: I (1('
'('('('0('(1.: 1001.000(l(l{)t ,('00(1('0
.00(1(100
UHAil)•;'''1('('('': +(JI'
- ,'17(.0(101:-01./('.,.0(.(1.: -(11
• (/01'0('0.:H.(. .000('0('.:H.(.U~NGTH OF' THI:: llF.SXkl:l) Vf./:WRl.rl/liTH "'" rill:: ."IfIJt.c.n:lJ Vf:r.:Wk_1••~NlilH IIr ftW .:mWk v.:nIlRIN rHI:: f:RRllk "';O;f'r"lll.f:'(
, 1
NI::X r ElGENV.:(;UlR IElUf:NW:I;UJR V.J! "(RI::"U
-. ;'06(.(,(." H.(,-, ~HH'O('.:H'o
.-t/9('OOHOlWXNHro I;HI,NliF:1'
., 1EN WR A tWW U1:~ XRl'l~ Vf.t:'fOk I'('00(.(,
I)ESIRED VF.C/lIRI
/i/
j~ .
• ('0(.(1(1(••: H.(,A':Tl/Al VI:CrOlc I
.000(1('0.:H'(, • (100('('(,.:H,(,IW lHI:: [llSIR.:lJ V"t:'ffll~(If' rHf: f'IW.JF.C; n:u VfCTrJ/<"IIf' fHI:: I:.R'WR V':I:W".:llllllR Al:fF.f'r"IlI."·'
.0(lO('O(lI:H.O+:l<kOR Vii(: rOR J
U~Nr,rH
I.n/GTH1.t:tIIHHIII flfl:
, t
··LCI~··'-•••f'ftN .ttl r!4HsHRXX V I
.0000('('1:+00 • 1OOOO(./;" +0 1
,(I(I(I(.(.(,t; 1(1(1
1.0(1('(1(1(1
1.0000(1(1'('(,('(1(10
• (1(1('('('(1(10(1(.('(10('.: too • ('('(1(1(1(100000(1('0.: 1(1(1 ,
-

134
44'1 j l+· .~..... ; iiP3 Ii
.'
• (1('('O(IO(l(I(I(I(IO(l(l~:+(1(1
.1000000(I(I(I(1000~:+01
•
• 1(l(IOOOOOO(lOO(I(lI: 1</1• (1(1(1(1(1(1(1(1(1(1('(1('01:+00
.j98Ia6~~~JIY6YE+0~
,4 • (1(1(1(1(1(10(1(1(1(1(1(1(11: +(1(1 • (I(I('(I(I(I(I(I(lOOO(I(I~: '00WIIlU ru I)HWI.HY rill': t!(IkH(tL UI:'I) F.HlWv~:troR6'f
, (I
liMN ill.nUX "'j1
/
'* 44 '4": '.5 4 0; *+tfN4; Cwa.A 4 ".4#.> 4 ~,eq.$jitl'U>iA ,.' at.,,,,.:r ·--·,,.~ ""r~
t~.
~;
f. ,/'/
~ .
;4 -. ;1~:0~l8UJ:t04;U621:.+01HATRIX HHMI
-. ,,·.....UO/(l"(.ll/itll~·I:'+(I j
.1
- • lW(IO(I(I(I(I(I(lO(I(1U'+01
-. 6(10(1(1\1('(I(l(I(lO(l~:I:·'0 i
1 :l :S 4
• 1ya ((t6£ HI~! -.3662461£+00 -. :f;!o:mV~:+(II .(1(1(10001£ 1('(1
" • JMtl:S6I':HI1 .16/4~;n;+0:t .;1(1(1 1(llll:+O:\ • (l0(1(1(1(1t. 1(10
;1 -dll~I1It.f(1(I • tl;W61 Yt.-02 -.6YY')(In~1(11 .110001101:'"HloHMIHX 1£1
:l :S
-.!l(I(I(I(I('IOHII • ;11;11:.1111':-10\ .14210YE-!J
:l -.;11'1/44':-1;1 -.10(/0(10('10+01 .2a4:l1l~:-IJ
:\~4 .IJI6;MI':-I .. -.:;55112.:-16 -. 1('('('(1(,': , 0 1HI\lRlX kl
:l J .-.:ta66:lYF.+00 -.:ty:tav"':-Ol -.211;UHiH02 -.37Hjt\:!~:+(I(I
:l • 1114;4 Illl: +00 • ) 1O;r/tl~:HI(I -.1/1 ;IH/t.fO:.! .";1'I6U(I':'01PAUSI;. ;lCl .',,
HAr'UX <II \:l ;\ :- I
-.H'I1H;IHI':f(I~~ .::;:1I2f:1E:f('1 - .IIH1(1m: 1<12 • I 23747f:f(I(1
2 -. 4~~16(16':+O2 •• a;\6Y;I:II':+(l2 .5761tllE:'0~! -.U:SU42n(l(l
.1 -. !:.~Y:!1l4no1 -.:1468161"-01 .4114IH;lrf(l~ • :·~"(t1 ;!";.~.(J(JHMlnX n~1
:!
• 2(1(1(1(10..fO~! • (/(1(1(10(1': f(l(l
2 ,00(1(1(1(1':HI(I • 25(1(1(I(I~:+02
/I
.'...
//,
rj,;•
d .14:tl0a~4/1~2(12F.-13
WlllH ru "XU H;:QI'I lHUI 1'111I'110'"T 1 •~******.**.***********.**••,
LI
.•• ;t(IO(I(IOCI(IO(IO(I('(lC I 01
;1 • (J(l(J(J('(11O /(J(J • (JO(/O(I(IIO WCl'F.trr~~f(-li~rTx'AL I:ut/ll HW/-/H F'mr lJ/l /ll.(fIA,=-mn~
'00010(1(1IIBIO nit: I"UI.I.llWXtlll HllHAI. (;lIlWUlllIlS IN nilE 1<£:(.....
YOW) 1
• (1(.(1(100000000001:: +<10
:l • (J(I(I(IO(l(I(lO(l(.(I(I('f. +<1(,
,I ,IIOOOOOOOO(l(I(J('(IF, fOO
4 • .I0(.0000(1('(.(I(I(I(lt.+<"
•&j1'-

i /f
a j ... 34)44; .a;s Ii qQ I q", i4¥¥4¢1
../
, , /
5
It
.,H
.,
.0000(1(1(1(10(10000£+00
• (1(1(1(1(10(1(10(1(10(101:+00
• (IOO(I(I(I(I(I(I(ICI(l(I(I~:+(1(1
• OO(I(I(I(ICIClOOOOOOt. +0(1
.0(1(1(1(1(100(1(1(100(11:+(1(1
ht Z qsZW $ un".} 4,:a ::
ORIGINAL P;\l~:~ ~:1OF POOR Qtl.~lj";·.'
; 4Jj)$$$Sl
, ,
135
/
......-:..
..J ..;,;a.-~
,.J'--~IE
/I
10 ,ClOOOOOOO()('(J(I(I(IIC+C10WXll« ru rill UIII:: Rfl;f'IlNIlI:'l'
, j
nn**********,,******u ttm,t: "lllttL" IllttUI/,' lIlN u**u*uun*un.....****u****,.. ,:HfllIfW IWilIl.AflllN IlPfXutlRI-EN'(fHH 1 TO Slttllu,n: fA], :. l'U filttlJUtj'r: r:,',HM:ld:J nm ':"UUII
f 2
[NiCk 0 fll SXl1l1L/tTI!: f)/rfPll'fl., j HI IlllIlI/.An: l;r/t"~: VAI~IMll.r.I,1, 1
£Nfl':R liXI1I11.I,fXIlN nttf, C1~/;"Al, Ntll1fCt:R II~ Sf:l:UlI1'ISIIf 10
CNn:R NIIHfC~:R Ill" PIlW'f!' 'f() llf: I;ALI;U1,AH:ll, (2\)(1 I1kj(11, 200
Sf'l'CJrr nu:: WHUtl. ,:mWHXUW:Ix H(I) 1
, (I
X ;!(O):, (.
1. ;H(I)I, II
X 4((/11., 1
X 5((111, (I
1. 6(011, (I
I. "((111, (I
I. 8(0) 1., (I
)( 9«(1) 1, CI
,1(10(011., (I
CHOIlSr. INPlff IlP'fXUUlH 1 fllll tIC) INr'IIT. :- fllk A ~tE:' H!I"lrr,;1. fOR A 1U.IIP,/tND " fllR A t1Wllf;A"t:D R/.,1I'1
ltWIH IW'fXllN f('k II 11., 1IN~'lIr ('PtlON FOR II 21
., 1
£NJF,;I< (I fOR 8(1 IH~f".Il\' CIIl.lIttNSo1 fllR 1~~ 1;111.IIIINSI., (I
£Nn:R 0 ~'Ol< lNlIIVlIlII(tl. ANI) 1 f'OR III1UXPLh PI.II'ffil, 0
DIl YIIIl WIIl« ru ~~: IfHt: ttXN-MAX RIltWt:1l )'(lR l'Hl: AXfl';", 1Eun:R ttIN X,MAX X,MHI Y,MIU MAX Y VALII~:SI
, (J j~ -,(I(JS ,(I"~
PllsnWN PAP I:': I< A·f WI' Ill' FCml1 AliI) l'Yf>F. ANY XNTl!:fjf,l~YfllI MAY I,U» " IlHIIl<r Nun, (:.10 (;HA'~/I':'rI:':~!l,)
THE TInE RESPONSES ARE NOW PLOTTED. RESULTS ARE SHOWN IN FIGURES

,/
!I
I
;
«
/
•"~
,,
!
1
/I
II ....j/
/
.-l
/!
I
I1
jII
/I,;I
, Ir
. ./

...
IIIII 111111 11~~~~1111Iilllrrl]rl~rll ~lfllrl~IIIIIIIIIII '.,3 1176 00512 5944e i
...>