Embed Size (px)
Citation preview

National Institute of Advanced Industrial Science and Technology
ISSN 1880-0041
上:バイオテクノロジーのための汎用ヒト型ロボット(p.6)下:力制御によるナット締め作業を行うヒューマノイドロボット(p.7)
●
●
高精度な位置合わせが可能な電子デバイス実装技術微細バンプ接続で低温加圧と高い位置合わせ精度を実現
レーザー援用インクジェット法低抵抗配線を可能とする工業用インクジェット
15
16
パテント・インフォ
テクノ・インフラ
太陽電池の校正のトレーサビリティ確立方法国際整合化とさらなる技術発展を目指して
精密流量計—大気圧中への漏れ検査の国家標準—地球温暖化対策から自動車、医療機器まで
精密模型による地質情報の立体化技術精密三次元造型とプロジェクションマッピングの連携
●
●
●
17
18
19
特 集
2
リサーチ・ホットライン
●
●
●
水道管の漏水を学習型異音解析技術で検知熟練工による漏水検査の手間を5分の1に低減
アルミニウム溶湯加熱用の高出力ヒーター高熱伝導セラミックフィラーでヒーター出力が5倍に
小型軽量な非破壊検査用パルスX線源プラント配管設置場所などの狭い空間でも撮影可能
12
13
14
ロボット革命を駆動する産総研のテクノロジーロボット革命への橋渡し人の移動を支援するモビリティロボット技術人の生活を支援するロボット技術<まほろ>誕生物語 —汎用ヒト型ロボットへの発想転換—
ものづくり産業を支えるロボット技術安全な社会生活に資するロボット技術過酷環境での作業に対応するロボット価値創造を生み出すロボット技術
11 2014
NovemberVol.14 No.11

2 産総研 TODAY 2014-11 https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
ロボットによる産業革命
「産業用ロボット元年」と言われた1980年の市場規模は約760億円、その後10年で6,000億円規模の産業に急成長しましたが、1990年以降の四半世紀は景気変動による浮き沈みのみで基調は変わっていません。この間、円高により日系工場が海外移転したことを主な要因として輸出が増え、過去15年間では製品単価も半分になりました。
開発投資を見ると、1990年代は産業用ロボットメーカー以外では弱電メーカーの研究所が主な担い手でしたが、2005年に開催された愛知万博のころから、トヨタやパナソニックといった企業が本気で事業にすべく、100人規模の開発チームを投入するようになりました。近年の民間投資規模は、産業用ロボットの開発投資規模並の年間200 ~ 300億円となってきています。米国でも、数十億円規模の投資を集めるスタートアップ企業が興隆し、その一部をGoogleが買収したのは記憶に新しいところです。
一方、わが国の社会状況は、急速な少子高齢化が進み、2005年からの20年間で労働力人口は約500万人減り、高齢者は約1,000万人増えると見込まれています。このような社会背景の下、安倍総理がロボットによる産業革命の実現を成長戦略の一つの柱に据えたのは、至極自然のことと思えます。
ロボットによる産業革命の実現方法
問題は、ロボットによる産業変革をどうやって実現するかです。
経済産業省が2012年に実施した調査によると、従来型産業用ロボットを除く市場規模は、ロボテク製品(ロボット技術を活用した機器。自動運転システムなど)を含めても2,000億円程度に留まっています。その主な理由は、ロボット技術が産業変革のソリューションになっていないことです。各産業は別段ロボットを使いたいわけではありません。低い生産性、過酷な労働環境、人手不足などの課題を抱えていて、それを解決して欲し
いのです。これまでも、ユーザーと協力したロボットの開発は行われてきていますが、そのやり方が不十分でした。
下図をご覧下さい。まずは対象となる業務を分析し、ロボットなどの設備投資をしたときの利益率がどう向上するかを予測し、ソリューションを提供します。そして実際にリーディングユーザーのところで運用し、その詳細なログデータに基づいてユーザーとメーカーにフィードバックをかけます。メーカーに対しては、効果評価や安全性などの設計支援を行います。このようなPDCAサイクルを短期間に大規模に回していくことが必要です。
産総研は、このサイクルを実現するための基盤技術を研究開発し、ロボット技術の産業界への橋渡しをしていきたいと考えています。今回の特集では、このような取り組みをご紹介いたします。
ロボット革命への橋渡し
知能システム研究部門研究部門長
比ひ る か わ
留川 博ひろひさ
久
ロボットソリューションを実現するためのPDCAサイクル
フィードバックコンサルティング ソリューション 運営
フィードバック
対ユーザー 業務分析ROI 算定
効果評価設計支援
ソリューション提供
販売導入支援
保守・運用サポート
ログデータ
ログデータ
ソリューション化(System Integration)対メーカー

3産総研 TODAY 2014-11https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
はじめに
低炭素社会や高齢社会に貢献する移動手段として、ロボット技術を搭載したパーソナルモビリティを対象としたつくばモビリティロボット実験特区が2011年6月から始まっています。私たちは、特区を活用したパーソナルモビリティの広域自律走行実験、産総研-つくば駅間のモビリティロボットシェアリング実証実験などの公道(歩道)走行実証実験を実施し、インフラ支援型ナビゲーションに関する各種関連技術の研究開発を行っています。
自律走行車いす「Marcus」
屋内外の長距離自律移動を可能とする車いす型ロボット「Marcus」を開発しています。これまでに、ロボットに搭載したレーザーレンジセンサーや全方位カメラなどにより取得した環境データから、つくば市中心市街地などの広域3次元環境地図を作成し、それ
をベースとした屋内外を含む長距離(数km以上)自律走行技術を確立してきました。この技術はGPSが使えない屋内でも自律移動ができること、環境に一切手を加える必要がないことなど、汎用性の高い技術です。さらに、人などの前方障害物を検知すると、リアルタイムに走行軌道を修正し、回避できる機能も搭載しています。将来、高齢者の街中移動などに使われることを目指して、研究開発を続けています。
モビリティロボットスマートシェアリング
立ち乗り型モビリティロボットにGPSなどの各種センサーや情報提示装置を搭載し、予約システムや動態管理システム、充電ステーションとの連携によるシェアリングシステムを開発しました。これは、公共空間において電動パーソナルモビリティをユーザーが一人で借りて返すことのできる、世界で初めてのシステムです。現在、産総
研とつくば中央公園に設置した充電ステーション間で、産総研の職員が出張時などに使用し、主にビジネス用途でのシェアリング運用に関する各種データを取得・蓄積・解析しています。走行コースから逸脱した場合や急停止など危険な運転をした場合に警告が発せられる仕組みも搭載しています。2014年度中には、研究学園駅やつくば市役所にも充電ステーションを設置し、多点間のシェアリングシステムに拡張する予定です。
今後は、運用システムの検証やモビリティロボットシェアリングの実用化可能性検討を行うとともに、情報インフラを活用した移動支援サービスのモデルケースを提示したいと考えています。
人の移動を支援するモビリティロボット技術
知能システム研究部門スマートモビリティ研究グループ
松まつもと
本 治おさむ
図1 自律走行車いす「Marcus」背もたれ上部に3D環境地図作成用センサーを搭載
図2 モビリティロボットシェアリングシステム管理サーバーとの通信により動態管理や自動貸出が可能
管理サーバー
ロボット保管情報扉ロック開放指示など
ロボット位置速度情報
充電ステーション(産総研側)
モビリティロボット 充電ステーション(つくば中央公園側)
ロボット保管情報扉ロック開放指示など
予約登録・確認

4 産総研 TODAY 2014-11 https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
生活支援ロボットの必要性
高齢化が進むにつれて介護福祉にかかるコストが増大するため、ロボット介護機器への期待が高まっています。
実際、2010年から2025年までの15年間で、65歳以上の高齢者は約709万人増加し、社会全体の高齢化率(総人口に占める高齢者の割合)が23 %から30 %に上昇すると試算されています。特に2012年から2014年には高齢者が毎年100万人以上増加します。これに伴い、介護職員の数も2010年から2025年にかけて90万人増加して240万人が必要と試算される一方、現在、介護職員の7割が腰痛を抱え、離職率は20 %にものぼっています。このような介護現場の負担軽減を実現し、高齢者の自立を促進するための生活支援ロボットの開発が急務となっています。
ロボット介護機器開発・導入促進事業
しかし、先進的なロボット技術を利用した介護機器の分野は、市場性・安全性・実用性の問題から開発・製品化がなかなか進んでいません。これらの課題を克服するため、経済産業省は、①現場のニーズを踏まえて重点分野を特定(ニーズ指向)、②ステージゲート方式で使いやすさ向上とコスト低減を加速(安価に)、③現場への本格導入を促進(大量に)、の三つをコンセプトとし、2013年度より、「ロボット介護機器開発・導入促進事業」を開始しました[1]。この事業では、経済産業省と厚生労働省が公表している「ロボット技術の介護利用における重点分野」(図1)のロボット介護機器の開発・導入の支援を行うことにより、要介護者の
自立促進や介護従事者の負担軽減を実現し、ロボット介護機器の新たな市場の創出を目指しています。
この事業は、50社を超える事業者によるロボット介護機器の開発補助事業と、産総研を中心とした10機関で構成されるコンソーシアム(基準コンソ)による基準策定・評価事業から構成されています。基準コンソでは、これまでにロボット介護機器の開発に必要なコンセプト(実生活での活用法、利用対象者および必要となる機械的要件)を整理するための「開発コンセプトシート」や「安全コンセプトチェックシート」、「リスクアセスメントシート」の
雛形を作成し、開発補助事業者への解説を行うなどの支援を行ってきました。また、各重点分野の機器が満たすべき安全および性能の検証項目・方法をまとめた評価基準を作成し、これに基づいて2013年度末にはステージゲート審査会での評価を実施しました。
基準コンソでは、機器の効果の検証方法や装置の開発も行っています。具体的には、介護者および被介護者の動作を模擬するための人型ロボットおよび力学シミュレータ(図2)や、介護施設での業務(ロボット介護機器の利用状況を含む)を記録しサポートするシステムなどを開発中です。さらに、モ
人の生活を支援するロボット技術
図1 ロボット介護機器の重点分野(2014年度時点)の機器イメージ上段:移乗介助機器(装着型、非装着型)、屋外移動支援機器中段: 排泄支援機器、介護施設見守り機器下段:屋内移動支援機器、在宅介護見守り機器、入浴支援機器

5産総研 TODAY 2014-11https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
ジュール化開発支援のための高信頼組み込みCPUボードの開発や、ロボット介護機器の標準化のための調査・検討も進めています。また、プロジェクトの広報ページ(介護ロボットポータルサイト)[2]を開設し、研究成果や基準策定状況に関する情報発信を行っています。
生活支援ロボットの安全性検証
ロボット介護機器のように、人に直接触れて支援する機器や人の生活環境で動作する機器の場合、例えば機器が何らかの形で暴走したときには、人に与える危害が極めて高くなります。そのため、ロボット介護機器をはじめとする生活支援ロボットには、高い安全性が要求されます。
2010年12月に生活支援ロボットの安全検証を行う拠点として、生活支援ロボット安全検証センターが設立されました。このセンターには、生活支援ロボットの安全性を検証するための各種試験装置がそろっています。例えば、温度や湿度を変えてもロボットが誤動作しないかを確認する装置(複合環境試験装置)、走行する路面傾斜角度を変えても走行中に倒れないかを確認する装置(走行安定性試験装置)(図3)、ダミー人形にロボットを衝突させて人への危害状況を確認する装置(衝突試験装置)(図4)、ロボットが発生する電磁波が人に悪影響を与えないか、また電磁波の影響によりロボットが誤動作しないかを確認する装置(EMC試験装置)などが設置されています。
現在は前述のロボット介護機器事業において、開発事業者のロボット介護機器を対象に各種試験を実施していますが、2014年7月からは、一般財団法人日本自動車研究所が窓口となって、
それ以外の機器についても依頼試験を請け負うことになりました。今後ますますロボット開発メーカーなどに活用されるようになるものと期待されています。
生活支援ロボットの国際安全規格
これまでは生活支援ロボットの安全に関する規格がありませんでし た が、2014 年 2 月 1 日 に ISO13482
(Robots and robotic devices -- Safety requirements for personal care robots)が発行されました。これは移動して作業するロボット、人に装着して身体機能を補助するロボット、人の移動を支援するロボットを対象とする国際安全規格です。この規格は日本が基本構成を提案したもので、生活支援ロボット
安全検証センターでの活動が大きく貢献しました。この規格にはまだ定量的な基準などの記載はなく、今後生活支援ロボット安全検証センターでの活動を通じて、詳細化される予定です。
図3 走行安定性試験装置 図4 衝突試験装置
知能システム研究部門ディペンダブルシステム研究グループ
中なかぼう
坊 嘉よしひろ
宏サービスロボティクス研究グループ
松まつもと
本 吉よ し お
央スマートモビリティ研究グループ
松まつもと
本 治おさむ
参考文献[1] 比留川 博久 他:ロボット介護機器開発・導入促進事業–全体概要,第31回日本ロボット学会学術講演会(2013).[2] 介 護 ロ ボ ッ ト ポ ー タ ル サ イ ト,http://robotcare.jp
図2 模擬介護者ロボット、シミュレータ、模擬高齢者ロボット
装着型移乗支援機器
腰トルク測定
High
Low

6 産総研 TODAY 2014-11 https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門 http://www.molprof.jp このページの記事に関する問い合わせ:創薬分子プロファイリング研究センター
ライフサイエンスのボトルネック
革新的な測定技術の出現とともに研究に必要なベンチワークの内容は大規模化し、現場は果てしない手間仕事に忙殺されています。作業者の「上手い、下手」「気合い、根性、集中力」といった不確定要素や暗黙知に実験の正否と再現性が左右される中で、整合性のある実験結果を再現するために途方もない試行錯誤を繰り返す一方、多大なコストと時間をかけて作業プロトコルが完成しても、作業者が変われば雲散霧消することも珍しくありません。多くの実験で技術の可視化と共有化がほとんど行われていないことが、研究成果を一般化し、産業化につなげる際の大きな足かせとなっています。また、医学生物系の実験作業では危険なウイルスなども扱わなければなりません。
このような問題を解決し、ライフサイエンスとバイオ産業に革命を起こすために生まれたロボット<まほろ>の誕生物語を紹介します。
ベンチワークロボットの難しさ
約15年前、ものづくりの生産現場で活躍する「垂直多軸」ロボットを活用した、世界初のベンチワークロボットの開発に着手しました(図1)。しかし、この「1ロボット1工程」方式を基本としたライン生産が大前提では、各作業ステップにロボットハンドと専用の治具を配置しなければなりません。その上、もともと自動化を前提にデザインされていない分注機、攪拌装置、遠心機などの周辺機器をロボット用にカスタマイズするため、設計、試作実証、最適化に5年、教示に2年もかかりました。
膨大な時間と費用をかけて完成したこのロボットシステムは、一切のプロトコルの変更・修正を受け付けない「専用」の自動化ラインであり、解析法・実験法の陳腐化や作業手順の頻繁なマイナーチェンジに全く対応できませんでした。
専用ラインから汎用ロボットへの転換
そこで「1ロボット1工程」方式をやめ、人が使うツール・周辺機器をそのまま使い、すべての工程を一台のロボットがこなす汎用ヒト型ロボットへと発想を転換しました。
2001年、このアイデアを株式会社安川電機の鈴木専務理事(当時)にぶつけたところ、双腕ロボットの開発責任者の小川氏(現・安川アメリカ社長)とその精鋭部隊と研究を進めることになりました。2012年の夏、世界初の汎用ヒト型ロボットのコンセプトを実証(図2)するとともに、その後の本格的な共同研究を経て、実験の熟練技術を可視化し「遷
うつ
し」、ロボットが人間を凌駕できることを次々に証明しました。
また、将来の新事業を見据えて企業とともにビジネスモデルを構築し、経営者・技術者から営業に至るまで<ま
ほろ>というロボットシステムの概念と価値を共有しました。産総研と企業が一つのチームとして機能するため、アカデミアの大学研究者や臨床医も同席のうえ会議や勉強会を何度も行い、真のオープンイノベーションを実現するため、リファレンスサイトの設定やロボット活用研究会の設立などの仕組みづくりにも汗を流しました。
誰もが使えるロボットを
数年後には、すべての研究室のベンチでロボットが働く世界を目指して、特別な経験や知識がなくともロボットに高度な作業を教示できるインターフェースを完成させ、各分野の研究者の作業手順をいち早くロボットに遷し標準化し、プロトコルを蓄積する必要があります。
多くの研究者が、ベンチでのルーチンワークから解放され、人にしかできない仕事に十分な時間をかけて向き合える環境を実現したいと思います。
<まほろ>誕生物語—汎用ヒト型ロボットへの発想転換—
関連情報汎用ヒト型ロボット"まほろ"によるベンチワークの高度化,産総研You Tube, http://www.youtube.com/watch?v=l4W9d9ZVJyQ
図1 「1ロボット1工程」方式のベンチワークロボット 図2 汎用ヒト型ロボット「まほろ」
創薬分子プロファイリング研究センター長
夏な つ め
目 徹とおる

7産総研 TODAY 2014-11https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
はじめに
ものづくり産業においては、現在、溶接や加工の工程は比較的ロボット化が進んでいますが、組み立て、部品供給、製品検査などの工程ではまだまだロボット化が進んでいません。産総研では、知能システム研究部門のタスクビジョン研究グループを中心として、組み立て、部品供給、製品検査の工程のロボット化を進めるべく、研究活動を行っています。以下では、そのうちのいくつかを紹介します。
環境や対象物の認識技術
3次元視覚システムVVV(Versatile Volumetric Vision)は、さまざまな状況で任意の形状の立体を対象として、距離計測、形状表現、物体認識、運動追跡の処理を一貫的に実時間で高精度に実行可能なソフトウェアシステムです。
例えば図1では、観測シーンの3次元情報を計測し、その特徴量を求めて幾何モデルと比較することで、自由曲面で構成された対象物を検出可能にしています。また、図2は特徴量の少ない管状物体において、主曲率ベクトル分布を理論的に解析することで、対象物を検出しています。
把持・動作計画技術
graspPlugin for Choreonoid は、 ロボット動作振付統合ソフトウェアであるChoreonoidをフレームワークとして、ハンドが対象物を把持する姿勢や、ロボットがハンドで対象物を把持する動作を計画するなど、種々の計画問題を解くことを可能にしているソフト
ウェアです。図3では、双腕ロボットが必要に応
じて両手で対象物を持ち替えながらピックアンドプレースの動作を計画しています。
力制御技術
ロボットの手先が加える力・モーメントを制御することで、さまざまな作業がロボットにより実現されるようになります。
例えば図4では、ヒューマノイドロボットの手首にそなえられた6軸の力・モーメントを計測するセンサーを利用して、ロボットがナットを締める作業を実現しています。ナットを締める場合、ナットを正しい姿勢でボルトに当てるために、引っかかりの情報を利用します。これにより、最終的にナット締めに成功しています。
ものづくり産業を支えるロボット技術
知能システム研究部門タスクビジョン研究グループ
原は ら だ
田 研けんすけ
介
図1 一般的な3次元物体の検出
図3 対象物把持を含むロボットの動作計画
図2 管状物体の検出
図4 力制御によるナット締め作業下はロボット右手部分の拡大図

8 産総研 TODAY 2014-11 https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
機械の目となるセンシング技術
生活支援ロボットや自動車の自動運転など、「機械の目」が私たちの生活を支える時代がいよいよ始まりつつあります。人間は視覚情報に強く依存して生活しているため、それを支える機械も人間と同等、またはそれ以上の視覚能力をもつことが望ましいと言えます。
私たちは、図に示すように「機械の目」を実現するための基盤となるさまざまな技術に関する研究開発と、その社会への橋渡しを行っています。
三つのセンシング技術
技術は大きく三つに分類することができます。一つ目はいわゆる「眼」に相当する技術です。ここで的確に情報を取得できるかどうかがシステム全体の性能を大きく左右します。36眼で全方向のカラー画像と距離情報を同時に取得する「全方向ステレオカメラシステム」など、これまでの常識にとらわれない新しいシステムを提案し、そのパフォーマンスを評価しています。具体例としては、道路を走行する自動車よりもさらに複雑な生活空間を、歩行者とも共存しながら移動することが求められる電動車いすの安全確保への応用に関する研究を行っています[1]。
二つ目は、通常のカメラ画像のように2次元で取得したデータから3次元情報を復元したり、レーザーなどを用いて取得した複数の3次元データを統合したり、さらにはそこから得られたデータを用いてさまざまな量の計測を行ったりする、いわゆるデータの「物理的」解析技術です。これは前述の電
動車いすでの障害物検知などでも用いられているほか、産業用ロボットの
「目」など、さまざまな場面で重要になる基盤技術です。
三つ目は、例えば監視カメラの映像に異常がないかを分析する、データの
「意味的」解析技術です。その一例として、産総研が独自に開発した高次局所自己相関特徴抽出法(HLAC)とその応用技術があります[2]。具体的な応用例として、「異常」を自動的に検出するシステムを構築しました。「異常」を定義することは困難ですが、HLACと機械学習技術を組み合わせて「正常」を学習し、そこからの逸脱度を「異常度」として定義することにより、監視カメラからの異常行動の自動検出 [3][4] や病理検査画像中の異常細胞の自動検出などができるようになりました。
これら三つの技術とその組み合わせはまさに「機械の目」を支える基盤技術であり、今後さらに高度化を進め、安全な社会生活に資する技術として社会にアウトプットしていきたいと考えています。
安全な社会生活に資するロボット技術
新しいセンシング
物理的解析3D復元、SLAM
意味的解析画像特徴、機械学習、ロバスト
福祉 安全・安心 医療
インテリジェント電動車いす
社会への橋渡し
自動監視カメラ(異常検知)
病理検査アシスト(異常細胞検出)
◯ 知的センシング技術
知的センシング技術と社会ニーズに応じた展開
知能システム研究部門スマートコミュニケーション研究グループ
佐さ と う
藤 雄ゆ た か
隆
参考文献[1] 佐藤雄隆, 坂上勝彦: Synthesiology, Vol.2, No.2, 113-126 (2009).[2]大津展之: Synthesiology, Vol.4, No.2, 70-79 (2011).[3] 産総研プレス発表 2005 年 5 月 24 日
「人および動作の認識方式で世界最高性能を達成」[4]産総研プレス発表 2007年10月16日
「カメラ映像から異常動作をリアルタイムで自動検出するソフトを開発」

9産総研 TODAY 2014-11https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
急がれるインフラの老朽化対策
インフラとは、インフラストラクチャーの略であり、生活や産業の基盤となる設備や施設のことです。社会インフラは、道路、河川・ダム、港湾、空港、上下水道や電気・ガスなど、広い範囲に及びます。日本の社会インフラの建設は、高度経済成長期の1960年代から1970年代にかけてピークを迎えているため、今後20年で建設後50年以上経過する施設の割合が加速度的に高くなります[1]。社会インフラの老朽化対策では、機能の低下、維持管理・更新に対する財政問題や人材・技術不足が深刻な課題となっています。
このような課題に対して、センサーやロボット技術などをインフラの維持管理に活用することが期待されています。経済産業省および国土交通省は、2013年12月に社会インフラ用ロボット開発・導入の重点分野として、橋梁、トンネル、河川・ダムの水中箇所などを策定し、2014年度から各省で研究開発事業と現場検証事業を開始しています。このうち、研究開発事業はNEDOの委託事業として実施されており、こ
こでは、産総研が関連する橋梁と河川・ダムの水中箇所の維持管理用ロボットの開発を紹介します。
困難な環境における点検のために
橋梁は、日本全国に約70万橋(橋長2 m以上の道路橋)あり、68 %は市区町村で管理されています。維持管理のための橋梁定期点検要領は2014年6月に改訂され、5年に一度の近接目視の全数点検が基本で、自治体や点検業者に大きな負担となっています。そこで、川田テクノロジーズ株式会社などとともに「マルチコプタを利用した橋梁点検システムの研究開発」に取り組んでいます(図1)。この開発では、橋梁下面を飛行し、点検箇所の精細画像を取得する有線給電式のマルチコプタシステムを開発することで、網羅的かつ均質な定期点検を支援することを目指しています。
河川・ダムにおける河川管理施設は、全国に約3万施設あります。また、河岸や、橋脚部の洗掘(流水により土砂が洗い流されること)が問題となっています。そこで、株式会社キュー・ア
イなどとともに「可変構成型水中調査用ロボットの研究開発」に取り組んでいます(図2)。この開発は、ダムの設備や堆積物の調査、流れのある河川での洗掘調査に対し、環境と点検対象に合わせたモジュール構成を可能とし、広範囲で多目的な調査を行うことができる点が特徴です。
このようにロボットは、センサーを点検箇所にアクセスさせるための移動機能であり、人の立ち入りが困難な構造物の点検には不可欠な技術となっています。
インフラの老朽化は、産業インフラである石油精製プラント、化学プラント、製鉄所、発電所などにおいても同様に問題となっています。より複雑な環境となる産業インフラの維持管理を支援するロボットシステムの開発にも取り組んでいます。
スクリーニング点検用機体
構造物に接触せずに一定距離で飛行し撮影
高精細カメラによる床版撮影
有線給電及び操作装置
通信システム
LED付水中カメラ
水中ロボットソナー
ソナー
洗掘点検
ワイヤ
リール機構通信システム
水上ロボット
水上ロボット
◯ インフラ維持管理ロボット技術
図1 橋梁点検の運用イメージ 図2 ダム設備・堆積物、洗掘調査の運用イメージ
知能システム研究部門フィールドロボティクス研究グループ
加か と う
藤 晋しん
参考文献[1] NEDO:インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」基本計画 (2014).

10 産総研 TODAY 2014-11 https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
危険な災害現場の状況を人に代わって確認し、作業するロボットが求められています。福島第一原子力発電所では、Quince や PackBot などのクローラーで移動するロボットが活躍していますが、人が活動することを前提に作られた原発のような施設は、人に合わせて通路や階段の幅が決められているため、ロボットにとっては移動が容易でなかったり、垂直はしごのような人でなければ移動できない場所があったりします。このような環境で活動するには、人に近い形態をもつヒューマノイドロボットが有効であると考えられます。
災害現場で働くことができるヒュー
災害対応では、まず現場の状況把握が重要ですが、過酷な環境であったり二次災害の危険性があったりするため人の立ち入りが困難な場合が多く、環境や現場の要求に合わせたロボットが活用されています。
福島第一原子力発電所の廃炉に向けては、建屋内調査が進むにつれ、配管が入り組んだフロア高所の調査が必要となり、高所調査用ロボット(図)を株式会社本田技術研究所と共同開発しました [1]。2013年3月に導入され、これまでに2、3号機における高所の撮影や線量計測をしています。この開発では、運用と帰還を考慮したシステムの高信頼化と対応策の検討が、ロボットの可用性、安全性の向上に不可欠でした。
火山や土砂崩落の災害対応にもロ
マノイドロボットを実現するため、(1)初めて行った場所でも自分の周囲の状況を正しく認識できる環境認識機能、(2)足先だけでなく、手先やさまざまな体の部位を環境に接触させて移動や作業を行う動作を計画する多点接触動作計画機能、(3)計測誤差などの不確実性が存在する環境で、計画を適応的に変化させながら実行する全身動作制御機能の三つを連携させながら、信頼性高く動作させるための技術開発に取り組んでいます。
一日でも早く、作業員の方々を過酷な作業環境から解放できることを目指します。
ボット技術が活用されています。現在、株式会社日立製作所などと共同で、NEDOの委託事業として、地上移動型と空中飛行型のロボットの利点や特徴を活かした複合的な形態で運用を目指した「災害調査用地上/空中複合型ロボットシステム」を開発しています。
今後も、過酷な災害現場で活躍できる頑健性・信頼性の高いロボットシステムを開発し、導入判断に役立つ評価や基準策定などにも取り組んでいきます。
過酷環境での作業に対応するロボット◯ 災害対応ヒューマノイド
◯ 災害対応調査ロボット
・最大到達高:7 m・重量:約1,100 kg・最大速度:2 km/h・最大踏破段差:60 mm・アームロボット: 全長1.7 m、11自由度・通信: 光ファイバー有線LAN 400 m 無線LAN 801.11g・バッテリー稼働時間: 5時間(1ミッション想定)
1.8 m(最低)
5.3 m(最高)
長さ1.8 m 幅0.8 m
高所調査用ロボットの外観と諸元左は高所調査時、右は運搬・移動時
知能システム研究部門ヒューマノイド研究グループ
AIST-CNRSロボット工学連携研究体
金かねひろ
広 文ふ み お
男
知能システム研究部門フィールドロボティクス研究グループ
加か と う
藤 晋しん
参考文献[1]山野辺 夏樹 他:日本ロボット学会誌,32-2, 145-147 (2014).
両腕・両足を使って垂直はしごを登るヒューマノイドロボット

11産総研 TODAY 2014-11https://unit.aist.go.jp/is/ci/index_j.html このページの記事に関する問い合わせ:知能システム研究部門
ロボットが社会に普及するには
速く走れる車をつくったとしても、道路がなければ、その性能を発揮することはできません。すなわち高性能なロボットがあっても、社会にそれを使う仕組みがなければ、使いものになりません。このような問題意識から「気仙沼絆プロジェクト」[1]は始まりました。
当初、東日本大震災後の被災地を訪れたときは、技術で解決できる課題を探していました。しかしこれは本末転倒な考え方で、そもそも技術は二の次であり、「被災地で必要とされる支援は何か」ということを明らかにし、必要な支援を導入するための仕組みづくりから始めるべきです。その後にようやく必要な技術が明らかになります。
被災地の状況と今後の高齢社会
被災地では、災害により地域のコミュニティが崩壊しました。被災した高齢者の多くは仮設住宅に入っていますが、地域のコミュニティがなく、外出する動機がありません。そのため、家に引きこもりがちになり、健康を害していくという廃用症候群(生活不活発病)とよばれる疾病が増えていました。このような被災地の状況は、高齢社会である日本の縮図として今後顕在化する課題であり、この課題を解決することは、今後の高齢社会への対応につながると考えました。
支援に基づく必要なロボット技術
廃用症候群を防ぐためには、外出する動機付けとなるコミュニティづくりが必要です。まず、コミュニティが生まれる場をつくること、そして、コ
ミュニティが活性化し、持続するためのコンテンツを用意することが必要となります。ここでようやく必要な技術が明確になります。場を提供するためには建物が必要です。しかし、建物を建てることはすぐにはできません。そこでトレーラーハウスとよばれる住居に車輪がついたもの(図左)を導入しました。建物だけでなく、電気や水道といった設備も必要です。被災地で早期に活動するには太陽光パネルや、蓄電池などの自給自足的なエネルギーマネジメントシステムの技術が必要となります。
次にコンテンツとして、いくつかの健康につながるロボットを入れました。ロボットを置くだけではなく、健康イベント的なものと、日々の健康がどの程度向上しているかといった健康相談を合わせて、ロボットを活用していくことが重要でした。(図右上)
行政と民間をつなぐ社会システム
技術者が現場に入り、知見を活かし支援することは、復興につながる重要な活動ですが、最終的に復興現場が自立して、導入した技術を運用していく仕組みを残さなければ、真の復興にはなりません。行政やNPOなどが自ら民間企業の技術を導入し、行政サービスを考えられる仕組みが必要です。
現在気仙沼市と協力し、民間企業から提案された技術と地域のサービスをつなげることを目的に、行政と民間企業をつなぐ復興支援機構「気仙沼市住みよさ創造推進機構」を立ち上げました。この仕組みこそがロボット技術をはじめとした技術が社会に貢献できる社会システムとなります。
価値創造を生み出すロボット技術
参考文献[1] 生きる絆HP:http://ikirukizuna.jp/
知能システム研究部門統合知能研究グループ
谷たにかわ
川 民た み お
生
風力発電
太陽光パネル
エネルギーマネジメントシステム
電気自動車ガスエンジン
コージェネレーションユニット
定置用蓄電池
移設可能型排水処理装置
トレーラーハウス
電力量センサー
電力量センサー 家電機器
左:トレーラーハウスとエネルギーマネジメント技術右上:健康イベントとともに導入されたロボット

12 産総研 TODAY 2014-11
幅に絞り込むことを目指しました。今回用いた異音解析技術の特徴は大きく2点
あります。1点目は、人間があらかじめ何が異常音であるかを決めておくのではなく、コンピューターに熟練工の判断事例を与えて、異常音を検知するための最適なルールを自動的に学習させる点にあります。
2点目の特徴は、コンピューターに判断事例を与える際の音の特徴量の算出方法にあります。今回開発した異音解析技術では、一般的な周波数解析に加えて、時間軸方向の変化も特徴量に加味することで、コンピューターでの学習を行いやすくしました。
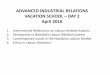
今回、二つの地方都市における77,789戸の漏水調査データを用いて検証実験を行った結果、熟練工による検査が必要な箇所を約5分の1に低減できることがわかりました(図2)。検査箇所の絞り込みは大幅な検査コストの削減につながるため、人口減などにより水道料収入が減少して維持管理費の低減が求められる地方自治体の支援にもつながります。
今後の予定今後は異音解析技術を改善し、誤判定をさらに
低減させていきます。さらに、この技術を海外にも展開し、漏水率が30 %を超える東南アジア諸国などでの漏水検知に役立てていく予定です。
わが国の水道管事情高度成長期時代に建設されたわが国の大量の
水道管は、今後一斉に法定耐用年数(40年)を超え更新時期を迎えます。しかし耐用年数を過ぎた老朽管すべてを更新していくことはコスト的に難しいため、漏水検知を基本とする日々のメンテナンスによって水道管の安全性を確認し、長く維持していくことが必要とされています。現状の漏水検知作業では、熟練工の作業割合が非常に大きいのですが、今後は高齢化による熟練工の減少が懸念されています。このため、熟練工の技能を一部IT化によって代替し、熟練工による漏水検査箇所を絞り込むことが求められています。
異音解析技術で漏水検知作業を効率化漏水検知の先進的な取り組みの一つとして、
音響式の漏水検査器を一次調査に用い、漏水箇所を絞り込む技術があります。これまでの実績では、熟練工による二次調査の件数を全世帯のほぼ10分の1以下に絞り込めるとわかりましたが、周囲の雑音などの影響で漏水でないものが含まれていることが多々ありました。
そこで図1に示すように、漏水検査器による一次調査で漏水が疑われる箇所については、異音解析技術*により漏水音と漏水疑似音を判別することで、熟練工による二次調査の対象を大
水道管の漏水を学習型異音解析技術で検知熟練工による漏水検査の手間を5分の1に低減
村川 正宏むらかわ まさひろ
情報技術研究部門スマートシステム研究グループ研究グループ長
(つくばセンター)
近年、計測、通信技術の進歩により、実世界の膨大なモニタリングデータを取得、蓄積できるようになってきました。この大量のデータから、異常状態を早期に検知する技術の研究開発を積極的に進めています。今後急速に進んでいく社会インフラの老朽化対策として貢献することを目指していますが、そのためには土木工学、機械工学、計測工学などとの融合研究が必須であると日々実感しています。
関連情報:● 共同研究者
叶 嘉星、高橋 栄一、樋口 哲也(産総研)、松木 隆一、秋元 要一、山崎 俊一(株式会社日本ウォーターソリューション)
● 用語説明
*異音解析技術:通常は発生しない音(異常音または異音という)をマイクや振動計により計測し、その結果を解析することで、異常の発生を検知し発生原因の推定などを行う技術。
● プレス発表
2014 年 6 月 25 日「水道管の漏水を学習型異音解析技術で検知」
写真 3.8×3.4 cm
図 1 学習型異音解析技術による漏水検知の位置づけ
図 2 学習型異音解析技術による絞り込み結果二つの地方都市 77,789 戸の調査結果からサンプリングしたデータを用いて実験した。
一次調査
音聴棒
全世帯 水道メーターの上に置かれた音響式の漏水検査器
水道メーターに音聴棒を当てて漏水を検査する熟練工
産総研方式
大幅な絞り込み
漏水検査器
漏水 可能性のある
箇所
真の 漏水箇所
漏水が 濃厚な箇所
異音解析によって 漏水音を自動で検知
人手で検査すべき漏水箇所を絞り込めるので、熟練工による検査の工数を大幅に減らせる
熟練工による二次調査
異音解析技術
従来技術による漏水判定
この技術による漏水判定
漏水の疑われる全てを 人が音聴棒で検査する
熟練工の工数を 大幅低減
音聴棒検査戸数を 5分の1に低減
漏水の疑われる198戸 スクリーニング工法(漏水検査器)などで選別した198戸
非漏水判定 160戸 漏水判定 38戸
音聴棒検査は198戸全部
音聴棒検査は38戸のみ
真の漏水 28戸

13産総研 TODAY 2014-11
Research Hotline
図 2 学習型異音解析技術による絞り込み結果二つの地方都市 77,789 戸の調査結果からサンプリングしたデータを用いて実験した。
を温度700 ℃のアルミニウム溶湯に浸漬した状態で通電し、ヒーター発熱体温度(ヒーター内部の温度)に対してアルミニウム溶湯に伝達される熱量をヒーター出力値として図示しました。これまでの浸漬ヒーターでは、発熱体からアルミニウム溶湯への熱伝達が不十分なため、発熱体温度を上げても高いヒーター出力を得ることは難しかったのですが、今回開発した浸漬ヒーターでは、熱伝達が良好なため、より低い発熱体温度でも高いヒーター出力が得られました。
例えば、2 kWのヒーター出力(図2青点線)が必要な場合、これまでの浸漬ヒーターでは発熱体温度を使用限界の950 ℃程度まで昇温させる必要がありますが、開発した浸漬ヒーターでは熱伝達が良好なため、発熱体温度を800 ℃以下に抑えることができました。また、ヒーターを長期間使用できる発熱体温度は850 ℃程度ですが、従来品と開発品で発熱体温度850 ℃でのヒーター出力を比較すると、今回開発した浸漬ヒーターは従来品よりも5倍の高出力化を達成したことがわかります。
今後の予定今後は、浸漬ヒーターのさらなる高出力化に
よる金属溶解炉への適用や、コンパクトかつ省エネルギーな炉の開発を予定しています。
浸漬ヒーターの長所と課題金属鋳造*産業においては、溶解した金属(金
属溶湯**)を炉内で加熱または保温する技術が必要です。これまでは、石油やガスの燃焼式バーナーや電気ヒーターを用いた輻射加熱で金属溶湯を保温する方式が主流でしたが、最近は、電気ヒーターを金属溶湯保持炉内で金属溶湯中に浸漬し、直接加熱して保温する浸漬ヒーターが急速に普及しています。浸漬ヒーターは輻射加熱の方式に比べて、熱の損失が少ないという長所がありますが、発熱体から金属溶湯に熱を伝える際の熱伝達が不十分なために、多くの本数が必要となるなど、設備コストの面で課題がありました。
フィラーの高密度充填により熱伝導を向上浸漬ヒーターには、発熱体とヒーターチュー
ブとの間にセラミックフィラーが充填されていますが、これまではセラミックフィラーの充填密度が低く熱伝達が不十分でした。そこで私たちは今回、セラミックフィラーの種類や粒度配合、充填方法などを最適化することで、発熱体を挿入したヒーターチューブ内にセラミックフィラーを高密度に充填することを実現しました(図1)。
図2に、同じ発熱体を用いた従来品と開発品の浸漬ヒーター出力を示します。浸漬ヒーター
アルミニウム溶湯加熱用の高出力ヒーター高熱伝導セラミックフィラーでヒーター出力が5倍に
堀田 幹則ほった みきのり
先進製造プロセス研究部門セラミック機構部材プロセス研究グループ主任研究員
(中部センター)
大学で 7 年間勤務した後、産総研に入所しました。これまで一貫して、構造用セラミックスに関する研究を行っています。今後、セラミックスの部材化プロセス技術と部材特性向上技術を開発し、これらを融合することによって、構造用セラミックスの適用限界を打破し、製造やエネルギー産業の分野への適用展開を目指しています。
関連情報:● 共同研究者
辻井 竜太、平田 享寛(株式会社ヤマト)、近藤 直樹
(産総研)
● 用語説明
*鋳造(ちゅうぞう):溶湯を型に注ぎ込み、これを冷却して固めて、目的形状の製品を作製する方法のこと。鋳造に使用する型を鋳型(いがた)といい、鋳造によって作製された金属製品を鋳物(いもの)という。
**溶湯(ようとう):高温で加熱し溶解させて液体になった金属のこと。例えば、アルミニウム合金の場合、この溶解温度は約 650 ℃であるため、溶解温度よりも 高 い 700 ~ 750 ℃ で溶湯を保温する。
● プレス発表
2014 年 6 月 23 日「溶けたアルミニウムを加熱できる高出力ヒーターを開発」
写真 3.8×3.4 cm
図 1 高熱伝導セラミックフィラー高密度充填の模式図 図2 ヒーター出力試験の測定結果
高熱伝導 セラミックフィラー
アルミニウム溶湯
発熱体 ヒーターチューブ
発熱体
高熱伝導セラミック フィラーの充填
ヒーターチューブ
0
1
2
3
4
5
6
7
8
ヒーター発熱体温度(℃)
750 800 850 900 950 1000 700
ヒーター出力(kW) 開発品
従来品
5倍
チューブ外径: Φ50 mm チューブ内径: Φ40 mm 発熱体長さ: 300 mm

14 産総研 TODAY 2014-11
顕微鏡写真を示します。先端はカーボンナノチューブと同等の曲率をもちますが、基板側に向かうにしたがって太くなり、電界によって生じる力に対する破壊耐性が強い構造となっています。さらに、安定化処理工程およびX線管内部の真空環境を改善したことで、電子源としての出力安定性を向上させました。上記の処理後に1ショット15 mW時の投入電力でX線を発生させて寿命試験を行った結果、1,000万ショットのX線を発生させてもX線出力の再調整が不要なほど安定していることを確認しました。これは、可搬型非破壊検査用X線源としての一般的な使用条件では、10年以上交換せずに使用できる寿命です。
また、このX線源は待機電力が不要で総合的なエネルギー消費が低いことから、USB電源や乾電池でも駆動できます。そのため、商業用電気配線の有無といった場所の制約なしに使用でき、狭い空間などこれまで検査が難しかった現場での非破壊検査が可能となります。さらにミリ秒オーダーのパルスX線を発生でき、動く物の撮影やX線源を移動しながらの撮影も可能です。
今後の予定今後は、X線源の高性能化を行うとともに、
ロボットに搭載した自動検査システムの開発など、効率的な非破壊検査のための研究開発を行っていきます。
X線透過法のニーズと課題高度成長期に建設された建造物の多くは現在
でも使用されており、これらの健全性の診断のため、現場における非破壊検査のニーズが高まっています。例えば、高度成長期に建設・製造された化学プラントや発電所などでは、保温材付きの配管の腐食や減肉が問題となっていて、保温材を取り外さずに配管の腐食などを検査するためX線透過法が用いられています。しかし、これまでのX線源は、サイズが大きい、重量が重い、電源供給用の配線が必要といった制限から現場作業性が悪く、多数の配管が設置されているような狭い空間で使うことは困難でした。
針葉樹型カーボンナノ構造体を用いたX線源そこで私たちは今回、小型軽量な非破壊検査
用パルスX線源を開発しました(図1)。開発したX線管は、針葉樹型カーボンナノ構造体*を用いた電子源に負の高電圧をかけて電界電子放出現象により電子を引き出し、その電子をターゲットに入射させてX線を発生させます。このX線管で瞬間的にキロワットオーダーの強いX線を発生させることで、非破壊検査を行うことができます。今回、管電圧120 kV、厚さ70 mm以下、重さ2.5 kg以下の小型軽量なX線源を実現しました。
図2に針葉樹型カーボンナノ構造体の電子
小型軽量な非破壊検査用パルスX線源プラント配管設置場所などの狭い空間でも撮影可能
加藤 英俊かとう ひでとし
計測フロンティア研究部門陽電子プローブグループ研究員
(つくばセンター)
構造物の非破壊検査、工業製品の検査、医療診断、空港手荷物検査などのさまざまな分野における非破壊検査で使用できる小型軽量な針葉樹型カーボンナノ構造体 X 線源を開発することで、安全安心な社会の実現を目指しています。
関連情報:● 共同研究者
石黒 義久(ライフ技研)、王 波( つ く ば テ ク ノ ロジー)、鈴木 良一(産総研)
● 用語説明
*針葉樹型カーボンナノ構造体:カーボンナノチューブ、カーボンナノウォール、ナノダイヤモンドなど炭素原子で構成されるナノメートルオーダーの構造をもつ物質。
● プレス発表
2014 年 6 月 3 日「 小 型軽量な非破壊検査用パルスX 線源を開発」
● この研究開発は、経済産業省戦略的基盤技術高度化支援事業「『CNX 冷陰極 X線管』特有真空環境の最適化及び X 線発生装置の開発(平成 22 ~ 23 年度)」および独立行政法人 科学技術振興機構の委託事業「A-STEP本格研究開発ステージ実用化挑戦タイプ 小型・軽量可搬型 X 線検査装置(平成24 ~ 26 年度)」の支援を受けて行っています。
写真 3.8×3.4 cm
図 1 パルス X 線源(120 kV)とサイズ比較のための CD ケース(左)と金属製バルブの X 線透過写真(中央:バルブ閉、右:バルブ開)
図 2 針葉樹型カーボンナノ構造体の電子顕微鏡写真

Patent Information
15産総研 TODAY 2014-11
Patent Information のページでは、産総研所有の特許で技術移転可能な案件をもとに紹介しています。産総研の保有する特許等のなかにご興味のある技術がありましたら、知的財産部技術移転室までご遠慮なくご相談下さい。
知的財産部技術移転室〒 305-8568つくば市梅園 1-1-1つくば中央第 2TEL:029-862-6158FAX:029-862-6159E-mail:
高精度な位置合わせが可能な電子デバイス実装技術微細バンプ接続で低温加圧と高い位置合わせ精度を実現
国際公開番号WO2014/045828(国際公開日:2014.3.27)
研究ユニット:
ナノエレクトロニクス研究部門
目的と効果高速・高周波で動作する光・デジタルデバイス
などをパッケージ基板に実装する際に、これまでのワイヤー接続に代えて、金や銅の10−50 µm微細金属バンプによるフリップチップ接続が用いられています。パッケージ基板上のパッド電極にデバイス上のバンプを押し付け、先端を変形させて、接合を形成する必要があります。この工程では、300 ℃以上の加熱と100 gf/バンプ以上の加圧機構、基板・デバイス間の高精度な位置合わせ機構が必要で、デバイス特性の劣化が懸念されていました。また、高精度な位置合わせには、高価格の画像処理・精密駆動機構を用いても時間がかかるため、とても量産性が悪い状況でした。
技術の概要この発明では、通常の位置合わせ精度の量産
用接合装置を用いながら、比較的低温・低加圧で基板とデバイスを高精度に位置合わせして確実に短時間で接続することを目的としています。製作工程を、図 1 に示すように、Ⅰ)基板のパッド電極内に角錐形状の孔を形成、Ⅱ)デバイス上に円柱または円錐形状のバンプを形成、Ⅲ)双
方がはめ合わさるように位置合わせ、Ⅳ)加熱加圧を行うとともに、超音波を印加、Ⅴ)先端の変形、とすることにより、室温から150 ℃の比較的低温・2-15 gf/バンプの低加圧で基板とデバイスを確実に接続することができました。孔とバンプの位置に多少のずれがあっても、最初のコンタクトでは、接触面積がとても少ないため、中心に自動的にスライドして、高精度な位置合わせが実現でき、接触部に圧力が集中するため、先端の変形が促進され、確実な接合形成が確保できます(図 2)。
発明者からのメッセージ通常のシリコン半導体より強度の弱い GaAs や
InP などの化合物半導体を用いたデバイスについても、通常の量産用接合装置を用いて低温・低加圧で接合形成できるため、信頼性の高い実用的な実装が可能となります。将来の小型集積モジュールを実現するための実装技術として、応用展開が期待されます。
適用分野:●光デバイス実装●半導体デバイス実装● 3 次元積層実装
図 2 接合形成後の断面SEM観察写真円柱バンプと角錐孔パッド電極の組み合わせによる10 µm ピッチでの接合配列形成
図1 接合形成プロセスフロー(1)バンプとパッド電極の間隔調整(2)位置ズレ量の計測・位置合わせ(3)バンプとパッド電極のコンタクト(4)自己整合位置合わせ(5)荷重、超音波の印加(6)加圧ヘッドの移動
ボンディングヘッドの高さ
(6)(5)(4)(3)(2)(1)
超音波振動
荷重時間
(c)
(b)
(a)
20 µm
5 µm
10 µm

16 産総研 TODAY 2014-11
Patent Information のページでは、産総研所有の特許で技術移転可能な案件をもとに紹介しています。産総研の保有する特許等のなかにご興味のある技術がありましたら、知的財産部技術移転室までご遠慮なくご相談下さい。
知的財産部技術移転室〒 305-8568つくば市梅園 1-1-1つくば中央第 2TEL:029-862-6158FAX:029-862-6159E-mail:
国際公開番号WO2014/069350(国際公開日:2014.5.8)
研究ユニット:
先進製造プロセス研究部門
レーザー援用インクジェット法低抵抗配線を可能とする工業用インクジェット
適用分野:●エレクトロニクス実装分野●装飾分野●服飾分野
目的と効果この発明は、フレキシブルな材質や表面の粗
さが異なったり、大きな段差があったりするさまざまな形態の基材上に、微細で低抵抗な微細配線、機能材料の微細パターンを高速かつオンデマンドに形成できるインクジェット技術です。これまでの技術ではインクジェットで描画するとインク材が乾燥するまでに濡れ広がり描画線幅が太くなりますが、この発明では、レーザー照射により着弾したインク材を適度に乾燥させ、線幅はインク液滴とほぼ同等、線の厚みは数十~百倍程度に厚くすること(高アスペクト比化)ができます。
技術の概要この発明は、レーザー援用インクジェット法
(LIJ)と呼ばれ、図 1 に示すように基板上をレーザー光であらかじめ局所加熱することで、着弾したインク液滴のレオロジーを制御、インクの濡れ広がりを精密制御することで、図 2 に示すように、
レーザーを照射しない時に比べ、約 250 倍もの高アスペクト比で、10 µm前後までの線幅でスムーズな表面をもった微細描画パターンを形成できます。さらに、表面の荒れた基材にも微細な線幅のパターンが形成できるので、アンカー効果で従来技術より密着力を向上できます。また、吐出インクも金属材料に限らず、無機材料や有機材料でも線幅を狭め厚みを増す効果が得られます。
発明者からのメッセージこの発明は、微細・高アスペクト比をもつ導体
パターンの形成やバンプ形成で、プリンテッドエレクトロニクスデバイスの開発や3 次元的なエレクトロニクス実装技術の開発に役立つと考えられます。また、従来印刷法で形成された線幅 30 µm以下の微細配線パターンなどの修復(リペア)による生産歩留まりの向上にも、かなり実用的な効果が期待できます。
図2 従来インクジェット法と本手法の配線断面の比較
ガラス基板
レーザースポット
インク液滴
インクジェットノズル
インクジェットヘッド
描画方向
描画配線
レーザービーム
レーザーヘッド
レーザー照射によりアスペクト比が250倍以上改善
レーザー照射有りレーザー照射無し
配線厚(µm)
配線幅(µm)
線厚:0.8 µm線幅:230 µm
230 µm
0.8 µm
3002502001501005000
2
4
6
8
10
12
配線厚(µm)
配線幅(µm)
線厚:10 µm線幅:5~10 µm
10 µm
3002502001501005000
2
4
6
8
10
12
焼結前には必ずネックができる。
10 µm
図1 レーザー援用インクジェット法(LIJ)の装置構成

17産総研 TODAY 2014-11
Techno-infrastructure
(2)TSZ0032(国際計量計測用語-基本および一般概念ならびに関連用語(VIM))に基づき、標準の階層の名称を見直しました。
(3)IEC60904-4 で は 上 位 標 準 を“Primary(Secondary)Standard”、基準太陽電池デバイスを“Primary(Secondary)Reference”としています。これに対応する適切な用語がありませんので、TSZ0032の用語を参照し、一次基準太陽電池を“常用参照標準”、二次基準太陽電池を“実用標準”としました。
(4)図の変更を表にも反映させました。(5)物理量を付記しました。(6)IEC60904-4では、トレーサビリティ連鎖
の矢印が上位標準から下位標準へと下向きですが、通常、トレーサビリティ連鎖を書く場合、trace(遡
そきゅう
及)していくことから、矢印の向きを上向きに修正しました。
今後、定格表示値の信頼性に直結する基準太陽電池**の校正のトレーサビリティが明確になるため、適正に校正された基準太陽電池の普及が進み、さまざまな生産国の製品が適切に評価され、世界の太陽電池産業の健全な推進につながることが期待されます。
太陽電池の校正のトレーサビリティ確立方法国際整合化とさらなる技術発展を目指して
JIS C 8904-4の制定の目的および背景太陽電池の定格表示値のトレーサビリティ*
証明は、輸出入における国際整合性の確保や、わが国における太陽光発電補助金制度、再生可能エネルギーの固定価格買い取り制度の要件に深く関わるものです。しかし、2004年に開始された現在の製品認証とその国際相互承認制度は製品の信頼性・安全性は示されていますが、定格表示値の絶対値評価は組み込まれず、トレーサビリティ証明も確認されていませんでした。そのため、生産国によっては定格表示値と実際の出力特性に大きな乖
か い り
離があり、製品全体の信頼性や安全性に影響を及ぼす恐れがありました。
JIS C 8904-4の制定のポイントJISC8904-4「太陽電池デバイス-第4部:校
正のトレーサビリティ確立手順」は、2009年に第1版として発行されたIEC60904-4を手本に、より正確な規格とするために、技術的な内容を組み込んで作成され、2014年8月に制定されました。ポイントは以下のとおりです。
(1)基準計器名称などの区別を、図の形状で判別できるようにしました。
新しく確立した太陽電池のトレーサビリティ連鎖ISO 規格は工業分野の国際規格(電気分野を除く)、IEC 規格は電気分野を扱う国際規格、JIS は日本工業規格。
猪狩 真一いがり さねかず
太陽光発電工学研究センター評価・標準チーム主任研究員
(つくばセンター)
一般財団法人日本品質保証機構(JQA)で太陽電池の性能・信頼性評価法の研究開発に従事しました。この間、NEDO、PVTEC、OITDA、JWTC などの関連委員会で IEC/JIS 標準化に寄与しました。一般財団法人日本エネルギー経済研究所国際プロジェクト研究員を兼任し、中国科学院電工研究所に技術移転の指導を行った後、JQA ISO 審査本部を経て 2004 年に産総研に入所しました。太陽電池の性能・信頼性評価の研究を中心に、成果の国際普及に努めています。
NMIJ
WMO NMIJ
SI Radiometric Scale
SiPD Spectral Irradiance Scale
World Radiometric Reference
国際単位系(SI)IEC 60904-4 / JIS C 8904-4
黒体放射炉
分光感度測定装置
絶対分光放射計
ソーラーシミュレーター
絶対放射計
一次標準
IPC
二次標準
IEC 60904-2 /JIS C 8904-2
JIS C 8910産総研 一次基準セル 常用参照標準
認証機関・試験事業所
太陽電池メーカー
ユーザー
二次基準セル 二次基準モジュール
実用標準
製品(太陽電池)
(JET,TUV ,ULなど)
IECEE-PV
ISO9000s / JIS Q 8901
IEC 60904-2 /JIS C 8904-2
品質管理(出荷検査)
第三者測定・製品認証
ISO/IEC 17025
関連情報:● 用語説明
*トレーサビリティ:計測結果が基準(国際標準または国家標準)から(切れ目のない)校正の連鎖を通して結び付いていること。
**基準太陽電池:太陽電池の測定に当たり、測定用光源の放射照度を基準光換算で決定するために使用する太陽電池。基準太陽電池セルと基準太陽電池モジュールに大別される。

18 産総研 TODAY 2014-11
新井 健太あらい けんた
計量標準管理センター標準供給保証室総括主幹
(兼)計測標準研究部門力学計測科圧力真空標準研究室付
(つくばセンター)
漏れの大きさを定量化するための研究開発を行っています。漏れ検査は、重要な非破壊検査でありながら経験が重要視される検査の一つです。漏れ検査の技能についてわが国でも資格者制度が発足したように、正確な漏れ検査が社会的に求められるようになってきました。今回開発した精密流量計を用いて漏れ検査にまつわるさまざまな経験則を定量的に明らかにし、漏れの大きさを正確に測定できる環境作りに貢献したいと考えています。
気体流量を求めるという、圧力上昇法です。大気圧下の圧力変化を高精度に測定するために差圧計を使用し、装置全体の温度を安定化させるために主要部分を恒温槽内に設置します。さらに差圧に応じた差圧計内部の容積変化量を精密測定[1]して補正に用いることで、大気中へ5×10-7Pam3/s ~ 1×10-4Pam3/sの気体流量で排出される標準リークを、世界最高レベルの精度で校正できる精密流量計を開発しました[2](図2)。開発した精密流量計の国際整合性は、国際比較CCM.P-K12においてすでに国際整合性が確認された他の精密流量計[3]との比較によって確認しました。
今後の展望今回整備した精密流量計の漏れ量校正範囲
は、細菌やウィルスが侵入できないほどの小さな孔から漏れ出る極微量の気体流量に相当します。このような漏れが問題になる機器は、エアコン・空調機器以外にも、自動車などの燃料タンク(ガソリンや水素)、ラジエーター、ペースメーカー、内視鏡など私たちの身近にもたくさんあります。これら機器についても国家標準を基準にした正確な漏れ検査が行われるようになることで、私たちの安心・安全や地球の環境保全に貢献できると考えています。
精密流量計—大気圧中への漏れ検査の国家標準—地球温暖化対策から自動車、医療機器まで
地球温暖化対策としてみた漏れ検査の重要性地球温暖化対策の一環として、フロン回収・
破壊法が2013年に改正され、その柱の一つに業務用空調機器の冷媒適正管理が盛り込まれました。大気中へのフロンガス排出量を低減させるためには、冷凍空調機器の施工・点検時の漏れ検査が重要であり、気体流量に換算して5g/年
(約3×10-6Pam3/s)でフロンガスが漏れる孔あな
の検出が求められています。中でも「スニファー法*」は極めて有効です。技術の進歩により検出器の感度の安定性は向上してきたものの、いまだに改善の余地があります。そのため、既知の微量ガスを常に排出する標準リーク**を用いて検出器の感度を定期的に確認することで、正確な漏れ検査ができるようになります(図1)。産総研計量標準総合センター(NMIJ)では、標準リークから排出される気体流量を校正するための精密流量計(大気中への漏れの国家標準)を開発し、気体流量で表した漏れの大きさをトレーサブルに測定できる設備を整えました(図2)。同様の標準は、すでにドイツ、フランス、イタリア、チェコでも開発済みであり、アジア太平洋地域では日本が初めてになります。
大気圧下の極微量な気体流量測定標準リークの校正方法は、容器に気体を流入
させたときの単位時間当たりの圧力上昇量から
図1 スニファー法による漏れ検査の概要 図2 精密流量計全体写真(左)、恒温槽内部(右)
フロンガスの漏れ
漏れ検査
フロンガス
標準リーク吸引プローブ
スニファー法漏れ検出器
08.0
関連情報:● 参考文献
[1]K. Arai et al.: Measurement, 48, 149-154 (2014).
[2]K. Arai et al.: Metrologia, 51, 522-527 (2014).
[3] 新井 健太 : 産総研 TODAY, 9(9), 20(2009).
● 用語説明*スニファー法:検査対象の内部を気体で加圧して漏れを見つける試験。例えばエアコンでは冷媒として充填されているフロンガスを用いる(図1)。
**標準リーク:リークマスタ、標準漏れ器とも呼ばれる。流路の狭窄や石英中をヘリウムが透過する現象を利用して、一定かつ微量な気体流量を発生させる器具。検査対象に応じて、さまざまな気体種の標準リークが市販されている。寸法などから発生流量を計算することはできないため、一つ一つの標準リークについて発生流量の校正が必須である。

19産総研 TODAY 2014-11
Techno-infrastructure
な投影を行うため、立体模型上に造型した微細な等高線に模型と同じデータから作成した等高線の画像をプロジェクションマッピングしてマッチングを行うことで、画像の傾きや歪みの補正を行い、投影精度を向上させます。模型はケミカルウッドと呼ばれる低コストかつ軽量で強度のある素材で造型されているため、ユーザーが模型の損壊を気にせず模型を触りながら観察(触察)することが可能です。こうした触察と、音声による解説を併用し、視覚障害のある方々への展示も行っています。また投影用の機材は市販品によって構成できるため、模型一式を容易に製造できます。これらの特性を活かし、現在は各地の巡回展示や、学校における科学教育・防災教育などに活用されています。
今後の展望現在、ボーリングや反射法地震探査などの
データを利用し、地層の積み重なりを表現できる積層型の模型を試作済みです(特願2013-184973、立体地質模型システム)。今後も、これら立体地質模型システムを研究成果の可視化やアウトリーチに活用し、地質情報のさらなる普及につなげたいと考えています。
精密模型による地質情報の立体化技術精密三次元造型とプロジェクションマッピングの連携
概要地質標本館では、地質図などさまざまな地質
情報の展示を行っています。しかし図面を判読して地形や地質の立体的なイメージを思い浮かべることは容易ではありません。そこで、地質情報をより直感的に理解できる展示物として、三次元造型機とプロジェクションマッピング
(画像投影)を応用した立体地質図を開発しました。
開発の内容と成果この技術はプロジェクションマッピングに適
した模型を造型し、地質図をはじめとするデジタル画像や映像を正確に投影するためのもので、以下の技術を含んでいます。・三次元造型機(3Dプロッター・3Dプリン
ターなど)を用いた高詳細な模型の造型法・プロジェクションマッピング時の高精度な位
置合わせ法模型を作るためのデータは、国土地理院発行
の数値地図などの数値標高モデルを利用します。このデータに位置合わせ用の情報(等高線などの立体形状)を付加したのち、立体模型に加工します。
次に模型の表面に画像を投影します。これまでのプロジェクションマッピング法よりも精密
図 1 3D プロッター(切削式の三次元造型機)で出力した模型の一例(筑波山、模型寸法約 30×30 cm、縮尺約 1/40,000、垂直方向を約 1.3 倍に誇張)。使用データは国土地理院基盤地図情報 5 m メッシュ。
図 2 プロジェクターによって模型表面に地質図の画像を精密投影した様子。投影に使用した地質図は 5 万分の 1 地質図「真壁」(宮崎ほか、1996)。
芝原 暁彦しばはら あきひこ
地質標本館 企画運営グループテクニカルスタッフ
(つくばセンター)
地質標本館にて化石をはじめとした地質情報全般の普及活動を進めるとともに、3D プリンター・3D プロッターなどの三次元造型技術を応用した地質情報の可視化技術の確立と、それらを用いた地質情報のより広範なアウトリーチに努めています。またプロジェクションマッピングに代表される次世代型可視化技術との連携なども行っています。
関連情報:● 参考文献
宮崎 一博 他: 5 万分の 1 地質図幅「真壁」, 103, 地質調査所 (1996).
● 公開番号
特開 2014-032304発明の名称:情報処理装置、情報処理方法及びプログラム
● この模型システムは、地形や地質に関するオープンデータの「見える化」に適した手段であるとして、国土地理院
(国土交通省)が主催する「G空間 EXPO2013 Geo アクティビティフェスタ」にて優秀賞を受賞しました。
(GSJ 研 究 紹 介、https://www.gsj.jp/researches/t o p i c s / t o p i c 2 0 1 4 -gexpo2013geo.html)
精密流量計—大気圧中への漏れ検査の国家標準—

今年の関西センター一般公開は、尼崎支所で開催しました。日本技術士会や大阪科学技術館などの他機関から出展支援、関西センターの研究成果や尼崎支所の歴史の展示、例年より科学教室や工作教室などの出展を増やすなどバリエーションを豊富にしたことにより、過去最高の710名の方に来場していただきました。来場した子供に喜んでもらっただけではなく、大人も楽しめましたというコメントをたくさんいただきました。
北海道経済産業局に特許紹介コーナーを出展していただきました。また、産総研国際標準推進部が「標準って何だろう」コーナーを出展しました。
水素発生実験、燃料電池からメダカまで、関西センターの多彩な研究を紹介しました。自分で組み立てた燃料電池でも発電できたかな? メダカの親子の色は遺伝で決まるのか? みんな興味津々で実験中です。
関西センター
北海道センター
産総 研今年も全国各地の産総研で「一般公開」を開催しています。関西センター尼崎支所(8 月 1 日)、北海道センター(8月2日)、中部センター(8月2日)、福島再生可能エネルギー研究所(8月3日)、中国センター(8月26日)、四国センター(8月
「地震と津波の話」と「無重力を体感しよう」は関西センター一般公開の定番教室。
アザラシ型ロボット「パロ」はどこでも大人気。
正しくはかる長さと重さと温度。ピッタリ100gでビンゴ!
自分で作った分光器で、いろいろな光源を見てみよう!
北海道センター一般公開は天気に恵まれ 411 名の来場があり、大人から子供まで科学を楽しんでいただきました。
料理は科学だ! 今日の料理は温泉卵とチーズです。
技術士による科学・工作教室では、スパイラルモーターがうまく回らず苦戦中。大阪科学技術館おもしろ実験ショーのテーマは大気圧。大気圧ってこんなに力が強いの!
何が見えたかな?
筋電にチャレンジ!
ラボツアー (生物プロセス研究部門、メタンハイドレート研究センター )では一般の方が普段は入れない実験室を公開し、好評でした。
「あなたも染め物師」藍染めでオリジナルハンカチを作りました。
今年も大人気のはんこ名人とスライム作り。
大人に大好評の血管年齢測定コーナーでした。

中部センターでは、なごやサイエンスパークに集積された研究機関などと連携し「なごや・サイエンス・ひろば 2014」として一般公開を開催しました。天候にも恵まれ2,727名の皆さまにご来場いただき、大変盛況のうちに開催を終えることができました。
中部センター
福島再生可能エネルギー研究所
産総 研29日)での体験コーナー、展示コーナーなどをご報告いたします。産総研が行っている最先端の研究成果をご覧いただき、お子さまから大人まで、科学の楽しさにふれていただきました。
工作教室「液体万華鏡と立体万華鏡」、「石こうでかたちを作ってみよう」は今年も大好評でした。お父さんお母さんの応援を受けて今年も思い出の作品が完成しました。
子ども研究室体験では、白衣に防護メガネを使用したり、実験室での体験に真剣な表情で取り組みました。
光の不思議な性質を学習して、光を自由にコントロールする実験をしました。
果物や飲料食品を使った電池作りを通して、電池の仕組みを体験しました。
ワイングラスを使ってお馴染みの童謡が上手に演奏できました。
大きなキツネの風船が目印の会場入り口。
いろいろな磁石の種類を使って、磁石の力を確かめました。
今年 4 月に開所した福島再生可能エネルギー研究所(FREA)を地元の皆さまに見ていただく機会として、研究所見学ツアーを中心とした一般公開を行いました。夏の日差しの下、292名の皆さまにお越しいただきました。
班に分かれて研究所見学ツア ー を 行 い ま し た。 実 証フィールドに向かいます。
再生可能エネルギーを身近に感じてもらうための実験装置も展示しました。
地元企業との共同研究の説明パネル。復興への貢献は FREA の大きな使命です。
見学ツアーの後は風車や紫外線ビーズの工作も楽しみました。 交流事業中の鳥取市と郡山市の小学生が訪問しました。
実証フィールドにあるエネルギー管理棟屋上からは、風車や太陽光パネルがよく見えます。
40 キロメートル離れた会津大学との間でデータを通信して機器をコントロールするデモンストレーションを行いました。
現場の研究者が研究内容や実験設備を説明しました。
「パロ」はここでも人気者です。

中国センター
四国センター
毎年恒例の四国センター一般公開を開催しました。今年は、阿南工業高等専門学校、香川高等専門学校、高知工業高等専門学校、観音寺第一高等学校などから出展支援をいただき、255名の方に科学の不思議や面白さを体験していただきました。
今年も、広島中央サイエンスパーク施設公開に合わせて中国センター一般公開を開催しました。今回は、初めて夏休み中の開催となり、真夏の開催で熱中症などの心配もありましたが、親子連れや地元の高校生を含め699名の方々にご来場いただきました。
「不思議なコマ」白黒の図柄だけなのに、回転させると色々な色が見える「コマ」作りに挑戦!
「ダイラタンシー」見た目は液体なのに、手を入れて力を加えると硬くなった。あら、不思議!
「偏光万華鏡」紙コップに偏光板を貼り合わせて、オリジナルの万華鏡を作りました。きれいな色が見えたかな?
「チリモン」海のちりめんモンスター探し、今年も好評。みんな、真剣にチリモンを探していたよ!
「ミクロの世界」かわいいトンボも、顕微鏡でのぞくと大きくて怖い感じ!
「ジャンボシャボン玉」シャボン玉の中に入ったよ! このまま飛んでいけたら楽しいだろうなぁ?
「標準ってなんだろう?」紙テープを切って、1mの長さをうまく当てられるかなぁ?
「チョロメテ」みためかわいい。でも、小さいのにとても重たいよ。
「英語発声ティーチング」上手に英語の発声ができたよ!
顕微鏡でウミホタルを観察中。
「パロ」をだっこして記念撮影。
「技術者・研究者をめざそう」のコーナーでは、科学の面白さや魅力などをわかりやすく紹介し、科学や研究が皆さまの身近にあることを感じていただきました。また阿南工業高等専門学校、香川高等専門学校、高知工業高等専門学校の理系女子のみなさんによるポスター発表を行いました。
観音寺第一高等学校による科学体験コーナー。ブロッコリーのDNA観察やラテックス液と酢を利用してのゴムボール作成を体験しました。
「不思議なモノをつくろう」と題した工作コーナーでは、紫外線にあてると色の変わるビーズを使ったストラップ、目の錯覚を応用した不思議なコマを作りました。
「体の状態をはかろう」のコーナーではスタンプラリー形式で、①血管年齢、②精神疲労、③脚筋力、④上体の柔軟性、⑤平衡性などの測定を行いました。

23産総研 TODAY 2014-11
AIST Network
日本学術振興会は、わが国の学術研究の将来を担う創造性に富んだ研究者の育成・確保を目的として、大学院博士課程在学者および大学院博士課程修了者などで、優れた研究能力をもち、大学その他の研究機関で研究に専念することを希望する者を、特別研究員として約2,500名採用(2014年度実績)し、研究奨励金を支給しています。産総研は、2014年9月現在、そのうちの13名の特別研究員を受け入れています。
特別研究員の選考は、特別研究員等
審査会(委員55名、専門委員約1,800名)による書面審査および面接審査により行われています。日本学術振興会は、2009年度より、書面審査において有意義な審査意見を付した任期2年目の専門委員(900名)を対象に選考を行い、表彰を実施しています。
産総研からも毎年十名程度が専門委員に就任し、適正・公平な審査に貢献していますが、このたび、産総研から初めて、知能システム研究部門の喜多泰代上級主任研究員が表彰されました。
日本学術振興会特別研究員の適正な審査への貢献
2014 年 9 月 19 日、中鉢理事長から喜多上級主任研究員に表彰状が手交されました。
産総研は、今後も特別研究員の審査への貢献などを通じて、わが国の科学技術の発展に寄与していきます。
イベントの詳細と最新情報は、産総研のウェブサイト(イベント・講演会情報)に掲載しています http://www.aist.go.jp/
10月14日現在 EVENT Calendar 2014年11月 2014年12月
期間 件名 開催地 問い合わせ先
11 November
6〜7日 The Irago Conference 2014 つくば 0532-81-5133
7〜9日 サイエンスアゴラ2014 東京 03-5214-7493
8〜9日 産総研一般公開(臨海副都心センター) 東京 03-3599-8983
8〜11日 溶液化学シンポジウム つくば 029-861-8088
11日 国際標準推進戦略シンポジウム 東京 029-862-6221
11〜12日 IEC 東京大会技術展示会 東京 03-4231-8520
22〜23日 日本トレーニング科学会大会 東京 03-3599-8918
25日 エネルギー技術シンポジウム 2014 東京 [email protected]
12 December
27日 九州・沖縄 産業技術オープンデー 鳥栖 0942-81-3606
● 特別企画「健康寿命世界一の産総研村へようこそ」
—楽しむ、感じる、測る、続ける—・イベント広場(休日は楽しくダンス、日々
のゴミ拾いで村はきれい ほか)・健康コンビニ(血液翻訳、無農薬野菜、健
康相談 ほか)・リハビリステーション(100 m走行計、ア
シストロボット ほか)
11月8日〜9日 臨海副都心センター
● 工作教室・紫外線ビーズストラップ・偏光万華鏡
● 体験コーナー・ノボレオンでクライマー体験・チョロメテ2(ミニ人型ロボット)・はんこ名人・スピーチジャマー体験
・パロと遊ぼう・筋電スイッチ・マイクロフォンアレイ
当日同地区では、サイエンスアゴラ2014、セーフティグッズフェアも開催しています。
10時00分〜17時00分(最終受付:16時30分)問い合わせ:臨海副都心センター TEL:03-3599-8983
産総研一般公開のお知らせ

産 総 研 人
2014 November Vol.14 No.11
(通巻166号)平成26年11月1日発行
AIST11-E00002-40
カーボンナノチューブ(CNT)は優れた物性により、デバイスや樹脂複合材をはじめ、さまざまな用途への応用が期待されています。しかし生産コストが高いために産業利用には至っていません。そこでナノチューブ応用研究センターでは、CNTの産業化を目指し、生産コストの低減と用途開拓に取り組んでいます。その中でもCNT用途開発チームでは、CNTとゴムや金属といった異種材料とを組み合わせることで、従来材料を凌駕した高機能性をもつ複合材料の開発や、それを応用したデバイス・MEMS開発を行っています。関口貴子研究員は、CNT・ゴム・ゲルという柔らかい材料を使ったトランジスタの開発に取り組んでいます。
カーボンナノチューブをゴムや金属と複合化しデバイス開発に活かすナノチューブ応用研究センター CNT用途開発チーム 関
せきぐち
口 貴あ つ こ
子(つくばセンター)
関口さんからひとことゴムのような柔らかい材料の精密加工は困難で、従来の技術では、柔らかい材料だけで
電極を加工し、トランジスタを組み立てることはできませんでした。私は、ゴムにCNTを添加するとマイクロスケールの高精緻加工が可能であることを見いだし、この技術をベースに、柔らかいトランジスタを完成させました。柔らかいトランジスタは、医療用の健康モニタリングデバイスとしての応用が期待されます。また2013年からは、CNTと銅の複合材料の開発に携わっています。この材料は銅の高導電性を維持したまま、軽量化や熱的安定性の向上が図れる材料であり、自動車の配線部材などへの応用が期待されます。より身近な製品にまでCNTが使われるよう、CNTの特徴を活かした独自性の高い技術の開発に励んでいきたいと思います。
実験室にて
編集・発行 独立行政法人産業技術総合研究所 問い合わせ 広報部広報制作室 〒305-8568 つくば市梅園1-1-1 中央第2 Tel:029-862-6217 Fax:029-862-6212 E-mail:ホームページ http://www.aist.go.jp/● 本誌掲載記事の無断転載を禁じます。● 所外からの寄稿や発言内容は、必ずしも当所の見解を表明しているわけではありません。