Embed Size (px)
Citation preview

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Navegacion AereaTema 1: Geodesia. Cartografıa. Sistemas de referencia.
Tiempos.
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Geodesia
Geodesia: Ciencia que se ocupa de la forma, medida yrepresentacion de la Tierra y de su campo gravitatorio.Tambien estudia otros fenomenos, como por ejemplo elmovimiento de las placas tectonicas, la rotacion de la Tierra,el desplazamiento de los Polos o las mareas.
Forma de la Tierra: Se plantean modelos locales(utiles para una cierta region, como por ejemplo oun paıs) o globales.
Medida de la Tierra: A pequena escala (topografıa:estudios geodesicos, triangulaciones geodesicas conteodolitos), o a gran escala (radio de la Tierra,aplanamiento, etc...).
Representacion de la Tierra: En este aspecto,ıntimamente ligada a la cartografıa.
Campo gravitatorio de la Tierra: en este aspecto sedenomina geodesia fısica (rotacion, mareas,densidad de las capas de la Tierra...). 2 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelos de Tierra en la Antiguedad
En tiempos antiguos (primeras civilizaciones), losdesplazamientos eran muy cortos y por tanto el efecto de lacurvatura muy poco apreciable.
Por tanto, tıpicamente se asumıa un modelo de Tierra plana1.
No obstante ya habıa algunos efectosapreciables para una mente observadora:
En un eclipse de Luna, la sombra de laTierra es circular (¿y si la Tierra fuera undisco?).Cuando un barco se adentra en el mar, loultimo que desaparece son las velas!
Los griegos fueron los primeros en proponerotro modelo de Tierra diferente: una Tierraesferica.
1Aun existe quien ası lo piensa, p.ej. los miembros de la Flat Earth Society.3 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelos de Tierra en la Antiguedad
Los griegos eligieron una esfera por coherencia con lasobservaciones, pero sobre todo por motivos filosoficos: laesfera es el solido mas perfecto.Entre otros, argumentaron que la Tierra era una esferaPitagoras, Aristoteles, Platon o Arquımedes.
El primero en estimar la circunferencia de laesfera terrestre fue Eratostenes, alrededordel ano 240 A.C.
Eratostenes de Cirene era un matematico,poeta, atleta, geografo y astronomo griego.
Tambien estimo la inclinacion del eje de laTierra con respecto a la eclıptica (planodonde orbita la Tierra en torno al Sol), y sele atribuye estimar la distancia Tierra-Sol yla invencion del ano bisiesto. 4 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Midiendo la circunferencia de la Tierra
Eratostenes uso trigonometrıa para medir el radio de la Tierra,supuesta esta esferica (el radio real es aproximadamente 6370kilometros).En Asuan, durante el Solsticio de Verano, el Sol se encontrabatotalmente vertical. ¿Que es el Solsticio de Verano yque implica que el Sol este vertical?
El mismo dıa, en Alejandrıa, un obeliscoproyectaba una sombra de angulo 7,12o.
Eratostenes sabıa que la distancia entreAlejandrıa y Asuan era de unos 5000estadios.
En unidades modernas, 1 estadio = 157.5metros.
Ejercicio: Reproducir el calculo deEratostenes. 5 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelo de Tierra esferico
Posteriormente Ptolomeo (en el siglo II D.C.) estimo elperımetro de la Tierra en 29000 kilometros (realmente sonunos 40000 kilometros). Dado el prestigio de Ptolomeo, estaestimacion se mantuvo durante la Edad Media y Renacimientoy fue la utilizada por Colon para planear su viaje a las Indias.
Si la Tierra es esferica, se pueden definirlatitud, longitud, meridianos y paralelos.
¿Cual es la latitud y longitud de Sevilla?
¿que longitud tiene un cierto arco dadosobre un meridiano? ¿y sobre un paralelo?
Tomando el radio de la Tierra como 6366.7kilometros, ¿que longitud cubre un minutode arco de meridiano? (1’=1/60 grados)
6 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelo de Tierra elipsoidal
Cassini (Francia, s.XVIII) midio con precision un arco demeridiano y observo el siguiente fenomeno: tomando comoreferencia Parıs, 1 grado de arco medido hacia el Norte eramas largo que un grado de arco medido hacia el Sur.
Para resolver la discrepancia, propuso unmodelo elipsoidal (de revolucion) de laTierra, de forma que el radio en el Polo esmayor que el radio en el Ecuador.
Huygens y Newton habıan propuestodecadas atras el modelo opuesto, unelipsoide de revolucion con mayor radio en elEcuador que en el Polo.
El asunto se convertio en una cuestion deorgullo nacional, Francia vs. Gran Bretana.
7 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
La geodesia en tiempos modernos
La academia de Ciencias francesa mando una expedicion aregiones polares para hacer medidas mas precisas.Las medidas dieron la razon a los ingleses.Este fue el primer avance importante en geodesia en casi 20siglos.
En el siglo XIX, la geodesia aparece comociencia independiente gracias a lascontribuciones de Bessel, Gauss, etc...
En tiempos modernos, la geodesia haexperimentado un nuevo auge gracias a laexploracion del espacio.
Sistemas basados en satelites como GPS yotros permiten determinar medidasgeodeticas con una precision antesinalcanzable. 8 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelos de Tierra
Dependiendo del objetivo que se pretende alcanzar, endiferentes disciplinas se pueden emplear diferentes modelos deTierra.En estudios simplificados y locales se puede usar Tierra plana(p. ej. en Mecanica del Vuelo).En el otro extremo esta la superficie topografica de la Tierra:es la forma real de la Tierra, pero para poder usarla hacenfalta infinitos puntos: no es practica en la mayor parte de loscasos.Otra posibilidad es definir una superficie ideal, matematica, dereferencia, admitiendo que la Tierra “se parece” a pero no esexactamente dicha superficie. Hay dos posibilidades:
Esfera: mas simple pero menos precisa.Elipsoide de revolucion achatado en los polos.
Finalmente, el geoide es una superficie compleja que aproximabien la topografica, definida en base al modelo geopotencial(gravitatorio y de rotacion terrestre). 9 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Elipsoides de referencia
Puesto que la Tierra tiene una forma aproximadamenteelipsoidal, este modelo tiene el merito de ser losuficientemente simple como para ser manejable y losuficientemente preciso como para ser util en la practica.
Para definir un elipsoide son necesarios dos parametros:re = semieje ecuatorial (mayor) [a veces llamado a].rp = semieje polar (menor) [a veces llamado b].
Tıpicamente no se emplea b, sino que seutiliza el “factor de achatamiento” o deaplanamiento (flattening): f = 1! rp/re .
En tablas se suele dar mas bien 1/f .
Otra alternativa a f es la excentricidade =
√1! r2
p/r2e .
10 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Elipsoides de referencia
Existen muchos elipsoides definidos, que aproximan mejordiferentes zonas de la Tierra.
Es sencillo convertir coordenadas de un elipsoide a otro.
En la actualidad ha emergido un estandarcomunmente aceptado en todo el mundo.
Se denomina Elipsoide Internacional deReferencia WGS84.
Para el WGS84, re = 6378,137 kilometros y1/f = 298,257224.
El uso del WGS84 se debe a que esempleado por los satelites GPS; todos losreceptores GPS trabajan con coordenadasdefinidas por el elipsoide WGS84.
11 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Otros elipsoides de referencia
Ejemplos de otros elipsoides de referencia:
En Espana hasta hace poco se usaba el ED50, basado en elInternacional, pero ahora se usa el GRS80, que es equivalente(por milımetros) al WGS84.
12 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Sistema Geografico de referencia
Tambien llamado ejes Tierra o ECEF (EarthCentered, Earth Fixed).
Ligado a la Tierra, rota con ella.
Util para referenciar posiciones en toda laTierra.
Coordenadas cartesianas:xECEF = [xECEF yECEF zECEF]T.
El plano Oxey e contiene al Ecuador y elplano Oxeze al Meridiano de Greenwich.
La forma de la Tierra se asimila al elipsoideWGS84.
13 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Coordenadas geodeticas o geodesicas
Un punto queda determinado por sualtitud h, latitud geodesica ! y longitudgeodesica ".
Observese que h mide la altitud sobreuna perpendicular al suelo (verticallocal) que no coincide en general conuna lınea que una el punto con elcentro de la Tierra.
Relacion con las coordenadas cartesianas:
xECEF =
h +
rep1 ! f (2 ! f ) sen2 !
!cos ! cos " =
h +
rep1 ! e2 sen2 !
!cos ! cos ",
yECEF =
h +
rep1 ! f (2 ! f ) sen2 !
!cos ! sen " =
h +
rep1 ! e2 sen2 !
!cos ! sen ",
zECEF =
h +
re (1 ! f )2p
1 ! f (2 ! f ) sen2 !
!sen ! =
h +
re (1 ! e2)p
1 ! e2 sen2 !
!sen !.
14 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Coordenadas geocentricas
Tambien se pueden emplear coordenadasesfericas tradicionales:Un punto P quedadeterminado por el radio r (medido desde elcentro de la Tierra), la latitud geocentrica !C yla longitud geocentrica "C .
Es evidente que "C = ", al ser el elipsoide derevolucion. No obstante, ! "= !C .
En la figura se ha elegido un meridiano # por elque se ha “cortado” el elipsoide.
Usando la figura se pueden demostrar lasformulas de la anterior transparencia.
Relacion con las coordenadas cartesianas:
xECEF = r cos !C cos "C , r =q
(xECEF)2 + (yECEF)2 + (zECEF)2,
yECEF = r cos !C sen "C , tan "C = yECEF
xECEF ,
zECEF = r sen !C , tan !C = zECEFq
(xECEF)2+(yECEF)2.
15 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Pasar de coordenadas cartesianas a geodesicas
Dadas las coordenadas geodesicas, es inmediato obtener lascoordenadas xECEF.
El procedimiento inverso ha de hacerse numericamente.Unicamente se puede calcular con facilidad " detan" = xECEF
yECEF .
Para ello conviene definir la funcion N(!) = re#1−e2 sen2 φ
y
escribir p =√
(xECEF)2 + (yECEF)2.
1 Asumir h0 = 0. Entonces tan !0 = zECEF
p(1−e2) .
2 Iterar para i = 0, 1, . . .:a Calcular Ni = re#
1!e2 sen2 !i
.
b Calcular hi+1 = pcos !i
! Ni .
c Calcular !i+1 de tan!i+1 = zECEF
p“1!e2 Ni
Ni +hi+1
” . Volver a (a).
3 Parar cuando el procedimiento iterativo converja.16 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Sistema de referencia local y radios de curvatura
En la figura se ve un sistema de ejesdefinido localmente, llamado NED:North-East-Down.
Coincide con el sistema definido por lascoordenadas curvilineas !, ", h, deforma que N=eφ, E=eλ, D=eh.
Dicho sistema es fundamental ennavegacion aerea, a veces se llama“navigation frame”.
El radio de curvatura del elipsoide a lo largo de un meridiano
(" =cte) es Rmer = re(1−e2)(1−e2 sen2 φ)3/2 .
El radio de curvatura del elipsoide a lo largo de un paralelo
(! =cte) esRnormal
cos !, donde Rnormal = re#
1−e2 sen2 φ.
17 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Modelos gravitatorios
Si la Tierra fuera una esfera perfecta, homogenea por capasesfericas (como una cebolla), la aceleracion de la gravedad g
serıa igual a G = !µe
r3 r , donde r = xECEF.
En realidad, se tiene que G = G (r , ",!).
Para estudiar G es mas sencillo usar un potencial UG yutilizar coordenadas geocentricas r , "C , !C .
Por tanto G = $UG , es decir, en esfericas:G = ∂UG
∂r er + 1r
∂UG
∂φCeφC
+ 1r cos λC
∂UG
∂λCeλC
.
Modelo esferico: UG = µer .
Modelo elipsoidal (J2):
UG = µer
[1 + J2
2
(rer
)2(1! 3 sen2 !C )
], donde J2 es un
coeficiente.
Modelo EGM96: hasta 360 terminos realizando correcionespor la forma de la Tierra y la distribucion masica.
18 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
La rotacion de la Tierra
La Tierra rota con una velocidad $e en torno al eje ze . Puestoque los ejes ECEF son solidarios con la Tierra, en dichos ejeshay que anadir las fuerzas de inercia ficticias.
Concretamente aparece una aceleracion centrıfuga, dada poracent = !$e % ($e % xECEF).
Se tiene que acent = !$2e
[xECEF yECEF 0
]T.
Si escribimos Uω = ω2e r
2 cos2 φC2 , se tiene que acent = $Uω.
Notese que desde el punto de vista de un observador, laaceleracion centrıfuga es completamente indistinguible de lagravitatoria.
19 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
El geopotencial
Por tanto a todos los efectos se puede sumar la aceleracioncentrıfuga a la gravitatoria, y considerar la suma como la“gravedad sentida” g .
Se tiene por tanto g = G + acent .
A nivel de potenciales, Ug = UG + Uω.
La funcion Ug se denomina geopotencial.
Observese que esta misma operacion no se puede realizar conla otra fuerza de inercia producto de la no inercialidad delsistema de referencia ECEF, que es la fuerza de Coriolis.
20 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
El geoide
El geopotencial se utiliza para definir el geoide, una superficieque aproxima la forma verdadera de la Tierra.Se define el geoide como la superficie equipotencial (conrespecto al geopotencial Ug ) que mejor aproxima (en elsentido de mınimos cuadrados) el nivel medio del mar global.
Un geoide (exagerado).
Con los modelos gravitatorios antesexpuestos:
1 Si se considera la gravedad de una esfera yse desprecia la rotacion de la Tierra, setiene que el geoide es una esfera.
2 Si se considera la gravedad con el modeloJ2 (de un elipsoide) y con la rotacion de laTierra, se obtiene el elipsoide WGS84.
3 Si se considera el modelo completo degravedad EGM96 se obitene el llamadogeoide EGM96.
21 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
El geoide
En las figuras se puede ver la relacion entre la superficie de laTierra (topografica), el geoide, y el elipsoide.Se define N como la undulacion del geoide. Se tieneN & 100 m. En la figura de la izquierda aparece la altura
elipsoidal (como h) y la altura ortometrica oelevacion geoidal (como H).
La altura AGL hAGL es la distancia hasta lasuperficie, y se define como la altitud menosla altura elipsoidal.
Un modelo de terreno vendra dado comouna funcion que da la altura elipsoidaldependiendo de los valores de " y !. 22 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Otros modelos gravitatorios de referencia
Para simplificar, en ocasiones se usan otros modelos massimples de gravedad, p.ej. gravedad constante. No obstante, sise quiere una gran precision habra que utilizar el modelo mascomplejo disponible.La mayor parte de los sistemas de navegacion empleanmodelos simplificados, donde se define g como un escalar yluego se escribe gn = [0 0 g ], donde n es el sistema dereferencia NED (luego D es “hacia abajo”).Nosotros usaremos g = µe
(re+h)2 .
El WGS84 define un modelo simplificado con algunoscoeficientes (no lo usaremos).Puesto que el modelo no es correcto, se debe incluir laposibilidad de que tenga errores (anomalıas gravitatorias):gn = [%g ! &g g ], donde % y & son pequenos angulos, que semantendran constantes en pequenas distancias.
23 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
La geodesia a traves de la HistoriaModelos de TierraModelos gravitatorios de la Tierra
Lınea de plomada y deflexion vertical
La linea de plomada o vertical astronomicaes perpendicular al geoide, y es hacia dondeen la realidad se dirige g .
La linea perpendicular al elipsoide es haciadonde se dirige g segun el modelo de laanterior transparencia.
La diferencia entre ambas es la llamada“deflexion vertical”.
24 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Cartografıa
Cartografıa: es la disciplina que estudia la teorıa y laconfeccion de mapas geograficos y cartas.Para ello combina ciencia, tecnica e incluso estetica, partiendode la premisa de que se puede comunicar informaciongeografica de forma efectiva modelando adecuadamente larealidad fısica.
Los principales problemas que encuentra lacartografıa son:
Seleccionar los aspectos geograficos que semuestran en una representacion.Eliminar la complejidad innecesaria oirrelevante contenida en una representacion.Combinar los elementos representativos quetiene una representacion para comunicar deforma efectiva la informacion deseada.Plasmar la representacion de la realidadtridimensional sobre una superficie plana (elmapa o carta): mediante proyecciones. 25 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyecciones. Mapas y Cartas
Mapas/Cartas: representaciones en un plano y a tamanoreducido de la superficie de la Tierra o una parte de ella.Un mapa siempre introduce distorsiones (es decir, no escompletamente fiel a la realidad) debido a que la superficieque se pretende representar tiene curvatura.Esto fue demostrado matematicamente por Euler.
Para crear un mapa se emplea una proyeccion.Concretamente, se proyecta el plano terraqueo sobre unacierta superficie:
Un plano (proyeccion tipo azimutal).Un cilindro (proyeccion cilındrica).Un cono.
26 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyecciones.Otras formas de clasificar una proyeccion podrıan ser:
Por la orientacion de la superficie respecto al Ecuador:normales, trasversales u oblicuas.Por la posicion del globo terraqueo respecto a la superficie:tangente (podrıa tener una lınea sin deformacion) o secante(podrıa tener dos lıneas sin deformacion).
Mas importante es el tipo de proyeccion; p.ej. para el casode un plano:
Gnomonica (la proyeccion pasa por el centro de laTierra).Estereografica (pasa por el punto antipodal).Ortografica (la proyeccion tiene una direccion fija).Escenografica (la proyeccion viene desde fuera delglobo terrestre).
27 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Propiedades de una proyeccion
Las propiedades mas importantes de una proyeccion son:Conformidad. Una proyeccion es conforme si preserva losangulos (y por tanto los rumbos); ademas preserva las formasa nivel local. Los meridianos y paralelos siguen siendoperpendiculares. Muy utiles en navegacion.Conservacion de areas. Una proyeccion es equiareal si mantienela proporcion entre areas. Utiles sobre todo en aplicacionesadministrativas/polıticas.Equidistancia: una proyeccion NO puede mantener laproporcion correcta entre TODAS las distancias. No obstantesı pueden existir algunas lıneas con esta propiedad: lıneasautomecoicas. Una carta que tenga “muchas” lıneasautomecoicas se denomina equidistante.
Un mapa no puede ser conforme y equiareal (Euler); si lofuera, serıa una representacion perfecta del globo terrestre.Siempre hay que renunciar al menos a una de las propiedades.
28 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyeccion de Mercator.
Muy utilizada en navegacion marıtima.Inventada en el siglo XVI.Cilındrica, trasversal y conforme.
Ecuaciones matematicas:x = "! "0,
y = ln(tan
("4 + !
2 !))
.
No acotada en y : se suele cortar aaltas latitudes.
Cuanto mas cerca de los polos, mas
se distorsiona el mapa (observar
como se amplıa la distancia en
proyeccion entre paralelos
equidistantes en la realidad). 29 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyeccion cilındrica equidistante.
Permite ver la Tierra completa.
Cilındrica, trasversal, tangente, ortografica.
Tıpicamente usada para representar trazas de satelites.
Ecuaciones matematicas:x = "! "0, y = !.
Acotada en y . Por tanto, noconforme.
Tampoco es equiareal.
Su sencillez la hace popular en
representaciones generadas por
ordenador.
30 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyeccion estereografica.
Util para estudiar las proximidades deun punto, p.ej. el Polo.Conforme.Plana, normal, tangente, estereografica.
Ecuaciones matematicas:x = cos ! sen(" ! "0),
y = cos !0 sen ! ! sen !0 cos ! cos(" ! "0).
No acotada: se suele cortar apuntos cercanos al antipodal delcentro de la proyeccion.
Util para estudiar las proximidades
de un punto.
31 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyeccion de Lambert.
Utilizada en navegacion aerea.
Conica, normal, secantey estereografica.
Las lineas rectas aproximan rutasortodromicas (ver mas adelante).
Ecuaciones matematicas:x = # sen(n(" ! "0)), y = #0 ! # cos(n(" ! "0)),
donde: n =ln(cos !1 sec !2)
ln(tan("/4!!2/2) cot("/4!!1/2)),
# = F cotn($/4 + !/2), #0 = F cotn($/4 + !0/2),
F = 1/n cos !1 tann($/4 + !1/2).
No acotada se suele reducir a unazona de interes.
2 paralelos automecoicos (!1, !2).
Suelen ser locales y no globales.
32 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Proyeccion azimutal equidistante.
En el emblema de la ONU.
Azimutal, escenografica,tangente, normal.
Ecuaciones matematicas:x = c
sen c cos ! sen(" ! "0),
y = csen c [cos !0 sen ! ! sen !0 cos ! cos(" ! "0)], donde
cos c = sen !0 sen ! ! cos !0 cos ! cos(" ! "0).
Acotada: convierte el punto antipodal enuna circunferencia limıtrofe.
Solo libre de distorsion en torno al puntocentral.
Todas las distancias medidas desde el
punto central son verdaderas (lıneas
automecoicas).33 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias mas usuales
Dado un mapa, un origen y un destino, se plantea el problemade encontrar el camino mas apropiado para ir de uno a otro.
En la realidad, esta eleccion del camino (que se plasma en elplan de vuelo) esta sujeta a numerosas restricciones. A dıa dehoy, se vuela entre “waypoints”.
Ademas habrıa que tener en cuenta los vientos.
No obstante, en esta leccion vamos a simplificar el problema yvamos a suponer que en principio cualquier camino es volable.Ademas supondremos que la Tierra es una esfera de radio Re .
Veremos dos posibilidades:El camino mas corto: trayectoria ortodromica.El camino mas simple de volar: trayectoria loxodromica.
34 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias ortodromicas. Cırculos maximos
Una trayectoria ortodromica entre dos puntos de la Tierra esel camino mas corto entre dichos puntos.Podemos traducir el problema a terminos matematicos,considerando un modelo de Tierra esferica.Dados dos puntos PA y PB en la esfera, dados como (!A,"A)y (!B ,"B), de todas las curva sobre la esfera que unen dichospuntos, ¿cual es la de mınima distancia?Si estuvieramos en el plano, la respuesta es una lınea recta.En una superficie con curvatura, dicha curva se denominageodesica y en general no es una recta.La geometrıa diferencial da unas ecuaciones para hallar lageodesica en funcion de la primera forma diferencial, lossımbolos de Christo!el, etc...Para el caso de la esfera, la solucion es simple y solo requiereel uso de geometrıa elemental.
35 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Cırculos maximos
!
En una esfera, un “cırculo mayor” (grancırculo, cırculo maximo) viene dado por lainterseccion de un plano que pasa por elcentro de la esfera con la esfera.
Las “rectas esfericas” (geodesicas) sonlos cırculos mayores. Observese quecualesquiera dos rectas esfericas cortansiempre en dos puntos; por tanto, noexisten paralelas en geometrıa esferica.
El problema queda reducido a:Dados dos puntos, determinar el cırculo mayor que contiene aambos. ¿Es dicho cırculo unico?Medir la distancia sobre dicho cırculo: dara la distancia entrelos dos puntos.
36 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Cırculo maximo entre dos puntos
Dados dos puntos PA = (!A, "A), PB = (!B , "B), se dice quePA y PB son antipodales si !B = !!A y "B = 180o + "A.
Si PA y PB NO son antipodales, existe un unico cırculomaximo que contenga a ambos. La ortodromica sera el arcomas corto que los una.
Si PA y PB son antipodales, existen infinitos cırculos maximosque los unen; cualquier semicircunferencia de dichos cırculosmaximos es una ortodromica. ¿Por que? ¿Cual es por tanto ladistancia entre dos puntos antipodales (en millas nauticas)?
¿Son los meridianos ortodromicas?
¿Son los paralelos ortodromicas?
37 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo de la trayectoria ortodromica. Rumbo
Recordemos que en una esfera,r = Re [cos ! cos " cos ! sen " sen !].Recordemos ademas los vectores que definen la base local encoordenadas curvilıneas:
er =
cos ! cos "cos ! sen "
sen !
, eφ =
! sen ! cos "! sen ! sen "
cos !
, eλ =
! sen "cos "
0
.
Fısicamente er apunta hacia el cenit, eφ hacia el Norte y eλ
hacia el Este.Dada una curva cualquiera en la esfera, se define el rumbo(tambien llamado azimut) en un punto de la curva como elangulo que forma el vector eφ con el vector tangente de dichacurva et , medido en el sentido de las agujas del reloj.¿Que significado fısico tienen los rumbos 0o, 90o, 180o y 270o?En general el rumbo cambiara segun el punto de la curva y elsentido en que se recorra. 38 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo de la trayectoria ortodromica
Escribamos los vectores de los puntos:
rA = Re
cos !A cos "A
cos !A sen "A
sen !A
, rB = Re
cos !B cos "B
cos !B sen "B
sen !B
.
Geometricamente, se puede ver que el arco que abarca laortodromica es el angulo ' formado por los vectores.
Por tanto:rA · rB = 'rA''rB' cos ',
y se llega a:
cos ' = sen !A sen !B + cos !A cos !B cos("B ! "A)
¿Cual serıa la ecuacion implıcita que verificarıan todos lospuntos de la ortodromica?
Una vez se tiene ', dA,B = 'Re .39 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo del rumbo en la ortodromica I
¿Como calcular el rumbo del que habrıa que partir desde Apara recorrer la ortodromica? Recordemos que el rumbo serıael angulo entre el vector eφ en A y la tangente et en A.En primer lugar, se tiene que el vector normal al plano quedefine la ortodromica sera:
n = rA % rB
Por otro lado, et sera perpendicular tanto a n como a er enA. Por tanto:
et(A) = n % er (A) = (rA % rB)% er (A)
Usando la identidad: a% (b % c) = (a · c)b ! (a · b)c , se llegaa:
et(A) = !er (A)% (rA % rB) = (er (A) · rA)rB ! (er (A) · rB)rA
= Re (rB ! cos 'rA)40 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo del rumbo en la ortodromica II
El modulo de dicho vector et es:
'et(A)' = 'Re (rB ! cos 'rA) '= Re
√(rB ! cos 'rA) · (rB ! cos 'rA)
= Re
√R2
e + cos2 'R2e ! 2R2
e cos2 ' = R2e sen '
Por tanto el vector et normalizado es:
e∗t (A) =er (B)! cos 'er (A)
sen '
El rumbo ((A) se encontrara de
cos ((A) = eφ(A)·e∗t (A) =eφ(A) · er (B)! cos 'eφ(A) · er (A)
sen '
41 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo del rumbo en la ortodromica III
Luego finalmente:
cos ((A) =eφ(A) · er (B)
sen '
Sustituyendo el valor de los vectores, se llega a:
cos ((A) =cos !A sen !B ! cos !B sen !A cos("B ! "A)
sen '
¿Es el rumbo constante en todos los puntos de laortodromica?
¿Como se resolverıa el problema inverso? (Dado un puntoinicial, un rumbo inicial y una distancia a volar, determinar elpunto al que se llega siguiendo una ortodromica).
¿Cual es el rumbo en el caso antipodal?
42 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias loxodromicas
En la practica, un piloto no puede volar una ruta ortodromicaporque el rumbo de la trayectoria se modifica continuamente.
La trayectoria mas facil de volar es una que mantenga elrumbo constante.
Una trayectoria loxodromica entre dos puntos de la Tierra esel camino mas corto entre dichos puntos tal que el rumbo dedicho camino es constante.
Por tanto, son faciles de volar para un piloto humano.
Una trayectoria ortodromica sera mas corta, pero no volable;por tanto se puede aproximar por varios segmentosloxodromicos.
¿Son los meridianos loxodromicas?
¿Son los paralelos loxodromicas?
¿Son las loxodromicas curvas cerradas?43 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo de la loxodromica I
En primer lugar resolvamos el problema inverso: dado unrumbo ( y un punto inicial, ¿que curva se obtiene si se vuelacon dicho rumbo constante?Supongamos que describimos la curva sobre la esfera con unaecuacion del tipo ! = !(").Ejercicio: probar que se llega a una ecuacion diferencial
φ"
cos φ = 1tan χ .
Integrando llegamos a la siguiente ecuacion:
ln
(tan ()/4! !A/2)
tan ()/4! !/2)
)=
"! "A
tan(
¿Cual serıa la distancia entre dos puntos de una loxodromica?Recordar:
d =
∫ λ
λA
'et'd"
Se llega a: d = Re
√1 + tan2 ((!! !A). 44 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Calculo de la loxodromica II
Ya podemos resolver el problema directo: dados dos puntos Ay B, hallar la loxodromica que los une y la distancialoxodromica que los separa.
En primer lugar hallar el rumbo de la ecuacion:
ln
(tan ()/4! !A/2)
tan ()/4! !B/2)
)=
"B ! "A
tan(
En segundo lugar calcular la distancia de:d = Re
√1 + tan2 ((!B ! !A).
Tener cuidado con los casos especiales!!
En una proyeccion de Mercator las loxodromicas son rectas.
45 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias ejemplo
Estudiemos las trayectorias entre Sevilla (" = 5o59′W,! = 37o24′N) y las ciudades:
Madrid (" = 4o1"W, ! = 40o46"N).Nueva York (" = 73o58"W, ! = 40o47"N).Melbourne (" = 144o58"E, ! = 37o49"S).
Los resultados obtenidos fueron los siguientes:
Ciudad Distancia (ort., km) Rumbo inicial (grados, ort) Distancia (lox., km) Rumbo (lox., grados)Madrid 410.0943 23.78 410.1023 24.38
NY 5716.03 296.26 5864.08 273.67Melbourne 17427.04 100 17601.17 118.3
Si numericamente se calculan los mismos casos sobre elelipsoide WGS84, se obtienen los siguientes resultados:
Ciudad Distancia (ort., km) Rumbo inicial (grados, ort) Distancia (lox., km) Rumbo (lox., grados)Madrid 410.64 23.86 410.65 24.47
NY 5742.7 296.26 5891.5 273.65Melbourne 17469 99.86 17644 118.16
46 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias ejemplo: Sevilla-Madrid
! "! #!! #"! $!! $"! %!! %"! &!! &"!!'
!"("
!"
!&("
!&
)*+,-./*-0123(4
56.7*,8)0179-)(4
0
0
:9,6)963*/-
;6<6)963*/-
! "! #!! #"! $!! $"! %!! %"! &!! &"!%=
%>
%?
&!
&#
)*+,-./*-0123(4
5-,*,8)0179-)(4
0
0
:9,6)963*/-
;6<6)963*/-
! "! #!! #"! $!! $"! %!! %"! &!! &"!$%("
$&
$&("
$"
$"("
)*+,-./*-0123(4
@83A60179-)(4
0
0
:9,6)963*/-
;6<6)963*/-
47 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias ejemplo: Sevilla-Nueva York
! "!!! #!!! $!!! %!!! &!!! '!!!!(!
!'!
!%!
!#!
!
)*+,-./*-012345
67.8*,9)018:-)45
0
0
;7<7):73*/-
=:,7):73*/-
! "!!! #!!! $!!! %!!! &!!! '!!!$&
%!
%&
)*+,-./*-012345
6-,*,9)018:-)45
0
0
;7<7):73*/-
=:,7):73*/-
! "!!! #!!! $!!! %!!! &!!! '!!!#%!
#'!
#(!
$!!
)*+,-./*-012345
>93?7018:-)45
0
0
;7<7):73*/-
=:,7):73*/-
48 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Trayectorias ejemplo: Sevilla-Melbourne
! "!!! #!!! $!!! %!!! &!!!! &"!!! &#!!! &$!!! &%!!!!'!
!
'!
&!!
&'!
()*+,-.),/01234
56-7)+8(/079,(34
/
/
:6;6(962).,
<9+6(962).,
! "!!! #!!! $!!! %!!! &!!!! &"!!! &#!!! &$!!! &%!!!!#!
!"!
!
"!
#!
()*+,-.),/01234
5,+)+8(/079,(34
/
/
:6;6(962).,
<9+6(962).,
! "!!! #!!! $!!! %!!! &!!!! &"!!! &#!!! &$!!! &%!!!=!
&!!
&&!
&"!
&>!
()*+,-.),/01234
?82@6/079,(34
/
/
:6;6(962).,
<9+6(962).,
49 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Proyecciones. Mapas y CartasTrayectorias ortodromicas y loxodromicas
Aproximacion de ortodromicas por loxodromicas
En el ejemplo (Sevilla-NY) se crean dos waypoints extra deforma que la ortodromica se aproxima por tres loxodromicas.
La proyeccion de la figura es tipo Mercator.
50 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistemas de referencia usuales en Navegacion Aerea
Veremos los siguientes sistemas de referencia:Sistema inercial geocentrico (ECI: Earth Centered Inertial).Sistema de Ejes Tierra (ECEF: Earth Centered, Earth Fixed)Sistema de referencia topocentrico.Sistema de ejes horizonte local (LLS: Local Level System,NED: North East Down).Sistema de referencia de azimut de deriva (Wander azimuthframe).Sistema de ejes cuerpo (BFS: Body Fixed System).
Ademas estudiaremos las relaciones entre los diferentessistemas de referencia y como pasar de uno a otro.
En este proceso se definiran cantidades utiles, como lavelocidad respecto a Tierra y los angulos de Euler que definenla actitud de una aeronave.
51 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema Inercial Geocentrico (ECI)
Util para el estudio del movimiento decuerpos orbitando la Tierra, porejemplo los satelites GPS, y comosistema de referencia inercial absoluto.
El eje Oz coincide con el eje derotacion de la Tierra.
El plano Oxy contiene al Ecuador yOx apunta a !, el primer punto deAries (una direccion fija en lasestrellas).
No es realmente inercial (seesta despreciando el movimiento de laTierra en torno al Sol, y el movimientopropio del Sol respecto a las estrellas).
52 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema de Ejes Tierra (ECEF)
Ligado ıntimamente a la Tierra, rota con ella.Util para referenciar posiciones terrestres.El plano Oxy contiene al Ecuador y el plano Oxz al Meridianode Greenwich.La forma de la Tierra se asimila a un elipsoide de revolucion(Elipsoide Internacional WGS84) alrededor del eje Oz (derotacion de la Tierra).
53 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema Topocentrico
Ligado ıntimamente a la Tierra,con origen en el donde seencuentre el observador (E ).
Se usa para tomar medidasdesde Tierra.
El plano Exy es tangente al Elipsoide Internacional WGS84 enla superficie, la direccion Ex apunta al Este, la direccion Ey alNorte, y la Ez sigue la vertical local “hacia arriba” (cenit). Ladireccion local “hacia abajo” se denomina nadir.
Las observaciones se componen de tres medidas: r o *(distancia al objeto); A, azimut; y h, la altura o elevacionsobre el plano horizontal.
54 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema de ejes horizonte local (LLS,NED)42 APPLIED MATHEMATICS IN INTEGRATED NAVIGATION SYSTEMS
Fig. 3.1 ECEF coordinate frame with z axis along Earth's rotation axis.
Earth-Centered, Earth-Fixed Frame The Earth-centered, Earth-fixed (ECEF) frame is fixed within the Earth and its
rotation, and it is centered at the Earth's center. Axis definitions in current use vary. Shown in Figs. 3.1, 3.2, and 3.3 are illustrations of three possible ECEF frames. In the first frame, shown in Fig. 3.1, the z axis is parallel to and aligned with the direction of the Earth's rotation. In the equatorial plane, the x axis locates the Greenwich meridian and the y axis completes the right-hand system. In Fig. 3.2, the y axis is parallel to the direction of the Earth's rotation. In the equatorial plane, the z axis locates the Greenwich meridian and the x axis completes the right- hand system. In the third frame, Fig. 3.3, the x axis is parallel to the direction of the Earth's rotation. The z axis locates the Greenwich meridian and the y axis completes the right-hand system.
Earth-Centered Inertial Frame In each of these figures, the corresponding Earth-centered inertial (ECI) frame is
established by the direction of the Earth's rotation. This inertial frame is fixed to an inertial reference. The further specification of the inertial reference is not necessary for the following developments; however, if, for example, navigation aids are based on stellar updates, then the inertial reference would have to be specified.
Local Geodetic Frame Also shown in Figs. 3.1,3.2, and 3.3 are local geodetic (geographic) frames that
are usually associated with the ECEF frame indicated.
Llamada en ingles LLS=Local LevelSystem o NED=North East Down.Tambien “ejes geodeticos ogeodesicos locales”.
Es un sistema local centrado en unpunto que puede o no estar en lasuperficie de la Tierra.
Por tanto cambia al moverse elpunto.
Esta definida respecto al elipsoide: la direccion Norte es eφ, ladireccion Este es eλ y la direccion abajo es !eh.
Es el sistema de referencia fundamental usado en navegacion,aunque a veces es sustituido por el de azimut errante (versiguiente transparencia).
55 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema de referencia de azimut de deriva
Llamada en ingles “Wanderazimuth frame”.
Se usa frecuentemente ennavegacion en vez del sistemade referencia horizonte localdebido a que, en lasproximidades de los polos, dichosistema esta mal definido yocasiona problemas numericos.
Se rota un angulo ' respecto a la direccion N/E. Dichoangulo y su variacion se puede definir por el disenador delsistema de navegacion.
Con ' = ' = 0 recuperamos el sistema de ejes horizonte local.
Tıpicamente se define ' = " sin !.56 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema de referencia ejes cuerpo (BFS)
Llamada en ingles BFS=Body Fixed System.Se utiliza para definir la actitud (orientacion) de la aeronave,respecto el sistema de ejes de navegacion (NED o wanderazimuth). 57 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Sistema de referencia ejes cuerpo (BFS)
Los ejes estan definidos como en lafigura.
El centro del sistema de referencia,en el centro de masas del avion.
El eje xb contenido en el plano desimetrıa del avion, hacia el morro.El angulo rotado en torno a xb es +(alabeo o roll).
El eje zb contenido en el plano de simetrıa del avion, haciaabajo. El angulo rotado en torno a zb es , (guinada o yaw).
El eje yb completa el triedro (direccion aproximada del aladerecha). El angulo rotado en torno a yb es - (cabeceo opitch).
58 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Relacion entre sistemas de referencia
Dado un sistema de referencia A y un sistema de referencia B,para pasar de uno a otro habra que tener en cuenta doshechos:
Cuando no coinciden los orıgenes de A y B, habra que realizaruna translacion: rA = rB + rBA.Cuando A y B estan rotados entre sı, habra que realizar unarotacion: rA = CA
B rB , donde CAB sera la matriz del cambio de
base entre A y B (ortogonal).
Ademas, a la hora de estudiar derivadas, hay que tener encuenta que la derivada tomada en dos sistema de referenciadistintos cambia si dichos sistemas rotan uno en relacion alotro con velocidad angular $B/A. Lo estudiaremos masadelante.
59 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Algunas definiciones de interes
Velocidad inercial: es la derivada de la posicion, tomada en elsistema de referencia inercial, es decir, v i = r i .
Velocidad respecto a Tierra: es la derivada de la posicion,tomada en el sistema de referencia ejes Tierra, es decir,v e = r e .
Observese que ambas definiciones no coinciden puesto que laTierra rota; ademas v e "= C e
i v i porque las derivadas no estantomadas en el mismo sistema de referencia. Mas adelanteveremos como estan relacionadas ambas cantidades.
Velocidad en los ejes de navegacion: es la velocidad respecto aTierra v e tomada en el sistema de referencia de navegacion,es decir, vn = Cn
e v e . Observese que vn "= rn = 0!
60 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Algunas definiciones de interes
Esta velocidad vn es la velocidad “percibida” en el avion.Cuando n es el sistema de referencia horizonte local, estavelocidad se suele descomponer en:
Modulo: velocidad respecto a Tierra, a veces llamada Vg . Serıala velocidad real del avion respecto al suelo.Angulo formado entre vn y el plano horizonte local: angulo detrayectoria . (flight path angle).Angulo formado entre la proyeccion de vn en el plano horizontelocal y la direccion Norte: angulo de rumbo ( (heading angle).
Hay que tener en cuenta que el angulo de rumbo ( y el deguinada , pueden no coincidir, especialmente en presencia deviento.
61 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Relacion entre ECEF y ECI.
Para encontrar C ei , hay que tener en cuenta que la Tierra gira
con velocidad angular $i/e = [0 0 $E ]T , es decir, ambossistemas de referencia estaran rotados una cantidad-E = -E0 + $E t. Luego:
ECIθE!(zi
ECEF
Por tanto:
C ei =
c-E s-E 0!s-E c-E 0
0 0 1
Donde c = cos y s = sen.
62 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Relacion entre ECI y LLS.
Para encontrar C ge (donde g hace referencia al caracter
geodesico de LLS), hay que tener en cuenta la posicion (", !)y realizar las siguientes operaciones:
Rotar " grados en torno a ze .Rotar !! grados en torno al nuevo eje y .El sistema resultante tiene x en la direccion !z y z en ladireccion x . Por tanto girar -90 grados adicionales.
ECEFλ!(ze
S−φ!(yS
S ′ −90!(yS"
LLS
Por tanto:
CSe =
2
4c" s" 0!s" c" 0
0 0 1
3
5 CS"S =
2
4c! 0 s!0 1 0
!s! 0 c!
3
5 CgS" =
2
40 0 10 1 0!1 0 0
3
5
Cge = Cg
S"CS"S CS
e =
2
4!s!c" !s!s" c!!s" c" 0
!c!c" !c!s" !s!
3
5
63 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Relacion entre LLS y azimut errante (n).
Para encontrar Cng , hay que tener en cuenta que la rotacion de
angulo ' en torno al eje z . Por tanto:
LLSα!(z
WA
Por tanto:
Cng =
c' s' 0!s' c' 00 0 1
64 / 67

GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Relacion entre n y BFS
Para encontrar Cbn hay que tener en cuenta los angulos de
Euler (,, -, +).
MATHEMATICAL PRELIMINARIES
Fig. 2.3 Single rotation in three-axis coordinate frame.
A vector's components described in one frame can be described in another frame of arbitrary orientation with respect to the original frame by a transformation ma- trix composed of three sequential rotations (Euler angles) starting from the original frame's axes. These rotations are illustrated in Fig. 2.4. In this figure, the primes are used to represent the corresponding transformed axis. The final y frame cor- responds to the triple primed x axes. Written in vector form, the transformation is
where the transformation DCM, c:, transforms the components of the r vector from the x frame to the y frame.
Fig. 2.4 Three rotations in three-axis coordinate frame.
Las operaciones son:Rotar , grados en torno a zn.Rotar - grados en torno al nuevo eje y .Rotar + grados en torno al nuevo eje x .
nψ!(zn
Sθ!(yS
S ′ ϕ!(xS"
BFS
Se llega a:
Cbn = Cb
S"CS"S CS
n =
2
4c%c& !c's& + s's%c& s's& + c's%c&c%s& c'c& + s's%s& !s'c& + c's%s&!s% s'c% c'c%
3
5
65 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Tiempos de interes en Navegacion Aerea
Tiempo Universal Coordinado (UTC):Medido por relojes atomicos a lo largo del mundo.Cada cierto tiempo (a lo largo de anos) se anaden o restansegundos para compensar la pequena irregularidad de larotacion de la Tierra.El huso horario se define como UTC±n. Ademas hay que teneren cuenta el cambio de horario de verano. Por ejemplo, Sevillaes UTC+1, y en verano UTC+2.A efectos practicos UTC coincide con el viejo GMT.
Tiempo GPS (GPST):Sirve de referencia para las aplicaciones relacionadas con GPS.Medido en los relojes atomicos a bordo de los Navstar.No se anaden ni restan segundos: no coincide con UTC (difiereen segundos).
66 / 67
GeodesiaCartografıa
Sistemas de referencia. Tiempos
Sistemas de referenciaTiempos
Husos horarios
67 / 67

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Navegacion AereaTema 2: Conceptos Basicos de Navegacion Aerea.
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: La estrella PolarEn tiempos antiguos, la navegacion (fundamentalmentemarıtima) se realizaba fundamentalmente de dos formas:
navegacion visual: basada en puntos de referencia conocidos.navegacion astronomica: basada en la observacion defenomenos celestes.
La estrella polar (Polaris) es un punto de referenciafijo en el cielo del Hemisferio Norte; esta casialineada con el eje de rotacion de la Tierra. Selocaliza encontrando primero la constelacion de laOsa Mayor.Por tanto, su elevacion en el cielo sobre el horizonte(hPOLARIS) es exactamente igual a la latitud (φ) delobservador: φ = hPOLARIS.
2 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: El SolDe dıa o con el cielo nublado, no es posible determinarhPOLARIS. Si es posible ver el Sol, entonces se puede usar laelevacion en el cielo del Sol, al mediodıa: hSUN.
El mediodıa local esta determinado cuando el Sol alcanza sumaxima elevacion en el cielo. En ese instante pasa por elmeridiano del observador.
Se debe conocer un dato llamado la declinacion delSol, δSUN (es la “latitud geocentrica del Sol”) . Estadeclinacion depende del dıa del ano y se puedeencontrar en tablas o calcularse.
Entonces: φ = 90o ! hSUN + δSUN.
3 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: El hemisferio Sur
En el hemisferio Sur, de noche, no se puede ver la estrellaPolaris, ni existe ninguna estrella alineada con el eje derotacion de la Tierra hacia el Sur.
Se emplea una constelacion (“la cruz”) cuyo “brazomayor” apunta en direccion al Polo Sur celeste.
A una distancia de 4.5 veces dicho brazo seencuentra el Polo Sur celeste. Su elevacion es !φ.
Otra alternativa es usar el “Puntero de la cruz”, dosestrellas cercanas a la Cruz, como se muestra en lafigura.
4 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: Instrumentos
En todas las situaciones anteriores, es necesario medir laelevacion de un objeto celeste en el cielo.
Para ello se usaban diversos instrumentos astronomicos.Astrolabio: media circunferencia (ant. siglo X).
Cuadrante: un cuarto de circunferencia (siglo XII).
Sextante: un sexto de circunferencia, con mecanismomas sofisticado (de forma que no sea necesario,p.ej., mirar directamente al Sol) y mayor precision(siglo XVIII).
5 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: Navegacion a estima
Hallar la latitud mediante los metodos anteriormente descritosno es suficiente para encontrar la posicion sobre la Tierra.No obstante, conocida una estimacion de la posicion inicial(fix), del rumbo, y de la velocidad, y midiendo el tiempo, esposible predecir la trayectoria.
En los barcos, para predecir la velocidad, se utilizabala llamada “corredera”: formada por un lastre(barquilla), una carrete y un cordon marcado connudos, separados 15.43 metros (1 mn/120).
Lanzando la barquilla al agua y contando el numerode nudos en 30 segundos, se estima la velocidad.
Conocida la velocidad y el rumbo, se puede estimar(por ejemplo en una carta tipo Mercator) latrayectoria recorrida por el barco, durante un tiempodado (medido por ejemplo con un reloj de arena),siguiendo la ruta loxodromica.
Problema: los errores (deriva) crecen con t. 6 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: El problema de la longitud I
Con los metodos anteriormente descritos se puede conseguiruna navegacion “cruda” (de hecho se llego a America), perono es posible localizar con precision la situacion de un barcoen medio de los oceanos.Para hacerlo es necesario hallar la longitud. La solucionteorica de este problema era ya conocida en el siglo XVI.
1 Observar una estrella de movimiento conocido o elSol al mediodıa (mediante p.ej. un sextante).
2 Medir el tiempo de observacion (mediante uncronometro).
3 Comparar con la posicion de dicho cuerpo estelar enun lugar conocido (obtenida de tablas deefemerides).
4 Resolver el triangulo astronomico (usandotrigonometrıa elemental).
7 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: El problema de la longitud II
Por ejemplo, si para un dıa dado se determina la hora t a laque es el mediodıa local, y se conoce la hora t0 en la que esmediodıa local, dicho dıa, en Greenwich: λ " (t0 ! t)15o,donde los tiempos estan medidos en horas y con el mismoreloj.El problema es tecnologico: ¿como medir el tiempo conprecision a bordo de un barco que navega durante meses?
Los mejores cronometros del siglo XVI tenıan almenos 10 minutos de error al dıa.
El problema fue tan importante que varios paıses(Espana en 1598, Gran Bretana en 1714)convocaron concursos internacionales.
Finalmente John Harrison (1730) resolvio elproblema para Inglaterra inventando un reloj quecometıa un error de segundos al dıa.
Su mejor reloj viajo a Jamaica desde Inglaterracometiendo solo 5 segundos de error en 1764. 8 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Historia de la navegacion: La era moderna
El nacimiento de la aeronautica ha demandado una granmejora de los metodos de navegacion, que ha de tener encuenta las 3 dimensiones.En la primera mita del siglo XX nacen las radioayudas: ADF,VOR, ILS...En la segunda mitad del siglo XX:
Los avances en computacion hacen posible la navegacioninercial.La conquista del espacio hace posible la navegacion porsatelite: Transit, GPS...
Ultimos avances: sensores inerciales de bajo coste, GPSdiferencial, futuro sistema GALILEO...
9 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacionTipos de navegacion
Navegacion. Sistemas de navegacion.
Navegacion: Conjunto de tecnicas para desplazarse entre dospuntos conocidos, origen y destino, siguiendo una ciertatrayectoria.
Sistemas de navegacion: permiten obtener la posicion,velocidad, actitud y tiempo en cualquier instante. PVAT:
P: posicion, dada como xe = [xe y e ze ]T , (λ, φ, h)...
V: velocidad, dada como V ng o (Vg , γ, χ)...
A: actitud, dada por los angulos de Euler (ψ, θ, ϕ) uotras representaciones.
T: tiempo (UTC).
10 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacionTipos de navegacion
Errores de navegacion.
Un sistema de navegacion no solo tiene que proporcionarcomo salida el dato actual de PVAT. Puesto que la estimaciondel PVAT nunca es perfecta, tambien es necesario conoceruna estimacion del error cometido.Tıpicamente se visualiza para cada instante el error como unaregion de incertidumbre (tıpicamente un elipsoide) en cuyocentro se encuentra la estimacion actual de la posicion delavion.
El error cometido en la direccion del movimiento se llama ATE(along-track error).El error cometido en la direccion perpendicular al movimientose llama CTE/XTE (cross-track error).El error cometido en la direccion vertical se llama VE (verticalerror).
Uno de los objetivos de la navegacion es minimizar laincertidumbre en posicion, es decir, minimizar el tamano delelipsoide de incertidumbre.
11 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacionTipos de navegacion
Tipos de NavegacionLos sistemas de navegacion se pueden dividir en dos grandesfamilias:
Navegacion autonoma: Aquella que emplea dispositivosinternos de la aeronave sin necesidad de emplear sistemasexternos. Por tanto no son vulnerables a fallos encomunicaciones, ni dependen de la disponibilidad de otrossistemas ajenos. Ello los hace muy deseables, especialmente enaeronaves militares. Dos ejemplos son la antigua navegacion aestima y la navegacion inercial (que no es sino un tiposofisticado de navegacion a estima).Navegacion por posicionamiento: Emplea medidas externascomo referencia para localizar la posicion. Por ejemplo,navegacion visual (basada en puntos de referencia visuales),navegacion astronomica (basada en la observacion de cuerposcelestes), navegacion basada en radioayudas (basada ensenales de radio recibidas), navegacion por satelite...
En realidad, ambos tipos de navegacion son complementariosy la tendencia moderna es a integrarlos.
12 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacionTipos de navegacion
Navegacion integrada
La navegacion integrada es aquella que emplea la informacionproporcionada por todos los diferentes sensores y sistemas denavegacion para obtener la mejor estimacion PVAT posible.
La navegacion autonoma (p.ej. inercial) proporciona unaestimacion continua (alto ancho de banda), integrando lasecuaciones del movimiento. Pero se degrada con el tiempo(errores no acotados).La navegacion por posicionamiento proporciona unaestimacion cada cierto tiempo (bajo ancho de banda), perocon error acotado. 13 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
La actitud de la aeronave
La actitud de la aeronave es su orientacion respecto al sistemade referencia de navegacion (tıpicamente el sdr horizonte localo el de azimut errante).En realidad, es suficiente conocer la orientacion de un sistemade referencia solidario a la aeronave (los ejes cuerpo).Los angulos de Euler cabeceo, guinada y alabeo son larepresentacion clasica, pero no la unica; existen otrasrepresentaciones con diferentes ventajas e inconvenientes.Estudiaremos cuatro representaciones diferentes:
Matriz de cosenos directores.Angulos de Euler.Angulo y eje de Euler.Cuaterniones.
Nota: La posicion (φ, λ) o (φ, λ,α) tambien se puedeconsiderar una “orientacion” del sistema de referencia denavegacion respecto al ECEF.
14 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Matriz de cosenos directores (DCM) I
Dado un sistema de referencia S (determinado por una basede vectores unitarios (ex , ey , ez) y otro S’ (determinado poruna base de vectores unitarios (ex ! , ey ! , ez !), la orientacion deS respecto a S’ esta totalmente determinada por la matriz decambio de base CS !
S , que para un vector generico v permitecambiar de base: vS ! = CS !
S vS . Denotemos:
CS′S =
2
4c11 c12 c13c21 c22 c23c31 c32 c33
3
5
Observese: eS !x = C S !
S eSx = C S !
S [1 0 0]T = [c11 c21 c31]T .
Luego: ex ! · ex = (eS !x ! )
TeS !x = [1 0 0][c11 c21 c31]T = c11.
Igualmente:
c21 = ey′ · ex , c31 = ez′ · ex
c12 = ex′ · ey , c22 = ey′ · ey , c32 = ez′ · ey
c13 = ex′ · ez , c23 = ey′ · ez , c32 = ez′ · ez
15 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Matriz de cosenos directores (DCM) IIPor tanto:
CS′S =
2
4ex′ · ex ex′ · ey ex′ · ezey′ · ex ey′ · ey ey′ · ezez′ · ex ez′ · ey ez′ · ez
3
5
Observese que razonando igualmente:
CSS′ =
2
64ex′ · ex ey′ · ex ez′ · exex′ · ey ey′ · ey ez′ · eyex′ · ez ey′ · ez ez′ · ez
3
75 = (CS′S )T
Y por tanto, puesto que C SS ! = (C S !
S )!1, obtenemos queC S
S ! es ortogonal, es decir: (C S !S )!1 = (C S !
S )T . Tambien sejustifica el nombre “matriz de cosenos directores”.Otra propiedad es det(C S
S !) = 1. Esto se debe a que1 = det(Id) = det((C S
S !)(CSS !)
!1) = det((C SS !)(C
SS !)
T ) =!det(C S
S !)"2
. Por tanto det(C SS !) = ±1. El signo +
corresponde a los sistemas de referencia que son triedros“a derechas”.
16 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Matriz de cosenos directores (DCM) III
Es una representacion de la actitud con 9 parametros. Estosparametros son dependientes entre sı, es decir, las entradas dela matriz C no pueden ser cualesquiera (la matriz ha de serortogonal y con determinante +1).
Supongamos que la actitud de S2 respecto a S1 viene dadapor CS2
S1y que la actitud de S3 respecto a S2 viene dada por
CS3S2
. La actitud de S3 respecto a S1 viene dada por
CS3S1
= CS3S2
CS2S1
. Por tanto la “composicion” de actitudes vienedada por un simple producto matricial.
17 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulos de Euler I
En general una actitud se puede describir mediante tresrotaciones, en ejes no consecutivos.Por ejemplo, la rotacion clasica:
n!!$zn
S"!$yS
S " #!$xS!
BFS
Existen otras posibilidades:
n"1!$xn
S"2!$yS
S " "2!$zS!
BFS n!!$zn
Si!$
xSS " $!$
zS!BFS
Existen hasta 12 posibles secuencias de angulos de Euler pararepresentar la actitud.El numero de parametros de cada secuencia es siempre 3.Se puede obtener la DCM a partir de los angulos de Eulermediante multiplicacion de matricies de rotacion elementales.Por ejemplo: Cb
n (ψ, θ, ϕ) = CbS !(ϕ)CS !
S (θ)CSn (ψ).
18 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulos de Euler II
Como ya vimos, para el caso (ψ, θ, ϕ):
Cbn =
2
4cθcψ cθsψ "sθ
"cϕsψ + sϕsθcψ cϕcψ + sϕsθsψ sϕcθsϕsψ + cϕsθcψ "sϕcψ + cϕsθsψ cϕcθ
3
5
Observese que (180o + !, 180o ! ", 180o + #) es la mismaactitud que (!, ",#). Por ello se suelen limitar losangulos, tıpicamente " # [!90o, 90o].
n!!$zn
S"!$yS
S " #!$xS!
BFS
Para obtener los angulos de la DCM:1 θ = ! arc sen c13.2 Con cos ψ = c11/ cos θ, sen ψ = c12/ cos θ, obtener ψ.3 Con sen ϕ = c23/ cos θ, cos ϕ = c33/ cos θ, obtener ϕ.
19 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulos de Euler III
Su mayor ventaja es su significado fısico.
No obstante, hay que tener cuidado a la hora de componerdos actitudes.
Supongamos que la actitud de S2 respecto a S1 viene dadapor (ψ1, θ1, ϕ1) y que la actitud de S3 respecto a S2 vienedada por (ψ2, θ2, ϕ2). Denotemos como (ψ3, θ3, ϕ3) la actitudde S3 respecto a S1. En general: ψ3 %= ψ1 + ψ2, θ3 %= θ1 + θ2,ϕ3 %= ϕ1 + ϕ2.
Para obtener (ψ3, θ3, ϕ3) hay que calcular los angulos de Eulera partir de CS3
S1= CS2
S1(ψ1, θ1, ϕ1)C
S3S2
(ψ2, θ2, ϕ2).
Por tanto es complicado operar con angulos de Euler.
20 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulo y eje de Euler I
Teorema de Euler: “el movimiento mas general posible de unsolido con un punto fijo es una rotacion alrededor de un unicoeje”.Nota: De momento consideramos la actitud en un instante detiempo concreto, es decir, no estudiamos cuando hay unarotacion que cambia con el tiempo.Denominemos a un vector unitario en la direccion de dicho eje(Eje de Euler) como eS/S ! y a la magnitud de la rotacion
(Angulo de Euler) como θ.Por tanto &eS/S !& = 1 y si escribimos eS !
S/S ! = [ex ey ez ]T , se
tiene que e2x + e2
y + e2z = 1.
Dado un vector v = [vx vy vz ]T definimos el operador v#como:
v× =
2
40 "vz vyvz 0 "vx"vy vx 0
3
5
21 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulo y eje de Euler II
El operador v# sirve para escribir facilmente el productoescalar v ' w , para cualquier vector w , en un sistema dereferencia dado S : (v ' w)S =
!vS
"#wS .
Por tanto la actitud con el angulo y eje de Euler quedarepresentada con los parametros (eS !
S/S ! , θ). ¿Como se puedepasar de estos parametros a la DCM y viceversa?
Se tiene que
CS !S = cos θId + (1! cos θ)eS !
S/S !(eS !S/S !)
T ! sen θ#eS !S/S !
$#.
Esta es la llamada formula de Euler-Rodrigues.
Por otro lado, dada CS !S , se tiene que:
cos θ =Tr(CS !
S )! 1
2#eS !S/S !
$#=
1
2 sen θ
#(CS !
S )T ! CS !S
$
22 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Angulo y eje de Euler III
Por tanto se representa la actitud con cuatro parametros: trescomponentes de un vector unitario y un angulo. Estosparametros tienen un claro significado fısico.Observese que la actitud dada por (eS !
S/S ! , θ) y por
(!eS !S/S ! ,!θ) es exactamente la misma. Para evitar esta
ambiguedad, se restringe θ al intervalo [0, 180o ].La actitud inversa (la de S respecto a S ") vendra dada por(eS
S !/S , θ"). Observese que eSS !/S = eS !
S/S ! y θ" = !θ.
Finalmente si la actitud de S2 respecto a S1 viene dada por(eS2
S1/S2, θ1) y que la actitud de S3 respecto a S2 viene dada
por (eS3S2/S3
, θ2), si denotamos como (eS3S1/S3
, θ3) la actitud deS3 respecto a S1, viene dada por:cos θ3 = " cos θ1 cos θ2 + sen θ1 sen θ2(eS1/S2
· eS2/S3)
eS3S1/S3
=1
sen θ3
“sen θ1 cos θ2eS1/S2
+ cos θ1 sen θ2eS2/S3+ sen θ1 sen θ2(eS1/S2
# eS2/S3)”
23 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Cuaterniones
Los cuaterniones son una creacion de Hamilton (siglo XIX),que los consideraba su mayor invento; penso serıan como el“lenguaje universal” de la fısica. Pero fueron sustituidospronto por los vectores (Gibbs) y las matrices (Cayley).Recordemos que un numero complejo z es como un “vector2-D”, que se puede escribir como z = x + iy . Los numeroscomplejos de modulo unidad se pueden usar para representaruna rotacion 2-D, ya que en el caso de que |z | = 1, se puedeescribir z = ei", y en tal caso representa una rotacion 2-D deangulo θ.Los cuaterniones son una extension de los numeros complejosa “4 dimensiones”. Escribimos un cuaternion q como:q = q0 + iq1 + jq2 + kq3.En ocasiones q0 se denomina la “parte escalar” de q y sedefine q = [q1 q2 q3]T como la “parte vectorial” de q.Algunos autores escriben q4 en vez de q0.
24 / 28

Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Algebra de cuaterniones I
Para poder entender los cuaterniones es importante conocersu algebra, es decir, como se opera con cuaterniones.
Suma: la suma es componente a componente, es decir, dadoq = q0 + iq1 + jq2 + kq3 y q" = q"0 + iq"1 + jq"2 + kq"3, se tieneque q"" = q + q" = q""0 + iq""1 + jq""2 + kq""3 viene dado por lasformulas:q""0 = q0 + q"0, q""1 = q1 + q"1, q""2 = q2 + q"2, q""3 = q3 + q"3.
Producto: el producto es componente a componente,conociendo las siguientes reglas de multiplicacion:i · i = !1, i · j = k, i · k = !j , j · i = !k, j · j = !1, j · k = i ,k · i = j , k · j = !i , k · k = !1.
Se tiene la formula de Hamilton: i · j · k = !1.
Observese que en general qq" %= q"q: La multiplicacion no esconmutativa!
25 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Algebra de cuaterniones II
Forma matricial del producto: Es posible escribir el productoq"" = q"q en forma matricial.
%
&&'
q""0q""1q""2q""3
(
))* =
%
&&'
q"0 !q"1 !q"2 !q"3q"1 q"0 !q"3 q"2q"2 q"3 q"0 !q"1q"3 !q"2 q"1 q"0
(
))*
%
&&'
q0
q1
q2
q3
(
))*
Forma “vectorial” del producto: q""0 = q"0q0 ! q"Tq,q"" = q0q" + q"0q + q" ' q.Conjugado: Como para los numeros complejos, dadoq = q0 + iq1 + jq2 + kq3 se define el conjugado de q comoq$ = q0 ! iq1 ! jq2 ! kq3.Modulo: Se define el modulo de q = q0 + iq1 + jq2 + kq3
como |q|2 = qq$ = q20 + q2
1 + q22 + q2
3Division: Se define la division usando el conjugado:q"/q = q"/q · q$/q$ = (q"q$)/|q|2.
26 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Representacion de la actitud mediante cuaterniones I
Dada la actitud representada mediante el eje y angulo deEuler, e y θ, se “codifica” dicha actitud en forma decuaterniones mediante:q0 = cos θ/2, q = sen θ/2e.
Observese que si un cuaternion q representa una actitud,entonces |q| = 1.Recordemos el operador q#:
q× =
2
40 "q3 q2q3 0 "q1"q2 q1 0
3
5
Para pasar de la DCM C a cuaterniones, se utilizan las
formulas: q0 =(
1+Tr(C)
2 y q# = 14q0
!CT ! C
".
Para pasar de cuaterniones a DCM se utiliza la formula deEuler-Rodrigues para cuaterniones:C =
!q2
0 ! qTq"Id + 2qqT ! 2q0q#.
27 / 28
Introduccion historicaNavegacion. Definicion y tipos de navegacion
La actitud de la aeronave. Formas de representacion
Matriz de cosenos directoresAngulos de EulerCuaterniones
Representacion de la actitud mediante cuaterniones II
Formula de Euler-Rodrigues en forma matricial:
C(q) =
2
4q20 + q2
1 " q22 " q2
3 2(q1q2 + q0q3) 2(q1q3 " q0q2)2(q1q2 " q0q3) q2
0 " q21 + q2
2 " q23 2(q2q3 + q0q1)
2(q1q3 + q0q2) 2(q2q3 " q0q1) q20 " q2
1 " q22 + q2
3
3
5
Los cuaterniones son una representacion de la actitud querequiere 4 parametros, con la relacion |q| = 1.
Tienen la desventaja de ser una representacionmatematica sin sentido fısico.
Para pasar de la DCM a cuaterniones y viceversa no esnecesario usar formulas trigonometricas.Si qS !S representa la actitud de S’ respecto a S y qS !!S !
representa la actitud de S” respecto a S’, entonces qS !!S ,la actitud de S” respecto a S, se calcula comoqS !!S = qS !S · qS !!S ! (al reves que la DCM).
28 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
Navegacion AereaTema 3: Ecuaciones de la navegacion.
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
Ecuaciones Diferenciales Cinematicas de la Actitud
Para el caso de la posicion, las ecuaciones cinematicasrelacionan el vector posicion con el vector velocidad, mientrasque las ecuaciones dinamicas relacionan el vector velocidadcon el vector fuerza.
Para el caso de la actitud, las ecuaciones diferencialescinematicas (EDC) relacionan la representacion de la actitud(DCM, angulos de Euler, cuaterniones) con la velocidadangular !. Tıpicamente estas ecuaciones son no-lineales.
En el sistema de navegacion inercial, los giroscopos nos daran!, y habra que utilizar las EDC, es decir, integrar lasecuaciones, para calcular la actitud.
Por tanto es importante conocer las diferentes EDC para lasdiferentes representaciones, para ver cual es la mas ventajosadesde un punto de vista computacional.
2 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
DCM para angulos pequenos I
Supongamos que tenemos dos sistemas de referencia A y B,relacionados de la siguiente forma:
Ad!1!"xA
S1d!2!"yS1
S2d!3!"zS2
B
donde suponemos que d"i son angulos pequenos, de formaque podemos aproximar cos d"i # 1 y sen d"i # d"i .Si escribimos las matrices de rotacion teniendo en cuenta laaproximacion anterior, obtenemos:
CS1A =
2
41 0 00 1 dθ10 !dθ1 1
3
5 , CS2S1
=
2
41 0 !dθ20 1 0
dθ2 0 1
3
5 , CBS2
=
2
41 dθ3 0
!dθ3 1 00 0 1
3
5 .
Si escribimos CBA = CB
S2C S2
S1C S1
A y despreciamos todos losproductos dobles de angulos, es decir, d!id!j # 0,obtenemos:
CBA =
2
41 dθ3 !dθ2
!dθ3 1 dθ1dθ2 !dθ1 1
3
5 = Id!
2
40 !dθ3 dθ2
dθ3 0 !dθ1!dθ2 dθ1 0
3
5 = Id! dθ!,
3 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
DCM para angulos pequenos II
En la anterior transparencia, se ha definidod" = [d"1 d"2 d"3]T y la matriz
d"! =
!
"0 !d"3 d"2
d"3 0 !d"1
!d"2 d"1 0
#
$ ,
que es la matriz antisimetrica que se emplea para efectuar elproducto vectorial.
Observese que bajo estas hipotesis (angulos pequenos) noimporta el orden de las rotaciones y los angulos se suman.
4 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para la DCM I
Supongamos que quiero calcular la actitud de B respecto a A,mediante la DCM CB
A (t), sabiendo que B gira con respecto aA con una velocidad angular !B
B/A.
Por definicion: ddt C
BA =
CBA (t+dt)"CB
A (t)dt
Suponiendo A fijo, entonces podemos imaginar que es Bquien se mueve en el tiempo, y por tanto podrıamos escribir
B = B(t) y por tanto CBA (t) = CB(t)
A .Usando este razonamiento,CB
A (t + dt) = CB(t+dt)A = CB(t+dt)
B(t) CB(t)A . Por tanto:
A!"B(t)!"B(t + dt)
En el tiempo dt, el sistema de referencia B habra giradorespecto a sı mismo un angulo muy pequeno en cada eje; porlo que hemos visto en la anterior transparencia, por tanto,
CB(t+dt)B(t) = Id!
%d"B
&!, donde d"B es como antes se definio.
5 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para la DCM II
Siguiendo el razonamiento: ddt C
BA =
CBA (t+dt)"CB
A (t)dt =
CB(t+dt)B(t) CB
A (t)"CBA (t)
dt =(Id"(d!B)")CB
A (t)"CBA (t)
dt = !(d!B)"
dt CBA (t)
La matriz(d!B)"
dt se escribirıa
%d"B
&!
dt=
!
"0 !d!3
dtd!2dt
d!3dt 0 !d!1
dt!d!2
dtd!1dt 0
#
$ =
!
"0 !!3 !2
!3 0 !!1
!!2 !1 0
#
$ ,
donde !BB/A = [!1 !2 !3]T ya que d"B representaba el
angulo girado por B en un dt, y por definicion de velocidadangular. Se tiene entonces:
'!B
B/A
(!=
!
"0 !!3 !2
!3 0 !!1
!!2 !1 0
#
$ ,
Por tanto: ddt C
BA = ˙CB
A = !'!B
B/A
(!CB
A .6 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para la DCM III
¿Que sucede si lo que conocemos es !AB/A? Tenemos que
estudiar como se transforman estos operadores'!B
B/A
(!al
cambiar de sistema de referencia.Observese que si z = v $ w , se tiene que en el sdr B,zB =
%vB
&!wB . Por otro lado en el sdr A, se tendra que
zA =%vA
&!wA.
La primera expresion tambien se puede escribir:zB = CB
A zA = CBA
%vA
&!wA = CB
A
%vA
&!CA
B wB , y puestoque esta expresion tiene que ser igual a la anterior:%vB
&!= CB
A
%vA
&!CA
B .
Sustituyendo esto en la ecuacion cinematica: ˙CBA =
!'!B
B/A
(!CB
A = !CBA
'!A
B/A
(!CA
B CBA = !CB
A
'!A
B/A
(!
Finalmente puesto que !B/A = !!A/B : ˙CBA = CB
A
'!A
A/B
(!
7 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para la DCM IV
Otra variacion: trasponiendo ambos miembros de˙CBA = !
'!B
B/A
(!CB
A llegamos a CAB = CA
B
'!B
B/A
(!
En general, la EDC es una ecuacion diferencial matricial, quehabra que resolver componente a componente: nueveecuaciones diferenciales acopladas.El principal problema de resolver numericamente esta ecuaciones garantizar que la matriz resultante de integrar seaortogonal. Observese que en teorıa la ecuacion diferencialrespeta la ortogonalidad: I = (CB
A )(CBA )T , derivando:
)d
dt(CB
A )
*(CB
A )T + CBA
d
dt(CB
A )T
= !'!B
B/A
(!CB
A (CBA )T + CB
A CAB
'!B
B/A
(!
= !'!B
B/A
(!+
'!B
B/A
(!= 0
8 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
La ecuacion de Coriolis
La EDC de la DCM nos permite demostrar la ecuacion deCoriolis que luego sera util:
%ddt v
&A
=%
ddt v
&B
+ !B/A $ vSi escribimos (mecanizamos) esta ecuacion en el sistema de
referencia B: CBA
˙vA = vB +'!B
B/A
(!vB , donde el punto
quiere decir derivada en el mismo sistema de referencia dondeesta escrito.En efecto:
CBA
˙vA = CBA
d
dt(CA
B vB)
= vB + CBA CA
B vB
= vB + CBA CA
B
'!B
B/A
(!vB
= vB +'!B
B/A
(!vB
Esta ecuacion sera utilizada con mucha frecuencia en estetema. 9 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para los angulos de Euler I
Partimos de la definicion de los angulos de Euler:
n"!"zn
S!!"yS
S ##!"
xS#b
La velocidad angular tiene la propiedad de que!b/n = !b/S # + !S #/S + !S/n.
Si mecanizamos esta ecuacion en b:!b
b/n = !bb/S # + !b
S #/S + !bS/n
Por otro lado esta claro que:!b
b/S # = [# 0 0]T , !S #S #/S = [0 " 0]T , !S
S/n = [0 0 $]T .
Luego: !bb/n = !b
b/S # + CbS #!
S #S #/S + Cb
S !SS/n y puesto que
CbS = Cb
S #CS #S , podemos escribir:
!bb/n = !b
b/S # + CbS #!
S #S #/S + Cb
S #CS #S !S
S/n
10 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para los angulos de Euler II
Desarrollando esta ecuacion:
!bb/n =
!
"#00
#
$ +
!
"1 0 00 c# s#0 !s# c#
#
$
!
"0"0
#
$
+
!
"1 0 00 c# s#0 !s# c#
#
$
!
"c" 0 !s"0 1 0s" 0 c"
#
$
!
"00$
#
$
=
!
"#00
#
$ +
!
"0
c#"!s#"
#
$ +
!
"!s"$s#c"$c#c"$
#
$
=
!
"1 0 !s"0 c# s#c"0 !s# c#c"
#
$
!
"#"$
#
$
11 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para los angulos de Euler III
Observese que lo que realmente se quiere es una expresionpara las derivadas de los angulos en funcion de!b
b/n = [!1 !2 !3]T , y por tanto hay que invertir la matriz:
!
"#"$
#
$ =
!
"1 0 !s"0 c# s#c"0 !s# c#c"
#
$"1 !
"!1
!2
!3
#
$
=1
c"
!
"c" s"s# s"c#0 c#c" !s#c"0 s# c#
#
$
!
"!1
!2
!3
#
$
Observese que se trata de 3 ecuaciones diferenciales nolineales, con multitud de funciones trigonometricas.Posee una singularidad para " = ±90o. En realidad losangulos de Euler no estan bien definidos para esta situacion.Esta singularidad es el motivo por el que no se suelen usar ensistemas de navegacion inercial. 12 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para el eje y angulo de Euler
La representacion en forma de eje y angulo de Euler, (ebb/n, "),
tiene las siguientes EDC:
Para el angulo de Euler: " = (ebb/n)
T!bb/n
Para el eje de Euler:
ebb/n =
1
2
)'ebb/n
(!+
1
tan "/2
'Id! eb
b/n(ebb/n)
T(*
!bb/n
Son cuatro ecuaciones diferenciales, no lineales.
Poseen una singularidad para " = 0.
En la practica no se utilizan directamente; las usamos parahallar las EDC para los cuaterniones.
13 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para cuaterniones I
Recordemos la definicion de cuaterniones en funcion de anguloy eje de Euler:q0 = cos "/2, q = sen "/2eb
b/n.Derivando en la ecuacion de q0 y sustituyendo la EDC de ",obtenemos:q0 = !1
2 sen "/2" = !12 sen "/2(eb
b/n)T!b
b/n = !12qT!b
b/nDerivando en la ecuacion de q:
q =1
2cos "/2eb
b/n" + sen "/2ebb/n
Sustituyendo las EDC de angulo y eje de Euler:
q =1
2cos "/2eb
b/n(ebb/n)
T!bb/n
+1
2sen "/2
)'ebb/n
(!+
1
tan "/2
'Id! eb
b/n(ebb/n)
T(*
!bb/n
=1
2
+q! + q0Id
,!b
b/n 14 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
DCMAngulos de EulerCuaterniones
EDC para cuaterniones II
Podemos escribir esta ecuacion en forma matricial:
d
dt
!
--"
q0
q1
q2
q3
#
..$ =1
2
!
--"
!q1 !q2 !q3
q0 !q3 q2
q3 q0 !q1
!q2 q1 q0
#
..$
!
"!x
!y
!z
#
$
donde !bb/n = [!x !y !z ]T .
Son cuatro ecuaciones diferenciales, bilineales, sinsingularidades.
No es necesario realizar ningun tipo de operaciontrigonometrica (senos o cosenos), todo son multiplicacionesmatriciales.
Por estas razones, la representacion mediante cuaterniones esla representacion de actitud mas usada.
15 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuaciones Fundamentales de la Navegacion
Las ecuaciones fundamentales de la navegacion son lasecuaciones del movimiento de la aeronave, expresada en ejesde navegacion.
Puesto que en navegacion es necesario determinar 9 variables(3 de posicion, 3 de actitud, y 3 de velocidad), serannecesarias 9 ecuaciones dadas como 3 conjuntos de 3ecuaciones diferenciales.
El primer conjunto de ecuaciones es la EDC de la actitud, queya hemos visto.
Queda determinar el conjunto de ecuaciones que verifica laposicion y el conjunto de ecuaciones que verifica la velocidad.
La llamada “ecuacion fundamental de la navegacion” (FEN)es la ecuacion vectorial de la velocidad.
16 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuacion Fundamental de la Navegacion I
La segunda ley de Newton aplicada al centro de masas delavion y expresada en el sistema de referencia inercial es:m d
dt vi =
/F = F i
NG + mG i , donde se desprecia la variacionde masa del avion.
Hemos separado las fuerzas en gravitatorias (G ) y nogravitatorias (FNG ).
Es decir: ddt v
i = 1mF i
NG + G i .
La definicion de v i es v i = ddt r
i .
Por otro lado, en el sistema de ejes Tierra, tenemos quev e = d
dt re .
Por tanto: v e = ddt
%C e
i r i&
= C ei r i + C e
iddt r
i = C ei r i + C e
i v i .
Usando la EDC C ei = !
'!e
e/i
(!C e
i llegamos a:
v e = !'!e
e/i
(!C e
i r i + C ei v i .
17 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuacion Fundamental de la Navegacion II
Igualmente, asumiendo la rotacion de la Tierra constante:ddt v
e = !'!e
e/i
(!C e
i r i !'!e
e/i
(!C e
i r i + C ei v i + C e
i v i .
Por tanto:d
dtv e =
'!e
e/i
(! '!e
e/i
(!C e
i r i !'!e
e/i
(!C e
i v i !'!e
e/i
(!C e
i v i
+C ei v i
='!e
e/i
(! '!e
e/i
(!r e ! 2
'!e
e/i
(!C e
i v i + C ei v i
Puesto que v e = !'!e
e/i
(!C e
i r i + C ei v i , se tiene que
C ei v i = v e +
'!e
e/i
(!r e . Por tanto:
d
dtv e =
'!e
e/i
(! '!e
e/i
(!r e ! 2
'!e
e/i
(!v e + C e
i v i
El primer termino representa la aceleracion centrıfuga acent y
el segundo la de Coriolis, luego aecent =
'!e
e/i
(! '!e
e/i
(!r e .
18 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuacion Fundamental de la Navegacion IIISustituyendo la Ley de Newton en la ecuacion antes obtenida:
d
dtv e = ae
cent ! 2'!e
e/i
(!v e + C e
i
01
mF i
NG + G i
1
= aecent ! 2
'!e
e/i
(!v e +
1
mF e
NG + G e
Finalmente recordemos que la aceleracion del geopotencial sedefinıa como g = G + acent, llegamos a:
d
dtv e = !2
'!e
e/i
(!v e +
1
mF e
NG + g e
Finalmente, en ejes navegacion n y puesto que vn = Cne v e :
d
dtvn = Cn
e v e + Cne
d
dtv e
= !'!n
n/e
(!Cn
e v e + Cne
0!2
'!e
e/i
(!v e +
1
mF e
NG + g e
1
19 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuacion Fundamental de la Navegacion IV
Es decir:d
dtvn = !
'!n
n/e
(!vn ! 2Cn
e
'!e
e/i
(!v e +
1
mF n
NG + gn
Y puesto que v e = C en vn:
d
dtvn = !
'!n
n/e
(!vn ! 2Cn
e
'!e
e/i
(!C e
n vn +1
mF n
NG + gn
Recordemos que para el “operador producto vectorial”, secumple que C a
b
%zb
&!Cb
a = (za)!. Por tanto la FEN queda:
d
dtvn = !
'!n
n/e
(!vn ! 2
'!n
e/i
(!vn +
1
mF n
NG + gn
= !'!n
n/e + 2!ne/i
(!vn +
1
mF n
NG + gn
La FEN es una ecuacion totalmente expresada(“mecanizada”) en ejes n. vn es lo que se quiere estimar.Observemos no obstante que son necesarios !n
n/e y !ne/i .
20 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Velocidades angulares entre sistemas de referencias
Necesitamos obtener valores para !nn/e y !n
e/i .En primer lugar consideremos el caso simple de que & = 0,por tanto g = n.Recordemos las matrices de transformacion:
Cei =
2
4cωE t sωE t 0!sωE t cωE t 0
0 0 1
3
5 , Cge =
2
4!sφcλ !sφsλ cφ!sλ cλ 0!cφcλ !cφsλ !sφ
3
5
Recordemos que !ee/i = [0 0 !E ]T .
Por tanto:
!ge/i = C g
e !ee/i =
!
"!Ec%
0!!E s%
#
$
Por otro lado siguiendo el procedimiento con el que se hallaron
las DCM para angulos de Euler, llegamos a !gg/e =
!
"'c%!%!'s%
#
$
21 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Velocidades angulares entre sistemas de referencias conangulo de deriva
Si ahora & %= 0, recordemos la matriz de transformacion:
Cng =
2
4cα sα 0!sα cα 0
0 0 1
3
5
Por tanto: !ne/i = Cn
g !ge/i =
!
"!Ec%c&!!Ec%s&!!E s%
#
$
Igualmente !ng/e = Cn
g !gg/e =
!
"'c%c&! %s&!'c%s&! %c&
!'s%
#
$
Finalmente
!nn/e = !n
g/e + !nn/g = !n
g/e +
!
"00&
#
$ =
!
"'c%c&! %s&!'c%s&! %c&!'s% + &
#
$
22 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
Ecuaciones Diferenciales Cinematicas de la Posicion I
Necesitamos obtener ecuaciones para ', % y h; tambien para&, si se usa un angulo de deriva.
En primer lugar para simplificar consideremos el caso massimple posible: no hay angulo de deriva (& = 0 luego n = g) yla Tierra es esferica de radio Re .
En tal caso, se tiene: ˙r e = v e . Expresado en ejes g :r e = C e
g rg . El valor de rg = [0 0 ! (Re + h)]T .
Se tiene: vg = C ge v e = C g
e ˙r e = C ge C e
g rg + C ge C e
g˙rg =
!C ge
'!e
e/g
(!C e
g rg + ˙rg ='!g
g/e
(!rg + ˙rg
Por otro lado vg = [vx vy vz ]T = [vN vE vD]T . La ecuacionmatricial queda:
2
4vNvEvD
3
5 =
2
40 λsφ !φ
!λsφ 0 !λcφφ λcφ 0
3
5
2
400
!Re ! h
3
5 +
2
400!h
3
5
23 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
EDC de la Posicion IIDesarrollando:
vN = φ(Re + h)
vE = λcφ(Re + h)
vD = !h
Es decir:φ =
vN
Re + h
λ =vE
cφ(Re + h)
h = !vD
Estas ecuaciones me permiten obtener la posicion conocida lavelocidad en todo instante. Observese que son singulares en% = ±90o.Por ese motivo se introduce el azimuth de deriva.
Sustituyendo en !gg/e obtenemos: !g
g/e =
!
-"
vERe+h! vN
Re+h
! vE tan $Re+h
#
.$
24 / 28

Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
EDC de la Posicion: caso elipsoidal
En el caso elipsoidal se tiene
φ =vN
RM + h
λ =vE
cφ(RN + h)
h = !vD
Donde RN y RM son respectivamente los radios locales decurvatura normal (de un paralelo) y meridional (delmeridiano), que fueron definidos en el primer tema; dichosradios dependen de la latitud en la que se encuentre el avion.
Y por tanto: !gg/e =
!
-"
vERN+h
! vNRM+h
! vE tan $RN+h
#
.$
25 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
EDC de la Posicion con Azimuth de Deriva I
Trabajamos con tierra esferica. Si & %= 0 entonces n %= g y launica ecuacion que se mantiene es h = !vD, mientras que elresto de las ecuaciones cambian.Si escribimos vn = [vx vy vD]T y !n
n/e = [(x (y (z ]T ,siguiendo el mismo procedimiento de antes hallamos:
vn ='!n
n/e
(!rn + ˙rn
La ecuacion matricial queda:2
4vxvyvD
3
5 =
2
40 !ρz ρyρz 0 !ρx!ρy ρx 0
3
5
2
400
!Re ! h
3
5 +
2
400!h
3
5
donde recordemos que ya calculamos (x = 'c%c&! %s&,(y = !'c%s&! %c&, (z = !'s% + &.Se llega a:
vx =“
λcφsα + φcα”
(Re + h)
vy =“
λcφcα ! φsα”
(Re + h)
vD = !h
26 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
EDC de la Posicion con Azimuth de Deriva IIDespejando % y ':
φ =vx cos α ! vy sen α
Re + h
λ =vx sen α + vy cos α
cos φ(Re + h)
h = !VD
Usando estas definiciones en !nn/e se llega a:
ωnn/e =
2
4λcφcα ! φsα!λcφsα ! φcα!λsφ + α
3
5 =
2
664
vyRe+h! vx
Re+h
! vx sen !+vy cos !cos "(Re+h)
tanφ + α
3
775 , donde & se
puede elegir como se quiera.Se suele fijar por definicion & = 's% = vx sen %+vy cos %
cos $(Re+h) tan%,
de donde: !nn/e =
!
"vy
Re+h! vx
Re+h0
#
$ ,
Observese que ha desaparecido la singularidad en !nn/e ! (a
costa de un grado de libertad adicional, &).27 / 28
Ecuaciones Diferenciales Cinematicas de la ActitudEcuaciones Fundamentales de la Navegacion
VelocidadVelocidades angulares entre sistemas de referenciaPosicion
EDC de la Posicion con Azimuth de Deriva III
Usando & se mantiene la singularidad a la hora de calcular ',pero al menos se puede seguir computando !n
n/e , que esnecesaria para poder calcular vn.Interpretacion fısica: Esta definicion de & equivale a tener unaplataforma a bordo, a la que se permite girar en lasdirecciones xn y yn pero se le impide girar en zn. El anguloque forma una direccion fija de la plataforma con el N serıa &.Observacion: puesto que la posicion viene dada por losangulos (%, ',&), se puede tratar como una “actitud”, Cn
e .En tal caso las ecuaciones cinematicas de la posicion podrıan
darse como EDC de actitud, por ejemplo Cne = !
'!n
n/e
(!Cn
e
o incluso tratarse como cuaterniones.Ası eliminamos totalmente la singularidad, y podemossobrevolar cualquier punto del planeta.En cualquier caso habrıa que anadir la ecuacion para laaltitud, h = !vD. 28 / 28

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Navegacion AereaTema 4: Sistema de navegacion autonomo. Navegacion inercial.
Errores.
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Sistema de navegacion autonomo: Navegacion inercial.
La navegacion autonoma es aquella que no depende demedidas externas y por tanto no es susceptible a interferencias(accidentales o provocadas) ni a manipulacion o error externo.
El ejemplo mas temprano es la navegacion a estima que ya sevio en la introduccion historica. En aviacion se emplea lanavegacion inercial.
El objeto de la navegacion inercial es determinar la posicion,velocidad y actitud de la aeronave, con la mayor precisionposible, a paritr de las medidas de la IMU (InertialMeasurement Unit).
La IMU se compone de sensores inerciales: giroscopos yacelerometros.
Para la navegacion inercial, ademas de la IMU, es necesariauna estimacion inicial (fix) de posicion, velocidad y actitud.
2 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Historia de la navegacion inercial I
Historicamente la navegacion inercial no nace hasta el sigloXX.Sus antecedentes se encuentran en la navegacion a estima (yaestudiada) y en la invencion de los primeros giroscopos.Los giroscopos se inventaron en el siglo XIX; fue Leon Focaultquien les dio su nombre, popularizandolo gracias a unexperimento (fracasado) en el que los uso para tratar dedemostrar la rotacion de la Tierra.
Un giroscopo mantiene su eje de rotacion (en elespacio inercial) frente a perturbaciones. Este efectose conoce como rigidez giroscopica.Dichas perturbaciones generan un movimiento deprecesion y nutacion, que se puede medir.Por ejemplo, al forzar la rotacion de un giroscopo enun eje distinto a su eje de giro, se produce un efectoque permite estimar la velocidad de rotacion.
3 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Historia de la navegacion inercial II
Por tanto los giroscopos tienen un eje en tornoal cual giran permanentemente, otro eje en elcual se detectan perturbaciones y otro eje en elcual se miden dichas perturbaciones.Las plataformas giroestabilizadas se basan eneste fenomeno, son plataformas insensibles aperturbaciones que permiten diversasaplicaciones, como por ejemplo emplear unacamara de television en un helicoptero.Otra aplicacion del efecto es el girocompas obrujula giroscopica, que permite encontrar elNorte geografico.
Modernamente, se emplean giroscopos nomecanicos, mas sofisticados que empleandiversos efectos fısicos.
4 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Historia de la navegacion inercial IIIEn la II Guerra Mundial, se emplearongiroscopos y acelerometros por primera vez,para guiar misiles V-2.
La invencion de este sistema de guiado se debea un estadounidense, Robert Goddard.
Tras la guerra, hubo un rapido desarrollo. Losprimeros sistemas de navegacion inercialconsistıan en una triada de acelerometros ygiroscopos montados en una plataforma, capazde rotar y orientarse con libertad.
Se disena la plataforma de manera que siempremantenga su orientacion respecto a un sistemade referencia dado (g o n).
Por tanto medimos directamente anNG y Cn
b .Estos sistemas a veces se llamansemianalıticos. 5 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Historia de la navegacion inercial IVEstos sistemas son funcionales en cualquier sitio de laTierra: tierra, aire, oceanos, bajo el agua...
Con navegacion inercial el submarino USS Nautiluscruzo bajo el hielo y paso por el polo Norte en 1958.
Sin embargo es muy costoso, contiene elementos mecanicosque se desgastan, requiere una perfecta alineacion inicial(lenta), y presenta problemas de bloqueo de los gimbals(gimbal lock) si se alinean los ejes de rotacion.
El sistema inercial mas sofisticado que se creo fue elAIRS-Advanced Inertial Reference Sphere, que consiste enuna esfera hueca con un fluido donde flota otra esfera congiroscopos y acelerometros.
Mantiene (mediante inyeccion de chorros) siempre una referenciainercial, con lo que se mide ai
NG (que se puede integrardirectamente) y C b
i . Por esto se llama geometrico o analıtico.Su coste era enorme, pero se obtiene una gran precision, con unaderiva de 105 grados por hora (1,15o por ano). Se uso en misilesbalısticos y en bombarderos. 6 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Historia de la navegacion inercial V
En 1956 se patenta la idea del INS “strapdown”, es decir, fijo(fijado al cuerpo).
En este caso los sensores inerciales miden las magnitudes enejes cuerpo, es decir, !b
b/i y abNG . Este tipo se sistema INS se
denomina “analıtico” o de plataforma analıtica, porquerealmente no existe una plataforma y todo se realiza mediantecalculo numerico.
Requiere el uso de ordenadores de gran capacidad de computoy de sensores precisos (por las vibraciones). Eso solo fueposible a partir de los 70.
Hoy en dıa es el unico que se usa en la practica.
Ademas, gracias a la navegacion integrada (complementar elINS con otros sistemas como el GPS) se pueden emplearsensores de baja calidad, con lo que el coste se ha abaratadoenormemente.
7 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
La IMU: sensores inerciales.
Una IMU consta de giroscopos y acelerometros. Estosdispositivos han sido estudiados en otras asignaturas.Un modelo tıpico de medida serıa: m = (1 + ")m + b + #,donde m es la medida obtenida del valor real m, " es el factorde escala, b es el sesgo y # es ruido de medida. Estos valoresse pueden calibrar pero estan sujetos a variaciones.Las principales caracterısticas de estos dispositivos son:
Ancho de banda: determina la frecuencia maxima deaceleracion o giro que son capaces de detectar. Se asimila a la“velocidad” maxima con la que se toman medidas.Rango de medicion.Supervivencia a choques.Ruido (en unidades de medida por
√Hz). Mide #. Se puede
usar para calcular como se degrada la medida acumulada.Inestabilidad del sesgo (en unidades de medida). Mide el ruidoaleatorio que entra en b.Inestabilidad del factor de escala (en porcentaje). Mide el ruidoaleatorio que entra en $. 8 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Acelerometros.
Precisiones tıpicas de acelerometros:
9 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Giroscopos
Precisiones tıpicas de giroscopos (RLG=Ring Laser Gyro,FOG=Fibre Optic Gyro, MEMS=Micro-Electro-MechanicalSystems).
10 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Los acelerometros y la gravedad I
Un acelerometro no puede medir g .Principio de funcionamiento de un acelerometro: medir eldesplazamiento de una masa testigo. Ejemplo con muelle:
Se cumple que mx = F − kx , donde k es la constante delmuelle y F la fuerza en la direccion del eje. Puesto queF = ma, donde a es la aceleracion en la direccion del eje, setiene que a = k/m · x + x .Suponiendo que a es aproximadamente constante, x tiende auna posicion de equilibrio que cumple a = k/m · x , y portanto a es proporcional a x .Otros acelerometros mas sofisticados no requieren esperar aque se llegue al estado de equilibrio, por ejemplo compensandoF con una fuerza contraria para que nunca se desplace x .
11 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Los acelerometros y la gravedad II
¿Que sucede si el eje esta en la misma direccion de lagravedad?
Supongamos que el objeto esta en caıda libre. Para aplicar laLey de Newton tenemos que estar en un sistema de referenciainercial, pero puesto que el objeto esta en caıda libre, tenemosque tener en cuenta que el sistema de referencia fijo en elcuerpo es no inercial!Por tanto: m(x − g) = F − kx . Por otro ladoF = m(aNG − g). Por tanto, en el equilibrio: aNG = k/m · x .
12 / 49
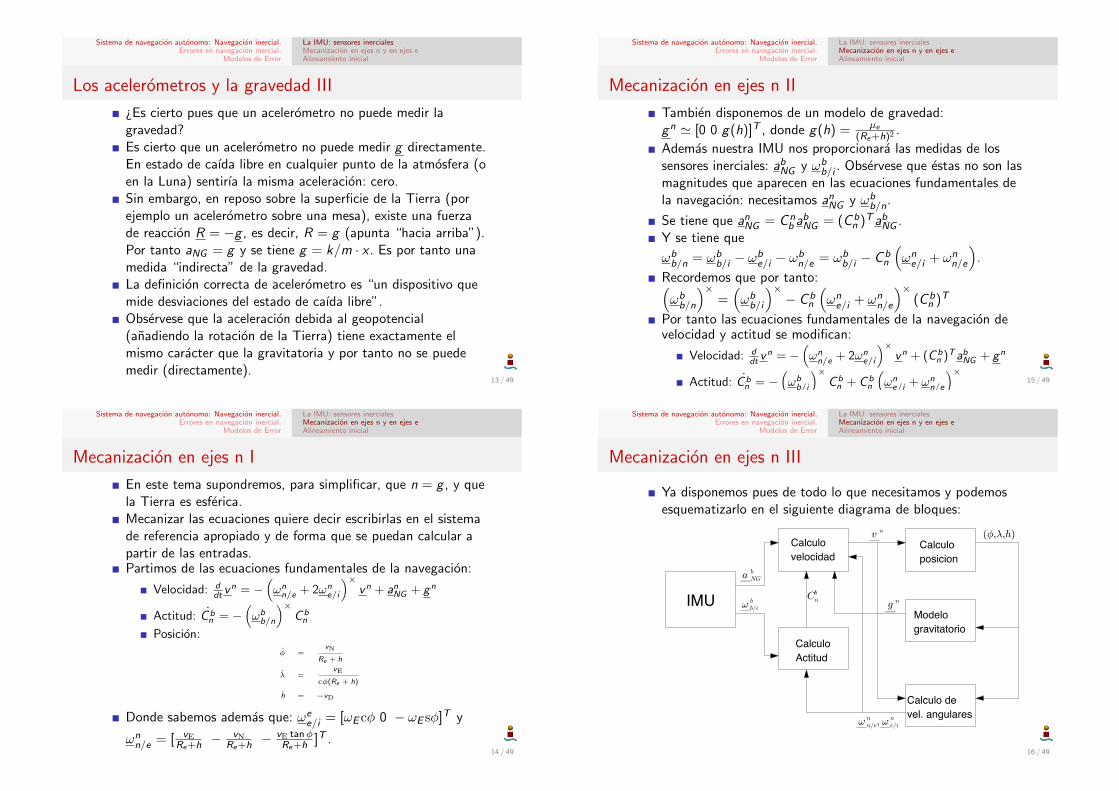
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Los acelerometros y la gravedad III
¿Es cierto pues que un acelerometro no puede medir lagravedad?Es cierto que un acelerometro no puede medir g directamente.En estado de caıda libre en cualquier punto de la atmosfera (oen la Luna) sentirıa la misma aceleracion: cero.Sin embargo, en reposo sobre la superficie de la Tierra (porejemplo un acelerometro sobre una mesa), existe una fuerzade reaccion R = −g , es decir, R = g (apunta “hacia arriba”).Por tanto aNG = g y se tiene g = k/m · x . Es por tanto unamedida “indirecta” de la gravedad.La definicion correcta de acelerometro es “un dispositivo quemide desviaciones del estado de caıda libre”.Observese que la aceleracion debida al geopotencial(anadiendo la rotacion de la Tierra) tiene exactamente elmismo caracter que la gravitatoria y por tanto no se puedemedir (directamente).
13 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Mecanizacion en ejes n I
En este tema supondremos, para simplificar, que n = g , y quela Tierra es esferica.Mecanizar las ecuaciones quiere decir escribirlas en el sistemade referencia apropiado y de forma que se puedan calcular apartir de las entradas.Partimos de las ecuaciones fundamentales de la navegacion:
Velocidad: ddt v
n = −(!n
n/e + 2!ne/i
)!vn + an
NG + gn
Actitud: C bn = −
(!b
b/n
)!C b
n
Posicion:
! =vN
Re + h
" =vE
c!(Re + h)
h = !vD
Donde sabemos ademas que: !ee/i = [!Ec% 0 − !E s%]T y
!nn/e = [ vE
Re+h − vNRe+h − vE tan !
Re+h ]T .14 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Mecanizacion en ejes n II
Tambien disponemos de un modelo de gravedad:gn # [0 0 g(h)]T , donde g(h) = µe
(Re+h)2 .
Ademas nuestra IMU nos proporcionara las medidas de lossensores inerciales: ab
NG y !bb/i . Observese que estas no son las
magnitudes que aparecen en las ecuaciones fundamentales dela navegacion: necesitamos an
NG y !bb/n.
Se tiene que anNG = Cn
b abNG = (Cb
n )TabNG .
Y se tiene que
!bb/n = !b
b/i − !be/i − !b
n/e = !bb/i − Cb
n
(!n
e/i + !nn/e
).
Recordemos que por tanto:(!b
b/n
)!=
(!b
b/i
)!− Cb
n
(!n
e/i + !nn/e
)!(Cb
n )T
Por tanto las ecuaciones fundamentales de la navegacion develocidad y actitud se modifican:
Velocidad: ddt v
n = −(!n
n/e + 2!ne/i
)!vn + (C b
n )TabNG + gn
Actitud: C bn = −
(!b
b/i
)!C b
n + C bn
(!n
e/i + !nn/e
)!15 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Mecanizacion en ejes n III
Ya disponemos pues de todo lo que necesitamos y podemosesquematizarlo en el siguiente diagrama de bloques:
IMU
!!"#"$"
%
#&
'()%
#*"%('
%
#*
%+,
+()+
#*
-.+
#/
%
#0
Calculo de
vel. angulares
Modelo
gravitatorio
Calculo
Actitud
posicion
Calculovelocidad
Calculo
16 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Mecanizacion en ejes e
En ocasiones, por motivos de integracion INS-GPS, convienemecanizar las ecuaciones en los ejes e (en los que trabaja elGPS).
Se llega a las siguientes ecuaciones para velocidad y posicion:
Velocidad: ddt v
e = −2(!e
e/i
)!v e + ae
NG + g e =
−2(!e
e/i
)!v e + (C n
e )T (C bn )Tab
NG + g e
Posicion: ddt r
e = v e .
Habrıa que escribir Cne en funcion de r e y v e , escribir un
modelo de g e , y escribir la ecuacion de la actitud, y se llegarıaa un esquema similar al anterior.
17 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Alineamiento inicial I
Supongamos que tenemos el avion en reposo en unaeropuerto, y es necesario inicializar el INS con un “fix”.¿Como se harıa?Evidentemente, se tiene que %, & y h son las del aeropuerto, oincluso con mayor precision, las tomadas de un sistema GPS.Puesto el avion esta en reposo, vn = 0.Queda encontrar el valor inicial de actitud, es decir,Cb
n (t = 0). Para ello se usa la medida obtenida de giroscoposy acelerometros (en reposo).De la ecuacion fundamental de la navegacion se tiene:
0 = −(!n
n/e + 2!ne/i
)!0 + an
NG + gn, luego anNG = −gn y
por tanto abNG = Cb
n anNG = −Cb
n gn.
Por otro lado es claro que !bb/n = !b
b/i − !be/i − !b
n/e y
evidentemente !bb/n = 0 y !b
n/e = 0.
Por tanto:!bb/i = !b
e/i = Cbn !n
e/i . 18 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Alineamiento inicial II
Tenemos por tanto dos ecuaciones: abNG = −Cb
n gn y
!bb/i = Cb
n !ne/i . Llamando a las medidas xb
1 = abNG y
xb2 = !b
b/i , y denotando los modelos como yn1
= −gn yxn
2 = !ne/i , se tiene que
xn1 = Cb
n (0)yb1, xn
2 = Cbn (0)yb
2
Tendrıamos 6 medidas (las componentes de dos vectores) para9 grados de libertad (las entradas de la matriz).
Es necesario pues “generar” una medida adicionalindependiente.
19 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
La IMU: sensores inercialesMecanizacion en ejes n y en ejes eAlineamiento inicial
Alineamiento inicial III
Llamemos x3 = x1 × x2. Observese que este vector se puede
escribir como(xb
1
)!xb
2 en el sistema de referencia b, donde Xes la matriz antisimetrica que representa el producto vectorial.
Por otro lado se tiene que(xb
1
)!= Cb
n (0)(yn
1
)!Cn
b (0). Por
tanto xb3 =
(xb
1
)!xb
2 = Cbn (0)
(yn
1
)!Cn
b (0)Cbn (0)yn
2=
Cbn (0)
(yn
1
)!yn
2. Por tanto denotando y
3= y
1× y
2, se tiene
que xb3 = Cb
n (0)yn3.
Escribiendo la matriz A como la matriz cuyas columnas sonxb
1, xb2 y xb
3, y la matriz B como la matriz cuyas columnas sonyn
1, yn
2y yn
3, se tiene: A = Cb
n (0)B y por tanto Cbn (0) = AB"1.
No se han tenido en cuenta los errores de medida: Cbn (0)
probablemente no saldrıa ortonormal (habrıa que emplear unalgoritmo mas sofisticado que tuviera en cuenta los errores demedida).
20 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Errores en navegacion inercial.
Si conocieramos con total precision las condiciones iniciales, elmodelo de gravedad fuera perfecto, y los sensores inerciales nocometieran errores de medida, entonces la navegacion inercialserıa totalmente exacta.No obstante, esto no es ası, y cada uno de los terminosmencionados contiene errores.
Errores en condiciones iniciales.Errores en el modelo de gravedad 'gn.Errores en los sensores inerciales. Para simplificar losagruparemos en un unico valor: 'ab
NG , '!bb/i .
La navegacion inercial realiza integracion de ecuacionesdiferenciales, luego estos errores se van acumulando.Es importante tener un modelo del error para saber comocrece, para cuantificarlo, para aplicar medidas que permitandisminuirlo (como integracion con otros sensores), paradescubrir que sensores son mas crıticos (analisis desensibilidad), etc... 21 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Variables de error.
En general, para una variable cualquiera de navegacion x , sedenota con x el valor estimado con el INS.
Puesto que este valor no sera exacto se define el error como'x = x − x .
Error en posicion: las variables de posicion son %, & y h. Lasvariables estimadas seran %, &, h. Definimos el error enposicion 'p como 'p = ['% '& 'h]T = [%− % &− & h− h]T .
Error en velocidad: igualmente se define 'vn = vn − vn, dondevn es la velocidad calculada por el INS.
Para la actitud, ¿como definir un error en la matriz de actitud'Cb
n ?
Lo que se hace es suponer que el INS estima una actitud delos ejes cuerpo b que denotaremos por b.
22 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Error de actitud.
Por tanto, realmente Cbn = C b
n , donde se tiene que:
n(",#,$)−→ b
%!x−→xb
S1%!y−→yS1
S2%!z−→zS2
b
Por tanto Cbn = C b
n = C bb Cb
n .Suponiendo que los errores '% = ['%x '%y '%z ]T son
pequenos, se vio que C bb = Id− '%!, donde como siempre:
'%! =
0 −'%z '%y
'%z 0 '%x
−'%y '%x 0
Por tanto, se encuentra el error en la matriz de actitud como'Cb
n = Cbn −Cb
n = Cbn −C b
b Cbn = Cb
n −(Id−'%!)Cbn = '%!Cb
n .Tambien'Cb
n = '%!Cbn = '%!Cb
bC b
n = '%!(Id + '%!)Cbn # '%!Cb
n .23 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Ecuaciones de propagacion del error
Se quiere estudiar como evoluciona el error del INS con eltiempo. Para ello, es necesario encontrar el modelo depropagacion del error.
Este modelo se encuentra directamente de las ecuaciones dela navegacion inercial, suponiendo que los errores sonpequenos, con lo que las ecuaciones se pueden linealizar.
Por ejemplo, supongamos que x es una variable que el INSestima como x . La ecuacion que verifica x sera x = f (x). ElINS lo que hara sera calcular x a partir de ˙x = f (x). Portanto: 'x = x − ˙x = f (x)− f (x) = f (x + 'x)− f (x).
Desarrollando esta expresion en serie de Taylor y quedandonosel termino constante y el lineal: f (x + 'x) # f (x) + &f
&x |x=x'x .
Por tanto llegamos a la siguiente expresion: 'x = &f&x |x=x'x ,
que es aproximada y solo sirve para 'x pequeno.
24 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en posicion I
Se tiene que las ecuaciones de la posicion son:
! =vN
Re + h
" =vE
c!(Re + h)
h = !vD
Por tanto el INS calculara:
˙! =vN
Re + h
˙" =vE
c!(Re + h)
˙h = !vD
Aplicando la teorıa antes desarrollada, por ejemplo, para h:
'h = h − ˙h = −vD + vD = −'vD. Como la ecuacion ya eralineal no hubo que linealizar.
25 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en posicion II
Para la latitud: '% = %− ˙% = vNRe+h −
vN
Re+h= vN+%vN
Re+h+%h− vN
Re+h.
Desarrollando en serie de Taylor y quedandonos hasta eltermino lineal: vN+%vN
Re+h+%h= vN
Re+h+ 1
Re+h'vN − vN
(Re+h)2'h
Por tanto: '% = 1Re+h
'vN − vN
(Re+h)2'h.
Operando igualmente con la longitud:
'& = 1c!(Re+h)
'vE − vE
c!(Re+h)2'h + vE tan !
c!(Re+h)'%
Poniendolo todo en una matriz:
#p =d
dt
2
4#!#"#h
3
5 =
2
6664
0 0 ! vN(Re+h)2
1Re+h
0 0
vE tan !
c!(Re+h)0 ! vE
c!(Re+h)20 1
c!(Re+h)0
0 0 0 0 0 !1
3
7775
2
666664
#!#"#h
#vN#vE#vD
3
777775
26 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en posicion III
El resultado se puede escribir abreviadamente como'p = Cpp'p + Cpv'vn, donde:
Cpp =
0 0 − vN
(Re+h)2
vE tan !c!(Re+h)
0 − vE
c!(Re+h)2
0 0 0
,
Cpv =
1Re+h
0 0
0 1c!(Re+h)
0
0 0 −1
27 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Errores en velocidad angular
Para repetir el procedimiento con las ecuaciones de velocidady actitud necesitamos antes encontrar el error en !n
e/i y en!n
n/e que denotaremos como '!ne/i y '!n
n/e .En primer lugar se tiene que:
!ne/i =
!Ec%
0−!E s%
→ '!ne/i =
−!E s%
0−!Ec%
'%
Por otro lado: !nn/e =
vE
Re+h
− vN
Re+h
− vE tan !Re+h
, por tanto:
'!nn/e =
1Re+h
'vE − vE
(Re+h)2'h
− 1Re+h
'vN + vN
(Re+h)2'h
−1 tan !Re+h
'vE − vE tan !(Re+h)2
'h − vE(1+tan2 !)
Re+h'%
28 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en velocidad I
Las ecuaciones de la velocidad que calcula el INS seran:ddt v
n = −(!n
n/e + 2!ne/i
)!vn + (Cb
n )T abNG + gn
Por tanto las ecuaciones del error seran:
d
dt'vn = −
('!n
n/e + 2'!ne/i
)!vn −
(!n
n/e + 2!ne/i
)!'vn
+('Cbn )T ab
NG + (Cbn )T 'ab
NG + 'gn
Recordemos que 'Cbn = '%!Cb
n . Los otros terminos los hemoscalculado, excepto 'ab
NG (el error en los acelerometros) y 'gn
(el error en el modelo gravitatorio).Puesto que
gn #
00µe
(Re+h)2
→ 'gn =
00
− 2µe
(Re+h)3
'h + 'Gn, donde
'Gn son errores en el modelado gravitatorio.29 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en velocidad II
Por tanto podremos escribir, como en el caso de la posicion,'vn = Cvp'p + Cvv'vn + Cv!'% + Ca'ab
NG + 'Gn.
Es una ecuacion lineal en los errores, donde las matrices estandefinidas en funcion de la estimacion del INS, y con dosterminos forzantes: el error en los acelerometros 'ab
NG y elerror en el modelo gravitatorio 'Gn.
30 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en actitud I
Finalmente, calculamos el error en actitud.Recordemos que 'Cb
n = '%!Cbn , por tanto se tiene que
'Cbn = '%!Cb
n + '%! ˙Cbn = '%!Cb
n − '%!(!b
b/n
)!Cb
n .
Por otro lado ˙Cbn = −
(!b
b/n
)!Cb
n , y por tanto
'Cbn = −
('!b
b/n
)!Cb
n −(!b
b/n
)!'%!Cb
n .
De donde llegamos a '%!Cbn − '%!
(!b
b/n
)!Cb
n =
−('!b
b/n
)!Cb
n −(!b
b/n
)!'%!Cb
n , o lo que es lo mismo:
'%! = −('!b
b/n
)!+ '%!
(!b
b/n
)!−
(!b
b/n
)!'%!.
Usando la identidad a× (b× c)+ c × (b× a)+b× (c × a) = 0llegamos a a× (b × c)− b × (a× c) = (b × a)× c . Estoimplica que a!b!c − b!a!c = (b!a)!c , por lo quea!b! − b!a! = (b!a)!.
31 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error en actitud II
Es decir, finalmente: '%! = −('!b
b/n
)!+
('%!!b
b/n
)!. De
donde: '% = −'!bb/n + '%!!b
b/n.
Como por otro lado, !bb/n = !b
b/i − Cbn
(!n
e/i + !nn/e
), se
obtiene que
'!bb/n = '!b
b/i − 'Cbn
(!n
e/i + !nn/e
)− Cb
n
('!n
e/i + '!nn/e
).
Por tanto finalmente la ecuacion del error de actitud queda:
'% = −'!bb/i + '%!Cb
n
(!n
e/i + !nn/e
)− Cb
n
('!n
e/i + '!nn/e
)
+'%!!bb/i − '%!Cb
n
(!n
e/i + !nn/e
)
= −'!bb/i − Cb
n
('!n
e/i − '!nn/e
)+ '%!!b
b/i
32 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Propagacion del error del INS.
Por tanto podremos escribir, como antes,'% = C!p'p + C!v'vn + C!!'%− '!b
b/i .Es una ecuacion lineal en los errores, donde las matrices estandefinidas en funcion de la estimacion del INS, y con unterminos forzante: el error en los giroscopos '!b
b/i .Si ponemos todos los errores juntos, llegamos a:
d
dt
'p'vn
'%
=
Cpp Cpv 0Cvp Cvv Cv!
C!p C!v C!!
'p'vn
'%
+
0
Ca'abNG + 'Gn
−'!bb/i
Ademas estaran las condiciones iniciales:
'p'vn
'%
(t = 0).
Este es el modelo de propagacion del error del INS. Puestoque el termino forzante es desconocido (y se modela mediantela estadıstica) es una ecuacion diferencial estocastica.
33 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Ecuacion del error en el canal vertical I
Si trabajamos solo con el error en h y VD , y despreciamostodos los terminos excepto el gravitatorio, llegamos a lasiguiente ecuacion:
'h = −'VD
'VD # −2µe
(Re + h)3'h.
Por otro lado podemos aproximar en el denominadorRe + h # Re . Teniendo en cuenta que la aceleracion de lagravedad al nivel del mar g0 = µe
R2e, tendrıamos las ecuaciones:
'h = −'VD
'VD # −2g0
Re'h.
Escribiendolo como una unica ecuacion para 'h: 'h = 2g0Re
'h.34 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Variables de error. Error en actitudModelo de propagacion linealizadoEl canal vertical
Ecuacion del error en el canal vertical II
La solucion de la ecuacion diferencial es:
'h = C1eq
2g0Re
t+ C2e
"q
2g0Re
t, donde las constantes son funcion
de las condiciones iniciales de altura y velocidad vertical.
Estas ecuaciones son inestables! El primer termino crece hastael infinito.
Fısicamente, lo que sucede es lo siguiente: si hay un error dealtitud, p.ej. el INS piensa que el avion esta mas alto de loque realmente esta, el modelo de gravedad predice que lagravedad es menor de lo que es, con lo que el INS predice queel avion se eleva, es decir, el error inicial se amplifica!
Este resultado se mantiene si no se desprecian los terminosque no se han considerado. Por tanto el canal vertical del INSes inestable y no se puede usar por sı solo; empleando otrasmedidas (p.ej. barometricas) es posible compensar el canalvertical y obtener una medida fiable de la altura.
35 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Fuentes de Error
Hemos visto que las ecuaciones de propagacion del error sondel tipo 'x = A(x)'x + '(, donde 'x son las variables denavegacion (posicion, velocidad, actitud) y los '( las fuentesde error. Estas fuentes son:
Errores en el modelo de gravedad 'gn.
Errores en los sensores inerciales 'abNG , '!b
b/i .
Aparte esta el error en las condiciones iniciales 'x(t0).
Si discretizamos estas ecuaciones en el tiempo, podrıamosescribir un modelo algo mas sencillo:'x(tk+1) = A(tk)'x(tk) + '((tk).
¿Como se modelan los errores? ¿Como se interpretan lasecuaciones que contienen errores?
Para responder a estas preguntas es necesario recordaralgunos conceptos estadısticos.
36 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Descripcion estadıstica del error
Consideremos por ejemplo el caso del error de medida de unacelerometro: ab
NG = abNG + 'ab
NG , donde 'abNG son errores de
medida.
Una componente de 'abNG , por ejemplo 'ax , puede tener el
siguiente aspecto:
Es imposible conocer el valor con exactitud.
Se observa que cambia con el tiempo.
Por tanto, se representan sus propiedades usando laestadıstica.
37 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Variables aleatorias continuas unidimensionales
Sea una variable aleatoria X ∈ R continua.
Recordemos que la funcion de distribucion F (x) es laprobabilidad de que X ≤ x , que se escribe comoF (x) = P(X ≤ x).
La funcion de distribucion se calcula mediante la funcion dedensidad f (x): F (x) =
∫ x"# f (y)dy .
Se define el operador esperanza matematica actuando sobre lafuncion g(x) como E [g(X )] =
∫#"# g(y)f (y)dy . Se trata de
un operador lineal, de forma queE [)1g1(X ) + )2g2(X )] = )1E [g1(X )] + )2E [g2(X )]. Los doscasos importantes son:
Media: m(X ) = E [X ] =∫"#" yf (y)dy .
Varianza: V (X ) = E [(X −m(X ))2] = E [X 2]− (E [X ])2.Desviacion tıpica ", la raız cuadrada de la varianza," =
√V (X ).
38 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Distribucion normal o gaussiana I
Es la distribucion mas usada en estadıstica. Se escribeX ∼ N(m, "2) y su funcion de densidad es
f (x) = 1'$
2(Exp
(− (x"m)2
2'2
).
Intervalos de confianza: si X ∼ N(m, "2):Intervalo 1-": P(X ∈ [m − ", m + "]) = 68,3 %.Intervalo 2-": P(X ∈ [m − 2", m + 2"]) = 95,45 %.Intervalo 3-": P(X ∈ [m − 3", m + 3"]) = 99,74 %.
39 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Distribucion normal o gaussiana II
El teorema central del lımite dice que la suma de variablesaleatorias (con cualquier tipo de distribucion) tiende en mediaa la normal. Puesto que los errores a gran escala provienen dela suma y acumulacion de muchos errores a pequena escala,esto justifica el uso de la normal como modelo para errores.
Una propiedad importante de la normal es que la suma denormales es de nuevo normal, es decir, si X ∼ N(mx , "2
x) eY ∼ N(my , "2
y ) y son independientes, entonces si Z = X + Yse tiene que Z ∼ N(mx + my , "2
x + "2y ).
Por tanto "z =√
"2x + "2
y , es decir, la desviacion tıpica de la
suma de errores es la raız cuadrada de la suma de loscuadrados de las desviaciones tıpicas de los errores.
Esta regla, conocida como Root-Sum-of-Squares (RSS) esmuy importante.
40 / 49

Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Variables aleatorias continuas multidimensionales
Sea una variable aleatoria X ∈ Rn continua multidimensional.Cada componente de X sigue una distribucion unidimensional.Como en el caso unidimensional, se define una funcion dedistribucion conjunta, que se calcula mediante la funcion dedensidad f (x).Igualmente E [g(X )] =
∫Rn g(y)f (y)dy . Los dos casos
importantes son:Media: m(X ) = E [X ] =
∫Rn yf (y)dy .
Matriz de covarianzas:Cov(X ) = E [(X −m(X ))(X −m(X ))T ] = Σ. Es una matrizsimetrica y definida positiva. Los valores de la diagonalrepresentan la varianza de cada componente de X , mientrasque los valores fuera de la diagonal la correlacion entre doscomponentes de X . Se tiene Σ = E [(XXT ]−m(X )m(X )T .
Por ejemplo, para n = 3 y escribiendo X = [X ,Y ,Z ]:
! =
2
64$2
x E [(X ! mx )(Y ! my )] E [(X ! mx )(Z ! mz )]E [(X ! mx )(Y ! my )] $2
y E [(Y ! my )(Z ! mz )]
E [(X ! mx )(Z ! mz )] E [(Y ! my )(Z ! mz )] $2z
3
75
41 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Distribucion normal multivariante I
Se escribe X ∼ Nn(m,Σ) y su funcion de densidad esf (x) = 1
Det(!)(2()n/2 Exp(−1
2(x −m)TΣ"1(x −m)).
Los intervalos de confianza son ahora regiones de Rn,definidos por P(X ∈ Ω) = P".La forma de estas regiones de confianza es de elipsoides,descritos por la ecuacion (x −m)TΣ"1(x −m) = d2, donde ddepende de P". Cuanto mayores sean los valores de losautovalores de Σ, mayor sera el elipsoide. Las direcciones delos ejes del elipsoide vendran dados por los autovectores de Σ.
42 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Distribucion normal multivariante IISi por ejemplo describimos el error en posicion en ejes cuerpo,'rb = ['x 'y 'z ]T , como una normal multivariante con n = 3,de media cero (centrada en el avion) y con matriz decovarianzas:
! =
2
64$2
x 0 00 $2
y 0
0 0 $2z
3
75
Entonces "x representa la magnitud del error ATE(along-track error), "y del error XTE (cross-track error) y "z
del error VE (vertical error) y podemos asimilar el movimientodel avion al movimiento del elipsoide, que representa unaregion de incertidumbre donde se puede encontrar el avion congran probabilidad.Se verifica que si X ∼ Nn(mx ,Σx) e Y ∼ Nn(my ,Σy ) y sonindependientes, entonces si Z = X + Y resultaZ ∼ Nn(mx + my ,Σx + Σy ).Igualmente AX + b donde A y b son no-aleatorios verifica queAX + b ∼ Nn(Amx + b,AΣxAT ).
43 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Procesos estocasticos.
Un proceso estocastico o variable estocastica no es sino unavariable aleatoria X (t) que cambia con el tiempo. Los erroresde navegacion seran este tipo de variables.
Por tanto la media y la covarianza tambien varıan con eltiempo: m(t), Σ(t).
Para un proceso, se define la autocorrelacion comoR(t, *) = E [X (t)X (*)T ]. La autocorrelacion permite conocerhasta que punto la historia pasada de X influye en su valoractual.
Proceso gaussiano: Un proceso gaussiano verificaX (t) ∼ Nn(m(t),Σ(t)), es decir, se distribuye como unanormal multivariante cuya media y covarianza varıan con eltiempo.
44 / 49
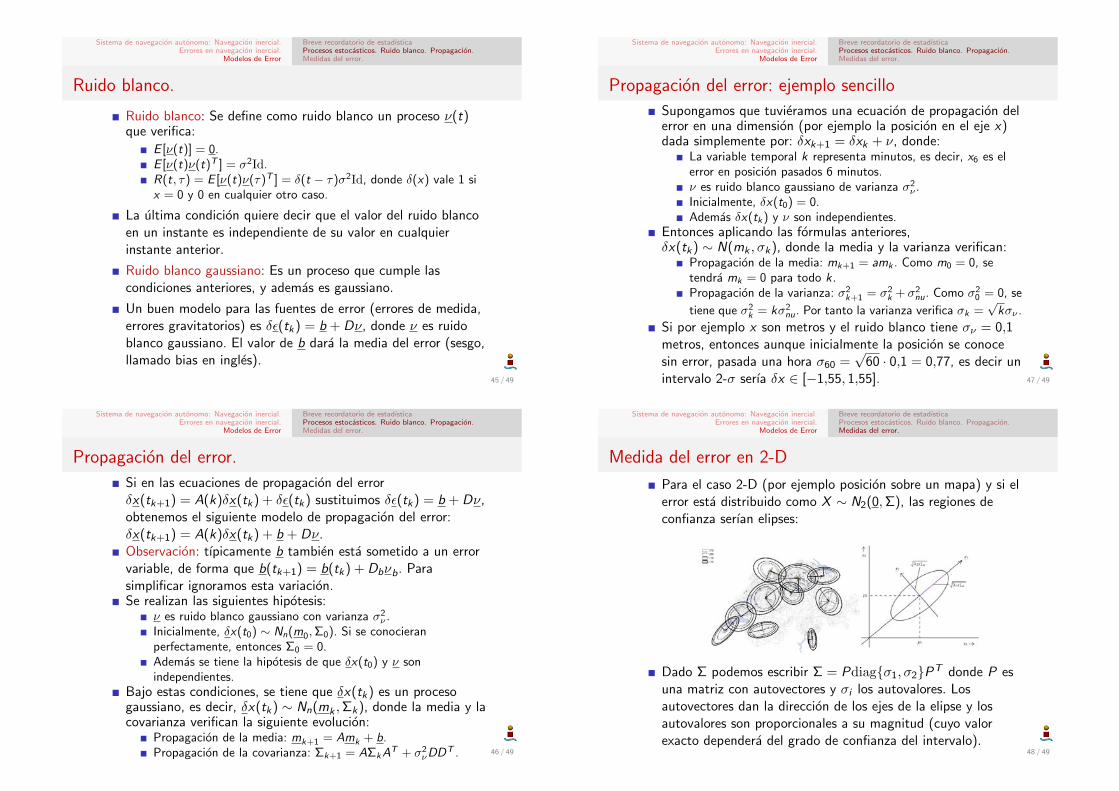
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Ruido blanco.
Ruido blanco: Se define como ruido blanco un proceso +(t)que verifica:
E [+(t)] = 0.E [+(t)+(t)T ] = "2Id.R(t, *) = E [+(t)+(*)T ] = '(t − *)"2Id, donde '(x) vale 1 six = 0 y 0 en cualquier otro caso.
La ultima condicion quiere decir que el valor del ruido blancoen un instante es independiente de su valor en cualquierinstante anterior.
Ruido blanco gaussiano: Es un proceso que cumple lascondiciones anteriores, y ademas es gaussiano.
Un buen modelo para las fuentes de error (errores de medida,errores gravitatorios) es '((tk) = b + D+, donde + es ruidoblanco gaussiano. El valor de b dara la media del error (sesgo,llamado bias en ingles).
45 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Propagacion del error.Si en las ecuaciones de propagacion del error'x(tk+1) = A(k)'x(tk) + '((tk) sustituimos '((tk) = b + D+,obtenemos el siguiente modelo de propagacion del error:'x(tk+1) = A(k)'x(tk) + b + D+.Observacion: tıpicamente b tambien esta sometido a un errorvariable, de forma que b(tk+1) = b(tk) + Db+b. Parasimplificar ignoramos esta variacion.Se realizan las siguientes hipotesis:
+ es ruido blanco gaussiano con varianza "2! .
Inicialmente, 'x(t0) ∼ Nn(m0,Σ0). Si se conocieranperfectamente, entonces Σ0 = 0.Ademas se tiene la hipotesis de que 'x(t0) y + sonindependientes.
Bajo estas condiciones, se tiene que 'x(tk) es un procesogaussiano, es decir, 'x(tk) ∼ Nn(mk ,Σk), donde la media y lacovarianza verifican la siguiente evolucion:
Propagacion de la media: mk+1 = Amk + b.Propagacion de la covarianza: Σk+1 = AΣkAT + "2
!DDT . 46 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Propagacion del error: ejemplo sencilloSupongamos que tuvieramos una ecuacion de propagacion delerror en una dimension (por ejemplo la posicion en el eje x)dada simplemente por: 'xk+1 = 'xk + +, donde:
La variable temporal k representa minutos, es decir, x6 es elerror en posicion pasados 6 minutos.+ es ruido blanco gaussiano de varianza "2
! .Inicialmente, 'x(t0) = 0.Ademas 'x(tk) y + son independientes.
Entonces aplicando las formulas anteriores,'x(tk) ∼ N(mk , "k), donde la media y la varianza verifican:
Propagacion de la media: mk+1 = amk . Como m0 = 0, setendra mk = 0 para todo k.Propagacion de la varianza: "2
k+1 = "2k + "2
nu. Como "20 = 0, se
tiene que "2k = k"2
nu. Por tanto la varianza verifica "k =√
k"! .
Si por ejemplo x son metros y el ruido blanco tiene ") = 0,1metros, entonces aunque inicialmente la posicion se conocesin error, pasada una hora "60 =
√60 · 0,1 = 0,77, es decir un
intervalo 2-" serıa 'x ∈ [−1,55, 1,55]. 47 / 49
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Medida del error en 2-D
Para el caso 2-D (por ejemplo posicion sobre un mapa) y si elerror esta distribuido como X ∼ N2(0,Σ), las regiones deconfianza serıan elipses:
Dado Σ podemos escribir Σ = Pdiag"1, "2PT donde P esuna matriz con autovectores y "i los autovalores. Losautovectores dan la direccion de los ejes de la elipse y losautovalores son proporcionales a su magnitud (cuyo valorexacto dependera del grado de confianza del intervalo).
48 / 49
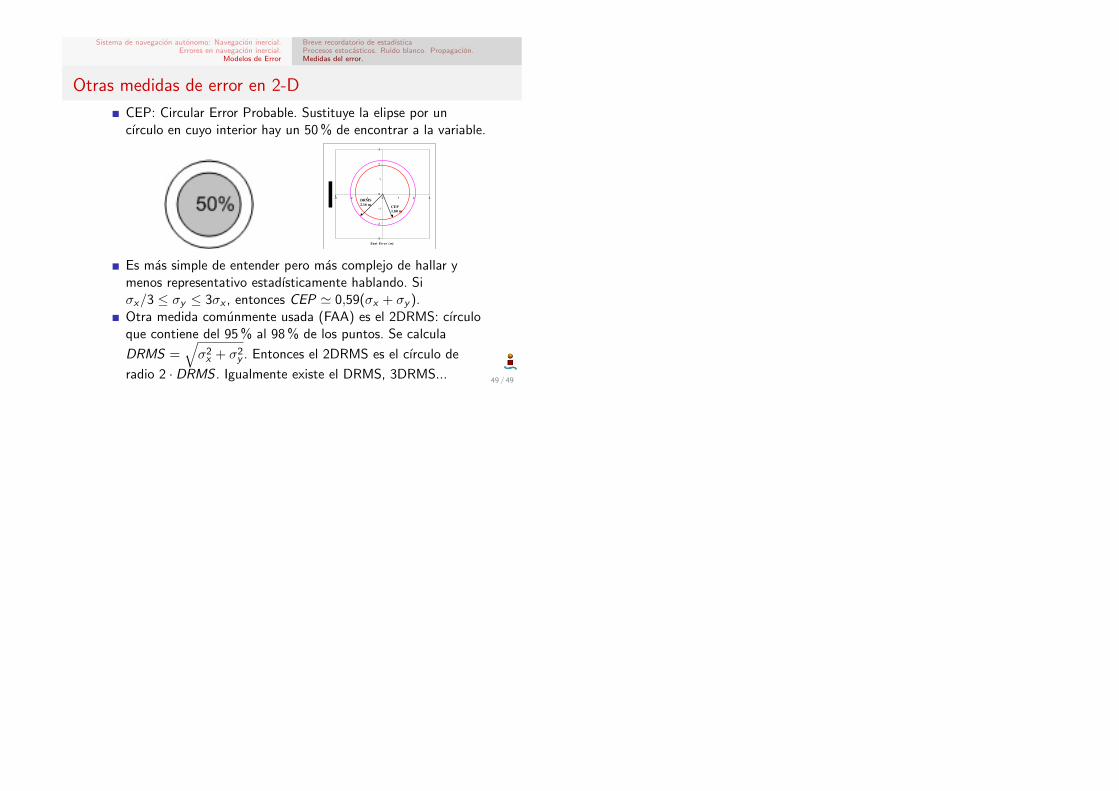
Sistema de navegacion autonomo: Navegacion inercial.Errores en navegacion inercial.
Modelos de Error
Breve recordatorio de estadısticaProcesos estocasticos. Ruido blanco. Propagacion.Medidas del error.
Otras medidas de error en 2-D
CEP: Circular Error Probable. Sustituye la elipse por uncırculo en cuyo interior hay un 50% de encontrar a la variable.
!"#$"%"
!"#$$%&'$(")*'+%&*+","!-"
"
&'()"*+,"-#./0/#)."12("3#44(5"#6(2"0/7(8"0'("-#./0/#)."12(".9100(2(5"#6(2"1)"12(1"5:("0#"
7(1.:2(7()0"(22#2.;"<'/."5/.-(2./#)"#$"-#/)0."/."9133(5"1".9100(2"-3#08"='/9'"*+,"
71):$190:2(2.":.("0#"9'12190(2/>("0'(/2"(?:/-7()0@."199:219A;"<'("12(1"=/0'/)"='/9'"0'("
7(1.:2(7()0."#2"(.0/710(5"-1217(0(2."12("3/B(3A"0#"C("/."9133(5"0'("9#)$/5()9("2(4/#);""
<'("9#)$/5()9("2(4/#)"/."0'()"1)13A>(5"0#"?:1)0/$A"0'("*+,"-(2$#271)9(".010/.0/9133A;"
<'("9#)$/5()9("2(4/#)"=/0'"1"215/:."5(.92/C(."0'("-2#C1C/3/0A"0'10"0'(".#3:0/#)"=/33"C("
=/0'/)"0'(".-(9/$/(5"199:219A;""
"
D/4:2("!".'#=."0'(".9100(2"-3#0"#$"0'("EF"./)43("-#/)0"-#./0/#)."#C.(26(5"CA"0'("190:13"
G#6H0(3"IJKLM*!"2(9(/6(2"$#2"!L"'#:2."1)5"/0."199:219A"215//"#$"NJ+"1)5"OPK,;"
"
"
!"
!#
!$
%
$
#
"
!" !# !$ % $ # "
!"#$ %!&&' & %()*
"D/4:2("!Q"EF",/)43("+#/)0"-#./0/#)."9#33(90(5"#)"0'("2##$0#-"#$"G#6H0(3"C:/35/)4"$#2"!L"
'#:2.":./)4"G#6H0(3"IJKLM*!"2(9(/6(2"1)5"*+,H)0())1"K#5(3"RS!;"""
+,-%./#$"012%3''$%42"0%567"&28%(.345*%%
"
OPK,"/."1"./)43("):7C(2"0'10"(T-2(..(."!O"199:219A;"U)"#25(2"0#"9#7-:0("0'("OPK,"#$"
'#2/>#)013"-#./0/#)"(22#2.8"0'(".01)5125"(22#2."V!W"$2#7"0'("B)#=)"-#./0/#)"/)"0'("
5/2(90/#)."#$"0'("9##25/)10("1T/."12("2(?:/2(5;""
"
OPK,"/."0'(".?:12("2##0"#$"0'("16(214("#$"0'(".?:12("(22#2."='/9'"/."5($/)(5"1."$#33#=.Q"
"
OPK,"X" !!
!"!! " "
!",01)5125"(22#2."V!W"#$"(.0/710(5"9##25/)10(."VT8"AW"#$"(19'"-#/)0"C(/)4"-#./0/#)(5"
91)"C("-2(5/90(5"$2#7"0'("9#22(.-#)5/)4"612/1)9(."#)"0'("5/14#)13"#$"0'("
9#612/1)9("7102/T;""
!"#$
%&'($)
*+,-$
.&%/$)$
Es mas simple de entender pero mas complejo de hallar ymenos representativo estadısticamente hablando. Si"x/3 ≤ "y ≤ 3"x , entonces CEP # 0,59("x + "y ).Otra medida comunmente usada (FAA) es el 2DRMS: cırculoque contiene del 95 % al 98 % de los puntos. Se calcula
DRMS =√
"2x + "2
y . Entonces el 2DRMS es el cırculo de
radio 2 · DRMS . Igualmente existe el DRMS, 3DRMS... 49 / 49

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Navegacion AereaTema 5: Sistema de navegacion por posicionamiento.
Navegacion por satelite.
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Sistema de navegacion por posicionamiento.
La navegacion por posicionamiento consiste en averiguar lalocalizacion geografica con ayuda de senales o medidasexteriores.
El ejemplo mas temprano es la navegacion astronomica que yase vio en la introduccion historica. Dicho tipo de navegacionaun se emplea, especialmente para vehıculos espaciales ymisiles balısticos.
Actualmente la navegacion por posicionamiento se realizamediante radioayudas (por ejemplo VOR/DME, DME/DME),radar y/o sistemas de navegacion por satelite (GNSS).
Ademas de la posicion se puede encontrar la velocidadestudiando el efecto Doppler en las senales. Tambien puedeser posible hallar la actitud.
Veremos en detalle la navegacion DME/DME y GNSS, y suimpacto en la navegacion aerea hoy en dıa.
2 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Fundamentos basicos.
Los sistemas de posicionamiento que vamos a estudiar sebasan en la recepcion (y en el caso del DME, emision) desenales respecto a un punto de referencia cuya localizacion esconocida (una estacion, un satelite).
Estudiando el tiempo de transmision de dichas senales, seencuentra la distancia hasta el punto de referencia.
Con dicha distancia se puede construir un lugar geometrico depuntos posibles donde puede hallarse la aeronave.
Dado el suficiente numero de estaciones o satelites, sepodra hallar la posicion de la aeronave como la interseccion dedichos lugares geometricos.
La posicion relativa de los puntos de referencia influira en elerror (DOP: Dilution of Precision).
3 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
DME IDME=Distance Measurement Equipment.
El sistema requiere un emisor/receptor en laaeronave y un transponder en la estacion entierra.
El sistema en la aeronave interroga altransponder en tierra mediante una serie depares de pulsos. La estacion responde con unasecuencia identica de pulsos con un ciertoretraso especıfico (50 microsegundos).
La distancia se calcula simplemente midiendo eltiempo que tardan las senales en retornar trassu emision; a dicho tiempo se le resta 50microsegundos y se divide por 2. Dividiendo elresultado por la velocidad de la luz, se obtieneuna buena estimacion de la distancia a laestacion en tierra. 4 / 48
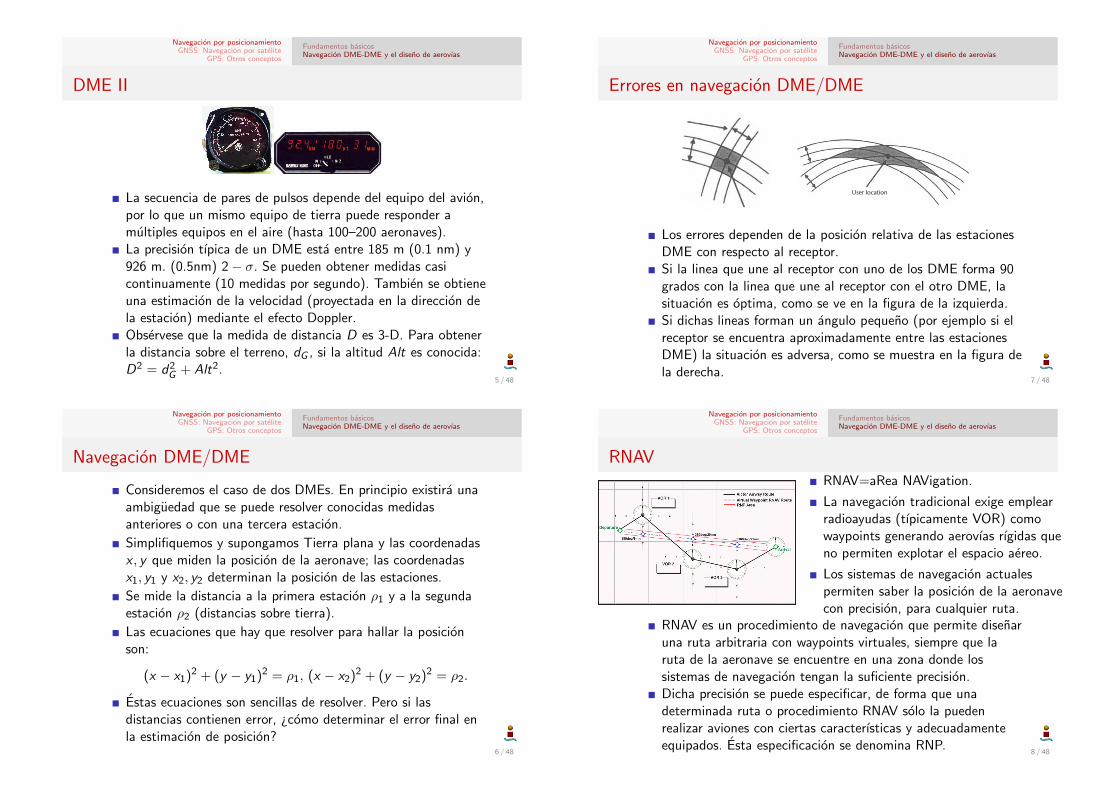
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
DME II
La secuencia de pares de pulsos depende del equipo del avion,por lo que un mismo equipo de tierra puede responder amultiples equipos en el aire (hasta 100–200 aeronaves).La precision tıpica de un DME esta entre 185 m (0.1 nm) y926 m. (0.5nm) 2! !. Se pueden obtener medidas casicontinuamente (10 medidas por segundo). Tambien se obtieneuna estimacion de la velocidad (proyectada en la direccion dela estacion) mediante el efecto Doppler.Observese que la medida de distancia D es 3-D. Para obtenerla distancia sobre el terreno, dG , si la altitud Alt es conocida:D2 = d2
G + Alt2.5 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Navegacion DME/DME
Consideremos el caso de dos DMEs. En principio existira unaambiguedad que se puede resolver conocidas medidasanteriores o con una tercera estacion.
Simplifiquemos y supongamos Tierra plana y las coordenadasx , y que miden la posicion de la aeronave; las coordenadasx1, y1 y x2, y2 determinan la posicion de las estaciones.
Se mide la distancia a la primera estacion "1 y a la segundaestacion "2 (distancias sobre tierra).
Las ecuaciones que hay que resolver para hallar la posicionson:
(x ! x1)2 + (y ! y1)
2 = "1, (x ! x2)2 + (y ! y2)
2 = "2.
Estas ecuaciones son sencillas de resolver. Pero si lasdistancias contienen error, ¿como determinar el error final enla estimacion de posicion?
6 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Errores en navegacion DME/DME
In the presence of measurement errors, the range rings used to compute theuser’s location will be in error and result in error in the computed position. The con-cept of dilution of precision is the idea that the position error that results from mea-surement errors depends on the user/foghorn relative geometry. Graphically, theseideas are illustrated in Figure 7.5. Two geometries are indicated. In Figure 7.5(a),
7.3 PVT Estimation Concepts 323
(a)
(b)
Foghorn 2
Variation in range ringdue to range errors:from foghorn 1from foghorn 2
Shaded region: Locationsusing data from withinindicated error bounds
User location
Foghorn 1
Shaded region: Locations using datafrom within indicated error bounds
Variation in range ring due torange errors:from foghorn 1from foghorn 2
Foghorn 1Foghorn 2
User location
Figure 7.5 Relative geometry and dilution of precision: (a) geometry with low DOP, and (b)geometry with high DOP.
In the presence of measurement errors, the range rings used to compute theuser’s location will be in error and result in error in the computed position. The con-cept of dilution of precision is the idea that the position error that results from mea-surement errors depends on the user/foghorn relative geometry. Graphically, theseideas are illustrated in Figure 7.5. Two geometries are indicated. In Figure 7.5(a),
7.3 PVT Estimation Concepts 323
(a)
(b)
Foghorn 2
Variation in range ringdue to range errors:from foghorn 1from foghorn 2
Shaded region: Locationsusing data from withinindicated error bounds
User location
Foghorn 1
Shaded region: Locations using datafrom within indicated error bounds
Variation in range ring due torange errors:from foghorn 1from foghorn 2
Foghorn 1Foghorn 2
User location
Figure 7.5 Relative geometry and dilution of precision: (a) geometry with low DOP, and (b)geometry with high DOP.
Los errores dependen de la posicion relativa de las estacionesDME con respecto al receptor.Si la linea que une al receptor con uno de los DME forma 90grados con la linea que une al receptor con el otro DME, lasituacion es optima, como se ve en la figura de la izquierda.Si dichas lineas forman un angulo pequeno (por ejemplo si elreceptor se encuentra aproximadamente entre las estacionesDME) la situacion es adversa, como se muestra en la figura dela derecha.
7 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
RNAVRNAV=aRea NAVigation.
La navegacion tradicional exige emplearradioayudas (tıpicamente VOR) comowaypoints generando aerovıas rıgidas queno permiten explotar el espacio aereo.
Los sistemas de navegacion actualespermiten saber la posicion de la aeronavecon precision, para cualquier ruta.
RNAV es un procedimiento de navegacion que permite disenaruna ruta arbitraria con waypoints virtuales, siempre que laruta de la aeronave se encuentre en una zona donde lossistemas de navegacion tengan la suficiente precision.Dicha precision se puede especificar, de forma que unadeterminada ruta o procedimiento RNAV solo la puedenrealizar aviones con ciertas caracterısticas y adecuadamenteequipados. Esta especificacion se denomina RNP.
8 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
RNAV/RNP
RNP=Required Navigation Performance.
Es un conjunto de estandares que especificanlos requisitos mınimos que una aeronave y susistema de navegacion deben cumplir paraoperar en un determinado espacio aereo.
RNAV/RNP: permite disenar rutas con menorseparacion que la tradicionalmente empleada, ypor tanto una explotacion eficiente del espacioaereo.
RNAV/RNP es el futuro del trafico aereo y requiere un amplioconocimiento de los sistemas de navegacion utilizados.
Ejemplificamos estos conceptos para el caso DME-DME.
9 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Navegacion RNAV DME/DME
Los sistemas DME/DME estan extendidos hoyen dıa y permiten suficiente cobertura paratodas las operaciones en ruta en Europa.Permiten cumplir los requisitos RNAV si bien sereconoce que deberıa aumentar el numero deestaciones para mejorar la precision.
Para poder realizar navegacion DME/DME losrequisitos mınimos son 2 estaciones cumpliendo:
Distancia menor de 200 nm y mayor de 1nm.Arco subtendido entre las dos estacionessituado entre 30 grados y 150 grados.
Cuantas mas estaciones esten disponibles,mayor precision se podra conseguir. Encualquier caso la precision dependera delequipo.
10 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento IRNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 10
Estimated
Flight Path
SYSTEM ACCURACY
Nominal Flight
Path
HORIZONTAL VIEW
Estimated Position
FTT
True Aircraft Flight Path
True Aircraft Position
ATT
XTT
XTT depends on FTT
Nominal Aircraft
Position
RNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 11
WAYPOINT TOLERANCE
ATT
XTT
Errores 2-D: ATT (along-track tolerance) y XTT (cross-tracktolerance).
Estos son los errores que se requieren para disenarprocedimientos RNAV. Se fija un corredor de seguridad entorno a la trayectoria que respete estos errores maximos.
Aparte de los errores procedentes del DME, otros errores quejuegan un papel son (FTT=error tecnico de vuelo) y el errorde calculo (ST=system tolerance).
11 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento II
Aunque el error depende de la posicion relativa de los DMEs yel receptor, la norma editada por EUROCONTROL considerael peor caso posible y evita complicar las formulas con lageometrıa del problema.
Segun la norma, hay que calcular:d = 1,23"
#Alt " 0,0125 + 0,25nm, con Alt en pies.
Se toma ST = 0,25nm, y el valor de FTT sera:En ruta: FTT = 2nmAcercamiento inicial e intermedio: FTT = 1nm.Despegue, acercamiento final FTT = 0,5nm.
Si solo hay 2 DMEs multiplicar d por 1,29.
Los errores seran:
XTT =!
d2 + FTT 2 + ST 2, ATT =!
d2 + ST 2
12 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento III
Aparte se anaden pequenos ”bu!ers”para aumentar laseguridad de los procedimientos.
Usando los valores de XTT y ATT se pueden disenarprocedimientos RNAV.
RNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 19
IAWP IWP
DESIGN OF PROTECTION
AREAS
PRIMARY AREA
SECONDARY AREA
Guidance Material for the Design of Terminal Procedures for DME/DME and GNSS Area Navigation
Edition : 2.2 Released Issue Page 8
2.3.4 The procedure designer should choose the table based upon the worst casenavaid availability for the waypoint in question. In other words, how many DMEstations are within range and available for use at the lowest usable level at thewaypoint. The XTT, ATT and !AW values at that level, for the appropriatephase of flight, should then be used for all containment area calculationsassociated with that waypoint. The en-route values are provided for use onarrival legs that are more than 25 NM from the IAWP.
Altitude En-route IAWP/IWP FAWP/MAWP/DWP
(ft)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
15,000 For all altitudes 2.94 2.76 5.41
14,000 4.08 3.56 8.10 2.86 2.68 5.29
13,000 2.78 2.60 5.17
12,000 2.70 2.51 5.05
11,000 2.61 2.42 4.92
10,000 2.53 2.32 4.79 2.37 2.32 4.06
9,000 2.43 2.22 4.65 2.27 2.22 3.91
8,000 2.34 2.11 4.50 2.17 2.11 3.75
7,000 2.23 2.00 4.35 2.06 2.00 3.59
6,000 2.13 1.88 4.19 1.94 1.88 3.41
5,000 2.01 1.74 4.01 1.81 1.74 3.22
4,000 1.88 1.60 3.83 1.67 1.60 3.01
3,000 1.75 1.43 3.62 1.52 1.43 2.77
2,000 1.59 1.24 3.38 1.33 1.24 2.50
1,000 1.40 0.98 3.10 1.10 0.98 2.15
500 0.95 0.81 1.92
Table 2 - XTT, ATT and Semi-width Values (in NM) for DME/DME RNAV (Only 2 DMEs available)
Altitude En-route IAWP/IWP FAWP/MAWP/DWP
(ft)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
15,000 For all altitudes 2.37 2.15 4.55
14,000 3.40 2.67 7.10 2.31 2.08 4.47
13,000 2.25 2.02 4.38
12,000 2.19 1.95 4.29
11,000 2.13 1.88 4.19
10,000 2.06 1.80 4.10 1.87 1.80 3.31
9,000 2.00 1.73 3.99 1.80 1.73 3.20
8,000 1.92 1.64 3.89 1.72 1.64 3.08
7,000 1.85 1.56 3.78 1.63 1.56 2.95
6,000 1.77 1.46 3.66 1.55 1.46 2.82
5,000 1.69 1.36 3.53 1.45 1.36 2.67
4,000 1.60 1.25 3.40 1.34 1.25 2.52
3,000 1.50 1.12 3.25 1.23 1.12 2.34
2,000 1.39 0.97 3.09 1.09 0.97 2.14
1,000 1.27 0.78 2.90 0.92 0.78 1.89
500 0.82 0.64 1.72
Table 3 - XTT, ATT and Semi-width Values (in NM) for DME/DME RNAV (More than 2 DMEs available)
Los calculos anteriores se pueden encontrar tabulados.
13 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Sistemas de posicionamiento satelitales: TRANSITEn 1957, cuando se lanzo el Sputnik, se observo queempleando el efecto Doppler a sus senales de radio sepodıa estimar su velocidad relativa al observador.
A partir de la velocidad relativa se podıa encontrar laposicion relativa, y suponiendo que el observadorconociera su posicion perfectamente, por tanto seencontraba la posicion del Sputnik.
Se plantea la idea de invertir este calculo: conocida laposicion del satelite, y utilizando senales de radio,determinar la posicion del observador.
Un primer sistema satelital es el sistema TRANSIT:5 satelites en orbita polar baja y 5 repuestos.Empleaba el efecto Doppler para obtener medidas 2-Dde la posicion, con precision de 200–400 m.En servicio desde 1965 hasta 1991.Actualizacion de posicion cada 30 minutos(# = 80o)–110 minutos (# = 00). 14 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Sistemas de posicionamiento satelitales: GPS
En los anos 60 agencias de EE.UU. (NASA,DoD...) se interesan por desarrollar un sistema:
Global.3-D.De gran precision.Con operacion continua.Util en plataformas de dinamica rapida.
En los anos 70 nace el sistema GPS (Global PositioningSystem) que satisface los criterios demandados y es pasivo:permite infinitos usuarios.El sistema en su concepcion es de naturaleza militar.
1978: Se lanza el primer satelite.Anos 80: el sistema es operacional.Anos 90: modernizacion del sistema. El uso civil superaampliamente al militar.2000: Se desconecta la S.A. (Selective Availability).
Otros sistemas: Glonass (Rusia), Beidou y Compass(China),Galileo (UE, 2010?). 15 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento espacial
Constelacion de 24 satelites (nominal)distribuidos en 6 planos orbitales, con 4satelites por plano. Orbitas circulares.
La constelacion se ubica en orbita media,con una altitud aproximada de 20200kilometros sobre la Tierra.
Satelites NAVSTAR, fabricados por RockwellInternational. Pesan 860 kg.
Cada satelite lleva a bordo un reloj atomicosincronizado con el tiempo GPS.
Cada satelite emite continuamente un mensaje en dosfrecuencias: L1(1575.42 Mhz), L2(1227.6MHz).El mensaje tiene 2 partes: C/A code (coarse/adquisition) y Pcode (precision). Contienen una secuencia que permite estimarel tiempo de recepcion e informacion sobre la localizacion delsatelite (efemerides). 16 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento de control
Segmento de control: red que monitoriza elestado de los satelites.
Actualiza con observaciones la posicion realde los satelites (efemerides).
Sincroniza los relojes atomicos.
Controlado por el ejercito. La estacion decontrol maestra esta en Colorado (SchrieverAFB).
17 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento de usuario
Dispositivo que emplea un usuario de GPS para obtener suposicion a partir de las senales recibidas. Para elloimplementa un algoritmo de estimacion de posicion.
Requiere: receptor de radio, reloj de cuarzo.
Contiene un propagador de orbitas: calcula la posicion de lossatelites a partir de las efemerides.
El GPS fue concebido con uso dual, civil o militar.La senal militar esta encriptada, y permite mayor precision(PPS=Precise Positioning System). La senal civil tenıa ruidoanadido para hacerla menos precisa (SPS=StandardPositioning System). Esta adicion de ruido se denominabaS.A.=Selective Availability, pero se desactivo en 2000,incrementando la precision SPS.Las precisiones mınimas SPS son del orden de 13m. 2drmshorizontal, 22m 2-! vertical, 0.2m/s 2-! en velocidad y 40ns2-! en tiempo. 18 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Observables. Pseudodistancia.
Las medidas del receptor GPS se denominan observables.A partir de las senales enviadas por un satelite, es posibledeterminar el tiempo t0 en el que se enviaron. Comparandocon el tiempo t1 de recepcion, el primer observable que seobtiene es la diferencia de tiempos "t = t1 ! t0.Llamando r a la distancia receptor-satelite, r = $r$ = c"t,donde c es la velocidad de la luz. Definamos " = c"t.Si el reloj del receptor (un reloj de cuarzo) estuvierasincronizado perfectamente con el tiempo GPS (dado por losrelojes atomicos a bordo de los satelites), entonces " serıa unamedida exacta de la distancia.Pero un reloj de cuarzo tiene errores; treceptor = tGPS + tu,donde tu es el sesgo del reloj. Errores muy pequenoscorresponden con grandes distancias ya que c es muy elevado.Ya que " no es una medida exacta de la distancia se denominapseudodistancia.
19 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion.
Llamemos s a la posicion del satelite y u a la posicion delusuario. En aplicaciones GPS se suele trabajar en el sistema dereferencia ECI o a veces ECEF.
Se tiene entonces que r = s ! u. Luego r = "! ctu = $s ! u$.En el mensaje de navegacion esta codificada la efemerides delsatelite con gran precision, lo que permite calcular s con granexactitud.
Por tanto para cada satelite i que sea visible en un instantedado tendremos una ecuacion del tipo "i ! ctu = $s i ! u$(una esfera).¿Cuantos satelites seran necesarios para hallar u?
La interseccion de dos esferas es una circunferencia.La interseccion de tres esferas son dos puntos.
Ademas tu es desconocido: son necesarios al menos cuatrosatelites.
20 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites I
Por tanto tenemos las siguientes ecuaciones:
ρ1 − ctu = ‖s1 − u‖ρ2 − ctu = ‖s2 − u‖ρ3 − ctu = ‖s3 − u‖ρ4 − ctu = ‖s4 − u‖
Es necesario un algoritmo para determinar tu y u.
Si definimos u = [xu yu zu]T y s i = [xi yi zi ]T , observese que"i =
!(xi ! xu)2 + (yi ! yu)2 + (zi ! zu)2 + ctu. Por tanto
"i = fi (xu, yu, zu, tu).
Supongamos que conozco una estimacion inicial de u y tu,dada por u = [xu yu zu]T y tu. Definamos$u = u ! u = [$xu $yu $zu]T , $tu = tu ! tu y"i = $s i ! u$+ ctu.
Linealicemos ahora fi en torno a la estimacion inicial.
21 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites IISe tendra que:ρi = fi (xu , yu , zu , tu) = fi (δxu + xu , δyu + yu , δzu + zu , δtu + tu)
= fi (xu , yu , zu , tu) +∂fi (xu , yu , zu , tu)
∂xuδxu +
∂fi (xu , yu , zu , tu)
∂yuδyu +
∂fi (xu , yu , zu , tu)
∂zuδzu
+∂fi (xu , yu , zu , tu)
∂ tuδtu
Se tiene que:
%fi%xu
= ! (xi ! xu)!(xi ! xu)2 + (yi ! yu)2 + (zi ! zu)2
Puesto que todo es conocido en la expresion de arriba,definimos axi = ! !fi
!xu= (xi!xu)#
(xi!xu)2+(yi!yu)2+(zi!zu)2.
Similarmente se define ayi = ! !fi!yu
y azi = ! !fi!zu
.
Finalmente se tiene que !fi! tu
= c .Por tanto la linealizacion queda:"i = "i ! axi $xu ! ayi $yu ! azi $zu + c$tu
22 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites III
Definamos "" = "i ! "i = axi $xu + ayi $yu + azi $zu ! c$tu.Si definimos:
!x =
2
664
δxuδyuδzu−cδtu
3
775 , !ρ =
2
664
ρ1 − ρ1ρ2 − ρ2ρ3 − ρ3ρ4 − ρ4
3
775 , H =
2
664
ax1 ay1 az1 1ax2 ay2 az2 1ax3 ay3 az3 1ax4 ay4 az4 1
3
775
Se tiene que "" = H"x .
Por tanto para determinar "x simplemente "x = H!1"" yse obtienen los errores respecto a la estimacion inicial.Algoritmo iterativo: dada una estimacion inicial u0, t0
u y lasmedidas "i :
1 Formar "0i , ""0 y H0.
2 Encontrar "x0 = (H0)−1""0.
3 Mejorar la estimacion inicial usando "x0, obteniendo u1, t1u .
4 Formar "1i , ""1 y H1.
5 Encontrar "x1 = (H1)−1""1.6 Iterar hasta que $"xn$ & ', una tolerancia predefinida.
23 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de mınimos cuadrados I
El algoritmo anterior no es valido si se tienen mas de cuatrosatelites, porque H no serıa cuadrada. En general para nsatelites $" es n " 1 y H es n " 4, mientras que $x es 4" 1.Si las medidas contienen error, se podrıa usar un modelo deltipo "" = H"x + &, donde & % Nn(0,#) es un modelo delerror.En ambos casos se resuelve el problema usando el algoritmode mınimos cuadrados, que resuelve un problema del tipo:y = Az + b, donde:
y es de dimension n y conocido (medidas).z es de dimension m & n y es desconocido (datos a calcular).A es conocido (medidas).b son los errores (desconocidos): b % Nm(0,#)
Se busca una solucion z de forma que Az sea lo mas parecidoposible a y en el sentido de los mınimos cuadrados.Matematicamente, se busca z tal que la funcion de costeJ = (y ! Az)T (y ! Az) sea mınimo.
24 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de mınimos cuadrados II
Se busca !J!z = 0.
En primer lugar: J = yT y ! 2yTAz + zTATAz
Tomando la derivada: !J!z = !2yTA + 2zTATA
Igualandola a 0:yTA = zTATA
Despejando z : zT = yTA(ATA)!1 ' z = (ATA)!1AT y .
Observese que (ATA)!1AT es la pseudoinversa y existesiempre que A tenga al menos m filas (medidas)independientes.
Propiedades estadısticas de la solucion:E [z] = E [(AT A)−1AT y ] = (AT A)−1AT E [y ] = (AT A)−1AT E [Az + b] =
(AT A)−1AT AE [z] = E [z] = z.
Cov [z] = Cov [(AT A)−1AT y ] = (AT A)−1AT Cov [y ]A(AT A)−1 = (AT A)−1AT Cov [Az +
b]A(AT A)−1 = (AT A)−1AT“ACov [z]AT + "
”A(AT A)−1 = (AT A)−1AT "A(AT A)−1
25 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de mınimos cuadrados ponderados
¿Existe alguna mejora posible del algoritmo de mınimoscuadrados que disminuya la covarianza de la estimacion?Se plantea ponderar las medidas en la funcion de coste conuna matriz de pesos W , de forma que se de mas peso a lasmedidas mas precisas y menos a las menos precisas. Portanto: J = (y ! Az)TW (y ! Az) donde W ha de ser unamatriz simetrica definida positiva.Procediendo como antes (se deja como ejercicio) se llega az = (ATWA)!1ATWy .Propiedades estadısticas de la solucion:
E [z] = z.
Cov [z] = (AT WA)−1AT W"WA(AT WA)−1
Para minimizar la covarianza, tomar W = #!1; es simetrica ydefinida positiva. Llegamos a z = (AT#!1A)!1AT#!1y .La covarianza sera:Cov [z ] = (AT#!1A)!1AT#!1##!1A(AT#!1A)!1 =(AT#!1A)!1AT#!1A(AT#!1A)!1 = (AT#!1A)!1.
26 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Errores en los observables
Podemos aplicar el algoritmo de los mınimos cuadradosponderados a nuestro caso de n medidas de pseudodistancia,con "" = H"x + &, donde & % Nn(0,#) modela los erroresen la pseudodistancia.
Es razonable suponer # =
"
###$
!21
!22
. . .!2
n
%
&&&', donde !i es
la varianza del error de cada pseudodistancia.En primera aproximacion se toma !2
i = !2UERE , donde
UERE=User Equivalent Range Error, una estimacion cuyovalor tıpico es !UERE % 7! 1,5m (PPS-SPS), y proviene delas siguientes fuentes de error (sumadas con RSS):
Segmento espacial: error reloj (1.1 m), calculo orbita (0.8 m).Segmento usuario: Efectos atmosfericos, ruido del receptor yresolucion, efectos multicamino: 7-1.4 m. (PPS-SPS)
27 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP I
Por tanto en primera aproximacion # = !2UERE Idn y no es
necesario usar mınimos cuadrados ponderados. La covarianzadel resultado sera: Cov ["x ] =(HTH)!1HT!2
UERE IdnH(HTH)!1 = !2UERE (HTH)!1.
Definimos G = (HTH)!1, llegamos a Cov ["x ] = !2UEREG .
El significado fısico de Cov ["x ] viene dado por
Cov [!x] =
2
664
Var [δx2u ] Cov [δxuδyu ] Cov [δxuδzu ] Cov [δxuδtu ]
Cov [δxuδyu ] Var [δyu ] Cov [δyuδzu ] Cov [δyuδtu ]Cov [δxuδzu ] Cov [δzuδyu ] Var [δz2
u ] Cov [δzuδtu ]Cov [δxuδtu ] Cov [δtuδyu ] Cov [δtuδzu ] Var [δt2u ]
3
775 = σ2UERE
2
664
G11G22
G33G44
3
775
Los valores interesantes son los de la diagonal: nos dicen lavarianza en las diferences direcciones y el tiempo.Estas varianzas son el producto de dos factores: !2
UERE , quedepende de la senal, y G , que depende solo de H, que a su vezsolo depende de las derivadas de fi : es decir de la geometrıa.!"
#$ERROR GPS=(FACTOR GEOMETRICO)" (ERROR SENAL)
28 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP II
Estos valores en la diagonal de G se combinan para formar losllamados factores DOP, que nos dicen cuanto afecta lageometrıa a la solucion del error. Los valores tıpicamenteusados son:
GDOP-Geometric Dilution of Precision.GDOP =
#G11 + G22 + G33 + G44.
PDOP-Position Dilution of Precision.PDOP =
#G11 + G22 + G33.
TDOP-Time Dilution of Precision. TDOP =#
G44.HDOP-Horizontal Dilution of Precision. GDOP =
#G11 + G22.
VDOP-Vertical Dilution of Precision. VDOP =#
G33.
Usando los factores DOP podemos hallar rapidamente unaestimacion de la precision de nuestro GPS:
!z = VDOP " !UERE
!t = TDOP " !UERE
Precision horizontal 2! DRMS = 2HDOP " !UERE
29 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP III
¿Como influye la geometrıa en G?
Intuitivamente, parece bastante claroque si las medidas se obtienen desatelites muy proximos, los resultadosno seran buenos.
Estudiamos para el caso de 4 satelitesla configuracion que minimiza elGDOP, con los satelites visibles en elhorizonte (elevacion mınima 5 grados).
La elevacion/azimut optimo de los satelites es:
Satelite 1 2 3 4h 5o 5o 5o 90o
Az 0o 120o 240o 0o
Nota: Al azimut de 1-3 se le puede anadir cualquier valorconstante, siempre que se anada a todos. 30 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP IV
Dicha configuracion optima es un tetraedro, con el usuariosituado aproximadamente en el centro de una de las caras, yel vertice opuesto a dicha cara justo sobre el usuario.Para esta configuracion se tiene:
H =
2
664
0 0,996 0,087 10,863 −0,498 0,087 1−0,863 −0,498 0,087 1
0 0 1 1
3
775 → G = (HT H)−1 =
2
664
0,672 0 0 00 0,672 0 00 0 1,6 −0,5050 0 −0,505 0,409
3
775
Los factores DOP son: GDOP = 1,83, PDOP = 1,72,TDOP = 0,64, HDOP = 1,16, VDOP = 1,26.
Tomando !UERE = 7m (SPS):Error vertical: 17.64 metros 2-!.Precision horizontal 16.24 metros 2-DRMS.Precision en tiempo 2-!:2" TDOP " !UERE/c = 30 ns
31 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la velocidad
Una sistema de navegacion enfocado a navegacion aerea nosolo debe ser capaz de hallar la posicion, sino tambien lavelocidad (y la actitud).
Un sistema GPS se puede actualizar aproximadamente desde 1(receptores basicos baratos) hasta unas 20 veces por segundo(receptores con gran capacidad de calculo, muy caros). Comoprimera idea para calcular v podrıamos usar simplemente laposicion en dos medidas consecutivas: v = u(t+!t)!u(t)
!t .
No obstante si v es elevado (lo que siempre sucede enaeronaves), incluso para un alto ancho de banda, la anteriorformula es poco precisa e introduce errores.
Los receptores GPS modernos encuentran la velocidadmediante otro observable: la frecuencia de la portadora. Estafrecuencia se modifica por el efecto Doppler, debido a queentre el usuario y el satelite existe una velocidad relativa.
32 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Efecto Doppler
Ecuacion del efecto Doppler: fR = fT(1! v r · a
c
), donde:
fR es la frecuencia recibida.fT es la frecuencia transmitida (conocida).v r = s ! u es la velocidad relativa satelite-usuario.a = s−u
‖s−u‖ es el vector unitario en la direccion satelite-usuario.Si ya hemos obtenido la posicion siguiendo los metodosanteriormente descritos se puede considerar a conocido.
Por tanto la diferencia de fase "f vendra dada por:
"f = fT ! fR = !fTv r · a
c.
Por otro lado el observable no es directamente "f , porque elreloj del segmento de usuario no tiene la suficiente precision eintroduce errores de medida de frecuencia de la siguienteforma: fM = fR ! fM tu, donde fM es la frecuencia medida.
33 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Deriva del reloj de usuario
Para entender la ecuacion fM = fR ! fM tu, imaginemos que elusuario mide una senal dada por y = sin(a · (), donde ( es eltiempo del receptor.El receptor del usuario deduce que tiene una senal de aHercios. Por tanto fM = a.Pero si ( (= t, donde t es el tiempo GPS, se introduce unerror. Este error es ( = t + tu, donde tu es la deriva del relojdel usuario. Imaginemos que tu ) c1 + c2t. Luego tu = c2.Entonces realmente y = sin(at + ac1 + ac2t), lo que es unasenal de a + ac2 Hercios (ac1 es un desfase y no influye en lafrecuencia de la senal). Luego fR es igual a a + ac2.En efecto, se verifica: a = a + ac2 ! ac2.Aunque tu puede ser muy pequeno, tiene un efecto muysignificativo en el resultado real, ya que estara multiplicadopor c . Por tanto una deriva de 1 microsegundo por segundo(10!6) darıa errores del orden de 300 m/s! 34 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de calculo de velocidad I
Por tanto tenemos las dos ecuaciones: fT ! fR = !fTv r · a
cy
fM = fR ! fM tu.Eliminando fR , se llega a:
cfT ! fM
fT= !v r · a! c
fMfT
tu
Puesto que v r = s ! u, escribimos:
cfT ! fM
fT+ s · a = u · a! c
fMfT
tu
Llamemos d = c fT!fMfT
+ s · a; es un vector conocido enfuncion de los datos, la medida de fase de la portadora, elcalculo orbital, y la estimacion anterior de la posicion.Para cada satelite (un mınimo como ya vimos de 4) setendra una ecuacion: d i = u · ai ! c fM i
fT itu
35 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de calculo de velocidad II
Observese que las componentes de ai a partir de una posicionanteriormente estimada u son:axi = (xi!xu)#
(xi!xu)2+(yi!yu)2+(zi!zu)2,
ayi = (yi!yu)#(xi!xu)2+(yi!yu)2+(zi!zu)2
,
azi = (zi!zu)#(xi!xu)2+(yi!yu)2+(zi!zu)2
.
Estos valores ya se habıan calculado anteriormente en laestimacion de posicion! Luego son conocidos. Llegamos a:d i = axi ux + ayi uy + azi uz ! c fM i
fT itu
Aproximamos fM ifT i) 1. Por tanto llegamos a la ecuacion
d = Hg , donde H es la matriz que se uso para estimar laposicion, d es un vector con las medidas y datos, yg = [ux uy uz ! ctu]T que hay que calcular.
Resolvemos el problema por mınimos cuadrados como antes.36 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad, integridad y continuidad.
En la tabla se resumen la mayorparte de los sistemas denavegacion en uso.
Como se puede ver, el GPS es elque consigue mayor precision.
No obstante, la precision no esel unico parametro por el que sedebe elegir un sistema denavegacion.
Otros conceptos de granimportancia son integridad,continuidad y disponibilidad.
37 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad I
Se define disponibilidad (availability) de un sistema denavegacion como el porcentaje del tiempo que dicho sistemaes “utilizable”, dentro de su area especificada de cobertura.Utilizable se refiere a que el sistema cumple unos requisitosmınimos (p.ej. en precision) previamente especificados. Unadefinicion tıpica de utilizable es que el usuario obtenga unPDOP & 6.En el caso del GPS, el area de cobertura es toda la superficiede la Tierra, pero tambien hay que considerar el llamado“angulo de mascara”: el angulo de elevacion en el horizonte apartir del cual los satelites se consideran visibles para elreceptor GPS.En un entorno urbano o con accidentes geograficos dichoangulo tendra que considerarse mayor que en un entorno sinaccidentes (p.ej. el mar).
38 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad II
The threshold for the maximum acceptable DOP value is dependent on thedesired accuracy level. The availability of GPS, therefore, will depend on the strin-gency of the accuracy requirement. For this analysis, availability of GPS is chosen tobe defined as PDOP ! 6, which is commonly used as a service availability thresholdin the GPS performance standards [17].
336 Performance of Stand-Alone GPS
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angleAv
aila
bilit
y(%
)
PDOP
Figure 7.9 Cumulative distribution of PDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angle
Avai
labi
lity
(%)
HDOP
Figure 7.8 Cumulative distribution of HDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
The threshold for the maximum acceptable DOP value is dependent on thedesired accuracy level. The availability of GPS, therefore, will depend on the strin-gency of the accuracy requirement. For this analysis, availability of GPS is chosen tobe defined as PDOP ! 6, which is commonly used as a service availability thresholdin the GPS performance standards [17].
336 Performance of Stand-Alone GPS
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angleAv
aila
bilit
y(%
)
PDOP
Figure 7.9 Cumulative distribution of PDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angle
Avai
labi
lity
(%)
HDOP
Figure 7.8 Cumulative distribution of HDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
Los datos mostrados son para la constelacion nominal y paradistintos angulos de mascara.Los datos son a nivel global y en intervalos de 5 minutos.Para angulos de mascara de 0, 2.5 y 5 grados la disponibilidades del 100%. Para 7.5 grados se encuentra una disponibilidaddel 99.98 %. La duracion maxima de los periodos de nodisponibilidad con dicho angulo de mascara es de 10 minutos,y suceden para latitudes extremas (mayores de ±60o). 39 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad III
rences of these during the day. The majority of the outages are 10 minutes or less.This constellation provides an availability of 99.903%.
7.4 GPS Availability 339
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
24 Satellites23 Satellites22 Satellites21 Satellites
Avai
labi
lity
(%)
PDOP
Figure 7.12 Cumulative distribution of PDOP with 5º mask angle cases of 24, 23, 22, and 21satellites.
!150 !120 !90 !60 !30 0 30 60 90 120 150
1- to 5-minute outages6- to 10-minute outages
!150 !120 !90 !60 !30 0 30 60 90 120 150
!90
!60
!30
0
30
60
90
!90
!60
!30
0
30
60
90
11- to 15-minute outages
Figure 7.13 Availability of the GPS constellation with a 5º mask angle with one satellite removedfrom the constellation.
• Date of prediction: The date for which the prediction is to be performed. TheGPS almanac can be used to accurately predict for approximately 7 days inthe future.
• Mask angle: The elevation angle above the horizon at which satellites are con-sidered visible by the GPS receiver.
• Terrain mask: The azimuth and elevation of terrain (buildings, mountains,and so on) that may block the satellite signal can be entered into the programto ensure an accurate prediction.
• Satellite outages: If any satellites are currently out of service, their status willbe reflected in the almanac data. However, if satellites are scheduled for main-tenance for a prediction date in the future, the software allows the user tomark those satellites unusable. This data can be obtained from the USCGNAVCEN Web site.
• Maximum DOP: As discussed previously, in order to determine availability, amaximum DOP threshold must be set (e.g., PDOP = 6). If the DOP exceedsthat value, the software will declare GPS to be unavailable. Other applicationsmay use criteria other than DOP as the availability threshold. This will be dis-cussed further in Section 7.3 for aviation applications.
Once these parameters have been input into the software, the prediction can beperformed. A prediction was performed for Boston (42.35ºN, 71.08ºW) on Decem-
7.4 GPS Availability 341
!150 !120 !90 !60 !30 0 30 60 90 120 150
1- to 5-minute outages6- to 10-minute outages
!150 !120 !90 !60 !30 0 30 60 90 120 150
!90
!60
0
30
60
90
!90
!60
!30
0
30
60
90
11- to 20-minute outages21- to 30-minute outages
31- to 40-minute outages41- to 65-minute outages
!30
Figure 7.15 Availability of the GPS constellation with a 5º mask angle with three satellitesremoved from the constellation.
Solo el 72% del tiempo la constelacion nominalesta disponible (por errores o reparaciones).Tıpicamente fallan 1, 2 o 3 satelites; el 98% del tiempohabra al menos 21 satelites.En la figura de la izquierda se muestra el PDOP para 24,23,22y 21 satelites con angulo de mascara 5%. Las disponibilidadesson respectivamente 100%, 99.969%, 99.903% y 99.197 %.Las zonas sin disponibilidad se muestran en la derecha para elcaso de 21 satelites. 40 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad IV
plied by the total system. Integrity includes the ability of a system to provide validand timely warnings to the user, known as alerts, when the system must not be usedfor the intended operation.
344 Performance of Stand-Alone GPS
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.18 Satellite visibility/availability over a 24-hour period.
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.19 Satellite visibility/availability over a 24-hour period with satellites 16, 25, and 26removed from the constellation.
plied by the total system. Integrity includes the ability of a system to provide validand timely warnings to the user, known as alerts, when the system must not be usedfor the intended operation.
344 Performance of Stand-Alone GPS
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.18 Satellite visibility/availability over a 24-hour period.
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.19 Satellite visibility/availability over a 24-hour period with satellites 16, 25, and 26removed from the constellation.
Tambien se pueden realizar analisis locales, con toda laconstelacion nominal o quitando satelites, con distintosangulos de mascara, etc...Por ejemplo la figura muestra un analisis local para Boston.Con tres satelites menos hay dos cortes al dıa.Para realizar este tipo de analisis es util software de analisisorbital, como por ejemplo STK (que se usara en las practicas).
41 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Continuidad
Se define continuidad (continuity) de un sistema denavegacion respecto a una mision u operacion, como laprobabilidad de que dicho sistema sea “utilizable” de formacontinua por toda la duracion de dicha mision u operacion.
Utilizable se define respecto a los requisitos mınimosrequeridos por la operacion o mision, puede venir dado enterminos de PDOP u otros terminos.
La continuidad depende mucho de la mision u operacion, peroen cualquier caso esta claramente relacionada con fallos noplanificados de satelites. La probabilidad estimada de que unsatelite deje de emitir de forma no planificada, es del0.0001 %.
42 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Integridad
Se define integridad (integrity) de un sistema de navegacioncomo la capacidad de dicho sistema para advertir que elsistema no debe ser utilizado (debido a que no esta operativoo contiene errores). Por tanto da una medida de la confianzaque se puede tener en el sistema.El sistema GPS no proporciona, por sı mismo, ningunmecanismo de integridad. Pueden suceder errores crıticos (aveces denominados “aberraciones”) que degraden el sistema.Por ejemplo:
Efectos de la radiacion en el espacio: pueden afectar a losrelojes o a la electronica de los satelites, provocando senalesanomalas.Fallos en los satelites.Error humano, de software o de hardware en el segmento decontrol.
Son errores raros que ocurren pocas veces al ano, pero no sonadmisibles para aplicaciones de navegacion aerea. 43 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Tecnicas de mejora de integridad
Puesto que la integridad es crıtica para muchas aplicaciones,como por ejemplo aviacion, se han implementando diversosmecanismos para proporcionar integridad al GPS.Las tecnicas de GSP diferencial (que veremos a continuacion)pueden proporcionar integridad.Una tecnica muy utilizada es la RAIM (Receiver AutonomousIntegrity Monitoring):
Es un algoritmo incorporado al receptor.Requiere al menos cinco satelites visibles: detecta lainconsistencia de la solucion y avisa que el GPS no debe serutilizado.Para ello emplea tecnicas estadısticas de estimacion.Si tiene al menos seis satelites visibles, es capaz de ignorar elsatelite y seguir proporcionando datos de navegacion fiables.
Observese que puesto que RAIM requiere 5 o 6 satelites, ladisponibilidad y continuidad con RAIM sera menor en general.
44 / 48

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial
Para mejorar la precision del GPS (o la integridad) se empleanlas tecnicas de GPS diferencial (DGPS).La idea basica es usar una o mas estaciones (pseudollites),cuya posicion se conoce con gran precision, equipadas con unreceptor GPS y en comunicacion con el usuario(GBAS=Ground-Based Augmentation Systems).Tambien se pueden emplear satelites extra que proporcionenmedidas adicionales (SBAS=Space-Based AugmentationSystems). Por ejemplo, la red europea EGNOS.Los sistemas DGPS se clasifican como:
Absolutos (ECEF) o relativos (posiciones relativas a laestacion).Por zona geografica de cobertura:
Locales (10-100 km)Regionales (menos de 1000 km)Wide-area (mas de 1000 km)
Basados en pseudodistancias o en fases (en fases son masprecisos, pueden conseguir precision de mm.) 45 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial: principios basicos de funcionamiento I
extremely important, since they directly influence the performance achievable forany type of DGPS system. The underlying algorithms and performance of code- andcarrier-based DGPS systems are presented in Sections 8.3 and 8.4, respectively.Some important DGPS message standards are introduced in Section 8.5. The finalsection, Section 8.6, details a number of operational and planned DGPS systems.
8.2 Spatial and Time Correlation Characteristics of GPS Errors
Many of the GPS error sources discussed in Chapter 7 are highly correlated overspace and time. All DGPS systems exploit these correlations to improve overall sys-tem performance. For instance, in a simple local-area DGPS system with a single ref-erence station (see Figure 8.1), the errors in the reference station’s pseudorange andcarrier-phase measurements for visible satellites are expected to be very similar tothose experienced by a nearby user. If the reference station estimates the errors byleveraging its known surveyed position and provides this information in the form ofcorrections to the user, it is expected that the user’s position accuracy will beimproved as a result. This section quantifies the correlation of GPS errors betweenreceivers separated over some distance (often referred to as the baseline, which maybe interpreted as a vector) and over time. Time correlations (i.e., how rapidly theerrors change with time), are also of interest, because in general DGPS systems can-not instantaneously provide data to the end user—even with a high-speed radio linkthere is some finite delay associated with the generation, transmission, reception,and application of the data.
8.2.1 Satellite Clock Errors
Satellite clock errors are one of the simplest GPS errors to correct. This is because asatellite clock error causes the same effect on pseudorange and carrier-phase mea-surements, regardless of the location of the user. For instance, if the satellite clock
8.2 Spatial and Time Correlation Characteristics of GPS Errors 381
User
Referencestation
Satellite
Figure 8.1 Local-area DGPS concept.
Ejemplifiquemos el funcionamiento delDGPS con un caso simple: GBAS,absoluto, local, basado en distancias ycon una sola estacion.
Recordemos que el usuario debeencontrar su posicion u resolviendo elsistema de 4 o mas ecuaciones"i ! ctu = $s i ! u$+ &u, donde &u
son los errores de las senales recibidaspor el usuario.
Supongamos ahora que se tiene una estacion (pseudollite) deposicion m = [xm ym zm]T ; su distancia al satelite i es:Rm
i = $s i !m$ =!
(xi ! xm)2 + (yi ! ym)2 + (zi ! zm)2.
Si tiene un error de reloj tm, las medidas de pseudodistanciaen la estacion seran: "m
i ! ctm = $s i !m$+ &m
46 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial: principios basicos de funcionamiento II
La posicion de la estacion es fija y conocida .Por tanto conocemos la cantidad""m
i = Rmi ! "m
i = !ctm ! &m.La estacion envıa ""m
i al receptor, y el receptor calcula("i )corr = "i + ""m
i = $s i ! u$+ c(tu ! tm) + (&u ! &m).Si definimos tum como el error del reloj del receptor respectoal reloj de la estacion, tum = tu ! tm observamos que("i )corr = $s i ! u$+ ctum + (&u ! &m).Por otro lado, & " = &u ! &m ! &u, porque &u y &m seran muyparecidos. Luego hemos conseguido reducir mucho el error.El nuevo tiempo que calculemos sera con respecto a laestacion. Pero la estacion puede calcular su error respecto alsatelite e incluirla en su mensaje de radio, de forma quetu = tum + tm. Luego recuperamos el tiempo GPS.Se consigue!UERE * 0,3m + (1! 6 cm)" (dEST!RECEP en km). 47 / 48
Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Calculo de la actitud mediante GPSCon DGPS de precision (basado en fases) se obtiene laactitud. Se situan n antenas receptoras en puntos separados dela aeronave y un unico receptor. Se calculan las diferencias deposicion entre antenas, asumiendo que los errores se cancelan.A cada una de estas diferencias las llamamos r i . Por ejemplosi hay 3 antenas habra 3 medidas. Si hay 4 antenas habra 6medidas. En general seran n!/(2" (n ! 2)!) medidas.Evidentemente rb
i es conocido. Lo que se mide es r ei .
Suponiendo la posicion conocida, calculamos rni = Cn
e r ei .
Queremos calcular Cbn de las ecuaciones rb
i = Cbn rn
i .Formemos las matrices Rb = [rb
1rb2 . . . rb
n] y Rn = [rn1r
n2 . . . rn
n].Se tendra que Rb = Cb
n Rn. Si las medidas fueran tres, sepodrıa hacer Cb
n = Rb(Rn)!1, pero conviene mejorRn = (Cb
n )TRb, luego Cbn = (Rn(Rb)!1)T . En general se
usara una solucion de mınimos cuadrados para mas medidas.El mınimo de medidas necesarias son 3; por tanto el mınimode antenas necesario sera de 3. 48 / 48

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Navegacion AereaTema 6: Sistemas de navegacion integrados. El filtro de
Kalman.
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Fusion de sensores.
Una aeronave actual dispone de una gran diversidad desensores y sistemas de navegacion, que pueden obtener total oparcialmente las variables de navegacion PVAT.
Por ejemplo hemos visto el INS, que a partir de las medidasde la IMU, el modelo de Tierra y gravedad, y una estimacioninicial, nos da posicion, velocidad y actitud en todo momento.
Tambien hemos visto el GPS, que igualmente es capaz dedarnos todos estos datos, o al menos (si no disponemos demultiples antenas), la posicion y la velocidad.
Puede haber otros sistemas (DME-DME, etc...)
Cada sistema dara una estimacion diferente, sujeta a error.
La idea de fusion de sensores y de los sistemas de navegacionintegrados, consiste en obtener una unica estimacion PVAT apartir de todas las anteriores, tal que el error sea el menorposible.
2 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Ejemplo: el canal vertical.
Se vio en el tema 4 que el canal vertical del INS es inestable.
Una forma de estabilizar el canal es usar la medida de altitudobtenida de medidas barometricas, hB . Se denomina“estimador baro-inercial de la altitud”.
Recordemos que las ecuaciones del canal vertical venıan dadaspor:
˙h = !VD ,˙VD = ρz +
µe
(Re + h)2,
donde ρz es la componente z de !(ωnn/e + 2ωn
e/i )×vn + an
NG .
3 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Estimador baro-inercial de la altitud I
Se modifica el canal vertical del INS de la siguiente forma,usando hB :
˙h = !VD ! C1(h ! hB),
˙VD = ρz +µe
(Re + h)2+ C2(h ! hB) + C3
∫ t
0(h(τ)! hB(τ))dτ,
donde C1, C2 y C3 son ganancias a determinar.Calculando como en el tema 4 el error de altitud ydespreciando el error en el termino ρz , obtenemos:
δh = !δVD + C1(h ! hB),
δVD " !2g0
Reδh ! C2(h ! hB)! C3
∫ t
0(h(τ)! hB(τ))dτ,
y observese que h ! hB = h ! h + h ! hB = !(δh ! δhB),donde δhB es el error de estimacion barometrico, quesuponemos aproximadamente constante.
4 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Estimador baro-inercial de la altitud II
Por tanto:
δh = !δVD ! C1(δh ! δhB),
δVD " !2g0
Reδh + C2(δh ! δhB) + C3
∫ t
0(δh ! δhB)dτ,
y tomando derivada en la primera ecuacion y sustituyendo lasegunda, obtenemos:
δh =2g0
Reδh ! C2(δh ! δhB)! C3
∫ t
0(δh ! δhB)dτ ! C1δh.
Tomando otra derivada y reescribiendo la ecuacion:
δ...h + C1δh + (C2 !
2g0
Re)δh + C3δh = C3δhB .
Los autovalores de esta ecuacion vienen dados por las raıcesdel polinomio s3 + C1s2 + (C2 ! 2g0
Re)s + C3.
5 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Estimador baro-inercial de la altitud III
Tıpicamente se eligen lo valores de C1, C2 y C3 para que losautovalores tengan parte real negativa (es decir, la ecuacionde δh sea estable). Una eleccion clasica es fijar un autovalor alvalor !λ y los otros dos a los valores !λ + jλ y !λ! jλ.
El polinomio caracterıstico serıa entonces:
(s + λ)(s + λ! jλ)(s + λ + jλ)
= (s + λ)(s2 + 2λs + 2λ2)
= s3 + 3λs2 + 4λ2s + 2λ3
Sustituyendo en el polinomio en funcion de los coeficientesestos valores, se llega a: C1 = 3λ, C2 = 4λ2 + 2g
Re, C3 = 2λ3.
Un valor tıpico elegido de λ es λ = 0,01.
6 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
El caso INS-GPS
El sistema de navegacion INS y el GPS son particularmentecomplementarios.El INS:
Da una estimacion continua en el tiempo.Su error crece con el tiempo.Posee un elevado ancho de banda (KHz).
El GPS:Proporciona una medida de alta precision pero discreta en eltiempo.El error esta acotado.Posee un bajo ancho de banda (Hz).
Una primera solucion serıa resetear el INS cada vez que seobtenga una medida GPS. Pero la medida GPS tampoco esexacta.
Por tanto hay que intentar, de algun modo, combinar el INS yel GPS para minimizar el error final.
7 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Fusion de sensores. Ejemplo: el canal vertical.INS-GPS
Tight Integration y Loose Integration
Existen dos formas de llevar a cabo la integracion:Loose Integration:
Este tipo de integracion permite tomar dos sistemas separados,un INS y un GPS, y a partir de las salidas de ambos, obteneruna estimacion comun.Es la forma mas simple de integrar GPS e INS.No requiere modificar las estimaciones internas de ambossistemas.
Tight Integration:Este tipo de integracion emplea las senales de entrada al INS yGPS, es decir, las medidas de giroscopos y acelerometros y losobservables GPS, y los integra directamente.Es mas complejo de desarrollar.No se emplean los algoritmos que hemos visto de GPS e INS,sino un unico algoritmo que integra los dos sistemas a la vez.Se obtienen estimaciones mas precisas que en la tipo loose.
En ambos casos, la herramienta clave para desarrollar laintegracion es el Filtro de Kalman y sus extensiones (FiltroExtendido de Kalman). 8 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El filtro de Kalman
El filtro de Kalman (KF) fue desarrollado por Rudolph E.Kalman, un ingeniero hungaro nacionalizado estadounidense.Presento su filtro a la NASA en 1960; la NASA buscaba unalgoritmo de fusion de sensores para el programa espacialApollo.Finalmente una version del KF fue utilizada en las misionesApollo para integrar las diferentes medidas de los sensores delvehıculo espacial.A dıa de hoy, el KF se emplea no solo en navegacion sino enmultitud de sistemas en los que se desea reconstruir una senalque evoluciona en el tiempo, a partir de medidas con ruido,por ejemplo en telefonos moviles.Realmente el KF solo sirve para sistemas lineales. Puesto quemuchos sistemas reales son no lineales, se han desarrolladoextensiones no lineales, conocidas como Filtro Extendido deKalman (EKF); en Navegacion se emplean este tipo de filtros.Nos limitaremos a entender el KF lineal y sus fundamentos. 9 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Procesos dinamicos discretos con medidas
PROCESO: Consideremos el siguiente modelo discreto de unproceso: x(tk+1) = Akx(tk) + Bkε(tk), donde x es un procesogaussiano con dimension nx , Ak es una matriz (que puedecambiar en cada instante de tiempo tk) de dimension nx $ nx ,ε(tk) es ruido blanco gaussiano de dimension nε y varianza Qk
(el ruido del proceso), y Bk es una matriz (que puede cambiaren cada instante de tiempo tk) de dimension nx $ nε.MEDIDA: En cada instante tambien consideramos que serealiza una medida, representada por z , y definida de lasiguiente forma: z(tk+1) = Hk+1x(tk+1) + ν(tk+1), donde zes la medida, de dimension nz , Hk es una matriz (que puedecambiar en cada instante de tiempo tk) de dimension nz $ nx ,y ν(tk) es ruido blanco gaussiano de dimension nν y varianzaRk (el ruido de medida).Ademas suponemos que ν(tk) y ε(tk) son independientes, yque sabemos que la condicion inicial de x esx(t0) # Nnx (x0,P0). 10 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ecuaciones del proceso y la medida
Resumiendo las ecuaciones:
x(tk+1) = Akx(tk) + Bkε(tk),
z(tk+1) = Hk+1x(tk+1) + ν(tk+1),
E [ε(tk)] = E [ν(tk)] = 0,
E [ε(tk)εT (tj)] = δkjQk ,
E [ν(tk)νT (tj)] = δkjRk ,
E [ε(tk)νT (tj)] = 0,
x(t0) # Nnx (x0,P0).
Definimos la estimacion en tk de x(tk) como x(tk).Definimos la covarianza del error de estimacion comoP(tk) = E [(x(tk)! x(tk))(x(tk)! x(tk))T ].El objetivo del filtro de Kalman es, empleando elconocimiento de las ecuaciones arriba formuladas, y a partirde las medidas z(tk), obtener la mejor estimacion posible, esdecir, el valor de x(tk) que minimiza P(tk). 11 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El filtro de Kalman I
Si solo tuvieramos el proceso, podemos calcular su media ytomamos x como dicha media; por tanto,x(tk) # Nnx (x(tk),Pk), donde:
x(tk+1) = Ak x(tk),
Pk+1 = AkPkATk + BkQkBT
k .
La idea de Kalman es decir: la estimacion arriba escrita esvalida antes de tomar la medida z(tk+1). Denotamos dichaestimacion “a priori” como x−(tk+1) y su covarianza comoP−k+1.
Ahora, si la estimacion fuera perfecta y la medida no tuvieraerror, se tendrıa que z(tk+1) = Hk+1x
−(tk+1). Como no esası, se actualiza la estimacion (“a posteriori”) de formaproporcional a la discrepancia:x+(tk+1) = x−(tk+1) + Kk+1(z(tk+1)! Hk+1x
−(tk+1)).12 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El filtro de Kalman II
En la ecuacionx+(tk+1) = x−(tk+1) + Kk+1(z(tk+1)! Hk+1x
−(tk+1)) lounico que no conocemos es Kk+1, que es la ganancia deKalman. Esta se determina para garantizar que la covarianzade x+(tk+1), P+
k+1, sea la menor posible.
Calculemos P+k+1:
P+k+1 = E [(x(tk+1)! x+(tk+1))(x(tk+1)! x+(tk+1))T ], y
sustituyendo la ecuacion de x+(tk+1):
P+k+1 = E
"„x(tk+1) − x+(tk+1)
« „x(tk+1) − x+(tk+1)
«T#
= E»„
x(tk+1) − x−(tk+1) − Kk+1(z(tk+1) − Hk+1 x−(tk+1)«
ׄx(tk+1) − x−(tk+1) − Kk+1(z(tk+1) − Hk+1 x−(tk+1))
«T#
Sustituyendo ahora z(tk+1) = Hk+1x(tk+1) + ν(tk+1):
P+k+1 = E
h“x(tk+1)! x−(tk+1)! Kk+1(Hk+1x(tk+1) + !(tk+1)! Hk+1 x−(tk+1)
”
"“x(tk+1)! x−(tk+1)! Kk+1(Hk+1x(tk+1) + !(tk+1)! Hk+1 x−(tk+1))
”T–
13 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El filtro de Kalman III
Simplificando, obtenemos:
P+k+1 = E
h“(I ! Kk+1Hk+1)(x(tk+1)! x−)! Kk+1!(tk+1)
”
"“(I ! Kk+1Hk+1)(x(tk+1)! x−)! Kk+1!(tk+1)
”T–
= (I ! Kk+1Hk+1)P−k+1(I ! Kk+1Hk+1)T + Kk+1Rk+1KTk+1
Es necesario encontrar el valor de Kk+1 que minimiza laanterior expresion. Usando calculo matricial, se encuentra que
Kk+1 = P−k+1HTk+1
(Hk+1P
−k+1H
Tk+1 + Rk+1
)−1
Sustituyendo esta expresion se llega a que:P+
k+1 = (I ! Kk+1Hk+1)P−k+1. Esta es la covarianza mınima.
14 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Algoritmo del filtro de Kalman
El algoritmo queda como sigue:1 En el instante de tiempo tk+1, suponemos que tenemos la
anterior estimacion que incluyo tambien la ultima medida:x+(tk) y su covarianza P+tk . Para k = 0 tomamosx+(t0) = x0 y P+
0 = P0.2 Fase de propagacion; usamos la ecuacion del sistema dinamico
para calcular la estimacion a priori:
x!(tk+1) = Ak x+(tk),
P!k+1 = AkP+k AT
k + BkQkBTk .
3 Preparandonos para la medida, calculamos la ganacia de
Kalman: Kk+1 = P!k+1HTk+1
(Hk+1P
!k+1H
Tk+1 + Rk+1
)!1.
4 Tomamos la medida y calculamos la estimacion a posteriori:
x+(tk+1) = x!(tk+1) + Kk+1(z(tk+1)! Hk+1x!(tk+1)),
P+k+1 = (I ! Kk+1Hk+1)P
!k+1.
5 Iteramos para los siguientes valores de k.15 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Sobre las medidas
Observacion: es posible que no se realice una medida cada tk ,sino que en ciertos instantes se hagan medidas, y en otros nose haga ninguna medida.
Por ejemplo podemos tener un sensor con bajo ancho debanda (como el GPS) mientras que nuestro tiempo demuestreo ∆t representa una elevada frecuencia.
Una forma de solucionarlo es tomar Hk = 0, luego Kk = 0 enlos instantes tk en los que no se realizan medidas. Por tantono es necesario realizar ninguna actualizacion yx+(tk) = x−(tk), P+(tk) = P−(tk).
16 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El caso INS-GPS
En el caso INS-GPS no podemos aplicar el Filtro de Kalmandirectamente porque los sistemas y medidas son no lineales.Lo que se hace es aplicar la solucion al error de navegacion.Recordemos que derivamos para el INS una ecuacion de laforma: δx(tk+1) = Akδx(tk) + Bkε(tk), donde el vector δx(tk)contiene los errores de posicion, velocidad y actitud en tk yε(tk) son las fuentes de error.Por otro lado en el tema del GPS obtuvimos ecuaciones de laforma: ∆ρ(tk+1) = Hk+1∆x(tk+1)+ν(tk+1), donde ∆x(tk+1)eran errores de posicion (y velocidad, si tambien estimamosvelocidad) respecto a una estimacion inicial y ∆ρ(tk+1) lasdiferencias entre los observables medidos y los estimados.Por tanto usando la medida del INS como estimacion para elGPS, ya tenemos los errores linealizados escritos de una formaadecuada para implementar el filtro de Kalman!El error estimado se suma a la posicion estimada por el INS,para conseguir la mejor estimacion final posible. 17 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
El caso INS-GPS
Esquema de la integracion INS-GPS (loose):
18 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman I
Para entender mejor el filtro de Kalman consideremos unsistema sencillo. Imaginemos un vehıculo que solo se puedemover en una direccion, con un acelerometro de un ancho debanda de 100Hz que mide la aceleracion en dicha direccion, ycon un sensor con un ancho de banda de 1Hz que estima laposicion en dicha direccion.El modelo del sistema sera:x = a. Llamando v a la velocidad:
d
dt
»xv
–=
»0 10 0
– »xv
–+
»0a
–
El modelo del error sera:d
dt
»"x"v
–=
»0 10 0
– »"x"v
–+
»01
–"a
Pasando a tiempo discreto y teniendo en cuenta queddt x(t) " x(tk+1)−x(tk )
!t :»
"x(tk+1)"v(tk+1)
–=
»1 !t0 1
– »"x(tk )"v(tk )
–+
»0
!t
–"a(tk )
19 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman II
Por otro lado el modelo de medida sera: z = x + ν, luego elmodelo de error sera: δz = δx + ν.Escribiendolo todo:
»"x(tk+1)"v(tk+1)
–=
»1 !t0 1
– »"x(tk )"v(tk )
–+
»0
!t
–"a(tk+1)
"z(tk+1) = "x(tk+1) + !(tk+1)
Ademas las medidas solo se hacen con una frecuencia de 1Hz(cada segundo), mientras que la frecuencia del acelerometroes 100 Hz con lo que deberıamos tomar ∆t = 0,01.Supongamos ademas que la precision de los instrumentos es:σ2
δa = 0,1, σ2ν = 0,01, y que se verifican las hipotesis del KF
(ruidos blancos gaussianos, independientes, etc...).En la nomenclatura que hemos usado para el KF, tendremos:
Ak =
»1 0,010 1
–, Bk =
»0
0,01
–, Qk = 0,1, Rk = 0,01, Hk =
! ˆ1 0
˜, tk = n
0, tk #= n.
donde n es cualquier entero (para modelar que se tomanmedidas cada segundo, pero no en fracciones de segundo).
20 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman IIIPor tanto las ecuaciones del filtro de Kalman diran, para cadainstante de tiempo tk+1:
»"x−(tk+1)"v−(tk+1)
–=
»1 0,010 1
– »"x+(tk )"v+(tk )
–
P−k+1 =
»1 0,010 1
–P+
k
»1 0
0,01 1
–+ 0,1
»0
0,01
– ˆ0 0,01
˜
Si tk+1 = n, es decir, tiene un valor entero, significa que hahabido medida. Entonces, calcular la ganancia de Kalman:Kk+1 = P−k+1
»10
– „ˆ0 1
˜P−k+1
»01
–+ 0,01
«−1.
Tomamos la medida y calculamos la estimacion a posteriori:»
"x+(tk+1)"v+(tk+1)
–=
»"x−(tk+1)"v−(tk+1)
–+ Kk+1("z(tk+1)!
ˆ1 0
˜ »"x−(tk+1)"v−(tk+1)
–,
P+k+1 = (I ! Kk+1
ˆ1 0
˜)P−k+1.
donde δz(tk+1) = z(tk+1)! Hk+1(x(tk+1) + δx−(tk+1)).Si no hubo medida, entonces simplemente:
»"x+(tk+1)"v+(tk+1)
–=
»"x−(tk+1)"v−(tk+1)
–, P+
k+1 = P−k+1.
Actualizamos x(tk+1) = x(tk+1) + δx+(tk+1). Iteramos paralos siguientes valores de k. 21 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman: simulacion I
Simulacion de la posicion (exacta) y medidas:
! "! #! $! %! &!! &"!!
'!
&!!
&'!
"!!
"'!
(!!
('!
)
*
*
+,-./.,0
123.34-
22 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman: simulacion II
Usando las medidas para estimar la posicion, el resultado esbueno porque el sensor es preciso y el movimiento en x eslento.
Si intentamos estimar la velocidad con la formulav(tk) = x(tk )−x(tk!1)
!t se obtiene una estimacion muy mala:! "! #! $! %! &!! &"!!'!
!
'!
&!!
&'!
"!!
"'!
(!!
('!
)
*
*
! "! #! $! %! &!! &"!!"
!&
!
&
"
(
#
'
$
+
%
)
*
*
,-./0/-1
234/45.
637-0/454
6*3.)/2545*43*234/45.
23 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman: simulacion III
Comportamiento de la estimacion y del error sin filtro deKalman:
! "! #! $! %! &!! &"!!
&!!
"!!
'!!
#!!
(
)
)
! "! #! $! %! &!! &"!!"
!
"
#
$
%
(
)
)
*+,-.-+/
0,(-12.-+/)30)*+,-.-+/
405+.-323
0,(-12.-+/)30)405+.-323
24 / 26

Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman: simulacion IV
Comportamiento de la estimacion y del error con filtro deKalman:
! "! #! $! %! &!! &"!!
&!!
"!!
'!!
#!!
(
)
)
! "! #! $! %! &!! &"!!"
!
"
#
$
(
)
)
*+,-.-+/
0,(-12.-+/)30)*+,-.-+/)4567
809+.-323
0,(-12.-+/)30)809+.-323)4567
25 / 26
Sistemas de navegacion integradosFiltrado optimo de sistemas lineales: el filtro de Kalman.
Deduccion del filtro de Kalman. Ecuaciones.Ejemplo de un filtro de Kalman
Ejemplo 1-D del filtro de Kalman: simulacion V
Comparacion de errores con y sin filtro de Kalman:
! "! #! $! %! &!! &"!!
&!
"!
'!
#!
(
)
)
! "! #! $! %! &!! &"!!
!*+
&
&*+
(
)
)
,--.-)/,)0.1232.4)5124)678
,--.-)/,)0.1232.4)53.4)678
,--.-)/,)9,:.32/;/)5124)678
,--.-)/,)9,:.32/;/)53.4)678
26 / 26





























