Embed Size (px)
Citation preview

20/11/2015
1
New possibilities of remote
sensing, point clouds, laser
scanning and UAV LS
Juha Hyyppä
Director, NLS/FGI, [email protected]
Director, CoE-LaSR
Prof., NLS/FGI, [email protected]
Content
• What is NLS/FGI?
• General Principles in Laser Scanning (LS)
• 3D Remote Sensing Comparison
• Autonomous driving & Information Systems & Decision
support systems
• Mini-UAV LS
• Personal and Mobile LS
• Plot level point clouds
2

20/11/2015
2
FGI • Research institute in National Land Survey of Finland (since 1.
Jan 2015)
• FGI was the most productive research environment in Finland (output/input)
• About 110 Staff (roughly 90 scientist)
• Budget roughly 10 MEU (mostly outside financed)
• Highly academic institute (nearly 50% staff has PhD)
• Publish around 60 ISI Web of Science peer reviewed articles (200 peer reviewed articles)
• Three joint professorships with universities
• The only Finnish research institute that coordinates Center of Excellence by Academy of Finland
Contribution to NLS Topographic Database
Crowdsourcing
Courtesy to JP Virtanen & J. Hyyppä, Aalto/FGI

20/11/2015
3
Key Research Areas
1. Reference Systems • National coordinate, height and gravity
systems
• Nummela standard baseline and Metsähovi research station
• Deformation networks (Nuclear safety)
• Photogrammetric and laser scanning test fields
2. Changing Earth • Land use change
• Land uplift and deformation
• Multitemporal remote sensing data analysis
• Global gravity change
• safety and environmental aspects
• Change of land topography
• Vegetation
3. Mobile Geomatics • Mobile mapping
• GNSS technologies
• Indoor – outdoor navigation
• smart mobile geospatial solutions
• Mobile GIS
4. Spatial Data Infrastructures • Interoperable, standardized data services
• Harmonization and quality of geospatial data
• Network-based processing services
• Use and usability of GI-data and applications
• Visualization and cartographic presentation
-4 -3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
4
5
Itä (m)
Pohjo
inen (
m)
GNSS
PPP-RTK
Mobile precise positioning with FinnRef
FinnRef
P3 service project
Users
Positioning
accuracy
targeting 0.5 m
Intelligent
transportation
systems

20/11/2015
4
Local deformations
3D Geographic Information for Hikers
In the MenoMaps - project a mobile map service for the hikers has been developed.
Department of Geoinformatics and Cartography

20/11/2015
5
Forest map
Courtesy to J. Oksanen et al. FGI
Wintermap
Courtesy to J. Oksanen et al. FGI

20/11/2015
6
https://youtu.be/lNwdSmQV_Fo
Courtesy to J. Oksanen et al. FGI
Centre of Excellence
in Laser Scanning Research:
“Together what is otherwise impossible”
Pulsed time-
of-flight laser
radar
Juha Kostamovaara
Univ. Oulu
Laser scanning
for precision
forestry
Markus Holopainen
Univ. Helsinki
Mobile and
ubiquitous
Laser
Scanning
Juha Hyyppä
FGI
Laser scanning
for built
environment
Hannu Hyyppä
Aalto Univ.
Hardware-driven approach
International benchmarking studies Courtesy to J. Hyyppä. FGI

20/11/2015
7
Development of new sensors and test
their feasibility for various applications
Courtesy to A. Jaakkola, FGI
Solid Potato Oy – Your partner in R&D
14

20/11/2015
8
General Principles in Laser
Scanning
Fundamentals of multiple discrete return
technology
3rd return
from ground
1st return
from tree top
2nd return
from branches 1st (and only)
return from
ground
Courtesy to Leica

20/11/2015
9
ALS Output
Output: x,y,z, intensity !
Courtesy to Hannu Hyyppä, Petri Rönnholm,Aalto
Platforms for Laser Scanning
TLS
Terrestrial Laser Scanning
MLS
Mobile Laser Scanning
ALS
Airborne Laser Scanning
Courtesy to Hyyppä, Kukko, Kaartinen, Jaakkola FGI

20/11/2015
10
Characteristics of LS
Airborne Laser Scanning
• Point density 0.5-40 pts/m2
• Homogenous point density
• Elevation accuracy 5-30 cm
• Planimetric accuracy 20-80 cm
• Few hundred m to several km
• Transfer costs
• Cost-effective for areas larger than 50km2
• Multitemporal ALS applications studied relatively little (Murakami et al. 1999, Yu et al. 2004)
• Reference book Shan and Toth (2009), Vosselman and Maas (2009)
Airborne mini-UAV scanning
• New research area (idea in Zhao
et al., 2006, first demo for
mapping Jaakkola et al. 2010)
• Point density 10-several hundred
pts/m2
• Elevation accuracy 5-30 cm
• Altitude tens of m
• Usable for research and
multitemporal studies
• Presently commercial applications
• Reduces CO2 consumption of
research
Courtesy to J. Hyyppä, FGI
Characteristics of LS
Mobile laser scanning
• Point density in the range of 100 to several thousands pts/m2
• More homogeneous (TLS) point density
• Point accuracy of few centimeters (egg) when collected with good GNSS coverage
• Applicable range of few tens of m
• Viewing angle different from ALS
• Higher variation in the range data (e.g. round traffic poles are not round in the data)
• Vast data sets when data collection is done continuously
• Need for automatic and interactive algorithms
Terrestrial Laser Scanning
• Point density in the range of 10000 pts/m2 at the 10 m distance
• Distance accuracy of few mm to 1-2 cm
• Operational scanning range from 1 to several hundred m
• Feasible for small areas less than few tens of m distance
• Processing time challenging: image processing technigues applied
• Small variation in data, e.g. Distance variation low -> surface normal etc can be calculated
• Reference book: Vosselman and Maas (2009)
Courtesy to J. Hyyppä, FGI

20/11/2015
11
MLS Point Cloud Processing 1/2
21
Attribute
Extraction
Classification of
Segments
Object
Location
Prediction
Point Segments
Unorganised 3D Point Cloud
Predicted Object locations
Segmentation Removal of
Ground and
Facades
Pre-
Processing
Courtesy to M. Lehtomäki, FGI
MLS Point Cloud Processing 2/2
22
Point Cloud Ground Removed
Segmented/clustered Classified Segments
Tree
Lamp post
Traffic sign
Car
Pedestrian
Undefined
Courtesy to M. Lehtomäki, FGI

20/11/2015
12
Matikainen, L., Hyyppä, J., and H.
Hyyppä, 2003. Automatic detection of
buildings from laser scanner data for
map updating. Workshop '3-D
reconstruction from airborne
laserscanner and InSAR data', Dresden,
Germany 8-10 October 2003. The
International Archives of
Photogrammetry, Remote Sensing and
Spatial Information Sciences, Vol.
XXXIV, Part3/WG13, 218-224.
OK
New
Not found
Classified as
tree
First publication in using
LS in map updating
Courtesy to L. Matikainen, FGI
3D Remote Sensing
Comparison

20/11/2015
13
DTM, DSM, nDSM
DSM
DEM, DTM
CHM, nDSM
Courtesy to St-Onge
25x25 m

20/11/2015
14
2x2 m
Interpreting ALS Point Clouds
DTM
DSM
nDSM
Crown Volume
Near-Surface Vegetation
Tree Stems
Courtesy to TU Wien

20/11/2015
15
Utilizing individual
tree information in
laser assisted forest
inventory
Point clouds – future of
forest resource
assessment
3D Remote Sensing comparison
• Airborne and Spaceborne systems, 90 plots
• Helicopter LS & Tomoradar (tbd)
• ALS (2 point densities)
• ALS Full Waveform (Finnmap)
• NLS open data 2012
• Airborne images
• ALS data
• SAR
• Tandem X interferometry 2012-2013
• TerraSAR X Radargrammetry
• Worldview Stereo

20/11/2015
16
Relative RMSE for forest attribute estimates using area-based approach and random
forest based on various RS 3D data and 91 sample plots of 32 m x 32 m size.
31
0,00
5,00
10,00
15,00
20,00
25,00
30,00
35,00
ALS-900m ALS-2500m ALS-NLS AP WV2 TSX TDX
RM
SE
(%
) Mean height (m)
Mean DBH (cm)
Basal area (m2/ha)
Volume (m3/ha)
Biomass (Mg/ha)
Courtesy to X. Yu, FGI
Autonomous Driving
Information Systems
Decision Support Systems
20/11/2015
17
33
Courtesy to A. Jaakkola, FGI
34
Courtesy to A. Jaakkola, FGI

20/11/2015
18
Full process chain merging virtual and
physical worlds Zhu, L., Hyyppä, J., Kukko, A., Kaartinen H., and R. Chen,
2011. Photorealistic building construction from mobile laser
scanning data. Remote Sensing 3(7), 1406-1426
Indoor MLS
Courtesy to R. Kaijaluoto, FGI

20/11/2015
19
37
Courtesy to A. Jaakkola, FGI
Page 38
Forest SLAM based driver support and forest inventory system
• Forest SLAM
• Driver selects the trees to be harvested in the HMI display
• Semiautomatic control of movements of the crane and harvester head in normal easy conditions
• Driver has more time for perception and decision making
• The collected map of trees improves the analysis and planning of forest operations when uploaded to GIS
Partner: Aalto, Finnish Forest Research
Institute
Companies: Ponsse, Parker-Vansco, UPM-
Kymmene, Stora-Enso, Metsäliitto, Metsäteho
Courtesy to A. Visala, Aalto
20/11/2015
20
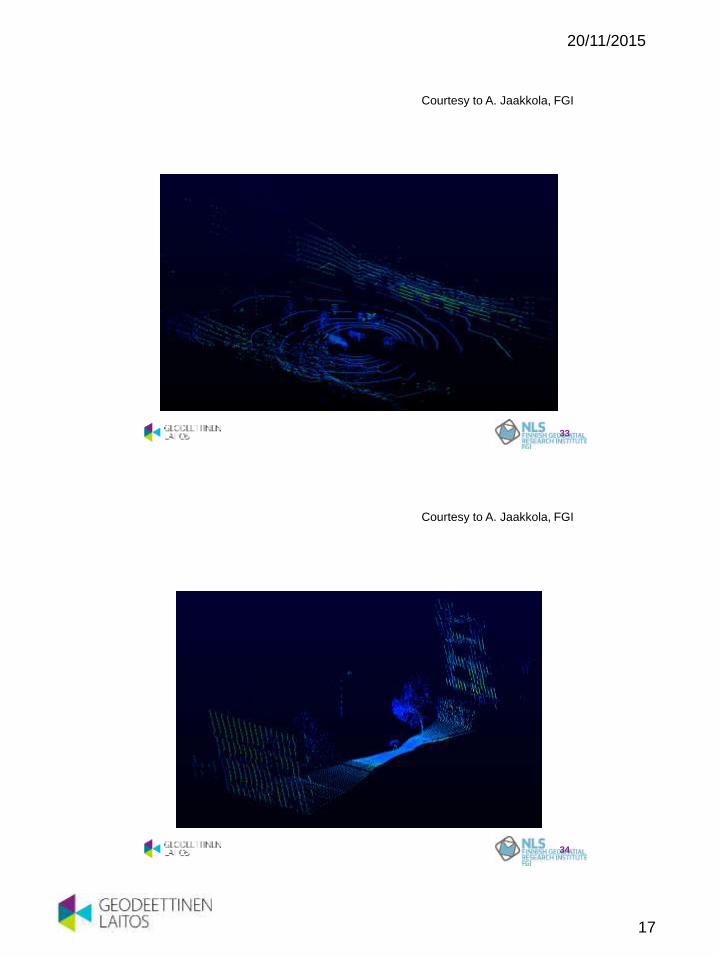
Mini-UAV Laser Scanning
FGI Sensei – first mini-
UAV LS (2009)
• NovAtel SPAN-CPT
• Ibeo Lux/Sick LMS151
• AVT Pike F-421C
• Specim V10H
• Flir Photon 320 2nd generation
Courtesy to A. Jaakkola, FGI

20/11/2015
21
Jaakkola, A., Hyyppä, J., Kukko, A., Yu, X., Kaartinen, M., Lehtomäki, M., and Y. Lin, 2010, A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS journal of Photogrammetry and Remote Sensing 65 (6), 514-522
World’s first mini-UAV Laser Scanner SENSEI
3rd gen UAV LS
• Lighter
• Higher PRF
• Better range accuracy
• Better planimetric accuracy

20/11/2015
22
Applications and Impact
• Ecological for measurements (no transfer cost/pollution of
large planes)
• Effective for Change-detection and multitemporal surveys
(data also obtained when needed)
• Simulates ALS, but also for reference data collection
• Costs are going down
• New UAV applications
• Powerline measurements
• Operational pilot in September 2014 (first in the world)
UAV LS
44
20/11/2015
23
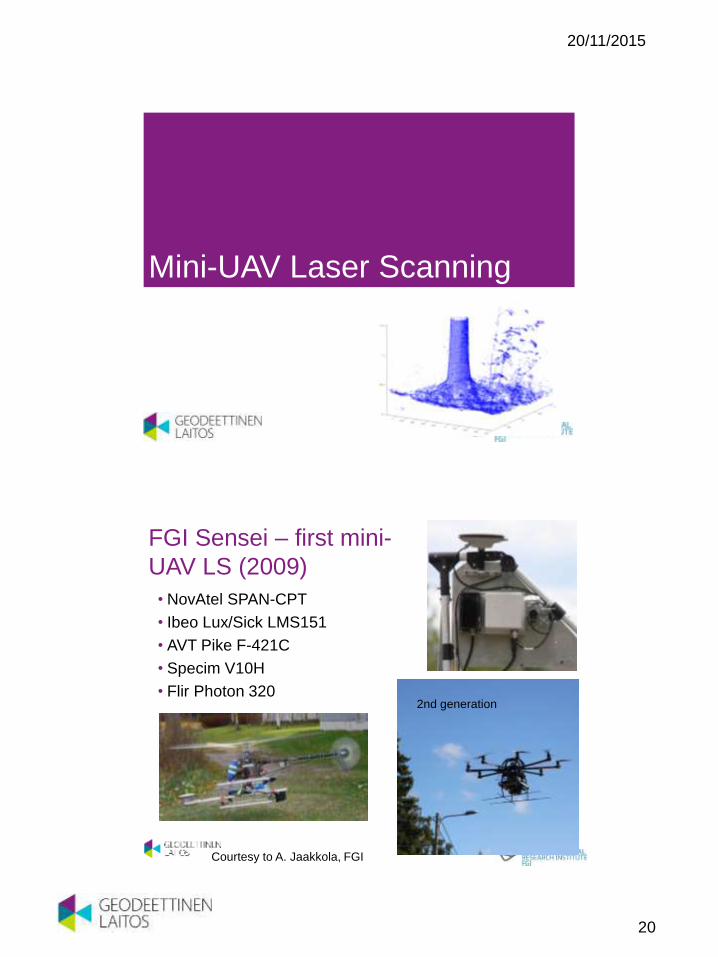
Tree Extraction with SENSEI
Method n Horizontal mean Horiz. StDev Height mean Height StDev
Manual 17 40 cm 14 cm -15 cm 30 cm
Automatic 55 110 cm 56 cm 2 cm 34 cm
100 200 300 400 500 600 700
100
200
300
400
500
600
700
8000
5
10
15
20
Jaakkola, A., Hyyppä, J., Kukko, A., Yu, X., Kaartinen, M., Lehtomäki, M., and Y. Lin, 2010, A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS journal of Photogrammetry and Remote Sensing 65 (6), 514-522
46
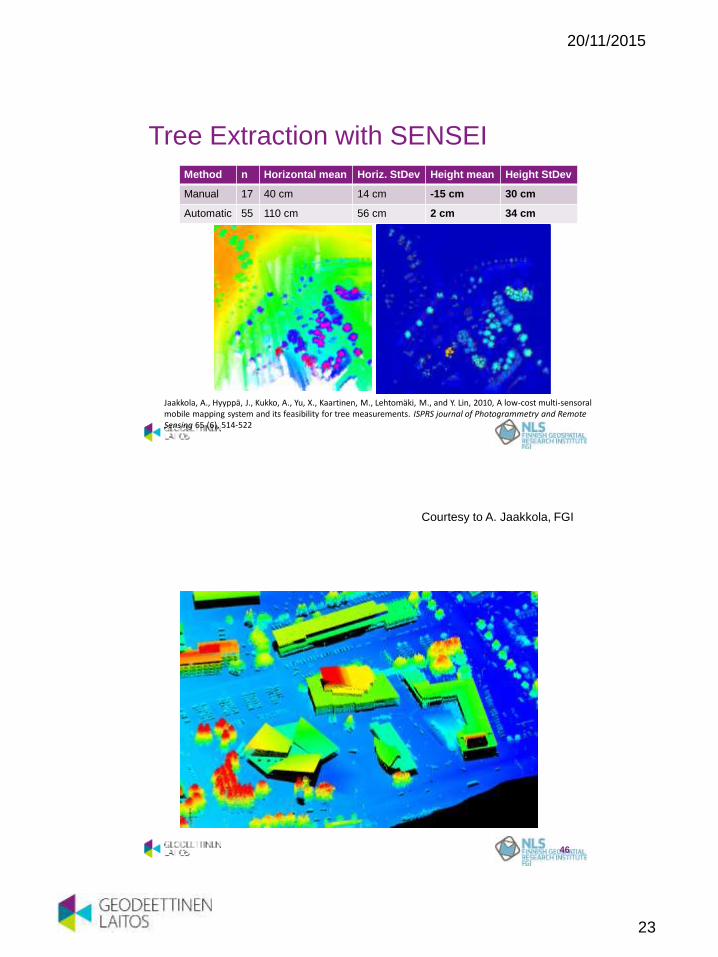
Courtesy to A. Jaakkola, FGI

20/11/2015
24
47
Courtesy to A. Jaakkola, FGI
20/11/2015
25
World’s first mini-UAV-LS operational
corridor mapping, Sept 2014
Courtesy to A. Jaakkola, FGI
50
Courtesy to A. Jaakkola, FGI
20/11/2015
26
Mobile and Personal
Laser Scanning: System
and applications Dr. Antero Kukko
Centre of Excellence in Laser Scanning Research
Finnish Geospatial Research Institute FGI
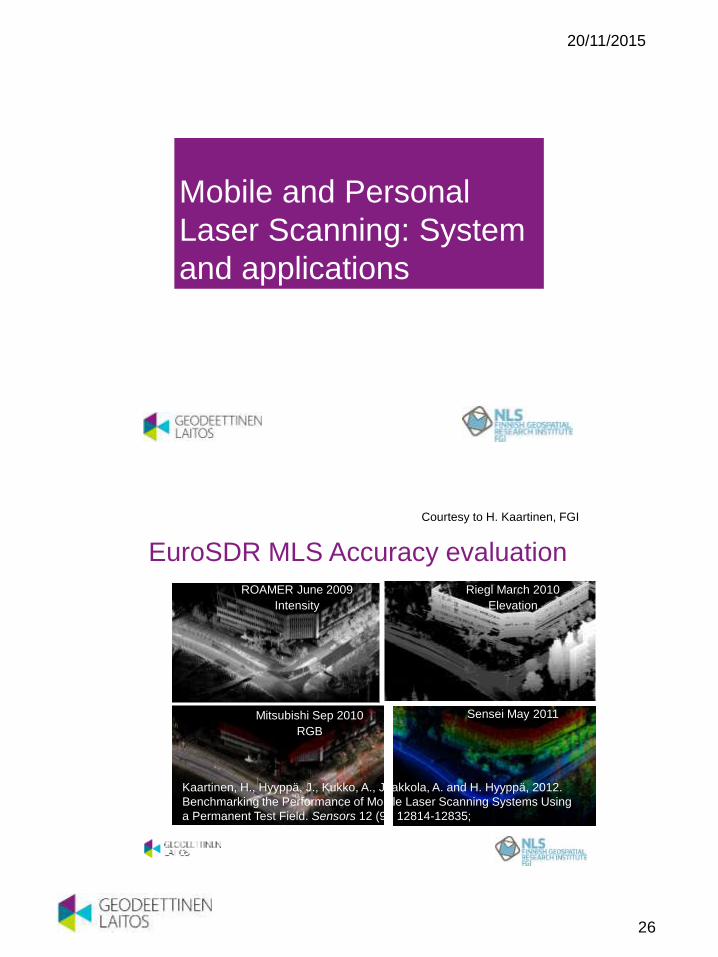
EuroSDR MLS Accuracy evaluation
ROAMER June 2009
Intensity
Mitsubishi Sep 2010
RGB
Riegl March 2010
Elevation
Sensei May 2011
Kaartinen, H., Hyyppä, J., Kukko, A., Jaakkola, A. and H. Hyyppä, 2012.
Benchmarking the Performance of Mobile Laser Scanning Systems Using
a Permanent Test Field. Sensors 12 (9), 12814-12835;
Courtesy to H. Kaartinen, FGI

20/11/2015
27
MLS Accuracy Evaluation • Elevation error vs. distance
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.0 5.0 10.0 15.0 20.0 25.0 30.0 35.0
Ele
va
tio
n e
rro
r [m
]
Distance from trajectory [m]
MLS A
MLS A recalibrated
MLS B
MLS B recomputed
MLS C
MLS D
MLS E
Courtesy to H. Kaartinen, FGI
• GNSS-IMU Positioning
• Ultra High Speed Laser
Scanner
• Cross-track Profiling
• To gain:
• Mobility and accessibility
• Efficiency
• Object complexity
54
PLS - Integrated Technology
For collecting 3D data on the move
(i.e. mobile mapping)
Courtesy to A. Kukko, FGI

20/11/2015
28
PLS under thick canopy
• In GNSS shadowed areas accuracy is reduced
due to the loss of signal:
• RMSE XY: 0.73 m
• STD XY: 0.82 m
• RMSE h: 1.10 m
• 8 targets,
• n=53,
• traj. length 3 km
Trajectory correction:
mean XY 15.9 cm
and h 8.1 cm
55
Courtesy to A. Kukko, FGI
PLS in Forestry
• For collecting complete structural data in complex environments
• Automation in tree inventories at plot and individual tree level
Liang et al., 2014
56
Courtesy to A. Kukko & X. Liang, FGI

20/11/2015
29
Industrial engineering
57
• As-built inventories for plant layout design
• Existing structures
• Pipelines
• Connections
• Masses and materials
• Complex scenes
• Demand for level of detail
• Demand for accuracy
Courtesy to A. Kukko, FGI
Frame-based
Spectrometry Dr. Antero Kukko
Centre of Excellence in Laser Scanning Research
Finnish Geospatial Research Institute FGI

20/11/2015
30
FGI hyperspectral, photogrammetric UAV
measurement system: Summer 2014 setup
59
Courtesy to E. Honkavaara, FGI
Output products: hyperspectral image
mosaics, DSMs, point clouds, spectra, BRF,
σXYZ, σρ
0
0.1
0.2
0.3
0.4
0.5
0.6
500 700 900
Re
fle
cta
nce
Wavelength (nm)
2724
2512
2028
1497
994
632
Courtesy to E. Honkavaara, FGI

20/11/2015
31
Utilizing individual
tree information in
laser assisted forest
inventory
New Sensor Technology – Future
of Remote Sensing and GIS